Manufacturing Technology (ME461) Lecture4

of 13
-
Upload
jayant-raj-saurav -
Category
Documents
-
view
227 -
download
0
Transcript of Manufacturing Technology (ME461) Lecture4
-
8/12/2019 Manufacturing Technology (ME461) Lecture4
1/13
Manufacturing Technology
ME461
Instructor: Shantanu Bhattacharya
-
8/12/2019 Manufacturing Technology (ME461) Lecture4
2/13
Review of previous lecture
Concatenation and compounding for series of
transformations.
Practical problem of compounding. Non-parametric representation (implicit and
explicit cases).
Example problem of straight line.
-
8/12/2019 Manufacturing Technology (ME461) Lecture4
3/13
Non parametric representation
(Explicit case)
Non parametric equations of curves can be further dividedinto explicit and implicit nonparametric equations. The explicit
non parametric representation of general two dimensional
and three dimensional curves taken the form:
-
8/12/2019 Manufacturing Technology (ME461) Lecture4
4/13
Non parametric representation
(Implicit case)
The implicit non parametric representation of a general n-dimensionalspace curve takes the form:
This equation must b solved analytically to
obtain the explicit form, which is not easily done
by computer.
-
8/12/2019 Manufacturing Technology (ME461) Lecture4
5/13
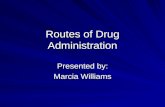
Example Problem
Develop the non
parametric
equation for the
ellipse as shownin the figure on
the left.
2A
-
8/12/2019 Manufacturing Technology (ME461) Lecture4
6/13
Solution
-
8/12/2019 Manufacturing Technology (ME461) Lecture4
7/13
Parametric Representation of
Synthetic curves
Analytic curves, are usually well defined and studied.
However, in the geometric design of mechanical
parts, some other curves are required.
One familiar example is the car body which contains
curves which not only envelop inside the mechanical
part but also help reduce air resistance.
Other examples might include fuselage, wings, andpropeller blades of airplanes, whose shape is based
on aerodynamic and fluid flow simulation.
-
8/12/2019 Manufacturing Technology (ME461) Lecture4
8/13
Parametric representation of synthetic curve
Generally speaking, a goodrepresentation ofengineering objects has to
have the followingproperties:
1. Easy to control thecontinuity of the curvesto be designed.
2. Requires less storage torepresent a curve.
3. Less computation timeand no computationalproblems.
4. Easy to input by user.
-
8/12/2019 Manufacturing Technology (ME461) Lecture4
9/13
Concept of continuity Intuitively, continuity means the smoothness of the connection of two
curves or surfaces at the connection of two curves or surfaces at the
connection points or edges.
Normally, three types of continuity, called C0, C1, C2 are defined to
characterize the smoothness of connection of two curves. C0continuity
implies simply connecting two curves. That means that the gradients of
these curves at the point of joining
In C1continuity, the gradients
at the point of joining must be
same.
However, C2 implies curvature
continuity; that is , not onlygradient but also the center of
curvature is the same.
Curves that are constructed by many curve segments are called synthetic curves.
Different types of curve segments can be used to construct synthetic curves, with certain
continuity requirements. They are easier in controlling their continuity requirements and
plotting them is computationally less intensive.
-
8/12/2019 Manufacturing Technology (ME461) Lecture4
10/13
Types of synthetic curves
Hermite cubic spline
Bezier cruves
B-Spline curves
Rational B-Splines
Nonuniform rational B-Spline
-
8/12/2019 Manufacturing Technology (ME461) Lecture4
11/13
Hermite Cubic Spline The main idea of the Hermite cubic spline is that a curve is divided into segments. Each
segment is approximated by an expression, namely a parametric cubic function.
The reasons for using cubic functions to approximate the segments are:
1. A cubic polynomial is the minimum order polynomial function that generates C0, C1,
C2 continuity curves.
2. Higher order polynomials have some drawbacks, such as oscillation about control
points, and are uneconomical in terms of storing information and computation.
D i ti f th t
-
8/12/2019 Manufacturing Technology (ME461) Lecture4
12/13
Derivation of the parameter
equation
This form can be adjusted to yield
various shapes of curve segment by
altering one or more of V(0), V(1),V(0) and V(1) appropriately.
The Hermite form of a cubic spline
is determined by defining positions
and tangent vectors at the data
points.
There are some disadvantages of
this method. For example,
1. First order derivatives are
needed; it is not convenient fora designer to provide first order
derivative.
2. The order of the curve is
constant regardless of the no,.
of data points.
-
8/12/2019 Manufacturing Technology (ME461) Lecture4
13/13
Example Problem
Determine and plot the equation of Hermite
form of a cubic spline form given position
vectors and slopes at the data points with
vector magnitude equal to 1.
Point 1: A= [1,2]T, slope A= 60 deg.
Point 2: B= [1,3]T, slope B = 30 deg.