
Manual Indra Drive FC
236
Rexroth IndraDrive Fc Controladores de accionamiento Convertidor de frecuencia FCS01 R911316960 Edición 01 Electric Drives and Controls Pneumatics Service Linear Motion and Assembly Technologies Hydraulics
-
Upload
juan-carlos-lillo-rocha -
Category
Documents
-
view
756 -
download
0
Transcript of Manual Indra Drive FC
Rexroth IndraDrive FcControladores de accionamiento Convertidor de frecuencia FCS01
R911316960Edición 01
Instrucciones de uso
Electric Drivesand Controls Pneumatics Service
Linear Motion and Assembly TechnologiesHydraulics
Acerca de esta documentación Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Rexroth IndraDrive Fc
Controladores de accionamiento
Convertidor de frecuencia FCS01
Instrucciones de uso
DOK-INDRV*-FCS01******-IB01-ES-P
Número de documento: 120-2400-B323-01
Esta documentación proporciona información:
• sobre el montaje mecánico y eléctrico
• sobre las condiciones de conexión
• sobre la puesta en servicio de los aparatos
• sobre la parametrización básica de los aparatos
• sobre los mensajes de error, con indicaciones sobre la causa y solución
Identificación de la documentación de las ediciones publicadas
Estado Nota
DOK-INDRV*-FCS01******-IB01-DE-P 04.05 1ª edición (provisional)
DOK-INDRV*-FCS01******-IB01-DE-P 27.07 1ª edición corregida (provisional); datos CEM
DOK-INDRV*-FCS01******-IB01-DE-P Nov.05 2ª edición corregida
Bosch Rexroth AG, 2005
Salvo autorización expresa, quedan prohibidas la reproducción de este documento, la explotación y la divulgación de su contenido. Las infracciones de esta prohibición obligan al pago de una indemnización por daños y perjuicios. Reservados todos los derechos en caso de concesión de patente o registro de modelo de utilidad. (DIN 34-1)
Los datos indicados sirven únicamente para la descripción del producto y no se pueden considerar como características aseguradas en el sentido legal. Reservado el derecho de introducir modificaciones en el contenido de la documentación y las posibilidades de suministro de los productos.
Bosch Rexroth AG Bgm.-Dr.-Nebel-Str. 2 • D-97816 Lohr a. Main
Teléfono +49 (0)93 52 / 40-0 • Tx 68 94 21 • Fax +49 (0)93 52 / 40-48 85
http://www.boschrexroth.com/
Dpto. EDY1 (rr/cg/hp)
Esta documentación está impresa en papel blanqueado sin cloro.
Título
Clase de documentación
Tipo de documentación
Nota interna para el archivado
Finalidad de la documentación
Modificación
Copyright
Compromiso
Edición
Nota
Rexroth IndraDrive FCS01.1 Índice I
DOK-INDRV*-FCS01******-IB01-ES-P
Índice
1 Introducción 1-1
1.1 Acerca de esta documentación .................................................................................................... 1-1 1.2 Abreviaturas utilizadas.................................................................................................................. 1-2 1.3 Presentación del sistema.............................................................................................................. 1-4
Rexroth IndraDrive C y Rexroth IndraDrive Fc........................................................................ 1-4
2 Advertencias de seguridad para accionamientos y controles eléctricos 2-1
2.1 Introducción .................................................................................................................................. 2-1 Antes de la puesta en servicio y de la manipulación de accionamientos y controles eléctricos.................................................................................................................................. 2-1 Condiciones para la manipulación de accionamientos y controles eléctricos y para su uso ...................................................................................................................................... 2-1 Explicación de los símbolos de aviso y los niveles de peligro ................................................ 2-3
2.2 Peligros en caso de uso incorrecto .............................................................................................. 2-4 2.3 Protección contra el contacto con elementos eléctricos .............................................................. 2-5 2.4 Protección contra descargas eléctricas con baja tensión de protección (PELV) ................... 2-7 2.5 Protección contra movimientos peligrosos ................................................................................... 2-7 2.6 Protección contra campos magnéticos y electromagnéticos en el funcionamiento y
montaje ......................................................................................................................................... 2-9 2.7 Protección contra el contacto con elementos calientes ............................................................. 2-10 2.8 Protección en el manejo y el montaje......................................................................................... 2-10 2.9 Seguridad en el manejo de pilas ................................................................................................ 2-11 2.10 Protección contra conductos bajo presión.................................................................................. 2-12
3 Indicaciones importantes para el uso 3-1
3.1 Uso correcto ................................................................................................................................. 3-1 Introducción ............................................................................................................................. 3-1 Ámbitos de uso y aplicación .................................................................................................... 3-2
3.2 Uso no correcto ............................................................................................................................ 3-2
4 Introducción 4-1
4.1 Generalidades .............................................................................................................................. 4-1 4.2 Propiedades FCS01 ..................................................................................................................... 4-1
5 Entrega 5-1
5.1 Volumen de suministro ................................................................................................................. 5-1
6 Homologaciones y tipos 6-1
6.1 Homologaciones ........................................................................................................................... 6-1
II Índice Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Conformidad CE ...................................................................................................................... 6-1 Homologaciones UL y cUL ...................................................................................................... 6-1
6.2 Códigos de identificación.............................................................................................................. 6-2 Código de identificación del convertidor de frecuencia FCS01............................................... 6-2 Código de identificación del módulo funcional FCC01............................................................ 6-2 Código de identificación de la resistencia de frenado FLR01 ................................................. 6-3 Código de identificación del accesorio FAS01 (interruptor de temperatura) .......................... 6-3 Código de identificación del accesorio FAS02 (conexión de la pantalla) ............................... 6-4
6.3 Componentes del IndraDrive Fc................................................................................................... 6-5
7 Montaje 7-1
7.1 Montaje ......................................................................................................................................... 7-1 7.2 Dimensiones de los convertidores de frecuencia FCS01............................................................. 7-2
8 Instalación 8-1
8.1 Soportes para montaje mural del FCS01 ..................................................................................... 8-1 8.2 Resistencias de frenado FLR01 ................................................................................................... 8-2
Datos técnicos FLR01 ............................................................................................................. 8-4 8.3 Directrices de cableado ................................................................................................................ 8-6 8.4 Conexión de potencia eléctrica .................................................................................................... 8-9
X3, Conexión a la red (PE, L1, L2/N, L3) .............................................................................. 8-11 X31, Relé 1 (1, 2), relé 2 (3, 4) .............................................................................................. 8-12 X5, Conexión del cable del motor (PE, U, V, W)................................................................... 8-12 X5, Conexión de la resistencia de frenado (+B, -B) .............................................................. 8-13 X5, Acoplamiento de tensión continua (+B, -DC).................................................................. 8-14 Ajustes para la reducción de las corrientes de fuga.............................................................. 8-15
8.5 Conexión de control eléctrica ..................................................................................................... 8-17 Detalles de las conexiones de control................................................................................... 8-18
9 Indicación y manejo de los módulos funcionales 9-1
9.1 Elementos de indicación en el aparato básico FCS01................................................................. 9-1 9.2 Módulos FCC01............................................................................................................................ 9-1 9.3 Vista general de los módulos funcionales FCC01........................................................................ 9-2
Elemento de operación estándar FCC01.1T-STD-NNNN....................................................... 9-4 Elemento de operación de confort FCC01.1T-CMF-NNNN .................................................... 9-9 Parámetros del elemento de operación de confort ............................................................... 9-16 Mensajes de error del elemento de operación de confort..................................................... 9-19
9.4 Módulos de comunicación principal............................................................................................ 9-22 Módulos Profibus FCC01.1F-PB1-NNNN / -PB2-NNNN....................................................... 9-22 Módulo CANopen FCC01.1F-CN1-NNNN ............................................................................ 9-25 Módulo DeviceNet FCC01.1F-DN1-NNNN ........................................................................... 9-27
10 Puesta en marcha 10-1
10.1 Ajustes básicos........................................................................................................................... 10-1 10.2 Configuración mínima de las conexiones de control.................................................................. 10-3
Rexroth IndraDrive FCS01.1 Índice III
DOK-INDRV*-FCS01******-IB01-ES-P
11 Parametrización 11-1
11.1 Indicación de servicio ................................................................................................................. 11-4 11.2 Parámetros básicos .................................................................................................................... 11-6 11.3 Datos del motor / parámetros de curva característica.............................................................. 11-12 11.4 Bornes de control...................................................................................................................... 11-17 11.5 Parámetros adicionales ............................................................................................................ 11-34 11.6 Informaciones ........................................................................................................................... 11-45 11.7 Vista general de parámetros, ajustes del usuario .................................................................... 11-52
12 Mensajes de fallo 12-1
12.1 Elementos de indicación en el aparato básico FCS01............................................................... 12-1 12.2 Indicación en los módulos funcionales FCC01.1T-xxx............................................................... 12-1
13 Datos técnicos 13-1
13.1 Datos generales FCS01 ............................................................................................................. 13-1 13.2 Datos eléctricos .......................................................................................................................... 13-3
Datos eléctricos de los aparatos de 230 V............................................................................ 13-3 Datos eléctricos de los aparatos de 400 V............................................................................ 13-4 Derating de los datos eléctricos ............................................................................................ 13-5
13.3 Datos electrónicos para la homologación UL/cUL ..................................................................... 13-9 13.4 Compatibilidad electromagnética (CEM) .................................................................................. 13-10
Clases de valores límite CEM alcanzables (en preparación).............................................. 13-11
14 Información adicional 14-1
14.1 Procesamiento de valores nominales en el FCS01 ................................................................... 14-1 14.2 Regulador de proceso ................................................................................................................ 14-2
Ejemplo de aplicación regulador de proceso ........................................................................ 14-3 Ajustes de parámetros del regulador de proceso.................................................................. 14-4
15 Comunicación principal: buses de campo y protocolos 15-1
15.1 Vista general ............................................................................................................................... 15-1 15.2 Profibus DP................................................................................................................................. 15-2
Protocolo Profibus ................................................................................................................. 15-2 Descripción del bus Profibus ................................................................................................. 15-3 Parametrización Profibus ...................................................................................................... 15-4 Control de errores Profibus e indicación ............................................................................... 15-5 Profibus - estructura de los datos útiles ................................................................................ 15-6 Estructura del telegrama Profibus ......................................................................................... 15-8 Transferencia de datos Profibus - telegramas ejemplares.................................................. 15-19 Transferencia de datos Profibus - máquina de estado ....................................................... 15-22 Parámetros estándar PROFIDRIVE.................................................................................... 15-24 Transferencia de datos consistente .................................................................................... 15-24
15.3 CANopen .................................................................................................................................. 15-25 Protocolo CANopen............................................................................................................. 15-26 Descripción del bus CANopen............................................................................................. 15-27 Parametrización CANopen .................................................................................................. 15-27
IV Índice Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Control de errores CANopen e indicación.......................................................................... 15-29 Transferencia de datos CANopen - objetos de datos de proceso PDO ............................. 15-30 Estructura del telegrama CANopen..................................................................................... 15-32 Transferencia de datos CANopen - ejemplo ....................................................................... 15-35 Transferencia de datos CANopen - máquina de estado ..................................................... 15-36 Directorio de objetos CANopen........................................................................................... 15-36 Perfiles de accionamiento CANopen................................................................................... 15-38
15.4 Protocolo de interfaz en serie universal - USS......................................................................... 15-41 Protocolo USS ..................................................................................................................... 15-41 Descripción del bus USS..................................................................................................... 15-42 Parametrización USS .......................................................................................................... 15-44 Transferencia de datos USS - estructura de los datos útiles .............................................. 15-47 Estructura de telegrama USS.............................................................................................. 15-48 Transferencia de datos USS - ejemplos de telegramas...................................................... 15-49 Transferencia de datos USS - máquina de estado ............................................................. 15-54 Transferencia de datos USS - tiempos de telegrama maestro ........................................... 15-55
15.5 DeviceNet ................................................................................................................................. 15-56 Protocolo DeviceNet............................................................................................................ 15-56 Descripción del bus DeviceNet............................................................................................ 15-57 Parametrización DeviceNet ................................................................................................. 15-58 Control de errores DeviceNet e indicación.......................................................................... 15-60 Estructura del telegrama DeviceNet.................................................................................... 15-61 Transferencia de datos DeviceNet - máquina de estado .................................................... 15-62 Clases de objetos DeviceNet .............................................................................................. 15-63
16 Eliminación y protección del medio ambiente 16-1
16.1 Eliminación ................................................................................................................................. 16-1 Productos............................................................................................................................... 16-1 Embalajes .............................................................................................................................. 16-1
16.2 Protección del medio ambiente .................................................................................................. 16-1 No se liberan materias peligrosas ......................................................................................... 16-1 Materiales contenidos............................................................................................................ 16-1 Reciclaje ................................................................................................................................ 16-2
17 Index 17-1
Rexroth IndraDrive FCS01.1 Introducción 1-1
DOK-INDRV*-FCS01******-IB01-ES-P
1 Introducción
1.1 Acerca de esta documentación
AVISO
¡Daños personales y materiales debidos a la configuración incorrecta de las aplicaciones, las máquinas y las instalaciones! ⇒ Se deben tener en cuenta los contenidos de las
documentaciones aplicables mencionadas.
La presente documentación sirve para:
• … la presentación de las documentaciones acerca del sistema de accionamiento Rexroth IndraDrive Fc
• … la selección de los componentes del sistema de accionamiento Rexroth IndraDrive Fc
Las presentes instrucciones de servicio contienen, entre otras cosas, indicaciones acerca de:
• montaje e instalación,
• datos técnicos de los componentes individuales (relevantes para el funcionamiento),
• datos sobre corriente, tensión y potencia,
• dimensiones y pesos, así como
• asignación de terminales.
La presente documentación contiene normas de seguridad, datos técnicos y normas de servicio acerca del sistema de accionamiento Rexroth IndraDrive Fc. Cada capítulo está dividido en las siguientes áreas temáticas:
Finalidad de la documentación
Contenido de la presente documentación
1-2 Introducción Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Capítulo Título Contenido
1 Introducción Información general
2 Indicaciones para la seguridad de accionamientos eléctricos y controles
3 Indicaciones importantes para el uso
Seguridad
4 Introducción
5 Entrega
6 Homologaciones y tipos
7 Montaje
8 Instalación
Descripción del producto
(para diseñadores y proyectistas)
9 Indicación y manejo de los módulos funcionales
10 Puesta en marcha
11 Parametrización
12 Mensajes de fallo
13 Datos técnicos
14 Información adicional
15 Comunicación principal: buses de campo y protocolos
Práctica (para el personal de operación y mantenimiento)
16 Eliminación y protección del medio ambiente Información general
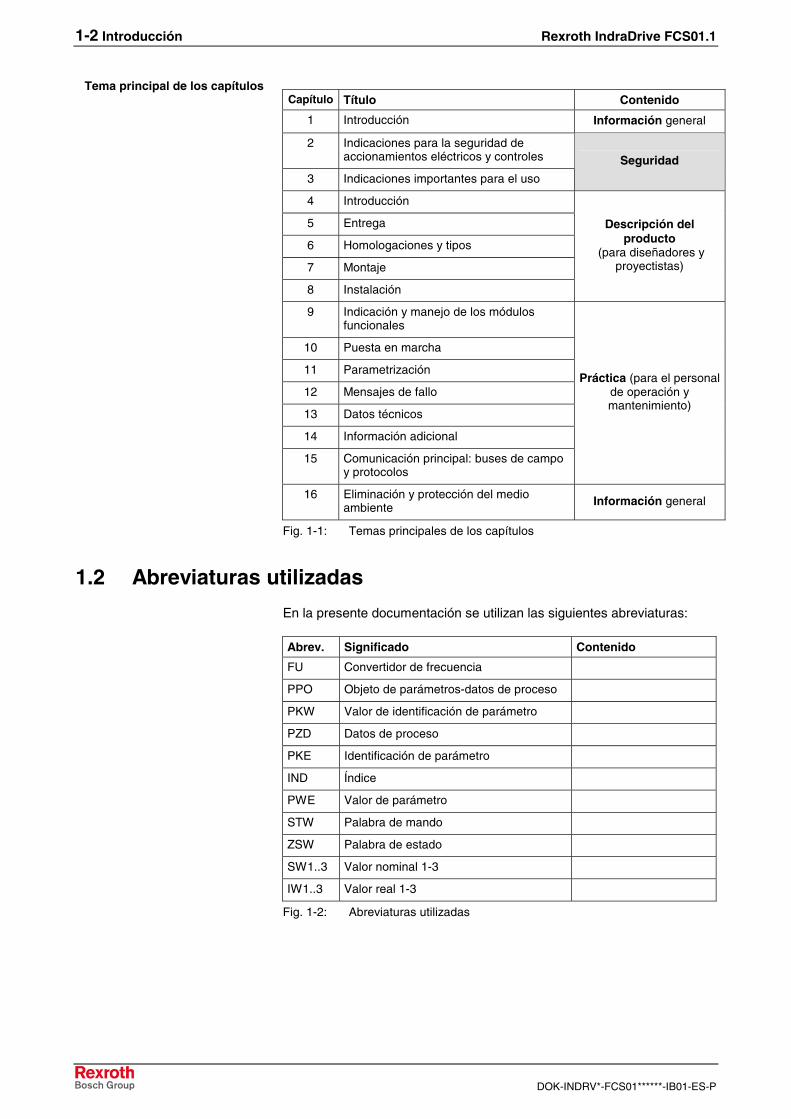
Fig. 1-1: Temas principales de los capítulos
1.2 Abreviaturas utilizadas
En la presente documentación se utilizan las siguientes abreviaturas:
Abrev. Significado Contenido
FU Convertidor de frecuencia
PPO Objeto de parámetros-datos de proceso
PKW Valor de identificación de parámetro
PZD Datos de proceso
PKE Identificación de parámetro
IND Índice
PWE Valor de parámetro
STW Palabra de mando
ZSW Palabra de estado
SW1..3 Valor nominal 1-3
IW1..3 Valor real 1-3
Fig. 1-2: Abreviaturas utilizadas
Tema principal de los capítulos
Rexroth IndraDrive FCS01.1 Introducción 1-3
DOK-INDRV*-FCS01******-IB01-ES-P
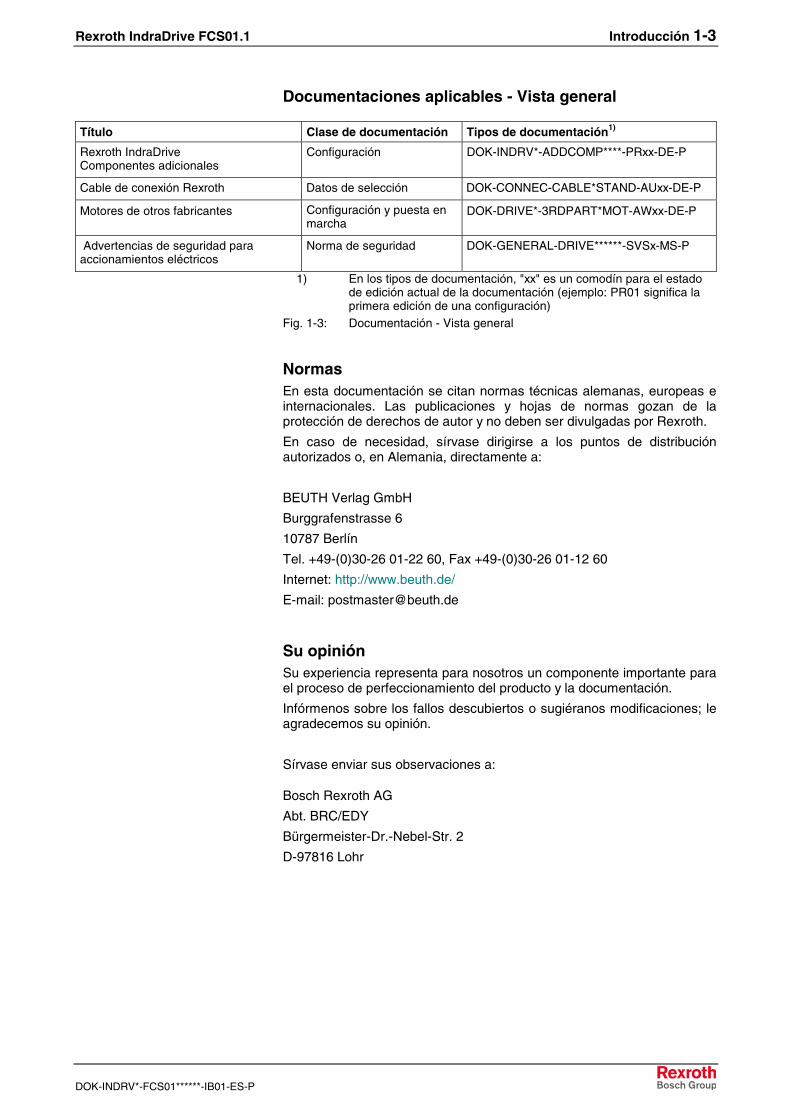
Documentaciones aplicables - Vista general
Título Clase de documentación Tipos de documentación1)
Rexroth IndraDrive Componentes adicionales
Configuración DOK-INDRV*-ADDCOMP****-PRxx-DE-P
Cable de conexión Rexroth Datos de selección DOK-CONNEC-CABLE*STAND-AUxx-DE-P
Motores de otros fabricantes Configuración y puesta en marcha
DOK-DRIVE*-3RDPART*MOT-AWxx-DE-P
Advertencias de seguridad para accionamientos eléctricos
Norma de seguridad DOK-GENERAL-DRIVE******-SVSx-MS-P
1) En los tipos de documentación, "xx" es un comodín para el estado de edición actual de la documentación (ejemplo: PR01 significa la primera edición de una configuración)
Fig. 1-3: Documentación - Vista general
Normas En esta documentación se citan normas técnicas alemanas, europeas e internacionales. Las publicaciones y hojas de normas gozan de la protección de derechos de autor y no deben ser divulgadas por Rexroth.
En caso de necesidad, sírvase dirigirse a los puntos de distribución autorizados o, en Alemania, directamente a:
BEUTH Verlag GmbH
Burggrafenstrasse 6
10787 Berlín
Tel. +49-(0)30-26 01-22 60, Fax +49-(0)30-26 01-12 60
Internet: http://www.beuth.de/
E-mail: [email protected]
Su opinión Su experiencia representa para nosotros un componente importante para el proceso de perfeccionamiento del producto y la documentación.
Infórmenos sobre los fallos descubiertos o sugiéranos modificaciones; le agradecemos su opinión.
Sírvase enviar sus observaciones a: Bosch Rexroth AG
Abt. BRC/EDY
Bürgermeister-Dr.-Nebel-Str. 2
D-97816 Lohr
1-4 Introducción Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
1.3 Presentación del sistema
El sistema de accionamiento Rexroth IndraDrive Fc consta de los componentes individuales (los elementos del sistema) necesarios según el uso y la aplicación:
• convertidor de frecuencia FCS01
• módulo funcional FCC01
• firmware FWA-INDRV*-FCB
• motor asíncrono estándar
• componentes adicionales transformador de red
• componentes adicionales filtro de red
• componentes adicionales inductancia de red
• componentes adicionales resistencia de frenado
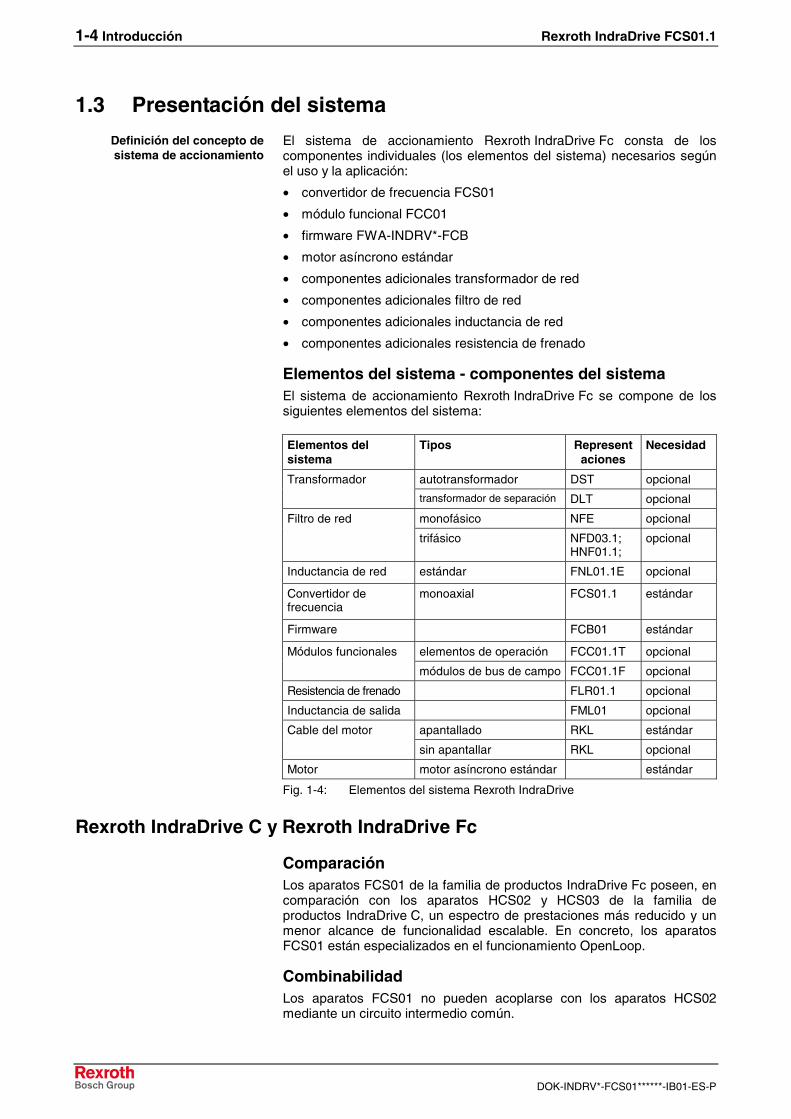
Elementos del sistema - componentes del sistema El sistema de accionamiento Rexroth IndraDrive Fc se compone de los siguientes elementos del sistema:
Elementos del sistema
Tipos Represent aciones
Necesidad
autotransformador DST opcional Transformador
transformador de separación DLT opcional
monofásico NFE opcional Filtro de red
trifásico NFD03.1; HNF01.1;
opcional
Inductancia de red estándar FNL01.1E opcional
Convertidor de frecuencia
monoaxial FCS01.1 estándar
Firmware FCB01 estándar
elementos de operación FCC01.1T opcional Módulos funcionales
módulos de bus de campo FCC01.1F opcional
Resistencia de frenado FLR01.1 opcional
Inductancia de salida FML01 opcional
apantallado RKL estándar Cable del motor
sin apantallar RKL opcional
Motor motor asíncrono estándar estándar
Fig. 1-4: Elementos del sistema Rexroth IndraDrive
Rexroth IndraDrive C y Rexroth IndraDrive Fc
Comparación Los aparatos FCS01 de la familia de productos IndraDrive Fc poseen, en comparación con los aparatos HCS02 y HCS03 de la familia de productos IndraDrive C, un espectro de prestaciones más reducido y un menor alcance de funcionalidad escalable. En concreto, los aparatos FCS01 están especializados en el funcionamiento OpenLoop.
Combinabilidad Los aparatos FCS01 no pueden acoplarse con los aparatos HCS02 mediante un circuito intermedio común.
Definición del concepto de sistema de accionamiento
Rexroth IndraDrive FCS01.1Advertencias de seguridad para accionamientos y controles eléctricos 2-1
DOK-INDRV*-FCS01******-IB01-ES-P
2 Advertencias de seguridad para accionamientos y controles eléctricos
2.1 Introducción
Antes de la puesta en servicio y de la manipulación de accionamientos y controles eléctricos.
Antes de la primera puesta en servicio de la instalación, se tienen que leer las siguientes indicaciones para la prevención de lesiones corporales y/o daños materiales. Estas indicaciones para la seguridad se tienen que cumplir en todo momento.
No trate de instalar o poner en servicio este equipo antes de haber leído atentamente toda la documentación suministrada. Estas instrucciones para la seguridad y todas las demás indicaciones para el usuario se tienen que leer antes de cada trabajo con este equipo. En caso de no disponer de indicaciones para el usuario para el equipo, póngase en contacto con su representante de distribución Rexroth competente. Pida el envío inmediato de dicha documentación a la o las personas responsables del funcionamiento seguro del equipo.
En caso de venta, préstamo y/u otro tipo de cesión a terceros del equipo, estas indicaciones para la seguridad se tienen que entregar igualmente.
AVISO
El manejo inadecuado de estos equipos y el incumplimiento de las advertencias aquí indicadas, así como las intervenciones inapropiadas en los dispositivos de seguridad pueden causar daños materiales, lesiones corporales, descargas eléctricas o, en casos extremos, incluso la muerte.
Condiciones para la manipulación de accionamientos y controles eléctricos y para su uso
• Bosch Rexroth AG no se hace responsable en caso de daños causados por la no observación de las advertencias contenidas en estas instrucciones de servicio.
• Antes de la puesta en servicio se tienen que leer las instrucciones de servicio, de mantenimiento y de seguridad. En caso de que no comprendiera perfectamente la documentación en el idioma disponible, consulte al fabricante e infórmele al respecto.
• El funcionamiento perfecto y seguro de este equipo presupone la ejecución correcta y adecuada de transporte, almacenamiento, montaje e instalación, así como el manejo y el mantenimiento cuidadosos.
• Para el manejo de instalaciones eléctricas se tiene que emplear personal formado y cualificado.
• Con este aparato o en su proximidad sólo deberá trabajar personal cualificado y formado en consecuencia. El personal se considera como cualificado si está lo suficientemente familiarizado con el montaje, la instalación y la operación del producto, así como con todos los avisos y medidas de precaución conforme a estas instrucciones de servicio.
2-2 Advertencias de seguridad para accionamientos y controles eléctricosRexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
• Asimismo, está formado, instruido o autorizado a conectar y desconectar circuitos eléctricos y aparatos según las normativas de la técnica de seguridad, establecer su puesta a tierra y proveer su identificación racional conforme a los requisitos del trabajo. Tiene que poseer un equipamiento de seguridad adecuado y estar instruido en Primeros Auxilios.
• Sólo se deben utilizar los accesorios y repuestos autorizados por el fabricante.
• Se tienen que observar las normativas y disposiciones de seguridad del país en el cual se utiliza el equipo.
• Los equipos están previstos para la instalación en máquinas de uso comercial e industrial.
• Se tienen que cumplir las condiciones ambientales indicadas en la documentación del producto.
• Sólo se permiten aplicaciones relevantes para la seguridad si ello se indica expresa y claramente en la documentación de diseño. Son relevantes para la seguridad todas aquellas aplicaciones que pudieran representar un riesgo de lesiones personales y daños materiales.
• Los datos sobre el uso de los componentes suministrados que figuran en la documentación del producto representan únicamente ejemplos de aplicación y propuestas.
El fabricante de la máquina y el constructor de la instalación están obligados, con respecto a su aplicación individual, a:
• comprobar por sí mismos la aptitud de los componentes suministrados y las indicaciones sobre su uso que figuran en la presente documentación,
• efectuar su adaptación a las prescripciones de seguridad y normas vigentes para su uso y ejecutar las medidas, modificaciones y complementos necesarios.
• la puesta en servicio del componente suministrado queda prohibida hasta que se haya constatado que la máquina o instalación en la cual se han instalado cumple las normativas nacionales, las reglas de seguridad y las normas para la aplicación.
• El funcionamiento sólo se permite en caso de cumplimiento de las normativas nacionales de la CEM para el caso de aplicación concreto.
El cumplimiento de los valores límite exigidos por las normativas nacionales es responsabilidad de los fabricantes de la instalación o máquina.
Los datos técnicos y las condiciones de conexión y de instalación figuran en la documentación del producto y se tienen que cumplir estrictamente.
Rexroth IndraDrive FCS01.1Advertencias de seguridad para accionamientos y controles eléctricos 2-3
DOK-INDRV*-FCS01******-IB01-ES-P
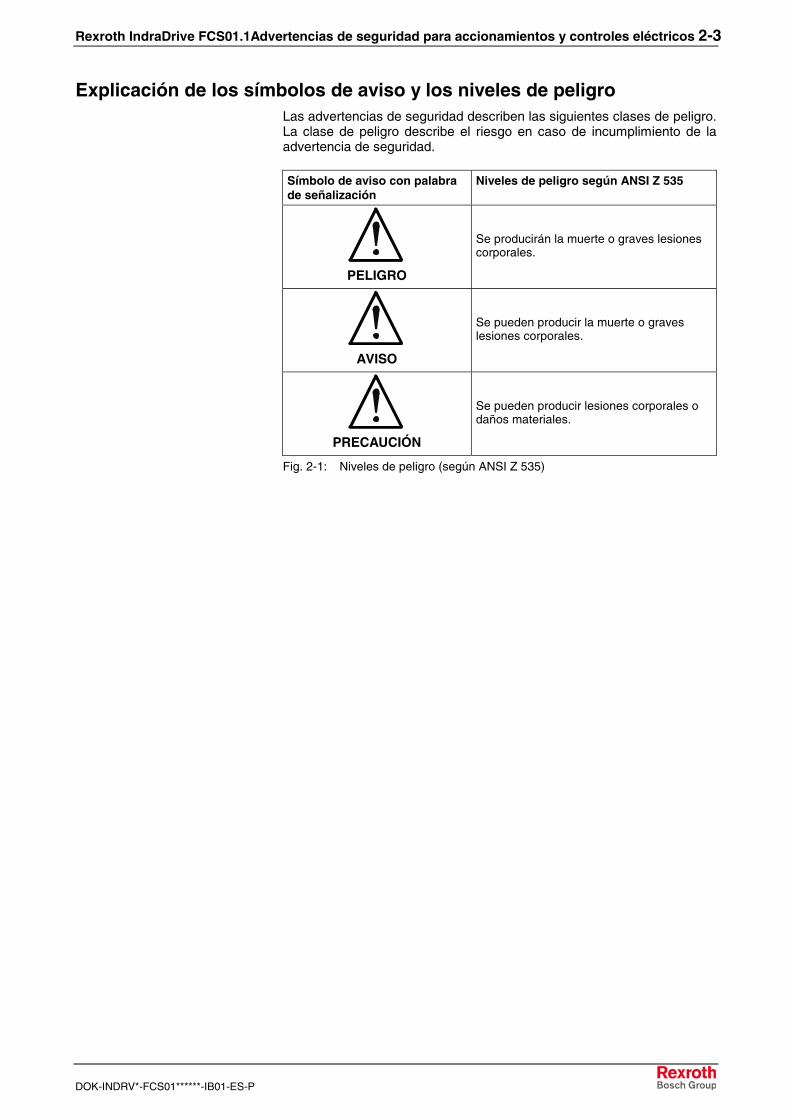
Explicación de los símbolos de aviso y los niveles de peligro Las advertencias de seguridad describen las siguientes clases de peligro. La clase de peligro describe el riesgo en caso de incumplimiento de la advertencia de seguridad.
Símbolo de aviso con palabra de señalización
Niveles de peligro según ANSI Z 535
PELIGRO
Se producirán la muerte o graves lesiones corporales.
AVISO
Se pueden producir la muerte o graves lesiones corporales.
PRECAUCIÓN
Se pueden producir lesiones corporales o daños materiales.
Fig. 2-1: Niveles de peligro (según ANSI Z 535)
2-4 Advertencias de seguridad para accionamientos y controles eléctricosRexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
2.2 Peligros en caso de uso incorrecto
PELIGRO
¡Alta tensión eléctrica y alta corriente de trabajo! ¡Peligro de muerte o graves lesiones corporales por descargas eléctricas!
PELIGRO
¡Movimientos peligrosos! ¡Peligro de muerte, graves lesiones corporales o daños materiales por movimientos accidentales de los motores!
AVISO
¡Alta tensión eléctrica en caso de conexión incorrecta! ¡Peligro de muerte o lesiones corporales por descargas eléctricas!
AVISO
¡Peligro para la salud de personas que lleven marcapasos, implantes metálicos y audífonos en la proximidad inmediata de equipos eléctricos!
PRECAUCIÓN
¡Posibilidad de superficies muy calientes en la carcasa del aparato! ¡Peligro de lesiones! ¡Peligro de quemaduras!
PRECAUCIÓN
¡Peligro de lesiones en caso de manejo inadecuado! ¡Lesiones corporales por aplastamiento, cizallamiento, corte, choques o manejo inadecuado de tuberías bajo presión!
PRECAUCIÓN
¡Peligro de lesiones en caso de manejo inadecuado de baterías!
Rexroth IndraDrive FCS01.1Advertencias de seguridad para accionamientos y controles eléctricos 2-5
DOK-INDRV*-FCS01******-IB01-ES-P
2.3 Protección contra el contacto con elementos eléctricos
Nota: Este apartado afecta únicamente a los equipos y componentes de accionamiento con tensiones superiores a 50 voltios.
El contacto con elementos con tensiones superiores a 50 voltios puede ser peligroso para las personas y causar electrocución. Durante el funcionamiento de aparatos eléctricos es inevitable que determinados elementos de dichos aparatos se encuentren bajo tensiones peligrosas.
PELIGRO
¡Alta tensión eléctrica! ¡Peligro de muerte, peligro de lesiones por descargas eléctricas y peligro de graves lesiones corporales! ⇒ El manejo, el mantenimiento y/o la reparación de
este aparato deben ser ejecutados únicamente por personal cualificado y formado para el trabajo en o con aparatos eléctricos.
⇒ Se tienen que observar las normas de construcción y de seguridad generales para el trabajo en instalaciones de alta intensidad.
⇒ Antes de conectar el equipo, la conexión fija del conductor de puesta a tierra se tiene que establecer en todos los aparatos eléctricos, conforme al esquema de conexiones.
⇒ El funcionamiento, incluso brevemente para fines de medición y prueba, sólo se permite con el conductor de puesta a tierra firmemente conectado en los puntos previstos al efecto en los componentes.
⇒ Antes de acceder a elementos eléctricos con tensiones superiores a 50 voltios, separar el aparato de la red o de la fuente de tensión. Asegurarlo contra la reconexión.
2-6 Advertencias de seguridad para accionamientos y controles eléctricosRexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
⇒ A observar en componentes eléctricos de accionamiento y de filtro:
Después de la desconexión, es necesario dejar transcurrir un tiempo de descarga de 30 minutos antes de acceder a los equipos. Medir la tensión de los condensadores antes de iniciar los trabajos para excluir peligros en caso de contacto.
⇒ Los puntos de conexión eléctricos de los componentes no se deben tocar en estado conectado.
⇒ Antes de la conexión, se tienen que montar, en los equipos, las cubiertas y los dispositivos de protección previstos para impedir el contacto. Antes de conectar elementos que conducen tensión, éstos se tienen que cubrir con seguridad y proteger para impedir el contacto.
⇒ ¡Para accionamientos eléctricos no se puede utilizar un dispositivo de protección de FI (dispositivo de protección de corriente de defecto) o RCD! La protección contra el contacto indirecto se tiene que establecer de otra manera, por ejemplo mediante un dispositivo de protección contra sobrecorrientes conforme a las normas relevantes.
⇒ En los equipos empotrados, la protección contra el contacto directo con elementos eléctricos se tiene que asegurar mediante una carcasa exterior, por ejemplo un armario de distribución.
Países europeos: según EN 50178/ 1998, apartado 5.3.2.3.
EE.UU.: Véanse las Normativas nacionales de Electricidad (NEC), La Asociación nacional de Fabricantes de Instalaciones eléctricas (NEMA), así como las normas de construcción regionales. El usuario tiene que cumplir en todo momento la totalidad de los puntos anteriormente citados.
A observar en componentes eléctricos de accionamiento y de filtro:
PELIGRO
¡Alta tensión en la carcasa y elevada corriente de fuga! ¡Peligro de muerte, peligro de lesiones por descargas eléctricas! ⇒ Antes de la conexión, se tiene que conectar el equipo
eléctrico y las carcasas de todos los equipos y motores eléctricos con el conductor de protección en los puntos de puesta a tierra o establecer su puesta a tierra. Esto se aplica también antes de ensayos de corta duración.
⇒ El conductor de protección del equipo eléctrico y de los aparatos se tiene que conectar siempre de forma fija y permanente a la red de suministro eléctrico. La corriente de fuga es superior a 3,5 mA.
⇒ ¡Para esta conexión de conductor de protección, se tiene que utilizar al menos una sección de cobre de 10 mm2 en todo su recorrido! Sin embargo, la sección de cobre no debe ser menor que la sección de la fase del cable de red.
⇒ Antes de la puesta en servicio, también para fines de ensayo, se tiene que conectar siempre el conductor de protección o establecer la unión con el conductor de puesta a tierra. De lo contrario, se pueden producir, en la carcasa, elevadas tensiones que causan descargas eléctricas.
Rexroth IndraDrive FCS01.1Advertencias de seguridad para accionamientos y controles eléctricos 2-7
DOK-INDRV*-FCS01******-IB01-ES-P
2.4 Protección contra descargas eléctricas con baja tensión de protección (PELV)
Todas las conexiones y bornes con tensiones de 5 a 50 voltios en productos Rexroth son bajas tensiones de protección, ejecutadas a prueba de contacto según las normas de producto.
AVISO
¡Alta tensión eléctrica en caso de conexión incorrecta! ¡Peligro de muerte, peligro de lesiones por descargas eléctricas! ⇒ A todas las conexiones y bornes con tensiones de 0
a 50 voltios se deben conectar únicamente equipos, componentes eléctricos y cables que muestren una baja tensión de protección (PELV = Protective Extra Low Voltage).
⇒ Sólo se deben conectar tensiones y circuitos que muestren una separación segura frente a tensiones peligrosas. Una separación segura se consigue, por ejemplo, mediante transformadores de separación, optoacopladores seguros o funcionamiento por batería sin red.
2.5 Protección contra movimientos peligrosos
Movimientos peligrosos pueden ser causados por la activación incorrecta de motores conectados. Las causas pueden ser de la índole más diversa:
• conexión o cableado poco limpio o deficiente
• errores en el manejo de los componentes
• introducción incorrecta de parámetros antes de la puesta en servicio
• errores en los captadores y transmisores de señales
• componentes defectuosos
• errores en el software
Estos fallos se pueden producir inmediatamente después de la conexión o al cabo de un tiempo de funcionamiento indeterminado.
Las vigilancias en los componentes de accionamiento excluyen en gran parte un funcionamiento erróneo en los accionamientos conectados. Con vistas a la protección de personas, particularmente el peligro de lesiones corporales y/o daños materiales, no se debe confiar únicamente en este hecho. Hasta la activación de las vigilancias incorporadas se tiene que prever, en todo caso, un movimiento erróneo del accionamiento cuya medida depende del tipo de control y del estado de funcionamiento.
2-8 Advertencias de seguridad para accionamientos y controles eléctricosRexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
PELIGRO
¡Movimientos peligrosos! ¡Peligro de muerte, peligro de lesiones, lesiones corporales graves o daños materiales! ⇒ Por las razones citadas, la protección de las
personas se tiene que asegurar mediante vigilancias o medidas dispuestas a nivel superior de la instalación. Éstas deben ser previstas por el usuario en función de las condiciones específicas de la instalación y en base a un análisis de peligros y errores. Para ello se deberán incluir las normativas de seguridad aplicables para la instalación. En caso de desconexión, anulación o falta de activación de dispositivos de seguridad se pueden producir movimientos incontrolados de la máquina u otras funciones erróneas.
Prevención de accidentes, lesiones y/o daños materiales
⇒ No se permite la estancia en la zona de movimientos de la máquina y sus componentes. Posibles medidas contra el acceso accidental de personas: - valla protectora
- reja protectora
- cubierta de protección
- barrera de luz
⇒ Resistencia suficiente de las vallas y cubiertas contra la máxima energía cinética posible.
⇒ Disponer los interruptores de parada de emergencia en un lugar fácilmente accesible en la proximidad inmediata. Comprobar el funcionamiento del dispositivo de parada de emergencia antes de la puesta en servicio. El equipo no se debe utilizar en caso de funcionamiento defectuoso del interruptor de parada de emergencia.
⇒ Protección contra el arranque accidental mediante desconexión de la conexión de potencia de los accionamientos a través del circuito de parada de emergencia o uso de un bloqueo de arranque seguro.
⇒ Antes de acceder o introducir las manos en la zona de peligro, los accionamientos se tienen que haber parado con seguridad.
⇒ Después de desconectar el motor, los ejes verticales se tienen que asegurar adicionalmente contra el descenso o la caída, por ejemplo mediante - bloqueo mecánico del eje vertical,
- dispositivo de frenado / retención / bloqueo externo o
- una suficiente compensación del peso del eje.
¡El freno de retención del motor suministrado de serie o un freno de retención externo, activado por el regulador de accionamientos, no es apto por sí solo para la protección de las personas!
Rexroth IndraDrive FCS01.1Advertencias de seguridad para accionamientos y controles eléctricos 2-9
DOK-INDRV*-FCS01******-IB01-ES-P
⇒ Mediante el interruptor principal, desconectar el equipamiento eléctrico de la tensión y asegurarlo contra la reconexión para la ejecución de: - trabajos de mantenimiento y reparaciones
- trabajos de limpieza
- interrupciones prolongadas del funcionamiento
⇒ Evitar el funcionamiento de aparatos de alta frecuencia, de control remoto y de radio en la proximidad del sistema electrónico del equipo y sus cables de alimentación. Si el uso de tales aparatos fuera inevitable, comprobar el sistema y la instalación antes de la primera puesta en servicio con respecto a eventuales funciones erróneas en todas las situaciones de uso. En caso de necesidad, se tiene que efectuar una prueba de CEM especial en la instalación.
2.6 Protección contra campos magnéticos y electromagnéticos en el funcionamiento y montaje
Los campos magnéticos y electromagnéticos en la proximidad inmediata de conductores bajo corriente e imanes permanentes de motor pueden representar un peligro serio para personas que lleven marcapasos, implantes metálicos y audífonos.
AVISO
¡Peligro para la salud de personas que lleven marcapasos, implantes metálicos y audífonos en la proximidad inmediata de equipos eléctricos! ⇒ Las personas que lleven marcapasos e implantes
metálicos tienen prohibido el acceso a las siguientes zonas: - zonas donde se montan, utilizan o ponen en
servicio aparatos y componentes eléctricos.
- zonas donde se almacenan, reparan o montan componentes de motor con imanes permanentes
⇒ Si existiera la necesidad de que personas portadoras de marcapasos accedan a estas zonas, la correspondiente decisión debe ser tomada previamente por un médico. La resistencia a interferencias de marcapasos ya implantados o a implantar en el futuro puede variar considerablemente, por lo cual no existen reglas de aplicación general.
⇒ Las personas con implantes metálicos o fragmentos de metal, así como los portadores de audífonos deberán consultar a un médico antes de acceder a dichas zonas, dado que se deberán prever perjuicios para la salud.
2-10 Advertencias de seguridad para accionamientos y controles eléctricosRexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
2.7 Protección contra el contacto con elementos calientes
PRECAUCIÓN
¡Posibilidad de superficies muy calientes en la carcasa del aparato! ¡Peligro de lesiones! ¡Peligro de quemaduras! ⇒ ¡No tocar la superficie de la carcasa en las
proximidades de fuentes de calor calientes! ¡Peligro de quemaduras!
⇒ Antes de tocar los aparatos después de su desconexión, se tienen que dejar enfriar durante 10 minutos.
⇒ ¡En caso de tocar elementos del equipamiento como carcasas de aparatos en las que se alojan disipadores de calor y resistencias, se pueden sufrir quemaduras!
2.8 Protección en el manejo y el montaje
En condiciones desfavorables, el manejo y montaje inadecuado de determinados elementos y componentes puede causar lesiones.
PRECAUCIÓN
¡Peligro de lesiones en caso de manejo inadecuado! ¡Lesiones corporales por aplastamiento, cizallamiento, corte, choques! ⇒ Se tienen que observar las normas de construcción
y de seguridad generales para el manejo y el montaje.
⇒ Utilizar dispositivos de montaje y de transporte adecuados.
⇒ Prevenir lesiones por aprisionamiento y aplastamiento tomando las medidas oportunas.
⇒ Utilizar únicamente herramientas adecuadas. Si está prescrito su uso, utilizar herramientas especiales.
⇒ Utilizar correctamente los dispositivos de elevación y las herramientas.
⇒ En caso de necesidad, utilizar equipos de protección apropiados (p. ej., gafas protectoras, calzado de seguridad, guantes de protección).
⇒ No permanecer debajo de cargas suspendidas.
⇒ Por causa del peligro de resbalamiento, recoger inmediatamente los derrames de líquido en el suelo.
Rexroth IndraDrive FCS01.1Advertencias de seguridad para accionamientos y controles eléctricos 2-11
DOK-INDRV*-FCS01******-IB01-ES-P
2.9 Seguridad en el manejo de pilas
Las pilas están compuestas de sustancias químicas activas, alojadas en una carcasa sólida. Por esta razón, su manejo inadecuado puede causar lesiones o daños materiales.
PRECAUCIÓN
¡Peligro de lesiones en caso de manejo inadecuado! ⇒ No tratar de reactivar pilas descargadas mediante su
calentamiento u otros métodos (peligro de explosión y cauterización).
⇒ No se permite recargar pilas porque se pueden derramar o explotar.
⇒ No tirar las pilas al fuego.
⇒ No desmontar las pilas.
⇒ No dañar los componentes eléctricos incorporados en los equipos.
Nota: Protección del medio ambiente y eliminación En el sentido de las normativas legales, las pilas contenidas en el producto se tienen que considerar como materias peligrosas en el transporte terrestre, aéreo y marítimo (peligro de explosión). Las pilas usadas se tienen que eliminar separadas de los demás residuos. Observar las normativas nacionales en el país de instalación.
2-12 Advertencias de seguridad para accionamientos y controles eléctricosRexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
2.10 Protección contra conductos bajo presión
Determinados motores (ADS, ADM, 1MB, etc.) y reguladores de accionamientos pueden ser alimentados, conforme a las indicaciones contenidas en la documentación de proyecto, en parte con medios bajo presión suministrados desde el exterior, tales como aire comprimido, aceite hidráulico, líquido refrigerante y lubricante refrigerador. En estos casos, el manejo inadecuado de sistemas de alimentación externos, líneas de suministro o conexiones puede causar lesiones o daños materiales.
PRECAUCIÓN
¡Peligro de lesiones en caso de manejo inadecuado de conductos bajo presión! ⇒ No tratar de separar, abrir o cortar conductos que se
encuentren bajo presión (peligro de explosión) ⇒ Observar las normas de funcionamiento de los
correspondientes fabricantes. ⇒ Antes de desmontar conductos, evacuar la presión y
el medio. ⇒ Utilizar equipos de protección apropiados (p. ej.,
gafas protectoras, calzado de seguridad, guantes de protección).
⇒ Recoger inmediatamente los derrames de líquido en el suelo.
Nota: Protección del medio ambiente y eliminación Los medios utilizados para el funcionamiento del producto pueden ser contaminantes. Los medios contaminantes se tienen que eliminar separados de los demás residuos. Observar las normativas nacionales en el país de instalación.
Rexroth IndraDrive FCS01.1 Indicaciones importantes para el uso 3-1
DOK-INDRV*-FCS01******-IB01-ES-P
3 Indicaciones importantes para el uso
3.1 Uso correcto
Introducción Los productos Rexroth son desarrollados y fabricados conforme al estado actual de la técnica. Antes de su entrega son comprobados en cuanto a su seguridad de funcionamiento.
Los productos sólo se deben utilizar conforme a lo prescrito. En caso de uso no correcto, se pueden producir situaciones que causen daños materiales y personales.
Nota: En caso de daños causados por el uso no correcto de los productos, Rexroth como fabricante no prestará ningún tipo de garantía, responsabilidad o indemnización; en caso de uso no correcto de los productos, los riesgos corresponden únicamente al usuario.
Antes de utilizar los productos de Rexroth, se tienen que cumplir los siguientes requisitos para garantizar el uso correcto de los productos:
• Todas las personas que manejen de alguna forma alguno de nuestros productos, tienen que leer y comprender las correspondientes normas de seguridad y las indicaciones sobre el uso correcto.
• Si los productos son hardware, se tienen que dejar en su estado original; es decir, que no se permite realizar modificaciones constructivas en ellos. No se permite descompilar los productos de software ni modificar sus códigos fuente.
• No se permite la instalación o puesta en servicio de productos defectuosos o que muestren errores.
• Tiene que estar garantizado que los productos estén instalados conforme a las prescripciones indicadas en la documentación.
3-2 Indicaciones importantes para el uso Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Ámbitos de uso y aplicación Los reguladores de accionamiento de Rexroth están diseñados para la regulación de motores eléctricos y el control de su funcionamiento.
Para la regulación y vigilancia del motor puede ser necesario conectar sensores y actores adicionales.
Nota: Los reguladores de accionamiento sólo se deben utilizar con los accesorios y piezas de montaje descritos en esta documentación. Los componentes que no se citen expresamente no deben ser montados ni conectados. Lo mismo se aplica con respecto a los cables y conductos.
El funcionamiento sólo se permite en las configuraciones y combinaciones de componentes expresamente indicadas y con el software y firmware indicado y especificado en la descripción de funciones en cuestión.
Cada regulador de accionamiento se tiene que programar antes de su puesta en servicio para que el motor ejecute las funciones específicas para la aplicación.
Los reguladores de accionamiento han sido desarrollados para su utilización en tareas de accionamiento y control de uno o varios ejes.
Para el uso de los reguladores de accionamiento en aplicaciones específicas, se dispone de tipos de aparato con distintas potencias de accionamiento y distintas interfaces.
Los ámbitos de aplicación típicos de los reguladores de accionamiento son:
• Sistemas de manejo y montaje,
• Máquinas embaladoras y de productos alimentarios,
• Máquinas de impresión y transformación de papel y
• Máquinas herramienta.
El regulador de accionamiento sólo se debe utilizar en las condiciones de montaje e instalación descritas en esta documentación, en la posición de uso indicada y en las condiciones ambientales citadas (temperatura, modo de protección, humedad, CEM, etc.).
3.2 Uso no correcto
La utilización de los reguladores de accionamiento fuera de las condiciones de servicio descritas y los datos técnicos y especificaciones indicados en la documentación se considera "no correcto“.
Los reguladores de accionamiento no se deben utilizar si:
• ... se exponen a condiciones de servicio que no corresponden a las condiciones ambientales prescritas. queda prohibido, por ejemplo, el funcionamiento sumergido bajo agua, con variaciones de temperatura extremas o temperaturas máximas extremas.
• Además, los reguladores de accionamiento no pueden utilizarse en aplicaciones para las que Rexroth no haya indicado expresamente su autorización. ¡Para ello observe estrictamente las prescripciones contenidas en las indicaciones generales de seguridad!
Rexroth IndraDrive FCS01.1 Introducción 4-1
DOK-INDRV*-FCS01******-IB01-ES-P
4 Introducción
4.1 Generalidades
Los aparatos FCS01 de la familia de productos IndraDrive Fc se caracterizan por su alto grado de modularidad, ofreciendo al mismo tiempo unas propiedades de regulación óptimas.
Los aparatos FCS01 cuentan con una regulación del vector de corriente sin sensor, que en combinación con el modelo de motor de un motor asíncrono trifásico garantiza siempre una proporción óptima de tensión/frecuencia. Para el accionamiento, esto significa: pares de arranque y de sobrecarga máximos con una velocidad de giro constante.
Mediante los módulos funcionales modulares resulta posible adaptar esta serie de aparatos a las necesidades individuales.
Gracias a las múltiples posibilidades de ajuste, se pueden utilizar todos los motores de corriente trifásica.
Este manual se basa en el firmware de aparato FCS01 FWA-INDRV*-FCB-01V**; la versión (01V) y el estado Release (**) pueden comprobarse en el parámetro P707. Si el convertidor de frecuencia que utiliza corresponde a otra versión, ello puede dar lugar a divergencias. En tal caso, descargue de la página de Internet http://www.boschrexroth.com/indradrive el software del aparato más actualizado.
4.2 Propiedades FCS01
Propiedades del equipo básico FCS01: • 0 a 50°C
• Grado de protección IP20 (para la instalación en un armario de distribución)
• Posibilidad de montaje adyacente, sin distancia adicional
• Margen de potencia de 0,25 kW a 7,5 kW (1/3~ 230V de 0,25 kW a 2,2kW, 3~ 400V de 0,55 kW a 7,5kW)
• Tensiones de conexión a la red 230 V y 400 V, monofásica y trifásica;
• Filtro de red CEM integrado para curva límite A según la norma EN55011
• Par de arranque elevado y regulación precisa de la velocidad de giro del motor
• Capacidad de sobrecarga de hasta el 200% durante 3,5 s y del 150% durante 60 s
• Frecuencia de salida 0 – 0,400Hz
• Frecuencias de impulso ajustables de 3,0 a16 kHz
• Chopper de frenado integrado para funcionamiento de 4 cuadrantes (resistencia de frenado conectable externamente)
• Materiales exentos de amianto y de silicona
Modos de funcionamiento • Funcionamiento U / f
• Regulación de vector de corriente sin sensor (en adelante denominada regulación ISD)
4-2 Introducción Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Funciones • Identificación automática de parámetros del motor
• Cuatro bloques de parámetros separados, conmutables online
• Regulador PID y de proceso
• 32 frecuencias fijas
• Potenciómetro del motor
• Registro de señales
• Frenado por inyección de corriente continua programable
• Redondeo de rampa
• Arranque con rotación previa del motor
• …
Interfaces • RS 232 / RS 485
• 5 entradas digitales
• 2 entradas analógicas (también utilizables como entrada digital)
• 1 salida analógica
• 2 relés 230V CA / 30V CC, 2A
Tipos de refrigeración (dependientes del tamaño constructivo) • Refrigeración natural
• Refrigeración forzada, controlada por la temperatura
Rexroth IndraDrive FCS01.1 Entrega 5-1
DOK-INDRV*-FCS01******-IB01-ES-P
5 Entrega Examine el aparato inmediatamente después de la recepción y desembalaje para comprobar si presenta daños de transporte, deformaciones o piezas sueltas.
En caso de constatar daños, póngase en contacto urgentemente con el transportista y lleve a cabo una toma de inventario exhaustiva.
Nota: Se debe aplicar el mismo procedimiento aunque el embalaje no esté dañado.
5.1 Volumen de suministro
• convertidor de frecuencia FCS01 en grado de protección IP20
• firmware FCB
• chopper de frenado integrado
• filtro de red CEM integrado para curva límite A según la norma EN55011
• cubierta de la ranura de conexión del módulo funcional
• abrazadera protectora para bornes de control
• cubierta para los bornes de control
• instrucciones de servicio
• resistencia de frenado FLR01, para aplicaciones con energía de realimentación;
• interruptor de temperatura FAS01 para el montaje en resistencias de frenado FLR01;
• componente adicional FAS02 para la conexión del blindaje del cable del motor a la carcasa del convertidor de frecuencia;
• software DriveTop Fc para la parametrización y la puesta en servicio
• accesorios adicionales sobre demanda
• FCC01.1T-STD-NNNN, elemento de operación estándar, elemento de operación extraíble, indicación LED de 4 dígitos y 7 segmentos
• FCC01.1T-CMF-NNNN, elemento de operación de confort, elemento de operación extraíble, indicación LCD de 4 líneas de texto claro
• FCC01.1F-PB1-NNNN, módulo Profibus DP, 1,5 Mbaudios, módulo funcional para la comunicación Profibus
• FCC01.1F-PB2-NNNN, módulo Profibus DP, 12 Mbaudios, módulo funcional para la comunicación Profibus
• FCC01.1F-CN1-NNNN, módulo CANopen, módulo funcional para la conexión de bus CANopen
• FCC01.1F-DN1-NNNN, módulo DeviceNet, módulo funcional para la conexión de bus DeviceNet
Versión estándar
Accesorios suministrables :
Módulos funcionales

5-2 Entrega Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Rexroth IndraDrive FCS01.1 Homologaciones y tipos 6-1
DOK-INDRV*-FCS01******-IB01-ES-P
6 Homologaciones y tipos
6.1 Homologaciones
Puede consultar el estado actual de las homologaciones en la dirección de Internet http://www.boschrexroth.com/indradrive .
Conformidad CE Para los convertidores de frecuencia FCS01 se confirma la conformidad con arreglo a la Directiva de baja tensión .
Fig. 6-1: Marca CE
Véase el capítulo 13.4 Compatibilidad electromagnética (CEM)
Homologaciones UL y cUL La inclusión de los convertidores de frecuencia FCS01 en la lista está en preparación.
(Utilización en Norteamérica)
Fig. 6-2: Homologaciones UL y cUL
Apropiado para la utilización conectada a la red con una corriente de cortocircuito máxima de 5.000 A (simétrica), 200-240V ó 380-480V (trifásica) y con protección mediante un "fusible de clase J", tal como se
Los convertidores de frecuencia FCS01 de la familia de productos IndraDrive Fc incorporan una protección contra sobrecarga del motor. Hallará detalles técnicos adicionales en el capítulo 13.3 Datos eléctricos para la homologación UL/cUL.
Directiva de baja tensión
Directiva CEM
6-2 Homologaciones y tipos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
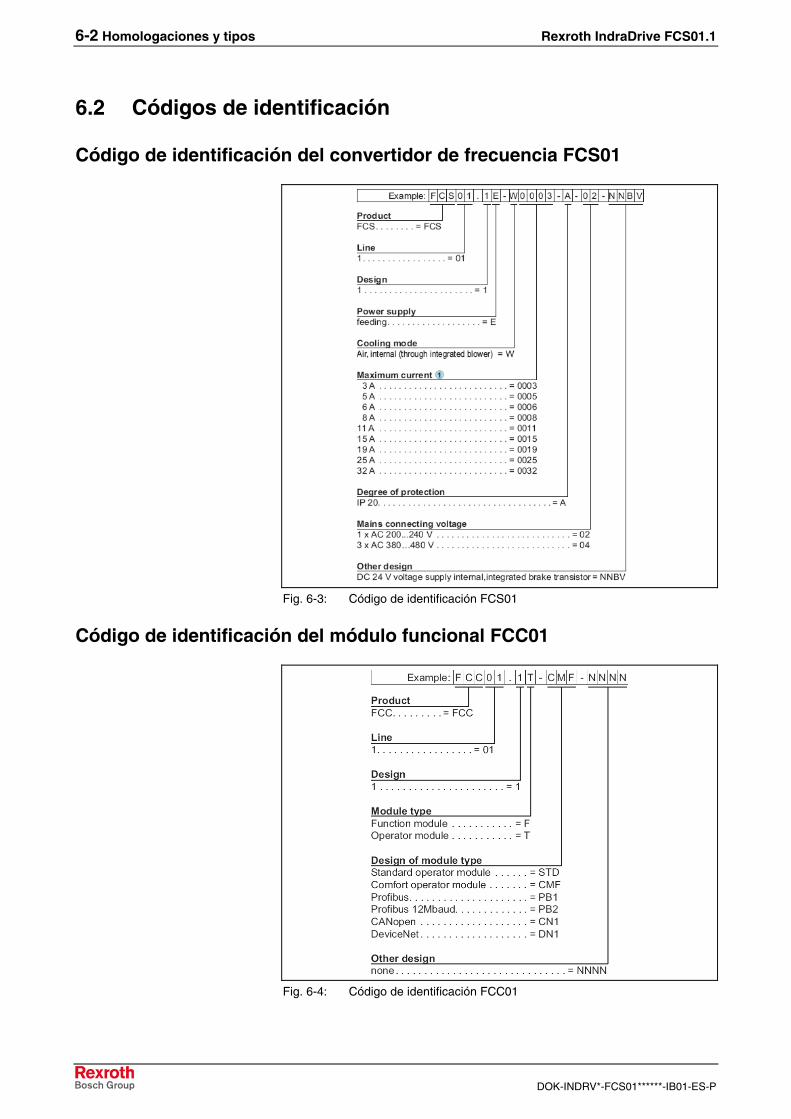
6.2 Códigos de identificación
Código de identificación del convertidor de frecuencia FCS01
Fig. 6-3: Código de identificación FCS01
Código de identificación del módulo funcional FCC01
Fig. 6-4: Código de identificación FCC01
Rexroth IndraDrive FCS01.1 Homologaciones y tipos 6-3
DOK-INDRV*-FCS01******-IB01-ES-P
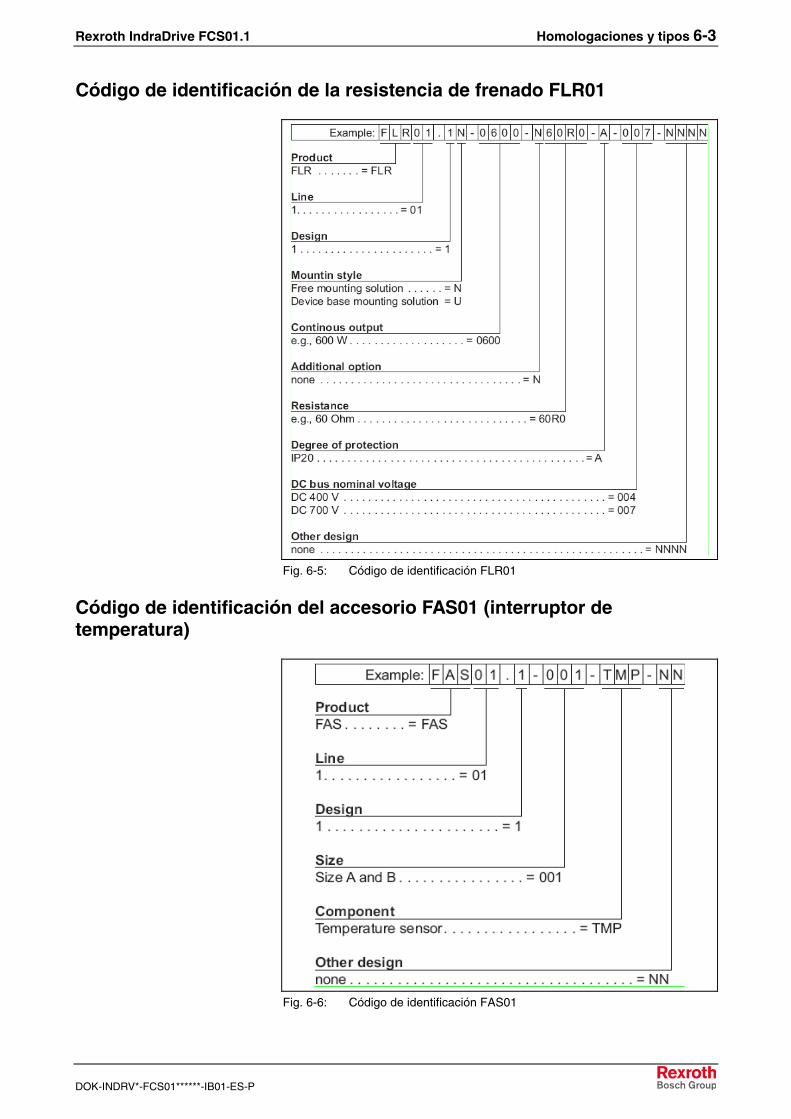
Código de identificación de la resistencia de frenado FLR01
Fig. 6-5: Código de identificación FLR01
Código de identificación del accesorio FAS01 (interruptor de temperatura)
Fig. 6-6: Código de identificación FAS01
6-4 Homologaciones y tipos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
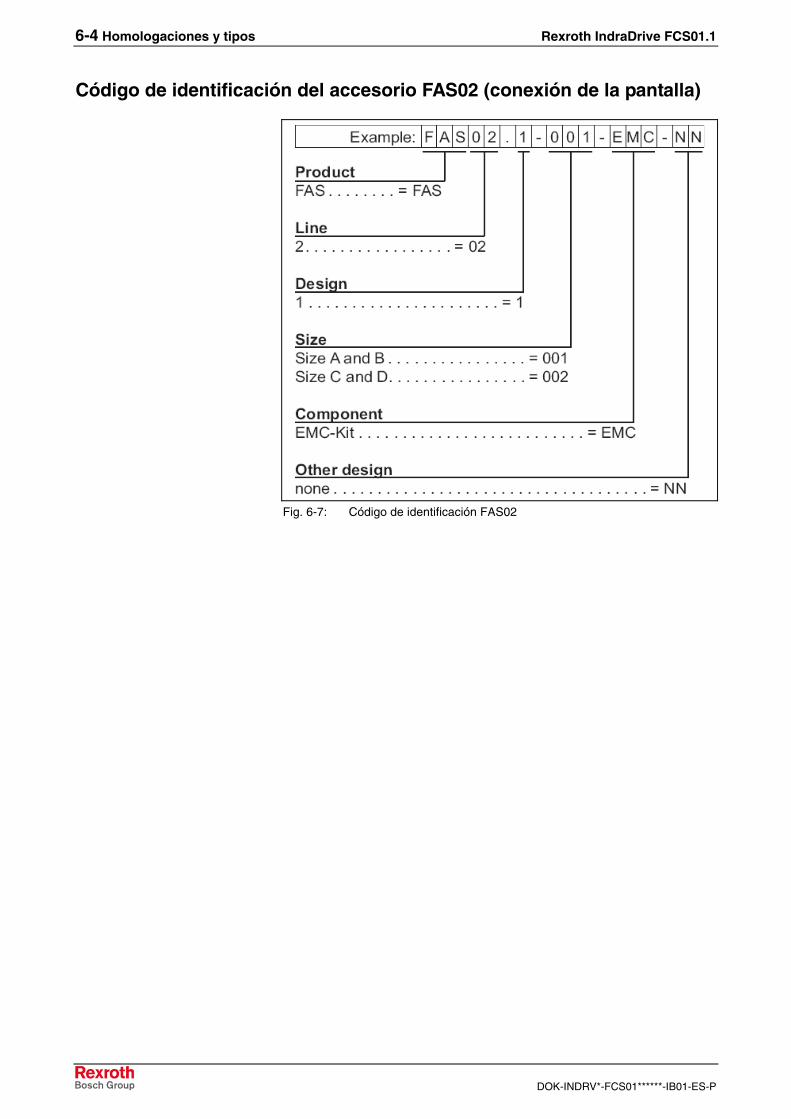
Código de identificación del accesorio FAS02 (conexión de la pantalla)
Fig. 6-7: Código de identificación FAS02
Rexroth IndraDrive FCS01.1 Homologaciones y tipos 6-5
DOK-INDRV*-FCS01******-IB01-ES-P
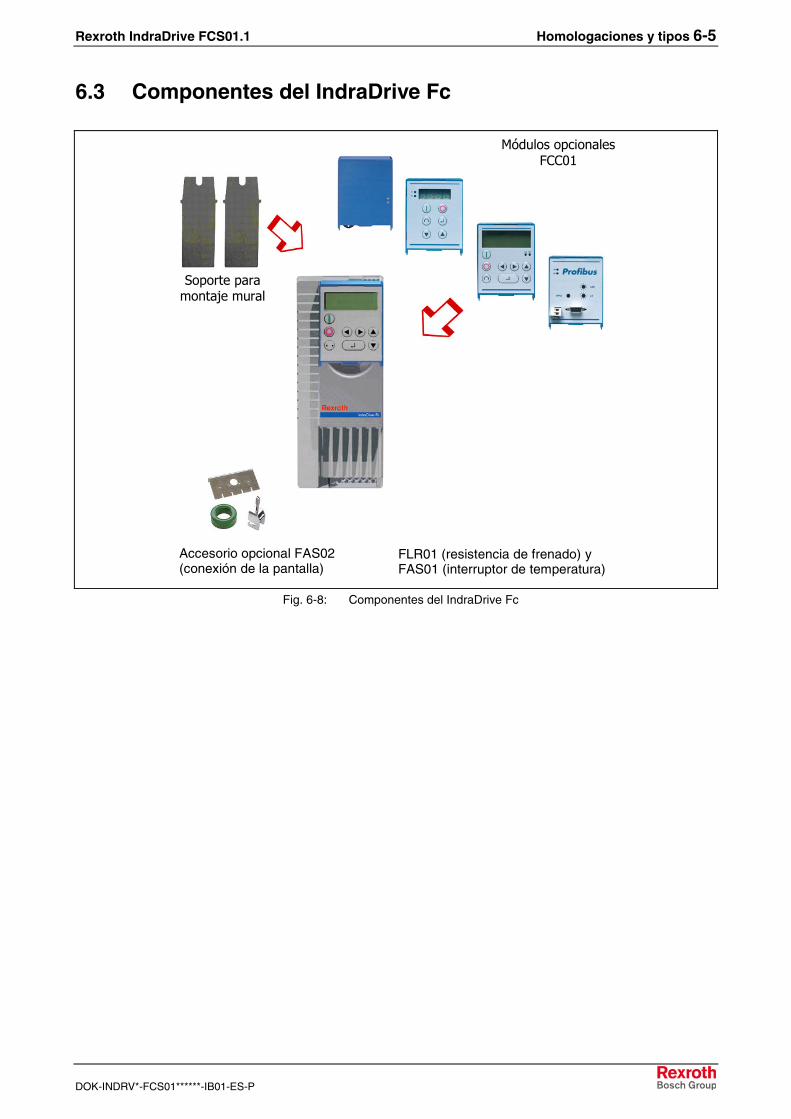
6.3 Componentes del IndraDrive Fc
Módulos opcionales FCC01
Soporte para montaje mural
Accesorio opcional FAS02 (conexión de la pantalla)
FLR01 (resistencia de frenado) y FAS01 (interruptor de temperatura)
Fig. 6-8: Componentes del IndraDrive Fc

6-6 Homologaciones y tipos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Rexroth IndraDrive FCS01.1 Montaje 7-1
DOK-INDRV*-FCS01******-IB01-ES-P
7 Montaje
7.1 Montaje
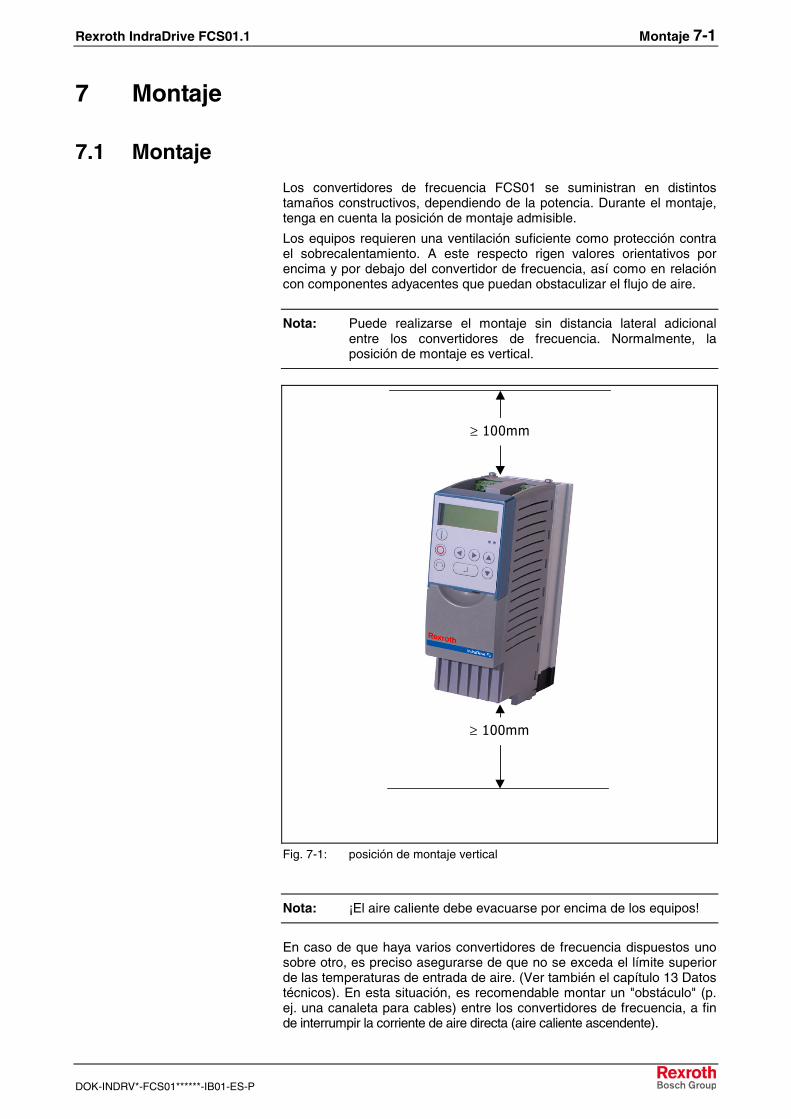
Los convertidores de frecuencia FCS01 se suministran en distintos tamaños constructivos, dependiendo de la potencia. Durante el montaje, tenga en cuenta la posición de montaje admisible.
Los equipos requieren una ventilación suficiente como protección contra el sobrecalentamiento. A este respecto rigen valores orientativos por encima y por debajo del convertidor de frecuencia, así como en relación con componentes adyacentes que puedan obstaculizar el flujo de aire.
Nota: Puede realizarse el montaje sin distancia lateral adicional entre los convertidores de frecuencia. Normalmente, la posición de montaje es vertical.
≥ 100mm
≥ 100mm
Fig. 7-1: posición de montaje vertical
Nota: ¡El aire caliente debe evacuarse por encima de los equipos!
En caso de que haya varios convertidores de frecuencia dispuestos uno sobre otro, es preciso asegurarse de que no se exceda el límite superior de las temperaturas de entrada de aire. (Ver también el capítulo 13 Datos técnicos). En esta situación, es recomendable montar un "obstáculo" (p. ej. una canaleta para cables) entre los convertidores de frecuencia, a fin de interrumpir la corriente de aire directa (aire caliente ascendente).
7-2 Montaje Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Eficiencia: En caso de montaje en un armario de distribución, se debe procurar una ventilación suficiente. Las pérdidas térmicas durante el funcionamiento se sitúan alrededor del 5% (en función del tamaño del aparato y del equipamiento) de la potencia nominal del convertidor de frecuencia.
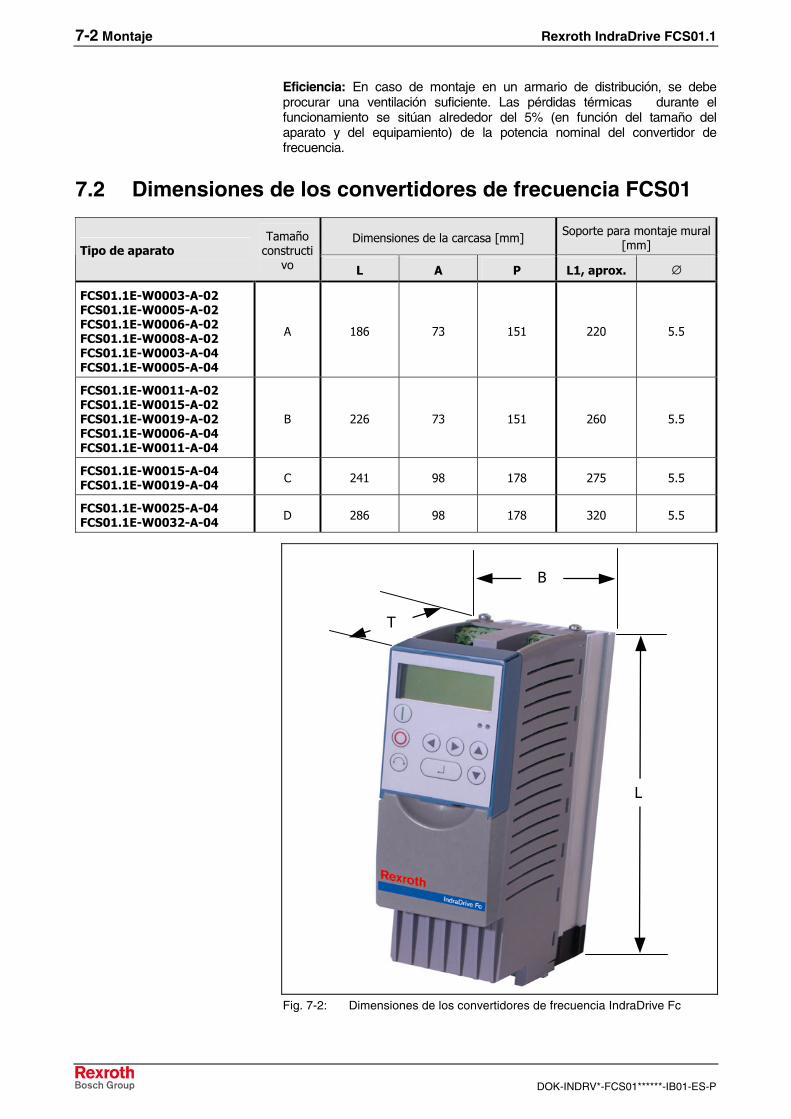
7.2 Dimensiones de los convertidores de frecuencia FCS01
Dimensiones de la carcasa [mm] Soporte para montaje mural [mm] Tipo de aparato
Tamaño constructi
vo L A P L1, aprox. ∅
FCS01.1E-W0003-A-02 FCS01.1E-W0005-A-02 FCS01.1E-W0006-A-02 FCS01.1E-W0008-A-02 FCS01.1E-W0003-A-04 FCS01.1E-W0005-A-04
A 186 73 151 220 5.5
FCS01.1E-W0011-A-02 FCS01.1E-W0015-A-02 FCS01.1E-W0019-A-02 FCS01.1E-W0006-A-04 FCS01.1E-W0011-A-04
B 226 73 151 260 5.5
FCS01.1E-W0015-A-04 FCS01.1E-W0019-A-04 C 241 98 178 275 5.5
FCS01.1E-W0025-A-04 FCS01.1E-W0032-A-04 D 286 98 178 320 5.5
B
L
T
Fig. 7-2: Dimensiones de los convertidores de frecuencia IndraDrive Fc
Rexroth IndraDrive FCS01.1 Instalación 8-1
DOK-INDRV*-FCS01******-IB01-ES-P
8 Instalación
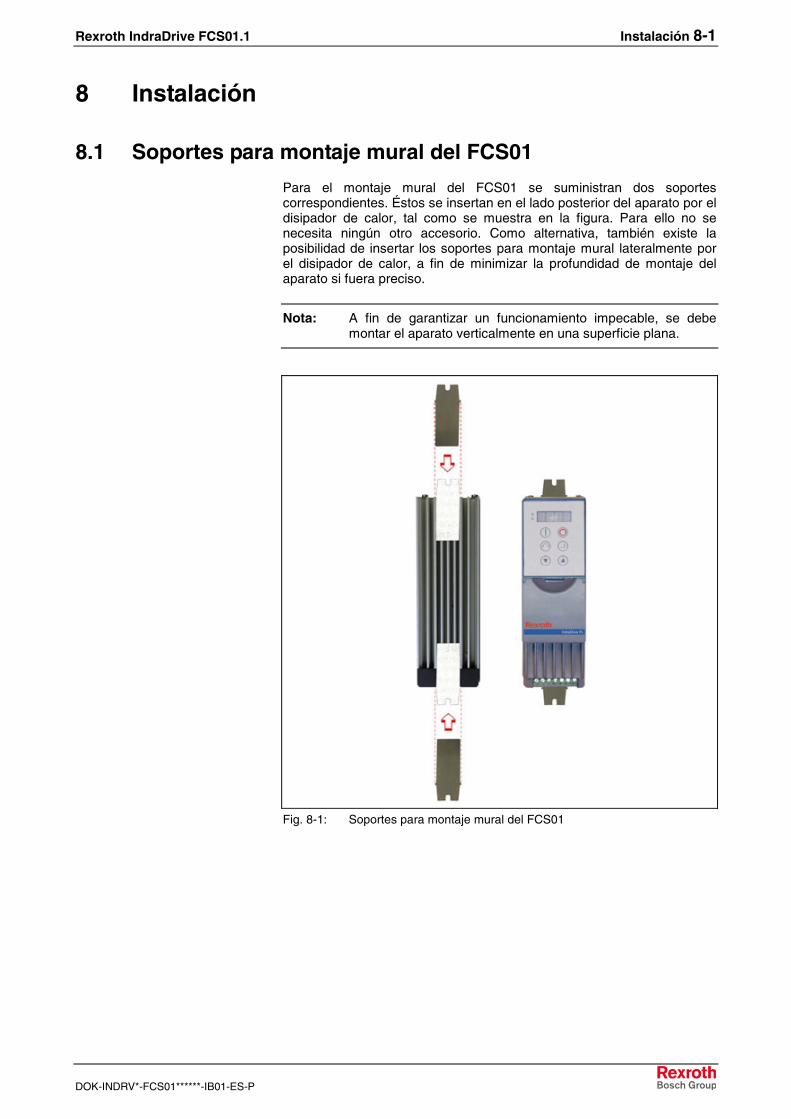
8.1 Soportes para montaje mural del FCS01
Para el montaje mural del FCS01 se suministran dos soportes correspondientes. Éstos se insertan en el lado posterior del aparato por el disipador de calor, tal como se muestra en la figura. Para ello no se necesita ningún otro accesorio. Como alternativa, también existe la posibilidad de insertar los soportes para montaje mural lateralmente por el disipador de calor, a fin de minimizar la profundidad de montaje del aparato si fuera preciso.
Nota: A fin de garantizar un funcionamiento impecable, se debe montar el aparato verticalmente en una superficie plana.
Fig. 8-1: Soportes para montaje mural del FCS01
8-2 Instalación Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
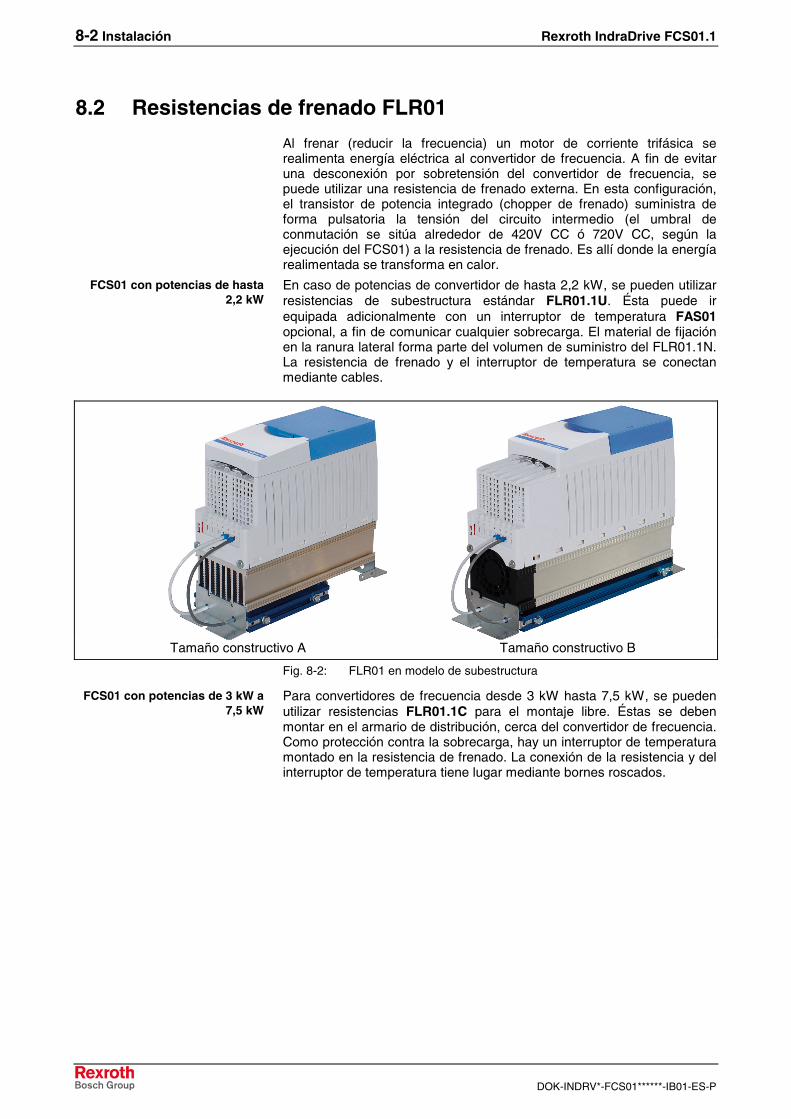
8.2 Resistencias de frenado FLR01
Al frenar (reducir la frecuencia) un motor de corriente trifásica se realimenta energía eléctrica al convertidor de frecuencia. A fin de evitar una desconexión por sobretensión del convertidor de frecuencia, se puede utilizar una resistencia de frenado externa. En esta configuración, el transistor de potencia integrado (chopper de frenado) suministra de forma pulsatoria la tensión del circuito intermedio (el umbral de conmutación se sitúa alrededor de 420V CC ó 720V CC, según la ejecución del FCS01) a la resistencia de frenado. Es allí donde la energía realimentada se transforma en calor.
En caso de potencias de convertidor de hasta 2,2 kW, se pueden utilizar resistencias de subestructura estándar FLR01.1U. Ésta puede ir equipada adicionalmente con un interruptor de temperatura FAS01 opcional, a fin de comunicar cualquier sobrecarga. El material de fijación en la ranura lateral forma parte del volumen de suministro del FLR01.1N. La resistencia de frenado y el interruptor de temperatura se conectan mediante cables.
Tamaño constructivo A Tamaño constructivo B
Fig. 8-2: FLR01 en modelo de subestructura
Para convertidores de frecuencia desde 3 kW hasta 7,5 kW, se pueden utilizar resistencias FLR01.1C para el montaje libre. Éstas se deben montar en el armario de distribución, cerca del convertidor de frecuencia. Como protección contra la sobrecarga, hay un interruptor de temperatura montado en la resistencia de frenado. La conexión de la resistencia y del interruptor de temperatura tiene lugar mediante bornes roscados.
FCS01 con potencias de hasta 2,2 kW
FCS01 con potencias de 3 kW a 7,5 kW

Rexroth IndraDrive FCS01.1 Instalación 8-3
DOK-INDRV*-FCS01******-IB01-ES-P
Tamaño constructivo C Tamaño constructivo D
Fig. 8-3: FLR01 en modelo de montaje libre
Combinaciones admisibles de resistencias de frenado con tipo de convertidor
Resistencia de frenado Convertidor
FLR01.1U-0100-N240R-A-004-NNNN FCS01.1E-W0003-A-02-NNBV FCS01.1E-W0005-A-02-NNBV
FLR01.1U-0100-N150R-A-004-NNNN FCS01.1E-W0006-A-02-NNBV FCS01.1E-W0008-A-02-NNBV
FLR01.1U-0200-N75R0-A-004-NNNN FCS01.1E-W0011-A-02-NNBV FCS01.1E-W0019-A-02-NNBV
FLR01.1U-0100-N400R-A-007-NNNN FCS01.1E-W0003-A-04-NNBV FCS01.1E-W0005-A-04-NNBV
FLR01.1U-0200-N220R-A-007-NNNN FCS01.1E-W0006-A-04-NNBV FCS01.1E-W0011-A-04-NNBV
FLR01.1N-0400-N100R-A-007-NNNN FCS01.1E-W0015-A-04-NNBV FCS01.1E-W0019-A-04-NNBV
FLR01.1N-0600-N60R0-A-007-NNNN FCS01.1E-W0025-A-04-NNBV FCS01.1E-W0032-A-04-NNBV
Fig. 8-4: Tabla de asignación FLR01 a FCS01
8-4 Instalación Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
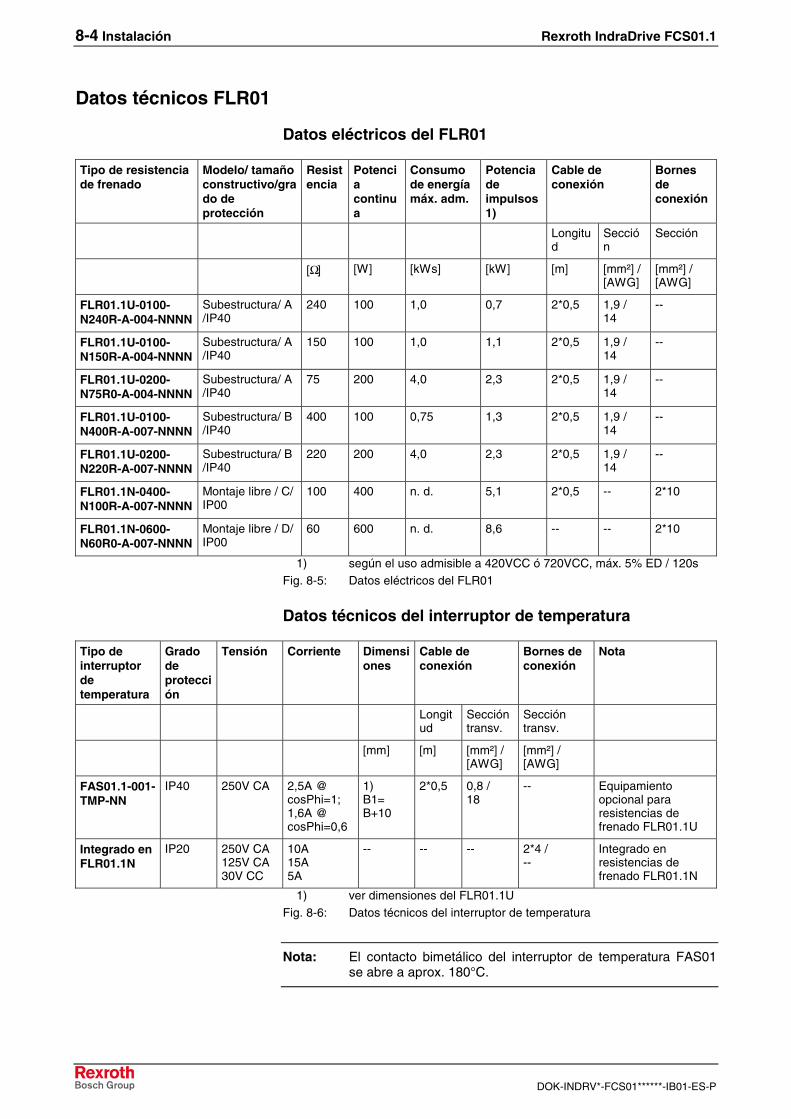
Datos técnicos FLR01
Datos eléctricos del FLR01
Tipo de resistencia de frenado
Modelo/ tamaño constructivo/grado de protección
Resistencia
Potencia continua
Consumo de energía máx. adm.
Potencia de impulsos 1)
Cable de conexión
Bornes de conexión
Longitud
Sección
Sección
[Ω] [W] [kWs] [kW] [m] [mm²] / [AWG]
[mm²] / [AWG]
FLR01.1U-0100-N240R-A-004-NNNN
Subestructura/ A /IP40
240 100 1,0 0,7 2*0,5 1,9 / 14
--
FLR01.1U-0100-N150R-A-004-NNNN
Subestructura/ A /IP40
150 100 1,0 1,1 2*0,5 1,9 / 14
--
FLR01.1U-0200-N75R0-A-004-NNNN
Subestructura/ A /IP40
75 200 4,0 2,3 2*0,5 1,9 / 14
--
FLR01.1U-0100-N400R-A-007-NNNN
Subestructura/ B /IP40
400 100 0,75 1,3 2*0,5 1,9 / 14
--
FLR01.1U-0200-N220R-A-007-NNNN
Subestructura/ B /IP40
220 200 4,0 2,3 2*0,5 1,9 / 14
--
FLR01.1N-0400-N100R-A-007-NNNN
Montaje libre / C/ IP00
100 400 n. d. 5,1 2*0,5 -- 2*10
FLR01.1N-0600-N60R0-A-007-NNNN
Montaje libre / D/ IP00
60 600 n. d. 8,6 -- -- 2*10
1) según el uso admisible a 420VCC ó 720VCC, máx. 5% ED / 120s Fig. 8-5: Datos eléctricos del FLR01
Datos técnicos del interruptor de temperatura
Tipo de interruptor de temperatura
Grado de protección
Tensión Corriente Dimensiones
Cable de conexión
Bornes de conexión
Nota
Longitud
Sección transv.
Sección transv.
[mm] [m] [mm²] / [AWG]
[mm²] / [AWG]
FAS01.1-001-TMP-NN
IP40 250V CA 2,5A @ cosPhi=1; 1,6A @ cosPhi=0,6
1) B1= B+10
2*0,5 0,8 / 18
-- Equipamiento opcional para resistencias de frenado FLR01.1U
Integrado en FLR01.1N
IP20 250V CA 125V CA 30V CC
10A 15A 5A
-- -- -- 2*4 / --
Integrado en resistencias de frenado FLR01.1N
1) ver dimensiones del FLR01.1U Fig. 8-6: Datos técnicos del interruptor de temperatura
Nota: El contacto bimetálico del interruptor de temperatura FAS01 se abre a aprox. 180°C.
Rexroth IndraDrive FCS01.1 Instalación 8-5
DOK-INDRV*-FCS01******-IB01-ES-P
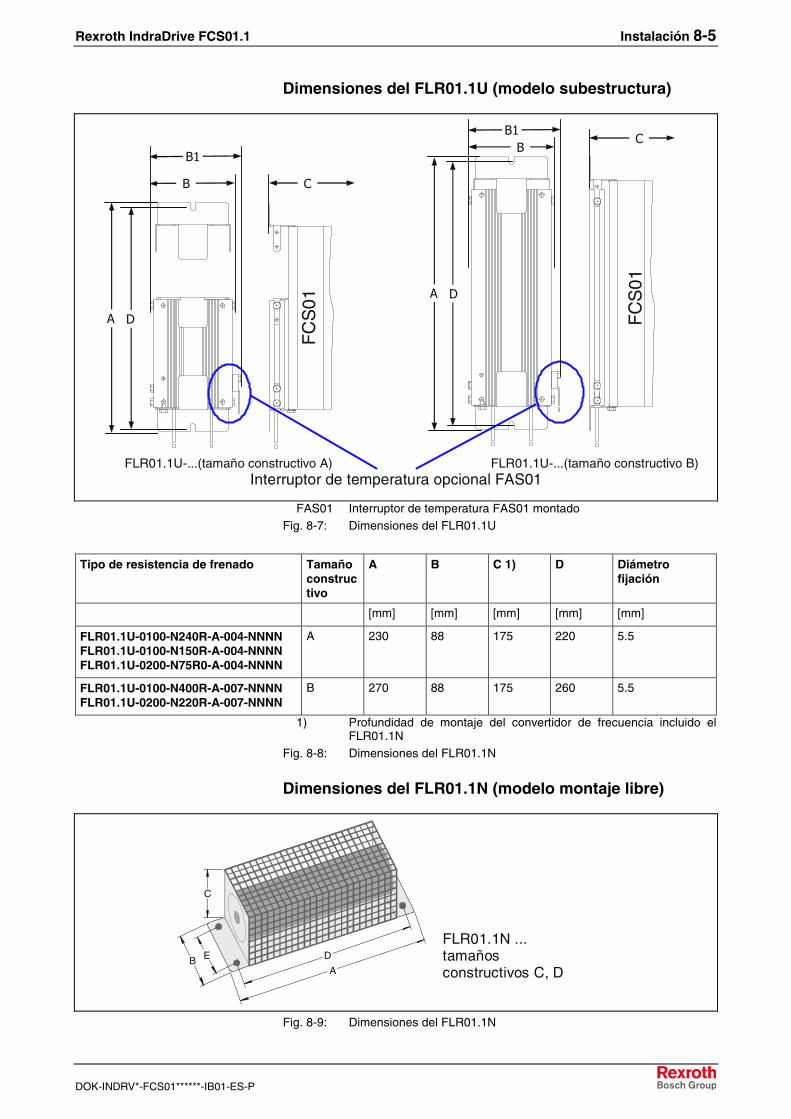
Dimensiones del FLR01.1U (modelo subestructura)
FLR01.1U-...(tamaño constructivo A) FLR01.1U-...(tamaño constructivo B)
Interruptor de temperatura opcional FAS01
B
A
C
D
B
A
C
DF
CS
01
FC
S01
B1
B1
FAS01 Interruptor de temperatura FAS01 montado
Fig. 8-7: Dimensiones del FLR01.1U
Tipo de resistencia de frenado Tamaño constructivo
A B C 1) D Diámetro fijación
[mm] [mm] [mm] [mm] [mm]
FLR01.1U-0100-N240R-A-004-NNNN FLR01.1U-0100-N150R-A-004-NNNN FLR01.1U-0200-N75R0-A-004-NNNN
A 230 88 175 220 5.5
FLR01.1U-0100-N400R-A-007-NNNN FLR01.1U-0200-N220R-A-007-NNNN
B 270 88 175 260 5.5
1) Profundidad de montaje del convertidor de frecuencia incluido el FLR01.1N
Fig. 8-8: Dimensiones del FLR01.1N
Dimensiones del FLR01.1N (modelo montaje libre)
FLR01.1N ... tamaños constructivos C, D
BA
E D
C
Fig. 8-9: Dimensiones del FLR01.1N
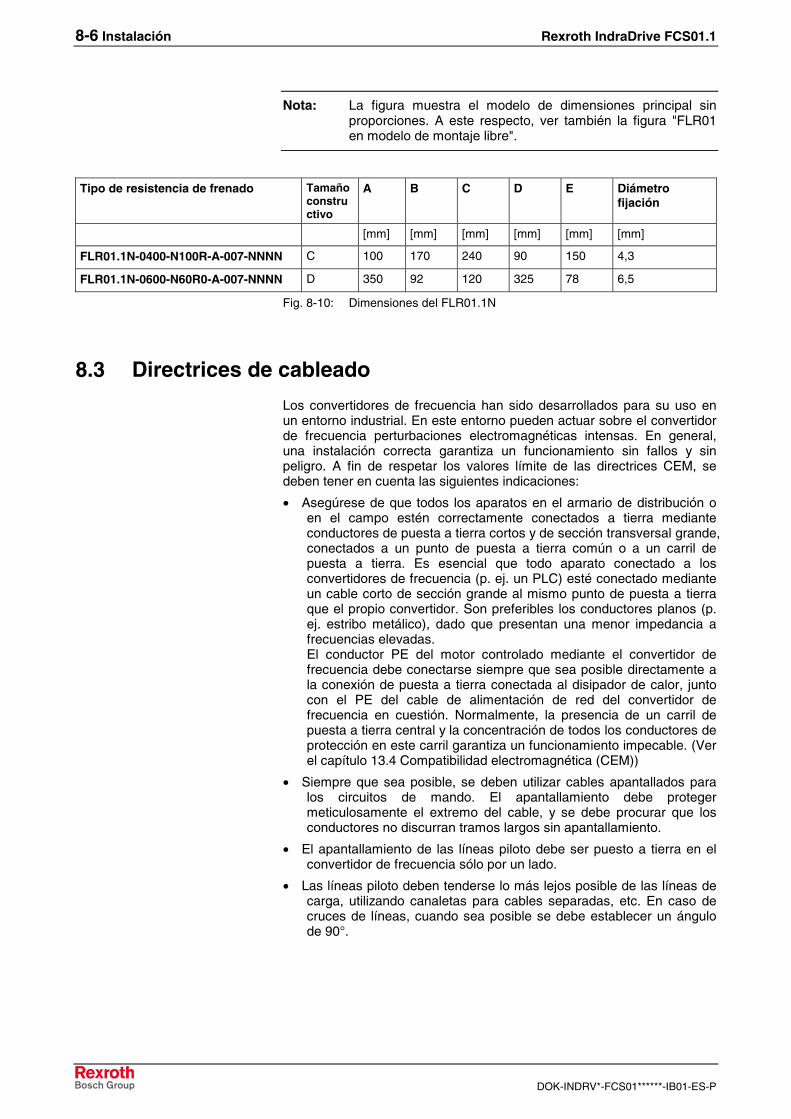
8-6 Instalación Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Nota: La figura muestra el modelo de dimensiones principal sin proporciones. A este respecto, ver también la figura "FLR01 en modelo de montaje libre".
Tipo de resistencia de frenado Tamaño constructivo
A B C D E Diámetro fijación
[mm] [mm] [mm] [mm] [mm] [mm]
FLR01.1N-0400-N100R-A-007-NNNN C 100 170 240 90 150 4,3
FLR01.1N-0600-N60R0-A-007-NNNN D 350 92 120 325 78 6,5
Fig. 8-10: Dimensiones del FLR01.1N
8.3 Directrices de cableado
Los convertidores de frecuencia han sido desarrollados para su uso en un entorno industrial. En este entorno pueden actuar sobre el convertidor de frecuencia perturbaciones electromagnéticas intensas. En general, una instalación correcta garantiza un funcionamiento sin fallos y sin peligro. A fin de respetar los valores límite de las directrices CEM, se deben tener en cuenta las siguientes indicaciones:
• Asegúrese de que todos los aparatos en el armario de distribución o en el campo estén correctamente conectados a tierra mediante conductores de puesta a tierra cortos y de sección transversal grande, conectados a un punto de puesta a tierra común o a un carril de puesta a tierra. Es esencial que todo aparato conectado a los convertidores de frecuencia (p. ej. un PLC) esté conectado mediante un cable corto de sección grande al mismo punto de puesta a tierra que el propio convertidor. Son preferibles los conductores planos (p. ej. estribo metálico), dado que presentan una menor impedancia a frecuencias elevadas. El conductor PE del motor controlado mediante el convertidor de frecuencia debe conectarse siempre que sea posible directamente a la conexión de puesta a tierra conectada al disipador de calor, junto con el PE del cable de alimentación de red del convertidor de frecuencia en cuestión. Normalmente, la presencia de un carril de puesta a tierra central y la concentración de todos los conductores de protección en este carril garantiza un funcionamiento impecable. (Ver el capítulo 13.4 Compatibilidad electromagnética (CEM))
• Siempre que sea posible, se deben utilizar cables apantallados para los circuitos de mando. El apantallamiento debe proteger meticulosamente el extremo del cable, y se debe procurar que los conductores no discurran tramos largos sin apantallamiento.
• El apantallamiento de las líneas piloto debe ser puesto a tierra en el convertidor de frecuencia sólo por un lado.
• Las líneas piloto deben tenderse lo más lejos posible de las líneas de carga, utilizando canaletas para cables separadas, etc. En caso de cruces de líneas, cuando sea posible se debe establecer un ángulo de 90°.
Rexroth IndraDrive FCS01.1 Instalación 8-7
DOK-INDRV*-FCS01******-IB01-ES-P
• Cerciórese de que los contactores en los armarios estén protegidos contra interferencias, ya sea mediante conexión RC en caso de contactores de tensión alterna o mediante diodos de "marcha libre" en caso de contactores de corriente continua; los dispositivos de supresión de interferencias se deben aplicar en las bobinas del contactor. También son eficaces los varistores para la limitación de la sobretensión. Esta supresión de interferencias es especialmente importante si los contactores son controlados por los relés alojados en el convertidor.
• Para las conexiones de carga (cables del motor) se deben utilizar cables apantallados o reforzados, y el apantallado/refuerzo debe ponerse a tierra en ambos extremos. La puesta a tierra debe realizarse directamente en la placa de montaje del armario de conexión, con buenas propiedades de conducción, o en el ángulo de apantallado del kit CEM.
• En caso de que el accionamiento deba funcionar en un entorno sensible a las perturbaciones electromagnéticas, se recomienda el uso de filtros de supresión de interferencias (teniendo en cuenta el grado de protección), a fin de limitar las perturbaciones del convertidor de frecuencia, tanto las asociadas al cable como a las irradiadas. En este caso, es preciso montar el filtro lo más cerca posible del convertidor y ponerlo a tierra correctamente.
• Además, es imprescindible que el cableado garantice la CEM. (Ver el capítulo 13.3 Datos eléctricos para la homologación UL/cUL y el capítulo 13.4 Compatibilidad electromagnética (CEM)).
• Se debe seleccionar la frecuencia de conmutación más baja posible. De este modo se reduce la intensidad de las perturbaciones electromagnéticas generadas por el convertidor.
Nota: ¡Durante la instalación de los convertidores de frecuencia no se deben vulnerar bajo ningún concepto las normas de seguridad!
Nota: Las líneas piloto, los cables de alimentación de red y los cables del motor deben tenderse por separado. Bajo ningún concepto deben tenderse en el mismo tubo de protección o canal de instalación. No se debe utilizar el equipo de prueba para aislamientos de alta tensión para cables conectados al convertidor de frecuencia.
Cableado y apantallamiento en módulos funcionales En ausencia de medidas de CEM, las perturbaciones de alta frecuencia, esencialmente provocadas por procesos de conmutación o por rayos, suelen dar lugar a perturbaciones en los componentes electrónicos de los usuarios del bus, de modo que ya no está garantizado un funcionamiento libre de perturbaciones.
Un apantallamiento correcto del cable de bus amortigua las interferencias eléctricas que pueden aparecer en un entorno industrial. Para alcanzar las propiedades de apantallamiento óptimas, se deben aplicar las siguientes medidas:
• Conecte los usuarios del bus siguiendo el recorrido más corto.
• El apantallamiento del cable de bus debe realizarse por ambos lados y cubriendo una superficie extensa.
• Evite conectar al bus cables de derivación alrededor de aparatos de campo.
• Evite alargar los cables de bus mediante conectores.
8-8 Instalación Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Nota: En caso de potenciales de tierra distintos, a través del apantallamiento conectado por ambos lados puede fluir una corriente de compensación que puede representar un peligro para componentes electrónicos. Se deben reducir las diferencias de potencial, por medio de una conexión equipotencial suficiente.
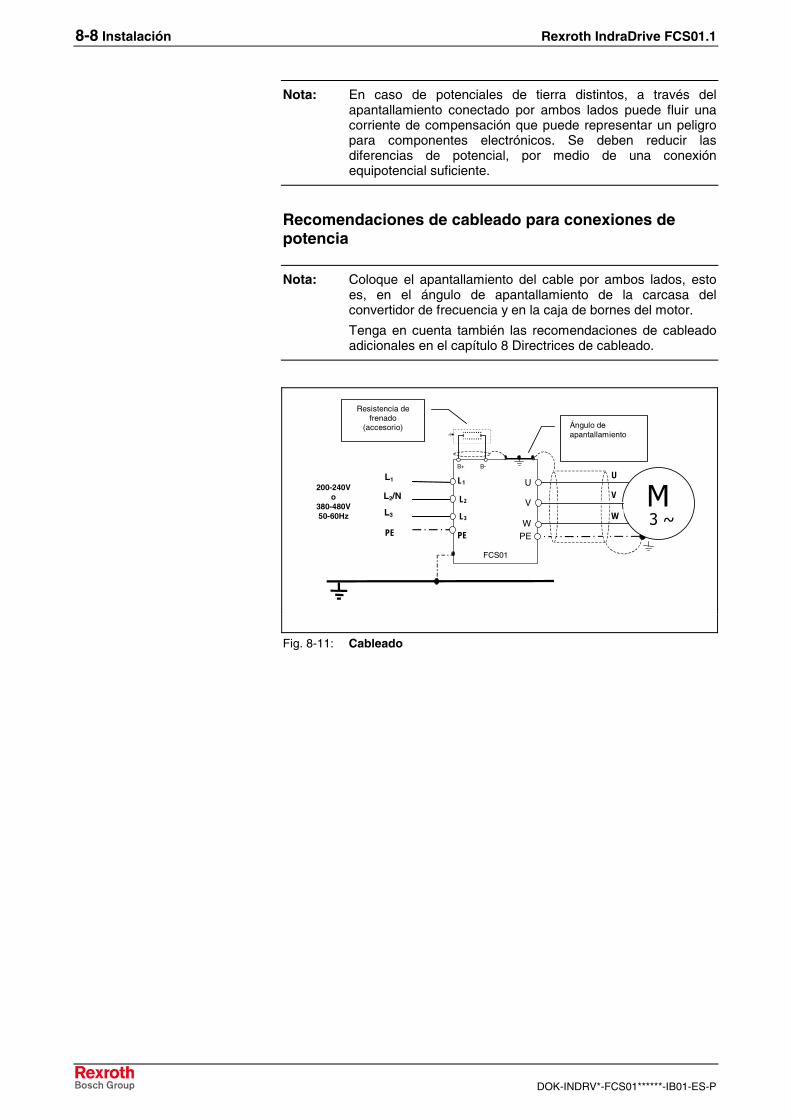
Recomendaciones de cableado para conexiones de potencia
Nota: Coloque el apantallamiento del cable por ambos lados, esto es, en el ángulo de apantallamiento de la carcasa del convertidor de frecuencia y en la caja de bornes del motor.
Tenga en cuenta también las recomendaciones de cableado adicionales en el capítulo 8 Directrices de cableado.
M3 ~
PE
L1
W
V
U
W
V
U200-240V o
380-480V 50-60Hz
L1
L2
PE
L2/N
L3 L3
PE
B- B+
FCS01
Ángulo de apantallamiento
Resistencia de frenado
(accesorio)
Fig. 8-11: Cableado
Rexroth IndraDrive FCS01.1 Instalación 8-9
DOK-INDRV*-FCS01******-IB01-ES-P
8.4 Conexión de potencia eléctrica
AVISO
ESTOS APARATOS DEBEN ESTAR PUESTOS A TIERRA. ⇒ Para que el aparato funcione de forma segura, debe
haber sido montado y puesto en servicio por personal cualificado, conforme a las prescripciones y observando las indicaciones contenidas en este manual. En especial, se deben observar tanto las prescripciones de montaje y seguridad generales y regionales para trabajos en instalaciones de alta intensidad (p. ej. VDE), así como las normas relativas al uso correcto de herramientas y a la utilización de dispositivos de protección personales.En la entrada de red y en los bornes de conexión del motor puede existir una tensión peligrosa, incluso cuando el convertidor está fuera de servicio. En estos campos de bornes se deben utilizar siempre destornilladores aislados. Cerciórese de que la fuente de tensión de entrada esté libre de tensión antes de establecer o cambiar conexiones con la unidad. Asegúrese de que el convertidor de frecuencia y el motor estén concebidos para la tensión de conexión correcta.
Los bornes de conexión a la red y de relés de señalización se encuentran en la parte superior del convertidor de frecuencia. Los bornes de conexión al motor y de resistencia de frenado se encuentran en la parte inferior del aparato.
Los bornes de control se encuentran en la parte delantera del convertidor de frecuencia. Para acceder a ellos, es preciso deslizar la cubierta de los bornes hacia abajo y retirarla. Entonces se puede acceder a los bornes de conexión desde delante.
¡Antes de conectar la tensión de alimentación se deben volver a colocar todas las cubiertas!
Se ha de tener en cuenta lo siguiente:
• Cerciorarse de que la fuente de tensión suministre la tensión adecuada y esté concebida para la corriente necesaria (ver capítulo. 7 Datos técnicos). Cerciorarse de que entre la fuente de tensión y el convertidor de frecuencia estén conectados los disyuntores apropiados con la gama de corriente nominal especificada.
• Conectar la tensión de red directamente a los bornes de red L1-L2/N-L3-PE.
• Para la conexión del motor se debe utilizar un cable de cuatro conductores. El cable se conecta a los bornes del motor PE-U-V-W.
• Si se utilizan cables del motor apantallados (recomendado), se debe colocar el apantallamiento del cable cubriendo una superficie extensa en la superficie de montaje metálica del armario de distribución.
Nota: La utilización de cable apantallado es imprescindible para cumplir el grado de supresión de interferencias especificado).
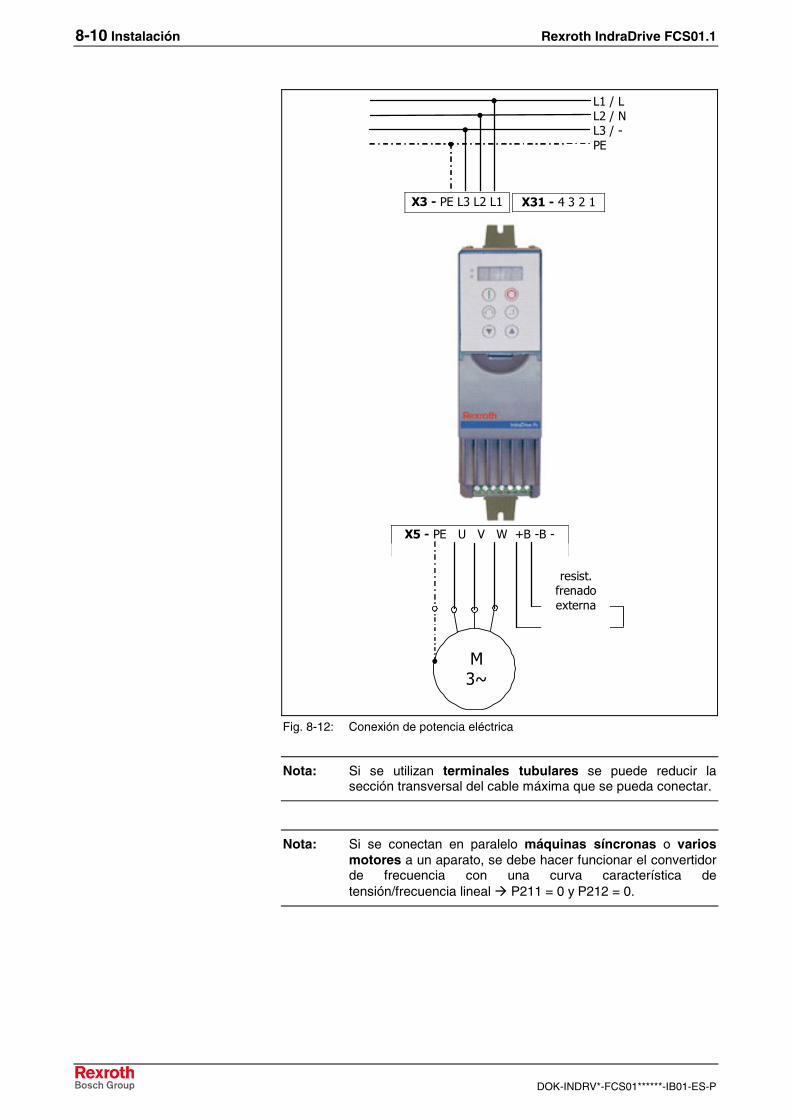
8-10 Instalación Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
L1 / L L2 / N L3 / - PE
M 3~
X5 - PE U V W +B -B -
X3 - PE L3 L2 L1
resist. frenado externa
X31 - 4 3 2 1
Fig. 8-12: Conexión de potencia eléctrica
Nota: Si se utilizan terminales tubulares se puede reducir la sección transversal del cable máxima que se pueda conectar.
Nota: Si se conectan en paralelo máquinas síncronas o varios motores a un aparato, se debe hacer funcionar el convertidor de frecuencia con una curva característica de tensión/frecuencia lineal P211 = 0 y P212 = 0.
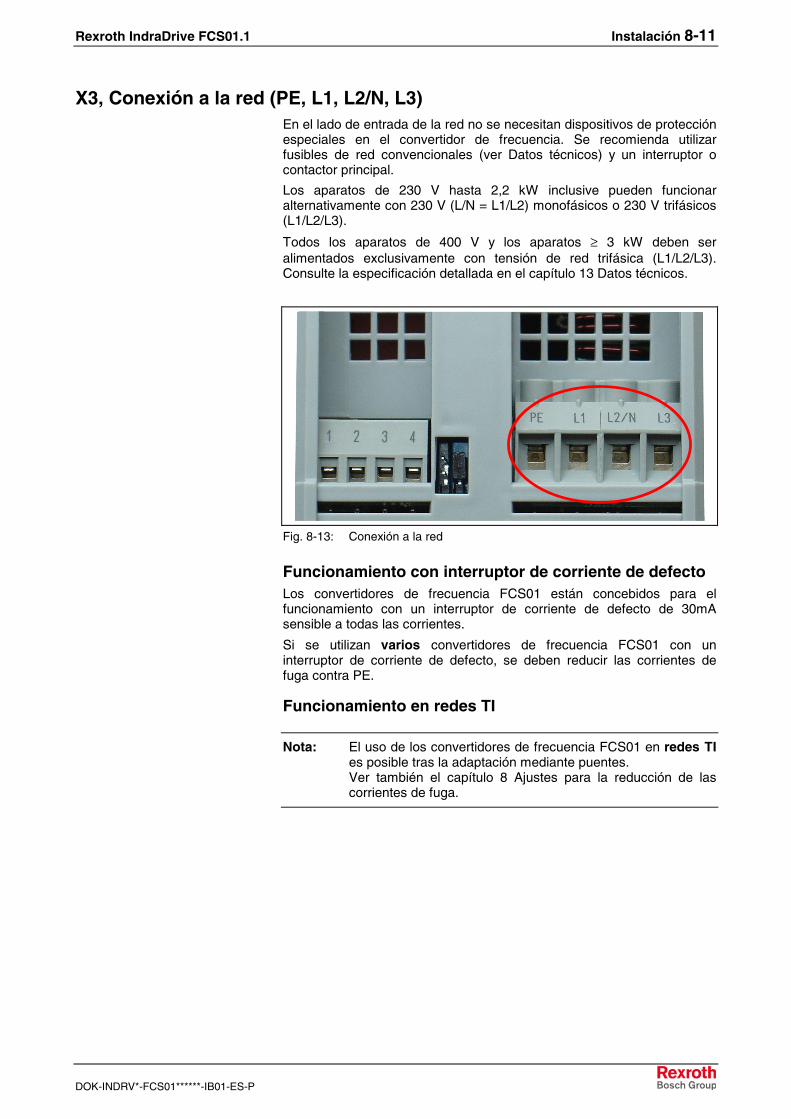
Rexroth IndraDrive FCS01.1 Instalación 8-11
DOK-INDRV*-FCS01******-IB01-ES-P
X3, Conexión a la red (PE, L1, L2/N, L3) En el lado de entrada de la red no se necesitan dispositivos de protección especiales en el convertidor de frecuencia. Se recomienda utilizar fusibles de red convencionales (ver Datos técnicos) y un interruptor o contactor principal.
Los aparatos de 230 V hasta 2,2 kW inclusive pueden funcionar alternativamente con 230 V (L/N = L1/L2) monofásicos o 230 V trifásicos (L1/L2/L3).
Todos los aparatos de 400 V y los aparatos ≥ 3 kW deben ser alimentados exclusivamente con tensión de red trifásica (L1/L2/L3). Consulte la especificación detallada en el capítulo 13 Datos técnicos.
Fig. 8-13: Conexión a la red
Funcionamiento con interruptor de corriente de defecto Los convertidores de frecuencia FCS01 están concebidos para el funcionamiento con un interruptor de corriente de defecto de 30mA sensible a todas las corrientes.
Si se utilizan varios convertidores de frecuencia FCS01 con un interruptor de corriente de defecto, se deben reducir las corrientes de fuga contra PE.
Funcionamiento en redes TI
Nota: El uso de los convertidores de frecuencia FCS01 en redes TI es posible tras la adaptación mediante puentes. Ver también el capítulo 8 Ajustes para la reducción de las corrientes de fuga.
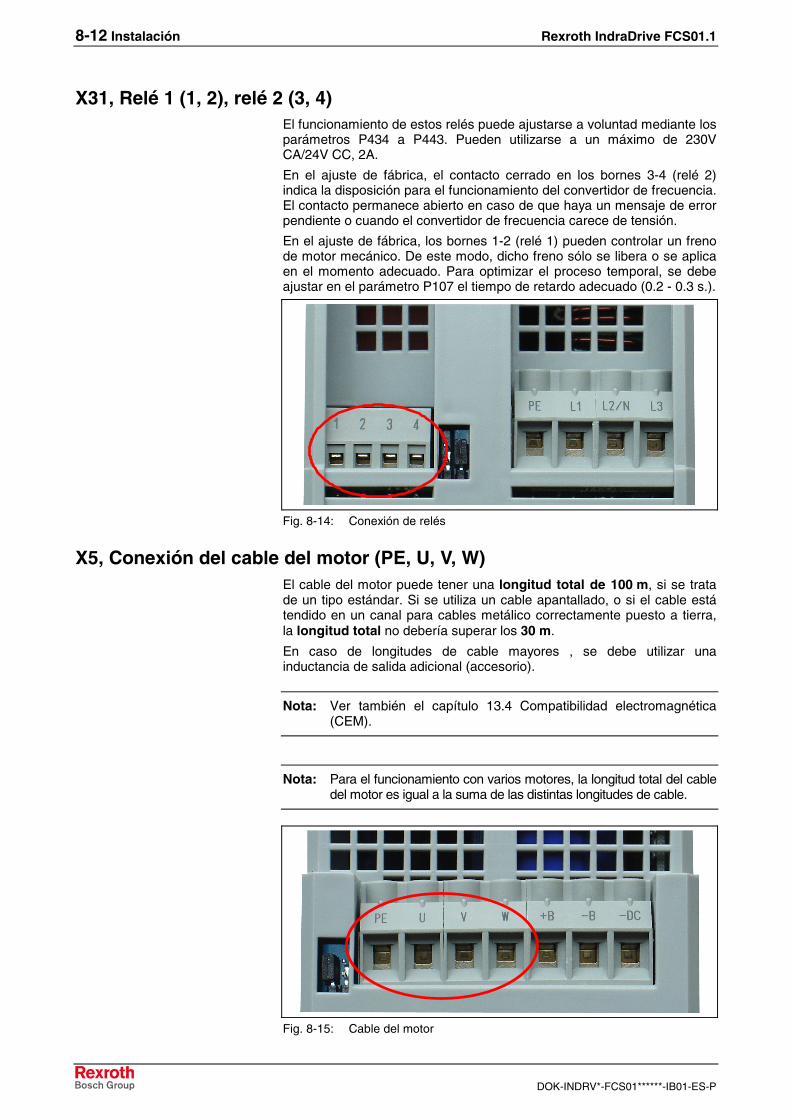
8-12 Instalación Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
X31, Relé 1 (1, 2), relé 2 (3, 4) El funcionamiento de estos relés puede ajustarse a voluntad mediante los parámetros P434 a P443. Pueden utilizarse a un máximo de 230V CA/24V CC, 2A.
En el ajuste de fábrica, el contacto cerrado en los bornes 3-4 (relé 2) indica la disposición para el funcionamiento del convertidor de frecuencia. El contacto permanece abierto en caso de que haya un mensaje de error pendiente o cuando el convertidor de frecuencia carece de tensión.
En el ajuste de fábrica, los bornes 1-2 (relé 1) pueden controlar un freno de motor mecánico. De este modo, dicho freno sólo se libera o se aplica en el momento adecuado. Para optimizar el proceso temporal, se debe ajustar en el parámetro P107 el tiempo de retardo adecuado (0.2 - 0.3 s.).
Fig. 8-14: Conexión de relés
X5, Conexión del cable del motor (PE, U, V, W) El cable del motor puede tener una longitud total de 100 m, si se trata de un tipo estándar. Si se utiliza un cable apantallado, o si el cable está tendido en un canal para cables metálico correctamente puesto a tierra, la longitud total no debería superar los 30 m.
En caso de longitudes de cable mayores , se debe utilizar una inductancia de salida adicional (accesorio).
Nota: Ver también el capítulo 13.4 Compatibilidad electromagnética (CEM).
Nota: Para el funcionamiento con varios motores, la longitud total del cable del motor es igual a la suma de las distintas longitudes de cable.
Fig. 8-15: Cable del motor
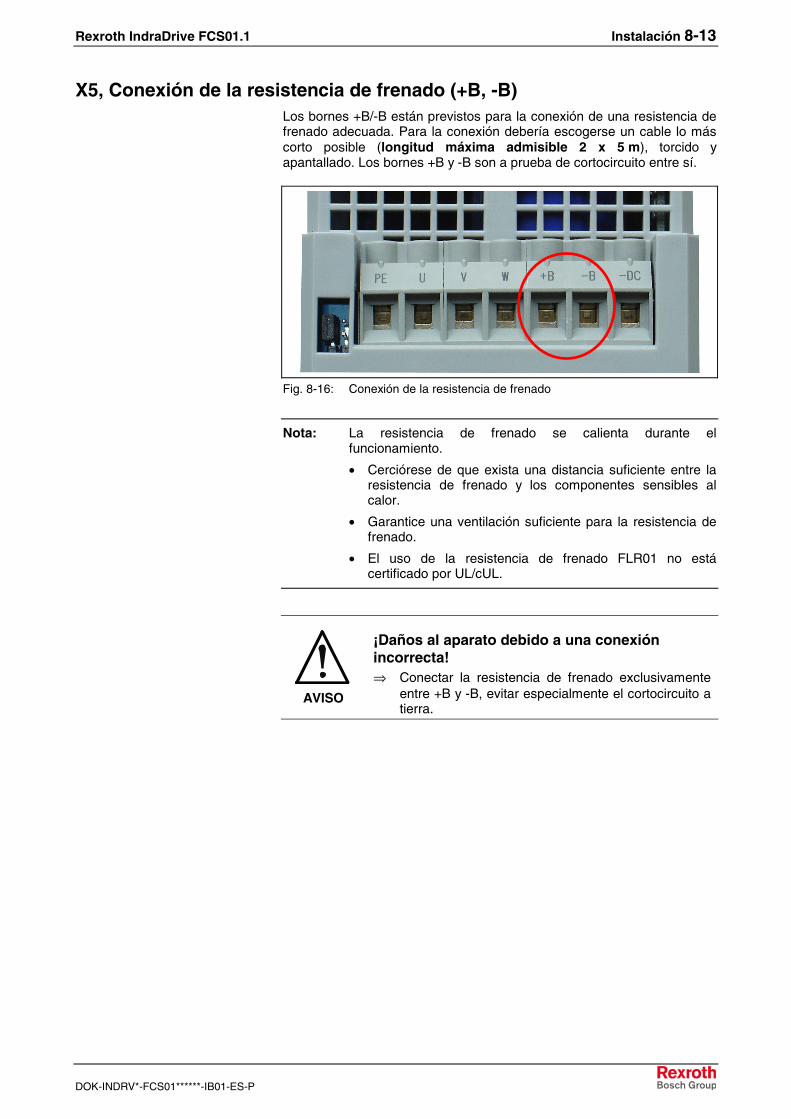
Rexroth IndraDrive FCS01.1 Instalación 8-13
DOK-INDRV*-FCS01******-IB01-ES-P
X5, Conexión de la resistencia de frenado (+B, -B) Los bornes +B/-B están previstos para la conexión de una resistencia de frenado adecuada. Para la conexión debería escogerse un cable lo más corto posible (longitud máxima admisible 2 x 5 m), torcido y apantallado. Los bornes +B y -B son a prueba de cortocircuito entre sí.
Fig. 8-16: Conexión de la resistencia de frenado
Nota: La resistencia de frenado se calienta durante el funcionamiento.
• Cerciórese de que exista una distancia suficiente entre la resistencia de frenado y los componentes sensibles al calor.
• Garantice una ventilación suficiente para la resistencia de frenado.
• El uso de la resistencia de frenado FLR01 no está certificado por UL/cUL.
AVISO
¡Daños al aparato debido a una conexión incorrecta! ⇒ Conectar la resistencia de frenado exclusivamente
entre +B y -B, evitar especialmente el cortocircuito a tierra.

8-14 Instalación Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
X5, Acoplamiento de tensión continua (+B, -DC) El acoplamiento de tensión continua con el FCS01 es viable cuando en una instalación funcionan simultáneamente varios accionamientos como motor y como generador. En este caso, la energía del accionamiento que funciona como generador se realimenta al que trabaja como motor. Existen ventajas en cuanto al consumo de energía y al utilizar resistencias de frenado.
Se deben tener en cuenta los siguientes puntos:
• Utilice un cable de conexión lo más corto posible entre +B y -DC.
• Asegúrese de que el acoplamiento no se establezca hasta que se haya recibido el mensaje de disposición para el funcionamiento. De lo contrario, existe el peligro de que los condensadores del circuito intermedio de todos los convertidores de frecuencia sean cargados por un solo convertidor de frecuencia.
• Asegúrese de que el acoplamiento se deshaga en cuento uno de los aparato ya no esté en disposición de funcionamiento.
• Para asegurar un alto grado de disponibilidad, se debe utilizar una resistencia de frenado (de baja potencia).
• Los convertidores de frecuencia sólo pueden utilizarse sin inductancia de red si están acoplados aparatos con la misma potencia (tipo idéntico) y actúan impedancias de red iguales (longitud de cable idéntica hacia el carril de red). De lo contrario, se debe prever una inductancia de red en el cable de alimentación de red delante de cada convertidor de frecuencia.
M3~
PE U V W +B -B -DC
PE L3 L2 L1
L1 / LL2 / NL3 / - PE
M 3~
PE U V W +B -B -DC
PE L3 L2 L1
Acoplamiento cuando los CF
están listos para funcionar
Señal de disposic. para
el func. de todos los CF
Fig. 8-17: Acoplamiento de tensión continua
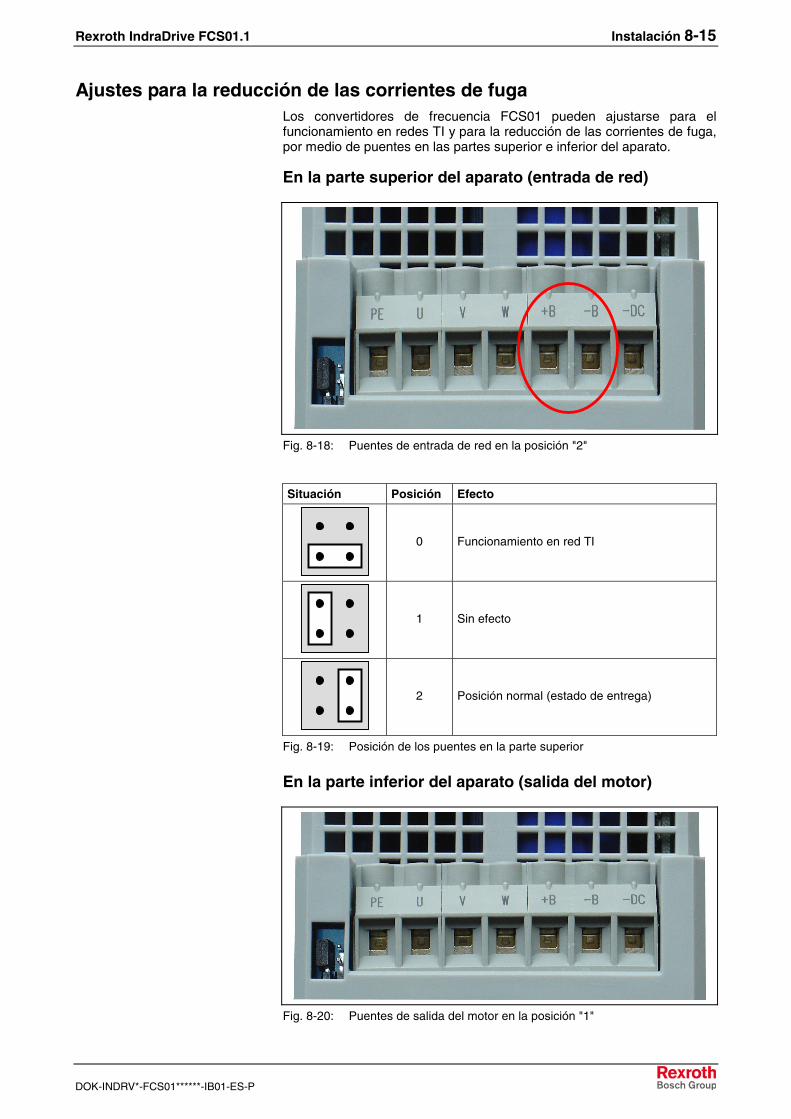
Rexroth IndraDrive FCS01.1 Instalación 8-15
DOK-INDRV*-FCS01******-IB01-ES-P
Ajustes para la reducción de las corrientes de fuga Los convertidores de frecuencia FCS01 pueden ajustarse para el funcionamiento en redes TI y para la reducción de las corrientes de fuga, por medio de puentes en las partes superior e inferior del aparato.
En la parte superior del aparato (entrada de red)
Fig. 8-18: Puentes de entrada de red en la posición "2"
Situación Posición Efecto
0 Funcionamiento en red TI
1 Sin efecto
2 Posición normal (estado de entrega)
Fig. 8-19: Posición de los puentes en la parte superior
En la parte inferior del aparato (salida del motor)
Fig. 8-20: Puentes de salida del motor en la posición "1"
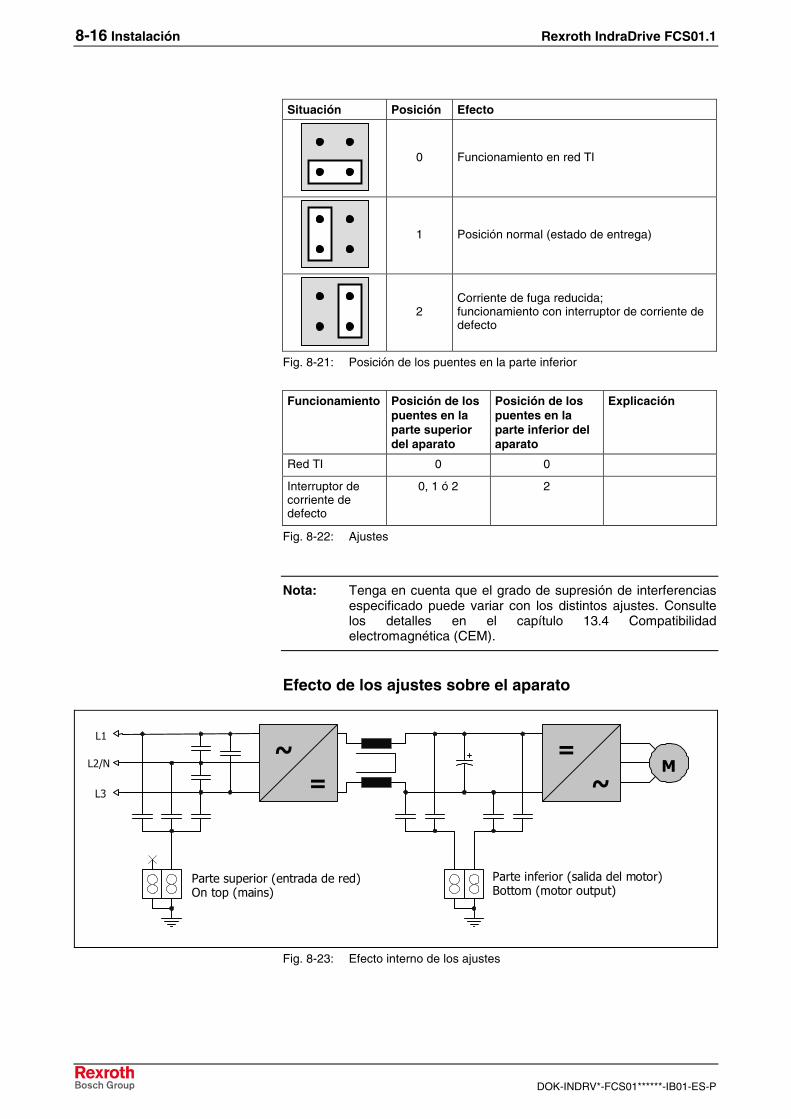
8-16 Instalación Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Situación Posición Efecto
0 Funcionamiento en red TI
1 Posición normal (estado de entrega)
2 Corriente de fuga reducida; funcionamiento con interruptor de corriente de defecto
Fig. 8-21: Posición de los puentes en la parte inferior
Funcionamiento Posición de los puentes en la parte superior del aparato
Posición de los puentes en la parte inferior del aparato
Explicación
Red TI 0 0
Interruptor de corriente de defecto
0, 1 ó 2 2
Fig. 8-22: Ajustes
Nota: Tenga en cuenta que el grado de supresión de interferencias especificado puede variar con los distintos ajustes. Consulte los detalles en el capítulo 13.4 Compatibilidad electromagnética (CEM).
Efecto de los ajustes sobre el aparato
L1
L2/N
L3
~
= ~
= M
Parte superior (entrada de red)On top (mains)
Parte inferior (salida del motor) Bottom (motor output)
Fig. 8-23: Efecto interno de los ajustes
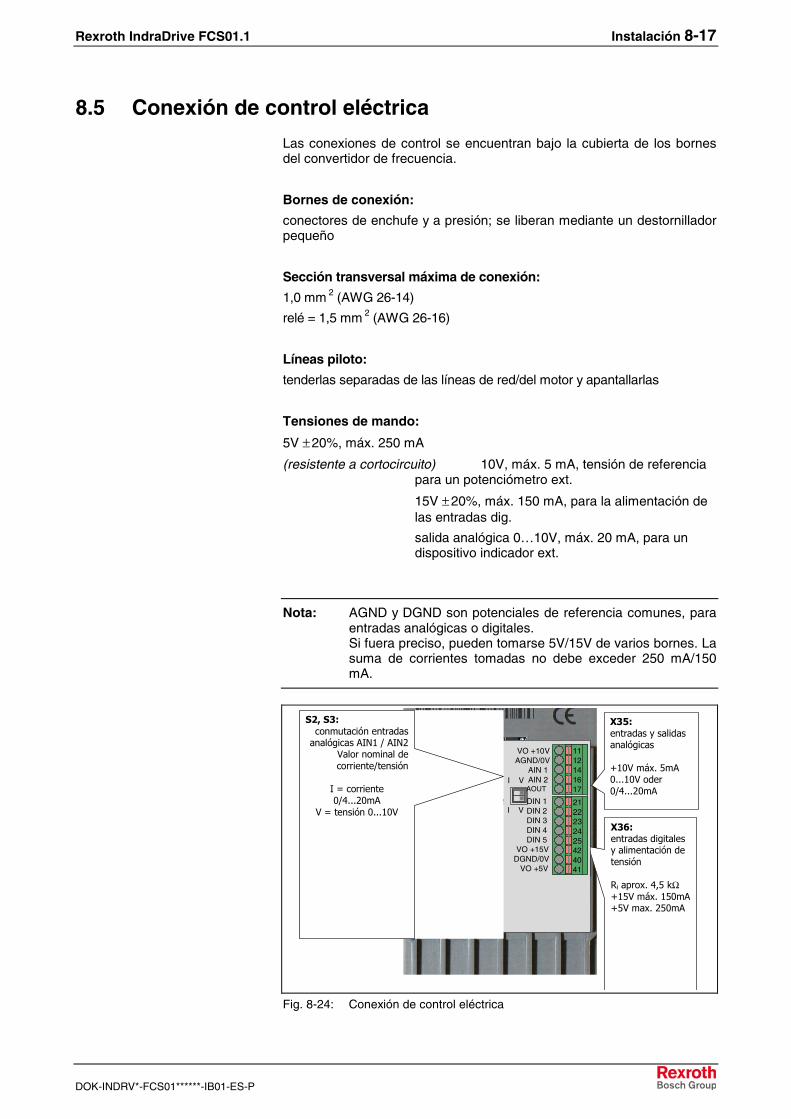
Rexroth IndraDrive FCS01.1 Instalación 8-17
DOK-INDRV*-FCS01******-IB01-ES-P
8.5 Conexión de control eléctrica
Las conexiones de control se encuentran bajo la cubierta de los bornes del convertidor de frecuencia.
Bornes de conexión:
conectores de enchufe y a presión; se liberan mediante un destornillador pequeño
Sección transversal máxima de conexión:
1,0 mm 2 (AWG 26-14)
relé = 1,5 mm 2 (AWG 26-16)
Líneas piloto:
tenderlas separadas de las líneas de red/del motor y apantallarlas
Tensiones de mando:
5V ± 20%, máx. 250 mA
(resistente a cortocircuito) 10V, máx. 5 mA, tensión de referencia para un potenciómetro ext.
15V ± 20%, máx. 150 mA, para la alimentación de las entradas dig.
salida analógica 0…10V, máx. 20 mA, para un dispositivo indicador ext.
Nota: AGND y DGND son potenciales de referencia comunes, para entradas analógicas o digitales. Si fuera preciso, pueden tomarse 5V/15V de varios bornes. La suma de corrientes tomadas no debe exceder 250 mA/150 mA.
X35: entradas y salidas analógicas +10V máx. 5mA 0...10V oder 0/4...20mA
X36: entradas digitales y alimentación de tensión Ri aprox. 4,5 kΩ +15V máx. 150mA+5V max. 250mA
11 12 14 16 17 AOUT
AIN 2AIN 1
AGND/0VVO +10V
21 22 23 24 25 42 40 41
I V
I V
S2 AIN 1DIN 1DIN 2DIN 3DIN 4DIN 5
VO +15VDGND/0V
VO +5V
S3 AIN 2
S2, S3: conmutación entradas
analógicas AIN1 / AIN2 Valor nominal de corriente/tensión
I = corriente 0/4...20mA
V = tensión 0...10V
Fig. 8-24: Conexión de control eléctrica
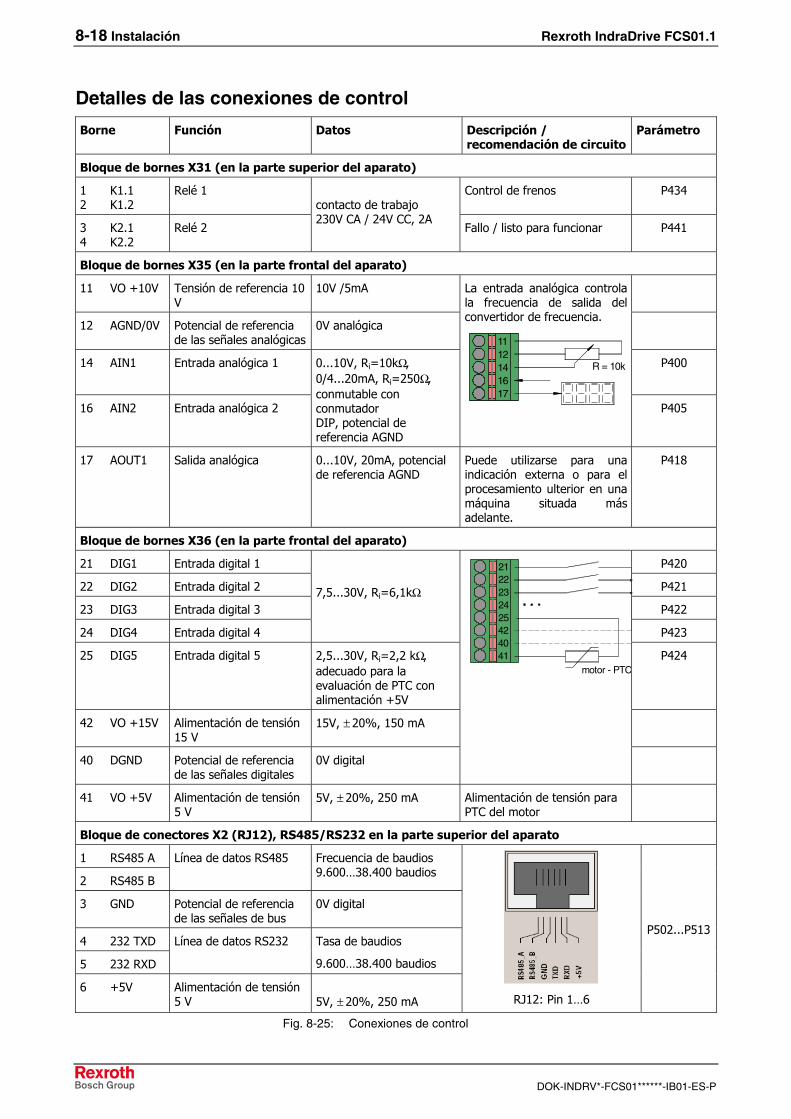
8-18 Instalación Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Detalles de las conexiones de control
Borne Función Datos Descripción / recomendación de circuito
Parámetro
Bloque de bornes X31 (en la parte superior del aparato)
1 K1.1 2 K1.2
Relé 1 Control de frenos P434
3 K2.1 4 K2.2
Relé 2
contacto de trabajo 230V CA / 24V CC, 2A
Fallo / listo para funcionar P441
Bloque de bornes X35 (en la parte frontal del aparato)
11 VO +10V Tensión de referencia 10 V
10V /5mA
12 AGND/0V Potencial de referencia de las señales analógicas
0V analógica
14 AIN1 Entrada analógica 1 P400
16 AIN2 Entrada analógica 2
0...10V, Ri=10kΩ, 0/4...20mA, Ri=250Ω, conmutable con conmutador DIP, potencial de referencia AGND
La entrada analógica controla la frecuencia de salida del convertidor de frecuencia.
1112141617
R = 10k
P405
17 AOUT1 Salida analógica 0...10V, 20mA, potencial de referencia AGND
Puede utilizarse para una indicación externa o para el procesamiento ulterior en una máquina situada más adelante.
P418
Bloque de bornes X36 (en la parte frontal del aparato)
21 DIG1 Entrada digital 1 P420
22 DIG2 Entrada digital 2 P421
23 DIG3 Entrada digital 3 P422
24 DIG4 Entrada digital 4
7,5...30V, Ri=6,1kΩ
P423
25 DIG5 Entrada digital 5 2,5...30V, Ri=2,2 kΩ, adecuado para la evaluación de PTC con alimentación +5V
P424
42 VO +15V Alimentación de tensión 15 V
15V, ± 20%, 150 mA
40 DGND Potencial de referencia de las señales digitales
0V digital
2122232425424041
motor - PTC
41 VO +5V Alimentación de tensión 5 V
5V, ± 20%, 250 mA Alimentación de tensión para PTC del motor
Bloque de conectores X2 (RJ12), RS485/RS232 en la parte superior del aparato
1 RS485 A
2 RS485 B
Línea de datos RS485 Frecuencia de baudios 9.600…38.400 baudios
3 GND Potencial de referencia de las señales de bus
0V digital
4 232 TXD
5 232 RXD
Línea de datos RS232 Tasa de baudios
9.600…38.400 baudios
6 +5V Alimentación de tensión 5 V
5V, ± 20%, 250 mA
RJ12: Pin 1…6
P502...P513
Fig. 8-25: Conexiones de control
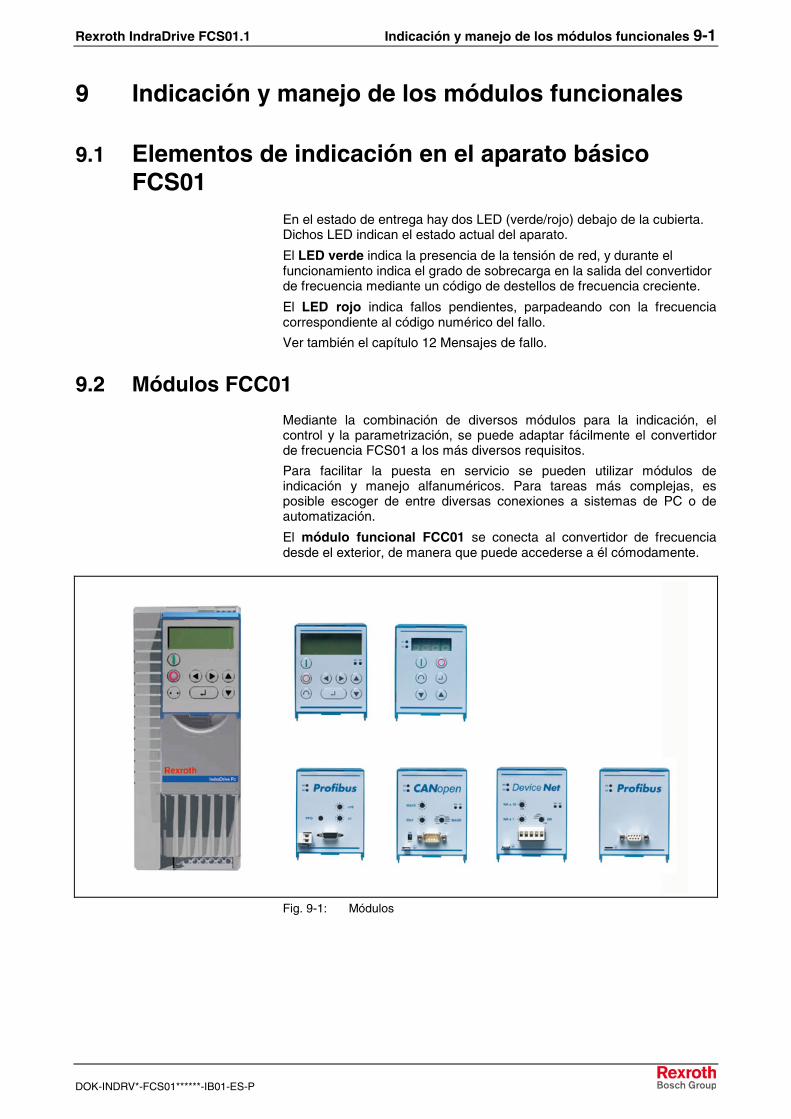
Rexroth IndraDrive FCS01.1 Indicación y manejo de los módulos funcionales 9-1
DOK-INDRV*-FCS01******-IB01-ES-P
9 Indicación y manejo de los módulos funcionales
9.1 Elementos de indicación en el aparato básico FCS01
En el estado de entrega hay dos LED (verde/rojo) debajo de la cubierta. Dichos LED indican el estado actual del aparato.
El LED verde indica la presencia de la tensión de red, y durante el funcionamiento indica el grado de sobrecarga en la salida del convertidor de frecuencia mediante un código de destellos de frecuencia creciente.
El LED rojo indica fallos pendientes, parpadeando con la frecuencia correspondiente al código numérico del fallo.
Ver también el capítulo 12 Mensajes de fallo.
9.2 Módulos FCC01
Mediante la combinación de diversos módulos para la indicación, el control y la parametrización, se puede adaptar fácilmente el convertidor de frecuencia FCS01 a los más diversos requisitos.
Para facilitar la puesta en servicio se pueden utilizar módulos de indicación y manejo alfanuméricos. Para tareas más complejas, es posible escoger de entre diversas conexiones a sistemas de PC o de automatización.
El módulo funcional FCC01 se conecta al convertidor de frecuencia desde el exterior, de manera que puede accederse a él cómodamente.
Fig. 9-1: Módulos
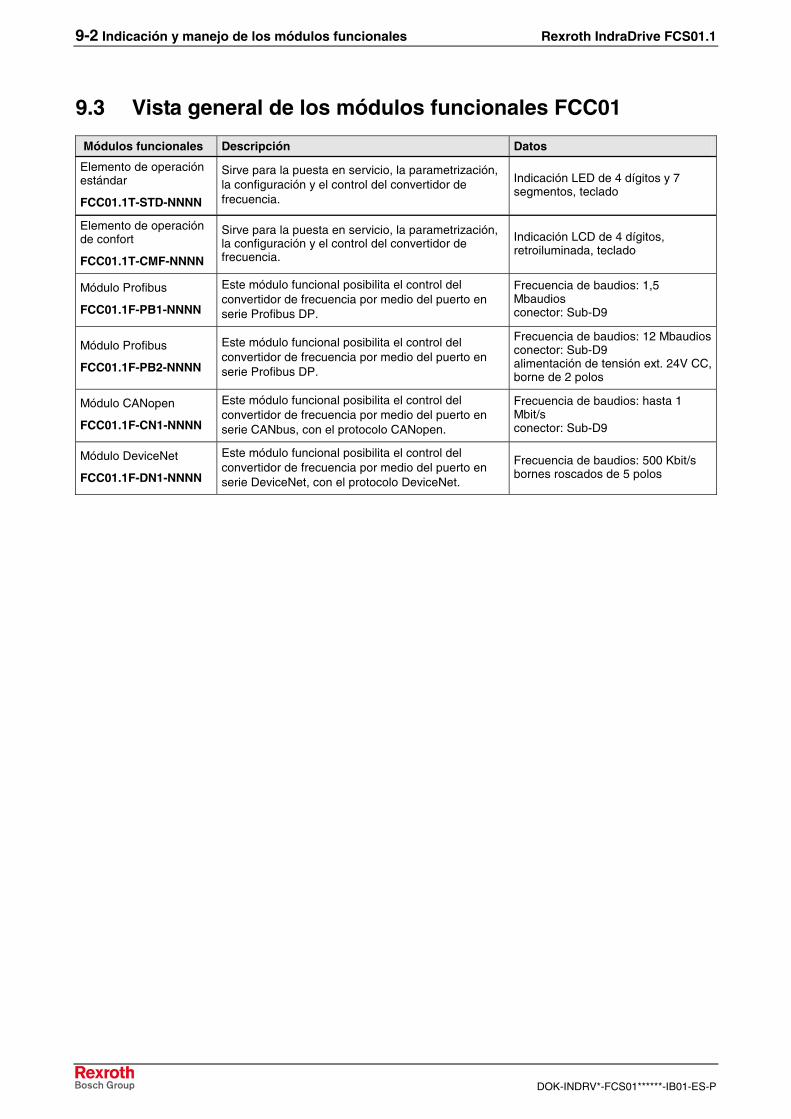
9-2 Indicación y manejo de los módulos funcionales Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
9.3 Vista general de los módulos funcionales FCC01
Módulos funcionales Descripción Datos
Elemento de operación estándar
FCC01.1T-STD-NNNN
Sirve para la puesta en servicio, la parametrización, la configuración y el control del convertidor de frecuencia.
Indicación LED de 4 dígitos y 7 segmentos, teclado
Elemento de operación de confort
FCC01.1T-CMF-NNNN
Sirve para la puesta en servicio, la parametrización, la configuración y el control del convertidor de frecuencia.
Indicación LCD de 4 dígitos, retroiluminada, teclado
Módulo Profibus
FCC01.1F-PB1-NNNN
Este módulo funcional posibilita el control del convertidor de frecuencia por medio del puerto en serie Profibus DP.
Frecuencia de baudios: 1,5 Mbaudios conector: Sub-D9
Módulo Profibus
FCC01.1F-PB2-NNNN
Este módulo funcional posibilita el control del convertidor de frecuencia por medio del puerto en serie Profibus DP.
Frecuencia de baudios: 12 Mbaudiosconector: Sub-D9 alimentación de tensión ext. 24V CC, borne de 2 polos
Módulo CANopen
FCC01.1F-CN1-NNNN
Este módulo funcional posibilita el control del convertidor de frecuencia por medio del puerto en serie CANbus, con el protocolo CANopen.
Frecuencia de baudios: hasta 1 Mbit/s conector: Sub-D9
Módulo DeviceNet
FCC01.1F-DN1-NNNN
Este módulo funcional posibilita el control del convertidor de frecuencia por medio del puerto en serie DeviceNet, con el protocolo DeviceNet.
Frecuencia de baudios: 500 Kbit/s bornes roscados de 5 polos
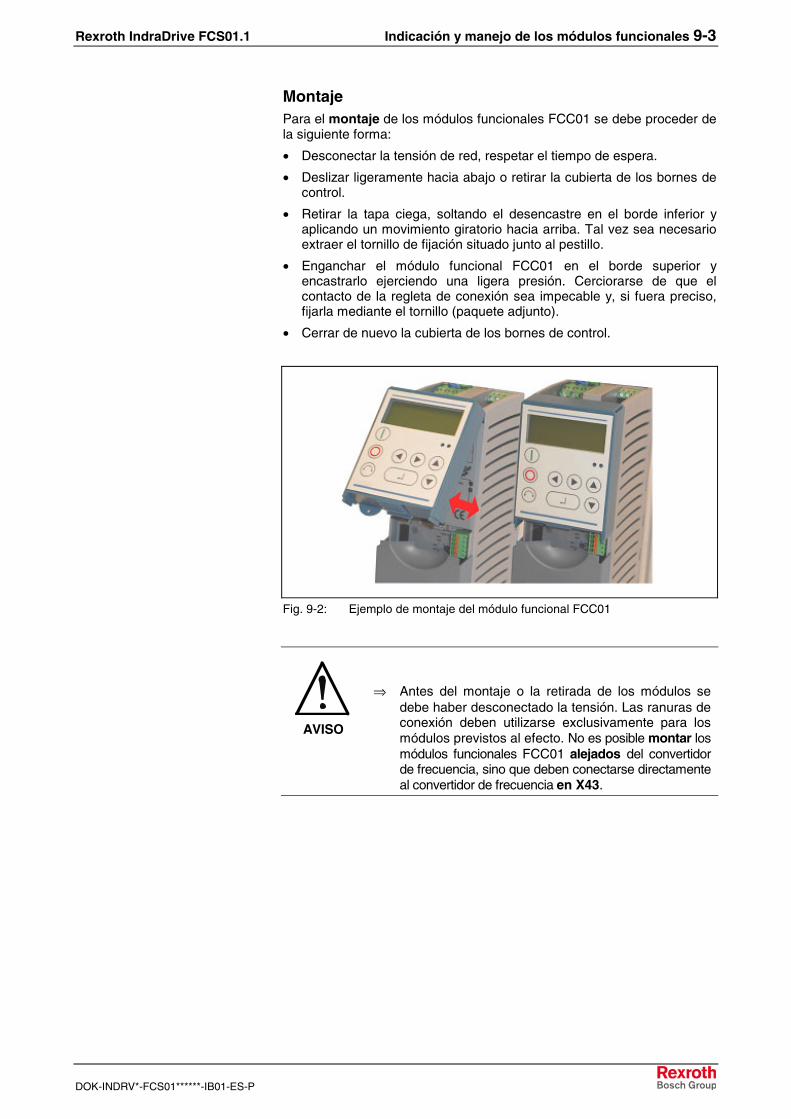
Rexroth IndraDrive FCS01.1 Indicación y manejo de los módulos funcionales 9-3
DOK-INDRV*-FCS01******-IB01-ES-P
Montaje Para el montaje de los módulos funcionales FCC01 se debe proceder de la siguiente forma:
• Desconectar la tensión de red, respetar el tiempo de espera.
• Deslizar ligeramente hacia abajo o retirar la cubierta de los bornes de control.
• Retirar la tapa ciega, soltando el desencastre en el borde inferior y aplicando un movimiento giratorio hacia arriba. Tal vez sea necesario extraer el tornillo de fijación situado junto al pestillo.
• Enganchar el módulo funcional FCC01 en el borde superior y encastrarlo ejerciendo una ligera presión. Cerciorarse de que el contacto de la regleta de conexión sea impecable y, si fuera preciso, fijarla mediante el tornillo (paquete adjunto).
• Cerrar de nuevo la cubierta de los bornes de control.
Fig. 9-2: Ejemplo de montaje del módulo funcional FCC01
AVISO
⇒ Antes del montaje o la retirada de los módulos se
debe haber desconectado la tensión. Las ranuras de conexión deben utilizarse exclusivamente para los módulos previstos al efecto. No es posible montar los módulos funcionales FCC01 alejados del convertidor de frecuencia, sino que deben conectarse directamente al convertidor de frecuencia en X43.
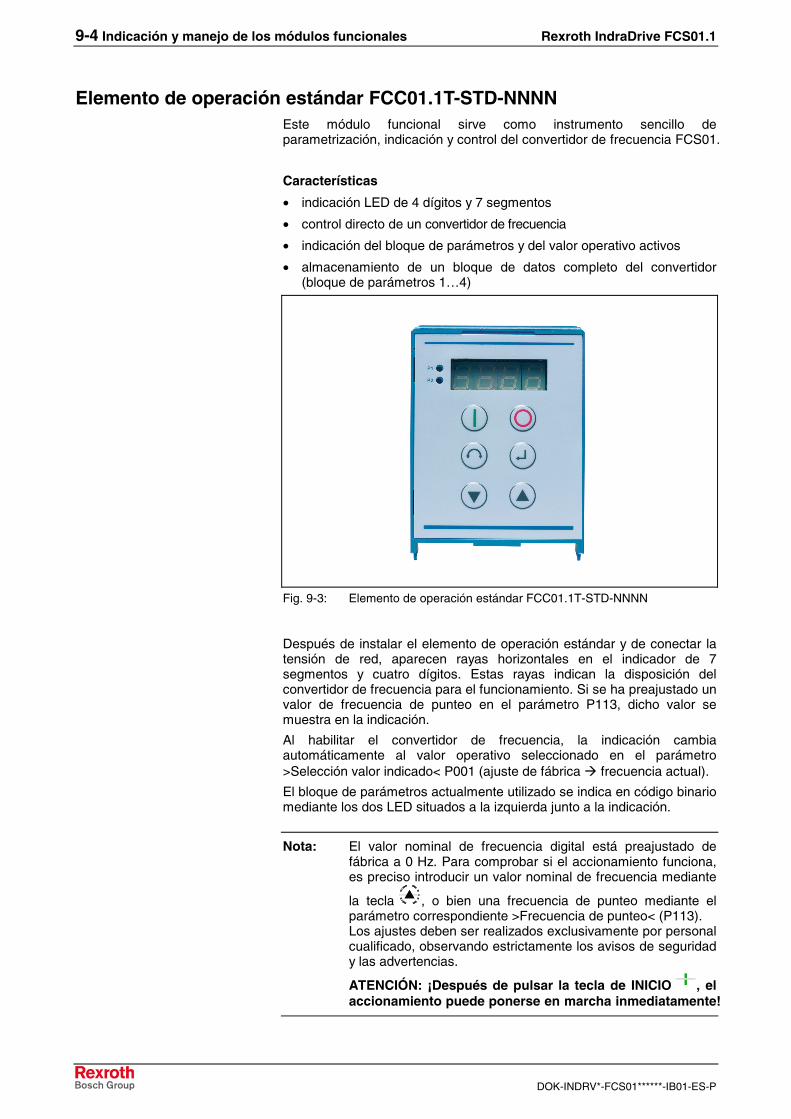
9-4 Indicación y manejo de los módulos funcionales Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Elemento de operación estándar FCC01.1T-STD-NNNN Este módulo funcional sirve como instrumento sencillo de parametrización, indicación y control del convertidor de frecuencia FCS01.
Características
• indicación LED de 4 dígitos y 7 segmentos
• control directo de un convertidor de frecuencia
• indicación del bloque de parámetros y del valor operativo activos
• almacenamiento de un bloque de datos completo del convertidor (bloque de parámetros 1…4)
Fig. 9-3: Elemento de operación estándar FCC01.1T-STD-NNNN
Después de instalar el elemento de operación estándar y de conectar la tensión de red, aparecen rayas horizontales en el indicador de 7 segmentos y cuatro dígitos. Estas rayas indican la disposición del convertidor de frecuencia para el funcionamiento. Si se ha preajustado un valor de frecuencia de punteo en el parámetro P113, dicho valor se muestra en la indicación.
Al habilitar el convertidor de frecuencia, la indicación cambia automáticamente al valor operativo seleccionado en el parámetro >Selección valor indicado< P001 (ajuste de fábrica frecuencia actual).
El bloque de parámetros actualmente utilizado se indica en código binario mediante los dos LED situados a la izquierda junto a la indicación.
Nota: El valor nominal de frecuencia digital está preajustado de fábrica a 0 Hz. Para comprobar si el accionamiento funciona, es preciso introducir un valor nominal de frecuencia mediante
la tecla , o bien una frecuencia de punteo mediante el parámetro correspondiente >Frecuencia de punteo< (P113). Los ajustes deben ser realizados exclusivamente por personal cualificado, observando estrictamente los avisos de seguridad y las advertencias.
ATENCIÓN: ¡Después de pulsar la tecla de INICIO , el accionamiento puede ponerse en marcha inmediatamente!
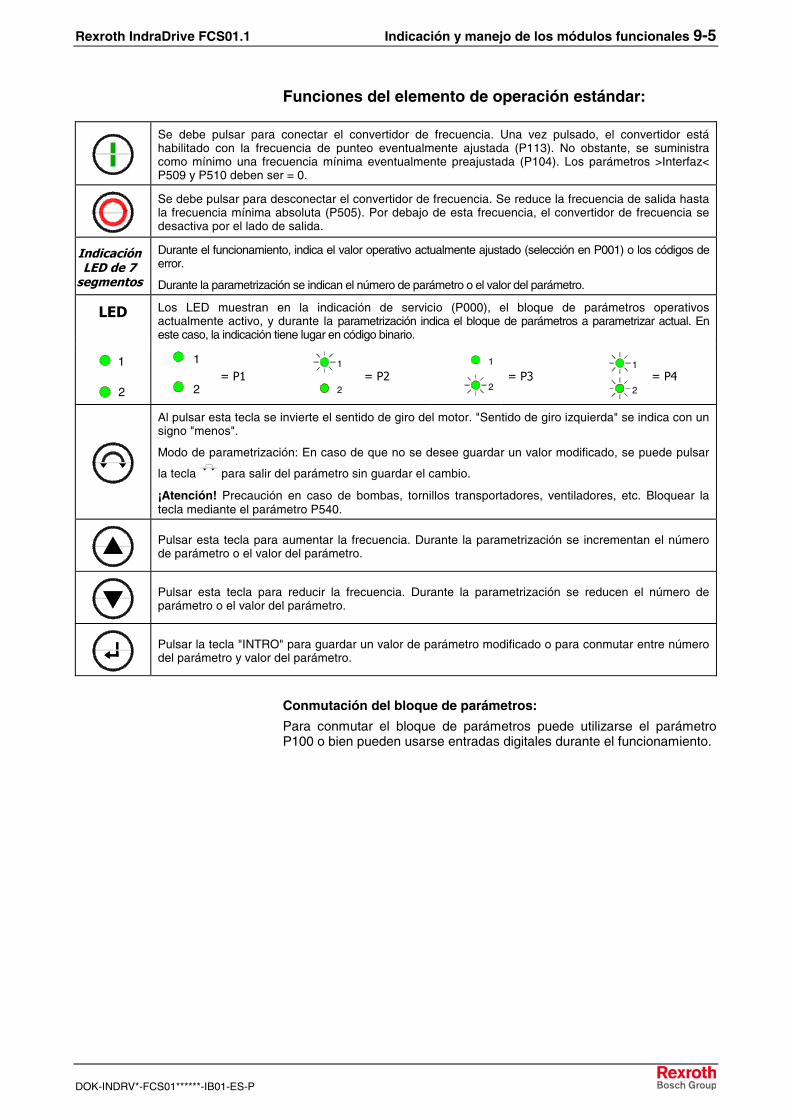
Rexroth IndraDrive FCS01.1 Indicación y manejo de los módulos funcionales 9-5
DOK-INDRV*-FCS01******-IB01-ES-P
Funciones del elemento de operación estándar:
Se debe pulsar para conectar el convertidor de frecuencia. Una vez pulsado, el convertidor está habilitado con la frecuencia de punteo eventualmente ajustada (P113). No obstante, se suministra como mínimo una frecuencia mínima eventualmente preajustada (P104). Los parámetros >Interfaz< P509 y P510 deben ser = 0.
Se debe pulsar para desconectar el convertidor de frecuencia. Se reduce la frecuencia de salida hasta la frecuencia mínima absoluta (P505). Por debajo de esta frecuencia, el convertidor de frecuencia se desactiva por el lado de salida.
Indicación LED de 7
segmentos
Durante el funcionamiento, indica el valor operativo actualmente ajustado (selección en P001) o los códigos de error.
Durante la parametrización se indican el número de parámetro o el valor del parámetro.
Los LED muestran en la indicación de servicio (P000), el bloque de parámetros operativos actualmente activo, y durante la parametrización indica el bloque de parámetros a parametrizar actual. En este caso, la indicación tiene lugar en código binario.
LED
1
2
1
2
= P1 2
1
= P2 1
2 = P3
2
1
= P4
Al pulsar esta tecla se invierte el sentido de giro del motor. "Sentido de giro izquierda" se indica con un signo "menos".
Modo de parametrización: En caso de que no se desee guardar un valor modificado, se puede pulsar
la tecla para salir del parámetro sin guardar el cambio.
¡Atención! Precaución en caso de bombas, tornillos transportadores, ventiladores, etc. Bloquear la tecla mediante el parámetro P540.
Pulsar esta tecla para aumentar la frecuencia. Durante la parametrización se incrementan el número de parámetro o el valor del parámetro.
Pulsar esta tecla para reducir la frecuencia. Durante la parametrización se reducen el número de parámetro o el valor del parámetro.
Pulsar la tecla "INTRO" para guardar un valor de parámetro modificado o para conmutar entre número del parámetro y valor del parámetro.
Conmutación del bloque de parámetros:
Para conmutar el bloque de parámetros puede utilizarse el parámetro P100 o bien pueden usarse entradas digitales durante el funcionamiento.
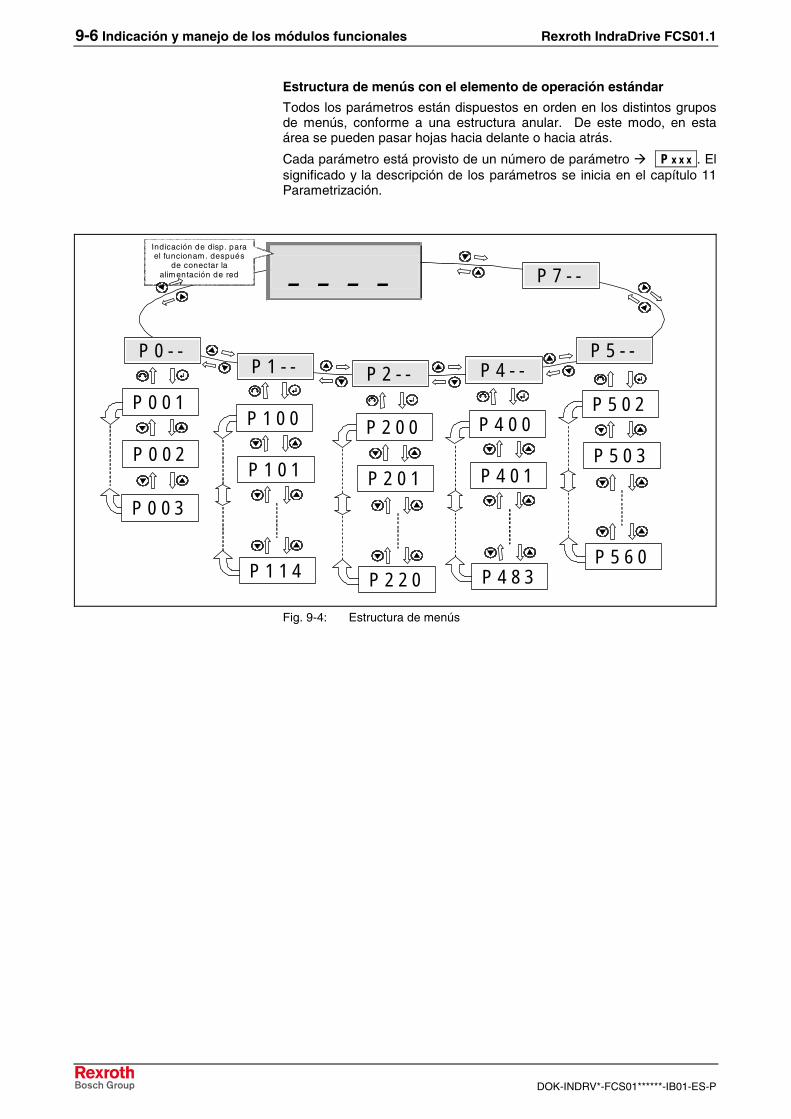
9-6 Indicación y manejo de los módulos funcionales Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Estructura de menús con el elemento de operación estándar
Todos los parámetros están dispuestos en orden en los distintos grupos de menús, conforme a una estructura anular. De este modo, en esta área se pueden pasar hojas hacia delante o hacia atrás.
Cada parámetro está provisto de un número de parámetro P x x x . El significado y la descripción de los parámetros se inicia en el capítulo 11 Parametrización.
P 0 - -
_ _ _ _
P 1 - - P 2 - - P 4 - - P 5 - -
P 7 - -
P 0 0 1
P 0 0 2
P 1 0 0
P 1 0 1
P 1 1 4
P 2 0 0
P 2 0 1
P 2 2 0
P 4 0 0
P 4 0 1
P 4 8 3
Indicación de disp. para el funcionam . después
de conectar la alim entación de red
P 0 0 3
P 5 0 2
P 5 0 3
P 5 6 0
Fig. 9-4: Estructura de menús
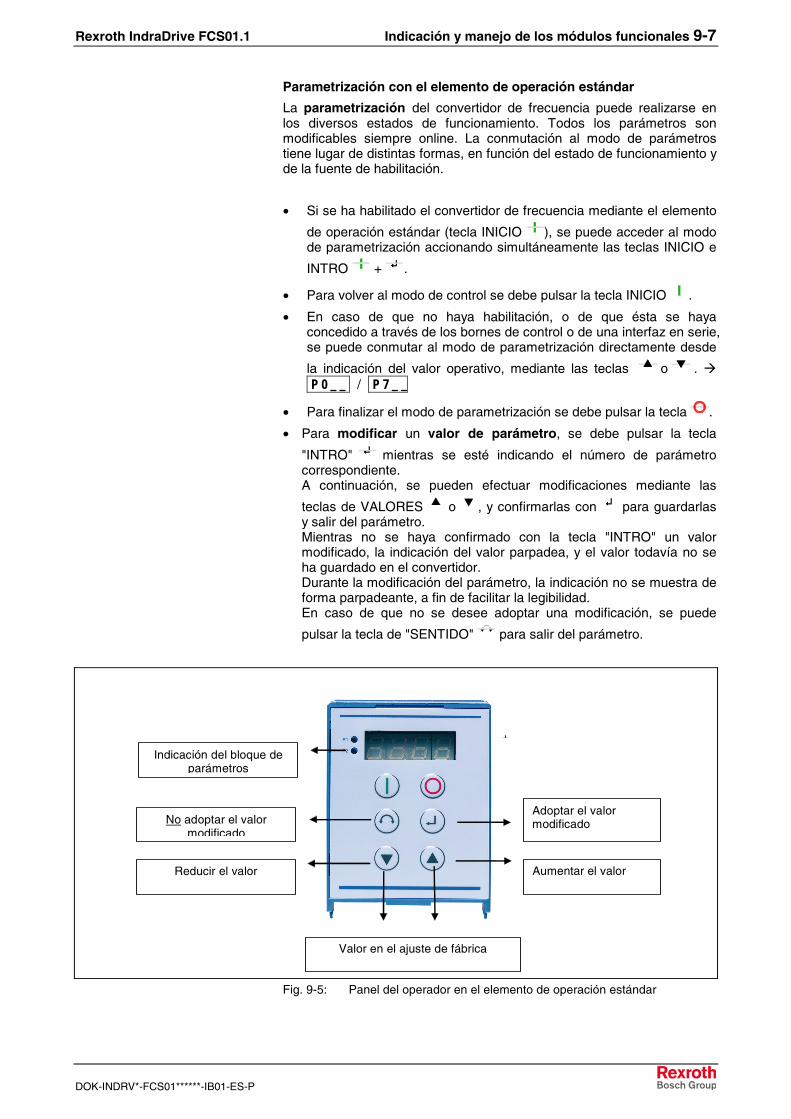
Rexroth IndraDrive FCS01.1 Indicación y manejo de los módulos funcionales 9-7
DOK-INDRV*-FCS01******-IB01-ES-P
Parametrización con el elemento de operación estándar
La parametrización del convertidor de frecuencia puede realizarse en los diversos estados de funcionamiento. Todos los parámetros son modificables siempre online. La conmutación al modo de parámetros tiene lugar de distintas formas, en función del estado de funcionamiento y de la fuente de habilitación.
• Si se ha habilitado el convertidor de frecuencia mediante el elemento
de operación estándar (tecla INICIO ), se puede acceder al modo de parametrización accionando simultáneamente las teclas INICIO e
INTRO + .
• Para volver al modo de control se debe pulsar la tecla INICIO .
• En caso de que no haya habilitación, o de que ésta se haya concedido a través de los bornes de control o de una interfaz en serie, se puede conmutar al modo de parametrización directamente desde
la indicación del valor operativo, mediante las teclas o . P 0 _ _ / P 7 _ _
• Para finalizar el modo de parametrización se debe pulsar la tecla .
• Para modificar un valor de parámetro, se debe pulsar la tecla
"INTRO" mientras se esté indicando el número de parámetro correspondiente. A continuación, se pueden efectuar modificaciones mediante las
teclas de VALORES o , y confirmarlas con para guardarlas y salir del parámetro. Mientras no se haya confirmado con la tecla "INTRO" un valor modificado, la indicación del valor parpadea, y el valor todavía no se ha guardado en el convertidor. Durante la modificación del parámetro, la indicación no se muestra de forma parpadeante, a fin de facilitar la legibilidad. En caso de que no se desee adoptar una modificación, se puede
pulsar la tecla de "SENTIDO" para salir del parámetro.
Adoptar el valor modificado
Valor en el ajuste de fábrica
Aumentar el valor Reducir el valor
No adoptar el valor modificado
Indicación del bloque de parámetros
+
Fig. 9-5: Panel del operador en el elemento de operación estándar
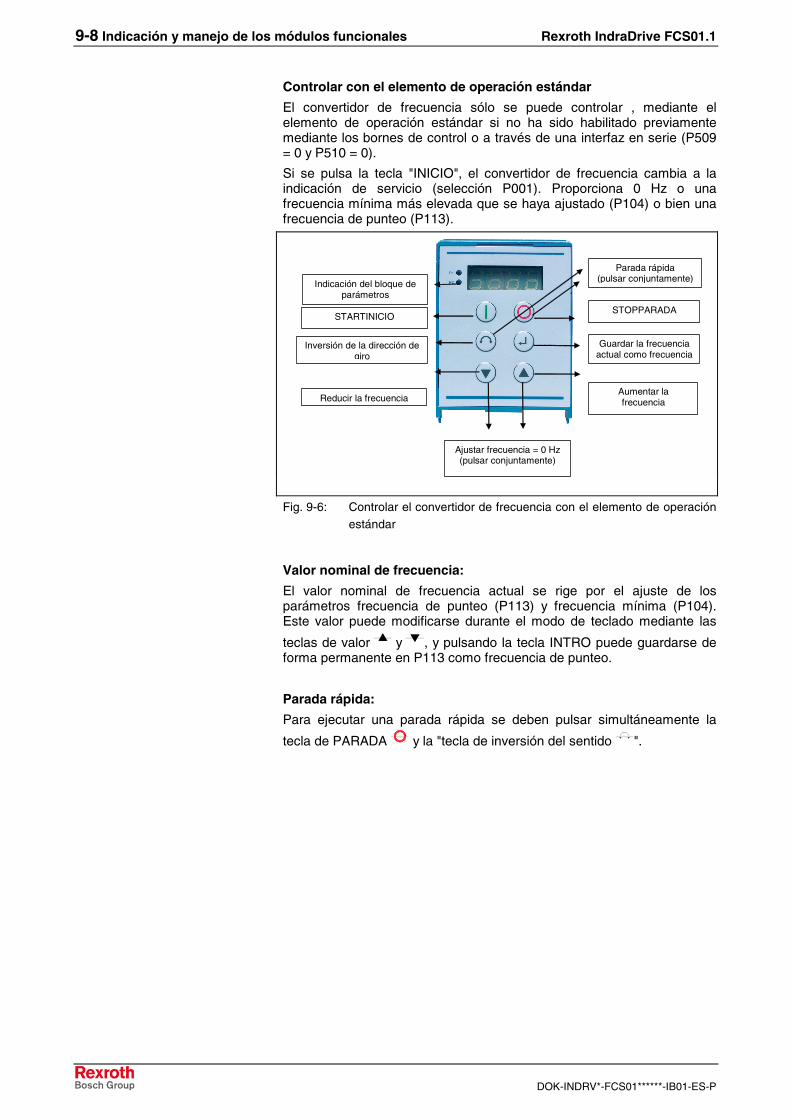
9-8 Indicación y manejo de los módulos funcionales Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Controlar con el elemento de operación estándar
El convertidor de frecuencia sólo se puede controlar , mediante el elemento de operación estándar si no ha sido habilitado previamente mediante los bornes de control o a través de una interfaz en serie (P509 = 0 y P510 = 0).
Si se pulsa la tecla "INICIO", el convertidor de frecuencia cambia a la indicación de servicio (selección P001). Proporciona 0 Hz o una frecuencia mínima más elevada que se haya ajustado (P104) o bien una frecuencia de punteo (P113).
STOPPARADA
Guardar la frecuencia actual como frecuencia
Ajustar frecuencia = 0 Hz (pulsar conjuntamente)
Aumentar la frecuencia
Inversión de la dirección de giro
Reducir la frecuencia
STARTINICIO
Indicación del bloque de parámetros
Parada rápida (pulsar conjuntamente)
+
Fig. 9-6: Controlar el convertidor de frecuencia con el elemento de operación estándar
Valor nominal de frecuencia:
El valor nominal de frecuencia actual se rige por el ajuste de los parámetros frecuencia de punteo (P113) y frecuencia mínima (P104). Este valor puede modificarse durante el modo de teclado mediante las
teclas de valor y , y pulsando la tecla INTRO puede guardarse de forma permanente en P113 como frecuencia de punteo.
Parada rápida:
Para ejecutar una parada rápida se deben pulsar simultáneamente la
tecla de PARADA y la "tecla de inversión del sentido ".
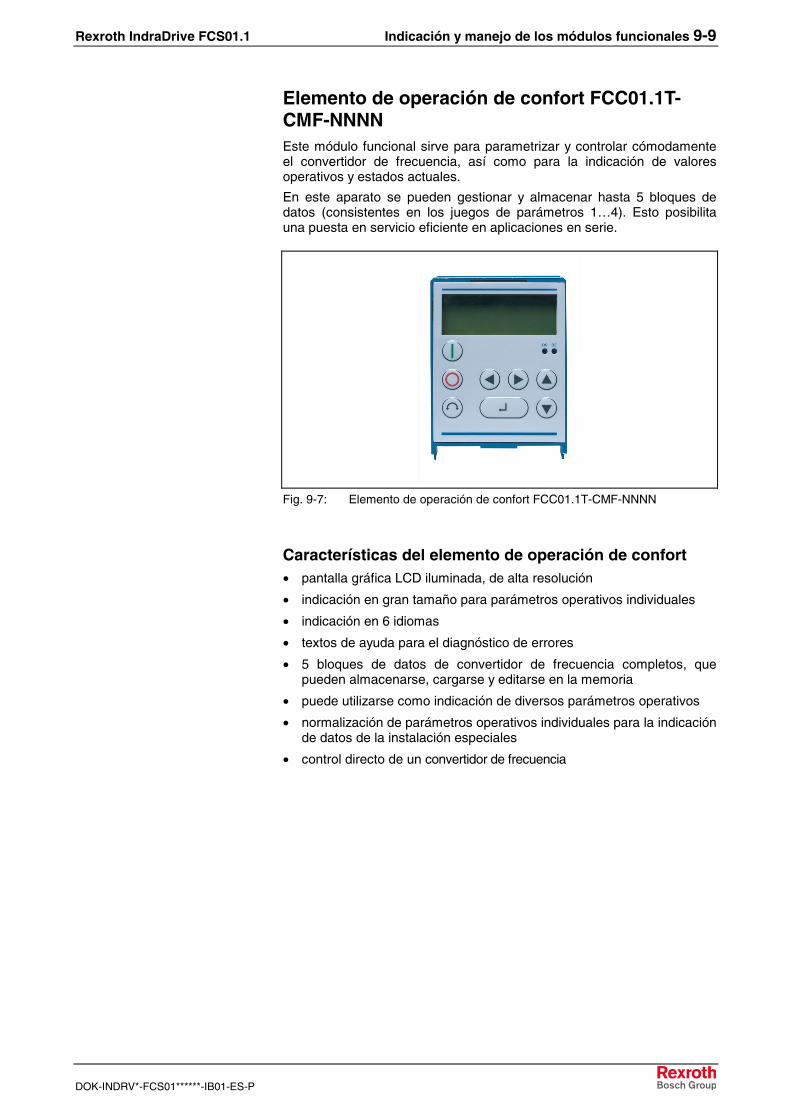
Rexroth IndraDrive FCS01.1 Indicación y manejo de los módulos funcionales 9-9
DOK-INDRV*-FCS01******-IB01-ES-P
Elemento de operación de confort FCC01.1T-CMF-NNNN Este módulo funcional sirve para parametrizar y controlar cómodamente el convertidor de frecuencia, así como para la indicación de valores operativos y estados actuales.
En este aparato se pueden gestionar y almacenar hasta 5 bloques de datos (consistentes en los juegos de parámetros 1…4). Esto posibilita una puesta en servicio eficiente en aplicaciones en serie.
Fig. 9-7: Elemento de operación de confort FCC01.1T-CMF-NNNN
Características del elemento de operación de confort • pantalla gráfica LCD iluminada, de alta resolución
• indicación en gran tamaño para parámetros operativos individuales
• indicación en 6 idiomas
• textos de ayuda para el diagnóstico de errores
• 5 bloques de datos de convertidor de frecuencia completos, que pueden almacenarse, cargarse y editarse en la memoria
• puede utilizarse como indicación de diversos parámetros operativos
• normalización de parámetros operativos individuales para la indicación de datos de la instalación especiales
• control directo de un convertidor de frecuencia
9-10 Indicación y manejo de los módulos funcionales Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Primera puesta en servicio La primera vez que se enciende el CF con el elemento de operación de confort acoplado, se pregunta cuál será el idioma del menú (alemán, inglés). A continuación, el elemento de operación de confort ejecuta automáticamente un "Bus-Scan", a fin de identificar el CF conectado. Si se ha identificado el CF, en el display se indican el tipo de convertidor de frecuencia, su estado operativo actual y el estado actual.
Una vez habilitado el convertidor de frecuencia, el modo de indicación cambia a tres valores operativos estándar (frecuencia, tensión, corriente). Los valores operativos actuales indicados pueden seleccionarse de una lista.
Nota: El valor nominal de frecuencia digital está preajustado de fábrica a 0 Hz. Para comprobar si el accionamiento funciona, es preciso introducir un valor nominal de frecuencia mediante
la tecla , o bien una frecuencia de punteo (P113). Los ajustes deben ser realizados exclusivamente por personal cualificado, observando estrictamente los avisos de seguridad y las advertencias.
ATENCIÓN: ¡Después de pulsar la tecla de INICIO , el accionamiento puede ponerse en marcha inmediatamente!
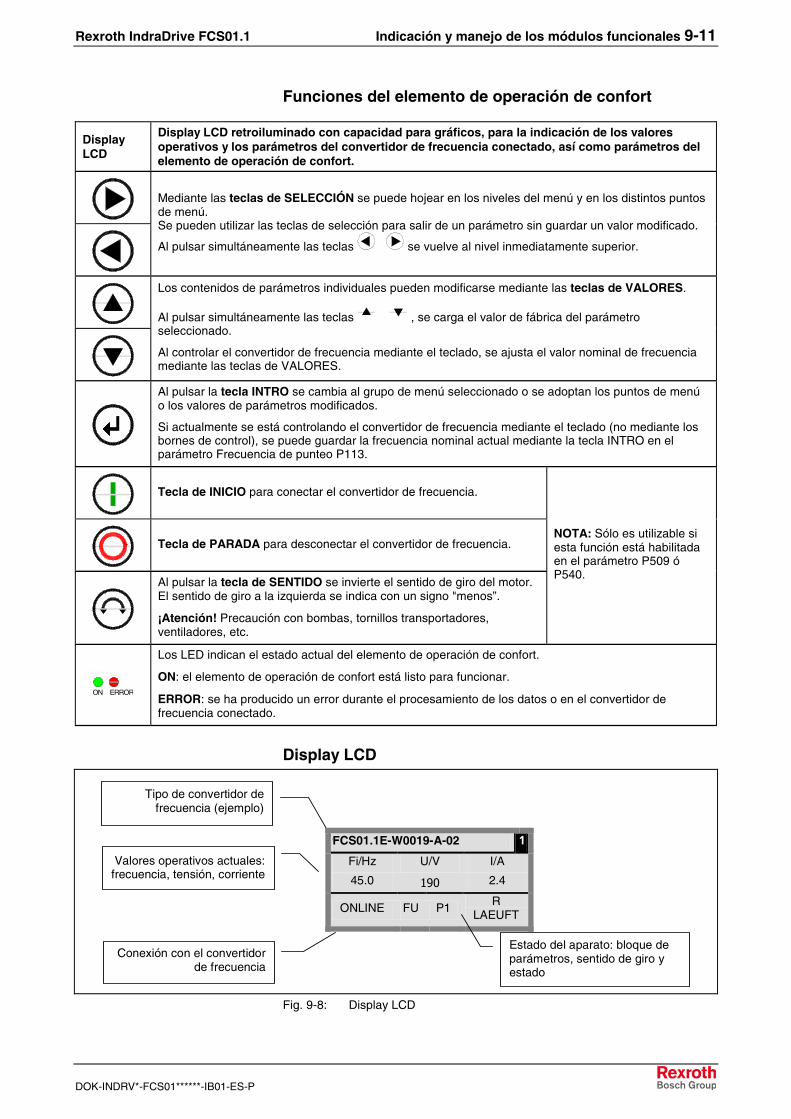
Rexroth IndraDrive FCS01.1 Indicación y manejo de los módulos funcionales 9-11
DOK-INDRV*-FCS01******-IB01-ES-P
Funciones del elemento de operación de confort
Display LCD
Display LCD retroiluminado con capacidad para gráficos, para la indicación de los valores operativos y los parámetros del convertidor de frecuencia conectado, así como parámetros del elemento de operación de confort.
Mediante las teclas de SELECCIÓN se puede hojear en los niveles del menú y en los distintos puntos de menú. Se pueden utilizar las teclas de selección para salir de un parámetro sin guardar un valor modificado.
Al pulsar simultáneamente las teclas se vuelve al nivel inmediatamente superior.
Los contenidos de parámetros individuales pueden modificarse mediante las teclas de VALORES.
Al pulsar simultáneamente las teclas , se carga el valor de fábrica del parámetro seleccionado.
Al controlar el convertidor de frecuencia mediante el teclado, se ajusta el valor nominal de frecuencia mediante las teclas de VALORES.
Al pulsar la tecla INTRO se cambia al grupo de menú seleccionado o se adoptan los puntos de menú o los valores de parámetros modificados.
Si actualmente se está controlando el convertidor de frecuencia mediante el teclado (no mediante los bornes de control), se puede guardar la frecuencia nominal actual mediante la tecla INTRO en el parámetro Frecuencia de punteo P113.
Tecla de INICIO para conectar el convertidor de frecuencia.
Tecla de PARADA para desconectar el convertidor de frecuencia.
Al pulsar la tecla de SENTIDO se invierte el sentido de giro del motor. El sentido de giro a la izquierda se indica con un signo "menos”.
¡Atención! Precaución con bombas, tornillos transportadores, ventiladores, etc.
NOTA: Sólo es utilizable si esta función está habilitada en el parámetro P509 ó P540.
ON ERROR
Los LED indican el estado actual del elemento de operación de confort.
ON: el elemento de operación de confort está listo para funcionar.
ERROR: se ha producido un error durante el procesamiento de los datos o en el convertidor de frecuencia conectado.
Display LCD
Tipo de convertidor de frecuencia (ejemplo)
Valores operativos actuales: frecuencia, tensión, corriente
FCS01.1E-W0019-A-02 1
Fi/Hz U/V I/A
45.0 190 2.4
ONLINE FU P1 R LAEUFT
Estado del aparato: bloque de parámetros, sentido de giro y estado
Conexión con el convertidor de frecuencia
Fig. 9-8: Display LCD
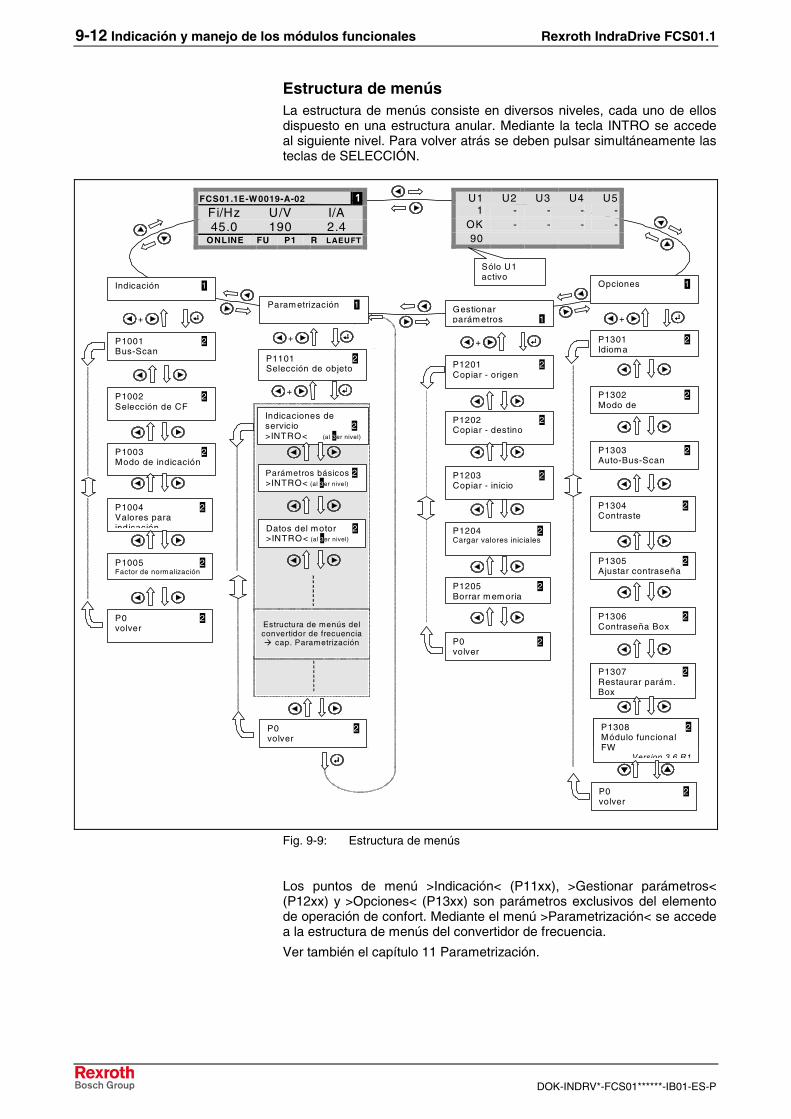
9-12 Indicación y manejo de los módulos funcionales Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Estructura de menús La estructura de menús consiste en diversos niveles, cada uno de ellos dispuesto en una estructura anular. Mediante la tecla INTRO se accede al siguiente nivel. Para volver atrás se deben pulsar simultáneamente las teclas de SELECCIÓN.
Gestionar parám etros 1
P1201 2Copiar - origen
P1202 2Copiar - destino
P1204 2Cargar valores iniciales
P1203 2Copiar - inicio
P1205 2Borrar m em oria
P0 2volver
Indicación 1
P1001 2 Bus-Scan
P1002 2 Selección de CF
P1004 2 Valores para indicación
P1003 2 Modo de indicación
P1005 2 Factor de normalización
P0 2 volver
Opciones 1
P1301 2Idiom a
P1302 2Modo de
P1304 2Contraste
P1303 2Auto-Bus-Scan
P1305 2Ajustar contraseña
P1306 2Contraseña Box
P0 zurück
FCS01.1E-W0019-A-02 1Fi/Hz U/V I/A 45.0 190 2.4
ONLINE FU P1 R LAEUFT
U1 U2 U3 U4 U5 1 - - - -
OK - - - - 90
P1307 2Restaurar parám. Box
P0 2volver
P0 zurück P1308 2Módulo funcional FW
Version 3 6 R1
Parámetros básicos 2>INTRO< (al 3er nivel)
P0 2volver
Estructura de menús del convertidor de frecuencia
cap. Parametrización
Datos del motor 2>INTRO< (al 3er nivel)
Indicaciones de servicio 2 >INTRO< (al 3er nivel)
P1101 2Selección de objeto
+ +
+
+
+
Param etrización 1
Sólo U1 activo
Fig. 9-9: Estructura de menús
Los puntos de menú >Indicación< (P11xx), >Gestionar parámetros< (P12xx) y >Opciones< (P13xx) son parámetros exclusivos del elemento de operación de confort. Mediante el menú >Parametrización< se accede a la estructura de menús del convertidor de frecuencia.
Ver también el capítulo 11 Parametrización.
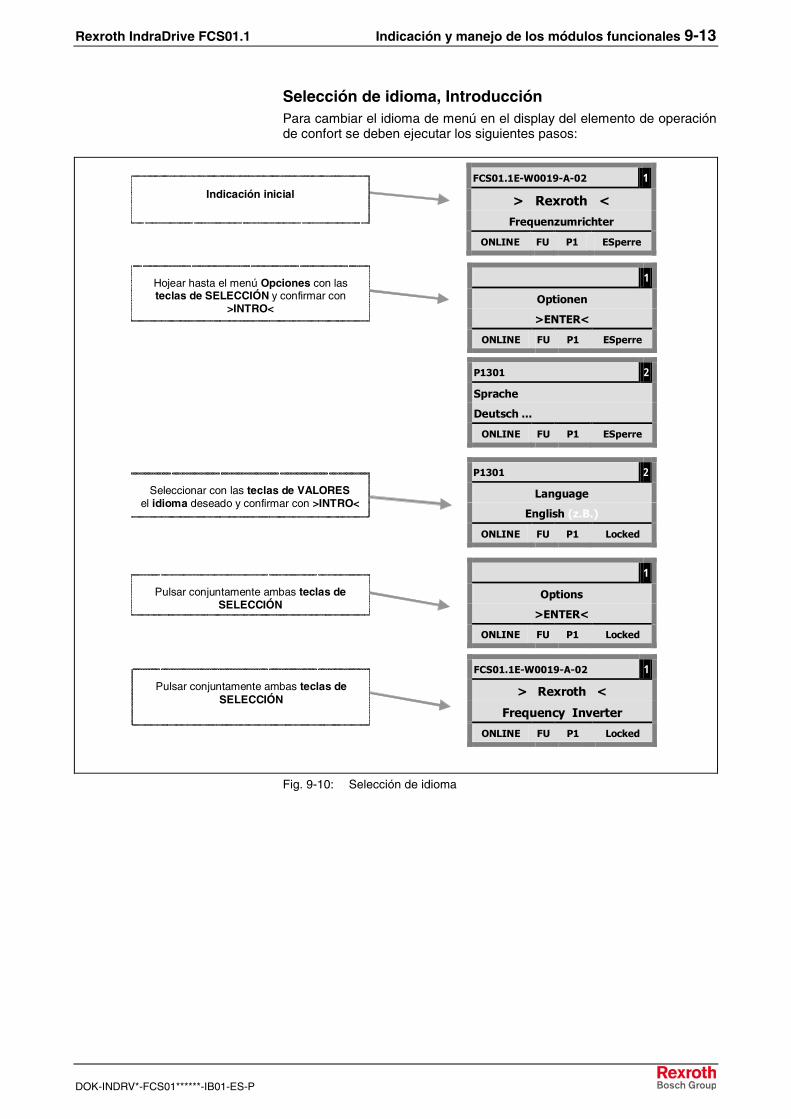
Rexroth IndraDrive FCS01.1 Indicación y manejo de los módulos funcionales 9-13
DOK-INDRV*-FCS01******-IB01-ES-P
Selección de idioma, Introducción Para cambiar el idioma de menú en el display del elemento de operación de confort se deben ejecutar los siguientes pasos:
Hojear hasta el menú Opciones con las teclas de SELECCIÓN y confirmar con
>INTRO<
FCS01.1E-W0019-A-02 1
> Rexroth < Frequenzumrichter
ONLINE FU P1 ESperre
1
Optionen
>ENTER<
ONLINE FU P1 ESperre
P1301 2
Sprache
Deutsch ...
ONLINE FU P1 ESperre
Seleccionar con las teclas de VALORES el idioma deseado y confirmar con >INTRO<
P1301 2
Language
English (z.B.)
ONLINE FU P1 Locked
Pulsar conjuntamente ambas teclas de SELECCIÓN
1
Options
>ENTER<
ONLINE FU P1 Locked
FCS01.1E-W0019-A-02 1
> Rexroth <
Frequency Inverter
ONLINE FU P1 Locked
Pulsar conjuntamente ambas teclas de SELECCIÓN
Indicación inicial
Fig. 9-10: Selección de idioma
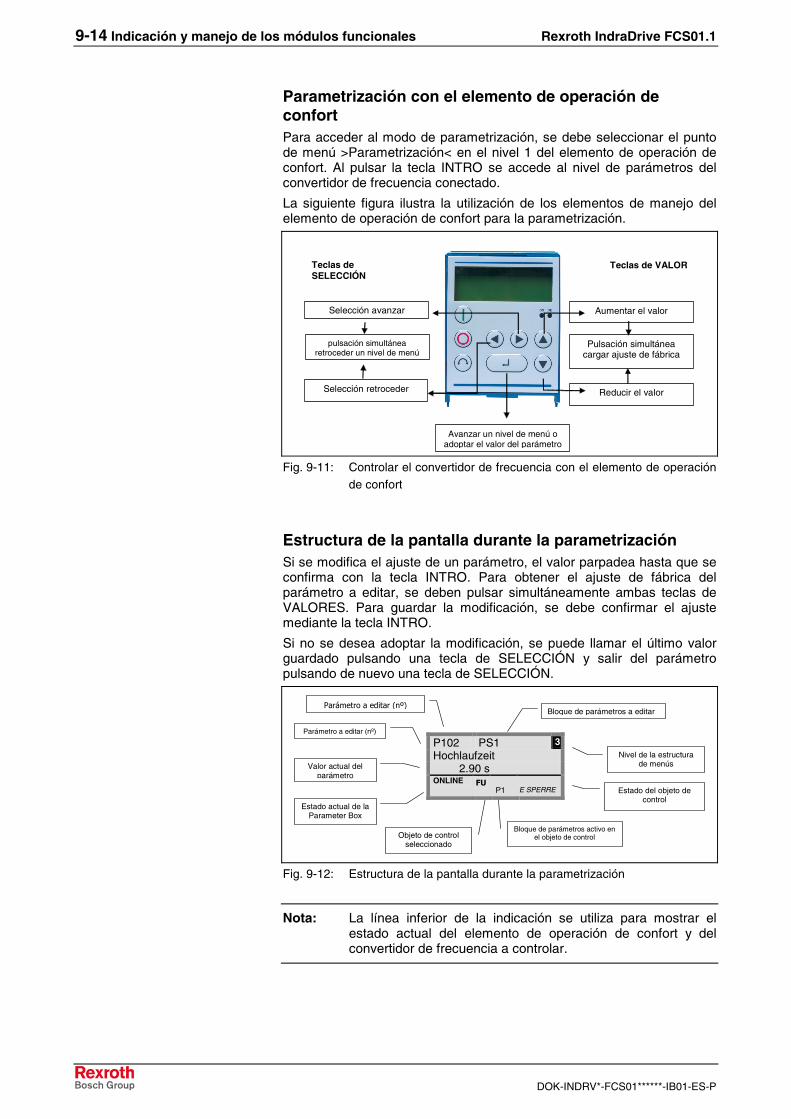
9-14 Indicación y manejo de los módulos funcionales Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Parametrización con el elemento de operación de confort Para acceder al modo de parametrización, se debe seleccionar el punto de menú >Parametrización< en el nivel 1 del elemento de operación de confort. Al pulsar la tecla INTRO se accede al nivel de parámetros del convertidor de frecuencia conectado.
La siguiente figura ilustra la utilización de los elementos de manejo del elemento de operación de confort para la parametrización.
Aumentar el valor
Pulsación simultánea cargar ajuste de fábrica
Avanzar un nivel de menú o adoptar el valor del parámetro
Reducir el valor Selección retroceder
pulsación simultánea retroceder un nivel de menú
Selección avanzar
Teclas de SELECCIÓN
Teclas de VALOR
Fig. 9-11: Controlar el convertidor de frecuencia con el elemento de operación
de confort
Estructura de la pantalla durante la parametrización Si se modifica el ajuste de un parámetro, el valor parpadea hasta que se confirma con la tecla INTRO. Para obtener el ajuste de fábrica del parámetro a editar, se deben pulsar simultáneamente ambas teclas de VALORES. Para guardar la modificación, se debe confirmar el ajuste mediante la tecla INTRO.
Si no se desea adoptar la modificación, se puede llamar el último valor guardado pulsando una tecla de SELECCIÓN y salir del parámetro pulsando de nuevo una tecla de SELECCIÓN.
Nivel de la estructura de menús
Bloque de parámetros a editarParámetro a editar (nº)
Parámetro a editar (nº)
Valor actual del parámetro
Estado actual de la Parameter Box
Objeto de control seleccionado
Bloque de parámetros activo en el objeto de control
Estado del objeto de control
P102 PS1 3 Hochlaufzeit 2.90 s ONLINE FU
P1 E SPERRE
Fig. 9-12: Estructura de la pantalla durante la parametrización
Nota: La línea inferior de la indicación se utiliza para mostrar el estado actual del elemento de operación de confort y del convertidor de frecuencia a controlar.
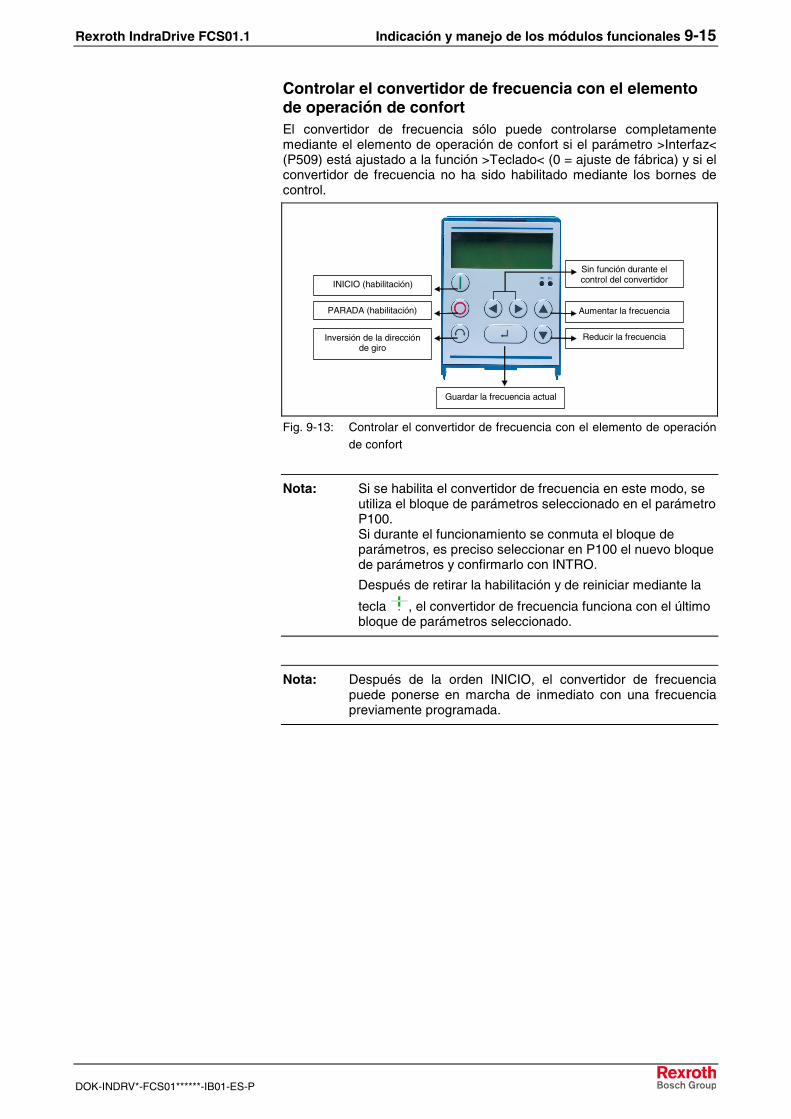
Rexroth IndraDrive FCS01.1 Indicación y manejo de los módulos funcionales 9-15
DOK-INDRV*-FCS01******-IB01-ES-P
Controlar el convertidor de frecuencia con el elemento de operación de confort El convertidor de frecuencia sólo puede controlarse completamente mediante el elemento de operación de confort si el parámetro >Interfaz< (P509) está ajustado a la función >Teclado< (0 = ajuste de fábrica) y si el convertidor de frecuencia no ha sido habilitado mediante los bornes de control.
Sin función durante el control del convertidor
Aumentar la frecuencia
Guardar la frecuencia actual
Reducir la frecuencia
PARADA (habilitación)
Inversión de la dirección de giro
INICIO (habilitación)
Fig. 9-13: Controlar el convertidor de frecuencia con el elemento de operación
de confort
Nota: Si se habilita el convertidor de frecuencia en este modo, se utiliza el bloque de parámetros seleccionado en el parámetro P100. Si durante el funcionamiento se conmuta el bloque de parámetros, es preciso seleccionar en P100 el nuevo bloque de parámetros y confirmarlo con INTRO.
Después de retirar la habilitación y de reiniciar mediante la
tecla , el convertidor de frecuencia funciona con el último bloque de parámetros seleccionado.
Nota: Después de la orden INICIO, el convertidor de frecuencia puede ponerse en marcha de inmediato con una frecuencia previamente programada.
9-16 Indicación y manejo de los módulos funcionales Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetros del elemento de operación de confort Los grupos de menú tienen asignadas las siguientes funciones principales:
Grupo de menú Nº Función principal
Indicación (P10xx): Selección de los valores operativos y de la estructura de la indicación
Parametrización (P11xx): Programación del convertidor de frecuencia conectado y de todos los objetos de memoria
Gestión de parámetros (P12xx): Copiado y guardado de bloques de parámetros enteros desde objetos de memoria
Opciones (P13xx): Ajuste de las funciones del elemento de operación de confort, así como de todos los procesos automáticos
Fig. 9-14: Funciones principales
Grupo de menú Indicación
Parámetro Valor de ajuste / Descripción / Nota
P1001
Bus-Scan
Mediante este parámetro se inicia un Bus-Scan. Durante el proceso aparece en el display una indicación de progreso.
Después de un Bus-Scan, el parámetro se halla en "Desactivado".
En función del resultado de este proceso, el elemento de operación de confort pasa al modo de funcionamiento "ONLINE" u "OFFLINE".
P1002
Selección de CF
Selección del objeto actual para parametrización/control.
La indicación y las operaciones de manejo en el resto del proceso se refieren al objeto seleccionado. En la lista de selección de los convertidores sólo están disponibles los aparatos identificados durante el Bus-Scan. El objeto actual aparece en la línea de estado.
Gama de valores: FU, S1 ... S5
P1003
Modo de indicación
Selección de la indicación del valor operativo del elemento de operación de confort
Estándar: 3 valores cualesquiera uno junto al otro Lista: 3 valores cualesquiera con unidad uno debajo del otro Indicación en tamaño grande: 1 valor cualquiera con unidad
P1004
Valores para indicación
Selección de un valor de indicación para la indicación del valor real del elemento de operación de confort.
El valor seleccionado se sitúa en la primera posición de una lista interna para los valores de indicación.
Valores reales posibles para la indicación: Frecuencia real Tensión Corriente Número de revoluciones Corriente instantánea Frecuencia nominal Tensión CI Valor real de bus 1
P1005
Factor de normalización
El primer valor de la lista de indicación se multiplica por el factor de normalización. Si este factor de normalización es distinto a "1", en la indicación se deja de mostrar la unidad.
Margen de valores: -327,67 hasta +327,67; resolución 0,01
Rexroth IndraDrive FCS01.1 Indicación y manejo de los módulos funcionales 9-17
DOK-INDRV*-FCS01******-IB01-ES-P
Grupo de menú Parametrización
Parámetro Valor de ajuste / Descripción / Nota
P1101
Selección de objeto
Selección del objeto a parametrizar.
La parametrización en el resto del proceso se refiere al objeto seleccionado. En la lista de selección mostrada sólo están disponibles los aparatos (CF) identificados durante el Bus-Scan y los objetos de memoria (S1…S5).
Nota: ¡Si sólo está conectado un convertidor de frecuencia y no hay ningún espacio de memoria ocupado, este parámetro no aparece!
Gama de valores: FU, S1 ... S5
Grupo de menú Gestión de parámetros
Parámetro Valor de ajuste / Descripción / Nota
P1201
Copiar - origen
Selección del objeto de origen actual para la copia.
En la lista de selección sólo están disponibles los convertidores de frecuencia identificados durante el Bus-Scan y los objetos de memoria.
Gama de valores: FU, S1 ... S5
P1202
Copiar - destino
Selección del objeto de destino actual para la copia.
En la lista de selección sólo están disponibles los convertidores de frecuencia identificados durante el Bus-Scan y los objetos de memoria.
Margen de valores: FU, S1 ... S5
P1203
Copiar - inicio
Mediante este parámetro se inicia el proceso de copia previamente seleccionado. Al sobrescribir datos aparece una ventana de indicación con confirmación. La transmisión se inicia tras la confirmación.
P1204
Cargar valores iniciales
Mediante este parámetro se cargan los datos de fábrica en los parámetros del objeto seleccionado.
Margen de valores: FU, S1 ... S5
P1205
Borrar memoria
Mediante este parámetro se borran los datos del objeto de memoria seleccionado.
Margen de valores: S1 ... S5
9-18 Indicación y manejo de los módulos funcionales Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Grupo de menú Opciones
Parámetro Valor de ajuste / Descripción / Nota
P1301
Idioma
Selección del idioma para el manejo
Idiomas disponibles: alemán, inglés, neerlandés, francés, español, sueco
P1302
Modo de funcionamiento
Selección del modo de funcionamiento
Offline: el elemento de operación de confort se utiliza de forma independiente. No se recurre al bloque de datos del convertidor de frecuencia. Se pueden parametrizar y gestionar los objetos de memoria del elemento de operación de confort.
Online: en la interfaz del elemento de operación de confort se encuentra un convertidor de frecuencia. Se puede parametrizar y controlar el convertidor de frecuencia. Al pasar al modo de funcionamiento "ONLINE" se inicia automáticamente un Bus-Scan.
P1303
Auto- Bus- Scan
Ajuste del comportamiento de encendido.
Desactivado: no se ejecuta un Bus- Scan; al encenderlo de nuevo, se buscan los convertidores de frecuencia conectados antes del apagado.
Activado: al encender el elemento de operación de confort se ejecuta automáticamente un Bus-Scan.
P1304
Contraste
Ajuste del contraste del display
Margen de valores: 0% ... 100%; resolución 1%
P1305
Ajustar contraseña
El usuario puede asignar una contraseña en este parámetro.
Si se ha asignado una contraseña, no se pueden modificar parámetros.
P1306
Contraseña elemento de operación
Si se deben modificar parámetros estando activa la contraseña, se debe emplear la contraseña ajustada en el parámetro P1305.
P1307
Restaurar parámetro del elemento de operación
Mediante este parámetro se puede restaurar el elemento de operación de confort al ajuste de fábrica. Se borran todos los ajustes y los datos en los objetos de memoria.
P1308 Versión de software
Indica la versión de software del elemento de operación de confort. Se ruega mantenerlo a mano en caso necesario.
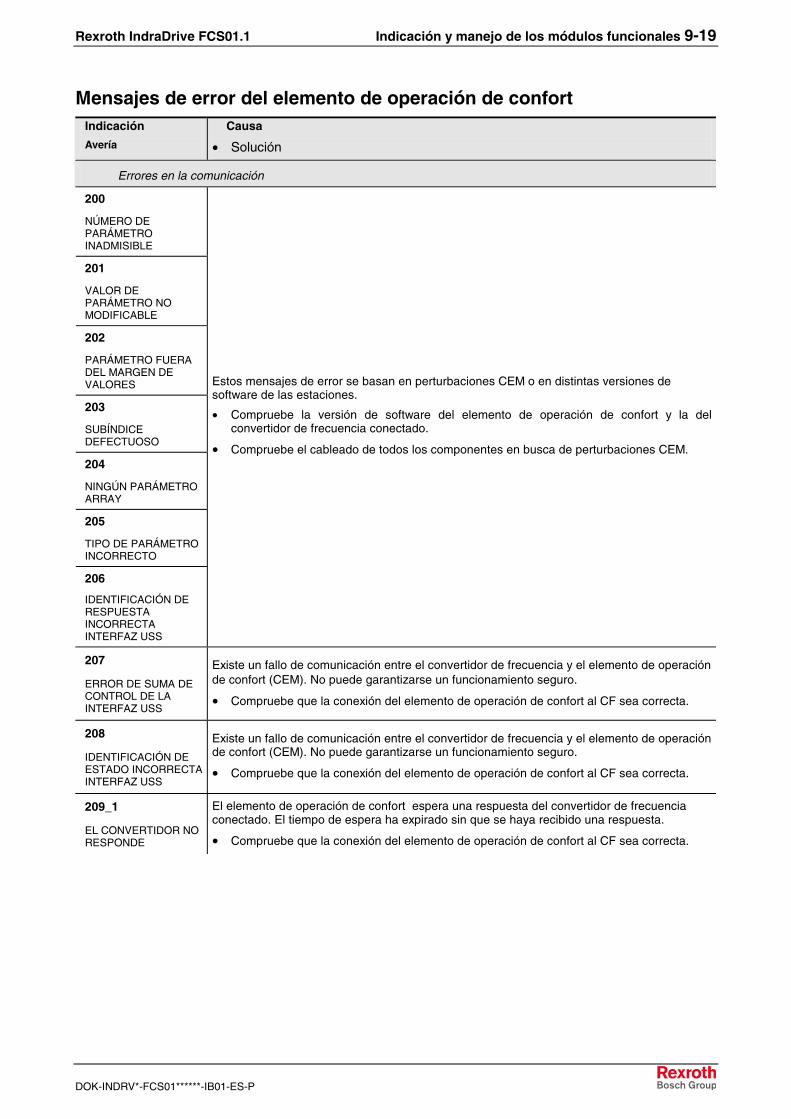
Rexroth IndraDrive FCS01.1 Indicación y manejo de los módulos funcionales 9-19
DOK-INDRV*-FCS01******-IB01-ES-P
Mensajes de error del elemento de operación de confort Indicación
Avería Causa
• Solución
Errores en la comunicación
200
NÚMERO DE PARÁMETRO INADMISIBLE
201
VALOR DE PARÁMETRO NO MODIFICABLE
202
PARÁMETRO FUERA DEL MARGEN DE VALORES
203
SUBÍNDICE DEFECTUOSO
204
NINGÚN PARÁMETRO ARRAY
205
TIPO DE PARÁMETRO INCORRECTO
206
IDENTIFICACIÓN DE RESPUESTA INCORRECTA INTERFAZ USS
Estos mensajes de error se basan en perturbaciones CEM o en distintas versiones de software de las estaciones.
• Compruebe la versión de software del elemento de operación de confort y la del convertidor de frecuencia conectado.
• Compruebe el cableado de todos los componentes en busca de perturbaciones CEM.
207
ERROR DE SUMA DE CONTROL DE LA INTERFAZ USS
Existe un fallo de comunicación entre el convertidor de frecuencia y el elemento de operación de confort (CEM). No puede garantizarse un funcionamiento seguro.
• Compruebe que la conexión del elemento de operación de confort al CF sea correcta.
208
IDENTIFICACIÓN DE ESTADO INCORRECTA INTERFAZ USS
Existe un fallo de comunicación entre el convertidor de frecuencia y el elemento de operación de confort (CEM). No puede garantizarse un funcionamiento seguro.
• Compruebe que la conexión del elemento de operación de confort al CF sea correcta.
209_1
EL CONVERTIDOR NO RESPONDE
El elemento de operación de confort espera una respuesta del convertidor de frecuencia conectado. El tiempo de espera ha expirado sin que se haya recibido una respuesta.
• Compruebe que la conexión del elemento de operación de confort al CF sea correcta.
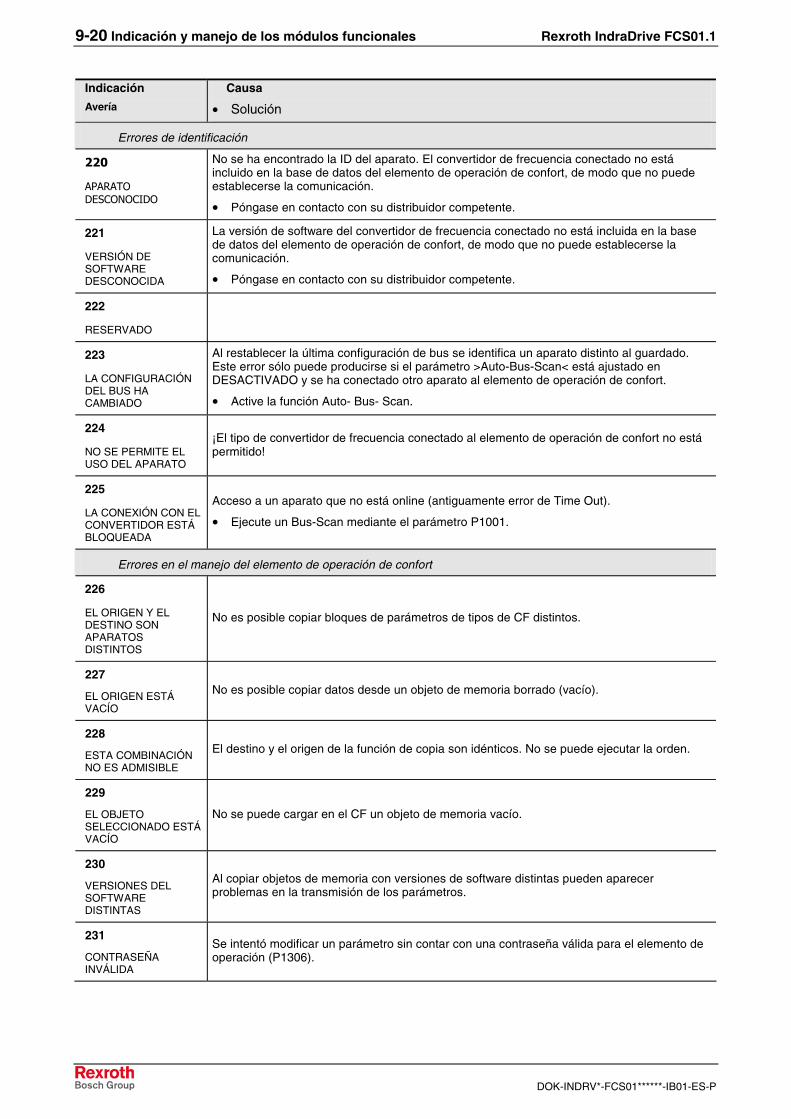
9-20 Indicación y manejo de los módulos funcionales Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Indicación
Avería Causa
• Solución
Errores de identificación
220
APARATO DESCONOCIDO
No se ha encontrado la ID del aparato. El convertidor de frecuencia conectado no está incluido en la base de datos del elemento de operación de confort, de modo que no puede establecerse la comunicación.
• Póngase en contacto con su distribuidor competente.
221
VERSIÓN DE SOFTWARE DESCONOCIDA
La versión de software del convertidor de frecuencia conectado no está incluida en la base de datos del elemento de operación de confort, de modo que no puede establecerse la comunicación.
• Póngase en contacto con su distribuidor competente.
222
RESERVADO
223
LA CONFIGURACIÓN DEL BUS HA CAMBIADO
Al restablecer la última configuración de bus se identifica un aparato distinto al guardado. Este error sólo puede producirse si el parámetro >Auto-Bus-Scan< está ajustado en DESACTIVADO y se ha conectado otro aparato al elemento de operación de confort.
• Active la función Auto- Bus- Scan.
224
NO SE PERMITE EL USO DEL APARATO
¡El tipo de convertidor de frecuencia conectado al elemento de operación de confort no está permitido!
225
LA CONEXIÓN CON EL CONVERTIDOR ESTÁ BLOQUEADA
Acceso a un aparato que no está online (antiguamente error de Time Out).
• Ejecute un Bus-Scan mediante el parámetro P1001.
Errores en el manejo del elemento de operación de confort
226
EL ORIGEN Y EL DESTINO SON APARATOS DISTINTOS
No es posible copiar bloques de parámetros de tipos de CF distintos.
227
EL ORIGEN ESTÁ VACÍO
No es posible copiar datos desde un objeto de memoria borrado (vacío).
228
ESTA COMBINACIÓN NO ES ADMISIBLE
El destino y el origen de la función de copia son idénticos. No se puede ejecutar la orden.
229
EL OBJETO SELECCIONADO ESTÁ VACÍO
No se puede cargar en el CF un objeto de memoria vacío.
230
VERSIONES DEL SOFTWARE DISTINTAS
Al copiar objetos de memoria con versiones de software distintas pueden aparecer problemas en la transmisión de los parámetros.
231
CONTRASEÑA INVÁLIDA
Se intentó modificar un parámetro sin contar con una contraseña válida para el elemento de operación (P1306).
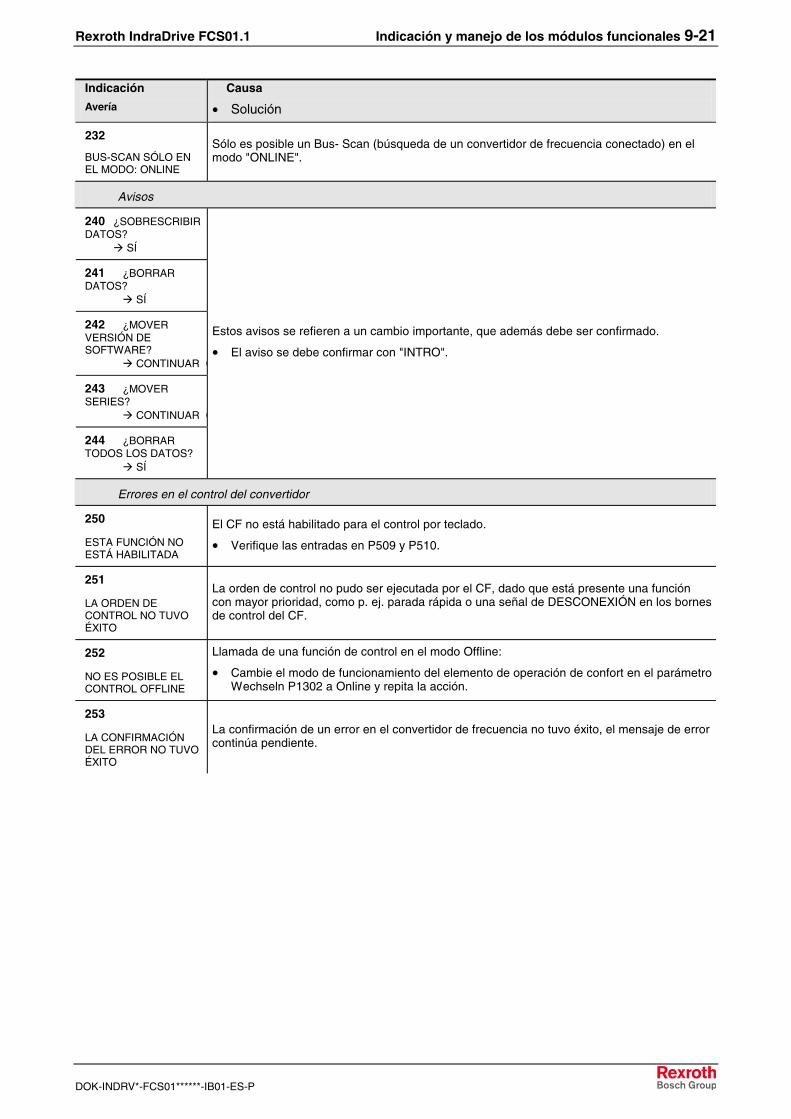
Rexroth IndraDrive FCS01.1 Indicación y manejo de los módulos funcionales 9-21
DOK-INDRV*-FCS01******-IB01-ES-P
Indicación
Avería Causa
• Solución
232
BUS-SCAN SÓLO EN EL MODO: ONLINE
Sólo es posible un Bus- Scan (búsqueda de un convertidor de frecuencia conectado) en el modo "ONLINE".
Avisos
240 ¿SOBRESCRIBIR DATOS? SÍ
241 ¿BORRAR DATOS? SÍ
242 ¿MOVER VERSIÓN DE SOFTWARE? CONTINUAR C
243 ¿MOVER SERIES? CONTINUAR C
244 ¿BORRAR TODOS LOS DATOS? SÍ
Estos avisos se refieren a un cambio importante, que además debe ser confirmado.
• El aviso se debe confirmar con "INTRO".
Errores en el control del convertidor
250
ESTA FUNCIÓN NO ESTÁ HABILITADA
El CF no está habilitado para el control por teclado.
• Verifique las entradas en P509 y P510.
251
LA ORDEN DE CONTROL NO TUVO ÉXITO
La orden de control no pudo ser ejecutada por el CF, dado que está presente una función con mayor prioridad, como p. ej. parada rápida o una señal de DESCONEXIÓN en los bornes de control del CF.
252
NO ES POSIBLE EL CONTROL OFFLINE
Llamada de una función de control en el modo Offline:
• Cambie el modo de funcionamiento del elemento de operación de confort en el parámetro Wechseln P1302 a Online y repita la acción.
253
LA CONFIRMACIÓN DEL ERROR NO TUVO ÉXITO
La confirmación de un error en el convertidor de frecuencia no tuvo éxito, el mensaje de error continúa pendiente.
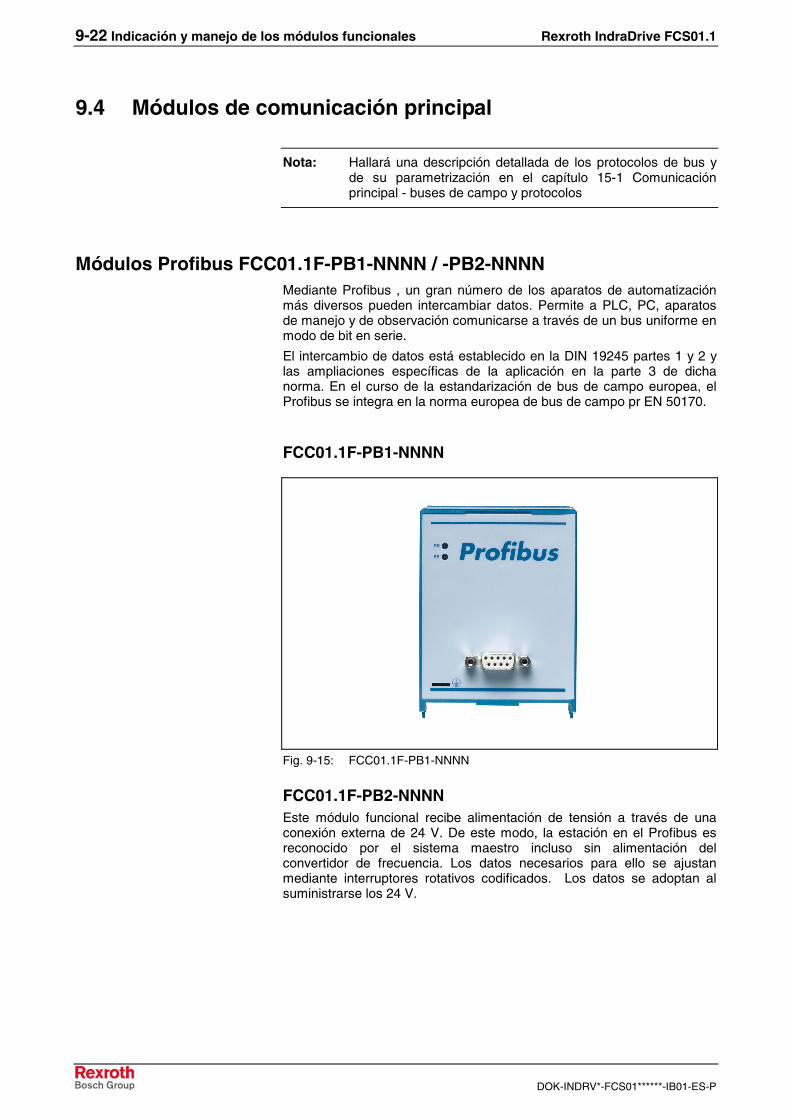
9-22 Indicación y manejo de los módulos funcionales Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
9.4 Módulos de comunicación principal
Nota: Hallará una descripción detallada de los protocolos de bus y de su parametrización en el capítulo 15-1 Comunicación principal - buses de campo y protocolos
Módulos Profibus FCC01.1F-PB1-NNNN / -PB2-NNNN Mediante Profibus , un gran número de los aparatos de automatización más diversos pueden intercambiar datos. Permite a PLC, PC, aparatos de manejo y de observación comunicarse a través de un bus uniforme en modo de bit en serie.
El intercambio de datos está establecido en la DIN 19245 partes 1 y 2 y las ampliaciones específicas de la aplicación en la parte 3 de dicha norma. En el curso de la estandarización de bus de campo europea, el Profibus se integra en la norma europea de bus de campo pr EN 50170.
FCC01.1F-PB1-NNNN
Fig. 9-15: FCC01.1F-PB1-NNNN
FCC01.1F-PB2-NNNN Este módulo funcional recibe alimentación de tensión a través de una conexión externa de 24 V. De este modo, la estación en el Profibus es reconocido por el sistema maestro incluso sin alimentación del convertidor de frecuencia. Los datos necesarios para ello se ajustan mediante interruptores rotativos codificados. Los datos se adoptan al suministrarse los 24 V.
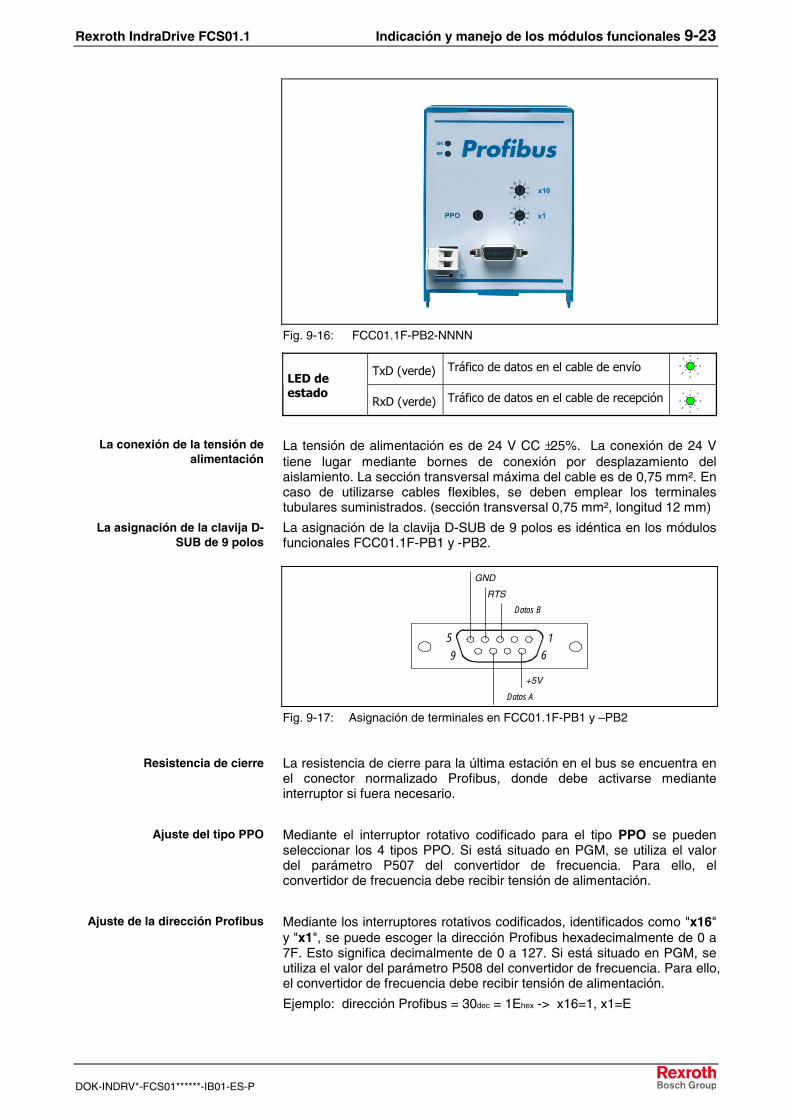
Rexroth IndraDrive FCS01.1 Indicación y manejo de los módulos funcionales 9-23
DOK-INDRV*-FCS01******-IB01-ES-P
Fig. 9-16: FCC01.1F-PB2-NNNN
TxD (verde) Tráfico de datos en el cable de envío LED de estado
RxD (verde) Tráfico de datos en el cable de recepción
La tensión de alimentación es de 24 V CC ±25%. La conexión de 24 V tiene lugar mediante bornes de conexión por desplazamiento del aislamiento. La sección transversal máxima del cable es de 0,75 mm². En caso de utilizarse cables flexibles, se deben emplear los terminales tubulares suministrados. (sección transversal 0,75 mm², longitud 12 mm)
La asignación de la clavija D-SUB de 9 polos es idéntica en los módulos funcionales FCC01.1F-PB1 y -PB2.
Fig. 9-17: Asignación de terminales en FCC01.1F-PB1 y –PB2
La resistencia de cierre para la última estación en el bus se encuentra en el conector normalizado Profibus, donde debe activarse mediante interruptor si fuera necesario.
Mediante el interruptor rotativo codificado para el tipo PPO se pueden seleccionar los 4 tipos PPO. Si está situado en PGM, se utiliza el valor del parámetro P507 del convertidor de frecuencia. Para ello, el convertidor de frecuencia debe recibir tensión de alimentación.
Mediante los interruptores rotativos codificados, identificados como "x16" y "x1", se puede escoger la dirección Profibus hexadecimalmente de 0 a 7F. Esto significa decimalmente de 0 a 127. Si está situado en PGM, se utiliza el valor del parámetro P508 del convertidor de frecuencia. Para ello, el convertidor de frecuencia debe recibir tensión de alimentación.
Ejemplo: dirección Profibus = 30dec = 1Ehex -> x16=1, x1=E
La conexión de la tensión de alimentación
La asignación de la clavija D-SUB de 9 polos
Resistencia de cierre
Ajuste del tipo PPO
Ajuste de la dirección Profibus
GND RTS
6
1 5
9
+5V
Datos A
Datos B
9-24 Indicación y manejo de los módulos funcionales Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Nota: Los ajustes mediante los interruptores rotativos codificados no se transfieren al convertidor de frecuencia.
Si se utiliza el tipo de cable A, se dan las siguientes extensiones longitudinales de un segmento de bus:
Velocidad de transmisión [kbit / s] Longitud máx. del cable [m]
9,6 1200
19,2 1200
45,45 1200
93,75 1200
187,5 1000
500 400
1500 200
3000 100
6000 100
12000 100
Fig. 9-18: Velocidad de transmisión
Nota: Sólo si se respetan los parámetros de cable establecidos se pueden mantener sin problemas las velocidades de transmisión y las distancias de transmisión garantizadas.
Estructura del cable
Especificación del cable
Tipo de cable A según EN 50 170
Estructura del cable Cable de dos hilos retorcido, como mínimo con apantallado simple (ver especificación para RS 485)
Tipo de cable recomendado
Impedancia característica: 135 ... 165 Ω capacidad eléctrica < 30 pF / m resistencia de bucle 110 Ω / km diámetro del conductor 0,64 mm sección transversal del conductor > 0,34mm²
Apantallamiento mín. simple necesario; aplicado por ambos lados;
Cableado, distancias y apantallamiento de cableado
dentro y fuera de armarios de distribución mín. a 20 cm de otros cables con tensiones > 60V;
Fig. 9-19: Requisitos del cable de bus
Nota: El apantallamiento del cable debe ser conectado a la tierra funcional (normalmente la placa de montaje eléctricamente conductora), a fin de evitar perturbaciones CEM en el aparato.
Para ello, en el módulo funcional FCC01.1F-PBx se debe unir en el conector Profibus el apantallamiento del cable a la carcasa metálica del conector D-SUB y de la tierra funcional cubriendo una gran superficie.
Velocidad de transmisión
Requisitos del cable de bus
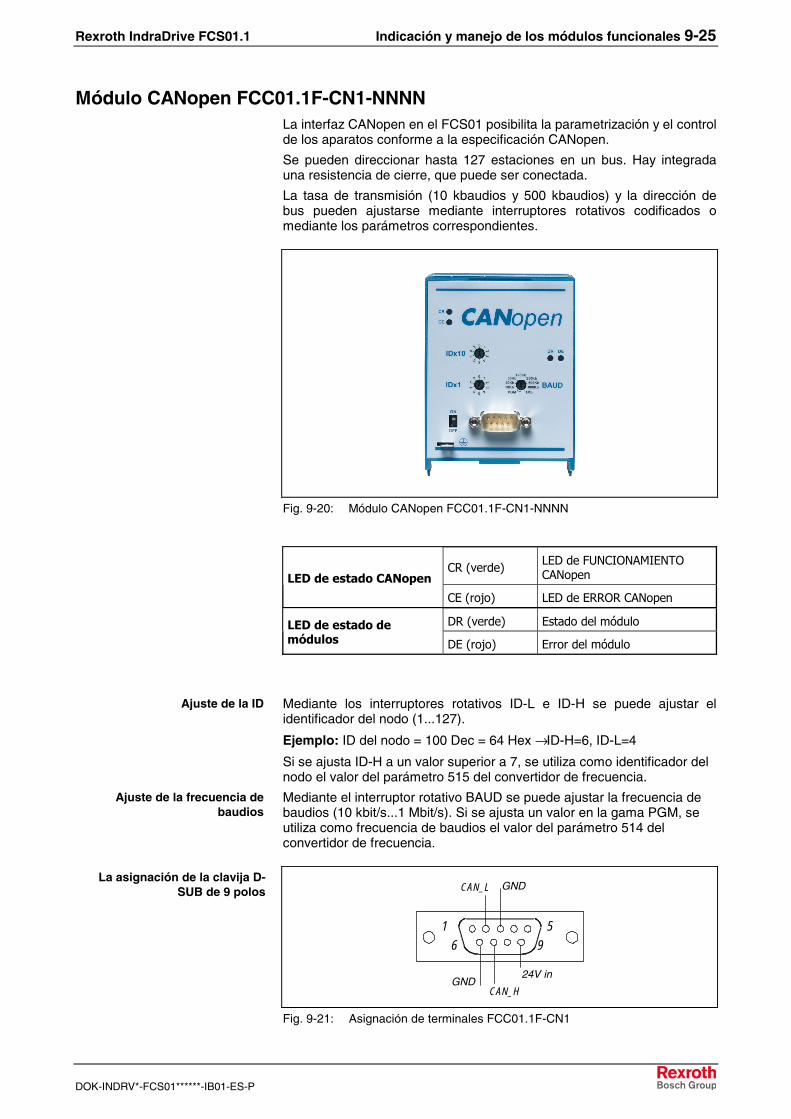
Rexroth IndraDrive FCS01.1 Indicación y manejo de los módulos funcionales 9-25
DOK-INDRV*-FCS01******-IB01-ES-P
Módulo CANopen FCC01.1F-CN1-NNNN La interfaz CANopen en el FCS01 posibilita la parametrización y el control de los aparatos conforme a la especificación CANopen.
Se pueden direccionar hasta 127 estaciones en un bus. Hay integrada una resistencia de cierre, que puede ser conectada.
La tasa de transmisión (10 kbaudios y 500 kbaudios) y la dirección de bus pueden ajustarse mediante interruptores rotativos codificados o mediante los parámetros correspondientes.
Fig. 9-20: Módulo CANopen FCC01.1F-CN1-NNNN
CR (verde) LED de FUNCIONAMIENTO CANopen LED de estado CANopen
CE (rojo) LED de ERROR CANopen
DR (verde) Estado del módulo LED de estado de módulos DE (rojo) Error del módulo
Mediante los interruptores rotativos ID-L e ID-H se puede ajustar el identificador del nodo (1...127).
Ejemplo: ID del nodo = 100 Dec = 64 Hex → ID-H=6, ID-L=4
Si se ajusta ID-H a un valor superior a 7, se utiliza como identificador del nodo el valor del parámetro 515 del convertidor de frecuencia.
Mediante el interruptor rotativo BAUD se puede ajustar la frecuencia de baudios (10 kbit/s...1 Mbit/s). Si se ajusta un valor en la gama PGM, se utiliza como frecuencia de baudios el valor del parámetro 514 del convertidor de frecuencia.
GND CAN_L
6
1 5
9
GND CAN_H
24V in
Fig. 9-21: Asignación de terminales FCC01.1F-CN1
Ajuste de la ID
Ajuste de la frecuencia de baudios
La asignación de la clavija D-SUB de 9 polos
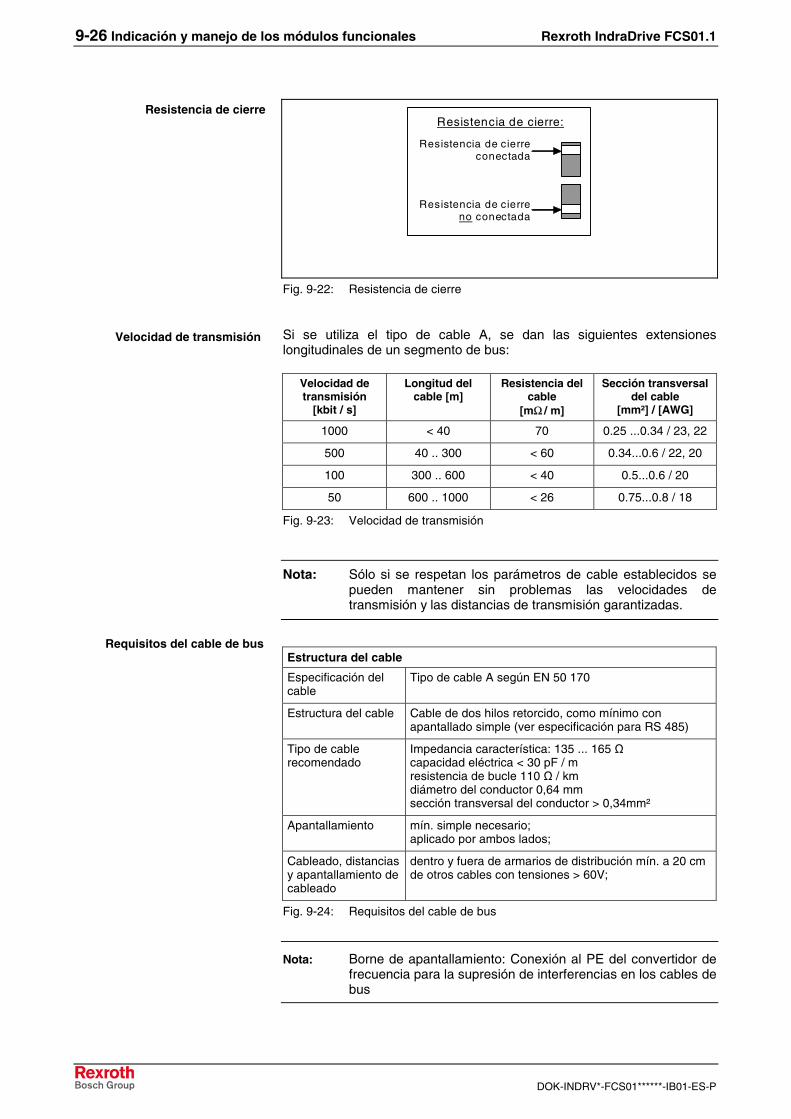
9-26 Indicación y manejo de los módulos funcionales Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Resistencia de cierre:
Resistencia de cierre conectada
Resistencia de cierre no conectada
Fig. 9-22: Resistencia de cierre
Si se utiliza el tipo de cable A, se dan las siguientes extensiones longitudinales de un segmento de bus:
Velocidad de transmisión
[kbit / s]
Longitud del cable [m]
Resistencia del cable
[mΩ / m]
Sección transversal del cable
[mm²] / [AWG]
1000 < 40 70 0.25 ...0.34 / 23, 22
500 40 .. 300 < 60 0.34...0.6 / 22, 20
100 300 .. 600 < 40 0.5...0.6 / 20
50 600 .. 1000 < 26 0.75...0.8 / 18
Fig. 9-23: Velocidad de transmisión
Nota: Sólo si se respetan los parámetros de cable establecidos se pueden mantener sin problemas las velocidades de transmisión y las distancias de transmisión garantizadas.
Estructura del cable
Especificación del cable
Tipo de cable A según EN 50 170
Estructura del cable Cable de dos hilos retorcido, como mínimo con apantallado simple (ver especificación para RS 485)
Tipo de cable recomendado
Impedancia característica: 135 ... 165 Ω capacidad eléctrica < 30 pF / m resistencia de bucle 110 Ω / km diámetro del conductor 0,64 mm sección transversal del conductor > 0,34mm²
Apantallamiento mín. simple necesario; aplicado por ambos lados;
Cableado, distancias y apantallamiento de cableado
dentro y fuera de armarios de distribución mín. a 20 cm de otros cables con tensiones > 60V;
Fig. 9-24: Requisitos del cable de bus
Nota: Borne de apantallamiento: Conexión al PE del convertidor de frecuencia para la supresión de interferencias en los cables de bus
Resistencia de cierre
Velocidad de transmisión
Requisitos del cable de bus
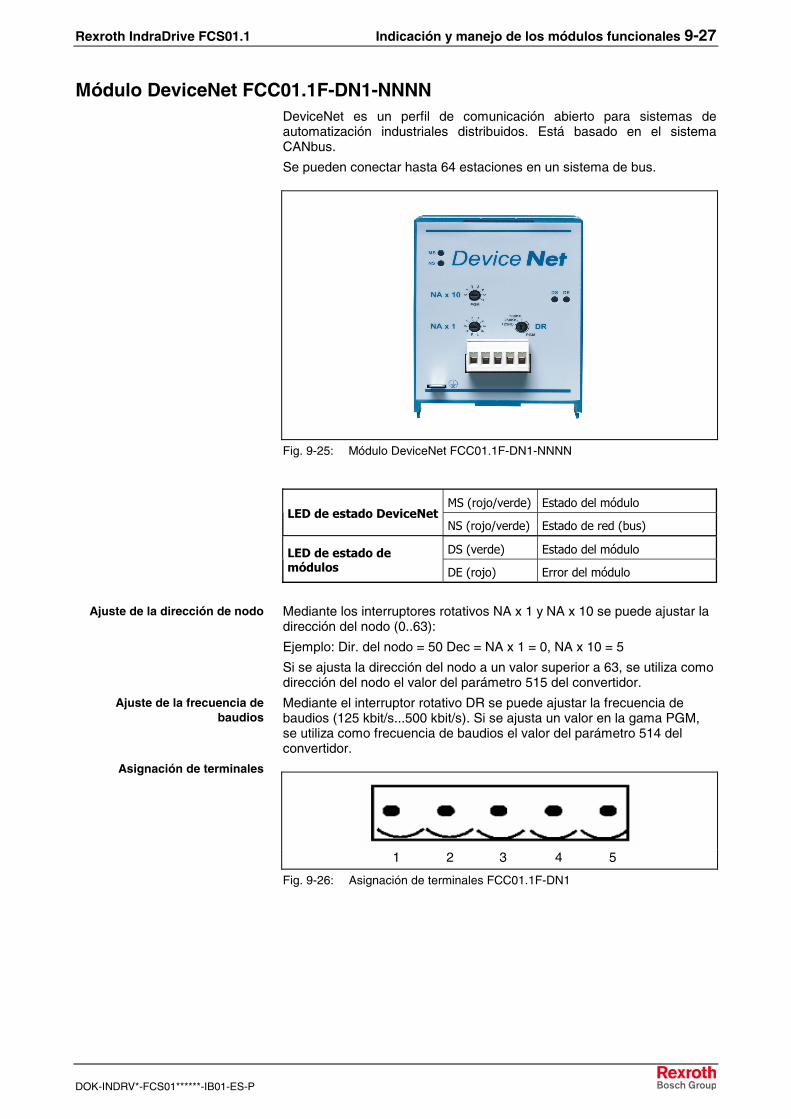
Rexroth IndraDrive FCS01.1 Indicación y manejo de los módulos funcionales 9-27
DOK-INDRV*-FCS01******-IB01-ES-P
Módulo DeviceNet FCC01.1F-DN1-NNNN DeviceNet es un perfil de comunicación abierto para sistemas de automatización industriales distribuidos. Está basado en el sistema CANbus.
Se pueden conectar hasta 64 estaciones en un sistema de bus.
Fig. 9-25: Módulo DeviceNet FCC01.1F-DN1-NNNN
MS (rojo/verde) Estado del módulo LED de estado DeviceNet
NS (rojo/verde) Estado de red (bus)
DS (verde) Estado del módulo LED de estado de módulos DE (rojo) Error del módulo
Mediante los interruptores rotativos NA x 1 y NA x 10 se puede ajustar la dirección del nodo (0..63):
Ejemplo: Dir. del nodo = 50 Dec = NA x 1 = 0, NA x 10 = 5
Si se ajusta la dirección del nodo a un valor superior a 63, se utiliza como dirección del nodo el valor del parámetro 515 del convertidor.
Mediante el interruptor rotativo DR se puede ajustar la frecuencia de baudios (125 kbit/s...500 kbit/s). Si se ajusta un valor en la gama PGM, se utiliza como frecuencia de baudios el valor del parámetro 514 del convertidor.
1 2 3 4 5
Fig. 9-26: Asignación de terminales FCC01.1F-DN1
Ajuste de la dirección de nodo
Ajuste de la frecuencia de baudios
Asignación de terminales
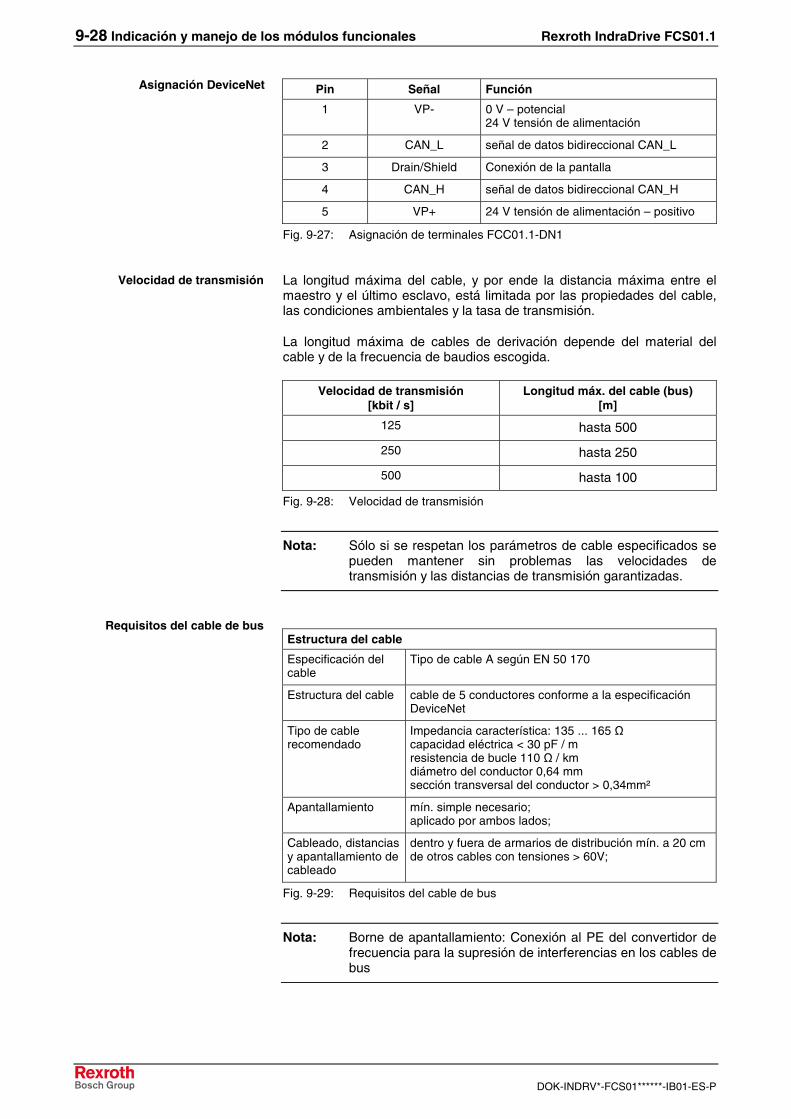
9-28 Indicación y manejo de los módulos funcionales Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Pin Señal Función
1 VP- 0 V – potencial 24 V tensión de alimentación
2 CAN_L señal de datos bidireccional CAN_L
3 Drain/Shield Conexión de la pantalla
4 CAN_H señal de datos bidireccional CAN_H
5 VP+ 24 V tensión de alimentación – positivo
Fig. 9-27: Asignación de terminales FCC01.1-DN1
La longitud máxima del cable, y por ende la distancia máxima entre el maestro y el último esclavo, está limitada por las propiedades del cable, las condiciones ambientales y la tasa de transmisión. La longitud máxima de cables de derivación depende del material del cable y de la frecuencia de baudios escogida.
Velocidad de transmisión [kbit / s]
Longitud máx. del cable (bus) [m]
125 hasta 500
250 hasta 250
500 hasta 100
Fig. 9-28: Velocidad de transmisión
Nota: Sólo si se respetan los parámetros de cable especificados se pueden mantener sin problemas las velocidades de transmisión y las distancias de transmisión garantizadas.
Estructura del cable
Especificación del cable
Tipo de cable A según EN 50 170
Estructura del cable cable de 5 conductores conforme a la especificación DeviceNet
Tipo de cable recomendado
Impedancia característica: 135 ... 165 Ω capacidad eléctrica < 30 pF / m resistencia de bucle 110 Ω / km diámetro del conductor 0,64 mm sección transversal del conductor > 0,34mm²
Apantallamiento mín. simple necesario; aplicado por ambos lados;
Cableado, distancias y apantallamiento de cableado
dentro y fuera de armarios de distribución mín. a 20 cm de otros cables con tensiones > 60V;
Fig. 9-29: Requisitos del cable de bus
Nota: Borne de apantallamiento: Conexión al PE del convertidor de frecuencia para la supresión de interferencias en los cables de bus
Asignación DeviceNet
Velocidad de transmisión
Requisitos del cable de bus
Rexroth IndraDrive FCS01.1 Puesta en marcha 10-1
DOK-INDRV*-FCS01******-IB01-ES-P
10 Puesta en marcha Al conectar la alimentación de tensión al convertidor de frecuencia, éste está listo para funcionar al cabo de unos instantes. En este estado, el convertidor de frecuencia se puede ajustar a los requisitos de la aplicación, esto es, se puede parametrizar. En el capítulo 11 Parametrización se describe cada parámetro de forma exhaustiva y completa.
No se debe poner el motor en marcha mediante una señal de habilitación hasta que se hayan ajustado los parámetros por parte de personal cualificado.
AVISO
⇒ El convertidor de frecuencia no está equipado con
un interruptor principal de red, y por lo tanto se halla siempre bajo tensión cuando está conectado a la tensión de red. En consecuencia, también puede haber tensión en un motor conectado.
10.1 Ajustes básicos
Todos los convertidores de frecuencia suministrados por Bosch Rexroth están preprogramados en su ajuste de fábrica para aplicaciones estándar con motores estándar DS de 4 polos (con la misma potencia y tensión). En caso de utilizarse motores con otra potencia o número de polos, se deben introducir los datos de la placa de características del motor en los parámetros P201...P207 del grupo de menú >Datos del motor<.
Nota: Todos los datos del motor pueden preajustarse mediante el parámetro P200. ¡Una vez utilizada esta función, se vuelve a ajustar el parámetro a 0 = ningún cambio! Los datos se cargan una vez automáticamente en los parámetros P201...P209, donde pueden ser comparados de nuevo con los datos de la placa de características del motor.
RECOMENDACIÓN: Para asegurar el funcionamiento impecable de la unidad de accionamiento, es necesario ajustar los datos del motor con la mayor exactitud posible, conforme a la placa de características. Es especialmente recomendable una medición automática de la resistencia del estator mediante el parámetro P220.
Para determinar automáticamente la resistencia del estator, se debe ajustar P220 = 1 y, a continuación, confirmar con "INTRO". El valor (dependiente de P207) convertido a la resistencia de fase se guarda en el parámetro P208.
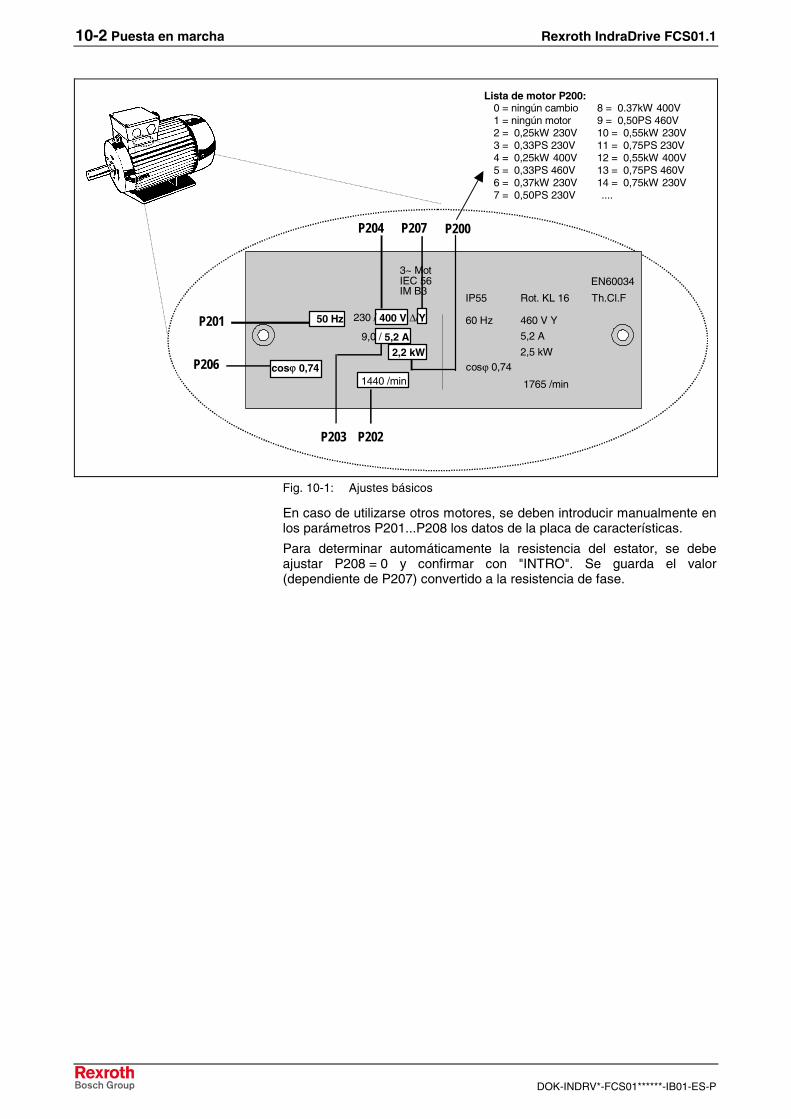
10-2 Puesta en marcha Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
3~ Mot IEC 56 IM B3
cosϕ 0,74 cosϕ 0,74
IP55 Rot. KL 16 Th.Cl.F
EN60034
60 Hz 460 V Y
5,2 A
2,5 kW
1765 /min
1440 /min
P206
P201
P204
P203 P202
P200
9,0 / 5,2 A
50 Hz
2,2 kW
P207
Lista de motor P200: 0 = ningún cambio 8 = 0.37kW 400V
1 = ningún motor 9 = 0,50PS 460V 2 = 0,25kW 230V 10 = 0,55kW 230V 3 = 0,33PS 230V 11 = 0,75PS 230V 4 = 0,25kW 400V 12 = 0,55kW 400V 5 = 0,33PS 460V 13 = 0,75PS 460V 6 = 0,37kW 230V 14 = 0,75kW 230V 7 = 0,50PS 230V ....
230 / 400 V ∆/Y
Fig. 10-1: Ajustes básicos
En caso de utilizarse otros motores, se deben introducir manualmente en los parámetros P201...P208 los datos de la placa de características.
Para determinar automáticamente la resistencia del estator, se debe ajustar P208 = 0 y confirmar con "INTRO". Se guarda el valor (dependiente de P207) convertido a la resistencia de fase.
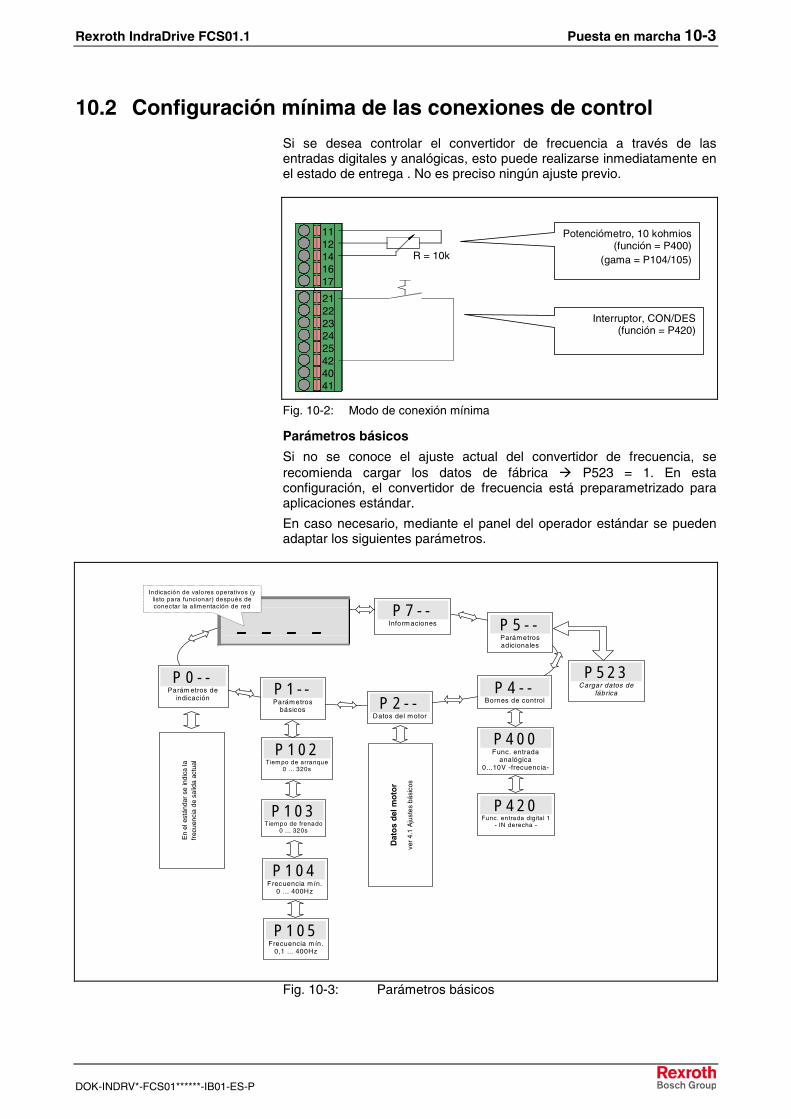
Rexroth IndraDrive FCS01.1 Puesta en marcha 10-3
DOK-INDRV*-FCS01******-IB01-ES-P
10.2 Configuración mínima de las conexiones de control
Si se desea controlar el convertidor de frecuencia a través de las entradas digitales y analógicas, esto puede realizarse inmediatamente en el estado de entrega . No es preciso ningún ajuste previo.
Potenciómetro, 10 kohmios(función = P400)
(gama = P104/105)
Interruptor, CON/DES(función = P420)
11 12 14 16 17
21 22 23 24 25 42 40 41
R = 10k
Fig. 10-2: Modo de conexión mínima
Parámetros básicos
Si no se conoce el ajuste actual del convertidor de frecuencia, se recomienda cargar los datos de fábrica P523 = 1. En esta configuración, el convertidor de frecuencia está preparametrizado para aplicaciones estándar.
En caso necesario, mediante el panel del operador estándar se pueden adaptar los siguientes parámetros.
P 0 - - Parám etros de
indicación
_ _ _ _
P 1 - - Parámetros
básicos P 2 - - Datos del motor
P 4 - - Bornes de control
P 5 - - Parámetros adicionales
P 7 - - Informaciones
E
n el
est
ánda
r se
indi
ca la
fr
ecue
ncia
de
salid
a ac
tual
P 1 0 2 Tiempo de arranque
0 ... 320s
Dat
os
del
mo
tor
ver
4.1
Aju
stes
bás
icos
P 4 0 0 Func. entrada
analógica 0...10V -frecuencia-
Indicación de valores operativos (ylisto para funcionar) después de conectar la alimentación de red
P 1 0 3 Tiempo de frenado
0 ... 320s
P 1 0 4 Frecuencia m ín.
0 ... 400Hz
P 1 0 5 Frecuencia m ín.
0,1 ... 400Hz
P 4 2 0 Func. entrada digital 1
- IN derecha -
P 5 2 3 Cargar datos de
fábrica
Fig. 10-3: Parámetros básicos

10-4 Puesta en marcha Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
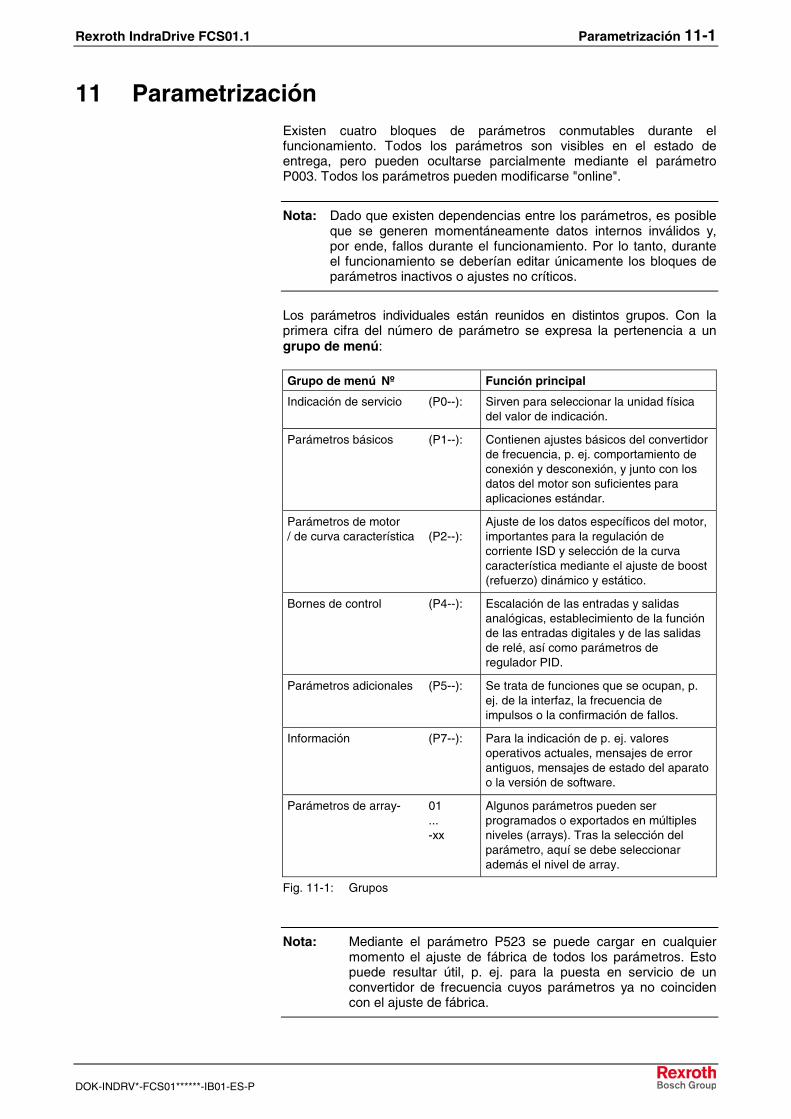
Rexroth IndraDrive FCS01.1 Parametrización 11-1
DOK-INDRV*-FCS01******-IB01-ES-P
11 Parametrización Existen cuatro bloques de parámetros conmutables durante el funcionamiento. Todos los parámetros son visibles en el estado de entrega, pero pueden ocultarse parcialmente mediante el parámetro P003. Todos los parámetros pueden modificarse "online".
Nota: Dado que existen dependencias entre los parámetros, es posible que se generen momentáneamente datos internos inválidos y, por ende, fallos durante el funcionamiento. Por lo tanto, durante el funcionamiento se deberían editar únicamente los bloques de parámetros inactivos o ajustes no críticos.
Los parámetros individuales están reunidos en distintos grupos. Con la primera cifra del número de parámetro se expresa la pertenencia a un grupo de menú:
Grupo de menú Nº Función principal
Indicación de servicio (P0--): Sirven para seleccionar la unidad física del valor de indicación.
Parámetros básicos (P1--): Contienen ajustes básicos del convertidor de frecuencia, p. ej. comportamiento de conexión y desconexión, y junto con los datos del motor son suficientes para aplicaciones estándar.
Parámetros de motor / de curva característica (P2--):
Ajuste de los datos específicos del motor, importantes para la regulación de corriente ISD y selección de la curva característica mediante el ajuste de boost (refuerzo) dinámico y estático.
Bornes de control (P4--): Escalación de las entradas y salidas analógicas, establecimiento de la función de las entradas digitales y de las salidas de relé, así como parámetros de regulador PID.
Parámetros adicionales (P5--): Se trata de funciones que se ocupan, p. ej. de la interfaz, la frecuencia de impulsos o la confirmación de fallos.
Información (P7--): Para la indicación de p. ej. valores operativos actuales, mensajes de error antiguos, mensajes de estado del aparato o la versión de software.
Parámetros de array- 01 ... -xx
Algunos parámetros pueden ser programados o exportados en múltiples niveles (arrays). Tras la selección del parámetro, aquí se debe seleccionar además el nivel de array.
Fig. 11-1: Grupos
Nota: Mediante el parámetro P523 se puede cargar en cualquier momento el ajuste de fábrica de todos los parámetros. Esto puede resultar útil, p. ej. para la puesta en servicio de un convertidor de frecuencia cuyos parámetros ya no coinciden con el ajuste de fábrica.
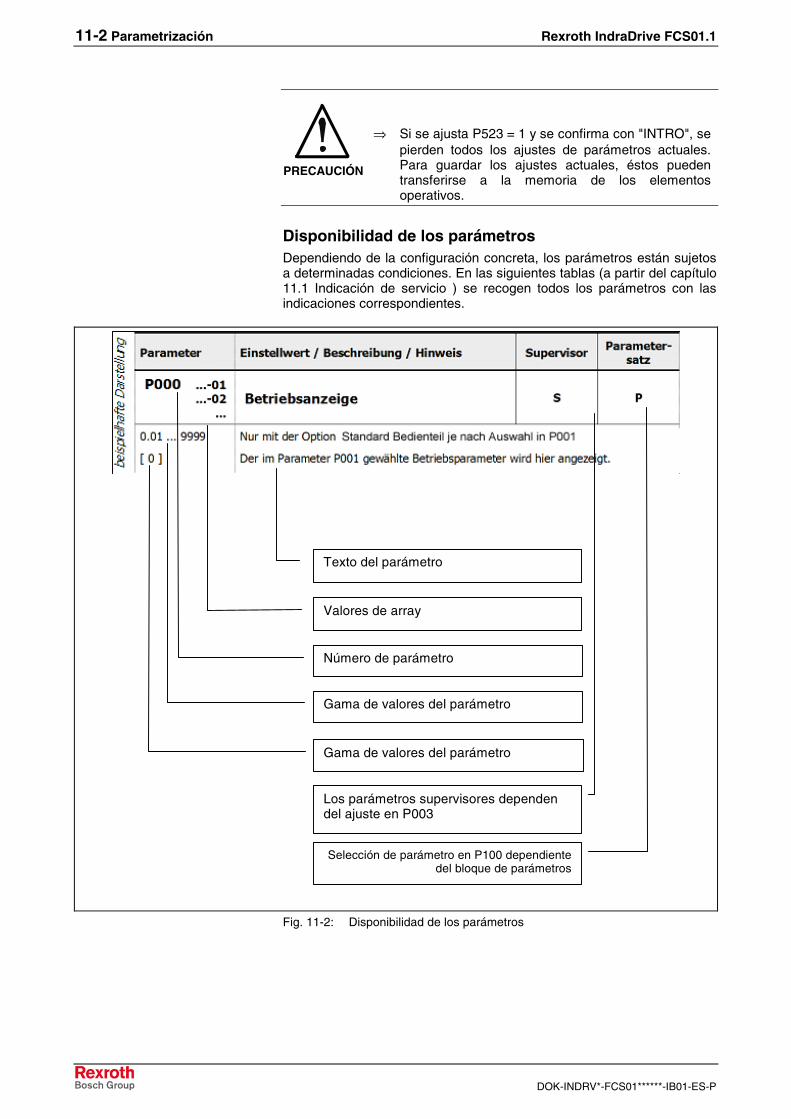
11-2 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
PRECAUCIÓN
⇒ Si se ajusta P523 = 1 y se confirma con "INTRO", se
pierden todos los ajustes de parámetros actuales. Para guardar los ajustes actuales, éstos pueden transferirse a la memoria de los elementos operativos.
Disponibilidad de los parámetros Dependiendo de la configuración concreta, los parámetros están sujetos a determinadas condiciones. En las siguientes tablas (a partir del capítulo 11.1 Indicación de servicio ) se recogen todos los parámetros con las indicaciones correspondientes.
Los parámetros supervisores dependen del ajuste en P003
Número de parámetro
Texto del parámetro
Selección de parámetro en P100 dependiente del bloque de parámetros
Valores de array
Gama de valores del parámetro
Gama de valores del parámetro
Fig. 11-2: Disponibilidad de los parámetros

Rexroth IndraDrive FCS01.1 Parametrización 11-3
DOK-INDRV*-FCS01******-IB01-ES-P
Indicación de parámetros de array Los parámetros P502, P701 hasta 706, P707, P718, P741/742 y P745/746 ofrecen la posibilidad de visualizar ajustes o vistas en varios niveles ("arrays"). Para ello, tras la selección de uno de estos parámetros aparece el nivel de array, el cual debe seleccionarse a su vez.
Si se utiliza el elemento de operación estándar, el nivel de array se indica mediante P - 0 x , mientras que si se utiliza el elemento de operación de confort la posibilidad de selección del nivel de array se muestra en la parte superior derecha del display.
Fig. 11-3: Indicación de parámetros de array (elemento de operación de confort )
P - 0 1 P 5 0 2
P - 0 2
D e s a c tAjuste: Valor función maestra 1
Ajuste: Valor función maestra 2
INTRO INTRO
INTRO
Valor
D e s a c t
Fig. 11-4: Indicación de parámetros de array (elemento de operación estándar )
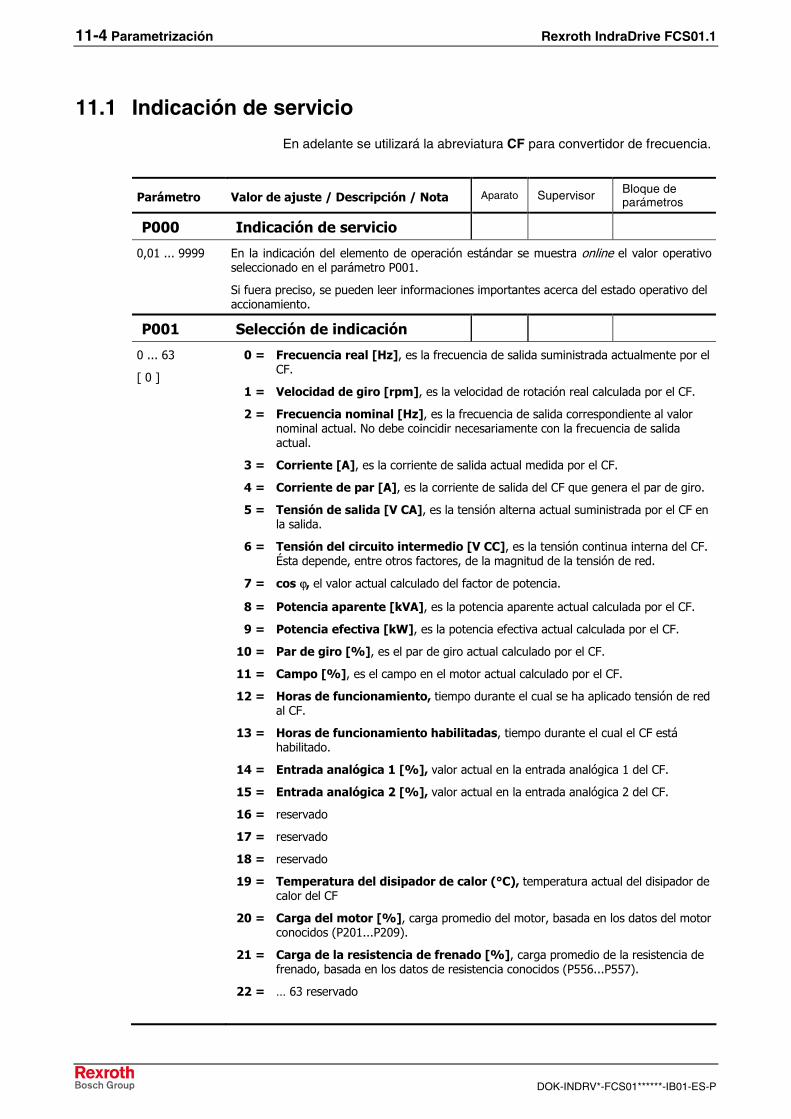
11-4 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
11.1 Indicación de servicio
En adelante se utilizará la abreviatura CF para convertidor de frecuencia.
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de parámetros
P000 Indicación de servicio
0,01 ... 9999 En la indicación del elemento de operación estándar se muestra online el valor operativo seleccionado en el parámetro P001.
Si fuera preciso, se pueden leer informaciones importantes acerca del estado operativo del accionamiento.
P001 Selección de indicación
0 ... 63
[ 0 ]
0 = Frecuencia real [Hz], es la frecuencia de salida suministrada actualmente por el CF.
1 = Velocidad de giro [rpm], es la velocidad de rotación real calculada por el CF.
2 = Frecuencia nominal [Hz], es la frecuencia de salida correspondiente al valor nominal actual. No debe coincidir necesariamente con la frecuencia de salida actual.
3 = Corriente [A], es la corriente de salida actual medida por el CF.
4 = Corriente de par [A], es la corriente de salida del CF que genera el par de giro.
5 = Tensión de salida [V CA], es la tensión alterna actual suministrada por el CF en la salida.
6 = Tensión del circuito intermedio [V CC], es la tensión continua interna del CF. Ésta depende, entre otros factores, de la magnitud de la tensión de red.
7 = cos ϕ, el valor actual calculado del factor de potencia.
8 = Potencia aparente [kVA], es la potencia aparente actual calculada por el CF.
9 = Potencia efectiva [kW], es la potencia efectiva actual calculada por el CF.
10 = Par de giro [%], es el par de giro actual calculado por el CF.
11 = Campo [%], es el campo en el motor actual calculado por el CF.
12 = Horas de funcionamiento, tiempo durante el cual se ha aplicado tensión de red al CF.
13 = Horas de funcionamiento habilitadas, tiempo durante el cual el CF está habilitado.
14 = Entrada analógica 1 [%], valor actual en la entrada analógica 1 del CF.
15 = Entrada analógica 2 [%], valor actual en la entrada analógica 2 del CF.
16 = reservado
17 = reservado
18 = reservado
19 = Temperatura del disipador de calor (°C), temperatura actual del disipador de calor del CF
20 = Carga del motor [%], carga promedio del motor, basada en los datos del motor conocidos (P201...P209).
21 = Carga de la resistencia de frenado [%], carga promedio de la resistencia de frenado, basada en los datos de resistencia conocidos (P556...P557).
22 = … 63 reservado
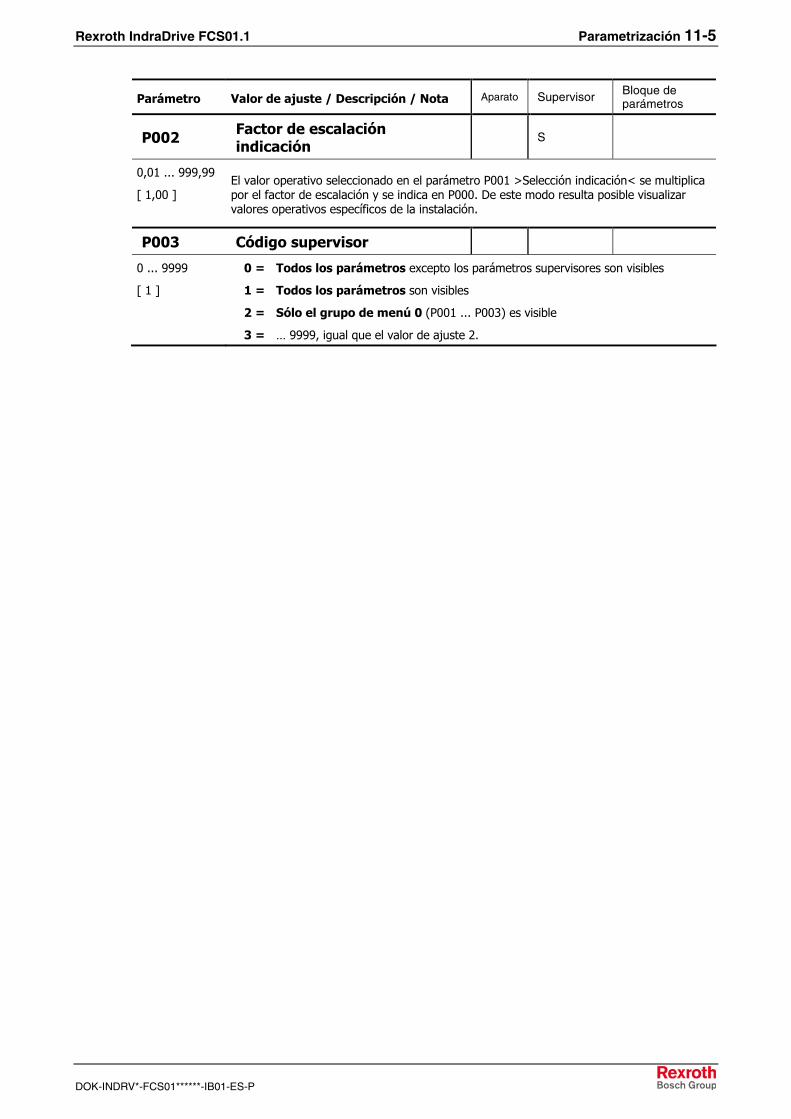
Rexroth IndraDrive FCS01.1 Parametrización 11-5
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de parámetros
P002 Factor de escalación indicación
S
0,01 ... 999,99
[ 1,00 ]
El valor operativo seleccionado en el parámetro P001 >Selección indicación< se multiplica por el factor de escalación y se indica en P000. De este modo resulta posible visualizar valores operativos específicos de la instalación.
P003 Código supervisor
0 ... 9999
[ 1 ]
0 = Todos los parámetros excepto los parámetros supervisores son visibles
1 = Todos los parámetros son visibles
2 = Sólo el grupo de menú 0 (P001 ... P003) es visible
3 = … 9999, igual que el valor de ajuste 2.
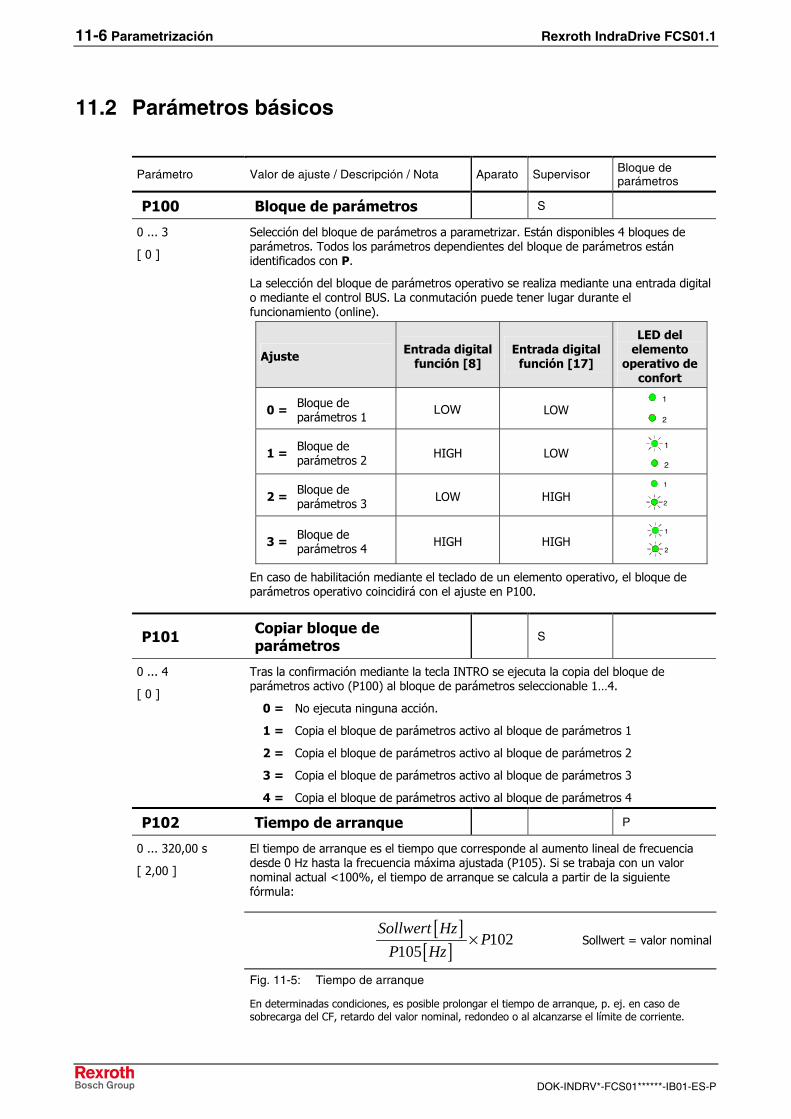
11-6 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
11.2 Parámetros básicos
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de parámetros
P100 Bloque de parámetros S
Selección del bloque de parámetros a parametrizar. Están disponibles 4 bloques de parámetros. Todos los parámetros dependientes del bloque de parámetros están identificados con P.
La selección del bloque de parámetros operativo se realiza mediante una entrada digital o mediante el control BUS. La conmutación puede tener lugar durante el funcionamiento (online).
Ajuste Entrada digitalfunción [8]
Entrada digital función [17]
LED del elemento
operativo de confort
0 = Bloque de
parámetros 1 LOW LOW
1
2
1 = Bloque de
parámetros 2 HIGH LOW 2
1
2 = Bloque de
parámetros 3 LOW HIGH 1
2
3 = Bloque de
parámetros 4 HIGH HIGH 2
1
0 ... 3
[ 0 ]
En caso de habilitación mediante el teclado de un elemento operativo, el bloque de parámetros operativo coincidirá con el ajuste en P100.
P101 Copiar bloque de parámetros
S
0 ... 4
[ 0 ]
Tras la confirmación mediante la tecla INTRO se ejecuta la copia del bloque de parámetros activo (P100) al bloque de parámetros seleccionable 1…4.
0 = No ejecuta ninguna acción.
1 = Copia el bloque de parámetros activo al bloque de parámetros 1
2 = Copia el bloque de parámetros activo al bloque de parámetros 2
3 = Copia el bloque de parámetros activo al bloque de parámetros 3
4 = Copia el bloque de parámetros activo al bloque de parámetros 4
P102 Tiempo de arranque P
0 ... 320,00 s
[ 2,00 ] El tiempo de arranque es el tiempo que corresponde al aumento lineal de frecuencia desde 0 Hz hasta la frecuencia máxima ajustada (P105). Si se trabaja con un valor nominal actual <100%, el tiempo de arranque se calcula a partir de la siguiente fórmula:
[ ][ ] 102
105
Sollwert HzP
P Hz× Sollwert = valor nominal
Fig. 11-5: Tiempo de arranque
En determinadas condiciones, es posible prolongar el tiempo de arranque, p. ej. en caso de sobrecarga del CF, retardo del valor nominal, redondeo o al alcanzarse el límite de corriente.
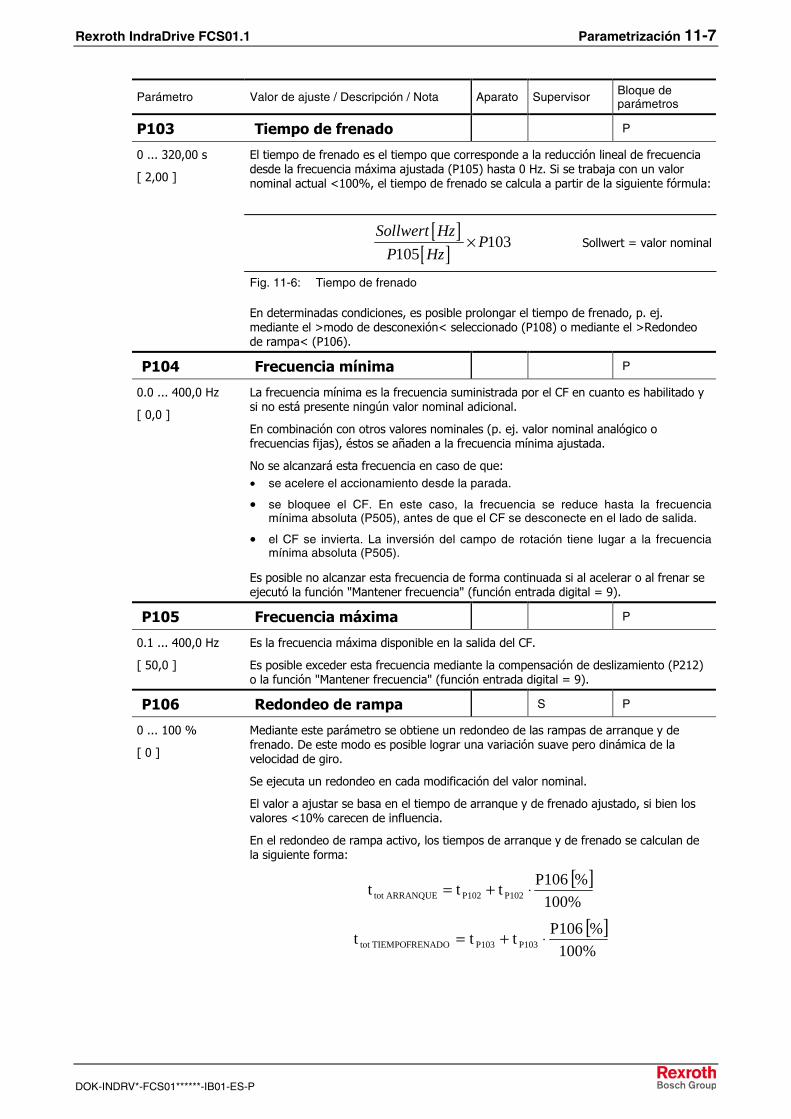
Rexroth IndraDrive FCS01.1 Parametrización 11-7
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de parámetros
P103 Tiempo de frenado P
0 ... 320,00 s
[ 2,00 ] El tiempo de frenado es el tiempo que corresponde a la reducción lineal de frecuencia desde la frecuencia máxima ajustada (P105) hasta 0 Hz. Si se trabaja con un valor nominal actual <100%, el tiempo de frenado se calcula a partir de la siguiente fórmula:
[ ][ ] 103
105
Sollwert HzP
P Hz× Sollwert = valor nominal
Fig. 11-6: Tiempo de frenado
En determinadas condiciones, es posible prolongar el tiempo de frenado, p. ej. mediante el >modo de desconexión< seleccionado (P108) o mediante el >Redondeo de rampa< (P106).
P104 Frecuencia mínima P
0.0 ... 400,0 Hz
[ 0,0 ] La frecuencia mínima es la frecuencia suministrada por el CF en cuanto es habilitado y si no está presente ningún valor nominal adicional.
En combinación con otros valores nominales (p. ej. valor nominal analógico o frecuencias fijas), éstos se añaden a la frecuencia mínima ajustada.
No se alcanzará esta frecuencia en caso de que: • se acelere el accionamiento desde la parada.
• se bloquee el CF. En este caso, la frecuencia se reduce hasta la frecuencia mínima absoluta (P505), antes de que el CF se desconecte en el lado de salida.
• el CF se invierta. La inversión del campo de rotación tiene lugar a la frecuencia mínima absoluta (P505).
Es posible no alcanzar esta frecuencia de forma continuada si al acelerar o al frenar se ejecutó la función "Mantener frecuencia" (función entrada digital = 9).
P105 Frecuencia máxima P
0.1 ... 400,0 Hz
[ 50,0 ] Es la frecuencia máxima disponible en la salida del CF.
Es posible exceder esta frecuencia mediante la compensación de deslizamiento (P212) o la función "Mantener frecuencia" (función entrada digital = 9).
P106 Redondeo de rampa S P
0 ... 100 %
[ 0 ] Mediante este parámetro se obtiene un redondeo de las rampas de arranque y de frenado. De este modo es posible lograr una variación suave pero dinámica de la velocidad de giro.
Se ejecuta un redondeo en cada modificación del valor nominal.
El valor a ajustar se basa en el tiempo de arranque y de frenado ajustado, si bien los valores <10% carecen de influencia.
En el redondeo de rampa activo, los tiempos de arranque y de frenado se calculan de la siguiente forma:
[ ]100%
% P106ttt P102P102ARRANQUEtot ⋅+=
[ ]100%
% P106ttt P103P103FRENADOTIEMPOtot ⋅+=
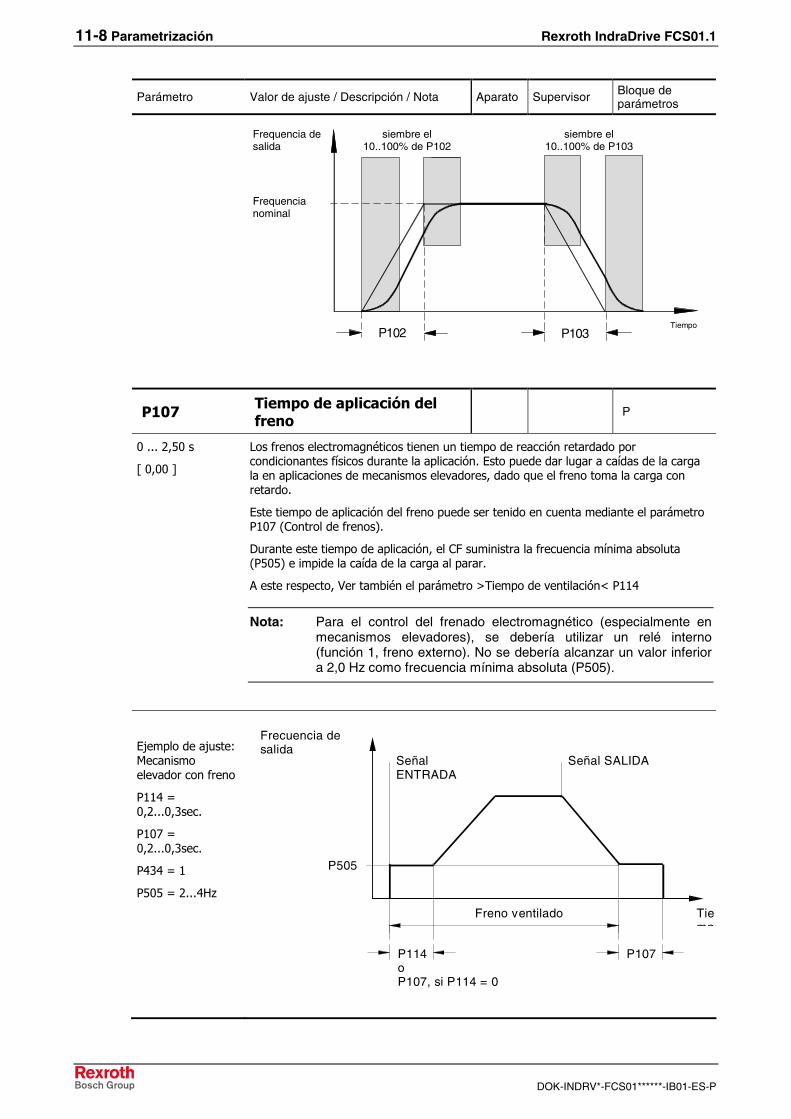
11-8 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de parámetros
Ausgangs-
frequenzjeweils10 - 100% von P102
ZeitP102 P103
jeweils10 - 100% von P103
Sollfrequenz
P107 Tiempo de aplicación del freno
P
0 ... 2,50 s
[ 0,00 ] Los frenos electromagnéticos tienen un tiempo de reacción retardado por condicionantes físicos durante la aplicación. Esto puede dar lugar a caídas de la carga la en aplicaciones de mecanismos elevadores, dado que el freno toma la carga con retardo.
Este tiempo de aplicación del freno puede ser tenido en cuenta mediante el parámetro P107 (Control de frenos).
Durante este tiempo de aplicación, el CF suministra la frecuencia mínima absoluta (P505) e impide la caída de la carga al parar.
A este respecto, Ver también el parámetro >Tiempo de ventilación< P114
Nota: Para el control del frenado electromagnético (especialmente en mecanismos elevadores), se debería utilizar un relé interno (función 1, freno externo). No se debería alcanzar un valor inferior a 2,0 Hz como frecuencia mínima absoluta (P505).
Ejemplo de ajuste:Mecanismo elevador con freno
P114 = 0,2...0,3sec.
P107 = 0,2...0,3sec.
P434 = 1
P505 = 2...4Hz
Frecuencia de salida
P107
Freno ventilado
P114 o P107, si P114 = 0
Señal ENTRADA
P505
Señal SALIDA
Tiempo
Tiempo
Frequencia de salida
Frequencia nominal
siembre el 10..100% de P102
siembre el 10..100% de P103
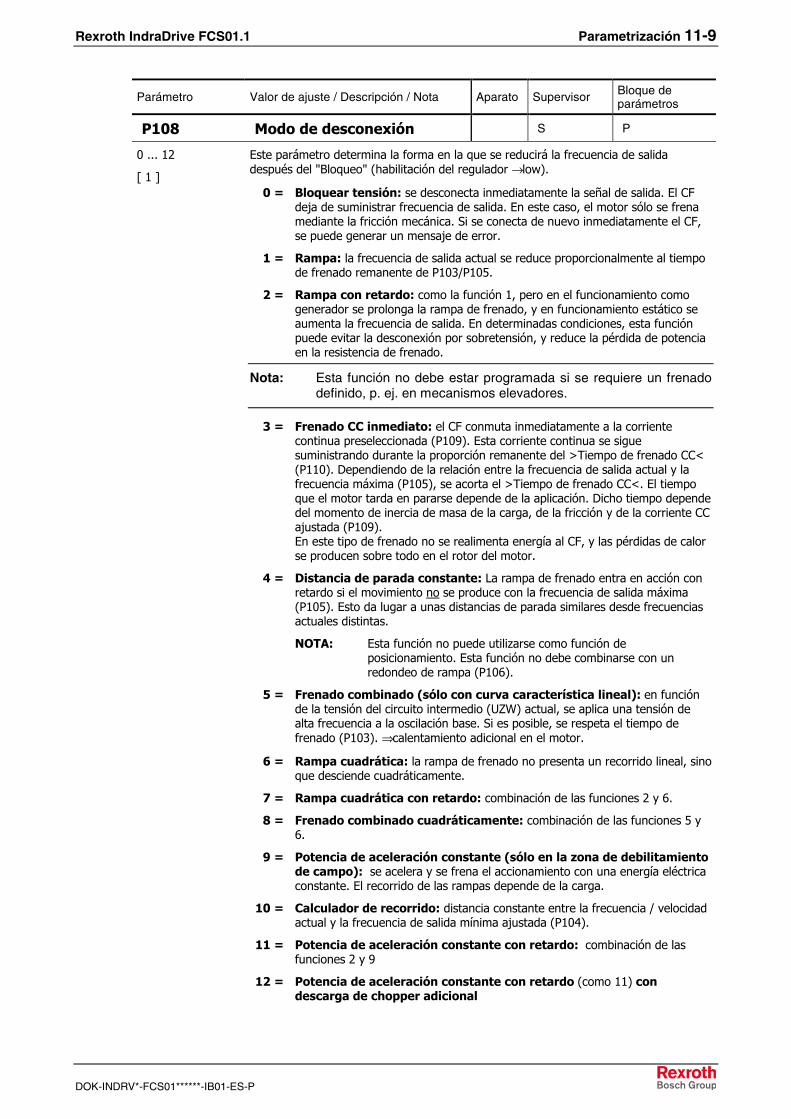
Rexroth IndraDrive FCS01.1 Parametrización 11-9
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de parámetros
P108 Modo de desconexión S P
0 ... 12
[ 1 ]
Este parámetro determina la forma en la que se reducirá la frecuencia de salida después del "Bloqueo" (habilitación del regulador → low).
0 = Bloquear tensión: se desconecta inmediatamente la señal de salida. El CF deja de suministrar frecuencia de salida. En este caso, el motor sólo se frena mediante la fricción mecánica. Si se conecta de nuevo inmediatamente el CF, se puede generar un mensaje de error.
1 = Rampa: la frecuencia de salida actual se reduce proporcionalmente al tiempo de frenado remanente de P103/P105.
2 = Rampa con retardo: como la función 1, pero en el funcionamiento como generador se prolonga la rampa de frenado, y en funcionamiento estático se aumenta la frecuencia de salida. En determinadas condiciones, esta función puede evitar la desconexión por sobretensión, y reduce la pérdida de potencia en la resistencia de frenado.
Nota: Esta función no debe estar programada si se requiere un frenado definido, p. ej. en mecanismos elevadores.
3 = Frenado CC inmediato: el CF conmuta inmediatamente a la corriente continua preseleccionada (P109). Esta corriente continua se sigue suministrando durante la proporción remanente del >Tiempo de frenado CC< (P110). Dependiendo de la relación entre la frecuencia de salida actual y la frecuencia máxima (P105), se acorta el >Tiempo de frenado CC<. El tiempo que el motor tarda en pararse depende de la aplicación. Dicho tiempo depende del momento de inercia de masa de la carga, de la fricción y de la corriente CC ajustada (P109). En este tipo de frenado no se realimenta energía al CF, y las pérdidas de calor se producen sobre todo en el rotor del motor.
4 = Distancia de parada constante: La rampa de frenado entra en acción con retardo si el movimiento no se produce con la frecuencia de salida máxima (P105). Esto da lugar a unas distancias de parada similares desde frecuencias actuales distintas.
NOTA: Esta función no puede utilizarse como función de posicionamiento. Esta función no debe combinarse con un redondeo de rampa (P106).
5 = Frenado combinado (sólo con curva característica lineal): en función de la tensión del circuito intermedio (UZW) actual, se aplica una tensión de alta frecuencia a la oscilación base. Si es posible, se respeta el tiempo de frenado (P103). ⇒ calentamiento adicional en el motor.
6 = Rampa cuadrática: la rampa de frenado no presenta un recorrido lineal, sino que desciende cuadráticamente.
7 = Rampa cuadrática con retardo: combinación de las funciones 2 y 6.
8 = Frenado combinado cuadráticamente: combinación de las funciones 5 y 6.
9 = Potencia de aceleración constante (sólo en la zona de debilitamiento de campo): se acelera y se frena el accionamiento con una energía eléctrica constante. El recorrido de las rampas depende de la carga.
10 = Calculador de recorrido: distancia constante entre la frecuencia / velocidad actual y la frecuencia de salida mínima ajustada (P104).
11 = Potencia de aceleración constante con retardo: combinación de las funciones 2 y 9
12 = Potencia de aceleración constante con retardo (como 11) con descarga de chopper adicional
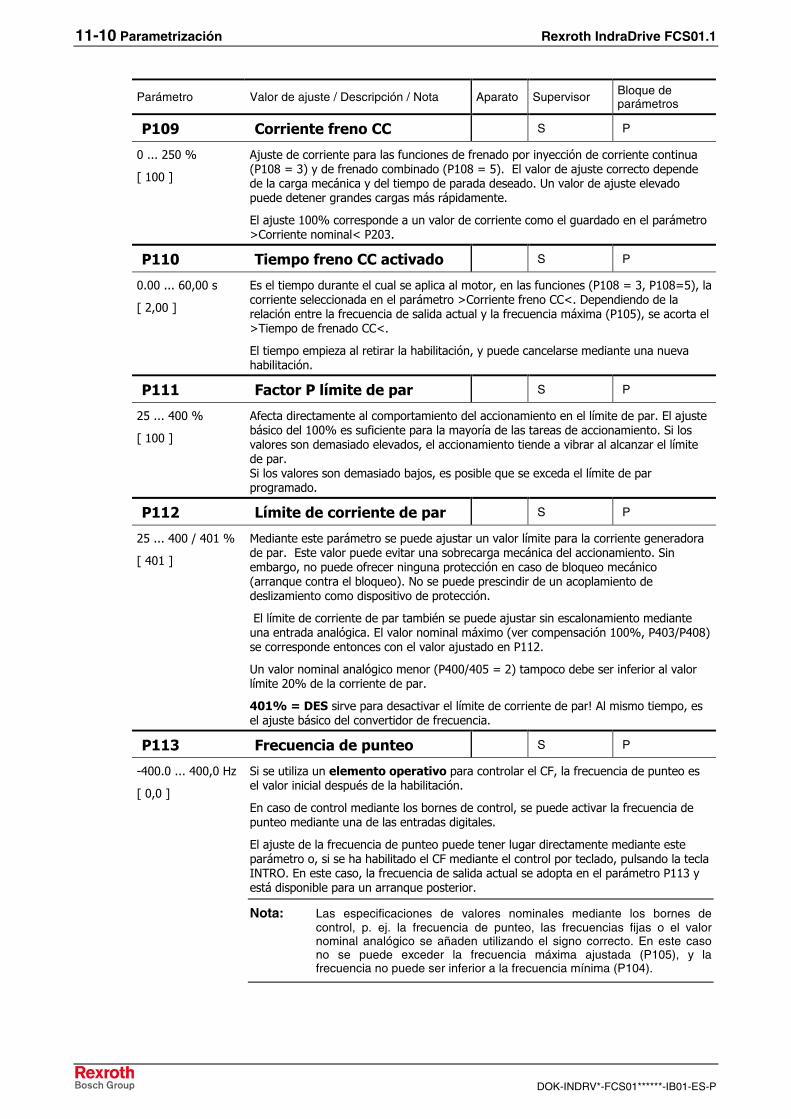
11-10 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de parámetros
P109 Corriente freno CC S P
0 ... 250 %
[ 100 ] Ajuste de corriente para las funciones de frenado por inyección de corriente continua (P108 = 3) y de frenado combinado (P108 = 5). El valor de ajuste correcto depende de la carga mecánica y del tiempo de parada deseado. Un valor de ajuste elevado puede detener grandes cargas más rápidamente.
El ajuste 100% corresponde a un valor de corriente como el guardado en el parámetro >Corriente nominal< P203.
P110 Tiempo freno CC activado S P
0.00 ... 60,00 s
[ 2,00 ] Es el tiempo durante el cual se aplica al motor, en las funciones (P108 = 3, P108=5), la corriente seleccionada en el parámetro >Corriente freno CC<. Dependiendo de la relación entre la frecuencia de salida actual y la frecuencia máxima (P105), se acorta el >Tiempo de frenado CC<.
El tiempo empieza al retirar la habilitación, y puede cancelarse mediante una nueva habilitación.
P111 Factor P límite de par S P
25 ... 400 %
[ 100 ] Afecta directamente al comportamiento del accionamiento en el límite de par. El ajuste básico del 100% es suficiente para la mayoría de las tareas de accionamiento. Si los valores son demasiado elevados, el accionamiento tiende a vibrar al alcanzar el límite de par. Si los valores son demasiado bajos, es posible que se exceda el límite de par programado.
P112 Límite de corriente de par S P
25 ... 400 / 401 %
[ 401 ] Mediante este parámetro se puede ajustar un valor límite para la corriente generadora de par. Este valor puede evitar una sobrecarga mecánica del accionamiento. Sin embargo, no puede ofrecer ninguna protección en caso de bloqueo mecánico (arranque contra el bloqueo). No se puede prescindir de un acoplamiento de deslizamiento como dispositivo de protección.
El límite de corriente de par también se puede ajustar sin escalonamiento mediante una entrada analógica. El valor nominal máximo (ver compensación 100%, P403/P408) se corresponde entonces con el valor ajustado en P112.
Un valor nominal analógico menor (P400/405 = 2) tampoco debe ser inferior al valor límite 20% de la corriente de par.
401% = DES sirve para desactivar el límite de corriente de par! Al mismo tiempo, es el ajuste básico del convertidor de frecuencia.
P113 Frecuencia de punteo S P
-400.0 ... 400,0 Hz
[ 0,0 ] Si se utiliza un elemento operativo para controlar el CF, la frecuencia de punteo es el valor inicial después de la habilitación.
En caso de control mediante los bornes de control, se puede activar la frecuencia de punteo mediante una de las entradas digitales.
El ajuste de la frecuencia de punteo puede tener lugar directamente mediante este parámetro o, si se ha habilitado el CF mediante el control por teclado, pulsando la tecla INTRO. En este caso, la frecuencia de salida actual se adopta en el parámetro P113 y está disponible para un arranque posterior.
Nota: Las especificaciones de valores nominales mediante los bornes de control, p. ej. la frecuencia de punteo, las frecuencias fijas o el valor nominal analógico se añaden utilizando el signo correcto. En este caso no se puede exceder la frecuencia máxima ajustada (P105), y la frecuencia no puede ser inferior a la frecuencia mínima (P104).
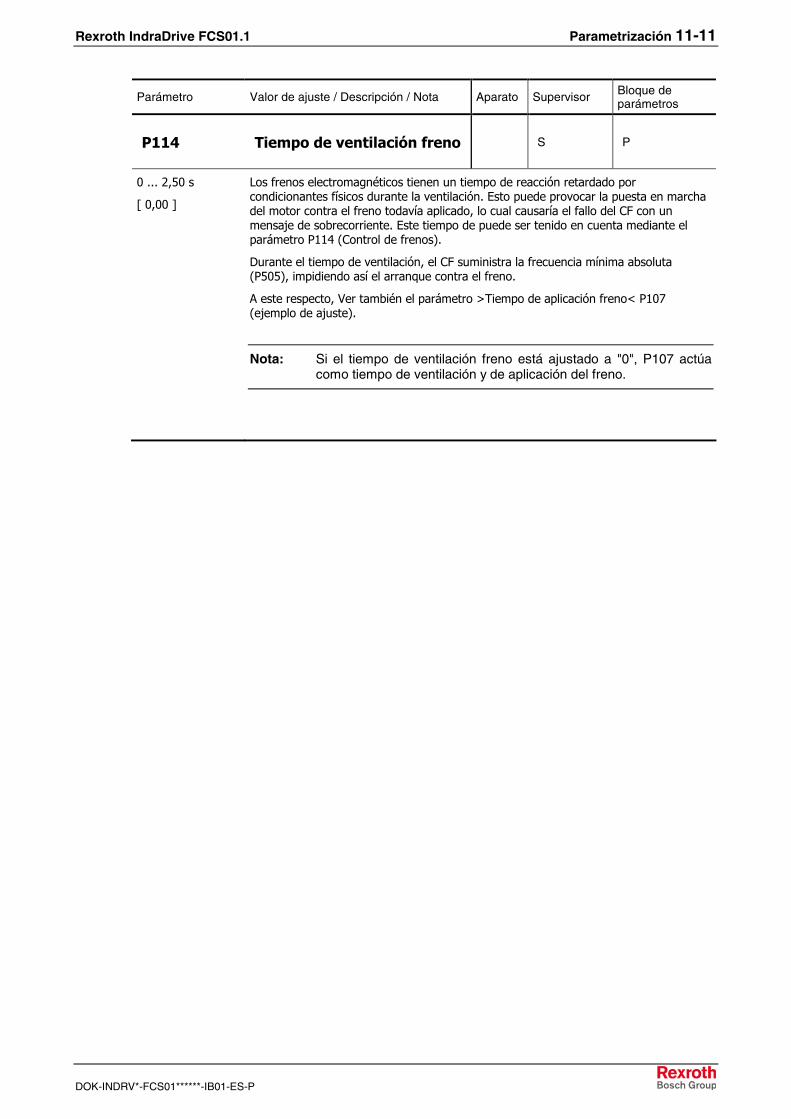
Rexroth IndraDrive FCS01.1 Parametrización 11-11
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de parámetros
P114
Tiempo de ventilación freno S P
0 ... 2,50 s
[ 0,00 ] Los frenos electromagnéticos tienen un tiempo de reacción retardado por condicionantes físicos durante la ventilación. Esto puede provocar la puesta en marcha del motor contra el freno todavía aplicado, lo cual causaría el fallo del CF con un mensaje de sobrecorriente. Este tiempo de puede ser tenido en cuenta mediante el parámetro P114 (Control de frenos).
Durante el tiempo de ventilación, el CF suministra la frecuencia mínima absoluta (P505), impidiendo así el arranque contra el freno.
A este respecto, Ver también el parámetro >Tiempo de aplicación freno< P107 (ejemplo de ajuste).
Nota: Si el tiempo de ventilación freno está ajustado a "0", P107 actúa como tiempo de ventilación y de aplicación del freno.
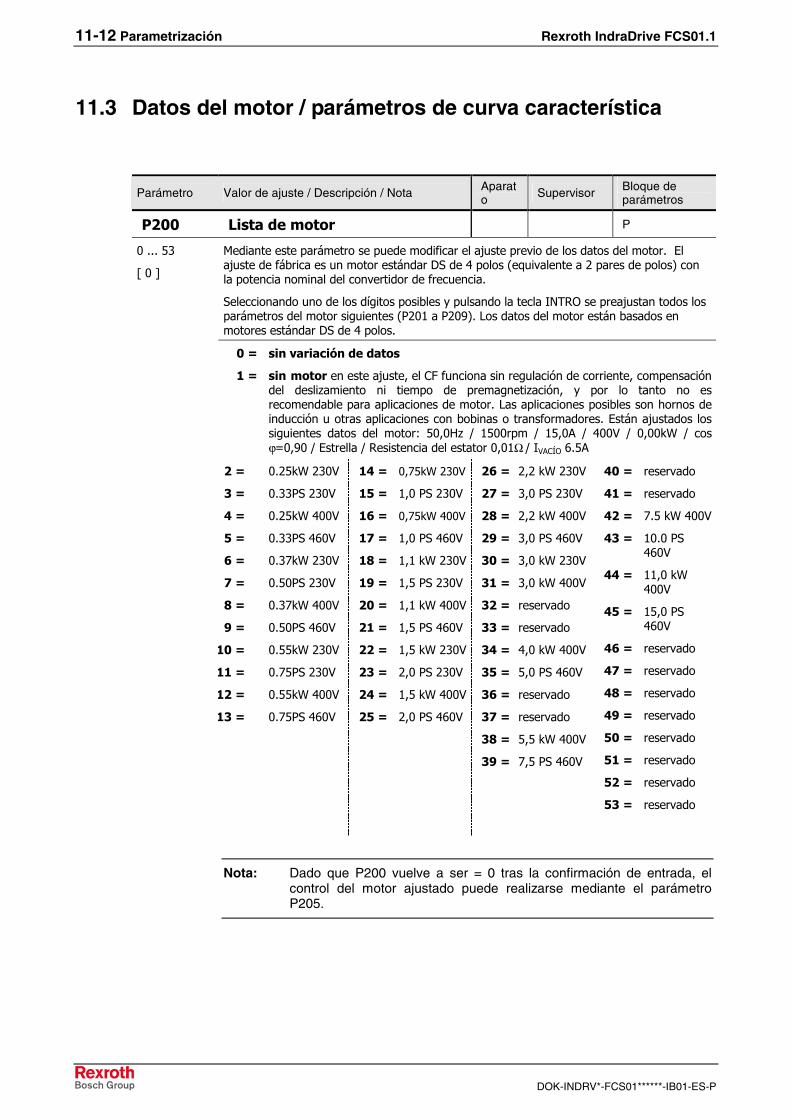
11-12 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
11.3 Datos del motor / parámetros de curva característica
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de
parámetros
P200 Lista de motor P
Mediante este parámetro se puede modificar el ajuste previo de los datos del motor. El ajuste de fábrica es un motor estándar DS de 4 polos (equivalente a 2 pares de polos) con la potencia nominal del convertidor de frecuencia.
Seleccionando uno de los dígitos posibles y pulsando la tecla INTRO se preajustan todos los parámetros del motor siguientes (P201 a P209). Los datos del motor están basados en motores estándar DS de 4 polos.
0 = sin variación de datos
1 = sin motor en este ajuste, el CF funciona sin regulación de corriente, compensación del deslizamiento ni tiempo de premagnetización, y por lo tanto no es recomendable para aplicaciones de motor. Las aplicaciones posibles son hornos de inducción u otras aplicaciones con bobinas o transformadores. Están ajustados los siguientes datos del motor: 50,0Hz / 1500rpm / 15,0A / 400V / 0,00kW / cos ϕ=0,90 / Estrella / Resistencia del estator 0,01Ω / IVACÍO 6.5A
2 = 0.25kW 230V
3 = 0.33PS 230V
4 = 0.25kW 400V
5 = 0.33PS 460V
6 = 0.37kW 230V
7 = 0.50PS 230V
8 = 0.37kW 400V
9 = 0.50PS 460V
10 = 0.55kW 230V
11 = 0.75PS 230V
12 = 0.55kW 400V
13 = 0.75PS 460V
14 = 0,75kW 230V
15 = 1,0 PS 230V
16 = 0,75kW 400V
17 = 1,0 PS 460V
18 = 1,1 kW 230V
19 = 1,5 PS 230V
20 = 1,1 kW 400V
21 = 1,5 PS 460V
22 = 1,5 kW 230V
23 = 2,0 PS 230V
24 = 1,5 kW 400V
25 = 2,0 PS 460V
26 = 2,2 kW 230V
27 = 3,0 PS 230V
28 = 2,2 kW 400V
29 = 3,0 PS 460V
30 = 3,0 kW 230V
31 = 3,0 kW 400V
32 = reservado
33 = reservado
34 = 4,0 kW 400V
35 = 5,0 PS 460V
36 = reservado
37 = reservado
38 = 5,5 kW 400V
39 = 7,5 PS 460V
40 = reservado
41 = reservado
42 = 7.5 kW 400V
43 = 10.0 PS 460V
44 = 11,0 kW 400V
45 = 15,0 PS 460V
46 = reservado
47 = reservado
48 = reservado
49 = reservado
50 = reservado
51 = reservado
52 = reservado
53 = reservado
0 ... 53
[ 0 ]
Nota: Dado que P200 vuelve a ser = 0 tras la confirmación de entrada, el control del motor ajustado puede realizarse mediante el parámetro P205.
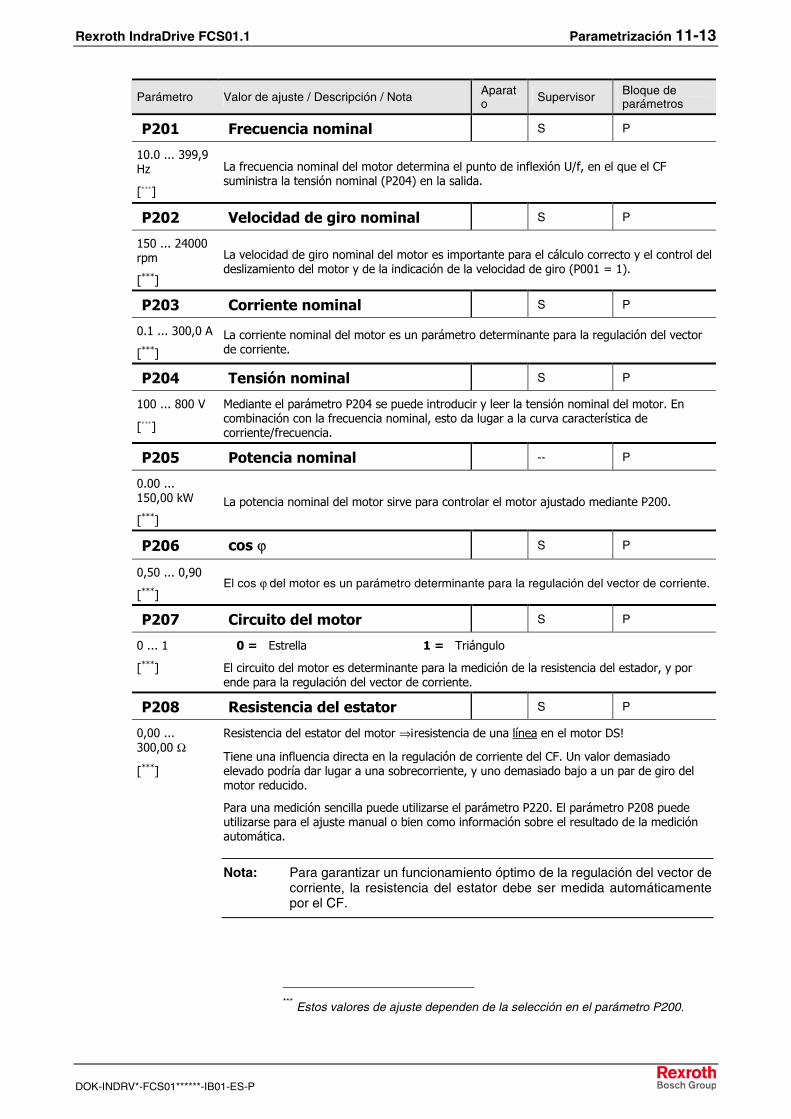
Rexroth IndraDrive FCS01.1 Parametrización 11-13
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de
parámetros
P201 Frecuencia nominal S P
10.0 ... 399,9 Hz
[∗∗∗]
La frecuencia nominal del motor determina el punto de inflexión U/f, en el que el CF suministra la tensión nominal (P204) en la salida.
P202 Velocidad de giro nominal S P
150 ... 24000 rpm
[***]
La velocidad de giro nominal del motor es importante para el cálculo correcto y el control del deslizamiento del motor y de la indicación de la velocidad de giro (P001 = 1).
P203 Corriente nominal S P
0.1 ... 300,0 A
[***] La corriente nominal del motor es un parámetro determinante para la regulación del vector de corriente.
P204 Tensión nominal S P
100 ... 800 V
[∗∗∗]
Mediante el parámetro P204 se puede introducir y leer la tensión nominal del motor. En combinación con la frecuencia nominal, esto da lugar a la curva característica de corriente/frecuencia.
P205 Potencia nominal -- P
0.00 ... 150,00 kW
[***] La potencia nominal del motor sirve para controlar el motor ajustado mediante P200.
P206 cos ϕ S P
0,50 ... 0,90
[***] El cos ϕ del motor es un parámetro determinante para la regulación del vector de corriente.
P207 Circuito del motor S P
0 = Estrella 1 = Triángulo 0 ... 1
[***] El circuito del motor es determinante para la medición de la resistencia del estador, y por ende para la regulación del vector de corriente.
P208 Resistencia del estator S P
0,00 ... 300,00 Ω
[***]
Resistencia del estator del motor ⇒ ¡resistencia de una línea en el motor DS!
Tiene una influencia directa en la regulación de corriente del CF. Un valor demasiado elevado podría dar lugar a una sobrecorriente, y uno demasiado bajo a un par de giro del motor reducido.
Para una medición sencilla puede utilizarse el parámetro P220. El parámetro P208 puede utilizarse para el ajuste manual o bien como información sobre el resultado de la medición automática.
Nota: Para garantizar un funcionamiento óptimo de la regulación del vector de corriente, la resistencia del estator debe ser medida automáticamente por el CF.
*** Estos valores de ajuste dependen de la selección en el parámetro P200.
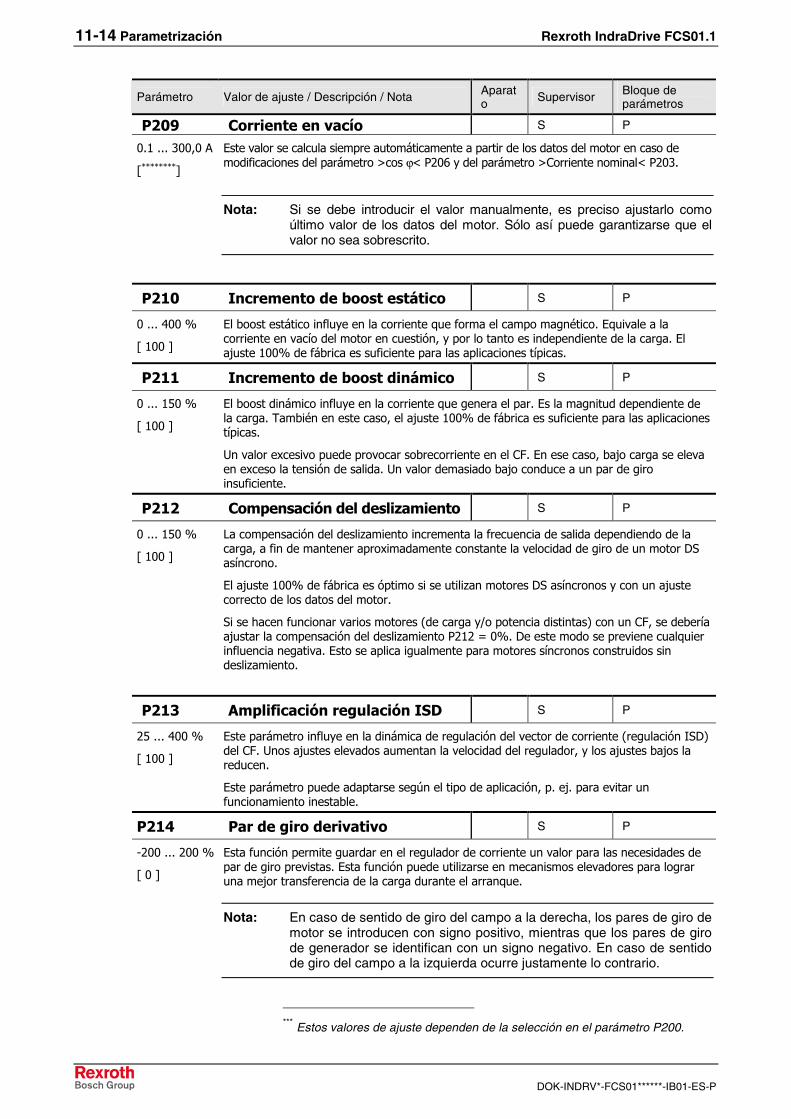
11-14 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de
parámetros
P209 Corriente en vacío S P
0.1 ... 300,0 A
[********]
Este valor se calcula siempre automáticamente a partir de los datos del motor en caso de modificaciones del parámetro >cos ϕ< P206 y del parámetro >Corriente nominal< P203.
Nota: Si se debe introducir el valor manualmente, es preciso ajustarlo como último valor de los datos del motor. Sólo así puede garantizarse que el valor no sea sobrescrito.
P210 Incremento de boost estático S P
0 ... 400 %
[ 100 ] El boost estático influye en la corriente que forma el campo magnético. Equivale a la corriente en vacío del motor en cuestión, y por lo tanto es independiente de la carga. El ajuste 100% de fábrica es suficiente para las aplicaciones típicas.
P211 Incremento de boost dinámico S P
0 ... 150 %
[ 100 ] El boost dinámico influye en la corriente que genera el par. Es la magnitud dependiente de la carga. También en este caso, el ajuste 100% de fábrica es suficiente para las aplicaciones típicas.
Un valor excesivo puede provocar sobrecorriente en el CF. En ese caso, bajo carga se eleva en exceso la tensión de salida. Un valor demasiado bajo conduce a un par de giro insuficiente.
P212 Compensación del deslizamiento S P
0 ... 150 %
[ 100 ] La compensación del deslizamiento incrementa la frecuencia de salida dependiendo de la carga, a fin de mantener aproximadamente constante la velocidad de giro de un motor DS asíncrono.
El ajuste 100% de fábrica es óptimo si se utilizan motores DS asíncronos y con un ajuste correcto de los datos del motor.
Si se hacen funcionar varios motores (de carga y/o potencia distintas) con un CF, se debería ajustar la compensación del deslizamiento P212 = 0%. De este modo se previene cualquier influencia negativa. Esto se aplica igualmente para motores síncronos construidos sin deslizamiento.
P213 Amplificación regulación ISD S P
25 ... 400 %
[ 100 ] Este parámetro influye en la dinámica de regulación del vector de corriente (regulación ISD) del CF. Unos ajustes elevados aumentan la velocidad del regulador, y los ajustes bajos la reducen.
Este parámetro puede adaptarse según el tipo de aplicación, p. ej. para evitar un funcionamiento inestable.
P214 Par de giro derivativo S P
-200 ... 200 %
[ 0 ] Esta función permite guardar en el regulador de corriente un valor para las necesidades de par de giro previstas. Esta función puede utilizarse en mecanismos elevadores para lograr una mejor transferencia de la carga durante el arranque.
Nota: En caso de sentido de giro del campo a la derecha, los pares de giro de motor se introducen con signo positivo, mientras que los pares de giro de generador se identifican con un signo negativo. En caso de sentido de giro del campo a la izquierda ocurre justamente lo contrario.
*** Estos valores de ajuste dependen de la selección en el parámetro P200.
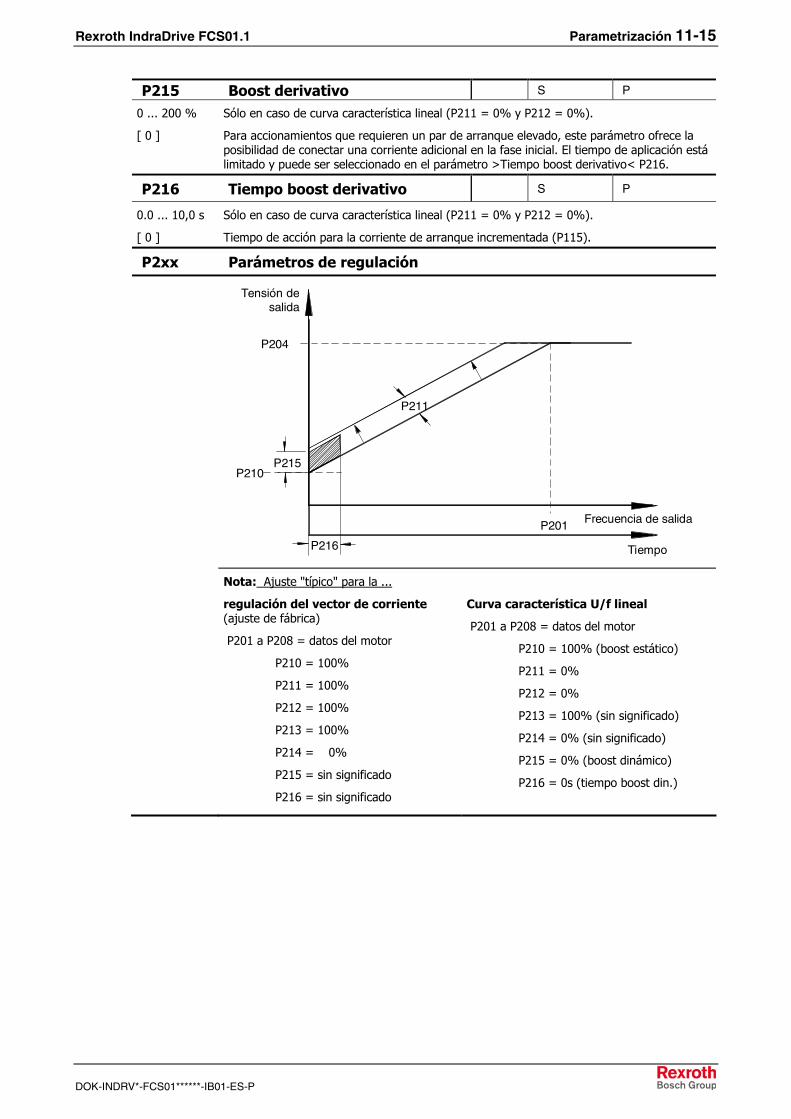
Rexroth IndraDrive FCS01.1 Parametrización 11-15
DOK-INDRV*-FCS01******-IB01-ES-P
P215 Boost derivativo S P
0 ... 200 %
[ 0 ] Sólo en caso de curva característica lineal (P211 = 0% y P212 = 0%).
Para accionamientos que requieren un par de arranque elevado, este parámetro ofrece la posibilidad de conectar una corriente adicional en la fase inicial. El tiempo de aplicación está limitado y puede ser seleccionado en el parámetro >Tiempo boost derivativo< P216.
P216 Tiempo boost derivativo S P
0.0 ... 10,0 s
[ 0 ] Sólo en caso de curva característica lineal (P211 = 0% y P212 = 0%).
Tiempo de acción para la corriente de arranque incrementada (P115).
P2xx Parámetros de regulación
P211
P210
P204
P201
P216
P215
Tensión de salida
Frecuencia de salida
Tiempo
Nota: Ajuste "típico" para la ...
regulación del vector de corriente (ajuste de fábrica)
P201 a P208 = datos del motor
P210 = 100%
P211 = 100%
P212 = 100%
P213 = 100%
P214 = 0%
P215 = sin significado
P216 = sin significado
Curva característica U/f lineal
P201 a P208 = datos del motor
P210 = 100% (boost estático)
P211 = 0%
P212 = 0%
P213 = 100% (sin significado)
P214 = 0% (sin significado)
P215 = 0% (boost dinámico)
P216 = 0s (tiempo boost din.)
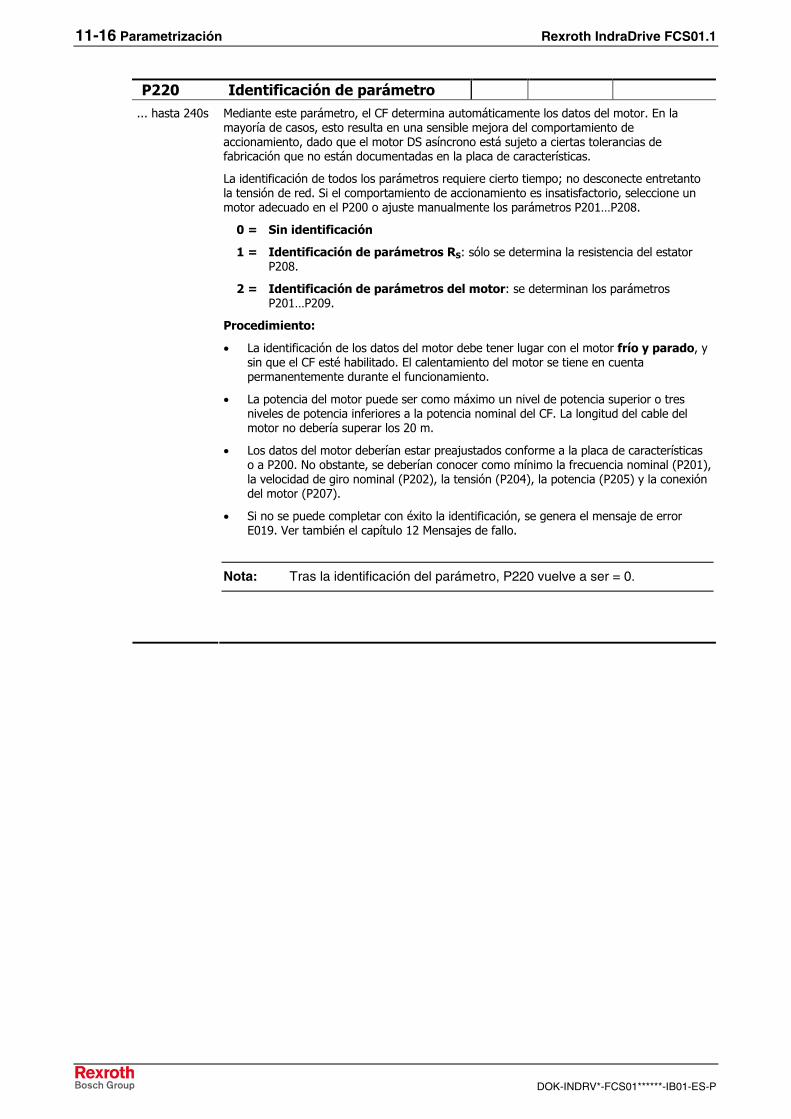
11-16 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
P220 Identificación de parámetro
Mediante este parámetro, el CF determina automáticamente los datos del motor. En la mayoría de casos, esto resulta en una sensible mejora del comportamiento de accionamiento, dado que el motor DS asíncrono está sujeto a ciertas tolerancias de fabricación que no están documentadas en la placa de características.
La identificación de todos los parámetros requiere cierto tiempo; no desconecte entretanto la tensión de red. Si el comportamiento de accionamiento es insatisfactorio, seleccione un motor adecuado en el P200 o ajuste manualmente los parámetros P201…P208.
... hasta 240s
0 = Sin identificación
1 = Identificación de parámetros RS: sólo se determina la resistencia del estator P208.
2 = Identificación de parámetros del motor: se determinan los parámetros P201…P209.
Procedimiento:
• La identificación de los datos del motor debe tener lugar con el motor frío y parado, y sin que el CF esté habilitado. El calentamiento del motor se tiene en cuenta permanentemente durante el funcionamiento.
• La potencia del motor puede ser como máximo un nivel de potencia superior o tres niveles de potencia inferiores a la potencia nominal del CF. La longitud del cable del motor no debería superar los 20 m.
• Los datos del motor deberían estar preajustados conforme a la placa de características o a P200. No obstante, se deberían conocer como mínimo la frecuencia nominal (P201), la velocidad de giro nominal (P202), la tensión (P204), la potencia (P205) y la conexión del motor (P207).
• Si no se puede completar con éxito la identificación, se genera el mensaje de error E019. Ver también el capítulo 12 Mensajes de fallo.
Nota: Tras la identificación del parámetro, P220 vuelve a ser = 0.
Rexroth IndraDrive FCS01.1 Parametrización 11-17
DOK-INDRV*-FCS01******-IB01-ES-P
11.4 Bornes de control
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de
parámetros
P400 Función entrada analógica 1 P
0 ... 82
[ 1 ]
La entrada analógica del CF puede utilizarse para diversas funciones. Es preciso recordar que sólo es posible en cada momento una de las funciones descritas a continuación.
Por ejemplo, si se ha seleccionado una frecuencia PID real, el valor nominal de frecuencia puede ser una señal analógica. El valor nominal puede ser especificado p. ej. mediante una frecuencia fija.
Funciones analógicas:
0 = Desactivado, la entrada analógica carece de función. Tras la habilitación del CF mediante los bornes de control, éste suministra la frecuencia mínima que se haya ajustado (P104).
1 = Frecuencia nominal, el margen analógico especificado (P402/P403) varía la frecuencia de salida entre las frecuencias mínima y máxima ajustadas (P104/P105).
2 = Límite de corriente de par, basado en el límite de corriente de par ajustado (P112), puede modificarse mediante un valor analógico. El 100% del valor nominal corresponde aquí al límite de corriente de par P112 ajustado. El valor no debe ser inferior al 20%.
3 = Frecuencia real PID *, se necesita para crear un circuito de regulación. La entrada analógica (valor real) se compara con el valor nominal (p. ej. frecuencia fija). La frecuencia de salida se adapta en la medida de lo posible hasta que el valor real iguala al valor nominal. (ver variables de regulación P413 – P415)
4 = Adición de frecuencia **, el valor de frecuencia suministrado se añade al valor nominal.
5 = Sustracción de frecuencia **, el valor de frecuencia suministrado se resta del valor nominal.
6 = Corriente de par, basada en el límite de corriente ajustado (P536), puede modificarse mediante la entrada analógica.
7 = Frecuencia máxima, se varía la frecuencia máxima del CF. 100% corresponde al ajuste en el parámetro P411. 0% corresponde al ajuste en el parámetro P410 No se pueden alcanzar valores inferiores ni superiores a los valores para la frecuencia de salida mín./máx. (P104/P105).
8 = Frecuencia real PID limitada *, como la función 3, pero la frecuencia de salida no puede descender por debajo del valor programado para la frecuencia mínima en el parámetro P104. (sin inversión del sentido de rotación)
9 = Frecuencia real PID controlada *, como la función 3, pero el CF desconecta la frecuencia de salida al alcanzarse la frecuencia mínima P104.
10 = reservado
11 = Par de giro derivativo, una función que permite guardar en el regulador un valor para las necesidades de par previstas (conmutación del factor de interferencia). Esta función puede utilizarse en mecanismos elevadores con detección de carga aparte para mejorar la transferencia de carga.
12 = reservado
13 = Multiplicación, el valor nominal se multiplica por el valor analógico especificado. El valor analógico alineado al 100% corresponde a un factor de multiplicación de 1.
... continúa en la página siguiente
11-18 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de
parámetros
14 = Valor real regulador de proceso *, activa el regulador de proceso, la entrada analógica 1 está conectada al codificador de valores reales (compensador, sensor de presión, medidor del caudal, etc.). El modo (0-10V ó 0/4-20mA) se ajusta en P401.
15 = Valor nominal regulador de proceso *, como la función 14, pero el valor nominal es especificado (p. ej. por un potenciómetro). El valor real debe especificarse utilizando una entrada distinta.
16 = Regulador de proceso derivativo *, añade un valor nominal adicional ajustable conforme al regulador de proceso.
*) hallará detalles adicionales sobre el regulador de proceso en el capítulo 14.2 Información adicional
**) Los límites de estos valores se establecen mediante el parámetro >Frecuencia mínima valores nominales adicionales< P410 y el parámetro >Frecuencia máxima valores nominales adicionales< P411.
Funciones digitales:
21 = Habilitación derecha
22 = Habilitación izquierda
23 = Inversión del sentido de giro
24 = Frecuencia fija 1
25 = Frecuencia fija 2
26 = Frecuencia fija 3
27 = Frecuencia fija 4
28 = reservado
29 = Mantener frecuencia
30 = Bloquear tensión
31 = Parada rápida
32 = Confirmación del error
33 = Entrada de resistor PTC
34 = Control remoto
35 = Frecuencia de punteo
36 = Mantener frecuencia potencióm. motor
37 = reservado
38 = Watchdog
39 = Valor nominal 1 activ. /desact.
40 = Valor nominal 2 activ. /desact.
41 = Frecuencia fija 5
42 = … 49 reservado
50 = Regulador PID activ. / desact.
51 = Bloquear habilitación derecha
52 = Bloquear habilitación izquierda
53 = … 66 reservado
67 = Aumentar frecuencia de punteo potencióm. motor
68 = Reducir frecuencia de punteo potencióm. motor
69 = reservado
70 = Bit 0 array de frecuencia fija
71 = Bit 1 array de frecuencia fija
72 = Bit 2 array de frecuencia fija
73 = Bit 3 array de frecuencia fija
74 = Bit 4 array de frecuencia fija
75 = … 82 reservado
Después de los parámetros P420…P424 se encuentra una descripción detallada de las funciones digitales. Las funciones de las entradas digitales coinciden con las funciones digitales de las entradas analógicas.
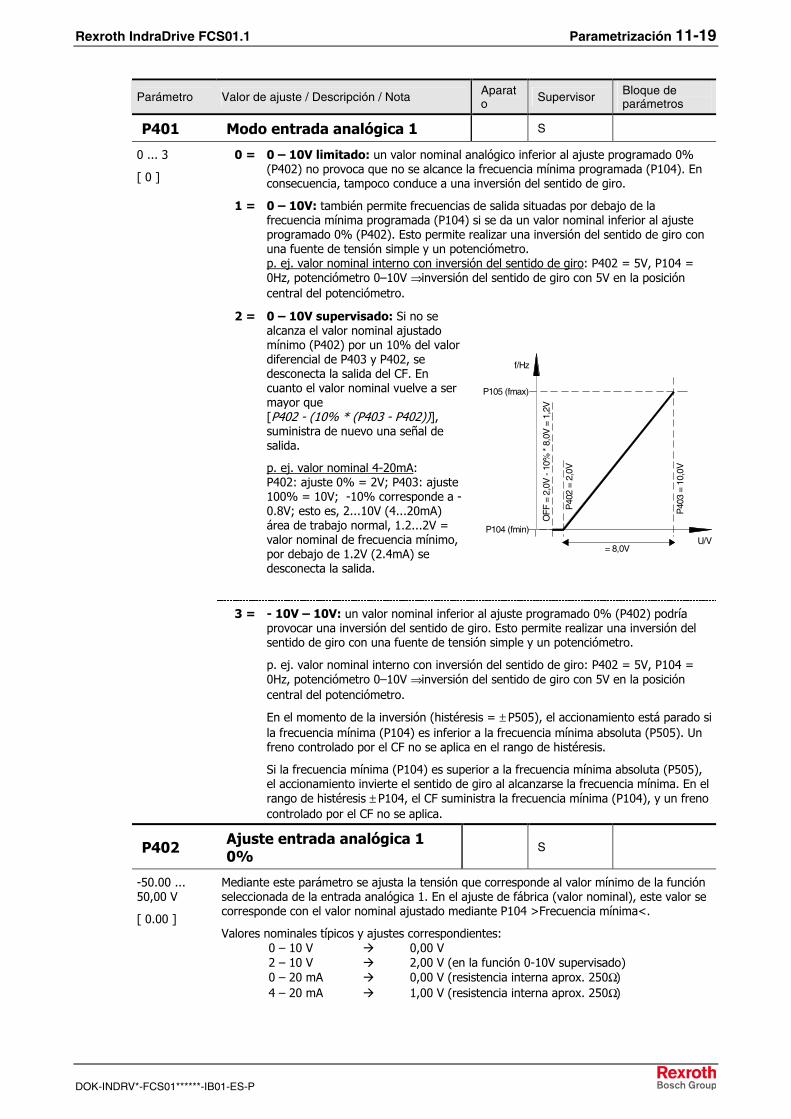
Rexroth IndraDrive FCS01.1 Parametrización 11-19
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de
parámetros
P401 Modo entrada analógica 1 S
0 = 0 – 10V limitado: un valor nominal analógico inferior al ajuste programado 0% (P402) no provoca que no se alcance la frecuencia mínima programada (P104). En consecuencia, tampoco conduce a una inversión del sentido de giro.
1 = 0 – 10V: también permite frecuencias de salida situadas por debajo de la frecuencia mínima programada (P104) si se da un valor nominal inferior al ajuste programado 0% (P402). Esto permite realizar una inversión del sentido de giro con una fuente de tensión simple y un potenciómetro. p. ej. valor nominal interno con inversión del sentido de giro: P402 = 5V, P104 = 0Hz, potenciómetro 0–10V ⇒ inversión del sentido de giro con 5V en la posición central del potenciómetro.
2 = 0 – 10V supervisado: Si no se alcanza el valor nominal ajustado mínimo (P402) por un 10% del valor diferencial de P403 y P402, se desconecta la salida del CF. En cuanto el valor nominal vuelve a ser mayor que [P402 - (10% * (P403 - P402))], suministra de nuevo una señal de salida.
p. ej. valor nominal 4-20mA: P402: ajuste 0% = 2V; P403: ajuste 100% = 10V; -10% corresponde a -0.8V; esto es, 2...10V (4...20mA) área de trabajo normal, 1.2...2V = valor nominal de frecuencia mínimo, por debajo de 1.2V (2.4mA) se desconecta la salida.
f/Hz
P104 (fmin)
P105 (fmax)
P40
3 =
10,0
V
P40
2 =
2,0V
= 8,0VU/V
OFF
= 2
,0V
- 10
% *
8,0
V =
1,2
V
0 ... 3
[ 0 ]
3 = - 10V – 10V: un valor nominal inferior al ajuste programado 0% (P402) podría provocar una inversión del sentido de giro. Esto permite realizar una inversión del sentido de giro con una fuente de tensión simple y un potenciómetro.
p. ej. valor nominal interno con inversión del sentido de giro: P402 = 5V, P104 = 0Hz, potenciómetro 0–10V ⇒ inversión del sentido de giro con 5V en la posición central del potenciómetro.
En el momento de la inversión (histéresis = ± P505), el accionamiento está parado si la frecuencia mínima (P104) es inferior a la frecuencia mínima absoluta (P505). Un freno controlado por el CF no se aplica en el rango de histéresis.
Si la frecuencia mínima (P104) es superior a la frecuencia mínima absoluta (P505), el accionamiento invierte el sentido de giro al alcanzarse la frecuencia mínima. En el rango de histéresis ± P104, el CF suministra la frecuencia mínima (P104), y un freno controlado por el CF no se aplica.
P402 Ajuste entrada analógica 1 0%
S
-50.00 ... 50,00 V
[ 0.00 ]
Mediante este parámetro se ajusta la tensión que corresponde al valor mínimo de la función seleccionada de la entrada analógica 1. En el ajuste de fábrica (valor nominal), este valor se corresponde con el valor nominal ajustado mediante P104 >Frecuencia mínima<.
Valores nominales típicos y ajustes correspondientes: 0 – 10 V 0,00 V 2 – 10 V 2,00 V (en la función 0-10V supervisado) 0 – 20 mA 0,00 V (resistencia interna aprox. 250Ω) 4 – 20 mA 1,00 V (resistencia interna aprox. 250Ω)
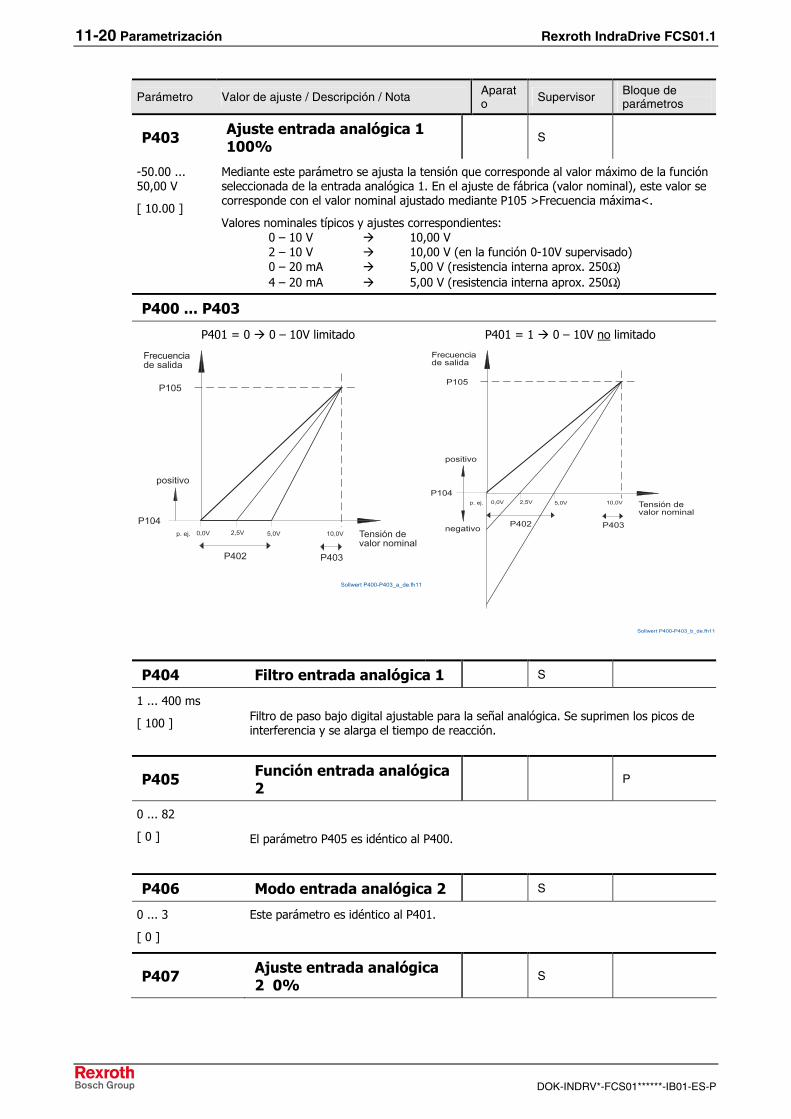
11-20 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de
parámetros
P403 Ajuste entrada analógica 1 100%
S
-50.00 ... 50,00 V
[ 10.00 ]
Mediante este parámetro se ajusta la tensión que corresponde al valor máximo de la función seleccionada de la entrada analógica 1. En el ajuste de fábrica (valor nominal), este valor se corresponde con el valor nominal ajustado mediante P105 >Frecuencia máxima<.
Valores nominales típicos y ajustes correspondientes: 0 – 10 V 10,00 V 2 – 10 V 10,00 V (en la función 0-10V supervisado) 0 – 20 mA 5,00 V (resistencia interna aprox. 250Ω) 4 – 20 mA 5,00 V (resistencia interna aprox. 250Ω)
P400 ... P403
P401 = 0 0 – 10V limitado
P401 = 1 0 – 10V no limitado
P404 Filtro entrada analógica 1 S
1 ... 400 ms
[ 100 ]
Filtro de paso bajo digital ajustable para la señal analógica. Se suprimen los picos de interferencia y se alarga el tiempo de reacción.
P405 Función entrada analógica 2
P
0 ... 82
[ 0 ] El parámetro P405 es idéntico al P400.
P406 Modo entrada analógica 2 S
0 ... 3
[ 0 ]
Este parámetro es idéntico al P401.
P407 Ajuste entrada analógica 2 0%
S
Rexroth IndraDrive FCS01.1 Parametrización 11-21
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de
parámetros
-50.00 ... 50,00 V
[ 0.00 ] Este parámetro es idéntico al P402.
P408 Ajuste entrada analógica 2 100%
S
-50.00 ... 50,00 V
[ 10,00 ] Este parámetro es idéntico al P403.
P409 Filtro entrada analógica 2 S
1 ... 400 ms
[ 100 ]
Este parámetro es idéntico al P404.
P410 Frecuencia mínima valores nominales adicionales
P
-400.0 ... 400,0 Hz
[ 0.0 ] Es la frecuencia mínima que puede tener efecto sobre el valor nominal mediante los valores nominales adicionales.
Son valores nominales adicionales todas las frecuencias que se suministran adicionalmente al CF para funciones ulteriores:
Frecuencia real PID Adición de frecuencia Sustracción de frecuencia Valores nominales adicionales mediante BUS Regulador de proceso Frecuencia mínima mediante valor nominal analógico (potenciómetro)
P411 Frecuencia máxima valores nominales adicionales
P
-400,0 ... 400,0 Hz
[ 50,0 ] Es la frecuencia máxima que puede tener efecto sobre el valor nominal mediante los valores nominales adicionales.
Son valores nominales adicionales todas las frecuencias que se suministran adicionalmente al CF para funciones ulteriores:
Frecuencia real PID Adición de frecuencia Sustracción de frecuencia Valores nominales adicionales mediante BUS Regulador de proceso Frecuencia máxima mediante valor nominal analógico (potenciómetro)
P412 Valor nominal regulador de proceso
S P
-10,0 ... 10,0 V
[ 5,0 ] Para la especificación fija de un valor nominal para el regulador de proceso que sólo debería modificarse ocasionalmente.
Sólo con P400 = 14 ... 16 (regulador de proceso). Hallará detalles adicionales en el capítulo 14.2 Regulador de proceso.
P413 Porcentaje P regulador PID S P
0,0 ... 400,0 %
[ 10,0 ] Sólo es efectivo si se ha seleccionado la función Frecuencia real PID.
El porcentaje P del regulador PID determina el salto de frecuencia durante una desviación de regulación referida a la diferencia de regulación.
P. ej. con un ajuste de P413 = 10% y una desviación de regulación del 50% se añade un 5% al valor nominal actual.
P414 Porcentaje I regulador PID S P
0,0 ... 300,00 %/ms
[ 1,00 ]
Sólo es efectivo si se ha seleccionado la función Frecuencia real PID.
El porcentaje I del regulador PID determina, en caso de una desviación de regulación, la variación de frecuencia en función del tiempo.
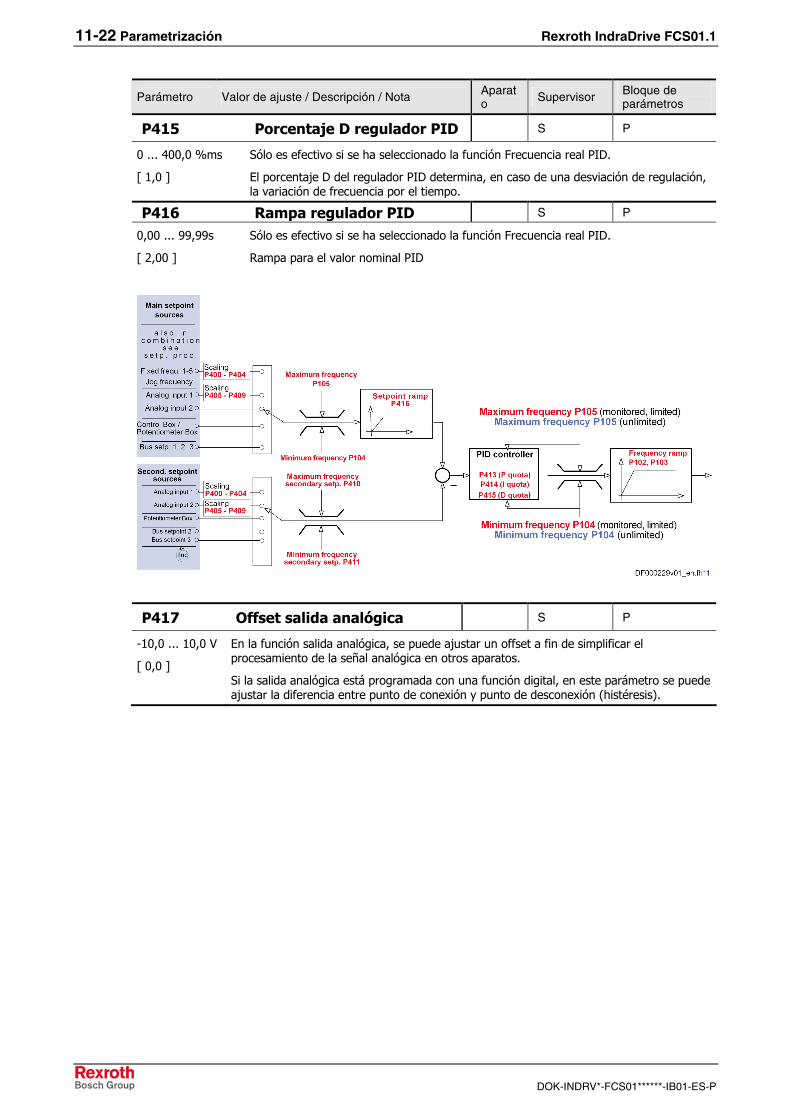
11-22 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de
parámetros
P415 Porcentaje D regulador PID S P
0 ... 400,0 %ms
[ 1,0 ]
Sólo es efectivo si se ha seleccionado la función Frecuencia real PID.
El porcentaje D del regulador PID determina, en caso de una desviación de regulación, la variación de frecuencia por el tiempo.
P416 Rampa regulador PID S P
0,00 ... 99,99s
[ 2,00 ]
Sólo es efectivo si se ha seleccionado la función Frecuencia real PID.
Rampa para el valor nominal PID
P417 Offset salida analógica S P
-10,0 ... 10,0 V
[ 0,0 ]
En la función salida analógica, se puede ajustar un offset a fin de simplificar el procesamiento de la señal analógica en otros aparatos.
Si la salida analógica está programada con una función digital, en este parámetro se puede ajustar la diferencia entre punto de conexión y punto de desconexión (histéresis).
Rexroth IndraDrive FCS01.1 Parametrización 11-23
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de
parámetros
P418 Función salida analógica P
0 ... 52
[ 0 ]
Funciones analógicas:
En los bornes de control se puede tomar una tensión analógica (0 ... +10 voltios) (máx. 5mA). Están disponibles diversas funciones, para las cuales se aplica lo siguiente: una tensión analógica de 0 voltios corresponde siempre al 0% del valor seleccionado. 10 voltios se corresponde siempre con el valor nominal del motor (si no se especifica otra cosa), multiplicado por el factor de normalización P419, como p. ej.:
⇒ 100%
P419motor del nominalValor voltios10
⋅=
0 = Sin función, ninguna señal de salida en los bornes.
1 = Frecuencia real, la tensión analógica es proporcional a la frecuencia de salida del CF.
2 = Velocidad de giro real, es la velocidad de giro síncrona calculada por el CF, basada en el valor nominal existente. No se tienen en cuenta las fluctuaciones de la velocidad de giro dependiente de la carga.
3 = Corriente, es el valor efectivo de la corriente de salida suministrado por el CF.
4 = Corriente de par, indica el par de carga del motor calculado por el CF. (100% = P112)
5 = Tensión, es la tensión de salida suministrada por el CF.
6 = Tensión del circuito intermedio, es la tensión continua en el CF. Ésta no se basa en los datos nominales del motor. ¡10V con una normalización del 100% equivale a 450V CC (230V) o a 850 voltios CC (480V)!
7 = Valor de P542, la salida analógica puede ajustarse mediante el parámetro P542, independientemente del estado operativo actual del CF. Esta función puede proporcionar, p. ej. durante el control de bus (orden de parámetro), un valor analógico procedente del control.
8 = Potencia aparente, es la potencia aparente del motor actual calculada por el CF.
9 = Potencia efectiva, es la potencia efectiva actual calculada por el CF.
10 = Par de giro [%], es el par de giro actual calculado por el CF.
11 = Campo [%], es el campo en el motor actual calculado por el CF.
12 = Frecuencia de salida ±, la tensión analógica es proporcional a la frecuencia de salida del CF, habiéndose desplazado el punto cero a 5V. En caso de sentido de giro a la derecha se emiten valores de 5V a 10V, y en caso de sentido de giro a la izquierda valores de 5V a 0V.
13 = Velocidad de giro real ±, es la velocidad de giro síncrona calculada por el CF, basada en el valor nominal existente, habiéndose desplazado el punto cero a 5V. En caso de sentido de giro a la derecha se emiten valores de 5V a 10V, y en caso de sentido de giro a la izquierda valores de 5V a 0V.
14 = Par de giro [%] ±, es el par de giro actual calculado por el CF, habiéndose desplazado el punto cero a 5V. En caso de pares de motor se emiten valores de 5V a 10V, y en caso de valores de generador valores de 5V a 0V.
30 = Frecuencia nominal antes de rampa de frecuencia, indica la frecuencia resultante de eventuales reguladores antepuestos (ISD, PID, ...). Ésta es entonces la frecuencia nominal para el nivel de potencia, una vez ha sido adaptada mediante la rampa de arranque o de freno (P102, P103).
31 = Valor mediante BUS, la salida analógica se controla mediante un sistema de bus. Se transfieren directamente los datos de proceso (P546, P547, P548)
11-24 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de
parámetros
Funciones digitales:
Todas las funciones de relé descritas en el parámetro >Función relé 1< P434 también pueden transferirse a través de la salida analógica Si se cumple una condición, hay 10 V presentes en los bornes de salida. Una negación de la función puede especificarse en el parámetro >Normalización salida analógica< P419.
15 = Freno externo
16 = Convertidor en funcionamiento
17 = Límite de corriente
18 = Límite de corriente de par
19 = Límite de frecuencia
20 = Valor nominal alcanzado
21 = Error
22 = Aviso
23 = Aviso de sobrecorriente
24 = Aviso de sobretemperatura motor
25 = Límite de corriente de par activo
26 = Valor de P541, control externo
27 = Límite de corriente de par de generador
28 = ... 29 reservado
34 = ... 43 reservado
44 = Bus In Bit 0
45 = Bus In Bit 1
46 = Bus In Bit 2
47 = Bus In Bit 3
48 = Bus In Bit 4
49 = Bus In Bit 5
50 = Bus In Bit 6
51 = Bus In Bit 7
52 = Salida mediante bus
P419 Normalización salida analógica
P
-500 ... 500 %
[ 100 ]
Funciones analógicas P418 (= 0…14, 30, 31)
Mediante este parámetro se puede adaptar la salida analógica al área de trabajo deseada. La salida analógica máxima (10V) equivale al valor de normalización de la selección correspondiente.
En consecuencia, si se incrementa este parámetro del 100% al 200% con un punto operativo constante, se divide por la mitad la tensión de salida analógica. 10 voltios de señal de salida equivalen entonces al doble del valor nominal.
En caso de valores negativos se invierte la lógica. Un valor nominal de 0% se emite entonces con 10V en la salida y -100% con 0V.
Funciones digitales P418 (= 15…27, 44…52)
En las funciones límite de corriente (= 17), límite de corriente de par (= 18) y límite de frecuencia (= 19), mediante este parámetro se puede ajustar el umbral de conmutación. En este caso, el valor 100% se refiere al valor nominal del motor correspondiente (ver también P435).
Con un valor negativo, la función de salida se emite negada (0/1 → 1/0).
P420 Función entrada digital 1
0 ... 62
[ 1 ]
Habilitación derecha como ajuste de fábrica
Se pueden programar diversas funciones. Éstas pueden tomarse de la siguiente tabla.
P421 Función entrada digital 2
0 ... 62
[ 2 ] Habilitación izquierda como ajuste de fábrica
Se pueden programar diversas funciones. Éstas pueden tomarse de la siguiente tabla.
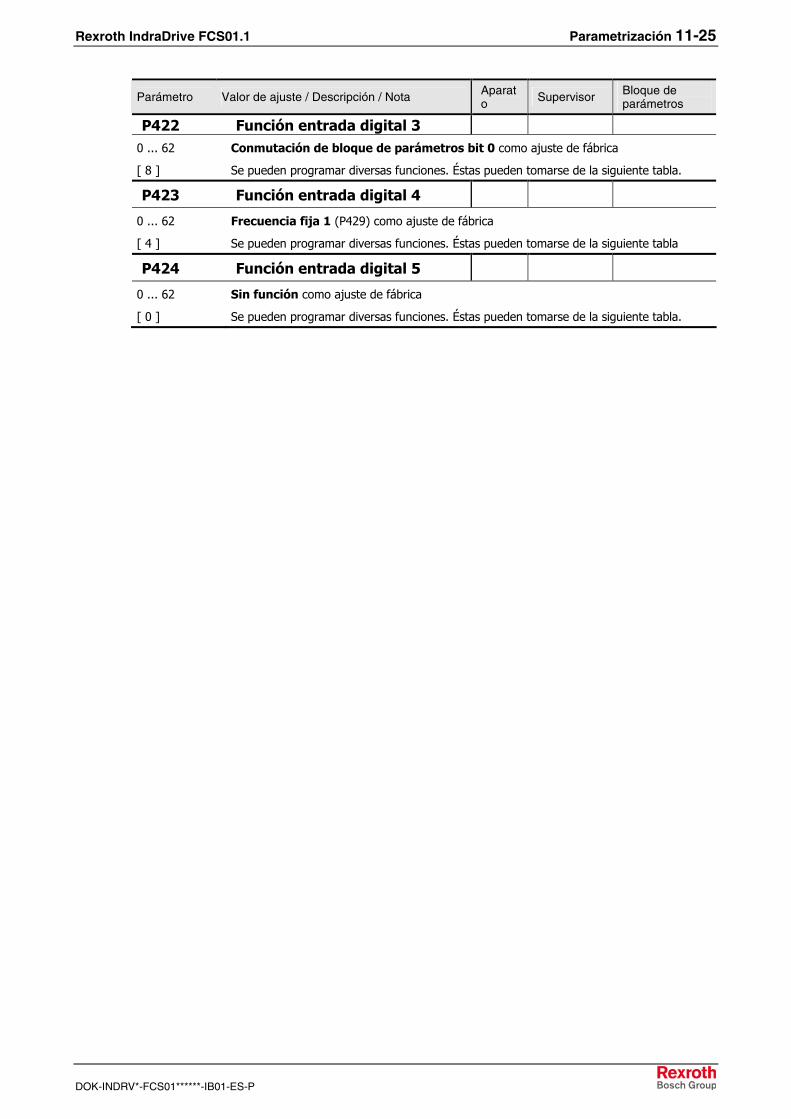
Rexroth IndraDrive FCS01.1 Parametrización 11-25
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de
parámetros
P422 Función entrada digital 3
0 ... 62
[ 8 ] Conmutación de bloque de parámetros bit 0 como ajuste de fábrica
Se pueden programar diversas funciones. Éstas pueden tomarse de la siguiente tabla.
P423 Función entrada digital 4
0 ... 62
[ 4 ] Frecuencia fija 1 (P429) como ajuste de fábrica
Se pueden programar diversas funciones. Éstas pueden tomarse de la siguiente tabla
P424 Función entrada digital 5
0 ... 62
[ 0 ] Sin función como ajuste de fábrica
Se pueden programar diversas funciones. Éstas pueden tomarse de la siguiente tabla.
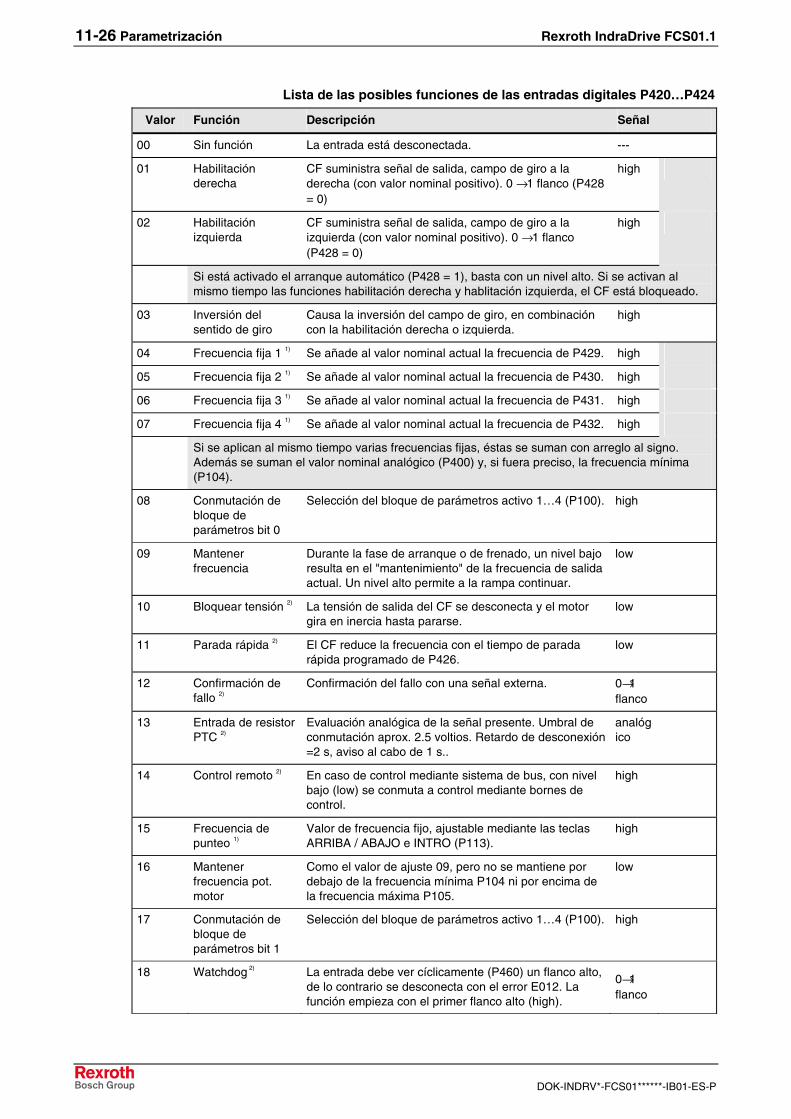
11-26 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Lista de las posibles funciones de las entradas digitales P420…P424
Valor Función Descripción Señal
00 Sin función La entrada está desconectada. ---
01 Habilitación derecha
CF suministra señal de salida, campo de giro a la derecha (con valor nominal positivo). 0 → 1 flanco (P428 = 0)
high
02 Habilitación izquierda
CF suministra señal de salida, campo de giro a la izquierda (con valor nominal positivo). 0 → 1 flanco (P428 = 0)
high
Si está activado el arranque automático (P428 = 1), basta con un nivel alto. Si se activan al mismo tiempo las funciones habilitación derecha y hablitación izquierda, el CF está bloqueado.
03 Inversión del sentido de giro
Causa la inversión del campo de giro, en combinación con la habilitación derecha o izquierda.
high
04 Frecuencia fija 1 1) Se añade al valor nominal actual la frecuencia de P429. high
05 Frecuencia fija 2 1) Se añade al valor nominal actual la frecuencia de P430. high
06 Frecuencia fija 3 1) Se añade al valor nominal actual la frecuencia de P431. high
07 Frecuencia fija 4 1) Se añade al valor nominal actual la frecuencia de P432. high
Si se aplican al mismo tiempo varias frecuencias fijas, éstas se suman con arreglo al signo. Además se suman el valor nominal analógico (P400) y, si fuera preciso, la frecuencia mínima (P104).
08 Conmutación de bloque de parámetros bit 0
Selección del bloque de parámetros activo 1…4 (P100). high
09 Mantener frecuencia
Durante la fase de arranque o de frenado, un nivel bajo resulta en el "mantenimiento" de la frecuencia de salida actual. Un nivel alto permite a la rampa continuar.
low
10 Bloquear tensión 2) La tensión de salida del CF se desconecta y el motor gira en inercia hasta pararse.
low
11 Parada rápida 2) El CF reduce la frecuencia con el tiempo de parada rápida programado de P426.
low
12 Confirmación de fallo 2)
Confirmación del fallo con una señal externa. 0→1 flanco
13 Entrada de resistor PTC 2)
Evaluación analógica de la señal presente. Umbral de conmutación aprox. 2.5 voltios. Retardo de desconexión =2 s, aviso al cabo de 1 s..
analógico
14 Control remoto 2) En caso de control mediante sistema de bus, con nivel bajo (low) se conmuta a control mediante bornes de control.
high
15 Frecuencia de punteo 1)
Valor de frecuencia fijo, ajustable mediante las teclas ARRIBA / ABAJO e INTRO (P113).
high
16 Mantener frecuencia pot. motor
Como el valor de ajuste 09, pero no se mantiene por debajo de la frecuencia mínima P104 ni por encima de la frecuencia máxima P105.
low
17 Conmutación de bloque de parámetros bit 1
Selección del bloque de parámetros activo 1…4 (P100). high
18 Watchdog 2) La entrada debe ver cíclicamente (P460) un flanco alto, de lo contrario se desconecta con el error E012. La función empieza con el primer flanco alto (high).
0→1 flanco
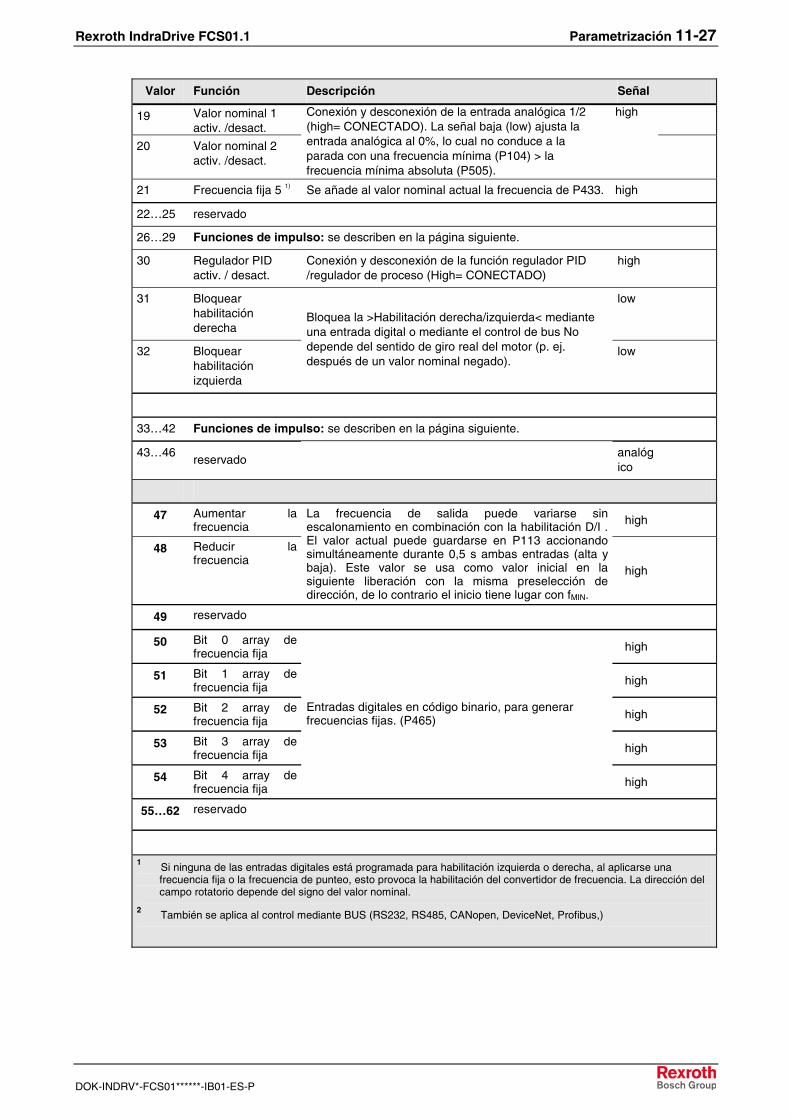
Rexroth IndraDrive FCS01.1 Parametrización 11-27
DOK-INDRV*-FCS01******-IB01-ES-P
Valor Función Descripción Señal
19 Valor nominal 1 activ. /desact.
20 Valor nominal 2 activ. /desact.
Conexión y desconexión de la entrada analógica 1/2 (high= CONECTADO). La señal baja (low) ajusta la entrada analógica al 0%, lo cual no conduce a la parada con una frecuencia mínima (P104) > la frecuencia mínima absoluta (P505).
high
21 Frecuencia fija 5 1) Se añade al valor nominal actual la frecuencia de P433. high
22…25 reservado
26…29 Funciones de impulso: se describen en la página siguiente.
30 Regulador PID activ. / desact.
Conexión y desconexión de la función regulador PID /regulador de proceso (High= CONECTADO)
high
31 Bloquear habilitación derecha
low
32 Bloquear habilitación izquierda
Bloquea la >Habilitación derecha/izquierda< mediante una entrada digital o mediante el control de bus No depende del sentido de giro real del motor (p. ej. después de un valor nominal negado).
low
33…42 Funciones de impulso: se describen en la página siguiente.
43…46 reservado
analógico
47 Aumentar la frecuencia high
48 Reducir la frecuencia
La frecuencia de salida puede variarse sin escalonamiento en combinación con la habilitación D/I . El valor actual puede guardarse en P113 accionando simultáneamente durante 0,5 s ambas entradas (alta y baja). Este valor se usa como valor inicial en la siguiente liberación con la misma preselección de dirección, de lo contrario el inicio tiene lugar con fMIN.
high
49 reservado
50 Bit 0 array de frecuencia fija high
51 Bit 1 array de frecuencia fija high
52 Bit 2 array de frecuencia fija high
53 Bit 3 array de frecuencia fija high
54 Bit 4 array de frecuencia fija
Entradas digitales en código binario, para generar frecuencias fijas. (P465)
high
55…62 reservado
1 Si ninguna de las entradas digitales está programada para habilitación izquierda o derecha, al aplicarse una frecuencia fija o la frecuencia de punteo, esto provoca la habilitación del convertidor de frecuencia. La dirección del campo rotatorio depende del signo del valor nominal.
2 También se aplica al control mediante BUS (RS232, RS485, CANopen, DeviceNet, Profibus,)
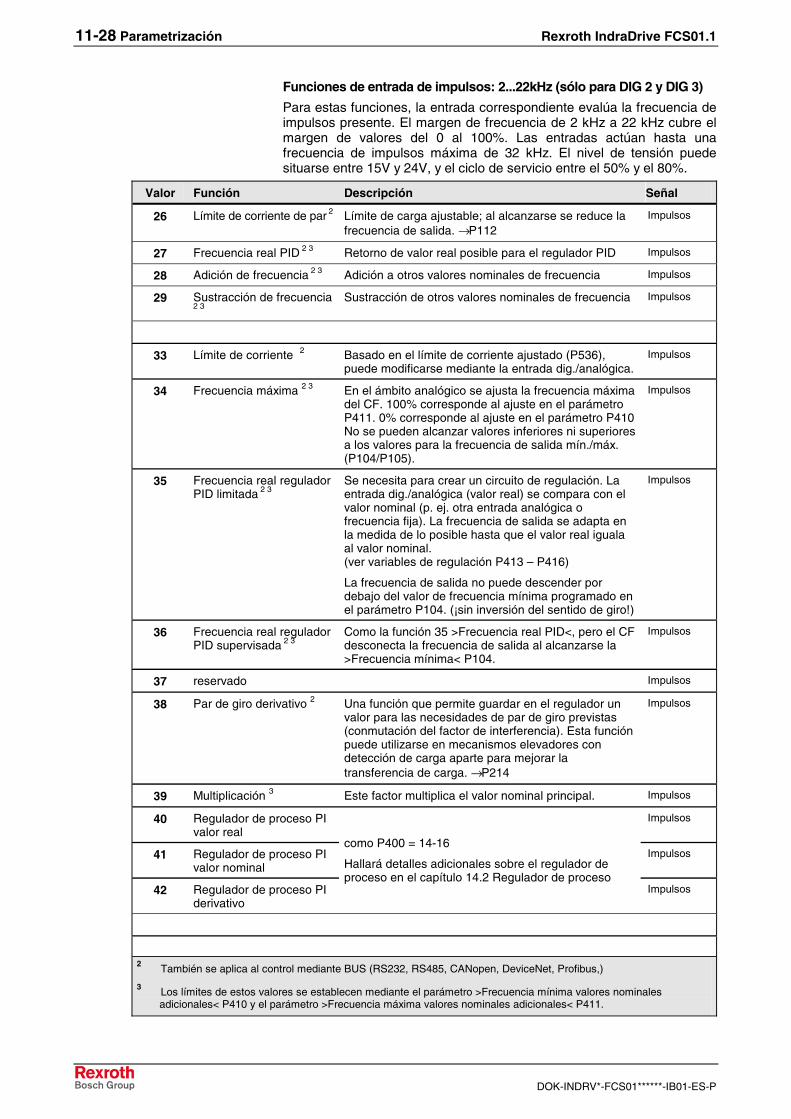
11-28 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Funciones de entrada de impulsos: 2...22kHz (sólo para DIG 2 y DIG 3)
Para estas funciones, la entrada correspondiente evalúa la frecuencia de impulsos presente. El margen de frecuencia de 2 kHz a 22 kHz cubre el margen de valores del 0 al 100%. Las entradas actúan hasta una frecuencia de impulsos máxima de 32 kHz. El nivel de tensión puede situarse entre 15V y 24V, y el ciclo de servicio entre el 50% y el 80%.
Valor Función Descripción Señal
26 Límite de corriente de par 2 Límite de carga ajustable; al alcanzarse se reduce la frecuencia de salida. → P112
Impulsos
27 Frecuencia real PID 2 3 Retorno de valor real posible para el regulador PID Impulsos
28 Adición de frecuencia 2 3 Adición a otros valores nominales de frecuencia Impulsos
29 Sustracción de frecuencia
2 3 Sustracción de otros valores nominales de frecuencia Impulsos
33 Límite de corriente 2 Basado en el límite de corriente ajustado (P536), puede modificarse mediante la entrada dig./analógica.
Impulsos
34 Frecuencia máxima 2 3
En el ámbito analógico se ajusta la frecuencia máxima del CF. 100% corresponde al ajuste en el parámetro P411. 0% corresponde al ajuste en el parámetro P410 No se pueden alcanzar valores inferiores ni superiores a los valores para la frecuencia de salida mín./máx. (P104/P105).
Impulsos
35 Frecuencia real regulador PID limitada 2 3
Se necesita para crear un circuito de regulación. La entrada dig./analógica (valor real) se compara con el valor nominal (p. ej. otra entrada analógica o frecuencia fija). La frecuencia de salida se adapta en la medida de lo posible hasta que el valor real iguala al valor nominal. (ver variables de regulación P413 – P416)
La frecuencia de salida no puede descender por debajo del valor de frecuencia mínima programado en el parámetro P104. (¡sin inversión del sentido de giro!)
Impulsos
36 Frecuencia real regulador PID supervisada 2 3
Como la función 35 >Frecuencia real PID<, pero el CF desconecta la frecuencia de salida al alcanzarse la >Frecuencia mínima< P104.
Impulsos
37 reservado Impulsos
38 Par de giro derivativo 2 Una función que permite guardar en el regulador un valor para las necesidades de par de giro previstas (conmutación del factor de interferencia). Esta función puede utilizarse en mecanismos elevadores con detección de carga aparte para mejorar la transferencia de carga. → P214
Impulsos
39 Multiplicación 3 Este factor multiplica el valor nominal principal. Impulsos
40 Regulador de proceso PI valor real
Impulsos
41 Regulador de proceso PI valor nominal
Impulsos
42 Regulador de proceso PI derivativo
como P400 = 14-16
Hallará detalles adicionales sobre el regulador de proceso en el capítulo 14.2 Regulador de proceso
Impulsos
2 También se aplica al control mediante BUS (RS232, RS485, CANopen, DeviceNet, Profibus,)
3 Los límites de estos valores se establecen mediante el parámetro >Frecuencia mínima valores nominales adicionales< P410 y el parámetro >Frecuencia máxima valores nominales adicionales< P411.
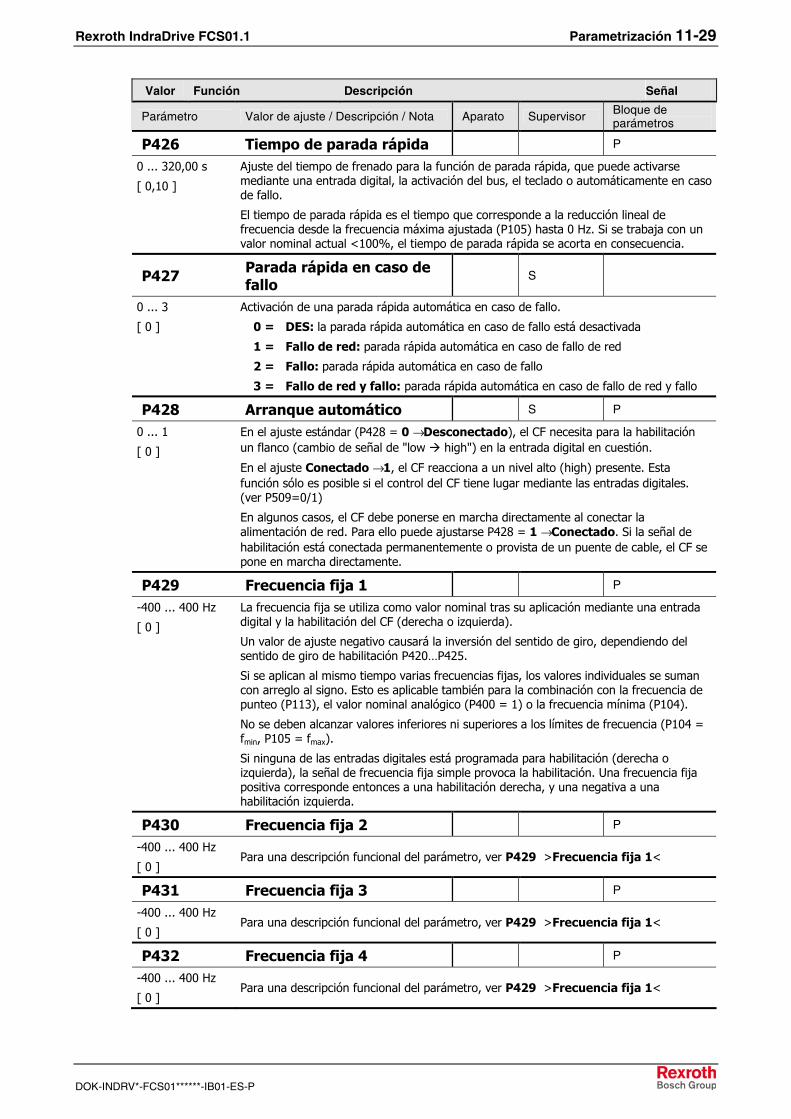
Rexroth IndraDrive FCS01.1 Parametrización 11-29
DOK-INDRV*-FCS01******-IB01-ES-P
Valor Función Descripción Señal
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de parámetros
P426 Tiempo de parada rápida P
0 ... 320,00 s
[ 0,10 ] Ajuste del tiempo de frenado para la función de parada rápida, que puede activarse mediante una entrada digital, la activación del bus, el teclado o automáticamente en caso de fallo.
El tiempo de parada rápida es el tiempo que corresponde a la reducción lineal de frecuencia desde la frecuencia máxima ajustada (P105) hasta 0 Hz. Si se trabaja con un valor nominal actual <100%, el tiempo de parada rápida se acorta en consecuencia.
P427 Parada rápida en caso de fallo
S
0 ... 3
[ 0 ] Activación de una parada rápida automática en caso de fallo.
0 = DES: la parada rápida automática en caso de fallo está desactivada
1 = Fallo de red: parada rápida automática en caso de fallo de red
2 = Fallo: parada rápida automática en caso de fallo
3 = Fallo de red y fallo: parada rápida automática en caso de fallo de red y fallo
P428 Arranque automático S P
0 ... 1
[ 0 ]
En el ajuste estándar (P428 = 0 → Desconectado), el CF necesita para la habilitación un flanco (cambio de señal de "low high") en la entrada digital en cuestión.
En el ajuste Conectado → 1, el CF reacciona a un nivel alto (high) presente. Esta función sólo es posible si el control del CF tiene lugar mediante las entradas digitales. (ver P509=0/1)
En algunos casos, el CF debe ponerse en marcha directamente al conectar la alimentación de red. Para ello puede ajustarse P428 = 1 → Conectado. Si la señal de habilitación está conectada permanentemente o provista de un puente de cable, el CF se pone en marcha directamente.
P429 Frecuencia fija 1 P
-400 ... 400 Hz
[ 0 ]
La frecuencia fija se utiliza como valor nominal tras su aplicación mediante una entrada digital y la habilitación del CF (derecha o izquierda).
Un valor de ajuste negativo causará la inversión del sentido de giro, dependiendo del sentido de giro de habilitación P420…P425.
Si se aplican al mismo tiempo varias frecuencias fijas, los valores individuales se suman con arreglo al signo. Esto es aplicable también para la combinación con la frecuencia de punteo (P113), el valor nominal analógico (P400 = 1) o la frecuencia mínima (P104).
No se deben alcanzar valores inferiores ni superiores a los límites de frecuencia (P104 = fmin, P105 = fmax).
Si ninguna de las entradas digitales está programada para habilitación (derecha o izquierda), la señal de frecuencia fija simple provoca la habilitación. Una frecuencia fija positiva corresponde entonces a una habilitación derecha, y una negativa a una habilitación izquierda.
P430 Frecuencia fija 2 P
-400 ... 400 Hz
[ 0 ] Para una descripción funcional del parámetro, ver P429 >Frecuencia fija 1<
P431 Frecuencia fija 3 P
-400 ... 400 Hz
[ 0 ] Para una descripción funcional del parámetro, ver P429 >Frecuencia fija 1<
P432 Frecuencia fija 4 P
-400 ... 400 Hz
[ 0 ] Para una descripción funcional del parámetro, ver P429 >Frecuencia fija 1<
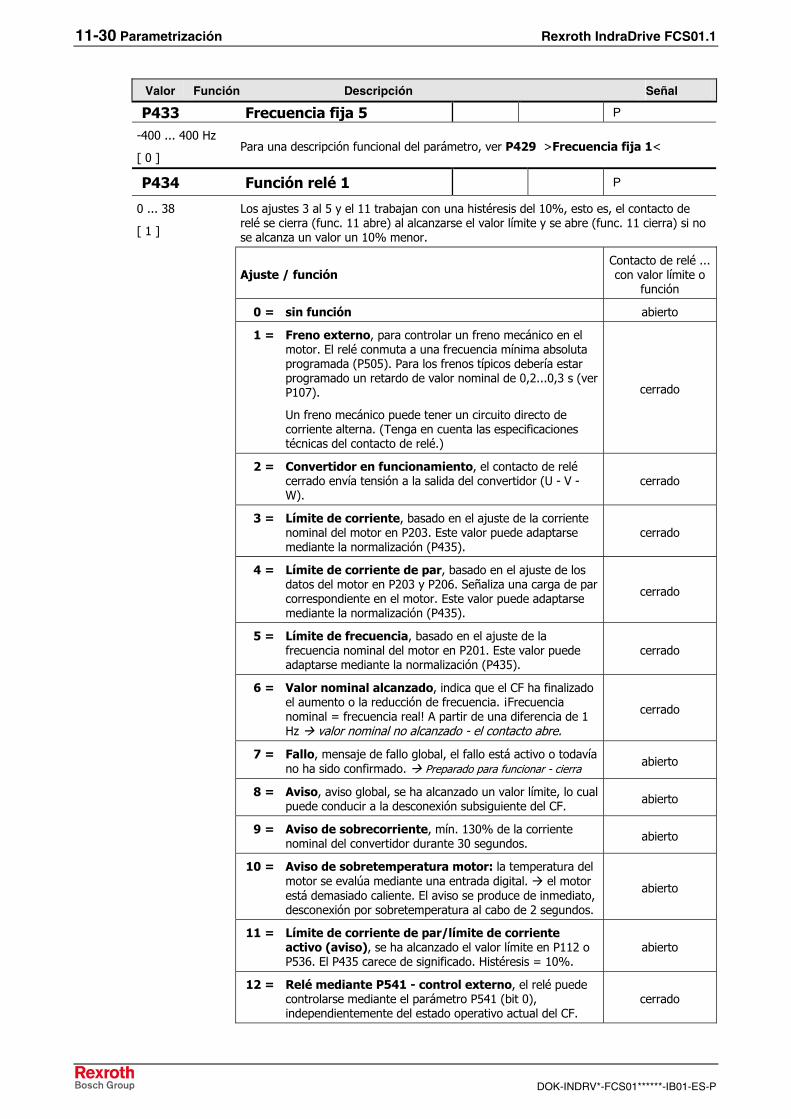
11-30 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Valor Función Descripción Señal
P433 Frecuencia fija 5 P
-400 ... 400 Hz
[ 0 ] Para una descripción funcional del parámetro, ver P429 >Frecuencia fija 1<
P434 Función relé 1 P
Los ajustes 3 al 5 y el 11 trabajan con una histéresis del 10%, esto es, el contacto de relé se cierra (func. 11 abre) al alcanzarse el valor límite y se abre (func. 11 cierra) si no se alcanza un valor un 10% menor.
Ajuste / función Contacto de relé ... con valor límite o
función
0 = sin función abierto
1 = Freno externo, para controlar un freno mecánico en el motor. El relé conmuta a una frecuencia mínima absoluta programada (P505). Para los frenos típicos debería estar programado un retardo de valor nominal de 0,2...0,3 s (ver P107).
Un freno mecánico puede tener un circuito directo de corriente alterna. (Tenga en cuenta las especificaciones técnicas del contacto de relé.)
cerrado
2 = Convertidor en funcionamiento, el contacto de relé cerrado envía tensión a la salida del convertidor (U - V - W).
cerrado
3 = Límite de corriente, basado en el ajuste de la corriente nominal del motor en P203. Este valor puede adaptarse mediante la normalización (P435).
cerrado
4 = Límite de corriente de par, basado en el ajuste de los datos del motor en P203 y P206. Señaliza una carga de par correspondiente en el motor. Este valor puede adaptarse mediante la normalización (P435).
cerrado
5 = Límite de frecuencia, basado en el ajuste de la frecuencia nominal del motor en P201. Este valor puede adaptarse mediante la normalización (P435).
cerrado
6 = Valor nominal alcanzado, indica que el CF ha finalizado el aumento o la reducción de frecuencia. ¡Frecuencia nominal = frecuencia real! A partir de una diferencia de 1 Hz valor nominal no alcanzado - el contacto abre.
cerrado
7 = Fallo, mensaje de fallo global, el fallo está activo o todavía no ha sido confirmado. Preparado para funcionar - cierra abierto
8 = Aviso, aviso global, se ha alcanzado un valor límite, lo cual puede conducir a la desconexión subsiguiente del CF. abierto
9 = Aviso de sobrecorriente, mín. 130% de la corriente nominal del convertidor durante 30 segundos. abierto
10 = Aviso de sobretemperatura motor: la temperatura del motor se evalúa mediante una entrada digital. el motor está demasiado caliente. El aviso se produce de inmediato, desconexión por sobretemperatura al cabo de 2 segundos.
abierto
11 = Límite de corriente de par/límite de corriente activo (aviso), se ha alcanzado el valor límite en P112 o P536. El P435 carece de significado. Histéresis = 10%.
abierto
0 ... 38
[ 1 ]
12 = Relé mediante P541 - control externo, el relé puede controlarse mediante el parámetro P541 (bit 0), independientemente del estado operativo actual del CF.
cerrado
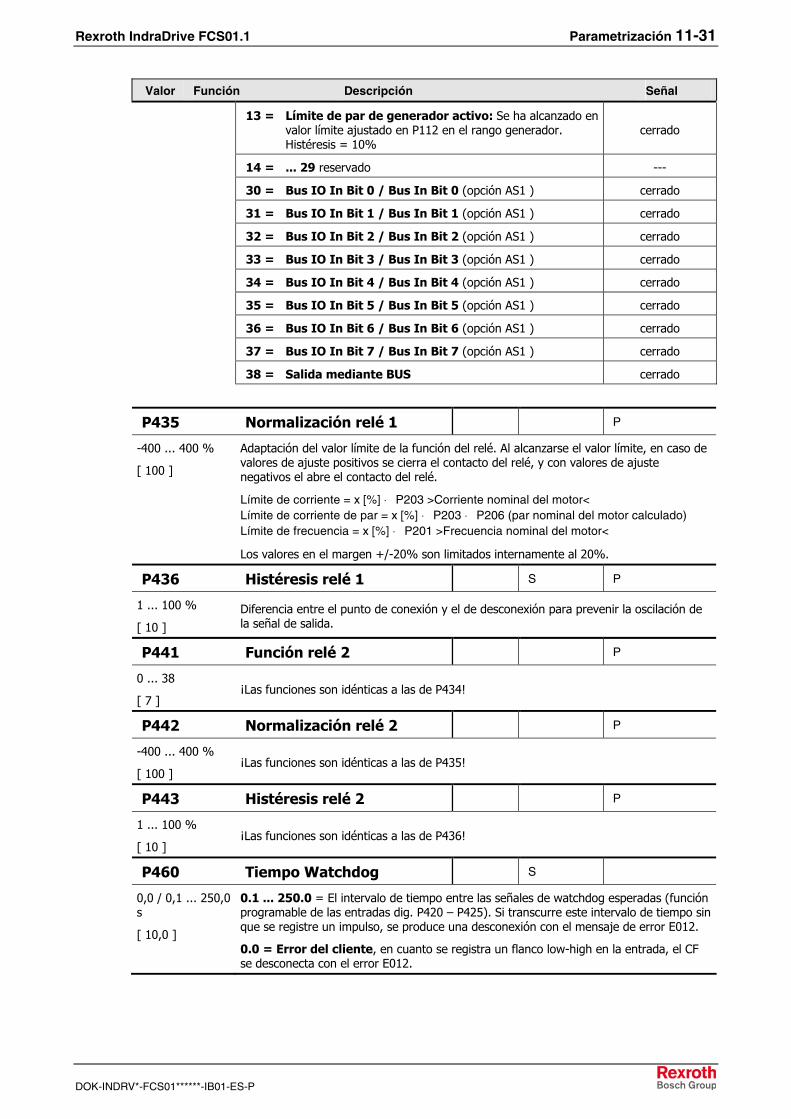
Rexroth IndraDrive FCS01.1 Parametrización 11-31
DOK-INDRV*-FCS01******-IB01-ES-P
Valor Función Descripción Señal
13 = Límite de par de generador activo: Se ha alcanzado en valor límite ajustado en P112 en el rango generador. Histéresis = 10%
cerrado
14 = ... 29 reservado ---
30 = Bus IO In Bit 0 / Bus In Bit 0 (opción AS1 ) cerrado
31 = Bus IO In Bit 1 / Bus In Bit 1 (opción AS1 ) cerrado
32 = Bus IO In Bit 2 / Bus In Bit 2 (opción AS1 ) cerrado
33 = Bus IO In Bit 3 / Bus In Bit 3 (opción AS1 ) cerrado
34 = Bus IO In Bit 4 / Bus In Bit 4 (opción AS1 ) cerrado
35 = Bus IO In Bit 5 / Bus In Bit 5 (opción AS1 ) cerrado
36 = Bus IO In Bit 6 / Bus In Bit 6 (opción AS1 ) cerrado
37 = Bus IO In Bit 7 / Bus In Bit 7 (opción AS1 ) cerrado
38 = Salida mediante BUS cerrado
P435 Normalización relé 1 P
-400 ... 400 %
[ 100 ] Adaptación del valor límite de la función del relé. Al alcanzarse el valor límite, en caso de valores de ajuste positivos se cierra el contacto del relé, y con valores de ajuste negativos el abre el contacto del relé.
Límite de corriente = x [%] ⋅ P203 >Corriente nominal del motor< Límite de corriente de par = x [%] ⋅ P203 ⋅ P206 (par nominal del motor calculado) Límite de frecuencia = x [%] ⋅ P201 >Frecuencia nominal del motor<
Los valores en el margen +/-20% son limitados internamente al 20%.
P436 Histéresis relé 1 S P
1 ... 100 %
[ 10 ] Diferencia entre el punto de conexión y el de desconexión para prevenir la oscilación de la señal de salida.
P441 Función relé 2 P
0 ... 38
[ 7 ] ¡Las funciones son idénticas a las de P434!
P442 Normalización relé 2 P
-400 ... 400 %
[ 100 ] ¡Las funciones son idénticas a las de P435!
P443 Histéresis relé 2 P
1 ... 100 %
[ 10 ] ¡Las funciones son idénticas a las de P436!
P460 Tiempo Watchdog S
0,0 / 0,1 ... 250,0 s
[ 10,0 ]
0.1 ... 250.0 = El intervalo de tiempo entre las señales de watchdog esperadas (función programable de las entradas dig. P420 – P425). Si transcurre este intervalo de tiempo sin que se registre un impulso, se produce una desconexión con el mensaje de error E012.
0.0 = Error del cliente, en cuanto se registra un flanco low-high en la entrada, el CF se desconecta con el error E012.
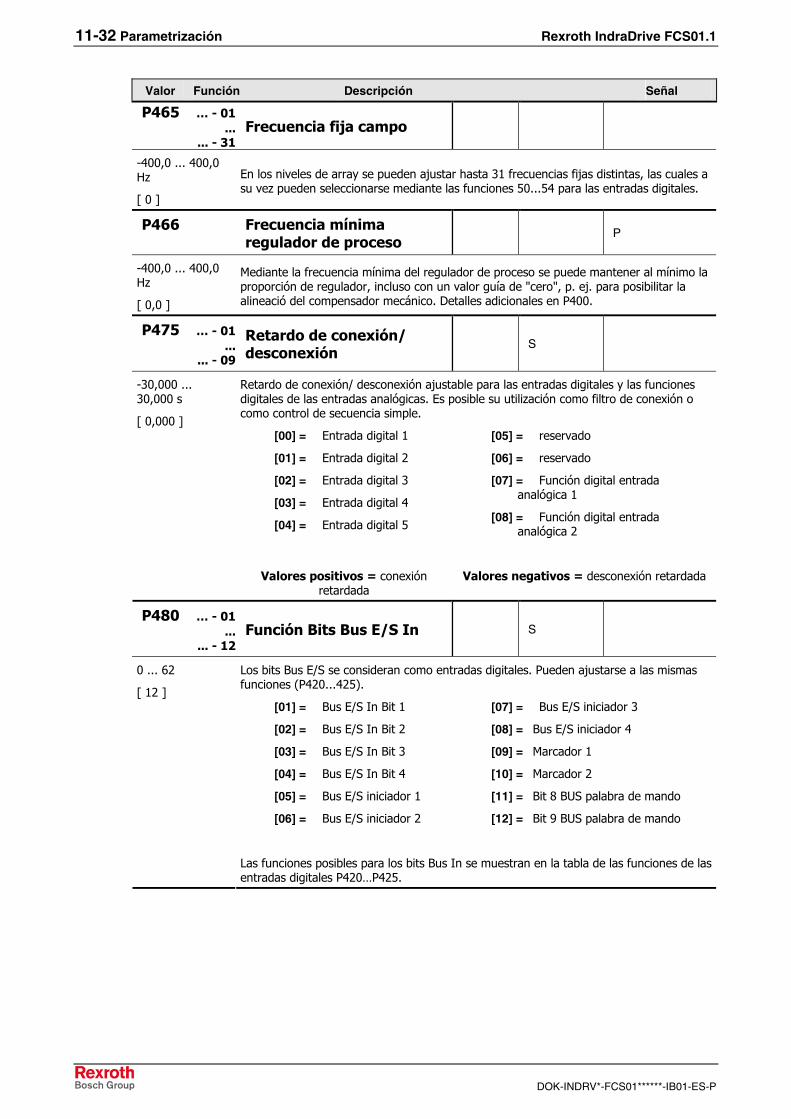
11-32 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Valor Función Descripción Señal
P465 … - 01 ... ... - 31
Frecuencia fija campo
-400,0 ... 400,0 Hz
[ 0 ]
En los niveles de array se pueden ajustar hasta 31 frecuencias fijas distintas, las cuales a su vez pueden seleccionarse mediante las funciones 50...54 para las entradas digitales.
P466 Frecuencia mínima regulador de proceso
P
-400,0 ... 400,0 Hz
[ 0,0 ]
Mediante la frecuencia mínima del regulador de proceso se puede mantener al mínimo la proporción de regulador, incluso con un valor guía de "cero", p. ej. para posibilitar la alineació del compensador mecánico. Detalles adicionales en P400.
P475 … - 01 ... ... - 09
Retardo de conexión/ desconexión
S
Retardo de conexión/ desconexión ajustable para las entradas digitales y las funciones digitales de las entradas analógicas. Es posible su utilización como filtro de conexión o como control de secuencia simple.
[00] = Entrada digital 1
[01] = Entrada digital 2
[02] = Entrada digital 3
[03] = Entrada digital 4
[04] = Entrada digital 5
[05] = reservado
[06] = reservado
[07] = Función digital entrada analógica 1
[08] = Función digital entrada analógica 2
-30,000 ... 30,000 s
[ 0,000 ]
Valores positivos = conexión retardada
Valores negativos = desconexión retardada
P480 … - 01 ... ... - 12
Función Bits Bus E/S In S
Los bits Bus E/S se consideran como entradas digitales. Pueden ajustarse a las mismas funciones (P420...425).
[01] = Bus E/S In Bit 1
[02] = Bus E/S In Bit 2
[03] = Bus E/S In Bit 3
[04] = Bus E/S In Bit 4
[05] = Bus E/S iniciador 1
[06] = Bus E/S iniciador 2
[07] = Bus E/S iniciador 3
[08] = Bus E/S iniciador 4
[09] = Marcador 1
[10] = Marcador 2
[11] = Bit 8 BUS palabra de mando
[12] = Bit 9 BUS palabra de mando
0 ... 62
[ 12 ]
Las funciones posibles para los bits Bus In se muestran en la tabla de las funciones de las entradas digitales P420…P425.
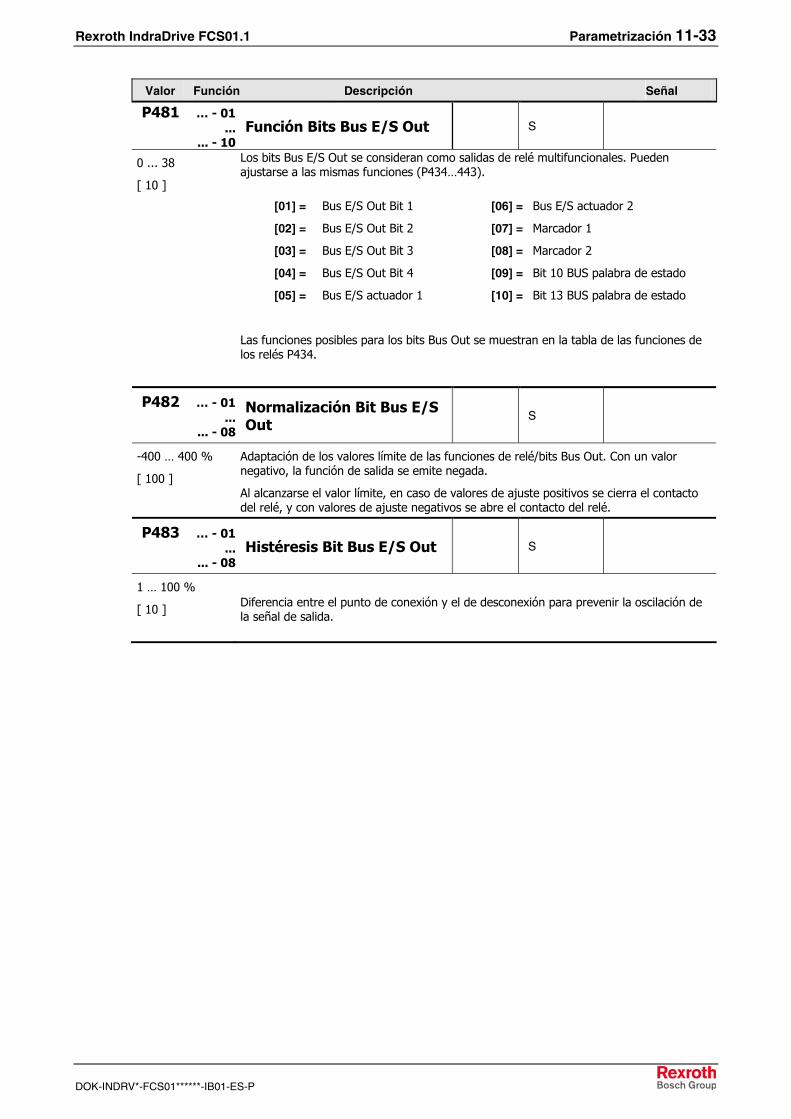
Rexroth IndraDrive FCS01.1 Parametrización 11-33
DOK-INDRV*-FCS01******-IB01-ES-P
Valor Función Descripción Señal
P481 … - 01 ... ... - 10
Función Bits Bus E/S Out S
Los bits Bus E/S Out se consideran como salidas de relé multifuncionales. Pueden ajustarse a las mismas funciones (P434…443).
[01] = Bus E/S Out Bit 1
[02] = Bus E/S Out Bit 2
[03] = Bus E/S Out Bit 3
[04] = Bus E/S Out Bit 4
[05] = Bus E/S actuador 1
[06] = Bus E/S actuador 2
[07] = Marcador 1
[08] = Marcador 2
[09] = Bit 10 BUS palabra de estado
[10] = Bit 13 BUS palabra de estado
0 ... 38
[ 10 ]
Las funciones posibles para los bits Bus Out se muestran en la tabla de las funciones de los relés P434.
P482 … - 01 ... ... - 08
Normalización Bit Bus E/S Out
S
-400 … 400 %
[ 100 ]
Adaptación de los valores límite de las funciones de relé/bits Bus Out. Con un valor negativo, la función de salida se emite negada.
Al alcanzarse el valor límite, en caso de valores de ajuste positivos se cierra el contacto del relé, y con valores de ajuste negativos se abre el contacto del relé.
P483 … - 01 ... ... - 08
Histéresis Bit Bus E/S Out S
1 … 100 %
[ 10 ]
Diferencia entre el punto de conexión y el de desconexión para prevenir la oscilación de la señal de salida.
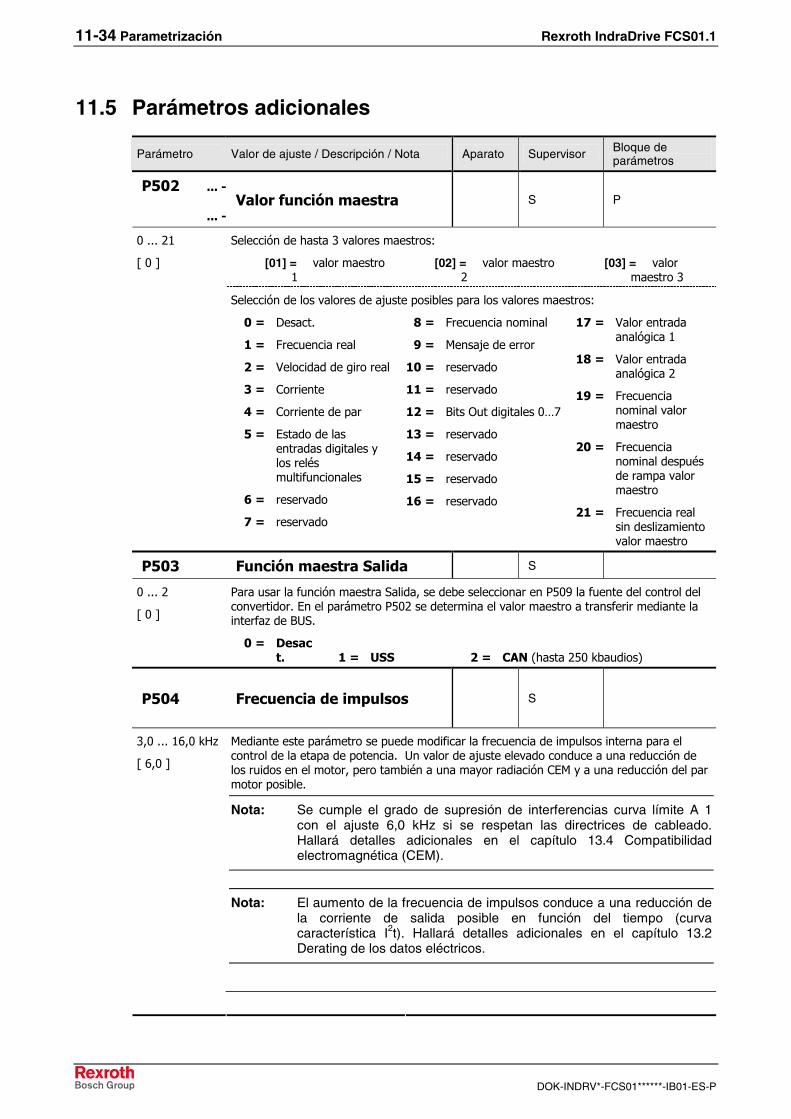
11-34 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
11.5 Parámetros adicionales
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de parámetros
P502 ... - ... -
Valor función maestra S P
Selección de hasta 3 valores maestros:
[01] = valor maestro 1
[02] = valor maestro 2
[03] = valor maestro 3
Selección de los valores de ajuste posibles para los valores maestros:
0 ... 21
[ 0 ]
0 = Desact.
1 = Frecuencia real
2 = Velocidad de giro real
3 = Corriente
4 = Corriente de par
5 = Estado de las entradas digitales y los relés multifuncionales
6 = reservado
7 = reservado
8 = Frecuencia nominal
9 = Mensaje de error
10 = reservado
11 = reservado
12 = Bits Out digitales 0…7
13 = reservado
14 = reservado
15 = reservado
16 = reservado
17 = Valor entrada analógica 1
18 = Valor entrada analógica 2
19 = Frecuencia nominal valor maestro
20 = Frecuencia nominal después de rampa valor maestro
21 = Frecuencia real sin deslizamiento valor maestro
P503 Función maestra Salida S
Para usar la función maestra Salida, se debe seleccionar en P509 la fuente del control del convertidor. En el parámetro P502 se determina el valor maestro a transferir mediante la interfaz de BUS.
0 ... 2
[ 0 ]
0 = Desact. 1 = USS 2 = CAN (hasta 250 kbaudios)
P504 Frecuencia de impulsos S
Mediante este parámetro se puede modificar la frecuencia de impulsos interna para el control de la etapa de potencia. Un valor de ajuste elevado conduce a una reducción de los ruidos en el motor, pero también a una mayor radiación CEM y a una reducción del par motor posible.
Nota: Se cumple el grado de supresión de interferencias curva límite A 1 con el ajuste 6,0 kHz si se respetan las directrices de cableado. Hallará detalles adicionales en el capítulo 13.4 Compatibilidad electromagnética (CEM).
Nota: El aumento de la frecuencia de impulsos conduce a una reducción de la corriente de salida posible en función del tiempo (curva característica I2t). Hallará detalles adicionales en el capítulo 13.2 Derating de los datos eléctricos.
3,0 ... 16,0 kHz
[ 6,0 ]
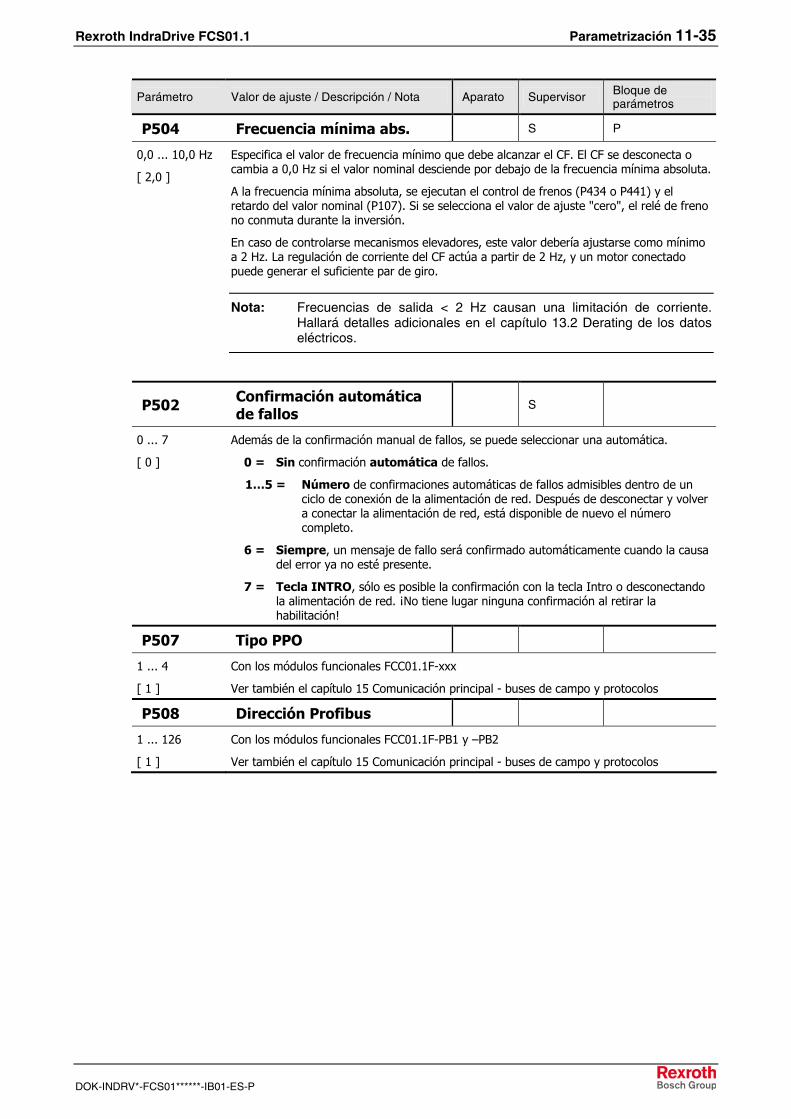
Rexroth IndraDrive FCS01.1 Parametrización 11-35
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de parámetros
P504 Frecuencia mínima abs. S P
0,0 ... 10,0 Hz
[ 2,0 ]
Especifica el valor de frecuencia mínimo que debe alcanzar el CF. El CF se desconecta o cambia a 0,0 Hz si el valor nominal desciende por debajo de la frecuencia mínima absoluta.
A la frecuencia mínima absoluta, se ejecutan el control de frenos (P434 o P441) y el retardo del valor nominal (P107). Si se selecciona el valor de ajuste "cero", el relé de freno no conmuta durante la inversión.
En caso de controlarse mecanismos elevadores, este valor debería ajustarse como mínimo a 2 Hz. La regulación de corriente del CF actúa a partir de 2 Hz, y un motor conectado puede generar el suficiente par de giro.
Nota: Frecuencias de salida < 2 Hz causan una limitación de corriente. Hallará detalles adicionales en el capítulo 13.2 Derating de los datos eléctricos.
P502 Confirmación automática de fallos
S
0 ... 7
[ 0 ]
Además de la confirmación manual de fallos, se puede seleccionar una automática.
0 = Sin confirmación automática de fallos.
1…5 = Número de confirmaciones automáticas de fallos admisibles dentro de un ciclo de conexión de la alimentación de red. Después de desconectar y volver a conectar la alimentación de red, está disponible de nuevo el número completo.
6 = Siempre, un mensaje de fallo será confirmado automáticamente cuando la causa del error ya no esté presente.
7 = Tecla INTRO, sólo es posible la confirmación con la tecla Intro o desconectando la alimentación de red. ¡No tiene lugar ninguna confirmación al retirar la habilitación!
P507 Tipo PPO
1 ... 4
[ 1 ]
Con los módulos funcionales FCC01.1F-xxx
Ver también el capítulo 15 Comunicación principal - buses de campo y protocolos
P508 Dirección Profibus
1 ... 126
[ 1 ]
Con los módulos funcionales FCC01.1F-PB1 y –PB2
Ver también el capítulo 15 Comunicación principal - buses de campo y protocolos
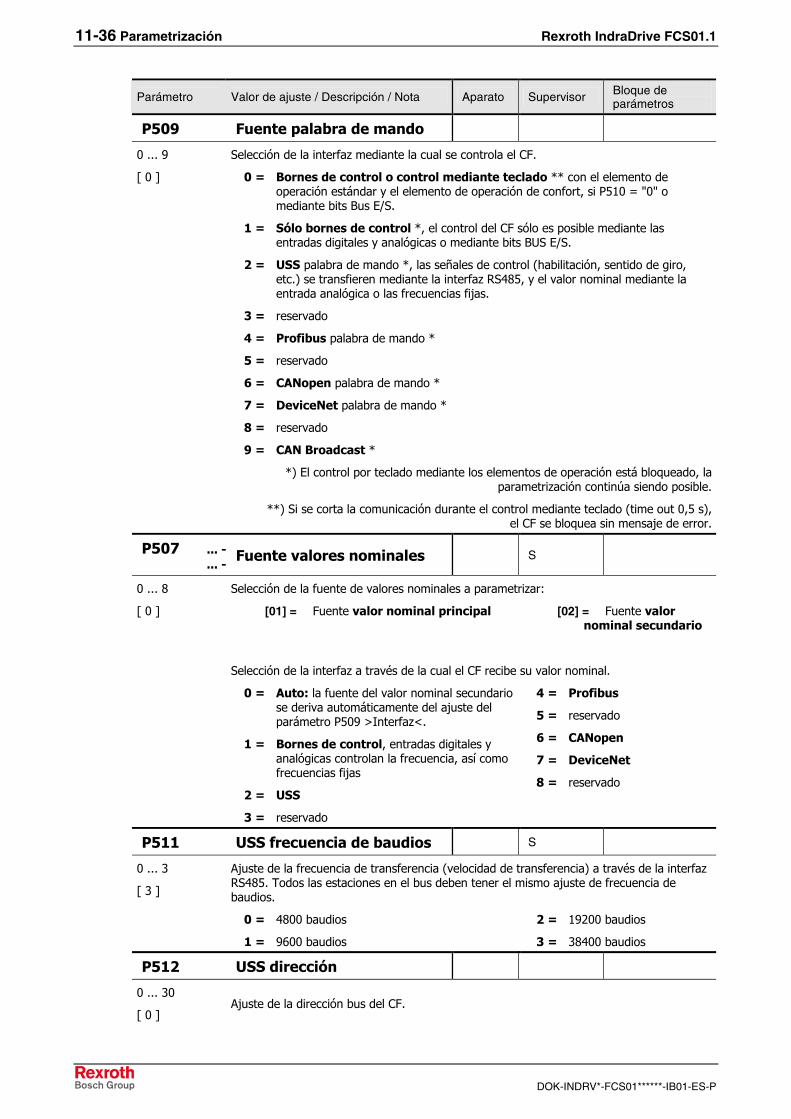
11-36 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de parámetros
P509 Fuente palabra de mando
0 ... 9
[ 0 ]
Selección de la interfaz mediante la cual se controla el CF.
0 = Bornes de control o control mediante teclado ** con el elemento de operación estándar y el elemento de operación de confort, si P510 = "0" o mediante bits Bus E/S.
1 = Sólo bornes de control *, el control del CF sólo es posible mediante las entradas digitales y analógicas o mediante bits BUS E/S.
2 = USS palabra de mando *, las señales de control (habilitación, sentido de giro, etc.) se transfieren mediante la interfaz RS485, y el valor nominal mediante la entrada analógica o las frecuencias fijas.
3 = reservado
4 = Profibus palabra de mando *
5 = reservado
6 = CANopen palabra de mando *
7 = DeviceNet palabra de mando *
8 = reservado
9 = CAN Broadcast *
*) El control por teclado mediante los elementos de operación está bloqueado, la parametrización continúa siendo posible.
**) Si se corta la comunicación durante el control mediante teclado (time out 0,5 s), el CF se bloquea sin mensaje de error.
P507 ... - ... -
Fuente valores nominales S
Selección de la fuente de valores nominales a parametrizar:
[01] = Fuente valor nominal principal [02] = Fuente valor nominal secundario
Selección de la interfaz a través de la cual el CF recibe su valor nominal.
0 ... 8
[ 0 ]
0 = Auto: la fuente del valor nominal secundario se deriva automáticamente del ajuste del parámetro P509 >Interfaz<.
1 = Bornes de control, entradas digitales y analógicas controlan la frecuencia, así como frecuencias fijas
2 = USS
3 = reservado
4 = Profibus
5 = reservado
6 = CANopen
7 = DeviceNet
8 = reservado
P511 USS frecuencia de baudios S
Ajuste de la frecuencia de transferencia (velocidad de transferencia) a través de la interfaz RS485. Todos las estaciones en el bus deben tener el mismo ajuste de frecuencia de baudios.
0 ... 3
[ 3 ]
0 = 4800 baudios
1 = 9600 baudios
2 = 19200 baudios
3 = 38400 baudios
P512 USS dirección
0 ... 30
[ 0 ] Ajuste de la dirección bus del CF.
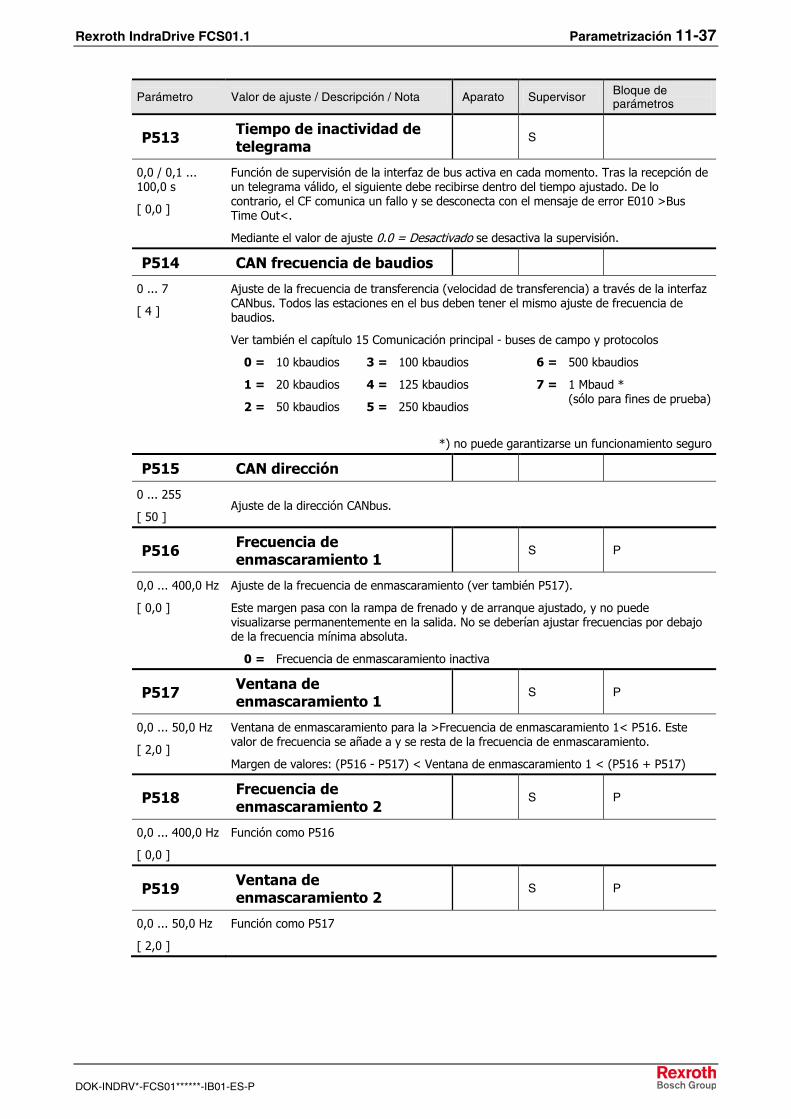
Rexroth IndraDrive FCS01.1 Parametrización 11-37
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de parámetros
P513 Tiempo de inactividad de telegrama
S
0,0 / 0,1 ... 100,0 s
[ 0,0 ]
Función de supervisión de la interfaz de bus activa en cada momento. Tras la recepción de un telegrama válido, el siguiente debe recibirse dentro del tiempo ajustado. De lo contrario, el CF comunica un fallo y se desconecta con el mensaje de error E010 >Bus Time Out<.
Mediante el valor de ajuste 0.0 = Desactivado se desactiva la supervisión.
P514 CAN frecuencia de baudios
Ajuste de la frecuencia de transferencia (velocidad de transferencia) a través de la interfaz CANbus. Todos las estaciones en el bus deben tener el mismo ajuste de frecuencia de baudios.
Ver también el capítulo 15 Comunicación principal - buses de campo y protocolos
0 = 10 kbaudios
1 = 20 kbaudios
2 = 50 kbaudios
3 = 100 kbaudios
4 = 125 kbaudios
5 = 250 kbaudios
6 = 500 kbaudios
7 = 1 Mbaud * (sólo para fines de prueba)
0 ... 7
[ 4 ]
*) no puede garantizarse un funcionamiento seguro
P515 CAN dirección
0 ... 255
[ 50 ] Ajuste de la dirección CANbus.
P516 Frecuencia de enmascaramiento 1
S P
0,0 ... 400,0 Hz
[ 0,0 ]
Ajuste de la frecuencia de enmascaramiento (ver también P517).
Este margen pasa con la rampa de frenado y de arranque ajustado, y no puede visualizarse permanentemente en la salida. No se deberían ajustar frecuencias por debajo de la frecuencia mínima absoluta.
0 = Frecuencia de enmascaramiento inactiva
P517 Ventana de enmascaramiento 1
S P
0,0 ... 50,0 Hz
[ 2,0 ]
Ventana de enmascaramiento para la >Frecuencia de enmascaramiento 1< P516. Este valor de frecuencia se añade a y se resta de la frecuencia de enmascaramiento.
Margen de valores: (P516 - P517) < Ventana de enmascaramiento 1 < (P516 + P517)
P518 Frecuencia de enmascaramiento 2
S P
0,0 ... 400,0 Hz
[ 0,0 ]
Función como P516
P519 Ventana de enmascaramiento 2
S P
0,0 ... 50,0 Hz
[ 2,0 ]
Función como P517
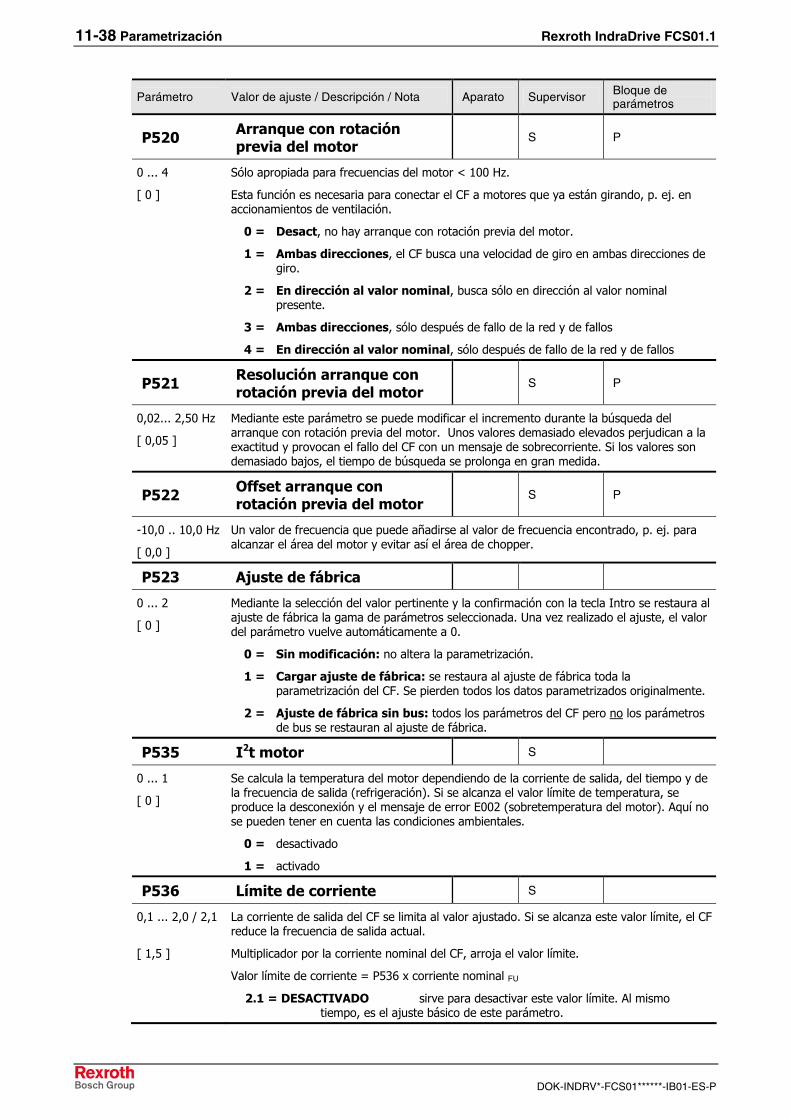
11-38 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de parámetros
P520 Arranque con rotación previa del motor
S P
0 ... 4
[ 0 ]
Sólo apropiada para frecuencias del motor < 100 Hz.
Esta función es necesaria para conectar el CF a motores que ya están girando, p. ej. en accionamientos de ventilación.
0 = Desact, no hay arranque con rotación previa del motor.
1 = Ambas direcciones, el CF busca una velocidad de giro en ambas direcciones de giro.
2 = En dirección al valor nominal, busca sólo en dirección al valor nominal presente.
3 = Ambas direcciones, sólo después de fallo de la red y de fallos
4 = En dirección al valor nominal, sólo después de fallo de la red y de fallos
P521 Resolución arranque con rotación previa del motor
S P
0,02... 2,50 Hz
[ 0,05 ]
Mediante este parámetro se puede modificar el incremento durante la búsqueda del arranque con rotación previa del motor. Unos valores demasiado elevados perjudican a la exactitud y provocan el fallo del CF con un mensaje de sobrecorriente. Si los valores son demasiado bajos, el tiempo de búsqueda se prolonga en gran medida.
P522 Offset arranque con rotación previa del motor
S P
-10,0 .. 10,0 Hz
[ 0,0 ]
Un valor de frecuencia que puede añadirse al valor de frecuencia encontrado, p. ej. para alcanzar el área del motor y evitar así el área de chopper.
P523 Ajuste de fábrica
0 ... 2
[ 0 ]
Mediante la selección del valor pertinente y la confirmación con la tecla Intro se restaura al ajuste de fábrica la gama de parámetros seleccionada. Una vez realizado el ajuste, el valor del parámetro vuelve automáticamente a 0.
0 = Sin modificación: no altera la parametrización.
1 = Cargar ajuste de fábrica: se restaura al ajuste de fábrica toda la parametrización del CF. Se pierden todos los datos parametrizados originalmente.
2 = Ajuste de fábrica sin bus: todos los parámetros del CF pero no los parámetros de bus se restauran al ajuste de fábrica.
P535 I2t motor S
0 ... 1
[ 0 ]
Se calcula la temperatura del motor dependiendo de la corriente de salida, del tiempo y de la frecuencia de salida (refrigeración). Si se alcanza el valor límite de temperatura, se produce la desconexión y el mensaje de error E002 (sobretemperatura del motor). Aquí no se pueden tener en cuenta las condiciones ambientales.
0 = desactivado
1 = activado
P536 Límite de corriente S
0,1 ... 2,0 / 2,1
[ 1,5 ]
La corriente de salida del CF se limita al valor ajustado. Si se alcanza este valor límite, el CF reduce la frecuencia de salida actual.
Multiplicador por la corriente nominal del CF, arroja el valor límite.
Valor límite de corriente = P536 x corriente nominal FU
2.1 = DESACTIVADO sirve para desactivar este valor límite. Al mismo tiempo, es el ajuste básico de este parámetro.
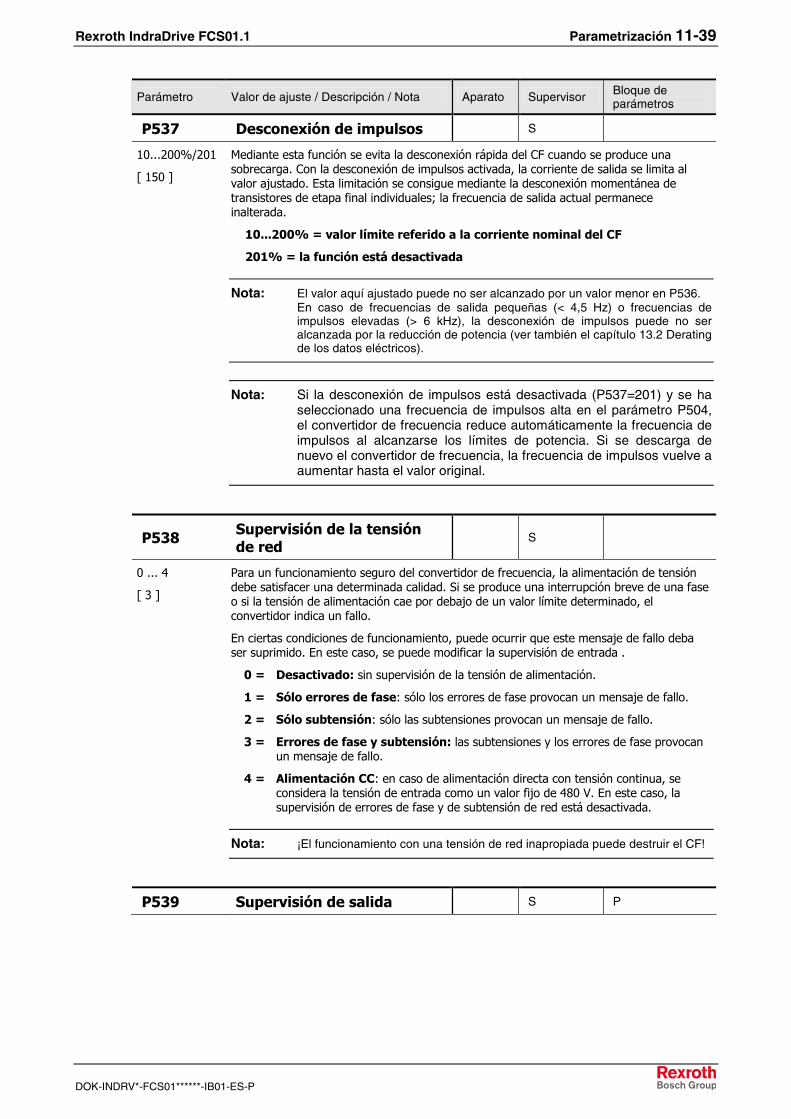
Rexroth IndraDrive FCS01.1 Parametrización 11-39
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de parámetros
P537 Desconexión de impulsos S
10...200%/201
[ 150 ]
Mediante esta función se evita la desconexión rápida del CF cuando se produce una sobrecarga. Con la desconexión de impulsos activada, la corriente de salida se limita al valor ajustado. Esta limitación se consigue mediante la desconexión momentánea de transistores de etapa final individuales; la frecuencia de salida actual permanece inalterada.
10...200% = valor límite referido a la corriente nominal del CF
201% = la función está desactivada
Nota: El valor aquí ajustado puede no ser alcanzado por un valor menor en P536. En caso de frecuencias de salida pequeñas (< 4,5 Hz) o frecuencias de impulsos elevadas (> 6 kHz), la desconexión de impulsos puede no ser alcanzada por la reducción de potencia (ver también el capítulo 13.2 Derating de los datos eléctricos).
Nota: Si la desconexión de impulsos está desactivada (P537=201) y se ha seleccionado una frecuencia de impulsos alta en el parámetro P504, el convertidor de frecuencia reduce automáticamente la frecuencia de impulsos al alcanzarse los límites de potencia. Si se descarga de nuevo el convertidor de frecuencia, la frecuencia de impulsos vuelve a aumentar hasta el valor original.
P538 Supervisión de la tensión de red
S
0 ... 4
[ 3 ]
Para un funcionamiento seguro del convertidor de frecuencia, la alimentación de tensión debe satisfacer una determinada calidad. Si se produce una interrupción breve de una fase o si la tensión de alimentación cae por debajo de un valor límite determinado, el convertidor indica un fallo.
En ciertas condiciones de funcionamiento, puede ocurrir que este mensaje de fallo deba ser suprimido. En este caso, se puede modificar la supervisión de entrada .
0 = Desactivado: sin supervisión de la tensión de alimentación.
1 = Sólo errores de fase: sólo los errores de fase provocan un mensaje de fallo.
2 = Sólo subtensión: sólo las subtensiones provocan un mensaje de fallo.
3 = Errores de fase y subtensión: las subtensiones y los errores de fase provocan un mensaje de fallo.
4 = Alimentación CC: en caso de alimentación directa con tensión continua, se considera la tensión de entrada como un valor fijo de 480 V. En este caso, la supervisión de errores de fase y de subtensión de red está desactivada.
Nota: ¡El funcionamiento con una tensión de red inapropiada puede destruir el CF!
P539 Supervisión de salida S P
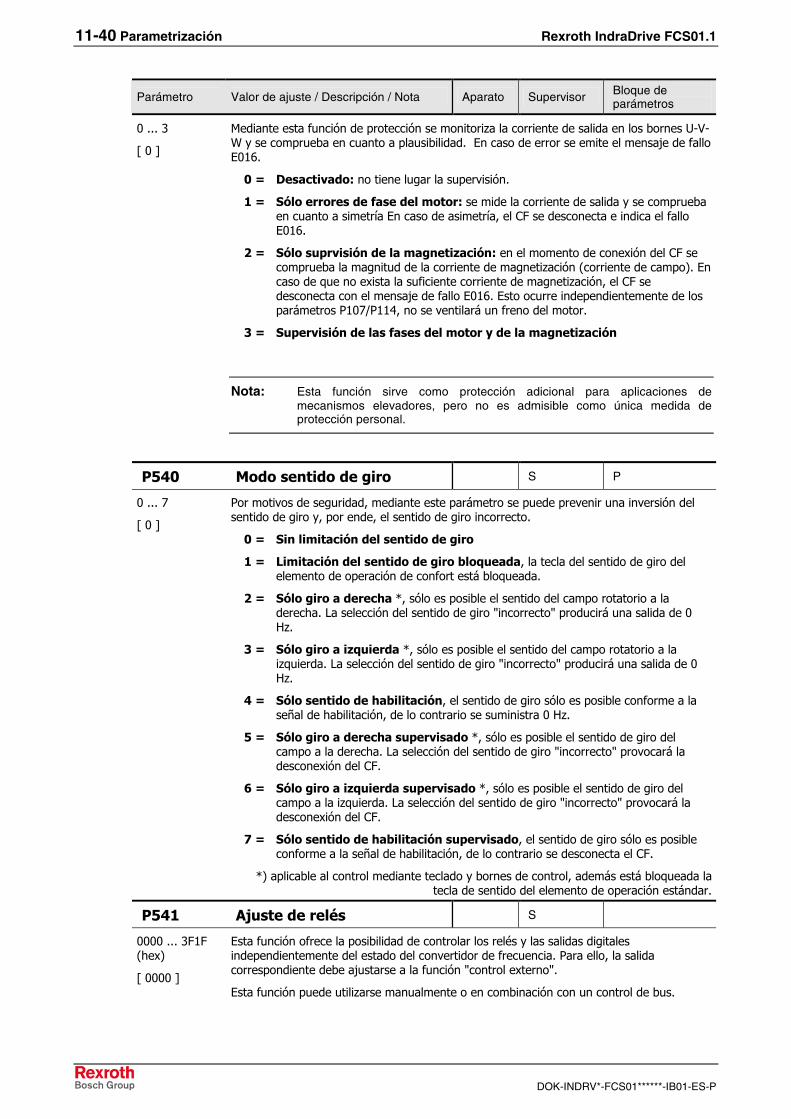
11-40 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de parámetros
0 ... 3
[ 0 ]
Mediante esta función de protección se monitoriza la corriente de salida en los bornes U-V-W y se comprueba en cuanto a plausibilidad. En caso de error se emite el mensaje de fallo E016.
0 = Desactivado: no tiene lugar la supervisión.
1 = Sólo errores de fase del motor: se mide la corriente de salida y se comprueba en cuanto a simetría En caso de asimetría, el CF se desconecta e indica el fallo E016.
2 = Sólo suprvisión de la magnetización: en el momento de conexión del CF se comprueba la magnitud de la corriente de magnetización (corriente de campo). En caso de que no exista la suficiente corriente de magnetización, el CF se desconecta con el mensaje de fallo E016. Esto ocurre independientemente de los parámetros P107/P114, no se ventilará un freno del motor.
3 = Supervisión de las fases del motor y de la magnetización
Nota: Esta función sirve como protección adicional para aplicaciones de mecanismos elevadores, pero no es admisible como única medida de protección personal.
P540 Modo sentido de giro S P
0 ... 7
[ 0 ]
Por motivos de seguridad, mediante este parámetro se puede prevenir una inversión del sentido de giro y, por ende, el sentido de giro incorrecto.
0 = Sin limitación del sentido de giro
1 = Limitación del sentido de giro bloqueada, la tecla del sentido de giro del elemento de operación de confort está bloqueada.
2 = Sólo giro a derecha *, sólo es posible el sentido del campo rotatorio a la derecha. La selección del sentido de giro "incorrecto" producirá una salida de 0 Hz.
3 = Sólo giro a izquierda *, sólo es posible el sentido del campo rotatorio a la izquierda. La selección del sentido de giro "incorrecto" producirá una salida de 0 Hz.
4 = Sólo sentido de habilitación, el sentido de giro sólo es posible conforme a la señal de habilitación, de lo contrario se suministra 0 Hz.
5 = Sólo giro a derecha supervisado *, sólo es posible el sentido de giro del campo a la derecha. La selección del sentido de giro "incorrecto" provocará la desconexión del CF.
6 = Sólo giro a izquierda supervisado *, sólo es posible el sentido de giro del campo a la izquierda. La selección del sentido de giro "incorrecto" provocará la desconexión del CF.
7 = Sólo sentido de habilitación supervisado, el sentido de giro sólo es posible conforme a la señal de habilitación, de lo contrario se desconecta el CF.
*) aplicable al control mediante teclado y bornes de control, además está bloqueada la tecla de sentido del elemento de operación estándar.
P541 Ajuste de relés S
0000 ... 3F1F (hex)
[ 0000 ]
Esta función ofrece la posibilidad de controlar los relés y las salidas digitales independientemente del estado del convertidor de frecuencia. Para ello, la salida correspondiente debe ajustarse a la función "control externo".
Esta función puede utilizarse manualmente o en combinación con un control de bus.
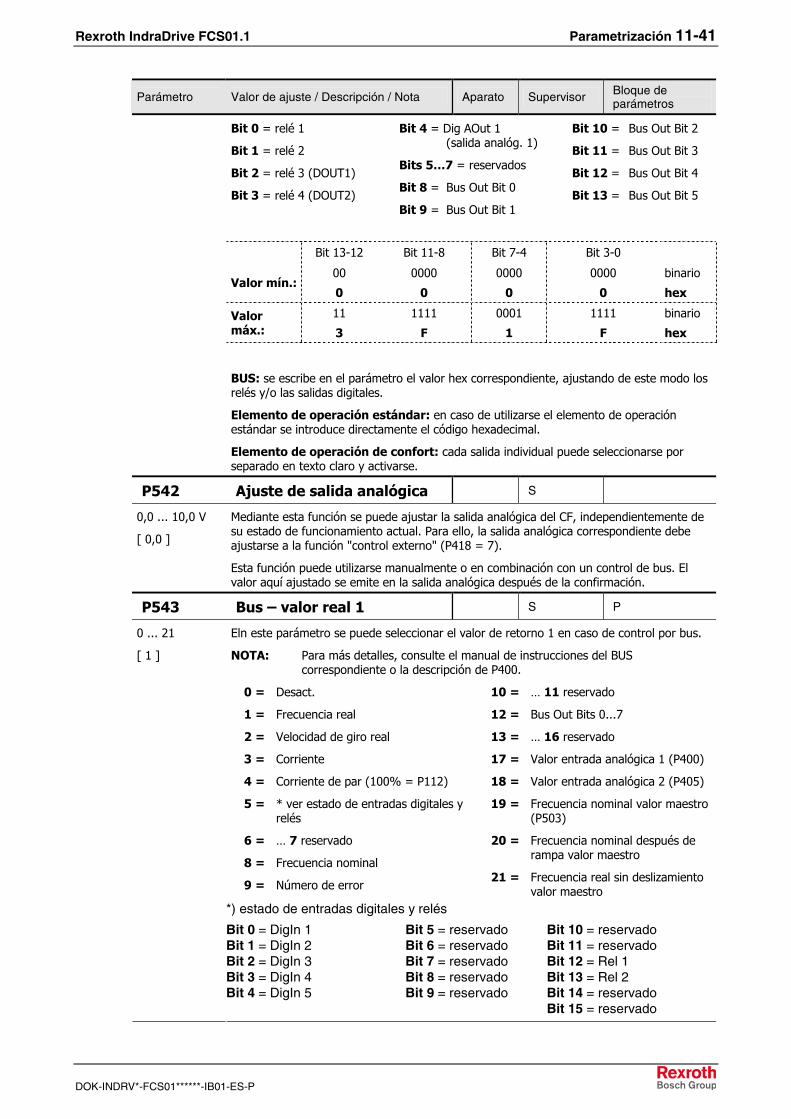
Rexroth IndraDrive FCS01.1 Parametrización 11-41
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de parámetros
Bit 0 = relé 1
Bit 1 = relé 2
Bit 2 = relé 3 (DOUT1)
Bit 3 = relé 4 (DOUT2)
Bit 4 = Dig AOut 1 (salida analóg. 1)
Bits 5…7 = reservados
Bit 8 = Bus Out Bit 0
Bit 9 = Bus Out Bit 1
Bit 10 = Bus Out Bit 2
Bit 11 = Bus Out Bit 3
Bit 12 = Bus Out Bit 4
Bit 13 = Bus Out Bit 5
Bit 13-12 Bit 11-8 Bit 7-4 Bit 3-0
Valor mín.: 00
0
0000
0
0000
0
0000
0
binario
hex
Valor máx.:
11
3
1111
F
0001
1
1111
F
binario
hex
BUS: se escribe en el parámetro el valor hex correspondiente, ajustando de este modo los relés y/o las salidas digitales.
Elemento de operación estándar: en caso de utilizarse el elemento de operación estándar se introduce directamente el código hexadecimal.
Elemento de operación de confort: cada salida individual puede seleccionarse por separado en texto claro y activarse.
P542 Ajuste de salida analógica S
0,0 ... 10,0 V
[ 0,0 ]
Mediante esta función se puede ajustar la salida analógica del CF, independientemente de su estado de funcionamiento actual. Para ello, la salida analógica correspondiente debe ajustarse a la función "control externo" (P418 = 7).
Esta función puede utilizarse manualmente o en combinación con un control de bus. El valor aquí ajustado se emite en la salida analógica después de la confirmación.
P543 Bus – valor real 1 S P
Eln este parámetro se puede seleccionar el valor de retorno 1 en caso de control por bus.
NOTA: Para más detalles, consulte el manual de instrucciones del BUS correspondiente o la descripción de P400.
0 = Desact.
1 = Frecuencia real
2 = Velocidad de giro real
3 = Corriente
4 = Corriente de par (100% = P112)
5 = * ver estado de entradas digitales y relés
6 = … 7 reservado
8 = Frecuencia nominal
9 = Número de error
10 = … 11 reservado
12 = Bus Out Bits 0...7
13 = … 16 reservado
17 = Valor entrada analógica 1 (P400)
18 = Valor entrada analógica 2 (P405)
19 = Frecuencia nominal valor maestro (P503)
20 = Frecuencia nominal después de rampa valor maestro
21 = Frecuencia real sin deslizamiento valor maestro
0 ... 21
[ 1 ]
*) estado de entradas digitales y relés
Bit 0 = DigIn 1 Bit 5 = reservado Bit 10 = reservado Bit 1 = DigIn 2 Bit 6 = reservado Bit 11 = reservado Bit 2 = DigIn 3 Bit 7 = reservado Bit 12 = Rel 1 Bit 3 = DigIn 4 Bit 8 = reservado Bit 13 = Rel 2 Bit 4 = DigIn 5 Bit 9 = reservado Bit 14 = reservado Bit 15 = reservado
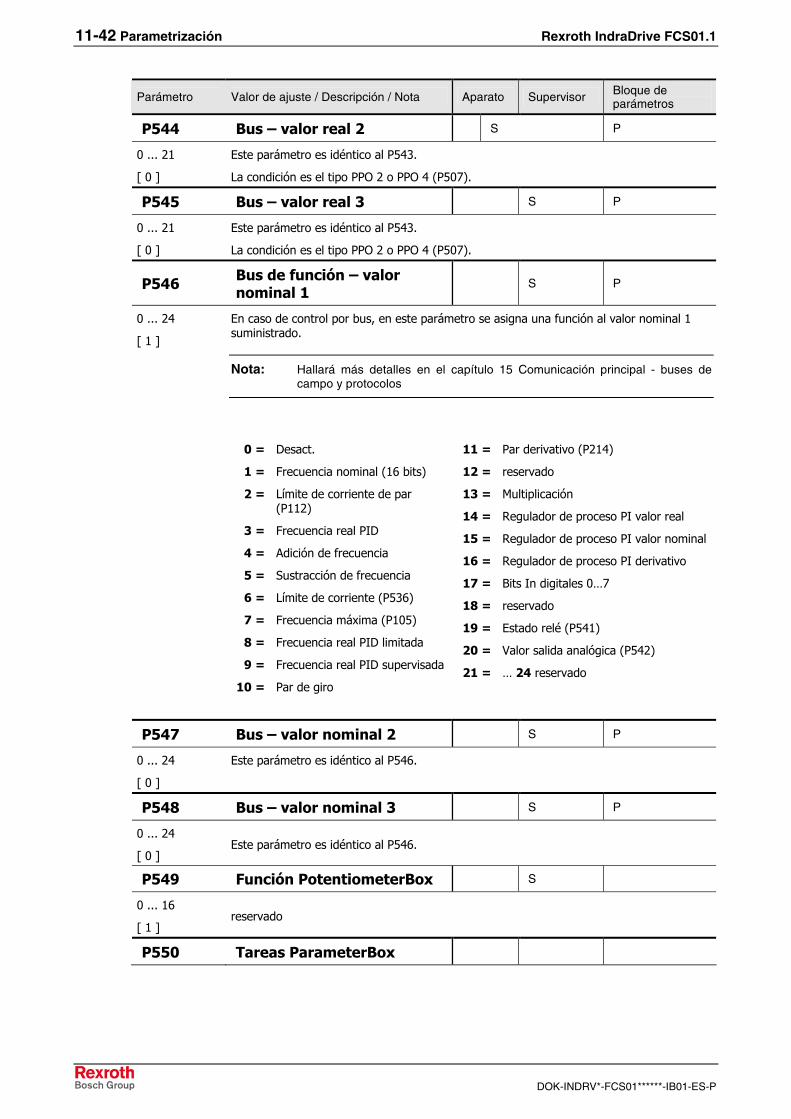
11-42 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de parámetros
P544 Bus – valor real 2 S P
0 ... 21
[ 0 ]
Este parámetro es idéntico al P543.
La condición es el tipo PPO 2 o PPO 4 (P507).
P545 Bus – valor real 3 S P
0 ... 21
[ 0 ]
Este parámetro es idéntico al P543.
La condición es el tipo PPO 2 o PPO 4 (P507).
P546 Bus de función – valor nominal 1
S P
En caso de control por bus, en este parámetro se asigna una función al valor nominal 1 suministrado.
Nota: Hallará más detalles en el capítulo 15 Comunicación principal - buses de campo y protocolos
0 ... 24
[ 1 ]
0 = Desact.
1 = Frecuencia nominal (16 bits)
2 = Límite de corriente de par (P112)
3 = Frecuencia real PID
4 = Adición de frecuencia
5 = Sustracción de frecuencia
6 = Límite de corriente (P536)
7 = Frecuencia máxima (P105)
8 = Frecuencia real PID limitada
9 = Frecuencia real PID supervisada
10 = Par de giro
11 = Par derivativo (P214)
12 = reservado
13 = Multiplicación
14 = Regulador de proceso PI valor real
15 = Regulador de proceso PI valor nominal
16 = Regulador de proceso PI derivativo
17 = Bits In digitales 0…7
18 = reservado
19 = Estado relé (P541)
20 = Valor salida analógica (P542)
21 = … 24 reservado
P547 Bus – valor nominal 2 S P
0 ... 24
[ 0 ]
Este parámetro es idéntico al P546.
P548 Bus – valor nominal 3 S P
0 ... 24
[ 0 ] Este parámetro es idéntico al P546.
P549 Función PotentiometerBox S
0 ... 16
[ 1 ] reservado
P550 Tareas ParameterBox
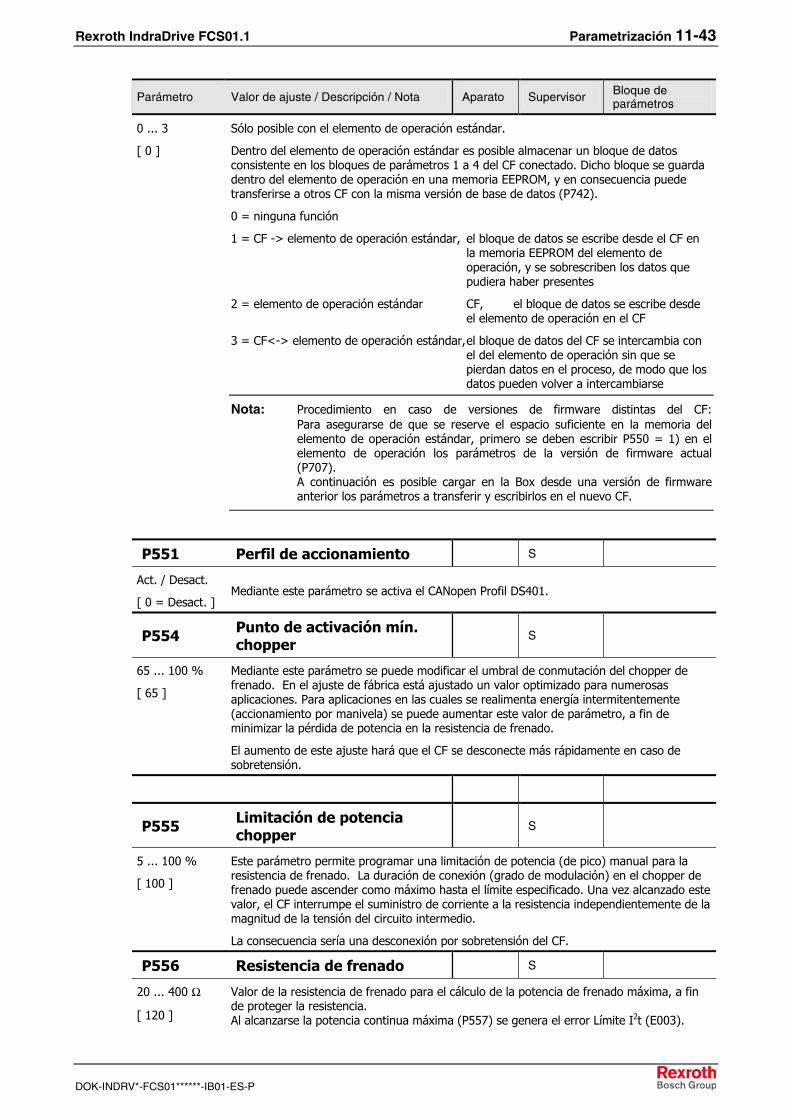
Rexroth IndraDrive FCS01.1 Parametrización 11-43
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de parámetros
0 ... 3
[ 0 ]
Sólo posible con el elemento de operación estándar.
Dentro del elemento de operación estándar es posible almacenar un bloque de datos consistente en los bloques de parámetros 1 a 4 del CF conectado. Dicho bloque se guarda dentro del elemento de operación en una memoria EEPROM, y en consecuencia puede transferirse a otros CF con la misma versión de base de datos (P742).
0 = ninguna función
1 = CF -> elemento de operación estándar, el bloque de datos se escribe desde el CF en la memoria EEPROM del elemento de operación, y se sobrescriben los datos que pudiera haber presentes
2 = elemento de operación estándar CF, el bloque de datos se escribe desde el elemento de operación en el CF
3 = CF<-> elemento de operación estándar, el bloque de datos del CF se intercambia con el del elemento de operación sin que se pierdan datos en el proceso, de modo que los datos pueden volver a intercambiarse
Nota: Procedimiento en caso de versiones de firmware distintas del CF:Para asegurarse de que se reserve el espacio suficiente en la memoria del elemento de operación estándar, primero se deben escribir P550 = 1) en el elemento de operación los parámetros de la versión de firmware actual (P707). A continuación es posible cargar en la Box desde una versión de firmware anterior los parámetros a transferir y escribirlos en el nuevo CF.
P551 Perfil de accionamiento S
Act. / Desact.
[ 0 = Desact. ] Mediante este parámetro se activa el CANopen Profil DS401.
P554 Punto de activación mín. chopper
S
65 ... 100 %
[ 65 ]
Mediante este parámetro se puede modificar el umbral de conmutación del chopper de frenado. En el ajuste de fábrica está ajustado un valor optimizado para numerosas aplicaciones. Para aplicaciones en las cuales se realimenta energía intermitentemente (accionamiento por manivela) se puede aumentar este valor de parámetro, a fin de minimizar la pérdida de potencia en la resistencia de frenado.
El aumento de este ajuste hará que el CF se desconecte más rápidamente en caso de sobretensión.
P555 Limitación de potencia chopper
S
5 ... 100 %
[ 100 ]
Este parámetro permite programar una limitación de potencia (de pico) manual para la resistencia de frenado. La duración de conexión (grado de modulación) en el chopper de frenado puede ascender como máximo hasta el límite especificado. Una vez alcanzado este valor, el CF interrumpe el suministro de corriente a la resistencia independientemente de la magnitud de la tensión del circuito intermedio.
La consecuencia sería una desconexión por sobretensión del CF.
P556 Resistencia de frenado S
20 ... 400 Ω
[ 120 ]
Valor de la resistencia de frenado para el cálculo de la potencia de frenado máxima, a fin de proteger la resistencia. Al alcanzarse la potencia continua máxima (P557) se genera el error Límite I2t (E003).
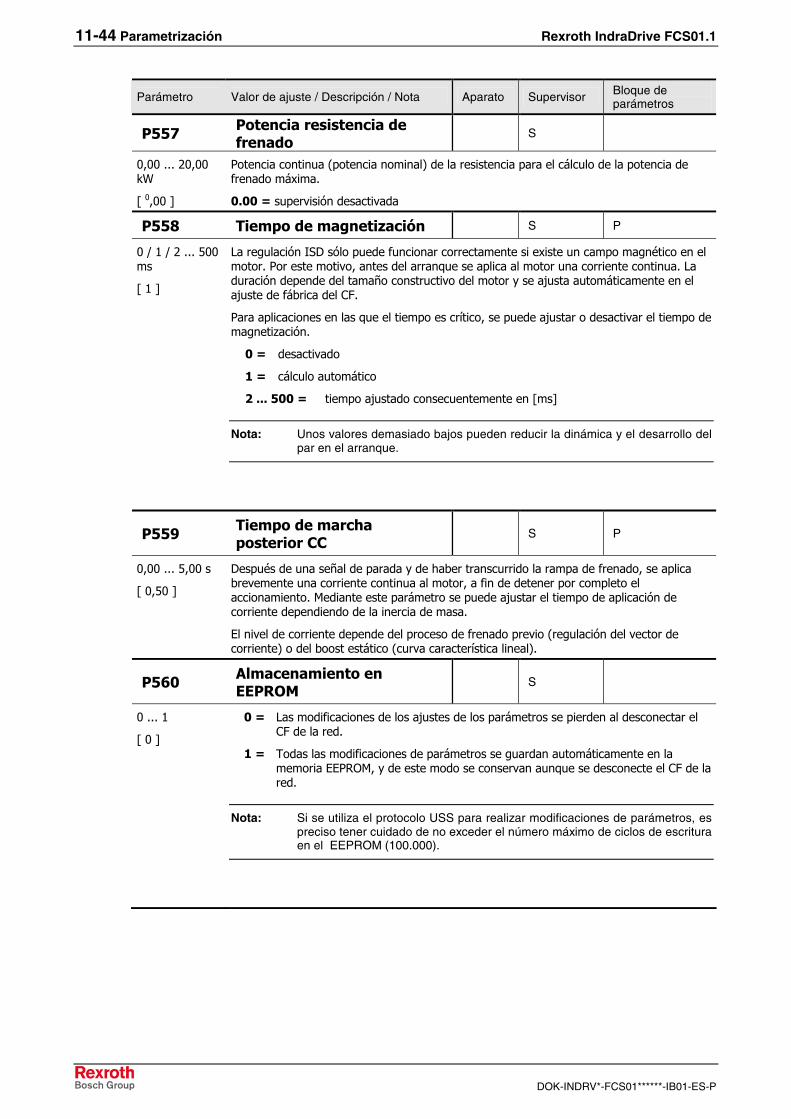
11-44 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de parámetros
P557 Potencia resistencia de frenado
S
0,00 ... 20,00 kW
[ 0,00 ]
Potencia continua (potencia nominal) de la resistencia para el cálculo de la potencia de frenado máxima.
0.00 = supervisión desactivada
P558 Tiempo de magnetización S P
0 / 1 / 2 ... 500 ms
[ 1 ]
La regulación ISD sólo puede funcionar correctamente si existe un campo magnético en el motor. Por este motivo, antes del arranque se aplica al motor una corriente continua. La duración depende del tamaño constructivo del motor y se ajusta automáticamente en el ajuste de fábrica del CF.
Para aplicaciones en las que el tiempo es crítico, se puede ajustar o desactivar el tiempo de magnetización.
0 = desactivado
1 = cálculo automático
2 ... 500 = tiempo ajustado consecuentemente en [ms]
Nota: Unos valores demasiado bajos pueden reducir la dinámica y el desarrollo del par en el arranque.
P559 Tiempo de marcha posterior CC
S P
0,00 ... 5,00 s
[ 0,50 ]
Después de una señal de parada y de haber transcurrido la rampa de frenado, se aplica brevemente una corriente continua al motor, a fin de detener por completo el accionamiento. Mediante este parámetro se puede ajustar el tiempo de aplicación de corriente dependiendo de la inercia de masa.
El nivel de corriente depende del proceso de frenado previo (regulación del vector de corriente) o del boost estático (curva característica lineal).
P560 Almacenamiento en EEPROM
S
0 ... 1
[ 0 ]
0 = Las modificaciones de los ajustes de los parámetros se pierden al desconectar el CF de la red.
1 = Todas las modificaciones de parámetros se guardan automáticamente en la memoria EEPROM, y de este modo se conservan aunque se desconecte el CF de la red.
Nota: Si se utiliza el protocolo USS para realizar modificaciones de parámetros, es preciso tener cuidado de no exceder el número máximo de ciclos de escritura en el EEPROM (100.000).
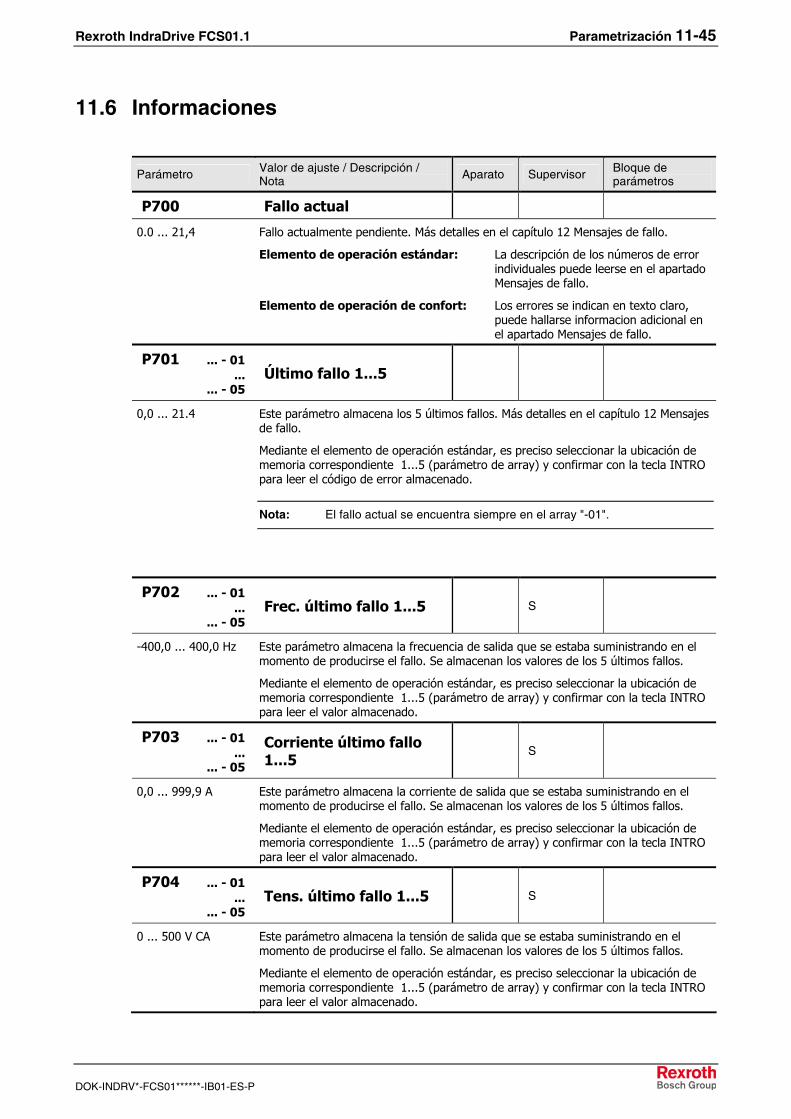
Rexroth IndraDrive FCS01.1 Parametrización 11-45
DOK-INDRV*-FCS01******-IB01-ES-P
11.6 Informaciones
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de
parámetros
P700 Fallo actual
0.0 ... 21,4 Fallo actualmente pendiente. Más detalles en el capítulo 12 Mensajes de fallo.
Elemento de operación estándar: La descripción de los números de error individuales puede leerse en el apartado Mensajes de fallo.
Elemento de operación de confort: Los errores se indican en texto claro, puede hallarse informacion adicional en el apartado Mensajes de fallo.
P701 ... - 01 ... ... - 05
Último fallo 1...5
0,0 ... 21.4 Este parámetro almacena los 5 últimos fallos. Más detalles en el capítulo 12 Mensajes de fallo.
Mediante el elemento de operación estándar, es preciso seleccionar la ubicación de memoria correspondiente 1...5 (parámetro de array) y confirmar con la tecla INTRO para leer el código de error almacenado.
Nota: El fallo actual se encuentra siempre en el array "-01".
P702 ... - 01 ... ... - 05
Frec. último fallo 1...5 S
-400,0 ... 400,0 Hz Este parámetro almacena la frecuencia de salida que se estaba suministrando en el momento de producirse el fallo. Se almacenan los valores de los 5 últimos fallos.
Mediante el elemento de operación estándar, es preciso seleccionar la ubicación de memoria correspondiente 1...5 (parámetro de array) y confirmar con la tecla INTRO para leer el valor almacenado.
P703 ... - 01 ... ... - 05
Corriente último fallo 1...5
S
0,0 ... 999,9 A Este parámetro almacena la corriente de salida que se estaba suministrando en el momento de producirse el fallo. Se almacenan los valores de los 5 últimos fallos.
Mediante el elemento de operación estándar, es preciso seleccionar la ubicación de memoria correspondiente 1...5 (parámetro de array) y confirmar con la tecla INTRO para leer el valor almacenado.
P704 ... - 01 ... ... - 05
Tens. último fallo 1...5 S
0 ... 500 V CA Este parámetro almacena la tensión de salida que se estaba suministrando en el momento de producirse el fallo. Se almacenan los valores de los 5 últimos fallos.
Mediante el elemento de operación estándar, es preciso seleccionar la ubicación de memoria correspondiente 1...5 (parámetro de array) y confirmar con la tecla INTRO para leer el valor almacenado.
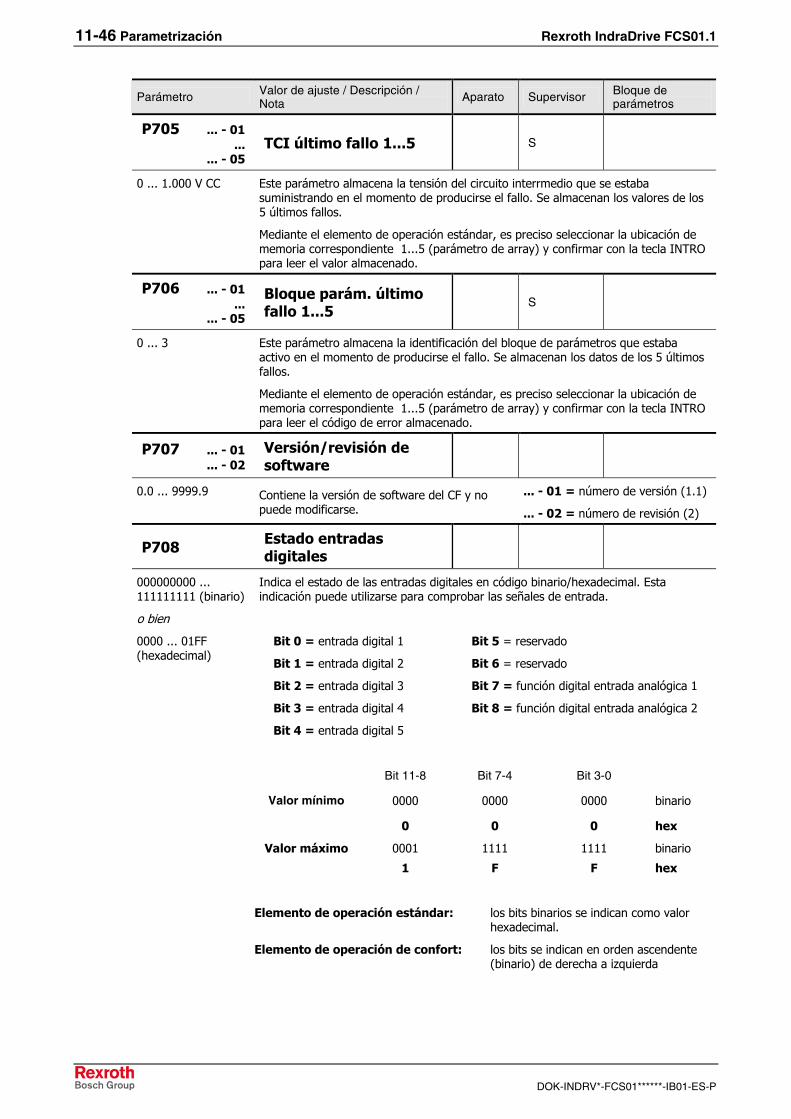
11-46 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de
parámetros
P705 ... - 01 ... ... - 05
TCI último fallo 1...5 S
0 ... 1.000 V CC Este parámetro almacena la tensión del circuito interrmedio que se estaba suministrando en el momento de producirse el fallo. Se almacenan los valores de los 5 últimos fallos.
Mediante el elemento de operación estándar, es preciso seleccionar la ubicación de memoria correspondiente 1...5 (parámetro de array) y confirmar con la tecla INTRO para leer el valor almacenado.
P706 ... - 01 ... ... - 05
Bloque parám. último fallo 1...5
S
0 ... 3 Este parámetro almacena la identificación del bloque de parámetros que estaba activo en el momento de producirse el fallo. Se almacenan los datos de los 5 últimos fallos.
Mediante el elemento de operación estándar, es preciso seleccionar la ubicación de memoria correspondiente 1...5 (parámetro de array) y confirmar con la tecla INTRO para leer el código de error almacenado.
P707 ... - 01 ... - 02
Versión/revisión de software
0.0 ... 9999.9 Contiene la versión de software del CF y no puede modificarse.
... - 01 = número de versión (1.1)
... - 02 = número de revisión (2)
P708 Estado entradas digitales
Indica el estado de las entradas digitales en código binario/hexadecimal. Esta indicación puede utilizarse para comprobar las señales de entrada.
Bit 0 = entrada digital 1
Bit 1 = entrada digital 2
Bit 2 = entrada digital 3
Bit 3 = entrada digital 4
Bit 4 = entrada digital 5
Bit 5 = reservado
Bit 6 = reservado
Bit 7 = función digital entrada analógica 1
Bit 8 = función digital entrada analógica 2
Bit 11-8 Bit 7-4 Bit 3-0
Valor mínimo 0000
0
0000
0
0000
0
binario
hex
Valor máximo 0001
1
1111
F
1111
F
binario
hex
000000000 ... 111111111 (binario)
o bien
0000 ... 01FF (hexadecimal)
Elemento de operación estándar: los bits binarios se indican como valor hexadecimal.
Elemento de operación de confort: los bits se indican en orden ascendente (binario) de derecha a izquierda
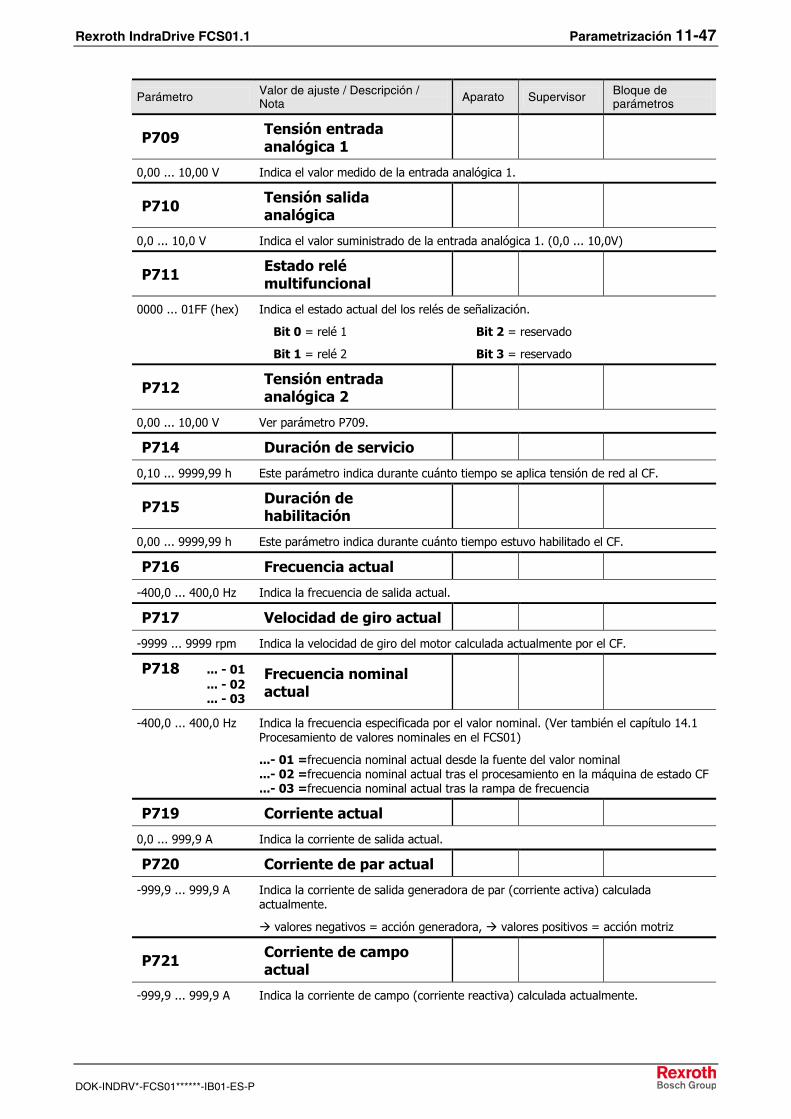
Rexroth IndraDrive FCS01.1 Parametrización 11-47
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de
parámetros
P709 Tensión entrada analógica 1
0,00 ... 10,00 V Indica el valor medido de la entrada analógica 1.
P710 Tensión salida analógica
0,0 ... 10,0 V Indica el valor suministrado de la entrada analógica 1. (0,0 ... 10,0V)
P711 Estado relé multifuncional
Indica el estado actual del los relés de señalización. 0000 ... 01FF (hex)
Bit 0 = relé 1
Bit 1 = relé 2
Bit 2 = reservado
Bit 3 = reservado
P712 Tensión entrada analógica 2
0,00 ... 10,00 V Ver parámetro P709.
P714 Duración de servicio
0,10 ... 9999,99 h Este parámetro indica durante cuánto tiempo se aplica tensión de red al CF.
P715 Duración de habilitación
0,00 ... 9999,99 h Este parámetro indica durante cuánto tiempo estuvo habilitado el CF.
P716 Frecuencia actual
-400,0 ... 400,0 Hz Indica la frecuencia de salida actual.
P717 Velocidad de giro actual
-9999 ... 9999 rpm Indica la velocidad de giro del motor calculada actualmente por el CF.
P718 ... - 01 ... - 02 ... - 03
Frecuencia nominal actual
-400,0 ... 400,0 Hz
Indica la frecuencia especificada por el valor nominal. (Ver también el capítulo 14.1 Procesamiento de valores nominales en el FCS01)
...- 01 =frecuencia nominal actual desde la fuente del valor nominal
...- 02 =frecuencia nominal actual tras el procesamiento en la máquina de estado CF
...- 03 =frecuencia nominal actual tras la rampa de frecuencia
P719 Corriente actual
0,0 ... 999,9 A Indica la corriente de salida actual.
P720 Corriente de par actual
-999,9 ... 999,9 A Indica la corriente de salida generadora de par (corriente activa) calculada actualmente.
valores negativos = acción generadora, valores positivos = acción motriz
P721 Corriente de campo actual
-999,9 ... 999,9 A Indica la corriente de campo (corriente reactiva) calculada actualmente.
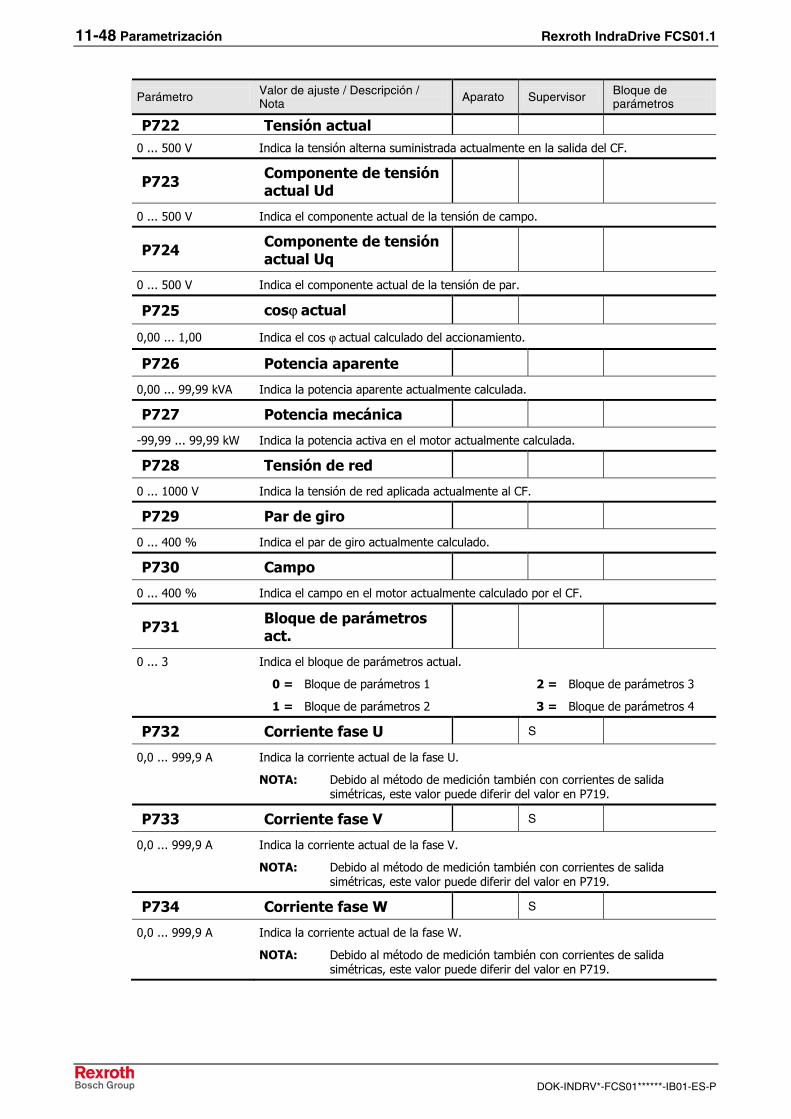
11-48 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de
parámetros
P722 Tensión actual
0 ... 500 V Indica la tensión alterna suministrada actualmente en la salida del CF.
P723 Componente de tensión actual Ud
0 ... 500 V Indica el componente actual de la tensión de campo.
P724 Componente de tensión actual Uq
0 ... 500 V Indica el componente actual de la tensión de par.
P725 cosϕ actual
0,00 ... 1,00 Indica el cos ϕ actual calculado del accionamiento.
P726 Potencia aparente
0,00 ... 99,99 kVA Indica la potencia aparente actualmente calculada.
P727 Potencia mecánica
-99,99 ... 99,99 kW Indica la potencia activa en el motor actualmente calculada.
P728 Tensión de red
0 ... 1000 V Indica la tensión de red aplicada actualmente al CF.
P729 Par de giro
0 ... 400 % Indica el par de giro actualmente calculado.
P730 Campo
0 ... 400 % Indica el campo en el motor actualmente calculado por el CF.
P731 Bloque de parámetros act.
Indica el bloque de parámetros actual. 0 ... 3
0 = Bloque de parámetros 1
1 = Bloque de parámetros 2
2 = Bloque de parámetros 3
3 = Bloque de parámetros 4
P732 Corriente fase U S
0,0 ... 999,9 A Indica la corriente actual de la fase U.
NOTA: Debido al método de medición también con corrientes de salida simétricas, este valor puede diferir del valor en P719.
P733 Corriente fase V S
0,0 ... 999,9 A Indica la corriente actual de la fase V.
NOTA: Debido al método de medición también con corrientes de salida simétricas, este valor puede diferir del valor en P719.
P734 Corriente fase W S
0,0 ... 999,9 A Indica la corriente actual de la fase W.
NOTA: Debido al método de medición también con corrientes de salida simétricas, este valor puede diferir del valor en P719.
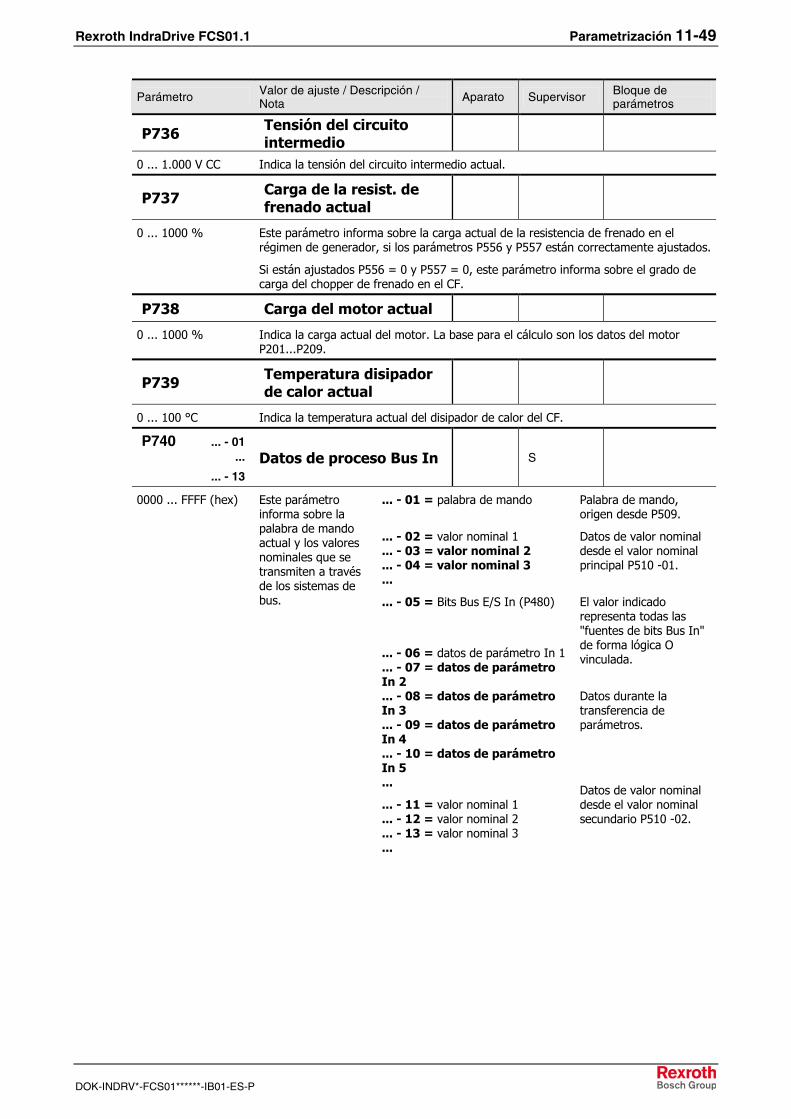
Rexroth IndraDrive FCS01.1 Parametrización 11-49
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de
parámetros
P736 Tensión del circuito intermedio
0 ... 1.000 V CC Indica la tensión del circuito intermedio actual.
P737 Carga de la resist. de frenado actual
0 ... 1000 % Este parámetro informa sobre la carga actual de la resistencia de frenado en el régimen de generador, si los parámetros P556 y P557 están correctamente ajustados.
Si están ajustados P556 = 0 y P557 = 0, este parámetro informa sobre el grado de carga del chopper de frenado en el CF.
P738 Carga del motor actual
0 ... 1000 % Indica la carga actual del motor. La base para el cálculo son los datos del motor P201...P209.
P739 Temperatura disipador de calor actual
0 ... 100 °C Indica la temperatura actual del disipador de calor del CF.
P740 ... - 01 ...
... - 13 Datos de proceso Bus In S
0000 ... FFFF (hex) Este parámetro informa sobre la palabra de mando actual y los valores nominales que se transmiten a través de los sistemas de bus.
... - 01 = palabra de mando
... - 02 = valor nominal 1
... - 03 = valor nominal 2
... - 04 = valor nominal 3
...
... - 05 = Bits Bus E/S In (P480)
... - 06 = datos de parámetro In 1
... - 07 = datos de parámetro In 2 ... - 08 = datos de parámetro In 3 ... - 09 = datos de parámetro In 4 ... - 10 = datos de parámetro In 5 ...
... - 11 = valor nominal 1
... - 12 = valor nominal 2
... - 13 = valor nominal 3
...
Palabra de mando, origen desde P509.
Datos de valor nominal desde el valor nominal principal P510 -01.
El valor indicado representa todas las "fuentes de bits Bus In" de forma lógica O vinculada.
Datos durante la transferencia de parámetros.
Datos de valor nominal desde el valor nominal secundario P510 -02.
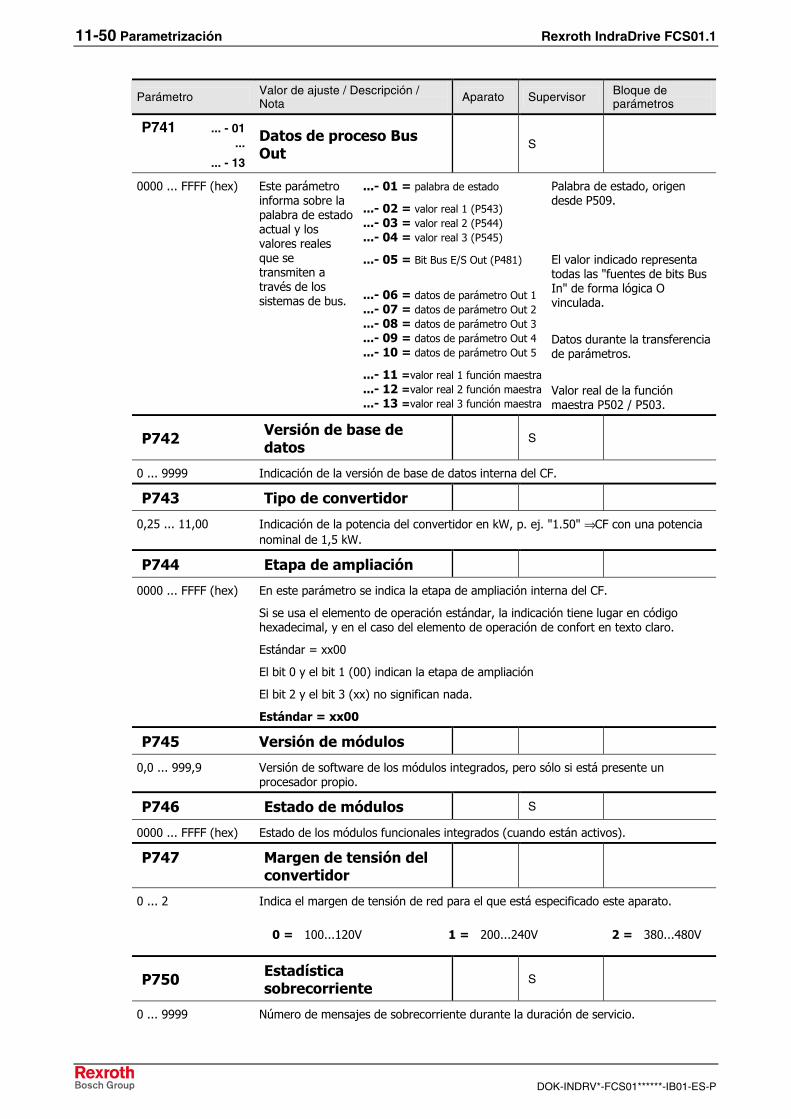
11-50 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de
parámetros
P741 ... - 01 ...
... - 13
Datos de proceso Bus Out
S
0000 ... FFFF (hex) Este parámetro informa sobre la palabra de estado actual y los valores reales que se transmiten a través de los sistemas de bus.
...- 01 = palabra de estado
...- 02 = valor real 1 (P543)
...- 03 = valor real 2 (P544)
...- 04 = valor real 3 (P545)
...- 05 = Bit Bus E/S Out (P481)
...- 06 = datos de parámetro Out 1
...- 07 = datos de parámetro Out 2
...- 08 = datos de parámetro Out 3
...- 09 = datos de parámetro Out 4
...- 10 = datos de parámetro Out 5
...- 11 =valor real 1 función maestra
...- 12 =valor real 2 función maestra
...- 13 =valor real 3 función maestra
Palabra de estado, origen desde P509.
El valor indicado representa todas las "fuentes de bits Bus In" de forma lógica O vinculada.
Datos durante la transferencia de parámetros.
Valor real de la función maestra P502 / P503.
P742 Versión de base de datos
S
0 ... 9999 Indicación de la versión de base de datos interna del CF.
P743 Tipo de convertidor
0,25 ... 11,00 Indicación de la potencia del convertidor en kW, p. ej. "1.50" ⇒ CF con una potencia nominal de 1,5 kW.
P744 Etapa de ampliación
En este parámetro se indica la etapa de ampliación interna del CF.
Si se usa el elemento de operación estándar, la indicación tiene lugar en código hexadecimal, y en el caso del elemento de operación de confort en texto claro.
Estándar = xx00
El bit 0 y el bit 1 (00) indican la etapa de ampliación
El bit 2 y el bit 3 (xx) no significan nada.
0000 ... FFFF (hex)
Estándar = xx00
P745 Versión de módulos
0,0 ... 999,9 Versión de software de los módulos integrados, pero sólo si está presente un procesador propio.
P746 Estado de módulos S
0000 ... FFFF (hex) Estado de los módulos funcionales integrados (cuando están activos).
P747 Margen de tensión del convertidor
Indica el margen de tensión de red para el que está especificado este aparato. 0 ... 2
0 = 100...120V 1 = 200...240V 2 = 380...480V
P750 Estadística sobrecorriente
S
0 ... 9999 Número de mensajes de sobrecorriente durante la duración de servicio.
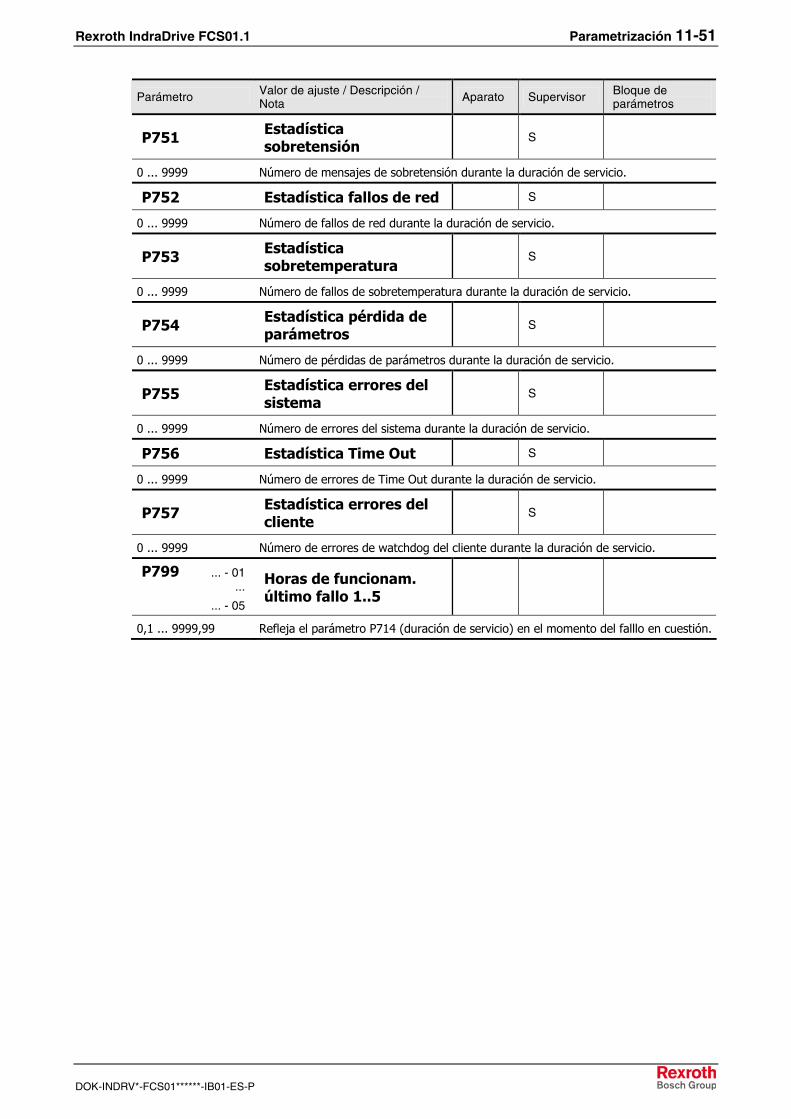
Rexroth IndraDrive FCS01.1 Parametrización 11-51
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetro Valor de ajuste / Descripción / Nota Aparato Supervisor Bloque de
parámetros
P751 Estadística sobretensión
S
0 ... 9999 Número de mensajes de sobretensión durante la duración de servicio.
P752 Estadística fallos de red S
0 ... 9999 Número de fallos de red durante la duración de servicio.
P753 Estadística sobretemperatura
S
0 ... 9999 Número de fallos de sobretemperatura durante la duración de servicio.
P754 Estadística pérdida de parámetros
S
0 ... 9999 Número de pérdidas de parámetros durante la duración de servicio.
P755 Estadística errores del sistema
S
0 ... 9999 Número de errores del sistema durante la duración de servicio.
P756 Estadística Time Out S
0 ... 9999 Número de errores de Time Out durante la duración de servicio.
P757 Estadística errores del cliente
S
0 ... 9999 Número de errores de watchdog del cliente durante la duración de servicio.
P799 ... - 01 ...
... - 05
Horas de funcionam. último fallo 1..5
0,1 ... 9999,99 Refleja el parámetro P714 (duración de servicio) en el momento del falllo en cuestión.
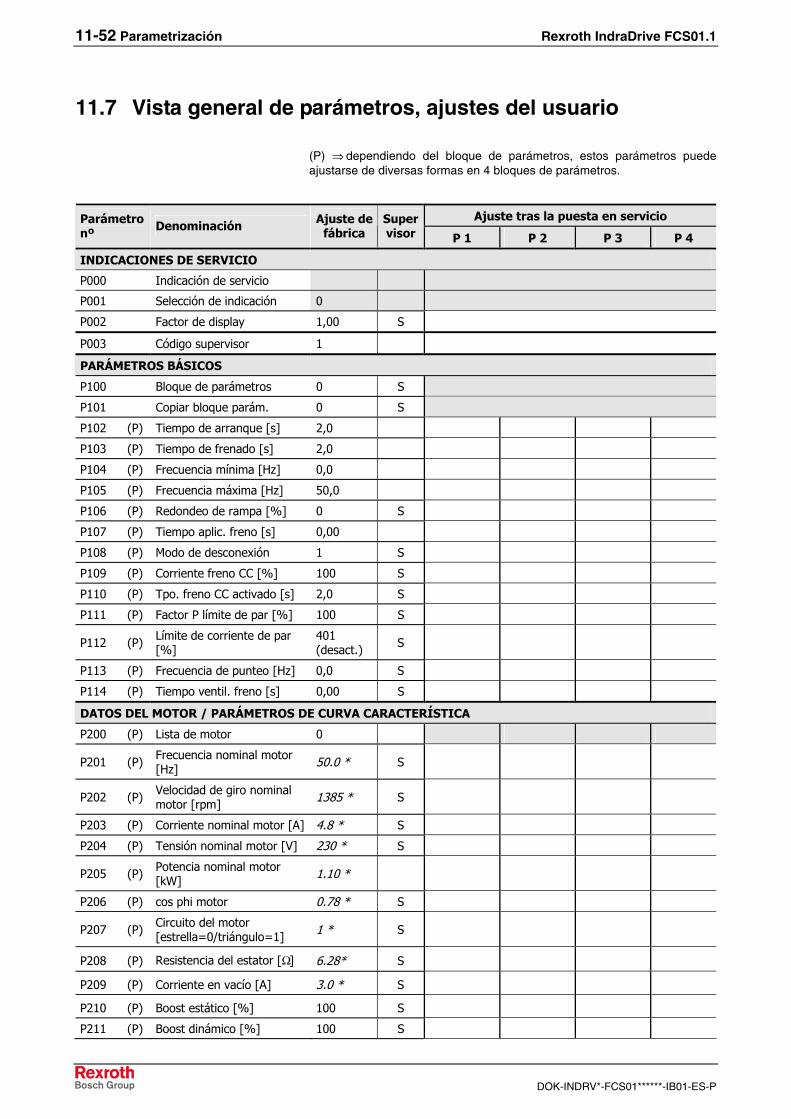
11-52 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
11.7 Vista general de parámetros, ajustes del usuario (P) ⇒ dependiendo del bloque de parámetros, estos parámetros puede ajustarse de diversas formas en 4 bloques de parámetros.
Ajuste tras la puesta en servicio Parámetronº Denominación Ajuste de
fábrica Supervisor P 1 P 2 P 3 P 4
INDICACIONES DE SERVICIO
P000 Indicación de servicio
P001 Selección de indicación 0
P002 Factor de display 1,00 S
P003 Código supervisor 1
PARÁMETROS BÁSICOS
P100 Bloque de parámetros 0 S
P101 Copiar bloque parám. 0 S
P102 (P) Tiempo de arranque [s] 2,0
P103 (P) Tiempo de frenado [s] 2,0
P104 (P) Frecuencia mínima [Hz] 0,0
P105 (P) Frecuencia máxima [Hz] 50,0
P106 (P) Redondeo de rampa [%] 0 S
P107 (P) Tiempo aplic. freno [s] 0,00
P108 (P) Modo de desconexión 1 S
P109 (P) Corriente freno CC [%] 100 S
P110 (P) Tpo. freno CC activado [s] 2,0 S
P111 (P) Factor P límite de par [%] 100 S
P112 (P) Límite de corriente de par [%]
401 (desact.) S
P113 (P) Frecuencia de punteo [Hz] 0,0 S
P114 (P) Tiempo ventil. freno [s] 0,00 S
DATOS DEL MOTOR / PARÁMETROS DE CURVA CARACTERÍSTICA
P200 (P) Lista de motor 0
P201 (P) Frecuencia nominal motor [Hz] 50.0 * S
P202 (P) Velocidad de giro nominal motor [rpm] 1385 * S
P203 (P) Corriente nominal motor [A] 4.8 * S
P204 (P) Tensión nominal motor [V] 230 * S
P205 (P) Potencia nominal motor [kW] 1.10 *
P206 (P) cos phi motor 0.78 * S
P207 (P) Circuito del motor [estrella=0/triángulo=1] 1 * S
P208 (P) Resistencia del estator [Ω] 6.28* S
P209 (P) Corriente en vacío [A] 3.0 * S
P210 (P) Boost estático [%] 100 S
P211 (P) Boost dinámico [%] 100 S
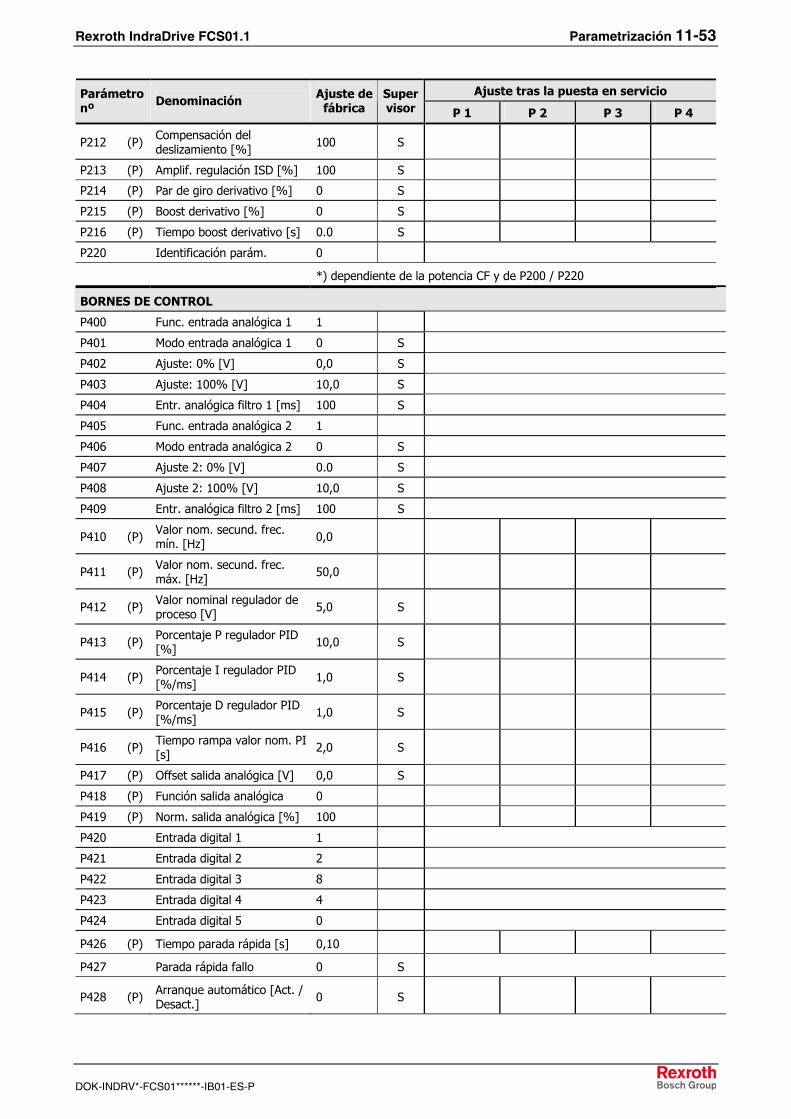
Rexroth IndraDrive FCS01.1 Parametrización 11-53
DOK-INDRV*-FCS01******-IB01-ES-P
Ajuste tras la puesta en servicio Parámetronº Denominación Ajuste de
fábrica Supervisor P 1 P 2 P 3 P 4
P212 (P) Compensación del deslizamiento [%] 100 S
P213 (P) Amplif. regulación ISD [%] 100 S
P214 (P) Par de giro derivativo [%] 0 S
P215 (P) Boost derivativo [%] 0 S
P216 (P) Tiempo boost derivativo [s] 0.0 S
P220 Identificación parám. 0
*) dependiente de la potencia CF y de P200 / P220
BORNES DE CONTROL
P400 Func. entrada analógica 1 1
P401 Modo entrada analógica 1 0 S
P402 Ajuste: 0% [V] 0,0 S
P403 Ajuste: 100% [V] 10,0 S
P404 Entr. analógica filtro 1 [ms] 100 S
P405 Func. entrada analógica 2 1
P406 Modo entrada analógica 2 0 S
P407 Ajuste 2: 0% [V] 0.0 S
P408 Ajuste 2: 100% [V] 10,0 S
P409 Entr. analógica filtro 2 [ms] 100 S
P410 (P) Valor nom. secund. frec. mín. [Hz] 0,0
P411 (P) Valor nom. secund. frec. máx. [Hz] 50,0
P412 (P) Valor nominal regulador de proceso [V] 5,0 S
P413 (P) Porcentaje P regulador PID [%] 10,0 S
P414 (P) Porcentaje I regulador PID [%/ms] 1,0 S
P415 (P) Porcentaje D regulador PID [%/ms] 1,0 S
P416 (P) Tiempo rampa valor nom. PI [s] 2,0 S
P417 (P) Offset salida analógica [V] 0,0 S
P418 (P) Función salida analógica 0
P419 (P) Norm. salida analógica [%] 100
P420 Entrada digital 1 1
P421 Entrada digital 2 2
P422 Entrada digital 3 8
P423 Entrada digital 4 4
P424 Entrada digital 5 0
P426 (P) Tiempo parada rápida [s] 0,10
P427 Parada rápida fallo 0 S
P428 (P) Arranque automático [Act. / Desact.] 0 S
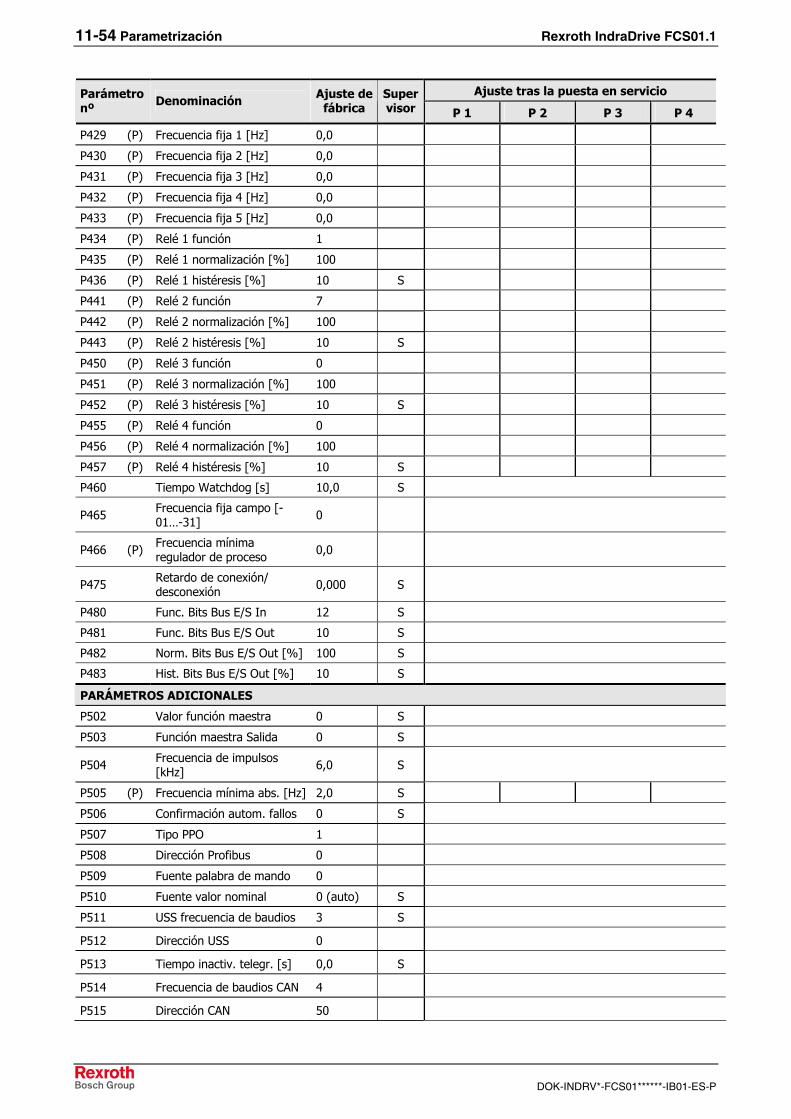
11-54 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Ajuste tras la puesta en servicio Parámetronº Denominación Ajuste de
fábrica Supervisor P 1 P 2 P 3 P 4
P429 (P) Frecuencia fija 1 [Hz] 0,0
P430 (P) Frecuencia fija 2 [Hz] 0,0
P431 (P) Frecuencia fija 3 [Hz] 0,0
P432 (P) Frecuencia fija 4 [Hz] 0,0
P433 (P) Frecuencia fija 5 [Hz] 0,0
P434 (P) Relé 1 función 1
P435 (P) Relé 1 normalización [%] 100
P436 (P) Relé 1 histéresis [%] 10 S
P441 (P) Relé 2 función 7
P442 (P) Relé 2 normalización [%] 100
P443 (P) Relé 2 histéresis [%] 10 S
P450 (P) Relé 3 función 0
P451 (P) Relé 3 normalización [%] 100
P452 (P) Relé 3 histéresis [%] 10 S
P455 (P) Relé 4 función 0
P456 (P) Relé 4 normalización [%] 100
P457 (P) Relé 4 histéresis [%] 10 S
P460 Tiempo Watchdog [s] 10,0 S
P465 Frecuencia fija campo [-01…-31] 0
P466 (P) Frecuencia mínima regulador de proceso 0,0
P475 Retardo de conexión/ desconexión 0,000 S
P480 Func. Bits Bus E/S In 12 S
P481 Func. Bits Bus E/S Out 10 S
P482 Norm. Bits Bus E/S Out [%] 100 S
P483 Hist. Bits Bus E/S Out [%] 10 S
PARÁMETROS ADICIONALES
P502 Valor función maestra 0 S
P503 Función maestra Salida 0 S
P504 Frecuencia de impulsos [kHz] 6,0 S
P505 (P) Frecuencia mínima abs. [Hz] 2,0 S
P506 Confirmación autom. fallos 0 S
P507 Tipo PPO 1
P508 Dirección Profibus 0
P509 Fuente palabra de mando 0
P510 Fuente valor nominal 0 (auto) S
P511 USS frecuencia de baudios 3 S
P512 Dirección USS 0
P513 Tiempo inactiv. telegr. [s] 0,0 S
P514 Frecuencia de baudios CAN 4
P515 Dirección CAN 50
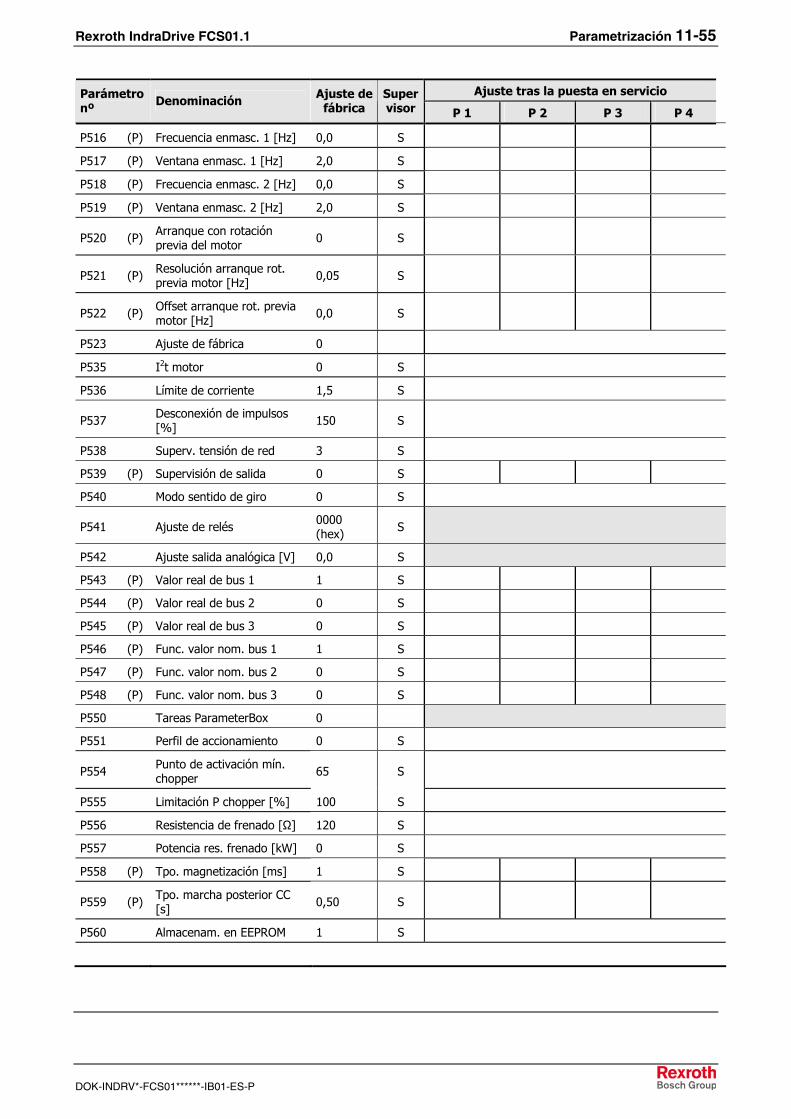
Rexroth IndraDrive FCS01.1 Parametrización 11-55
DOK-INDRV*-FCS01******-IB01-ES-P
Ajuste tras la puesta en servicio Parámetronº Denominación Ajuste de
fábrica Supervisor P 1 P 2 P 3 P 4
P516 (P) Frecuencia enmasc. 1 [Hz] 0,0 S
P517 (P) Ventana enmasc. 1 [Hz] 2,0 S
P518 (P) Frecuencia enmasc. 2 [Hz] 0,0 S
P519 (P) Ventana enmasc. 2 [Hz] 2,0 S
P520 (P) Arranque con rotación previa del motor 0 S
P521 (P) Resolución arranque rot. previa motor [Hz] 0,05 S
P522 (P) Offset arranque rot. previa motor [Hz] 0,0 S
P523 Ajuste de fábrica 0
P535 I2t motor 0 S
P536 Límite de corriente 1,5 S
P537 Desconexión de impulsos [%] 150 S
P538 Superv. tensión de red 3 S
P539 (P) Supervisión de salida 0 S
P540 Modo sentido de giro 0 S
P541 Ajuste de relés 0000 (hex) S
P542 Ajuste salida analógica [V] 0,0 S
P543 (P) Valor real de bus 1 1 S
P544 (P) Valor real de bus 2 0 S
P545 (P) Valor real de bus 3 0 S
P546 (P) Func. valor nom. bus 1 1 S
P547 (P) Func. valor nom. bus 2 0 S
P548 (P) Func. valor nom. bus 3 0 S
P550 Tareas ParameterBox 0
P551 Perfil de accionamiento 0 S
P554 Punto de activación mín. chopper 65 S
P555 Limitación P chopper [%] 100 S
P556 Resistencia de frenado [Ω] 120 S
P557 Potencia res. frenado [kW] 0 S
P558 (P) Tpo. magnetización [ms] 1 S
P559 (P) Tpo. marcha posterior CC [s] 0,50 S
P560 Almacenam. en EEPROM 1 S
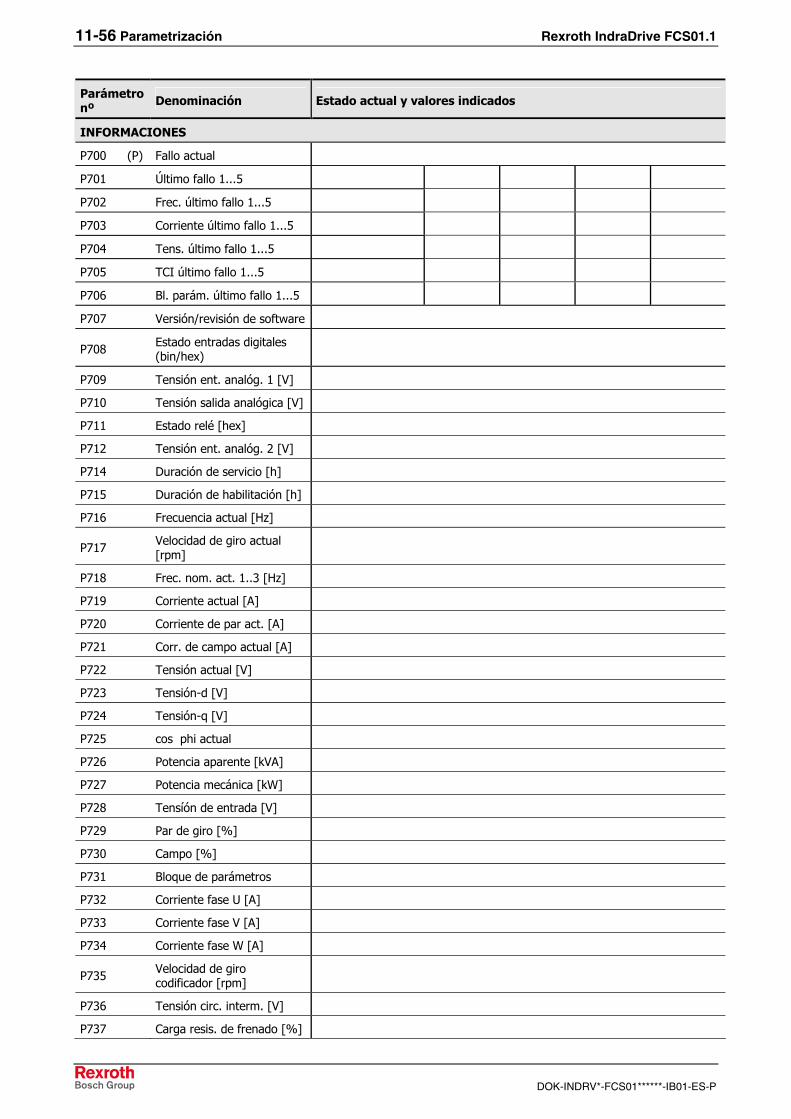
11-56 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetronº Denominación Estado actual y valores indicados
INFORMACIONES
P700 (P) Fallo actual
P701 Último fallo 1...5
P702 Frec. último fallo 1...5
P703 Corriente último fallo 1...5
P704 Tens. último fallo 1...5
P705 TCI último fallo 1...5
P706 Bl. parám. último fallo 1...5
P707 Versión/revisión de software
P708 Estado entradas digitales (bin/hex)
P709 Tensión ent. analóg. 1 [V]
P710 Tensión salida analógica [V]
P711 Estado relé [hex]
P712 Tensión ent. analóg. 2 [V]
P714 Duración de servicio [h]
P715 Duración de habilitación [h]
P716 Frecuencia actual [Hz]
P717 Velocidad de giro actual [rpm]
P718 Frec. nom. act. 1..3 [Hz]
P719 Corriente actual [A]
P720 Corriente de par act. [A]
P721 Corr. de campo actual [A]
P722 Tensión actual [V]
P723 Tensión-d [V]
P724 Tensión-q [V]
P725 cos phi actual
P726 Potencia aparente [kVA]
P727 Potencia mecánica [kW]
P728 Tensíón de entrada [V]
P729 Par de giro [%]
P730 Campo [%]
P731 Bloque de parámetros
P732 Corriente fase U [A]
P733 Corriente fase V [A]
P734 Corriente fase W [A]
P735 Velocidad de giro codificador [rpm]
P736 Tensión circ. interm. [V]
P737 Carga resis. de frenado [%]
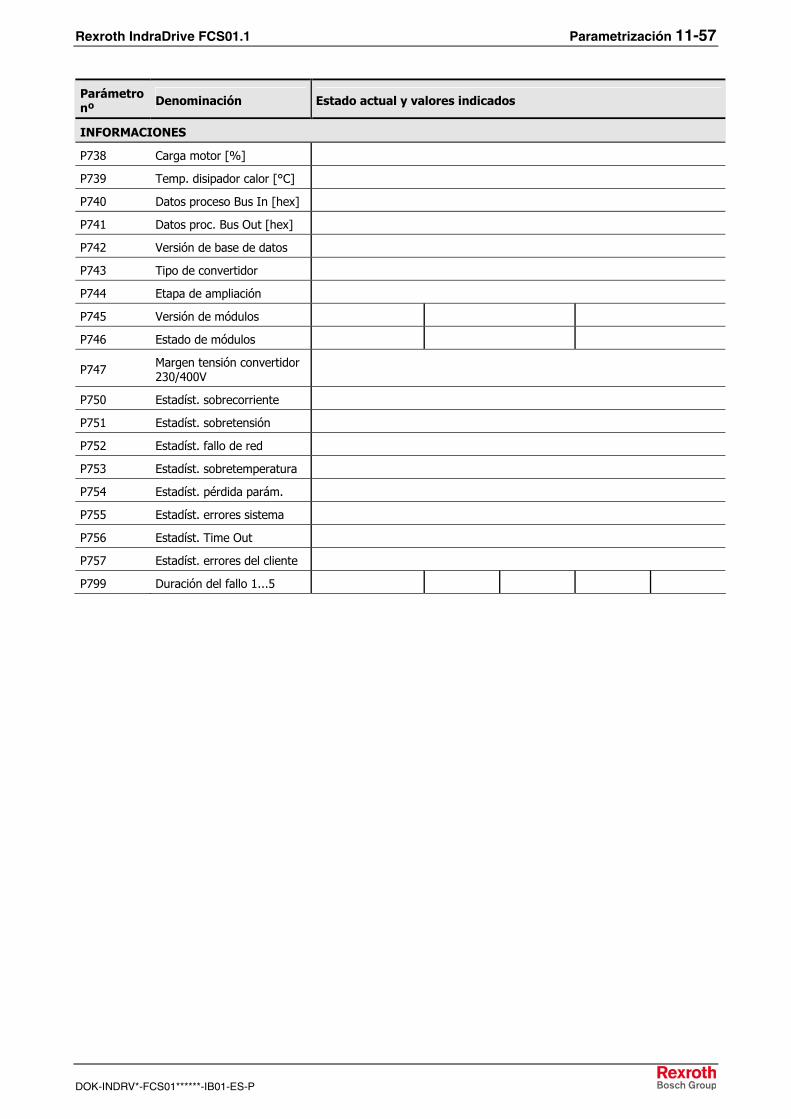
Rexroth IndraDrive FCS01.1 Parametrización 11-57
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetronº Denominación Estado actual y valores indicados
INFORMACIONES
P738 Carga motor [%]
P739 Temp. disipador calor [°C]
P740 Datos proceso Bus In [hex]
P741 Datos proc. Bus Out [hex]
P742 Versión de base de datos
P743 Tipo de convertidor
P744 Etapa de ampliación
P745 Versión de módulos
P746 Estado de módulos
P747 Margen tensión convertidor 230/400V
P750 Estadíst. sobrecorriente
P751 Estadíst. sobretensión
P752 Estadíst. fallo de red
P753 Estadíst. sobretemperatura
P754 Estadíst. pérdida parám.
P755 Estadíst. errores sistema
P756 Estadíst. Time Out
P757 Estadíst. errores del cliente
P799 Duración del fallo 1...5

11-58 Parametrización Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Rexroth IndraDrive FCS01.1 Mensajes de fallo 12-1
DOK-INDRV*-FCS01******-IB01-ES-P
12 Mensajes de fallo Los fallos pueden provocar la desconexión del convertidor de frecuencia.
Existen las siguientes posibilidades para restaurar un fallo (confirmar):
• desconectando y volviendo a conectar la alimentación de red, • mediante una entrada digital programada al efecto (P420 ... P424 =
función 12),
• retirando la "habilitación" del convertidor de frecuencia (si no hay programada ninguna entrada digital para la confirmación),
• mediante una confirmación de bus, o bien
• mediante P506, la confirmación automática de fallos.
12.1 Elementos de indicación en el aparato básico FCS01
En el estado de entrega hay dos LED (verde/rojo) debajo de la cubierta. Dichos LED indican el estado actual del aparato.
El LED verde indica la presencia de la tensión de red, y durante el funcionamiento indica el grado de sobrecarga en la salida del convertidor de frecuencia mediante un código de destellos de frecuencia creciente.
El LED rojo indica fallos pendientes, parpadeando con la frecuencia correspondiente al código numérico del fallo.
Ver también el capítulo 12 Mensajes de falloFehler! Es wurde kein Textmarkenname vergeben.Fehler! Es wurde kein Textmarkenname vergeben..
12.2 Indicación en los módulos funcionales FCC01.1T-xxx
El elemento de operación estándar indica un fallo con su número y una "E" antepuesta. Además, el fallo actual puede visualizarse en el parámetro P700. Los últimos mensajes de fallo se almacenan en el parámetro P701. En los parámetros P702 a P706 se ofrece información adicional sobre el estado del convertidor de frecuencia en el momento del fallo.
Si ya no está presente la causa del fallo, la indicación de fallo parpadea en el elemento de operación estándar, y se puede confirmar el fallo mediante la tecla Intro.
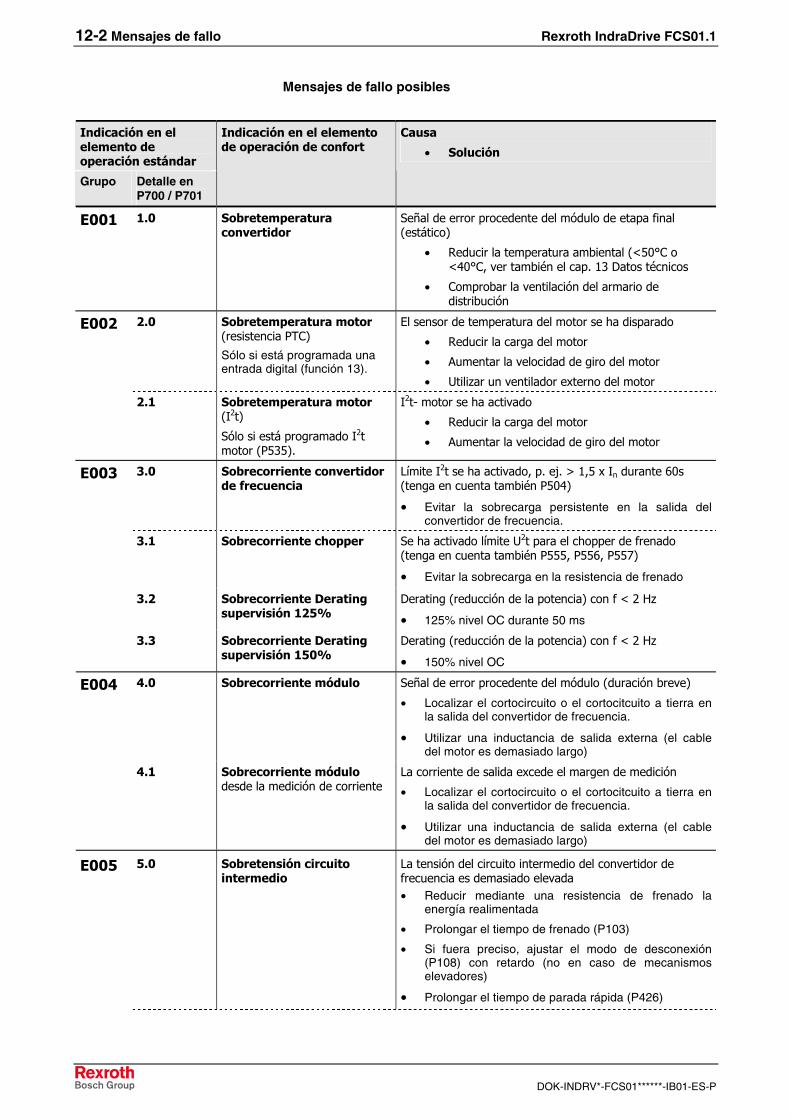
12-2 Mensajes de fallo Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Mensajes de fallo posibles
Indicación en el elemento de operación estándar
Grupo Detalle en P700 / P701
Indicación en el elemento de operación de confort
Causa
• Solución
E001 1.0 Sobretemperatura convertidor
Señal de error procedente del módulo de etapa final (estático)
• Reducir la temperatura ambiental (<50°C o <40°C, ver también el cap. 13 Datos técnicos
• Comprobar la ventilación del armario de distribución
E002 2.0 Sobretemperatura motor (resistencia PTC)
Sólo si está programada una entrada digital (función 13).
El sensor de temperatura del motor se ha disparado
• Reducir la carga del motor
• Aumentar la velocidad de giro del motor
• Utilizar un ventilador externo del motor
2.1 Sobretemperatura motor (I2t)
Sólo si está programado I2t motor (P535).
I2t- motor se ha activado
• Reducir la carga del motor
• Aumentar la velocidad de giro del motor
3.0 Sobrecorriente convertidor de frecuencia
Límite I2t se ha activado, p. ej. > 1,5 x In durante 60s (tenga en cuenta también P504)
• Evitar la sobrecarga persistente en la salida del convertidor de frecuencia.
3.1 Sobrecorriente chopper Se ha activado límite U2t para el chopper de frenado (tenga en cuenta también P555, P556, P557)
• Evitar la sobrecarga en la resistencia de frenado
3.2 Sobrecorriente Derating supervisión 125%
Derating (reducción de la potencia) con f < 2 Hz
• 125% nivel OC durante 50 ms
E003
3.3 Sobrecorriente Derating supervisión 150%
Derating (reducción de la potencia) con f < 2 Hz
• 150% nivel OC
4.0 Sobrecorriente módulo Señal de error procedente del módulo (duración breve)
• Localizar el cortocircuito o el cortocitcuito a tierra en la salida del convertidor de frecuencia.
• Utilizar una inductancia de salida externa (el cable del motor es demasiado largo)
E004
4.1 Sobrecorriente módulo desde la medición de corriente
La corriente de salida excede el margen de medición
• Localizar el cortocircuito o el cortocitcuito a tierra en la salida del convertidor de frecuencia.
• Utilizar una inductancia de salida externa (el cable del motor es demasiado largo)
E005 5.0 Sobretensión circuito intermedio
La tensión del circuito intermedio del convertidor de frecuencia es demasiado elevada • Reducir mediante una resistencia de frenado la
energía realimentada
• Prolongar el tiempo de frenado (P103)
• Si fuera preciso, ajustar el modo de desconexión (P108) con retardo (no en caso de mecanismos elevadores)
• Prolongar el tiempo de parada rápida (P426)
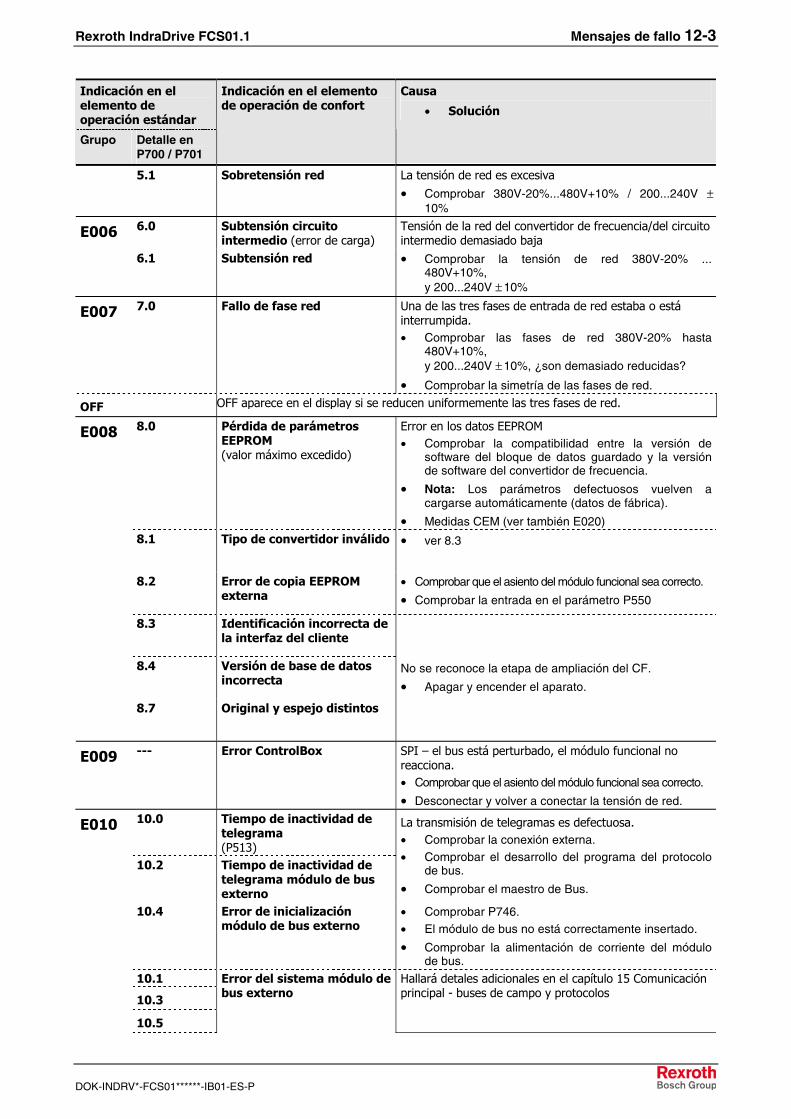
Rexroth IndraDrive FCS01.1 Mensajes de fallo 12-3
DOK-INDRV*-FCS01******-IB01-ES-P
Indicación en el elemento de operación estándar
Grupo Detalle en P700 / P701
Indicación en el elemento de operación de confort
Causa
• Solución
5.1 Sobretensión red La tensión de red es excesiva • Comprobar 380V-20%...480V+10% / 200...240V ±
10% 6.0 Subtensión circuito
intermedio (error de carga) E006
6.1 Subtensión red
Tensión de la red del convertidor de frecuencia/del circuito intermedio demasiado baja • Comprobar la tensión de red 380V-20% ...
480V+10%, y 200...240V ± 10%
E007 7.0 Fallo de fase red Una de las tres fases de entrada de red estaba o está interrumpida. • Comprobar las fases de red 380V-20% hasta
480V+10%, y 200...240V ± 10%, ¿son demasiado reducidas?
• Comprobar la simetría de las fases de red.
OFF OFF aparece en el display si se reducen uniformemente las tres fases de red.
8.0 Pérdida de parámetros EEPROM (valor máximo excedido)
Error en los datos EEPROM • Comprobar la compatibilidad entre la versión de
software del bloque de datos guardado y la versión de software del convertidor de frecuencia.
• Nota: Los parámetros defectuosos vuelven a cargarse automáticamente (datos de fábrica).
• Medidas CEM (ver también E020) 8.1 Tipo de convertidor inválido • ver 8.3
8.2 Error de copia EEPROM externa
• Comprobar que el asiento del módulo funcional sea correcto.
• Comprobar la entrada en el parámetro P550
8.3 Identificación incorrecta de la interfaz del cliente
8.4 Versión de base de datos incorrecta
E008
8.7 Original y espejo distintos
No se reconoce la etapa de ampliación del CF. • Apagar y encender el aparato.
E009 --- Error ControlBox SPI – el bus está perturbado, el módulo funcional no reacciona. • Comprobar que el asiento del módulo funcional sea correcto.
• Desconectar y volver a conectar la tensión de red. 10.0 Tiempo de inactividad de
telegrama (P513)
10.2 Tiempo de inactividad de telegrama módulo de bus externo
La transmisión de telegramas es defectuosa. • Comprobar la conexión externa. • Comprobar el desarrollo del programa del protocolo
de bus.
• Comprobar el maestro de Bus.
10.4 Error de inicialización módulo de bus externo
• Comprobar P746. • El módulo de bus no está correctamente insertado.
• Comprobar la alimentación de corriente del módulo de bus.
10.1
10.3
E010
10.5
Error del sistema módulo de bus externo
Hallará detales adicionales en el capítulo 15 Comunicación principal - buses de campo y protocolos
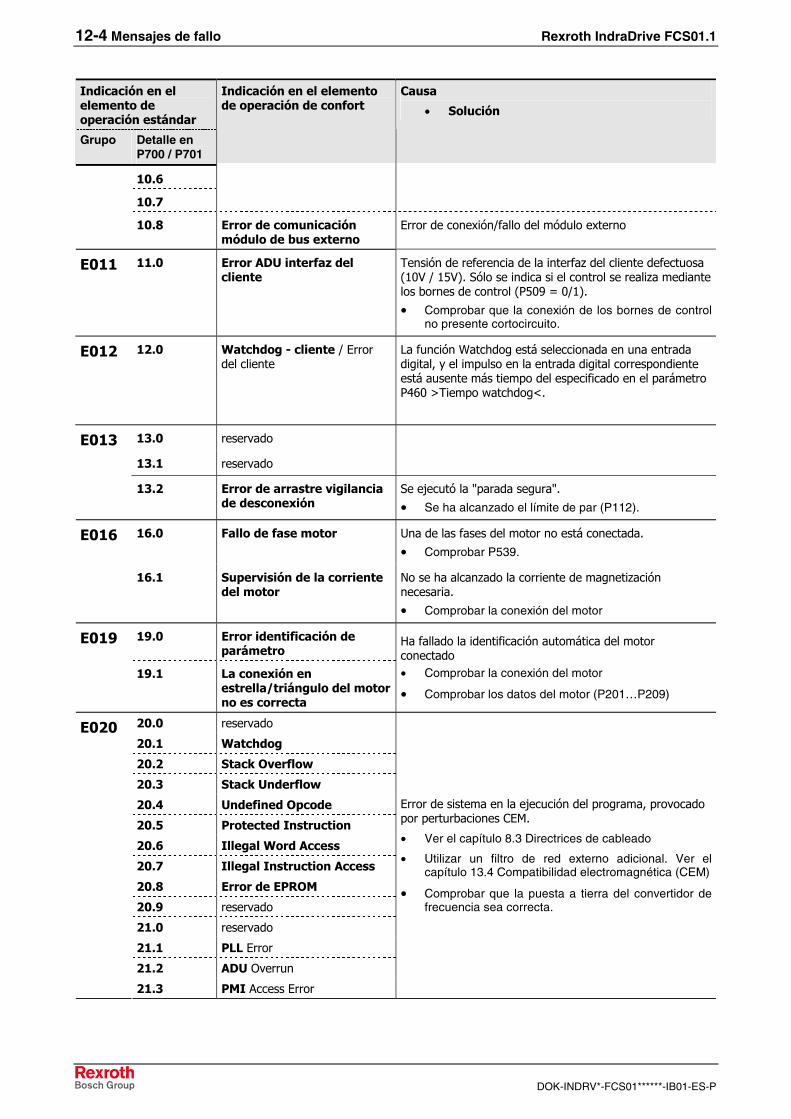
12-4 Mensajes de fallo Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Indicación en el elemento de operación estándar
Grupo Detalle en P700 / P701
Indicación en el elemento de operación de confort
Causa
• Solución
10.6
10.7
10.8 Error de comunicación módulo de bus externo
Error de conexión/fallo del módulo externo
E011 11.0 Error ADU interfaz del cliente
Tensión de referencia de la interfaz del cliente defectuosa (10V / 15V). Sólo se indica si el control se realiza mediante los bornes de control (P509 = 0/1). • Comprobar que la conexión de los bornes de control
no presente cortocircuito.
E012 12.0 Watchdog - cliente / Error del cliente
La función Watchdog está seleccionada en una entrada digital, y el impulso en la entrada digital correspondiente está ausente más tiempo del especificado en el parámetro P460 >Tiempo watchdog<.
13.0 reservado
13.1 reservado
E013
13.2 Error de arrastre vigilancia de desconexión
Se ejecutó la "parada segura". • Se ha alcanzado el límite de par (P112).
16.0 Fallo de fase motor Una de las fases del motor no está conectada. • Comprobar P539.
E016
16.1 Supervisión de la corriente del motor
No se ha alcanzado la corriente de magnetización necesaria. • Comprobar la conexión del motor
19.0 Error identificación de parámetro
E019
19.1 La conexión en estrella/triángulo del motor no es correcta
Ha fallado la identificación automática del motor conectado • Comprobar la conexión del motor
• Comprobar los datos del motor (P201…P209)
20.0 reservado
20.1 Watchdog
20.2 Stack Overflow
20.3 Stack Underflow
20.4 Undefined Opcode
20.5 Protected Instruction
20.6 Illegal Word Access
20.7 Illegal Instruction Access
20.8 Error de EPROM
20.9 reservado
21.0 reservado
21.1 PLL Error
21.2 ADU Overrun
E020
21.3 PMI Access Error
Error de sistema en la ejecución del programa, provocado por perturbaciones CEM.
• Ver el capítulo 8.3 Directrices de cableado
• Utilizar un filtro de red externo adicional. Ver el capítulo 13.4 Compatibilidad electromagnética (CEM)
• Comprobar que la puesta a tierra del convertidor de frecuencia sea correcta.
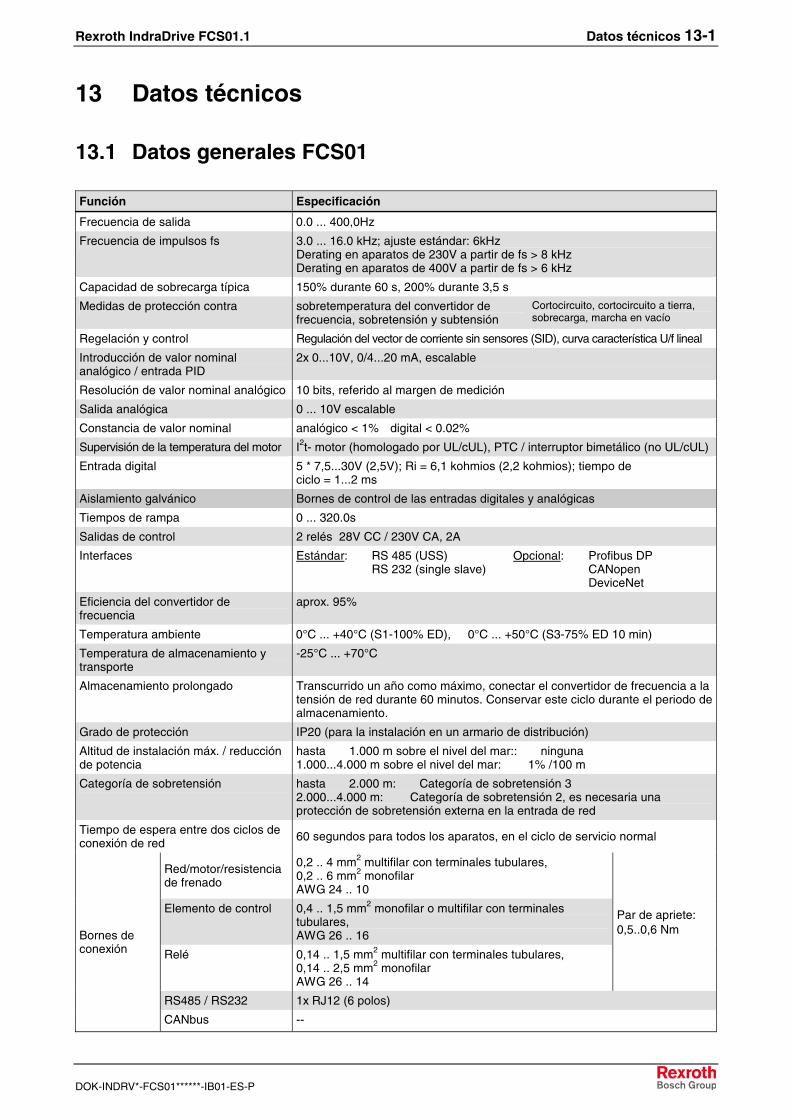
Rexroth IndraDrive FCS01.1 Datos técnicos 13-1
DOK-INDRV*-FCS01******-IB01-ES-P
13 Datos técnicos
13.1 Datos generales FCS01
Función Especificación
Frecuencia de salida 0.0 ... 400,0Hz
Frecuencia de impulsos fs 3.0 ... 16.0 kHz; ajuste estándar: 6kHz Derating en aparatos de 230V a partir de fs > 8 kHz Derating en aparatos de 400V a partir de fs > 6 kHz
Capacidad de sobrecarga típica 150% durante 60 s, 200% durante 3,5 s
Medidas de protección contra sobretemperatura del convertidor de frecuencia, sobretensión y subtensión
Cortocircuito, cortocircuito a tierra, sobrecarga, marcha en vacío
Regelación y control Regulación del vector de corriente sin sensores (SID), curva característica U/f lineal
Introducción de valor nominal analógico / entrada PID
2x 0...10V, 0/4...20 mA, escalable
Resolución de valor nominal analógico 10 bits, referido al margen de medición
Salida analógica 0 ... 10V escalable
Constancia de valor nominal analógico < 1% digital < 0.02%
Supervisión de la temperatura del motor I2t- motor (homologado por UL/cUL), PTC / interruptor bimetálico (no UL/cUL)
Entrada digital 5 * 7,5...30V (2,5V); Ri = 6,1 kohmios (2,2 kohmios); tiempo de ciclo = 1...2 ms
Aislamiento galvánico Bornes de control de las entradas digitales y analógicas
Tiempos de rampa 0 ... 320.0s
Salidas de control 2 relés 28V CC / 230V CA, 2A
Interfaces Estándar: RS 485 (USS) RS 232 (single slave)
Opcional: Profibus DP CANopen DeviceNet
Eficiencia del convertidor de frecuencia
aprox. 95%
Temperatura ambiente 0°C ... +40°C (S1-100% ED), 0°C ... +50°C (S3-75% ED 10 min)
Temperatura de almacenamiento y transporte
-25°C ... +70°C
Almacenamiento prolongado Transcurrido un año como máximo, conectar el convertidor de frecuencia a la tensión de red durante 60 minutos. Conservar este ciclo durante el periodo de almacenamiento.
Grado de protección IP20 (para la instalación en un armario de distribución)
Altitud de instalación máx. / reducción de potencia
hasta 1.000 m sobre el nivel del mar:: ninguna 1.000...4.000 m sobre el nivel del mar: 1% /100 m
Categoría de sobretensión hasta 2.000 m: Categoría de sobretensión 3 2.000...4.000 m: Categoría de sobretensión 2, es necesaria una protección de sobretensión externa en la entrada de red
Tiempo de espera entre dos ciclos de conexión de red 60 segundos para todos los aparatos, en el ciclo de servicio normal
Red/motor/resistencia de frenado
0,2 .. 4 mm2 multifilar con terminales tubulares, 0,2 .. 6 mm2 monofilar AWG 24 .. 10
Elemento de control 0,4 .. 1,5 mm2 monofilar o multifilar con terminales tubulares, AWG 26 .. 16
Relé 0,14 .. 1,5 mm2 multifilar con terminales tubulares, 0,14 .. 2,5 mm2 monofilar AWG 26 .. 14
Par de apriete: 0,5..0,6 Nm
RS485 / RS232 1x RJ12 (6 polos)
Bornes de conexión
CANbus --
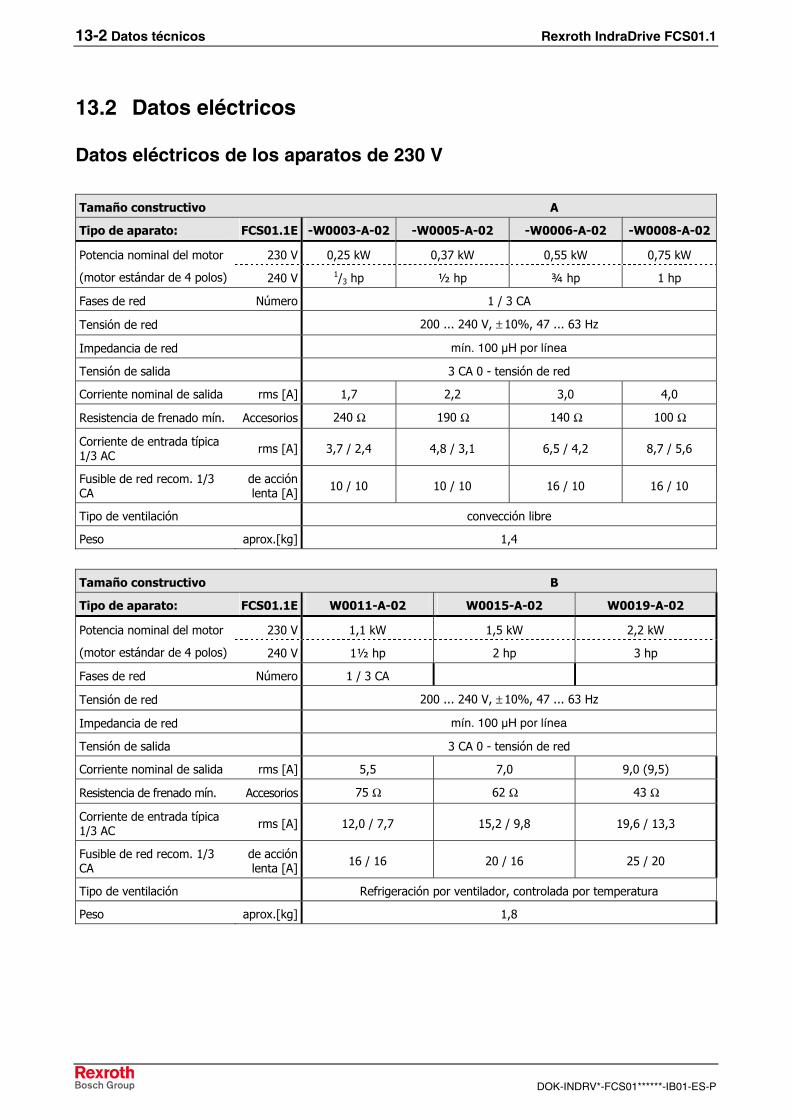
13-2 Datos técnicos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
13.2 Datos eléctricos
Datos eléctricos de los aparatos de 230 V
Tamaño constructivo A
Tipo de aparato: FCS01.1E -W0003-A-02 -W0005-A-02 -W0006-A-02 -W0008-A-02
230 V 0,25 kW 0,37 kW 0,55 kW 0,75 kW Potencia nominal del motor
(motor estándar de 4 polos) 240 V 1/3 hp ½ hp ¾ hp 1 hp
Fases de red Número 1 / 3 CA
Tensión de red 200 ... 240 V, ± 10%, 47 ... 63 Hz
Impedancia de red mín. 100 µH por línea
Tensión de salida 3 CA 0 - tensión de red
Corriente nominal de salida rms [A] 1,7 2,2 3,0 4,0
Resistencia de frenado mín. Accesorios 240 Ω 190 Ω 140 Ω 100 Ω
Corriente de entrada típica 1/3 AC rms [A] 3,7 / 2,4 4,8 / 3,1 6,5 / 4,2 8,7 / 5,6
Fusible de red recom. 1/3 CA
de acción lenta [A] 10 / 10 10 / 10 16 / 10 16 / 10
Tipo de ventilación convección libre
Peso aprox.[kg] 1,4
Tamaño constructivo B
Tipo de aparato: FCS01.1E W0011-A-02 W0015-A-02 W0019-A-02
230 V 1,1 kW 1,5 kW 2,2 kW Potencia nominal del motor
(motor estándar de 4 polos) 240 V 1½ hp 2 hp 3 hp
Fases de red Número 1 / 3 CA
Tensión de red 200 ... 240 V, ± 10%, 47 ... 63 Hz
Impedancia de red mín. 100 µH por línea
Tensión de salida 3 CA 0 - tensión de red
Corriente nominal de salida rms [A] 5,5 7,0 9,0 (9,5)
Resistencia de frenado mín. Accesorios 75 Ω 62 Ω 43 Ω
Corriente de entrada típica 1/3 AC rms [A] 12,0 / 7,7 15,2 / 9,8 19,6 / 13,3
Fusible de red recom. 1/3 CA
de acción lenta [A] 16 / 16 20 / 16 25 / 20
Tipo de ventilación Refrigeración por ventilador, controlada por temperatura
Peso aprox.[kg] 1,8
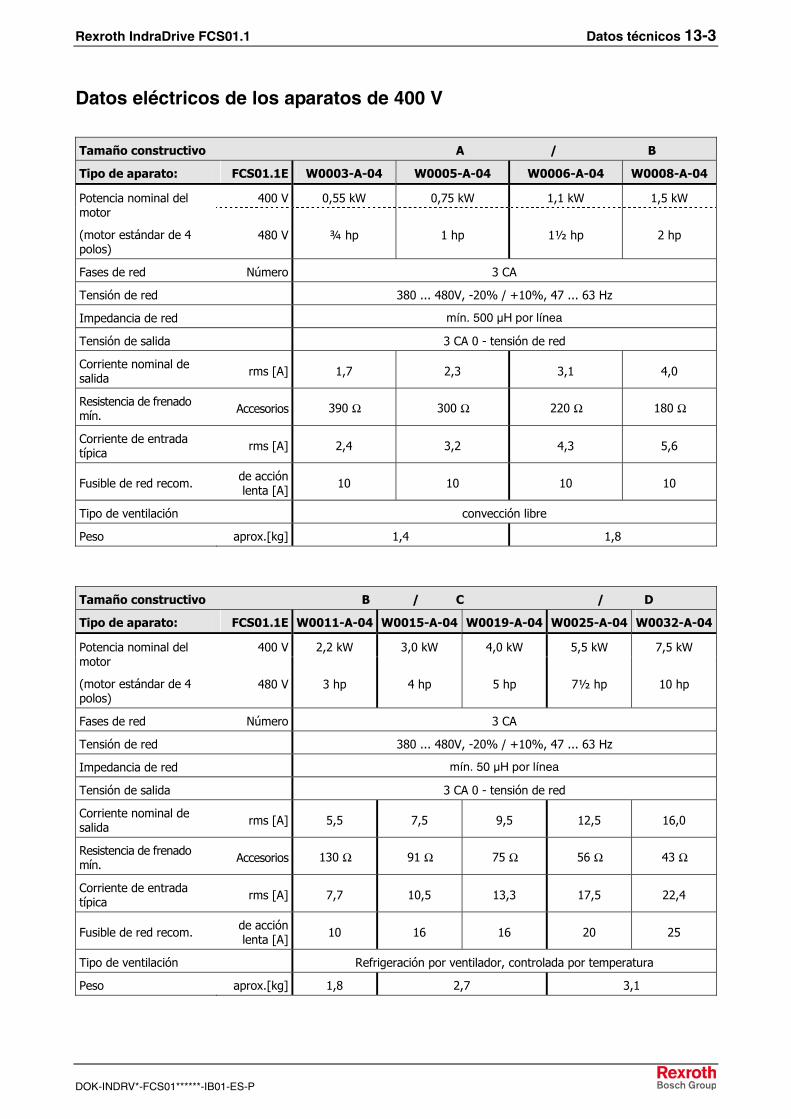
Rexroth IndraDrive FCS01.1 Datos técnicos 13-3
DOK-INDRV*-FCS01******-IB01-ES-P
Datos eléctricos de los aparatos de 400 V
Tamaño constructivo A / B
Tipo de aparato: FCS01.1E W0003-A-04 W0005-A-04 W0006-A-04 W0008-A-04
400 V 0,55 kW 0,75 kW 1,1 kW 1,5 kW Potencia nominal del motor
(motor estándar de 4 polos)
480 V ¾ hp 1 hp 1½ hp 2 hp
Fases de red Número 3 CA
Tensión de red 380 ... 480V, -20% / +10%, 47 ... 63 Hz
Impedancia de red mín. 500 µH por línea
Tensión de salida 3 CA 0 - tensión de red
Corriente nominal de salida rms [A] 1,7 2,3 3,1 4,0
Resistencia de frenado mín. Accesorios 390 Ω 300 Ω 220 Ω 180 Ω
Corriente de entrada típica rms [A] 2,4 3,2 4,3 5,6
Fusible de red recom. de acción lenta [A] 10 10 10 10
Tipo de ventilación convección libre
Peso aprox.[kg] 1,4 1,8
Tamaño constructivo B / C / D
Tipo de aparato: FCS01.1E W0011-A-04 W0015-A-04 W0019-A-04 W0025-A-04 W0032-A-04
400 V 2,2 kW 3,0 kW 4,0 kW 5,5 kW 7,5 kW Potencia nominal del motor
(motor estándar de 4 polos)
480 V 3 hp 4 hp 5 hp 7½ hp 10 hp
Fases de red Número 3 CA
Tensión de red 380 ... 480V, -20% / +10%, 47 ... 63 Hz
Impedancia de red mín. 50 µH por línea
Tensión de salida 3 CA 0 - tensión de red
Corriente nominal de salida rms [A] 5,5 7,5 9,5 12,5 16,0
Resistencia de frenado mín. Accesorios 130 Ω 91 Ω 75 Ω 56 Ω 43 Ω
Corriente de entrada típica rms [A] 7,7 10,5 13,3 17,5 22,4
Fusible de red recom. de acción lenta [A] 10 16 16 20 25
Tipo de ventilación Refrigeración por ventilador, controlada por temperatura
Peso aprox.[kg] 1,8 2,7 3,1
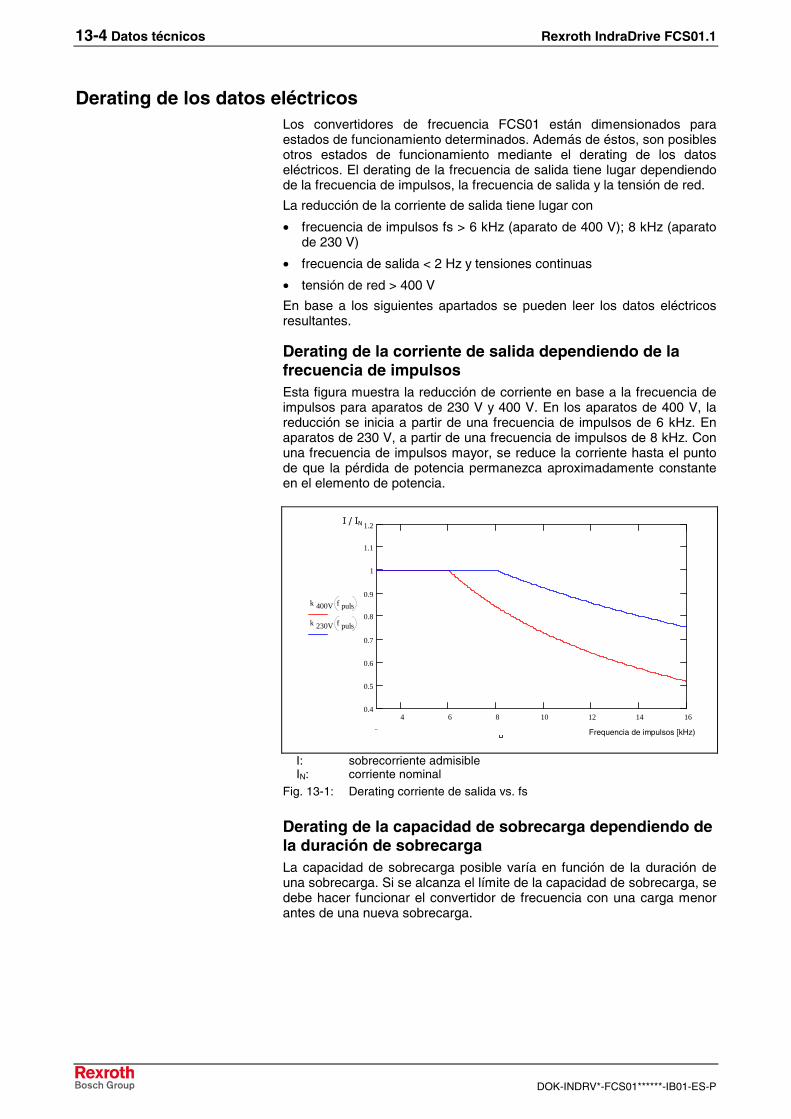
13-4 Datos técnicos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Derating de los datos eléctricos Los convertidores de frecuencia FCS01 están dimensionados para estados de funcionamiento determinados. Además de éstos, son posibles otros estados de funcionamiento mediante el derating de los datos eléctricos. El derating de la frecuencia de salida tiene lugar dependiendo de la frecuencia de impulsos, la frecuencia de salida y la tensión de red.
La reducción de la corriente de salida tiene lugar con
• frecuencia de impulsos fs > 6 kHz (aparato de 400 V); 8 kHz (aparato de 230 V)
• frecuencia de salida < 2 Hz y tensiones continuas
• tensión de red > 400 V
En base a los siguientes apartados se pueden leer los datos eléctricos resultantes.
Derating de la corriente de salida dependiendo de la frecuencia de impulsos Esta figura muestra la reducción de corriente en base a la frecuencia de impulsos para aparatos de 230 V y 400 V. En los aparatos de 400 V, la reducción se inicia a partir de una frecuencia de impulsos de 6 kHz. En aparatos de 230 V, a partir de una frecuencia de impulsos de 8 kHz. Con una frecuencia de impulsos mayor, se reduce la corriente hasta el punto de que la pérdida de potencia permanezca aproximadamente constante en el elemento de potencia.
1.2
0.4
k 400V f puls
k 230V f puls
163 f puls
4 6 8 10 12 14 160.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
I / IN
Pulsfrequenz [kHz]
I: sobrecorriente admisible IN: corriente nominal
Fig. 13-1: Derating corriente de salida vs. fs
Derating de la capacidad de sobrecarga dependiendo de la duración de sobrecarga La capacidad de sobrecarga posible varía en función de la duración de una sobrecarga. Si se alcanza el límite de la capacidad de sobrecarga, se debe hacer funcionar el convertidor de frecuencia con una carga menor antes de una nueva sobrecarga.
Frequencia de impulsos [kHz)
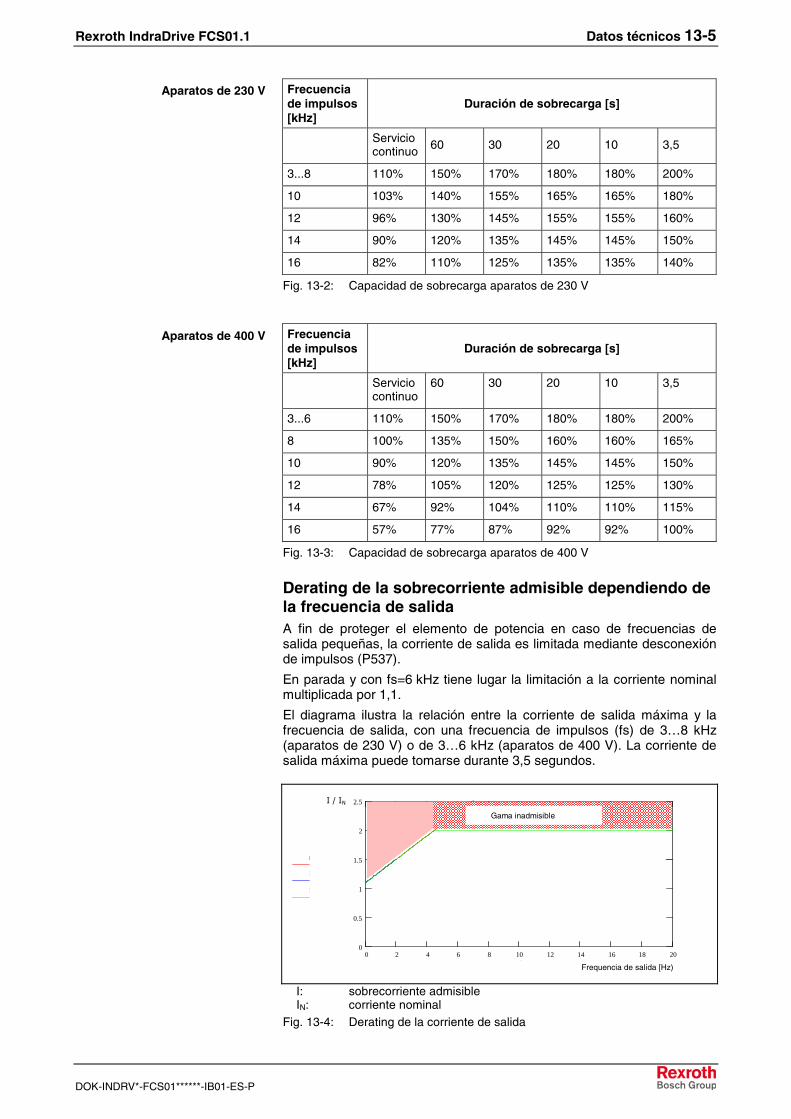
Rexroth IndraDrive FCS01.1 Datos técnicos 13-5
DOK-INDRV*-FCS01******-IB01-ES-P
Frecuencia de impulsos [kHz]
Duración de sobrecarga [s]
Servicio continuo 60 30 20 10 3,5
3...8 110% 150% 170% 180% 180% 200%
10 103% 140% 155% 165% 165% 180%
12 96% 130% 145% 155% 155% 160%
14 90% 120% 135% 145% 145% 150%
16 82% 110% 125% 135% 135% 140%
Fig. 13-2: Capacidad de sobrecarga aparatos de 230 V
Frecuencia de impulsos [kHz]
Duración de sobrecarga [s]
Servicio continuo
60 30 20 10 3,5
3...6 110% 150% 170% 180% 180% 200%
8 100% 135% 150% 160% 160% 165%
10 90% 120% 135% 145% 145% 150%
12 78% 105% 120% 125% 125% 130%
14 67% 92% 104% 110% 110% 115%
16 57% 77% 87% 92% 92% 100%
Fig. 13-3: Capacidad de sobrecarga aparatos de 400 V
Derating de la sobrecorriente admisible dependiendo de la frecuencia de salida A fin de proteger el elemento de potencia en caso de frecuencias de salida pequeñas, la corriente de salida es limitada mediante desconexión de impulsos (P537).
En parada y con fs=6 kHz tiene lugar la limitación a la corriente nominal multiplicada por 1,1.
El diagrama ilustra la relación entre la corriente de salida máxima y la frecuencia de salida, con una frecuencia de impulsos (fs) de 3…8 kHz (aparatos de 230 V) o de 3…6 kHz (aparatos de 400 V). La corriente de salida máxima puede tomarse durante 3,5 segundos.
ax f( )
5In_60sec f( )
0In_1sec f( )
f0 2 4 6 8 10 12 14 16 18 20
0
0.5
1
1.5
2
2.5
I / IN
Ausgangsfrequenz [Hz]
unzulässiger Bereich
I: sobrecorriente admisible IN: corriente nominal
Fig. 13-4: Derating de la corriente de salida
Aparatos de 230 V
Aparatos de 400 V
Gama inadmisible
Frequencia de salida [Hz)
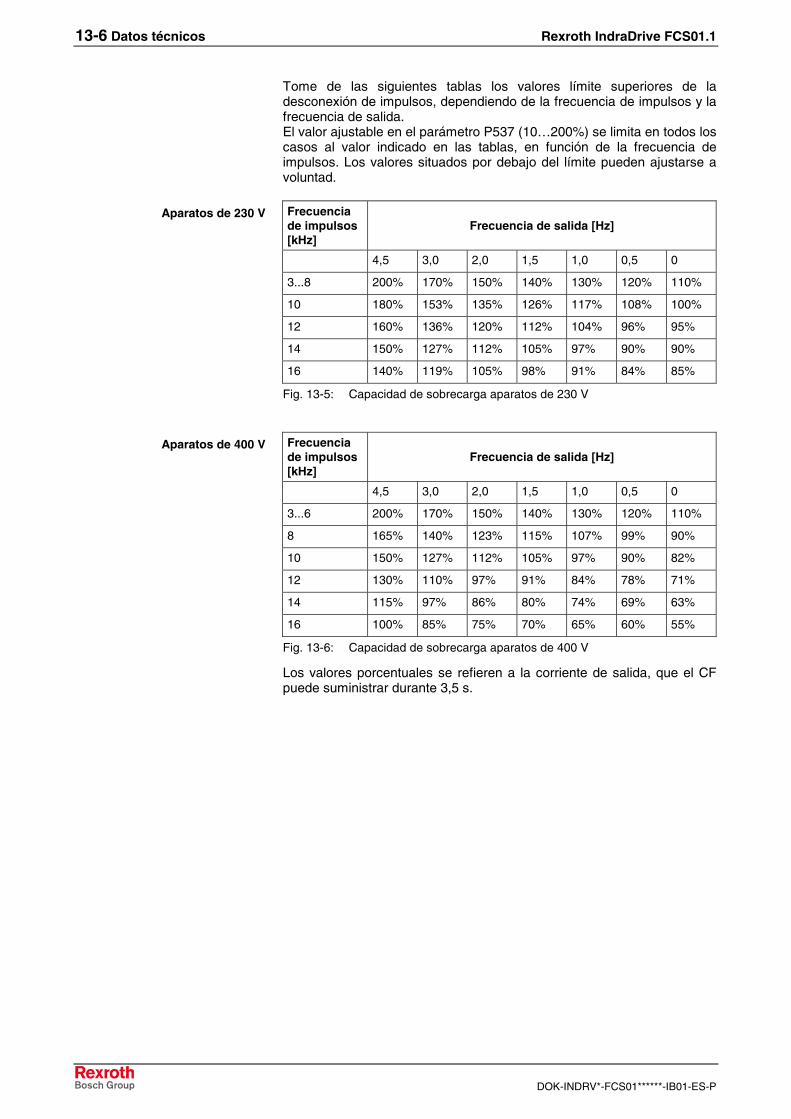
13-6 Datos técnicos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Tome de las siguientes tablas los valores límite superiores de la desconexión de impulsos, dependiendo de la frecuencia de impulsos y la frecuencia de salida. El valor ajustable en el parámetro P537 (10…200%) se limita en todos los casos al valor indicado en las tablas, en función de la frecuencia de impulsos. Los valores situados por debajo del límite pueden ajustarse a voluntad.
Frecuencia de impulsos [kHz]
Frecuencia de salida [Hz]
4,5 3,0 2,0 1,5 1,0 0,5 0
3...8 200% 170% 150% 140% 130% 120% 110%
10 180% 153% 135% 126% 117% 108% 100%
12 160% 136% 120% 112% 104% 96% 95%
14 150% 127% 112% 105% 97% 90% 90%
16 140% 119% 105% 98% 91% 84% 85%
Fig. 13-5: Capacidad de sobrecarga aparatos de 230 V
Frecuencia de impulsos [kHz]
Frecuencia de salida [Hz]
4,5 3,0 2,0 1,5 1,0 0,5 0
3...6 200% 170% 150% 140% 130% 120% 110%
8 165% 140% 123% 115% 107% 99% 90%
10 150% 127% 112% 105% 97% 90% 82%
12 130% 110% 97% 91% 84% 78% 71%
14 115% 97% 86% 80% 74% 69% 63%
16 100% 85% 75% 70% 65% 60% 55%
Fig. 13-6: Capacidad de sobrecarga aparatos de 400 V
Los valores porcentuales se refieren a la corriente de salida, que el CF puede suministrar durante 3,5 s.
Aparatos de 230 V
Aparatos de 400 V
Rexroth IndraDrive FCS01.1 Datos técnicos 13-7
DOK-INDRV*-FCS01******-IB01-ES-P
Sobrecorriente reducida según la tensión de red Los aparatos FCS01 están dimensionados térmicamente para las corrientes nominales. Esta corriente nominal está disponible con la tensión nominal especificada. En caso de tensiones de red distintas en el margen admisible, se deben tener en cuenta los siguientes aspectos:
• Ured<Unom: En caso de tensiones de red situadas por debajo de la tensión nominal, no se pueden tomar grandes corrientes, a fin de que la potencia suministrada permanezca constante.
• Ured>Unom: En caso de tensiones de red superiores a la tensión nominal, tiene lugar una reducción de las corrientes constantes de salida admisibles, a fin de compensar las mayores pérdidas de conmutación.
1.2
0.4
k Unetz Unetz( )
480320 Unetz320 340 360 380 400 420 440 460 480
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
Netzspannung [V]
I / IN
I: sobrecorriente admisible IN: corriente nominal
Fig. 13-7: Derating vs. Ured.
Tension de red [V]
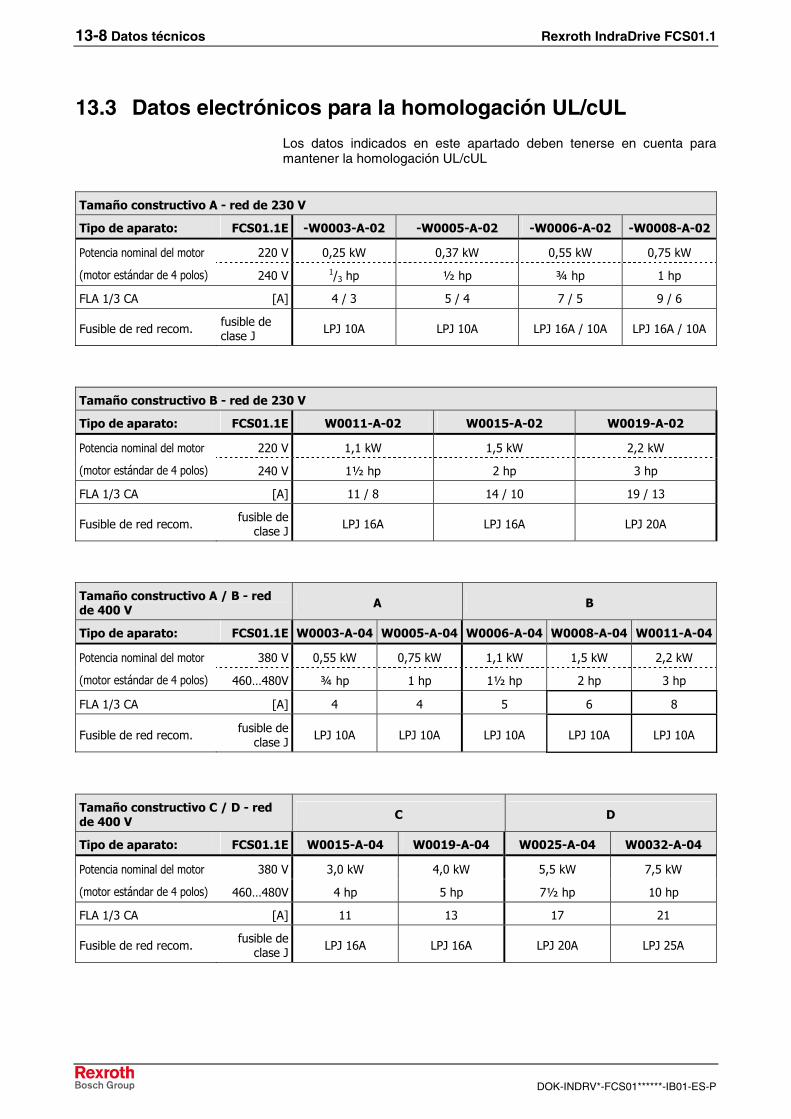
13-8 Datos técnicos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
13.3 Datos electrónicos para la homologación UL/cUL
Los datos indicados en este apartado deben tenerse en cuenta para mantener la homologación UL/cUL
Tamaño constructivo A - red de 230 V
Tipo de aparato: FCS01.1E -W0003-A-02 -W0005-A-02 -W0006-A-02 -W0008-A-02
220 V 0,25 kW 0,37 kW 0,55 kW 0,75 kW Potencia nominal del motor
(motor estándar de 4 polos) 240 V 1/3 hp ½ hp ¾ hp 1 hp
FLA 1/3 CA [A] 4 / 3 5 / 4 7 / 5 9 / 6
Fusible de red recom. fusible de clase J LPJ 10A LPJ 10A LPJ 16A / 10A LPJ 16A / 10A
Tamaño constructivo B - red de 230 V
Tipo de aparato: FCS01.1E W0011-A-02 W0015-A-02 W0019-A-02
220 V 1,1 kW 1,5 kW 2,2 kW Potencia nominal del motor
(motor estándar de 4 polos) 240 V 1½ hp 2 hp 3 hp
FLA 1/3 CA [A] 11 / 8 14 / 10 19 / 13
Fusible de red recom. fusible de clase J LPJ 16A LPJ 16A LPJ 20A
Tamaño constructivo A / B - red de 400 V A B
Tipo de aparato: FCS01.1E W0003-A-04 W0005-A-04 W0006-A-04 W0008-A-04 W0011-A-04
380 V 0,55 kW 0,75 kW 1,1 kW 1,5 kW 2,2 kW Potencia nominal del motor
(motor estándar de 4 polos) 460…480V ¾ hp 1 hp 1½ hp 2 hp 3 hp
FLA 1/3 CA [A] 4 4 5 6 8
Fusible de red recom. fusible de clase J LPJ 10A LPJ 10A LPJ 10A LPJ 10A LPJ 10A
Tamaño constructivo C / D - red de 400 V C D
Tipo de aparato: FCS01.1E W0015-A-04 W0019-A-04 W0025-A-04 W0032-A-04
380 V 3,0 kW 4,0 kW 5,5 kW 7,5 kW Potencia nominal del motor
(motor estándar de 4 polos) 460…480V 4 hp 5 hp 7½ hp 10 hp
FLA 1/3 CA [A] 11 13 17 21
Fusible de red recom. fusible de clase J LPJ 16A LPJ 16A LPJ 20A LPJ 25A
Rexroth IndraDrive FCS01.1 Datos técnicos 13-9
DOK-INDRV*-FCS01******-IB01-ES-P
13.4 Compatibilidad electromagnética (CEM)
De cara a la conformidad, cabe distinguir entre los siguientes casos:
• entrega de los componentes del accionamiento
• recepción de una máquina o instalación con los componentes del accionamiento montados
Con arreglo a las normativas, existen dos posibilidades para componentes del accionamiento que se utilizan para el procesamiento ulterior:
• Entrega sin conformidad según la Directiva CEM. La conformidad del producto final es determinada por el fabricante del producto final con los componentes del accionamiento montados. En este caso, la marca CE en el componente del accionamiento se refiere exclusivamente a la Directiva de baja tensión.
• Entrega conforme a la Directiva CEM, según la norma de producto EN 61800-3. En este caso, la comprobación se lleva a cabo en una configuración del sistema típica. La conformidad del producto final es determinada por el fabricante del producto final o bien determinada directamente en el producto final. La conformidad según la Directiva CEM está en preparación para el IndraDrive F.
Para la recepción de la máquina o instalación se aplican las normas de producto para el tipo correspondiente de máquina/instalación, en la medida en que existan. Especialmente en los últimos años se han implantado, o están en fase de elaboración, algunas nuevas normas de producto para determinados tipos de máquinas. En éstas se hace alusión a la norma de producto EN 61800-3 para accionamientos, o se especifican requisitos más elevados que requieren unos costes de filtrado e instalación mayores. Si el fabricante de la máquina/instalación desea comercializarla, su producto final "máquina/instalación" debe cumplir la norma de producto relevante para su máquina/instalación. A ello suelen referirse los organismos responsables y los laboratorios de ensayos para CEM.
El rendimiento CEM, que puede alcanzarse mediante un sistema de accionamiento consistente en los componentes estándar en una máquina o instalación, está en preparación. Aquí se exponen también las condiciones bajo las cuales puede alcanzarse el rendimiento CEM especificado.
Nota: Los convertidores de frecuencia FCS01 están previstos exclusivamente para usos comerciales. En consecuencia, no están sujetos a los requisitos de la norma EN 61000-3-2 sobre la emisión de corrientes armónicas.
Entrega de los componentes del accionamiento
recepción de una máquina o instalación con los
componentes del accionamiento montados
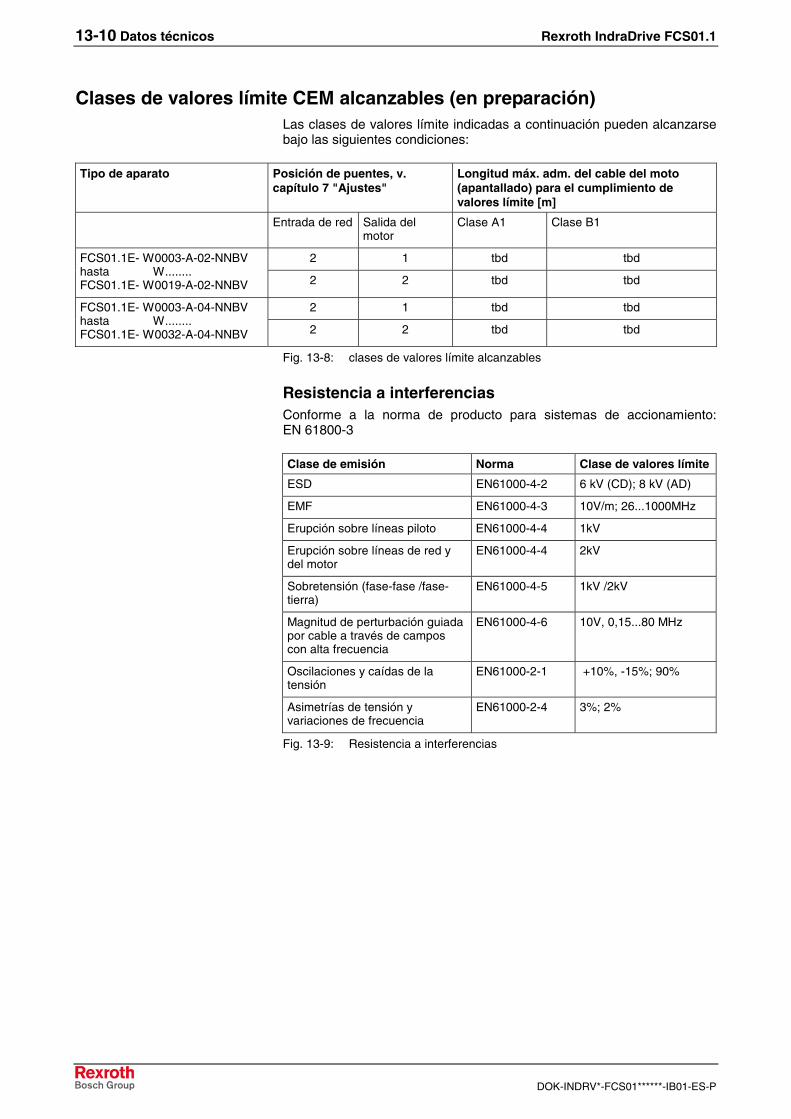
13-10 Datos técnicos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Clases de valores límite CEM alcanzables (en preparación) Las clases de valores límite indicadas a continuación pueden alcanzarse bajo las siguientes condiciones:
Tipo de aparato Posición de puentes, v. capítulo 7 "Ajustes"
Longitud máx. adm. del cable del moto (apantallado) para el cumplimiento de valores límite [m]
Entrada de red Salida del motor
Clase A1 Clase B1
2 1 tbd tbd FCS01.1E- W0003-A-02-NNBV hasta W........ FCS01.1E- W0019-A-02-NNBV 2 2 tbd tbd
2 1 tbd tbd FCS01.1E- W0003-A-04-NNBV hasta W........ FCS01.1E- W0032-A-04-NNBV 2 2 tbd tbd
Fig. 13-8: clases de valores límite alcanzables
Resistencia a interferencias Conforme a la norma de producto para sistemas de accionamiento: EN 61800-3
Clase de emisión Norma Clase de valores límite
ESD EN61000-4-2 6 kV (CD); 8 kV (AD)
EMF EN61000-4-3 10V/m; 26...1000MHz
Erupción sobre líneas piloto EN61000-4-4 1kV
Erupción sobre líneas de red y del motor
EN61000-4-4 2kV
Sobretensión (fase-fase /fase-tierra)
EN61000-4-5 1kV /2kV
Magnitud de perturbación guiada por cable a través de campos con alta frecuencia
EN61000-4-6 10V, 0,15...80 MHz
Oscilaciones y caídas de la tensión
EN61000-2-1 +10%, -15%; 90%
Asimetrías de tensión y variaciones de frecuencia
EN61000-2-4 3%; 2%
Fig. 13-9: Resistencia a interferencias
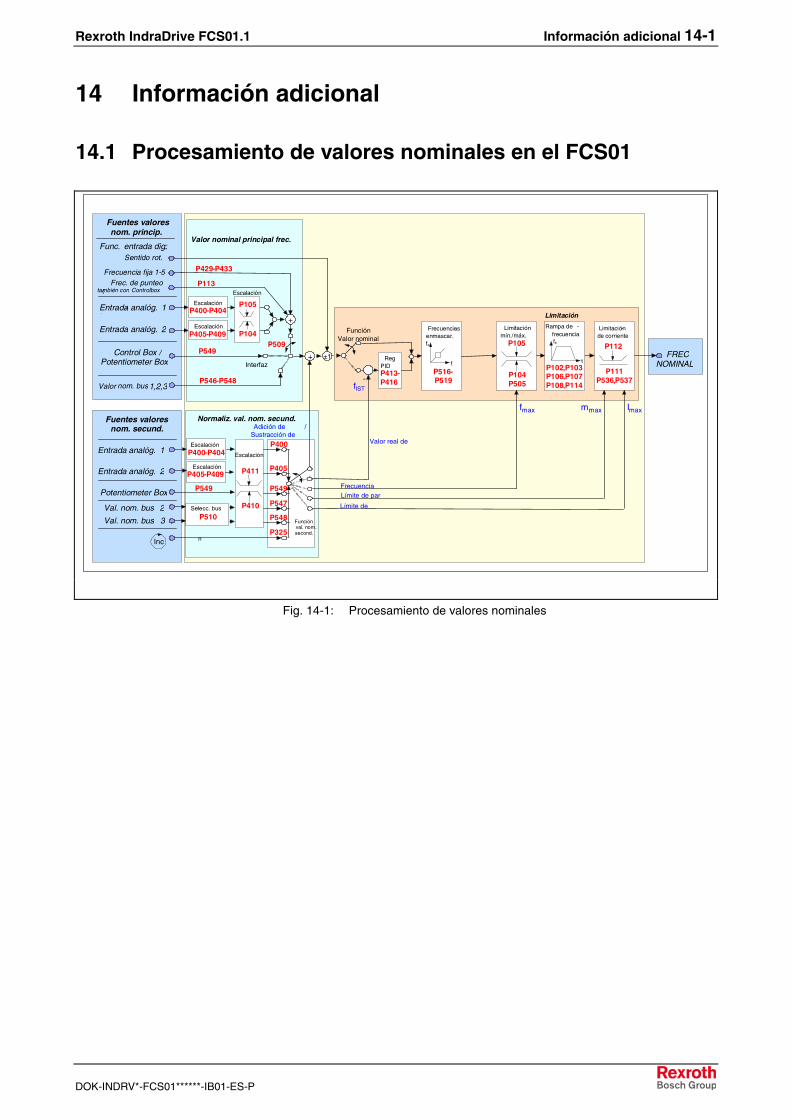
Rexroth IndraDrive FCS01.1 Información adicional 14-1
DOK-INDRV*-FCS01******-IB01-ES-P
14 Información adicional
14.1 Procesamiento de valores nominales en el FCS01
Entradal
- analóg. 1
Entrada analóg. 2
Valor nom. bus 1,2,3
Fuentes valores nom. princip.
Entrada analóg. 1
Entrada analóg. 2
Val. nom. bus 3
Val. nom. bus 2
n
P411
P410
Escalación
+
P105
P104P505
Limitaciónmín./máx.
Frecuencia fija 1-5
P112
P111 P536 , P537
Limitación - de corriente
-
P429 - P433
Frecuencias-enmascar.
P516-P519
fs
f
fIST
P413-P416
Función val. nom. second.
FunciónValor nominal
f max
P509
Inc
m max
P400
P405
P549
P547
P325
Límite de parFrecuencia
á i
FRECNOMINAL
Límite de i
I max
Interfaz
Fuentes valores nom. secund.
P546 - P548
Control Box / Potentiometer Box
Potentiometer Box
P548
Normaliz. val. nom. secund. -
Valor nominal principal frec.
P400 - P404 Escalación
RegPID
-
fs
t
Rampa de - frecuencia
P102 , P103 P106 , P107 P108 , P114
Limitación
P510 Selecc. bus
Frec. de punteo ( también con Controlbox
P113
+
Func. entrada dig. :
P549 ±1
Adición de / Sustracción de
Sentido rot.
Valor real de f i
P405 - P409 Escalación
P105
P104
Escalación
P400 - P404 Escalación
P405 - P409 Escalación
P549
Fig. 14-1: Procesamiento de valores nominales
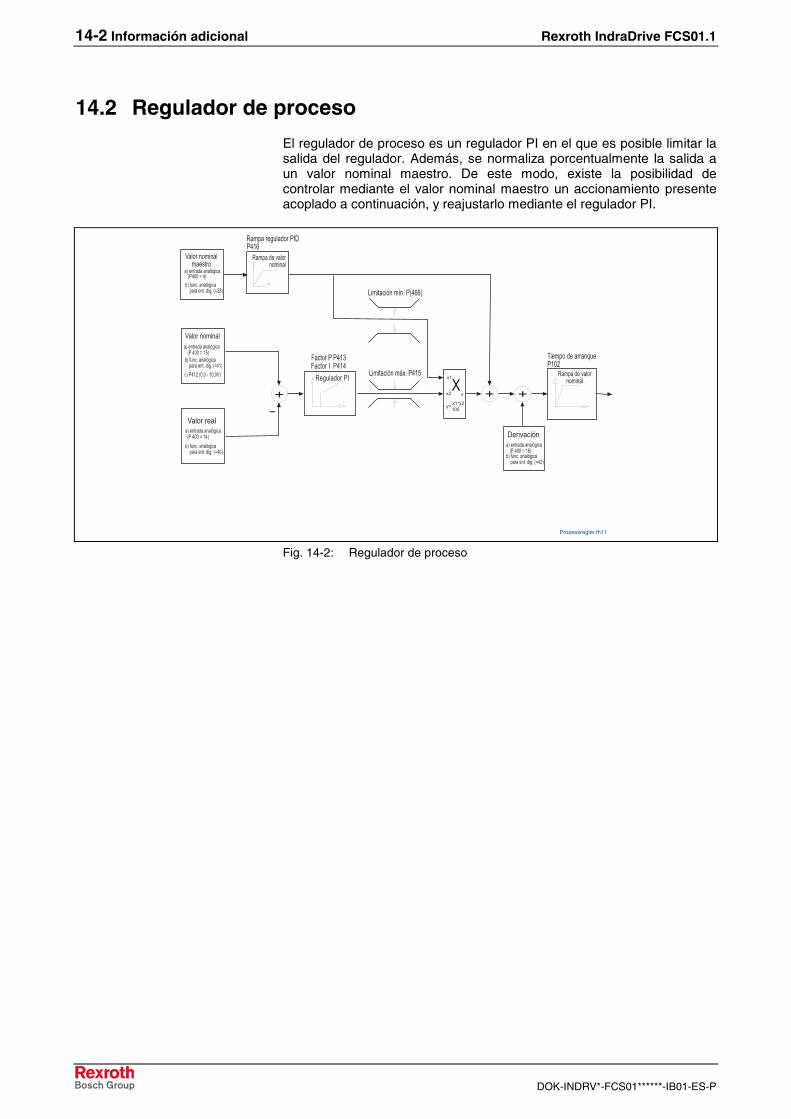
14-2 Información adicional Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
14.2 Regulador de proceso
El regulador de proceso es un regulador PI en el que es posible limitar la salida del regulador. Además, se normaliza porcentualmente la salida a un valor nominal maestro. De este modo, existe la posibilidad de controlar mediante el valor nominal maestro un accionamiento presente acoplado a continuación, y reajustarlo mediante el regulador PI.
!"#
$%!&
'
"(##
)%
% *
%+%*(
'
#",,'#
"(&##
-
'.
#"(#
-/
"(##
0#1 !!!"(#
0#1 !!!"(#
0#1 !!!"(2#
0#1 !!!"(#
Fig. 14-2: Regulador de proceso
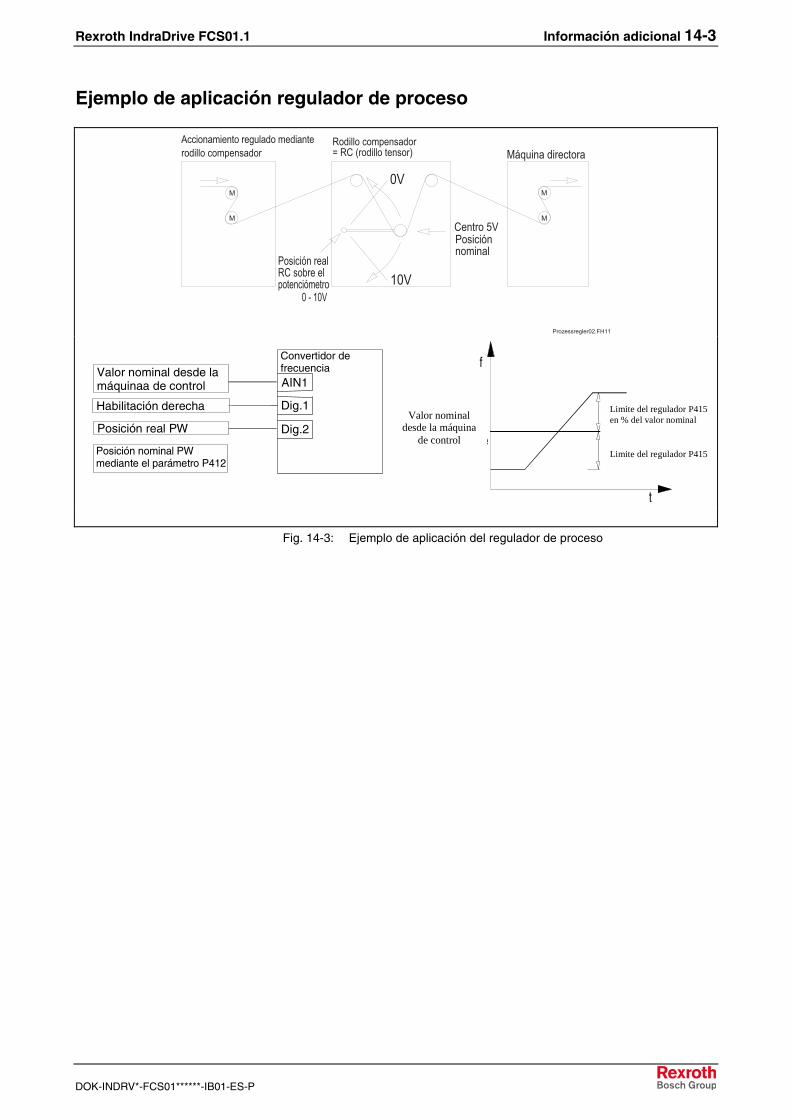
Rexroth IndraDrive FCS01.1 Información adicional 14-3
DOK-INDRV*-FCS01******-IB01-ES-P
Ejemplo de aplicación regulador de proceso
.3.0
'
4$ 5 .
.(3".#
4
4
4
4
'
'
3&'.
f
t
Reglergrenze P415in % vom Sollwert
Reglergrenze P415
Sollwert vonLeitmaschine
Dig.1
Posición nominal PW mediante el parámetro P412
Valor nominal desde la máquinaa de control
Posición real PW
AIN1
Dig.2
Convertidor de frecuencia
Habilitación derecha Valor nominal
desde la máquina de control
Limite del regulador P415 en % del valor nominal
Limite del regulador P415
Fig. 14-3: Ejemplo de aplicación del regulador de proceso
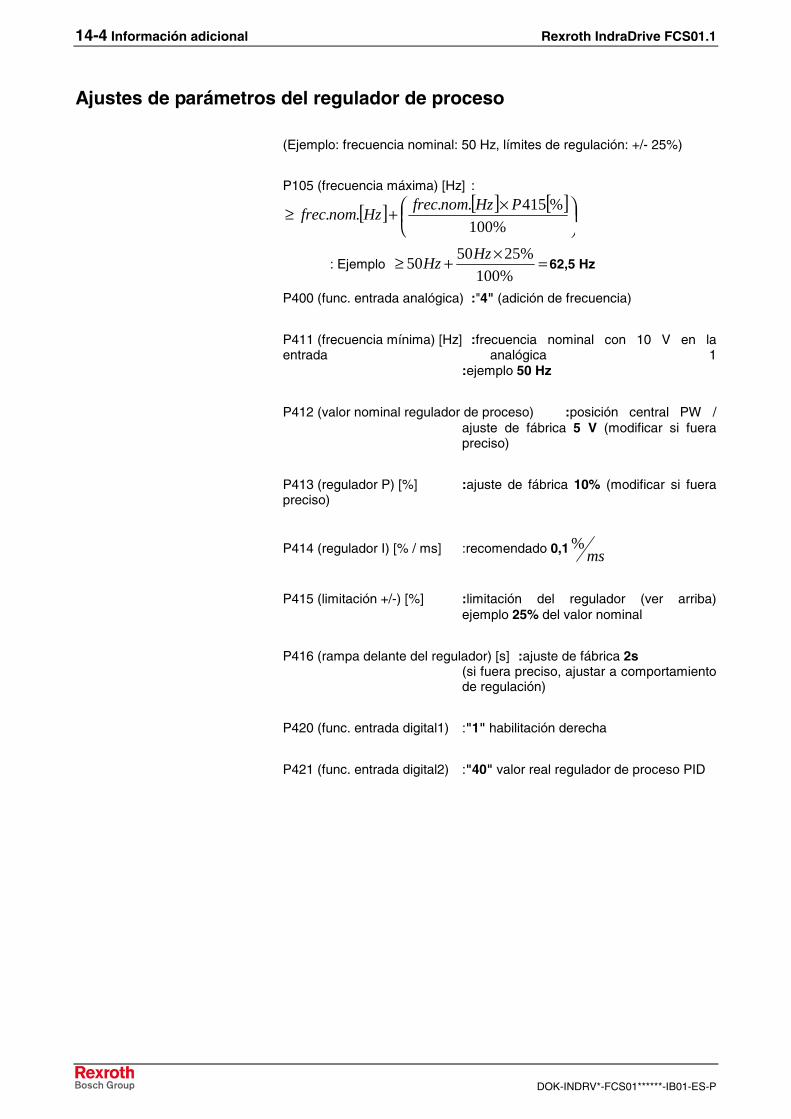
14-4 Información adicional Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Ajustes de parámetros del regulador de proceso
(Ejemplo: frecuencia nominal: 50 Hz, límites de regulación: +/- 25%)
P105 (frecuencia máxima) [Hz] :
[ ] [ ] [ ]
×+≥
%100
%415....
PHznomfrecHznomfrec
: Ejemplo =×+≥%100
%255050
HzHz 62,5 Hz
P400 (func. entrada analógica) :"4" (adición de frecuencia)
P411 (frecuencia mínima) [Hz] :frecuencia nominal con 10 V en la entrada analógica 1 :ejemplo 50 Hz
P412 (valor nominal regulador de proceso) :posición central PW / ajuste de fábrica 5 V (modificar si fuera preciso)
P413 (regulador P) [%] :ajuste de fábrica 10% (modificar si fuera preciso)
P414 (regulador I) [% / ms] :recomendado 0,1 ms%
P415 (limitación +/-) [%] :limitación del regulador (ver arriba) ejemplo 25% del valor nominal
P416 (rampa delante del regulador) [s] :ajuste de fábrica 2s (si fuera preciso, ajustar a comportamiento de regulación)
P420 (func. entrada digital1) :"1" habilitación derecha
P421 (func. entrada digital2) :"40" valor real regulador de proceso PID
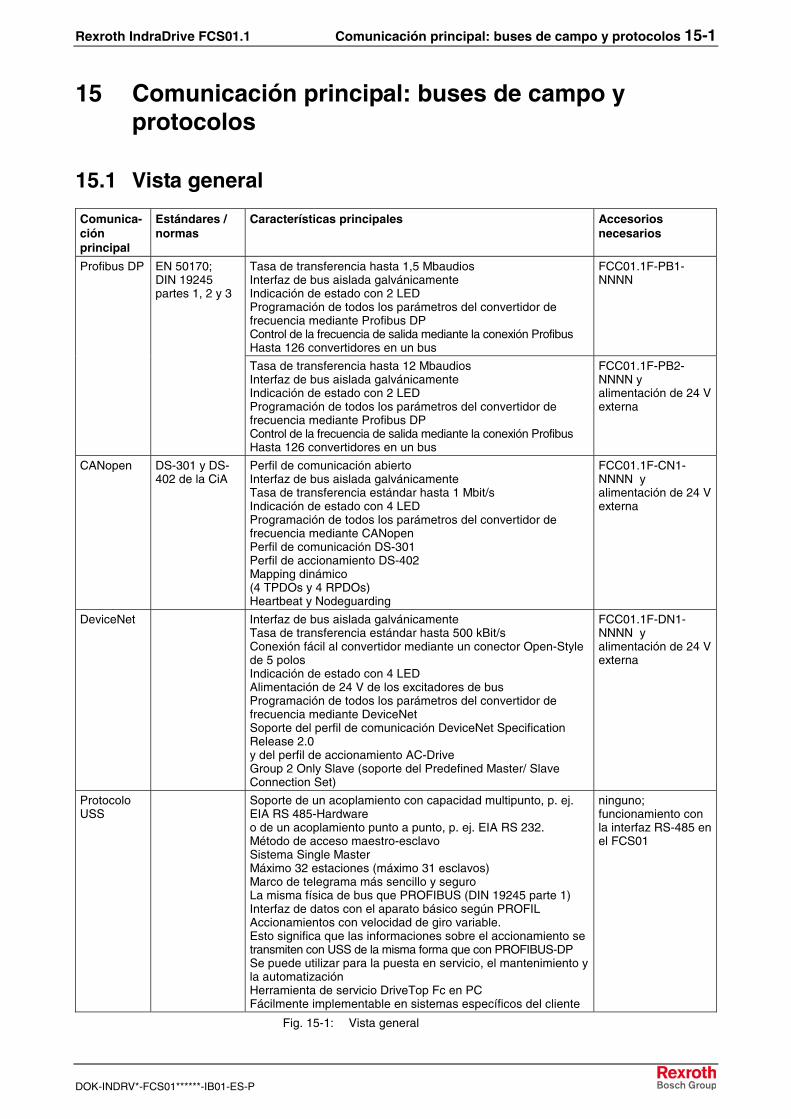
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-1
DOK-INDRV*-FCS01******-IB01-ES-P
15 Comunicación principal: buses de campo y protocolos
15.1 Vista general
Comunica-ción principal
Estándares / normas
Características principales Accesorios necesarios
Tasa de transferencia hasta 1,5 Mbaudios Interfaz de bus aislada galvánicamente Indicación de estado con 2 LED Programación de todos los parámetros del convertidor de frecuencia mediante Profibus DP Control de la frecuencia de salida mediante la conexión Profibus Hasta 126 convertidores en un bus
FCC01.1F-PB1-NNNN
Profibus DP EN 50170; DIN 19245 partes 1, 2 y 3
Tasa de transferencia hasta 12 Mbaudios Interfaz de bus aislada galvánicamente Indicación de estado con 2 LED Programación de todos los parámetros del convertidor de frecuencia mediante Profibus DP Control de la frecuencia de salida mediante la conexión Profibus Hasta 126 convertidores en un bus
FCC01.1F-PB2-NNNN y alimentación de 24 V externa
CANopen DS-301 y DS-402 de la CiA
Perfil de comunicación abierto Interfaz de bus aislada galvánicamente Tasa de transferencia estándar hasta 1 Mbit/s Indicación de estado con 4 LED Programación de todos los parámetros del convertidor de frecuencia mediante CANopen Perfil de comunicación DS-301 Perfil de accionamiento DS-402 Mapping dinámico (4 TPDOs y 4 RPDOs) Heartbeat y Nodeguarding
FCC01.1F-CN1-NNNN y alimentación de 24 V externa
DeviceNet Interfaz de bus aislada galvánicamente Tasa de transferencia estándar hasta 500 kBit/s Conexión fácil al convertidor mediante un conector Open-Style de 5 polos Indicación de estado con 4 LED Alimentación de 24 V de los excitadores de bus Programación de todos los parámetros del convertidor de frecuencia mediante DeviceNet Soporte del perfil de comunicación DeviceNet Specification Release 2.0 y del perfil de accionamiento AC-Drive Group 2 Only Slave (soporte del Predefined Master/ Slave Connection Set)
FCC01.1F-DN1-NNNN y alimentación de 24 V externa
Protocolo USS
Soporte de un acoplamiento con capacidad multipunto, p. ej. EIA RS 485-Hardware o de un acoplamiento punto a punto, p. ej. EIA RS 232. Método de acceso maestro-esclavo Sistema Single Master Máximo 32 estaciones (máximo 31 esclavos) Marco de telegrama más sencillo y seguro La misma física de bus que PROFIBUS (DIN 19245 parte 1) Interfaz de datos con el aparato básico según PROFIL Accionamientos con velocidad de giro variable. Esto significa que las informaciones sobre el accionamiento se transmiten con USS de la misma forma que con PROFIBUS-DP Se puede utilizar para la puesta en servicio, el mantenimiento y la automatización Herramienta de servicio DriveTop Fc en PC Fácilmente implementable en sistemas específicos del cliente
ninguno; funcionamiento con la interfaz RS-485 en el FCS01
Fig. 15-1: Vista general
15-2 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Archivos de configuración Los archivos de configuración necesarios:
para Profibus el archivo maestro del dispositivo (*.gsd) y para DeviceNet y CanOpen la Electronic Data Sheet (*.eds), que encontrará en www.boschrexroth.com/indradrive.
Abreviaturas utilizadas PKW: valor de identificación de parámetro
PZD: datos de proceso
PPO: objeto de parámetros-datos de proceso
PKE: identificación de parámetro
IND: índice
PWE: valor de parámetro
STW: palabra de mando
ZSW: palabra de estado
SW: valor nominal
IW: valor real
PNU: números de parámetro
AK: identificación de orden o identificación de respuesta
SPM: mensaje espontáneo
15.2 Profibus DP
Uso y aplicación Mediante Profibus, un gran número de los aparatos de automatización más diversos pueden intercambiar datos. Permite a PLC, PC, aparatos de manejo y de observación comunicarse a través de un bus uniforme en modo de bit en serie. La variante de Profibus PROFIBUS DP, de velocidad optimizada, se utiliza preferentemente en el ámbito de la comunicación de sensores y actuadores, en el que son necesarias reacciones del sistema rápidas. PROFIBUS DP está indicado como sustituto de la costosa transmisión de señales paralela con 24 V y la transmisión de valores de medición.
Protocolo Profibus A continuación se describe el protocolo en base al modelo de referencia OSI 7 capas.
Capa de transferencia En la capa 2 del modelo ISO/OSI se describen, entre otras cosas:.
• el formato general de los telegramas para la transferencia de datos
• los mecanismos de acceso al bus
• los mecanismos de seguridad
• los tiempos a respetar
• los servicios de transferencia posibles.
El usuario sólo puede ejercer una influencia reducida en la capa 2, dado que casi todos los servicios están contenidos en los PROFIBUS- ASICs disponibles.
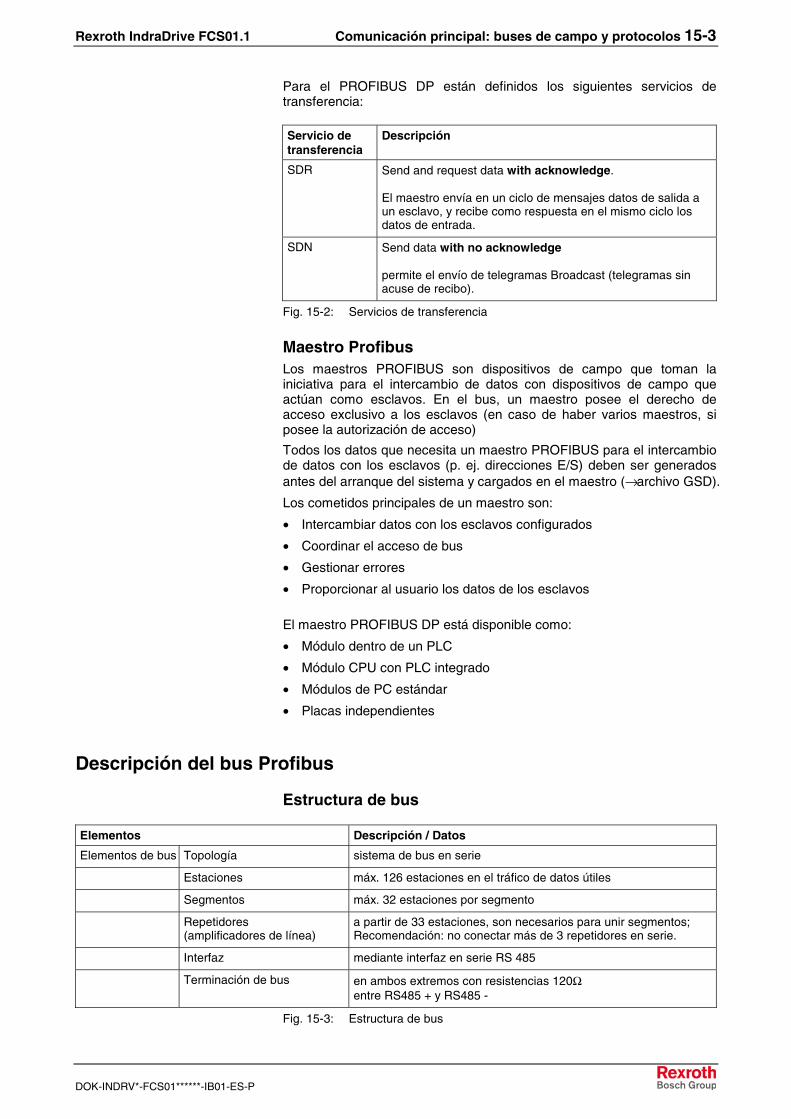
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-3
DOK-INDRV*-FCS01******-IB01-ES-P
Para el PROFIBUS DP están definidos los siguientes servicios de transferencia:
Servicio de transferencia
Descripción
SDR Send and request data with acknowledge. El maestro envía en un ciclo de mensajes datos de salida a un esclavo, y recibe como respuesta en el mismo ciclo los datos de entrada.
SDN Send data with no acknowledge permite el envío de telegramas Broadcast (telegramas sin acuse de recibo).
Fig. 15-2: Servicios de transferencia
Maestro Profibus Los maestros PROFIBUS son dispositivos de campo que toman la iniciativa para el intercambio de datos con dispositivos de campo que actúan como esclavos. En el bus, un maestro posee el derecho de acceso exclusivo a los esclavos (en caso de haber varios maestros, si posee la autorización de acceso)
Todos los datos que necesita un maestro PROFIBUS para el intercambio de datos con los esclavos (p. ej. direcciones E/S) deben ser generados antes del arranque del sistema y cargados en el maestro (→ archivo GSD).
Los cometidos principales de un maestro son:
• Intercambiar datos con los esclavos configurados
• Coordinar el acceso de bus
• Gestionar errores
• Proporcionar al usuario los datos de los esclavos
El maestro PROFIBUS DP está disponible como:
• Módulo dentro de un PLC
• Módulo CPU con PLC integrado
• Módulos de PC estándar
• Placas independientes
Descripción del bus Profibus
Estructura de bus
Elementos Descripción / Datos
Elementos de bus Topología sistema de bus en serie
Estaciones máx. 126 estaciones en el tráfico de datos útiles
Segmentos máx. 32 estaciones por segmento
Repetidores (amplificadores de línea)
a partir de 33 estaciones, son necesarios para unir segmentos; Recomendación: no conectar más de 3 repetidores en serie.
Interfaz mediante interfaz en serie RS 485
Terminación de bus en ambos extremos con resistencias 120Ω entre RS485 + y RS485 -
Fig. 15-3: Estructura de bus
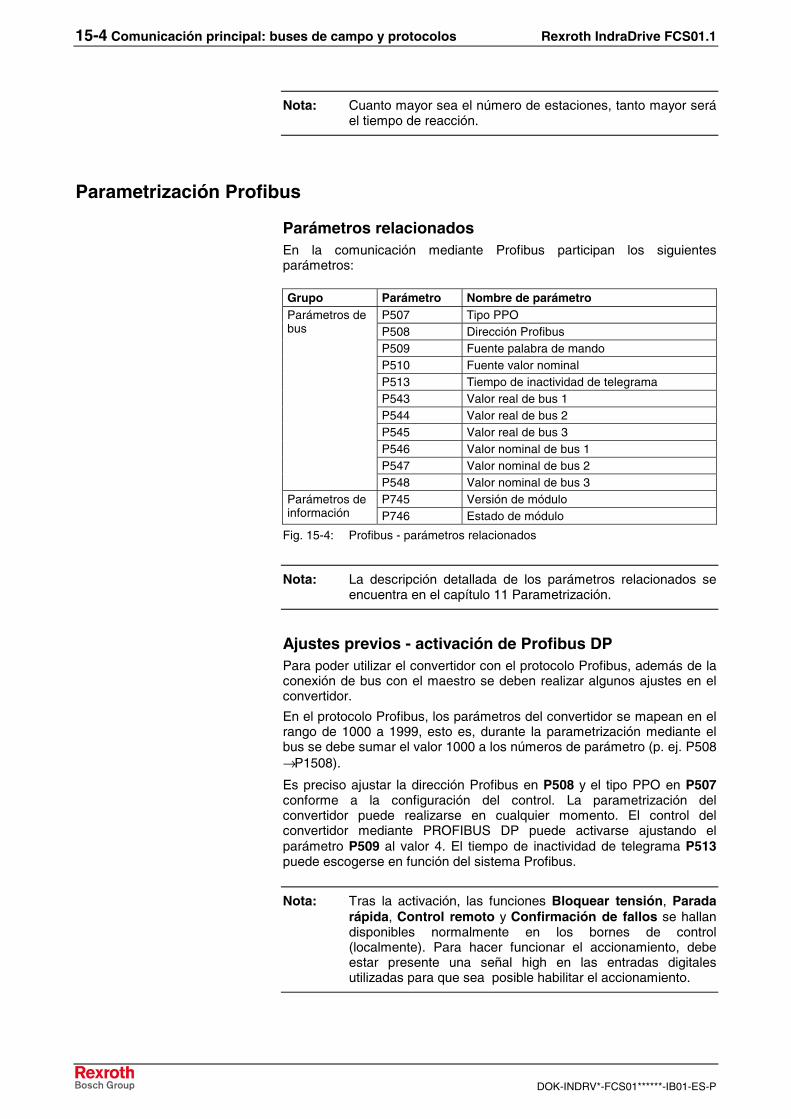
15-4 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Nota: Cuanto mayor sea el número de estaciones, tanto mayor será el tiempo de reacción.
Parametrización Profibus
Parámetros relacionados En la comunicación mediante Profibus participan los siguientes parámetros:
Grupo Parámetro Nombre de parámetro P507 Tipo PPO P508 Dirección Profibus P509 Fuente palabra de mando P510 Fuente valor nominal P513 Tiempo de inactividad de telegrama P543 Valor real de bus 1 P544 Valor real de bus 2 P545 Valor real de bus 3 P546 Valor nominal de bus 1 P547 Valor nominal de bus 2
Parámetros de bus
P548 Valor nominal de bus 3 P745 Versión de módulo Parámetros de
información P746 Estado de módulo
Fig. 15-4: Profibus - parámetros relacionados
Nota: La descripción detallada de los parámetros relacionados se encuentra en el capítulo 11 Parametrización.
Ajustes previos - activación de Profibus DP Para poder utilizar el convertidor con el protocolo Profibus, además de la conexión de bus con el maestro se deben realizar algunos ajustes en el convertidor.
En el protocolo Profibus, los parámetros del convertidor se mapean en el rango de 1000 a 1999, esto es, durante la parametrización mediante el bus se debe sumar el valor 1000 a los números de parámetro (p. ej. P508 → P1508).
Es preciso ajustar la dirección Profibus en P508 y el tipo PPO en P507 conforme a la configuración del control. La parametrización del convertidor puede realizarse en cualquier momento. El control del convertidor mediante PROFIBUS DP puede activarse ajustando el parámetro P509 al valor 4. El tiempo de inactividad de telegrama P513 puede escogerse en función del sistema Profibus.
Nota: Tras la activación, las funciones Bloquear tensión, Parada rápida, Control remoto y Confirmación de fallos se hallan disponibles normalmente en los bornes de control (localmente). Para hacer funcionar el accionamiento, debe estar presente una señal high en las entradas digitales utilizadas para que sea posible habilitar el accionamiento.
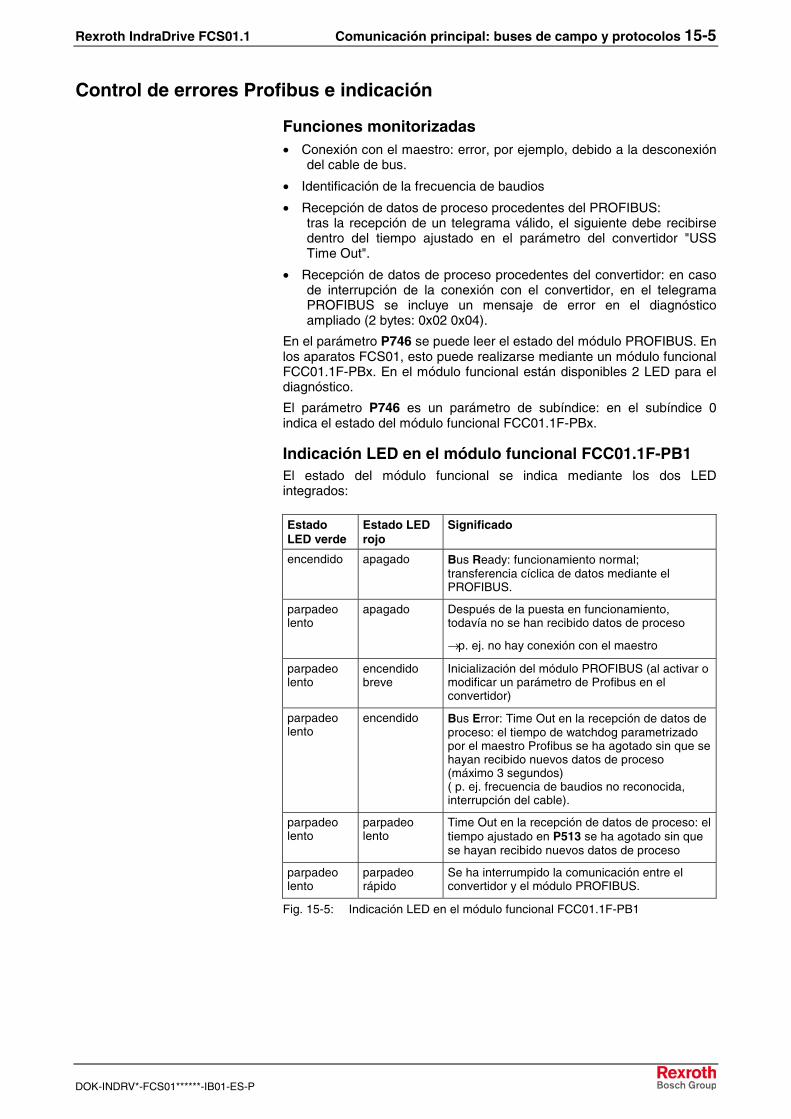
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-5
DOK-INDRV*-FCS01******-IB01-ES-P
Control de errores Profibus e indicación
Funciones monitorizadas • Conexión con el maestro: error, por ejemplo, debido a la desconexión
del cable de bus.
• Identificación de la frecuencia de baudios
• Recepción de datos de proceso procedentes del PROFIBUS: tras la recepción de un telegrama válido, el siguiente debe recibirse dentro del tiempo ajustado en el parámetro del convertidor "USS Time Out".
• Recepción de datos de proceso procedentes del convertidor: en caso de interrupción de la conexión con el convertidor, en el telegrama PROFIBUS se incluye un mensaje de error en el diagnóstico ampliado (2 bytes: 0x02 0x04).
En el parámetro P746 se puede leer el estado del módulo PROFIBUS. En los aparatos FCS01, esto puede realizarse mediante un módulo funcional FCC01.1F-PBx. En el módulo funcional están disponibles 2 LED para el diagnóstico.
El parámetro P746 es un parámetro de subíndice: en el subíndice 0 indica el estado del módulo funcional FCC01.1F-PBx.
Indicación LED en el módulo funcional FCC01.1F-PB1 El estado del módulo funcional se indica mediante los dos LED integrados:
Estado LED verde
Estado LED rojo
Significado
encendido apagado Bus Ready: funcionamiento normal; transferencia cíclica de datos mediante el PROFIBUS.
parpadeo lento
apagado Después de la puesta en funcionamiento, todavía no se han recibido datos de proceso
→ p. ej. no hay conexión con el maestro
parpadeo lento
encendido breve
Inicialización del módulo PROFIBUS (al activar o modificar un parámetro de Profibus en el convertidor)
parpadeo lento
encendido Bus Error: Time Out en la recepción de datos de proceso: el tiempo de watchdog parametrizado por el maestro Profibus se ha agotado sin que se hayan recibido nuevos datos de proceso (máximo 3 segundos) ( p. ej. frecuencia de baudios no reconocida, interrupción del cable).
parpadeo lento
parpadeo lento
Time Out en la recepción de datos de proceso: el tiempo ajustado en P513 se ha agotado sin que se hayan recibido nuevos datos de proceso
parpadeo lento
parpadeo rápido
Se ha interrumpido la comunicación entre el convertidor y el módulo PROFIBUS.
Fig. 15-5: Indicación LED en el módulo funcional FCC01.1F-PB1
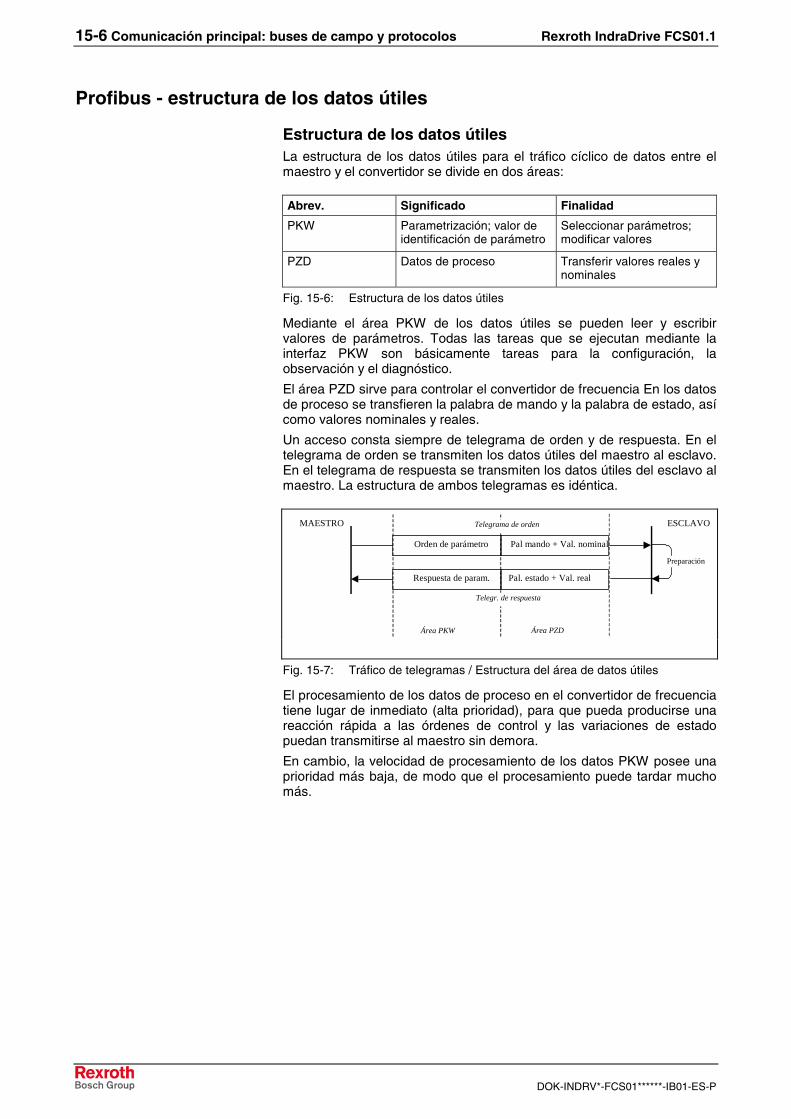
15-6 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Profibus - estructura de los datos útiles
Estructura de los datos útiles La estructura de los datos útiles para el tráfico cíclico de datos entre el maestro y el convertidor se divide en dos áreas:
Abrev. Significado Finalidad
PKW Parametrización; valor de identificación de parámetro
Seleccionar parámetros; modificar valores
PZD Datos de proceso Transferir valores reales y nominales
Fig. 15-6: Estructura de los datos útiles
Mediante el área PKW de los datos útiles se pueden leer y escribir valores de parámetros. Todas las tareas que se ejecutan mediante la interfaz PKW son básicamente tareas para la configuración, la observación y el diagnóstico.
El área PZD sirve para controlar el convertidor de frecuencia En los datos de proceso se transfieren la palabra de mando y la palabra de estado, así como valores nominales y reales.
Un acceso consta siempre de telegrama de orden y de respuesta. En el telegrama de orden se transmiten los datos útiles del maestro al esclavo. En el telegrama de respuesta se transmiten los datos útiles del esclavo al maestro. La estructura de ambos telegramas es idéntica.
MAESTRO ESCLAVO Orden de parámetro Pal mando + Val. nominal
Respuesta de param. Pal. estado + Val. real
Área PKW Área PZD
Telegrama de orden
Telegr. de respuesta
Preparación
Fig. 15-7: Tráfico de telegramas / Estructura del área de datos útiles
El procesamiento de los datos de proceso en el convertidor de frecuencia tiene lugar de inmediato (alta prioridad), para que pueda producirse una reacción rápida a las órdenes de control y las variaciones de estado puedan transmitirse al maestro sin demora.
En cambio, la velocidad de procesamiento de los datos PKW posee una prioridad más baja, de modo que el procesamiento puede tardar mucho más.
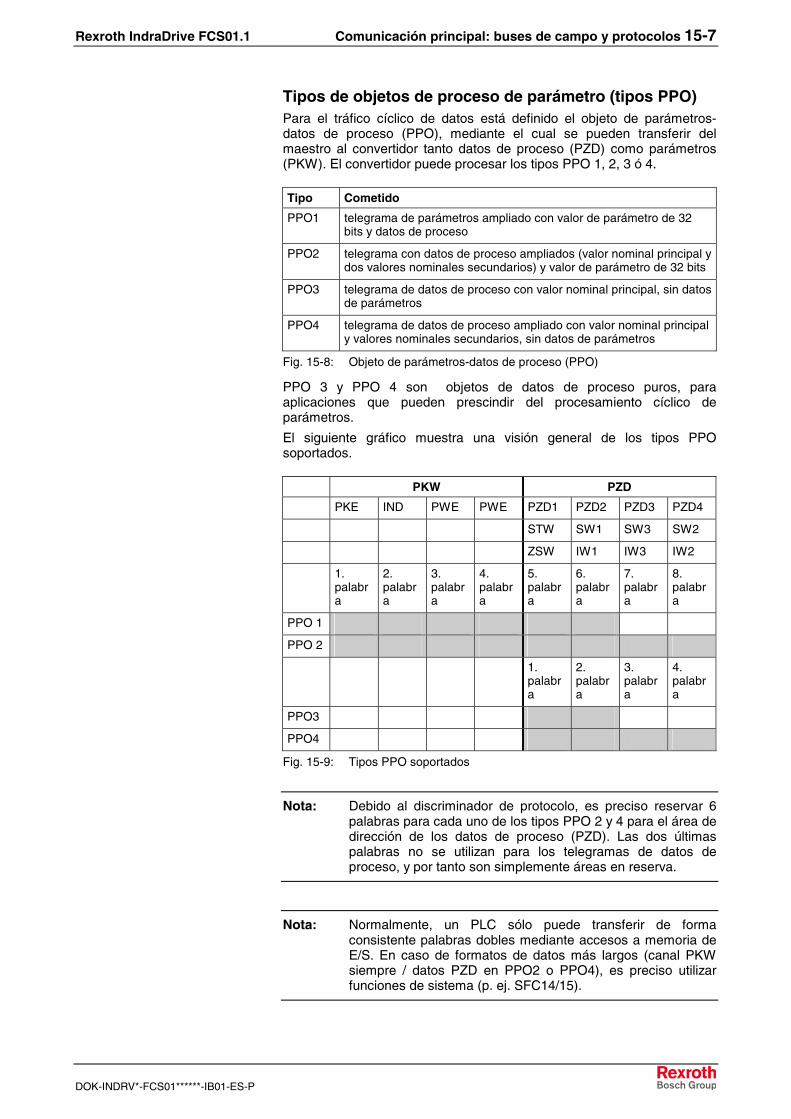
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-7
DOK-INDRV*-FCS01******-IB01-ES-P
Tipos de objetos de proceso de parámetro (tipos PPO) Para el tráfico cíclico de datos está definido el objeto de parámetros-datos de proceso (PPO), mediante el cual se pueden transferir del maestro al convertidor tanto datos de proceso (PZD) como parámetros (PKW). El convertidor puede procesar los tipos PPO 1, 2, 3 ó 4.
Tipo Cometido
PPO1 telegrama de parámetros ampliado con valor de parámetro de 32 bits y datos de proceso
PPO2 telegrama con datos de proceso ampliados (valor nominal principal y dos valores nominales secundarios) y valor de parámetro de 32 bits
PPO3 telegrama de datos de proceso con valor nominal principal, sin datos de parámetros
PPO4 telegrama de datos de proceso ampliado con valor nominal principal y valores nominales secundarios, sin datos de parámetros
Fig. 15-8: Objeto de parámetros-datos de proceso (PPO)
PPO 3 y PPO 4 son objetos de datos de proceso puros, para aplicaciones que pueden prescindir del procesamiento cíclico de parámetros.
El siguiente gráfico muestra una visión general de los tipos PPO soportados.
PKW PZD
PKE IND PWE PWE PZD1 PZD2 PZD3 PZD4
STW SW1 SW3 SW2
ZSW IW1 IW3 IW2
1. palabra
2. palabra
3. palabra
4. palabra
5. palabra
6. palabra
7. palabra
8. palabra
PPO 1
PPO 2
1. palabra
2. palabra
3. palabra
4. palabra
PPO3
PPO4
Fig. 15-9: Tipos PPO soportados
Nota: Debido al discriminador de protocolo, es preciso reservar 6 palabras para cada uno de los tipos PPO 2 y 4 para el área de dirección de los datos de proceso (PZD). Las dos últimas palabras no se utilizan para los telegramas de datos de proceso, y por tanto son simplemente áreas en reserva.
Nota: Normalmente, un PLC sólo puede transferir de forma consistente palabras dobles mediante accesos a memoria de E/S. En caso de formatos de datos más largos (canal PKW siempre / datos PZD en PPO2 o PPO4), es preciso utilizar funciones de sistema (p. ej. SFC14/15).
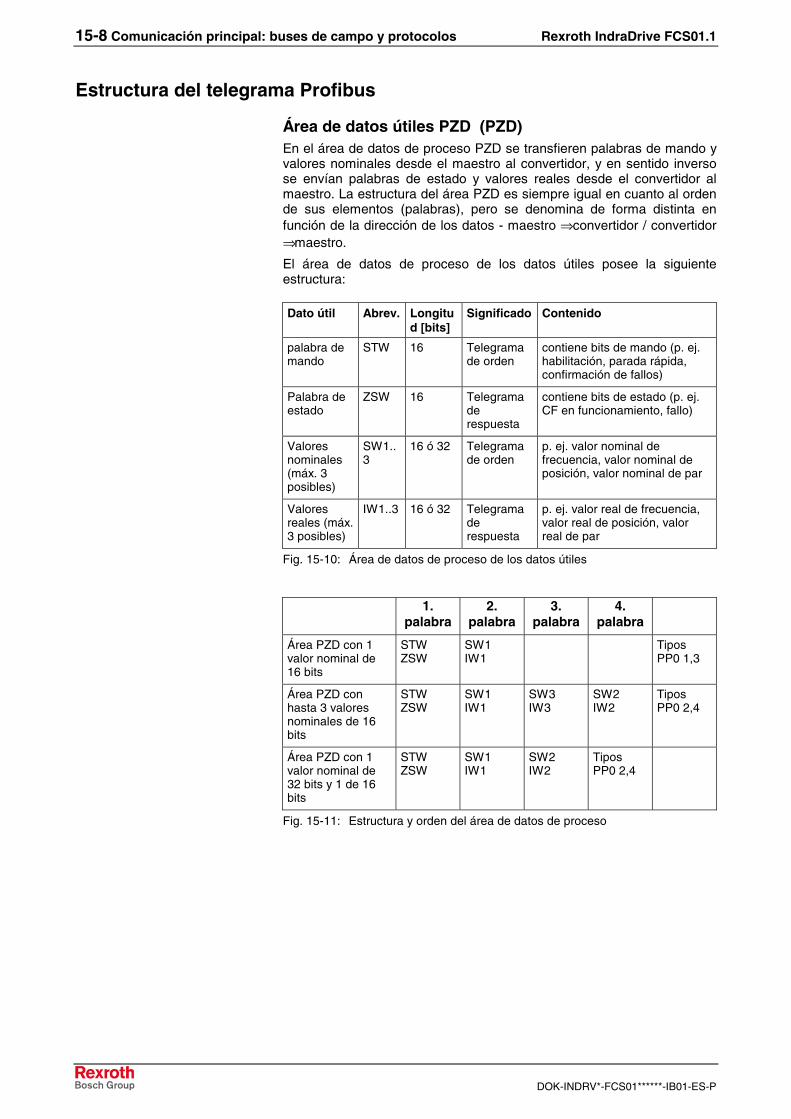
15-8 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Estructura del telegrama Profibus
Área de datos útiles PZD (PZD) En el área de datos de proceso PZD se transfieren palabras de mando y valores nominales desde el maestro al convertidor, y en sentido inverso se envían palabras de estado y valores reales desde el convertidor al maestro. La estructura del área PZD es siempre igual en cuanto al orden de sus elementos (palabras), pero se denomina de forma distinta en función de la dirección de los datos - maestro ⇒ convertidor / convertidor ⇒ maestro.
El área de datos de proceso de los datos útiles posee la siguiente estructura:
Dato útil Abrev. Longitud [bits]
Significado Contenido
palabra de mando
STW 16 Telegrama de orden
contiene bits de mando (p. ej. habilitación, parada rápida, confirmación de fallos)
Palabra de estado
ZSW 16 Telegrama de respuesta
contiene bits de estado (p. ej. CF en funcionamiento, fallo)
Valores nominales (máx. 3 posibles)
SW1..3
16 ó 32 Telegrama de orden
p. ej. valor nominal de frecuencia, valor nominal de posición, valor nominal de par
Valores reales (máx. 3 posibles)
IW1..3 16 ó 32 Telegrama de respuesta
p. ej. valor real de frecuencia, valor real de posición, valor real de par
Fig. 15-10: Área de datos de proceso de los datos útiles
1. palabra
2. palabra
3. palabra
4. palabra
Área PZD con 1 valor nominal de 16 bits
STW ZSW
SW1 IW1
Tipos PP0 1,3
Área PZD con hasta 3 valores nominales de 16 bits
STW ZSW
SW1 IW1
SW3 IW3
SW2 IW2
Tipos PP0 2,4
Área PZD con 1 valor nominal de 32 bits y 1 de 16 bits
STW ZSW
SW1 IW1
SW2 IW2
Tipos PP0 2,4
Fig. 15-11: Estructura y orden del área de datos de proceso
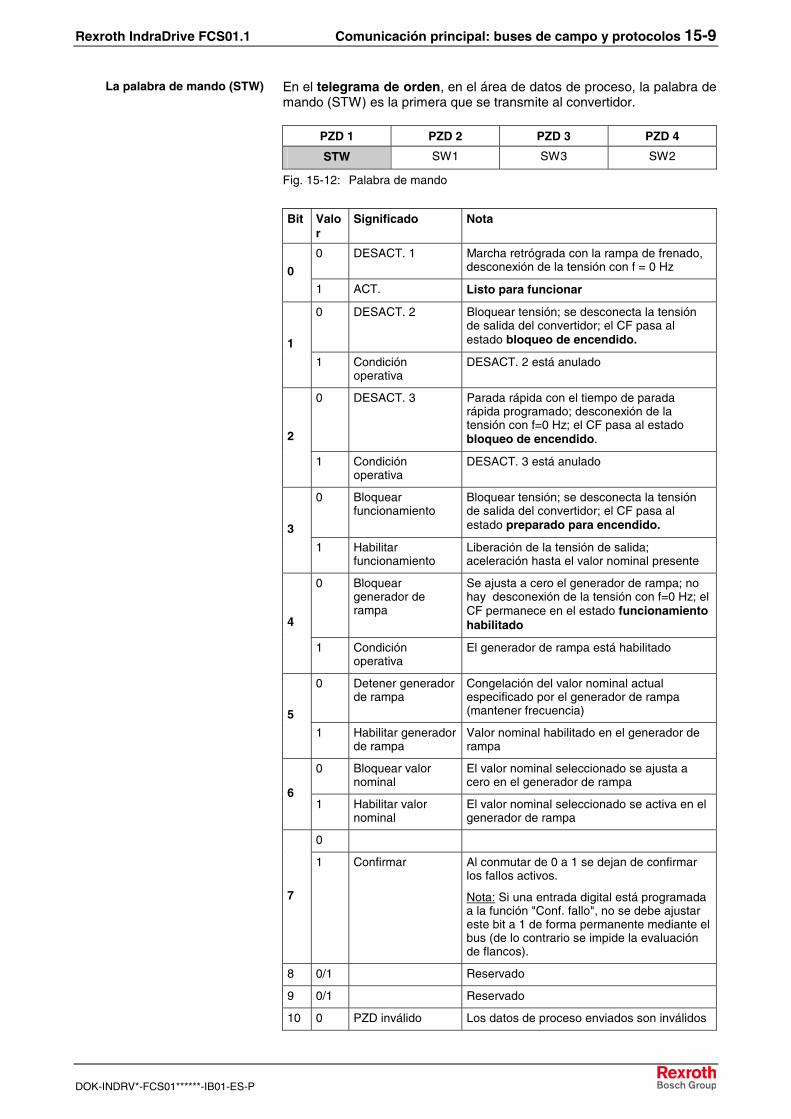
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-9
DOK-INDRV*-FCS01******-IB01-ES-P
En el telegrama de orden, en el área de datos de proceso, la palabra de mando (STW) es la primera que se transmite al convertidor.
PZD 1 PZD 2 PZD 3 PZD 4
STW SW1 SW3 SW2
Fig. 15-12: Palabra de mando
Bit Valor
Significado Nota
0 DESACT. 1 Marcha retrógrada con la rampa de frenado, desconexión de la tensión con f = 0 Hz 0
1 ACT. Listo para funcionar
0 DESACT. 2 Bloquear tensión; se desconecta la tensión de salida del convertidor; el CF pasa al estado bloqueo de encendido. 1
1 Condición operativa
DESACT. 2 está anulado
0 DESACT. 3 Parada rápida con el tiempo de parada rápida programado; desconexión de la tensión con f=0 Hz; el CF pasa al estado bloqueo de encendido. 2
1 Condición operativa
DESACT. 3 está anulado
0 Bloquear funcionamiento
Bloquear tensión; se desconecta la tensión de salida del convertidor; el CF pasa al estado preparado para encendido. 3
1 Habilitar funcionamiento
Liberación de la tensión de salida; aceleración hasta el valor nominal presente
0 Bloquear generador de rampa
Se ajusta a cero el generador de rampa; no hay desconexión de la tensión con f=0 Hz; el CF permanece en el estado funcionamiento habilitado 4
1 Condición operativa
El generador de rampa está habilitado
0 Detener generador de rampa
Congelación del valor nominal actual especificado por el generador de rampa (mantener frecuencia) 5
1 Habilitar generador de rampa
Valor nominal habilitado en el generador de rampa
0 Bloquear valor nominal
El valor nominal seleccionado se ajusta a cero en el generador de rampa
6 1 Habilitar valor
nominal El valor nominal seleccionado se activa en el generador de rampa
0
7
1 Confirmar Al conmutar de 0 a 1 se dejan de confirmar los fallos activos.
Nota: Si una entrada digital está programada a la función "Conf. fallo", no se debe ajustar este bit a 1 de forma permanente mediante el bus (de lo contrario se impide la evaluación de flancos).
8 0/1 Reservado
9 0/1 Reservado
10 0 PZD inválido Los datos de proceso enviados son inválidos
La palabra de mando (STW)
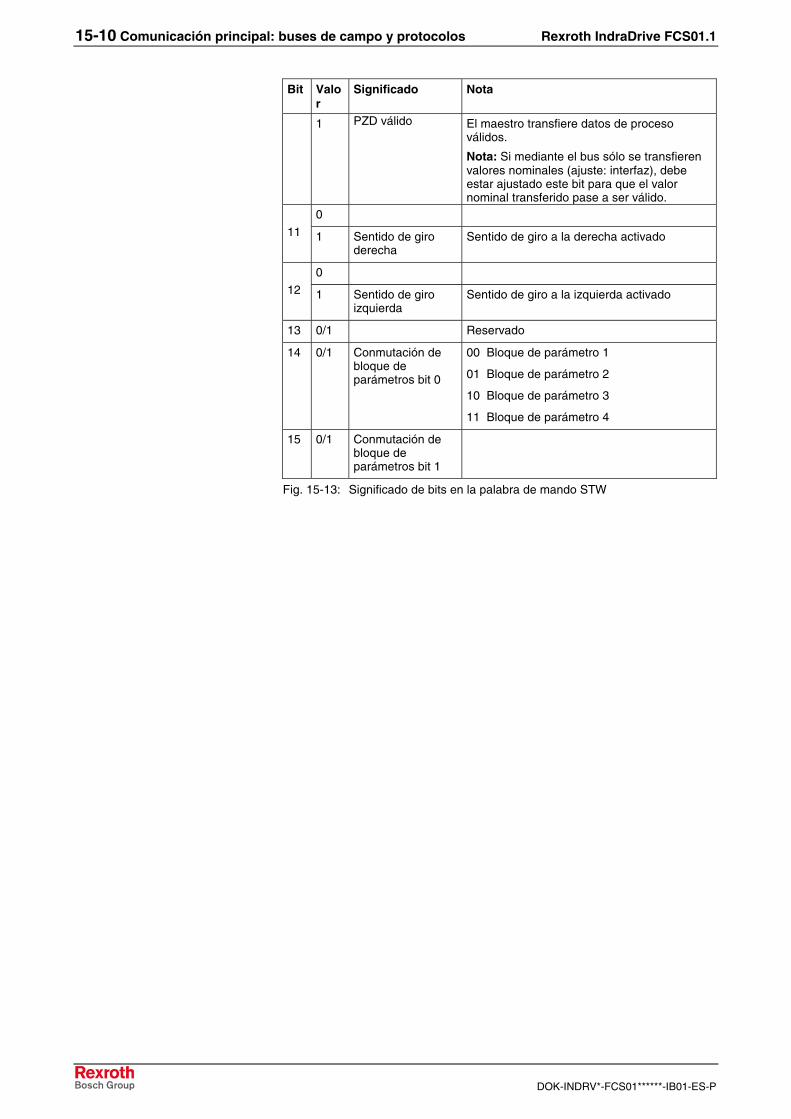
15-10 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Bit Valor
Significado Nota
1 PZD válido El maestro transfiere datos de proceso válidos.
Nota: Si mediante el bus sólo se transfieren valores nominales (ajuste: interfaz), debe estar ajustado este bit para que el valor nominal transferido pase a ser válido.
0
11 1 Sentido de giro derecha
Sentido de giro a la derecha activado
0
12 1 Sentido de giro izquierda
Sentido de giro a la izquierda activado
13 0/1 Reservado
14 0/1 Conmutación de bloque de parámetros bit 0
00 Bloque de parámetro 1
01 Bloque de parámetro 2
10 Bloque de parámetro 3
11 Bloque de parámetro 4
15 0/1 Conmutación de bloque de parámetros bit 1
Fig. 15-13: Significado de bits en la palabra de mando STW
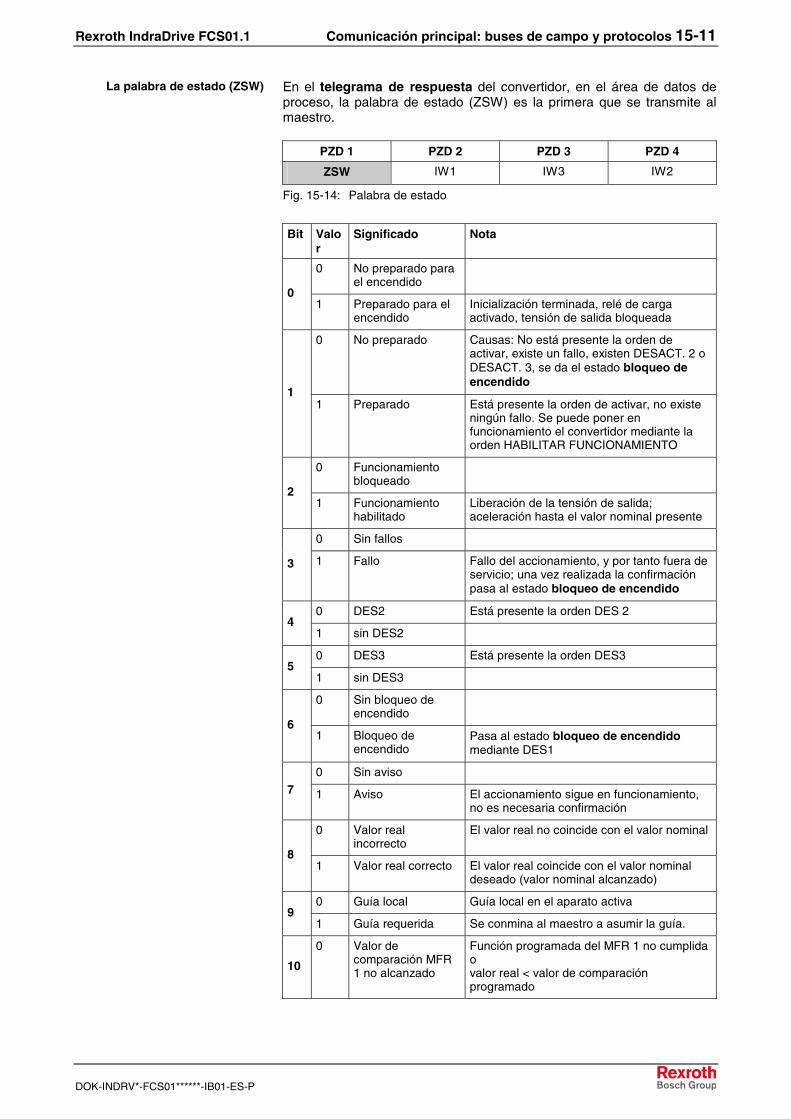
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-11
DOK-INDRV*-FCS01******-IB01-ES-P
En el telegrama de respuesta del convertidor, en el área de datos de proceso, la palabra de estado (ZSW) es la primera que se transmite al maestro.
PZD 1 PZD 2 PZD 3 PZD 4
ZSW IW1 IW3 IW2
Fig. 15-14: Palabra de estado
Bit Valor
Significado Nota
0 No preparado para el encendido
0 1 Preparado para el
encendido Inicialización terminada, relé de carga activado, tensión de salida bloqueada
0 No preparado Causas: No está presente la orden de activar, existe un fallo, existen DESACT. 2 o DESACT. 3, se da el estado bloqueo de encendido
1 1 Preparado Está presente la orden de activar, no existe
ningún fallo. Se puede poner en funcionamiento el convertidor mediante la orden HABILITAR FUNCIONAMIENTO
0 Funcionamiento bloqueado
2 1 Funcionamiento
habilitado Liberación de la tensión de salida; aceleración hasta el valor nominal presente
0 Sin fallos
3 1 Fallo Fallo del accionamiento, y por tanto fuera de servicio; una vez realizada la confirmación pasa al estado bloqueo de encendido
0 DES2 Está presente la orden DES 2 4
1 sin DES2
0 DES3 Está presente la orden DES3 5
1 sin DES3
0 Sin bloqueo de encendido
6 1 Bloqueo de
encendido Pasa al estado bloqueo de encendido mediante DES1
0 Sin aviso
7 1 Aviso El accionamiento sigue en funcionamiento, no es necesaria confirmación
0 Valor real incorrecto
El valor real no coincide con el valor nominal
8 1 Valor real correcto El valor real coincide con el valor nominal
deseado (valor nominal alcanzado)
0 Guía local Guía local en el aparato activa 9
1 Guía requerida Se conmina al maestro a asumir la guía.
10
0 Valor de comparación MFR 1 no alcanzado
Función programada del MFR 1 no cumplida o valor real < valor de comparación programado
La palabra de estado (ZSW)
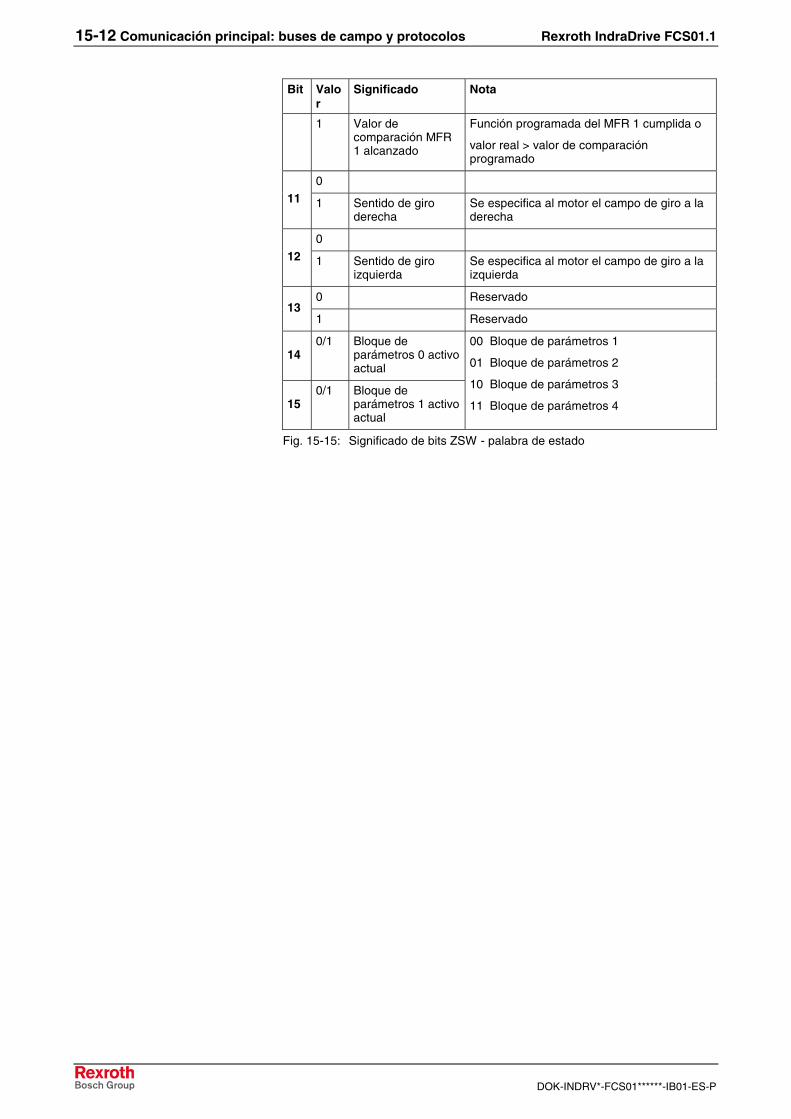
15-12 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Bit Valor
Significado Nota
1 Valor de comparación MFR 1 alcanzado
Función programada del MFR 1 cumplida o
valor real > valor de comparación programado
0
11 1 Sentido de giro derecha
Se especifica al motor el campo de giro a la derecha
0
12 1 Sentido de giro izquierda
Se especifica al motor el campo de giro a la izquierda
0 Reservado 13
1 Reservado
14 0/1 Bloque de
parámetros 0 activo actual
15 0/1 Bloque de
parámetros 1 activo actual
00 Bloque de parámetros 1
01 Bloque de parámetros 2
10 Bloque de parámetros 3
11 Bloque de parámetros 4
Fig. 15-15: Significado de bits ZSW - palabra de estado
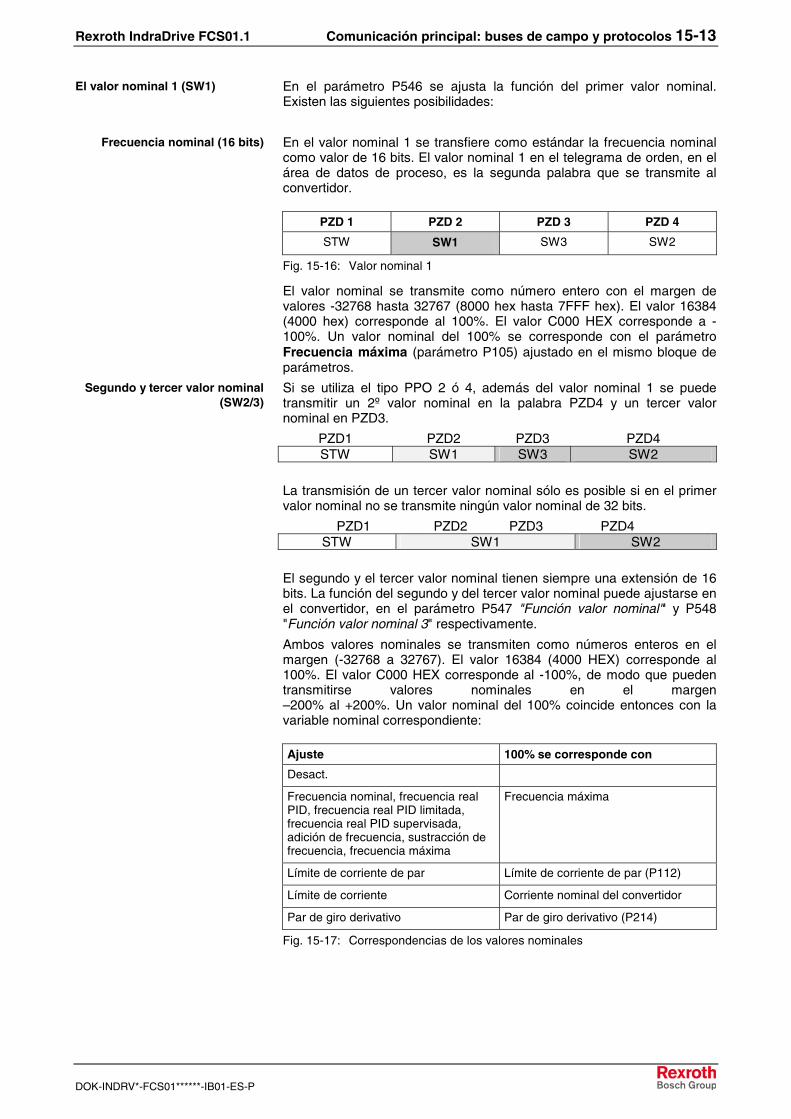
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-13
DOK-INDRV*-FCS01******-IB01-ES-P
En el parámetro P546 se ajusta la función del primer valor nominal. Existen las siguientes posibilidades:
En el valor nominal 1 se transfiere como estándar la frecuencia nominal como valor de 16 bits. El valor nominal 1 en el telegrama de orden, en el área de datos de proceso, es la segunda palabra que se transmite al convertidor.
PZD 1 PZD 2 PZD 3 PZD 4
STW SW1 SW3 SW2
Fig. 15-16: Valor nominal 1
El valor nominal se transmite como número entero con el margen de valores -32768 hasta 32767 (8000 hex hasta 7FFF hex). El valor 16384 (4000 hex) corresponde al 100%. El valor C000 HEX corresponde a -100%. Un valor nominal del 100% se corresponde con el parámetro Frecuencia máxima (parámetro P105) ajustado en el mismo bloque de parámetros.
Si se utiliza el tipo PPO 2 ó 4, además del valor nominal 1 se puede transmitir un 2º valor nominal en la palabra PZD4 y un tercer valor nominal en PZD3.
PZD1 PZD2 PZD3 PZD4 STW SW1 SW3 SW2
La transmisión de un tercer valor nominal sólo es posible si en el primer valor nominal no se transmite ningún valor nominal de 32 bits.
PZD1 PZD2 PZD3 PZD4 STW SW1 SW2
El segundo y el tercer valor nominal tienen siempre una extensión de 16 bits. La función del segundo y del tercer valor nominal puede ajustarse en el convertidor, en el parámetro P547 "Función valor nominal"' y P548 "Función valor nominal 3" respectivamente.
Ambos valores nominales se transmiten como números enteros en el margen (-32768 a 32767). El valor 16384 (4000 HEX) corresponde al 100%. El valor C000 HEX corresponde al -100%, de modo que pueden transmitirse valores nominales en el margen –200% al +200%. Un valor nominal del 100% coincide entonces con la variable nominal correspondiente:
Ajuste 100% se corresponde con
Desact.
Frecuencia nominal, frecuencia real PID, frecuencia real PID limitada, frecuencia real PID supervisada, adición de frecuencia, sustracción de frecuencia, frecuencia máxima
Frecuencia máxima
Límite de corriente de par Límite de corriente de par (P112)
Límite de corriente Corriente nominal del convertidor
Par de giro derivativo Par de giro derivativo (P214)
Fig. 15-17: Correspondencias de los valores nominales
El valor nominal 1 (SW1)
Frecuencia nominal (16 bits)
Segundo y tercer valor nominal (SW2/3)
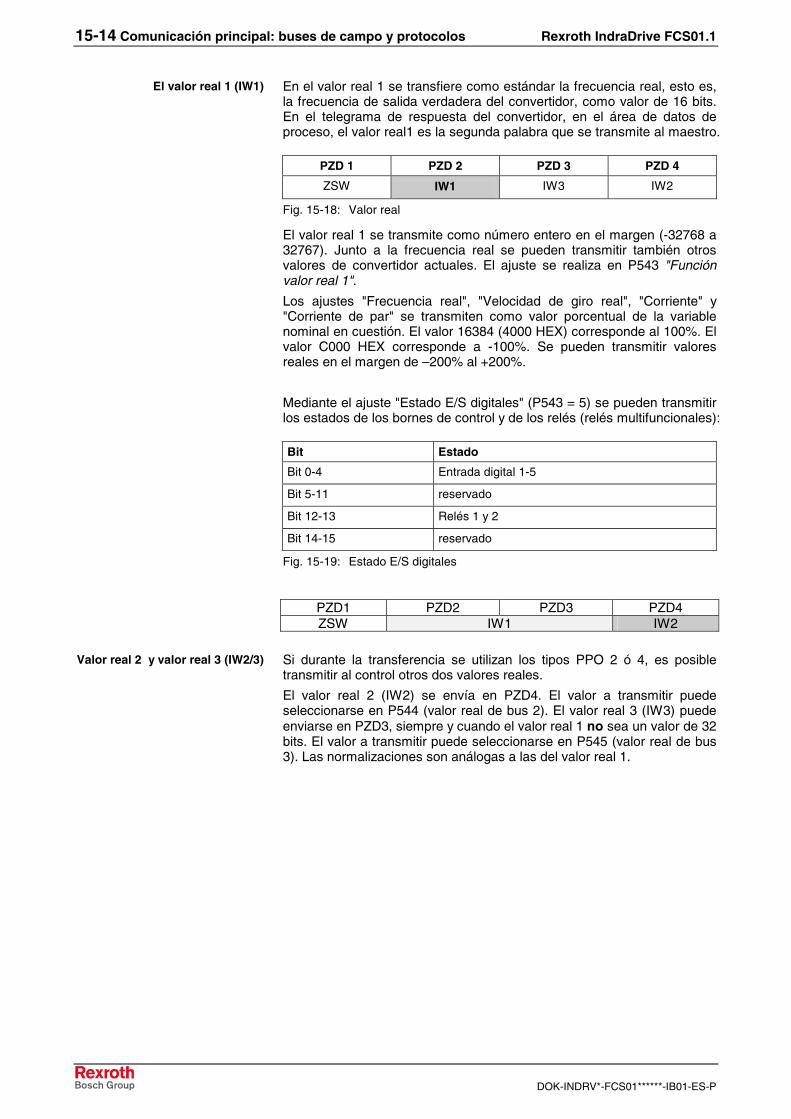
15-14 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
En el valor real 1 se transfiere como estándar la frecuencia real, esto es, la frecuencia de salida verdadera del convertidor, como valor de 16 bits. En el telegrama de respuesta del convertidor, en el área de datos de proceso, el valor real1 es la segunda palabra que se transmite al maestro.
PZD 1 PZD 2 PZD 3 PZD 4
ZSW IW1 IW3 IW2
Fig. 15-18: Valor real
El valor real 1 se transmite como número entero en el margen (-32768 a 32767). Junto a la frecuencia real se pueden transmitir también otros valores de convertidor actuales. El ajuste se realiza en P543 "Función valor real 1".
Los ajustes "Frecuencia real", "Velocidad de giro real", "Corriente" y "Corriente de par" se transmiten como valor porcentual de la variable nominal en cuestión. El valor 16384 (4000 HEX) corresponde al 100%. El valor C000 HEX corresponde a -100%. Se pueden transmitir valores reales en el margen de –200% al +200%.
Mediante el ajuste "Estado E/S digitales" (P543 = 5) se pueden transmitir los estados de los bornes de control y de los relés (relés multifuncionales):
Bit Estado
Bit 0-4 Entrada digital 1-5
Bit 5-11 reservado
Bit 12-13 Relés 1 y 2
Bit 14-15 reservado
Fig. 15-19: Estado E/S digitales
PZD1 PZD2 PZD3 PZD4 ZSW IW1 IW2
Si durante la transferencia se utilizan los tipos PPO 2 ó 4, es posible transmitir al control otros dos valores reales.
El valor real 2 (IW2) se envía en PZD4. El valor a transmitir puede seleccionarse en P544 (valor real de bus 2). El valor real 3 (IW3) puede enviarse en PZD3, siempre y cuando el valor real 1 no sea un valor de 32 bits. El valor a transmitir puede seleccionarse en P545 (valor real de bus 3). Las normalizaciones son análogas a las del valor real 1.
El valor real 1 (IW1)
Valor real 2 y valor real 3 (IW2/3)
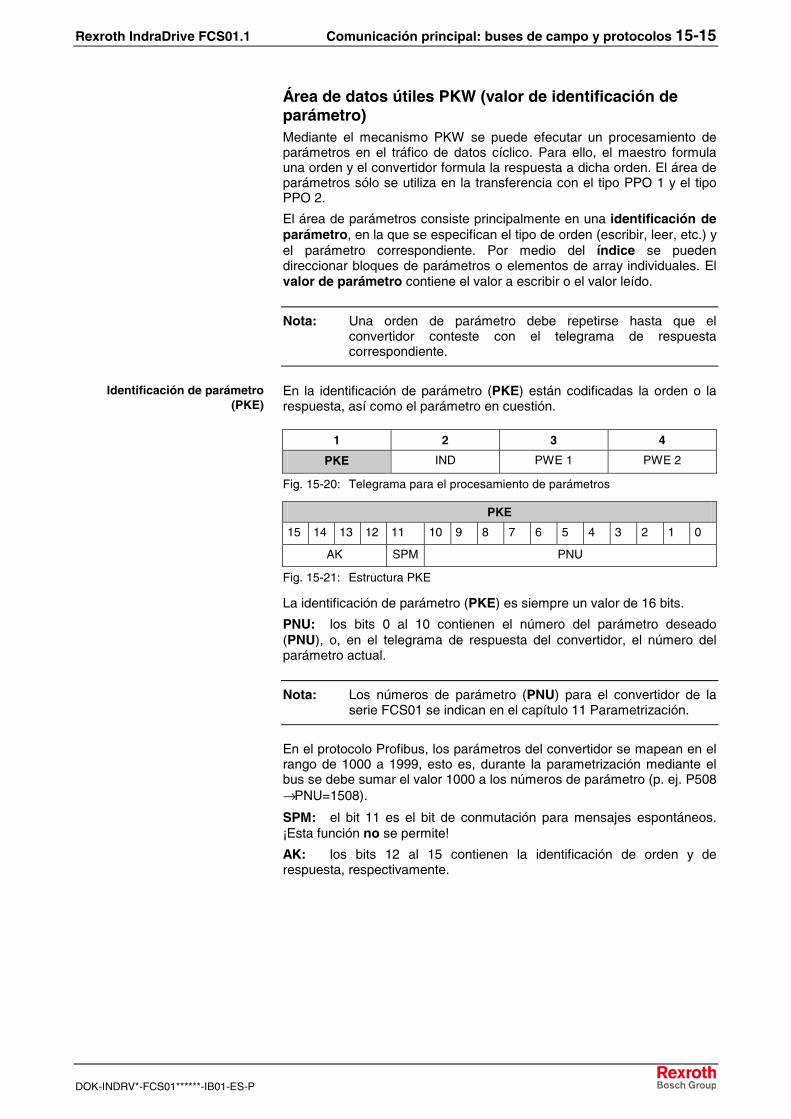
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-15
DOK-INDRV*-FCS01******-IB01-ES-P
Área de datos útiles PKW (valor de identificación de parámetro) Mediante el mecanismo PKW se puede efecutar un procesamiento de parámetros en el tráfico de datos cíclico. Para ello, el maestro formula una orden y el convertidor formula la respuesta a dicha orden. El área de parámetros sólo se utiliza en la transferencia con el tipo PPO 1 y el tipo PPO 2.
El área de parámetros consiste principalmente en una identificación de parámetro, en la que se especifican el tipo de orden (escribir, leer, etc.) y el parámetro correspondiente. Por medio del índice se pueden direccionar bloques de parámetros o elementos de array individuales. El valor de parámetro contiene el valor a escribir o el valor leído.
Nota: Una orden de parámetro debe repetirse hasta que el convertidor conteste con el telegrama de respuesta correspondiente.
En la identificación de parámetro (PKE) están codificadas la orden o la respuesta, así como el parámetro en cuestión.
1 2 3 4
PKE IND PWE 1 PWE 2
Fig. 15-20: Telegrama para el procesamiento de parámetros
PKE
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
AK SPM PNU
Fig. 15-21: Estructura PKE
La identificación de parámetro (PKE) es siempre un valor de 16 bits.
PNU: los bits 0 al 10 contienen el número del parámetro deseado (PNU), o, en el telegrama de respuesta del convertidor, el número del parámetro actual.
Nota: Los números de parámetro (PNU) para el convertidor de la serie FCS01 se indican en el capítulo 11 Parametrización.
En el protocolo Profibus, los parámetros del convertidor se mapean en el rango de 1000 a 1999, esto es, durante la parametrización mediante el bus se debe sumar el valor 1000 a los números de parámetro (p. ej. P508 → PNU=1508).
SPM: el bit 11 es el bit de conmutación para mensajes espontáneos. ¡Esta función no se permite!
AK: los bits 12 al 15 contienen la identificación de orden y de respuesta, respectivamente.
Identificación de parámetro (PKE)
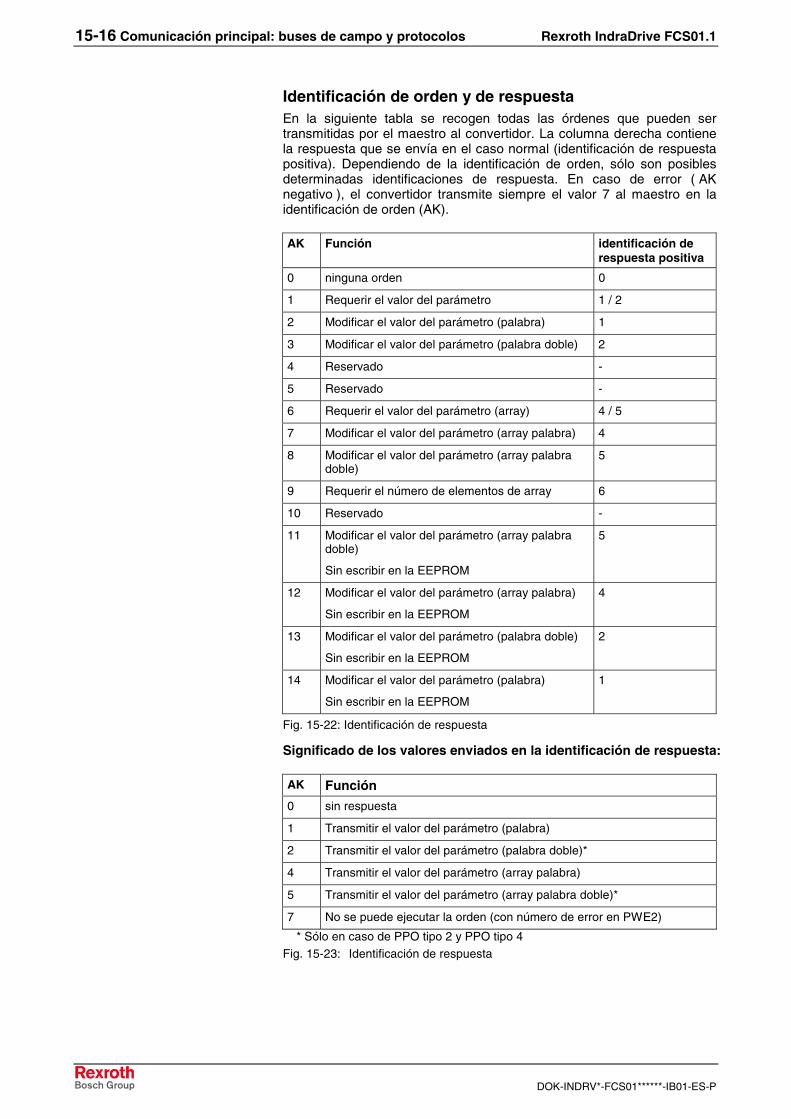
15-16 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Identificación de orden y de respuesta En la siguiente tabla se recogen todas las órdenes que pueden ser transmitidas por el maestro al convertidor. La columna derecha contiene la respuesta que se envía en el caso normal (identificación de respuesta positiva). Dependiendo de la identificación de orden, sólo son posibles determinadas identificaciones de respuesta. En caso de error ( AK negativo ), el convertidor transmite siempre el valor 7 al maestro en la identificación de orden (AK).
AK Función identificación de respuesta positiva
0 ninguna orden 0
1 Requerir el valor del parámetro 1 / 2
2 Modificar el valor del parámetro (palabra) 1
3 Modificar el valor del parámetro (palabra doble) 2
4 Reservado -
5 Reservado -
6 Requerir el valor del parámetro (array) 4 / 5
7 Modificar el valor del parámetro (array palabra) 4
8 Modificar el valor del parámetro (array palabra doble)
5
9 Requerir el número de elementos de array 6
10 Reservado -
11 Modificar el valor del parámetro (array palabra doble)
Sin escribir en la EEPROM
5
12 Modificar el valor del parámetro (array palabra)
Sin escribir en la EEPROM
4
13 Modificar el valor del parámetro (palabra doble)
Sin escribir en la EEPROM
2
14 Modificar el valor del parámetro (palabra)
Sin escribir en la EEPROM
1
Fig. 15-22: Identificación de respuesta
Significado de los valores enviados en la identificación de respuesta:
AK Función
0 sin respuesta
1 Transmitir el valor del parámetro (palabra)
2 Transmitir el valor del parámetro (palabra doble)*
4 Transmitir el valor del parámetro (array palabra)
5 Transmitir el valor del parámetro (array palabra doble)*
7 No se puede ejecutar la orden (con número de error en PWE2)
* Sólo en caso de PPO tipo 2 y PPO tipo 4 Fig. 15-23: Identificación de respuesta
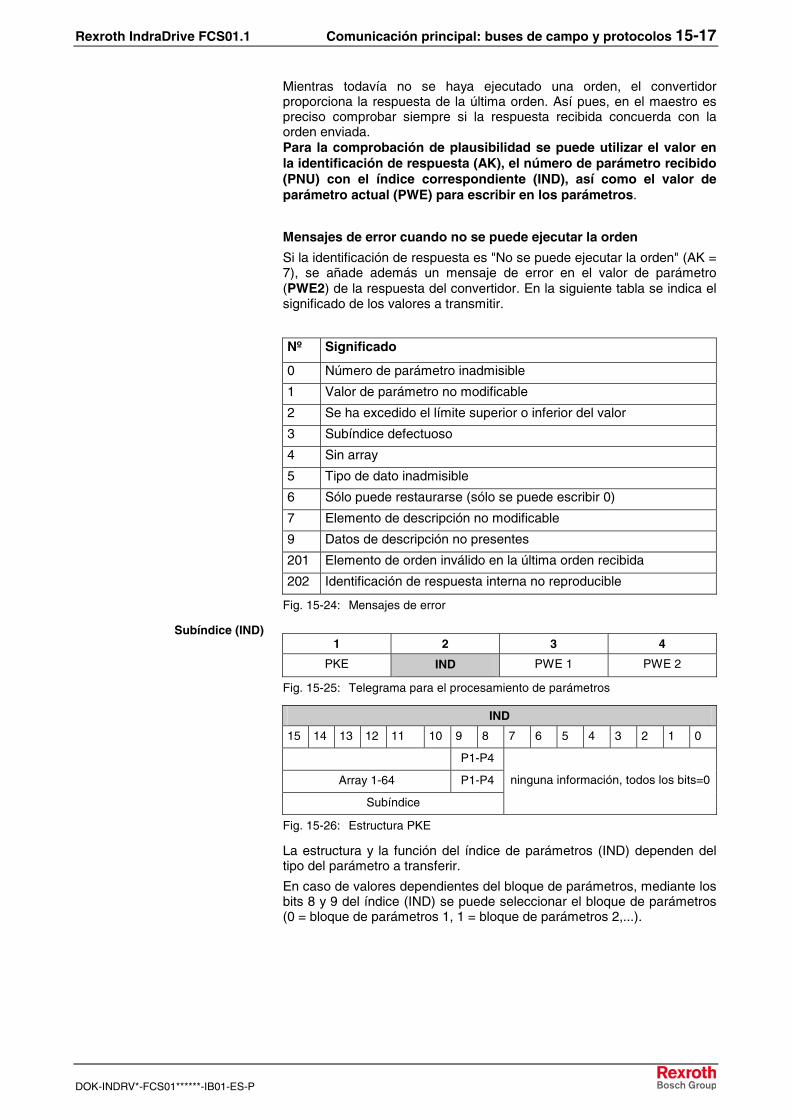
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-17
DOK-INDRV*-FCS01******-IB01-ES-P
Mientras todavía no se haya ejecutado una orden, el convertidor proporciona la respuesta de la última orden. Así pues, en el maestro es preciso comprobar siempre si la respuesta recibida concuerda con la orden enviada. Para la comprobación de plausibilidad se puede utilizar el valor en la identificación de respuesta (AK), el número de parámetro recibido (PNU) con el índice correspondiente (IND), así como el valor de parámetro actual (PWE) para escribir en los parámetros.
Mensajes de error cuando no se puede ejecutar la orden
Si la identificación de respuesta es "No se puede ejecutar la orden" (AK = 7), se añade además un mensaje de error en el valor de parámetro (PWE2) de la respuesta del convertidor. En la siguiente tabla se indica el significado de los valores a transmitir.
Nº Significado
0 Número de parámetro inadmisible
1 Valor de parámetro no modificable
2 Se ha excedido el límite superior o inferior del valor
3 Subíndice defectuoso
4 Sin array
5 Tipo de dato inadmisible
6 Sólo puede restaurarse (sólo se puede escribir 0)
7 Elemento de descripción no modificable
9 Datos de descripción no presentes
201 Elemento de orden inválido en la última orden recibida
202 Identificación de respuesta interna no reproducible
Fig. 15-24: Mensajes de error
1 2 3 4
PKE IND PWE 1 PWE 2
Fig. 15-25: Telegrama para el procesamiento de parámetros
IND
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
P1-P4
Array 1-64 P1-P4
Subíndice
ninguna información, todos los bits=0
Fig. 15-26: Estructura PKE
La estructura y la función del índice de parámetros (IND) dependen del tipo del parámetro a transferir.
En caso de valores dependientes del bloque de parámetros, mediante los bits 8 y 9 del índice (IND) se puede seleccionar el bloque de parámetros (0 = bloque de parámetros 1, 1 = bloque de parámetros 2,...).
Subíndice (IND)
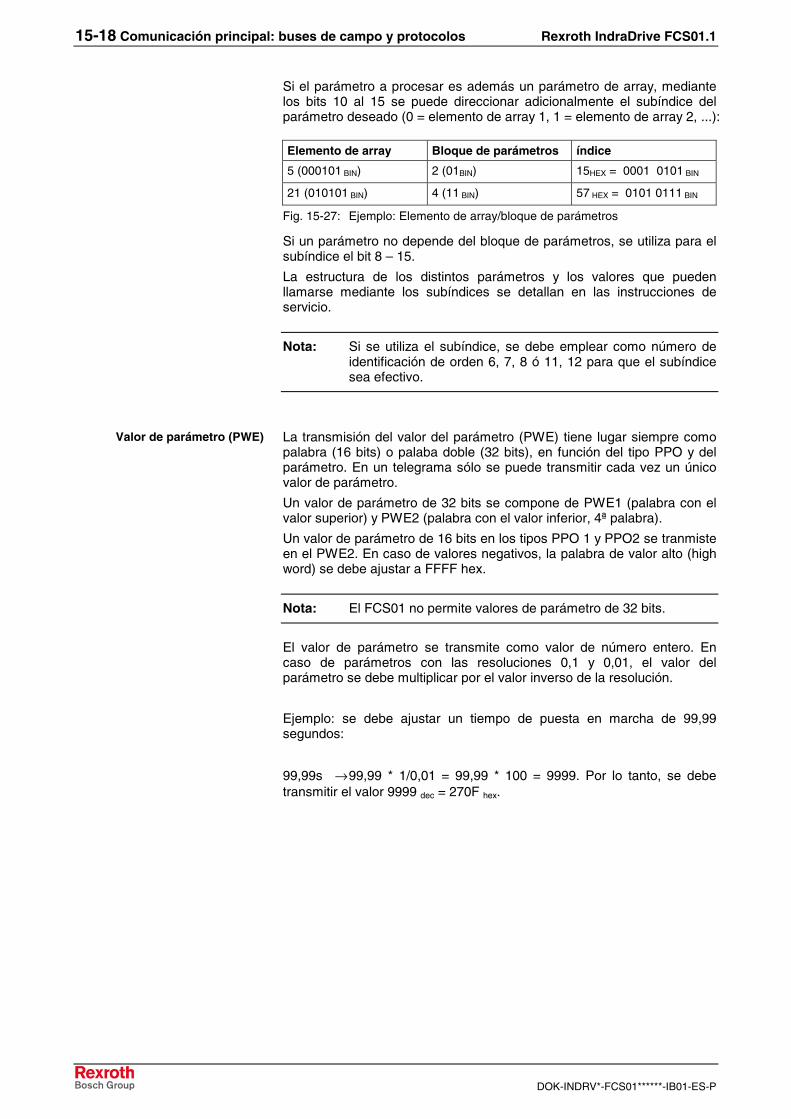
15-18 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Si el parámetro a procesar es además un parámetro de array, mediante los bits 10 al 15 se puede direccionar adicionalmente el subíndice del parámetro deseado (0 = elemento de array 1, 1 = elemento de array 2, ...):
Elemento de array Bloque de parámetros índice
5 (000101 BIN) 2 (01BIN) 15HEX = 0001 0101 BIN
21 (010101 BIN) 4 (11 BIN) 57 HEX = 0101 0111 BIN
Fig. 15-27: Ejemplo: Elemento de array/bloque de parámetros
Si un parámetro no depende del bloque de parámetros, se utiliza para el subíndice el bit 8 – 15.
La estructura de los distintos parámetros y los valores que pueden llamarse mediante los subíndices se detallan en las instrucciones de servicio.
Nota: Si se utiliza el subíndice, se debe emplear como número de identificación de orden 6, 7, 8 ó 11, 12 para que el subíndice sea efectivo.
La transmisión del valor del parámetro (PWE) tiene lugar siempre como palabra (16 bits) o palaba doble (32 bits), en función del tipo PPO y del parámetro. En un telegrama sólo se puede transmitir cada vez un único valor de parámetro.
Un valor de parámetro de 32 bits se compone de PWE1 (palabra con el valor superior) y PWE2 (palabra con el valor inferior, 4ª palabra).
Un valor de parámetro de 16 bits en los tipos PPO 1 y PPO2 se tranmiste en el PWE2. En caso de valores negativos, la palabra de valor alto (high word) se debe ajustar a FFFF hex.
Nota: El FCS01 no permite valores de parámetro de 32 bits.
El valor de parámetro se transmite como valor de número entero. En caso de parámetros con las resoluciones 0,1 y 0,01, el valor del parámetro se debe multiplicar por el valor inverso de la resolución.
Ejemplo: se debe ajustar un tiempo de puesta en marcha de 99,99 segundos:
99,99s → 99,99 * 1/0,01 = 99,99 * 100 = 9999. Por lo tanto, se debe transmitir el valor 9999 dec = 270F hex.
Valor de parámetro (PWE)
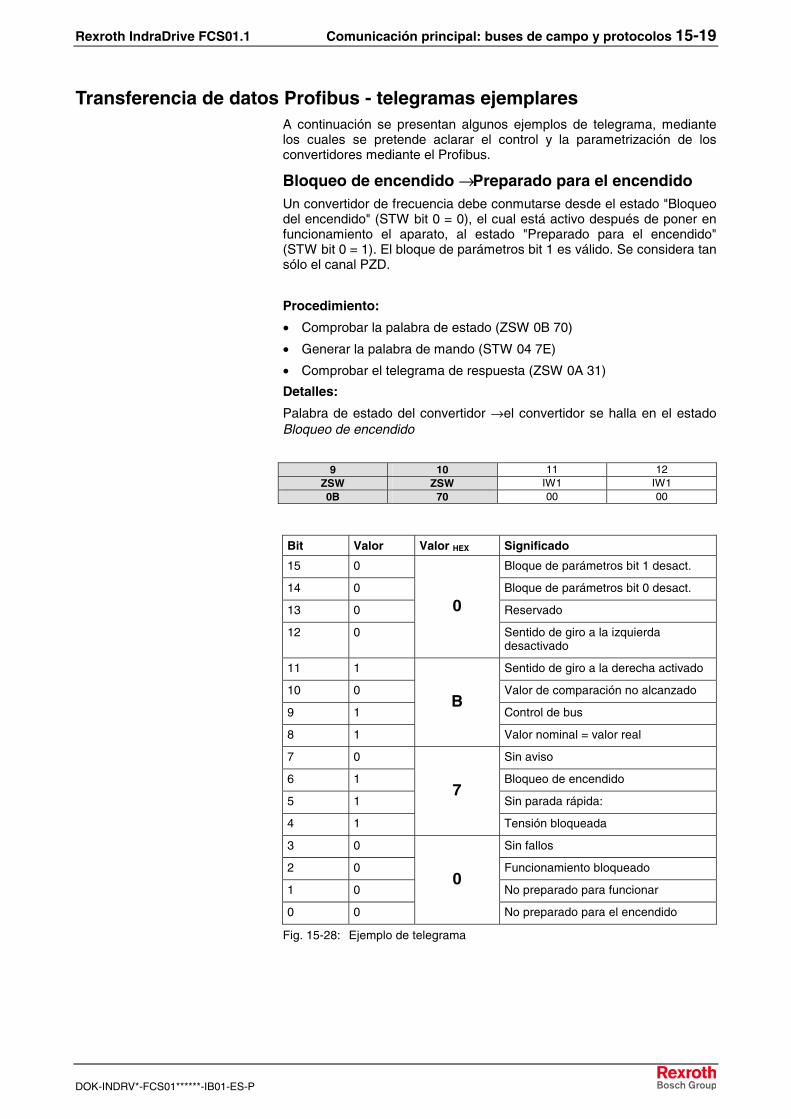
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-19
DOK-INDRV*-FCS01******-IB01-ES-P
Transferencia de datos Profibus - telegramas ejemplares A continuación se presentan algunos ejemplos de telegrama, mediante los cuales se pretende aclarar el control y la parametrización de los convertidores mediante el Profibus.
Bloqueo de encendido → Preparado para el encendido Un convertidor de frecuencia debe conmutarse desde el estado "Bloqueo del encendido" (STW bit 0 = 0), el cual está activo después de poner en funcionamiento el aparato, al estado "Preparado para el encendido" (STW bit 0 = 1). El bloque de parámetros bit 1 es válido. Se considera tan sólo el canal PZD.
Procedimiento:
• Comprobar la palabra de estado (ZSW 0B 70)
• Generar la palabra de mando (STW 04 7E)
• Comprobar el telegrama de respuesta (ZSW 0A 31)
Detalles:
Palabra de estado del convertidor → el convertidor se halla en el estado Bloqueo de encendido
9 10 11 12
ZSW ZSW IW1 IW1 0B 70 00 00
Bit Valor Valor HEX Significado
15 0 Bloque de parámetros bit 1 desact.
14 0 Bloque de parámetros bit 0 desact.
13 0 Reservado
12 0
0
Sentido de giro a la izquierda desactivado
11 1 Sentido de giro a la derecha activado
10 0 Valor de comparación no alcanzado
9 1 Control de bus
8 1
B
Valor nominal = valor real
7 0 Sin aviso
6 1 Bloqueo de encendido
5 1 Sin parada rápida:
4 1
7
Tensión bloqueada
3 0 Sin fallos
2 0 Funcionamiento bloqueado
1 0 No preparado para funcionar
0 0
0
No preparado para el encendido
Fig. 15-28: Ejemplo de telegrama
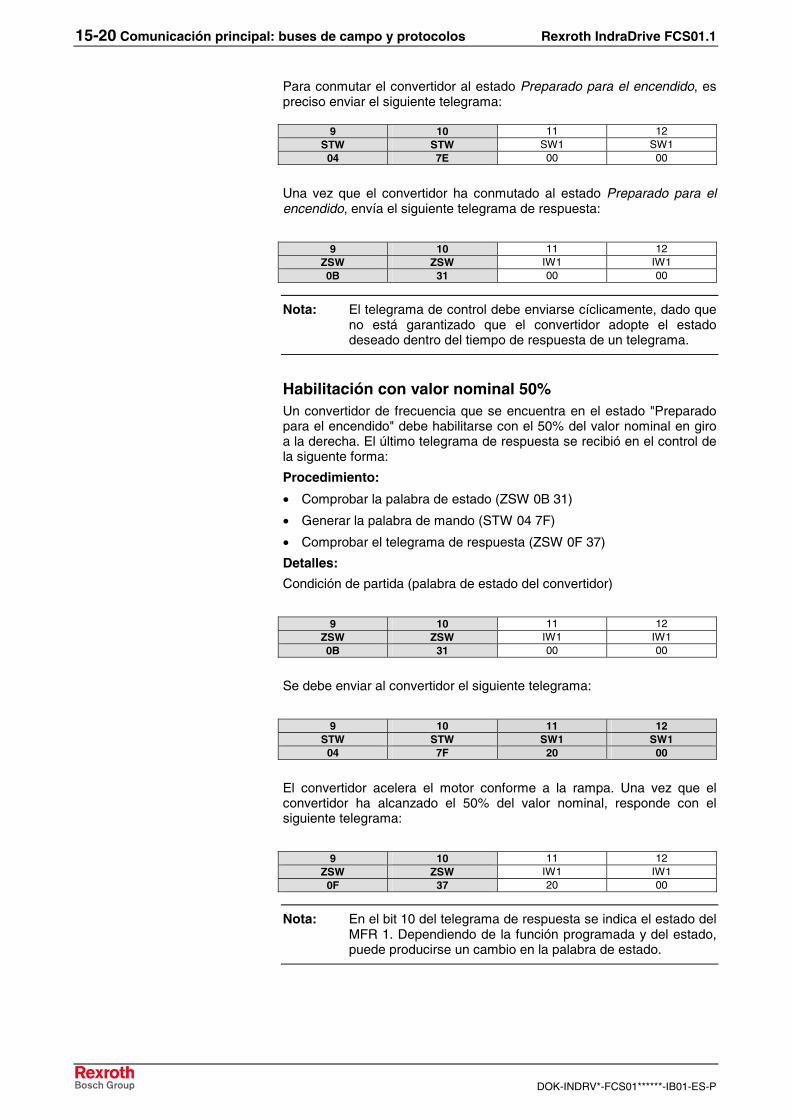
15-20 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Para conmutar el convertidor al estado Preparado para el encendido, es preciso enviar el siguiente telegrama:
9 10 11 12 STW STW SW1 SW1
04 7E 00 00
Una vez que el convertidor ha conmutado al estado Preparado para el encendido, envía el siguiente telegrama de respuesta:
9 10 11 12
ZSW ZSW IW1 IW1 0B 31 00 00
Nota: El telegrama de control debe enviarse cíclicamente, dado que no está garantizado que el convertidor adopte el estado deseado dentro del tiempo de respuesta de un telegrama.
Habilitación con valor nominal 50% Un convertidor de frecuencia que se encuentra en el estado "Preparado para el encendido" debe habilitarse con el 50% del valor nominal en giro a la derecha. El último telegrama de respuesta se recibió en el control de la siguente forma:
Procedimiento:
• Comprobar la palabra de estado (ZSW 0B 31)
• Generar la palabra de mando (STW 04 7F)
• Comprobar el telegrama de respuesta (ZSW 0F 37)
Detalles:
Condición de partida (palabra de estado del convertidor)
9 10 11 12
ZSW ZSW IW1 IW1 0B 31 00 00
Se debe enviar al convertidor el siguiente telegrama:
9 10 11 12
STW STW SW1 SW1 04 7F 20 00
El convertidor acelera el motor conforme a la rampa. Una vez que el convertidor ha alcanzado el 50% del valor nominal, responde con el siguiente telegrama:
9 10 11 12
ZSW ZSW IW1 IW1 0F 37 20 00
Nota: En el bit 10 del telegrama de respuesta se indica el estado del MFR 1. Dependiendo de la función programada y del estado, puede producirse un cambio en la palabra de estado.
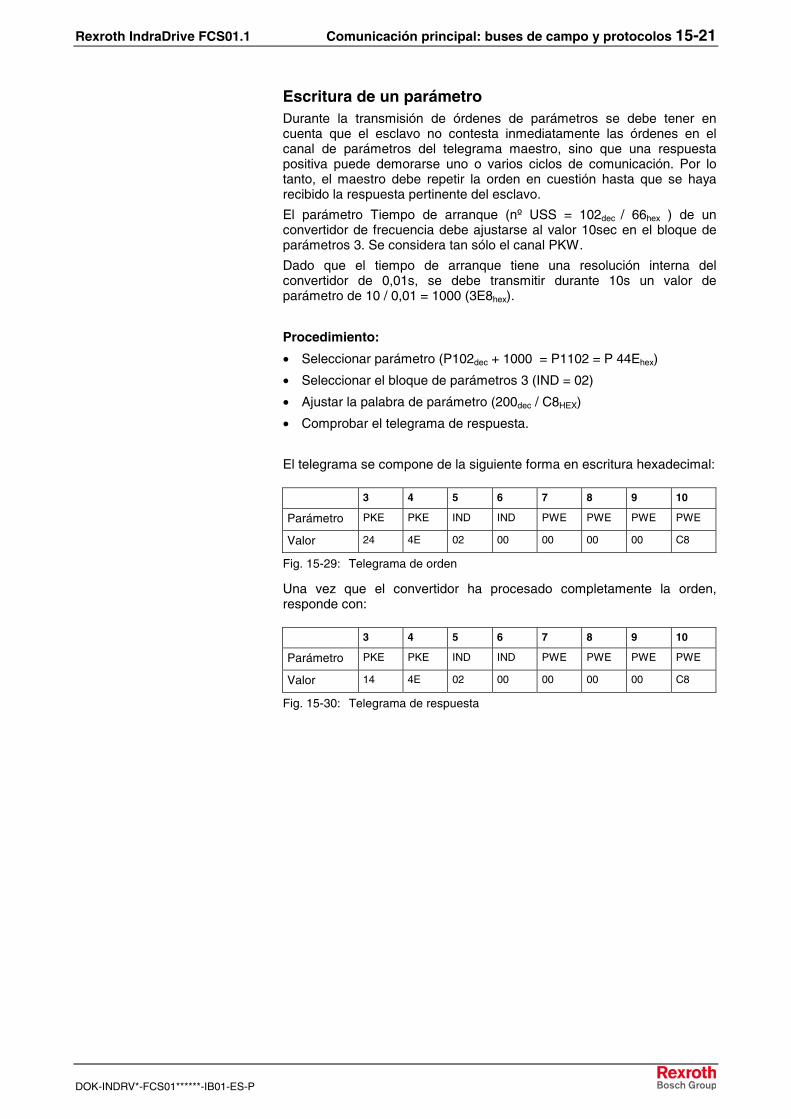
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-21
DOK-INDRV*-FCS01******-IB01-ES-P
Escritura de un parámetro Durante la transmisión de órdenes de parámetros se debe tener en cuenta que el esclavo no contesta inmediatamente las órdenes en el canal de parámetros del telegrama maestro, sino que una respuesta positiva puede demorarse uno o varios ciclos de comunicación. Por lo tanto, el maestro debe repetir la orden en cuestión hasta que se haya recibido la respuesta pertinente del esclavo.
El parámetro Tiempo de arranque (nº USS = 102dec / 66hex ) de un convertidor de frecuencia debe ajustarse al valor 10sec en el bloque de parámetros 3. Se considera tan sólo el canal PKW.
Dado que el tiempo de arranque tiene una resolución interna del convertidor de 0,01s, se debe transmitir durante 10s un valor de parámetro de 10 / 0,01 = 1000 (3E8hex).
Procedimiento:
• Seleccionar parámetro (P102dec + 1000 = P1102 = P 44Ehex)
• Seleccionar el bloque de parámetros 3 (IND = 02)
• Ajustar la palabra de parámetro (200dec / C8HEX)
• Comprobar el telegrama de respuesta.
El telegrama se compone de la siguiente forma en escritura hexadecimal:
3 4 5 6 7 8 9 10
Parámetro PKE PKE IND IND PWE PWE PWE PWE
Valor 24 4E 02 00 00 00 00 C8
Fig. 15-29: Telegrama de orden
Una vez que el convertidor ha procesado completamente la orden, responde con:
3 4 5 6 7 8 9 10
Parámetro PKE PKE IND IND PWE PWE PWE PWE
Valor 14 4E 02 00 00 00 00 C8
Fig. 15-30: Telegrama de respuesta
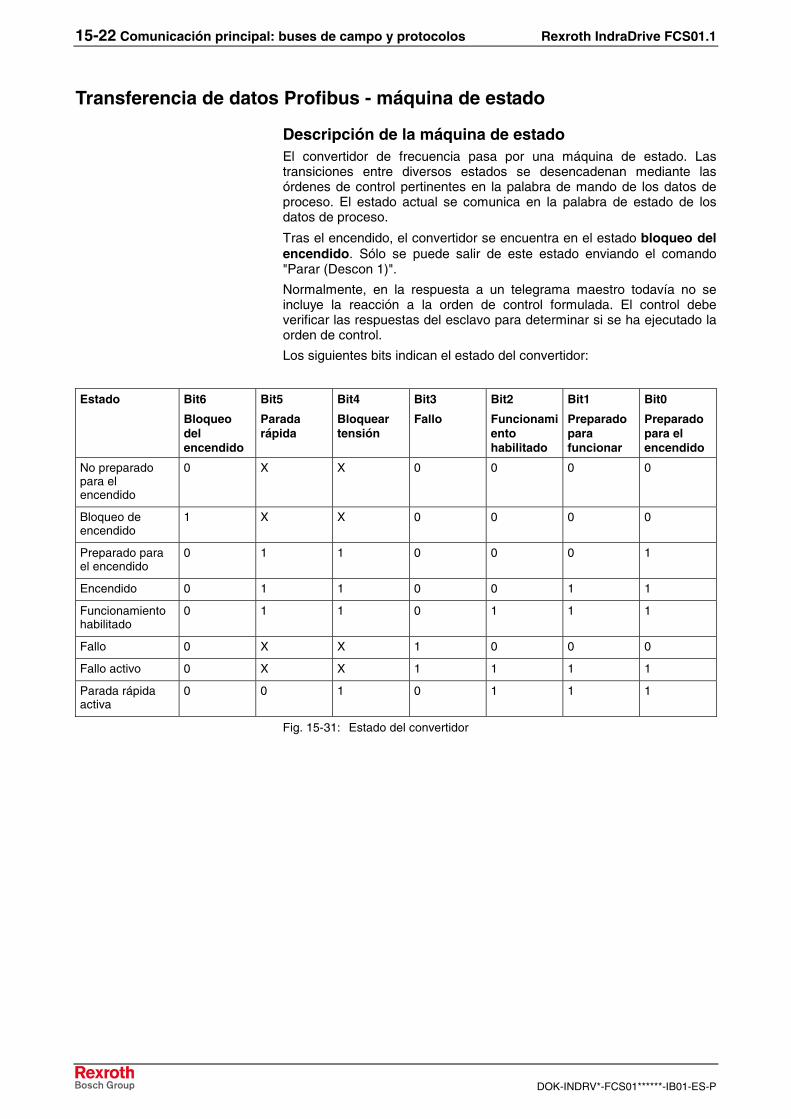
15-22 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Transferencia de datos Profibus - máquina de estado
Descripción de la máquina de estado El convertidor de frecuencia pasa por una máquina de estado. Las transiciones entre diversos estados se desencadenan mediante las órdenes de control pertinentes en la palabra de mando de los datos de proceso. El estado actual se comunica en la palabra de estado de los datos de proceso.
Tras el encendido, el convertidor se encuentra en el estado bloqueo del encendido. Sólo se puede salir de este estado enviando el comando "Parar (Descon 1)".
Normalmente, en la respuesta a un telegrama maestro todavía no se incluye la reacción a la orden de control formulada. El control debe verificar las respuestas del esclavo para determinar si se ha ejecutado la orden de control.
Los siguientes bits indican el estado del convertidor:
Estado Bit6
Bloqueo del encendido
Bit5
Parada rápida
Bit4
Bloquear tensión
Bit3
Fallo
Bit2
Funcionamiento habilitado
Bit1
Preparado para funcionar
Bit0
Preparado para el encendido
No preparado para el encendido
0 X X 0 0 0 0
Bloqueo de encendido
1 X X 0 0 0 0
Preparado para el encendido
0 1 1 0 0 0 1
Encendido 0 1 1 0 0 1 1
Funcionamiento habilitado
0 1 1 0 1 1 1
Fallo 0 X X 1 0 0 0
Fallo activo 0 X X 1 1 1 1
Parada rápida activa
0 0 1 0 1 1 1
Fig. 15-31: Estado del convertidor
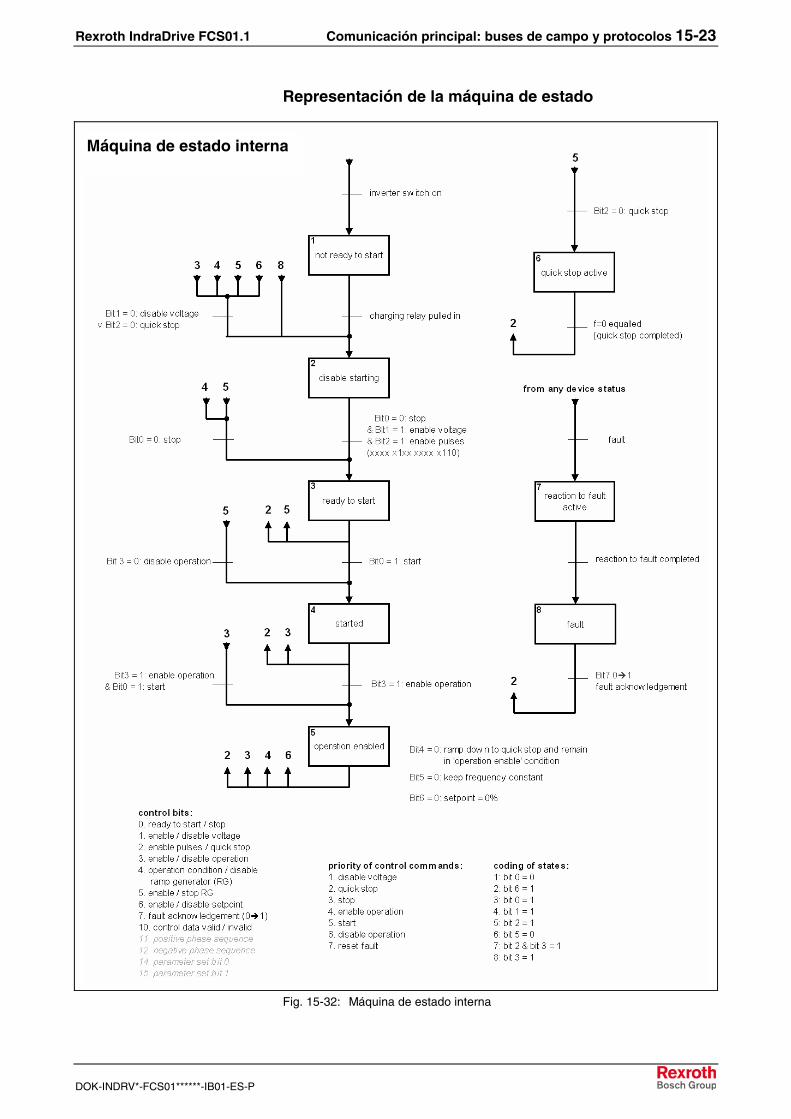
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-23
DOK-INDRV*-FCS01******-IB01-ES-P
Representación de la máquina de estado
Fig. 15-32: Máquina de estado interna
Máquina de estado interna
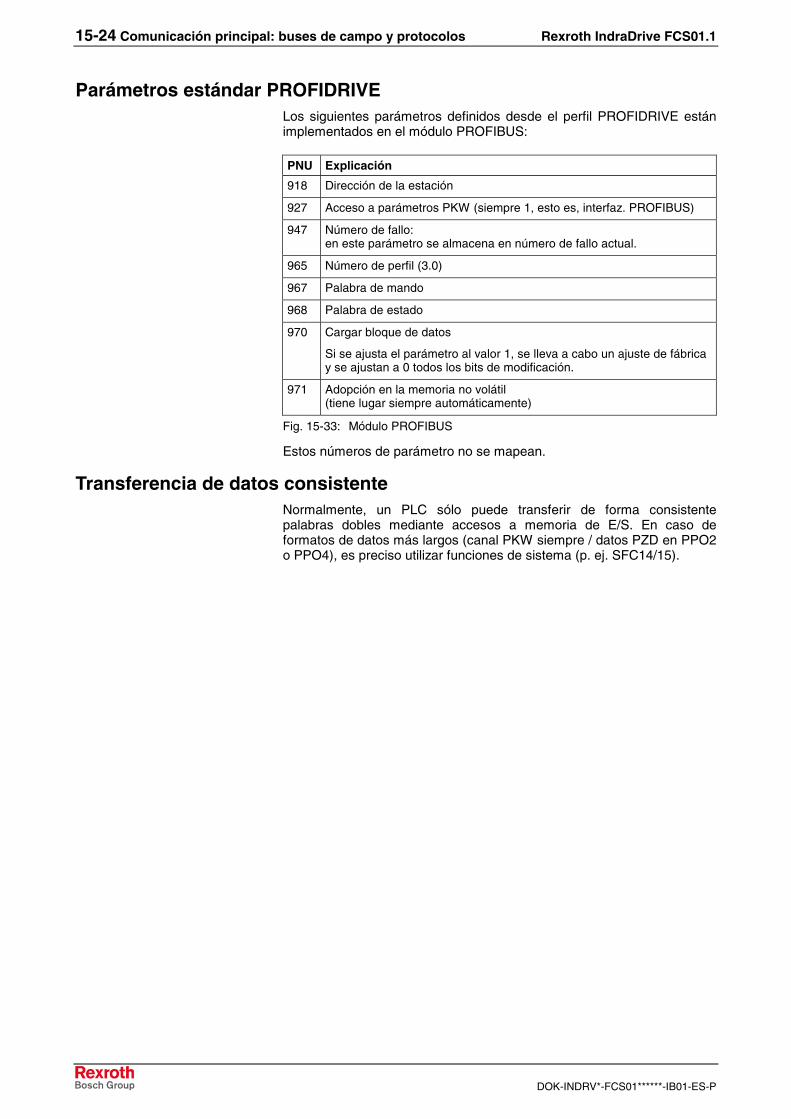
15-24 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Parámetros estándar PROFIDRIVE Los siguientes parámetros definidos desde el perfil PROFIDRIVE están implementados en el módulo PROFIBUS:
PNU Explicación
918 Dirección de la estación
927 Acceso a parámetros PKW (siempre 1, esto es, interfaz. PROFIBUS)
947 Número de fallo: en este parámetro se almacena en número de fallo actual.
965 Número de perfil (3.0)
967 Palabra de mando
968 Palabra de estado
970 Cargar bloque de datos
Si se ajusta el parámetro al valor 1, se lleva a cabo un ajuste de fábrica y se ajustan a 0 todos los bits de modificación.
971 Adopción en la memoria no volátil (tiene lugar siempre automáticamente)
Fig. 15-33: Módulo PROFIBUS
Estos números de parámetro no se mapean.
Transferencia de datos consistente Normalmente, un PLC sólo puede transferir de forma consistente palabras dobles mediante accesos a memoria de E/S. En caso de formatos de datos más largos (canal PKW siempre / datos PZD en PPO2 o PPO4), es preciso utilizar funciones de sistema (p. ej. SFC14/15).

Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-25
DOK-INDRV*-FCS01******-IB01-ES-P
15.3 CANopen
Uso y aplicación Los aparatos básicos no poseen, en la versión básica, componentes para la parametrización o el control. Para poder establecer una comunicación mediante CANopen, debe utilizarse un módulo de tecnología CANopen.
Se permiten la especificación CANopen DS-301 y DS-402 de la CiA.
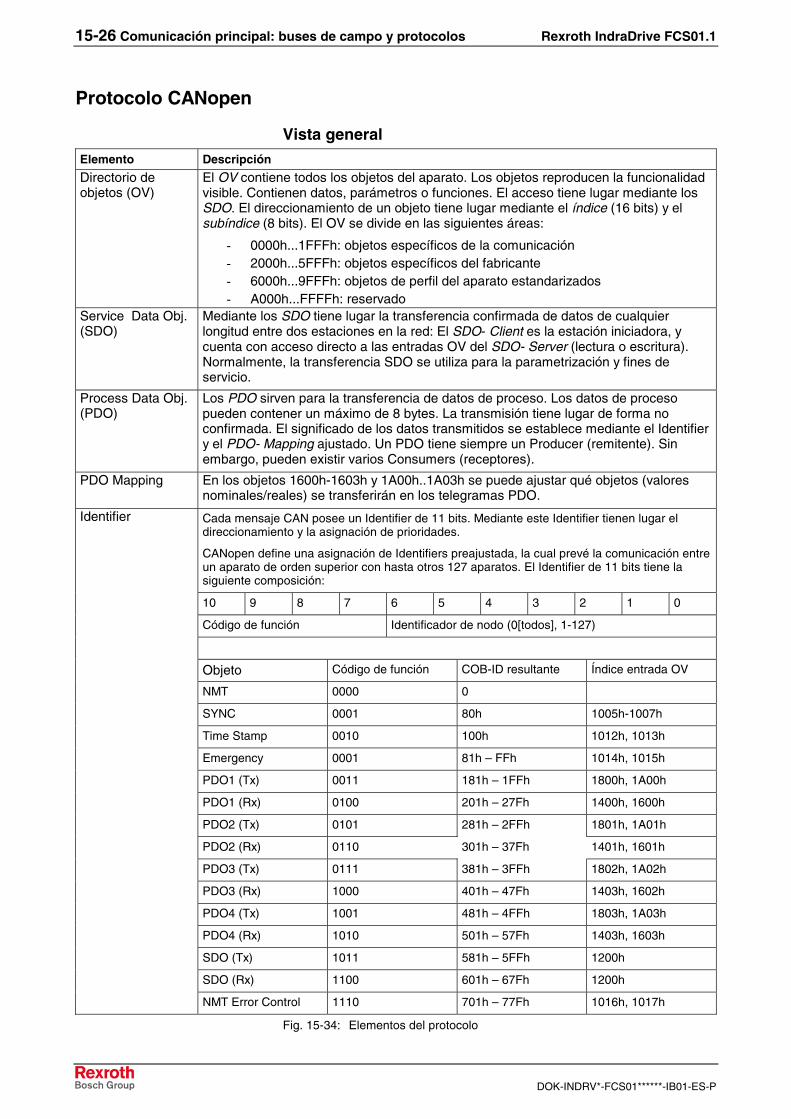
15-26 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Protocolo CANopen
Vista general Elemento Descripción
Directorio de objetos (OV)
El OV contiene todos los objetos del aparato. Los objetos reproducen la funcionalidad visible. Contienen datos, parámetros o funciones. El acceso tiene lugar mediante los SDO. El direccionamiento de un objeto tiene lugar mediante el índice (16 bits) y el subíndice (8 bits). El OV se divide en las siguientes áreas:
- 0000h...1FFFh: objetos específicos de la comunicación - 2000h...5FFFh: objetos específicos del fabricante - 6000h...9FFFh: objetos de perfil del aparato estandarizados - A000h...FFFFh: reservado
Service Data Obj. (SDO)
Mediante los SDO tiene lugar la transferencia confirmada de datos de cualquier longitud entre dos estaciones en la red: El SDO- Client es la estación iniciadora, y cuenta con acceso directo a las entradas OV del SDO- Server (lectura o escritura). Normalmente, la transferencia SDO se utiliza para la parametrización y fines de servicio.
Process Data Obj. (PDO)
Los PDO sirven para la transferencia de datos de proceso. Los datos de proceso pueden contener un máximo de 8 bytes. La transmisión tiene lugar de forma no confirmada. El significado de los datos transmitidos se establece mediante el Identifier y el PDO- Mapping ajustado. Un PDO tiene siempre un Producer (remitente). Sin embargo, pueden existir varios Consumers (receptores).
PDO Mapping En los objetos 1600h-1603h y 1A00h..1A03h se puede ajustar qué objetos (valores nominales/reales) se transferirán en los telegramas PDO.
Cada mensaje CAN posee un Identifier de 11 bits. Mediante este Identifier tienen lugar el direccionamiento y la asignación de prioridades.
CANopen define una asignación de Identifiers preajustada, la cual prevé la comunicación entre un aparato de orden superior con hasta otros 127 aparatos. El Identifier de 11 bits tiene la siguiente composición:
10 9 8 7 6 5 4 3 2 1 0
Código de función Identificador de nodo (0[todos], 1-127)
Objeto Código de función COB-ID resultante Índice entrada OV
NMT 0000 0
SYNC 0001 80h 1005h-1007h
Time Stamp 0010 100h 1012h, 1013h
Emergency 0001 81h – FFh 1014h, 1015h
PDO1 (Tx) 0011 181h – 1FFh 1800h, 1A00h
PDO1 (Rx) 0100 201h – 27Fh 1400h, 1600h
PDO2 (Tx) 0101 281h – 2FFh 1801h, 1A01h
PDO2 (Rx) 0110 301h – 37Fh 1401h, 1601h
PDO3 (Tx) 0111 381h – 3FFh 1802h, 1A02h
PDO3 (Rx) 1000 401h – 47Fh 1403h, 1602h
PDO4 (Tx) 1001 481h – 4FFh 1803h, 1A03h
PDO4 (Rx) 1010 501h – 57Fh 1403h, 1603h
SDO (Tx) 1011 581h – 5FFh 1200h
SDO (Rx) 1100 601h – 67Fh 1200h
Identifier
NMT Error Control 1110 701h – 77Fh 1016h, 1017h
Fig. 15-34: Elementos del protocolo
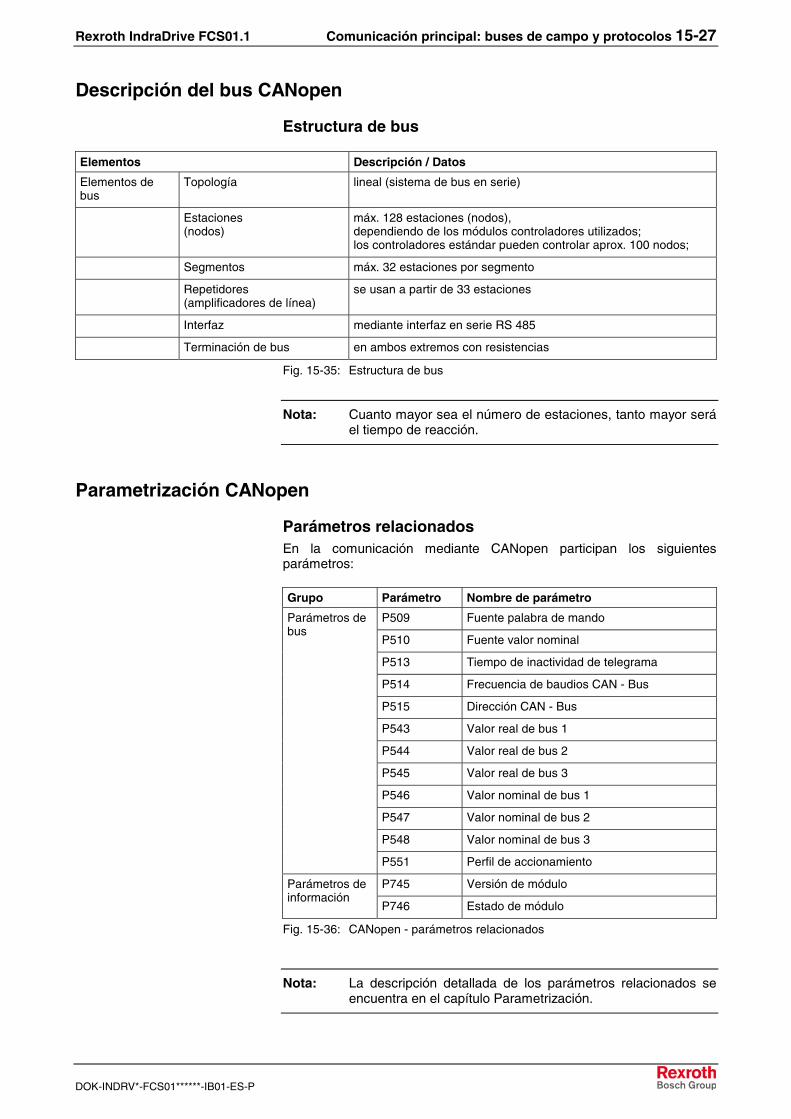
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-27
DOK-INDRV*-FCS01******-IB01-ES-P
Descripción del bus CANopen
Estructura de bus
Elementos Descripción / Datos
Elementos de bus
Topología lineal (sistema de bus en serie)
Estaciones (nodos)
máx. 128 estaciones (nodos), dependiendo de los módulos controladores utilizados; los controladores estándar pueden controlar aprox. 100 nodos;
Segmentos máx. 32 estaciones por segmento
Repetidores (amplificadores de línea)
se usan a partir de 33 estaciones
Interfaz mediante interfaz en serie RS 485
Terminación de bus en ambos extremos con resistencias
Fig. 15-35: Estructura de bus
Nota: Cuanto mayor sea el número de estaciones, tanto mayor será el tiempo de reacción.
Parametrización CANopen
Parámetros relacionados En la comunicación mediante CANopen participan los siguientes parámetros:
Grupo Parámetro Nombre de parámetro
P509 Fuente palabra de mando
P510 Fuente valor nominal
P513 Tiempo de inactividad de telegrama
P514 Frecuencia de baudios CAN - Bus
P515 Dirección CAN - Bus
P543 Valor real de bus 1
P544 Valor real de bus 2
P545 Valor real de bus 3
P546 Valor nominal de bus 1
P547 Valor nominal de bus 2
P548 Valor nominal de bus 3
Parámetros de bus
P551 Perfil de accionamiento
P745 Versión de módulo Parámetros de información
P746 Estado de módulo
Fig. 15-36: CANopen - parámetros relacionados
Nota: La descripción detallada de los parámetros relacionados se encuentra en el capítulo Parametrización.

15-28 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Ajustes previos - activación de CANopen Para poder utilizar el convertidor con el protocolo CANopen , además de la conexión de bus con el maestro se deben realizar algunos ajustes en el convertidor de frecuencia.
En el protocolo CANopen, los parámetros del convertidor se mapean en el rango de 2000hex hasta 23E7hex = 8192dec hasta 9191dec, esto es, durante la parametrización mediante el bus se debe sumar el valor 2000hex a los números de parámetro (p. ej. P508 → Obj 21FChex).
La parametrización del convertidor puede realizarse en cualquier momento. El control del convertidor mediante CANopen puede activarse ajustando el parámetro P509 al valor 6.
Nota: Tras la activación, las funciones Bloquear tensión, Parada rápida, Control remoto y Confirmación de fallos se hallan disponibles normalmente en los bornes de control (localmente). Para hacer funcionar el accionamiento, debe estar presente una señal high en las entradas digitales utilizadas para que sea posible habilitar el accionamiento.
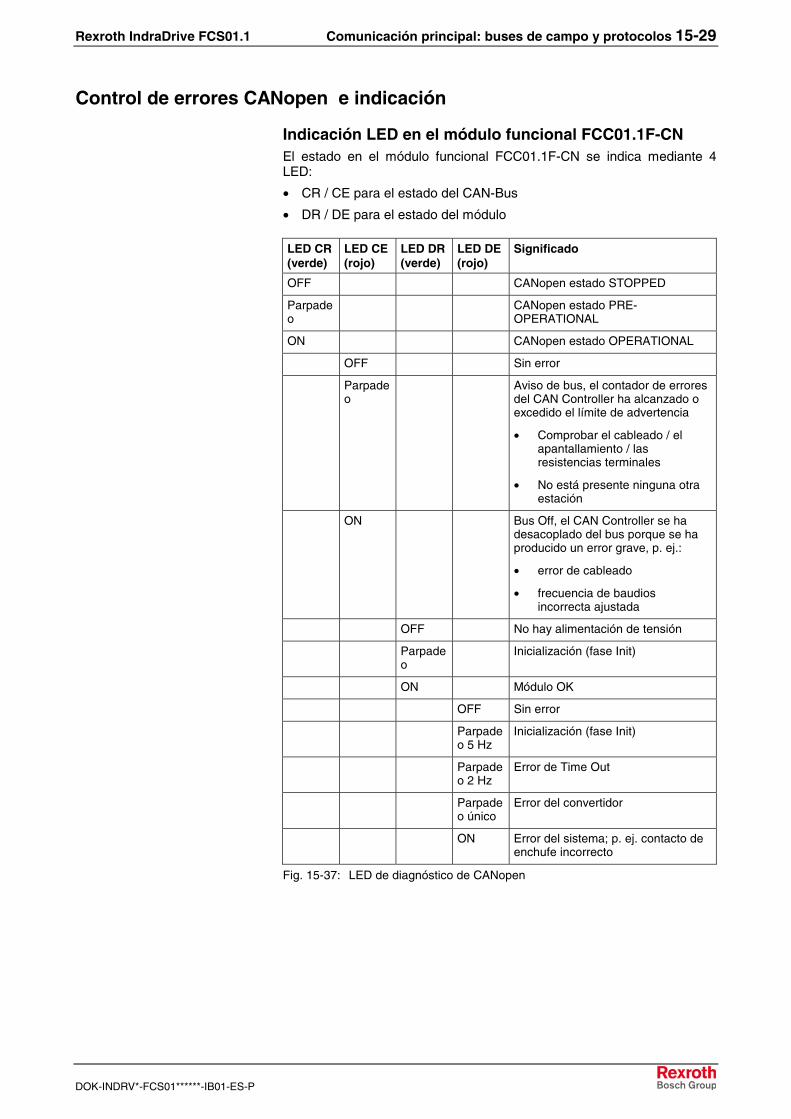
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-29
DOK-INDRV*-FCS01******-IB01-ES-P
Control de errores CANopen e indicación
Indicación LED en el módulo funcional FCC01.1F-CN El estado en el módulo funcional FCC01.1F-CN se indica mediante 4 LED:
• CR / CE para el estado del CAN-Bus
• DR / DE para el estado del módulo
LED CR (verde)
LED CE (rojo)
LED DR (verde)
LED DE (rojo)
Significado
OFF CANopen estado STOPPED
Parpadeo
CANopen estado PRE-OPERATIONAL
ON CANopen estado OPERATIONAL
OFF Sin error
Parpadeo
Aviso de bus, el contador de errores del CAN Controller ha alcanzado o excedido el límite de advertencia
• Comprobar el cableado / el apantallamiento / las resistencias terminales
• No está presente ninguna otra estación
ON Bus Off, el CAN Controller se ha desacoplado del bus porque se ha producido un error grave, p. ej.:
• error de cableado
• frecuencia de baudios incorrecta ajustada
OFF No hay alimentación de tensión
Parpadeo
Inicialización (fase Init)
ON Módulo OK
OFF Sin error
Parpadeo 5 Hz
Inicialización (fase Init)
Parpadeo 2 Hz
Error de Time Out
Parpadeo único
Error del convertidor
ON Error del sistema; p. ej. contacto de enchufe incorrecto
Fig. 15-37: LED de diagnóstico de CANopen
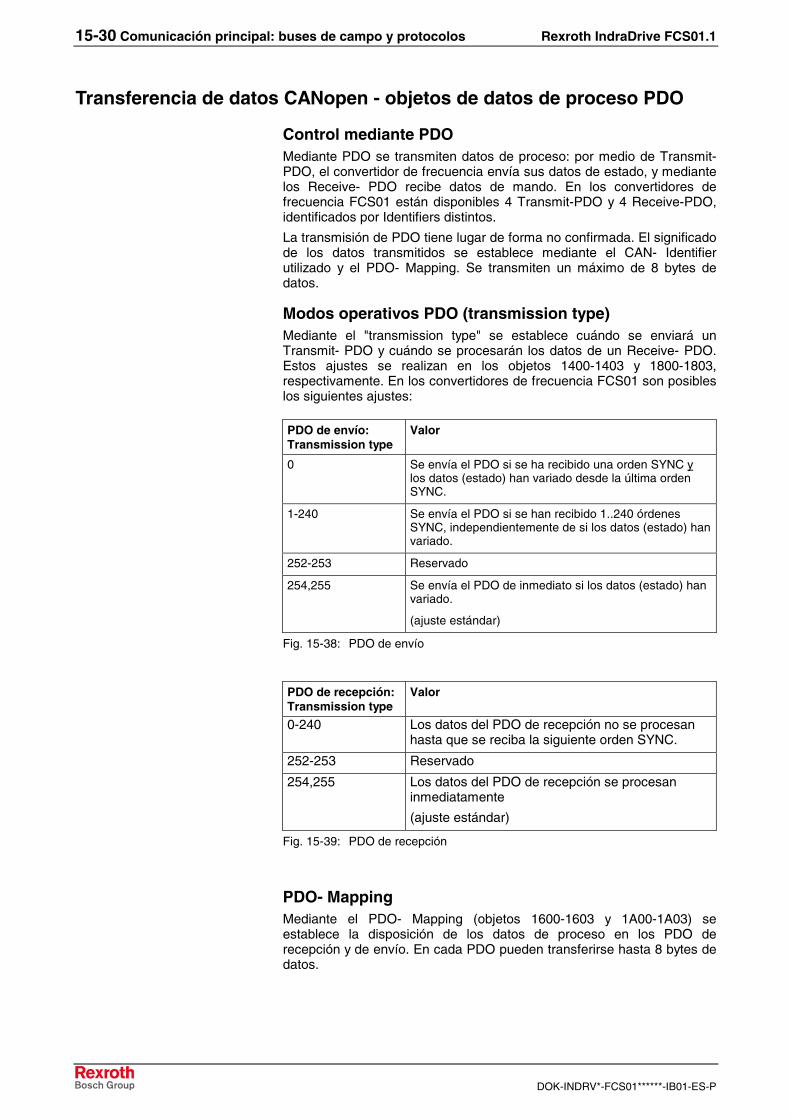
15-30 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Transferencia de datos CANopen - objetos de datos de proceso PDO
Control mediante PDO Mediante PDO se transmiten datos de proceso: por medio de Transmit- PDO, el convertidor de frecuencia envía sus datos de estado, y mediante los Receive- PDO recibe datos de mando. En los convertidores de frecuencia FCS01 están disponibles 4 Transmit-PDO y 4 Receive-PDO, identificados por Identifiers distintos.
La transmisión de PDO tiene lugar de forma no confirmada. El significado de los datos transmitidos se establece mediante el CAN- Identifier utilizado y el PDO- Mapping. Se transmiten un máximo de 8 bytes de datos.
Modos operativos PDO (transmission type) Mediante el "transmission type" se establece cuándo se enviará un Transmit- PDO y cuándo se procesarán los datos de un Receive- PDO. Estos ajustes se realizan en los objetos 1400-1403 y 1800-1803, respectivamente. En los convertidores de frecuencia FCS01 son posibles los siguientes ajustes:
PDO de envío: Transmission type
Valor
0 Se envía el PDO si se ha recibido una orden SYNC y los datos (estado) han variado desde la última orden SYNC.
1-240 Se envía el PDO si se han recibido 1..240 órdenes SYNC, independientemente de si los datos (estado) han variado.
252-253 Reservado
254,255 Se envía el PDO de inmediato si los datos (estado) han variado.
(ajuste estándar)
Fig. 15-38: PDO de envío
PDO de recepción:Transmission type
Valor
0-240 Los datos del PDO de recepción no se procesan hasta que se reciba la siguiente orden SYNC.
252-253 Reservado
254,255 Los datos del PDO de recepción se procesan inmediatamente
(ajuste estándar)
Fig. 15-39: PDO de recepción
PDO- Mapping Mediante el PDO- Mapping (objetos 1600-1603 y 1A00-1A03) se establece la disposición de los datos de proceso en los PDO de recepción y de envío. En cada PDO pueden transferirse hasta 8 bytes de datos.
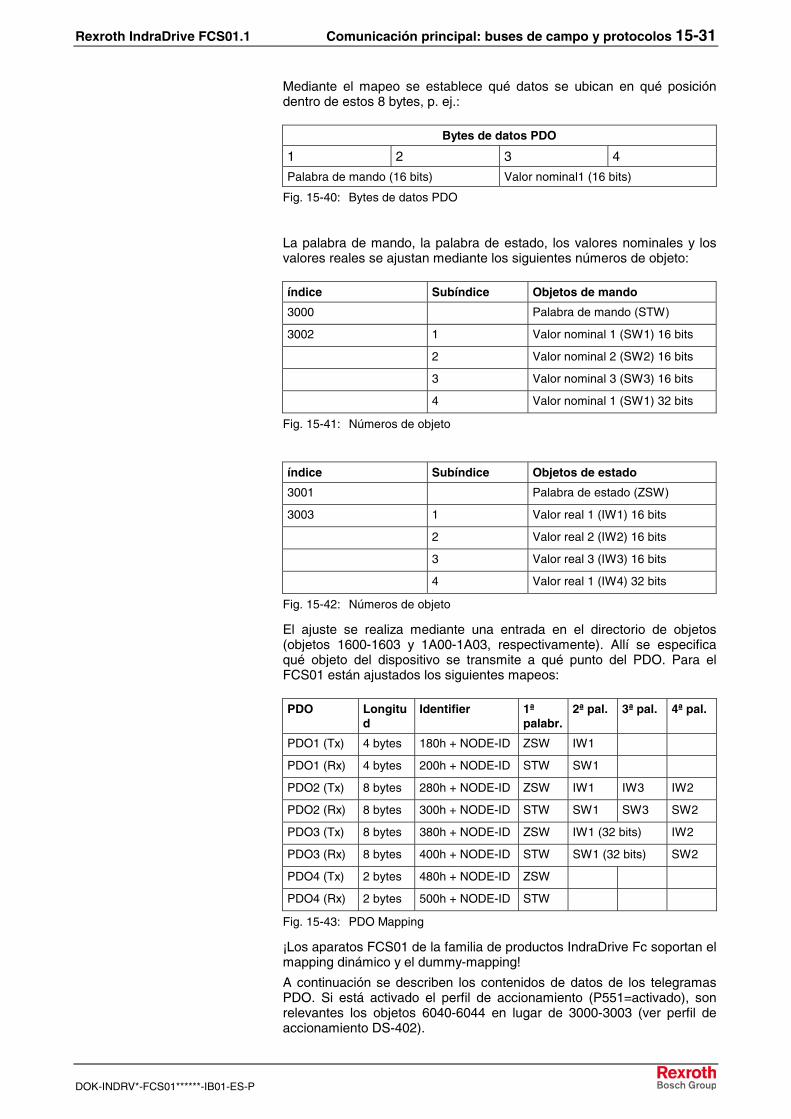
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-31
DOK-INDRV*-FCS01******-IB01-ES-P
Mediante el mapeo se establece qué datos se ubican en qué posición dentro de estos 8 bytes, p. ej.:
Bytes de datos PDO
1 2 3 4
Palabra de mando (16 bits) Valor nominal1 (16 bits)
Fig. 15-40: Bytes de datos PDO
La palabra de mando, la palabra de estado, los valores nominales y los valores reales se ajustan mediante los siguientes números de objeto:
índice Subíndice Objetos de mando
3000 Palabra de mando (STW)
3002 1 Valor nominal 1 (SW1) 16 bits
2 Valor nominal 2 (SW2) 16 bits
3 Valor nominal 3 (SW3) 16 bits
4 Valor nominal 1 (SW1) 32 bits
Fig. 15-41: Números de objeto
índice Subíndice Objetos de estado
3001 Palabra de estado (ZSW)
3003 1 Valor real 1 (IW1) 16 bits
2 Valor real 2 (IW2) 16 bits
3 Valor real 3 (IW3) 16 bits
4 Valor real 1 (IW4) 32 bits
Fig. 15-42: Números de objeto
El ajuste se realiza mediante una entrada en el directorio de objetos (objetos 1600-1603 y 1A00-1A03, respectivamente). Allí se especifica qué objeto del dispositivo se transmite a qué punto del PDO. Para el FCS01 están ajustados los siguientes mapeos:
PDO Longitud
Identifier 1ª palabr.
2ª pal. 3ª pal. 4ª pal.
PDO1 (Tx) 4 bytes 180h + NODE-ID ZSW IW1
PDO1 (Rx) 4 bytes 200h + NODE-ID STW SW1
PDO2 (Tx) 8 bytes 280h + NODE-ID ZSW IW1 IW3 IW2
PDO2 (Rx) 8 bytes 300h + NODE-ID STW SW1 SW3 SW2
PDO3 (Tx) 8 bytes 380h + NODE-ID ZSW IW1 (32 bits) IW2
PDO3 (Rx) 8 bytes 400h + NODE-ID STW SW1 (32 bits) SW2
PDO4 (Tx) 2 bytes 480h + NODE-ID ZSW
PDO4 (Rx) 2 bytes 500h + NODE-ID STW
Fig. 15-43: PDO Mapping
¡Los aparatos FCS01 de la familia de productos IndraDrive Fc soportan el mapping dinámico y el dummy-mapping!
A continuación se describen los contenidos de datos de los telegramas PDO. Si está activado el perfil de accionamiento (P551=activado), son relevantes los objetos 6040-6044 en lugar de 3000-3003 (ver perfil de accionamiento DS-402).
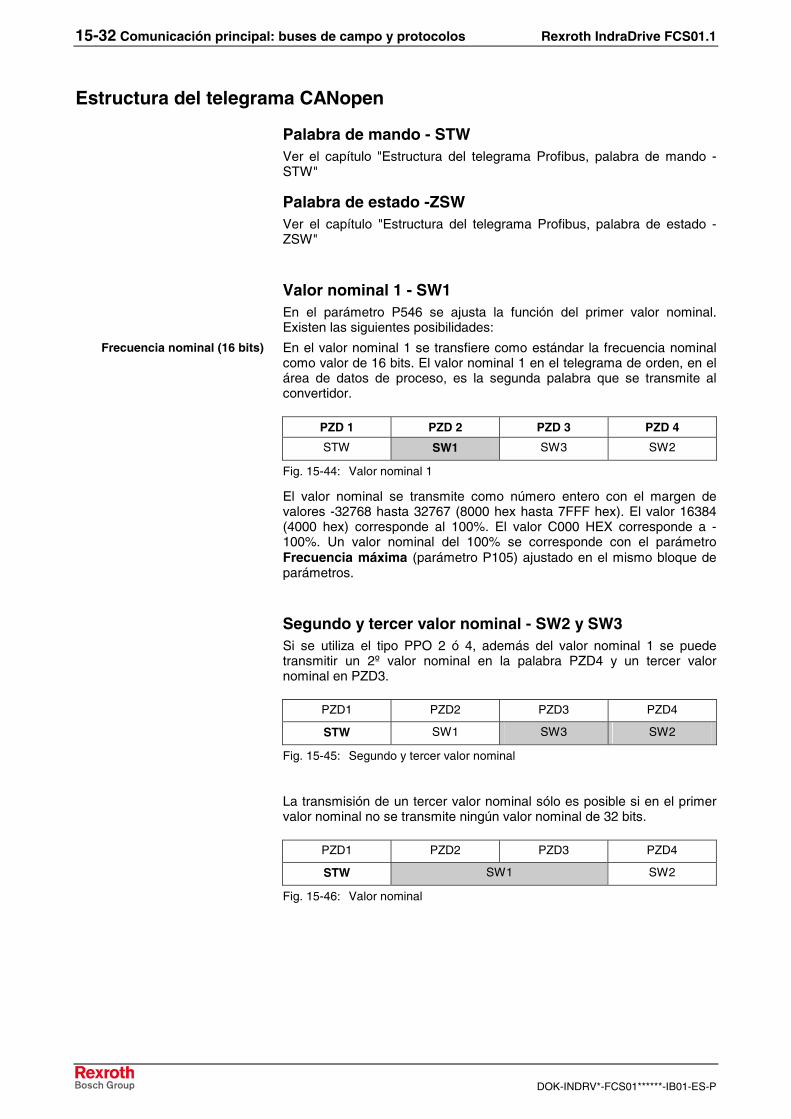
15-32 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Estructura del telegrama CANopen
Palabra de mando - STW Ver el capítulo "Estructura del telegrama Profibus, palabra de mando - STW"
Palabra de estado -ZSW Ver el capítulo "Estructura del telegrama Profibus, palabra de estado - ZSW"
Valor nominal 1 - SW1 En el parámetro P546 se ajusta la función del primer valor nominal. Existen las siguientes posibilidades:
En el valor nominal 1 se transfiere como estándar la frecuencia nominal como valor de 16 bits. El valor nominal 1 en el telegrama de orden, en el área de datos de proceso, es la segunda palabra que se transmite al convertidor.
PZD 1 PZD 2 PZD 3 PZD 4
STW SW1 SW3 SW2
Fig. 15-44: Valor nominal 1
El valor nominal se transmite como número entero con el margen de valores -32768 hasta 32767 (8000 hex hasta 7FFF hex). El valor 16384 (4000 hex) corresponde al 100%. El valor C000 HEX corresponde a -100%. Un valor nominal del 100% se corresponde con el parámetro Frecuencia máxima (parámetro P105) ajustado en el mismo bloque de parámetros.
Segundo y tercer valor nominal - SW2 y SW3 Si se utiliza el tipo PPO 2 ó 4, además del valor nominal 1 se puede transmitir un 2º valor nominal en la palabra PZD4 y un tercer valor nominal en PZD3.
PZD1 PZD2 PZD3 PZD4
STW SW1 SW3 SW2
Fig. 15-45: Segundo y tercer valor nominal
La transmisión de un tercer valor nominal sólo es posible si en el primer valor nominal no se transmite ningún valor nominal de 32 bits.
PZD1 PZD2 PZD3 PZD4
STW SW1 SW2
Fig. 15-46: Valor nominal
Frecuencia nominal (16 bits)
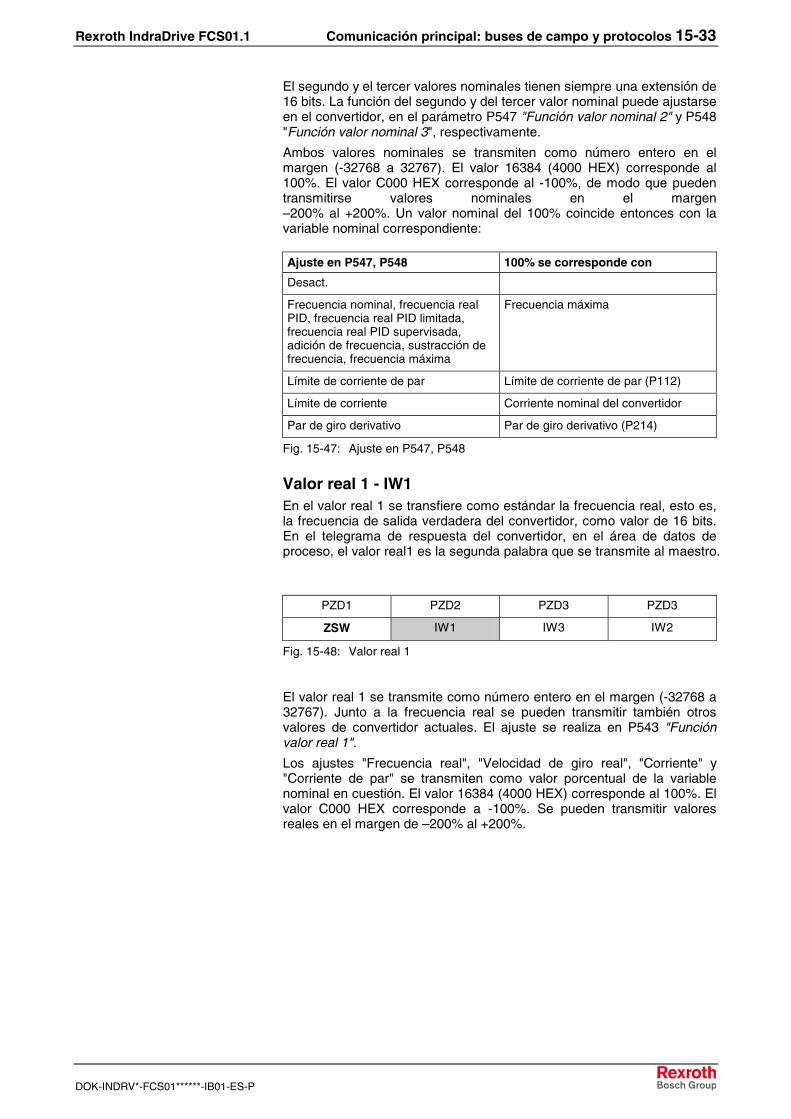
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-33
DOK-INDRV*-FCS01******-IB01-ES-P
El segundo y el tercer valores nominales tienen siempre una extensión de 16 bits. La función del segundo y del tercer valor nominal puede ajustarse en el convertidor, en el parámetro P547 "Función valor nominal 2" y P548 "Función valor nominal 3", respectivamente.
Ambos valores nominales se transmiten como número entero en el margen (-32768 a 32767). El valor 16384 (4000 HEX) corresponde al 100%. El valor C000 HEX corresponde al -100%, de modo que pueden transmitirse valores nominales en el margen –200% al +200%. Un valor nominal del 100% coincide entonces con la variable nominal correspondiente:
Ajuste en P547, P548 100% se corresponde con
Desact.
Frecuencia nominal, frecuencia real PID, frecuencia real PID limitada, frecuencia real PID supervisada, adición de frecuencia, sustracción de frecuencia, frecuencia máxima
Frecuencia máxima
Límite de corriente de par Límite de corriente de par (P112)
Límite de corriente Corriente nominal del convertidor
Par de giro derivativo Par de giro derivativo (P214)
Fig. 15-47: Ajuste en P547, P548
Valor real 1 - IW1 En el valor real 1 se transfiere como estándar la frecuencia real, esto es, la frecuencia de salida verdadera del convertidor, como valor de 16 bits. En el telegrama de respuesta del convertidor, en el área de datos de proceso, el valor real1 es la segunda palabra que se transmite al maestro.
PZD1 PZD2 PZD3 PZD3
ZSW IW1 IW3 IW2
Fig. 15-48: Valor real 1
El valor real 1 se transmite como número entero en el margen (-32768 a 32767). Junto a la frecuencia real se pueden transmitir también otros valores de convertidor actuales. El ajuste se realiza en P543 "Función valor real 1".
Los ajustes "Frecuencia real", "Velocidad de giro real", "Corriente" y "Corriente de par" se transmiten como valor porcentual de la variable nominal en cuestión. El valor 16384 (4000 HEX) corresponde al 100%. El valor C000 HEX corresponde a -100%. Se pueden transmitir valores reales en el margen de –200% al +200%.
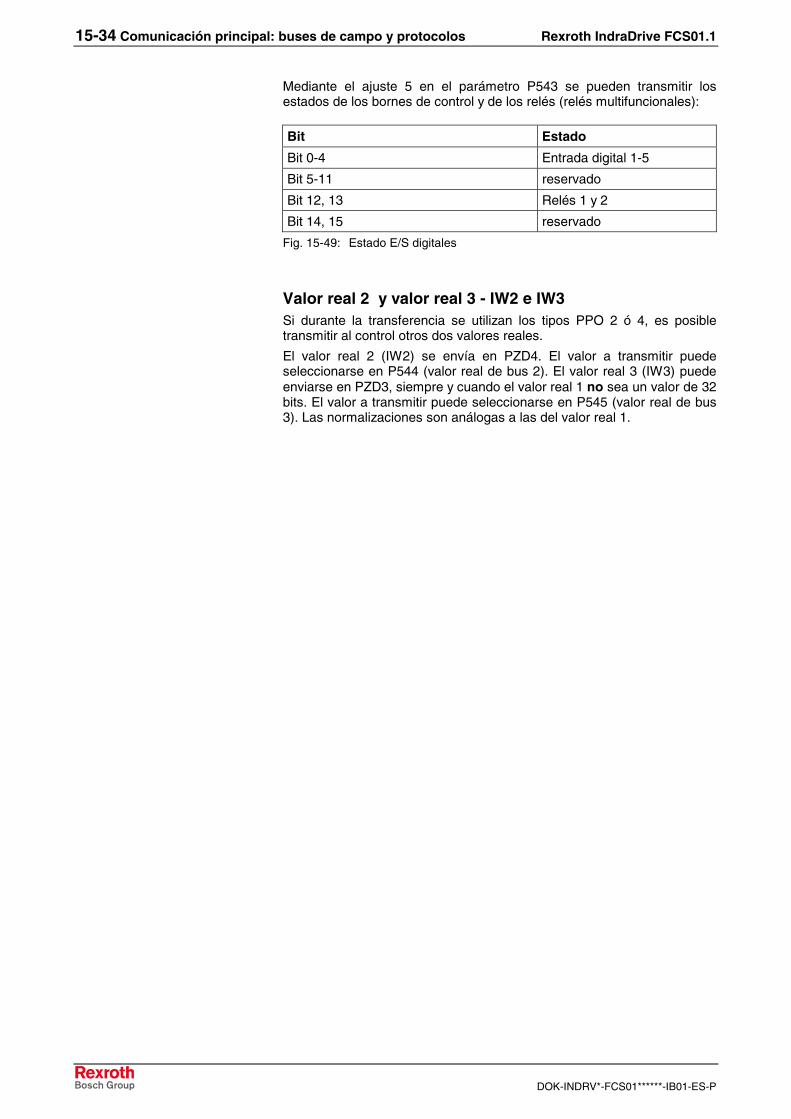
15-34 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Mediante el ajuste 5 en el parámetro P543 se pueden transmitir los estados de los bornes de control y de los relés (relés multifuncionales):
Bit Estado
Bit 0-4 Entrada digital 1-5
Bit 5-11 reservado
Bit 12, 13 Relés 1 y 2
Bit 14, 15 reservado
Fig. 15-49: Estado E/S digitales
Valor real 2 y valor real 3 - IW2 e IW3 Si durante la transferencia se utilizan los tipos PPO 2 ó 4, es posible transmitir al control otros dos valores reales.
El valor real 2 (IW2) se envía en PZD4. El valor a transmitir puede seleccionarse en P544 (valor real de bus 2). El valor real 3 (IW3) puede enviarse en PZD3, siempre y cuando el valor real 1 no sea un valor de 32 bits. El valor a transmitir puede seleccionarse en P545 (valor real de bus 3). Las normalizaciones son análogas a las del valor real 1.
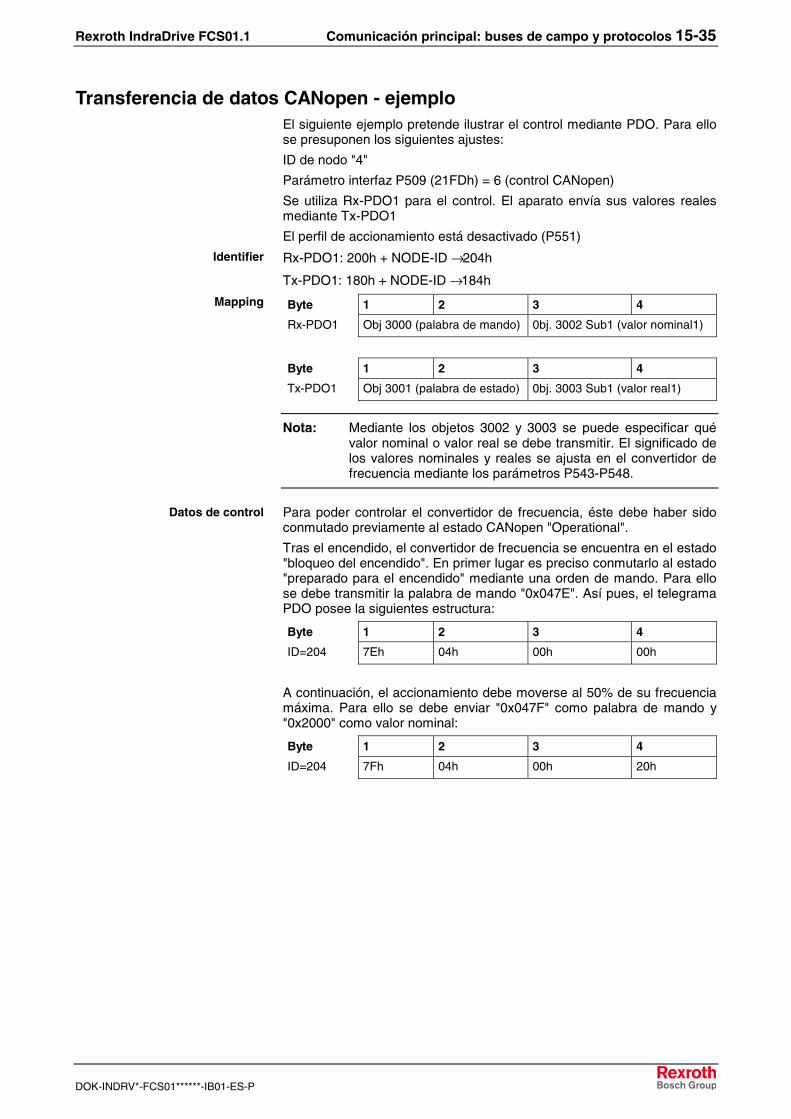
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-35
DOK-INDRV*-FCS01******-IB01-ES-P
Transferencia de datos CANopen - ejemplo El siguiente ejemplo pretende ilustrar el control mediante PDO. Para ello se presuponen los siguientes ajustes:
ID de nodo "4"
Parámetro interfaz P509 (21FDh) = 6 (control CANopen)
Se utiliza Rx-PDO1 para el control. El aparato envía sus valores reales mediante Tx-PDO1
El perfil de accionamiento está desactivado (P551)
Rx-PDO1: 200h + NODE-ID → 204h
Tx-PDO1: 180h + NODE-ID → 184h
Byte 1 2 3 4
Rx-PDO1 Obj 3000 (palabra de mando) 0bj. 3002 Sub1 (valor nominal1)
Byte 1 2 3 4
Tx-PDO1 Obj 3001 (palabra de estado) 0bj. 3003 Sub1 (valor real1)
Nota: Mediante los objetos 3002 y 3003 se puede especificar qué valor nominal o valor real se debe transmitir. El significado de los valores nominales y reales se ajusta en el convertidor de frecuencia mediante los parámetros P543-P548.
Para poder controlar el convertidor de frecuencia, éste debe haber sido conmutado previamente al estado CANopen "Operational".
Tras el encendido, el convertidor de frecuencia se encuentra en el estado "bloqueo del encendido". En primer lugar es preciso conmutarlo al estado "preparado para el encendido" mediante una orden de mando. Para ello se debe transmitir la palabra de mando "0x047E". Así pues, el telegrama PDO posee la siguientes estructura:
Byte 1 2 3 4
ID=204 7Eh 04h 00h 00h
A continuación, el accionamiento debe moverse al 50% de su frecuencia máxima. Para ello se debe enviar "0x047F" como palabra de mando y "0x2000" como valor nominal:
Byte 1 2 3 4
ID=204 7Fh 04h 00h 20h
Identifier
Mapping
Datos de control
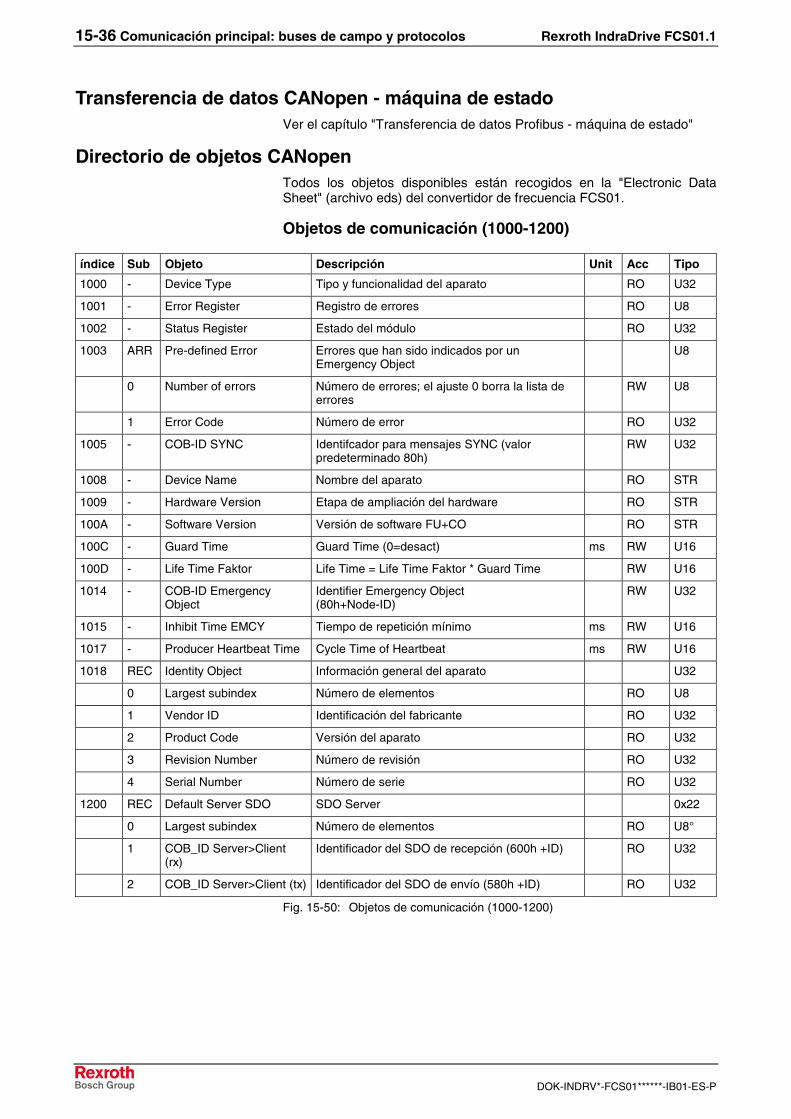
15-36 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Transferencia de datos CANopen - máquina de estado Ver el capítulo "Transferencia de datos Profibus - máquina de estado"
Directorio de objetos CANopen Todos los objetos disponibles están recogidos en la "Electronic Data Sheet" (archivo eds) del convertidor de frecuencia FCS01.
Objetos de comunicación (1000-1200)
índice Sub Objeto Descripción Unit Acc Tipo
1000 - Device Type Tipo y funcionalidad del aparato RO U32
1001 - Error Register Registro de errores RO U8
1002 - Status Register Estado del módulo RO U32
1003 ARR Pre-defined Error Errores que han sido indicados por un Emergency Object
U8
0 Number of errors Número de errores; el ajuste 0 borra la lista de errores
RW U8
1 Error Code Número de error RO U32
1005 - COB-ID SYNC Identifcador para mensajes SYNC (valor predeterminado 80h)
RW U32
1008 - Device Name Nombre del aparato RO STR
1009 - Hardware Version Etapa de ampliación del hardware RO STR
100A - Software Version Versión de software FU+CO RO STR
100C - Guard Time Guard Time (0=desact) ms RW U16
100D - Life Time Faktor Life Time = Life Time Faktor * Guard Time RW U16
1014 - COB-ID Emergency Object
Identifier Emergency Object (80h+Node-ID)
RW U32
1015 - Inhibit Time EMCY Tiempo de repetición mínimo ms RW U16
1017 - Producer Heartbeat Time Cycle Time of Heartbeat ms RW U16
1018 REC Identity Object Información general del aparato U32
0 Largest subindex Número de elementos RO U8
1 Vendor ID Identificación del fabricante RO U32
2 Product Code Versión del aparato RO U32
3 Revision Number Número de revisión RO U32
4 Serial Number Número de serie RO U32
1200 REC Default Server SDO SDO Server 0x22
0 Largest subindex Número de elementos RO U8°
1 COB_ID Server>Client (rx)
Identificador del SDO de recepción (600h +ID) RO U32
2 COB_ID Server>Client (tx) Identificador del SDO de envío (580h +ID) RO U32
Fig. 15-50: Objetos de comunicación (1000-1200)
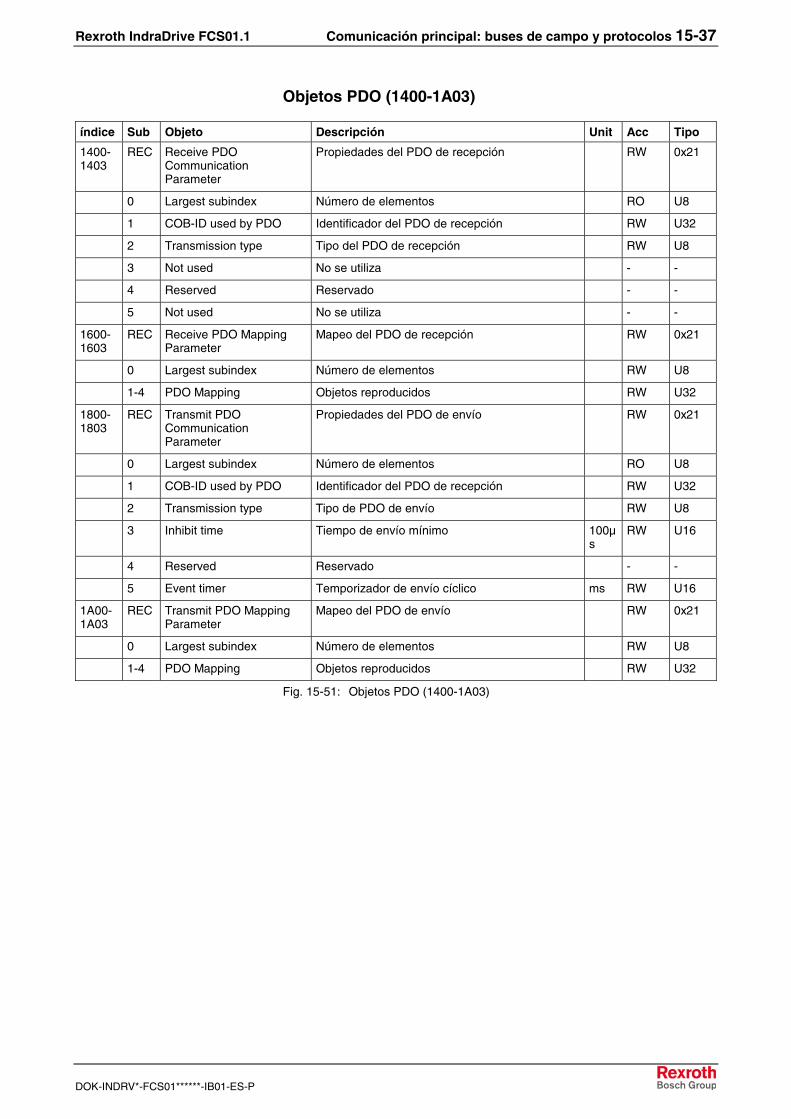
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-37
DOK-INDRV*-FCS01******-IB01-ES-P
Objetos PDO (1400-1A03)
índice Sub Objeto Descripción Unit Acc Tipo
1400-1403
REC Receive PDO Communication Parameter
Propiedades del PDO de recepción RW 0x21
0 Largest subindex Número de elementos RO U8
1 COB-ID used by PDO Identificador del PDO de recepción RW U32
2 Transmission type Tipo del PDO de recepción RW U8
3 Not used No se utiliza - -
4 Reserved Reservado - -
5 Not used No se utiliza - -
1600-1603
REC Receive PDO Mapping Parameter
Mapeo del PDO de recepción RW 0x21
0 Largest subindex Número de elementos RW U8
1-4 PDO Mapping Objetos reproducidos RW U32
1800-1803
REC Transmit PDO Communication Parameter
Propiedades del PDO de envío RW 0x21
0 Largest subindex Número de elementos RO U8
1 COB-ID used by PDO Identificador del PDO de recepción RW U32
2 Transmission type Tipo de PDO de envío RW U8
3 Inhibit time Tiempo de envío mínimo 100µs
RW U16
4 Reserved Reservado - -
5 Event timer Temporizador de envío cíclico ms RW U16
1A00-1A03
REC Transmit PDO Mapping Parameter
Mapeo del PDO de envío RW 0x21
0 Largest subindex Número de elementos RW U8
1-4 PDO Mapping Objetos reproducidos RW U32
Fig. 15-51: Objetos PDO (1400-1A03)
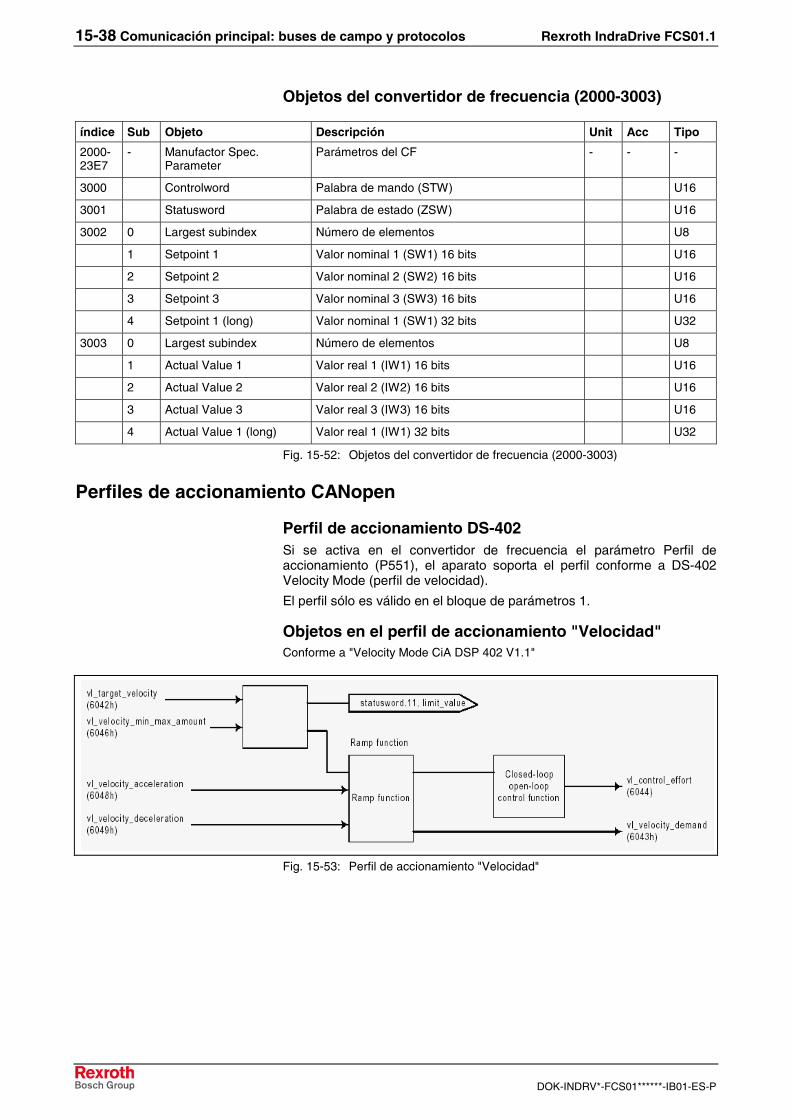
15-38 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Objetos del convertidor de frecuencia (2000-3003)
índice Sub Objeto Descripción Unit Acc Tipo
2000-23E7
- Manufactor Spec. Parameter
Parámetros del CF - - -
3000 Controlword Palabra de mando (STW) U16
3001 Statusword Palabra de estado (ZSW) U16
3002 0 Largest subindex Número de elementos U8
1 Setpoint 1 Valor nominal 1 (SW1) 16 bits U16
2 Setpoint 2 Valor nominal 2 (SW2) 16 bits U16
3 Setpoint 3 Valor nominal 3 (SW3) 16 bits U16
4 Setpoint 1 (long) Valor nominal 1 (SW1) 32 bits U32
3003 0 Largest subindex Número de elementos U8
1 Actual Value 1 Valor real 1 (IW1) 16 bits U16
2 Actual Value 2 Valor real 2 (IW2) 16 bits U16
3 Actual Value 3 Valor real 3 (IW3) 16 bits U16
4 Actual Value 1 (long) Valor real 1 (IW1) 32 bits U32
Fig. 15-52: Objetos del convertidor de frecuencia (2000-3003)
Perfiles de accionamiento CANopen
Perfil de accionamiento DS-402 Si se activa en el convertidor de frecuencia el parámetro Perfil de accionamiento (P551), el aparato soporta el perfil conforme a DS-402 Velocity Mode (perfil de velocidad).
El perfil sólo es válido en el bloque de parámetros 1.
Objetos en el perfil de accionamiento "Velocidad"
Conforme a "Velocity Mode CiA DSP 402 V1.1"
Fig. 15-53: Perfil de accionamiento "Velocidad"
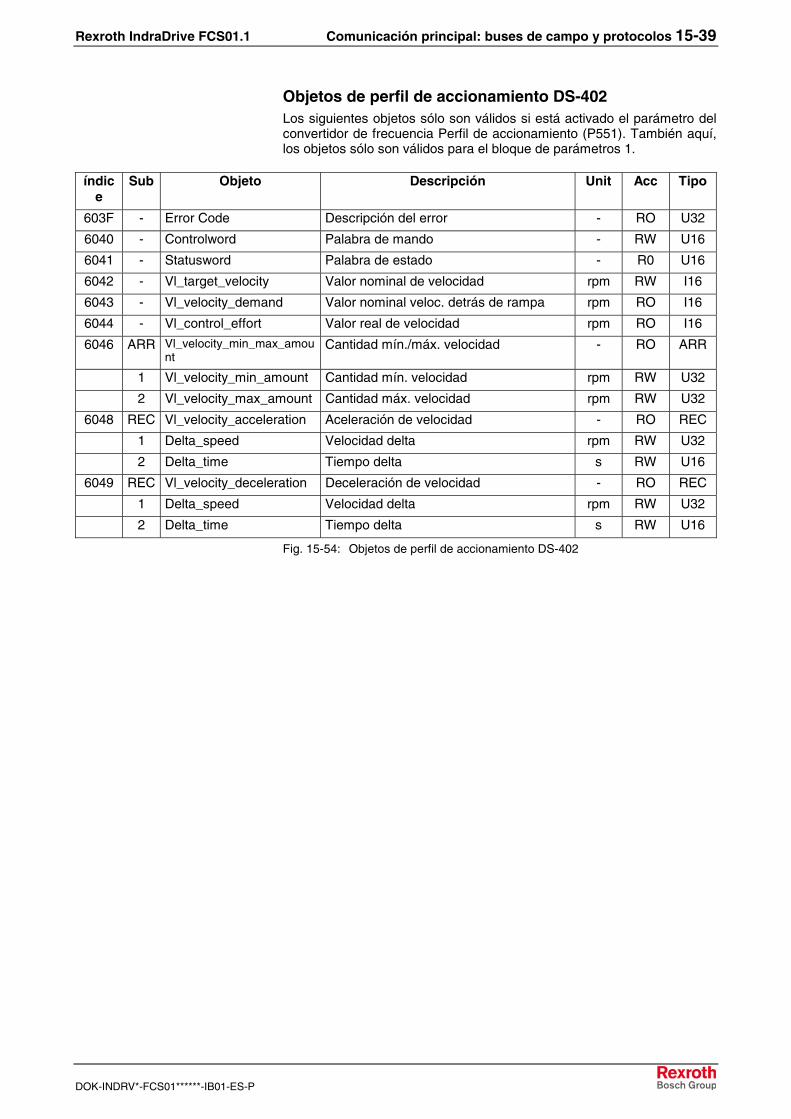
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-39
DOK-INDRV*-FCS01******-IB01-ES-P
Objetos de perfil de accionamiento DS-402 Los siguientes objetos sólo son válidos si está activado el parámetro del convertidor de frecuencia Perfil de accionamiento (P551). También aquí, los objetos sólo son válidos para el bloque de parámetros 1.
índice
Sub Objeto Descripción Unit Acc Tipo
603F - Error Code Descripción del error - RO U32
6040 - Controlword Palabra de mando - RW U16
6041 - Statusword Palabra de estado - R0 U16
6042 - Vl_target_velocity Valor nominal de velocidad rpm RW I16
6043 - Vl_velocity_demand Valor nominal veloc. detrás de rampa rpm RO I16
6044 - Vl_control_effort Valor real de velocidad rpm RO I16
6046 ARR Vl_velocity_min_max_amount
Cantidad mín./máx. velocidad - RO ARR
1 Vl_velocity_min_amount Cantidad mín. velocidad rpm RW U32
2 Vl_velocity_max_amount Cantidad máx. velocidad rpm RW U32
6048 REC Vl_velocity_acceleration Aceleración de velocidad - RO REC
1 Delta_speed Velocidad delta rpm RW U32
2 Delta_time Tiempo delta s RW U16
6049 REC Vl_velocity_deceleration Deceleración de velocidad - RO REC
1 Delta_speed Velocidad delta rpm RW U32
2 Delta_time Tiempo delta s RW U16
Fig. 15-54: Objetos de perfil de accionamiento DS-402
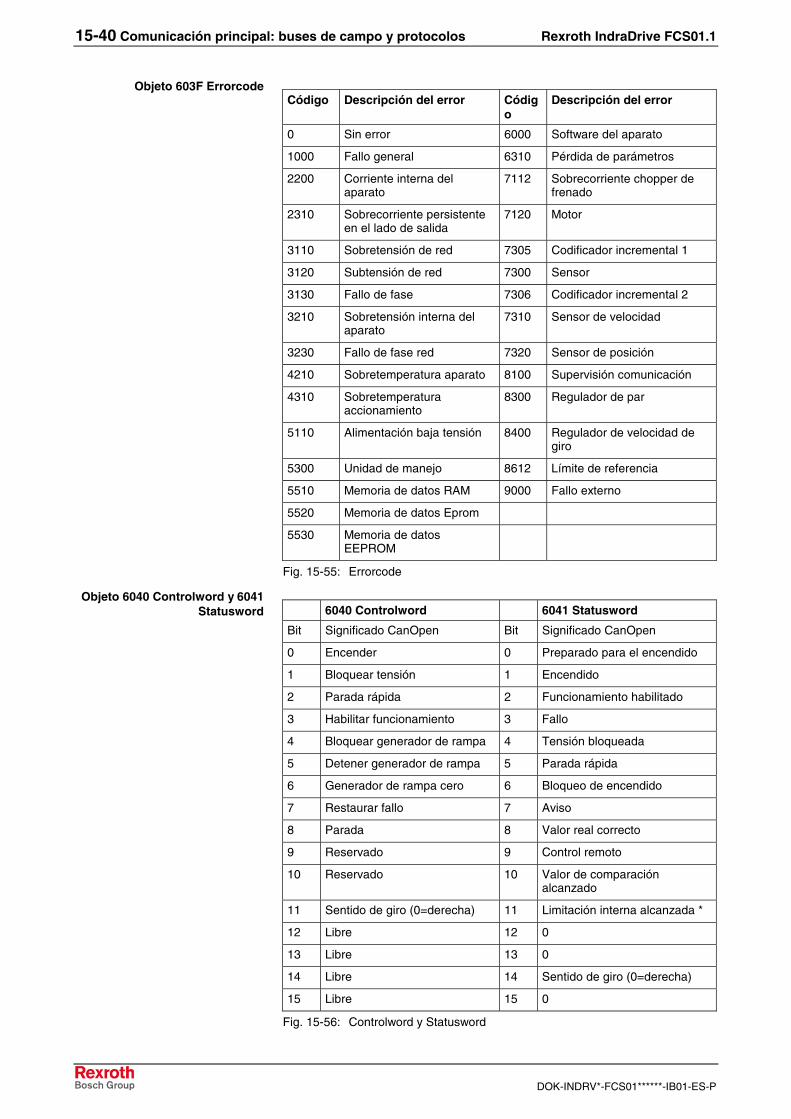
15-40 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Código Descripción del error Código
Descripción del error
0 Sin error 6000 Software del aparato
1000 Fallo general 6310 Pérdida de parámetros
2200 Corriente interna del aparato
7112 Sobrecorriente chopper de frenado
2310 Sobrecorriente persistente en el lado de salida
7120 Motor
3110 Sobretensión de red 7305 Codificador incremental 1
3120 Subtensión de red 7300 Sensor
3130 Fallo de fase 7306 Codificador incremental 2
3210 Sobretensión interna del aparato
7310 Sensor de velocidad
3230 Fallo de fase red 7320 Sensor de posición
4210 Sobretemperatura aparato 8100 Supervisión comunicación
4310 Sobretemperatura accionamiento
8300 Regulador de par
5110 Alimentación baja tensión 8400 Regulador de velocidad de giro
5300 Unidad de manejo 8612 Límite de referencia
5510 Memoria de datos RAM 9000 Fallo externo
5520 Memoria de datos Eprom
5530 Memoria de datos EEPROM
Fig. 15-55: Errorcode
6040 Controlword 6041 Statusword
Bit Significado CanOpen Bit Significado CanOpen
0 Encender 0 Preparado para el encendido
1 Bloquear tensión 1 Encendido
2 Parada rápida 2 Funcionamiento habilitado
3 Habilitar funcionamiento 3 Fallo
4 Bloquear generador de rampa 4 Tensión bloqueada
5 Detener generador de rampa 5 Parada rápida
6 Generador de rampa cero 6 Bloqueo de encendido
7 Restaurar fallo 7 Aviso
8 Parada 8 Valor real correcto
9 Reservado 9 Control remoto
10 Reservado 10 Valor de comparación alcanzado
11 Sentido de giro (0=derecha) 11 Limitación interna alcanzada *
12 Libre 12 0
13 Libre 13 0
14 Libre 14 Sentido de giro (0=derecha)
15 Libre 15 0
Fig. 15-56: Controlword y Statusword
Objeto 603F Errorcode
Objeto 6040 Controlword y 6041 Statusword
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-41
DOK-INDRV*-FCS01******-IB01-ES-P
15.4 Protocolo de interfaz en serie universal - USS
Uso y aplicación El protocolo de interfaz en serie universal USS de la serie de aparatos FCS01 sirve para controlar y parametrizar los convertidores mediante una interfaz en serie asíncrona.
Para establecer una comunicación (punto a punto) a través del protocolo USS, se utiliza la interfaz RS-485 situada en la parte superior del aparato.
Utilizando el programa de control y puesta en servicio DriveTop Fc se puede realizar, por medio de un PC, la puesta en servicio de los aparatos.
Protocolo USS Mediante el protocolo USS; un usuario puede establecer una conexión de bus en serie entre un sistema maestro y varios sistemas esclavos. Los sistemas maestros pueden ser p. ej. controles lógicos programables (PLC) o PC.
El protocolo USS ofrece al usuario la posibilidad de implementar tanto tareas de automatización con exigencia de un tráfico de telegramas cíclico (⇒ es necesaria una longitud de telegrama fija) como tareas de visualización.
El protocolo USS es un protocolo sencillo de transmisión en serie definido por Siemens, concebido para satisfacer las necesidades de la técnica de accionamiento.
• Método de acceso maestro-esclavo
• Sistema de maestro único
• Marco de telegramas sencillo y seguro
• Interfaz de datos con el dispositivo básico como en los accionamientos con velocidad de giro variable PROFIL, es decir, las informaciones para el accionamiento pueden transmitirse a través del protocolo USS de la misma forma que en el PROFIBUS-DP.
• Aplicable para la puesta en servicio, el mantenimiento y la automatización
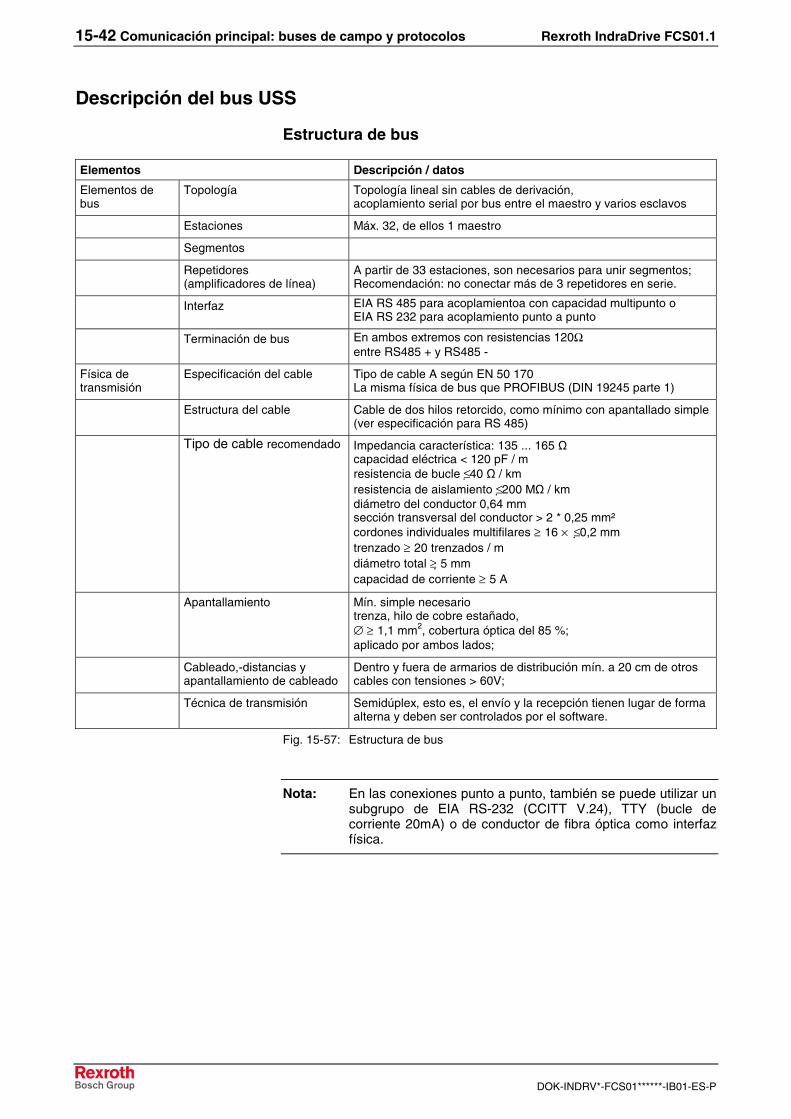
15-42 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Descripción del bus USS
Estructura de bus
Elementos Descripción / datos
Elementos de bus
Topología Topología lineal sin cables de derivación, acoplamiento serial por bus entre el maestro y varios esclavos
Estaciones Máx. 32, de ellos 1 maestro
Segmentos
Repetidores (amplificadores de línea)
A partir de 33 estaciones, son necesarios para unir segmentos; Recomendación: no conectar más de 3 repetidores en serie.
Interfaz EIA RS 485 para acoplamientoa con capacidad multipunto o EIA RS 232 para acoplamiento punto a punto
Terminación de bus En ambos extremos con resistencias 120Ω entre RS485 + y RS485 -
Física de transmisión
Especificación del cable Tipo de cable A según EN 50 170 La misma física de bus que PROFIBUS (DIN 19245 parte 1)
Estructura del cable Cable de dos hilos retorcido, como mínimo con apantallado simple (ver especificación para RS 485)
Tipo de cable recomendado Impedancia característica: 135 ... 165 Ω capacidad eléctrica < 120 pF / m resistencia de bucle ≤ 40 Ω / km resistencia de aislamiento ≤ 200 MΩ / km diámetro del conductor 0,64 mm sección transversal del conductor > 2 * 0,25 mm² cordones individuales multifilares ≥ 16 × ≤ 0,2 mm trenzado ≥ 20 trenzados / m diámetro total ≥ 5 mm capacidad de corriente ≥ 5 A
Apantallamiento Mín. simple necesario trenza, hilo de cobre estañado, ∅ ≥ 1,1 mm2, cobertura óptica del 85 %; aplicado por ambos lados;
Cableado,-distancias y apantallamiento de cableado
Dentro y fuera de armarios de distribución mín. a 20 cm de otros cables con tensiones > 60V;
Técnica de transmisión Semidúplex, esto es, el envío y la recepción tienen lugar de forma alterna y deben ser controlados por el software.
Fig. 15-57: Estructura de bus
Nota: En las conexiones punto a punto, también se puede utilizar un subgrupo de EIA RS-232 (CCITT V.24), TTY (bucle de corriente 20mA) o de conductor de fibra óptica como interfaz física.
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-43
DOK-INDRV*-FCS01******-IB01-ES-P
Velocidad de transmisión La longitud máxima del cable, y por ende la distancia máxima entre el maestro y el último esclavo, está limitada por las propiedades del cable, las condiciones ambientales y la tasa de transmisión.
[EIA Standard RS-422-A diciembre 1978, Apéndice, página 14]
Velocidad de transmisión [kbit / s]
Longitud máx. del cable [m]
< 100 1200
Fig. 15-58: Velocidad de transmisión
Nota: Sólo si se respetan los parámetros de cable especificados se pueden mantener sin problemas las velocidades de transmisión y las distancias de transmisión garantizadas.
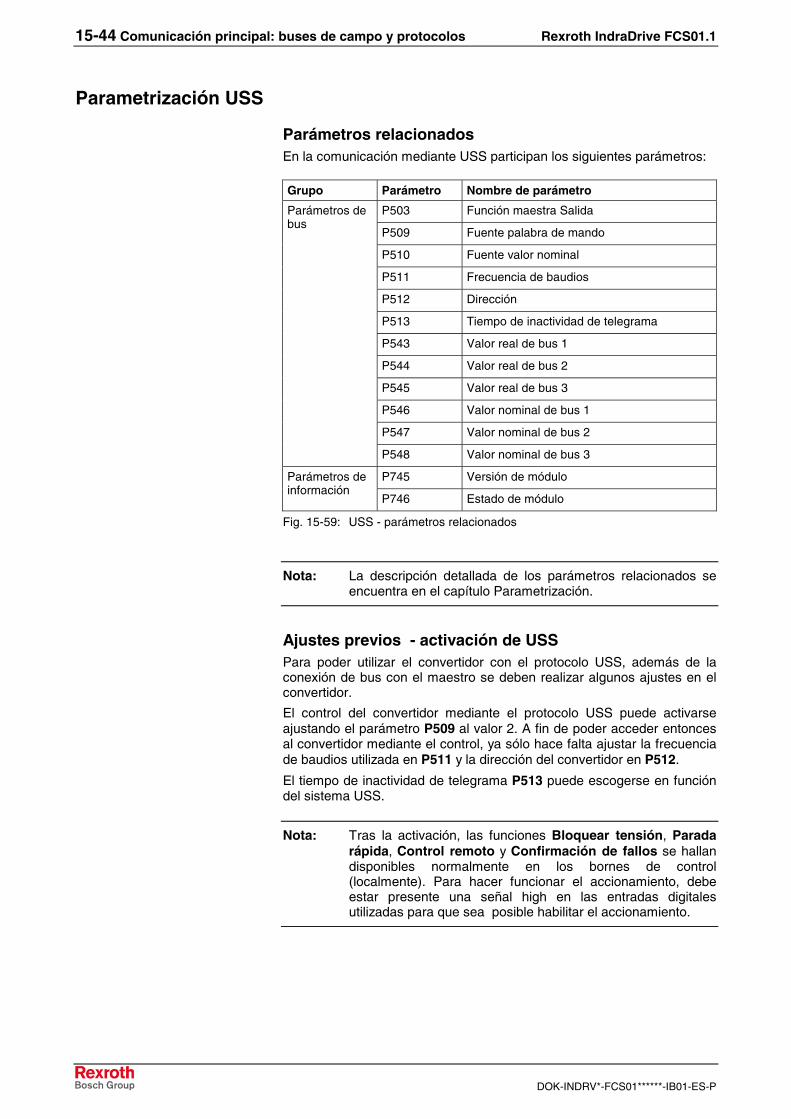
15-44 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Parametrización USS
Parámetros relacionados En la comunicación mediante USS participan los siguientes parámetros:
Grupo Parámetro Nombre de parámetro
P503 Función maestra Salida
P509 Fuente palabra de mando
P510 Fuente valor nominal
P511 Frecuencia de baudios
P512 Dirección
P513 Tiempo de inactividad de telegrama
P543 Valor real de bus 1
P544 Valor real de bus 2
P545 Valor real de bus 3
P546 Valor nominal de bus 1
P547 Valor nominal de bus 2
Parámetros de bus
P548 Valor nominal de bus 3
P745 Versión de módulo Parámetros de información
P746 Estado de módulo
Fig. 15-59: USS - parámetros relacionados
Nota: La descripción detallada de los parámetros relacionados se encuentra en el capítulo Parametrización.
Ajustes previos - activación de USS Para poder utilizar el convertidor con el protocolo USS, además de la conexión de bus con el maestro se deben realizar algunos ajustes en el convertidor.
El control del convertidor mediante el protocolo USS puede activarse ajustando el parámetro P509 al valor 2. A fin de poder acceder entonces al convertidor mediante el control, ya sólo hace falta ajustar la frecuencia de baudios utilizada en P511 y la dirección del convertidor en P512.
El tiempo de inactividad de telegrama P513 puede escogerse en función del sistema USS.
Nota: Tras la activación, las funciones Bloquear tensión, Parada rápida, Control remoto y Confirmación de fallos se hallan disponibles normalmente en los bornes de control (localmente). Para hacer funcionar el accionamiento, debe estar presente una señal high en las entradas digitales utilizadas para que sea posible habilitar el accionamiento.
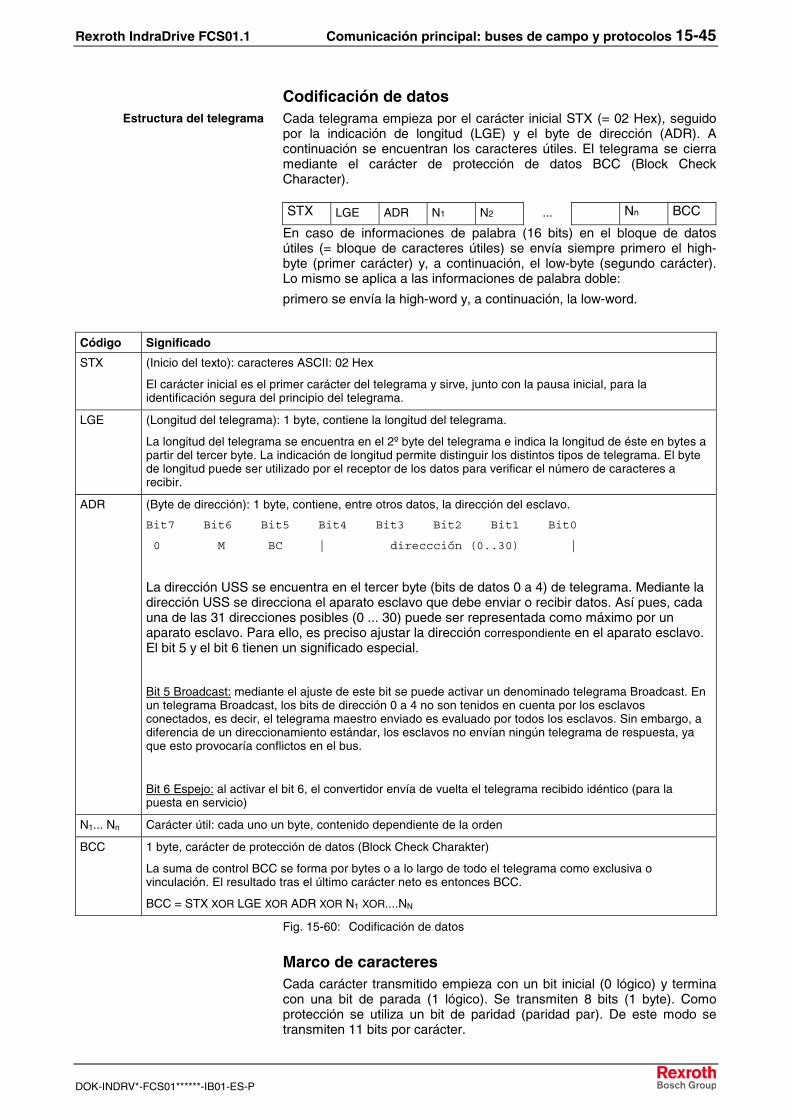
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-45
DOK-INDRV*-FCS01******-IB01-ES-P
Codificación de datos Cada telegrama empieza por el carácter inicial STX (= 02 Hex), seguido por la indicación de longitud (LGE) y el byte de dirección (ADR). A continuación se encuentran los caracteres útiles. El telegrama se cierra mediante el carácter de protección de datos BCC (Block Check Character). STX LGE ADR N1 N2 ... Nn BCC
En caso de informaciones de palabra (16 bits) en el bloque de datos útiles (= bloque de caracteres útiles) se envía siempre primero el high-byte (primer carácter) y, a continuación, el low-byte (segundo carácter). Lo mismo se aplica a las informaciones de palabra doble:
primero se envía la high-word y, a continuación, la low-word.
Código Significado
STX (Inicio del texto): caracteres ASCII: 02 Hex
El carácter inicial es el primer carácter del telegrama y sirve, junto con la pausa inicial, para la identificación segura del principio del telegrama.
LGE (Longitud del telegrama): 1 byte, contiene la longitud del telegrama.
La longitud del telegrama se encuentra en el 2º byte del telegrama e indica la longitud de éste en bytes a partir del tercer byte. La indicación de longitud permite distinguir los distintos tipos de telegrama. El byte de longitud puede ser utilizado por el receptor de los datos para verificar el número de caracteres a recibir.
ADR (Byte de dirección): 1 byte, contiene, entre otros datos, la dirección del esclavo.
Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
0 M BC | direccción (0..30) |
La dirección USS se encuentra en el tercer byte (bits de datos 0 a 4) de telegrama. Mediante la dirección USS se direcciona el aparato esclavo que debe enviar o recibir datos. Así pues, cada una de las 31 direcciones posibles (0 ... 30) puede ser representada como máximo por un aparato esclavo. Para ello, es preciso ajustar la dirección correspondiente en el aparato esclavo. El bit 5 y el bit 6 tienen un significado especial.
Bit 5 Broadcast: mediante el ajuste de este bit se puede activar un denominado telegrama Broadcast. En un telegrama Broadcast, los bits de dirección 0 a 4 no son tenidos en cuenta por los esclavos conectados, es decir, el telegrama maestro enviado es evaluado por todos los esclavos. Sin embargo, a diferencia de un direccionamiento estándar, los esclavos no envían ningún telegrama de respuesta, ya que esto provocaría conflictos en el bus.
Bit 6 Espejo: al activar el bit 6, el convertidor envía de vuelta el telegrama recibido idéntico (para la puesta en servicio)
N1... Nn Carácter útil: cada uno un byte, contenido dependiente de la orden
BCC 1 byte, carácter de protección de datos (Block Check Charakter)
La suma de control BCC se forma por bytes o a lo largo de todo el telegrama como exclusiva o vinculación. El resultado tras el último carácter neto es entonces BCC.
BCC = STX XOR LGE XOR ADR XOR N1 XOR....NN
Fig. 15-60: Codificación de datos
Marco de caracteres Cada carácter transmitido empieza con un bit inicial (0 lógico) y termina con una bit de parada (1 lógico). Se transmiten 8 bits (1 byte). Como protección se utiliza un bit de paridad (paridad par). De este modo se transmiten 11 bits por carácter.
Estructura del telegrama
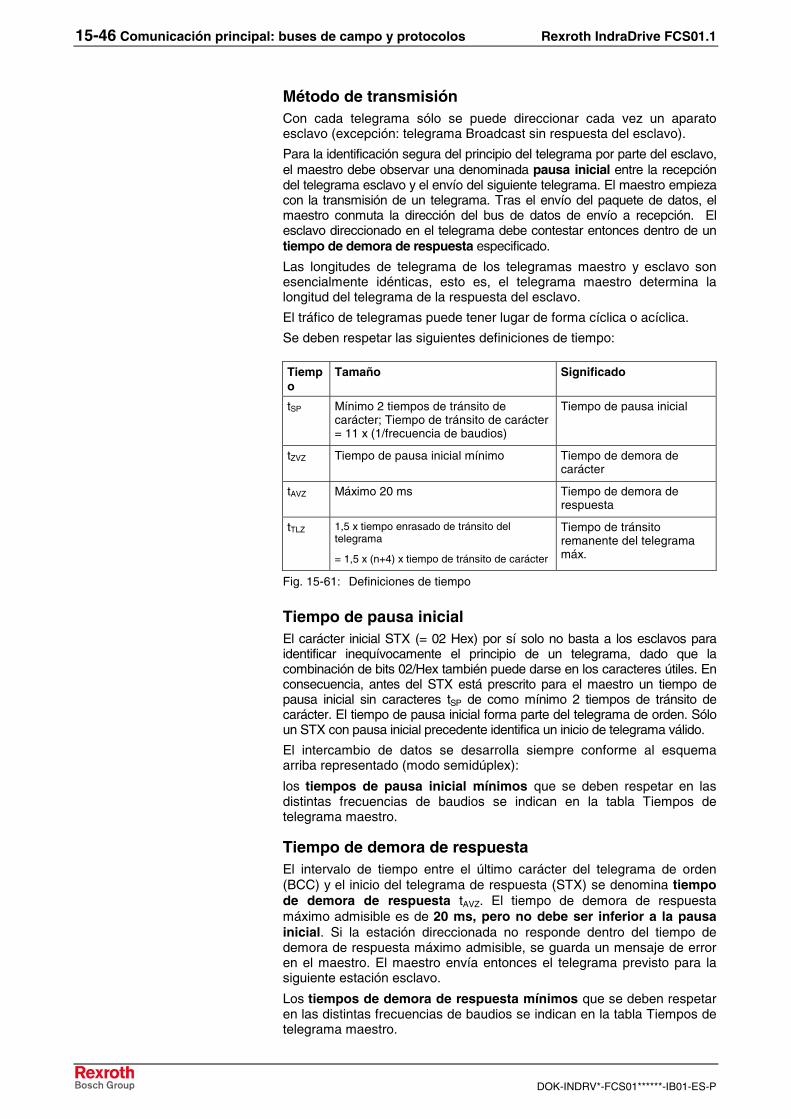
15-46 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Método de transmisión Con cada telegrama sólo se puede direccionar cada vez un aparato esclavo (excepción: telegrama Broadcast sin respuesta del esclavo).
Para la identificación segura del principio del telegrama por parte del esclavo, el maestro debe observar una denominada pausa inicial entre la recepción del telegrama esclavo y el envío del siguiente telegrama. El maestro empieza con la transmisión de un telegrama. Tras el envío del paquete de datos, el maestro conmuta la dirección del bus de datos de envío a recepción. El esclavo direccionado en el telegrama debe contestar entonces dentro de un tiempo de demora de respuesta especificado.
Las longitudes de telegrama de los telegramas maestro y esclavo son esencialmente idénticas, esto es, el telegrama maestro determina la longitud del telegrama de la respuesta del esclavo.
El tráfico de telegramas puede tener lugar de forma cíclica o acíclica.
Se deben respetar las siguientes definiciones de tiempo:
Tiempo
Tamaño Significado
tSP Mínimo 2 tiempos de tránsito de carácter; Tiempo de tránsito de carácter = 11 x (1/frecuencia de baudios)
Tiempo de pausa inicial
tZVZ Tiempo de pausa inicial mínimo Tiempo de demora de carácter
tAVZ Máximo 20 ms Tiempo de demora de respuesta
tTLZ 1,5 x tiempo enrasado de tránsito del telegrama
= 1,5 x (n+4) x tiempo de tránsito de carácter
Tiempo de tránsito remanente del telegrama máx.
Fig. 15-61: Definiciones de tiempo
Tiempo de pausa inicial El carácter inicial STX (= 02 Hex) por sí solo no basta a los esclavos para identificar inequívocamente el principio de un telegrama, dado que la combinación de bits 02/Hex también puede darse en los caracteres útiles. En consecuencia, antes del STX está prescrito para el maestro un tiempo de pausa inicial sin caracteres tSP de como mínimo 2 tiempos de tránsito de carácter. El tiempo de pausa inicial forma parte del telegrama de orden. Sólo un STX con pausa inicial precedente identifica un inicio de telegrama válido.
El intercambio de datos se desarrolla siempre conforme al esquema arriba representado (modo semidúplex):
los tiempos de pausa inicial mínimos que se deben respetar en las distintas frecuencias de baudios se indican en la tabla Tiempos de telegrama maestro.
Tiempo de demora de respuesta El intervalo de tiempo entre el último carácter del telegrama de orden (BCC) y el inicio del telegrama de respuesta (STX) se denomina tiempo de demora de respuesta tAVZ. El tiempo de demora de respuesta máximo admisible es de 20 ms, pero no debe ser inferior a la pausa inicial. Si la estación direccionada no responde dentro del tiempo de demora de respuesta máximo admisible, se guarda un mensaje de error en el maestro. El maestro envía entonces el telegrama previsto para la siguiente estación esclavo.
Los tiempos de demora de respuesta mínimos que se deben respetar en las distintas frecuencias de baudios se indican en la tabla Tiempos de telegrama maestro.
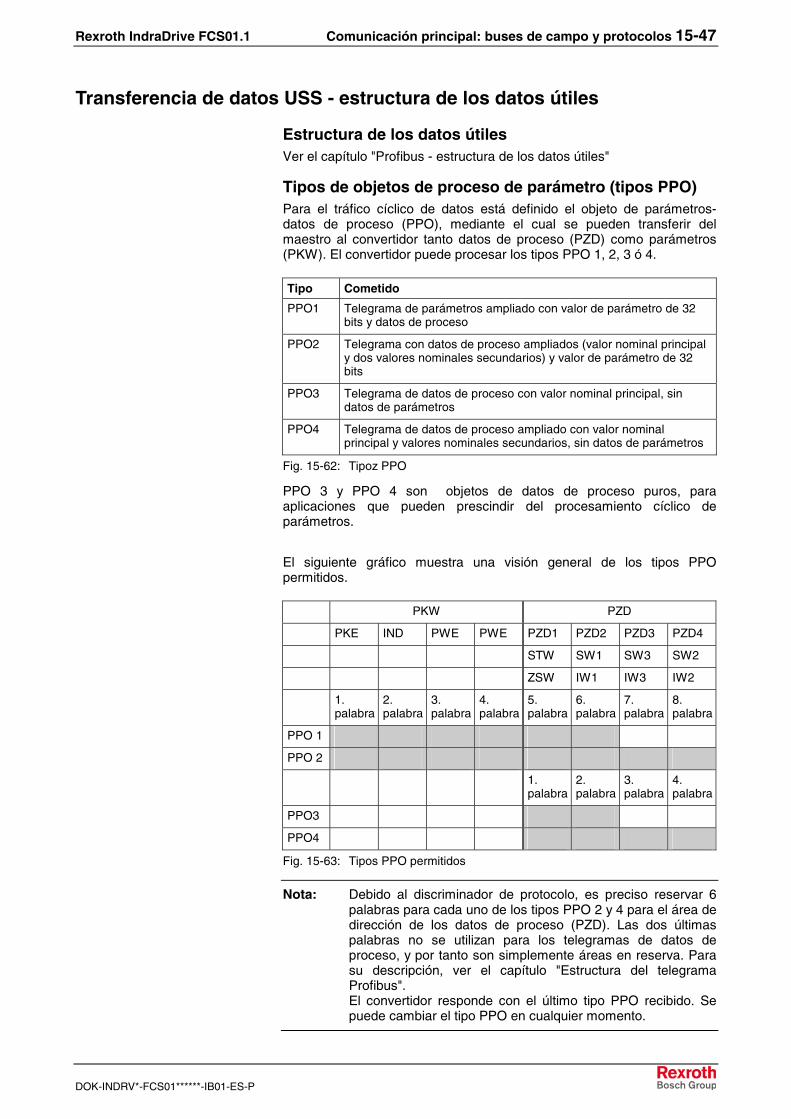
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-47
DOK-INDRV*-FCS01******-IB01-ES-P
Transferencia de datos USS - estructura de los datos útiles
Estructura de los datos útiles Ver el capítulo "Profibus - estructura de los datos útiles"
Tipos de objetos de proceso de parámetro (tipos PPO) Para el tráfico cíclico de datos está definido el objeto de parámetros-datos de proceso (PPO), mediante el cual se pueden transferir del maestro al convertidor tanto datos de proceso (PZD) como parámetros (PKW). El convertidor puede procesar los tipos PPO 1, 2, 3 ó 4.
Tipo Cometido
PPO1 Telegrama de parámetros ampliado con valor de parámetro de 32 bits y datos de proceso
PPO2 Telegrama con datos de proceso ampliados (valor nominal principal y dos valores nominales secundarios) y valor de parámetro de 32 bits
PPO3 Telegrama de datos de proceso con valor nominal principal, sin datos de parámetros
PPO4 Telegrama de datos de proceso ampliado con valor nominal principal y valores nominales secundarios, sin datos de parámetros
Fig. 15-62: Tipoz PPO
PPO 3 y PPO 4 son objetos de datos de proceso puros, para aplicaciones que pueden prescindir del procesamiento cíclico de parámetros.
El siguiente gráfico muestra una visión general de los tipos PPO permitidos.
PKW PZD
PKE IND PWE PWE PZD1 PZD2 PZD3 PZD4
STW SW1 SW3 SW2
ZSW IW1 IW3 IW2
1. palabra
2. palabra
3. palabra
4. palabra
5. palabra
6. palabra
7. palabra
8. palabra
PPO 1
PPO 2
1. palabra
2. palabra
3. palabra
4. palabra
PPO3
PPO4
Fig. 15-63: Tipos PPO permitidos
Nota: Debido al discriminador de protocolo, es preciso reservar 6 palabras para cada uno de los tipos PPO 2 y 4 para el área de dirección de los datos de proceso (PZD). Las dos últimas palabras no se utilizan para los telegramas de datos de proceso, y por tanto son simplemente áreas en reserva. Para su descripción, ver el capítulo "Estructura del telegrama Profibus". El convertidor responde con el último tipo PPO recibido. Se puede cambiar el tipo PPO en cualquier momento.
15-48 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Estructura de telegrama USS
Área de datos útiles PZD (datos de proceso) Ver el capítulo Estructura del telegrama Profibus
Ver el capítulo Estructura del telegrama Profibus
Ver el capítulo Estructura del telegrama Profibus
Ver el capítulo Estructura del telegrama Profibus
Ver el capítulo Estructura del telegrama Profibus
Área de datos útiles PKW (valor de identificación de parámetro) Ver el capítulo Profibus área de datos útiles PKW (valor de identificación de parámetro)
Ver el capítulo Profibus área de datos útiles PKE (identificación de parámetro)
Ver el capítulo Profibus área de datos útiles PKE (identificación de parámetro)
Función maestra Salida Para la activación de la "función maestra salida", se debe ajustar a 1 el parámetro P503. Mediante el parámetro P502 se selecciona el valor maestro a transmitir.
La fuente de control se sigue seleccionando en P509. Los intervalos de transmisión dependen de la frecuencia de baudios USS ajustada:
Frecuencia de baudios Intervalo
4800 baudios 100 ms
9600 baudios 50 ms
19200 baudios 25 ms
38400 baudios 15 ms
Fig. 15-64: Función maestra Salida
Palabra de mando - STW
Palabra de estado -ZSW
Segundo y tercer valores nominales - SW2 y SW3
Valor real 1 - IW1
Valor real 2 y valor real 3 - IW2 e IW3
Área de parámetro (PKW)
Identificación de parámetro (PKE)
Valor de parámetro (PWE)
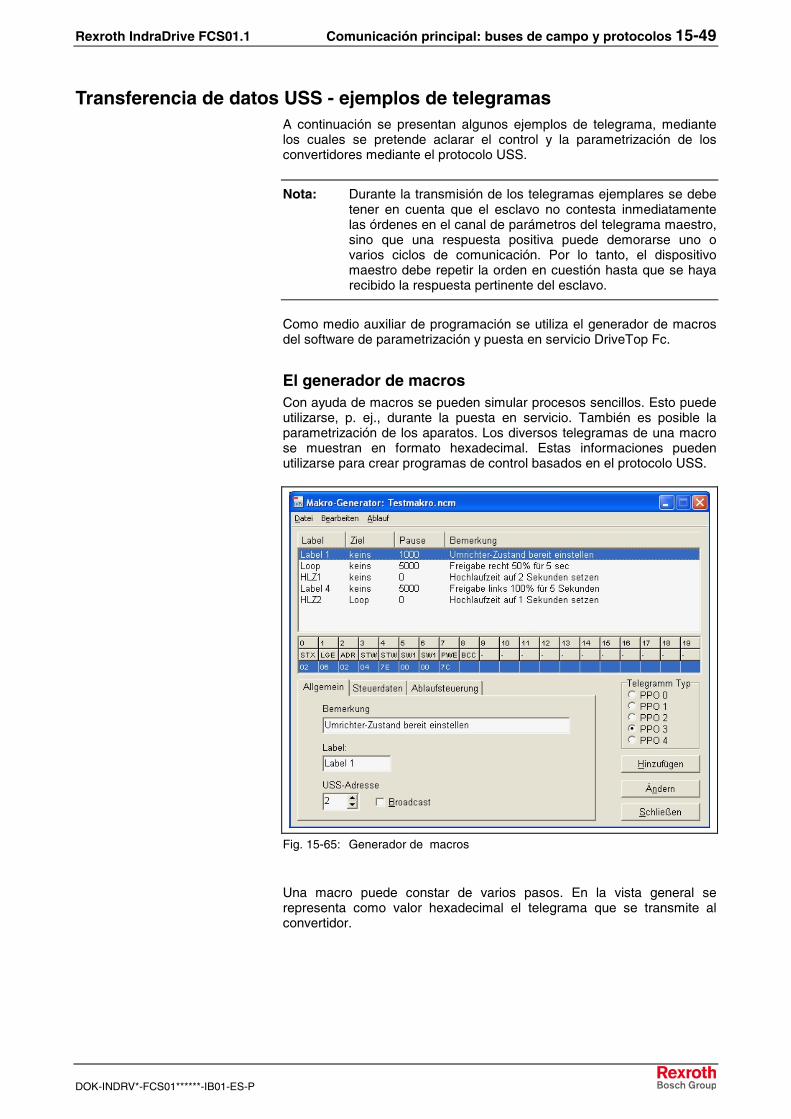
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-49
DOK-INDRV*-FCS01******-IB01-ES-P
Transferencia de datos USS - ejemplos de telegramas A continuación se presentan algunos ejemplos de telegrama, mediante los cuales se pretende aclarar el control y la parametrización de los convertidores mediante el protocolo USS.
Nota: Durante la transmisión de los telegramas ejemplares se debe tener en cuenta que el esclavo no contesta inmediatamente las órdenes en el canal de parámetros del telegrama maestro, sino que una respuesta positiva puede demorarse uno o varios ciclos de comunicación. Por lo tanto, el dispositivo maestro debe repetir la orden en cuestión hasta que se haya recibido la respuesta pertinente del esclavo.
Como medio auxiliar de programación se utiliza el generador de macros del software de parametrización y puesta en servicio DriveTop Fc.
El generador de macros Con ayuda de macros se pueden simular procesos sencillos. Esto puede utilizarse, p. ej., durante la puesta en servicio. También es posible la parametrización de los aparatos. Los diversos telegramas de una macro se muestran en formato hexadecimal. Estas informaciones pueden utilizarse para crear programas de control basados en el protocolo USS.
Fig. 15-65: Generador de macros
Una macro puede constar de varios pasos. En la vista general se representa como valor hexadecimal el telegrama que se transmite al convertidor.

15-50 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Un submenú le ayuda en la creación de los diversos pasos.
• Dirección USS
• Palabra de mando
• Valor nominal
• Número de parámetro
• Índice de parámetros
• Valor de parámetro
• Orden Todos los puntos combinados dan lugar a un paso en la macro. La estructura del telegrama en representación hexadecimal de cada paso individual se muestra en la ventana Macro.
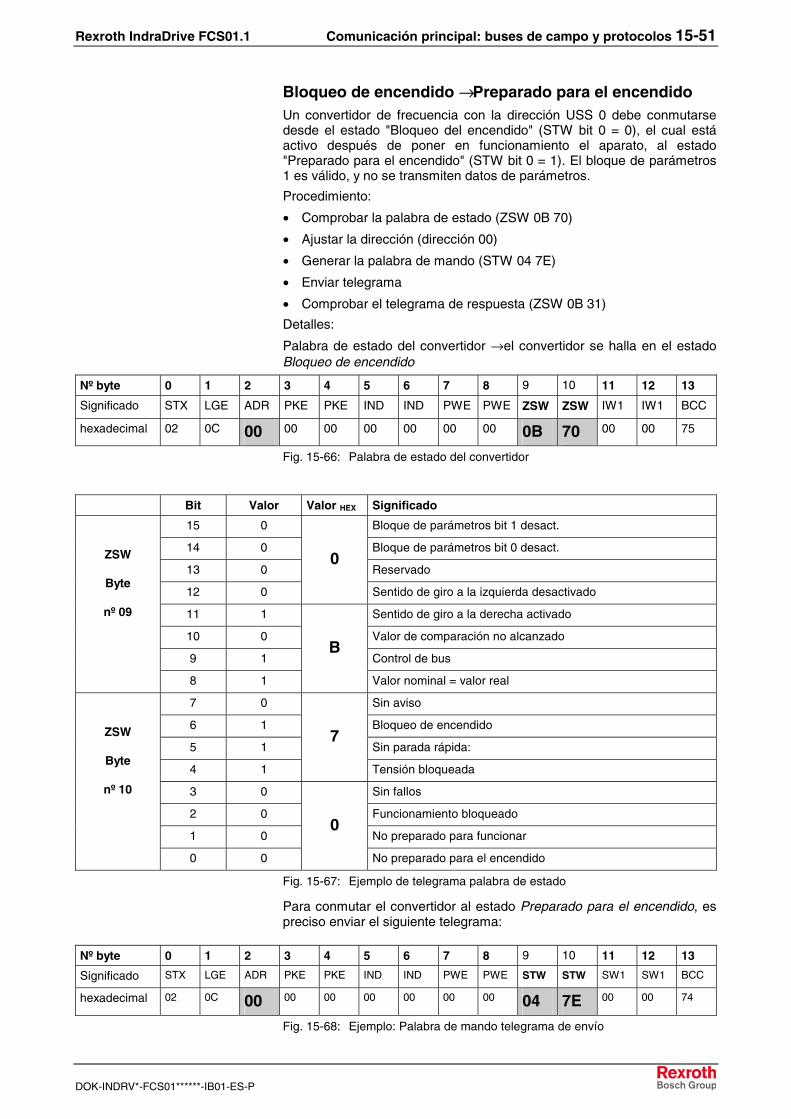
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-51
DOK-INDRV*-FCS01******-IB01-ES-P
Bloqueo de encendido → Preparado para el encendido Un convertidor de frecuencia con la dirección USS 0 debe conmutarse desde el estado "Bloqueo del encendido" (STW bit 0 = 0), el cual está activo después de poner en funcionamiento el aparato, al estado "Preparado para el encendido" (STW bit 0 = 1). El bloque de parámetros 1 es válido, y no se transmiten datos de parámetros.
Procedimiento:
• Comprobar la palabra de estado (ZSW 0B 70)
• Ajustar la dirección (dirección 00)
• Generar la palabra de mando (STW 04 7E)
• Enviar telegrama
• Comprobar el telegrama de respuesta (ZSW 0B 31)
Detalles:
Palabra de estado del convertidor → el convertidor se halla en el estado Bloqueo de encendido
Nº byte 0 1 2 3 4 5 6 7 8 9 10 11 12 13
Significado STX LGE ADR PKE PKE IND IND PWE PWE ZSW ZSW IW1 IW1 BCC
hexadecimal 02 0C 00 00 00 00 00 00 00 0B 70 00 00 75
Fig. 15-66: Palabra de estado del convertidor
Bit Valor Valor HEX Significado
15 0 Bloque de parámetros bit 1 desact.
14 0 Bloque de parámetros bit 0 desact.
13 0 Reservado
12 0
0
Sentido de giro a la izquierda desactivado
11 1 Sentido de giro a la derecha activado
10 0 Valor de comparación no alcanzado
9 1 Control de bus
ZSW
Byte
nº 09
8 1
B
Valor nominal = valor real
7 0 Sin aviso
6 1 Bloqueo de encendido
5 1 Sin parada rápida:
4 1
7
Tensión bloqueada
3 0 Sin fallos
2 0 Funcionamiento bloqueado
1 0 No preparado para funcionar
ZSW
Byte
nº 10
0 0
0
No preparado para el encendido
Fig. 15-67: Ejemplo de telegrama palabra de estado
Para conmutar el convertidor al estado Preparado para el encendido, es preciso enviar el siguiente telegrama:
Nº byte 0 1 2 3 4 5 6 7 8 9 10 11 12 13
Significado STX LGE ADR PKE PKE IND IND PWE PWE STW STW SW1 SW1 BCC
hexadecimal 02 0C 00 00 00 00 00 00 00 04 7E 00 00 74
Fig. 15-68: Ejemplo: Palabra de mando telegrama de envío
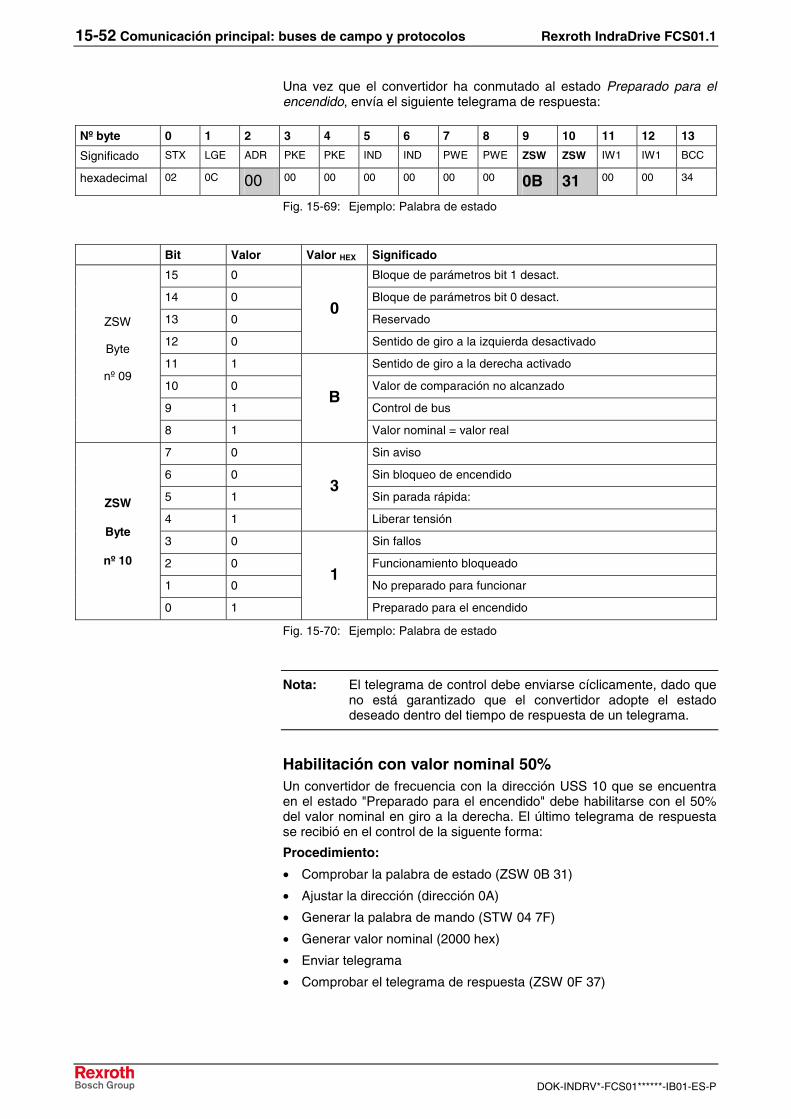
15-52 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Una vez que el convertidor ha conmutado al estado Preparado para el encendido, envía el siguiente telegrama de respuesta:
Nº byte 0 1 2 3 4 5 6 7 8 9 10 11 12 13
Significado STX LGE ADR PKE PKE IND IND PWE PWE ZSW ZSW IW1 IW1 BCC
hexadecimal 02 0C 00 00 00 00 00 00 00 0B 31 00 00 34
Fig. 15-69: Ejemplo: Palabra de estado
Bit Valor Valor HEX Significado
15 0 Bloque de parámetros bit 1 desact.
14 0 Bloque de parámetros bit 0 desact.
13 0 Reservado
12 0
0
Sentido de giro a la izquierda desactivado
11 1 Sentido de giro a la derecha activado
10 0 Valor de comparación no alcanzado
9 1 Control de bus
ZSW
Byte
nº 09
8 1
B
Valor nominal = valor real
7 0 Sin aviso
6 0 Sin bloqueo de encendido
5 1 Sin parada rápida:
4 1
3
Liberar tensión
3 0 Sin fallos
2 0 Funcionamiento bloqueado
1 0 No preparado para funcionar
ZSW
Byte
nº 10
0 1
1
Preparado para el encendido
Fig. 15-70: Ejemplo: Palabra de estado
Nota: El telegrama de control debe enviarse cíclicamente, dado que no está garantizado que el convertidor adopte el estado deseado dentro del tiempo de respuesta de un telegrama.
Habilitación con valor nominal 50% Un convertidor de frecuencia con la dirección USS 10 que se encuentra en el estado "Preparado para el encendido" debe habilitarse con el 50% del valor nominal en giro a la derecha. El último telegrama de respuesta se recibió en el control de la siguente forma:
Procedimiento:
• Comprobar la palabra de estado (ZSW 0B 31)
• Ajustar la dirección (dirección 0A)
• Generar la palabra de mando (STW 04 7F)
• Generar valor nominal (2000 hex)
• Enviar telegrama
• Comprobar el telegrama de respuesta (ZSW 0F 37)
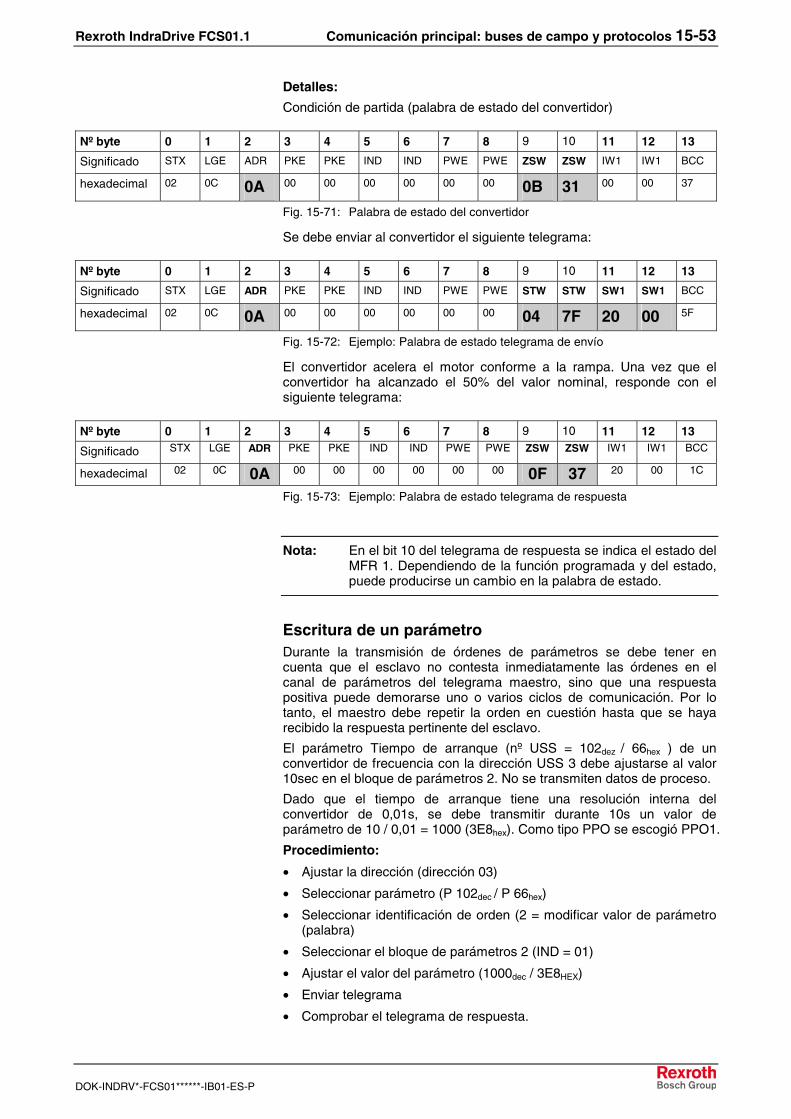
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-53
DOK-INDRV*-FCS01******-IB01-ES-P
Detalles:
Condición de partida (palabra de estado del convertidor)
Nº byte 0 1 2 3 4 5 6 7 8 9 10 11 12 13
Significado STX LGE ADR PKE PKE IND IND PWE PWE ZSW ZSW IW1 IW1 BCC
hexadecimal 02 0C 0A 00 00 00 00 00 00 0B 31 00 00 37
Fig. 15-71: Palabra de estado del convertidor
Se debe enviar al convertidor el siguiente telegrama:
Nº byte 0 1 2 3 4 5 6 7 8 9 10 11 12 13
Significado STX LGE ADR PKE PKE IND IND PWE PWE STW STW SW1 SW1 BCC
hexadecimal 02 0C 0A 00 00 00 00 00 00 04 7F 20 00 5F
Fig. 15-72: Ejemplo: Palabra de estado telegrama de envío
El convertidor acelera el motor conforme a la rampa. Una vez que el convertidor ha alcanzado el 50% del valor nominal, responde con el siguiente telegrama:
Nº byte 0 1 2 3 4 5 6 7 8 9 10 11 12 13
Significado STX LGE ADR PKE PKE IND IND PWE PWE ZSW ZSW IW1 IW1 BCC
hexadecimal 02 0C 0A 00 00 00 00 00 00 0F 37 20 00 1C
Fig. 15-73: Ejemplo: Palabra de estado telegrama de respuesta
Nota: En el bit 10 del telegrama de respuesta se indica el estado del MFR 1. Dependiendo de la función programada y del estado, puede producirse un cambio en la palabra de estado.
Escritura de un parámetro Durante la transmisión de órdenes de parámetros se debe tener en cuenta que el esclavo no contesta inmediatamente las órdenes en el canal de parámetros del telegrama maestro, sino que una respuesta positiva puede demorarse uno o varios ciclos de comunicación. Por lo tanto, el maestro debe repetir la orden en cuestión hasta que se haya recibido la respuesta pertinente del esclavo.
El parámetro Tiempo de arranque (nº USS = 102dez / 66hex ) de un convertidor de frecuencia con la dirección USS 3 debe ajustarse al valor 10sec en el bloque de parámetros 2. No se transmiten datos de proceso.
Dado que el tiempo de arranque tiene una resolución interna del convertidor de 0,01s, se debe transmitir durante 10s un valor de parámetro de 10 / 0,01 = 1000 (3E8hex). Como tipo PPO se escogió PPO1.
Procedimiento:
• Ajustar la dirección (dirección 03)
• Seleccionar parámetro (P 102dec / P 66hex)
• Seleccionar identificación de orden (2 = modificar valor de parámetro (palabra)
• Seleccionar el bloque de parámetros 2 (IND = 01)
• Ajustar el valor del parámetro (1000dec / 3E8HEX)
• Enviar telegrama
• Comprobar el telegrama de respuesta.
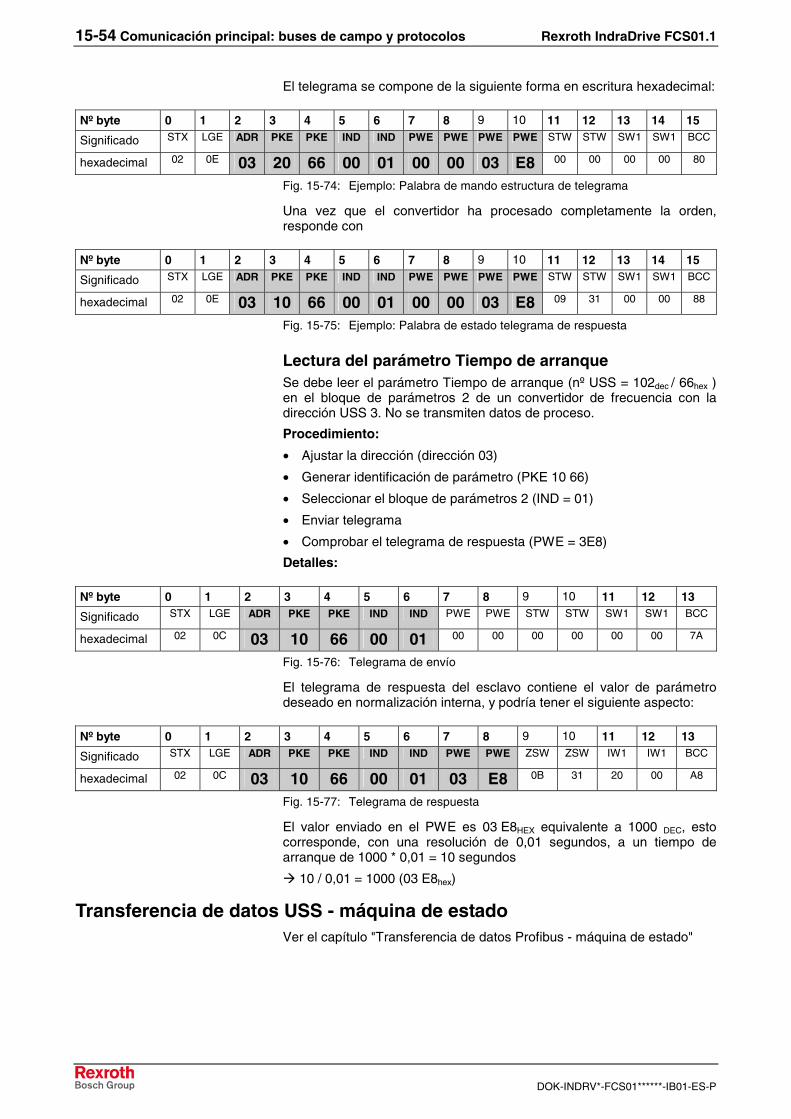
15-54 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
El telegrama se compone de la siguiente forma en escritura hexadecimal:
Nº byte 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Significado STX LGE ADR PKE PKE IND IND PWE PWE PWE PWE STW STW SW1 SW1 BCC
hexadecimal 02 0E 03 20 66 00 01 00 00 03 E8 00 00 00 00 80
Fig. 15-74: Ejemplo: Palabra de mando estructura de telegrama
Una vez que el convertidor ha procesado completamente la orden, responde con
Nº byte 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Significado STX LGE ADR PKE PKE IND IND PWE PWE PWE PWE STW STW SW1 SW1 BCC
hexadecimal 02 0E 03 10 66 00 01 00 00 03 E8 09 31 00 00 88
Fig. 15-75: Ejemplo: Palabra de estado telegrama de respuesta
Lectura del parámetro Tiempo de arranque Se debe leer el parámetro Tiempo de arranque (nº USS = 102dec / 66hex ) en el bloque de parámetros 2 de un convertidor de frecuencia con la dirección USS 3. No se transmiten datos de proceso.
Procedimiento:
• Ajustar la dirección (dirección 03)
• Generar identificación de parámetro (PKE 10 66)
• Seleccionar el bloque de parámetros 2 (IND = 01)
• Enviar telegrama
• Comprobar el telegrama de respuesta (PWE = 3E8)
Detalles:
Nº byte 0 1 2 3 4 5 6 7 8 9 10 11 12 13
Significado STX LGE ADR PKE PKE IND IND PWE PWE STW STW SW1 SW1 BCC
hexadecimal 02 0C 03 10 66 00 01 00 00 00 00 00 00 7A
Fig. 15-76: Telegrama de envío
El telegrama de respuesta del esclavo contiene el valor de parámetro deseado en normalización interna, y podría tener el siguiente aspecto:
Nº byte 0 1 2 3 4 5 6 7 8 9 10 11 12 13
Significado STX LGE ADR PKE PKE IND IND PWE PWE ZSW ZSW IW1 IW1 BCC
hexadecimal 02 0C 03 10 66 00 01 03 E8 0B 31 20 00 A8
Fig. 15-77: Telegrama de respuesta
El valor enviado en el PWE es 03 E8HEX equivalente a 1000 DEC, esto corresponde, con una resolución de 0,01 segundos, a un tiempo de arranque de 1000 * 0,01 = 10 segundos
10 / 0,01 = 1000 (03 E8hex)
Transferencia de datos USS - máquina de estado Ver el capítulo "Transferencia de datos Profibus - máquina de estado"
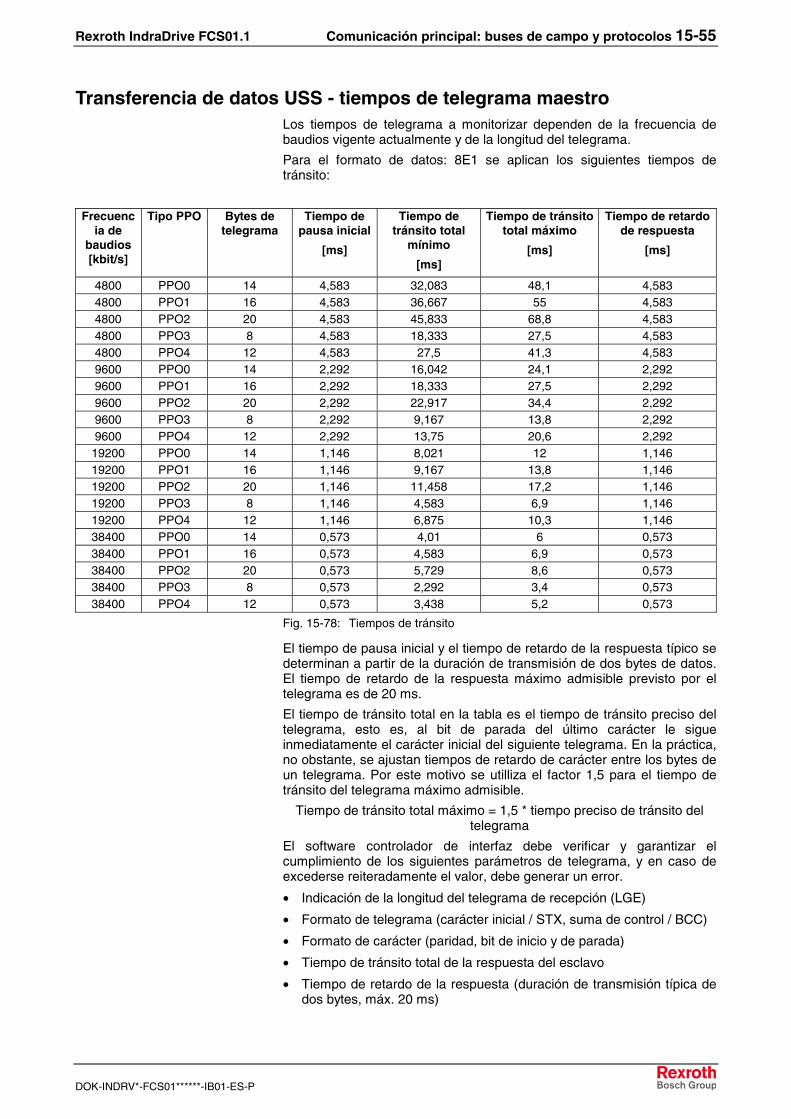
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-55
DOK-INDRV*-FCS01******-IB01-ES-P
Transferencia de datos USS - tiempos de telegrama maestro Los tiempos de telegrama a monitorizar dependen de la frecuencia de baudios vigente actualmente y de la longitud del telegrama.
Para el formato de datos: 8E1 se aplican los siguientes tiempos de tránsito:
Frecuencia de
baudios [kbit/s]
Tipo PPO Bytes de telegrama
Tiempo de pausa inicial
[ms]
Tiempo de tránsito total
mínimo
[ms]
Tiempo de tránsito total máximo
[ms]
Tiempo de retardo de respuesta
[ms]
4800 PPO0 14 4,583 32,083 48,1 4,583 4800 PPO1 16 4,583 36,667 55 4,583 4800 PPO2 20 4,583 45,833 68,8 4,583 4800 PPO3 8 4,583 18,333 27,5 4,583 4800 PPO4 12 4,583 27,5 41,3 4,583 9600 PPO0 14 2,292 16,042 24,1 2,292 9600 PPO1 16 2,292 18,333 27,5 2,292 9600 PPO2 20 2,292 22,917 34,4 2,292 9600 PPO3 8 2,292 9,167 13,8 2,292 9600 PPO4 12 2,292 13,75 20,6 2,292
19200 PPO0 14 1,146 8,021 12 1,146 19200 PPO1 16 1,146 9,167 13,8 1,146 19200 PPO2 20 1,146 11,458 17,2 1,146 19200 PPO3 8 1,146 4,583 6,9 1,146 19200 PPO4 12 1,146 6,875 10,3 1,146 38400 PPO0 14 0,573 4,01 6 0,573 38400 PPO1 16 0,573 4,583 6,9 0,573 38400 PPO2 20 0,573 5,729 8,6 0,573 38400 PPO3 8 0,573 2,292 3,4 0,573 38400 PPO4 12 0,573 3,438 5,2 0,573
Fig. 15-78: Tiempos de tránsito
El tiempo de pausa inicial y el tiempo de retardo de la respuesta típico se determinan a partir de la duración de transmisión de dos bytes de datos. El tiempo de retardo de la respuesta máximo admisible previsto por el telegrama es de 20 ms.
El tiempo de tránsito total en la tabla es el tiempo de tránsito preciso del telegrama, esto es, al bit de parada del último carácter le sigue inmediatamente el carácter inicial del siguiente telegrama. En la práctica, no obstante, se ajustan tiempos de retardo de carácter entre los bytes de un telegrama. Por este motivo se utilliza el factor 1,5 para el tiempo de tránsito del telegrama máximo admisible.
Tiempo de tránsito total máximo = 1,5 * tiempo preciso de tránsito del telegrama
El software controlador de interfaz debe verificar y garantizar el cumplimiento de los siguientes parámetros de telegrama, y en caso de excederse reiteradamente el valor, debe generar un error.
• Indicación de la longitud del telegrama de recepción (LGE)
• Formato de telegrama (carácter inicial / STX, suma de control / BCC)
• Formato de carácter (paridad, bit de inicio y de parada)
• Tiempo de tránsito total de la respuesta del esclavo
• Tiempo de retardo de la respuesta (duración de transmisión típica de dos bytes, máx. 20 ms)
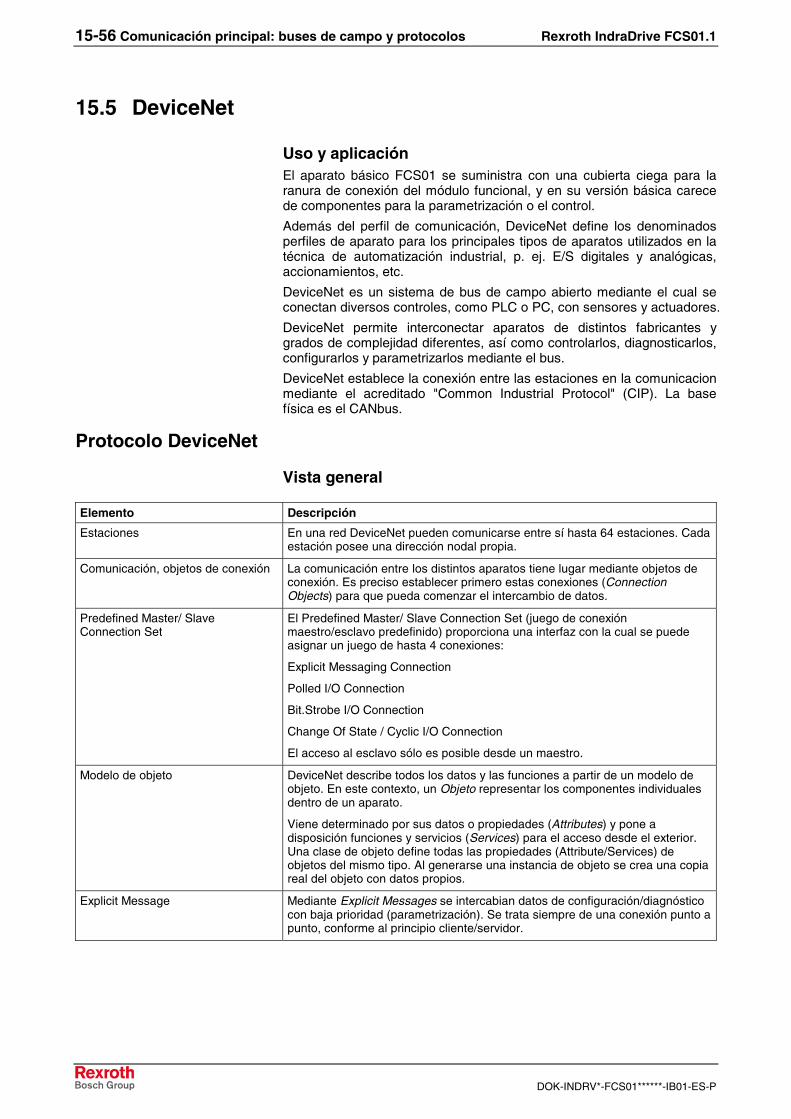
15-56 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
15.5 DeviceNet
Uso y aplicación El aparato básico FCS01 se suministra con una cubierta ciega para la ranura de conexión del módulo funcional, y en su versión básica carece de componentes para la parametrización o el control.
Además del perfil de comunicación, DeviceNet define los denominados perfiles de aparato para los principales tipos de aparatos utilizados en la técnica de automatización industrial, p. ej. E/S digitales y analógicas, accionamientos, etc.
DeviceNet es un sistema de bus de campo abierto mediante el cual se conectan diversos controles, como PLC o PC, con sensores y actuadores.
DeviceNet permite interconectar aparatos de distintos fabricantes y grados de complejidad diferentes, así como controlarlos, diagnosticarlos, configurarlos y parametrizarlos mediante el bus.
DeviceNet establece la conexión entre las estaciones en la comunicacion mediante el acreditado "Common Industrial Protocol" (CIP). La base física es el CANbus.
Protocolo DeviceNet
Vista general
Elemento Descripción
Estaciones En una red DeviceNet pueden comunicarse entre sí hasta 64 estaciones. Cada estación posee una dirección nodal propia.
Comunicación, objetos de conexión La comunicación entre los distintos aparatos tiene lugar mediante objetos de conexión. Es preciso establecer primero estas conexiones (Connection Objects) para que pueda comenzar el intercambio de datos.
Predefined Master/ Slave Connection Set
El Predefined Master/ Slave Connection Set (juego de conexión maestro/esclavo predefinido) proporciona una interfaz con la cual se puede asignar un juego de hasta 4 conexiones:
Explicit Messaging Connection
Polled I/O Connection
Bit.Strobe I/O Connection
Change Of State / Cyclic I/O Connection
El acceso al esclavo sólo es posible desde un maestro.
Modelo de objeto DeviceNet describe todos los datos y las funciones a partir de un modelo de objeto. En este contexto, un Objeto representar los componentes individuales dentro de un aparato.
Viene determinado por sus datos o propiedades (Attributes) y pone a disposición funciones y servicios (Services) para el acceso desde el exterior. Una clase de objeto define todas las propiedades (Attribute/Services) de objetos del mismo tipo. Al generarse una instancia de objeto se crea una copia real del objeto con datos propios.
Explicit Message Mediante Explicit Messages se intercabian datos de configuración/diagnóstico con baja prioridad (parametrización). Se trata siempre de una conexión punto a punto, conforme al principio cliente/servidor.
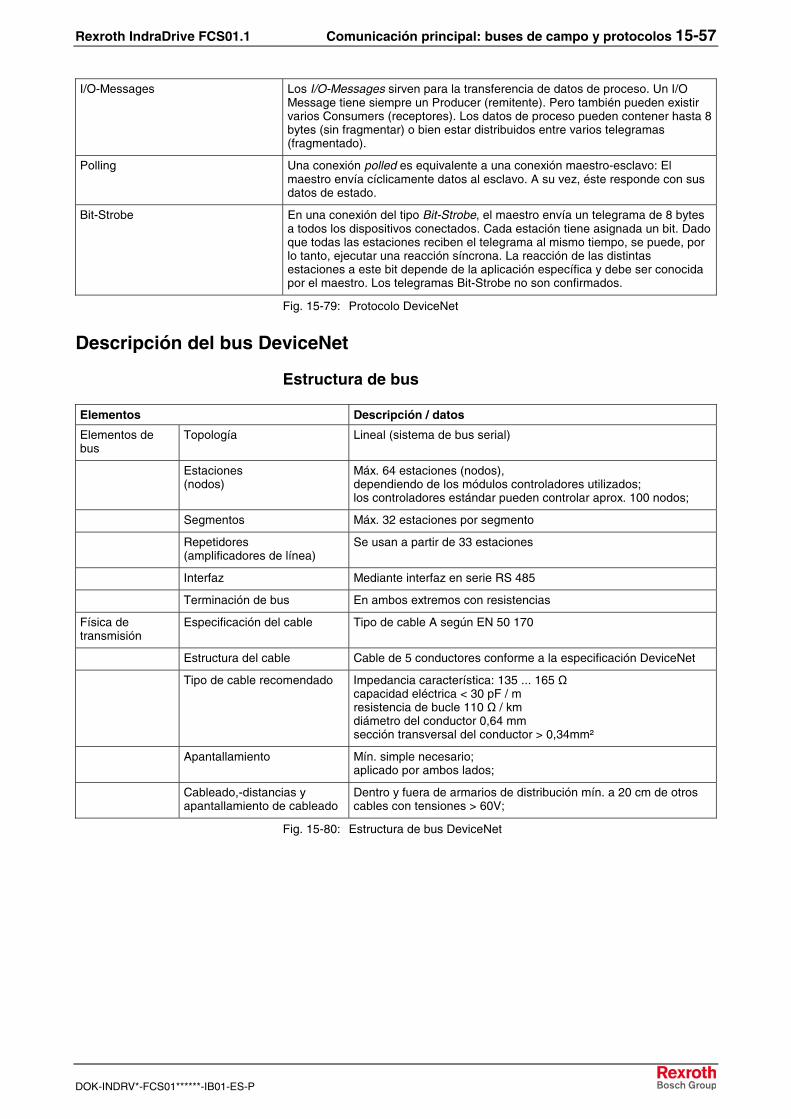
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-57
DOK-INDRV*-FCS01******-IB01-ES-P
I/O-Messages
Los I/O-Messages sirven para la transferencia de datos de proceso. Un I/O Message tiene siempre un Producer (remitente). Pero también pueden existir varios Consumers (receptores). Los datos de proceso pueden contener hasta 8 bytes (sin fragmentar) o bien estar distribuidos entre varios telegramas (fragmentado).
Polling Una conexión polled es equivalente a una conexión maestro-esclavo: El maestro envía cíclicamente datos al esclavo. A su vez, éste responde con sus datos de estado.
Bit-Strobe En una conexión del tipo Bit-Strobe, el maestro envía un telegrama de 8 bytes a todos los dispositivos conectados. Cada estación tiene asignada un bit. Dado que todas las estaciones reciben el telegrama al mismo tiempo, se puede, por lo tanto, ejecutar una reacción síncrona. La reacción de las distintas estaciones a este bit depende de la aplicación específica y debe ser conocida por el maestro. Los telegramas Bit-Strobe no son confirmados.
Fig. 15-79: Protocolo DeviceNet
Descripción del bus DeviceNet
Estructura de bus
Elementos Descripción / datos
Elementos de bus
Topología Lineal (sistema de bus serial)
Estaciones (nodos)
Máx. 64 estaciones (nodos), dependiendo de los módulos controladores utilizados; los controladores estándar pueden controlar aprox. 100 nodos;
Segmentos Máx. 32 estaciones por segmento
Repetidores (amplificadores de línea)
Se usan a partir de 33 estaciones
Interfaz Mediante interfaz en serie RS 485
Terminación de bus En ambos extremos con resistencias
Física de transmisión
Especificación del cable Tipo de cable A según EN 50 170
Estructura del cable Cable de 5 conductores conforme a la especificación DeviceNet
Tipo de cable recomendado Impedancia característica: 135 ... 165 Ω capacidad eléctrica < 30 pF / m resistencia de bucle 110 Ω / km diámetro del conductor 0,64 mm sección transversal del conductor > 0,34mm²
Apantallamiento Mín. simple necesario; aplicado por ambos lados;
Cableado,-distancias y apantallamiento de cableado
Dentro y fuera de armarios de distribución mín. a 20 cm de otros cables con tensiones > 60V;
Fig. 15-80: Estructura de bus DeviceNet
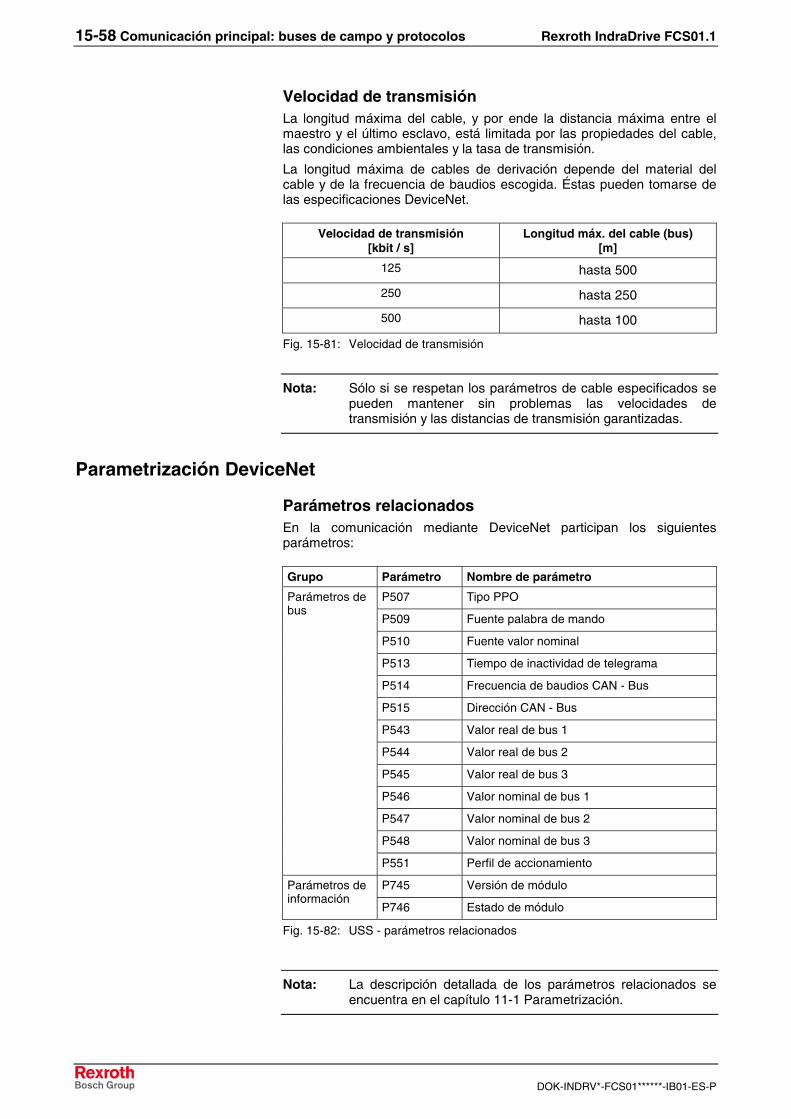
15-58 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Velocidad de transmisión La longitud máxima del cable, y por ende la distancia máxima entre el maestro y el último esclavo, está limitada por las propiedades del cable, las condiciones ambientales y la tasa de transmisión.
La longitud máxima de cables de derivación depende del material del cable y de la frecuencia de baudios escogida. Éstas pueden tomarse de las especificaciones DeviceNet.
Velocidad de transmisión [kbit / s]
Longitud máx. del cable (bus) [m]
125 hasta 500
250 hasta 250
500 hasta 100
Fig. 15-81: Velocidad de transmisión
Nota: Sólo si se respetan los parámetros de cable especificados se pueden mantener sin problemas las velocidades de transmisión y las distancias de transmisión garantizadas.
Parametrización DeviceNet
Parámetros relacionados En la comunicación mediante DeviceNet participan los siguientes parámetros:
Grupo Parámetro Nombre de parámetro
P507 Tipo PPO
P509 Fuente palabra de mando
P510 Fuente valor nominal
P513 Tiempo de inactividad de telegrama
P514 Frecuencia de baudios CAN - Bus
P515 Dirección CAN - Bus
P543 Valor real de bus 1
P544 Valor real de bus 2
P545 Valor real de bus 3
P546 Valor nominal de bus 1
P547 Valor nominal de bus 2
P548 Valor nominal de bus 3
Parámetros de bus
P551 Perfil de accionamiento
P745 Versión de módulo Parámetros de información
P746 Estado de módulo
Fig. 15-82: USS - parámetros relacionados
Nota: La descripción detallada de los parámetros relacionados se encuentra en el capítulo 11-1 Parametrización.
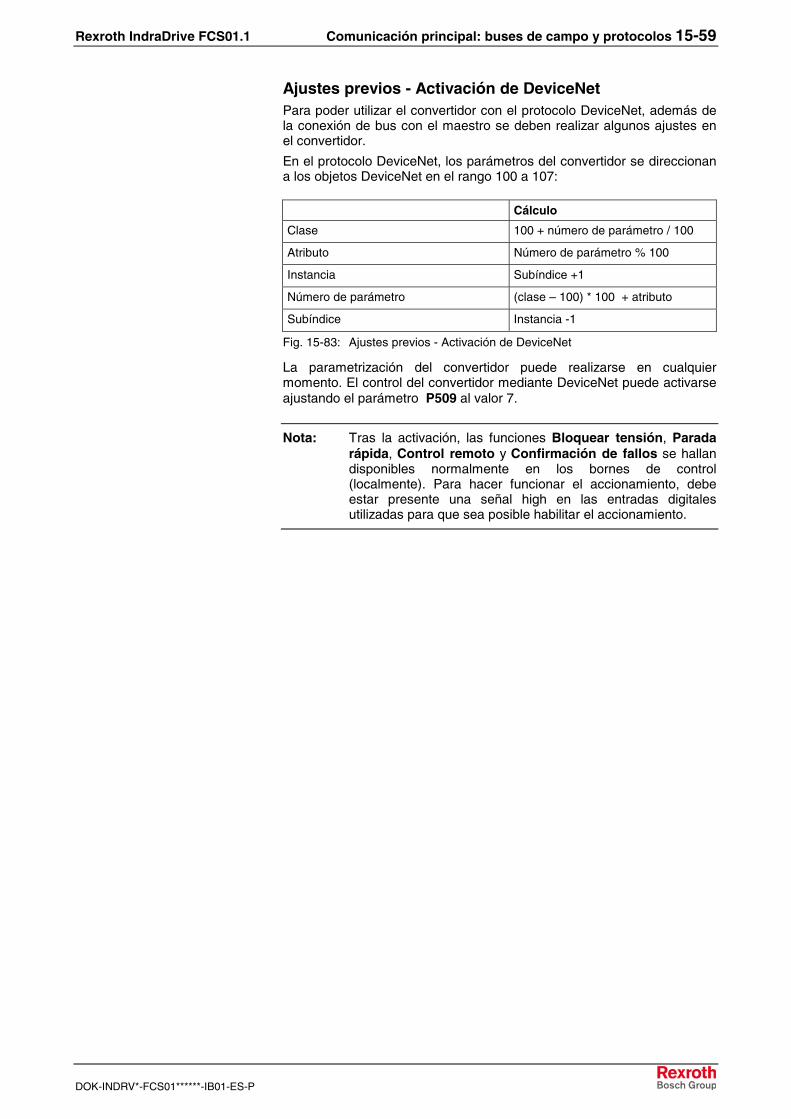
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-59
DOK-INDRV*-FCS01******-IB01-ES-P
Ajustes previos - Activación de DeviceNet Para poder utilizar el convertidor con el protocolo DeviceNet, además de la conexión de bus con el maestro se deben realizar algunos ajustes en el convertidor.
En el protocolo DeviceNet, los parámetros del convertidor se direccionan a los objetos DeviceNet en el rango 100 a 107:
Cálculo
Clase 100 + número de parámetro / 100
Atributo Número de parámetro % 100
Instancia Subíndice +1
Número de parámetro (clase – 100) * 100 + atributo
Subíndice Instancia -1
Fig. 15-83: Ajustes previos - Activación de DeviceNet
La parametrización del convertidor puede realizarse en cualquier momento. El control del convertidor mediante DeviceNet puede activarse ajustando el parámetro P509 al valor 7.
Nota: Tras la activación, las funciones Bloquear tensión, Parada rápida, Control remoto y Confirmación de fallos se hallan disponibles normalmente en los bornes de control (localmente). Para hacer funcionar el accionamiento, debe estar presente una señal high en las entradas digitales utilizadas para que sea posible habilitar el accionamiento.
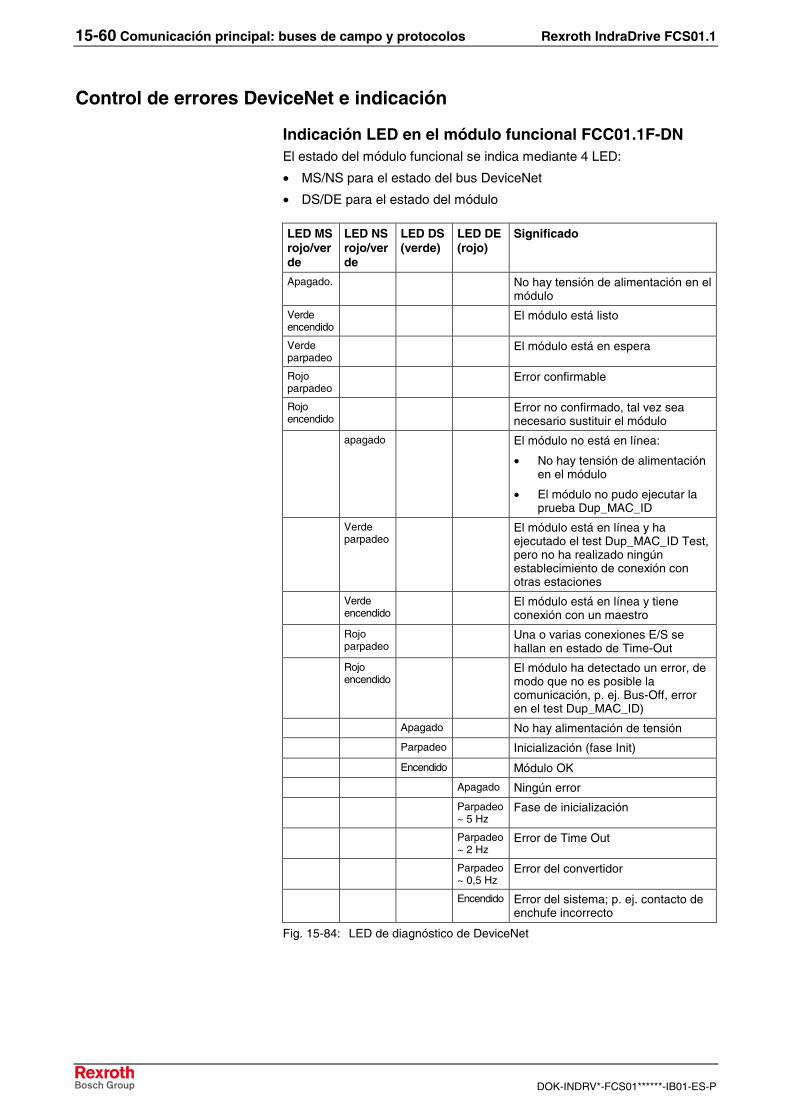
15-60 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Control de errores DeviceNet e indicación
Indicación LED en el módulo funcional FCC01.1F-DN El estado del módulo funcional se indica mediante 4 LED:
• MS/NS para el estado del bus DeviceNet
• DS/DE para el estado del módulo
LED MS rojo/verde
LED NS rojo/verde
LED DS (verde)
LED DE (rojo)
Significado
Apagado. No hay tensión de alimentación en el módulo
Verde encendido
El módulo está listo
Verde parpadeo
El módulo está en espera
Rojo parpadeo
Error confirmable
Rojo encendido
Error no confirmado, tal vez sea necesario sustituir el módulo
apagado El módulo no está en línea:
• No hay tensión de alimentación en el módulo
• El módulo no pudo ejecutar la prueba Dup_MAC_ID
Verde parpadeo
El módulo está en línea y ha ejecutado el test Dup_MAC_ID Test, pero no ha realizado ningún establecimiento de conexión con otras estaciones
Verde encendido
El módulo está en línea y tiene conexión con un maestro
Rojo parpadeo
Una o varias conexiones E/S se hallan en estado de Time-Out
Rojo encendido
El módulo ha detectado un error, de modo que no es posible la comunicación, p. ej. Bus-Off, error en el test Dup_MAC_ID)
Apagado No hay alimentación de tensión
Parpadeo Inicialización (fase Init)
Encendido Módulo OK
Apagado Ningún error
Parpadeo ~ 5 Hz
Fase de inicialización
Parpadeo ~ 2 Hz
Error de Time Out
Parpadeo ~ 0,5 Hz
Error del convertidor
Encendido Error del sistema; p. ej. contacto de enchufe incorrecto
Fig. 15-84: LED de diagnóstico de DeviceNet
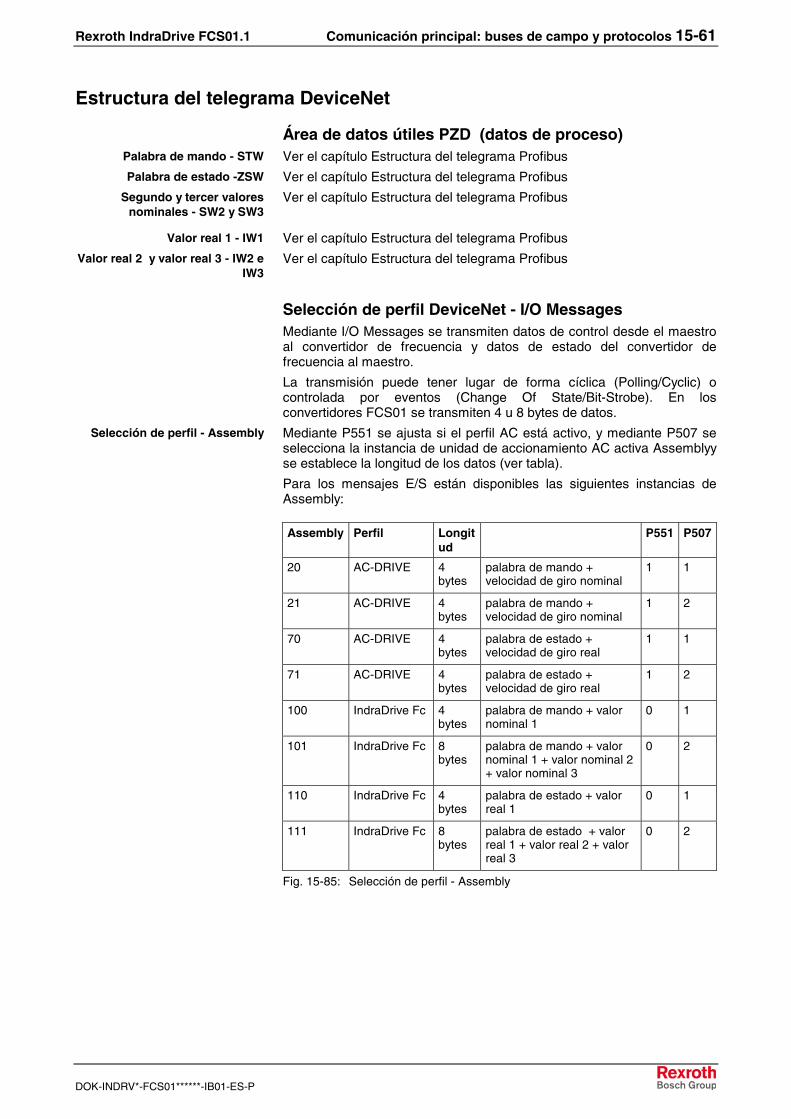
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-61
DOK-INDRV*-FCS01******-IB01-ES-P
Estructura del telegrama DeviceNet
Área de datos útiles PZD (datos de proceso) Ver el capítulo Estructura del telegrama Profibus
Ver el capítulo Estructura del telegrama Profibus
Ver el capítulo Estructura del telegrama Profibus
Ver el capítulo Estructura del telegrama Profibus
Ver el capítulo Estructura del telegrama Profibus
Selección de perfil DeviceNet - I/O Messages Mediante I/O Messages se transmiten datos de control desde el maestro al convertidor de frecuencia y datos de estado del convertidor de frecuencia al maestro.
La transmisión puede tener lugar de forma cíclica (Polling/Cyclic) o controlada por eventos (Change Of State/Bit-Strobe). En los convertidores FCS01 se transmiten 4 u 8 bytes de datos.
Mediante P551 se ajusta si el perfil AC está activo, y mediante P507 se selecciona la instancia de unidad de accionamiento AC activa Assemblyy se establece la longitud de los datos (ver tabla).
Para los mensajes E/S están disponibles las siguientes instancias de Assembly:
Assembly Perfil Longitud
P551 P507
20 AC-DRIVE 4 bytes
palabra de mando + velocidad de giro nominal
1 1
21 AC-DRIVE 4 bytes
palabra de mando + velocidad de giro nominal
1 2
70 AC-DRIVE 4 bytes
palabra de estado + velocidad de giro real
1 1
71 AC-DRIVE 4 bytes
palabra de estado + velocidad de giro real
1 2
100 IndraDrive Fc 4 bytes
palabra de mando + valor nominal 1
0 1
101 IndraDrive Fc 8 bytes
palabra de mando + valor nominal 1 + valor nominal 2 + valor nominal 3
0 2
110 IndraDrive Fc 4 bytes
palabra de estado + valor real 1
0 1
111 IndraDrive Fc 8 bytes
palabra de estado + valor real 1 + valor real 2 + valor real 3
0 2
Fig. 15-85: Selección de perfil - Assembly
Palabra de mando - STW
Palabra de estado -ZSW
Segundo y tercer valores nominales - SW2 y SW3
Valor real 1 - IW1
Valor real 2 y valor real 3 - IW2 e IW3
Selección de perfil - Assembly
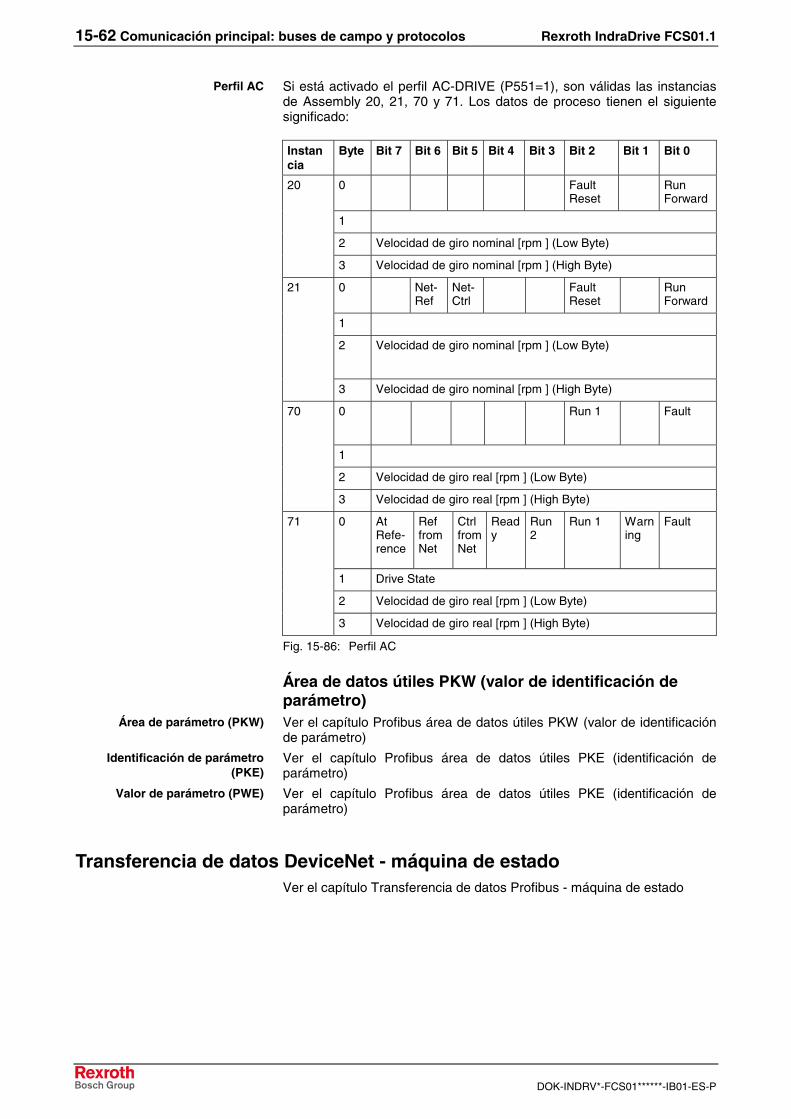
15-62 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Si está activado el perfil AC-DRIVE (P551=1), son válidas las instancias de Assembly 20, 21, 70 y 71. Los datos de proceso tienen el siguiente significado:
Instancia
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 Fault Reset
Run Forward
1
2 Velocidad de giro nominal [rpm ] (Low Byte)
20
3 Velocidad de giro nominal [rpm ] (High Byte)
0 Net-Ref
Net-Ctrl
Fault Reset
Run Forward
1
2 Velocidad de giro nominal [rpm ] (Low Byte)
21
3 Velocidad de giro nominal [rpm ] (High Byte)
0 Run 1
Fault
1
2 Velocidad de giro real [rpm ] (Low Byte)
70
3 Velocidad de giro real [rpm ] (High Byte)
0 At Refe-rence
Ref from Net
Ctrl from Net
Ready
Run 2
Run 1 Warning
Fault
1 Drive State
2 Velocidad de giro real [rpm ] (Low Byte)
71
3 Velocidad de giro real [rpm ] (High Byte)
Fig. 15-86: Perfil AC
Área de datos útiles PKW (valor de identificación de parámetro) Ver el capítulo Profibus área de datos útiles PKW (valor de identificación de parámetro)
Ver el capítulo Profibus área de datos útiles PKE (identificación de parámetro)
Ver el capítulo Profibus área de datos útiles PKE (identificación de parámetro)
Transferencia de datos DeviceNet - máquina de estado Ver el capítulo Transferencia de datos Profibus - máquina de estado
Perfil AC
Área de parámetro (PKW)
Identificación de parámetro (PKE)
Valor de parámetro (PWE)
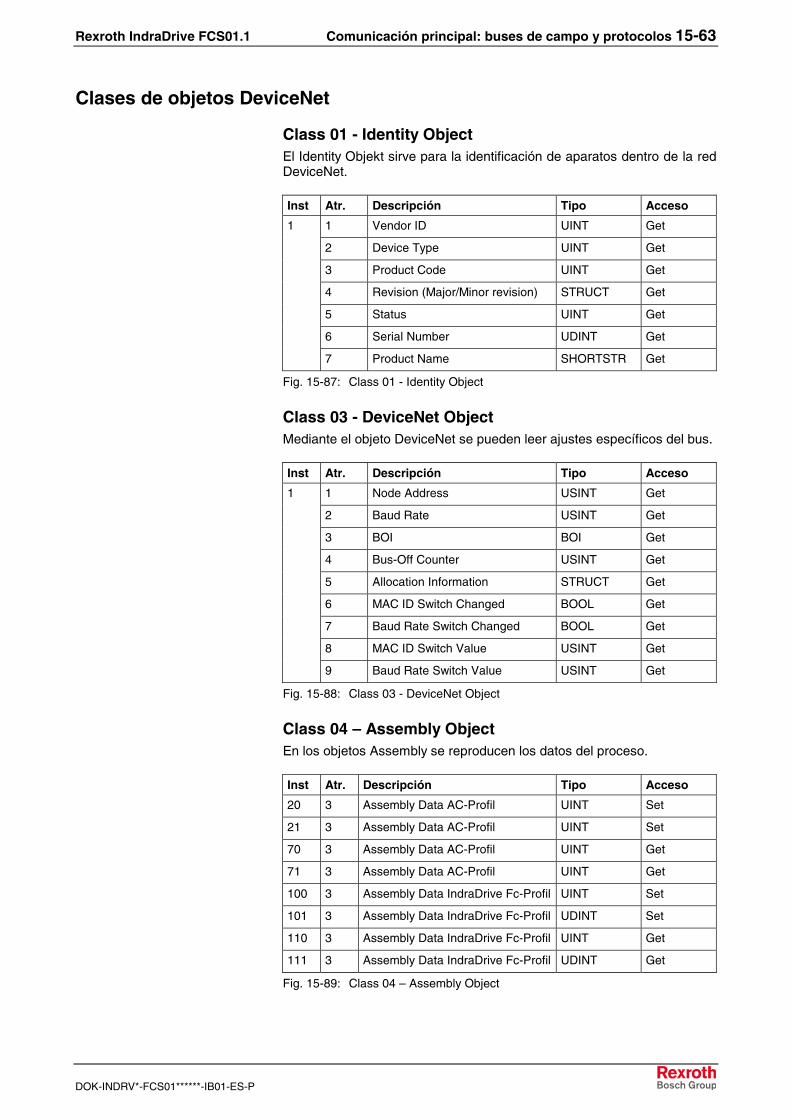
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-63
DOK-INDRV*-FCS01******-IB01-ES-P
Clases de objetos DeviceNet
Class 01 - Identity Object El Identity Objekt sirve para la identificación de aparatos dentro de la red DeviceNet.
Inst Atr. Descripción Tipo Acceso
1 Vendor ID UINT Get
2 Device Type UINT Get
3 Product Code UINT Get
4 Revision (Major/Minor revision) STRUCT Get
5 Status UINT Get
6 Serial Number UDINT Get
1
7 Product Name SHORTSTR Get
Fig. 15-87: Class 01 - Identity Object
Class 03 - DeviceNet Object Mediante el objeto DeviceNet se pueden leer ajustes específicos del bus.
Inst Atr. Descripción Tipo Acceso
1 Node Address USINT Get
2 Baud Rate USINT Get
3 BOI BOI Get
4 Bus-Off Counter USINT Get
5 Allocation Information STRUCT Get
6 MAC ID Switch Changed BOOL Get
7 Baud Rate Switch Changed BOOL Get
8 MAC ID Switch Value USINT Get
1
9 Baud Rate Switch Value USINT Get
Fig. 15-88: Class 03 - DeviceNet Object
Class 04 – Assembly Object En los objetos Assembly se reproducen los datos del proceso.
Inst Atr. Descripción Tipo Acceso
20 3 Assembly Data AC-Profil UINT Set
21 3 Assembly Data AC-Profil UINT Set
70 3 Assembly Data AC-Profil UINT Get
71 3 Assembly Data AC-Profil UINT Get
100 3 Assembly Data IndraDrive Fc-Profil UINT Set
101 3 Assembly Data IndraDrive Fc-Profil UDINT Set
110 3 Assembly Data IndraDrive Fc-Profil UINT Get
111 3 Assembly Data IndraDrive Fc-Profil UDINT Get
Fig. 15-89: Class 04 – Assembly Object
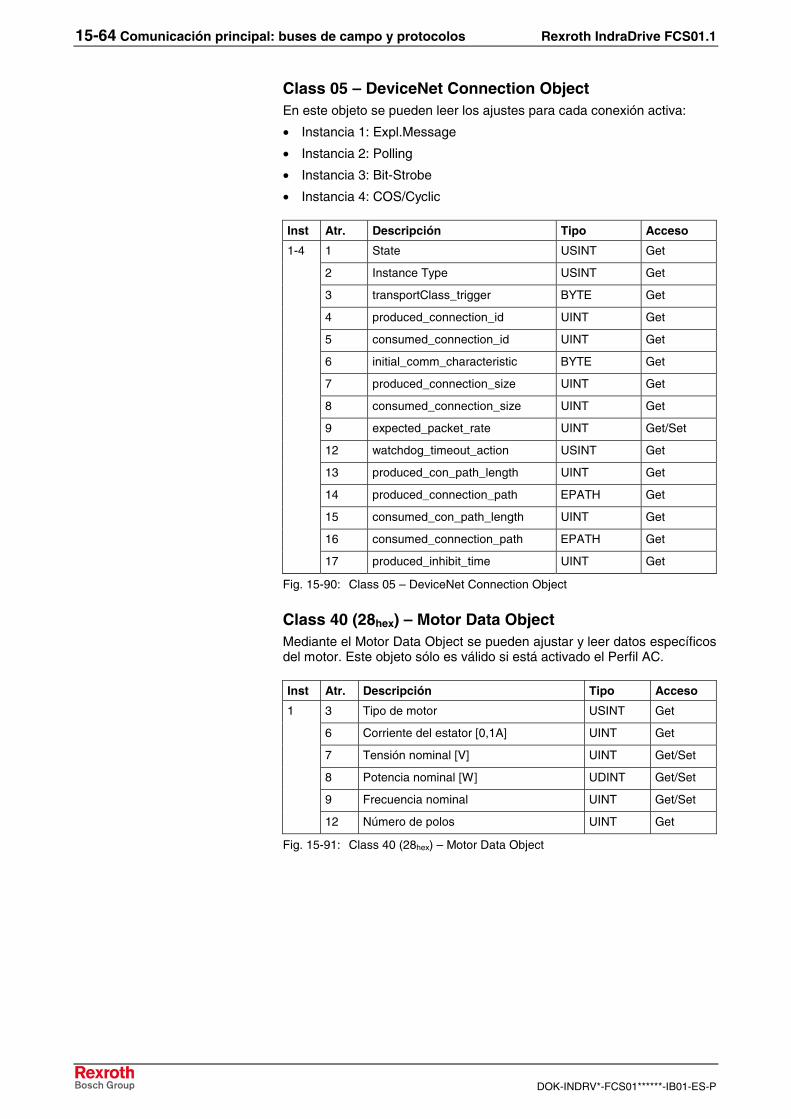
15-64 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Class 05 – DeviceNet Connection Object En este objeto se pueden leer los ajustes para cada conexión activa:
• Instancia 1: Expl.Message
• Instancia 2: Polling
• Instancia 3: Bit-Strobe
• Instancia 4: COS/Cyclic
Inst Atr. Descripción Tipo Acceso
1 State USINT Get
2 Instance Type USINT Get
3 transportClass_trigger BYTE Get
4 produced_connection_id UINT Get
5 consumed_connection_id UINT Get
6 initial_comm_characteristic BYTE Get
7 produced_connection_size UINT Get
8 consumed_connection_size UINT Get
9 expected_packet_rate UINT Get/Set
12 watchdog_timeout_action USINT Get
13 produced_con_path_length UINT Get
14 produced_connection_path EPATH Get
15 consumed_con_path_length UINT Get
16 consumed_connection_path EPATH Get
1-4
17 produced_inhibit_time UINT Get
Fig. 15-90: Class 05 – DeviceNet Connection Object
Class 40 (28hex) – Motor Data Object Mediante el Motor Data Object se pueden ajustar y leer datos específicos del motor. Este objeto sólo es válido si está activado el Perfil AC.
Inst Atr. Descripción Tipo Acceso
3 Tipo de motor USINT Get
6 Corriente del estator [0,1A] UINT Get
7 Tensión nominal [V] UINT Get/Set
8 Potencia nominal [W] UDINT Get/Set
9 Frecuencia nominal UINT Get/Set
1
12 Número de polos UINT Get
Fig. 15-91: Class 40 (28hex) – Motor Data Object
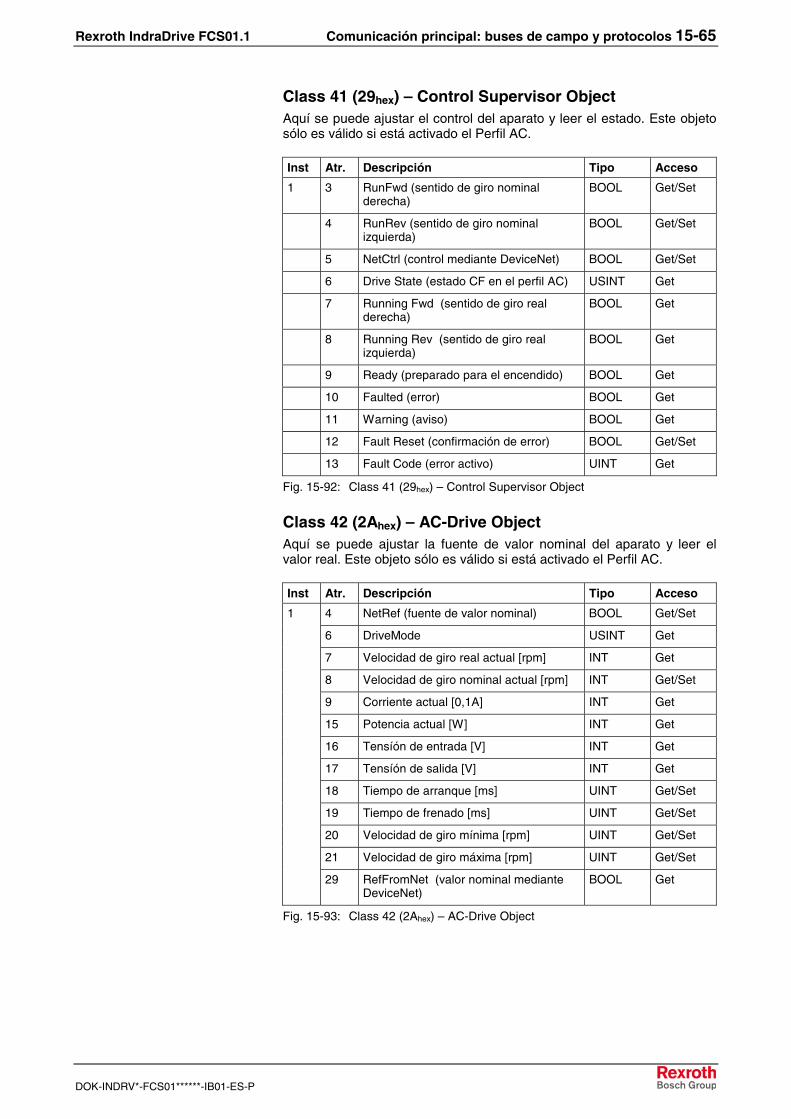
Rexroth IndraDrive FCS01.1 Comunicación principal: buses de campo y protocolos 15-65
DOK-INDRV*-FCS01******-IB01-ES-P
Class 41 (29hex) – Control Supervisor Object Aquí se puede ajustar el control del aparato y leer el estado. Este objeto sólo es válido si está activado el Perfil AC.
Inst Atr. Descripción Tipo Acceso
1 3 RunFwd (sentido de giro nominal derecha)
BOOL Get/Set
4 RunRev (sentido de giro nominal izquierda)
BOOL Get/Set
5 NetCtrl (control mediante DeviceNet) BOOL Get/Set
6 Drive State (estado CF en el perfil AC) USINT Get
7 Running Fwd (sentido de giro real derecha)
BOOL Get
8 Running Rev (sentido de giro real izquierda)
BOOL Get
9 Ready (preparado para el encendido) BOOL Get
10 Faulted (error) BOOL Get
11 Warning (aviso) BOOL Get
12 Fault Reset (confirmación de error) BOOL Get/Set
13 Fault Code (error activo) UINT Get
Fig. 15-92: Class 41 (29hex) – Control Supervisor Object
Class 42 (2Ahex) – AC-Drive Object Aquí se puede ajustar la fuente de valor nominal del aparato y leer el valor real. Este objeto sólo es válido si está activado el Perfil AC.
Inst Atr. Descripción Tipo Acceso
4 NetRef (fuente de valor nominal) BOOL Get/Set
6 DriveMode USINT Get
7 Velocidad de giro real actual [rpm] INT Get
8 Velocidad de giro nominal actual [rpm] INT Get/Set
9 Corriente actual [0,1A] INT Get
15 Potencia actual [W] INT Get
16 Tensíón de entrada [V] INT Get
17 Tensíón de salida [V] INT Get
18 Tiempo de arranque [ms] UINT Get/Set
19 Tiempo de frenado [ms] UINT Get/Set
20 Velocidad de giro mínima [rpm] UINT Get/Set
21 Velocidad de giro máxima [rpm] UINT Get/Set
1
29 RefFromNet (valor nominal mediante DeviceNet)
BOOL Get
Fig. 15-93: Class 42 (2Ahex) – AC-Drive Object
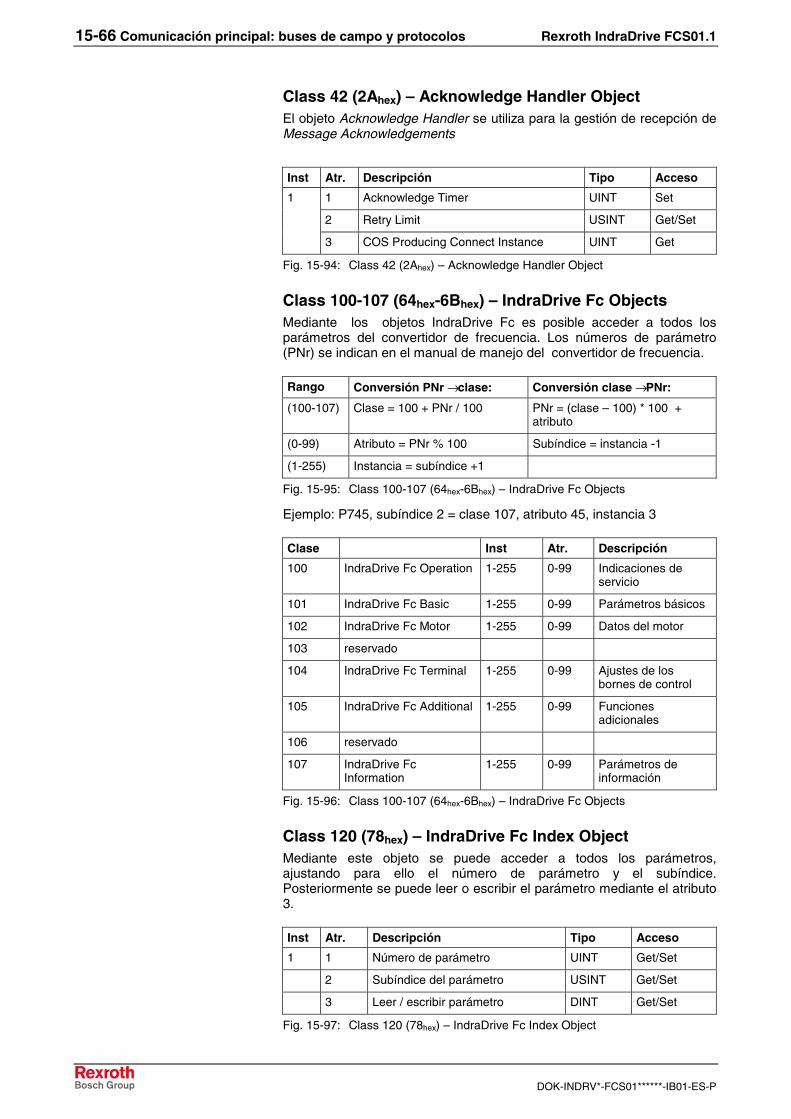
15-66 Comunicación principal: buses de campo y protocolos Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Class 42 (2Ahex) – Acknowledge Handler Object El objeto Acknowledge Handler se utiliza para la gestión de recepción de Message Acknowledgements
Inst Atr. Descripción Tipo Acceso
1 Acknowledge Timer UINT Set
2 Retry Limit USINT Get/Set
1
3 COS Producing Connect Instance UINT Get
Fig. 15-94: Class 42 (2Ahex) – Acknowledge Handler Object
Class 100-107 (64hex-6Bhex) – IndraDrive Fc Objects Mediante los objetos IndraDrive Fc es posible acceder a todos los parámetros del convertidor de frecuencia. Los números de parámetro (PNr) se indican en el manual de manejo del convertidor de frecuencia.
Rango Conversión PNr → clase: Conversión clase → PNr:
(100-107) Clase = 100 + PNr / 100 PNr = (clase – 100) * 100 + atributo
(0-99) Atributo = PNr % 100 Subíndice = instancia -1
(1-255) Instancia = subíndice +1
Fig. 15-95: Class 100-107 (64hex-6Bhex) – IndraDrive Fc Objects
Ejemplo: P745, subíndice 2 = clase 107, atributo 45, instancia 3
Clase Inst Atr. Descripción
100 IndraDrive Fc Operation 1-255 0-99 Indicaciones de servicio
101 IndraDrive Fc Basic 1-255 0-99 Parámetros básicos
102 IndraDrive Fc Motor 1-255 0-99 Datos del motor
103 reservado
104 IndraDrive Fc Terminal 1-255 0-99 Ajustes de los bornes de control
105 IndraDrive Fc Additional 1-255 0-99 Funciones adicionales
106 reservado
107 IndraDrive Fc Information
1-255 0-99 Parámetros de información
Fig. 15-96: Class 100-107 (64hex-6Bhex) – IndraDrive Fc Objects
Class 120 (78hex) – IndraDrive Fc Index Object Mediante este objeto se puede acceder a todos los parámetros, ajustando para ello el número de parámetro y el subíndice. Posteriormente se puede leer o escribir el parámetro mediante el atributo 3.
Inst Atr. Descripción Tipo Acceso
1 1 Número de parámetro UINT Get/Set
2 Subíndice del parámetro USINT Get/Set
3 Leer / escribir parámetro DINT Get/Set
Fig. 15-97: Class 120 (78hex) – IndraDrive Fc Index Object
Rexroth IndraDrive FCS01.1 Eliminación y protección del medio ambiente 16-1
DOK-INDRV*-FCS01******-IB01-ES-P
16 Eliminación y protección del medio ambiente
16.1 Eliminación
Productos Los productos fabricados por nuestra empresa se pueden devolver gratuitamente con el fin de su eliminación. Sin embargo, el requisito es que no contengan ningún tipo de adherencias perturbadoras, tales como aceites, grasas u otras impurezas.
Asimismo, no deben contener en su devolución materiales o componentes extraños inapropiados.
Los productos se deberán entregar con porte pagado a la siguiente dirección:
Bosch Rexroth Electric Drives and Controls GmbH Bürgermeister-Dr.-Nebel-Straße 2 97816 Lohr am Main
Embalajes Los materiales de embalaje consisten de cartón, madera y estiropor. Se pueden recuperar sin problemas en cualquier punto de recogida. Por razones ecológicas se deberá renunciar a devolvernos los embalajes vacíos.
16.2 Protección del medio ambiente
No se liberan materias peligrosas Nuestros productos no contienen materias peligrosas que se pudieran liberar en el uso conforme a lo previsto. Por esta razón, no se deberá temer normalmente un impacto negativo en el medio ambiente.
Materiales contenidos
Aparatos electrónicos Los aparatos electrónicos contienen básicamente:
• Acero
• Aluminio
• Cobre
• Materiales sintéticos
• Componentes y módulos electrónicos

16-2 Eliminación y protección del medio ambiente Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Motores Los motores contienen básicamente:
• Acero
• Aluminio
• Cobre
• Latón
• Materiales magnéticos
• Componentes y grupos electrónicos
Reciclaje Gracias a su elevado contenido en metales, los productos se pueden reciclar en su mayor parte. Para conseguir una recuperación óptima de los metales es necesario desmontarlos en sus distintos módulos.
Los metales contenidos en los módulos eléctricos y electrónicos también se pueden recuperar mediante unos procedimientos de separación especiales. Los materiales sintéticos obtenidos en estos procesos se pueden destinar a un aprovechamiento térmico.
Rexroth IndraDrive FCS01.1 Índice alfabético 17-1
DOK-INDRV*-FCS01******-IB01-ES-P
17 Índice alfabético
A Accesorios 5-1 Accionamientos
advertencias de seguridad 2-1 Acoplamiento de tensión continua 8-14 Ajustes previos 15-4 Ajustes previos CANopen 15-28, 15-44 Ajustes previos DeviceNet 15-59 Almacenamiento 13-1 Almacenamiento prolongado 13-1 Altitud de instalación 13-1 ANSI Z 535 2-3 Apantallamiento 8-7 Archivo maestro del dispositivo
GSD 15-2 Archivos de configuración
EDS 15-2 GSD 15-2
Assembly 15-61
B Bit-Strobe 15-57
C Cable del motor 8-12 Caída de la carga 11-8 Canaleta para cables 7-1 Cargar ajuste de fábrica 11-38 Chopper de frenado 8-2 Ciclos de conexión 13-1 Clases de objetos 15-63 Clases de valores límite 13-10 Combinabilidad 1-4 Compensación del deslizamiento 11-14 Conexión a la red 8-11 Conexión de control 8-17 Conexión de potencia eléctrica 8-9 Conexión del chopper de frenado 8-13 Configuración mínima 10-3 Control de errores 15-5, 15-29, 15-60 Control de frenos 11-8, 11-11 controlar 9-8 CSA 6-1 cUL 6-1
D Datos de proceso 15-8 Datos del motor 10-1, 11-12 Datos técnicos 13-1 Desconexión por sobretensión 8-2 Dimensiones 7-2 Directiva CEM 6-1 Directiva de baja tensión 6-1 Directrices de cableado 8-6 Distancia de parada 11-9 Distancia de parada, constante 11-9 Documentación
abreviaturas 1-2 contenido 1-1 finalidad 1-1 IndraDrive, aplicable 1-3
17-2 Índice alfabético Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
tema principal de los capítulos 1-2 vista general 1-3
E Eficiencia 7-2 Electronic Data Sheet 15-36
EDS 15-2 Elemento de operación de confort 9-9 Eliminación 16-1 Error de carga 12-3 Error de sistema 12-4 Estado de entrega 10-3 Estructura de bus 15-3, 15-27, 15-42, 15-57 Estructura de los datos útiles 15-6 Explicit Message 15-56
F Fallo de fase red 12-3 Fallos 12-1 FCC01.1F-PB1- NNNN 9-22 FCC01.1F-PB2-NNNN 9-22 FCS01 con potencias de 3 kW a 7,5 kW 8-2 FCS01 con potencias de hasta 2,2 kW 8-2 FLR01
Combinaciones admisibles 8-3 Datos eléctricos 8-4 Dimensiones montaje libre 8-5 Dimensiones subestructura 8-5 Interruptor de temperatura 8-4
Frecuencia de impulsos 11-34 frenado dinámico 8-2
G Grupo de menú 11-1 Guía resumida 10-3
H Homologación UL/cUL 6-1 Homologaciones 6-1
conformidad CE 6-1 UL y cUL 6-1
I I/O Messages 15-61 I/O-Messages 15-57 Identity Objekt 15-63 Indicación y manejo 9-1, 12-1 Indicación y manejo de los módulos funcionales 9-1 IndraDrive
documentación 1-3 IndraDrive Fc
combinabilidad con C 1-4 comparación 1-4
Informaciones 11-45 Interfaz CANopen 9-25 Interruptor de corriente de defecto 8-11 Interruptor de temperatura 8-2
L Limitación de la potencia 13-4 Límite de corriente de par 11-10 Límite I2t 12-2 Lista de motor 11-12
Rexroth IndraDrive FCS01.1 Índice alfabético 17-3
DOK-INDRV*-FCS01******-IB01-ES-P
Longitud del cable del motor 8-12
M Maestros PROFIBUS 15-3 Máquinas síncronas 8-10 Materiales 16-1 Mecanismo elevador con freno 11-8 Mensajes de error del elemento de operación de confort 9-19 Modelo de motor 4-1 Modelo de objeto 15-56 Módulo bus CANopen 9-25 Módulo DeviceNet 9-27 Módulos funcionales 5-1 Montaje 7-1 Motor estándar DS 11-12
N Niveles de peligro
según ANSI Z 535 2-3 Normas 1-3
O OFF 12-3
P Palabra de estado 15-11 Palabra de mando 15-9, 15-14 Par de giro derivativo 11-14 Parametrización 9-7 Parámetros adicionales 11-34 Parámetros básicos 10-3, 11-6 Parámetros del elemento de operación de confort 9-16 Pérdida de parámetros 12-3 Pérdidas térmicas 7-2 Perfil AC 15-62 Perfil de accionamiento DS-402 15-38 PKW 15-6 Placa de características 10-1 Polling 15-57 potencia de salida reducida 13-4 Potenciómetro 8-17 Predefined Master 15-56 Profibus 9-22 Profibus DP 15-2 Propiedades 4-1 Protección del medio ambiente 16-1 Protocolo Profibus 15-2 Protocolo USS 15-41 PZD 15-6
R Reciclaje 16-2 Recomendaciones de cableado 8-8 Redes TI 8-11 Regulador de proceso 11-18, 11-32 Regulador de proceso PID 14-2 Resistencia a interferencias 13-10 Resistencia de frenado 8-2, 13-2, 13-3 Resistencias de frenado FLR01 8-2 Restaurar fallo 12-1
S Selección de idioma 9-13
17-4 Índice alfabético Rexroth IndraDrive FCS01.1
DOK-INDRV*-FCS01******-IB01-ES-P
Símbolo de aviso 2-3 Sistema de accionamiento
definición 1-4 elementos del sistema 1-4 presentación del sistema 1-4
Slave Connection Set 15-56 Sobrecorriente 12-2 Sobretemperatura 12-2 Sobretensión 12-2 Su opinión 1-3 Subíndice 15-17 Supervisión de entrada 11-39
T Telegramas ejemplares 15-19 Tensión de referencia 8-17 Tensiones de mando 8-17 tiempo de tránsito preciso del telegrama 15-55 Tiempo de ventilación freno 11-11 Tiempos de telegrama maestro 15-55
U UL 6-1 UL/cUL 13-8 Uso correcto 3-1 Uso no correcto 3-2 USS Time Out 12-3
V Valor nominal 15-13 Valor nominal 1 15-13 Valor real 15-14 Ventilación 7-1 Versión estándar 5-1 Vista general de parámetros 11-52
W Watchdog 11-31, 11-32, 11-33

Bosch Rexroth AGElectric Drives and ControlsP.O. Box 13 5797803 Lohr, GermanyBgm.-Dr.-Nebel-Str. 297816 Lohr, GermanyPhone +49 (0)93 52-40-50 60Fax +49 (0)93 52-40-49 [email protected]
Printed in GermanyDOK-INDRV*-FCS01******-IB01-ES-PR911316960


















