Manipulators Robots2

of 218
Transcript of Manipulators Robots2
-
7/27/2019 Manipulators Robots2
1/218
i
Master Thesis 2011-2012 Industrial Technology Department
Narvik University College
Design of a Hydraulic
Manipulator Arm
Rami Shafik Radwan
Supervisor: Professor Bjrn Solvang
-
7/27/2019 Manipulators Robots2
2/218
ii
To my love ........................................Sohad
To charming smile.............. My daughter
To angle Face..................................My son
-
7/27/2019 Manipulators Robots2
3/218
iii
Preface
This report is the documentation of master thesis in industrial technology
department at Narvik University College
This thesis divided into six main part: introduction part, a part concern on
hydraulic system design, a part concern on kinematic model, a part studying
dynamic model, a part concern on bond graph methodology, and a part for
control.
The report contains a literature survey over ideas of ways to design and control
hydraulic manipulator arm. The kinematic and dynamic model of the robot is
simulated by Matlab. Also the control of robot emerged into interpolator model
to check it.
Finally, I want to thank professor Bjrn solvang who support me and help me to
me to accomplish this thesis. Also the thank for Gabor Sziebig who help me.
The work in this report was done during 2011-2012
-
7/27/2019 Manipulators Robots2
4/218
-
7/27/2019 Manipulators Robots2
5/218
v
List of Figures
Figure
Number
Description page
1-1 Schematic of robot architecture 2
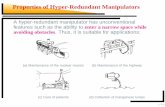
1-2 a Redundant heavy manipulator 4
1-2 b Super Scorpio rov 4
1-3 Schematic of hydraulic system 4
1-4 Hydraulic system and its structure 6
1-5 The principle of speech interface system 91-6 Basic task to motion control 12
1-7 Typical robot joint control 13
1-8 The robot control architecture 14
2-1 The hydraulic manipulator arm 16
2-2 The hydraulic system for 3DOF manipulator arm 18
2-3 Density variation with temperature 19
2-4 Velocity variation for fluid at point 20
2-5 Variation of viscosity with oil temperature 21
2-6 Variation of bulk modulus with temperature for different fluids 22
2-7 schematic of an axial piston motor 24
2-8 The control signal sequence 26
2-9 The components of proportional direction valve 27
2-10 Spool overlap types for proportional direction valves 28
2-11 The components of pressure relief valve 29
2-12 Dual pilot-operated check valves symbol 30
2-13 Bladder accumulator type 38
2-14 Theoretical performance for valve CP722-11 43
3-1 The schematic representation of forward and inverse kinematic 52
3-2 Coordinate rotate around Z axis with angle c 54
3-3 Coordinate rotation around Y axis with angle B 55
3-4 Coordinate rotate around X axis with angle A 563-5 illustrate 3DOF manipulator arm , joint 1 rotate around Z, joint 2
and 3 rotate around Y
58
3-6 Forward Kinematic simulation for joint displacement (0,0,0) 61
3-7 Forward Kinematic simulation for joint displacement (30,30,30) 62
3-8 Projection of 3DOF arm on XY plane 63
3-9 Projection of 3DOF arm on XZ plane 64
3-10 Inverse kinematic simulation with tool center point pose [0.9232
0.5330 0.1536 0 60 30]
65
3-11 a large translation and short re-orientation 66
3-11b large re-orientation and short translation 663-12 Speed acceleration steps to reach PF and Retardation to stop 70
-
7/27/2019 Manipulators Robots2
6/218
vi
3-13 adaptive the breaking distance 71
3-14 Retardation algorithm 73
3-15 Flow chart for the interpolator simulation 75
3-16 The changing of GLR,SL,SL0 during interpolator period 76
3-17 Changing actual speed during interpolator period 77
3-18 Changing remaining distance for tool center point parametersduring interpolator period
78
3-19 Changing tool center point parameters during interpolator period 79
4-1 Valve torque motor assembly 84
4-2 Valve responding to changing in electric input 85
4-3 The load flow through the valve is expressed by the equation 86
5-1 0-junction in bond graph 102
5-2 1-junction in bond graph 102
5-3 Representation of source of effort in bond graph 105
5-4 Representation of source of flow in bond graph 106
5-5 The representation for transform element in bond graph 1065-6 The representation for gyrator element in bond graph 107
5-7 Combination of n single bonds into multibond of dimension n 108
5-8 Array of 1-junction 108
5-9 Pump representation by bond graph 109
5-10 Bond graph representation for relief valve 111
5-11 Bond graph for pump and relief valve unit 112
5-12 Accumulators dynamic 113
5-13 Representation for accumulator by bond graph 114
5-14 Bond graph for filter 114
5-15 a Symbolic configuration of 4/3 proportional direction valve 115
5-15 b The controlling variable restriction for the valve 1155-16 pressure and flow resistant for 4/3 proportional direction valve 116
5-17 Bond graph for 4/3 proportional direction valve 117
5-18 A schematic diagram indicating the flow path in the valve and the
path resistances
118
5-19 A schematic diagram indicating the pressure and flow resistance
Circuit
119
5-20 Bond graph for 3/2 directional valve 119
5-21 Bond graph for hydraulic motor 120
5-22 Bond graph for the hydraulic system of robot 122
5-23 a Multibond for revolution joint 1235-23 b Multibond for prismatic joint 123
5-24 Multiband for 3degree of freedom robot arm 124
5-25 Bond graph for the arm with hydraulic actuators. 125
6-1 Tracking design 130
6-2 Joint 1trajectory result from interpolator procedure 134
6-3 Joint 1 trajectory result from insert the controller into interpolator
Procedure
135
6-4 Comparing the trajectory for joint 1with controller and without
controller
136
6-5 Joint 2trajectory result from interpolator procedure 137
6-6 Joint 2 trajectory result from insert the controller into interpolator
Procedure
138
-
7/27/2019 Manipulators Robots2
7/218
vii
6-7 Comparing the trajectory for joint 2with controller and without
controller
139
6-8 Joint 3trajectory result from interpolator procedure 140
6-9 Joint 3 trajectory result from insert the controller into interpolator
Procedure
141
6-10 Comparing the trajectory for joint 3with controller and withoutcontroller
142
-
7/27/2019 Manipulators Robots2
8/218
viii
List of Tables
Table
Number
Description Page
2-1 Determination of the pipeline friction cofficient 31
2-2 The local loss coefficient for some type of pipes 32
2-3 Example for x = 100 and the hydraulic system application suite 33
2-4 The methods used to install in hydraulic system applications 34
2-5 Comparing between different types of pumps 35
2-6 Comparing between different types of pump 36
2-7 The characters for AE16 motor From Duesterloh 40
2-8 Links parameters 45
5-1 The generalized variable in different domains 100
6-1 Parameters of the Hydraulic Actuator 132
-
7/27/2019 Manipulators Robots2
9/218
ix
List of symbols
1. UPPERCASE
Symbol Description System matrix for the it actuatorAF Actual speed for TCP Input matrix for the it actuator viscous damping coefficient, Kg.m.s/radB(q) The coriolis matrix Isothermal tangent bulk modulus isentropic tangent bulk modulus
3n*n input matrix for the integrated hydraulic robot manipulator
C Capacitor elements Flow coefficientC(q) The centrifugal matrix
DF Modify the constant acceleration into integer
DFn Constant acceleration for TCP Load distribution matrix for the it actuatorG(q) The vector of gravitational forces is n*1 vector
GLR Breaking distance after modify
GY Gyrator element
I Inductor/Inertia elements
The inertia tensor matrix for linkiJ inertia moment Jacobin matrix for frame i according to the base Jacobin matrix for frame i according to the base Flow-pressure coefficient Pressure sensitivity Flow gainL Length of pipeline m
M(q) The inertia matrix is n*n matrix
Driven power for motor kw
Pe Linear momentum, N.sPF Program speed for TCP
Pp Pressure momentum N.s/m
Pt Angular momentum, Nms
Q flow rate, m /s maximum flow rates, m /sQt Theoretical flow rate, m /s
T The torque in the output shaft, N.m
Tc Cushion torque
TF Transformer element
-
7/27/2019 Manipulators Robots2
10/218
x
The load torque acting on the it actuator due to the manipulator Load torque, N.mT Acceleration torque, N.m
Transform matrixR Resistance element Rotation matrix around x Rotation matrix around y Rotation matrix around z Reynolds number 3n*3n system matrix for the integrated hydraulic robot manipulatorSe Source of effort
Sf Source of flow
SL Breaking distance
SL0 Breaking distance after reduce it one speed period Volume mVm Geometric volume of motor, m /rev The vector of coriolis and centrifugal forces is n*1 vector Scalar input to the it actuator Rate of load distribution matrix for the i t actuator 3 x 1 State vector of the ith actuator2. LOWERCASE
Symbol Description
A State space matrix
B Input coefficient vector Christoffel symbolsD Diameter m
E Effort
F Flow
fv Viscosity factor
G Gravity acceleration
K A coefficient vectorM Mass, Kg
nm Motor speed, r.p.m
P Pressure, bar
Q Displacement joint vector Fluid velocity, m/s Desired input.X The six parameters for tool center point
xv Spool displacement
Desired trajectory
-
7/27/2019 Manipulators Robots2
11/218
xi
3. GREEK SYMBOLS
Symbol Description
Angular acceleration for motor shaft rad/s
Bulk modulus.
The number of particles size in upstream filte to the number of particlessize in downstream Motor torque efficiency h Motor hydraulic efficiency m Motor mechanical efficiency Volumetric efficiency Friction coefficient
e Eigenvalues
Angle displacement, rad
Angular velocity rad/s
Angular acceleration rad/s Angular velocity for rotary shaft rad/s Kinematic viscosity m /s Local loss coefficient Fluid density, kg/m Dynamic viscosity Ns/m Shear stress N/m
-
7/27/2019 Manipulators Robots2
12/218
xii
List of Hydraulic Symbol
Pump unit
Variable displacement pump
Fixed displacement pump
Filter
Heater
Cooler
Accumulator
Double action piston
Motor
3/2 Directional valve
4/3 Proportional direction valve
Pressure relief valve
-
7/27/2019 Manipulators Robots2
13/218
-
7/27/2019 Manipulators Robots2
14/218
xiv
List of Abbreviations
DOF Degree of freedom
TCP Tool center point
Notice
The bold letter using in symbols meaning that symbole is vector.
-
7/27/2019 Manipulators Robots2
15/218
xv
Table of Contents
Chapter 1 Introduction ..................................................................................... 1
1-1 Manipulators Robots: .............................................................................. 2
1-2 Hydraulic Manipulator System.................................................................. 3
1-3 Human friendly interfaces..........................................................................6
1-3-1 Speech Interface ................................................................................. 7
1-3-2 Learning from demonstration...............................................................9
1-4 Robot Control Architecture......................................................................11
Chapter 2 Hydraulic system design ................................................................ 152-1 Introduction to Hydraulic system ............................................................ 17
2-2 Hydraulic System components ................................................................ 17
2-2-1 Hydraulic Oil ..................................................................................... 19
2-2-1-1 Oil density ................................................................................. 19
2-2-1-2 Viscosity .................................................................................... 20
2-2-1-3 Specific gravity .......................................................................... 22
2-2-1-4 Bulk Modulus ............................................................................ 22
2-2-1-5 Choosing hydraulic oil ............................................................... 23
2-2-2 Axial Piston Motors ........................................................................... 23
2-2-3 Proportional Direction Valves ........................................................... 27
2-2-4 Pressure Relief Valve ........................................................................ 28
2-2-5 Dual pilot-operated check valves ...................................................... 29
2-2-6 Pipelines ........................................................................................... 30
2-2-8 Filter ................................................................................................. 32
2-2-9 Pump ................................................................................................ 34
2-2-10 Accumulator ................................................................................... 37
-
7/27/2019 Manipulators Robots2
16/218
xvi
2-3 Circuit Design .......................................................................................... 38
2-4 Load Calculation ...................................................................................... 44
Chapter 3 Kinematic model ........................................................................... 51
3-1 Forward Kinematic .................................................................................. 53
3-1-1 Forward Kinematic for 3 DOF ............................................................ 58
3-1-2 Forward Kinematic Simulation .......................................................... 60
3-2 Inverse Kinematic .................................................................................... 62
3-2-1Inverse Kinematic Simulation ............................................................. 65
3-3 Interpolator ............................................................................................. 663-2-1 Speed Calculation ............................................................................. 69
3-3-2Breaking Procedure ........................................................................... 70
3-3-3 Interpolator Simulation ..................................................................... 74
Chapter 4 Dynamic Model ............................................................................... 80
4-1 Dynamic model for 3 DOF manipulator ................................................... 82
4-2Dynamic model for servo-hydro actuators ............................................... 84
4-3 Integration link dynamic models with hydraulic dynamic model ............ 93
Chapter 5 Bond Graph Methodology ............................................................. 98
5-1 Bond Graph Basics .................................................................................. 99
5-1-1 Bond variables ................................................................................ 100
5-1-2 Ports and Bonds .............................................................................. 101
5-1-3 Basic Elements ................................................................................ 103
5-1-3-1 Resistor Element ...................................................................... 103
5-1-3-2 Capacitor Elements .................................................................. 104
5-1-3-3 Inductor/Inertia Elements ........................................................ 104
5-1-3-4 Source of Effort ........................................................................ 105
5-1-3-5 Source of Flow: ........................................................................ 105
-
7/27/2019 Manipulators Robots2
17/218
xvii
5-1-3-6 Transformer Element ............................................................... 106
5-1-3-7 Gyrator Element ....................................................................... 106
5-1-4 Multibond Graphs ........................................................................... 107
5-2 Modeling Hydraulic System ................................................................... 109
5-2-1 Pump .............................................................................................. 109
5-2-2 Pressure Relief Valve ...................................................................... 111
5-2-3 Accumulator ................................................................................... 113
5-2-4 Filter ............................................................................................... 114
5-2-5 4/3 Proportional Direction valve ..................................................... 115
5-2-6 3/2 direction valve: ......................................................................... 118
5-2-7 Motor ............................................................................................. 119
5-3 Links Representation ............................................................................ 123
Chapter 6 Control System.............................................................................. 126
6-1 Control Method .................................................................................... 127
6-2 Simulation ............................................................................................. 132
Concolusion .................................................................................................. 143
Appendix ....................................................................................................... 144
Appendix A .................................................................................................... 14
A-1 Axial piston motor ............................................................................. 146
A-2 Proportional direction valve .............................................................. 149
A-3 3/2 Directional valve ......................................................................... 155
A-4 Inline filter ......................................................................................... 159
A-5 Accumulator ...................................................................................... 162
A-6 Pump ................................................................................................. 164
-
7/27/2019 Manipulators Robots2
18/218
xviii
Appendix B Matlab modeling and simulation .............................................. 168
B-1 Forward kinematic ............................................................................. 169
B-2 Inverse Kinematic .............................................................................. 171
B-3 Interpolator ....................................................................................... 172
B-4 Dynamic Model .................................................................................. 179
B-5 Finding poles for joint 1 ..................................................................... 183
B-6 Control joint 1 .................................................................................... 184
B-7 Finding poles for joint 2 ..................................................................... 189
B-8 Control joint 2 .................................................................................... 190
B-9 Control joint 3 .................................................................................... 192
References .................................................................................................... 194
-
7/27/2019 Manipulators Robots2
19/218
1
Chapter 1
Introduction
I n this chapter, we wil l discussion the industr ial robots and their application,
and then we wil l have a review of types of robot's actuator . From these types,hydraulic actuators will discussion in more details. A human friendly
interaction becomes more and more interesting f ield for robot technology.
Thus we will have a review of human friendly interaction. Also human
fr iendly inter face is very essential part f rom human f r iendly i nteraction. So we
have a look for two types from this interface, first speech interface, and second
learning fr om demonstration. The last paragraph about the basic architecture
control whi ch is a corner stone for buil ding a robot.
-
7/27/2019 Manipulators Robots2
20/218
2
1-1 Manipulators Robots:
Nowadays, the competitions between the manufacturing companies lead to more
automation in manufacturing systems, which requiring less operators
intervention, more flexible and reliability. Using robots in manufacturing systemis good example for flexible manufacturing. They capable to performed many
different tasks and precisely operations (Pires, 2007).
A robot can be define as device able to doing manipulative tasks with object,
tool or end effort, and has capability to reprogramming make it able to
performed different tasks and operations. Therefore a robot considers a complex
system which has a mechanical system providing the suit motion and force to
performing the manipulative operation. The parameters of mechanical systemand the information about the state of mechanical system can obtain by sensors
system, which consist of external and internal sensors. All controlled and saved
in memory by reprogrammed control unit, which gathered the information from
sensors and give the correct signal to the manipulators actuators (Ceccarelli and
Ottaviano, 2008). Figure 1-1 illustrates a schematic of a typical robot system.
Figure 1-1 Schematic of robot architecture
Industrial manipulators robots can classify by the means of driving the actuators
(joint drive systems). Thus we can have three kind of driving system for themanipulators robots:
-
7/27/2019 Manipulators Robots2
21/218
3
1_ Electrical drive system: The joint drive by electrical motors providing
enormous advantages such as simplicity of power supply, availability of
electrical motors, easy control by speed, low energy cost and losses, the ratio of
power producing according to the weight, and high precision engines. But the
electrical drive system is not suitable for explosion areas or in under waterapplication in additional in heavy tools (Morecki and Knapczyk, 1999).
2_Penumatic drive systems: The actuators in pneumatic system driven by using
compressible fluid, usually compressed air. Pneumatic drive systems have
advantages such as the system is very safe to use, availability of air and easy to
release when finished its work, and air has good dynamic properties. However
the most disadvantages is pneumatic drive system use in small and simpleapplication (Morecki and Knapczyk, 1999).
3_Hydraulic drive system: This system use compressed fluid to drive the joint. It
has some advantages like high precision components, very powerful components
compared with its size, easy to store power in accumulator, power transformmedium can use as lubrication and for cooling, and good for use in explosion
areas and underwater application. However it has some disadvantages like the
leakage, loss of power as result of the fluid viscosity, need power pack and the
noise from the power pack, and more safety procedures in the system and
surrounded environment.
1-2 Hydraulic Manipulator System:
Although the electrical drive system is more common in manipulator robots dueto simplicity, but the hydraulic drive system is still preferred in many industrial
tasks to use fluid power advantages. Thus there are no power source can
compete hydraulic drive system when heavy loads must be moved and position
precisely. We can find a hydraulic robot in construction, mining, forming,
forestry industry (Savela and Delta, 2011). Redundant heavy manipulator is an
example of hydraulic robot which was developed in Germany to make
maintenance process on tunnels roof and wall , it can load up to 500 kg in rangto 8 meter. Other famous example for hydraulic robot is 'Super Scorpio rov
which has saved Russian submarine Crew. The manipulator working by
hydraulic system with gripping force reach to 453 kg and the lifting capability at
full extension is 158 kg. Figure 1-2 shows picture for redundant and super
scorpio robots.
In general, the hydraulic system of the manipulator consists of hydraulic
actuators (linear or rotation actuators).
-
7/27/2019 Manipulators Robots2
22/218
4
( a) (b)
Figure 1-2 (a) Redundant heavy manipulator (youngester, 2011)(b) Super Scorpio rov (neptunems, 2012.)
The control of the direction and the displacement of actuators performed by
special kind of direction valve called proportional direction valve. Proportional
valves can control actuators by controlled with the fluid flow inter to the
actuators. Additional devices must be added to the system to ensure on thesecurity and the reliability, such as filters, pressure valves, accumulator, and
cooling/heating system. Figure 1-3 illustrates a schematic drawing of a typical
hydraulic system.
Figure 1-3 Schematic of hydraulic system
-
7/27/2019 Manipulators Robots2
23/218
5
A hydraulic system can be divided into two sections, a power section and a
power signal control.
The power section is consist of three main parts
1- Power supply section is section where the hydraulic power is generatedand convert the electrical power into mechanical and then into fluid
power. Thus electrical motor, pump, gages, reservoir, and protection
circuit are used. In additional some components are used to condition the
working fluid such as cooler, heater, thermometer, and filters.
2- Power control section is controlling with the direction of the fluid flow,the flow rate, the pressure of the fluid, and time of the flow. Generally
there are components perform this tasks such as direction control valves,
flow control valves, pressure valve and non-return valves.
3- Drive section is the part of the system where executes the work and themovement by moving the power from power supply section through
power control system to the components which consist the drive section.
The components formed this section can be hydraulic motors or cylinders
(Merle, Schrader, Thomes, 2003).
The signal control section is divided into two sections:
1- Signal input section is the kind of input signal which must processing inthe next section, so the input signal can be manually, mechanically, or
contactlessly.
2- Signal processing section where the input translate and transfer into topower control section. It can process by electrical means or mechanical
means, but generally in hydraulic robot we use electrical means (Merle,Schrader, Thomes, 2003).
Figure 1-4 shows a hydraulic system sample and the facing section in the
system.
-
7/27/2019 Manipulators Robots2
24/218
6
Figure 1-4 Hydraulic system and its structure
In robotics, the control of a precise position for the joints is more difficultcomparing with electrical drives, where the torque is proportional with electricalcurrent or voltage. While the power control section in the hydraulic manipulator
is proportional with pressure difference and flow rate, in additional some factors
can change according to the change of fluid properties such as viscosity or the
rate of impurities. All of these factors make the modeling and control of such
system a challenging task (Becker,Piestsch, and Hesselbach 2003).
1-3 Human friendly interfaces:
Human friendly interaction is define as the field which interesting to studydedicated to understand designing and evaluate robotic system for use by or
with human.
However, human friendly robots might has two properties; smart interfaces
facilities, easy for use, and safe mechanism. Human friendly robots must have
safety system to ensure that usage people are away from dangerous, thus all jointan movement part must controlled in the manner that prevent dangerous and
accidents ( Heinzmann and Zelinsky,1999).
-
7/27/2019 Manipulators Robots2
25/218
7
Designing the control architecture for human friendly robot might involve
decisions for the responsibility between robot control algorithms and the human
factors. These decisions must insure to minimize the possible damage to people.
However the defining of dangerous/safety situation is different from one
operation circumstances to another, which mean that the safety procedures insome case is safety in other case. Thus to make robot running in safety way the
robot must predicate of the dangerous and harmful situation and running in the
safety way ( Heinzmanny, Matsumotoy, Kieerz, and Zelinskyy,2007).
Human friendly robots will has widely applications such as health care, social
service, personal service, urban search and rescue, and in industrial field. Most
robots operate in manufacturing are manipulator arm, which need expertworkers to deal with their due to the difference control patterns to control with
the changing and various of operation situation, in additional that the robot is
very flexible device which mean that need mastering in setup its configuration
and teach it when there are a changing in operation. Therefore, it will be easy to
deal with in the case of presence a smart friendly human interface which allowsto workers to operate their robots by familiar language or through physical
movements. Smart human interface will remarkably reduce the difficulty of
teach the robot, and the manufacturing lead time ( Zhang, Ampornaramveth and
Ueno,2006)..
There are many software interface has been developed to operate industrial
robots. However, those software deal with control methodologies, such asspeech interface. Next paragraphs will discussion some human friendly
interfaces.
1-3-1 Speech Interface:
The interaction between the human and the machine through talking is idea
spreading in the science fiction where the machines can understand a complex
human sentences, and execute the order coming very accuracy . However this
technology is not very development yet, but of course it will be very useful forrobots and industrial robots. This technology will increase the production
efficiency and agility, faster and cheaper procedures for manufacturing. Thebenefits from using speech interface will performed by the following Speech
interface characters:
The similar between robot interface and the natural humancommunication.
Speech reduces the complexity of using and control with robots.
-
7/27/2019 Manipulators Robots2
26/218
8
Control and operation is possible from simple multirobot interfaces(Pires, 2007).
Speech interface system might be able to determine when the speaker starts
and finishes an utterance. Therefore there are different classes depending onthe type of utterance:
Isolated words: Required from the speaker to wait between utterances,and the processing performing during pause.
Connected words: Is similar to isolated words, but the pause betweenutterance is minimal.
Continuous speech: Allow to operator speak in nature way, and thecomputer determines the contents and the program keywords.
Spontaneous speech: System has ability to handle of changing ofnatural speech. Voice verification/identification: The program can identify specific
user (Pires, 2007).
In general, the user when talking the utterances transform to a software
platform via conductors or wireless. The software translates the utterances
into digital signal which create input signal to the controller. Controller send
electrical signal to motors/valves and operate the arm. Sensors detected the
arm parameters, and send feedback to the software which translated intoutterances user can understanding ( Zhang, Ampornaramveth and Ueno,
2006). Figure 1-6 explains the principle of the interaction between user and
robot through speech interface.
However the speech interface not common in industrial applications for some
reasons likes:
It considers a new technology and not strong enough to use inindustrial.
The industrial environment is noisy environment, which createadditional constrains to it
Industrial systems don't have powerful computer dedicated to humanmachine interface (Pires, 2007).
-
7/27/2019 Manipulators Robots2
27/218
9
Figure 1-5 The principle of speech interface system
1-3-2 Learning from demonstration:
Learning from demonstration is making a robot performing its tasks throughobservation the human movement by development algorithms. It makes
humans able to teach robots new tasks by showing the robot what to do
instead of by programming. The copy of the human movement done by using
special device such as data gloves (Skoglund, Iliev and Palm, 2010). This
technology allows to emulating the human movements and try reproduction
human movements, also allows to operate robots from distance by using
teleoperation system which aim to operate and control robots from distance
to avoid the dangerous situations or to perform work in inhumanly
environment like underwater or space (Hu, Li, Xie, and Wang , 2005).
The problem of imitate the human can divided into four problems or
questions:
What imitate: Here must determine what aspects of demonstration arerelevant to the task.
How to imitate: Meaning the methodologies applying to observationand encoding.
When to imitate: Meaning the agreement problem, which might be toobservation the sequence events then detected whether there aresomething related to the task.
-
7/27/2019 Manipulators Robots2
28/218
10
Who to imitate: Refer to identify to the operator (Billing andHellstrm, 2009)
To generate like this system we need powerful sensor data processing
techniques such as multiple vision systems, laser sensors, structured light,and in some cases especially designed input devices. Thus the demonstrationwill reduce a sequence of sensors reading which translated to mapping and
trajectory, which give the pose for the motor to doing the imitate (S.Ekvall,
2007). Vision system can be used to recognize the position of sensors and
precision control.
In general, the system consist of three main parts
Human operation input: Which allows following the humanmovement, it can be a vision system recording the changing of thesensors, or data gloves. Also input device can provided with additional
sensors to detect the forces, pressure...etc.
Demonstrator: Is a robot program which received data from humanoperation input and shows the robot what to do according to data
gathered. In addition to record the pose of movement, program can
also define the object which grasped, or the pressure, applied to the
object.
Robot system: Is the robot which connected with the demonstrator andemulate the human movement (Skoglund, Iliev and Palm, 2010).
Those parts can provide the sequence of learning process and motion, which
go through:
Sensing: Where sensors or vision system observed and capture themovement.
Recognition: The observed information interpreted and analysis intobasic movement skills.
Generation: The motion is generation from the last step. Simulation: This step is optional, but it offer useful information about
manipulator and correct it before transfer it to real robot (Billing,
2012).
Execute: Robot executes the imitation.Learning by demonstrate can reduce the time and the effort spending in the
traditional way in robot programming, also make robot has the ability to
build Hierarchical structures for knowledge , which open broad prospects of
artificial intelligent.
-
7/27/2019 Manipulators Robots2
29/218
11
1-4 Robot Control Architecture:
A robot control system is an electronic programmable system, responsible to
move and correctly pose to the joints, also control with joint velocity,
acceleration and declaration in accordance with the dynamic model.
In general, there are different ways to programming the robot:
Teach by leading: In this case the operator lead the arm, and the jointvariable is stored in program memory
Teach by pendant: The user move the robot by using joystick, and thepath and velocity is stored point by point. The movement by using
pendant can performing according to different coordinate systems :
First: According to joints coordinates the control performed forin
single joint.Second: According to the base coordinate where the base will be a
reference for end effort (tool center point).
Third: The joystick movement corresponds to end effort coordinate
systemFourth: According to external coordinate system.
Offline programming: A program can be writing in normal computer,after that the program upload to robot. The program informs the robot
about the joints parameters V and tool center point parameter X(Solvang, 2011).
To achieve motion user must inter basic parameters and final parameters, in
general case those parameters are the tool center point start Xi and final Xf
parameters in addition to program speed. Interpolator computes the intermediate
points X+dx and the velocity acceleration and declaration. Coordinate
transformation computes the joints variables according the interpolator outputs.
The outputs of coordinate transformation forming the basic inputs for a servocontrol system which controlling with the motor's joint. Figure 1-7 illustrate the
sequence of the motion tasks.
-
7/27/2019 Manipulators Robots2
30/218
12
Figure 1-6 Basic tasks to motion control
The servo controller considers very complex system which utilizes the data from
interpolator an coordinate transformer to drive the arm. There are many factors
might consider in servo controller such as the dynamic changing and the change
of electrical current. The servo controller connected with pose sensors and
velocity sensors to give the feedback to the controller. Figure 1-8 shows a
typical robot joint control (Pires, 2007).
Input parameters
Interpolation
Servo control
Coordinate
transformation
-
7/27/2019 Manipulators Robots2
31/218
13
Figure 1-7 Typical robot joint control (Pires, 2007)
Figure 1-9 illustrate the hole robot control architecture and which consists of
teaching methodologies which forming the input parameters. Then the motion
control tasks begin as explain above to send data to servo controller whichprovide the accuracy pose to the joints.
-
7/27/2019 Manipulators Robots2
32/218
14
Figure 1-8 The robot control architecture (Solvang, 2010)
-
7/27/2019 Manipulators Robots2
33/218
15
Chapter 2
Hydraulic system design
I n this chapter, we wil l have a looking on the basic components for the robot
hydraul ic system, character istics, and operation methods, how we can choosethe components, and the basic equations which al low fi nding the operation
parameters. Af ter that we wil l applying the information which we had have to
choosing the hydraul ic components for 3 degree of freedom robot arm, and
fi nd their parameters. Finall y we wil l f ind the maximum load can this robot
move.
-
7/27/2019 Manipulators Robots2
34/218
16
The thesis aim to studying and designing a hydraulic manipulator arm with three
degree of freedom by using hydraulic motors. This arm consists of 3 hydraulic
motors which form the arm joints. First joint will turn around Z axis and the
second and third joints will run around Y axis. Figure 1-2 shows the arm
Figure 2-1 The hydraulic manipulator arm
The first part in this chapter will begin with studying the hydraulic components,
characteristics, chosen method and the basic equations. Then we will choose thehydraulic components for the system. Finally we will find the load which arm
can moving.
-
7/27/2019 Manipulators Robots2
35/218
17
2-1 Introduction to Hydraulic system:
Fluid power is the use of fluids under pressure to generate, control, and transmit
power. Fluid power is subdivided into hydraulics using a liquid such as mineral
oil or water, and pneumatics using a gas such as air or other gases. Hydraulicfluid power character with high power transmission comparing with the other
method of power transmission. Thus hydraulic power has some advantages
comparing with other transmission medium:
High ratio of power to mass flow. Fast response and low installed weight. A hydraulic system is relatively simple to construct with fewer moving
parts.
Stepless speed control can be increased by little complex in the system. Force multiplication is possible by increasing actuator area or working
pressure.
In most cases the hydraulic fluid circulated will act as a lubricant andwill also carry away the heat generated by the system (James,John and.
Haberman, 1988), (Watton, 2009).
In general, the mechanical power converts in pump into hydraulic power, which
transmitting by oil to the actuator where the hydraulic power converts into force
or torque to produce work. There are many of control and regulation devices
through away the fluid pass which can control with flow and the pressure of the
oil, and keep oil in the perfect form
2-2 Hydraulic System components:
For 3DOF manipulator arm robot the hydraulic system consist of pump which
increase the oil pressure and deliver it to axial position motors to provide links
angular movement. Velocities and displacements links control can achieve by
proportional direction control valves. Additional components must be added to
the system such as pressure relief valve, and filter which providing the safety for
the system. To ensure that the arm stay in its position after the hydraulic system
stop and no return flow to the oil, check valve added after proportional direction
valve. An accumulator provides flow and pressure to the system when there is a
pressure drop in the system. More details for the systems components will
discussion later. Figure 2-2 shows a hydraulic system for 3DOF manipulator
arm.
-
7/27/2019 Manipulators Robots2
36/218
18
Figure 2-2 The hydraulic system for 3DOF manipulator arm
-
7/27/2019 Manipulators Robots2
37/218
-
7/27/2019 Manipulators Robots2
38/218
20
2-2-1-2Viscosity:
Viscosity is the description the resistance to the laminar movement of two
neighboring fluid layers against each other. It results from the cohesion and
interaction between molecules. It caused by the generation of shear stress over awetted area, and can defined from Newtonian shear-stress equation at point on
the velocity profile (James, John and. Haberman, 1988), as shows in figure 2-4
(2-1)
Figure 2-4 Velocity variation for fluid at point
Where:: Shear stress N/m2: Dynamic viscosity Ns/m
2,
also it can expressed by poise (P), where 1 P = 0.1Ns/m: Fluid velocity m/s2y: Displacement perpendicular to the velocity vector, m
The ratio of dynamic viscosity to the mass density is called kinematic viscosity
(James,John and. Haberman, 1988).
(2-2)Where: Kinematic viscosity m2/s , can expressed in stokes (St) where 1 St =10-4 m2/s: Oil density Kg/m3The oil viscosity is affected by its temperature, as shown in Fig. 2-5. It
decreases with the increase in temperature. Therefore the viscosity is statedat a standard temperature (40C for the ISO specification).
-
7/27/2019 Manipulators Robots2
39/218
21
Figure 2-5 Variation of viscosity with oil temperature. (Shell Tellus,2009)
The oil viscosity has high influence on the hydraulic system performance, and
choosing the part of hydraulic system. It influences by:
Hydraulic losses in pipelines.
Resistance to fluid flow in narrow conduits.
Viscous friction forces and damping effect (Rabia, 2009).
Thus, its important during design considering keep the oil viscosity within a
certain range, otherwise the operation condition will change with temperature
(Watton, 2009).
-
7/27/2019 Manipulators Robots2
40/218
22
2-2-1-3 Specific gravity:
This is the ratio of the mass of a substance divided by the mass of an equal
volume of water at some specfied temperature, usually 20C. The unit is
therefore dimensionless and varies between 0.8 for some petroleumbased fluidsto as high as 1.5 for the chlorinated hydrocarbon (Akers, Gassman and Smith,
2006).
2-2-1-4 Bulk Modulus:
Is an elastic constant giving the amount that the oil volume is reduced for a
given application of pressure. Thus bulk modulus is a measure of a fluid
resistance to being compressed. It depends on pressure and temperature (Akers,
Gassman and Smith, 2006).
Bulk modulus is a measure of the compressibility of a fluid and will be required
when it is desired to calculate oil volume changes for high-pressure, large-
volume systems and dynamic model (Akers, Gassman and Smith, 2006). Bulk
modulus defines the compression of a fluid usually in one of two ways:
Isothermal tangent bulk modulus
(2-3)Isentropic tangent bulk modulus (2-4)Figure 2-6 shows the variation for a range of fluids under perfect conditions with
no pressure and dissolved air (Watton, 2009).
Figure 2-6 Variation of bulk modulus with temperature for different fluids(Watton,2009)
-
7/27/2019 Manipulators Robots2
41/218
23
2-2-1-5 choosing hydraulic oil:
Viscosity is the most important factor when selecting a hydraulic fluid for a
system, and when choosing an oil for system there are some design factors must
considering such as (Brendan, 2005):
starting viscosity at minimum ambient temperature
maximum expected operating temperature, which is influenced by maximum
ambient temperature
permissible and optimum viscosity range for the systems components
Thus the surrounding environment and climate changing during the year play a
critical factor to choosing the corrected oil.
The components in the system must considering when choosing oil. pump
design types and their required viscosity grades. Vane pumps require a viscosity
range of 14 to 160 cSt, while piston pumps require a viscosity range of 10 to 160
cSt. Gear pumps require a viscosity 300 cSt.
Hydraulic fluid has many roles in the operation. These roles range from a heat
transfer medium, power transfer medium and a lubrication medium. The
chemical makeup of a hydraulic fluid can take many forms when selecting it forspecific applications. It can range from full synthetic to water-based fluids used
in applications where there is a risk of fire or environment considerations
(Watton, 2009), (Sumerlin, 2009).
2-2-2 Axial Piston Motors:
The function of hydraulic motors is the reverse of that of the pump. Hydraulic
motors are displacement machines converting the supplied fluid power into
mechanical power
In many applications, the operation speed (e.g. robot, winches, vehicles ) range
between zero to hundreds revolution per minute. In robot application after
considering the rate of harmonic drive gear, the speed of motor must range
between 1 r.p.m to thousands r.p.m, to provide the accurate speed and pose.
There are number of low speed motor design includes axial piston motor, and
radial piston motor. However the motor's type is function for some variables
include: maximum and minimum speed, torque and pressure, shaft side load,fixed or variable displacement, and weight and cost (Chapple, 2003).
-
7/27/2019 Manipulators Robots2
42/218
24
In 3DOF robot, axial piston motor achieve the functions of robot like speed
range, torque weight and cost and provide the best sealing for high input
pressures and work best in high torque.
Figure 2-7 A schematic of an axial piston motor (DesignAerospace, 2011)
An axial piston motoris a piece of equipment that moves several pistons up anddown. The motor typically does this with the displacement motion of pistons,
and that slopes down and then up on one side, this moving rotate the swashplate
which connected with motor shaft.
A typical axial piston motor show in figure 2-7, which consists of a swashplate,
piston, piston shoe, cylinder block or barrel, and valve plate. The pistons are
placed vertically and at an equal distance from each other on top of the
swashplate.
In general, we can chose the motor from the maximum speed and calculate themaximum oil flow, pressure and pressure drop. The motor speed depends on
the flow rate, while the supply pressure depends mainly on the motor
loading torque. For ideal motor the relation between the speed and flow rate (2-5)Where
nm: Motor speed r.p.m
http://www.wisegeek.com/what-is-a-piston-pump.htmhttp://www.wisegeek.com/what-is-a-valve.htmhttp://www.wisegeek.com/what-is-a-valve.htmhttp://www.wisegeek.com/what-is-a-piston-pump.htm -
7/27/2019 Manipulators Robots2
43/218
25
Vm: Geometric volume of motor, m3 /rev
Qt:Theoretical flow rate, m3
/s
Motor performance is function to the flow rate, since there are leakage the motor
speed is less than the theoretical speed. Thus we can define volumetricefficiency of the motor by: (2-6): Volumetric efficiencyQ: Real motor flow rate, m3 /s
Then:
(2-7)Because of the mechanical losses and the hydraulic losses, the output
mechanical power is less than the input hydraulic power. As pressure increases,
leakage increases, speed decreases, and thus the quantity of mechanical energy
delivered to the load decreases. Then the pressure differentiation is
(2-8)Where:: Motor mechanical efficiency h:Motor hydraulic efficiencyT: The torque in the output shaft N.m
p: pressure differentiation bar
The driven power can calculated from the equation
Kw (2-9)(Cundiff, 2002), (Rabie, 2009), (Chapple, 2003).
-
7/27/2019 Manipulators Robots2
44/218
26
2-2-3 Proportional Direction Valves:
Proportional valve is a heart of the hydraulic system, which control with fluid
flow direction. This technology combines the hydraulic transfer of force with
precision and flexibility of electronic control signal. The electrical signal caneffect on the flow rate or the flow direction by displacement the spool. The
change of the flow will influence in the actuators job ( Scholz, 1996). Figure 2-8
illustrate the signal sequence to control actuators by using proportional direction
valve.
An electrical input signal in form voltage converted by amplifier into current
corresponding with the input voltage. The electrical current form an input to
solenoid which produce variable magnetic force , which form an input to the
valve spool as variable displacement, producing proportional certain flow.
Therefore the actuators can run according different flow rate corresponding to
the electrical input signal (Schmitt, 1989).
Figure 2-8 The control signal sequence (Schmitt,1989).
-
7/27/2019 Manipulators Robots2
45/218
27
In the case of the spool shown in the figure 2-9 the spool control close the link
between the ports P, A, B and T. If we need to connected port P and B, port T
and A, Then the solenoid A is energized displacement the spool toward left. The
spring's force displacement the control spool into center position when the
actuator finish its work (Schmitt, 1989).
Figure 2-9 shows the components of proportional direction valve. The major
components are housing (1), proportional solenoid (2), inductive positional
transducer, control spool (4), return spring (5), fluid port (A, B, P, T ).
Figure 2-9 The components of proportional direction valve (Schmitt,1989).
The overlap of the control spool in its housing influences of the flow/ signal
function. Thus we have three types of overlap like in figure 2-10
1- Positive over small electrical signal displacements the spool control but the
flow is remains zero until certain value. The displacement correspond with zeroflow know as dead zone in the flow/signal function.
2- Zero overlap the function of flow/signal is linear function
3- Negative overlap: The flow /signal function in the small valve opening range
result in great shape.
The positive valves has more advantages than the other types like less in leakage
than the other types and the more tolerance in center position in power failure(Schmitt,1989), ( Rydberg, 2008).
-
7/27/2019 Manipulators Robots2
46/218
28
Figure 2-10 Spool overlap types for proportional direction valves ( Rydberg,
2008).
2-2-4 Pressure Relief Valve:
The relief valve (RV) is a type of valve used to control or limit the pressure in a
system which can build up by a process upset, instrument or equipment failure.
All hydraulic system must have at least one of this type. The function of this
valve is established the maximum pressure can developed in the hydraulic
system, which must large enough to overcome of pressure drop in hole system
and achieve the desired output pressure. Without using this type of the valves,
the pressure of the system could rise until damage the machine or the system
parts.
-
7/27/2019 Manipulators Robots2
47/218
29
Figure 2-11The components of pressure relief valve (Control open text
books, 2011)
Figure 2-10 shows schematic of typical pressure relief valve and its components.
When the pressure equal or under the pressure limitation, the spring force
prevent the seat disc from moving up and the forces are balancing in seat disc's
sides. If the pressure exceed, then the pressure force will overcome on spring
force and the seat disc opening allow to oil to flow and return to a tank. In this
design the maximum pressure or limitation can adjust by adjust a spring screwwhich increase or decrease the spring force (Chapple, 2003), (Akers, Gassman
and Smith, 2006).
2-2-5 Dual pilot-operated check valves:
In general, check valve allows oil to flow in one direction, that mean that it
works as electronic diode. A pilot-operated check is similar to a basic check
valve but can be held open permanently by application of an external pilot
pressure signal. Thus dual pilot -operated check valve is valve consists on its
-
7/27/2019 Manipulators Robots2
48/218
30
structure on two pilot operated check valve. There are two pilot pressures each
one work to open its check valve (Parr, 1999).
Figure 2-12 Dual pilot-operated check valves symbol
Check valves have excellent seal leakage in the closed position. So when wedesign a system to hold some load without using check valve, theoretical during
time the load might to stay on hold, but in practice the load tend to creep
because of leakage in the control valve (Parr, 1999).
In robot application it's important to keep the arm in its pose without any
changing pr creeping. So it's important to use check valve
2-2-6 Pipelines:
Pipelines are medium which transmission the hydraulic fluid into the different
parts of the system. The pipeline can effected the system by
Hydraulic friction losses; hydraulic resistance of lines Hydraulic local, or secondary, pressure losses Oil compressibility and elasticity of pipe material; hydraulic capacitance
of lines
Oil inertia; the hydraulic inertia of lines (Rabie, 2009).The proper tube diameter is determined according to the maximum flow rate and
selected fluid speed. Thus:
(2-10)Where:
: The inner pipe diameter
: Maximum flow rates, m3/s
-
7/27/2019 Manipulators Robots2
49/218
31
: Fluid mean velocity, m/s (Rabie, 2009).According to the type of fluid flow and the fabrication of pipe we can define two
type of pressure drop in pipeline.
A- Friction losses: Where the drop of the pressure depended in the surface
roughness in inner pipe, and fluid properties, thus we can define the drop of
pressure from friction losses in the equation:
(2-11)Where:
: Friction coefficientL: The length of pipeline m
d: The diameter of the pipe m: Fluid density kg/m3The friction coefficient is depend on the Reynolds number , the type of flow,
and the surface roughness by the following equations in table 1-2: (Rabie, 2009).
Table 2-1 Determination of the pipeline friction cofficient (Rabia, 2009).
B- Minor loss: It results from the rapid changing in the fluid velocity and the
direction of the flow. The pressure drop is calculation in the following equation:
-
7/27/2019 Manipulators Robots2
50/218
32
(2-12): Local loss coefficientThe local loss coefficient due to sudden expansion is calculated by the followingequation (Rabie, 2009):
2 (2-13)
Table 2-2 Local loss coefficient for some type of pipes (Merkle, Schrader,
Thomes, 2003).
Table 2-2 shows the local loss coefficient due to changing of the direction of
flow can determine for some frequency pipe types use in hydraulic system
(Merkle, Schrader, Thomes, 2003).
2-2-8 Filter:
Filters are an essential component and great significance of every hydraulic
system. Their function is to remove particle contaminants from the hydraulic
fluid, which reduce the service life of system components through abrasive
wear, or formed a suffocation point. Filters function is reducing the rate of
contaminants in acceptable level to protect the hydraulic systems components.
There are many distinction filters according to the grade, like absolute filtersfineness which indicates to the largest particle able to path, or average pore size
which indicate to the average size of particles path through the filters, other
important method is fvalue for given particle size x defined as the number of
particles size in upstream to the number of particles size in downstream (Merkle,
Schrader, Thomes, 2003), (Parr, 1999).
Example for x = 100 and the hydraulic system application suite.
-
7/27/2019 Manipulators Robots2
51/218
-
7/27/2019 Manipulators Robots2
52/218
34
Table 2-4 The methods used to install in hydraulic system applications (Merkle,
Schrader, Thomes, 2003).
Every method will cause a drop in pressure. In pressure line filter the pressure
drop ranging between 1 ~ 1.5 bar. The pressure drop through a filter is the sum
of pressure drop from housing and from filter elements which specified by the
manufacturing, thus
(2-14)
Main flow filter By pass flow filter
Return flow
filter
Pump inlet
filter
Pressure line
filter
Circuit
Diagram
Advantages Economical.Simple
maint-
enance
Protectpump from
contam-
ination
Smaller poresize.
Possible for
valves
sensitive to
dirt
Smaller filterpossible as an
additional filter
Disadvantag
es
Contaminati
on can only
be checked
havingpassed
through the
hydraulic
components
Difficult
access, inlet
problems
with finepored filters.
Result: cavi-
tation
Expensive Lower dirt filtering
capacity
Remarks Frequently
used
Can also
used a head
of the pump
as a coarse
filter
Require
pressure tight
housing and
contaminatio
n indicator
Only part of the
delivery is filtered
-
7/27/2019 Manipulators Robots2
53/218
35
Where fv is viscosity factor.2-2-9 Pump:
A pump is a device which has ability to convert the mechanical energy into
hydraulic energy. There are a wide range of pumps in the market, but there
mechanical design can category into positive displacement pump and variable
and rotodynamic pumps. Also we can category pumps into variable
displacement pump, and fixed displacement pump (Cundiff, 2001). However,
the major aspects in selection pumps involve some factors summaries in the
follow points:
Cost. Pressure ripple and noise. Suction performance. Speed Weight. Displacement. Fluid type. Maximum pressure, flow or power (Chapple, 2003).
Table 5-2 comparing between operation parameters for different types of pumps,which can considering during the design.
Type Maximum
pressure (bar)
Maximum
flow (l/min)
Variable
displacement
Positive
displacement
Centrifugal 20 3000 No No
Gear 175 300 No Yes
Vane 175 500 Yes Yes
Axial piston
(port-plate)
300 650 Yes Yes
Axial piston
(valved)
700 650 Yes Yes
In line piston 1000 100 Yes Yes
Table 2-5 Comparing between different types of pumps (Parr, 1999)
-
7/27/2019 Manipulators Robots2
54/218
36
For comparing between the different type of pump, and the advantage and
disadvantages for each one and what is suitable for the application we can use
table 2-6
Gear Pump External type Internal type Other feature*Low cost
*Lowcontaminate
sensitivity
*Compact ,low
weight
*Good suction
performance
*Low noise
* Lowcontaminate
sensitivity
*In-line assembly
for multi pumpunits
Vane Fixed
displacement
Variable
displacement
*Low noise
*Good service
ability
*Low noise
*Low cost
*Goode service
ability*displacement
contols
*In-line assembly
for multi pump
units
Piston Fixed and variable displacement
*High efficiency
*Good service ability
Wide range of displacement control
*Integral boost
pump and multi
pump assemblies
*Can use mosttype in hydrostatic
transmission.
Table 2-6 Comparing between different types of pump (Rabia, 2009)
In robotic application, the pump will frequency operates under load or less than
nominal load. For avoid failed in the system or heating the oil which will reduce
the system reliability, we must choose variable displacement pump.
Variable displacement pumps provide wide range of control methods; include
load sensing, pressure compensation, power and torque sensing and limitation,
in additional control by electro-hydro device. In the term of profit, variable
displacement pump reduce the operation cost and reliability of the system, and
-
7/27/2019 Manipulators Robots2
55/218
37
reduce the system maintenance and increase the overall system efficiency
(Chapple, 2003).
The ideal flow from pump can achieve from the formula:
(2-15)Where:: The ideal flow from pump m3/sV: Volumetric displacement m
3/rev
: rotational speed rad/s
By considering the leakage from the pump, and is the volumetric efficiency (2-16)2-2-10 Accumulator:
Accumulator is a mean for storage energy, which can storage and release a
quantity of fluid at required system pressure. The storage of energy done when
the system is under load (Parr, 1999).
Often, accumulator installed in the system when:
Needing emergency supply. Leakage compensation. Required volume changes compensation due to temperature or pressure. Supposing system work frequency under load. Shock alleviation. There are simple suspension elements. Pulsation absorption. Supplementation of pump flow to meet high transient flow demand
(Chapple, 2003)
Figure 2-13 shows accumulator bladder type, where the bladder separates the
oil from pressure gas, usually is nitrogen. The gas supplied via valve with a pre-
charge pressure determine by the pressure range requirements for the system.
When the accumulator in storage phase. The gas does not flow in the bladderand the oil filling the accumulator. Where gas flow by rate proportional with the
-
7/27/2019 Manipulators Robots2
56/218
38
required oil pressure/flow in the system when we need to release oil from
accumulator, this gas push the oil to go out from the accumulator and feed the
system.
Figure 2-13 Bladder accumulator type (Brendan, 2009)
The accumulator is charged to a pressure p0 lower than the minimum pressure
operation p1. For gas has mass m and absolute temperature T and volume V, by
assuming the gas expansion polytropic, then:
(2-17)
(2-18)Where:
n: Polytropic index
R: Universal gas constant.
When the pressures fall in the system, the gas expansion and deliver V volume
of oil to the system
-
7/27/2019 Manipulators Robots2
57/218
39
(2-19)Where
V2: Maximum operation volume.
For comprising from V0 to V2: (2-20)Then
(2-21)Also for gas expansion from V1 to V2 with polytrophic index n2 (2-22) (2-23)This equation gives the conservative value for most application.
2-3 Circuit Design:
Figure 2-2 shows the hydraulic system for 3DOF manipulator arm. A pump
provides hydraulic fluid with operation pressure to the system. A pressure relief
valve and filter connecting to the system to safety insurance for the systems and
components. An accumulator storage the energy when the arm be under load
and compensates the system with fluid when it require that. A 3/2 direction
valve has on/off function for the system. The oil flow from 3/2 direction valve to
three 4/3 proportional direction valves, where each one control with the
direction and speed of one motor by controlling with the pass and flow quantity.
Motors:
The circuit design will begin by choosing the three motors and calculate their
parameters, after that finding the pressure drop in every part in the system to
choosing the correct pump.
Each joint is an axial piston motor provide the require rotation movement for the
link. The speed for robot tool center point might vary from very low speed toabout 1 m/s as maximum speed.
-
7/27/2019 Manipulators Robots2
58/218
40
Thus for choosing motor there are some aspects might be considering such as
the range of motor speed, the weight, the torque. For this reason, motors AE16
from Duesterloh has been chosen where this type of motor has speed range from
very low speed, and light weight with high torque. Table 2-7 shows the major
characters for AE16 motor, for more details see appendix A-1 (Duesterloh
Fluidtechnic,2005).
Table 2-7 The characters for AE16 motor From Duesterloh
The calculation of system parameters will be concentration on the maximum
flow/ speed/
From equation 2-7
Weight kg Kg 13
Displacement cm3/rev 16
Max.Operating pressure Bar 250
Max. Speed r.p.m 2500
Min. Speed r.p.m 5
Max. Torque N.m 57,2
max.Capacity Kw 9,6
Total efficiency 96%
-
7/27/2019 Manipulators Robots2
59/218
41
The maximum pressure drop in the motor can achieved from equation 2-8
From table the maximum operation pressure (inlet pressure) is:
P1= 250 bar
Then the outlet pressure:
p2= 16 bar
Each motor need 250 bar to operate at the maximum speed, and the high
pressure oil might deliver to motors from pump. According to the drop pressure
in the system parts the pump pressure must be higher than this value, to know
how much pump pressure we must find the drop of pressure in hole system:
1-The pipeline between the motors and proportional direction valves: If
considering the length of pipeline is d=5 meters with diameter L= 10 mm., the
density of oil 850 kg/m3 and kinematic viscosity= 1*10-4 m2/s. Then:
v=/2*pi*d) =1.32 m/sReynolds number can determine the type of flow if turbulence or laminar flow
66By using table 2-1 for laminar flow we find
-
7/27/2019 Manipulators Robots2
60/218
42
From equation finding the pressure drop
By assuming that, the system from proportional valves to motor needs 6
junctions forming in 90o
and according to table 2-2 we find From equation we can find the pressure drop on junctions
1-The pipeline between the pump and proportional direction valves
Between proportional valves and pump there is one line feed the three
proportional valves with oil, By assuming that the flow from each valve to the
motor are equal, then the flow in this line will be: 0,0416+0,0416+0,0416= 0,1248 m3/sThen to find the pressure drop in pipeline before the proportional valves, and by
assuming that pipelines length is 5 meter with diameter 10 mm. By flow thesame procedure above we find that
v= 3.97
Re=198.5
=0.332
Also we assume that the line consists of 6 junctions in 90o
form, then The total drop pressure in pipeline is 5.922 bar
-
7/27/2019 Manipulators Robots2
61/218
43
3-pressure drop in proportional valves:
We choosing Proportional direction valve from bosch Rexroth group with type
4WRPE 6with size 10 we find the pressure drop in the valve is 5 bar (bosch
Rexroth group, 2001). For more details you can see appendix A-2 bar3-The pressure drop in 3/2 direction valve:
We must considering during choosing the operation parameters for the valve the
nominal flow large or equal the total flow or:
Q>= Q1+Q2+Q3=125,9 l/min
Where:
Q1, Q2, Q3: The flow in motor 1, motor2 and motor 3
Also the pressure must be larger than the total pressure to the valve, which,
mean the nominal pressure for the valve >= the inlet pressure on the motor+ the
drop pressure after the 3/2 direction valve to the motor
Then we choose
Nominal pressure> 300 bar
We choose the valve CP722-11from (Sauer-Danfos). For more details see
Appendix A-3 (Sauer-Danfos, 2007)
In figure 2-14 we can find the pressure drop in the valve according to maximum
operation parameters
Figure 2-14 Theoretical performance for valve CP722-11(Sauer-Danfos, 2007)
-
7/27/2019 Manipulators Robots2
62/218
44
From figure we can see that the pressure drop in the valve 4- Pressure drop in the filter:
According to table 2-3, the suitable filter must has = 2-5. And according to
table 2-4 we need pressure inline filter. The operation pressure must be larger
than the pressure in the rest of the system. So we choose the filter350LEN0160-
H3XLA00-V5, 0-M -.which allow to maximum pressure until 350 bar and has =
2. The drop in pressure which happen through the filter according to appendix
A-4 (Bosch Rexroth group, 2011)
1bar .PUMP
From last discussion, we can choose the pump which has outlet pressure equal to
the motor inlet pressure+ drop pressure in the system
250+27.922=277.922 barAlso the outlet flow must equal to the total flow Q=124.9 l/min.Thus we choose the variable displacement pump A4VSOfrom Bosch Rexroth
group see appendix A-6 which has outlet pressure 300 bar, and flow rate 225
l/min (Bosch Rexroth group, 2002.)
Accumulator:
We choose accumulator which performance the maximum pressure we need.
Thus we choose accumulator can give operation pressure 350 bar after punch,
which is HAD..-1X/2X from bosch Rexroth group (Bosch Rexroth group ,
2012). For more details see appendix A-5
2-4 Load Calculation:
The hydraulic manipulator arm which will studying and designing consist is 3
degree of freedom (3DOF), consist of three rotation joints. Base joint rotate
around z axis and the second and third joint rotate around y axis. Each joint
-
7/27/2019 Manipulators Robots2
63/218
45
rotate by axial piston motor, the rotation speed and the direction of rotation for
the motors will controlled by proportional direction valves. Figure 2.2 shows the
hole hydraulic system for the arm. However this motor moved three rigid
aluminum cylindrical links. Table 2-8 shows the properties for the link.
Link number Length ; m Diameter ; m Weight ;kg
1 1 0.2 85
2 1 0.2 85
3 0.4 0.2 34
Table 2-8 Links parameters
In general the speed of robot's tool center point must be not high and might
average between 0,001 m/s to 1 m/s
To calculate the maximum load for the robot we must calculate the maximum
load for each motor then chose the minimum load. In order to reduce the
revolution speed for the motor we will use harmonic drive systems with rate
1/160.
For motor 3:
The maximum revolution speed for the link after harmonic drive system(Hibbeler, 2010):
r.p.m (2-24)Then the angular velocity for link 3
rad/s (2-25)Then the maximum velocity for tool center point is: m/s (2-26)The minimum revolution speed for the link after harmonic drive system:
r.p.mThen the angular velocity for link 3
rad/s
-
7/27/2019 Manipulators Robots2
64/218
46
Then the minimum velocity for tool center point is: m/sThe total torque applied in motor 3 is a sum of three types of torques
TL : Load torque which is the torque required to support the weight or force of
the load (Watford, 2005).
(2-27)Maximum load torque done when cos =1. Then equation 2-11 will be
(2-28)Where
mlmax : The maximum load mass
g: gravity acceleration
ml3: the mass for link 3
T: Acceleration torque is the torque required to overcome the inertia of the load
in order to provide a required acceleration or deceleration (Watford, 2005). (2-29)Where
JL3: The inertia moment for link 3 around connection point with motor 3
(2-30)Jload: The inertia moment for load around connection point with motor 3 (2-31)By compensation (2-30), (2-31) in (2-29) :
(2-32)
-
7/27/2019 Manipulators Robots2
65/218
47
Tc: Cushion torque is the torque that the actuator must apply to provide a
required angular deceleration, *. Cushion torque is generated by restricting the
flow out of the actuator in order to create a back pressure which decelerates the
load (Watford, 2005).
(2-33) (2-34)Tf: Friction torque is the torque required to overcome any friction between
moving parts, especially bearing surfaces. We will consider the friction torque
equal 0
Thus the total torque is (Watford, 2005): (2-35)By compensation equations (2-28), (2-32) and (2-34) in (2-35) find:
(2-36)The maximum torque for the motor is 57,3 N.m then, the maximum torque for
link 3 is. Then the maximum torque for links by respect the gear ratio:
Ttmax= 160*57,3= 9168 N.m
By applied this value in equation 2-20 we can find the maximum load for link 3
m=2624 kg
Motor 2:
The maximum revolution speed for the link after harmonic drive system:
r.p.m
Then the angular velocity for link 3
-
7/27/2019 Manipulators Robots2
66/218
48
rad/sThen the maximum velocity for tool center point is:
m/sThe minimum revolution speed for the link after harmonic drive system: r.p.mThen the angular velocity for link 3
rad/s
Then the minimum velocity for tool center point is: m/sIn the same way we can find the torques for motor 2
Then
mlmax2= 398 kg
Motor 1:
-
7/27/2019 Manipulators Robots2
67/218
49
r.p.mThen the angular velocity for link 3
rad/sThen the maximum velocity for tool center point is: m/sThe minimum revolution speed for the link after harmonic drive system:
r.p.m
Then the angular velocity for link 3
rad/sThen the minimum velocity for tool center point is: m/sThe torques:
mlmax= 442 kg
-
7/27/2019 Manipulators Robots2
68/218
50
the maximum load for the arm
mlmax= min(mlmax1,mlmax2,mlmax3) = 398 kg
-
7/27/2019 Manipulators Robots2
69/218
51
Chapter 3
Kinematic model
The kinematic model is essential in robot studying and for path planning. By
kinematic model the coordinates and orientations for tool center point can bedetermining by knowing the displacement of joint, which know the forward
kinematic. While by applying inverse kinematic, the join ts displacement can be
known according to tool center point coordinates and orientations. Last part
from this chapter wil l studying the interpolator, which can planning the path
for tool center point f rom one point to another by dividing it into small steps
and give the sui table velocity and acceleration for each step.
-
7/27/2019 Manipulators Robots2
70/218
52
The term of kinematic model for manipulator arm refer to the studying of the
geometry of manipulator. The kinematic model is a fundamental tool in design
and control with manipulator robot.
The purpose of a manipulator is to manipulate the tool center point for the robot,to performance that the robot must to know where the object to work on is
located, and what is located of tool center point. Thus robot kinematics studies
the relationship between the dimensions and connectivity of kinematic chains. In
other word, kinematic model describes the position and the orientation (pose),
velocity, acceleration and all higher order derivative of the pose.
The robot kinematics can be divided into forward kinematics and inverse
kinematics. Forward kinematics problem is straightforward and there is no
complexity deriving the equations. Hence, there is always a forward kinematics
solution of a manipulator. Inverse kinematics is a much more difficult problem
than forward kinematics. The solution of the inverse kinematics problem is
computationally expansive and generally takes a very long time in the real time
control of manipulators.
The relationship between forward and inverse kinematics is illustrated in Figure
3-1
Figure 3-1 The schematic representation of forward and inverse kinematic
The studying of dynamic model will involve:
Forward kinematic: Inverse kinematic:
Interpolator:
-
7/27/2019 Manipulators Robots2
71/218
53
3-1 Forward Kinematic:
A manipulator robot consists of a serial number of links which are affixed to
each other by revolution joints or prismatic joints. This serial begin from the
base of robot to the end effort (tool center point). The function of forwardkinematic is finding the pose of tool center point according to joints
displacement in the Euclidean space.
The minimum number of coordinates required to locate a body in Euclidean
space is six, three coordinates for position, and three for orientation. Thus we
can find the location of tool center point in the space by finding the six
coordinates. By considering the joints which connected each point from base to
the tool center point, then we can define the forward kinematic problem as:
if we have the joint displacement q , then the pose of tool center point (Solvang,
2010):
x=f(q, L) (3-1)
Where:
L: The length of link
q=[q1 q2 q3...qn]
x=[X Y Z A B C]
Where
q1, q2...qn : Displacement of joint 1, joint 2..
x: The six parameters for tool center point.
A: The rotation around x axis.
B: The rotation around y axis.
C: The rotation around z axis.
-
7/27/2019 Manipulators Robots2
72/218
54
The displacement of tool center point is result from the joint displacement, and
to determine the change of orientation we have to select a convention of
orientation. This can done by Euler angles. Which are three angles introduced by
Leonhard Euler to describe the orientation of a rigid body.
We can find the relationship between the rotation frame simply by finding the
rotation around X,Y,Z (Solvang,2010).
Figure 3-2 shows the coordinate rotation around Z or C angle
Figure 3-2 Coordinate rotate around Z axis with angle c
Then we can write the rotation matrix as (Solvang, 2010):
(3-2)
Where:
n: Describe X axis for frame 0 in frame 1
-
7/27/2019 Manipulators Robots2
73/218
55
s: Describe Y axis for frame 0 in frame 1
u: Describe Z axis for frame 0 in frame 1
In the same way figure 3-3 shows the coordinate rotation around Z or C angle
Figure 3-3 Coordinate rotation around Y axis with angle B
Then the rotation matrix around Y can write as (solvang, 2010):
(3-3)
Figure 3-4 shows the rotation around X
-
7/27/2019 Manipulators Robots2
74/218
56
Figure 3-4 Coordinate rotate around X axis with angle A
Then rotation matrix:
(3-5)
By multiply the matrixes we get the general rotation matrix from frame (i-1) toframe (i)
(3-6)By considering the three coordinates for position we can write the general
transform matrix from frame i-1 to i
-
7/27/2019 Manipulators Robots2
75/218
57
(3-7)
The last column of the last matrix was added to the general form to has
symmetric matrix (Solvang, 2010)
Thus, the transform matrix can be writing in the form
(3-8)
So we can move frame one frame to another by multiply the transformation
matrix to the frame. Which meaning, the transform matrix to robot's tool center
point has n link (3-9)This matrix can write as following:
(3-10)
From this matrix we can drive the six parameters [X Y Z A B C], or in other
world solve the forward kinematic problem (Solvang, 2010)
X=r41 (3-11)
Y=r42 (3-12)
Z=r43
(3-13)
(3-14)
(3-15)
-
7/27/2019 Manipulators Robots2
76/218
58
3-1-1 Forward Kinematic for 3 DOF:
The manipulator arm consist of 3 joint first joint rotate around z axis with
displacement q1 and the second and third rotate around y axis with
displacements q2, q3. There are three links in the arm, first link has length L1connecting joint 1 and joint 2, the second joint has length L2 and connecting the
second joint with third joint, where the third joint which has length L3
connecting the joint 3 with tool center point.
.Figure 3-5 shows the orientation of manipulator arm consist of three joint, and
how the coordinates changing according to the joints revolution.
Figure 3-5 illustrate 3DOF manipulator arm, joint 1 rotate around Z, joint 2
and 3 rotate around Y
From equation we can write:
(3-16)
-
7/27/2019 Manipulators Robots2
77/218
59
Where:: The transform matrix from joint 1 to the base
: The transform matrix from joint 2 to joint 1
: The transform matrix to joint 3 according joint 2
(3-17)Where
c1=cos(q1)
s1=sin(q1)
(3-18)
Where:
c2= cos(q2)
s2=sin(q2)
(3-19)c3=cos(q3)
s3=sin(q3)
-
7/27/2019 Manipulators Robots2
78/218
60
(3-20)
Then from equation (3-16)
(3-21)
Where:
c23=cos(q2+q3)
s23=sin(q2+q3)
3-1-2 Forward Kinematic Simulation:
Appendix B-1 consist Matalb function to simulate 3DOFmanipulator arm
by displacement (q1,q2,q3)= (0, 0 ,0). In simulation we suggested that
L1=L2= 1 m, L3=0.4 m
we will have result in figure
-
7/27/2019 Manipulators Robots2
79/218
61
Figure 3-6 Forward Kinematic simulation for joint displacement (0,0,0)
By joints displacements (q1,q2,q3)=(30,30,30), then figure shows the result
-
7/27/2019 Manipulators Robots2
80/218
62
Figure 3-7 Forward Kinematic simulation for joint displacement (30,30,30)
3-2 Inverse Kinematic:
From its name, the inverse kinematic is the opposite problem for forward
kinematic. Which mean that the inverse kinematic problem is centering about
finding the joint displacements from knowing tool center point coordinates and
orientation. In other world:
(q)=f(X, L) (3-22)
The inverse kinematics problem of the serial manipulators has been
studied for many decades. Solving the inverse kinematics is computationallyexpansive and generally takes a very long time in the real time control of
manipulators.
Cartesian space includes orientation matrix and position vector. However, joint
space is represented by joint angles. The conversion of the position and
orientation of a manipulator tool center point from Cartesian space to joint space
is called as inverse kinematics problem. There are about three methods to solve
this problem, but in this repor