MADISON A COMPARATIVE ANALYSIS AIRFLOW AROUND ROCKET...
41
December 5 th of 2008 First Row: Tenzin, John, Ben, Henry, Alec Second Row: Connie, Zoë, Ruijun, Maia http://www.westrocketry.com SLI 2009 Preliminary Design Review MADISON WEST ROCKET CLUB ACOMPARATIVE ANALYSIS OF AIRFLOW AROUND A ROCKET
Transcript of MADISON A COMPARATIVE ANALYSIS AIRFLOW AROUND ROCKET...

Madison West High School SLI 2009 PDR
- 1 -
December 5th of 2008
First Row: Tenzin, John, Ben, Henry, Alec Second Row: Connie, Zoë, Ruijun, Maia
http://www.westrocketry.com
SLI 2009 Preliminary Design Review
MADISON
WEST
ROCKET CLUB
A COMPARATIVE ANALYSIS OF AIRFLOW AROUND A ROCKET

Madison West High School SLI 2009 PDR
- 2 -

Madison West Rocket Club SLI 2009 PDR
- 3 -
Table of Contents
Summary of PDR Report .............................................................................................. 5
Team Summary.................................................................................................5
Teachers/Mentors .............................................................................................5
Launch Vehicle Summary .................................................................................5
Payload Summary .............................................................................................5
Changes made since Proposal .................................................................................... 6
Changes made to Vehicle Criteria.....................................................................6
Changes made to Payload Criteria....................................................................6
Changes made to Activity Plan..........................................................................6
Vehicle Criteria.............................................................................................................. 7
Selection, Design, and Verification of Launch Vehicle ......................................7
Mission Statement, Requirements, and Mission Success Criteria .................7 Major Milestones Schedule............................................................................8 Design Review at System Level and Required Subsystems .........................9
Entire Vehicle ..................................................................................................10
Sustainer .........................................................................................................11
Performance Characteristics for the System................................................14 Verification Plan and Status.........................................................................14 Matrix Legend..............................................................................................15 Risks and Mitigations...................................................................................16 Manufacturing, Verification, Integration, and Operation Plans.....................19 Confidence and Maturity of Design..............................................................19
Recovery Subsystem ......................................................................................19
Mission Performance Predictions ....................................................................19
Vehicle requirements and objectives...............................................................23
Payload Integration .........................................................................................23
Launch Operation Procedures.........................................................................23
Launch System............................................................................................23 Final Assembly and Launch Procedures .....................................................23 Disarming Procedure (only if motor doesn’t ignite) ......................................24

Madison West Rocket Club SLI 2009 PDR
- 4 -
Safety and Environment ..................................................................................24
Safety Officer ...............................................................................................24 Risks and Mitigations of Personnel Hazards................................................24 Environmental Concerns .............................................................................24
Payload Criteria........................................................................................................... 25
Selection, Design, and Verification of Payload Experiment.............................25
Payload System...........................................................................................25 Payload Subsystems: ..................................................................................25 Performance Characteristics and Verification Matrix ...................................29 Verification Plan and Status.........................................................................30 Preliminary Integration Plan.........................................................................30 Precision of Instrumentation, Repeatability of Measurement and Recovery System.........................................................................................................32
Payload Concept Features and Definition .......................................................33
Creativity and Originality..............................................................................33 Uniqueness and Significance.......................................................................33 Suitable Level of Challenge .........................................................................33
Science Value .................................................................................................34
Science Payload Objectives ........................................................................34 Payload Success Criteria.............................................................................34 Experimental Logic, Approach, and Method of Investigation, Variables, Controls and Correlations ............................................................................35 Test and Measurement................................................................................36 Relevance of Expected Data, Accuracy and Error Analysis ........................36 Preliminary Experiment Process Procedures...............................................36
Safety and Environment ..................................................................................37
Safety Officer ...............................................................................................37 Risks and Mitigations of Payload .................................................................37 Environmental Concerns .............................................................................37
Activity Plan ................................................................................................................ 38
Budget.............................................................................................................38
Timeline...........................................................................................................39
Outreach Summary .........................................................................................40
Conclusion .................................................................................................................. 41

Madison West Rocket Club SLI 2009 PDR
- 5 -
Summary of PDR Report
Team Summary
Senior Members of Rocketry Program Madison West High School 30 Ash St. Madison WI, 53726
Teachers/Mentors
Ms. Christine Hager Main Advisor, Educational Supervisor Dr. Pavel Pinkas NAR Mentor, Scientific Advisor Mr. Scott Goebel NAR Mentor, High Power Rocketry
Advisor Mr. Brent Lillesand NAR Mentor, Vehicle Construction
Supervisor Prof. Dan McCammon Dept. of Physics, Scientific Advisor Professor Riccardo Bonazza Dept of Engineering Physics, Wind
Tunnel Experiments Supervisor Mr. Don Michalski Space and Astronomy Lab,
Electronics Advisor Mr. Rehan Quraishi Junior Mentor, Vehicle Design
Advisor
Launch Vehicle Summary
We will use a two stage vehicle for our experiment. We are measuring the characteristics of the airflow around the rocket and a two stage vehicle will provide us with two different flight profiles (a slower and short first stage boost followed by a fast second stage boost and coast). The rocket will be 158in long, 6in booster diameter, 4in sustainer diameter, the liftoff weight 38lbs (sustainer only is 13lbs). The proposed vehicle and the propulsion options are discussed in detail below. The propulsion is K-class motor (for the booster) and J-class motor (for the sustainer). The vehicle can launch from a standard launch rail and does not need more than 10ft of launch guidance to achieve the stable flight velocity.
Payload Summary
We will measure airflow disturbances around our rocket around our obstacles on the rocket body. The data will be collected using temperature and pressure sensors placed in strategic locations on the rocket body. The data will be saved in nonvolatile memory by the control electronics. In addition to collecting data during rocket flight, the rocket will be tested in a wind tunnel and the data collected in the wind tunnel will be contrasted with the data measured during an actual rocket flight.

Madison West Rocket Club SLI 2009 PDR
- 6 -
Changes made since Proposal
Changes made to Vehicle Criteria
Added major milestones for vehicle construction, updated list of parts and materials used, added verification matrix for the vehicle, started calculations and planning of the recovery system and added first draft of the launch and operation procedures.
Changes made to Payload Criteria
Started design of data acquisition electronics, added verification matrix for the payload, added preliminary integration plan of the vehicle and the payload, updated payload-vehicle integration drawings, added Science Value, Experimental Logic and Method of Investigation Sections.
Changes made to Activity Plan
There are no significant changes in the activity plan, the project is on schedule.

Madison West Rocket Club SLI 2009 PDR
- 7 -
Vehicle Criteria
Selection, Design, and Verification of Launch Vehicle
Mission Statement, Requirements, and Mission Success Criteria 1. Target Altitude: Rocket must reach altitude of 1 mile — (simulations show
that our rocket will reach 6,800ft using K1275R motor (booster) and J540R (sustainer)). At this stage of the project we are leaving ourselves a sufficient altitude margin to cover for possible rocket design changes and weight increase.
2. Payload: the rocket carries a scientific payload (the rocket itself is a part of
the payload). The payload is not time critical. The payload is reusable.
3. Robustness: Both booster and sustainer must withstand acceleration up to 20g — (we will construct rocket from fiberglass tubing, G10 sheets (for fins) using industrial strength epoxy glue (West Epoxy) with fillers. We will mount the fins using through the wall construction in order to improve robustness).
4. Safe Recovery: Booster and sustainer must land undamaged and suitable
for re-flight. — We will utilize dual deployment scheme for the sustainer with redundant charges and ejection triggers to ensure the ejection and will determine and verify the sizes of parachutes and ejection charges during static tests. Because of the low apogee (1,000ft) the booster will use a simple recovery only (parachute ejected at apogee of first stage flight, after the second stage separation). Ejection charges will be triggered by commercially available e-matches.
5. Propulsion: Rocket must attain a thrust to weight ratio of at least 5.0 at liftoff
and sustainer separation — (simulations show that our entire rocket attains a ratio of 9.5 at liftoff and that our sustainer attains a ratio of 11.5 at second stage ignition). Both motors contain solid ammonium perchlorate based propellant and the total impulse of the vehicle is less than 4,000Ns.
6. Stability: Rocket must have a stability margin of at least 2.0 calibers — (our
entire rocket has a stability margin of 3.0 calibers and our sustainer has a stability margin of 4.5 calibers).
7. Launch: the rocket can launch from a launch tower and it needs a minimum
of 9ft launch guidance to achieve the stable flight velocity.
8. Stage Separation: Sustainer must separate cleanly from booster at second stage separation — (we will employ proper connections between the two stages to ensure separation). We will also use a separation charge that will separate the booster from the sustainer before the second stage ignites.

Madison West Rocket Club SLI 2009 PDR
- 8 -
9. Second Stage Ignition: second stage must ignite on time after the initial stage burns out. We will use two independent timers, each firing an igniter. We will test the timers before the flight and install fresh batteries prior each flight.
10. Preparation: the vehicle will not take more than 4 hours to prepare for the
flight. The payload is built-in into the rocket itself and needs no preparation (with the exception of erasing the memory banks and verifying that the proper firmware is loaded).
11. Data: data will be collected during the flight and analyzed after the vehicle
(including the flight computers) is recovered. 12. Recovery: we are using a standard dual deployment scheme and we expect
that both stages will land relatively close to the launch pad. The sonic and radio beacons will be used to aid us in the vehicle tracking and recovery, should the excessive drift occur.
13. Prohibited items: we are not using flashbulbs, rear ejection, forward firing
motors, AMW-SK motors or forward canards on our vehicle. The vehicle does not exceed Mach 1.
Major Milestones Schedule Project Plan December
08
7th Acquire supplies for scale model 14th Begin work on scale model January
09
11th Finish scale model 18th First test flight of scale model vehicle February
09
1st Begin work on full-scale vehicle and payload
28th Full-scale vehicle completed March 09 1st First test flight of full-scale vehicle 22nd Second test flight of full-scale vehicle April 09 12th Rocket ready for launch 16th Rocket Fair/Hardware & Safety Check 19th SLI Launch Day
Table 1: Major milestones schedule for vehicle construction

Madison West Rocket Club SLI 2009 PDR
- 9 -
Design Review at System Level and Required Subsystems Propulsion System Booster Motor Aerotech K1275N (54mm, Warp9 propellant) will be the primary motor for the booster. It will provide sufficient thrust for the liftoff of the entire vehicle (thrust/weight ratio is 6.27) and will burn out at around 1,000ft after accelerating the rocket to about 200mph. Motor Length
[mm] Diameter [mm]
Thrust [N] Impulse [N]
Burn Time [s]
AT K1275N 569 54 1066 2132 2.00
Table 2: Booster motor parameters
Sustainer Motor After the separation from the booster, the Aerotech J540R motor (54mm, RedLine propellant) will deliver the sustainer to the target altitude. The maximum estimated speed is 550mph and the motor will burn for 2.33s.
Table 3: Sustainer motor parameters
Motor Alternatives Several motor alternatives for each stage were chosen and simulated so our project is not at risk should any of the first choice motors not be available. All alternative motors satisfy the minimum thrust/weight ratio for safe flight. The higher acceleration of some of the alternative choices will not present a difficulty as both our vehicle and the payload are very robust. Booster Possible alternative motor choices (all 54 mm.) are K1075, L1300, or the Aerotech K1050. Motor Apogee [ft] Thrust to Weight Ratio AMW K1075GG 7187 6.17 AMW L1300BB 7627 7.42 AT K1050W 7498 6.47
Table 4: Alternate motors for our booster (the apogee is calculated for flight with J540R in the sustainer)
Motor Length [mm]
Diameter [mm]
Thrust [N]
Impulse [N]
Burn Time [s]
AT J540R 326 54 459 1070 2.33

Madison West Rocket Club SLI 2009 PDR
- 10 -
Sustainer Possible alternative motor choices (all 54 mm.) are the Aerotech J415W, J460T, J800T or the AMW J357WW. Motor Apogee [ft] Thrust to Weight Ratio AT J800T 7430 11.79 AT J415W 7578 7.30 AT J460T 5902 7.79 AMW J357WW 6405 5.78
Table 5: Alternate motors for our sustainer (the apogee is calculated for flight with K1275N in the booster)
The motors will each be contained in a phenolic motor-mount tube, centered in the rocket body with three 0.25” plywood centering rings, and secured with a Lock’N’Load motor retention system. For our scale model test flight we will use an I300T (booster) and a H128W (sustainer), both Aerotech, which will propel our rocket to estimate altitude of just above 4200ft. Structural System The structural system consists of 4” and 6” diameter fiberglass tubing. Two sets of four fins made of G10 fiberglass will be attached with through the wall construction to the motor mounts in either stage. Paper tubing and balsa fins are not acceptable, as they are too weak to withstand high-power rocket flight.
Entire Vehicle
Figure 1: A two dimensional schematic of the entire rocket with center of gravity and center of pressure indicated (the rocket is shown in the liftoff configuration).
Vehicle Parameters
Length [in]
Weight [lbs]
Diameter [in]
Motor Selection
Stability Margin [calibers]
Thrust To Weight Ratio
158 in. 37.45 6 K1275N 2.98 6.27
Table 6: The rocket’s dimensions, stability and propulsion (at liftoff)

Madison West Rocket Club SLI 2009 PDR
- 11 -
Figure 2: A three dimensional schematic of the entire rocket
Letter Part Letter Part A Nosecone H Payload Bay
B Main Parachute
I Payload Electronics
C Sustainer E-Bay
J Drogue Parachute
D Fins K Motor Mount
E Transition
L Main Parachute
F Booster E-Bay
M Payload Electronics
G Fins N Motor Mount
Table 7: Rocket sections and parts
Sustainer
Figure 3: A two dimensional schematic of the sustainer part of the rocket
Sustainer Parameters
Table 8: The dimensions of the sustainer, stability margin and propulsion
Length [in]
Weight [lbs]
Diameter [in]
Motor Selection
Stability Margin
(calibers)
Thrust To
Weight Ratio
94 12.67 4 J540R 4.74 8.88
D E C B A F G
I H L K J M N
Madison West Rocket Club SLI 2009 PDR
- 12 -
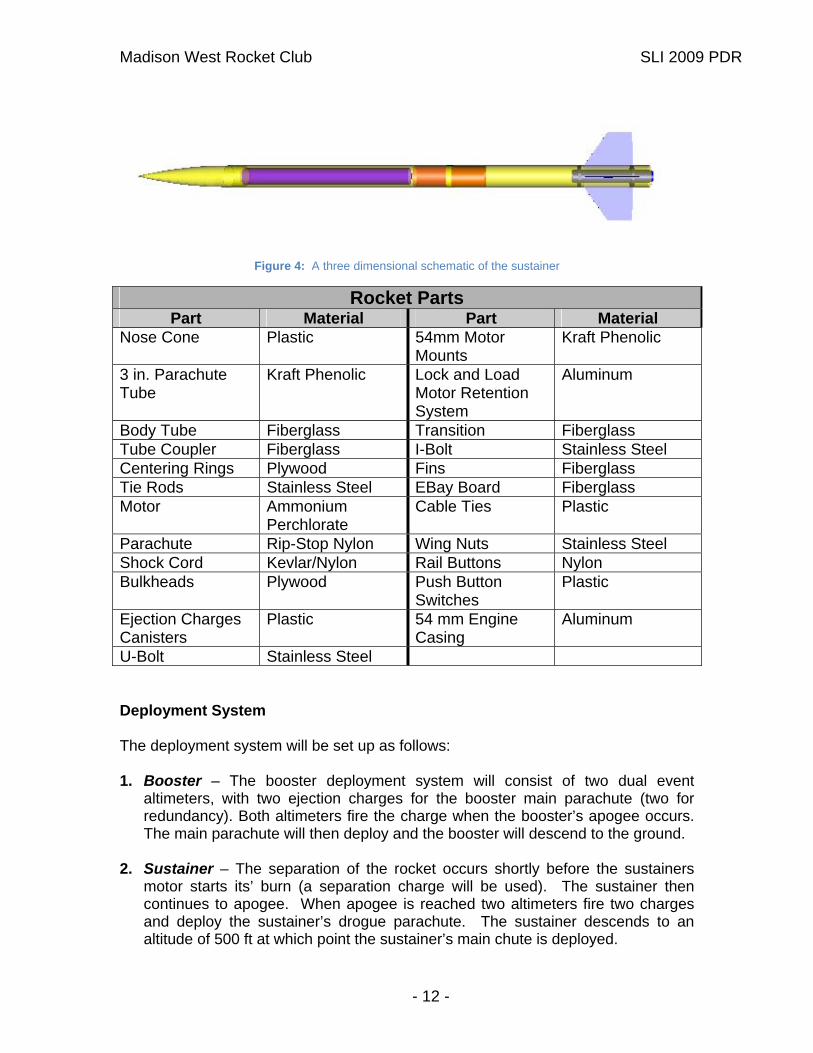
Figure 4: A three dimensional schematic of the sustainer
Rocket Parts Part Material Part Material
Nose Cone Plastic 54mm Motor Mounts
Kraft Phenolic
3 in. Parachute Tube
Kraft Phenolic Lock and Load Motor Retention System
Aluminum
Body Tube Fiberglass Transition Fiberglass Tube Coupler Fiberglass I-Bolt Stainless Steel Centering Rings Plywood Fins Fiberglass Tie Rods Stainless Steel EBay Board Fiberglass Motor Ammonium
Perchlorate Cable Ties Plastic
Parachute Rip-Stop Nylon Wing Nuts Stainless Steel Shock Cord Kevlar/Nylon Rail Buttons Nylon Bulkheads Plywood Push Button
Switches Plastic
Ejection Charges Canisters
Plastic 54 mm Engine Casing
Aluminum
U-Bolt Stainless Steel Deployment System The deployment system will be set up as follows: 1. Booster – The booster deployment system will consist of two dual event
altimeters, with two ejection charges for the booster main parachute (two for redundancy). Both altimeters fire the charge when the booster’s apogee occurs. The main parachute will then deploy and the booster will descend to the ground.
2. Sustainer – The separation of the rocket occurs shortly before the sustainers
motor starts its’ burn (a separation charge will be used). The sustainer then continues to apogee. When apogee is reached two altimeters fire two charges and deploy the sustainer’s drogue parachute. The sustainer descends to an altitude of 500 ft at which point the sustainer’s main chute is deployed.

Madison West Rocket Club SLI 2009 PDR
- 13 -
Figure 5: Flight sequence of the rocket from liftoff to touchdown 1. First stage burn. 2. Stage separation. 3. Booster coasts to its apogee and deploys main parachute. 4. Booster lands safely. 5. Second stage motor burn. 6. Sustainer reaches apogee, deploys drogue parachute 7. Sustainer descends under drogue parachute to 500ft. 8. Main parachute deploys, slowing rocket to safe landing speed of 15-20 fps. 9. Sustainer lands safely.
1
2
3
4
6
7
8
9
5

Madison West Rocket Club SLI 2009 PDR
- 14 -
Performance Characteristics for the System
Verification Plan and Status Verification Tests
V1 Integrity Test: applying force to verify durability. V2 Parachute Drop Test: testing parachute functionality. V3 Tension Test: applying force to the parachute shock cords to test durability V4 Prototype Flight: testing the feasibility of the vehicle with a scale model. V5 Functionality Test: test of basic functionality of a device on the ground V6 Altimeter Ground Test: place the altimeter in a closed container and decrease air pressure to simulate altitude changes. Verify that both the apogee and preset altitude events fire. (Estes igniters or low resistance bulbs can be used for verification). V7 Electronic Deployment Test: test to determine if the electronics can ignite the deployment charges. V8 Ejection Test: test that the deployment charges have the right amount of force to cause parachute deployment and/or planned component separation. V9 Computer Simulation: use RockSim to predict the behavior of the launch vehicle. V10 Integration Test: ensure that the payload fits smoothly and snuggly into the vehicle, and is robust enough to withstand flight stresses.
Tested Components C1: Body (including construction techniques) C2: Altimeter C3: Data Acquisition System (custom computer board and sensors) C4: Parachutes C5: Fins C6: Payload C7: Ejection charges C8: Launch system C9: Motor mount C10: Beacons C11: Shock cords and anchors C12: Rocket stability C13: Second stage separation and ignition electronics/charges

Madison West Rocket Club SLI 2009 PDR
- 15 -
Matrix Legend P: Planned Tests F: Finished Tests V 1 V 2 V 3 V 4 V 5 V 6 V 7 V 8 V 9 V 10 C 1 P P P P C 2 P P P C 3 P P C 4 P P P P P C 5 P P C 6 P P P C 7 P P P P C 8 P P C 9 P P C 10 P P P C 11 P P P C 12 P P C 13 P P P P
Table 9: Verification matrix for the vehicle

Madison West Rocket Club SLI 2009 PDR
- 16 -
Risks and Mitigations Physical Risks Risks Consequences Mitigation Saws, knives, Dremel tools, band saws
Laceration All members will follow safety procedures and use protective devices to minimize risk
Sandpaper, fiberglass
Abrasion All members will follow safety procedures and use protective devices to minimize risk
Drill press Puncture wound All members will follow safety procedures and use protective devices to minimize risk
Soldering iron Burns All members will follow safety procedures to minimize risk
Computer, printer
Electric shock All members will follow safety procedures to minimize risk
Workshop risks Personal injury, material damage
All work in the workshop will be supervised by one or more adults. The working area will be well lit and strict discipline will be required
Table 10: Risks that would cause physical harm to an individual
Toxicity Risks Risks Consequences Mitigation Epoxy, enamel paints and primer, superglue
Toxic fumes Area will be well ventilated and there will be minimal use of possibly toxic-fume emitting substances
Superglue, epoxy, enamel paints, primer
Toxic substance consumption
All members will follow safety procedures to minimize risk emergency procedure will be followed in case of accidental digestion
Table 11: Risks that would cause toxic harm to an individual
Rocket/Payload Risks Risks Consequences Mitigation Unstable rocket Errant flight Rocket stability will be verified by computer
and scale model flight Improper motor mounting
Damage or destruction of rocket.
Engine system will be integrated into the rocket under proper supervision and used in the accordance with the manufactures’ recommendations.
Weak rocket structure
Rocket structural failure
Rocket will be constructed with durable products to minimize risk

Madison West Rocket Club SLI 2009 PDR
- 17 -
Propellant malfunction
Engine explosion All members will follow NAR Safety Code for High Powered Rocketry, especially the safe distance requirement. Attention of all launch participants will be required.
Parachute Parachute failure Parachute Packaging will be double checked by team members. Deployment of parachutes will be verified during static testing.
Payload Payload failure/malfunction
Team members will double-check all possible failure points on payload.
Launch rail failure
Errant flight NAR Safety code will be observed to protect all member and spectators
Separation failure
Parachutes fail to deploy
Separation joints will be properly lubricated and inspected before launch. All other joints will be fastened securely.
Ejection falsely triggered
Unexpected/premature ignition/personal injury/property damage
Proper arming and disarming procedures will be followed. External switches will control all rocket electronics.
Recovery failure
Rocket is lost The rocket will be equipped with radio and sonic tracking beacons
Transportation damage
Possible aberrations in launch, flight and recovery.
Rocket will be properly packaged for transportation and inspected carefully prior to launch
Table 12: Risks associated with the rocket launch
Specific Two Stage Vehicle Risks Risks Consequences Mitigation Stages fail to separate
Stage 2motor burns while still attached to booster
Make sure coupler fit is exact, and use a previously tested method for use in two-stage rockets of this size
Second stage motor fails to ignite
No second stage separation, rocket too heavy for safe descent rate
Recommended staging igniters will be used and the staging electronics will thoroughly tested before each flight. Recovery of all stages is triggered by altimeters and all recovery devices will deploy even if the second stage fails to ignite.
Second stage motor fires late
Horizontal second stage flight
Our members will check that the timer is accurately set, a reliable igniter will be used, and we will supply new batteries for each flight
Motor failure Second stage We will use reliable motors and

Madison West Rocket Club SLI 2009 PDR
- 18 -
(chaff or CATO)
mistakenly detects launch and ignites
electronics. The timers require 2g+ acceleration for 0.5s before they trigger the timer countdown.
Obstacles on the rocket cause an unstable flight
Unsteady flight The barriers opposite each other will be the identical to create equal drag on each side and we will be using larger fins than usual. We will also have a scale model flight and wind tunnel testing to ensure safe flight
Table 13: Risks associated with a two stage rocket launch

Madison West Rocket Club SLI 2009 PDR
- 19 -
Manufacturing, Verification, Integration, and Operation Plans
Confidence and Maturity of Design Our rocket has been designed with the principles of high-power rocketry in mind. We used a strong material, fiberglass for the body, we are using G10 fiberglass for the fins, we are using a through the wall fin mount for extra strength, and we are using a dual deployment scheme for the booster to make recovery easier. We have also taken into account the fact that larger rockets can acceptably handle stability margins significantly over 2.5. The rocket performance and stability has been predicted by RockSim simulations and will also be verified by a half scale model flight. The complete ignition, separation and deployment scheme will be verified during the scale model flight.
Recovery Subsystem
Our rocket will deploy a total of three parachutes. One parachute is housed in the booster. This will be deployed as the booster main parachute after the booster has reached its apogee (approximately 1000ft AGL). The other two parachutes are housed in the sustainer. The sustainer drogue chute will be deployed at sustainer’s apogee, slowing and stabilizing the rockets descent. The sustainer’s main chute will be deployed at 500ft, slowing the rocket to a safe descent rate.
Component WeightParachute Diameter
Descent Rate
Booster (Main) 24 lb. 72'' 21 ft/sec Sustainer(Drogue) 12.5 lb. 24" 47 ft/sec Sustainer(Main) 12.5 lb. 60" 19 ft/sec
Table 14: Parachute dimensions for individual components
Mission Performance Predictions
The graph below shows the simulated flight profile for K1275/J540 motor combination. A significant increase in slope is visible shortly after the first stage burnout (2.00s) and the sustainer reaches the apogee of 7,000ft twenty seconds after the ignition. At this stage of the project we consider 7,000ft “close enough” to one mile target altitude, especially considering that RockSim tends to overestimate apogees and the rocket tends to “gain weight” as the project progresses.

Madison West Rocket Club SLI 2009 PDR
- 20 -
Figure 6: Altitude vs. time graph for K1275/J540 motor combination. The rocket reaches 7000ft at 20s after ignition.
Wind Speed vs. Altitude The effect of the wind speed on the apogee of the entire flight is investigated in the table below. Even under the worst possible conditions (wind speeds 20mph, the NAR limit) the flight apogee will differ by less than 4% from the apogee reached in windless conditions.
Table 15: Flight apogee vs. wind speed
Wind Speed [mph] Altitude [ft] Percent Change in Altitude
0 6993 0.00%5 6971 0.31%
10 6914 1.13%15 6830 2.33%20 6730 3.76%

Madison West Rocket Club SLI 2009 PDR
- 21 -
Thrust Profile The graph below shows the thrust profile for K1275/J540 motor combination. The two distinct burns are clearly visible. The K1275 motor has a 1,500N initial spike which will provide a sufficient speedup of the whole vehicle as it leaves the launch rail.
Figure 7: Thrust vs. time graph. The rocket has a maximum thrust of just over 1500 N.
From the velocity profile below we can read that the first stage will accelerate to 200mph+ before the thrust tapers off, at which point a momentary deceleration can occur. The second stage will then take over, accelerating the sustainer to 550mph+ and delivering to the flight apogee.

Madison West Rocket Club SLI 2009 PDR
- 22 -
Figure 8: Velocity vs. time graph. The booster motor burns out just over 2s and the sustainer motor burns out at slightly under 4.5 seconds.
Acceleration Profile The graph below depicts the estimated acceleration profile. Two separate peaks correspond to the two burns. Our rocket will be robust enough to endure the 15g+ acceleration shocks.
Figure 9: Acceleration vs. time graph. The rocket has a maximum acceleration of 9.5g for the booster and a maximum of just over 11.0g for the sustainer’s burn.

Madison West Rocket Club SLI 2009 PDR
- 23 -
Vehicle requirements and objectives
Refer to Mission Statement, Requirements and Mission Success Criteria.
Payload Integration
The payload will be very closely integrated in the rocket. We have designed our rocket so that none of the rocket subsystems will not interfere with the data collection. The pressure sensors will be mounted on the inside wall of the airframe with a small sampling hole to allow data collection to occur and separated from the ejection paths inside the rocket by an inner tube. Our rocket design enables easy access to the payload. The payload integration is discussed in detail in the Payload section.
Launch Operation Procedures
Launch System Our rocket will require the usage of a 12 ft. launch tower coupled with a blast deflector. To ignite the motor we will use a standard 12 volt ignition system with a commercially available igniter.
Final Assembly and Launch Procedures
1. Install payload into the rocket 2. Assemble rocket partway 3. Fold parachutes properly with Nomex protection 4. Attach shock cords to parachutes and to rocket 5. Connect and place charges into rocket; check for continuity 6. Insert parachutes into rocket 7. Install and secure the motor in the sustainer, including the staging igniter. 8. Fully assemble the rocket and check structural integrity 9. Insert booster motor into the booster motor mount and secure with motor
retention system 10. Place rocket onto launch tower and make sure the rocket slides smoothly 11. Place igniter into the rocket and place engine cap over the end to secure it
in place 12. Attach the igniter to the launch system and check for continuity 13. Activate electronics, wait for boot and confirm continuity 14. Move 500 feet away from the rocket (minimum safe launch distance of K-
class vehicles) 15. Check sky for aircraft 16. Arm ignition system 17. Countdown 18. Launch rocket

Madison West Rocket Club SLI 2009 PDR
- 24 -
Disarming Procedure (only if motor doesn’t ignite)
1. Remove ignition interlock to prevent accidental ignition 2. Wait designated time by HPR safety code (1 minute) 3. Disarm electronics and remove rocket from pad 4. Replace igniter 5. Place rocket back on pad, re-arm electronics 6. Test continuity
Safety and Environment
Safety Officer The safety officer for our team is Zoë.
Risks and Mitigations of Personnel Hazards Risks, consequence and mitigations are listed in the Risks and Mitigations section earlier in this document.
Environmental Concerns With any activity such as rocketry, one can cause damage to the environment. Fumes emitted from the engine of the rocket during the launch can possibly cause air pollution, rockets that aren’t recovered could cause physical harm to animals, and any non-biodegradable material will remain for years. To try to minimize the potential environ-mental hazards associated with rocketry, we will strictly comply with all state and federal environmental regulations. We will keep track of everything we use to launch our rockets and the rockets themselves to ensure that all parts are recovered. We will use Nomex parachute protection to avoid littering the launch area with flame retardant wadding.

Madison West Rocket Club SLI 2009 PDR
- 25 -
Payload Criteria
Selection, Design, and Verification of Payload Experiment
Payload System The payload will measure the airflow around the rocket using an array of pressure and temperature sensors. Data will be collected both in a wind tunnel and during an actual rocket flight. The data from both set-ups will then be contrasted to determine whether the wind tunnel testing has given us an accurate prediction of airflow characteristics. The sustainer will have four small obstacles with 12 sensors surrounding them and the booster will have 16 sensors surrounding the transition and the fins.
Figure 10: A drawing of the rocket that includes the location of the pressure/temperature sensors in red and obstacles simulating protrusions such as fuel lines or electronic boxes in blue.
Payload Subsystems: Data Acquisition System: The pressure and temperature sensor array will allow us to measure temperature and pressure 100 times per second at 12 locations on the sustainer and 16 locations on the booster.
o Each sensor package will consist of one pressure sensor, one temperature sensor, and one multi-channel analog digital converter (ADC). By putting the ADC at the sensor package and transferring the measured signals digitized we eliminate electronic noise, which would otherwise render our data inaccurate.
o The sensor packages will be connected to the Data Processing and Storage System (DPSS) by 5 lines: ADC SDA and SCLK (synchronous serial connection), and CS (chip select), and +5V Supply and 0V Ground.
o We will use a serial connector with one DSUB-70 connector and a ribbon cable to connect the sensors to the DPSS. We will split the ribbon into 12 (sustainer) / 16 (booster) parts for each individual sensor package.

Madison West Rocket Club SLI 2009 PDR
- 26 -
Figure 11: This diagram demonstrates the connections between the various electronic systems monitoring the experiment. The "Shepherd" Propeller microcomputer drives the two "Sheep" Propeller microcomputers which collect data from sensor modules located throughout the rocket. Additionally the Shepherd Propeller collects data from the three accelerometers and a pressure sensor.
Data Processing and Storage System: The main electronics will activate the sensors to commence data collection, receive measured data, and save data in nonvolatile memory.
o The Data Processing will be done by linked Parallax Propeller Chips (part number P8X32A). Each Propeller chip has 8 independent cores, each core running at 80MHz.
o We will have one shepherd chip and multiple sheep chips: The shepherd will coordinate data gathering, sending a signal every
hundredth of a second to instruct the sheeps to gather the data. Each sheep will have 7 sensor packages, one for each core with one
core being dedicated to communication with the shepherd. The sheep will only know how to gather data from the sensors, and
when the command is given, they will retrieve the data and send it to the shepherd.
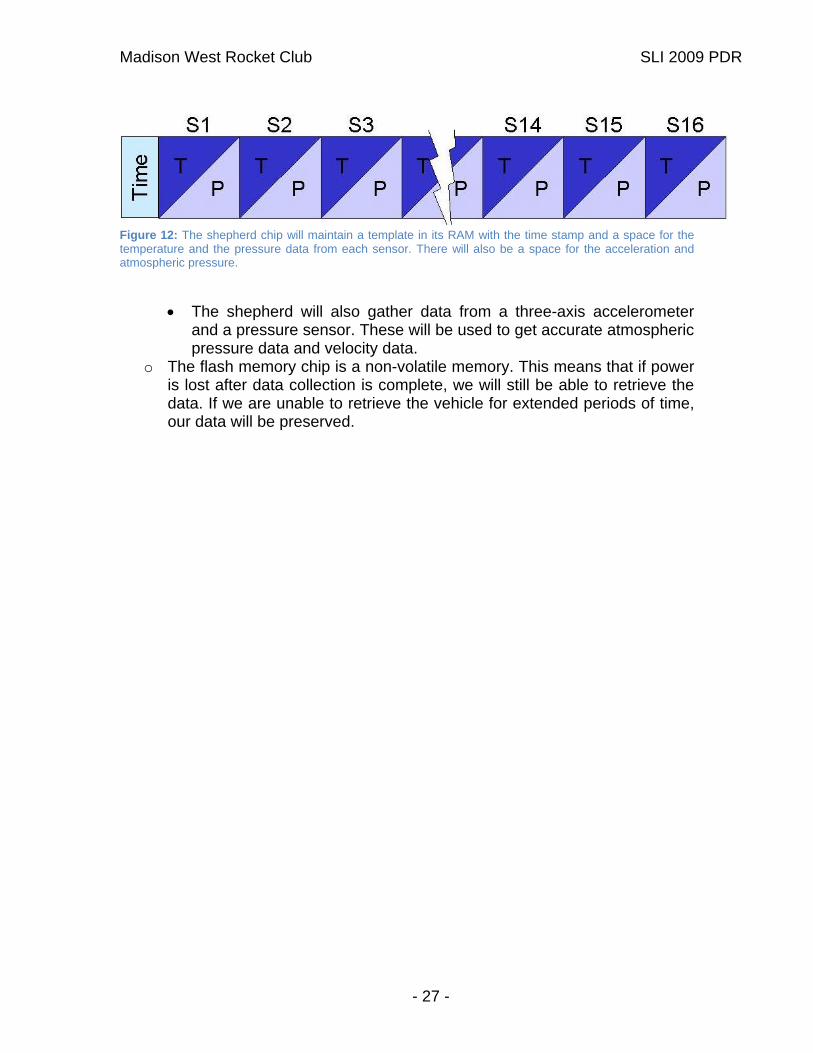
Once the shepherd has sent the command to gather data, the sheeps will respond with data and the shepherd will store data in an array, as depicted on the figure below. Once all elements of the array are filled with the most current data, the shepherd will save data in the non-volatile flash memory.
Madison West Rocket Club SLI 2009 PDR
- 27 -
Figure 12: The shepherd chip will maintain a template in its RAM with the time stamp and a space for the temperature and the pressure data from each sensor. There will also be a space for the acceleration and atmospheric pressure.
The shepherd will also gather data from a three-axis accelerometer
and a pressure sensor. These will be used to get accurate atmospheric pressure data and velocity data.
o The flash memory chip is a non-volatile memory. This means that if power is lost after data collection is complete, we will still be able to retrieve the data. If we are unable to retrieve the vehicle for extended periods of time, our data will be preserved.

Madison West Rocket Club SLI 2009 PDR
- 28 -
Simulated External Components: Obstacles based on common shapes in rocketry will create variations in air flow that will be measured by our sensors. We will attach them firmly because it is necessary that the obstacles will not come loose during flight. We will be measuring the disturbances in air flow by using temperature and pressure sensors in various locations, as shown in the picture below, around the fins and obstacles both in a wind tunnel and in the actual flight. The data collected will be compared to identify any significant differences in air flow between the wind tunnel tests and the actual flight.
Figure 13: The pressure/temperature sensors (2) are located on either side of the obstacle (1), one on the fore end and two on the aft end.
The picture below shows different shapes of obstacles that we are considering for our experiment. Other shapes/sizes can be considered as well.
Figure 14: Different obstacles as shown in the figure above can be placed onto the rocket.
2 2 2
1

Madison West Rocket Club SLI 2009 PDR
- 29 -
Performance Characteristics and Verification Matrix The components and tests for the verification matrix are listed below. Verification Test
1. Drop Test: Drop components to ensure that they will not break in flight or during landing. Drop height will be chosen so that it simulates a rocket landing.
2. Connection and Basic Functionality Test: Ensure that all electronic components, devices and batteries are connected firmly and will not loosen in flight. When possible verify that powered up component functions correctly.
3. Pressure Sensor Test: Place pressure sensors in a calibrated pressure chamber to verify that they record changes in pressure accurately.
4. Scale Model Flight: When possible, include component in scale model flight to verify that the component can function during flight.
5. Temperature Sensor Test: Place temperature sensors in a known temperature setting to verify that the temperature sensors register the temperature changes correctly.
6. Durability Test: Verify that the obstacles will not detach during flight. 7. Acceleration Test: Verify that the accelerometer is functioning properly. 8. Battery Capacity Test: Verify that our batteries will supply enough power
for our electronics to function for a sufficient time duration (at least one hour).
Components to be verified
1. Pressure Sensors 2. Battery Pack 3. Altimeter 4. 3D Accelerometer 5. Obstacles 6. Temperature Sensors
Tests P=PLANNED
F=FINISHED 1 2 3 4 5 6 7 8 1 P P P 2 P P P 3 P P P P P 4 P P P P 5 P P P
Co
mp
on
ents
6 P P P P P
Figure 15: Verification matrix for the payload

Madison West Rocket Club SLI 2009 PDR
- 30 -
Verification Plan and Status As shown in the verification matrix, all tests have yet to be conducted, but are planned. The successful completion of all tests will determine the payload flight readiness.
Preliminary Integration Plan The Integration of our payload into our rocket requires careful design because we are taking data at many points around the rocket and the sensors must not interfere with the deployment and recovery subsystems. The example of integration unit is shown on the figure below. An inner tube is used to separate the sensors from the parachutes and shockcords and also to provide a clear ejection path. The sensors are located between the inner and outer tube and the parachute and shockcord are stored in the inner tube. The main printed circuit boards are in the e-bays, isolated by bulkheads from the rest of the rocket.
Figure 16: Diagram showing position of pressure/temperature sensors in the payload. The sensors and the wiring are isolated from the parachutes and shockcords (the parachute is stored in the inner tube and the sensors are between the inner and outer tube).
Entire Rocket The figure below shows the compartmentalization of the entire rocket.
Figure 17: Diagram of the rocket showing (1) Sustainer main parachute (2) Sustainer electronics bay (3) Sustainer drogue parachute compartment (4) Booster parachute compartment (5) Booster Electronics bay
1 2 3 4 5

Madison West Rocket Club SLI 2009 PDR
- 31 -
Sustainer
Figure 18: Diagram of the sustainer showing (1) Nosecone with modified 3” shoulder (2) Sustainer main parachute compartment (3) Sustainer electronics bay containing Data Processing and Storage System (4) Sustainer drogue storage (5) Motor mount with conduit for the stage separation charge and igniter
We will fasten a 3”coupler tube to the inside of a 4” nosecone with centering rings so that it will fit into the double walled main parachute section visible at the fore end of the rocket. In between the two walls will be the sensor packages in the sustainer. We will run the data lines through this space via small conduits. The Data Processing and Storage System will be located centrally in the sustainer. The fore bulkhead of the electronics bay will have a protruding nub to firmly seat the base of the 3” inner tube to ensure that no ejection gases escape into the inter-tube space. Aft of the electronics bay is the drogue parachute storage. No sensors will be located aft of this, however we will run two double-stranded wires through this section from the electronics bay to a stage separation charge and also to the igniter in the sustainer motor. We will use a conduit to carry the wires through the motor mount centering rings. Static ejection testing will verify that the wires do not interfere with the successful deployment of the main parachute. Booster
Figure 19: Diagram of the Booster showing (1) Interstage coupler (2) Booster parachute storage (3) Booster electronics bay (4) Motor mount
1 2 3 4 5
1 2 3 4

Madison West Rocket Club SLI 2009 PDR
- 32 -
At the top of the booster there will be a 4” coupler tube with a 1” ring of 4” tube around it to connect the booster and the sustainer. A bulkhead mounted in the interstage will protect the booster main parachute from the separation charge and the ignition of the second stage motor. A length of shock cord will attach the interstage to the recovery harness for the main parachute. A double walled tube for storage of the booster’s main parachute will allow us to place sensors and run wires to the front of the transition. A circular nub on the fore bulkhead of the electronics bay will seat the base of the inner tube. The electronics bay will be a 4” section of coupler tube with bulkheads on either end without the traditional ring on the outside. The booster will be made of one continuous 48” section of 6” fiberglass tubing. The electronics bay will be fastened in place by machine screws into wood taps located in the bulkheads. The centering rings for the inner parachute tube will be epoxied to the inner tube and attached to the outer tube by machine screws into wood taps. The transition will also be removable to provide easy access to the sensor packages placed behind it. Some sensor packages will be placed around the rear fins of the booster, and conduits through the centering rings will hold the data lines. The data lines to the sensors in and around the motor mount will be long enough for us to completely remove the electronics bay from the booster without disconnecting the lines.
Precision of Instrumentation, Repeatability of Measurement and Recovery System Our Data Processing and Storage will contain enough memory to record for several minutes, enough for one flight, and then the data will be downloaded to a computer via the programming port. We will then be able to record a new flight in the same chip as we will have a permanent copy on the computer. Commercially available sensors will be used for the collection of atmospheric data. We will also verify and calibrate these sensors as described in the verification matrix. The exact precision of instrumentation will be determined after our preliminary experiments are completed and make a final decision of which sensors will go into the payload. A varied array of sensors will be placed in the rocket and then they will be tested in a wind tunnel multiple times to determine which is the best fit for the range of pressures and temperatures observed. These results will be reported in the CDR at which time the final selection will be made.

Madison West Rocket Club SLI 2009 PDR
- 33 -
Payload Concept Features and Definition
Creativity and Originality While researching the feasibility of an experiment on turbulence, we had the original idea of observing pigment released out of the nosecone from inside a transparent rocket. However, we determined this experiment to be unfeasible considering the quantity of necessary pigment, the difficulty in observing the pigment due to limitations in camera focal length, as well as the quick transition into turbulent airflow. However, we find the topic of airflow around the flying interesting and after more discussion we have arrived at the idea of using an array of sensors to observe the airflow characteristics. We also raise the question of whether the wind tunnel results are a valid prediction for an actual rocket flight. Rapid changes in the speed of the rocket along with the influences of cross winds cannot be duplicated in a wind tunnel. Furthermore, because many rockets have protrusions which affect the aerodynamics of the rocket (e.g. fuel lines or boxes for electronics), it is worthwhile to observe the effect of such protrusions on the air flow around the rocket. This led to the inclusion of obstacles on the body of the rocket. Additionally, to collect a wider range of data from a single flight, we decided to add a second stage to the rocket, which has a different diameter and speed from the first stage.
Uniqueness and Significance Our creative payload involves a complex array of sensors used to collect data which can be used to determine the character of airflow around the rocket. We will then compare this data to the data collected in a wind tunnel. Because wind tunnels cannot accurately simulate all characteristics of a rocket flight (such as rapid speed changes or crosswinds), it will be interesting to see the difference between the data collected during rocket flight and the data obtained from the experiments in the wind tunnel.
Suitable Level of Challenge In order to obtain an accurate pressure profile, data must be collected and stored 100 times per second. To achieve this high data rate we will utilize both powerful hardware (a multicore 32bit microprocessor with 80MHz clock) and efficient software (the speed critical functions will be written in assembly language to maximize the execution speeds). We have already located pressure sensors with response time of 1ms, however we are still researching our options for temperature measurements (this is not a critical point though, as the pressure is the most important quantity to measure). In addition to the inherent complexities of a two stage vehicle, the payload and the rocket are closely connected due to the design of the experiment. A careful

Madison West Rocket Club SLI 2009 PDR
- 34 -
integration must occur to ensure that the payload and rocket do not interfere with each other. The location of sensors and ejection paths have to be carefully negotiated. In the wind tunnel, we will not have the option of using the G-switches or accelerometer readings to activate the data collection and further, the wind tunnel turbines need some time to come up to the desired speed. A different data collection trigger will be needed for the wind tunnel experiment. The preliminary solution is to monitor the sensors and only activate the data storage routines when the desired air speed is detected (air speed can be computed from the pressure differences on the sensors).
Science Value
Science Payload Objectives Commercial rockets often have protrusions on the body, such as fuel lines, that may interrupt the air flow around the rocket. During the flight the rocket experiences a wide range of rapidly changing velocities and possibly strong crosswind gusts that can significantly change the character of the airflow around the vehicle. Such conditions are not easily (if at all) simulated in a wind tunnel. Commercial rockets are often tested in a wind tunnel before flight to determine their stability and flight performance. However, due to limitations in achievable air speed and air speed changes, wind tunnels can accurately simulate an actual rocket flight only to some extent. Our rocket is equipped with an array of pressure and temperature sensors and thus provides an opportunity to test the effects of such protrusions during the actual rocket flight. Additionally, the same sensor array can record the data during a wind tunnel experiment and help us to determine the accuracy of wind tunnel testing.
Payload Success Criteria Obstacles remain attached to the rocket during flight. Sensors will successfully collect and store measureable data during flight. Data collected is reliable and accurate.

Madison West Rocket Club SLI 2009 PDR
- 35 -
Experimental Logic, Approach, and Method of Investigation, Variables, Controls and Correlations Independent Variables
Type and location of obstacles………………. L Air density outside of rocket……..…………….D Speed of air flow………………………………. S Humidity……………………………………...… H Air pressure……………………………………. P Air temperature………………………………… T Acceleration profile……………………….. X,Y,Z
Dependent Variables
Pressure at each sensor………….………….. Yx Temperature at each sensor…...................….Tx
Controls
Identical rocket in wind tunnel and actual flight Identical obstacles on rocket in wind tunnel and actual flight Identical wind speeds in wind tunnel and actual flight of first stage Identical sensors and method of data storage
Correlations
Our primary correlations will be Yx=f(L) (local pressure vs. location) and Yx=f(S) (local pressure vs. airspeed) for both the wind tunnel test and the actual flight, which will be compared to determine the accuracy of wind tunnel testing.
Further correlations in the actual flight include the relationships between temperature and selected independent variables and the relationships between pressure and selected independent variables.
We expect that detailed analysis of the aforementioned correlations will provide us with a better understanding of the effects of protrusions on the rocket and the accuracy of wind tunnel testing. In addition to the data measured by the sensors, we will be able to use visible tracers (e. g. smoke) in the wind tunnel to gain more insight into the airflow changes around the rocket. The rocket will be sent to an altitude of 1 mile with a second stage launched 2 seconds after the take off. Various sensors will collect pressure and temperature data on the air flow around obstacles placed on the rocket throughout the ascent of the flight. After the flight, we will analyze the data collected.

Madison West Rocket Club SLI 2009 PDR
- 36 -
For a comparison the flight condition will be simulated as much as possible in the wind tunnel and the payload will record a comparable set of data. Both data sets will compared.
Test and Measurement Test and Measurement The rocket will ascend to an altitude of one mile. After around two seconds into the flight, the second stage will launch. Throughout the flight, pressure and temperature sensors positioned near the obstacles, second stage booster, and fins will be collecting data. We will then analyze the data and compare to data collected in a wind tunnel.
Test Measurement Temperature Temperature will be collected 20 times per second by
the sensor array Pressure Pressure will be collected at least 100 times per
second by the sensor array
Relevance of Expected Data, Accuracy and Error Analysis The correlations from this experiment will aid both in the understanding of differences between wind tunnel tests and rocket flight as well as the effect of protrusions on the rocket body on the air flow around the rocket. The differences between wind tunnel tests and the actual flight will demonstrate the accuracy and limitations in wind tunnel testing. The correlations between air flow and the locations of obstacles will provide further information on the effects of different protrusions on the air flow around the rocket that could potentially affect certain aspects of the rocket flight. The payload will be carefully calibrated in pressure chambers and controlled temperature environment. Further verification of the payload functionality will be obtained from experiments in the wind tunnel where the conditions can be set and monitored by independent set of devices.
Preliminary Experiment Process Procedures We will be subjecting our temperature and pressure sensors to preliminary tests to ensure their accuracy. We will ensure that all of the sensors will be calibrated. The rocket itself will be tested in a wind tunnel at the University of Wisconsin Engineering Department.

Madison West Rocket Club SLI 2009 PDR
- 37 -
Safety and Environment
Safety Officer The safety officer for the payload team will be Zoë.
Risks and Mitigations of Payload As our vehicle and payload are very tightly integrated, the risks for the entire project are listed in the Vehicle Criteria – Risks and Mitigations section.
Environmental Concerns Please refer to the Vehicle Criteria – Environmental Concerns section. Because of the tight integrations of the vehicle and the payload there are no payload specific environmental concerns.

Madison West Rocket Club SLI 2009 PDR
- 38 -
Activity Plan
Budget
Budget Vehicle Tubing $400 Fin Material $50 PerfectFlite MAWD Altimeter (x4)* $0 PerfectFlite miniTimer3 (x2)* $0 Parachutes, recovery gear* $0 Waltson Tracking System* $0 Miscellaneous supplies (tools, glues) $50 Scale Model Tubing $50 Fin Material $10 Motors Scale Model Motors $50 K1000 $160 J540 (x2) $180 Payload Sensors $300 Custom Data Acquisition System
(DAS) $200
Total: $1450 * Already in possession Trip Budget Flight $400/person x 10 people $4000 Rooms $120/ night and room x 5 rooms x 4
nights $2,400
Ground Support
$400 rental + $300 gas $700 Total: $7,100
NASA Support $7,100 – $1,200.00 $5,900 Member Cost $5,900 / 9 members $656 per member
Table 16: Project and travel budget
Our club already owns a large selection of tools and parts that have been left over from our past projects. We plan to utilize all parts and tools that we already have in our possession to lower the total cost of rocket and payload construction. The money saved will be used to buy additional motors in order to allow us to perform more flights and collect more data.

Madison West Rocket Club SLI 2009 PDR
- 39 -
We also conduct fundraising in the fall to raise money for TARC and to cover any budget overruns in our SLI projects. This will cover the difference between the cost of our project and the grant provided by NASA. We can also use this money to defray the costs of our travel.
Timeline
Project Plan December
08
5th PDR (Preliminary Design Review) due 7th Acquire supplies for scale model 14th Begin work on scale model 15th Begin work on CDR 20th-4th Winter Break January
09
11th Finish scale model 18th First test flight of scale model vehicle 22nd Critical Design Review Presentation
Slides and CDR Report Due 28th-
Feb. 6th Critical Design Review Presentations (tentative)
February 09
1st Begin work on full-scale vehicle and payload
8th Begin work on FRR 28th Full-scale vehicle completed March 09 1st First test flight of full-scale vehicle 18th Flight Readiness Review Presentation
Slides and FRR report due 25th-
Apr. 3rd Flight Readiness Review Presentations (tentative)
23rd Payload construction completed. April 09 12th Rocket ready for launch 15th Travel to Huntsville 16th Rocket Fair/Hardware & Safety Check 18th USLI Launch Day 19th SLI Launch Day 20th Travel Home May 09 22nd Post Launch Assessment Review (PLAR)
Table 17: Project schedule

Madison West Rocket Club SLI 2009 PDR
- 40 -
Outreach Summary
This year we have already held one major outreach activity, in which girls scouts of varying ages from all across southern Wisconsin built small Viper rockets with our club members help. Our club gained considerable visibility in the community and greatly enjoyed working with the scouts. Besides this event, we also recruited new members for our club at Madison West High School. They will participate in TARC, along with a few returning members from our SLI teams. TARC club meetings have already started for this school year, with interested new members learning about the basics of rocket building and practicing new knowledge during rocket construction sessions on weekends. We also sent a press release to our sponsors and supporters regarding our selection for the 2009 SLI program, reprinted below. Madison West Rocket Club Awarded Two NASA SLI Grants Madison West High School Rocket Club has been awarded two NASA Student Launch Initiative grants for the 2008-2009 school year. Two teams (17 students total) will enjoy the opportunity to work on NASA supervised sounding rocket research projects and launch their final flights at NASA’s Marshall Space Flight Center, Huntsville, AL, during the week of April 15th, 2009. The target altitude for each flight is one mile (5,280 ft). The senior team (veterans of 2007-2008 season) has successfully proposed a study of an airflow around the rocket both during an actual rocket flight and a simulated flight in a wind tunnel. A two stage vehicle equipped with an array of pressure and temperature sensors will be used for the study. The actual grant proposal is available online as
http://westrocketry.com/sli2009/SOW_Airflow_MadisonWest2009.pdf The team wishes to acknowledge invaluable input and support received from Professor Riccardo Bonazza the from the UW Dept of Engineering Physics. The junior team enters the SLI scene with a study of bacterial concentrations both below and above the planetary boundary layer (PBL). The current location of the PBL will be determined by real-time analysis of local atmospheric data measured during the rocket ascent, the bacteria will be collected on the descent. Please visit
http://westrocketry.com/sli2009/SOW_Bacterias_MadisonWest2009.pdf to read the entire grant proposal. Dr. Shanteri Singh from UW Department of Pharmaceutical Research and Professor Edwin Eloranta from UW Department of Atmospheric Sciences provided crucial input during the experiment development. At this opportunity, Madison West Rocket Club would also like to recognize its facility providers, namely UW Space Place (workshop space), DNASTAR, Inc. (research and conference environment) and Reddan Soccer Park (local launch site).

Madison West Rocket Club SLI 2009 PDR
- 41 -
Conclusion The project is on schedule and progresses as expected. The details of the vehicle design are now well defined and we will start the construction of a half scale model on the weekend of December 6, 2008. A high level design of the payload is now finished and we are already researching electronic components and sensors that will be used during our experiment. The integration issues have been also resolved and there are no conflicts between the needs of the payload and the deployment/recovery subsystem.