
Machine Learning Department School of Computer Science...
63
Backpropagation + Deep Learning 1 10-601 Introduction to Machine Learning Matt Gormley Lecture 13 Mar 1, 2018 Machine Learning Department School of Computer Science Carnegie Mellon University
Transcript of Machine Learning Department School of Computer Science...

Backpropagation+
Deep Learning
1
10-601 Introduction to Machine Learning
Matt GormleyLecture 13
Mar 1, 2018
Machine Learning DepartmentSchool of Computer ScienceCarnegie Mellon University
Reminders
• Homework 5: Neural Networks– Out: Tue, Feb 28– Due: Fri, Mar 9 at 11:59pm
2
Q&A
3
BACKPROPAGATION
4

A Recipe for Machine Learning
1. Given training data: 3. Define goal:
5
Background
2. Choose each of these:– Decision function
– Loss function
4. Train with SGD:(take small steps opposite the gradient)

Approaches to Differentiation
• Question 1:When can we compute the gradients of the parameters of an arbitrary neural network?
• Question 2:When can we make the gradient computation efficient?
6
Training

Approaches to Differentiation
1. Finite Difference Method– Pro: Great for testing implementations of backpropagation– Con: Slow for high dimensional inputs / outputs– Required: Ability to call the function f(x) on any input x
2. Symbolic Differentiation– Note: The method you learned in high-school– Note: Used by Mathematica / Wolfram Alpha / Maple– Pro: Yields easily interpretable derivatives– Con: Leads to exponential computation time if not carefully implemented– Required: Mathematical expression that defines f(x)
3. Automatic Differentiation - Reverse Mode– Note: Called Backpropagation when applied to Neural Nets– Pro: Computes partial derivatives of one output f(x)i with respect to all inputs xj in time proportional
to computation of f(x)– Con: Slow for high dimensional outputs (e.g. vector-valued functions)– Required: Algorithm for computing f(x)
4. Automatic Differentiation - Forward Mode– Note: Easy to implement. Uses dual numbers.– Pro: Computes partial derivatives of all outputs f(x)i with respect to one input xj in time proportional
to computation of f(x)– Con: Slow for high dimensional inputs (e.g. vector-valued x)– Required: Algorithm for computing f(x)
7
Training
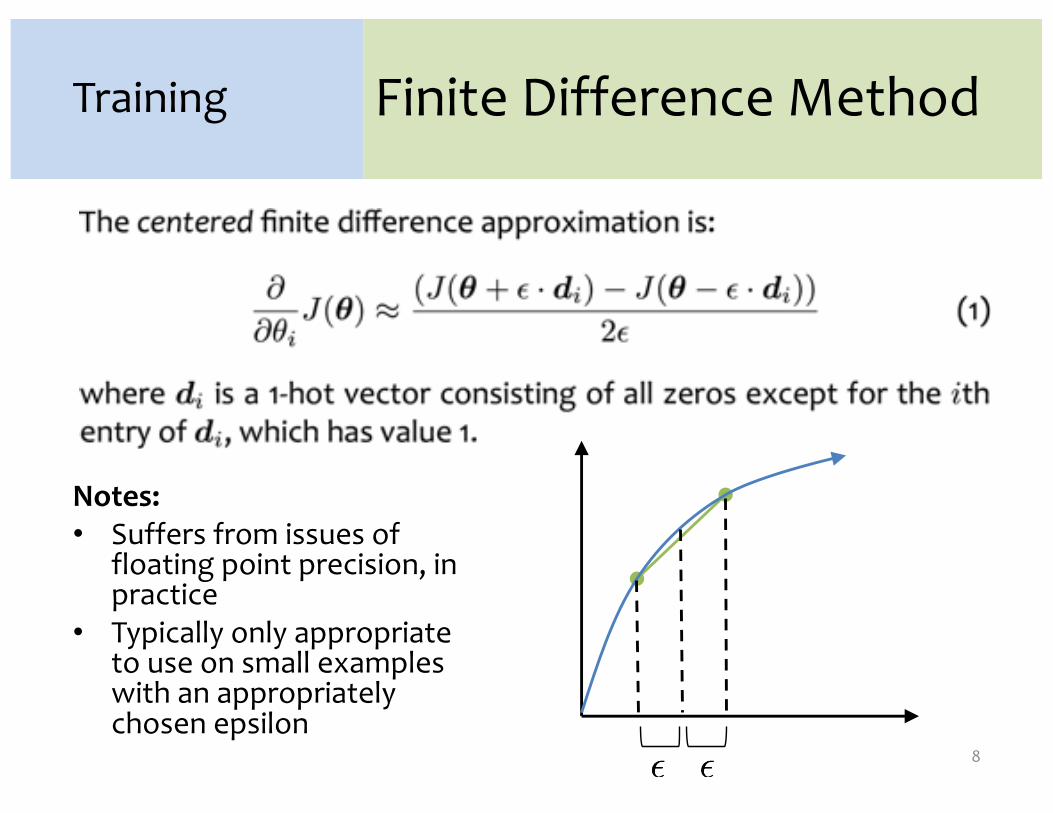
Finite Difference Method
Notes:• Suffers from issues of
floating point precision, in practice
• Typically only appropriate to use on small examples with an appropriately chosen epsilon
8
Training

Symbolic Differentiation
9
Training
Differentiation Quiz #1:Suppose x = 2 and z = 3, what are dy/dx and dy/dz for the function below?
Symbolic Differentiation
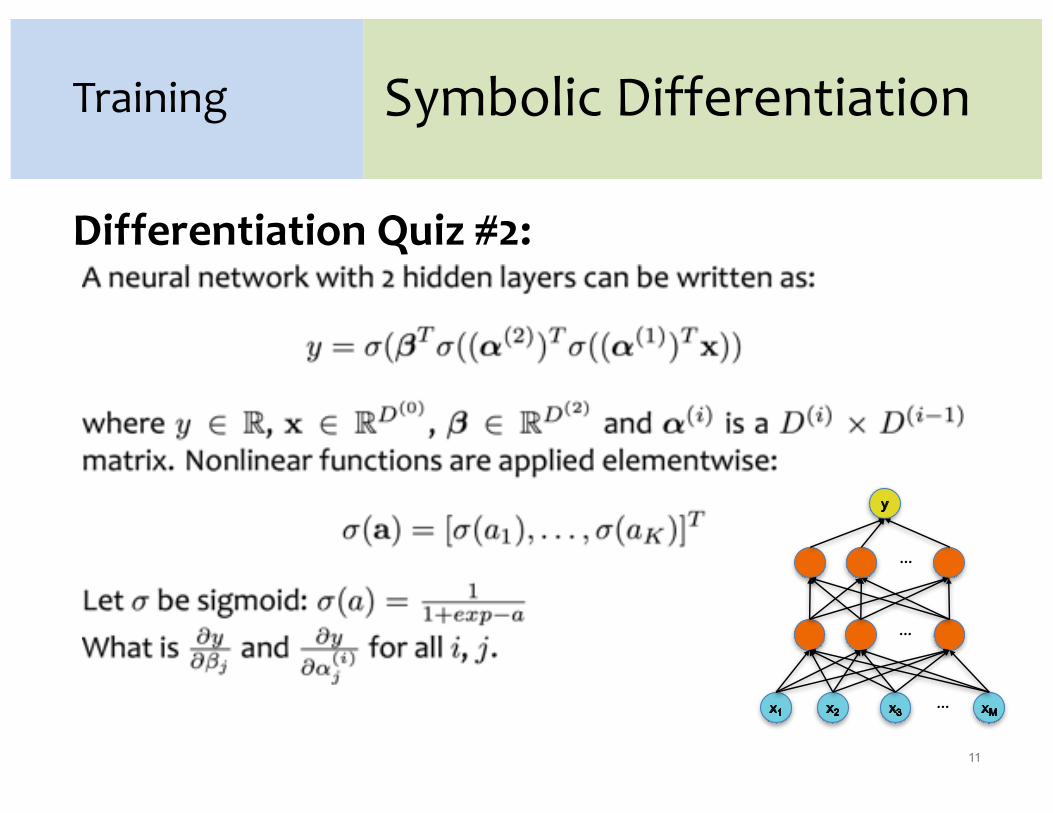
Differentiation Quiz #2:
11
Training
…
…
…

Chain Rule
Whiteboard– Chain Rule of Calculus
12
Training

Chain Rule
13
Training
2.2. NEURAL NETWORKS AND BACKPROPAGATION
x to J , but also a manner of carrying out that computation in terms of the intermediatequantities a, z, b, y. Which intermediate quantities to use is a design decision. In thisway, the arithmetic circuit diagram of Figure 2.1 is differentiated from the standard neuralnetwork diagram in two ways. A standard diagram for a neural network does not show thischoice of intermediate quantities nor the form of the computations.
The topologies presented in this section are very simple. However, we will later (Chap-ter 5) how an entire algorithm can define an arithmetic circuit.
2.2.2 BackpropagationThe backpropagation algorithm (Rumelhart et al., 1986) is a general method for computingthe gradient of a neural network. Here we generalize the concept of a neural network toinclude any arithmetic circuit. Applying the backpropagation algorithm on these circuitsamounts to repeated application of the chain rule. This general algorithm goes under manyother names: automatic differentiation (AD) in the reverse mode (Griewank and Corliss,1991), analytic differentiation, module-based AD, autodiff, etc. Below we define a forwardpass, which computes the output bottom-up, and a backward pass, which computes thederivatives of all intermediate quantities top-down.
Chain Rule At the core of the backpropagation algorithm is the chain rule. The chainrule allows us to differentiate a function f defined as the composition of two functions gand h such that f = (g �h). If the inputs and outputs of g and h are vector-valued variablesthen f is as well: h : RK
! RJ and g : RJ! RI
) f : RK! RI . Given an input
vector x = {x1
, x2
, . . . , xK}, we compute the output y = {y1
, y2
, . . . , yI}, in terms of anintermediate vector u = {u
1
, u2
, . . . , uJ}. That is, the computation y = f(x) = g(h(x))can be described in a feed-forward manner: y = g(u) and u = h(x). Then the chain rulemust sum over all the intermediate quantities.
dyi
dxk=
JX
j=1
dyi
duj
duj
dxk, 8i, k (2.3)
If the inputs and outputs of f , g, and h are all scalars, then we obtain the familiar formof the chain rule:
dy
dx=
dy
du
du
dx(2.4)
Binary Logistic Regression Binary logistic regression can be interpreted as a arithmeticcircuit. To compute the derivative of some loss function (below we use regression) withrespect to the model parameters ✓, we can repeatedly apply the chain rule (i.e. backprop-agation). Note that the output q below is the probability that the output label takes on thevalue 1. y⇤ is the true output label. The forward pass computes the following:
J = y⇤log q + (1 � y⇤
) log(1 � q) (2.5)
where q = P✓
(Yi = 1|x) =
1
1 + exp(�
PDj=0
✓jxj)(2.6)
13
2.2. NEURAL NETWORKS AND BACKPROPAGATION
x to J , but also a manner of carrying out that computation in terms of the intermediatequantities a, z, b, y. Which intermediate quantities to use is a design decision. In thisway, the arithmetic circuit diagram of Figure 2.1 is differentiated from the standard neuralnetwork diagram in two ways. A standard diagram for a neural network does not show thischoice of intermediate quantities nor the form of the computations.
The topologies presented in this section are very simple. However, we will later (Chap-ter 5) how an entire algorithm can define an arithmetic circuit.
2.2.2 BackpropagationThe backpropagation algorithm (Rumelhart et al., 1986) is a general method for computingthe gradient of a neural network. Here we generalize the concept of a neural network toinclude any arithmetic circuit. Applying the backpropagation algorithm on these circuitsamounts to repeated application of the chain rule. This general algorithm goes under manyother names: automatic differentiation (AD) in the reverse mode (Griewank and Corliss,1991), analytic differentiation, module-based AD, autodiff, etc. Below we define a forwardpass, which computes the output bottom-up, and a backward pass, which computes thederivatives of all intermediate quantities top-down.
Chain Rule At the core of the backpropagation algorithm is the chain rule. The chainrule allows us to differentiate a function f defined as the composition of two functions gand h such that f = (g �h). If the inputs and outputs of g and h are vector-valued variablesthen f is as well: h : RK
! RJ and g : RJ! RI
) f : RK! RI . Given an input
vector x = {x1
, x2
, . . . , xK}, we compute the output y = {y1
, y2
, . . . , yI}, in terms of anintermediate vector u = {u
1
, u2
, . . . , uJ}. That is, the computation y = f(x) = g(h(x))can be described in a feed-forward manner: y = g(u) and u = h(x). Then the chain rulemust sum over all the intermediate quantities.
dyi
dxk=
JX
j=1
dyi
duj
duj
dxk, 8i, k (2.3)
If the inputs and outputs of f , g, and h are all scalars, then we obtain the familiar formof the chain rule:
dy
dx=
dy
du
du
dx(2.4)
Binary Logistic Regression Binary logistic regression can be interpreted as a arithmeticcircuit. To compute the derivative of some loss function (below we use regression) withrespect to the model parameters ✓, we can repeatedly apply the chain rule (i.e. backprop-agation). Note that the output q below is the probability that the output label takes on thevalue 1. y⇤ is the true output label. The forward pass computes the following:
J = y⇤log q + (1 � y⇤
) log(1 � q) (2.5)
where q = P✓
(Yi = 1|x) =
1
1 + exp(�
PDj=0
✓jxj)(2.6)
13
Chain Rule:Given:
…

Chain Rule
14
Training
2.2. NEURAL NETWORKS AND BACKPROPAGATION
x to J , but also a manner of carrying out that computation in terms of the intermediatequantities a, z, b, y. Which intermediate quantities to use is a design decision. In thisway, the arithmetic circuit diagram of Figure 2.1 is differentiated from the standard neuralnetwork diagram in two ways. A standard diagram for a neural network does not show thischoice of intermediate quantities nor the form of the computations.
The topologies presented in this section are very simple. However, we will later (Chap-ter 5) how an entire algorithm can define an arithmetic circuit.
2.2.2 BackpropagationThe backpropagation algorithm (Rumelhart et al., 1986) is a general method for computingthe gradient of a neural network. Here we generalize the concept of a neural network toinclude any arithmetic circuit. Applying the backpropagation algorithm on these circuitsamounts to repeated application of the chain rule. This general algorithm goes under manyother names: automatic differentiation (AD) in the reverse mode (Griewank and Corliss,1991), analytic differentiation, module-based AD, autodiff, etc. Below we define a forwardpass, which computes the output bottom-up, and a backward pass, which computes thederivatives of all intermediate quantities top-down.
Chain Rule At the core of the backpropagation algorithm is the chain rule. The chainrule allows us to differentiate a function f defined as the composition of two functions gand h such that f = (g �h). If the inputs and outputs of g and h are vector-valued variablesthen f is as well: h : RK
! RJ and g : RJ! RI
) f : RK! RI . Given an input
vector x = {x1
, x2
, . . . , xK}, we compute the output y = {y1
, y2
, . . . , yI}, in terms of anintermediate vector u = {u
1
, u2
, . . . , uJ}. That is, the computation y = f(x) = g(h(x))can be described in a feed-forward manner: y = g(u) and u = h(x). Then the chain rulemust sum over all the intermediate quantities.
dyi
dxk=
JX
j=1
dyi
duj
duj
dxk, 8i, k (2.3)
If the inputs and outputs of f , g, and h are all scalars, then we obtain the familiar formof the chain rule:
dy
dx=
dy
du
du
dx(2.4)
Binary Logistic Regression Binary logistic regression can be interpreted as a arithmeticcircuit. To compute the derivative of some loss function (below we use regression) withrespect to the model parameters ✓, we can repeatedly apply the chain rule (i.e. backprop-agation). Note that the output q below is the probability that the output label takes on thevalue 1. y⇤ is the true output label. The forward pass computes the following:
J = y⇤log q + (1 � y⇤
) log(1 � q) (2.5)
where q = P✓
(Yi = 1|x) =
1
1 + exp(�
PDj=0
✓jxj)(2.6)
13
2.2. NEURAL NETWORKS AND BACKPROPAGATION
x to J , but also a manner of carrying out that computation in terms of the intermediatequantities a, z, b, y. Which intermediate quantities to use is a design decision. In thisway, the arithmetic circuit diagram of Figure 2.1 is differentiated from the standard neuralnetwork diagram in two ways. A standard diagram for a neural network does not show thischoice of intermediate quantities nor the form of the computations.
The topologies presented in this section are very simple. However, we will later (Chap-ter 5) how an entire algorithm can define an arithmetic circuit.
2.2.2 BackpropagationThe backpropagation algorithm (Rumelhart et al., 1986) is a general method for computingthe gradient of a neural network. Here we generalize the concept of a neural network toinclude any arithmetic circuit. Applying the backpropagation algorithm on these circuitsamounts to repeated application of the chain rule. This general algorithm goes under manyother names: automatic differentiation (AD) in the reverse mode (Griewank and Corliss,1991), analytic differentiation, module-based AD, autodiff, etc. Below we define a forwardpass, which computes the output bottom-up, and a backward pass, which computes thederivatives of all intermediate quantities top-down.
Chain Rule At the core of the backpropagation algorithm is the chain rule. The chainrule allows us to differentiate a function f defined as the composition of two functions gand h such that f = (g �h). If the inputs and outputs of g and h are vector-valued variablesthen f is as well: h : RK
! RJ and g : RJ! RI
) f : RK! RI . Given an input
vector x = {x1
, x2
, . . . , xK}, we compute the output y = {y1
, y2
, . . . , yI}, in terms of anintermediate vector u = {u
1
, u2
, . . . , uJ}. That is, the computation y = f(x) = g(h(x))can be described in a feed-forward manner: y = g(u) and u = h(x). Then the chain rulemust sum over all the intermediate quantities.
dyi
dxk=
JX
j=1
dyi
duj
duj
dxk, 8i, k (2.3)
If the inputs and outputs of f , g, and h are all scalars, then we obtain the familiar formof the chain rule:
dy
dx=
dy
du
du
dx(2.4)
Binary Logistic Regression Binary logistic regression can be interpreted as a arithmeticcircuit. To compute the derivative of some loss function (below we use regression) withrespect to the model parameters ✓, we can repeatedly apply the chain rule (i.e. backprop-agation). Note that the output q below is the probability that the output label takes on thevalue 1. y⇤ is the true output label. The forward pass computes the following:
J = y⇤log q + (1 � y⇤
) log(1 � q) (2.5)
where q = P✓
(Yi = 1|x) =
1
1 + exp(�
PDj=0
✓jxj)(2.6)
13
Chain Rule:Given:
…Backpropagationis just repeated application of the chain rule from Calculus 101.
Backpropagation
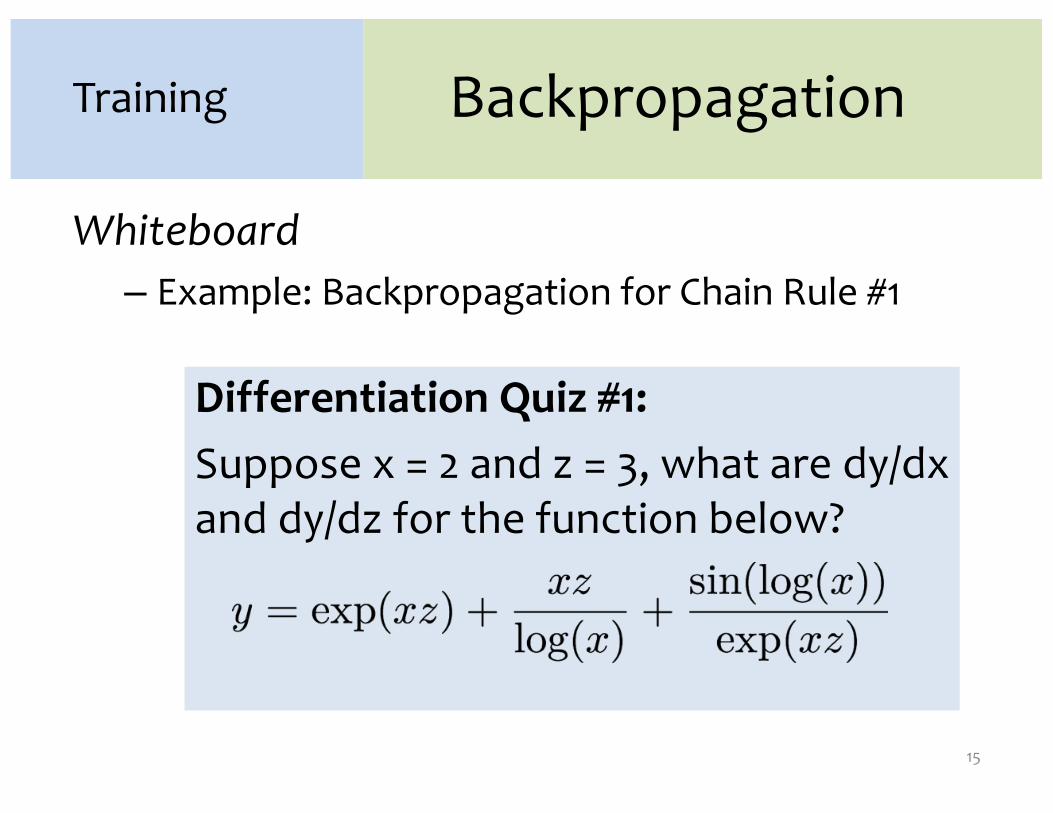
Whiteboard– Example: Backpropagation for Chain Rule #1
15
Training
Differentiation Quiz #1:Suppose x = 2 and z = 3, what are dy/dx and dy/dz for the function below?

Backpropagation
16
Training
Automatic Differentiation – Reverse Mode (aka. Backpropagation)
Forward Computation1. Write an algorithm for evaluating the function y = f(x). The
algorithm defines a directed acyclic graph, where each variable is a node (i.e. the “computation graph”)
2. Visit each node in topological order. For variable ui with inputs v1,…, vNa. Compute ui = gi(v1,…, vN)b. Store the result at the node
Backward Computation1. Initialize all partial derivatives dy/duj to 0 and dy/dy = 1.2. Visit each node in reverse topological order.
For variable ui = gi(v1,…, vN)a. We already know dy/duib. Increment dy/dvj by (dy/dui)(dui/dvj)
(Choice of algorithm ensures computing (dui/dvj) is easy)
Return partial derivatives dy/dui for all variables
Backpropagation
17
Training
Forward Backward
J = cos(u)dJ
du= �sin(u)
u = u1 + u2dJ
du1=
dJ
du
du
du1,
du
du1= 1
dJ
du2=
dJ
du
du
du2,
du
du2= 1
u1 = sin(t)dJ
dt=
dJ
du1
du1
dt,
du1
dt= (t)
u2 = 3tdJ
dt=
dJ
du2
du2
dt,
du2
dt= 3
t = x2 dJ
dx=
dJ
dt
dt
dx,
dt
dx= 2x
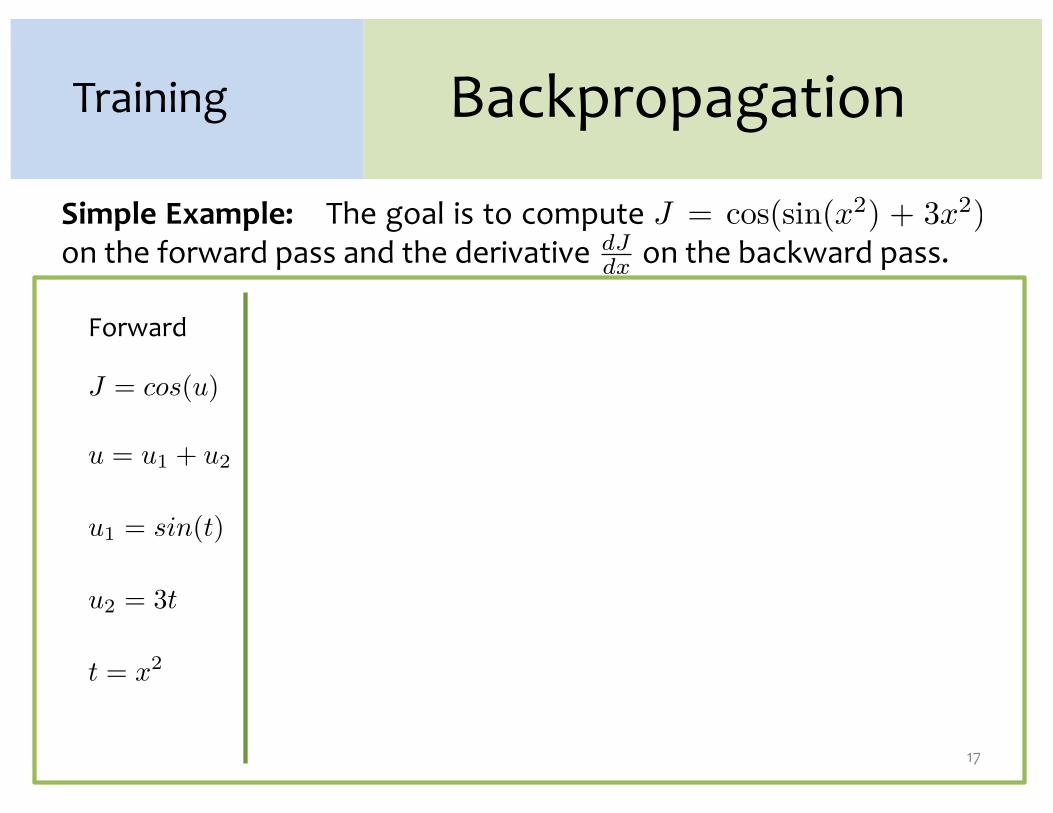
Simple Example: The goal is to compute J = ( (x2) + 3x2)on the forward pass and the derivative dJ
dx on the backward pass.

Backpropagation
18
Training
Forward Backward
J = cos(u)dJ
du= �sin(u)
u = u1 + u2dJ
du1=
dJ
du
du
du1,
du
du1= 1
dJ
du2=
dJ
du
du
du2,
du
du2= 1
u1 = sin(t)dJ
dt=
dJ
du1
du1
dt,
du1
dt= (t)
u2 = 3tdJ
dt=
dJ
du2
du2
dt,
du2
dt= 3
t = x2 dJ
dx=
dJ
dt
dt
dx,
dt
dx= 2x
Simple Example: The goal is to compute J = ( (x2) + 3x2)on the forward pass and the derivative dJ
dx on the backward pass.

Backpropagation
19
Training
…
Output
Input
θ1 θ2 θ3 θM
Case 1:Logistic Regression
Forward Backward
J = y� y + (1 � y�) (1 � y)dJ
dy=
y�
y+
(1 � y�)
y � 1
y =1
1 + (�a)
dJ
da=
dJ
dy
dy
da,
dy
da=
(�a)
( (�a) + 1)2
a =D�
j=0
�jxjdJ
d�j=
dJ
da
da
d�j,
da
d�j= xj
dJ
dxj=
dJ
da
da
dxj,
da
dxj= �j
Backpropagation
20
Training
…
…
Output
Input
Hidden Layer
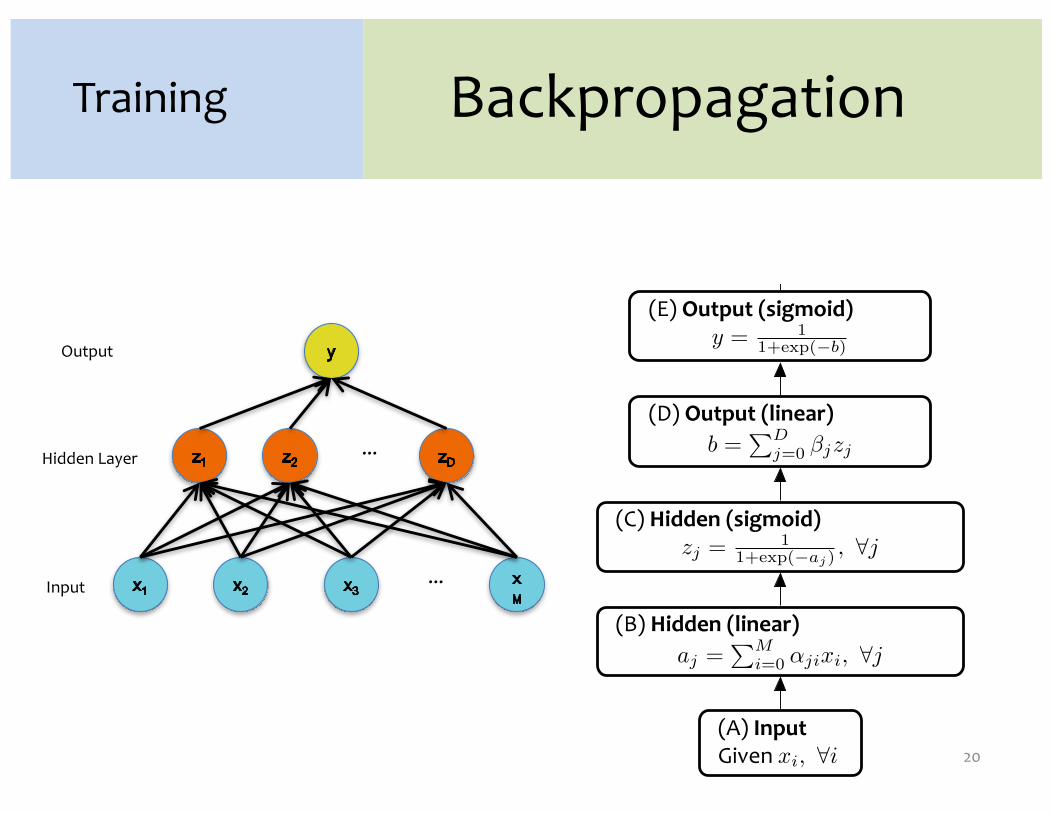
(F) LossJ = 1
2 (y � y(d))2
(E) Output (sigmoid)y = 1
1+ (�b)
(D) Output (linear)b =
�Dj=0 �jzj
(C) Hidden (sigmoid)zj = 1
1+ (�aj), �j
(B) Hidden (linear)aj =
�Mi=0 �jixi, �j
(A) InputGiven xi, �i

Backpropagation
21
Training
…
…
Output
Input
Hidden Layer
(F) LossJ = 1
2 (y � y�)2
(E) Output (sigmoid)y = 1
1+ (�b)
(D) Output (linear)b =
�Dj=0 �jzj
(C) Hidden (sigmoid)zj = 1
1+ (�aj), �j
(B) Hidden (linear)aj =
�Mi=0 �jixi, �j
(A) InputGiven xi, �i
Backpropagation
22
Training
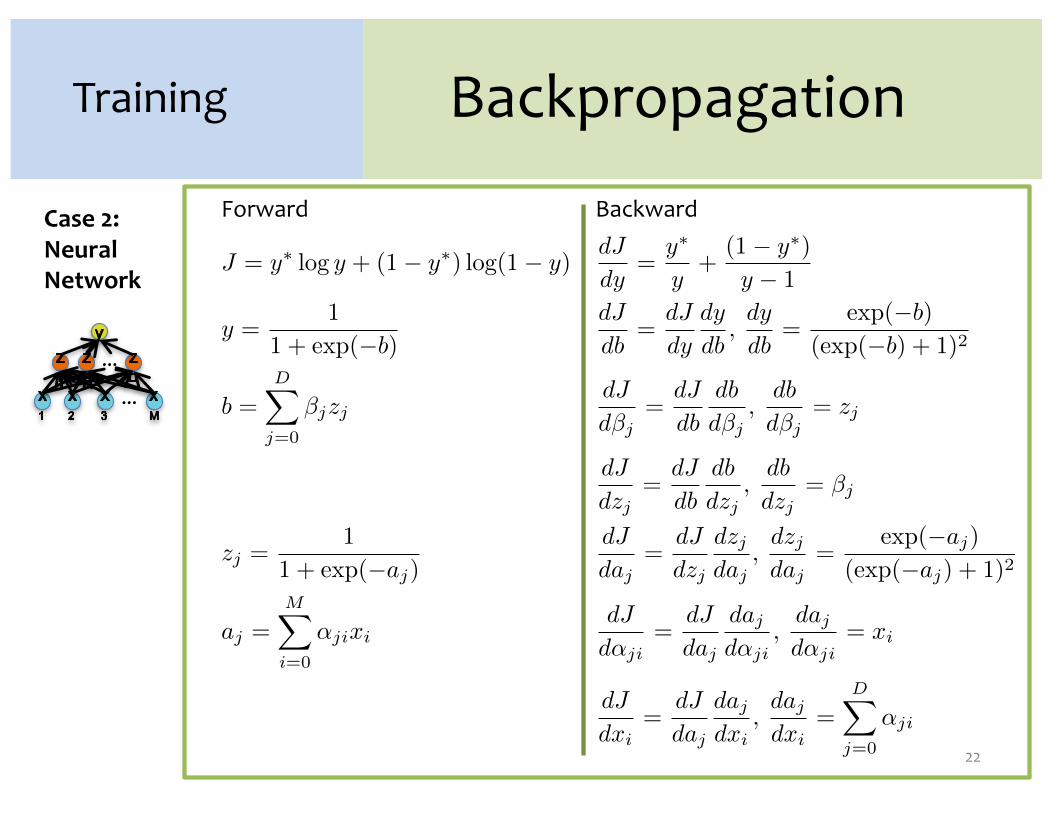
Case 2:Neural Network
…
…
Forward Backward
J = y� y + (1 � y�) (1 � y)dJ
dy=
y�
y+
(1 � y�)
y � 1
y =1
1 + (�b)
dJ
db=
dJ
dy
dy
db,
dy
db=
(�b)
( (�b) + 1)2
b =D�
j=0
�jzjdJ
d�j=
dJ
db
db
d�j,
db
d�j= zj
dJ
dzj=
dJ
db
db
dzj,
db
dzj= �j
zj =1
1 + (�aj)
dJ
daj=
dJ
dzj
dzj
daj,
dzj
daj=
(�aj)
( (�aj) + 1)2
aj =M�
i=0
�jixidJ
d�ji=
dJ
daj
daj
d�ji,
daj
d�ji= xi
dJ
dxi=
dJ
daj
daj
dxi,
daj
dxi=
D�
j=0
�ji
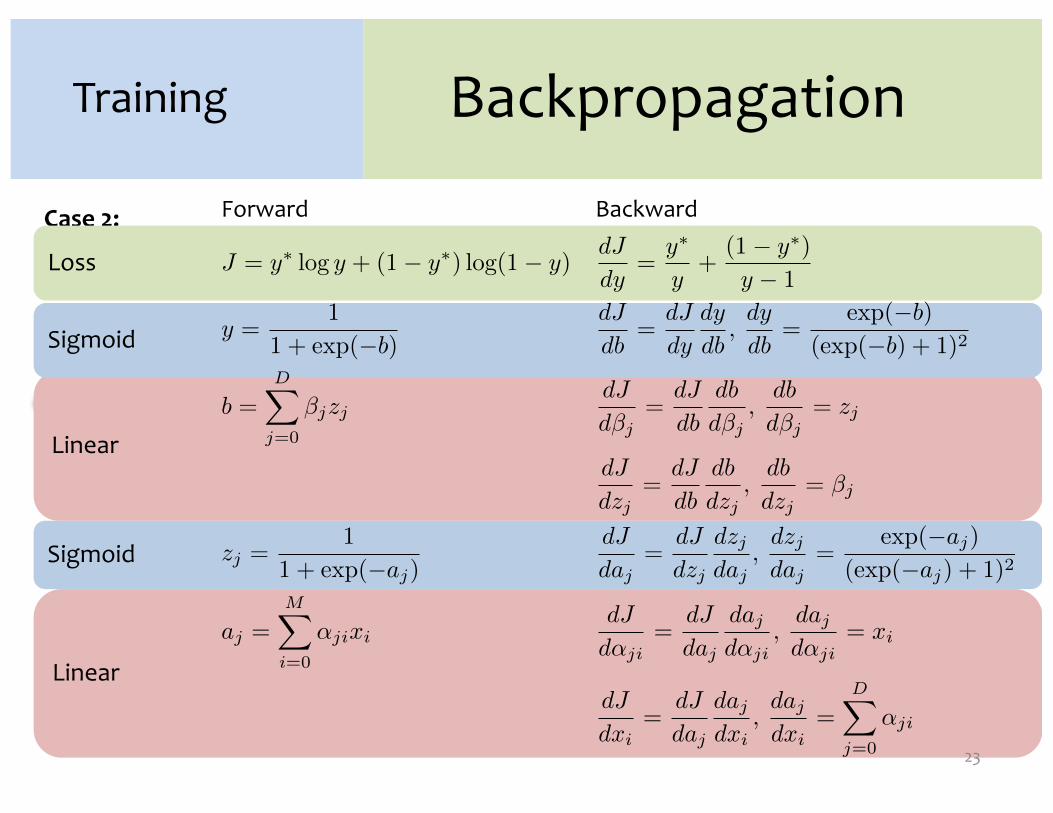
Case 2:Neural Network
…
…
Linear
Sigmoid
Linear
Sigmoid
Loss
Backpropagation
23
Training
Forward Backward
J = y� y + (1 � y�) (1 � y)dJ
dy=
y�
y+
(1 � y�)
y � 1
y =1
1 + (�b)
dJ
db=
dJ
dy
dy
db,
dy
db=
(�b)
( (�b) + 1)2
b =D�
j=0
�jzjdJ
d�j=
dJ
db
db
d�j,
db
d�j= zj
dJ
dzj=
dJ
db
db
dzj,
db
dzj= �j
zj =1
1 + (�aj)
dJ
daj=
dJ
dzj
dzj
daj,
dzj
daj=
(�aj)
( (�aj) + 1)2
aj =M�
i=0
�jixidJ
d�ji=
dJ
daj
daj
d�ji,
daj
d�ji= xi
dJ
dxi=
dJ
daj
daj
dxi,
daj
dxi=
D�
j=0
�ji
Backpropagation
Whiteboard– SGD for Neural Network– Example: Backpropagation for Neural Network
24
Training

Backpropagation
25
Training
Backpropagation (Auto.Diff. - Reverse Mode)
Forward Computation1. Write an algorithm for evaluating the function y = f(x). The
algorithm defines a directed acyclic graph, where each variable is a node (i.e. the “computation graph”)
2. Visit each node in topological order. a. Compute the corresponding variable’s valueb. Store the result at the node
Backward Computation1. Initialize all partial derivatives dy/duj to 0 and dy/dy = 1.2. Visit each node in reverse topological order.
For variable ui = gi(v1,…, vN)a. We already know dy/duib. Increment dy/dvj by (dy/dui)(dui/dvj)
(Choice of algorithm ensures computing (dui/dvj) is easy)
Return partial derivatives dy/dui for all variables

A Recipe for Machine Learning
1. Given training data: 3. Define goal:
26
Background
2. Choose each of these:– Decision function
– Loss function
4. Train with SGD:(take small steps opposite the gradient)
Gradients
Backpropagation can compute this gradient! And it’s a special case of a more general algorithm called reverse-mode automatic differentiation that can compute the gradient of any differentiable function efficiently!

Summary
1. Neural Networks…– provide a way of learning features– are highly nonlinear prediction functions– (can be) a highly parallel network of logistic
regression classifiers– discover useful hidden representations of the
input2. Backpropagation…– provides an efficient way to compute gradients– is a special case of reverse-mode automatic
differentiation27

DEEP NETS
28

A Recipe for Machine Learning
1. Given training data: 3. Define goal:
29
Background
2. Choose each of these:– Decision function
– Loss function
4. Train with SGD:(take small steps opposite the gradient)
Goals for Today’s Lecture
1. Explore a new class of decision functions (Deep Neural Networks)
2. Consider variants of this recipe for training

Idea #1: No pre-training
30
Training
� Idea #1: (Just like a shallow network)� Compute the supervised gradient by backpropagation.� Take small steps in the direction of the gradient (SGD)

Comparison on MNIST
1.0
1.5
2.0
2.5
Shallow Net Idea #1(Deep Net, no-
pretraining)
Idea #2(Deep Net,
supervised pre-training)
Idea #3(Deep Net,
unsupervised pre-training)
% Er
ror
31
Training
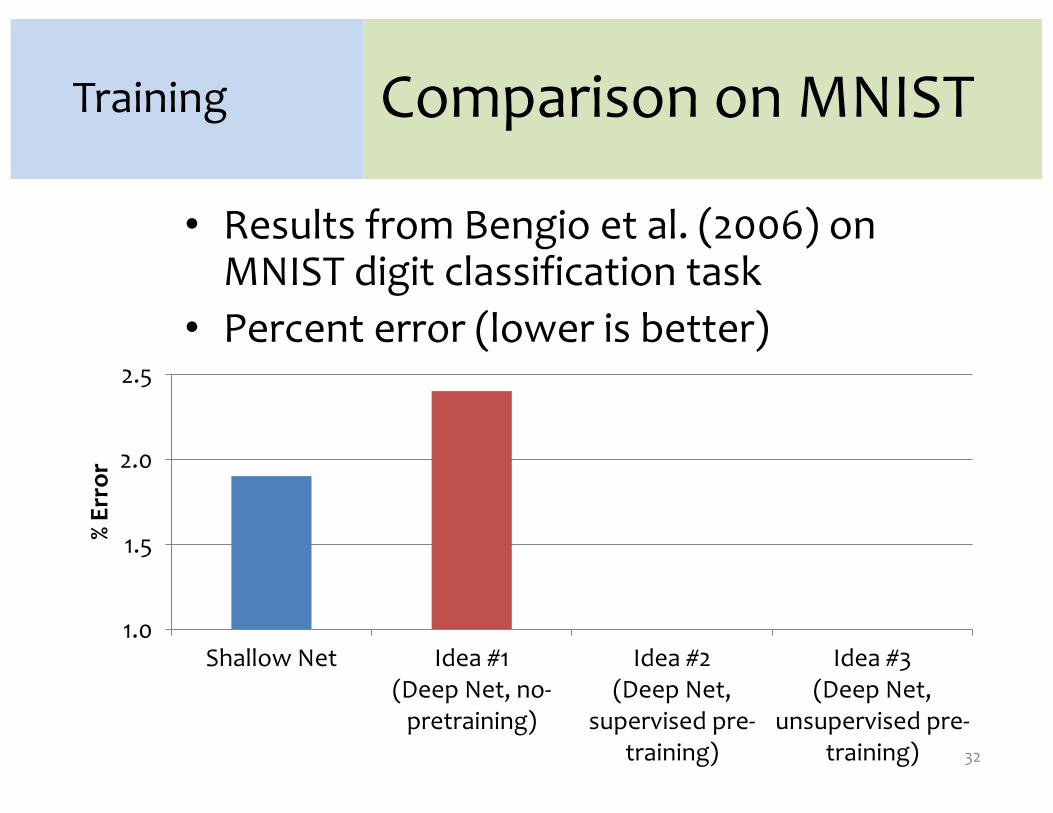
• Results from Bengio et al. (2006) on MNIST digit classification task
• Percent error (lower is better)
Comparison on MNIST
1.0
1.5
2.0
2.5
Shallow Net Idea #1(Deep Net, no-
pretraining)
Idea #2(Deep Net,
supervised pre-training)
Idea #3(Deep Net,
unsupervised pre-training)
% Er
ror
32
Training
• Results from Bengio et al. (2006) on MNIST digit classification task
• Percent error (lower is better)

Idea #1: No pre-training
• What goes wrong?A. Gets stuck in local optima
• Nonconvex objective • Usually start at a random (bad) point in parameter space
B. Gradient is progressively getting more dilute• “Vanishing gradients”
33
Training
� Idea #1: (Just like a shallow network)� Compute the supervised gradient by backpropagation.� Take small steps in the direction of the gradient (SGD)

0.00.5
1.0
-20-15
-10-5
-20
-15
-10
-5
0
Problem A:Nonconvexity
• Where does the nonconvexity come from?• Even a simple quadratic z = xy objective is
nonconvex:
34
Training
z
xy

Problem A:Nonconvexity
• Where does the nonconvexity come from?• Even a simple quadratic z = xy objective is
nonconvex:
35
Training
0.00.5
1.0
-20 -15 -10 -5
-20
-15
-10
-5
0
z
xy

36
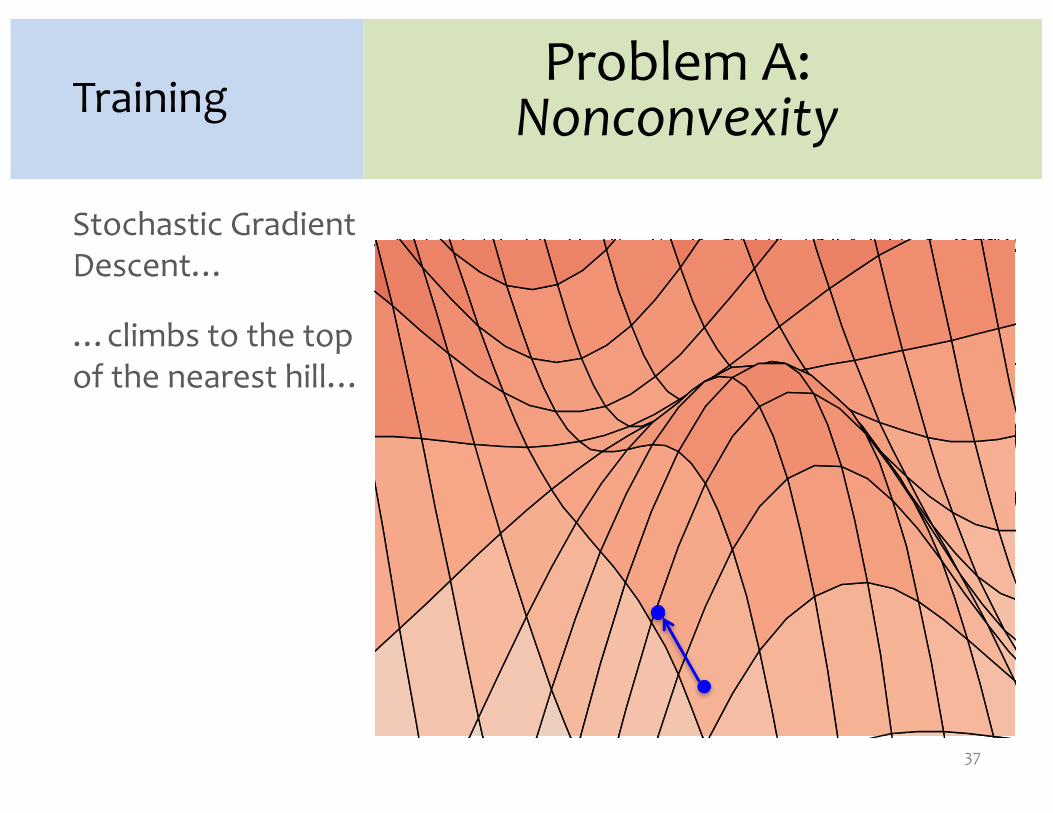
Stochastic GradientDescent…
…climbs to the top of the nearest hill…
Problem A:NonconvexityTraining
37
Stochastic GradientDescent…
…climbs to the top of the nearest hill…
Problem A:NonconvexityTraining

38
Stochastic GradientDescent…
…climbs to the top of the nearest hill…
Problem A:NonconvexityTraining
39
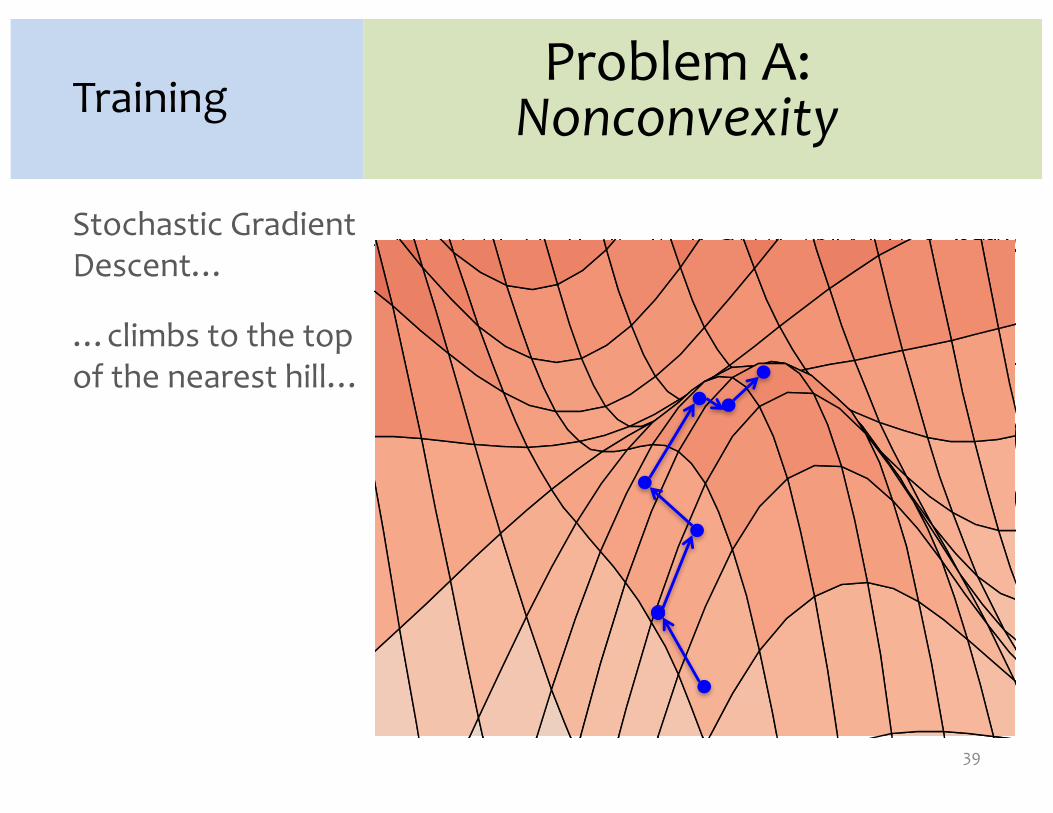
Stochastic GradientDescent…
…climbs to the top of the nearest hill…
Problem A:NonconvexityTraining

40
Stochastic GradientDescent…
…climbs to the top of the nearest hill…
…which might not lead to the top of the mountain
Problem A:NonconvexityTraining
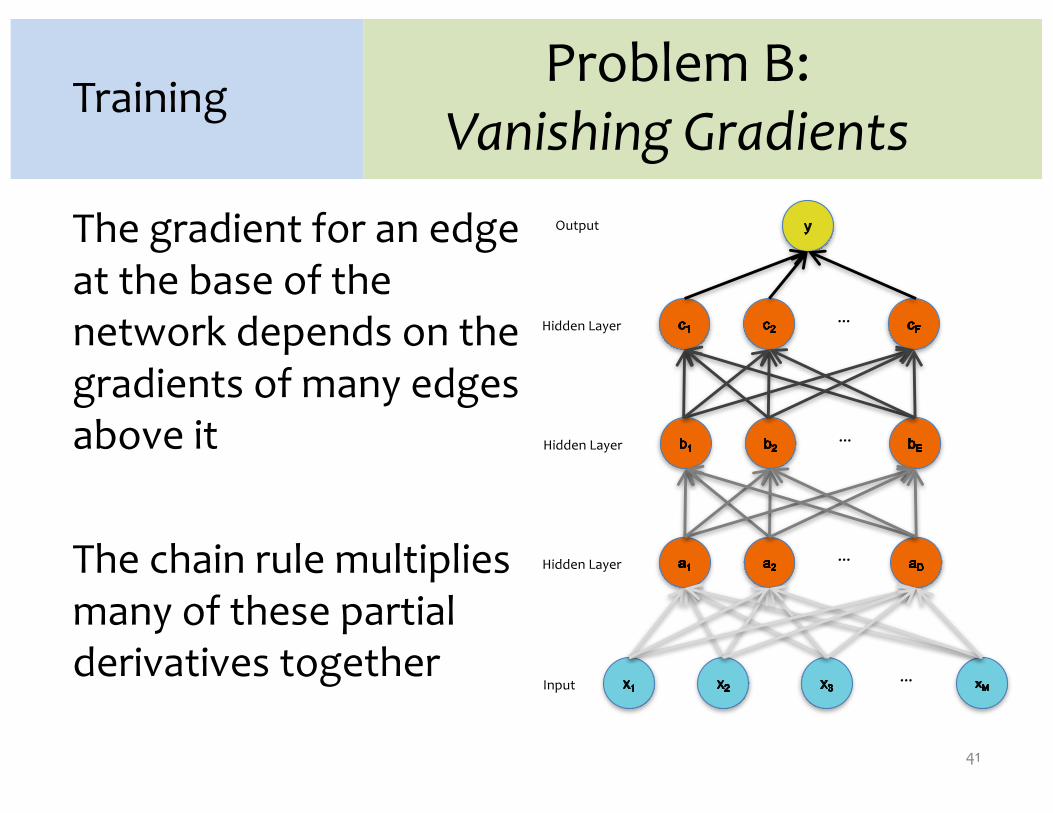
Problem B:Vanishing Gradients
The gradient for an edge at the base of the network depends on the gradients of many edges above it
The chain rule multiplies many of these partial derivatives together
41
Training
…
…Input
Hidden Layer
…Hidden Layer
…
Output
Hidden Layer

Problem B:Vanishing Gradients
The gradient for an edge at the base of the network depends on the gradients of many edges above it
The chain rule multiplies many of these partial derivatives together
42
Training
…
…Input
Hidden Layer
…Hidden Layer
…
Output
Hidden Layer
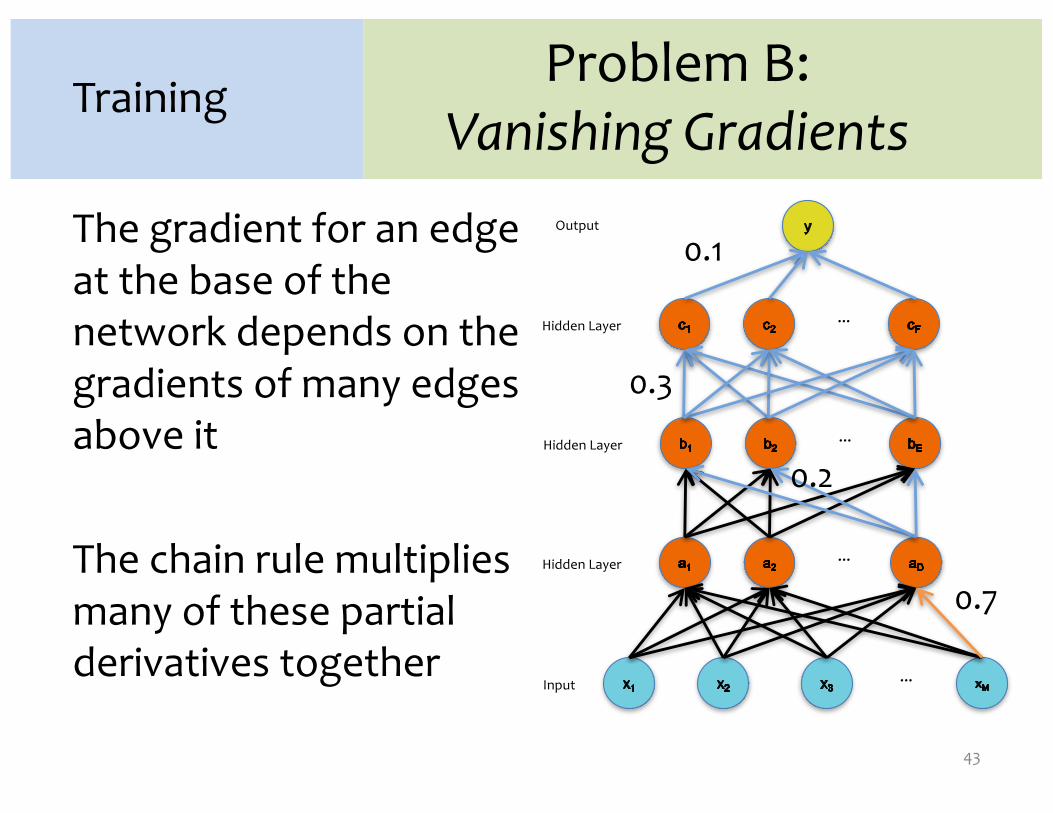
Problem B:Vanishing Gradients
The gradient for an edge at the base of the network depends on the gradients of many edges above it
The chain rule multiplies many of these partial derivatives together
43
Training
…
…Input
Hidden Layer
…Hidden Layer
…
Output
Hidden Layer
0.1
0.3
0.2
0.7

Idea #1: No pre-training
• What goes wrong?A. Gets stuck in local optima
• Nonconvex objective • Usually start at a random (bad) point in parameter space
B. Gradient is progressively getting more dilute• “Vanishing gradients”
44
Training
� Idea #1: (Just like a shallow network)� Compute the supervised gradient by backpropagation.� Take small steps in the direction of the gradient (SGD)

Idea #2: Supervised Pre-training
1. Supervised Pre-training– Use labeled data– Work bottom-up• Train hidden layer 1. Then fix its parameters.• Train hidden layer 2. Then fix its parameters.• …• Train hidden layer n. Then fix its parameters.
2. Supervised Fine-tuning– Use labeled data to train following “Idea #1”– Refine the features by backpropagation so that they become
tuned to the end-task45
Training
� Idea #2: (Two Steps)� Train each level of the model in a greedy way� Then use our original idea

Idea #2: Supervised Pre-training
46
Training
� Idea #2: (Two Steps)� Train each level of the model in a greedy way� Then use our original idea
…
…
Output
Input
Hidden Layer 1
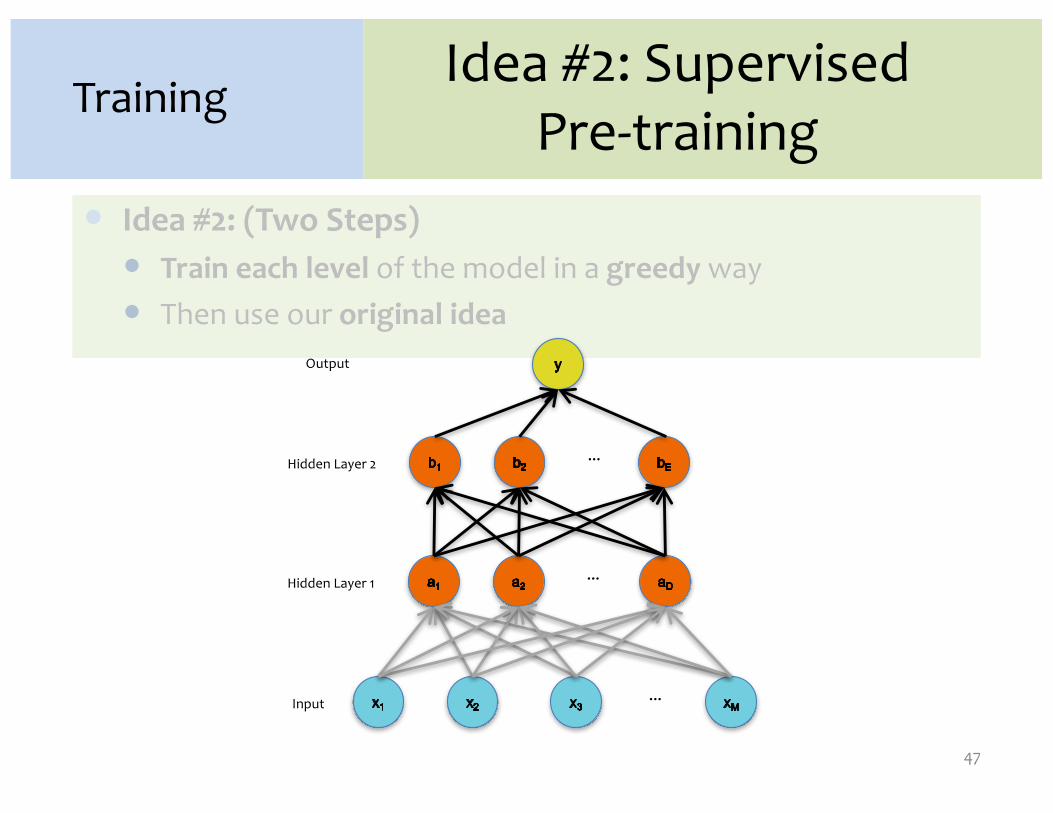
� Idea #2: (Two Steps)� Train each level of the model in a greedy way� Then use our original idea
Idea #2: Supervised Pre-training
47
Training
…
…Input
Hidden Layer 1
…
Output
Hidden Layer 2

Idea #2: Supervised Pre-training
48
Training
� Idea #2: (Two Steps)� Train each level of the model in a greedy way� Then use our original idea
…
…Input
Hidden Layer 1
…Hidden Layer 2
…
Output
Hidden Layer 3
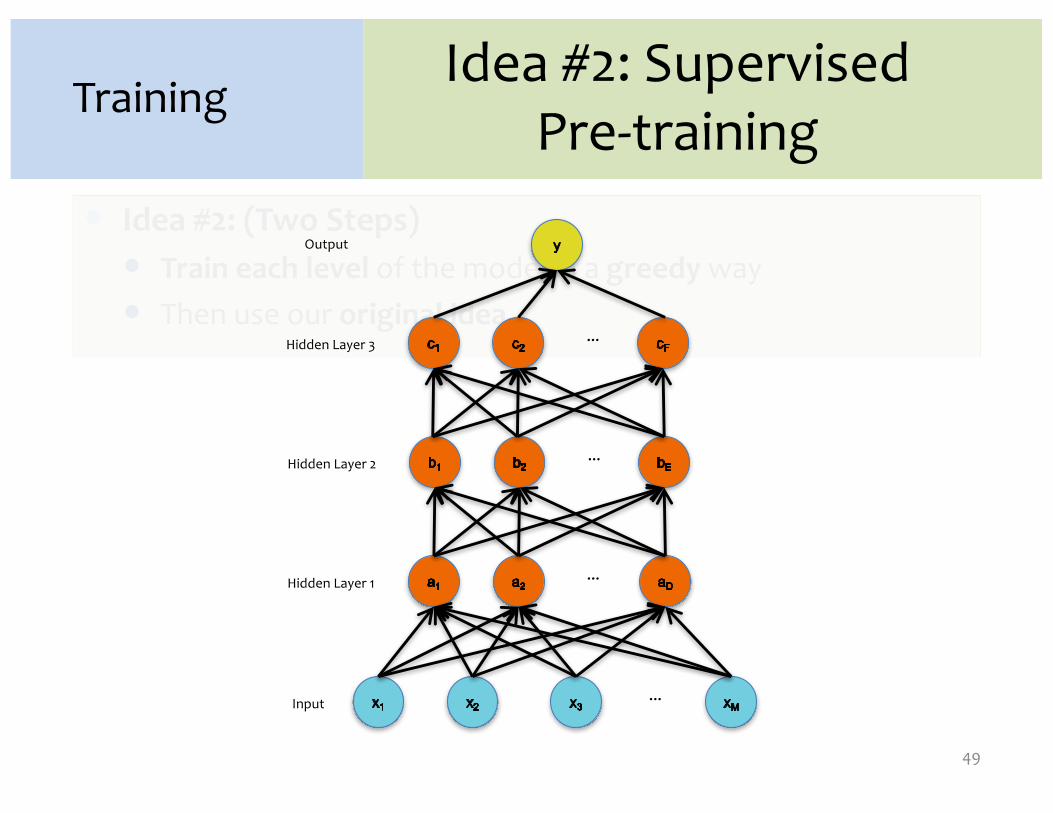
Idea #2: Supervised Pre-training
49
Training
� Idea #2: (Two Steps)� Train each level of the model in a greedy way� Then use our original idea
…
…Input
Hidden Layer 1
…Hidden Layer 2
…
Output
Hidden Layer 3

Comparison on MNIST
1.0
1.5
2.0
2.5
Shallow Net Idea #1(Deep Net, no-
pretraining)
Idea #2(Deep Net,
supervised pre-training)
Idea #3(Deep Net,
unsupervised pre-training)
% Er
ror
50
Training
• Results from Bengio et al. (2006) on MNIST digit classification task
• Percent error (lower is better)

Comparison on MNIST
1.0
1.5
2.0
2.5
Shallow Net Idea #1(Deep Net, no-
pretraining)
Idea #2(Deep Net,
supervised pre-training)
Idea #3(Deep Net,
unsupervised pre-training)
% Er
ror
51
Training
• Results from Bengio et al. (2006) on MNIST digit classification task
• Percent error (lower is better)

Idea #3: UnsupervisedPre-training
1. Unsupervised Pre-training– Use unlabeled data– Work bottom-up• Train hidden layer 1. Then fix its parameters.• Train hidden layer 2. Then fix its parameters.• …• Train hidden layer n. Then fix its parameters.
2. Supervised Fine-tuning– Use labeled data to train following “Idea #1”– Refine the features by backpropagation so that they become
tuned to the end-task52
Training
� Idea #3: (Two Steps)� Use our original idea, but pick a better starting point� Train each level of the model in a greedy way

The solution:Unsupervised pre-
training
53
…
…Input
Hidden Layer
Output
Unsupervised pre-training of the first layer: • What should it predict?• What else do we
observe? • The input!
This topology defines an Auto-encoder.

The solution:Unsupervised pre-
trainingUnsupervised pre-training of the first layer: • What should it predict?• What else do we
observe? • The input!
This topology defines an Auto-encoder.
54
…
…Input
Hidden Layer
…“Input” ’ ’ ’ ’
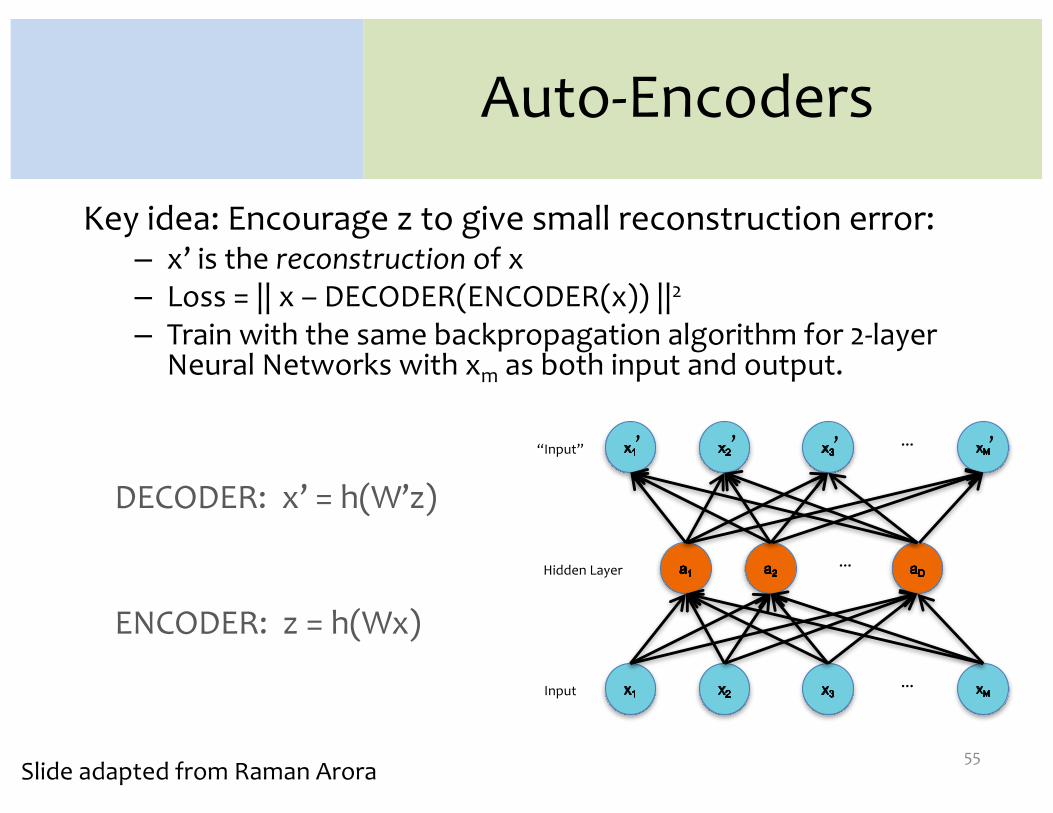
Auto-Encoders
Key idea: Encourage z to give small reconstruction error:– x’ is the reconstruction of x– Loss = || x – DECODER(ENCODER(x)) ||2
– Train with the same backpropagation algorithm for 2-layer Neural Networks with xm as both input and output.
55
…
…Input
Hidden Layer
…“Input” ’ ’ ’ ’
Slide adapted from Raman Arora
DECODER: x’ = h(W’z)
ENCODER: z = h(Wx)

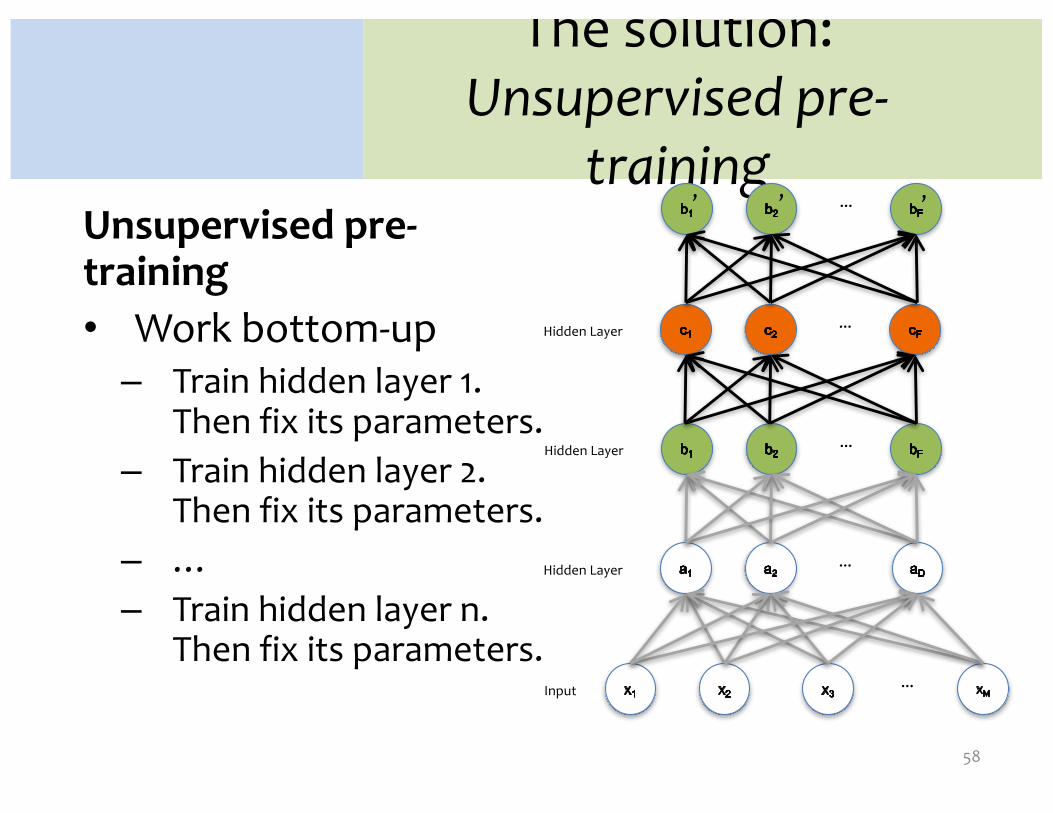
The solution:Unsupervised pre-
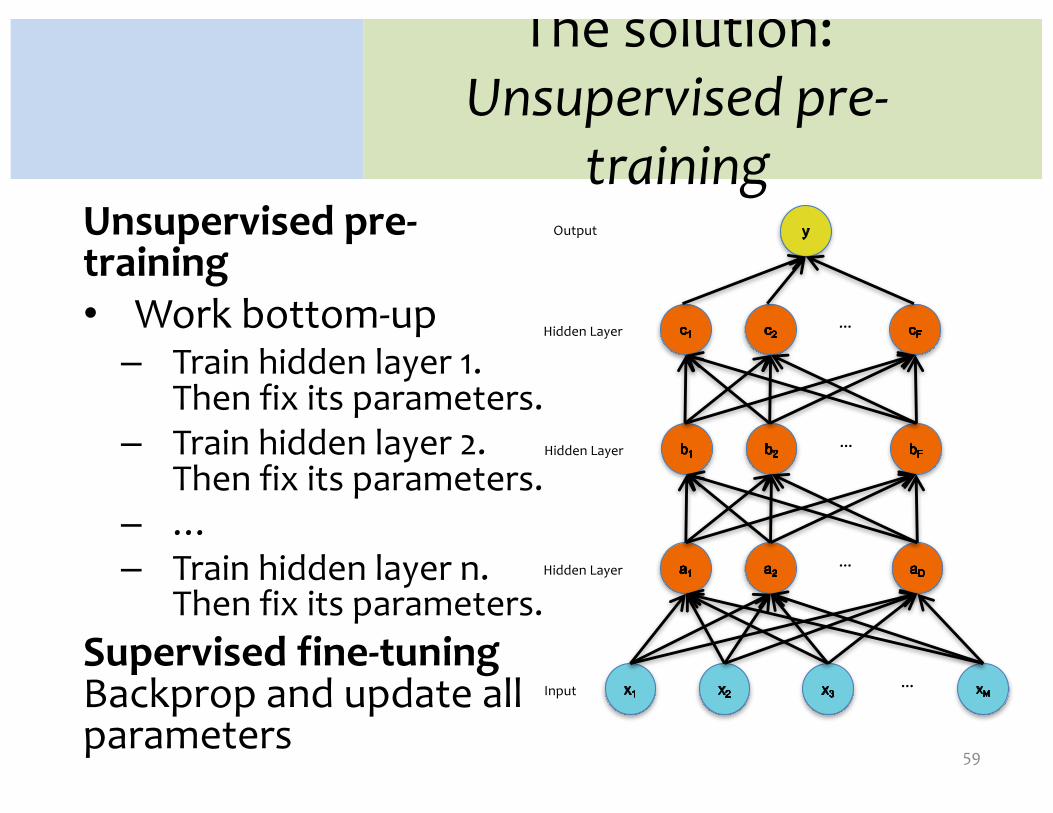
trainingUnsupervised pre-training• Work bottom-up– Train hidden layer 1.
Then fix its parameters.– Train hidden layer 2.
Then fix its parameters.– …– Train hidden layer n.
Then fix its parameters.
56
…
…Input
Hidden Layer
…“Input” ’ ’ ’ ’

The solution:Unsupervised pre-
trainingUnsupervised pre-training• Work bottom-up– Train hidden layer 1.
Then fix its parameters.– Train hidden layer 2.
Then fix its parameters.– …– Train hidden layer n.
Then fix its parameters.
57
…
…Input
Hidden Layer
…Hidden Layer
…’ ’ ’
The solution:Unsupervised pre-
trainingUnsupervised pre-training• Work bottom-up– Train hidden layer 1.
Then fix its parameters.– Train hidden layer 2.
Then fix its parameters.– …– Train hidden layer n.
Then fix its parameters.
58
…
…Input
Hidden Layer
…Hidden Layer
…Hidden Layer
…’ ’ ’
The solution:Unsupervised pre-
trainingUnsupervised pre-training• Work bottom-up– Train hidden layer 1.
Then fix its parameters.– Train hidden layer 2.
Then fix its parameters.– …– Train hidden layer n.
Then fix its parameters.Supervised fine-tuningBackprop and update all parameters
59
…
…Input
Hidden Layer
…Hidden Layer
…Hidden Layer
Output
Deep Network Training
60
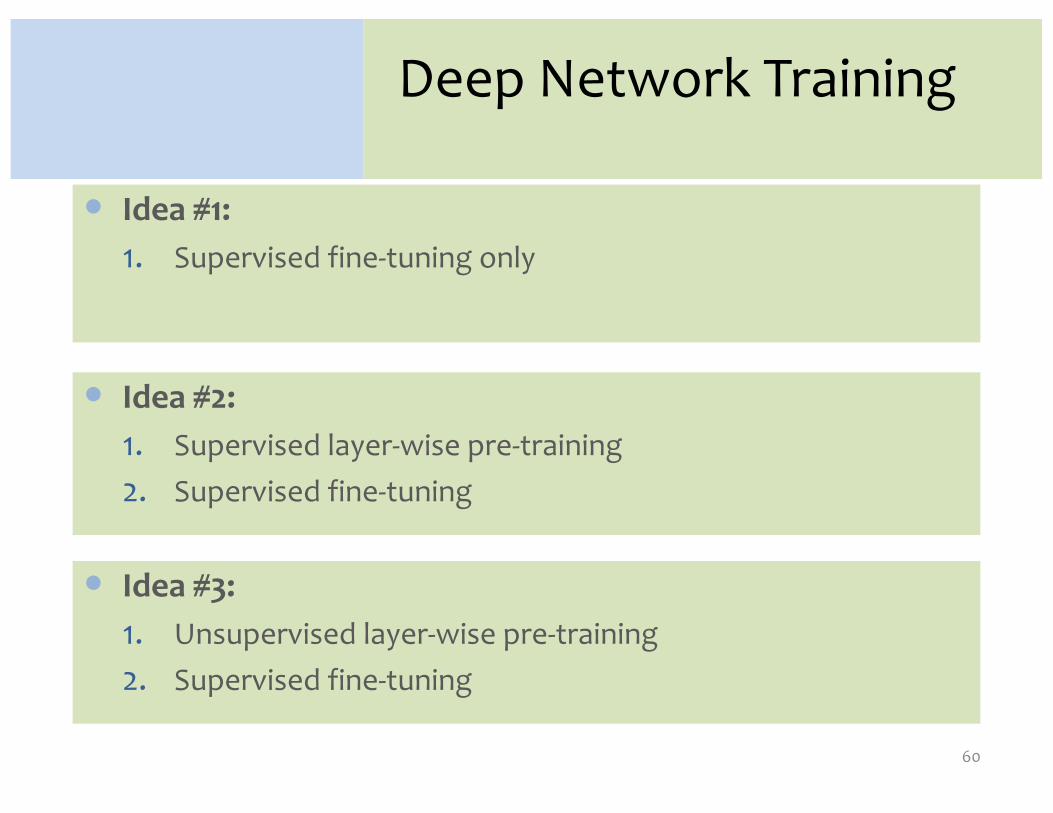
� Idea #3:1. Unsupervised layer-wise pre-training2. Supervised fine-tuning
� Idea #2:1. Supervised layer-wise pre-training2. Supervised fine-tuning
� Idea #1:1. Supervised fine-tuning only

Comparison on MNIST
1.0
1.5
2.0
2.5
Shallow Net Idea #1(Deep Net, no-
pretraining)
Idea #2(Deep Net,
supervised pre-training)
Idea #3(Deep Net,
unsupervised pre-training)
% Er
ror
61
Training
• Results from Bengio et al. (2006) on MNIST digit classification task
• Percent error (lower is better)
Comparison on MNIST
1.0
1.5
2.0
2.5
Shallow Net Idea #1(Deep Net, no-
pretraining)
Idea #2(Deep Net,
supervised pre-training)
Idea #3(Deep Net,
unsupervised pre-training)
% Er
ror
62
Training
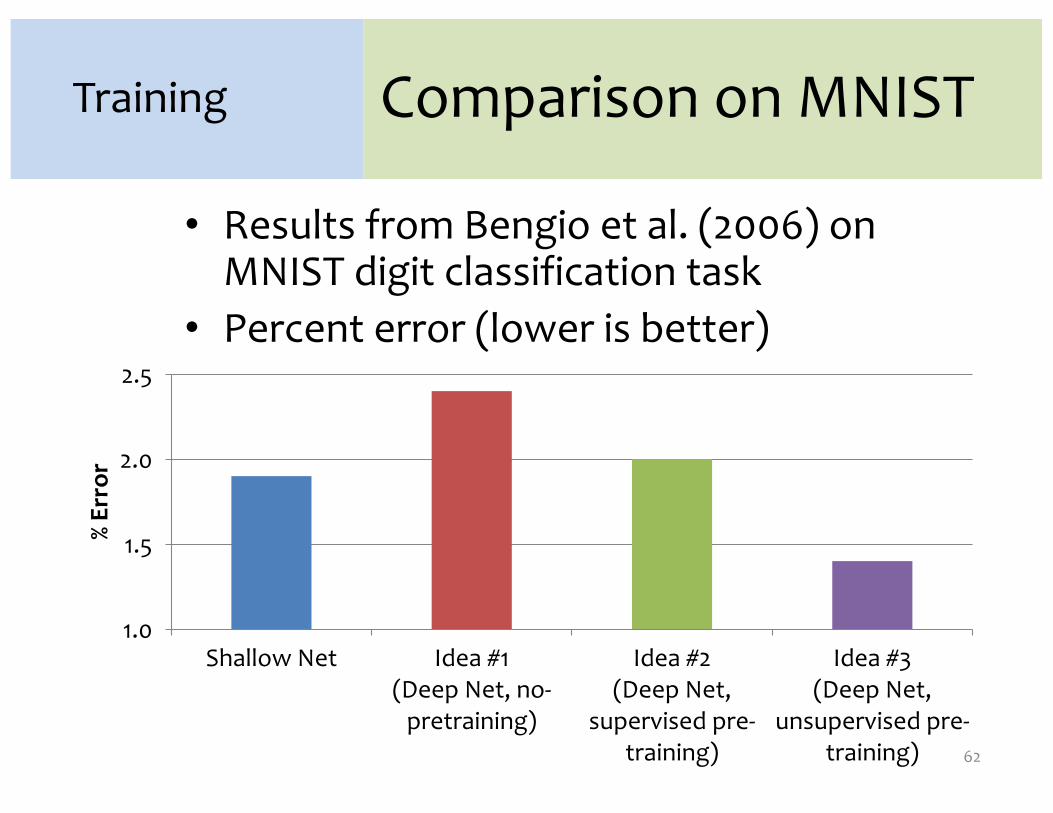
• Results from Bengio et al. (2006) on MNIST digit classification task
• Percent error (lower is better)

Is layer-wise pre-training always necessary?
63
Training
In 2010, a record on a hand-writing recognition task was set by standard supervised backpropagation (our Idea #1).
How? A very fast implementation on GPUs.
See Ciresen et al. (2010)

Deep Learning
• Goal: learn features at different levels of abstraction
• Training can be tricky due to…– Nonconvexity– Vanishing gradients
• Unsupervised layer-wise pre-training can help with both!
64











![Bibliography Deep Learning Papers - University of Michiganclair.si.umich.edu/~radev/dl/dl.pdf · Bibliography Deep Learning Papers * May 15, 2017 References [1] Mart n Abadi, ...](https://static.fdocuments.in/doc/165x107/5b2c83217f8b9aa6198c1d5a/bibliography-deep-learning-papers-university-of-radevdldlpdf-bibliography.jpg)






