MA, AR and ARMA Matthieu Stigler November 14, 2008...
65
Stationary models MA, AR and ARMA Matthieu Stigler November 14, 2008 Version 1.1 This document is released under the Creative Commons Attribution-Noncommercial 2.5 India license. Matthieu Stigler () Stationary models November 14, 2008 1 / 65
Transcript of MA, AR and ARMA Matthieu Stigler November 14, 2008...

Stationary modelsMA, AR and ARMA
Matthieu Stigler
November 14, 2008
Version 1.1
This document is released under the Creative Commons Attribution-Noncommercial 2.5 India
license.
Matthieu Stigler () Stationary models November 14, 2008 1 / 65

Lectures list
1 Stationarity
2 ARMA models for stationary variables
3 Seasonality
4 Non-stationarity
5 Non-linearities
6 Multivariate models
7 Structural VAR models
8 Cointegration the Engle and Granger approach
9 Cointegration 2: The Johansen Methodology
10 Multivariate Nonlinearities in VAR models
11 Multivariate Nonlinearities in VECM models
Matthieu Stigler () Stationary models November 14, 2008 2 / 65

Outline
1 Last Lecture
2 AR(p) modelsAutocorrelation of AR(1)Stationarity ConditionsEstimation
3 MA modelsARMA(p,q)The Box-Jenkins approach
4 Forecasting
Matthieu Stigler () Stationary models November 14, 2008 3 / 65
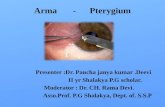
Recall: auto-covariance
Definition (autocovariance)
Cov(Xt ,Xt−k) ≡ γk(t) ≡ E [(Xt − µ)(Xt−k − µ)]
Definition (Autocorrelation)
Corr(Xt ,Xt−k) ≡ ρk(t) ≡ Cov(Xt ,Xt−k )Var(Xt)
Proposition
Corr(Xt ,Xt−0) = Var(Xt)
Corr(Xt ,Xt−j) = φj depend on the lage: plot its values at each lag.
Matthieu Stigler () Stationary models November 14, 2008 4 / 65

Recall: stationarity
The stationarity is an essential property to define a time series process:
Definition
A process is said to be covariance-stationary, or weakly stationary, ifits first and second moments are time invariant.
E(Yt) = E[Yt−1] = µ ∀ tVar(Yt) = γ0 <∞ ∀ tCov(Yt ,Yt−k) = γk ∀ t, ∀ k
Matthieu Stigler () Stationary models November 14, 2008 5 / 65
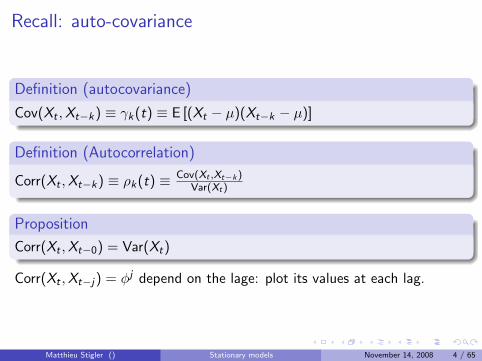
Recall: The AR(1)
The AR(1): Yt = c + ϕYt−1 + εt εt ∼ iid(0, σ2)with |ϕ| < 1, it can be can be written as:
Yt =c
1− ϕ+
t−1∑i=0
ϕiεt−i
Its ’moments’ do not depend on the time: :
E(Xt) = c1−ϕ
Var(Xt) = σ2
1−ϕ2
Cov(Xt ,Xt−j) = ϕj
1−ϕ2σ2
Corr(Xt ,Xt−j) = φj
Matthieu Stigler () Stationary models November 14, 2008 6 / 65

Outline
1 Last Lecture
2 AR(p) modelsAutocorrelation of AR(1)Stationarity ConditionsEstimation
3 MA modelsARMA(p,q)The Box-Jenkins approach
4 Forecasting
Matthieu Stigler () Stationary models November 14, 2008 7 / 65
Outline
1 Last Lecture
2 AR(p) modelsAutocorrelation of AR(1)Stationarity ConditionsEstimation
3 MA modelsARMA(p,q)The Box-Jenkins approach
4 Forecasting
Matthieu Stigler () Stationary models November 14, 2008 8 / 65

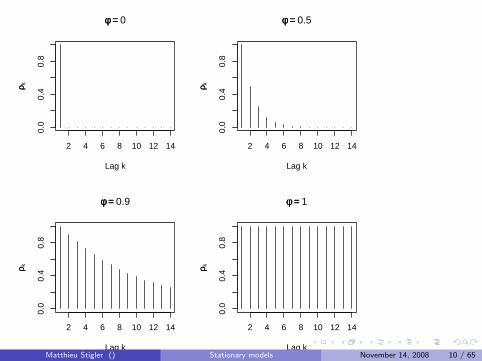
Autocorrelation function
A usefull plot to understand the dynamic of a process is theautocorrelation function:Plot the autocorrelation value for different lags.
Matthieu Stigler () Stationary models November 14, 2008 9 / 65
2 4 6 8 10 12 14
0.0
0.4
0.8
Lag k
ρρ kφφ == 0
2 4 6 8 10 12 14
0.0
0.4
0.8
Lag k
ρρ k
φφ == 0.5
2 4 6 8 10 12 14
0.0
0.4
0.8
Lag k
ρρ k
φφ == 0.9
2 4 6 8 10 12 14
0.0
0.4
0.8
Lag k
ρρ kφφ == 1
Matthieu Stigler () Stationary models November 14, 2008 10 / 65
AR(1) with −1 < φ < 0
in the AR(1): Yt = c + ϕYt−1 + εt εt ∼ iid(0, σ2)with −1 < φ < 0we have negative autocorrelation.
Matthieu Stigler () Stationary models November 14, 2008 11 / 65

phi=−0.2
Time
ar
0 20 40 60 80 100
−2
−1
01
23
phi=−0.7
Time
ar
0 20 40 60 80 100
−3
−1
13
2 4 6 8 10 12 14
−1.
00.
00.
51.
0
Lag k
ρρ k
φφ == −0.2
2 4 6 8 10 12 14
−1.
00.
00.
51.
0
Lag k
ρρ kφφ == −0.7
Matthieu Stigler () Stationary models November 14, 2008 12 / 65

Definition (AR(p))
yt = c + φ1yt−1 + φ2yt−2 + . . .+ φpyt−p + εt
Expectation?
Variance?
Auto-covariance?
Stationary conditions?
Matthieu Stigler () Stationary models November 14, 2008 13 / 65
Lag operator
Definition (Backshift /Lag operator)
LXt = Xt−1
Proposition
See that: L2Xt = Xt−2
Proposition (Generalisation)
LkXt = Xt−k
Matthieu Stigler () Stationary models November 14, 2008 14 / 65

Lag polynomial
We can thus rewrite:
Example (AR(2))
Xt = c + ϕ1Xt−1 + ϕ2Xt−2 + εt
(1− ϕ1L− ϕ2L2)Xt = c + εt
Definition (lag polynomial)
We call lag polynomial: Φ(L) = (1− ϕ1L− ϕ2L2 − . . .− φpLp)
So we write compactly:
Example (AR(2))
Φ(L)Xt = c + εt
Matthieu Stigler () Stationary models November 14, 2008 15 / 65

Outline
1 Last Lecture
2 AR(p) modelsAutocorrelation of AR(1)Stationarity ConditionsEstimation
3 MA modelsARMA(p,q)The Box-Jenkins approach
4 Forecasting
Matthieu Stigler () Stationary models November 14, 2008 16 / 65
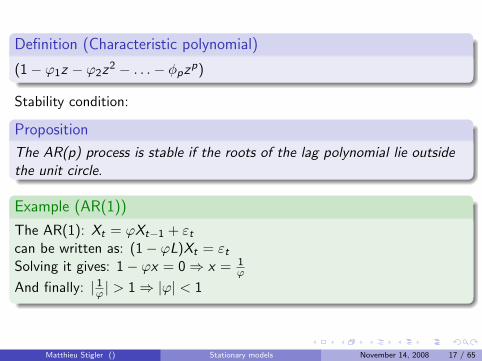
Definition (Characteristic polynomial)
(1− ϕ1z − ϕ2z2 − . . .− φpzp)
Stability condition:
Proposition
The AR(p) process is stable if the roots of the lag polynomial lie outsidethe unit circle.
Example (AR(1))
The AR(1): Xt = ϕXt−1 + εtcan be written as: (1− ϕL)Xt = εtSolving it gives: 1− ϕx = 0⇒ x = 1
ϕ
And finally: | 1ϕ | > 1⇒ |ϕ| < 1
Matthieu Stigler () Stationary models November 14, 2008 17 / 65
Proof.1 Write an AR(p) as AR(1)
2 Show conditions for the augmented AR(1)
3 Transpose the result to the AR(p)
Matthieu Stigler () Stationary models November 14, 2008 18 / 65
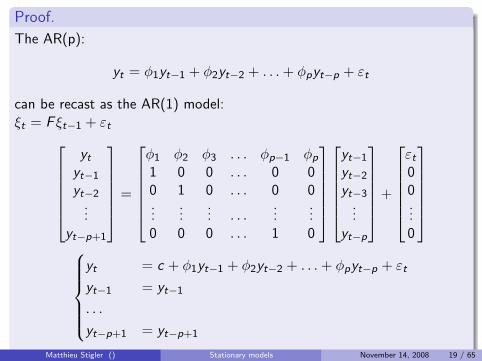
Proof.
The AR(p):
yt = φ1yt−1 + φ2yt−2 + . . .+ φpyt−p + εt
can be recast as the AR(1) model:ξt = F ξt−1 + εt
yt
yt−1
yt−2...
yt−p+1
=
φ1 φ2 φ3 . . . φp−1 φp
1 0 0 . . . 0 00 1 0 . . . 0 0...
...... . . .
......
0 0 0 . . . 1 0
yt−1
yt−2
yt−3...
yt−p
+
εt00...0
yt = c + φ1yt−1 + φ2yt−2 + . . .+ φpyt−p + εt
yt−1 = yt−1
. . .
yt−p+1 = yt−p+1
Matthieu Stigler () Stationary models November 14, 2008 19 / 65
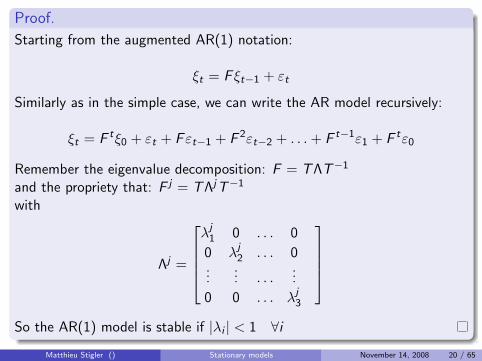
Proof.
Starting from the augmented AR(1) notation:
ξt = F ξt−1 + εt
Similarly as in the simple case, we can write the AR model recursively:
ξt = F tξ0 + εt + Fεt−1 + F 2εt−2 + . . .+ F t−1ε1 + F tε0
Remember the eigenvalue decomposition: F = T ΛT−1
and the propriety that: F j = T ΛjT−1
with
Λj =
λj
1 0 . . . 0
0 λj2 . . . 0
...... . . .
...
0 0 . . . λj3
So the AR(1) model is stable if |λi | < 1 ∀i
Matthieu Stigler () Stationary models November 14, 2008 20 / 65
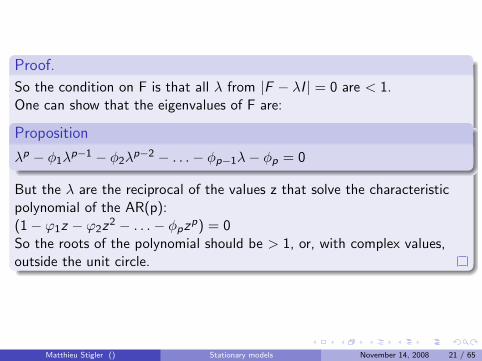
Proof.
So the condition on F is that all λ from |F − λI | = 0 are < 1.One can show that the eigenvalues of F are:
Proposition
λp − φ1λp−1 − φ2λ
p−2 − . . .− φp−1λ− φp = 0
But the λ are the reciprocal of the values z that solve the characteristicpolynomial of the AR(p):(1− ϕ1z − ϕ2z2 − . . .− φpzp) = 0So the roots of the polynomial should be > 1, or, with complex values,outside the unit circle.
Matthieu Stigler () Stationary models November 14, 2008 21 / 65

Stationarity conditions
The conditions of roots outside the unit circle lead to:
AR(1): |φ| < 1
AR(2):I φ1 + φ2 < 1I φ1 − φ2 < 1I |φ2| < 1
Matthieu Stigler () Stationary models November 14, 2008 22 / 65

Example
Consider the AR(2) model:
Yt = 0.8Yt−1 + 0.09Yt−2 + εt
Its AR(1) representation is:[yt
yt−1
]=
[0.8 0.091 0
] [yt−1
yt−2
]+
[εt0
]Hence its eigenvalues are taken from:∣∣∣∣0.8− λ 0.09
1 0− λ
∣∣∣∣ = λ2 − 0.8λ− 0.09 = 0
And the eigenvalues are smaller than one:
> Re(polyroot(c(-0.09, -0.8, 1)))
[1] -0.1 0.9
Matthieu Stigler () Stationary models November 14, 2008 23 / 65

Example
Yt = 0.8Yt−1 + 0.09Yt−2 + εt
Its lag polynomial representation is: (1− 0.8L− 0.09L2)Xt = εtIts characteristic polynomial is hence: (1− 0.8x − 0.09x2) = 0whose solutions lie outside the unit circle:
> Re(polyroot(c(1, -0.8, -0.09)))
[1] 1.111111 -10.000000
And it is the inverse of the previous solutions:
> all.equal(sort(1/Re(polyroot(c(1, -0.8, -0.09)))), Re(polyroot(c(-0.09,
+ -0.8, 1))))
[1] TRUE
Matthieu Stigler () Stationary models November 14, 2008 24 / 65
Unit root and integration order
Definition
A process is said to be integrated of order d if it becomes stationary afterbeing differenced d times.
Proposition
An AR(p) process with k unit roots (or eigenvalues) is integrated of orderk.
Example
Take the random walk: Xt = Xt−1 + εtIts polynomial is (1-L), and the roots is 1− x = 0⇒ x = 1The eigenvalue of the trivial AR(1) is 1− λ = 0⇒ λ = 1
So the random walk is integrated of order 1 (or difference stationary).
Matthieu Stigler () Stationary models November 14, 2008 25 / 65
Integrated process
Take an AR(p):
yt = φ1yt−1 + φ2yt−2 + . . .+ φpyt−p + εt
With the lag polynomial:
Φ(L)Xt = εt
If one of its p (not necessarily distinct) eigenvalues is equal to 1, it can berewritten:
(1− L)Φ′(L)Xt = εt
Equivalently:Φ′(L)∆Xt = εt
Matthieu Stigler () Stationary models November 14, 2008 26 / 65
The AR(p) in detail
Moments of a stationary AR(p)
E(Xt) = c1−ϕ1−ϕ2−...−ϕp
Var(Xt) = ϕ1γ1 + ϕ2γ2 + . . .+ ϕpγp + σ2
Cov(Xt ,Xt−j) = ϕ1γj−1 + ϕ2γj−2 + . . .+ ϕpγj−p
Note that γj ≡ Cov(Xt ,Xt−j) so we can rewrite both last equations as:{γ0 = ϕ1γ1 + ϕ2γ2 + . . .+ ϕpγp + σ2
γj = ϕ1γj−1 + ϕ2γj−2 + . . .+ ϕpγj−p
They are known under the name of Yule-Walker equations.
Matthieu Stigler () Stationary models November 14, 2008 27 / 65
Yule-Walker equations
Dividing by γ0 gives:{ρ0 = ϕ1ρ1 + ϕ2ρ2 + . . .+ ϕpρp + σ2
ρj = ϕ1ρj−1 + ϕ2ρj−2 + . . .+ ϕpρj−p
Example (AR(1))
We saw that:
Var(Xt) = σ2
1−ϕ2
Cov(Xt ,Xt−j) = ϕj
1−ϕ2σ2
Corr(Xt ,Xt−j) = φj
And we have effectively: ρ1 = φρ0 = φ and ρ2 = φρ1 = φ2
Utility:
Determination of autocorrelation function
Estimation
Matthieu Stigler () Stationary models November 14, 2008 28 / 65

Outline
1 Last Lecture
2 AR(p) modelsAutocorrelation of AR(1)Stationarity ConditionsEstimation
3 MA modelsARMA(p,q)The Box-Jenkins approach
4 Forecasting
Matthieu Stigler () Stationary models November 14, 2008 29 / 65

To estimate a AR(p) model from a sample of T we take t=T-p
Methods of moments: estimate sample moments (the γi ), and findparameters (the φ) correspondly
Unconditional ML: assume yp, . . . , y1 ∼ N (0, σ2). Need numericaloptimisation methods.
Conditional Maximum likelihood (=OLS): estimatef (yT , tT−1, . . . , yp+1|yp, . . . , y1; θ) and assume εt ∼ N (0, σ2) andthat yp, . . . , y1 are given
What if errors are not normally distributed? Quasi-maximum likelihoodestimator, is still consistent (in this case) but standard erros need to becorrected.
Matthieu Stigler () Stationary models November 14, 2008 30 / 65
Outline
1 Last Lecture
2 AR(p) modelsAutocorrelation of AR(1)Stationarity ConditionsEstimation
3 MA modelsARMA(p,q)The Box-Jenkins approach
4 Forecasting
Matthieu Stigler () Stationary models November 14, 2008 31 / 65
Moving average models
Two significations!
regression model
Smoothing technique!
Matthieu Stigler () Stationary models November 14, 2008 32 / 65

MA(1)
Definition (MA(1))
Yt = c + εt + θεt−1
E(Yt) = c
Var(Yt) = (1 + θ2)σ2
Cov(Xt ,Xt−j) =
{θσ2 if j = 1
0 if j > 1
Corr(Xt ,Xt−j) =
{θ
(1+θ2)if j = 1
0 if j > 1
Proposition
A MA(1) is stationnary for every θ
Matthieu Stigler () Stationary models November 14, 2008 33 / 65

Time
0 20 40 60 80 100
−2
01
2
θθ == 0.5
Time
0 20 40 60 80 100
−4
02
46
8
θθ == 2
Time
0 20 40 60 80 100
−3
−1
12
3
θθ == −0.5
Time
0 20 40 60 80 100
−4
02
46
θθ == −2
Matthieu Stigler () Stationary models November 14, 2008 34 / 65

2 4 6 8 10
0.0
0.4
0.8
Lag k
ρρ kθθ == 0.5
2 4 6 8 10
0.0
0.4
0.8
Lag k
ρρ k
θθ == 3
2 4 6 8 10
−1.
00.
00.
51.
0
Lag k
ρρ k
θθ == −0.5
2 4 6 8 10
−1.
00.
00.
51.
0
Lag k
ρρ kθθ == −3
Matthieu Stigler () Stationary models November 14, 2008 35 / 65
MA(q)
The MA(q) is given by:
Yt = c + εt + θ1εt−1 + θ2εt−2 + . . .+ θ1εt−q
E(Yt) = c
Var(Yt) = (1 + θ21 + θ2
2 + . . .+ θ2q)σ2
Cov(Xt ,Xt−j) ={σ2(θj + θj+1θ1 + θj+2θ2 + . . .+ θqθq−1) if j = 1
0 if j > 1
Corr(Xt ,Xt−j) =
{θ
(1+θ2)if j = 1
0 if j > 1
Proposition
A MA(q) is stationary for every sequence {θ1, θ2, . . . , θq}
Matthieu Stigler () Stationary models November 14, 2008 36 / 65
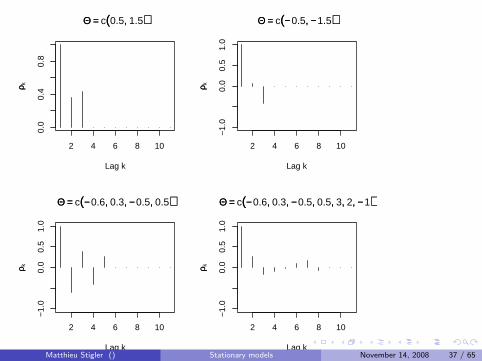
2 4 6 8 10
0.0
0.4
0.8
Lag k
ρρ kΘΘ == c((0.5,, 1.5))
2 4 6 8 10
−1.
00.
00.
51.
0
Lag k
ρρ k
ΘΘ == c((−− 0.5,, −− 1.5))
2 4 6 8 10
−1.
00.
00.
51.
0
Lag k
ρρ k
ΘΘ == c((−− 0.6,, 0.3,, −− 0.5,, 0.5))
2 4 6 8 10
−1.
00.
00.
51.
0
Lag k
ρρ kΘΘ == c((−− 0.6,, 0.3,, −− 0.5,, 0.5,, 3,, 2,, −− 1))
Matthieu Stigler () Stationary models November 14, 2008 37 / 65
The MA(∞)
Take now the MA(∞):
Yt = εt + θ1εt−1 + θ2εt−2 + . . .+ θ∞ε∞ =∞∑j=0
θjεt−j
Definition (Absolute summability)
A sequence is absolute summable if∑∞
i=0 |αi | < 0
Proposition
The MA(∞) is stationary if the coefficients are absolute summable.
Matthieu Stigler () Stationary models November 14, 2008 38 / 65

Back to AR(p)
Recall:
Proposition
If the characteristic polynomial of a AR(p) has roots =1, it is notstationary.
See that:(1− φ1yt−1 − φ2yt−2 − . . .− φpyt−p)yt =(1− α1L)(1− α2L) . . . (1− αpL)yt = εtIt has a MA(∞) representation if: α1 6= 1:yt = 1
(1−α1L)(1−α2L)...(1−αpL)εtFurthermore, if the αi (the eigenvalues of the augmented AR(1)) aresmaller than 1, we can write it:
yt =∞∑i=0
βiεt
Matthieu Stigler () Stationary models November 14, 2008 39 / 65
Estimation of a MA(1)
We do not observe neither εt nor εt−1
But if we know ε0, we know ε1 = Yt − θε0So obtain them recursively and minimize the conditional SSR:S(θ) =
∑Tt=1(yt − εt−1)2
This recquires numerical optimization and works only if |θ| < 1.
Matthieu Stigler () Stationary models November 14, 2008 40 / 65
Outline
1 Last Lecture
2 AR(p) modelsAutocorrelation of AR(1)Stationarity ConditionsEstimation
3 MA modelsARMA(p,q)The Box-Jenkins approach
4 Forecasting
Matthieu Stigler () Stationary models November 14, 2008 41 / 65
ARMA models
The ARMA model is a composite of AR and MA:
Definition (ARMA(p,q))
Xt = c+φ1Xt−1+φ2Xt−2+. . .+φpXt−p+εt−1+θ1εt−1+θ2εt−2+. . .+θεt−q
It can be rewritten properly as:
Φ(L)Yt = c + Θ(L)εt
Theorem
The ARMA(p,q) model is stationary provided the roots of the Φ(L)polynomial lie outside the unit circle.
So only the AR part is involved!
Matthieu Stigler () Stationary models November 14, 2008 42 / 65

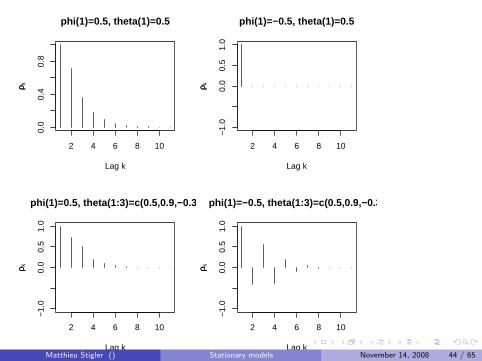
Autocorrelation function of a ARMA(p,q)
Proposition
After q lags, the autocorrelation function follows the pattern of the ARcomponent.
Remember: this is then given by the Yule-Walker equations.
Matthieu Stigler () Stationary models November 14, 2008 43 / 65
2 4 6 8 10
0.0
0.4
0.8
Lag k
ρρ kphi(1)=0.5, theta(1)=0.5
2 4 6 8 10
−1.
00.
00.
51.
0
Lag k
ρρ k
phi(1)=−0.5, theta(1)=0.5
2 4 6 8 10
−1.
00.
00.
51.
0
Lag k
ρρ k
phi(1)=0.5, theta(1:3)=c(0.5,0.9,−0.3)
2 4 6 8 10
−1.
00.
00.
51.
0
Lag k
ρρ kphi(1)=−0.5, theta(1:3)=c(0.5,0.9,−0.3)
Matthieu Stigler () Stationary models November 14, 2008 44 / 65

ARIMA(p,d,q)
Now we add a parameter d representing the order of integration (so the Iin ARIMA)
Definition (ARIMA(p,d,q))
ARIMA(p,d,q): Φ(L)∆dYt = Θ(L)εt
Example (Special cases)
White noise: ARIMA(0,0,0) Xt = εt
Random walk : ARIMA(0,1,0): ∆Xt = εt ⇒ Xt = Xt−1 + εt
Matthieu Stigler () Stationary models November 14, 2008 45 / 65
Estimation and inference
The MLE estimator has to be found numerically.Provided the errors are normaly distributed, the estimator has the usualasymptotical properties:
Consistent
Asymptotically efficients
Normally distributed
If we take into account that the variance had to be estimated, one canrather use the T distribution in small samples.
Matthieu Stigler () Stationary models November 14, 2008 46 / 65

Outline
1 Last Lecture
2 AR(p) modelsAutocorrelation of AR(1)Stationarity ConditionsEstimation
3 MA modelsARMA(p,q)The Box-Jenkins approach
4 Forecasting
Matthieu Stigler () Stationary models November 14, 2008 47 / 65

The Box-Jenkins approach
1 Transform data to achieve stationarity
2 Identify the model, i.e. the parameters of ARMA(p,d,q)
3 Estimation
4 Diagnostic analysis: test residuals
Matthieu Stigler () Stationary models November 14, 2008 48 / 65

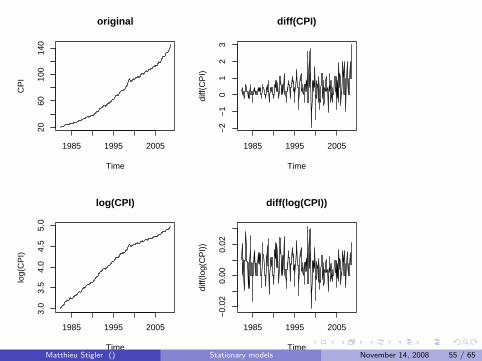
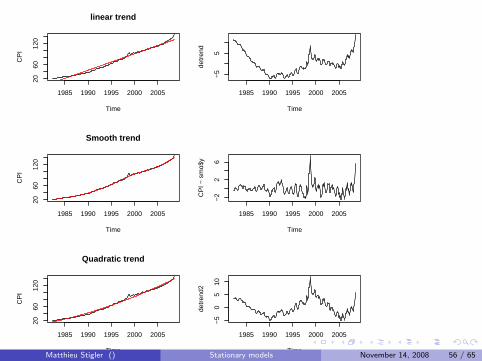
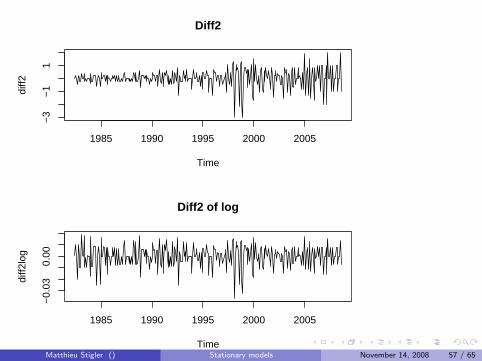
Step 1
Transformations:
Log
Square root
Differenciation
Box-Cox transformation: Y(λ)t
{Y λ
t −1λ for λ 6= 0
log(Y − t) for λ = 0
Is log legitimate?
Process is: yteδt Then zt = log(yt) = δt and remove trend
Process is yt = yt−1 + εt Then (by log(1 + x) ∼= x)∆ log(yt) = yt−yt−1
yt
Matthieu Stigler () Stationary models November 14, 2008 49 / 65
Step 2
Identification of p,q (d should now be 0 after convenient transformation)Principle of parsimony: prefer small models Recall that
incoporating variables increases fit (R2) but reduces the degrees offreedom and hence precision of estimation and tests.
A AR(1) has a MA(∞) representation
If the MA(q) and AR(p) polynomials have a common root, theARMA(p,q) is similar to ARMA(p-1,q-1).
Usual techniques recquire that the MA polynomial has roots outsidethe unit circle (i.e. is invertible)
Matthieu Stigler () Stationary models November 14, 2008 50 / 65
Step 2: identification
How can we determine the parameters p,q?
Look at ACF and PACF with confidence interval
Use information criteriaI Akaike Criterion (AIC)I Schwarz criterion (BIC)
Definition (IC)
AIC (p) = n log σ2 + 2pBIC (p) = n log σ2 + p log n
Matthieu Stigler () Stationary models November 14, 2008 51 / 65
Step 3: estimation
Estimate the model...R function: arima() argument: order=c(p,d,q)
Matthieu Stigler () Stationary models November 14, 2008 52 / 65

Step 4: diagnostic checks
Test if the residuals are white noise:
1 Autocorrelation
2 Heteroscedasticity
3 Normality
Matthieu Stigler () Stationary models November 14, 2008 53 / 65

CPI
Time
CP
I
1985 1990 1995 2000 2005
2040
6080
100
120
140
Matthieu Stigler () Stationary models November 14, 2008 54 / 65
original
Time
CP
I
1985 1995 2005
2060
100
140
diff(CPI)
Time
diff(
CP
I)
1985 1995 2005
−2
−1
01
23
log(CPI)
Time
log(
CP
I)
1985 1995 2005
3.0
3.5
4.0
4.5
5.0
diff(log(CPI))
Time
diff(
log(
CP
I))
1985 1995 2005
−0.
020.
000.
02
Matthieu Stigler () Stationary models November 14, 2008 55 / 65
linear trend
Time
CP
I
1985 1990 1995 2000 2005
2060
120
Time
detr
end
1985 1990 1995 2000 2005
−5
5
Smooth trend
Time
CP
I
1985 1990 1995 2000 2005
2060
120
Time
CP
I − s
mo$
y
1985 1990 1995 2000 2005−
22
6
Quadratic trend
Time
CP
I
1985 1990 1995 2000 2005
2060
120
Time
detr
end2
1985 1990 1995 2000 2005
−5
05
10
Matthieu Stigler () Stationary models November 14, 2008 56 / 65
Diff2
Time
diff2
1985 1990 1995 2000 2005
−3
−1
1
Diff2 of log
Time
diff2
log
1985 1990 1995 2000 2005
−0.
030.
00
Matthieu Stigler () Stationary models November 14, 2008 57 / 65
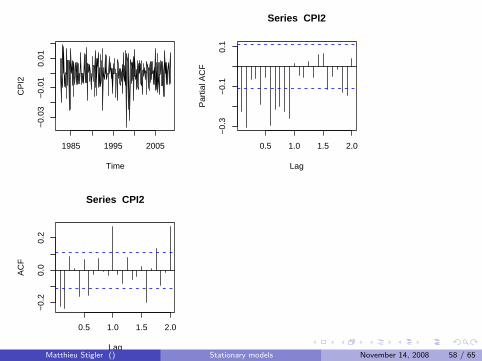
Time
CP
I2
1985 1995 2005
−0.
03−
0.01
0.01
0.5 1.0 1.5 2.0
−0.
20.
00.
2
Lag
AC
F
Series CPI2
0.5 1.0 1.5 2.0
−0.
3−
0.1
0.1
Lag
Par
tial A
CF
Series CPI2
Matthieu Stigler () Stationary models November 14, 2008 58 / 65

> library(forecast)
This is forecast 1.17
> fit <- auto.arima(CPI2, start.p = 1, start.q = 1)
> fit
Series: CPI2ARIMA(2,0,1)(2,0,2)[12] with zero mean
Coefficients:ar1 ar2 ma1 sar1 sar2 sma1 sma2
0.2953 -0.2658 -0.9011 0.6021 0.3516 -0.5400 -0.2850s.e. 0.0630 0.0578 0.0304 0.1067 0.1051 0.1286 0.1212
sigma^2 estimated as 4.031e-05: log likelihood = 1146.75AIC = -2277.46 AICc = -2276.99 BIC = -2247.44
> res <- residuals(fit)
Matthieu Stigler () Stationary models November 14, 2008 59 / 65
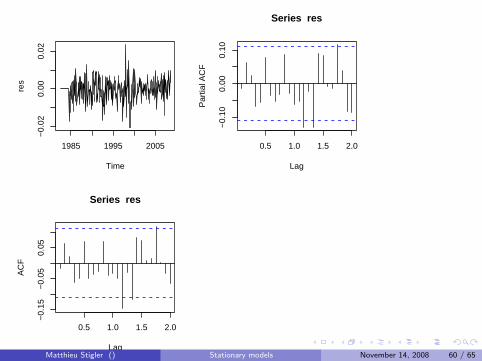
Time
res
1985 1995 2005
−0.
020.
000.
02
0.5 1.0 1.5 2.0
−0.
15−
0.05
0.05
Lag
AC
F
Series res
0.5 1.0 1.5 2.0
−0.
100.
000.
10
Lag
Par
tial A
CF
Series res
Matthieu Stigler () Stationary models November 14, 2008 60 / 65

> Box.test(res)
Box-Pierce test
data: resX-squared = 0.0736, df = 1, p-value = 0.7862
Matthieu Stigler () Stationary models November 14, 2008 61 / 65

●●●●●●●●●●●●●●●●●●●●●●●●●●
●
●●●
●
●
●
● ●●
●
●
●
●
●●
●
●
●
●
●●
●●●
●●
●
●
●●
●●
●
●●
●●
●●
●
●●
●
●
●
●
●
●●
●
●●
●
●●
● ●
●●
●●
●
●●
●
●● ●
●
●●
●
●
●
●
●●
●●●
●
●
●●
●
●
●●
●
●●●
●●
●
●
●
● ●
●
●
●
●●
●
●
●
●●●
●
●●
●
●● ●●
●
●●
●
●
●
●●●
●
●● ●
●●
●●
●
●
●●
●
●●● ●
●
● ●●
● ● ● ●
●
●
●
●●
●
●
● ●
●
●●●
● ●
●
●●
●
●●
●
● ●
●
●
●●●
●
●●
●
●
●
●●
●●●
●●
● ● ●●
●●●
●●
●
●
●●
●●● ●
●
●●●
●
● ●●
●
●●●
●
●
●●
●
● ●●
● ●●●
●
●
●●
●
●●
●
●
●
●
● ●
●
●
●
●
● ●●
●●
●●
●●
●
●●
●●
●
●
●
●
●
●
●●
●●
●
●
●
●
●
● ●
●
●
●
●
●
−3 −2 −1 0 1 2 3
−0.
020.
01
Normal Q−Q Plot
Theoretical Quantiles
Sam
ple
Qua
ntile
s
−0.02 −0.01 0.00 0.01 0.02
040
80
density.default(x = res)
N = 315 Bandwidth = 0.001481
Den
sity
Matthieu Stigler () Stationary models November 14, 2008 62 / 65
Outline
1 Last Lecture
2 AR(p) modelsAutocorrelation of AR(1)Stationarity ConditionsEstimation
3 MA modelsARMA(p,q)The Box-Jenkins approach
4 Forecasting
Matthieu Stigler () Stationary models November 14, 2008 63 / 65
Notation (Forecast)
yt+j ≡ Et(yt+j) = E(yt+j |yt , yt−1, . . . , εt , εt−1, . . .) is the conditionalexpectation of yt+j given the information available at t.
Definition (J-step-ahead forecast error)
et(j) ≡ yt+j − yt+j
Definition (Mean square prediction error)
MSPE ≡ 1H
∑Hi=1 e2
i
Matthieu Stigler () Stationary models November 14, 2008 64 / 65

R implementation
To run this file you will need:
R Package forecast
R Package TSA
Data file AjaySeries2.csv put it in a folder called Datasets in the samelevel than your.Rnw file
(Optional) File Sweave.sty which change output style: result is inblue, R commands are smaller. Also in same folder as .Rnw file.
Matthieu Stigler () Stationary models November 14, 2008 65 / 65