Lunar Gravity Simulator

of 145
-
Upload
andrea-spaggiari -
Category
Documents
-
view
216 -
download
0
Transcript of Lunar Gravity Simulator
-
8/2/2019 Lunar Gravity Simulator
1/145
C O N T R A C T O RR E P O R T
NASACR1 2 3 3V. 2c.1
LOAN COPY: RETURN TQKlRTLAND AFB, N MEXF.F\J /L (WLIL-2)
LUNAR GRAVITY SIMULATORI1
byOhio
r Langley Research CenterE R O N A U T I C SN DP A C E D M I N I S T R A T I O N W A S H I N G T O N , D . C . DECEM BER 1968
-
8/2/2019 Lunar Gravity Simulator
2/145
TECH LIBRARY KAFB, NM
00b0562NASA CR-1234
A LUNAR GRAVITY SIMULATORVOLUME I1
By Richard J . Morgen
Distr ibut ion of thi s rep or t is prov ided in the interes t ofinformationexchange.Responsibili ty or hecontentsr e s i d e s i n the author or organization that p r e p a r e d it.
F r o m a thesis ent itle d "The Design of a Vertical Lunar Gravi tySimulator" subm it ted to Case Inst i tute of Technology inpar t ia l fu l f i l lment of the requirement for the Degree ofM ast er of Science in Mechanical Engineer ing.
Pre par ed u nd er C on trac t No. NAS 1-7459 byCASE WE STERN RESERV E UNIVERSITYCleveland, Ohiofor Langley Research Cente r
NAT IONA L AERONAUTICS AND SPACE ADMINISTRATION-~For sale by the Clearinghouse for Fede ral Scie ntifi c and Technical nformation
Springfield , Virginia 22151 - CFSTl price $3.00~
-
8/2/2019 Lunar Gravity Simulator
3/145
-
8/2/2019 Lunar Gravity Simulator
4/145
ABSTRACT
The designf a vertical lunar gravity simulatorspresented. The simulation technique involves negating thevarious limb segments spearately using constant-force negatorsprings. Overhead support is provided by magneticir padswhich offer negligible resistance to horizontal movement.The torso harness that is used provides forix degrees offreedom over wide rangef movements.
The dynamic behavior of the lunar gravity simulatoris considered. Indications are that low fatigue-life negatorcoils mounted back-to-back will be suitables constant-force, long-deflection springs. conical drum, adjustable-force negator unit is optimizedo r minimum weight. A tech-nique for determing the mass and center of mass of the
various body segments is also presented.n analysis todetermine the omect attachment points or negating theimbsand torso is presented. It is recornended that negator Coilsfthe lowest rated fatigue life be used as constant-force,ow-deflection spring elements.
iii
-
8/2/2019 Lunar Gravity Simulator
5/145
-
8/2/2019 Lunar Gravity Simulator
6/145
TABLE OF CONTENTS
PageABSTRACTTABLE OF CONTENTSLIST OF FIGURESLIST OF SYMBOLS1.0 INTRODUCTION
1.1 Introduction1.2 Types Of Simulators1.3 General Description of Case Simulator
2.0 DESIGN EQUATIONS FOR NEGATOR UNITSIntroduction2.1 Force Vs. Extension
2.1.1 Simple extension type2.1.2 Torque motor type
2.2 Fatigue Life Characteristics2.2.1 Force to weight ratios. fatigue life2.2.2 Adjustability
3.0 SIMULATOR DYNAMICS3.1 Simple Approximate Solutions3.2 One-Dimensional Simulator Dynamics3.3 Two-Dimensional Simulator Dynamics
4.0 NECATOR UNIT DESIGN
iiiV
vi iix1125991111243131333838414853
-
8/2/2019 Lunar Gravity Simulator
7/145
Page4.1 Design Techniques
4.1.1 Width alternation4.1.2 Backwound-frontwound techniques4.1.3 Adjustment
4.2 Optimum conical mrm design5.0 HARNESS DESIGN
5 . 1 Cable Suspension Analysis5 . 1 . 1 4-Point torso suspension5.1.2 "L-C brace'' torso suspension5.1.3 Limb suspension
5.2 Segment Weight Determination6.0 PROTOWE SYSTEM
6 . 1 Negator Units6.2 Magnetic Air Pads6.3 Prototype Harness
REFERENCESAPPENDIX A Two-Dimensional Simulator DynamicsAPPENDIX B CompterprOgrams
545455565774
747575768593
939698
1 0 41061 2 1
vi
-
8/2/2019 Lunar Gravity Simulator
8/145
LIST OF F'IGURES
Figure
1.11.21.3
2.12.22.32.4
2.5
2.6
2.7
2.82.92.10
2.113.13.2
3.3
Title Page
Sketch of Inclined-Planeimulator 34-Point Torso Suspension Vertical Simulator 6"L-C Brace"orsouspensionertical 8SimulatorNegatorimplextensionoil 10Two Negator oils ounted ack-To-Back 10Sketch of Length f egator aterial 2Force Characteristics For H16P38 NegatorCoil 20Force Characteristics or H20R47 NegatorCoil 21Force Characteristics o r H25S48 NegatorCoil 22Force Characteristics of Frontwound-BackwoundNegatorl 25Torque haracteristics f orque-Motor 9Stress actor-Fatigue ife elationship 2F'unctional Relation Between Weight-To-ForceRatio And Rated Fatigue Lifef Negator Coils34Adjustabilityunction6Typicalne-Dimensional Jump 45Dynamic Effects of Using Different FatigueLifeTwo-Dimensional Dynamicump Showing A i rPad 49
vii
-
8/2/2019 Lunar Gravity Simulator
9/145
3.4
3.5
4.14.2
4.34.44.55.1
5.25.36.1
6.26.36.46.56.66.76.86.9AI.
Dynamic Effects of Using Different FatigueLifeoilsEynamic Effects f Increasing OverheadWeight 52Adjustable Conical rum Negator Unit Design 58Optimum Force-To-Weight Ratios For SH31U58Coilsountedack-To-Back9Optimumurves - SH31U58oil0Optimum Force-To-Weight Ratios or SL31U69 71OptimumurvesorL31U69oil2Segment Weight Determination: rm ImmersionTank 88Segment Weight Determination: Balance o a r d 9 0Balance Board Showing Load Cell and PivotPrototype Back-To-Back Adjustable ConicalDr um Negator UnitMagnetic Air PadMagnetic Air Pad ClusterPrototype HarnessPrototype HarnessPrototype HarnessPrototype Harness: Seat
91
94979799100101102
Prototype Harness: Rear Bearing Pivot PointPrototype Harness: Side Bearing Pivot PointLmar Gravity Simulator Model
103103107
viii
-
8/2/2019 Lunar Gravity Simulator
10/145
LIST OF SYMBOLSa
bC
d
EEmFFC
F2F1f
hI
dis tance f rom joint (knee o r elbow) t ocable attachment pointspoke thicknessm-1/3 (body build index)t o t a l body densi tylength between negator drumsdens i ty of lower arm plus handdensity of lower leg plu s foo tdens ity of upper mdensi ty of lower legenergyYoung'smodulus of negator materialYoung'smodulus of conical sec t ionforce output of negator coilconstant negator forcelimb negating forcereac t ion force a t h ip (or shoulder) jointforce pe r un i t lengthacce le ra t ion due t o ea r th gra v i t yheight of subjectspoke widthmoment o f in e r t i a of negator material
ix
-
8/2/2019 Lunar Gravity Simulator
11/145
IsI C
KL1L1L2
l 2M1M2MMnmP
11'crQx
RRnR1R2
moment of i n e r t i a of negator spoolmoment of inert ia of coi led por t ion ofne ga to r c o i l24pw L/Et o t a l l e n g t h of ne ga to r c o i lleng th of unwound po rt io n of nega tor co i llength of upper limblength of lower limbd i s t a n c e t o c e n t e r of mass of upper limbd i s t a nc e to c e n te r of mass of lower limbmass of upper limbmass of lower limbmass of t e s t subjectt o t a l mass of nega tor co i l sthiclmess of conical sec t ionpressurec r i t i c a l backing loadgeneralized forceflange thiclmess of conical sec t ionradius of curvaturena tura l r ad ius of curvature of negator coi lsradius of take-up dmrm for torque-motorradius of output dmrm for torque-motorradius of take-up dmrm for ne ga to r c o i l
X
-
8/2/2019 Lunar Gravity Simulator
12/145
Rno i n i t i a l natural. radius of curvature ofne ga to r c o i lR0
rad ius of negator take-up drumRn/Rstress f a c t o r t / R ntorque output of torque-motor
rsfTTmTn
ki ne ti c energy of t e s t subjectki ne ti c energy of negator
T1T2
cable tension a t shoulderscable tension a t hips
TSt
kinet ic energy of negator spoolthickness of negator coilweight of t e s t su bj ec t minus weight of limb
wt weight of t e s t subjectwidth of negator c o i lextension of negator coi ldis tance f r o m ne u t r a l axisYcone anglebuckling load factor
aB
small increment
s t r a i ne angle
P o i s son ' s r a t ioJ
xi
-
8/2/2019 Lunar Gravity Simulator
13/145
P
PWU
(5WT
w( 1
density of negator materialweight densityf negator materialstressbending stress at tipf spokeworking stressshear stressangular velocityd/dtd2/dt2x - directiony - directionz - direction
x i i
-
8/2/2019 Lunar Gravity Simulator
14/145
IXTRODUCTION
1.1 IntroductionManned lunar flights will be realizedn the near
future. Exploration of the lunar surface byan is anessential part of the Appolo lunar mission. Effects ofthe lunar gravity on the ability of an explorer to performself-locomotive tasks will probably be appreciable. Becausethe lunar environment is considerably different from thaton the earth, the explorersi l l havelto learn how to adjusttheir accustomed methods of walking, etc.
There arewo major factors affecting lunar explorer'sperformance: 1) Lunar gravity is approximately/6 earthgravity, and ) The explorer will be wearingspace suit withlife support equipment. o quantitatively evaluate theexpected performance oflunar explorer before the actualApollo flight, it becomes necessary to simulate realisticallythe lunar environment. Kinematic and physiological datacan then be collected from test subjects performing therequired lunar tasksn a simulated lunar environment. Conclu-sions can berawn as to how the lunar gravity and spacesuitrestrictions w i l l affect the explorer's performance.
1
-
8/2/2019 Lunar Gravity Simulator
15/145
1.2 TvDes Of Simulators
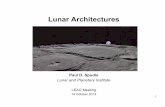
Several types f lunar gravity simulators have beenconstructed and many others proposed. 'Langley ResearchCenter has developed cable suspension, inclined plane simu-latorC7'that has been used extensivelyn research programs,(see, fo r example, reference [111>. In this simulator thetest subject is held by cables inclinedo that heormsan angle f approximately 9 . 5 O with the loor. (see Figure1.1). The test subject has degrees of freedom: 1) walkingstraight ahead, ) jmping straight up, and) rotatingforward. The subject cannot move sideways at all, but duringnormal walking there isn't normally very much sideways movemenThe simulator has worked well in self-locomotive studies.
Several types f six degree of freedom simulatorshave been constructed. any of these have been used tosimulate a zem-gravity situation. Most f them involveseries of gimbals on bearings which allowtest subject torotate about his center ofass in any rotational direction(see, for example, reference C71, Figure, page 11-91.When adapted fo r use asunar gravity simulators these usuallysuffer from the fact that the necessary mechanisms involvethe addition ofconsiderable amount f mass to the test
2
-
8/2/2019 Lunar Gravity Simulator
16/145
Figure 1 .1Sket ch of Incli ned-P lane Sim ulato r
3
-
8/2/2019 Lunar Gravity Simulator
17/145
subject . This canbe a t least pa r t l y ju s t i f i e d because alunar explorer w i l l be burdened with a great de a l of a dd i t iona lmass in the form of a spacesuit and l i f e support equipment.However, du rin g bio me dic al tes tin g, it becomes nec essary t oadd s t i l l more mass in t h e form of medical data gatheringequipment; and the t o t a l r e s u l t a n t mass may be more tha n thelunar explorer w i l l carry while on the moon.
In addi t ion , these s imula to r s may have no pro vis ion fornegation of th e t e s t sub je c t ' s arms and le gs . The main prob-lem i s t o e f f e c t ive ly ne ga te the to r so and s t i l l al low fortrue sim ulati on when th e subject pivots about h i s center ofmass. However, about 30-35% of the body mass i s i n the limbsand t h i s fac t should no t be neglected. The t o t a l body cente rof mass can ver y app rec iab ly during normal mov&ents ,c131butit i s f e l t t ha t t he c e n te r s of mass of the ind ivi du al bodysegments w i l l n o te x h i b i t h i s same variation.Therefore, i fthe body segments are negated separately, better simulationshould r esu l t ov er a wider range of normal body movements.
4
-
8/2/2019 Lunar Gravity Simulator
18/145
1.3 General Description~ ~Of Case Simulator
The Initial design work on the Caseunar gravitysimulator was based on the following observations:
1) S i x degrees of freedomn a simulator would bedesirable since even the simplest self-locomotive tasks involvemovement that requires six degreesf freedom; and,f thesemovements are neglectedn a simulator, erroneous test resultscould result. Moreover, various stability problems could bepresent which would not show-up if the test svbject were con-strained to less thandegrees of freedom.
2 ) Elementary self-locomotive tasks do not require thefull use of alldegrees of freedan. One must be able torotate in any direction, but one need not have the capabilityto rotate full 360 in any direction. Rotationn the simu-lator should be far enough to give the subjectn indicationof when he has lost his balance.
3) It would e desirable to have the test subjectstanding upright rather than being held almost horizontal asin the inclined plane simulator.
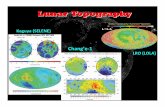
A prel iminary concept of a simulator based on the aboveobservations evolved which involvedtest subject being heldsomewhat like puppet and standingn an upright position(see Figure 1.2). The desire was to negate the majorody
5
-
8/2/2019 Lunar Gravity Simulator
19/145
f5/
iFigure 1 . 2 - - 4-Point T o r s o Suspension
6
-
8/2/2019 Lunar Gravity Simulator
20/145
ccanpnents separatelyn an effort to achieve betterimu-lation. Constant force springs were toe used to negatethe body segment's weight. It soon became evident duringpreliminary investigations (which includedfull-sizeprototype mock-up) that the resultant cable interference wasintolerable. It was still felt that the body componentsshould be negated separately, butbetter method whould haveto be found for achieving this objective.
The concept that eventually evolved is shown in Figure1.3. The torso is negated by an "L-C" brace which allowed forrotation, and the legs andrms are negated by separate cables.A further innovation was to attach the leg suspension cablesdirectly to the torso harness mechanism infashion whichallows the cables to remain directly above their attachment
points.The constant force spring elements are negator spring
units which are further described in the succeeding sections.Overhead support is provided by magnetic air pads actingagainst a smooth steel ceiling which exhibitlarge holdingforce while offering negligible resistance to horizontalmovement. These air pads are described in another report.o lThe harness design for the Case simulator was done by theIndustrial Design Deparbent of the Cleveland Institute of Artmrking with Case Institutef Technology.
-
8/2/2019 Lunar Gravity Simulator
21/145
r;
Figure 1 . 3 - - "L-CBrace ' ' Torso Suspension
8
-
8/2/2019 Lunar Gravity Simulator
22/145
DESIGN EQUATIONS FOR NEGATOR UNITSA negator spring isdevice which provides constant
tension fo r any degree of extension within its designed range.The type proposed for this application is shown in Figure.1.It consists ofprestressed strip f flat spring steel,coiled tightly around bushing. The spring can be uncoiledby applying a force, the magnitudef which depends on thegeometry and dimensions f the coil. Figure .2 depictstwo coils mounted back-to-back in the configuration proposedfo r use in the lunar gravity simulator.
The force obtained by unwindingnegator coil isalmost perfectly constant (i.e., force-extension gradient iszero). Through various methods of manufacturing control,
gradients ranging from slightly positive to slightly negativecan be achieved.
A dynamic analysis f the proposed system indicatesthat a negator having slightly positive force-extensiongradient is desirable. The reasono r this is that as thenegator coil is unwound, an increasing force must be exertedto overcome the weightf the extended portion.
9
-
8/2/2019 Lunar Gravity Simulator
23/145
Figure 2 . 1Negator Simple Extension Coil
2-FF igur e 2.2
Two Negator Coils Mounted Back-To-Back
10
-
8/2/2019 Lunar Gravity Simulator
24/145
2.1 Force Vs Extension2.1.1 Simple extension coil
In this section the equations describing the forceverses extension o r simple negator coils mountedn a back-to-back configuration will be derived. The derivation is based ona paper by otta. C181
First the problem of bendingf a thin plate will be con-sidered: A bending moment is applied tothin plate as shownin Figure 2.3. We will assume that the simple beam formulasapply. Consider a thin plate bent into an arc withradiusof curvature R by a moment M. Using Hmke's Law (assuminga = oY
Now it is observed that for thin plates, there is very littledistortion of a cross-section in the y-z plane except at theedges, therefore:
E = oZ ( 2 .3 )and, consequentlyr o m Equation 2,
11
-
8/2/2019 Lunar Gravity Simulator
25/145
Figure 2 . 3 - - Sketch OfLength Of Negator Mate r ia l
12
-
8/2/2019 Lunar Gravity Simulator
26/145
and 1 2x E x - x= - c2
EX = (+UXThe relation between the resultant radiusf curvatme andE is:X
E = y/RXThe end conditions require that:
E w t 3M - nsince I = w t /12
M = E1(1-p )R
( 2 . 7 )
(2.10)
(2.11)
However, this equation,2.111, does not apply to the negatorcoil because, although the negator material is very thin, thedistortion of the cross-sectionn the y-z plane is servereand Equation ( 2 . 3 ) does not apply. Instead
uz = 0 (2.12)
13
-
8/2/2019 Lunar Gravity Simulator
27/145
and
1x E x= - 0 (2 .14)
The equations analogous t o equ ation s 2 . 8 - 2 . 1 1 are then asfollows
+y/2
-y/ 2M. 1 oxwydy" = ELx R
E1R= - (2.15)This i s th e moment-curvature rela tio n, ob tain ed us ing elementarybeam theory.
The ne gato r c o i l ha s an in i t i a l r a d i us of curvature, Rn.If w e apply a moment M:
14
-
8/2/2019 Lunar Gravity Simulator
28/145
M = EI( - - 1F) . (2.16)RnTo determine the energystored i n a length of c o i l L ;consider the following sketch:
The energy, f , i s :0
E = - J Md00n
e = - d0 = - &LR R2R
E = + 1 E I ( r - a) --* dR .1 Ln RRnI n te g r a t ing th i s r e l a t ion , w e obtain:( 2 . 1 7 )
Now con sider the following sketch:
15
-
8/2/2019 Lunar Gravity Simulator
29/145
al!FQ12The energyofeach coil in s ta te (1) s
1+"- 2 1 .Rl? RnR
The energy when pulled straight, (21, i s
EIL 1 2E -(-)2 2 R-
2 1RnR 2'= EIC- - (2.19)TO f ind F as a function of L w e must f i n d R as a functionof L.
16
-
8/2/2019 Lunar Gravity Simulator
30/145
L Length of c o i lt = T h i c h e s s
W can write
So the forc e equ atio n becomes:
F = - w t3 2 12 t2 2 t - 3 .RnCRio+"$L-l)I Ria+$L-1) ( 2 . 2 0 )VottaC18 in di ca ted ha t he na tura lrad iuso fcurva ture , Rn ,undergoes a change during heat treabnent according t o t h e follow-ing re la t ion
Sub s t i tu t ing th is in to Equat ion ( 2 . 2 0 ) w e obta in
(2 .22 )
17
-
8/2/2019 Lunar Gravity Simulator
31/145
Because of the fact thatn is increasedin the outer oi lsduring heat reahent, the negator unitas a different forceversus extension characteristic when backwound. It isnecessary to substitute 1 = for L-1 in the first term inbrackets in Equation2.22)
I 1 (2.23)
One possible way to achieve adjustabilityf the back-to-back negator arrangement would be toary the diameter of thedrums on which the coils are wrapped. It would be desirableto havean analytical expression o r the -We have
aFaR *
2 1F = E 1 [-- - . .RnR R~
Differentiating with respect to
aF - -2 2aR IC-* tRnR
(2.24)
(2.25)
This equation an be written in different way. If we makethe substitutions;
18
-
8/2/2019 Lunar Gravity Simulator
32/145
Rn,R = I = - t 3
12
(2.26)
(2.27)
we have
and using- SfRn- - r (r-1) .F Ew 3 2aR 6 f
(2.28)
( 2 . 2 9 )
We now have simple approximate formula forFaRComputer programs utilizing the above equations were developedin order to getrapid and accurate theoretical force versusextension characteristic forany different coils.
The force vs. extension characteristics were determinedexperimentally for three 2500 cycle fatigue life stock negatorcoil units each with two coils mounted back-to-back. Theresults are plotted in Figures.4 thru 2.6, together with thepredicted force characteristics. The predicted force is higherthan the experimentally observed forcen every case. Thereis a corresponding decreasen the difference between the value
.*.
.d The negator coilumbers refer to code usedy theHunter Spring Company; Hatfield, Pa.
19
-
8/2/2019 Lunar Gravity Simulator
33/145
30
2 0
10
0
Figure 2 . 4 - - Fo rce C h a rac t e r i s t i c sOf H16P38 Negator Coil
F o r c e (lb.
----Ht6P38 Back-To-Back
Ex ac t Th eo ry10 P e r C e nt L e ss
Ex p e r im en ta l ; R. = 1 - 5 0A Ex p e r im en ta l ; R. = 0;9010
1013b 40~ ~ ~. .. Extension (in. )
20
-
8/2/2019 Lunar Gravity Simulator
34/145
40
30
20
0
Figure 2.5 - - Force C haracterist icsOf H20R47 Negator Coi l
Force (lb.
1.475
\- -H20R47 Back-To-Back
Exact Theory10 P er Cent Less
xperimental; R. = 0.875A E x p e rimental; R. = 1.475
10
- 1010 20 3b 40 5bExtension (in. )
2 1
-
8/2/2019 Lunar Gravity Simulator
35/145
60
F0rCe
lb .50lb .
40
30
Figure 2 .6 - - F o r c e C h a r a c t e r i s t i c sOf H25S48 Negator Coil
A
H25S48 Bac k-T o Bac k-Exact Theory 0 pe r c e n t Le ss0 xper imenta l(R. = 1.09)A (Rio = 1.89)10
10 20 30 ~ 4r0- ~~~Extension, n.22
-
8/2/2019 Lunar Gravity Simulator
36/145
of the force at the high and low values of Rio. There areseveral reasons for this discrepancy. Because the negatorcoils are mounted on ru ms which are a finite distance apart,the coils cannot be straightened completely during forcemeasurement. The model on wh5ch the force derivation is basedassmed that the coils were perfectly straight after leaving thedrums. Quantitative evaluation f this effect is very difficult,and is further complicated by the fact that the distance betweenthe drums on which the coils are mounted can vary dependingon the diameter of thenrms. This is because the force mea-surements were taken using adjustablerums (see section.2).
The curves on the graphsf Figures 2.4 - 2.6 labeled"10% less" represent force that is0% less than the derivedforce labeled "exact theory.' Votta"*'as derived theoreticalforce for negator coils which is approximately0% less that therepresented by equation.19:
2F = EIC - - - 1RnR R~The force expression Votta derived is given by
and since 1-r = 0.3; l-,,' = 0.9 and therefore this force isapproximately 10% less than the correct theoretical value.
Another possible reasonor the discrepancy between thetheoretical and experimental forces is the fact that the coilsare sold w i t h a force specification of10%. The force is
23
-
8/2/2019 Lunar Gravity Simulator
37/145
strong function of thickmess (t 1 so a small variation in thicknesscould resultn large variationsn force.
3
At any rate equation.19 can be used for design purposeif one recognized the fact that actual force willr o ~ l ye lower.If the negator units are designed to be adjustable, it becomunnecessary to haven exact expression for the force.
When the negator coils are backwound the force outputbecomes almost constant. Figure .7 shows the force characteristicsof a typical back-to-back negator unit that is backwound togethewith the same coils frontwound. It can be seen that the backwouncoils exhibit "flatter" force vs. extension curve.
2.1.2 Torque-MotorIn this section the equations describing the torque outpu
of the "Torque-Motor" configuration will be derived. The configu-ration to be studied is shown in the following skctch
24
-
8/2/2019 Lunar Gravity Simulator
38/145
Figure 2 . 7 - - Force Charac ter i s t icsOf Frontwound-Backwound Negator Coil
30 -D lH*- v-q--Q - -H20R47 - 2 Coils-V-Qn/ -v F r ontw ound
2 l
-- ackwound0 Frontwound Drum Dia. = 3.25 in .A Backwound I t - I tIJ Frontwound = 1 . 75 in,VBackwound I I - I I
i-20 I0 I I10 20Extension (in. ) I30 140
-
8/2/2019 Lunar Gravity Simulator
39/145
The coil on drm (1) is in a relaxed state. A torque, T,is developed onrum ( 2 ) as the coil is pulled straightthrough zone d and then wrapped countero its relaxedcurvature on drum ( 2 ) . TO get a force output 3rdcould be attached torum (21, and an output cableoundon the rd drum.
The energy A5 , of a short length f coil A 1 , ondrum (1)can be expresseds
( 2 . 3 2 )
The corresponding energyA C 2 , of a short lengthf coilA 1 . Wrapped on rum ( 2 ) can be written:
A -2 n ( 2 . 3 3 )The change n energy, A E , as a short length f coil A 1passes f r o m d r u m (1) to drum ( 2 ) is
This change in energy can also be written as:A f = T A O R21
Letting A + d( 2 . 3 6 )
(2 .37)
26
-
8/2/2019 Lunar Gravity Simulator
40/145
%2L["-+-(-+-)]1 2 1 1d l 2 R$ R Rn R 2 R1and using (2 .37 )
T = - 2
Vottaerived a similar expression;181
E1R2 1- 4-12Rn R2T = -2 ( 2 .4 0 )by assuming that Rn R1. It canbeseen t h a t Equation( 2 . 3 9 ) w i l l reduce t o ( 2 . 4 0 ) i f R1 Rn. So t h a t R2 can ber e l a t e d t o R1, it i s necessary to f i nd d as a function of
We have:
1
27
-
8/2/2019 Lunar Gravity Simulator
41/145
We can see inmediately that
d t (R1 + R2) = q .2 2 (2.41)Also, if we denote the length of coil wrappedr m (2) by 1and the total coil length by, we can write:
R2 CR;O t
R1 = [ tThe resulting equationsreplaced by constant
t 1 p 2 (2.42)Tr
3L-1-d 1will be greatly simplified if is
1/ (2.43)
dC . Let:2 2 1/2dc Cq - (Rlo + R20> I (2.44)
Now the Torque equation (2.39) can be usedf (2.421, (2.431,and (2.44) are substitutedo r R2, R1, and d.
A fortran computer program was written which used thederived equations to give the output Torque,, as a functionof the number of turnsf drum (2). It may be desirable tohave a number of take-uprums (11,and so the computerprogram was written to allow for this.
Computer runs were made fornmber of stock "Torque-Motor" coils; utilizing single and multiple take-uprums.The torque output is plotted versus number of output diametin Figure 2.8 for a typical "Torque-Motor". It is desirable
28
-
8/2/2019 Lunar Gravity Simulator
42/145
Torque /Initial TorqueNumber ofT a k e - u p D r u m s
Numbe r of T u r n s of Output DrumF igur e 2 . 8 - - Tor que C ha r a c te r i s t i c s of Torque-Motor
29
-
8/2/2019 Lunar Gravity Simulator
43/145
to have the torque constant. t can be seen that s moretake-up dmrms are added to increaseorque the torque versusturns characteristic departs furtherr o m a constant value.Because of this the torque motororm of negator not consideredfurther. It was decided that simple negatoroils mountedback-to-back would provide mre nearly constant force through-out their extensionange.
30
-
8/2/2019 Lunar Gravity Simulator
44/145
2.2 Fatigue Life Characteristics
2.2.1 Force-to-weight ratioOne of thest impartant factors affecting the design
of the negator units is the fatigue life of the negatoroils.The negator coilsre highly stressed in order to producea relatively high force-to-weight ratio,nd consequently, they
can suffer from very short fatigue lives. Theaximum tensilestress in a negator coil when pulled straight is given by;
0 - E t" -max 2 Rna function of t/Rn which is called the stress factor (Sf).One can therefore generate plot of Sf versus rated fatigue
life. Such a curve is shown on the graph of Figure.9. Nowsince the axjmum force available r o m a negator coil is givenbY
E a 32R:max
-"and the weight of the coil is given by
weight = pwwtL
(2.45)
(2.46)
The weight/force ratio is
31
-
8/2/2019 Lunar Gravity Simulator
45/145
WN
Stress Facto r (Sf = t /R n )A 301/302 Stainless0 095 Carbon Steel
-0.02
-0 .01
1o3
Figure 2 .9 - - S t ress F ac to r -Fatigue Life Relationship
Cycles of Life(Rated)
1o6
-
8/2/2019 Lunar Gravity Simulator
46/145
24~wL Rn >2E ( 7eight/F- =-- K"s (2.47)
We see that this ratio is an inverse function of the stressfactor squared, and sincelow weight to force ratio isdesirable, we would like to makef as large as possible.But a large stress factor means low fatigue life. Since
, if we chose length, L, K will be function24P&K = - - Eof the material only; and we can makeplot of weight toforce ratio versus fatigue life forgiven L . Such a plotis shownin Figure 2.10 for two negator coil materials,095carbon steel and 301/202 stainless steel. It 2s evidentthat a design trade-off will have to be made between fatiguelife and force per unit weight.
2.2.2 AdjustabilityThe relationship between fatigue life and "adjustability"
of negator coils should also be considered.y "adjustability"is meant the changen force for a change in drum diameter or-E. This Equation (2.251 has already been derived:
x-F - 2EI [ T - -l lR R,R~ (2.25)
33
-
8/2/2019 Lunar Gravity Simulator
47/145
Q 1095 CarbonSteel
301/302 Stainless Steel
Weight/Force X Length ( f t . - l )
- 0.04
- 0.03
- 0.02- 0.01
Rated Fatigue Life (Cycles)i
i o3 i o 4 1'05 I1 6
Figure 2 .10 - - Functional RelationBetween Weight-To-Force Ratio AndRated Fatigue Life Of Ne gato r Coi ls
-
8/2/2019 Lunar Gravity Simulator
48/145
Subst i tut ing:
I = w t / 1 2and
r Rn/Rw e can write
but t / R n = Sf .so
It can be seen that a F / a R i s a functionof he stress f a c t o rcubed. A largevalueof a F / a R i s des ire d or good adju st-a b i l i t y ; t he r e f o r e , a large value of t h e stress f a c t o r i sneeded. But a l a rge s t ress f a c t o r means low f a t igue l i f e anda desig n rade-o ff between th e two i s indicated. Furthermore,it canbe seen t h a t a F / a R i s a function of r , namelyr (r-1). This function i s plo t ted i n Figure 2 . 1 1 .
The curve has a maximum a t a valueof r = 2 / 3 . This i san i n d i c a t i o n t h a t f o r maximum a d jus t a b i l i t y : r -nR shouldbe centered abou t the value 2/3.
3 5I
-
8/2/2019 Lunar Gravity Simulator
49/145
0.15
0 .1 0
0.05
Figure 2 . 1 1Adjustability2- r ( r - 1 )
Function
1 10 . 5 1 . 0r
36
-
8/2/2019 Lunar Gravity Simulator
50/145
A s tudy of the weight- to-force ra t i o s and ad ju st ab i l i tyof negator co i l s ind ica tes tha t co i l s of th e lowest ra ted fa t igu e-l i f e shouldbeused.Limited te s ts of the fa t igue l i f e ofnegatorc o i l s i n d i c a t e d t h a t t h e c o i l s w i l l l a s t somewhat long er thanth e i r r a te d fa t i gu e l i f e ; and , more im por tan t ly , the i r forcecharacteristics do not change with l i f e . Furthermore,should ac o i l break while i n use , it does not pose a sa fe ty hazard i f t h enegator coi ls are always mounted back-to-back. The remainingc o i l w i l l conf ine the f rac tu red co i l ' s r eco i l keeping it w e l labove the t e s t subject . I t i s therefore recommended thatnega torco i l s of th e lowest ra ted fa t igue l i f e be used w i t h the lunargravi ty s imula tor .
37
-
8/2/2019 Lunar Gravity Simulator
51/145
SIMULATOR DYNAMICSIntroduction
In this section the equations describing the dynamiccharacteristics of the lunar gravity simulator will be derived.Simple approximate equations and more exact equations whichrequire computer solution are derived. The effects of variousparameter changes are studied. The aim is to gainn under-standing of dynamic behaviop of the simulator and to discovthe main factors of design that affect dynamic performance.
3.1 Simple Approximate SolutionsLet us start with the simple system shown below:wo
negator coils mounted back-to-backn two spools with sus-pended mass.
1- moment of Inertia ofSPwt
the spool= mass density of negatorswidth of coils
= thiclaess of coilsR = Radius of spoolsL length of coil
3 8
-
8/2/2019 Lunar Gravity Simulator
52/145
Assume that t he r a d ius , R , uponwhich th e co il s are wrappedi s constant and f u r t h e r assume tha t the force output of thenegator unit i s such t ha t pe r f ec t s ta t ic simulation i s achieved:
Writing f = ma fo r h e system:
(M + 2 p ~ t ~ ) gF = (M + -- + 2 p ~ t ~ ) aR2where
I 21s + 2pwt(L-x)R .Solv ing for the acce le ra t io n ,
a = M + ~ P w ~ x ) ~FM + - 1s + 2 p w t LR2
( 3 . 4 )
Now using (3.1) ;1 M6- g c 1 ( 3 . 5 )M + - Is + 2pwtLR2We can see immediately th at pe rf ec t s t a t i c anddynamicsimu-
l a t i o n i s imposs ib le due t o t h e in e r t ia of the system repre-sented by 21s/R2 and 2 p w t L .
':For t h i s s imple ana lys is , L u n a r gravi ty w i l l be assumed equalt o g , which i s veryc lose o he r ueva lue .
39
-
8/2/2019 Lunar Gravity Simulator
53/145
Fmm Equation (3.51, we can see that the accelerationapproaches lunar acceleration as the inertia of thepool andthe negator approach zero.
Or if we let the static force outputf the negator be;5 1 1 21sF = -Mg t 2p~t~gM g - --6 6 n 6R 2 g (3.6)
where M = 2 p w t Lnthen the acceleration will be:
1 MtM, + 21s/R2 1a = $C 1 = 3 . ( 3 . 7 )MtM, + 21s/R2
This results in perfect dynamic simulation, but now the staticforce will be off y an amount
7 21OF
Therefore, forkeep the ratio
(3 . 8 )
good simualtion, it would be advantageous toAF/F as small as possible.
40
-
8/2/2019 Lunar Gravity Simulator
54/145
3.2 One-Dimensional Simulator Dynamics" ~ " I~. ~I n t h i s s e c t i o n a more accurate mathematical model w i l l
be formulated t o d es cr ib e th e dynamic beha vior of the simu-la to r . The analy sis w i l l be l im i t e d to a consideration of t h emotion for a jump st ra ig h t up. The system t o be consideredis shown in the following sketch:
Themethod of Lagrange w i l l be used t o analyze theabove system: W can write the k in e t ic energyof the spoolsas :
Ts = Iw1 2where I 21 + 21cS
( 3 . 9 )
(3.10)
I moment of iner t ia of one spoolS
4 1
-
8/2/2019 Lunar Gravity Simulator
55/145
IC = moment of in ert ia of t he co il ed p or tio n ofthe nega tor co i l .
I C = r d m r = (Ro + -t 1 ) 1 / 2Tr
L-x n(R o + r)l pwtdl pwtRo(L-x) +e L-x) 2IC =0
and since w = k / r , w e have:(3 .11)
The kinetic energy of the extended portion of the nega tor co i l scan be written:
T = p w I x k .n
(3.13)
The kinetic energy of t h e mass i s : T -MA . ( 3 . 14 )2m 2The g ene rali zed orc e Q, can be written:
Q (2~wtx.tM)g-F . (3.15)The to ta l ki n et ic energy of the system i s :
42
-
8/2/2019 Lunar Gravity Simulator
56/145
Lagranges equation i s :
Different ia t ing (3.16) with respect t o 2:
+ 2p& +
(3.17)
(3.18)
(3.19)
43
-
8/2/2019 Lunar Gravity Simulator
57/145
-
8/2/2019 Lunar Gravity Simulator
58/145
2 . E
2 . (
1 . 5
1 .0
0.5
0
Height (ft. )
Simula or J u m p
Ac c ele ration~ ~ .~ .
Simula torAcce le ra t ion
T i m e ( se c . )
Figure 3.1 - - TypicalOne-Dimensional Jump
(K22U36 - Rio= 1.54)
- 5 . 5
- 5 . 0
c4.
Acce le ra t ion(ft. / s e c . 2,
45
-
8/2/2019 Lunar Gravity Simulator
59/145
A s the rated fatigue lifef a negator coil increases,the force to weight ratio decreases.o determine quanti-tatively the effects of using negator coilsf differentfatigue lives several computeruns were made. The results ofthese runs are shown in Figure.2, together with lunarjump. It can be seeny observing the trend + 5 that aslonger fatigue lives are demanded, the simulation tends to worse. The jumper" overshoots by more and more as theweight of the negator coils increases. This is reasonablebecause the moving parts of the system now have more inerand thence more energy atgiven initial velocity.
46
-
8/2/2019 Lunar Gravity Simulator
60/145
3.0-
2.5.
2.0.
1.5-
1.0'
0.5-
Height (ft.1 - Lunar Jump2 - 2500 Cycle Negators3 - 5000 ' ' ' I 14 - 10,000 I 15 - 100,000 'I 11
\ITime ( s ec . )
47
-
8/2/2019 Lunar Gravity Simulator
61/145
3 . 3 Tho-Dimensional Simulator Dynamics
In this section the dynamic behaviorf the simulatoris investigated. The model used to represent the simulatoris shownin Figure Al in lappendix4. The analysis f thismodel was completedby Millett) in an earlier report. *andis included in the appendix. The equations that resultedfrom this analysis were very complex and requirednumericalcomputer solution. A computer program utilizing the methodof Milnec121was developed to solve these equations. Theoutput of this program gives the trajectory ofman in thesimulator with given initial conditions.typical trajectoryis shown n Figure 3.3 together with lunar trajectory withthe same initial conditions. The motionf the overhead airpad is also shown lagging behind the subject at first andthen catching upnd passing him near the endf the jump.
The effect f using negator coilsf greater and greaterfatigue life was investigated. Computeruns were made usingcoils ranging from 2500 cycle rated life to00,000 cyclerated life. The resulting trajectoriesor the 2500 cycleand 100,000 cycle negator coils are shown in Figure.4together with the trajectory forlunar jump. The trajector-ies fo r the 2500 nd 100,000 cycle negators o not appear tovary appreciably in this plot, but the graph is somewhat
48
-
8/2/2019 Lunar Gravity Simulator
62/145
Distance ( f t . )Figure 3 . 3 - - Two-Dimensional Dynamic Ju mp Showing Ai r Pad Motion
-
8/2/2019 Lunar Gravity Simulator
63/145
cn0
3eight ( f t . )-2.5
-2.0
-1.5
-1.0
2500 Cycle
F i g u r e 3 . 4 - - Dynamic Effects OfUsing Di f fe ren t Fa t igue Life Coi ls
Distance (ft.3 4 5 6 7 8I I I I 1 I 1 I
-
8/2/2019 Lunar Gravity Simulator
64/145
misleading in that time is not included. The subject using100,000 cycle coils willall far behind in time compared tothe subject using 2500 cycle coils.n indication of this canbe seen by observing the time trajectories as shownnFigure 3.2.
The effectf bcreasing the overhead weight (air padplus negator housing) was also investigated. For the investi-gation only the weight of the air pad was varied. The negatorhousing weight was made negligibleo as not to affect theresults. Computer runs were made for increasing air padweight. The results are plottedn Figure 3.5. It is apparantthat as the air pad weight is increased the ''jumper'' beginsto fall farther and farther behind the lunar jump trajectory.Figure 3.5 gives a quantitive measurement of this effect. Inthis Figure, the mass of the air pad is given aspercentageof the mass of the subject.
51
-
8/2/2019 Lunar Gravity Simulator
65/145
Height ( f t .
Figure 3.5 - - Dynamic Effects OfIncreasing Overhead Weight
-
8/2/2019 Lunar Gravity Simulator
66/145
NEGATOR UNIT DESIGNIntroduction
The preceding sections indicate that theain factorsto be consideredn designing the negator unitsre as follows:
1) The force output of the negator coils is notconstant but normally hasslightly positiveforce-extension gradient.2 ) The weight of the negator coils and housingshould be minimum for good dynamic performance.
In addition, it would be desirable to have negator unitswhich are continuously adjustable, at least overlimitedrange. It has already been shown that the above consider-ations indicate that negator coils of the lowest rated fatiguelife should be used forwo reasons:
1) Coils with the lowest rated fatigue life have thelowest weight-to-force ratios (see Figure.10).2 ) Best adjustability is achieved with the lowestrated fatigue life coils.In this section various design techniques are discussed,
and an optimum designf an adjustable negator unit usingtwo negator coils mounted back-to-back is considered.
53
-
8/2/2019 Lunar Gravity Simulator
67/145
4.1 Desim Techniaues
Negator springs are desirable for this applicationbecause of their relatively high force output andow weight.While the negators have been described as constant forcespring elements, it has beenhown that the force output ofa negator coil ordinarily hasslight positive force-deflection gradient. There are several ways to deal withthis problem.
4.1.1 Width alterationOne method of producingconstant force negator spring
unit involves altering the width of the negator spring coil.31The force output ofnegator coil is function of the coildimensions and the extension of the springand. The functionalrelationship can thus be written:
F = F(w,x) x extensionw = widthThe form of this equations laown and can be written:
Both fl(w) and f2(x) can be determined by analysisnd ex-periment. Once this is done the width can be altered inuch
54
-
8/2/2019 Lunar Gravity Simulator
68/145
a way so as to make:fl(w) - f2(x) = constant = Fc .
Analysis of the negator coil yields the following relations:
f (w) K1w where % = constant1
therefore:FCw = ~~
In practive it would probably be easier to determine f2(x)experimentally. Experiment indicates that f2(x) is linearfunction of x as a good approximation. This means that thewidth should vary linearly from one end of the coil to theother.
4.1.2 Backwound coilsAnother method of producingmore nearly constant
force using negator coils involves backwinding them. Analysisand experiment indicate that the force characteristicsfnegator coils when backwound are markedly different from thefrontwound characteristics, (see Figure 2.7). The forceoutput tends toecome more nearly constant throughout the
55
-
8/2/2019 Lunar Gravity Simulator
69/145
extension range. Some negator coils demonstratenegativeforce-extension gradient when backwound. Therefore, whenwosuch coils are mounted back-to-back, one backwound and onfmntwound, the total force output tends to be constantthroughout the extension range.
4.1.3 Adjustment
It would be highly desirable to have constant forceunits that are adjustable. The variations in weights ofhuman subjects will probably be significant, but if enoughadjustability could be built into the negator spring units,one set might sufficeor subjects with wide rangefdifferent weights.
One method of achieveing this adjustability involveskeeping a large rider of negator coilsn hand with differ-ent force ratings to accommodaterange of test subjectweights
Another possible ay of achieving adjustability wouldbe to vary the diameter on which the negator coil is woThis could be accomplishedy mounting the negator coilsback-to-back on opposing conical rms. This type of designis considered in detail in the following section.
56
-
8/2/2019 Lunar Gravity Simulator
70/145
4.2 Optimum Conical rum DesignFor a back-to-back adjustable negator unit design,
one like that shownn Figure 4.1 is proposed. In thissection the stressesndwill be determined.
Consider a lengthat a certain radius R ,
failure modes of the conical unit
of negator coil heldn equilibriumby a uniform internal pressure,
The strain energy containedn the coil is given by:M ~ Lh - 2EI
Substituting 1 1M E1 i- - E) .RnWe get
Now considering theork done by the pressure:RE = 2rwPRdR
(4.1)
( 4 . 2 )
(4.4)Rn
57
-
8/2/2019 Lunar Gravity Simulator
71/145
D ru m s Move In And Out\\ , /N;gator Coil
Fi gur e 4.1 - Adjustable ConicalDrum Negator U n i t Design
-
8/2/2019 Lunar Gravity Simulator
72/145
or:-dRE = 2mwPR .
Dif fe ren t ia t ing ( 4 . 3 )
dE - E I L (K E)-1 1dR" n R2se t t ing (4.6) equal t o (4 .5 ) w e have
E I L 1 1p = -3 ( " - 12.rrwRJ Rn R
(4.5)
' , (4 .6 )
(4 .7)
Now, i f instead of a uniform p res sur e the re i s a force perunit length ( f ) act ing on each edge of th e co i l , th is fo rc eper un i t length is given by
f = -w2So w e have
E I L 1 14mR Rnf ( - - z> .
Consider now th e fo ll ow in g si tu at io n
(4.8)
( 4 . 9 )
59
-
8/2/2019 Lunar Gravity Simulator
73/145
If the frictionalorce is negligible,nly the normalforce, f' , can act to produce the component,. The component,f" , will also be produced. F'rom geometry:
f' = f/sin(a)4.10)f" = f ctn(a) (4.11)
There is n addition to the wrapping forceforce producedby the pull of the negator coils. This equationfor twocoils) has already been derived:
2 1RnR 2'= EIC - -The force acting on one conical section will be
F = - = -E I 2 1c 4 4 RnR-"
(4.12)
(4.13)
The stresses acting on the spokes will be considered first.Two possible types of failure modese bending stressfailure OP compression buc.kling
Consider the forces acting at the tip ofne spoke:
$- I /p
60
-
8/2/2019 Lunar Gravity Simulator
74/145
here
P = f ' l + Fc/sin(cr)where 2 R1 = -N Ob o k at the section where the tip indicatedy the dotted line:
h/ osLThe bending moment will be given by:
M = P x (4.16)The moment f inertia of the section can be approximated by:
The maximum stress is given by:
O m l - 21- % .Substituting (4.16) and the equation;
y = q/cos(cr>+x tan(cr>
(4.18)
(4.19)
61
-
8/2/2019 Lunar Gravity Simulator
75/145
we get
To find the point of greatest stress it is necessary to tathe derivative f (4.20):
(4.21)Setting (4.21) equal to zero results in:
x =9.Sin( a > (4.22)Substituting into (4.20) results in
The shear stress at the tip is given by
(4.24)
Taking the ratiof maximum fiber stress toaximm shearstress, we get
If tan(a1 = 1 / 2 j . -/T 6which means thathe f iber st ress will be greater by factorof 6.
6 2
-
8/2/2019 Lunar Gravity Simulator
76/145
The maximum bending stress a t the far end o f the spokei s given by:
Mhm2 21(3 = -where M P'R
(4.26)
(4 .27)
I=--h312Substitution of (4.27-4.29) in to (4.26) results in
6P'Rm2h2(5 = -
(4.29)
(4.30)The compressive bucklingf the spoke mustlso be considered.The buckling modelo be used is shown below
Yor t h l s case ~IT'E~IP;& - L2 (4.31)
63
-
8/2/2019 Lunar Gravity Simulator
77/145
for the spoke
12L = Rprr fl + FC
so we have
(4 .35)c
Next, the loadingf the conical section is to be considered.It will sufficeo consider one section between two spokesas shown below
64
-
8/2/2019 Lunar Gravity Simulator
78/145
A n exact model for this section would be too complicated,ofo r purposes of maximum stress calculation, the section isrepresented by straight rectangular beam as shown below:
If it is assumed that the total distributed load is concen-trated as point loadP" at the centerf the beam; themaximum stress will be given by
(4 .36)
Where PI' is given byP" f'l + Fc/sin(a) . (4 .37)
This model does not fit the actual situation very well but itdoes generate parametric equation 4.36) which can be usedfor design purposes.
For the design of the spoked conical section, theparameters that must be chosenre the cone angle,L thespoke width, b, and width f the conical section, m. Thelargest radius, , is chosen to meet the desired force require-ments of the negator unit.
6 5
-
8/2/2019 Lunar Gravity Simulator
79/145
The purposed procedure is to determinef r o m theforce requirements, choose1 somewhat arbitrarily, and thendetermine the physical dimension of the conical section bya consideration of the forces and stresses.
A material and suitable working stress must be chosen.In addition, the buckling load must be kept below the cribuckling load by some factor,.
In summary, then, after the working stress, ow, and thebuckling load factor, , have been chosen we have the follow-ing equations for determining h,b,m, and q.
3P cos(a>= u tan(a:>W2 6P'Rbh -u
W3 3L'(fl + Fc)h b =
27rR1 = -N
(4.38)
(4.39)
(4.40)
(4.42)
(4.43)
f=-[--IL 1 147rR3 Rn d (4.44)
66
-
8/2/2019 Lunar Gravity Simulator
80/145
A computer program which used the above equationsaswritten to provide rapid and accurate design data.s theequations stand there may beore than one constraint onsome of the dimensions,o the computer program was writtento choose the dimension which resultsn a lower stress.The progm was written o that it automatically chooses thevalues of the cone angle and spoke nunber which resultn anoptimum force-to-weight ratio. copy of the program sincluded in appendix.
Using the developed program, the conical spoked sectionwas optimized with respect to force-to-weight ratio.or agiven materialnd working stress, this can be accomplishedby varying the cone angle and the nwiberf spokes untilmaximum force-to-weight ratio is realized.
Two negator units usingwo different stock negatorcoils were optimizedn order to demonstrate the feasibilityof the procedure. Both units usewo coils mounted back-to-back on adjustable conicals . Coil number SH31U58 waschosen because the force prcduced is approximately the forcenecessary to negate the torso weightf an averagean. Theother coil (SL31U69) was chosen because the negator materialhas the same width and thichess as SH31U58. SH31U58 isa2500 cycle fatigue life coil and SH31U69s a 20,000 cyclecoil.
67
-
8/2/2019 Lunar Gravity Simulator
81/145
Figures 4.2-4.5 represent the results of applyingthe computer design procedure to the abovewo coils. Theresults are always plotted versus the working stress becausthe stress may vary widely depending on the particular alloythat is used.
The curves n Figure 4.2 show the force-to-weightratios that can be obtained usingdifferent materials witha buckling factor, B , of 0.5. These represent the optimumforce-to-weight ratios that are attainable usingwo SH31U58coils mounted back-to-back. Figure 4.3 shows how the optimumcone angle and optimum numberf spokes varies with the valueof working stress chosen. For the range of working stress fothese 3 materials the optimum number of spokes variesromonly 6 to 8. The optimum angle, however, isstrong functionof the working stress value.
Figures 4.4 and 4.5 show corresponding curves for the20,000 cycle fatigue life coil (SL31U69). The force-tn-weight ratios attainable are much lower than with the500cycle coils, owing largely to the fact that the0,000 cyclecoils are not as highly stressed and therefore havelowerinherent force-to-weight ratio(see Figure.10),
68
-
8/2/2019 Lunar Gravity Simulator
82/145
3 5
30
f o r c etoweightr a t i o
25
20
16
m a g n e s i u m
aluminum
F i g u r e 4 . 2 - - O p t i m u mF o r c e - T o - W e i g h t R a t i o s/ F o r SH31U58 Co i ls Back -To-Back (2500 cyc le ; p = 1 / 2 )
10 1 0 20 30 4-. ~~ ~ -I I 3 510 6bwor k ing s t r e s s ( in p s i x 10 )69
-
8/2/2019 Lunar Gravity Simulator
83/145
40
angle( w .
35
3 0
2 5
Figu re 4 .3Optimum Curves - SH31U58Coil (2500 cycle , p = 1 / 2 )
Ispokes87
I \magnesiumL
5 1
3w0rkin.g stress ( in ps i x 10 )
70
-
8/2/2019 Lunar Gravity Simulator
84/145
-9 --8 --
7 --
6 --
5 -
4 --3 --
2 -
Force-To-Weight Rat ioorce-To-Weight Rat io
Magnesium-
: f iluminum
. I ~~ ~ ~ I I b5 10 20 30 40 60 705 0 3Working s t r e s s (in p s i x 10 )
71
F igur e 4 .4 - - OptimumForce-To-Weight Rat iosF o r SL31U69(20, 00 cycle; = 1 / 2 )
Working s t re
71
-1" ~~ ~ I I b40s s (in p s i x 10 )0 3 60 70
-
8/2/2019 Lunar Gravity Simulator
85/145
40
35
30
Angle(deg
2 5
Fig u re 4.5Optimum C u r v e s F o r
SL31U69 Coil(20, 000 cycle; p = 1/Z)
Magnesium
S poke
8 -
7 -6 .
4 -
I I r10 20 310 410 40, 6'0 70Working s t r e s s (in psi x 1O J )
72
-
8/2/2019 Lunar Gravity Simulator
86/145
Figures-4.3 nd 4.5 give the optimum valuesf cone angle andnumber of spokes as function of the working stress value thatschosen. The top portion of the graph gives the optimum numberfspokes and theottom portion the optimum cone angle fordifferentmaterials. For example, if we desire to use steel stressed to30,000 psi as the materialor designing a negator unit withwoSH31U58 coils (Figure .31, we proceed as follows:
1) Find 30,000 psi on the horizontal axis.2) Move vertically till the optimum angle curve for steel
is reached and read 28O on the lefts the optimmangle.
3 ) Continue vertically till theptimum spoke curve forsteel is reached and readspokes on the right.
Computer runs for several other stock 2500 cycle negatorcoils were made (usingESIO, appendix B). The results indicatethat the optimum numberf spokes is almost invariablyo r 7 andthe optimum cone angle almost always falls somewhere between5 and30 degrees (the angle is constrained to be between5 and 40 degrees).Furthermore, the force-to-weight ratio is notstrong functionfN or c1 near the optimum. It is therefore reconmended that negatorunits using 2500 cycle negator coils be designed withspokes andany convenient angle between 25nd 3 0 degrees.
73
-
8/2/2019 Lunar Gravity Simulator
87/145
HARNESS DESIGN
In the following section s analyses of various suspensio nsystems for limbs and torso are presented. For purposesofsuspension and ne ga tio n, th e body i s div ided in to 3 sect ions:1) l egs , 2 ) arms, and 3) torso and head.
5 . 1 C a b l e Suspension Analysis
There are two proposed methods f o r ne gat ing the tor so:1) 4-point to rs o suspension2 ) "L-C" brace orso u spension
The to r s o would be he ld more or less r i g i d i n a harness whichcons is t s o f a bicycle- l ike seat wi th s tr ap s to and aroundthe shoulders , and also includes a f iber-glass molded shellt o suppor t the f ron t o f the to r so .
It i s observed that w h i l e the cen te r of g rav i ty of thehumanbody varies appreciably during n o m 1 bodymovementsa l a rge pa r t o f th is va r ia t ion occurs as a r e su l t o f l e g andarm movements. C 1 3 1 ~ i l ehe r e i s no r e l i a b le da ta to suppor tt h i s assumption, it i s a l s o f e l t t ha t t he c e n t e r o f g r a vi tyof th e to rs o and head combination changes very l i t t l e overa wide rangeof movements. Thisassumption, i f t rue , eadsto th e c onc lus ion tha t t he torso can be ef fe ct iv el y negatedand supported by considering it a r igid body with a f ixedcenter of mass.
74
-
8/2/2019 Lunar Gravity Simulator
88/145
5.1.1 4-point torso suspensionThe 4-pint torso suspension ystem includes 4 suspens-
ion pints; two on either sidef the hips, andwo just infront of the shoulders. If the centerf mass of the torso isknown, it is simple matter to size the negating force atthe various take-up points. Consider the sketch below:
2T2
Moment balance requires:T2(z2 sin(8>+y2 cos(O>> T1(zl sin(8) + yl cos(8>>.(5.1>
For equilibrium at any valuef 8 we have thewo equations:T z = T z2 2 1 1
Also fo r lunar gravity simulation:
(5 .4 )T + 2T2 = -Wt1 65.1.2 "LC" brace torso suspension
Because of the difficulty in achieving good balancew i t h the 4-point suspension systemnd because of the cable
75
-
8/2/2019 Lunar Gravity Simulator
89/145
interferenceproposed. I
problems a second torso negation system wast was felt thatf the torso were held morer
less rigid gimbaled C-brace with pivot points passingthrough the center ofass of the torso would be suitable.This "L-C" brace system is shownn Figure 1.3. There arebearing pivot points at both sides and at the rear of thesubject. The attachment pointsre adjustable in twodirections fo r fine adjustment.5.1.3 Limb suspension
In this section an analysisf limb suspension systems,is presented.
The analysis for the legs andrm is similar inasmuchas thewo extremities are imilar. For purposes of analysis,the leg is divided intowo sections: 1) upper leg and )lower leg and foot. Therm is similarly divided:) upperarm and 2 ) lower arm and hand.
The limb (either leg r arm) is then represented asshown in the following sketch.
76
-
8/2/2019 Lunar Gravity Simulator
90/145
im b + hand or foot
It i s proposed t h a t t h e whole limb be supported a t a pointbelow th e jo in t wi th a force F2.
First, he condit ion for perfec t s imula t io n must beestablished. The limb is shown in t h e arbitrary positionbelow in a lunar gravity environment.
77
-
8/2/2019 Lunar Gravity Simulator
91/145
The condition f F1 , T1, and T2 must be established. Forcebalance requires that:
Moment balance on the lower sectionf the limb requiresthat
Mment balance on the upperimb requires:
Now themb is put into earth (lg) gravity and fora start wery to simulate unar gravity by applying forceF2 to the lower section of theimb at a distance a fromthe joint n an attempt to simulateunar gravity, as shownin the following sketch:
78
-
8/2/2019 Lunar Gravity Simulator
92/145
". ..
We can write:Force balance on upper section:
F1 Mlg + f2 .Moment balance:
T1 = M1 1l sin(el)+T2+f2Llsin(e1) .For the lower section:Force balance:
f2 = M2g - F2Moment balance:
T + F2a sin(02)=M2g12sin(92) .Rewiting Equation5 .W 1
T2 = (M2g12-F2a) sin(e2>
C 5 . W
(5.6b)
(5.6~)
(5.6d)
79
-
8/2/2019 Lunar Gravity Simulator
93/145
in order t o s a t i s f y (5.6b):M gl -F a = "M gl2 2 2 2 2
orF a = "M gl2 6 2 2 (5.7a)
substituting (5.6~) n t o (5.6a) and (5.6b) w e have:
F M g + M2g-F21 1 (5.6a)and
f o r (5.5a) t o be s a t i s f i e d :1(MI + M2)g-F2 c(M1+ M2)g
or5F2 = $M1 + M2)g . (5.7b)
We now check o see i f T1 i s s a t i s f i e d
Comparison w i t h Equation (5.5~) n d i c a t e s t h a t t h e only way(5.5~) an be sa t i s f i e d is i f :
-1 = 1 -456 1 1 6 1
80
-
8/2/2019 Lunar Gravity Simulator
94/145
or
L1 = 11 'This is physically impossibleo we conclude that this typefsupport is not suitable without some modification. One way toaccomplish the simulation would be to add another attachmentpoint above the joint, but, to avoid this complication, let usinstead negate some fractiona > of the weightf the uppersection of theimb at the upper joint. We now have thefollowing situation.
M2gThe reaction force at the upper joint is showns two forcesF1 t F3 to clarify the simulation technique.We can now write:
For the upper section:Force Balance:
F1 + F3 Mlg + f2 (5.8a)
81
-
8/2/2019 Lunar Gravity Simulator
95/145
Moment balanceT1 = M gl sin(el)+f2Llsin(e1)+T2 e (5.8b)1 1
For the lower section:Force balance:
f 2 + F2 M2g5.8~)Moment balance:
T + F2a sin(e 2> M2g12sin( 2) .2 (5.8d)We also have:
5F3 = c ~ C F MlgI . (5.8e)Solving (5.8d) and comparing it to (5.5b) resultsn thecondition:
5F2a = M2g12 . (5.9a)Substituting (5.8~) nto (5.8a) and (5.8b) yields:
F1 Mlg - F3 + M2g - F2 (5.8a)and
T1 zz M1 1l sin(B1)+(M2g-F2)L1sin(e1)+ FM,gl2Sin(e2)(5.8b)
Substituting (5.8e) into (5.8a) and comparing with (5.5a)results in
56M1 + M2)g- - aMlg-F2 = @M1 + M2)1
82
-
8/2/2019 Lunar Gravity Simulator
96/145
(5.9a)or
5 5F2 + F Mlg = $Ml + M2>g -Substituting (5.9b) nto(5.8b) results i n :T1 MlgllSin(B1)+(M2g- $M1 + M2)g+ 5 Mlg)LISin(B1)
1+ F M2g12sin(B2) . (5.8b)Comparing t h i s wi t h (5.52) r e ve a l s the c ond i t ion
1ct 1 - l/L1 * (5.9c)Equations (5 .9a , b y c ) cons t i tu te hecondi t ions on F2, t ,and a . Rei te ra t ing , w e have th en he three conditions:
3) a = M212/(M
The prec edin g anal ysis appl ies o both arms and le gs . Ther e s u l t s i n d i c a t e t h a t i f a f ra c t i on of th e upper arm o r upperle g weight i s added t o the tor so weight , th e res t of the limb'sweight can be negated by one attachment point below th e jo in t.
I t i s obvious t h a t one attachment point above t h e jo i n tcouldnever satisf y hes imula t ioncondi t ion . I t i s a l s oobvious that two suspensio n points for each limb could sa t i s fy
-
8/2/2019 Lunar Gravity Simulator
97/145
thesimulation con dit ion . One attach men tpo in t would be amuch simpler arrangement for limb negation.
84
-
8/2/2019 Lunar Gravity Simulator
98/145
5.2 Sement Weieht DeterminationIn order to achieve accurateunar gravity simulation
by negating the body components separately, it is necessaryto accurately determine the weight and locationf thecenter of ass of the body segments. Barter"ldeve1oped aset of regression equationsor calculating the weightfbody segments
both upperrms - 0.08W - 2.9 lbs.both lower arms + hands = 0.06W - 1.4 lbs.bothpperegs = 0.18W + 3.2bs.both lower legs + feet = 0.13W - 0.5 lbs.-
In the above formulasis the an's total weight. Lay andFisherCg1 report that the fractionf the body weightcontained in each body segments as follows:
Contini and
trunk and head""0.530both thighs-------.215both lower legs---0.130Drilli~[~'calculate a body build index which is
both ms---------O.125
a function of both height and weight given by:c = H/W1/3
where H height in inchesand W = weight in pounds .They present formulas whichre a function of theody buildindex for calculating the weightsf the various body segments.They have lso collected datarom other sourcesor determin-ing the location of the centers f mass of the variousody
85
-
8/2/2019 Lunar Gravity Simulator
99/145
segments. Formulas (which e a function of c) for the averagedensity of the limbs are also presented.
Most of the data n the literature is presentedstatistically; in tern of averages, standard deviations,etc. For the lunar gravity simulation work, exact data areneeded for relatively few subjects. Methods were thereforedeveloped to determine theass and centers ofass of thetorso and limbs of living human subjects.
The volumef a particular segment can be determinedby water immersion. Then if the densitys somehow h o r n themass of the limb segment can be easily found. However, itis very difficult to determine the densityf a segment of theliving body. In fact, determining both theass and centerof mass of any body segment is possible only with cadavers.But if it is assumed that the density isfunction of totalheight and weight as reportedy Contini and Drillis the segnent'smass and center f mass can be determined as follows:
1) The volume f the segment is determined by waterimmersion. "Knowing" the density the massanthen be calculated.2) The center ofass of the segmentan be foundby measuring the reaction forces onbalance
board.A modified version f the water immersion method for
finding the volumes used. The subject immerses hisimb ina tank of water and the levels noted. The limb is withdrawn
86
-
8/2/2019 Lunar Gravity Simulator
100/145
and enough water addedfromhown volume of water to bringthe level back to its original position. The volumef waternecessary to do this is the volumef the segment. Volumemeasurements a e ot made; instead the supply bucketsweighed before and after adding the necessary volumef water(see Figure .1). The segment density is estimated by usingthe following equations taken form Contini and DrillisThe equations are modified to include the handr foot with
C41
the lower r m or lower leg:c = Hw- 1/3 (3 in inches)(W in lbs.)d = 2.17~ 38.1 lb/ftdUA = 0.82bd + 13.5 lb/ft3 (upper am)dLA = 1.29d - 14.6 lb/ft3 (lower arm + hand)dUL = 0.775d + 14.2 lb/ft3 (upper legdLL = 0.912d + 12.5 lb/ft3 (lower leg foot)
3
Having an estimatef the density, it is thensimple matterto calculate the segment weight.
To determine the center of mass of theimb the subjectfirst lays flat onbalance board while the reaction force,F2, is measured and the raises theimb to some angle, ,while the reaction force,i , is again measured:
87
-
8/2/2019 Lunar Gravity Simulator
101/145
Figure 5 .1Segment Weight Determination:Arm Immers ion Tank
88
-
8/2/2019 Lunar Gravity Simulator
102/145
/' ird1 F2
(See also Figures 5.2 and.3).Moment balance yields the following equations:
IWL t w(L t 1) = F2dF d = WL + w(L + 1 cos(e>>1 12
where w weight of limbW weight of rest of body .
Solving for yields:
After the mass and locationf the centerf mass ishown for the limbs, it is easy to calculate the locationof the center f mass of the torso-head combination. The
89
-
8/2/2019 Lunar Gravity Simulator
103/145
F i g u r e 5.2Segment W eight Determination: Balance Board
90
-
8/2/2019 Lunar Gravity Simulator
104/145
-
8/2/2019 Lunar Gravity Simulator
105/145
center of mass of the total body can beound using the balanceboard. Moment balance ill yield the locationf the center fmass of the torso-head combination.
The distance f the center ofass f r o m the posteriorbody plane is difficult to determine experimentally; however,S~earingen~~~lhasrovided experimental data that can be usedto estimate this distance. He reports that the total body cenof mass is 4 inches ( '1 inch) f r o m the posterior body planeo ra standing (armsat sides) position. This data iso r normal,young, adult males. It is assumed that the centerf mass ofthe torso is about the same distancerom the posterior odyplane.
92
-
8/2/2019 Lunar Gravity Simulator
106/145
PROTOTYPE SYSTEM
6 . 1 Negator UnitsSev era l back-to-back co ni ca l d r u m adjustable negator
u n i t s we= designed and buil t . They were similar i n de s ignto those considered in sec t ion 4.2 except that they hadnospokes but were sol i d nste ad. Each con ical uni t was designedas shown i n the fo llow in g sk etch w ith the dimensions shown i nth e ta bl e below:
Design No. Coil N o . cr(deg) dmin(in) & (in )1 SH3U5 8 45 2.26 4.712 SH25U4 26.5 1.82 4.183 SH2OR47 26.5 1.47 3.754 SH16P38 26.5 1.16 3.4
Design no. 1 see Figure 6.1) i s used t o providenega t ing force for the main torso harness. (This unit i s shownin the photograph of Figure 6.1). This design produces approxi-mately 60-80 pounds of force. Design no. 2 i s used as a l e g
93
-
8/2/2019 Lunar Gravity Simulator
107/145
Figure 6 . 1 - - Prototype Back-To-BackAdjustable Conical Drum Negator Unit
(Design No. 1)
-
8/2/2019 Lunar Gravity Simulator
108/145
negator with the cable going straight up the s ide of thesubject rather than being at tached to the tors o har nes s.Two other negator units were constructed for use in negatingthe arms. These used two SHl6P38 coils whichhad theirwidth educed t o 1 / 2 inch.Theirforceoutpu t was about1 0 pounds each. All the negator units used in the prototypesimulator were equipped with safety devices t o prevent thec o i l s from coming comple tely unwound from th e drums.
9 5
-
8/2/2019 Lunar Gravity Simulator
109/145
6.2 Magnetic A i r PadsTen prototype magneticir pads were designed and
constructed using the preliminary designf reference0.Each pad usedn eight-pole permanent alnicomagnet ratedat 70 pounds and weighing .7 pounds. The pads re 4 inchesin diameter, machined from magnesium, and assembled withepoxy. The central orifice in each pad is/ 1 6 inches indiameter. When used with supply pressure of 80 psig,the pds exhibit a breakaway force of approximately5pounds. A photograph of the design is shownn Figure 6.2.
S i x of the prototype magnetic air pads arrangedn ar ing are used o support the a in torso harness; one eachis usedfor the arms and legs. Themain cluster is shownin Figure 6.3.
96
-
8/2/2019 Lunar Gravity Simulator
110/145
Figure 6 . 2 - - Magnetic Air Pad
Figure 6 . 3 - - Magnetic Air Pad Cluster97
-
8/2/2019 Lunar Gravity Simulator
111/145
6.3 Prototype HarnessThe harness used with the prototype simulator is sho
in several views in Figures 6.46.7. The subject issupported on bicycle-like seat and held firmly in placewith a foam-padded molded figerglass shell at the frontfthe torso. The bearing pivot points at the side and back
allow for forward and sideways rotation (see Figures.8 and6.9). The harness is constructed mainlyf welded squaretubular aluminm. Its total weights about 20 pounds. Theattachment points on either side of themess are adjustableto accomalate subjects of different sizes. (see Figure 6.9.
98
-
8/2/2019 Lunar Gravity Simulator
112/145
Figure 6.4 - - Prototype Harness99
-
8/2/2019 Lunar Gravity Simulator
113/145
F i g u r e 6 .5 - - Proto type Harness
100
-
8/2/2019 Lunar Gravity Simulator
114/145
Figure 6 . 6 - - Prototype Harness
101
-
8/2/2019 Lunar Gravity Simulator
115/145
Figure 6 . 7 - - Prototype Harness: Seat
102
-
8/2/2019 Lunar Gravity Simulator
116/145
Figure 6 . 8 - - Prototype Harness: Rear Bearing Pivot Point
Figure 6 . 9 - - Prototype Harness: Side Bearing Pivot Point103
-
8/2/2019 Lunar Gravity Simulator
117/145
1. Barter, J. T., "Estimation of theass of Body Sepents,"WADC Tech. Report 57-260, ASTIA Document No. 118222,April, 1957.2. Case Institute f Technology, "Prototype Studies inLunar Gravity Simulation,'' Report No.E 8-66-1,NASA Contract AS 1-4449, Cleveland, Ohio, February,1966.3. Chimnis, N.P., "New Springso More Jobs," Product
Engineering, April 1, 1966.4. Drillis, R. and Contini,., "Body Segment Parameters,"Technical Report No. 1166.03, Office of VocationalRehabilitation, Dept ofEW Contract No. R886, NewYork University, School of Engineering and Science,University Heights, Nework, September, 1966.5. Dubois, J., Gmoto, C., and Santschi,. R., "Momentsof Inertia and Centers of Gravity of the LivingumanBody," USAF Tech. Documentary Report No. AMRL-TDR-63-36,May, 1963.6. Hertzberg, H. T., Daniels, E., and Chwchill, E.,"Anthropometry of Flying Personnel," 1950,SAF, WADC,Tech. Report 2-321, 1954.7. Hewes, D.E. and Spady,. A., "Evaluation of Gravity-Simulation Techniqueo r Studies of Man's Self-Locomotion
in Lunar Envimnment," NASA-TN-D-2176, Langley ResearchCenter, Hampton Va., Mbrch, 1964.8. King, B. G., Patch, C. T.,nd Shinlanan, P. G., "The
Center of Mass of Man," ASME Paper No. 60-WA-306,SMEWinter Annual. Meeting, Nov.27Dec.2, 1964, Nework,N.Y. -9. Lay, W. E. and Fisher, L. C., "Riding Comfort and Cushions,"SOC.AUt0 Ehg.J., V01.47, N0.5, 1940, pp 482-496.
104
-
8/2/2019 Lunar Gravity Simulator
118/145
10. Millett, D. A . , ''The Design of a Magnetic A i r Bearingfor Usen a Lunar Gravity Simulator,".S. Thesis,Case Institutef Technology, Cleveland, Ohio, June,1967; also published as NASA CR-1235.11. Northrop Space Laboratories,A Study of Man's PhysicalCapabilities on the Moon,"ASA Contract No. AS1-4449, Hawthorne, California, 1966.12. Ralston, A. and Wilf,. S., Mathematical MethodsforDigital Computers,ohn Wiley and Sons, Inc., Nework,1965.13. Swearingen, J. J . , "Determination of Centers of Gravityof Man," Aeromedical Research Division, Civil AeromedicalResearch Institute, klahoma City, Oklahoma, August, 1962.14. Timoshenko, S., Strength of Materials, pt.Second Edition,D. Van Nostrand Company, Inc. Nework, 1941, p 120.15. Timoshenko, S.and CacCullough, G.., Elements of Strengthof Materials, Second Edition, D. Van Nostrand Company,Inc., New ork, 1940, p 114.16. Timoshenko, S. and WoinowsQ-Krieger, S., Theory of Plates
and Sheels, Second Edition, McGraw-Hill, Nework, 1959,pp 37-39.17. Timoshenko, S., Theory of Elastic Stability, SecondEdition, McGraw-Hill ook Co., New York, 1936.18. Votta, F. A . , Jr., "The Theory and Design of Long-DeflectionConstant-Force Spring Elements,"SME TTans., May, 1952,pp 439-450.19. Wudell, A. E. and Lewis,. A., "Comparison of LunarSimulation TechniquesI1 Martin-Marietta Corp. Report
No. "66-41, October, 1966, Denver, Colorado.
105
-
8/2/2019 Lunar Gravity Simulator
119/145
APPENDIX A
IntroductionThis appendix containsn abbreviated version f an
analysis of the dynamic behaviorf a vertical suspensiontype simulator. The system to be analysed is shown inFigure Al.
The system components consistf one magnetic air pad,a back-to-back negator spring assembly and the subjectass.The subject mass will be considered to be inanimate. Thenegator spring assembly housing is attached to the air padby a b a l l joint. If the system is confined to move inplane perpendicular to the ceiling, its position can bedefined by three generalized coordinates; namely, the positionof their pad center of gravity, the angle between theextended nagator springs and the vertical, and the distancefrom the ball joint to the subjectass. A n important assump-tion must be made, however, before these three coordinatescan correctly etermine the position of theystm. This isthat the extended portion of the negator spring does not bin the plane of motion. This is probablyvalid assumptionfor the orientation of the negator springs shown in Figurel. E
.,.. Note that the width of the negator spring is parallel toplane of motion.106
-
8/2/2019 Lunar Gravity Simulator
120/145
Side~~~ ~~~ "
1
\
Figure A1Lunar Gra vity Simulator Model
0
107
-
8/2/2019 Lunar Gravity Simulator
121/145
I f , however, t he ne ga to r sp rin g assembly w e r e rotated through90 deg ree s, the wi dth of the neg ato r spr ing s would be perpen-d ic u la r to the p la ne of motion. Due t o the very low r igidi tyof the negator spr ings in this . d irec t ion, the assmptionwouldno longer apply and t h e three coordinates would notsu f f i c e in loc ati ng the system.
The following are the assumptions which w i l l be madein the der iva tio n of the dynamic equations:
1. The extended portion of the negator spr ing i s r i g i dand inextensible.2 . The a i r padmoves wi th neg lig ibl e fr ic tio n.3 . Theup-and-down dynamics o f he a i r pad are sosmall tha t they can be neglected.4. The ball oint h a s n e g l i g i b l e f r i c t i o n .5. The a i r drag on the system i s negl ig ib le .6 . The motion of the system i s planar.7 . The negatorsprin g system has a constantforcef o r any elongation.The parameters used in t he a na lys i s are defined as
follows :XP Location of the center of grav ity of the a i r pad.9 Angle t h a t h e extended portio nof henegator pringmakes wi th the ver tic al.1 The distance f r o m t h eb a l l o i n t o h ec e n t e r o fgrav i ty of the subjec t mass.a The distance f r o m t h ec e n te r o fgravi tyof he a i r padt o t h e b a l l j o i n t .
108
-
8/2/2019 Lunar Gravity Simulator
122/145
b
rRS
WtL
h
X
YMLMPrr,MS
MeMCP
IS0IC0
ISCi
The distance fxxn h e b a l l j o i n t t o t h e c e n t e r o f g r a v i t yof the negator spring spools and housing.Radius of a negator spring spool.Radius of the coi led por t ion of negator spr ing.Width of the negator spr ing.Thickness of the neg ato r spri ng.Total length of a negator spring.The c ent er of gravi ty of the system of masses suspendedf r o m th e ba l l jo in t measured f r o m t ha t po in t .A d i s t a n c e p a r a l l e l t o any point on th e extended p e t i o nof the negator spr ing.Horizontal distance f r o m a.reference point .Vertical dis tance f r o m a reference point.Mass of the subjec t .Mass of the a i r pad.Mass of the negator spring housing.Mass of a negator spring spool containing bearings.Mass of th e extended por tion of one negato r spring .Mass of the coi led por ito n of one negator spring.The densit y of the negator spring material.Moment of inert ia of one spool about the ba l l j o in t .Moment o f i n e r t i a of t he co ile d po rti on of one negatorspr ing about the ball j o i n t .Moment of iner t ia of the negato r spring housing aboutth e ball j o i n t .Moment o f i n e r t i a of one spool about i t s a x i s of ro ta t ion .
109
-
8/2/2019 Lunar Gravity Simulator
123/145
-
8/2/2019 Lunar Gravity Simulator
124/145
Upon substitution of the squares of the componentvelocities into the above expression, the kinetic energy can
It should be noted that s a constant over theintegration which takes place at any instantf time. Inaddition must be equal to i due to physical constraint.Upn completing the integration and making the above-mentionedsubstitution, the kinetic energyf the extended portionfboth negator springs can be expressed3 follows:
Kinetic Energy f the SubjectassFor the sake f simplicity, the ass w i l l be assumed
concentrated at point. The coordinates f this point re
111
-
8/2/2019 Lunar Gravity Simulator
125/145
The kinetic energy of t h e mass can be written
Upon making the appropr ia te subs t i tu t ion s , the k ine t icenergy of the subject mass is.
Kinetic Energy of the Negator Spring HousingThe coordinates of t h e c e n t e r of gravi ty of the negator
spring housing arexh = xp + b s i r i ( 0 )yh -a -b cos(@ -
The ve loc i t i e s are
The ki ne t i c energy of th e housing can then bewrittenas
-
8/2/2019 Lunar Gravity Simulator
126/145
Th = M,(Z2+b2-2+22 b 6 c o s t e l > +1IhCgi2P P
Using th e p a ra l l e l a x i s theorem, th e moment of i n e r t i aof th e housing about th e ball j o i n t i s
Ihe = I + b2hcgSubst i tut ing this equat ion into the expression for
ki ne t i c energy yie lds the fol lowing :
Kinetic Energy of Both Negator Spring SpoolsThe coordinates of th e ce nt er of g ra vi ty of th e two-
spool combination arex x + b s i n ( e )S Pys = -a -b cos(8) .The corresponding velocities of t h i s c e n t e r of mass
arek = k + b 6 cos(f3)9, = b 6 s in (8 ) .S PThe spools rotate with an angular ve loc i ty & . This
angular ve loc i ty i s a function of both i and 1, and can be
113
-
8/2/2019 Lunar Gravity Simulator
127/145
expressed asa = -i R = JfiL + b-l)+rsR IT
where R i s thevar ia lbe ad ius of a coil. The expressionf o r R i s derived n henextsect ion .
Solving for the k ine t ic energy due to t r an s l a t io n ofthe center of mass plus that due to ro ta t i on about the centerof mass gives
2 2 i2T Ms[x + 2x b e cos (e ) l+Isee + Is xS P P C%L1 + b - l)+r: 1Kinetic Energy of the Coiled Portions of Both Negator springs-
The coordinates of the cen te r of mass of t h e c o i l arex x + b s in())C PYC -a -b cos(e) .It should be noted that thes e coo rdina tes are not a
function of the var iab le 1.The velocities of the cen te r of mass me
The kinetic energy of t h e c o i l can be expressed as
114
-
8/2/2019 Lunar Gravity Simulator
128/145
.n
The parameters Mc, Ice, nd Iac are functions of thedistance 1. It can be eas i ly seen th at th e mass of one coil i s
Mc = pwt ( L + b - 1) .The ra di us of th e co il can be found from the evaluation
of the following integral:
rS 0
Where C i s the ength of thecoilednegator springand ds i s an elementof arc length:
C = L + b - lUpnevaluation of the above in te gr al , R i s found;
Themoment of in e r t i a of one c o i l about i t s cyl indr ica laxis is
The moment of i n e r t i a of a co i l about an axis perpendi-c u l a r t o t h e a x i s of symmetry th rough the b a l l jo i n t i s
z z( R - rs) w24 12,, = m, C + - + b ] .
115
-
8/2/2019 Lunar Gravity Simulator
129/145
Making the appropriate substitutions, the kinetic energyof both coils is found.
[ t ( L + b - 1>+ rsl 12[ %L + b - 1>+ sl+ p w t ( L + b - 1)
712
IT
Kinetic Energyf the AirPad
The kinetic energyf the air pad can be simply expressebY
Kinetic Energy f the SystemThe kinetic energyf the system is the summationf
the kinetic energies of thecomponent masses:
Generalized ForcesBecause of the negligible air drag assumption, the
generalized force due to variation in x isb
116
-
8/2/2019 Lunar Gravity Simulator
130/145
Using the assunp tion s of negligib le air drag andf r i c t i o n in t h e b a l l j o i n t , t h e g e n e r a l i z e d f o r c e due t o t h evar ia t ion of e i s
Q, -g(% + % + 2M + 2M c + 2Me)D sin(e) .2 cgWhere D i s thecente r of mass of the system suspendedcg
below th e bal l jo in t .
b(2Ms+Mh)+1ML+2pwtbL+pwt(1 b ) 2D =cg ML+%+2Ms+2Mc+2Me
Q, can now be expressed as
In ca lcula t ing the genera l ized force due t o a var ia t ionin 1, the f r ic t io nal torq ue in the bear ings of one negatorspring spool i s assumed t o be of th e form
The f r ic t io nal torq ue con ta ins a viscous f r ic t ion termand a coulomb friction term. I t w i l l be assumed th at th es eare independent of the loa d app lied to the be arin g becausethe var ia t ion in the bear ing load should be small.
117
-
8/2/2019 Lunar Gravity Simulator
131/145
f = -ITRThe frictional force due to this torque can be writmaking %he substitution CL = -1R *The frictional force dueo the bearings in the pools is
1 1 lff = -2(Dm - ") .R2 lil RThe generalized force due tovariation in 1 is
Substituting the expressions fore and R into theabove equation,, i s found in terms of the generalized co-ordinates.
i2[Dml +- - (L+b-l)+rslQ1=[2pwt(l-b)+~lg cos(@)- -F
t- (L+b-l)+ rsTrDerivation of Dynamic Equations
Using the method of Lagrange, three dynamic equationswill be derived. There will be one equation for each gener-alized coordinate r degree of freedom.
The first equation of motionor the system is
118
-
8/2/2019 Lunar Gravity Simulator
132/145
Then - (-1 = o .TP
dt a?It is seen that the coordinatecan be ignored fromP
the standpoint f.the ynamics of the system. Furthermore,the above equation is immediately integrable and has theorm-T = const.
a?PSince the quantity-T is the momentum associated
a? Pwith the coordinate, , the previoys equations a statementPof conservationf momentum in the x direction.P
Carrying out the required differentiation, this equationbecomes
(M +%+2Ms+2pwtL+M ) A +( +2Ms+2pwtL)b 6 cos(e)P L P %
+2(1-b)i sin(e>] = const.
The second equationf motion for the system is
Performing the required differentiations yields:
119
-
8/2/2019 Lunar Gravity Simulator
133/145
The third equation of motionor the system s
The evaluation of this equation yields:.. 21 t pwt(L+b-l))L+b-1)+2rs1 21 2pwt(l-b)+ML+ sa 7r2 15Ltb-1) + rsIT
120
-
8/2/2019 Lunar Gravity Simulator
134/145
APPENDIX B - COMPUTER PROGRAMSIn this appendix islisting of three f o r t r a n cmputer
programs: JUMPl, DESIO, and UMP2.JUMP1 is the namef the computer program thatas
developed to solve the equations derivedn section 3.2. Theinputs to the program are asollows:
mass of subject UMlength of negatoroils ULthickness of negator coils Twidthfegatoroils Wnatural radiusf curvatureradius of dmrms that theinitial upward velocityf
of negatoroils RNOnegator coils were wrapped on RIOsub ct x20
The output f the program is the height and accelerationfthe subject at selected time intervals. The correspondinglunar height is also printed out.
DESIO is the nameo r the program that was developedto use the equations derived in Section.2. The programautomatically chooses the optimum valuesf cone angle ndspoke nunber that will result inminimum weight design. Theinputs m e as follows:
width of negatoroils wlength of negatoroils ULthickness of negator coils Tnatural radiusf curvatureminimum radius that negatorchange in radius that is
ofegatoroils RNOcoils m e rappedn R I Odesired DELR
121
-
8/2/2019 Lunar Gravity Simulator
135/145
density of material mosYoung's modulus of material ENWorkingtress SIGMAbuckling load factor (seesection 4.2) BETAThe output f the program is the cone angle and numberf spokesto be used plusll the dimensions such as spoke width, etc.These symbols are definedin section 4.2.
J U M P 2 used the equations that were derivedn AppendixA. The inputs are the same asUMP1 except that the thiclmessof the negator coil isT and the input velocities areODOTupward and XOWT sideways. UM P is the ass of the air pad.The output of therogram gives the position and accelerationin both dimensionsf the subject together with the correspond-ing positiono r a lunar ''jumper.
122
-
8/2/2019 Lunar Gravity Simulator
136/145
L.ST1231 U1112131415
1 617
c nH
123
-
8/2/2019 Lunar Gravity Simulator
137/145
124
-
8/2/2019 Lunar Gravity Simulator
138/145
125
-
8/2/2019 Lunar Gravity Simulator
139/145
126
-
8/2/2019 Lunar Gravity Simulator
140/145
F O R
134510
127
-
8/2/2019 Lunar Gravity Simulator
141/145
32.2
128
-
8/2/2019 Lunar Gravity Simulator
142/145
129
-
8/2/2019 Lunar Gravity Simulator
143/145
130
-
8/2/2019 Lunar Gravity Simulator
144/145
NASA-Langley, 1968 - CR-1234 131
-
8/2/2019 Lunar Gravity Simulator
145/145
E R O N A U T I C SND SPACE ADMINISTRATIONWASHINGTON,. C. 20546
OFFIC IAL BUSINESS FIRST