LS-DYNA
66
Introduction to LS-DYNA Nishant Jain
-
Upload
nishant-jain -
Category
Documents
-
view
348 -
download
74
Transcript of LS-DYNA

Introduction to LS-DYNA
Nishant Jain

February 2006 2CROWN Technology Confidential ©
Outline1. LS-DYNA Architecture
1. Nodes and Elements,
2. Section Properties,
3. Material Model
2. Rigid Parts
3. Boundary Conditions
4. Loading
5. Contact Definition
6. Resources
7. Example
Detail Information
*CONTROL …………………………..20
*DATABASE …………………………35
ADAPTIVITY………………………….40
MATERIAL MODELS ……………….45
*CONTACT …………………………..53

February 2006 3CROWN Technology Confidential ©
Resources
Web Siteswww.dynasupport.comwww.feainformation.comwww.metalformingsimulation.comwww.dynaexamples.com
Tutorials1. Introduction to DYNA : IntroDyna.pdf2. User’s Guide: Users_Guide.pdf3. Keywords Manual : ls-dyna_971_manual-k.pdf4. Example Manual : examples.pdf
Input Decks : ....\examples5. Sample Problems :Sample Problems.pdf
Input Decks : ....\Sample Problems6. Theory Manual :theory.pdf
Metal Forming Tutorials1. Forming Parameters : forming_parameters2.pdf2. Spring-back : springback_parameters.pdf
http://www.dynasupport.com/support/howto
http://www.dynasupport.com/support/tutorial

February 2006 4CROWN Technology Confidential ©
Description of Keyword Input
Data Block(Space Delimited)
Keyword
LS-DYNA, unlike ABAQUS, does not follow any hierarchy. So, in an input deck, boundary conditions can be defined before defining the nodes.

February 2006 5CROWN Technology Confidential ©
Keyword - Example

February 2006 6CROWN Technology Confidential ©
Nodes and ElementsNode Definition
ABAQUS*NODE** NID X Y Z 400, 2, 3, 4,
DYNA*NODE$ NID X Y Z 400 2 3 4$0123456789012345678901234567890123456789
Element Definition
ABAQUS*ELEMENT,TYPE=S4R,ELSET=Blank** EID N1 N2 N3 N4 1, 1, 2, 3, 4,*ELEMENT,TYPE=C3D8,ELSET=Blank** EID N1 N2 N3 N4 N5 N6 N7 N8 1, 1, 2, 3, 4, 5, 6, 7, 8
DYNA*ELEMENT_SHELL$ EID PID N1 N2 N3 N4 1 1 1 2 3 4*ELEMENT_SOLID$ EID PID 1 1$ N1 N2 N3 N4 N5 N6 N7 N8 1 2 3 4 5 6 7 8
ABAQUS• Type of element (shell or solid) is identified in the data line
by parameter “Type”• Element is associated to a part by its “Name”• The type of particular element within a shell or solid
element is defined in type of element.
DYNA
• Type of element (shell or solid) is identified in the keyword • Element is associated to a part by its “ID”• The type of particular element within a shell or solid
element is defined in section properties.

February 2006 7CROWN Technology Confidential ©
SectionSection Properties ABAQUS
*SHELL SECTION, ELSET=Blank, MATERIAL=CreaSteel, SECTION INTEGRATION = GAUSS** T NIP 0.17 , 7
DYNA*PART$ PID SID MID ADPOPT 1 2 1 1 *SECTION_SHELL$ SID ELFORM NIP QR 2 16 0.8333 7 0$ T1 T2 T3 T4 0.17 0.17 0.17 0.17
This specifies type of element formulation within shell or solid element (eg axisymmetric) . ABAQUS does this in element definition (S4R, S3R, SAX)
Flag to Indicate Adaptive meshing is used
ABAQUS• *SHELL SECTION defines the element set name for which the section properties are defined. • It also specifies the name of the material identifying the material properties that will be used.
DYNA• A part (collection of elements) is given a unique id using a *PART card.
This part is associated to particular section properties defined by unique idThis part is associated to particular material properties defined by unique id.
• The section properties are defined separately using *SECTION card

February 2006 8CROWN Technology Confidential ©
Material
DYNA
*MAT_3-PARAMETER_BARLAT$ MID Density E PR 1 8.0E-09 200000.0 0.3 $ R0 R45 R90 LCID 1.65 2.27 2.31 3 *DEFINE_CURVE$ LCID 3 0 1.0 1.0 0.0 0.0 0$ Strain Stress 0.00000 200.0 0.00995 227.2 0.02960 257.5
ABAQUS
*MATERIAL, NAME=CreaSteel*DENSITY8.0E-09*ELASTIC, TYPE = ISOTROPIC** E PR200000.0 ,0.3 *PLASTIC** Stress Strain 200.00 ,0.00000 227.25 ,0.00995 257.50 ,0.02960*POTENTIAL1 ,1.0587 ,1.2433 ,0.9149 ,1.0 ,1.0
ABAQUS
•Different cards are used to define different properties
DensityElasticPlasticAnisotropy
•Depending on what is required, either a card is included or excluded.
DYNA
•There are different material models which require certain parameters.•Depending on the properties to be included, different material models are used. For Example,
Only Elastic:*MAT_ELASTICPlasticity without anisotropy:*MAT_PIECEWISE_LINEAR_PLASTIC

February 2006 9CROWN Technology Confidential ©
LS-DYNA Architecture

February 2006 10CROWN Technology Confidential ©
Rigid Parts
DYNA *PART$ PID SID MID 2 1 3 *MAT_RIGID$ MID RO E PR 3 8.0E-09 200000.0 0.3 $ CMO CON1 CON2 1.0 6 7
$$Rigid body constraints in DYNA are applied through material definition using $$parameters CMO, CON1 and CON2$$CMO: Center of mass constraint$$ 1: in global direction$$ 0: no constraints$$ CON 1 $$ 0: no constraints$$ 1: constraint x displacement$$ 2: constraint y displacement$$ 3: constraint z displacement$$ 4: constraint x and y displacements$$ 5: constraint y and z displacements$$ 6: constraint z and x displacements$$ 7: constraint x, y and z displacements$$CON2: is for Rotations and follow similar pattern to CON1
ABAQUS*ELEMENT,TYPE=R3D3,ELSET=Punch 60090, 60442, 60415, 60441*NSET, NSET=Ref_Punch 30027,*BOUNDARY Ref_Punch,1, ,0.0 Ref_Punch,3,6,0.0
ABAQUS
1. The rigid properties are defined using rigid elements (R3D3, RAX...)
2. A node from the rigid element is constrained (using *BOUNDARY), to constrain the rigid part.
LS-DYNA
1. The rigid properties are defined using rigid material card (*MAT_RIGID)
2. The constraints for the rigid part are defined in the *MAT_RIGID card

February 2006 11CROWN Technology Confidential ©
Boundary ConditionsABAQUS*NSET, NSET=Ref_Punch 30027,*AMPLITUDE, NAME =Punch-Displacement, DEFINITION = TABULAR, SMOOTH = 0.50.0 ,0.0 ,0.025 ,20.0 *BOUNDARY, TYPE = DISPLACEMENT, AMPLITUDE = Punch-Displacement Ref_Punch,1, , 0.0 Ref_Punch,2, ,1.0 Ref_Punch,3,6,0.0
DYNA – Rigid Part*BOUNDARY_PRESCRIBED_MOTION_RIGID ID DOF VAD LCID SF 2 2 2 1 1.0 0 $$DOF: applicable DOF$$ 1 - x translation, 2 - y translation, 3 - z translation$$VAD: type of boundary condition$$ 0 – Velocity, 1 – Acceleration, 2 – Displacement*DEFINE_CURVE LCID SFA SFO 1 0 1.0 1.0 0.0 0.0 0 Time Multiplier 0.0 0.0 0.025 20.0
ABAQUS
1. The boundary conditions to the rigid part is given to the reference node of the rigid part.
2. Type of boundary condition (Displacement, Velocity, Acceleration) is specified using TYPE parameter.
3. The curve is defined using *AMPLITUDE card.
LS-DYNA
1. The boundary condition to the rigid part is given to the part id.
2. Type of boundary condition (Displacement, Velocity, Acceleration) depends on the value of VAD
3. The curve is defined using *DEFINE_CURVE card.DYNA – Deformable Part*BOUNDARY_SPC_NODE$ NID XT YT ZT XR YR ZR 1 0 1 1 1

February 2006 12CROWN Technology Confidential ©
Loading
DYNA*LOAD_RIGID_BODY PID DOF LCID SF 4 2 2 1.0 *DEFINE_CURVE LCID SFA SFO 2 0 1.0 1.0 0.0 0.0 0 Time Multiplier 0.0 0.0 0.005 7357.5 0.025 7357.5
ABAQUS*NSET, NSET=Ref_Clamp 60027,*AMPLITUDE, NAME =Load, DEFINITION = TABULAR0.0 ,7357.5 ,0.025 ,7357.5 *CLOAD, AMPLITUDE = Load Ref_Clamp,2,1.0
ABAQUS1. The loading condition to the rigid part is given to the reference node of the rigid part.2. Different cards used to change type of loading conditions (Concentrated force - *CLOAD; Distributed force *DLOAD)3. The curve is defined using *AMPLITUDE card.LS-DYNA1. The boundary condition to the rigid part is given to the part id.2. Different cards used to change type of loading conditions (Concentrated force - *LOAD_RIGID_BODY (For Rigid
Body) / *LOAD_NODE ; Distributed force - *LOAD_SHELL / *LOAD_SEGMENT (For Solid Element))3. The curve is defined using *DEFINE_CURVE card.

February 2006 13CROWN Technology Confidential ©
Contact
DYNA*CONTACT_FORMING_ONE_WAY_SURFACE_TO_SURFACE $ SSID MSID SSTYP MSTYP 1 2 3 3 FS FD 0.1 0.01 20.0
$ SOFT 0.0/4.0$$SSID: Slave Id (can be node set, element set, part id depends on SSTYPl)$$MSID: Master Id (can be node set, element set, part id depends on SSTYPl)$$SSTYP: For Slave, 0 - Segment Set Id$$ 1 - Shell element set Id$$ 2 - Part set Id$$ 3 - Part Id$$ .....$$MSTYP: Same as Slave $$FS: Static Coefficient of friction$$FD: Dynamic coefficient of friction
Detail Information: http://www.dynasupport.com/Support/tutorial/contact.modeling
Other Contact Definitions
*CONTACT_FORMING_SURFACE_TO_SURFACE
*CONTACT_AUTOMATIC_SINGLE_SURFACE
*CONTACT_AUTOMATIC_GENERAL

February 2006 14CROWN Technology Confidential ©
Resources
Web Siteswww.dynasupport.comwww.feainformation.comwww.metalformingsimulation.comwww.dynaexamples.com
Tutorials1. Introduction to DYNA : IntroDyna.pdf2. User’s Guide: Users_Guide.pdf3. Keywords Manual : ls-dyna_971_manual-k.pdf4. Example Manual : examples.pdf
Input Decks : ....\examples5. Sample Problems :Sample Problems.pdf
Input Decks : ....\Sample Problems6. Theory Manual :theory.pdf
Metal Forming Tutorials1. Forming Parameters : forming_parameters2.pdf2. Spring-back : springback_parameters.pdf
http://www.dynasupport.com/support/howto
http://www.dynasupport.com/support/tutorial

February 2006 15CROWN Technology Confidential ©
Example
Problem: Measure the deflection of the block, under given pressure loading

February 2006 16CROWN Technology Confidential ©
Example

February 2006 17CROWN Technology Confidential ©
Example

February 2006 18CROWN Technology Confidential ©
Example

February 2006 19CROWN Technology Confidential ©
Example

*CONTROL_

February 2006 21CROWN Technology Confidential ©
Resources
Web Siteswww.dynasupport.comwww.feainformation.comwww.metalformingsimulation.comwww.dynaexamples.com
Tutorials1. Introduction to DYNA : IntroDyna.pdf2. User’s Guide: Users_Guide.pdf3. Keywords Manual : ls-dyna_971_manual-k.pdf4. Example Manual : examples.pdf
Input Decks : ....\examples5. Sample Problems :Sample Problems.pdf
Input Decks : ....\Sample Problems6. Theory Manual :theory.pdf
Metal Forming Tutorials1. Forming Parameters : forming_parameters2.pdf2. Spring-back : springback_parameters.pdf
http://www.dynasupport.com/support/howto
http://www.dynasupport.com/support/tutorial

February 2006 22CROWN Technology Confidential ©
*CONTROL_TERMINATION
Only this parameter will be required in most cases.

February 2006 23CROWN Technology Confidential ©
*CONTROL_TIMESTEP
Used for Mass Scaling : Specify the time step
Use (-)time step to specify variable mass scaling
It is a new development in LS-DYNA where in by using this parameter the springback results are not affected by mass scaling. In my knowledge, it does not apply mass scaling to rigid elements and that somehow takes away the negative effects of mass scaling
*CONTROL_TIMESTEP
$$ DTINIT TSSFAC ISDO TSLIMT DT2MS LCTM ERODE MSIST
-8.0e-8
$$ IMSCL
-1 Here 1 refers to the part set id of deformable parts

February 2006 24CROWN Technology Confidential ©
*CONTROL_SHELL
For Thermal Analysis

February 2006 25CROWN Technology Confidential ©
*CONTROL_HOURGLASS
IHQ = 4 for Reduced Integration Shell Element (Section type “2”)
IHQ = 8 for Fully Integrated Shell Element (Section type “16”)

February 2006 26CROWN Technology Confidential ©
*CONTROL_CONTACT
There are 4 more cards which are optional and are rarely used

February 2006 27CROWN Technology Confidential ©
*CONTROL_IMPLICIT_GENERAL

February 2006 28CROWN Technology Confidential ©
*CONTROL_IMPLICIT_SOLVER
Use default values

February 2006 29CROWN Technology Confidential ©
*CONTROL_IMPLICIT_SOLUTION
There are 3 more cards which are optional
Use Default for ALL
If there is a convergence issue, use
ILIMIT = 1; MAXREF = 200 (recommended for springback)
DO NOT CHANGE DCTOL and ECTOL

February 2006 30CROWN Technology Confidential ©
*CONTROL_IMPLICIT_AUTO
Use Default for ITEOPT and ITEWIN
If there is a convergence issue, use
ITEOPT = 150; ITEWIN = 0 coupled with changes in *CONTROL_IMPLICIT_SOLUTION (recommended for springback)

February 2006 31CROWN Technology Confidential ©
*CONTROL_IMPLICIT_STABLIZATION
*CONTROL_IMPLICIT_STABILIZATION
$$ IAS SCALE TSTART TEND
1 0.01 0.0 1.0
Used for Springback Analysis

February 2006 32CROWN Technology Confidential ©
*CONTROL_IMPLICIT_DYNAMICSUsed for Dynamic Analysis like
Gravity Analysis
1 0.60 0.38

February 2006 33CROWN Technology Confidential ©
*CONTROL_IMPLICIT_EIGENVALUEUsed for extracting Eigen Values
Specify number of Eigen values desired

February 2006 34CROWN Technology Confidential ©
Implicit Simulation
Appendix P of the LS-DYNA 971 Manual provides useful information
R:\OnlineHelp\Tutorials-DYNA\Springback_Manual

*DATABASE_

February 2006 36CROWN Technology Confidential ©
ASCII Files

February 2006 37CROWN Technology Confidential ©
Binary Files*DATABASE_BINARY_D3DUMP
$$ DT/CYCL LCDT BEAM NPLTC
7407
With D3DUMP, cycle is specified, I.e.
If the time step is 6.75e-8 and we need to write the dump file every (0.5 ms), the value of
CYCL = time at which restart files are required X time step = 0.0005X6.75e-8 = 7407
Every 7407 cycles the restart file is written
Use option –dpf d3dump on command line while submitting the job
*DATABASE_BINARY_D3PLOT
$$ DT/CYCL LCDT BEAM NPLTC
5.0000E-04
With D3PLOT, specify the time at which state file is required
*DATABASE_BINARY_INTFOR
$$ DT/CYCL LCID
5.0000E-04
With INTFOR, specify the time at which state file is required

February 2006 38CROWN Technology Confidential ©
*DATABASE_BINARY_INTFOR

February 2006 39CROWN Technology Confidential ©
Use of INTFOR Binary Database
This database can only be opened using LS PREPOST
Output : Contact Pressure/Force/Shear Stress
Can be used to identify wrinkling (Contact Gap)
Wrinkles\Methodology_evaluate_wrinkling_gap.ppt
Wrinkles\LS_PREPOST_Wrinkles.ppt

Adaptivity

February 2006 41CROWN Technology Confidential ©
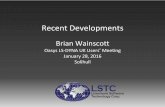
LS-DYNA: Adaptive Meshing
Elements are sub-divided into smaller elements according to the set indicators.
Most widely used indicators for metal forming process are:
Adaptive tolerance angle (ADPTOL)
Maximum level of refinement (MAXLVL)
MAXLVL :- 1 MAXLVL :- 2 MAXLVL :- 3
Change in angle :- 0
Change in angle :- ADPTOL
Change in angle :- 2 * ADPTOL

February 2006 42CROWN Technology Confidential ©
*CONTROL_ADAPTIVE
*CONTROL_ADAPTIVE$$ ADPFREQ ADPTOL ADPOPT MAXLVL TBIRTH TDEATH LCADP IOFLAG 5.000E-04 1.0 1 2$$ ADPSIZE ADPASS IREFLG ADPENE ADPTH ORIENT MAXEL 1 0.23
Please read forming_parameters2.pdf located at R:\OnlineHelp\Tutorials-DYNA\Forming_ManualFor more information on Adaptivity
Equal to blank thicknessEVERY 1 OR 2 MM OF TOOL TRAVEL

February 2006 43CROWN Technology Confidential ©
*CONTROL_ADAPTIVE_CURVE
New option in LS 971 – I have not tried this

February 2006 44CROWN Technology Confidential ©
Added Control on Adaptivity

Material Models

February 2006 46CROWN Technology Confidential ©
Material Models - Summary
Available on LS-DYNA 971 Manual pg 1401 - 1409

February 2006 47CROWN Technology Confidential ©
Material Models

February 2006 48CROWN Technology Confidential ©
*MAT_PIECEWISE_PLASTICITY (MAT_24)
Most frequently used material model to define plasticity
Specify the Failure parameter – effective plastic strain at fialure – FAIL
LCSS – defines the stress-strain curve
LCSR – can be used to incorporate strain rate effect
There are 2 more cards, which are not optional, but should be left blank if LCSS is defined

February 2006 49CROWN Technology Confidential ©
*MAT_3-PARAMETER_BARLAT (MAT_36)
Gives maximum flexibility in modelling plasticity
Define the plasticity (combination of HR, P1 and P2)
•Using stress-strain curve
•Holloman's law
•Hocket Sherby
•Stress-Strain in 3 directions
Define Anisotropy (R00, R45. R90)

February 2006 50CROWN Technology Confidential ©
*MAT_3-PARAMETER_BARLAT (MAT_36)These 3 cards are used to define rolling direction
For other AOPT options see pg 1427 of LS-DYNA 971 Manual
For Rolling direction as X-Axis, specify
A1 = 1, A2 = 0, A3 = 0

February 2006 51CROWN Technology Confidential ©
Plasticity with Damage
Failure Based on Damage Modelling
Failure Based on FLD

February 2006 52CROWN Technology Confidential ©
Other Material Models
Lot of Material Models available for
Rubber
Foam
Spring
Concrete
Tissue

*CONTACT
http://www.dynasupport.com/support/tutorial/contact.modeling

February 2006 54CROWN Technology Confidential ©
ContactSURFACE_TO_SURFACE AUTOMATIC_SURFACE_T
O_SURFACE
FORMING_SURFACE_TO_SURFACE
MasterSlave
1. Normal should point to each other 1. It checks for penetration on
both sides of the shell element so direction of normal does not matter
1. It checks for penetration on both sides of the shell element so direction of normal does not matter
2. ALWAYS takes into account thickness offset.
2. Thickness offset is considered only for SLAVE side (used in metal forming applications).
2. Thickness offset depends on parameters THKOPT Optional Card B of *CONTACT_SURFACE_
Also Parameter SHLTHK comes into picture if THKOPT = 1
THKOPT = 2
THKOPT = 1, SHLTHK = 0
THKOPT = 1, SHLTHK = 1If one of them is rigid
If both of them are rigid
If none of them are rigid

February 2006 55CROWN Technology Confidential ©
Contact
Thickness offsets are always considered for a single surface contact and constraint method type contact
ONE_WAY_SURFACE_TO_SURFACE SURFACE_TO_SURFACE
It is a one way treatment, slave surface is checked for penetration against the master surface and not the other way round
It is a two way treatment, slave surface is checked for penetration against the master surface and vice versa.
http://www.dynasupport.com/support/tutorial/contact.modeling/contact.types

February 2006 56CROWN Technology Confidential ©
Contact Card 1 (Required)
Card 1 is used primarily to define the contact surfaces/parts/nodes

February 2006 57CROWN Technology Confidential ©
Contact Card 1
SSTYP 2: I use it rarely, prefer using Segment
SSTYP 3: Parts with shell elements
SSTYP 0: It is similar to defining Surfaces in ABAQUS. I prefer to use this option while modelling contact where solid elements are involved.
Segments in Contact
SSTYP 0: Also, with shell elements if you want to distinguish between upper and lower surface.

February 2006 58CROWN Technology Confidential ©
Contact Card 2 (Required)20.0 Card 2 is used primarily to define the
friction, birth and death time of contact

February 2006 59CROWN Technology Confidential ©
Contact Card 2 (FS = -2)
Define Friction properties between these part ids

February 2006 60CROWN Technology Confidential ©
Contact Card 3 (Required)Card 3 is used,
If we need to change the penalty stiffness if there is penetration (SFS, SFM)
If we need to specify a different thickness to shell elements (SST, MST)

February 2006 61CROWN Technology Confidential ©
Contact Card 4
For some Contact types, 4th Required card is there and is different for different option,
_TIEBREAK
_CONSTRAINT
_DRAWBEAD
_ERODING
_INTERFERENCE
And few more

February 2006 62CROWN Technology Confidential ©
Contact Card A (Optional)
SOFT =1, if the contacting surfaces have wide variation in the elastic bulk moduli for eg. Metal and Foam
SOFT =2, with SBOPT 3 and DEPTH = 5 : This is used if the contacting surfaces have sharp features eg. Contact with shell edges
http://www.dynasupport.com/support/tutorial/contact.modeling/Contact.Parameters
SOFT =4, it is applicable only with _FORMING. It is similar to ABAQUS’s kinematics formulation. If adaptivity is there this contact is not robust. Also it should not be used on both sides of shell. I will not recommend this option

February 2006 63CROWN Technology Confidential ©
Contact Card B (Optional)
http://www.dynasupport.com/support/tutorial/contact.modeling/Contact.Parameters
See Slide 54

February 2006 64CROWN Technology Confidential ©
Contact Card C (Optional)
http://www.dynasupport.com/support/tutorial/contact.modeling/Contact.Parameters
Treatment of initial penetration in *CONTACT_AUTOMATIC

February 2006 65CROWN Technology Confidential ©
Other Contact Options
http://www.dynasupport.com/support/tutorial/contact.modeling/contact.types
_SMOOTH option is available in release 971: It converts the meshed rigid surface into smooth geometric surface (internally) I.e. no facets
_TIED is use to tie surfaces. It is recommended to use segment to define the two surfaces (SSTYP = 0)
_TIEBREAK: It can be used to model surfaces which are tied but fails when tensile stress and/or shear stress exceeds the defined values

February 2006 66CROWN Technology Confidential ©
Other Contact TYPES
*CONTACT_INTERIOR
These contact types doesn’t follow the same format (I.e. 3 required card) as explained earlier. They have different cards associated with them.
*CONTACT_2D