
Locomotion control for a quadruped robot based on motor primitives Verena Hamburger.
25
Locomotion control for a quadruped robot based on motor primitives Verena Hamburger
-
Upload
todd-bates -
Category
Documents
-
view
219 -
download
2
Transcript of Locomotion control for a quadruped robot based on motor primitives Verena Hamburger.
Locomotion control for a quadruped robot based
on motor primitives
Verena Hamburger
Advantages of motor primitives
• Biologically inspired (mankind, frog etc.)
• Evasion of online trajectory planning
• Simple solution of Bernstein-Problem
• Facilitates the generation and perception of movements (-> mirror neurons)
• Robust classification of faulty movement pattern (even prediction in infants)
• Superposition comparable to linear approximation and Fourier analysis

Importance of morphology• Behavioural diversity• Cheap design• Ecological balance• Emergence of behaviours

Aim
A methodology together with morphology and task independent
measures which aims at the development of quality criteria and
design guidelines for motor primitives and fitting morphologies
Proceeding
1. Preprogrammed experiments
2. Generation of vocabularies
3. Selection of morphologies
4. Behavioural diversity
5. Robustness against variation of morphology, position and inclines of 22.5° and 30°
6. Learning progress of Reinforcement Learning
Development of morphology and task independent measures
Preprogrammed experiments toexplore the potential of the
given hardware

MiniDog6M
• 6 servo motors: shoulder, hind, spine
• Spring approximates artificial muscle
• Control cycle 1 sec because of self-stabilisation
• Identical leg design: one active and one passive dof
• Acceleration sensor (static and dynamic) in the head
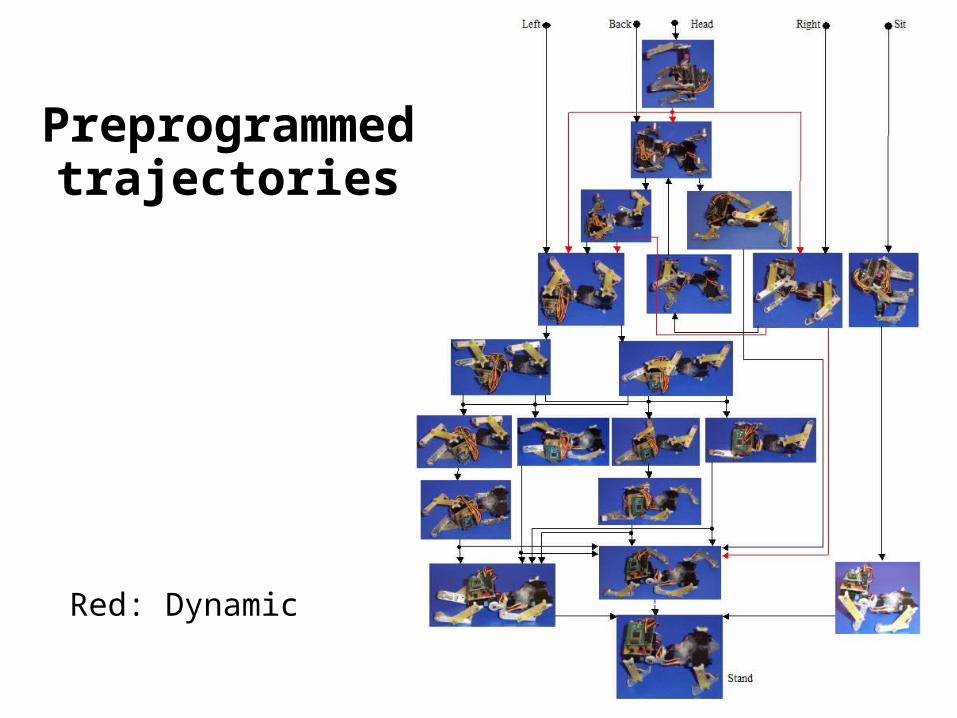
Preprogrammed trajectories
Red: Dynamic
Generation of vocabularies

Flexibility-Index Flx
Some primitives do not specify all motors, but uses stop symbol/Don‘t-Care x instead
=> Flexibility-Index

Transfer into simulation&
Selection of morphologies

Investigated morphologies
• Head has biggest influence on standing up• Original can lie on left, right, back and head• Vertical cannot roll over on back and not stand on
head• Round can roll over on the back most easily, but
cannot lie on back nor stand on head
=> different numbers of possible initial positions
=> different effort for learning
Behavioural diversity &
Robustness against variation of shape and posture
• No uniform definition for intelligence, but behavioural diversity is part of all current definitions
• Increases adaptability
• Not only amount is important, but also a balance between heterogenity and homogenity of solutions
• Mean duration of solutions as non-functional criteria
Behavioural diversity

Behavioural-Diversity-Index BDI
BDI is the product of the total amount of legal sequences with the mean diversity factor D
D is a measure for the heterogenity of sequences.

• Flx > 0 results in higher BDI than Flx = 0
• Compatibility of sequences heavily depends on vocabulary (Sometimes even symmetrical tendencies)
• Position stable: a sequence is successful for more than one initial position of the same head
• Form stable: a sequence is successful for more than one heads of the same initial position
Results (1)
Results (2)
• Only vertical head supports position stability for all vocabularies
• Form OR position stable sequences involve primitives with and without Don't-Care (Flx ≥ 0)
• Form AND position stable sequences involve only primitives without Don't-Care (Flx = 0)
Robustness on inclines of 22.5° and 30°
Results
• Weight distribution and centre of mass are identical in all three heads
• Original and the round head perform equally or better than on flat terrain => most robust
• Vertical head: solutions for Left and Right are exchanged (sometimes one side behaves as if with original head)
=> Morphological effect which is purely grounded in the shape

Learning progress:
Q-Function is linearly approximated on the basis of a
RadialBasisFunction-Network

Results (1)
• BDI > 10 guarantees success within max. 100 of 200 given episodes
• Vocabularies with low BDI often do not find a solution for one or more initial positions

Results (2)
• Flx > 0 outweighs the higher learning effort through more initial positions
Flx = 0 Flx > 0

Conclusion
• Only few vocabularies are equally good at all features and morphologies
• Use of Don't-Care (Flx > 0) is good for BDI and learning progress, but not for robustness
• Effects of shape and material must already be considered in the design phase
• No need for adaptation in case of proper design and enough behavioural diversity
• Currently cheapest design and control of a running quadruped
To Do
• Application of this methodology to many different tasks, morphologies, learning methods and vocabularies
• Examination of robustness on different ground properties e.g. elastic, irregular
• Additional investigations of sensory-motor-coordination

The end.


















