

Localization protocols for wireless sensor networks Stefan Dulman Email: [email protected].
55
-
date post
19-Dec-2015 -
Category
Documents
-
view
220 -
download
0
Transcript of Localization protocols for wireless sensor networks Stefan Dulman Email: [email protected].
energy efficient sensor networks
Presentation Overview
Introduction and motivation
Lateration – a simple approach
ClassificationCentralized methods
One hop positioning
Distributed methods
Relative positioning
Mobility schemes
Conclusions
energy efficient sensor networks
Wireless Sensor Networks
Nodes with VERY limited resources16 bit processor, 2KB RAM, 60KB FLASH
Low data-rate radio (115.200 bits/sec)
Limited energy available (1-2 small batteries)
Small physical size
Networks characteristicsDistributed network, mobile unreliable nodes
Deployed in a harsh environment
Self-organizing and self-healing

energy efficient sensor networks
Ideal Sensor Networks
“Smart Dust”Tens of thousands of sensor nodes
Node lifetime longer than 2 years
Node size smaller than 1 mm3
Node price smaller than 5 cents
energy efficient sensor networks
Typical Applications
A broad range of applications, all possibilities definitely not explored yet!Environment and wildlife monitoring
Remote study of the birds on Great Duck IslandZebra monitoring in Kenya
… and even more monitoringIndustryAgricultureDisaster controlSurveillance and security systems
energy efficient sensor networks
Is positioning necessary?
YES!Can be the mean or the goal of a WSN applicationApplication examples:
Meteorological and environmental monitoringData has no meaning if not stamped with time + location
Package trackingLibrary archivingPosition tracking (e.g. military applications)
Is used as building block in:Routing protocolsData dissemination protocolsLocalization as application of WSN

energy efficient sensor networks
Example: geographic routing
Allows development of algorithms with better scalability
Position centric addressing first proposed in 1970’sRecent growing interest for it
Nodes are addressed by their location instead of ID
No additional job required to support routing
State of the packet (position) and destination position are sufficient
Simplest algorithm: Cartesian routing
Stojmenovic (IEEE Commun.Magazine 2002) presents several strategies for geographical routing

energy efficient sensor networks
Problem statement
Regular assumptions for WSN protocol test scenarios:Large number of nodes
Random deployment in a (known shape) given area
Known (identical) transmission range for all nodes
Static/not very dynamic networks
Question: What are the geographical positions of the nodes?
Absolute positioning
Relative positioning

energy efficient sensor networks
A possible solution?
Usage of Global Positioning System (GPS) devices
Not a feasible solution for WSN:High cost of the device (value/energy/computation power/space)
Unavailability/poor precision of the service in special environments (indoors, underground, etc.)
Conclusion: other approaches need to be developed and deployed
energy efficient sensor networks
Lateration - A simple solution

energy efficient sensor networks
Lateration description
Example: 2D space
Given:Three points with known positions
Distances to all three of them
Position can be determined by intersecting three circle centered in the points with radius the known distances

energy efficient sensor networks
Lateration as localization technique
energy efficient sensor networks
Lateration’
The concept can be easily applied to multihop networks
The method as such is not too useful:Imprecise position information
Imprecise distance estimates
The three circles usually do not intersect in a point (or at all!)
Several algorithms developed on this simple idea (e.g. APS schemes)

energy efficient sensor networks
Classification
energy efficient sensor networks
Classification
Different aspects of localization studied in vision, robotics, signal processing, networking, etc.
Solutions can be classified in several manners:One-hop or multi-hop schemes
Range free or range based schemes
Absolute, relative or local coordinates
Centralized, distributed or localized algorithms

energy efficient sensor networks
Centralized methods
energy efficient sensor networks
Centralized methods
All the data is collected at a central point and a global map is computed at once
Advantages:High quality solutions (in terms of the average distance error)
Global maps available
Disadvantages:Data needs to travel to a central point
High computation power required
Methods usually do not scale with the network size

energy efficient sensor networks
Centralized methods
Convex optimizationOne of the first schemes available
Treats the localization problem from the point of view of linear programming and semi-definite programming
Various constraints are represented as linear matrix inequalities
energy efficient sensor networks
Convex optimization’
Advantages:It is simple to model the distance and angle information
The solutions provided are optimal
Efficient computational methods have already been developed
Disadvantages:All the disadvantages of the centralized methods class
Computation complexities:Linear programming is quadratic in the number of connections
Semi-definite is cubic in the number of connections
energy efficient sensor networks
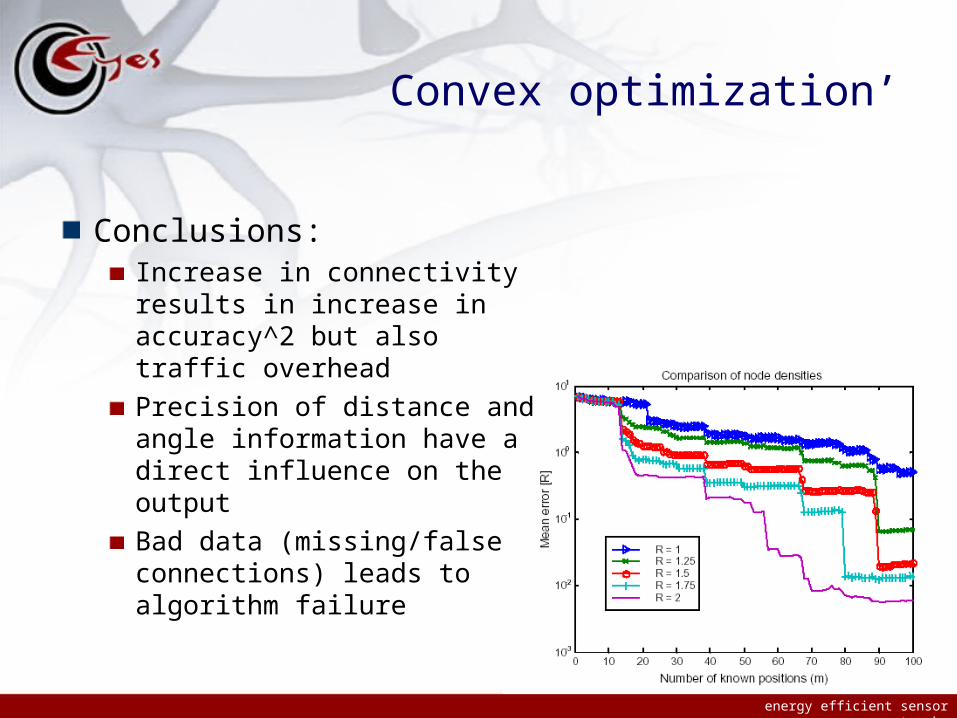
Convex optimization’
Conclusions:Increase in connectivity results in increase in accuracy^2 but also traffic overhead
Precision of distance and angle information have a direct influence on the output
Bad data (missing/false connections) leads to algorithm failure
energy efficient sensor networks
Centralized methods
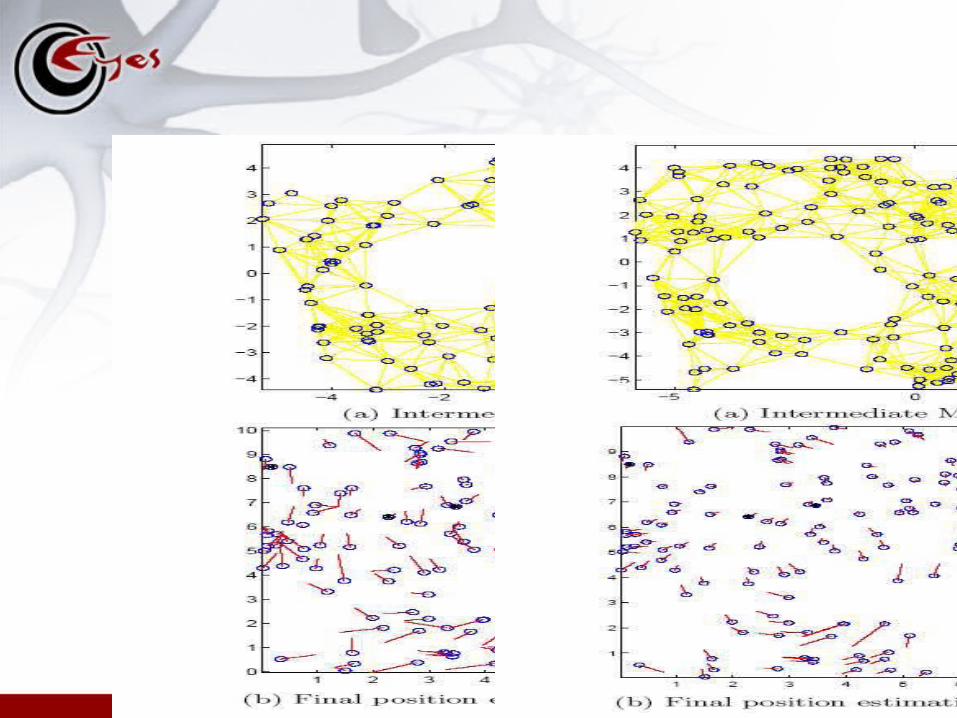
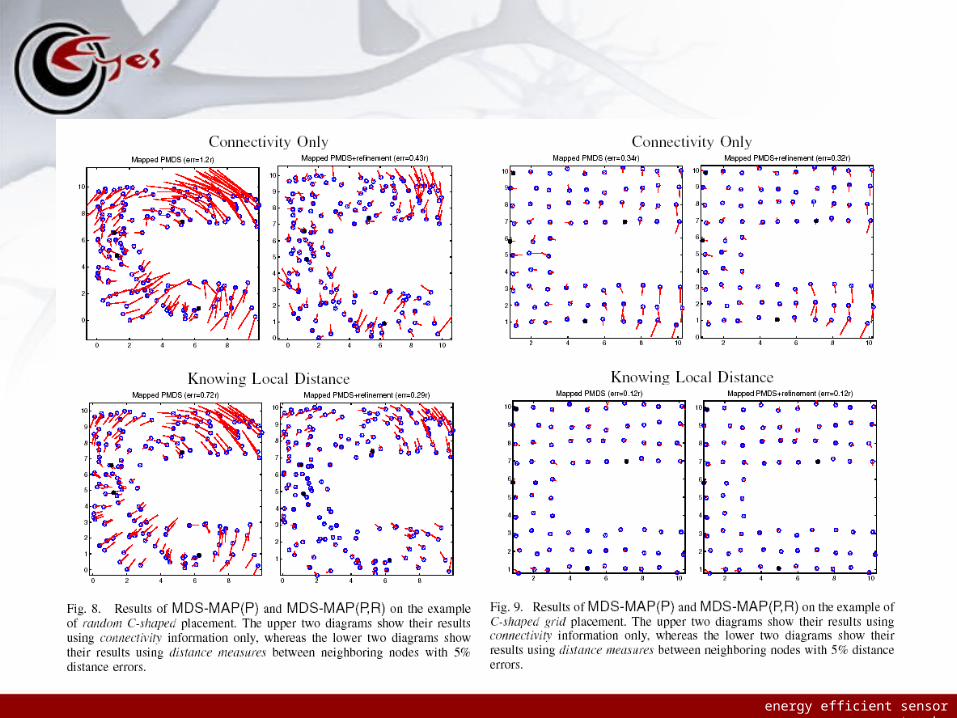
Multidimensional scalingMDS-MAP method, makes use of connectivity information (and also distance information) to compute a relative (global) map
Finds an embedding in a lower dimensional space for a set of objects characterized by pair-wise distances between them
Recently the centralized method has been extended to a localized algorithm
energy efficient sensor networks
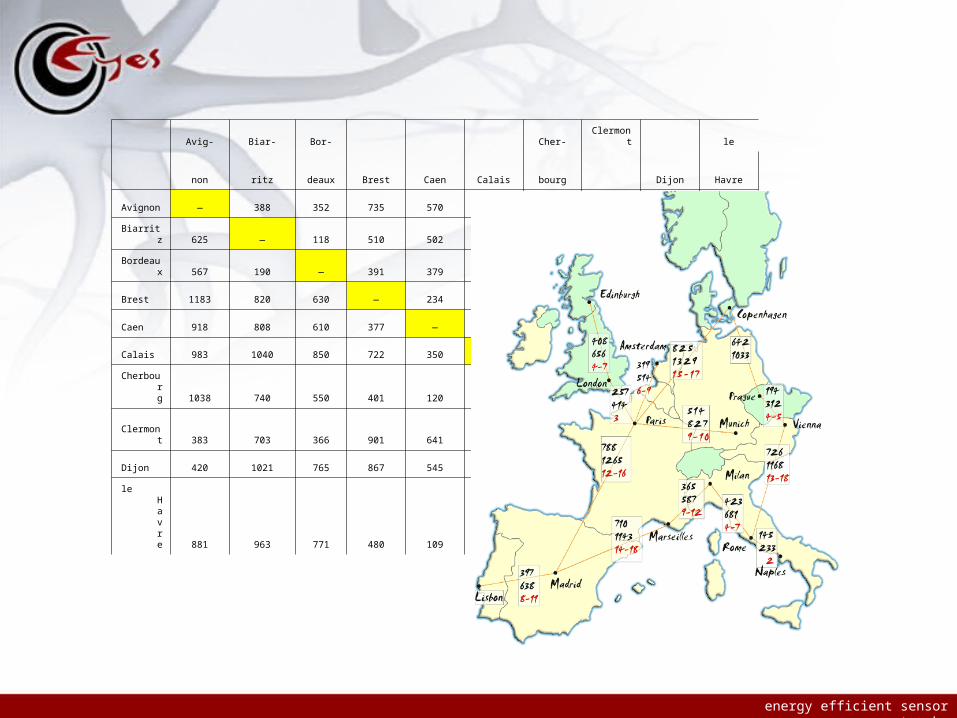
Avig- Biar- Bor-
Brest Caen Calais
Cher- Clermont
Dijon
le
non ritz deaux bourg Havre
Avignon — 388 352 735 570 611 645 238 261 547
Biarritz 625 — 118 510 502 646 460 437 634 598
Bordeaux 567 190 — 391 379 528 342 227 475 479
Brest 1183 820 630 — 234 449 249 560 539 298
Caen 918 808 610 377 — 217 75 398 339 68
Calais 983 1040 850 722 350 — 293 442 355 174
Cherbourg 1038 740 550 401 120 471 — 473 413 142
Clermont 383 703 366 901 641 711 761 — 214 378
Dijon 420 1021 765 867 545 571 665 345 — 323
le Havre 881 963 771 480 109 280 229 608 520 —

energy efficient sensor networks
Multidimensional scaling
DisadvantagesThe regular ones for centralized methods
AdvantagesIt is a quite precise method (one of the best so far)
Can work only with connectivity (and distance) information
Only 3 anchors are needed for a global map (in 2D)
Theoretical bound on the complexity of the method(SVD is cubic in the number of nodes)
A recent paper describes a localized scheme based on MDSCan deal with topologies containing holes
Eases the complexity of the computation
energy efficient sensor networks
energy efficient sensor networks
energy efficient sensor networks
One hop positioning

energy efficient sensor networks
One hop positioning
Nodes can directly contact the landmarks (e.g. GPS)
AdvantagesElegant solutions with precise results
DisadvantagesLine of sight is needed between the nodes and the landmarks
Landmarks need to be powerful devices

energy efficient sensor networks
One hop positioning’
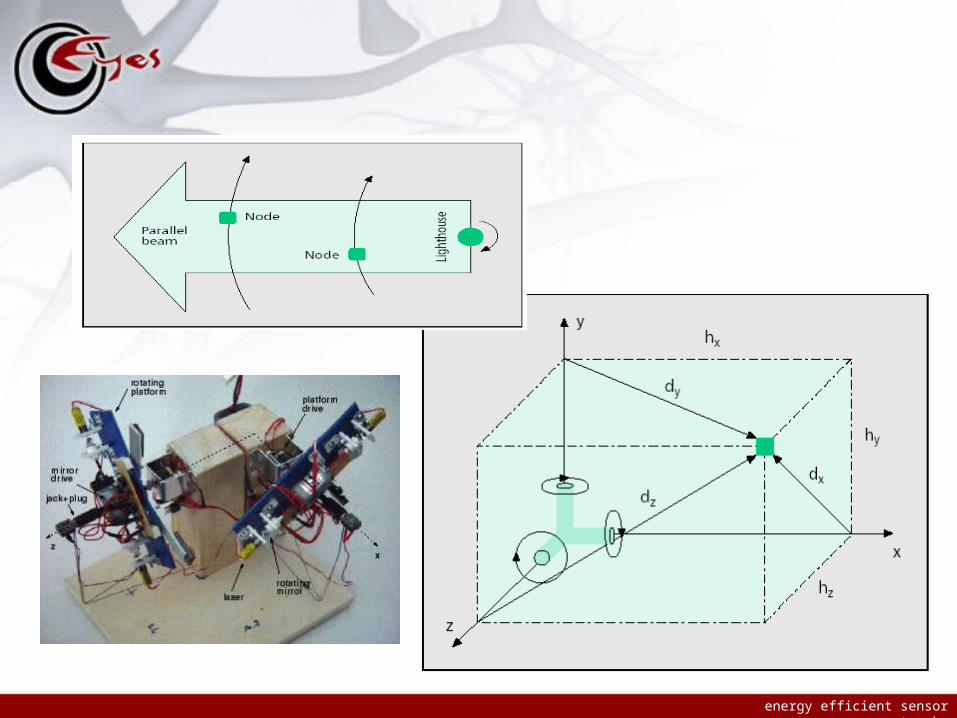
The lighthouse systemPositioning of an entire field of sensors may be achieved with only a single lighthouse device capable of “seeing” all the nodes
This device is able to collect all the data and at the same time help nodes localize themselves
The system requires each node to be equipped with a photo detector and a clock
energy efficient sensor networks
energy efficient sensor networks
Light House System’
Advantages:Simple theoretical method
The prototype used a single lighthouse device
For the 2D experiments: nodes situated at 14 meters positioned themselves with a relative accuracy of 2.2% and relative standard deviation of 0.68%.
Disadvantages:The line of sight assumption is a very strong one
Solution specific to the hardware
energy efficient sensor networks
Distributed methods
energy efficient sensor networks
Distributed methods
These methods allow nodes to compute their position by communicating to their neighbors only
Advantages:No need of global knowledge
Simple methods, majority of algorithms fit the hardware
Lower communication overhead
DisadvantagesHigh number of anchors needed
Not all the nodes can compute their position
The resulting positions are less precise

energy efficient sensor networks
Distributed methods
Ad hoc localization system (AhLOS)Defines and combines several types of multilateration
Its main strong point is that it is a completely distributed protocol
Its weakest point is that the number of needed anchors should be large for a good result
energy efficient sensor networks
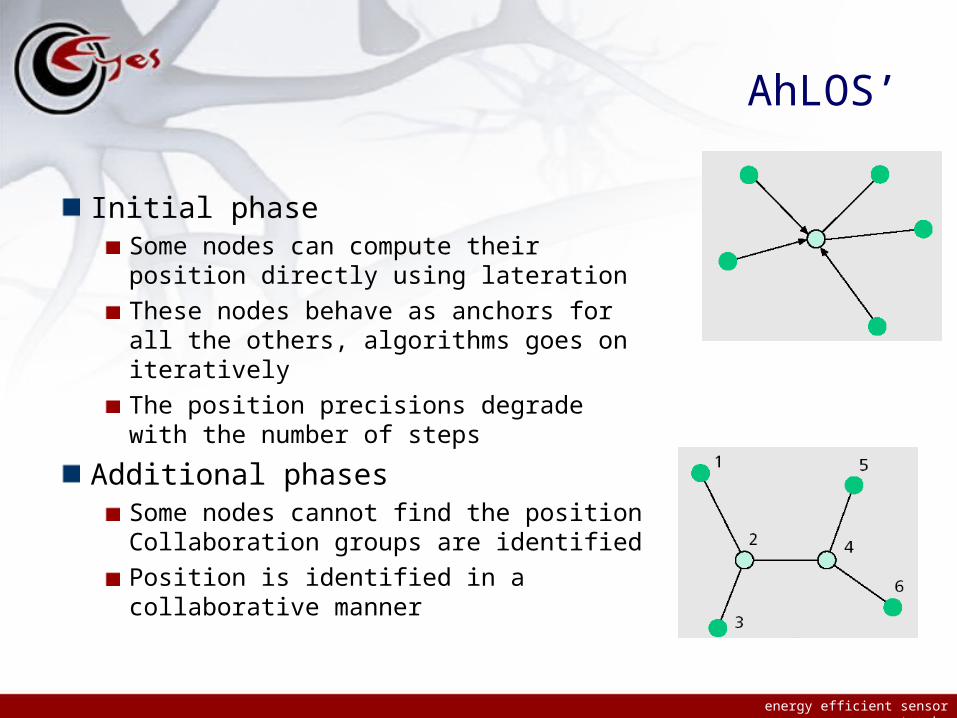
AhLOS’
Initial phaseSome nodes can compute their position directly using lateration
These nodes behave as anchors for all the others, algorithms goes on iteratively
The position precisions degrade with the number of steps
Additional phasesSome nodes cannot find the position Collaboration groups are identified
Position is identified in a collaborative manner
energy efficient sensor networks
AhLOS’
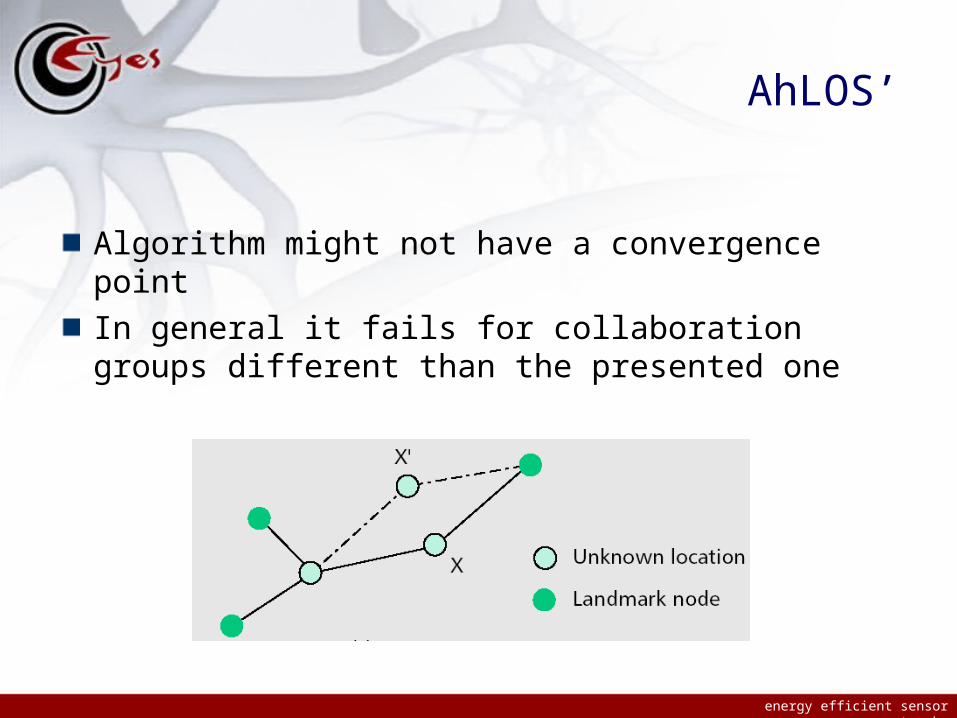
Algorithm might not have a convergence point
In general it fails for collaboration groups different than the presented one
energy efficient sensor networks
AhLOS’
Advantages:AhLOS may produce very good results if accurate distance measurement hardware is present
Major disadvantage: very large number of beacons is required
Example: av. connectivity ~6.28
90% of regular nodes positions to be resolved
45% landmarks required
energy efficient sensor networks
Distributed methods
Ad-Hoc positioning systems (APS or DV…)It is a combination between two major ideas:
Distance vector routing (DV)(information is forwarded hop by hop from each anchor in the network)
Global positioning system (GPS)(eventually each node will compute its position based on anchors positions and distance estimates)
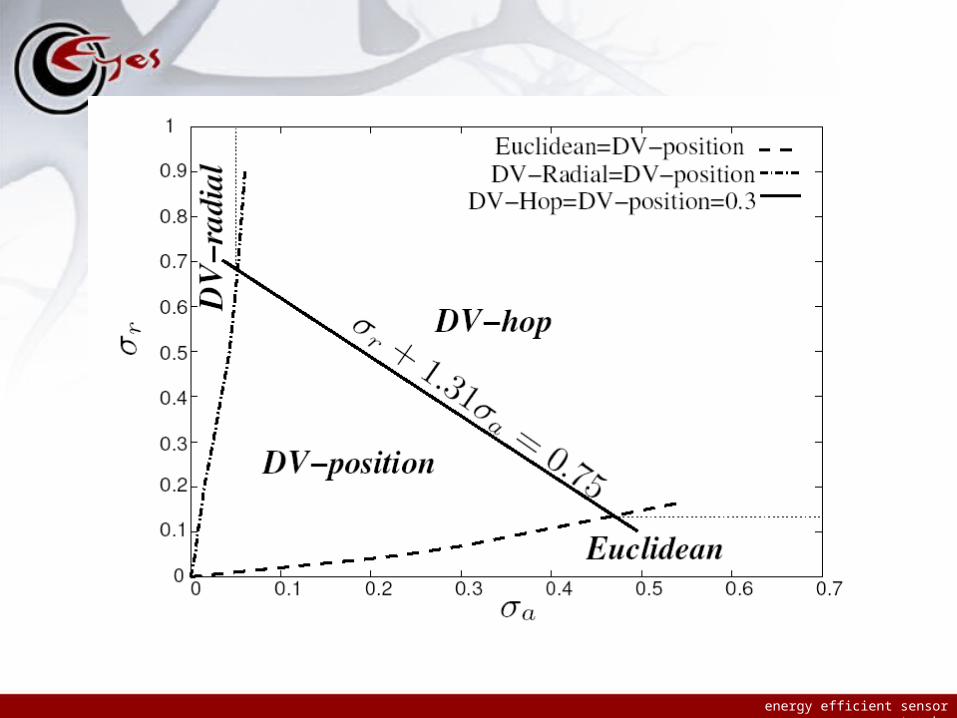
The schemes adapt connectivity, distance, angle of arrival and compass information(6 possible combinations make sense and were studied)
energy efficient sensor networks
APS’
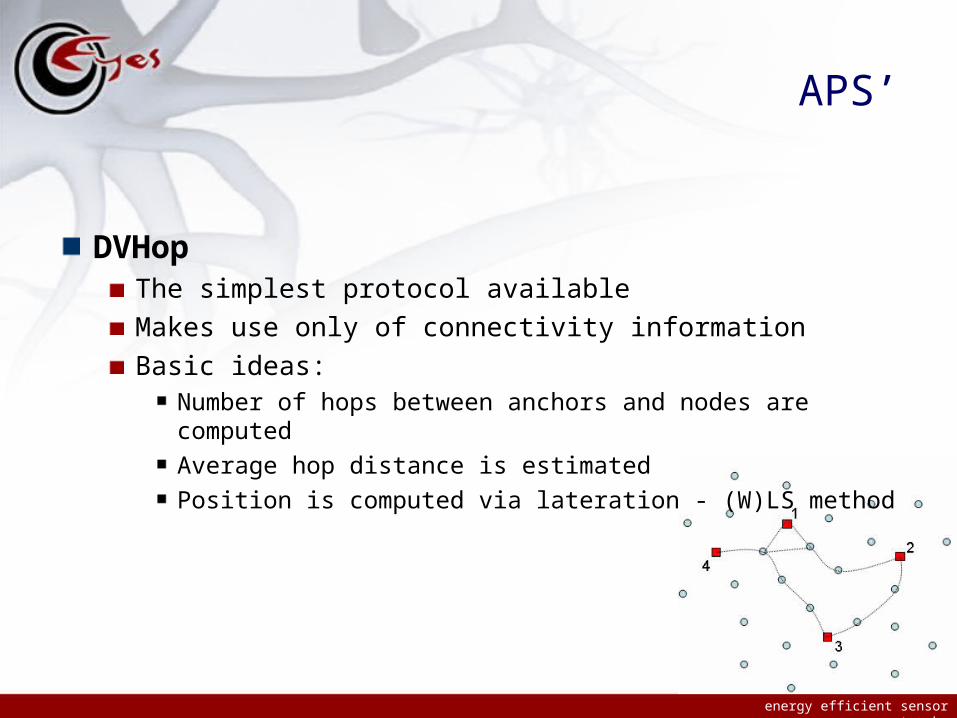
DVHopThe simplest protocol available
Makes use only of connectivity information
Basic ideas:Number of hops between anchors and nodes are computed
Average hop distance is estimated
Position is computed via lateration - (W)LS method
energy efficient sensor networks
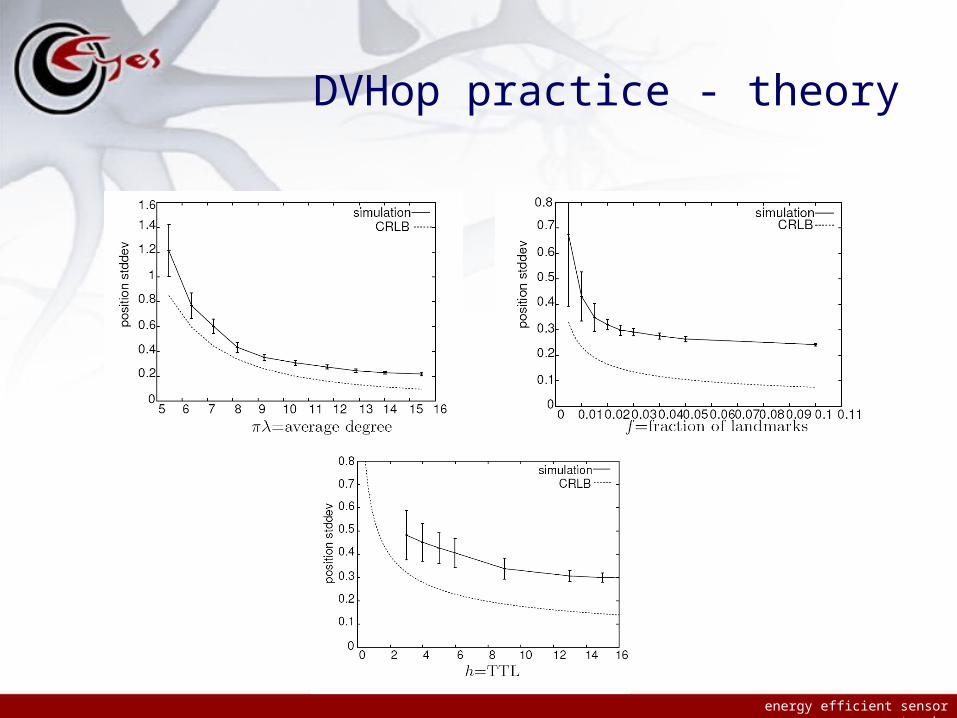
DVHop practice - theory

energy efficient sensor networks
APS’
DVDistanceIdentical with DVHop, but shortest path distance is propagated instead of hopcount
A new parameter has to be taken into consideration: the time to live (TTL) of the messages
There is a close connection between TTL and the final precision
-0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4-0.2
0
0.2
0.4
0.6
0.8
1
1.2
-0.2 0 0.2 0.4 0.6 0.8 1 1.2-0.2
0
0.2
0.4
0.6
0.8
1
energy efficient sensor networks
APS’
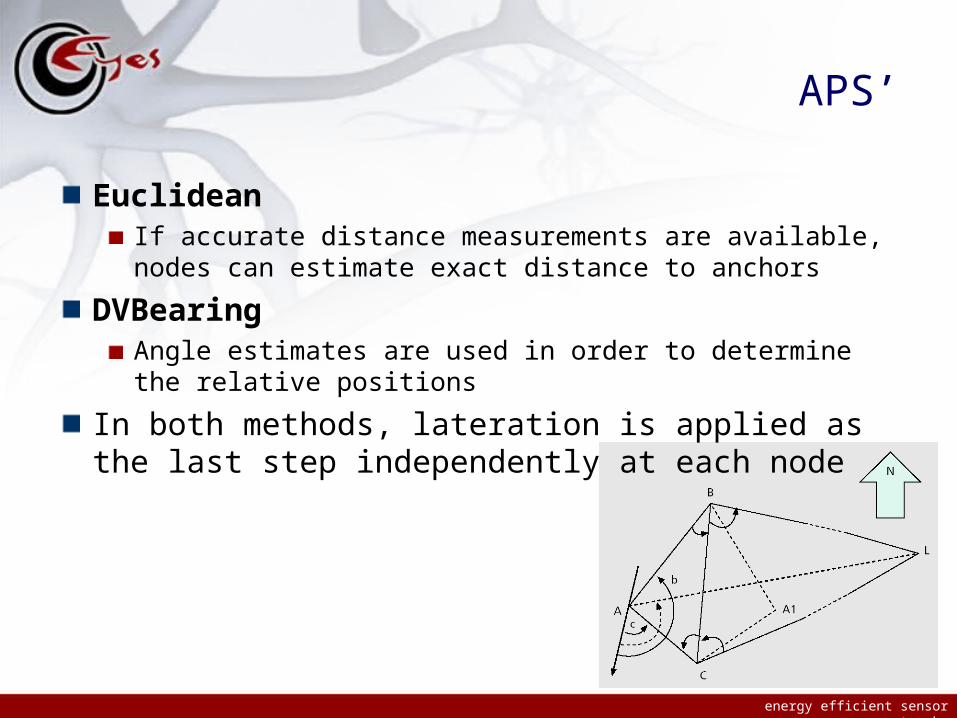
EuclideanIf accurate distance measurements are available, nodes can estimate exact distance to anchors
DVBearingAngle estimates are used in order to determine the relative positions
In both methods, lateration is applied as the last step independently at each node
energy efficient sensor networks
energy efficient sensor networks
APS conclusions
Advantages:Distributed and localized protocols
Support some limited mobility (periodic schemes)
Can deal with various combinations of connectivity, distance estimates, angle estimates, compass information
DisadvantagesUniform distribution of anchors required
The DV component will ask for a high cost in case mobile scenarios
energy efficient sensor networks
Relative positioning

energy efficient sensor networks
Relative positioning
Relative positioning schemes generate a relative map, in a local coordinate system
Obtained positions are coherent all over the network (position based services are able to work)
energy efficient sensor networks
Relative positioning’
The self positioning algorithm (SPA)The coordinate system is determined by a location reference group (LRG)
Nodes exchange info with neighbors to determine second neighborhood information (connectivity + distances)
Local maps are constructed
LRG helps orienting all the maps by aligning all the coordinate systems

energy efficient sensor networks
SPA’
The approach is quite similar to the distributed version of multidimensional scaling algorithm
Advantages:Network-wide coherence is provided
No landmarks (anchors) are needed
Disadvantages:Existence of a location reference group is expensive if mobility is taken into account (even limited mobility and even if particular conditions apply)
energy efficient sensor networks
Mobility schemes
energy efficient sensor networks
Localization and mobility
All the presented schemes might work in presence of limited mobility
The basic mechanism would be to run periodically the algorithms
The computed positions will almost never reflect reality (computation takes time) but trajectories could be estimated, etc.
energy efficient sensor networks
Distinct approach
Sequential Monte Carlo localization (Mobicom 2004)Adaptation of Monte Carlo localization used in robotics
Discrete time model
Posterior distributions are computed based on a set of weighted samples
Each step is divided in two:Prediction phase (new position estimates are computed)
Filtering phase (position estimates are filtered and space is resampled)
SMC already applied to target tracking, robot localization and computer vision
energy efficient sensor networks
SMCL
Initial phase: initially, position is unknown so the sample space is randomly chosen
Step n:Phase 1: location set is updated based on observations and possible movements
Speed information is used (speed distribution assumed known)
Phase 2: computed positions inconsistent with observations are removed. Re-sampling is used to assure constant number of samples
Observations = anchors (‘seeds’) are present one or two hops away
energy efficient sensor networks
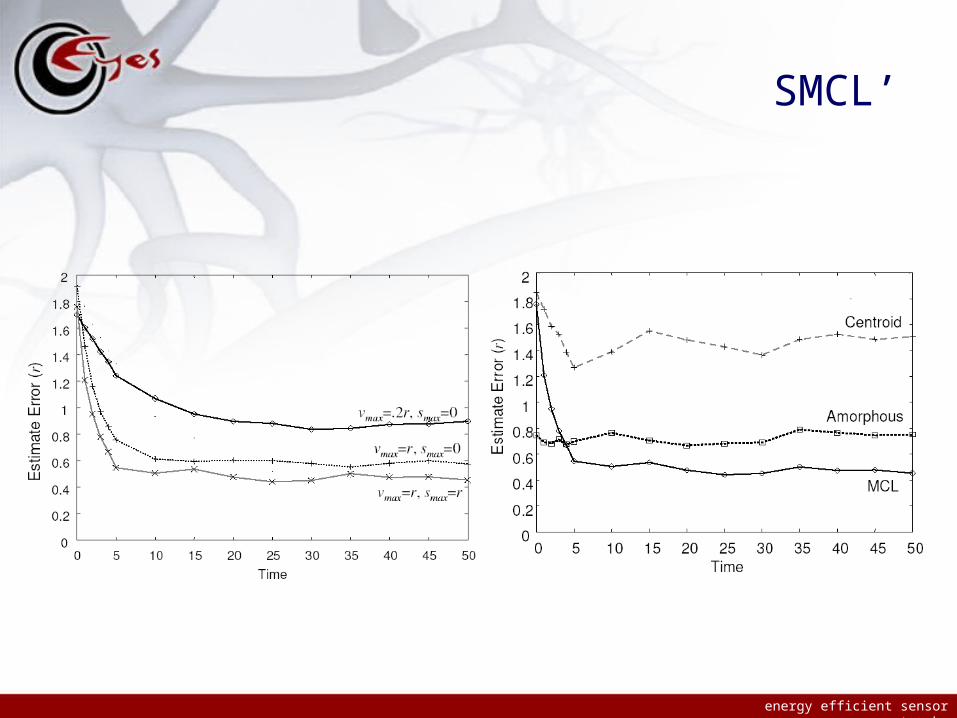
SMCL’

energy efficient sensor networks
Conclusion SMCL
Completely counter-intuitive!!!
Mobility improves localization results and reduces localization cost
More amazing: this is a range-free scheme (no distance estimates are used, only connectivity information)
A lot of work to be done: testing of all assumption, different mobility models, security, etc.
energy efficient sensor networks
Conclusions
energy efficient sensor networks
Conclusions
Localization is an essential service (both goal and mean)Line-of-sight solutions (GPS) less attractive in WSN
New schemes need to be developed
Large variety of assumptionsno “one size fits all” protocol exists
We described just the main ideas used, combinations lead to a huge number of protocols !
Large majority of protocols “proven by simulation”
Latest publications show increased interest for theoretical results














![176083-os-Ru.pdf [ 3 ], page 1 @ Preflight - utwente.nl](https://static.fdocuments.in/doc/165x107/626b2a39a55218028621ffc8/176083-os-rupdf-3-page-1-preflight-.jpg)


