LOCALIZATION AND POSITIONING via Wi-Fi SIGNALS MOHD ...
24
LOCALIZATION AND POSITIONING via Wi-Fi SIGNALS MOHD IDZWAN BIN OTHMAN This Report Is Submitted In Partial Fulfillment Of Requirements For The Bachelor Degree of Electronic Engineering (Telecommunication Electronics) with Honours Faculty of Electronic and Computer Engineering Universiti Teknikal Malaysia Melaka JUNE 2013
Transcript of LOCALIZATION AND POSITIONING via Wi-Fi SIGNALS MOHD ...
LOCALIZATION AND POSITIONING via Wi-Fi SIGNALS
MOHD IDZWAN BIN OTHMAN
This Report Is Submitted In Partial Fulfillment Of Requirements
For The Bachelor Degree of Electronic Engineering
(Telecommunication Electronics) with Honours
Faculty of Electronic and Computer Engineering
Universiti Teknikal Malaysia Melaka
JUNE 2013

UNIVERSTI TEKNIKAL MALAYSIA MELAKA
FAKULTI KEJURUTERAAN ELEKTRONIK DAN KEJURUTERAAN KOMPUTER
BORANG PENGESAHAN STATUS LAPORAN
PROJEK SARJANA MUDA II
Tajuk Projek : LOCALIZATION AND POSITIONING via Wi-Fi SIGNALS
Sesi Pengajian : 2 / 2012/2013
Saya MOHD IDZWAN BIN OTHMAN
mengaku membenarkan Laporan Projek Sarjana Muda ini disimpan di Perpustakaan dengan syarat-syarat kegunaan seperti berikut:
1. Laporan adalah hakmilik Universiti Teknikal Malaysia Melaka.
2. Perpustakaan dibenarkan membuat salinan untuk tujuan pengajian sahaja.
3. Perpustakaan dibenarkan membuat salinan laporan ini sebagai bahan pertukaran antara
institusi pengajian tinggi.
4. Sila tandakan ( √ ) :
SULIT*
(Mengandungi maklumat yang berdarjah keselamatan atau
kepentingan Malaysia seperti yang termaktub di dalam AKTA
RAHSIA RASMI 1972)
TERHAD*
(Mengandungi maklumat terhad yang telah ditentukan oleh
organisasi/badan di mana penyelidikan dijalankan)
TIDAK TERHAD
Disahkan oleh:
__________________________ ___________________________________
(TANDATANGAN PENULIS) (COP DAN TANDATANGAN PENYELIA)
Tarikh: 10 Jun 2013 Tarikh: 10 Jun 2013

iii
DECLARATIONS
“I hereby declare that this report is the result of my own work except for quotes as
cited in the references.”
Signature : ..................................................
Author : MOHD IDZWAN BIN OTHMAN
Date : 10th June 2013

iv
“I hereby declare that I have read this report and in my opinion this report is
sufficient in terms of the scope and quality for the award of Bachelor of Electronic
Engineering (Telecommunication Engineering) With Honours”.
Signature : …………………………………………
Supervisor’s Name : ABD. SHUKUR BIN JA’AFAR
Date : 10th June 2013

v
Special thanks to my parents and family, my colleagues and friends, and project
supervisor who have been supporting me all the time.

vi
ACKNOWLEDGMENT
First and foremost, praise to Allah the Almighty because without His grace I will
not be able to complete this Projek Sarjana Muda and report as well as possible. Here, I
wish to express my sincere gratitude to my supervisor, Mr. Abd. Shukur bin Ja’afar for
his germinal ideas, invaluable guidance, continuous encouragement and constant
support. I also sincerely thanks for the time spent proofreading and correcting my
mistakes.
I acknowledge my sincere indebtedness and gratitude to my parents for their
love, dream and sacrifice throughout my life. I cannot find the appropriate words that
could properly describe my appreciation for their devotion, support and faith in my
ability to attain my goals.
Finally, I also would like to thanks for those who are involved directly and
indirectly through out completing the project and report successfully.

vii
ABSTRACT
Global Positioning System (GPS) is widely used as public location and
positioning system in locating and localizing geo-location coordinates of user. However,
this application signal is limited, not operational, not available and inefficient for indoor
environment. Therefore, the purpose of this project is to develop localization and
positioning system utilizing Wi-Fi signals. Wireless position estimation is based on
distance measurement in determining the coordinates of user. Scene analysis which
called fingerprinting technique is chosen in this project with measurement of received
signal strength at specific locations. This fingerprint positioning algorithm has two
phases to go through which is surveying phase and online phase. The unknown location
of user will be located during online phase based on database comparison that has been
collected on surveying phase. MATLAB Graphic User Interface was developing as user
interface for simulation purpose. Several analysis has been done to determine the
accuracy and effectiveness of the positioning error due to numbers of access point and
environment traffic condition.

viii
ABSTRAK
Sistem Kedudukan Global (GPS) telah digunakan secara meluas sebagai
penunjuk lokasi awam dan sistem kedudukan dalam mencari dan menentu koordinat
lokasi geografi pengguna. Walaubagaimanapun, isyarat aplikasi penerima ini adalah
terhad, tidak beroperasi, tidak berfungsi dan tidak cekap untuk persekitaran dalaman.
Oleh itu, tujuan projek ini adalah untuk membangunkan menentu dan sistem mencari
kedudukan menggunakan isyarat Wi-Fi. Anggaran kedudukan tanpa wayar berdasarkan
ukuran jarak digunakan dalam menentukan koordinat pengguna. Analisis pemandangan
iaitu algoritma fingerprint teknik telah dipilih dalam projek ini dengan pengukuran
kekuatan isyarat yang diterima. Algoritma kedudukan fingerprint ini mempunyai dua
fasa yang perlu dilalui iaitu fasa pengukuran dan fasa dalam talian. Lokasi yang tidak
diketahui pengguna akan terletak semasa fasa dalam talian berdasarkan perbandingan
pangkalan data yang telah dikumpul semasa fasa pengukuran. MATLAB Grafik Antara
Muka Pengguna dibangunkan sebagai antara pengguna bagi tujuan simulasi. Beberapa
analisis telah dilakukan untuk menentukan ketepatan dan keberkesanan kedudukan
terhadap jumlah akses pusat dan keadaan lalu lintas persekitaran.

ix
TABLE OF CONTENTS
CHAPTER TITLE PAGE
PROJECT TITLE i
COMFIRMATION OF STATUS REPORT ii
DECLARATION iii
SUPERVISOR DECLARATION iv
DEDICATION v
ACKNOWLEDGEMENT vi
ABSTRACT vii
ABSTRAK viii
TABLE OF CONTENTS ix
LIST OF TABLES xii
LIST OF FIGURES xiii
LIST OF ABBREVIATIONS xv
LIST OF APPENDICES xvi
1 INTRODUCTION
1.1 Overview of Technologies 1
1.2 Project Background 5
1.3 Problem Statement 6
1.4 Objectives 6
1.5 Scope of Project 7

x
2 LITERATURE REVIEW
2.1 Triangulation 9
2.2 Trilateration 11
2.3 Scene Analysis 15
2.3.1 Ekahau Site Survey 20
2.3.2 VisiWave Site Survey 21
2.3.3 TamoGraph Site Survey 22
2.4 Comparison between Positioning Algoritm 23
3 METHODOLOGY
3.1 Project Methodology 24
3.1.1 Phase 1 - Planning 25
3.1.1.1 Data Collection 26
3.1.1.2 Hardware and software requirements 26
3.1.2 Phase 2 - Measurement 27
3.1.2.1 Scene Analysis Technique 28
3.1.3 Phase 3 - Development 35
3.1.3.1 Development of Distance Algorithm 35
3.1.3.2 Development of Graphical User Interface 37
3.1.4 Phase 4 - Testing 37
4 RESULT AND DISCUSSION
4.1 Distance Estimation Algorithm 38
4.1.1 Location Estimation Calculation 39
4.1.2 Analysis of Algorithm Effectiveness
4.1.2.1 Comparison between Numbers of 49

xi
Access point Access point
3.1.3 4.1.2.2 Comparison between Numbers of
Access Point Access Point and Traffic Condition
50
5 CONCLUSION AND FUTURE WORKS
5.0 Conclusion 51
5.1 Future Works 52
REFERENCES 53
APPENDICES 55
xii
LIST OF TABLES
NO TITLE PAGE
1.1 Indoor versus outdoor positioning 2
1.2 Indoor Positioning Technologies 3
2.1 Advantages and disadvantages of positioning algorithm 23
3.1 Received Signal Strength color level 30
3.2 Region color description 31
3.3 Received Signal Strength database in dBm 33
3.4 Received Signal in matrix form 34
4.1 Received Signal Strength database in dBm at each Reference Location 40
4.2 Received Signal Strength database Normalized at Access Point 1 41
4.3 Received Signal Strength database between User Normalized and
database values
43
4.4 Received Signal Strength at sample location 47
4.5 Location estimation in real time 47
4.6 Comparison between Numbers of Access Point 49
4.7 Comparison between Traffic Conditions 50
xiii
LIST OF FIGURES
NO TITLE PAGE
1.1 Indoor technologies in dependence on accuracy and coverage 4
1.2 Indoor technologies dependence on accuracy and carrier wavelength 4
1.3 Positioning system block diagram 5
1.4 Flow chart scope of project 8
2.1 Triangulation algorithm in 2D 10
2.2 Graph of relative position error versus target angle 11
2.3 Trilateration positioning algorithms 12
2.4 2D target location by TOA measurement technique 13
2.5 Geometric relationship between target and two APs 14
2.6 Surveying phase 16
2.7 Online phase 16
2.8 Scene analysis system 17
2.9 Offline phase and online phase of scene analysis technique 17
2.10 Database comparison 18
2.11 Wi-Fi contour power (dBm) line coverage 19
2.12 Ekahau Site Survey icon 20
2.13 Ekahau Site Survey window 20
2.14 VisiWave Site Survey icon 21
2.15 VisiWave Site Survey window 21
2.16 TamoGraph Site Survey icon 22
2.17 Tamograph Site Survey window 22
3.1 Design phase 25
3.2 Steps of Methodology 25
3.3 Flow chart of surveying phase 27
3.4 Orientations during taking measurement 28
xiv
3.5 Orientations affect on Received Signal Strength 28
3.6 Block B, ground Floor, FKEKK 29
3.7 Surveying phase on coverage area 29
3.8 Data extracted in WordPad 30
3.9 Coverage area 31
3.10 Coverage area plotting point in MATLAB 32
3.11 MATLAB Simulink icon 35
3.12 MATLAB Simulink window 35
3.13 Flow chart of distance algorithm 36
4.1 Theorem Pythagoras area 39
4.2 Coverage area plotting point in matrix 39
4.3 Location estimation area 45
4.4 Scale on the coverage area 46
4.5 Sample location 46
4.6 Location estimation of sample location taken 47
4.7 MATLAB GUI 48
4.8 MATLAB GUI output 48
5.1 Example of ToA location estimation 52
xv
LIST OF ABBREVIATIONS
ABBREVIATION MEANING
GPS Global Positioning System
RFID Radio Frequency IDentification
laser Light Amplification by Stimulated Emission of Radiation
WLAN Wireless Local Area Network
RSS Received Signal Strength
AP Access Point
FKEKK Fakulti Kejuruteraan Elektronik dan Kejuruteraan Komputer
PSM Projek Sarjana Muda
UTeM Universiti Teknikal Malaysia Melak
RSS Received Signal Strength
AoA Angle Of Arrival
2D Two Dimensions
ToA Time Of Arrival
TDoA Time Difference Of Arrival
TOF Time Of Flight
WLAN Wireless Local Area Network
UWB Ultra-Wideband
Wi-Fi Wireless Fidelity
A-GPS Assisted Global Positioning System
GNSS Global Navigation Satellite System
RTLS Real-time Locating System
ANSI American National Standards Institute
ISO International Organization for Standardization
SSID Service Set Identifier
LBS Location-based Service
xvi
LIST OF APPENDICES
NO TITLE PAGE
A Euclidean distance program 55
B MATLAB GUI program 57
C Gantt Chart of project planning 63
D Poster 64
E IEEE report 65
CHAPTER 1
INTRODUCTION
1.0 Introduction
This chapter will discuss briefly the background of the project that has been
chosen. It will also discuss the problem statement, main objective and the scope of
the project.
1.1 Overview of Technologies
Positioning system is a technology that is used in locating and tracking user or
property. Location, defined as coordinates or places either room, street, building and
house. Position, is refer to the distance or location from some area. Positioning,
usually refers to the process of finding the two-or-three-dimensional coordinates of a
terminal but can mean determination of distance or range [1]. A beacon is a
2
continuous or periodic transmission that facilitates timing synchronization or position
measurements between terminals. Terminal refers to the either side of the
communication link.
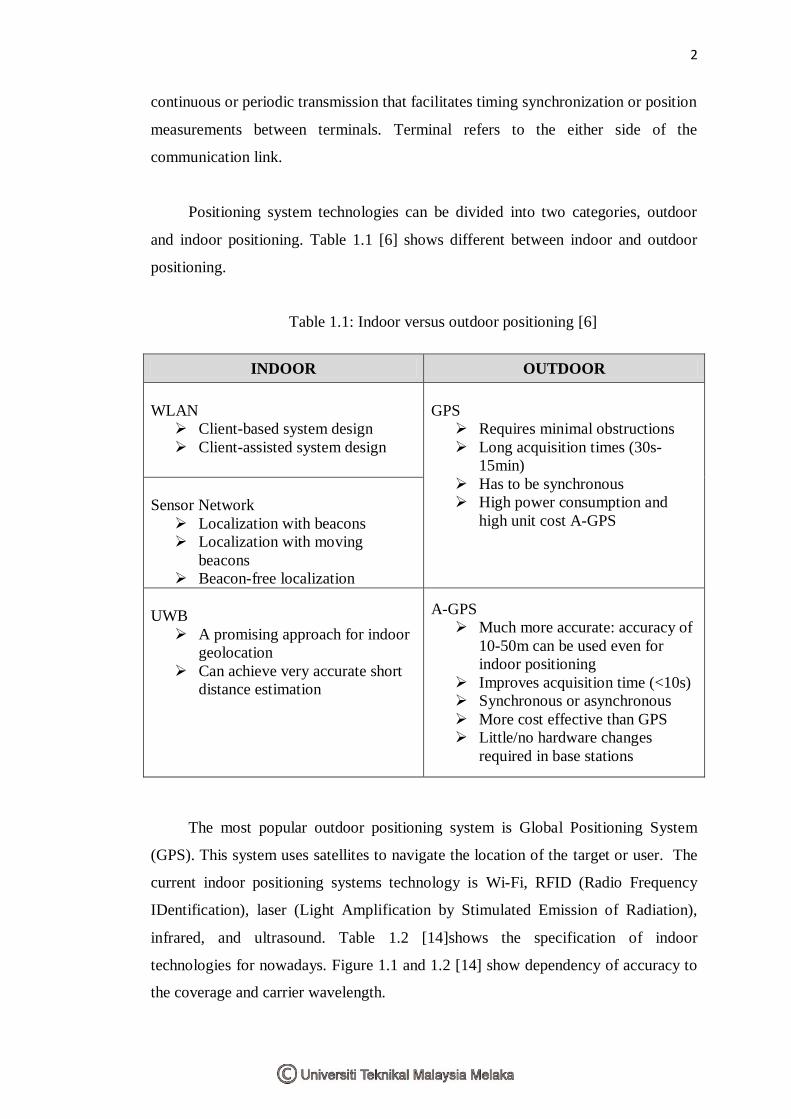
Positioning system technologies can be divided into two categories, outdoor
and indoor positioning. Table 1.1 [6] shows different between indoor and outdoor
positioning.
Table 1.1: Indoor versus outdoor positioning [6]
INDOOR OUTDOOR
WLAN
Client-based system design
Client-assisted system design
GPS
Requires minimal obstructions
Long acquisition times (30s-
15min)
Has to be synchronous
High power consumption and
high unit cost A-GPS
Sensor Network
Localization with beacons
Localization with moving
beacons
Beacon-free localization
UWB
A promising approach for indoor
geolocation
Can achieve very accurate short
distance estimation
A-GPS
Much more accurate: accuracy of
10-50m can be used even for
indoor positioning
Improves acquisition time (<10s)
Synchronous or asynchronous
More cost effective than GPS
Little/no hardware changes
required in base stations
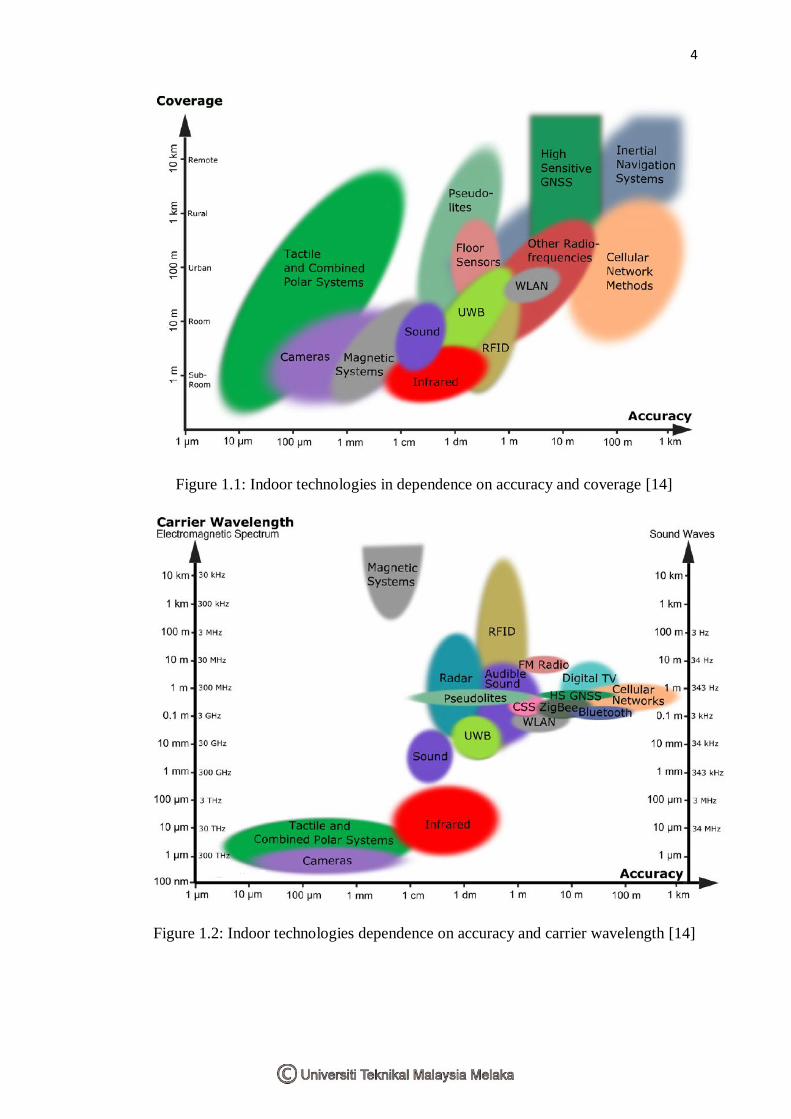
The most popular outdoor positioning system is Global Positioning System
(GPS). This system uses satellites to navigate the location of the target or user. The
current indoor positioning systems technology is Wi-Fi, RFID (Radio Frequency
IDentification), laser (Light Amplification by Stimulated Emission of Radiation),
infrared, and ultrasound. Table 1.2 [14]shows the specification of indoor
technologies for nowadays. Figure 1.1 and 1.2 [14] show dependency of accuracy to
the coverage and carrier wavelength.

3
Table 1.2: Indoor Positioning Technologies [14]
Technology Typical
Accuracy
Typical
Coverage (m)
Typical Measuring
Principle
Typical
Application
Cameras 0.1mm -
dm 1 – 10
Angle
measurements from
images
Metrology,
robot
navigation
Infrared Cm – m 1 - 5 Thermal imaging,
active beacons
People
detection,
tracking
Tactile & Polar
Systems µm – mm 3 – 2000
Mechanical,
interferometry
Automotive,
metrology
Sound cm 2 – 10 Distances from time
of arrival
Hospitals,
tracking
WLAN/Wi-Fi m 20 – 50 Fingerprinting
Pedestrian
navigation,
LBS
RFID dm - m 1 – 50 Proximity detection,
fingerprinting
Pedestrian
navigation
Ultra-
Wideband cm - m 1 – 50
Body reflection,
time of arrival
Robotics,
automation
High Sensitive
GNSS 10 m „global‟
Parallel correlation,
assistant GPS
Location based
services
Pseudolites cm - dm 10 – 1000 Carrier phase
ranging
GNSS
challenged pit
mines
Other Radio
Frequencies m 10 – 1000
Fingerprinting,
proximity
Person
tracking
Inertial
Navigation 1% 10 – 100 Dead reckoning
Pedestrian
navigation
Magnetic
Systems mm – cm 1 – 20
Fingerprinting and
ranging
Hospitals,
mines
Infrastructure
Systems cm - m building
Fingerprinting,
capacitance
Ambient
assisted living
4
Figure 1.1: Indoor technologies in dependence on accuracy and coverage [14]
Figure 1.2: Indoor technologies dependence on accuracy and carrier wavelength [14]

5
1.2 Project Background
WLAN (Wireless Local Area Network), Wi-Fi and IEEE 802.11 all means the
same [5]. It is an industrial standard that used for wireless data transmission. Wi-Fi
used electromagnetic waves in order to transmit data over the airwaves medium.
Obviously, they are not designed and deployed for the purpose of positioning.
However, measurements of received signal strength (RSS) of the signal transmitted
by either access point (AP) imply the location of any mobile user [9].
There are several positioning algorithms that can be used in determining the
current position of user like triangulation, trilateration and scene analysis. From the
RSS, it can be used to compute to determine the location or coordinate of the user.
Figure 1.3: Positioning system block diagram
Figure 1.3 shows the block diagram of the system. There is a vector power
between the user referenceor target to the AP. This vector can be used to determine
the distance by using positioning algorithm that will be discuss in Chapter 2,
literature review. Then, the position or coordinates of the user will display on
MATLAB Graphic User Interface (GUI).
This project using an existing Wi-Fi infrastructure in localizing and positioning
even it was never designed to do so. The coverage area of this project was at Block
B, Ground Floor, FKEKK (Fakulti Kejuruteraan Elektronik dan Kejuruteraan
Komputer) because of the number of APs located there.
6
1.3 Problem Statement
Indoor location sensing systems has become very important and popular in
recent years [3][8]. They, gradually play an important role in all aspects of people‟s
daily lives including e.g. living assistant, navigation, emergency detection,
surveillance or tracking target-of-interest and many other location-based services [4].
Nowadays, WLAN technology can be found in almost every building [5]. It is
because an advancement of technology in developing devices like smartphones
which can directly connected to the internet. Internet has become a daily needs
especially for getting knowledge.
GPS is the most popular positioning system for outdoor environment and
plays a dominant role in localization. It can provide precise locations of mobile
devices within worldwide coverage.
However, GPS has shadow problem and is not available, not operate and not
suitable for indoor environments [9][10][12]. This inefficiency is due to the
weakness of signals emitted and their disability to penetrate most building materials
[4]. It performance deteriorates in indoor use and in urban environments [1].
1.4 Objectives
The main objectives of this project can be summarized as follows:
i. To develop a location and positioning simulation estimation using MATLAB
software at FKEKK, UTeM.
ii. To analyze the performance of location estimation based on fingerprint
technique.
7
1.5 Scope of Project
Development of the Localization and Positioning via Wi-Fi signals have
chosen after doing research from the books, internet, electronic magazine and other
resources due to human demand for indoor positioning system. This project needs no
hardware modification for Wi-Fi infrastructure and no cost required.
Localization and Positioning via Wi-Fi signals is an innovation of locating
and tracking user or property. The scopes of this project require using of hardware
and software for measurement phase and software development for testing phase.
For the first phase of the project development, data collection (offline phase)
has been done at Block B, Ground Floor, FKEKK, UTeM. The process of collecting
data is called surveying phase where at each point need to collect RSS in determining
the distance during online phase. The collected data will used as database for
applying the location estimation algorithm in MATLAB software. After completed
this phase, GUI will be develop to display the current location and position of the
user. Figure 1.4 shows an overall flow chart of the scope of project.
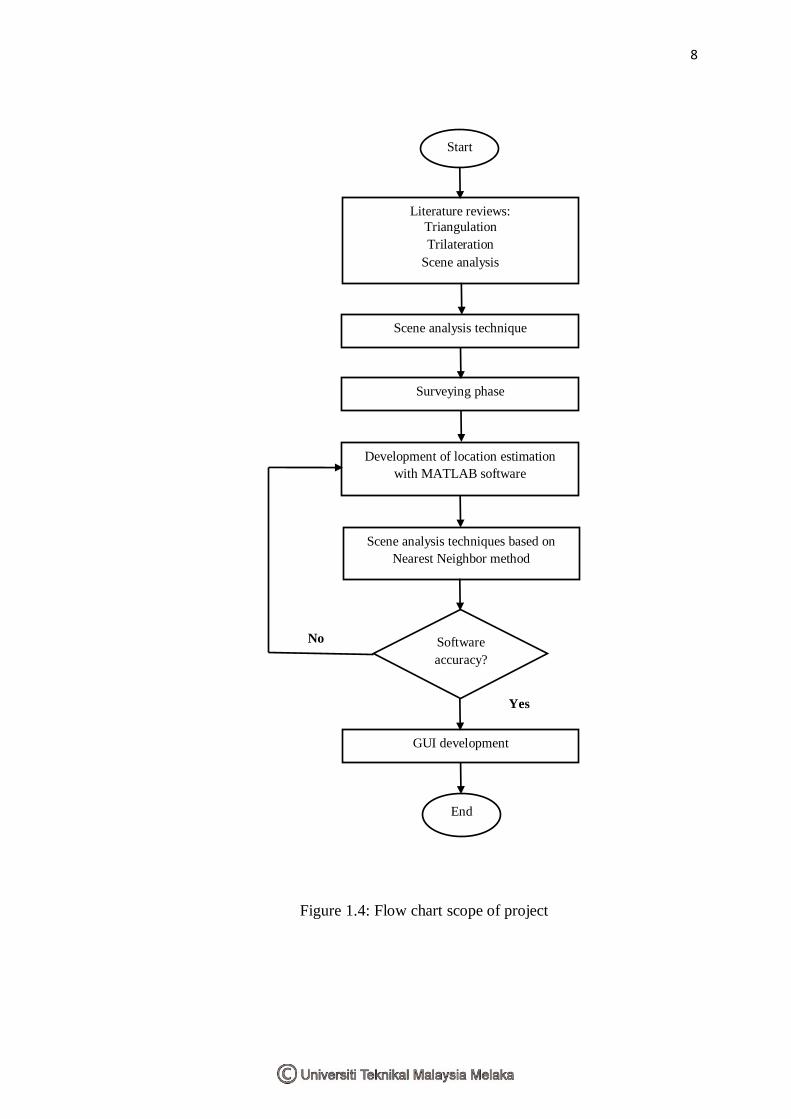
8
Figure 1.4: Flow chart scope of project
End
Start
Surveying phase
Scene analysis technique
Literature reviews:
Triangulation
Trilateration
Scene analysis
GUI development
Software
accuracy?
Yes
No
Scene analysis techniques based on
Nearest Neighbor method
Development of location estimation
with MATLAB software