live human detection . .

of 50
-
Upload
vishnu-nair -
Category
Documents
-
view
214 -
download
0
Transcript of live human detection . .
-
7/28/2019 live human detection . .
1/50
BSTARCT
GSM/GPS Based Live Human Detector
Abstract
Human detection is an essential in some hazardous sectors like boilers, reactors
where only authorized person can enter. The entrance of unauthorized person at
those sectors can cause some mishandling of the system leads to great accidents.
Hence an efficient human motion detection system is needed. Another place where
human detection needed is war fields and places where disaster occured.
Human identity is carried out using a Human live detection sensor. The
PIR sensor is used to detect the motion in any kind and will inform to microcontroller. In this project we are using GSM based wireless system for the efficient
communication. If the micro controller unit receives the detected signal, it will send a
message through GSM modem. The GPS receiver receives the Longitudinal and
latitudinal value when the system detects the movement of the human body it sends
the location details to the stations using GSM modem.
INTRODUCTION
Until well into the twentieth century, most of devices developed for measuring
distance/movements worked on the same principle; comparison of the measured distance
with the standard unit of length .Other advanced means are available now. In this project
we are implementing the detection of any type of minute movements by using a PIR
sensor. Here we are doing the live human detection. In any living body emits heats in the
form of infrared radiations which is detected by the PIR sensor. You will find many uses
for this movement detector. This type of human detection is used in some hazardous
sectors like boilers, reactors where authorized persons can only enter and also used in war
fields etc. Human detection is a essential concept in the industrial sectors. In this project
we are using GSM based wireless system for the efficient communication and to avoid
the unauthorized person involvement in the hazardous areas. The PIR sensor is used to
-
7/28/2019 live human detection . .
2/50
detect the motion in any kind and will inform to micro controller. If the micro controller
unit receives the detected signal, it will send a message through GSM Modem.
This project deals with giving intelligence to the existing security
system. In this the human identity is carried out using a Human live detection
sensor. The unique act as human attributes and can be checked out for
verification. The human live detection sensor is interfaced to the input port of the
microcontroller, which keeps track of the Identification. The GPS device getting
the longitudinal and latitudinal value of the Human place .The GPS receiver
receives the Longitudinal and latitudinal value. This setup acts as Master and
connected to slave system GSM Modem via RS 232 cable.
-
7/28/2019 live human detection . .
3/50
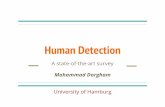
BLOCK DIAGRAM
MICRO
CONTROLLER
POWERSUPPLY
PIR
SENSOR
GPS
RECEIVER
TTL-RS-232TRANSCEIVER
GSM MMODEM
-
7/28/2019 live human detection . .
4/50
BLOCK DIAGRAM DESCRIPTION
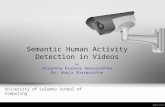
PIR SENSOR
A PIR (passive infrared) detector coupled with an electric light is
now widely used for intruder protection. PIR are also available as stand-alone
units which usually have a switched output for controlling external loads. To
enable the PIR detector to work in daylight also, you have to cover the internal
light/darknes sensor (usually an LDR).The PIR detector used in this circuit reacts
to fast temperature variations caused by the movement of people or animals in an
enclosed space. All mammals radiate a certain amount of heat, and it is this that
causes local variations in temperature. The radiant heat energy occupies the
electromagnetic spectrum between light and radio waves, i.e. 0.74.300m m,which is usually called the infrared region. The radiant energy is picked up by a
Fresnel lens, at the focus of which is a double differential pyroelectric sensor. The
detector is largely unaffected by other electrical radiation. Also, it does not react
to movement outside the guarded.
Passive InfraRed sensors (PIR sensors) are electronic devices
which measure infrared light radiating from objects in the field of view. PIRs are
often used in the construction of PIR-based motion detectors, see below. Apparent
motion is detected when an infrared emitting source with one temperature, such as
a human body, passes in front of a source with another temperature, such as a
wall.
Fig.PIR sensor
-
7/28/2019 live human detection . .
5/50
All objects emit infrared radiation; see black body radiation. This
radiation (energy) is invisible to the human eye but can be detected by electronic
devices designed for such a purpose. The term 'passive' in this instance means the
PIR does not emit any energy of any type but merely sits 'passive' accepting
infrared energy through the front of the sensor, known as the sensor face. At the
core of a PIR is a solid state sensor or set of sensors, with approximately 1/4 inch
square area. The sensor areas are made from a pyroelectric material.
The actual sensor on the chip is made from natural or artificial
pyroelectric materials, usually in the form of a thin film, out of gallium nitride
(GaN), caesium nitrate (CsNO3), polyvinyl fluorides, derivatives of
phenylpyrazine, and cobalt phthalocyanine. (See pyroelectric crystals.) Lithium
tantalate (LiTaO3) is a crystal exhibiting both piezoelectric and pyroelectric
properties.
The sensor is often manufactured as part of an integrated circuit
and may be comprised of one (1), two (2) or four (4) 'pixels' comprised of equal
areas of the pyroelectric material. Pairs of the sensor pixels may be wired as
opposite inputs to a differential amplifier. In such a configuration, the PIR
measurements cancel each other so that the average temperature of the field of
view is removed from the electrical signal; an increase of IR energy across the
entire sensor is self-cancelling and will not trigger the device. This allows the
device to resist false indications of change in the event of being exposed to flashes
of light or field-wide illumination. (Continuous bright light could still saturate the
sensor materials and render the sensor unable to register further information.) At
the same time, this differential arrangement minimizes common-mode
interference; this allows the device to resist triggering due to nearby electric
fields. However, a differential pair of sensors cannot measure temperature in that
configuration and therefore this configuration is specizliaed for motion detectors.
-
7/28/2019 live human detection . .
6/50
WORKING
Human identity is carried out using a Human live detection sensor.
The PIR sensor is used to detect the motion in any kind and will inform to micro
controller. . In this project we are using GSM Modem If the micro controller unit
receives the detected signal, it will send a message through GSM modem. The
GPS receiver receives the Longitudinal and latitudinal value when the system
detects the movement of the human body it sends the location details to the
stations using GSM Modem.
A PIR (passive infrared) detector coupled with an electric light is
now widely used for intruder protection. PIR are also available as stand-aloneunits which usually have a switched output for controlling external loads. To
enable the PIR detector to work in daylight also, you have to cover the internal
light/darknes sensor (usually an LDR).The PIR detector used in this circuit reacts
to fast temperature variations caused by the movement of people or animals in an
enclosed space. All mammals radiate a certain amount of heat, and it is this that
causes local variations in temperature. The radiant heat energy occupies the
electromagnetic spectrum between light and radio waves, i.e. 0.74.300m m,
which is usually called the infrared region. The radiant energy is picked up by a
Fresnel lens, at the focus of which is a double differential pyroelectric sensor. The
detector is largely unaffected by other electrical radiation. Also, it does not react
to movement outside the guarded.
The GPS device getting the longitudinal and latitudinal value of
the Human place .The GPS receiver receives the Longitudinal and latitudinal
value. This setup acts as Master and connected to slave system GSM modem via
RS 232 cable. The Master detects the movement of the human body& place and
sends a signal to slave via data port. Once slave receives the signal it will send a
SMS to the number which is already stored on that. The live body sensor is the
special type of sensor. This sensor has two Elements. Naturally the passive
infrared radiation is the one type of rays, which are always emitting from the live
-
7/28/2019 live human detection . .
7/50
bodies that is human bodies. These rays will be received by the sensor elements.
If there is a variation between the outputs of these elements due to movement the
live body, the difference between the outputs will be amplified by differentiation
amplifier. Then the signal is fed to another amplifier unit in order to amplify the
voltage level. The amplifier unit is constructed by the operational amplifier. Then
the amplified signal is given to micro controller.
The amplified signal is fed to a microcontroller. Here the
microcontroller is the flash type reprogrammable microcontroller in which we
have already programmed. When human bodies in the destroyed building due
bomb blast or earth quack, the sensor senses the radiation signal from the human
bodies; the microcontroller received the signal from the amplifier and activates
the driver circuit for alarm. The driver circuit is constructed with transistor, which
acts as switch to turn ON and turn OFF alarm. Now the alarm makes the sound
for live bodies indication.
The microcontroller circuit is connected with reset circuit, crystal
oscillator circuit,lcd circuit the reset circuit is the one which is an external
interrupt which is designed to reset the program. And the crystal oscillator circuit
is the one used to generate the pulses to microcontroller and it also called as the
heart of the microcontroller here we have used 12mhz crystal which generates
pulses upto 12000000 frequency which is converted into machine cycle frequency
when divided by 12 which is equal to 1000000hz i.e. about 10 lakhs frequency is
generated per second to find the time we have to invert the frequency so that we
get one micro second for the execution of a instruction.
Reset circuitry is used to reset the circuit. It is an input and is
active high (normally low). Upon applying a high pulse to this pin, the
microcontroller will reset and terminate all activities. This is often referred to as a
power on reset. Activating a power-on reset.Will cause all values in the registers
to be lost.Notice that the values of the pc is 0 upon reset, forcing the cpu to fetch
-
7/28/2019 live human detection . .
8/50
the first opcode from ROM memory location 0000. This means that we must
place the first line of source code in rom location 0 because that is where the cpu
wakes up and expects to find the first instruction.
HARDWARE AND SOFTWARE REQUIREMENTS
Hardware requirements:
1. Microcontroller
2. PIR sensor
3. GPS receiver
4. GSM MODEM
5. TTL-RS-232 Transceiver
6. Power supply unit
MICROCONTROLLER
The 8952 architecture consists of these specific features:
o Eight bit CPU with registers A (the accumulator) and B
o Sixteen bit program counter (PC) and Data pointer (DPTR)
o Eight bit program status word (PSW)
o Eight bit stack pointer (SP)
-
7/28/2019 live human detection . .
9/50
o Internal ROM of 8K
o Internal RAM of 28 bytes
o Sixteen input/output pins arranged as two eight-bit ports: P1 &P3
o Two sixteen bit counters T0 & T1
o Full Duplex serial data receiver/transmitter : SBUF
o Control register : TCON, TMOD, SCON, PCON, IT and IR
o Two external and three internal interrupt sources
o Oscillator and clock circuits
The programming model of 1852 is a collection of 8-bit and 16-bit registers and 8-bit
memory locations. These registers and memory locations can be made to operate using
the software instructions that arte incorporated as part of the design. The program
instructions have to do with the control of the registers and data paths that are physically
contained inside the 8951.
Each register, with the exception of the program counter, has an internal 1-byte
address assigned to it. Some registers are both bit addressable and byte addressable.
Software instructions are generally able to specify a register buy its address, its symbolic
name, of both.
All internal operations are synchronized using clock pulses. Pins XTAL 1 &
XTAL 2 are provided for connecting a resonant network to form an oscillator, Typically
a quarts crystal and capacitors are employed as shown in figure. The crystal frequency is
the basic clock frequency of the microcontroller.
The Oscillator formed by the crystal, capacitors, and on-chip inverter generates a
pulse train at the frequency of the crystal. The clock frequency f, establishes the smallest
interval of time within the microcontroller, called the pulse time P. The smallest intervalof time to accomplish any simple instruction, or part of a complex instruction however, is
the machine cycle. The machine cycle itself is made up of sic states. A state is the basic
time interval for discrete operations of the microcontroller such as fetching an opcode
byte, decoding an opcode, executing an opcode, or writing a data byte. Two oscillator
pulses define each state.
-
7/28/2019 live human detection . .
10/50
Program instructions may require one, tow or four machine cycles to be executed,
depending on the type of instruction. Instructions are fetched and executed by the
microcontroller automatically, beginning with the instruction located at ROM memory
address 0000H at the time the microcontroller is first reset.
To calculate the time any particular instruction will take to be executed, find the
number of cycles, C. The time to execute that instruction is then found by multiplying C
by 12 and dividing the product by the crystal frequency.
``T inst = C*12d/Crystal frequency
Program Counter and Data Pointer
The 8951 contains two 16-bit registers. The program counters (PC) and the data
pointer (DPTR). Each is used to hold the address of a byte in memory.
Program instruction bytes are fetched from memory locations in memory that are
addressed by the PC. Program ROM may be on the chip at address 0000H to 07FFGH.
The PC is automatically incremented after every instruction byte is fetched and may
also be altered by certain instruction.
THE DPTR register is made up of two 8-bit registers named DPH, DPL, which
are used to furnish memory addressed for internal code access.
11.1 Timing and control signals
The counters are divided into two 8-bit registers called the timer low (TL0, TL1)
and high (TH0, TH1) bytes. All counter action is controlled by sit states in the timer
mode control register (TMOD), the timer/counter register (TCON), and certain program
instructions.
TMOD is decided entirely to the two timers and can be considered to be two
duplicate 4-bit registers, each of which controls the action of one of the timers. TCON
has control bits and flags for the timers in the upper nibble, and control bits and flags for
the external interrupts in the lower nibble.
Timer counter Interrupts
-
7/28/2019 live human detection . .
11/50
The timer have been included on the chip to relieve the processor of timing and
counting chores, When the program wishes to count a certain number of internal pulses
of external events, a number is placed in one of the counters. The number represents the
maximum count less the desired count, plus 1. The counter increment from the initial
number to the maximum and the roles over to 0 on the final pulse and also sets a timer
flag. The flag condition may be rested by an instruction to tell the program that the count
has been accomplished.
Timing
If counter is programmed to be a timer, it will count the internal clock frequency
of the oscillator divided by 12d. The resultant timer clock is gated to the timer. The bit
TRX in the TCON register must be set 1 (timer run), and the gate bit in the TMOD
register must be 0, or the external pin INTX must be a 1. The counter is configured as a
timer, then the timer pulses are gated to the counter by the bit and gate bit or the external
inputs bits INTX.
Timer Modes of Operation
The timers may operate in any one of the four modes that are determined by the
mode bits, M1 and M0 in the TMOD register.
Timer Mode 0
Setting timer X mode bits to 00b in the TMOD register results in using the THX
register as an 8-bit counter and TLX as 5-bit counter, the pulse input is divided by 32d in
TL so that the TH counts the original oscillator frequency reduced by a total 384d.
Timer Mode 1
-
7/28/2019 live human detection . .
12/50
Mode 1 is similar to mode 0 except TLX is configured as a full 8-bit counter
when the mode bits are set to 01b in the TMOD. The timer flag would be set in 1311
seconds using 6MHz crystal.
Timer Mode 2
Setting the mode bits to 10b in the TMOD configures the timer to use only
the TLX counter as an 8-bit counter, THX is used to hold a value that is loaded into TLX
every time TLX overflows from FFh to 00h. The timer flag is also set when TLX
overflows. This mode exhibits an auto reload feature. TLX will count up from the
number in THX, overflow and be initialized again with the contents of THX.
Timer Mode 3
Timer 0 and 1 may be programmed to be in mode 0, 1 or 2 independently of a
similar mode for the other timer. This is not true mode 3 , the timers do not operate
independently.
If mode 3 is chosen for timer 0 placing timer 1 in mode d caused it to stop
counting, the control bit TR1 and the timer flag TF1 are the used by timer 0.
Timer 0 in mode 3 becomes tow completely separate 8 bit counters TL0 is
controlled by the gate arrangement and sets the timer flag TF0 wherever it overflows
from FFh to 00h. TH0 receives the timer clock (the oscillator divided by twelve) under
the control of TR1 only and sets the TF1 flag when it overflows.
Timer 1 may be still used in modes 0, 1 or 2, while timer 0 is in mode 3 with one
important exception no interrupts will be generated by the timer 1 while timer 0 is using
the TF! Overflow flag. Switching timer 1 to mode 3 will stop it and hold whatever count
is in timer 1. Timer 1 can be used for baud rate generation for the serial port, or any other
mode 0, 1, or 2 functions that does not depend on an interrupt (or any other use of the
TF1 flag) for proper operation.
The only difference between counting and timing is the source of the clock pulsed
to the counter. When used as a timer the clock pulses are sources from the oscillator
-
7/28/2019 live human detection . .
13/50
through the divided by twelve circuit. When used as counter, pin T0 supplies pulses to
counter 0, and pin T1 to counter 1. Changes on the input from high to low between
samples will incr4ement the counter. Each high and low s5ate of the input pulse m7st
th7s be held constant for attest one machine cycle to ensure reliable counting.
RESET
This can be considered as the ultimate interrupt as the program cannot block the
action of the voltage at the RST pin. This type of interrupt is often called non-mask able
interrupt. Unlike other interrupts, the PC is not stored for later program resumption.
Interrupt Control
The IE register holds the programmable bits can enable or disable all the interrupts as
group, or if the group is enabled, each individual interrupt source can be enabled or
disabled. The IP register bits may be set by the program to assign priorities among the
various interrupt sources so that more important interrupts can be serviced first.
DM74LS373 (D Latch and edge triggered flip flop)
The other option is to use a DM74LS374 which is not used as its enable pin is
edge triggered. This chip is used to filter out the multiplexed lower order address data bus
of the microcontroller so as to get an 8 bit address only which is provided to the external
RAM. It consists of 8 D flip flops with an ALE signal to latch the address alone. The first
output control pin is active low and thus grounded. The 11th pin is the enable pin which
has to be high in order to pass or filter in the address only from the microcontroller to be
provided to the external RAM. 74HC373. The ALE of the microcontroller is used for
latching as the pulse arrives. This IC consists of 8D flip-flops given by AD0-AD7 and 8Qoutputs given by A0-A7.Then the latch enable [LE] pin is held high, Q outputs are
latched to D inputs. It also has an output enable pin which is active low and is connected
to the output of the flip-flops. The enable pin is connected to the flip flop directly and is
active high.
-
7/28/2019 live human detection . .
14/50
The second 74HC373 is the display buffer. Here the two outputs are connected to
the header 15 connector which is the LCD display buffer. The latch enable pin is
connected to 74LS14 inverter gate which accepts the write input. Here the latch enable
pin has to be directed opposite to how the other IC pin is working in order to provide the
data from the multiplexed lower order bus of the microcontroller to the LCD display on
the transmitter side used for verification.
NOTE:
To ensure that only one device is connected to the microcontroller at a time the
higher 4 bits of the address is inserted into a 4 input NAND gate and the output of this
NAND is used to enable the decoder or demultiplexer. The same output of the NAND
gate is inverted by inputting into another NAND gate of the same chip and using it to
enable the static external RAM. Thus it makes sure that when the decoder is activated the
external RAM is not activated and vice versa.
When the decoder is activated, the next three bits of the address acts as the select
lines which help to enable either one of the sensor digital inputs into the microcontroller
or helps to act as the enable pin of the LCD connected in the transmitter side.
The setup is managed in a manner that the microcontroller connects either with the
external RAM and address latch or the decoder and demultiplexer attached to the sensor
part of the circuit.
The data read into the microcontroller is moved into the RAM as well as moved
into the SBUF for serial communication and this data is available in the TXD pin of the
microcontroller.
DM 74LS14(Hex Inverter with Schmitt Trigger Inputs)
This device contains six independent gates each of which performs
the logic INVERT function. Each input has hysteretic which increases the noise
immunity and transforms as lowly changing input signal to a fast changing, jitter free
output.
-
7/28/2019 live human detection . .
15/50
DISPLAY SECTION
An 89C52 program must interact with the outside world using input and output
devices that communicate directly with a human being. One of the most common devices
attached to an 89C52 is an LCD display. Some of the most common LCDs connected to
the 89C52 are 16*2 displays. This means 16 characters per line by 2 lines and 20
characters per line by 2 lines, respectively.
The 44780 standard requires 3 control lines as well as either 4 or 8 I/O lines for
the data bus. The used may select whether the LCD is to operate with a 4-bit data bus of
an 8-bit data bus. If a 4-bit data bus is used, the LCD will require a total of 7 data lines (3
control line plus the 4 lines for the data bus). If an 8-bit data bus I used in the LCD will
require a total of 11 data lines (3 control lines plus the 8 lines for the data bus). The three
control lines are referred to as EN, RS, and RW.
The EN line is called Enable. This control line is used to tell the LCD
that you are sending it data. To send data to the LCD, your program should first set this
line high (1) and the set the other two control lines and/or put data on the data bus. When
the other lines are completely ready, bring EN low (0) again. The 1-0 transition tells the
-
7/28/2019 live human detection . .
16/50
44780 to take the data currently found on the other control lines and on the data bus and
to treat it as a command.
The RS line is the Register Select line. When RS is low (0), the data is to be
treated as a command or special instruction (such as clear screen, position, cursor, etc.).
When RS is high (1), the data being sent is text data which should be displayed on the
screen. For example, to display the letter t on the screen you would set RS high/
The RW line is the Read/Write control line. When RW is low(0), the
information on the data bus is being written to the LCD. When RW is high (1
1), the program is effectively querying (or reading) the LCD. Only one instruction (Get
LCD status is a read command. All others are write commandsso RW will almost
always be low.
The display contains tow internal byte-wide registers, one for commands (RS=0)
and the second for characters to be displayed (RS=1). It also contains a user programmed
RAM area (the character RAM) that cab be programmed to generate any desired
character that can be formed using a dot matrix. To distinguish between these two data
areas, the hex command byte 80 will be used to signify that the display RAM address 00h
is chosen
Port 1 is used to furnish the command or data byte, and ports 3.2 to 3.4 furnish
register select (RS) and read or write (R/W) levels.
SERIAL INTERFACE
The MAX 232 is a dual driver/receiver that includes a capacitive voltage generator to
supply EIA-232 voltage levels from a single +5V supply. Each receiver converts EIA
232 inputs to 5 V TTL/CMOS levels. These receivers have a typical threshold of 1.3V
and a typical hysteresis of 0.5 V and can accept 30V inputs. Each driver converts
TTL/CMOS input levels into EIA-232 levels. It can operate up to a speed of 120 kbits per
second. It has two drivers and two receivers. It has a tolerance of 30V input levels. It
has a low supply current of around 8mA. It can be used as a battery powered system,
terminal, modem or a computer.
-
7/28/2019 live human detection . .
17/50
71
-
7/28/2019 live human detection . .
18/50
The micro controller is serially interfaced with the PC, where the PC reads the stored data
from the micro controller. The PC is serially interfaced via its COMPORT with the micro
controller by an RS232 serial data interface.
The MAX 232 contains four sections: dual charge pump DC-DC voltage converters, RS
232 drivers, RS 232 receivers and receiver and transmitter enable control inputs. The
MAX 232 has two internal charge pumps that convert +5V to +10V for RS 232 driver
operation. The first converter uses capacitor C1 to double the +5V input to +10V on C3
-
7/28/2019 live human detection . .
19/50
at the V+ output. The second converter uses capacitor C2 to invert +10V to 10V on C4
at the V- output. A small amount of power may be drawn from the +10V and 10V
outputs to power external circuitry except on MAX 225 and MAX (245-247) where these
pins are not available.
The MAX232 can be used to make both the PC and the micro controller voltage
compatible with each other. This IC can be used to interface the TTL/CMOS I/O lines
with the RS-232 I/O lines.
LCD (HD44780U)
An LCD is a common device which is used almost every day they are all around in
laptop computers ,digital clocks & watches, microwave ovens ,Cd players 7 many other
electronic devices.LCDs are common because they offer some real advantages over other
display technologies. They are thinner & lighter&draw much less power than CRTs.
There is an underlying technology that makes LCDs work. The strange
characteristics of liquid crystals have been used to create a new kind of shutter & grids of
these tiny shutters open & close to make patterns that represent numbers words or images
.
-
7/28/2019 live human detection . .
20/50
The HD44780U dot matrix LCD controller and driver LSI displays alpha
numerics, Japanese kana charas & symbols. It can be configured to drive a dot matrix
liquid crystal display under the control of a 4 or 8 bit p.Since all the functions such as
display RAM, character generator & liquid crystal driver, required 4 driving a dot matrix
LCD s are internally provided on one chip, a minimal system can be interfaced with this
controller or driver. A single HD44780U can display up to one 8 character line or two 8
character line. The HD44780U has pin function compatibility with the HD 44780U
which allows the user to easily replace an LCD II with an HD44780U.HD44780U
character generator ROM is extended to generate 20858 dot character fonts &325 10
dot
character fonts for a total of 240 different character fonts. The low power supply (2.7V-
5.5V) of the HD 44780U is suitable for any portable battery driven product requiring low
power dissipation.
LIQUID CRYSTALS
There are some substances that can exist in an odd state i.e. sort of like a liquid and sort
of like a solid .when they are in this state there molecules tend to maintain their
orientation ,like the molecules in a solid ,but also move around to different positions like
the molecules in a liquid. This means that the liquid crystals are neither solid nor liquids.NEMATIC PHASE LIQUID CRYSTAL
Just as there are many verities of solids and liquids there is also a variety of liquid
crystal substances. Depending on the temperature & the particular nature of substance
liquid crystals can be in one of the several distinct phases. Liquid crystals in the nematic
phase are the liquid crystals that make LCDs possible.
One feature of liquid crystals is that they are affected by electric current. Particular
sort of nematic liquid crystal, called twisted nematics (TN), is naturally twisted. Applying
an electric current to these liquid crystals will untwist them to varying degrees, depending
on the currents voltage.LCDs use these liquid crystals because they react predictably to
electric current in such away as to control light passage creating an LCD.there is far more
to building an LCD than simply creating a sheet of liquid crystals .
-
7/28/2019 live human detection . .
21/50
ACTIVE AND PASSIVE COMPONENTS
The other miscellaneous components used in the circuit include the passive components
such as resistors, capacitance and active components such as LED, diodes etc. The
passive components by themselves are not capable of amplifying or processing electrical
signals. They conduct current in both directions. They are explained below and are used
in our circuit as the external component to provide different functions.
RESISTORS
Resistor is an electronic component with a specified amount of resistance. Resistors
allow current conduction in either direction. They are used to control the flow of current
and to provide desired amount of voltage in the circuit. The resistance value is normally
marked on the resistor in codes using standard color bands. Tolerance is the allowed
variation of resistance value from the normal value. Value of resistors are generally
available in the market ranges from several mega ohms with tolerance of 5%, 10% and
20%.In this circuit we are using fixed resistors whose value does not change at all
CAPACITOR
A capacitor is a passive electronic circuit element. Basically capacitor consists of two
metals plates kept apart by an insulating material between the plates. It is used to store
and release charge when required. Capacitance is the measure of the strength of the
electric field surrounding the conductor. Capacitance is defined as the property of
capacitor, when opposes the sudden changes in the applied voltage. Capacitance is
measured in Farads. Capacitance can be used to change AC into stored DC like in
battery. The stored electric energy can be used to drive the operation of electric devices.
-
7/28/2019 live human detection . .
22/50
In this project ceramic and electrolytic capacitors are used for filtering and triggering
circuit for the oscillators and part of the power supply.
DIODES
Semiconductor diode is also called a P-N junction diode. It conducts current in
one direction only and is utilized in rectifiers. The P-N junction is encapsulated in plastic,
taking 2 leads out for circuit connection. The lead attached to the P-type is called the
anode and to N-type is called cathode. The diodes are operated in two modes- forward
biased and reverse biased. In this circuit, 1N4001 & 1N4007 are used.
CRYSTAL
For an exceptionally high degree of frequency stability, crystal oscillators are used. The
crystal generally used is a finely grounded water of translucent quartz (or tourmaline)
stone held between two metal plates and housed in a package of about the size of a postal
stamp. The crystal wafers are cut from the crude quartz.
The method of cutting determines the crystals natural resonant frequency and its
temperature coefficient. When the wafer is cut so that its flat surfaces are perpendicular
to its electrical axis, it is called an X-cut crystal. But if the wafer is cut so that its flat
surfaces are perpendicular to its mechanical axis, it is called Y-cut crystal.
The quartz crystal has certain properties. When mechanical stress is applied
across its two opposite phases, a potential difference is developed across them. It is called
piezo electrical effect. Conversely, when a potential difference is applied cross a crystal it
either expands or contract.
If an alternating voltage is applied, the crystal wafer is set into vibrations. The
frequency of vibration is equal to the resonant frequency of the crystal.
-
7/28/2019 live human detection . .
23/50
POWER SUPPLY CIRCUIT WITH BATTERY BACKUP
The circuit consist of step-down transformer, rectifier filter, regulator and
protection circuit .Step down transformer(230/6v,500mA) is used for reducing the supply
voltage from 230v to 6v.The 230v AC is directly given to transformer through a switch
(s1).This switch is used for switching the main supply .The o/p of the transformer will get
6v AC. That voltage is given to the bridge rectifier and it consists of four diodes. During
the + ve half cycle (d1&d3) will conduct and in the vet half cycle diodes (d2&d3) will
conduct. O/P of the rectifier will be pulsating DC for getting a pure DC output it requires
a filter circuit.
Here capacitor C1 will act as a filter. So the O/P of the capacitor will be almost pure DC.
For better performance of the circuit it requires a constant 5vDC.Ic7805 will act as a
regulator. It is having 3 pin, in that the first pin as the filter O/P & the second pin is a
common point. O/P will get from the third pin. This O/P will be constant 5v DC. When a
+5v is enter the battery will charge through Diode D5, R3.The same time D6 also will
conduct and we will get clear O/P. When I/P power are off battery will provide thesupply and D7 will conduct and we can get the o/p. capacitor C will maintain the constant
voltage across load. Switch S2 is used for switching the O/P DC voltage. Whenever the
switch is in on condition LED will blink and it will show the O/P power is available.
-
7/28/2019 live human detection . .
24/50
TRANSFORMER:
The transformers are used to increase or decrease the amplitude of an ac voltage, keeping
the frequency constant. It works on the principle of mutual conduction. A transformer
consists of two inductive coils, which are electrically separated but magnetically linked
through path of low inductance, and these coils are primary coil and secondary coil. The
two coils posses high mutual inductance. Transformers can be used t o step up or step
down. In the step up transformer, the ac voltage signal feed across the primary will get set
up in the secondary of the transformer. In step down transformer the voltage in the
primary will get reduced in the secondary of the transformer.
In the step up transformer, the number of turns of the primary is less than that of the
secondary coil of the transformer. In the step down transformer the no. of turns in the
primary coil is greater than that of the secondary coil of the transformer. The output
voltage and current of the transformer depend on the number of turns in the primary and
secondary coils and the area of cross section of the copper wire used. The primary and
secondary windings are placed in a core.
The transformer used in our project is 0- 12V AC 1 Amps. 1 Amp 12V transformer is
selected because the maximum current flowing through the circuit is less than 1 Amp.
RECTIFIER:
The main function of a diode in the rectifier circuit is to convert the AC to rippled DC.
When AC input voltage is to be rectified it is first given to the transformer and its output
is fed to the series connected diode and load RL. The output is obtained across the load.
-
7/28/2019 live human detection . .
25/50
This can be explained in such a way that during the positive half cycle of the ac input
voltage the diode is reversed biased and it will not conduct. So during the positive half
cycle of the ac input voltage, there is output across the load and during the negative half
cycle of the input, there is no output across the load.
The rectifier used in our project is full wave rectifier
Full wave rectifier:
In a full wave rectifier we utilize both the half cycles of the AC input voltage. Alternate
half cycles of the input AC voltage are inverted t give a unidirectional load current.
Full wave bridge rectifier requires 4 diodes for its operation and it avoids the need for the
centre- tapped transformer.
During the positive half cycle of the secondary voltage, the diodes D2 and D4 are
conducting and the diodes D1 and D3 are non- conducting. Therefore current flows
through the secondary winding D2, load resistance Rl and the diode D. During the
negative half cycle of the secondary voltage D1 and D3 conducts and the diodes D2 and
D4 do not conduct. The current therefore flows through the secondary winding diode D1
and D3. Load resistor Rl. In both the cases current passes through the load resistor in the
same direction. Therefore a fluctuating unidirectional voltage is developed across the
load. Rectification efficiency of the circuit is 81.2%.
The diodes used here in our project for the rectification purpose is 1N4007.
CAPACITOR:
A capacitor is a passive electronic circuit element. Basically capacitors consist of two
metal plates kept apart by an insulating material between the plates. It is used to store and
release charge when required. Capacitance is the measure of the strength of the electric
-
7/28/2019 live human detection . .
26/50
field surrounding the conductor. When a battery is connected across the capacitor it gets
charged. Capacitance is defined as the property of capacitor, which opposes the sudden
changes in the applied voltage. Capacitance is measured in Farads (F). Capacitors can be
used to change alternating voltage(AC) into stored DC like in battery. The stored
electrical energy can be used to drive the operation of electrical devices. In this project
ceramic and electrolytic capacitors are used for filtering and triggering circuit for the
oscillators and part of the power supply.
Capacitor filter:
Capacitor filter consists of a capacitor placed across the rectifier output in parallel with
the load R. the pulsating Dc voltage increases it changes the capacitor and also supplies
current to the load. At the end of the quarter cycle, the capacitor gets changed to the peak
value Vm of the rectifier voltage. Now the rectifier voltage starts to decrease. As this
occurs the capacitor discharges through the load and voltage across the capacitor
decreases. The voltage across the load will decrease only slightly because the next
voltage peak comes and recharges the capacitor. This process is repeated again and again.
If we observe the output it may be seen that very little ripple is left in the output. A much
steadier voltage can be obtained if the capacitor of large value is used. Capacitor filter is
popular because of its low cost, small size and good characteristics. In our project the
value of the capacitor is 2200 micro farad.
REGULATORS:
-
7/28/2019 live human detection . .
27/50
The LM 78XX series of three terminal regulators is available with several fixed output
voltages making them useful in a number of applications. One of these is local on- card
regulation, eliminating the distribution problems associated with single point regulation.
The voltages available allow these regulators to be used in logic systems,
instrumentation, WiFi, and other solid- state electronic equipment. Although designed
primarily as fixed voltage regulators, these devices can be used with external components
to obtain adjustable voltages and currents.
In an unregulated power supply, the output voltage changes whenever input supply
voltage or load resistance changes. It is never constant. The change in voltage from no
load to full load condition is called voltage regulation. The aim of a voltage regulated
circuit is to reduce these variations to zero or at least to the minimum possible value.
Voltage regulators comprise a class of widely used ICs. Regulator IC unit contain the
circuitry. For reference source, comparator amplifier, control device, and overload
protection all in a single IC. Although the internal construction of the IC is somewhat
different from that described for discrete voltage regulator circuits, the external operation
is much the same. IC units provide regulation of a fixed negative voltage or an adjustably
set voltage.
The regulators can be selected for operation with load currents from hundreds of milli
amperes to tens of amperes, corresponding to power ratings from milli watts to tens of
watts.
The fixed voltage regulator has an unregulated DC input voltage, Vi, applied to one of
the input terminal, a regulated output DC voltage Vo, from a second terminal, with the
third terminal connected to the ground. For a selected regulators, IC device specifications
-
7/28/2019 live human detection . .
28/50
list a voltage range over which the input voltage can vary to maintain a regulated output
voltage over a range of load current. The specification also lists the amount of output
voltage change resulting from a change in load current (load regulation) or input voltage
(line regulation).
Fixed positive voltage regulators:
The LM 78XX series is available in an aluminum TO-3 package, which allow over 1.0A
load current if adequate heat sinking is provided. Current limiting is included to limit the
peak output current to a safe value. Safe area protection for the output transistor is
provided to limit internal power dissipation. If internal power dissipation becomes too
high for the heat sinking provided, the thermal shutdown tales over preventing the IC
from overheating.
The series 78 regulators provide fixed regulated voltages from +5 to +24V. These ICs
are3designed as fixed voltage regulators and with adequate heat sinking can deliver
output currents in excess of 1A. Although these devices do not rewrite external
components, such components can be used to obtain adjustable voltages and currents.
These ICs also have internal thermal overload protection and internal short- circuit
current limiting.
These are a three- terminal voltage regulator, which has three terminals: input (Vin),
output (Vo) and a ground terminal. Since the regulator operates at a preset value, the
current limiting resistor is also internal to the device.
The main advantages of three- terminal regulators are:
Simplicity of connections to the external circuit and
Minimum of external components (in some cases no external components are required).
-
7/28/2019 live human detection . .
29/50
The capacitor, Cin, at the input side is required only when the voltage regulator is locate
more than about 5 cm from the load inductance between the supply and the regulator may
cause stability problems and high frequency oscillations. This capacitor should have low
effective series resistance. Acceptable values are generally 0.2 MF ceramic disk, 2MF or
greater or 25 MF or greater aluminium electrolytic.
The output capacitor Co may not be needed. However, this improves the regulator
response to transient changes in the load conditions. This capacitor also reduces the noise
present at regulator output.
MICROCONTROLLER PROGRAMMING PARTOnce the PCB board is manufactured and then various components are placed
accordingly and soldered with precision in the next step the the microcontroller used in
the circuit has to be programmed based on the specifications needed or provided by the
designer. This programming is done after a clear flowchart and an algorithm has been
created regarding various steps that must be done by the microcontroller in order to
enable the proper functioning of the circuit. This process must be done for both the
transmitter and the receiver side so that both work simultaneously with sync and hence
enable the proper transmission of the data from the transmitter side to the receiver side
and thus completing the wireless transmission part of the data. This data available in the
receiver side is compared with a reference value so as to decide the working of a relay
that is connected to the circuit that controls the process going on in the transmitter side.
Programming part of the microcontroller on both sides
The program typed in by the user is an assembly level language which cannot be
directly entered into the microcontroller. This assembly level program has to be
converted into a HEX file which helps in the working of the microcontroller. The
software used for this conversion is KEIL software which changes the HEX file format
into a one that is accepted by the microcontroller of the users choice. Selecting the type
of microcontroller in the beginning as the software is opened helps in loading the header
files. The assembly level program has to be rebuilt into a target file which has no errors.
-
7/28/2019 live human detection . .
30/50
If errors are present, they can be found in the listing file created by the compiler and then
corrected and rebuilt again.
An .m extension file tells various memory locations of labels and each line. It also
tells the amount of memory space used by the program
An .obj extension file provides opcodes of the program
The IC is placed in the IC holder of the programmer. The software used for
microcontroller programming is DATA I/O. Before downloading the HEX file the
memory of the chip has to be erased. Later the created HEX file is downloaded into the
chip. Based on the users choice the lock bits of the microcontroller can be set to prevent
piracy or to provide security. The flash programming is also enabled in the
microcontroller. Thus the microcontroller is programmed.
Keil C compiler
Keil development tools for the 8051 Microcontroller Architecture support every level of
software developer from the professional applications engineer to the student just
learning about embedded software development. The industry-standard Keil C
Compilers, Macro Assemblers, Debuggers, Real-time Kernels, Single-board Computers,
and Emulators support all 8051 derivatives and help you get your projects completed on
schedule. The Keil 8051 Development Tools are designed to solve the complex
problems facing embedded software developers.
PROGRAMMING LANGUAGE
Assembly language unlike the high level language programming is tied very closely to
the physical makeup of the processing chip. Assembly language is usually written in
instruction mnemonics that have been invented by the processing chip manufacturer.
-
7/28/2019 live human detection . .
31/50
Once a program has been written in mnemonics, it is translated into machine language by
a process known as assembling the program.
Reasons for selecting assembly language
Increase the speed of execution
To reduce the size of the program
Instruction set used: 89C52 instruction set
Assembler: 89C52 assembler
Source code: Assembly Language Program
Machine code: HEX File
Source code which contains source program is written in mnemonics i.e., assembly
language syntax, 8952 Assembler Package is used for editing and compiling. After
compilation we get the HEX file that contains the corresponding machine code of the
program.
INTRODUCTION TO PCB
PCB DESIGN PROCESS:
Layout design
This is the first step of PCB fabrication. The following has to be known before
starting to prepare the layout:
Physical component size, pin configuration IC and transistors, preferable PCB size, PCB
mounting method, connection termination methods and circuit function details as
maximum current and operating frequency.
-
7/28/2019 live human detection . .
32/50
Layout scale
This is selected based on the accuracy needed which can be 1:1 or 2:1 or 4:1. First
the layout is prepared on a larger scale for better precision of the circuit and then the
scale is reduced photographically. The sheet on which the layout is prepared is like a grid
or graph sheet.
PCB size:
Formula: A=K.(H+C)
Where A: area of PCB K: constant density factor=1.72 to 2
H: hardware area
C: component area
Classification of PCB boards
Boards are classified as single side PCB and double side boards.
Single side PCB boards
They are used most in entertainment electronics as the cost of manufacturing is
less. They have their print or track on only one side while the components are placed on
the other side only. Thus in order to provide a cross connection it has to be done on the
other side. It is mostly used in less complex circuit with fewer components. For more
complex circuits double side PCB preferred.
Double side PCB board
They have print on both the sides of the PCB. The size of the board is
proportional to the size of the circuit. It is usually seen that similar direction connection
are on one side while the connection that have a chance of shorting are printed on the
other side. It can be of two types. a) With plated through holes (expensive) b) without
plated through holes.
LAYOUT PROCEDURE
Make a component layout based on the component view. Then place larger
components first and fill in the gap with smaller components. The layout has to be
prepared along with the signal flow. Input and output connection components on edge of
PCB. Circuit divided to subunits with specified purposes and it should be taken care that
-
7/28/2019 live human detection . .
33/50
the spacing is uniform. When power devices are installed on the PCB heat sink along
with proper air circulation must be provided.
Layout design rule for analog PCB
All the components are mounted on one side of the PCB. Minimum spacing
between each component and component and PCB edge specification must be met.
Heavy component should be provided with additional support. Mounting of variable
passive components have to be done in such a way that adjustment of screws is made
easy. Pin configurations, polarity, ground and power supply connections to be correct.
The provisions of connections given to areas outside the board must be done along the
edge of the PCB.
Layout procedure
First a PCB layout has to be prepared from the component side with the clear
circuit diagram in mind. The larger components are to be placed first while the smaller
ones are filled into the gap. It is to be noted that components with input or output
connections should be placed near the connector. The components have to be placed in a
manner that desoldering one component does not affect the nearby component. For ease
the circuit has to be divided to sub units which have a predefined portion on the board. A
rough circuit is enough for a network operator or designer to produce a layout.
Connection pattern size and shape
The track line between two pads should be as less as possible with a minimum
allowed length of 230 mm. The ratio of pad width to track width has to be decreased in
order to provide a good solder joint.
Solderable pads
Minimum size of the pads depend on the hole size.
Pad diameter= hole diameter + (2*annular ring width) + production tolerance (0.5mm)
Hole diameter= Lead diameter + 0.5 mm
Annular ring width= 0.25mm for hole and less than 0.75mm diameter for the rest
Standard ration of signal line: power line: ground line=1:1.5:2
PCB FABRICATION
-
7/28/2019 live human detection . .
34/50
The size and type of the PCB used depends on the type of IC used in the circuit as
well as the conductor length and spacing between the signal conductors which helps to
know the optical wave impedance of the conductor line. This in turn helps to know the
minimum delay for the rising or falling time of a digital pulse in the circuit.
PCB manufacturing process
The circuit can be drawn on paper to modify or can be drawn on a plain copper
coated board which can be phenolic or glass epoxy (in computer chips).
Board cleaning
The base board has to be cleaned before any procedure is performed. Insufficient
cleaning might lead to difficulties in fabrication such as photo resist adhesion, uneven
photo resist film in pin holes and poor plating adhesion. They can be cleaned manually or
using machines. It requires a sink with running water, pumice powder, scrubbing brush
and a suitable tank.
Screen printing
Used for large production schemes with more than 100 PCBs. Photo printing
transfers the screen pattern to the board surface. It has the capability to produce fine
tracks with less error and high reliability. The screen is stretched and put over the board
or frame and this circuit pattern in transferred photographically. Thus on the screen the
pattern appears as open pores while rest remains closed. When printing copper is
squeezed through the open pores to the board surface and form the pattern.
Etching
It can be done manually or mechanically. The board is immersed in a solution of
formic chloride and hydrochloric acid and then cleaned with soap. It is mainly done in all
subtractive PCB processes. First the etch resist is applied all over the surface and then it
is selectively remove from areas where the print was not there. It is a tough process in the
case of production of fine and precise PCB boards. It is done to remove unwanted copper
from the processed board. Etching agents or etching solution or etchants are used to this
process. Ferric chloride, cupric chloride, ammonium per sulphate acts as etching agents.
The reagents in granular form are diluted and used as it is cheaper.
-
7/28/2019 live human detection . .
35/50
Component placing
During routing interconnections it is difficult to place components based on the
layout design. In high sensitive circuits the critical components are placed first so that
critical conductors require minimum length. In less circuit components are placed based
on signal flow order so that the overall conductor length is minimized. In circuits with
less components and more connections the key components are placed first and the
remaining are placed later. The design is made to have minimum length for the
interconnections. Axial components are placed along the edge of the PCB to prevent
stress at the solder joint.
Drilling
It is done to provide mounting holes for various components using machines.
Plated through holes need superior high speed drilling machines which are expensive, but
these machines are used by all professional PCB manufacturers. It has become tough due
to component miniaturization. Hole sizes are specified in the layout based on the
component lead diameter.
Soldering
The process done in order to join metal parts with the help of molten metal
(solder).The temperature to melt solder is set below the melting point of the metal leads.
The solder wets and alloys with the base material and then by capillary action it is sucked
into the gap between the metal lead and the board. This forms the metallurgical bond
between the joint parts. Before soldering the position at which the joint has to be soldered
must be fixed. The surface must be wet with molten solder and the solder must be
allowed to cool down and solidify. When soldering an auxiliary medium called FLUX is
used in order to increase the wetting and the flow property of the solder. Different
methods are there for soldering: iron soldering, torch soldering, mass soldering, electrical
soldering, furnace soldering etc. Soldered joints affect the performance and the reliabilityof the circuit. It is taken care that the leads are cut before soldering to protect or cover it
and thus preventing rusting. The soldered PCB might have many contaminants that have
to be cleaned as it has a drastic effect on the functioning of the circuit.
-
7/28/2019 live human detection . .
36/50
Properties of flux
It provides a liquid cover over the materials and also provides air in order to let
the solder cool down. It should be able to dissolve the oxides on the metal surface andcarry unwanted elements away. It should remove complete residues after soldering.
Corrosion resistant coating
If the board is unprotected there is high chance of formation of copper oxide over
the board which might affect the performance of the board. This is prevented by aninsulator coating or varnish.
Cleaning
The surface of the board might have oxides, greases and oil. These have to be
removed by this process. First it has to be cleaned with cotton wool soaked in
trichloroethylene. Then it has to be dipped in 10% HCL solution at room temperature and
then scrubbed with powder. Rinse with chlorine free water. If the wetting on the surface
is uniform it has been cleaned well.
Thus above explanations provide a detailed explanation of how layout is prepared
and the PCB board is manufactured industrially.
INTRODUCTION
-
7/28/2019 live human detection . .
37/50
The global Positioning System is the most reliable navigation system presently
available. The navigation data provided by the system is highly accurate and this data is
used for the display purpose. Atmel 89C52 is one of the most component micro controller
chips available in the market today. The flexibility in addressing the memory locations
and the enhanced instruction set enables the processor to perform complicated operations.
Atmel 89C52 is one of the most competent microcontroller chips available in market
today. The flexibility in addressing the memory locations and the enhanced instruction
set enables the processor to perform complicated operations. The advantage of both these
has been optimally combined for the development and implementation of our project.
GLOBAL POSITIONING SYSTEM
The Global Positioning System (GPS) is a world wide radio-navigation system
formed from a constellation of 24 satellites and their ground stations. GPS uses these
manmade stars as reference points to calculate positions accurate to a matter of meters.
In fact, with advanced forms of GPS measurements up to a centimeter can be made. In a
sense it is like giving every square meter on the planet q unique address. GPS receivers
have peen miniaturized to just a few integrated circuits and so are becoming veryeconomical. And that makes the technology accessible to virtually everyone. These days
GPS is finding its way into cars, boats, planes, construction equipment, movie making
gear, farm machinery, even laptop computers.
Heres how GPS works in five logical steps:
o The basis of GPS is Triangulation from satellites.
o To Triangulate a GIS received measures distance using travel time of signals.
o To measure travel time GPS needs very accurate timing.(Atomic clock)
o Along with distance, the exact location of the satellites in space need to be known.
o Finally any delays the signal experiences as it travels through the atmosphere
should be corrected.
-
7/28/2019 live human detection . .
38/50
GPS is funded by and controlled by the U. S. Department of Defense (DOD).
While there are many thousands of civil users of GPS world-wide, the system was
designed for and is operated by the U. S. military. GPS provides specially coded satellite
signals that can be processed in a GPS receiver, enabling the receiver to compute
position, velocity and time. Four GPS satellite signals are used to compute positions in
three dimensions and the time offset in the receiver clock.
Space Segment
The Space Segment of the system consists of the GPS satellites. These space
vehicles (SVs) send radio signals from space. The nominal GPS Operational
Constellation consists of 24 satellites that orbit the earth in 12 hours. There are often
more than 24 operational satellites as new ones are launched to replace older satellites.
The satellite orbits repeat almost the same ground track (as the earth turns beneath them)
once each day. The orbit altitude is such that the satellites repeat the same track and
configuration over any point approximately each 24 hours (4 minutes earlier each day).
There are six orbital planes (with nominally four SVs in each), equally spaced (60
degrees apart), and inclined at about fifty-five degrees with respect to the equatorial
plane. This constellation provides the user with between five and eight SVs visible from
any point on the earth.
1.2 Control Segment
The Control Segment consists of a system of tracking stations located around the
world. The Master Control facility is located at Schriever Air Force Base (formerly
Falcon AFB) in Colorado. These monitor stations measure signals from the SVs which
are incorporated into orbital models for each satellites. The models compute precise
orbital data (ephemeris) and SV clock corrections for each satellite. The Master Controlstation uploads ephemeris and clock data to the SVs. The SVs then send subsets of the
orbital ephemeris data to GPS receivers over radio signals.
-
7/28/2019 live human detection . .
39/50
1.3 User Segment
The GPS User Segment consists of the GPS receivers and the user community.
GPS receivers convert SV signals into position, velocity, and time estimates. Four
satellites are required to compute the four dimensions of X, Y, Z (position) and Time.
GPS receivers are used for navigation, positioning, time dissemination, and other
research. Navigation in three dimensions is the primary function of GPS. Navigation
receivers are made for aircraft, ships, ground vehicles, and for hand carrying by
individuals. Precise positioning is possible using GPS receivers at reference locations
providing corrections and relative positioning data for remote receivers. Surveying,
geodetic control, and plate tectonic studies are examples. Time and frequency
dissemination, based on the precise clocks on board the SVs and controlled by the
monitor stations, is another use for GPS. Astronomical observatories,
telecommunications facilities, and laboratory standards can be set to precise time signals
or controlled to accurate frequencies by special purpose GPS receivers. Research projects
have used GPS signals to measure atmospheric parameters.
2. STANDARD POSITIONING SERVICE (SPS)
Civil users worldwide use the SPS without charge or restrictions. Most receivers
are capable of receiving and using the SPS signal. The SPS accuracy is intentionally
degraded by the DOD by the use of Selective Availability.
SPS Predictable Accuracy
o 100 meter horizontal accuracy
o 156 meter vertical accuracy
o 340 nanoseconds time accuracy
These GPS accuracy figures are from the 1999 Federal Radio navigation Plan. The
figures are 95% accuracies, and express the value of two standard deviations of radial
error from the actual antenna position to an ensemble of position estimates made under
specified satellite elevation angle (five degrees) and less than six conditions. For
-
7/28/2019 live human detection . .
40/50
horizontal accuracy figures 95% is the equivalent of 2drms (two-distance root-mean-
squared), or twice the radial error standard deviation. For vertical and time errors 95% is
the value of two-standard deviations of vertical error or time error. Receiver
manufacturers may use other accuracy measures. Root-mean-square (RMS) error is the
value of one standard deviation (68%) of the error in one, two or three dimensions.
Circular Error Probable (CEP) is the value of the radius of a circle, centered at the actual
position that contains 50% of the position estimates. Spherical Error Probable (SEP) is
the spherical equivalent of CEP, that is the radius of a sphere, centered at the actual
position, that contains 50% of the three dimension position estimates. As opposed to
2drms, drms, or RMS figures, CEP and SEP are not affected by large blunder errors
making them an overly optimistic accuracy measure. Some receiver specification sheets
list horizontal accuracy in RMS or CEP and without Selective Availability, making those
receivers appear more accurate than those specified by more responsible vendors using
more conservative error measures.
3. GPS SATELLITE SIGNALS
The SVs transmit two microwave carrier signals. The L1 frequency (1575.42
MHz) carries the navigation message and the SPS code signals. The L2 frequency
(1227.60 MHz) is used to measure the ionosphere delay by PPS equipped receivers.
Three binary codes shift the L1 and/or L2 carrier phase. The C/A Code (Coarse
Acquisition) modulates the L1 carrier phase. The C/A code is a repeating 1 MHz Pseudo
Random Noise (PRN) Code. This noise-like code modulates the L1 carrier signal,
spreading the spectrum over a 1 MHz bandwidth. The C/A code repeats every 1023 bits
(one millisecond). There is a different C/A code PRN for each SV. GPS satellites are
often identified by their PRN number, the unique identifier for each pseudo-random-noise
code. The C/A code that modulates the L1 carrier is the basis for the civil SPS. The P-Code (Precise) modulates both the L1 and L2 carrier phases. The P-Code is a very long
(seven days) 10 MHz PRN code. In the Anti-Spoofing (AS) mode of operation, the P-
Code is encrypted into the Y-Code. The encrypted Y-Code requires a classified AS
Module for each receiver channel and is for use only by authorized users with
cryptographic keys. The P (Y)-Code is the basis for the PPS. The Navigation Message
-
7/28/2019 live human detection . .
41/50
also modulates the L1-C/A code signal. The Navigation Message is a 50 Hz signal
consisting of data bits that describe the GPS satellite orbits, clock corrections, and other
system parameters.
4. GPS DATA
The GPS Navigation Message consists of time-tagged data bits marking the time
of transmission of each subframe at the time they are transmitted by the SV. A data bit
frame consists of 1500 bits divided into five 300-bit subframes. A data frame is
transmitted every thirty seconds. Three six-second subframes contain orbital and clock
data. SV Clock corrections are sent in subframe one and precise SV orbital data sets
(ephemeris data parameters) for the transmitting SV are sent in subframes two and three.
Subframes four and five are used to transmit different pages of system data. An entire set
of twenty-five frames (125 subframes) makes up the complete Navigation Message that is
sent over a 12.5 minute period. Data frames (1500 bits) are sent every thirty seconds.
Each frame consists of five subframes. Data bit subframes (300 bits transmitted over six
seconds) contain parity bits that allow for data checking and limited error correction.
Clock data parameters describe the SV clock and its relationship to GPS time. Ephemerisdata parameters describe SV orbits for short sections of the satellite orbits. Normally, a
receiver gathers new ephemeris data each hour, but can use old data for up to four hours
without much error. The ephemeris parameters are used with an algorithm that computes
the SV position for any time within the period of the orbit described by the ephemeris
parameter set.
5. DIFFERENTIAL GPS (DGPS) TECHNIQUES
The idea behind all differential positioning is to correct bias errors at one location
with measured bias errors at a known position. A reference receiver, or base station,
computes corrections for each satellite signal. Because individual pseudo-ranges must be
corrected prior to the formation of a navigation solution, DGPS implementations require
-
7/28/2019 live human detection . .
42/50
software in the reference receiver that can track all SVs in view and form individual
pseudo-range corrections for each SV. These corrections are passed to the remote, or
rover, receiver which must be capable of applying these individual pseudo-range
corrections to each SV used in the navigation solution. Applying a simple position
correction from the reference receiver to the remote receiver has limited effect at useful
ranges because both receivers would have to be using the same set of SVs in their
navigation solutions and have identical GDOP terms (not possible at different locations)
to be identically affected by bias errors.
6. THE BIG IDEA GEOMETRICALLY
Suppose the distance of an object from a satellite is found to be 11,000 Miles.
Knowing this narrows down all the possible locations the object could be in the whole
universe to the surface of a sphere that is centered on the satellite and has a radius of
11,000 miles. Next the distances to as second satellite is measured and suppose it is found
to be 12,000 miles. This means that the object is not only on the first sphere but also on a
sphere that is 12,000 miles from the second satellite Or in other words the object is
somewhere on the circle where the two spheres intersect.If another measurement from third satellite is made and found out to be 13,000
Miles, the position is further narrowed down, to the two points sphere the 13,000 mile
sphere cuts through the circle thats the intersection of the first t2wo spheres. So by
ranging from three satellites, the position of the object can be narrowed down to just two
points in space. The decision about the true location is made on the basis of a fourth
measurement. But usually one of the two points is a ridiculous answer (either too far
from Earth) or moving at an impossible velocity and can be rejected without a
measurement.
-
7/28/2019 live human detection . .
43/50
7. BASIC FUNCTIONS
o Location-Determining a basic position
o Navigation-Getting from one location to another
o Tracking-Monitoring the movement of people and things
o Mapping-Creating maps of the worlds
o Timing-Bringing precise timing to the world.
7.1 Navigation
GPS products use what is called "straight line" navigation. The units, when
commanded to navigate to a waypoint, draw a straight line from their present position
to the destination waypoint. The straight line represents the shortest, most direct route
to the waypoint. It does not take into account any obstacles in the path (on land, in the
air or in the water). Consequently, it may be necessary in some situations to record
interim waypoints that alter the course to navigate around obstacles. These additional
mini segments of the journey will each represent straight line routes. Since GPS
products use straight line navigation, it is necessary to use a waypoint at each placeyou need to turn when you are navigating around an obstacle such as a cliff, or
navigating down a highway or river channel. By connecting each of these waypoints
in a chain, you form a "Route". This provides the automatic capability to navigate
through several waypoints in order, without having to manually recall another
waypoint in the unit. Once programmed into a GPS unit, a route provides the option
of navigating forward through the waypoints, or navigating in reverse in order to go
either direction through the route.
7.2 Tracking
Tracking is determining the precise location of a vehicle, person, or other asset to
which it is attached and to record the position of the asset at regular intervals. The
-
7/28/2019 live human detection . .
44/50
recorded location data can be stored within the tracking unit, or it may be transmitted
to a central location data base, or internet-connected computer, using a cellular
(GPRS), radio, or satellite modem embedded in the unit. This allows the asset's
location to be displayed against a map backdrop either in real-time or when analyzing
the track later, using customized software.
Jupiter Global Positioning System (GPS) module is a single board, 12 parallel-
channel receiver intended as a component for an Original Equipment Manufacturer
(OEM) product. The receiver continuously tracks all satellites in view and provides
accurate satellite Positioning data. Jupiter is designed for high performance and
maximum flexibility in a wide range of OEM configurations including handheld, panel
mounts, sensors, and in-vehicle automotive products.
The highly integrated digital receives uses the Zodiac chipset composed of two
custom SIRF devices: the Gemini/Pisces MonoPac and the Scorpio Baseband Processor
(BP). These tow custom chips, together with memory devices and minimum of external
components, from a complete low-power, high-performance GPS receiver solution for
OEMs. Configuration allows the OEM to design for multi-voltage operation, SIRFs.
Hardware Accelerator device (CX11239), or dead reckoning navigation that uses vehicle
sensors in the absence of GPS signals. The Jupiter receiver decodes and processes
signals from all visible GPS satellites. These satellites, in various orbits around the
Earth, broadcast radio frequency (RF) ranging codes, timing information, and navigation
data messages.
The receiver uses all available signals to produce a highly accurate navigation
solution that can be used in a wide variety of end product applications. This solution is
relatively immune to the position jumps induced by blockage that can occur in receivers
with fewer channels.
Jupiter GPS Receiver
-
7/28/2019 live human detection . .
45/50
NAVMANs Jupiter Global Positioning System (GPS) module is a singleboard, 12
parallel-channel receiver intended as a component for an Original Equipment Manufacturer
(OEM) product. The receiver continuously tracks all satellites in view and provides accurate
satellite positioning data. Jupiter is designed for high performance and maximum flexibility in a
wide range of OEM configurations including handhelds, panel mounts, sensors, and in-vehicle
automotive products.
The highly integrated digital receiver uses the Zodiac chipset composed of two
custom SIRF devices: the Gemini/Pisces MonoPac and the Scorpio Baseband
Processor (BP). These two custom chips, together with memory devices and a minimum
of external components, form a complete low-power, high-performance GPS receiver
solution for OEMs. Configurations allow the OEM to design for multi-voltage operation,
SIRF's Hardware Accelerator device (CX11239), or dead reckoning navigation that uses
vehicle sensors in the absence of GPS signals. Each configuration provides up to three
options for different types of antenna connectors. The Jupiter receiver decodes and
processes signals from all visible GPS satellites. These satellites, in various orbits around
the Earth, broadcast radio frequency (RF) ranging codes, timing information, and
navigation data messages. The receiver uses all available signals to produce a highly
accurate navigation solution that can be used in a wide variety of end productapplications. This solution is relatively immune to the position jumps induced by
blockage that can occur in receivers with fewer channels.
NMEA-0183 FORMAT
GPS receiver communication is defined within this format. Most computer
programs that provide real time position information understand and except data to be in
NMEA format. This data includes the complete PVT (position, velocity, time) solution
computed by the GPS receiver. The idea of NMEA is to send a line of data called a
sentence that I totally self-contained and independent from other sentences. All of the
-
7/28/2019 live human detection . .
46/50
standard sentences have a two-letter prefix that defines the device that uses that sentence
type, (For GPS receivers the prefix is GP.) which is followed by a three-letter sequence
that defines the sentence contents,
Each sentence begins with a $ and ends with a carriage return/line feed sequence
and can be no longer that 80 characters of visible text (plus the line terminators). The data
is contained within this single line with data items separated by commas. The data itself
is just ASCII text and may extend over multiple sentences in certain specialized instances
but is normally fully contained in one variable length sentence. The data may carry in the
amount of precision contained in the message. For example time might be indicated to
decimal parts of a second or location may be show with 3 or even 4 digits after the
decimal point. Programs that read the data should only use the commas to determined the
field boundaries and not depend on column positions. There is a provision for a
checksum at the end of each sentence, which may or may not be checked by the unit that
reads the data. The checksum field consists of a * and tow hex digits representing the
exclusive OR of all characters between, but not including, the $ and *. A checksum is
required on some sentence. The general format of NMEA sentence is given below.
HARDWARE CONNECTION
The hardware interface for GPS units is designed to meet the NMEA
requirements. They are also compatible with most computer serial ports using RS232
protocols, however strictly speaking the NMEA standard is not RS232. They recommend
conformance to E1A-422. The interface speed can be adjusted on a some models but the
NMERA standard is 4800 baud with 8 bits of data, no parity, and one stop bit. All units
that support NMEA should support this speed. Note that, at a baud rate of 4800, you caneasily send enough data to more than fill a full second of time. For this reason some units
only send updates every two seconds or may send some data every second while
reserving other data to be sent. In addition some units may send data a couple of seconds
old while other units may send data that is collected within the second it is sent.
Generally time is sent some field within each second so it is pretty easy to figure out what
-
7/28/2019 live human detection . .
47/50
a particular GPS is doing. Some sentences may be sent only during a particular action of
the receiver such as while following a route while other receivers may always send the
sentences and just null out the values. Other difference will be noted in the specific data
description defined later in the text.
At 4800 baud you can only send 480 characters in one second. Since an NMEA
sentence can be as long as 82 characters you can be limited to less than 6 different
sentences. The actual limit is determined by the specific sentences used, nut this shows
that it is easy to overrun the capabilities if you want rapid sentence response. NMEA is
designed to run as a process in the background spitting our sentences which are then
captured as needed by the using program. Some programs cannot do this and these
programs will sample the data stream, then use the data for screen display, and then
sample the data again. Depending on the time needed to use the data there can easily be a
lag of seconds in the responsiveness to changed data.
The NMEA standard has been around for many years (1983) and has undergone
several; revisions. The protocol has changed and the number and types of sentences may
be different depending on the decision. Most GPS receivers understand the standard
which is called 0183 version 2. This standard dictates a transfer rate of 4800 baud. Some
receivers also understand older standards. The oldest standard was 0180 followed by
0182 which transferred data at 1200 baud. An earlier version of 0183 called version 1.5
is also understood by some receivers. Some Garmin units and other brands can be set to
9600 for NMEA output or even higher but this is only recommended if you have
determined that 4800 works ok and then you can try to set it faster. Setting it to run as
fast as you can improve the responsiveness of the program.
In order to use the hardware interface you will need a cable. Generally the cable
is unique to the hardware model so you will need a cable made specifically for the brand
and model of the unit you own. Some of the latest computers no longer include a serial
port but only a USB port. Most GPS receivers will work with Serial to USB adapters and
serial ports attached via the pcmcia (pc card) adapter. For general NMEA use with a GPS
receiver you will only need two wires in the cable, data out from the GPS and ground. A
third wire, Data in, will be needed if you expect the receiver to accept data on this cable
such as to upload way points or send DGPS data to the receiver.
-
7/28/2019 live human detection . .
48/50
GPS receivers may be used to interface with other NMEA devices such as
autopilots, fish binders, or even other GPS receivers. They can also listen to Differential
Beacon Receivers that can send data using the RTCM SC-104 standard. This data is
consistent with the hardware requirements for NMEA in out data.
ADVANTAGES
1. Easy convenience to handle
2. Manual error in security is nullified
3. Low cost to design the circuit the live body sensor is easily available
4. Maintenance of the circuit is good
5. By using this microcontroller IC we can create many more control to the
appliances
6. Reliability
7. compatibility
-
7/28/2019 live human detection . .
49/50
APPLICATIONS
1. For homes
2. For industrial security
3. For human detection in war fields
4. It is mostly applied in the medical field and it is good thing for the blind
people
5. It is mainly applied in the automobile industry to find the distance of the
car while going reverse
FUTURE WORKThe sensing transceiver section is to be mounted on a wireless remote
controlled vehicle. The vehicle can be controlled by a PC with the help ofGSM Modem.
The control unit in sensing section controls the vehicle direction according to the
commands given from PC which is present in the receiver section by using GSM Modem.
-
7/28/2019 live human detection . .
50/50
As control unit AT89C52 microcontroller is used. GSM Modem is interfaced to PC
through serial communication using MAX 232 level converter with the help of a software
C#.net. Different directions of the vehicle are controlled by giving instructions to the
vehicle with the help of data given to the PC.