
Improved estimates of site index curves using a varying parameter ...
Upload
truongduongCategory
view
240download
0
02 -(C)2018A.Bemporad-“ModelPredictiveControl”course 1
Linear Parameter Varying and Time-Varying Model Predictive Control
Alberto Bemporad - “Model Predictive Control” course - Academic year 2017/18

minU
N�1X
k=0kWy(yk � r(t))k2 + kWu(uk � uref(t))k2
(xk+1 = A(p(t))xk +Bu(p(t))uk +Bv(p(t))vk
yk = C(p(t))xk +Dv(p(t))vk
(umin uk umaxymin yk ymax
minz
1
2z0H(p(t))z + ✓
0(t)F (p(t))0z
s.t. G(p(t))z W (p(t)) + S(p(t))✓(t)
02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
Linear Parameter-Varying (LPV) MPC
2
quadraticperformanceindex
constraints
LTIpredictionmodel
QP
• LPVmodelscanbeobtainedfromlinearizationofnonlinearmodelsorfromblack-boxLPVsystemidentification
AllQPmatricesareconstructedonline
Model depends on time t but does not change in prediction

minU
N�1X
k=0kWy(yk � r(t))k2 + kWu(uk � uref(t))k2
(xk+1 = Ak(p(t))xk +Buk(p(t))uk +Bvk(p(t))vk
yk = Ck(p(t))xk +Dvk(p(t))vk
02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
Linear Time-Varying (LTV) MPC
3
quadraticperformanceindex
constraints
LTVpredictionmodel
• LTVmodelscanbeobtainedfromlinearizingNLmodelsaroundtime-varyingreferencetrajectories(e.g.:previousoptimaltrajectory)
LTV-MPCstillleadstoaconvexQP
Model depends on time t and prediction step k
QP
(umin uk umaxymin yk ymax
minz
1
2z0H(p(t))z + ✓
0(t)F (p(t))0z
s.t. G(p(t))z W (p(t)) + S(p(t))✓(t)

d3y
dt3+ 3
d2y
dt2+ 2
dy
dt+ (6+ sin(5t))y
= 5du
dt+ (5+ 2cos(
5
2t))u
02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
LTV-MPC example
4
0 5 10 15 20 25 30 35 40 45 500
0.2
0.4
0.6
0.8
1
1.2
1.4Output
mpcmoveAdaptivempcmoveTimeVaryingmpcmove
0 5 10 15 20 25 30 35 40 45 50-0.5
0
0.5
1
1.5
2
2.5
3Input
• ProcessmodelisLTV:
• LTV-MPCisquitegood
• LPV-MPCtriestocatch-upwithtime-varyingmodel
• LTI-MPCisnotgood
(SeedemoTimeVaryingMPCControlOfATimeVaryingLinearSystemExample,MPCToolbox)

02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
LTV-MPC example•DefineLTVmodel
5
Models = tf; ct = 1;for t = 0:0.1:10 Models(:,:,ct) = tf([5 5+2*cos(2.5*t)],[1 3 2 6+sin(5*t)]); ct = ct + 1;end
Ts = 0.1; % sampling timeModels = ss(c2d(Models,Ts));
•DesignMPCcontroller
sys = ss(c2d(tf([5 5],[1 3 2 6]),Ts)); % average model timep = 3; % prediction horizonm = 3; % control horizonmpcobj = mpc(sys,Ts,p,m);
mpcobj.MV = struct('Min',-2,'Max',2); % input constraintsmpcobj.Weights = struct('MV',0,'MVRate',0.01,'Output',1);

02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
LTV-MPC example• SimulateLTVsystemwithLTIMPCcontroller
6
for ct = 1:(Tstop/Ts+1) real_plant = Models(:,:,ct); % Get the current plant y = real_plant.C*x; u = mpcmove(mpcobj,xmpc,y,1); % Apply LTI MPC x = real_plant.A*x + real_plant.B*u;end
• SimulateLTVsystemwithLPVMPCcontroller
for ct = 1:(Tstop/Ts+1) real_plant = Models(:,:,ct); % Get the current plant y = real_plant.C*x; u = mpcmoveAdaptive(mpcobj,xmpc,real_plant,nominal,y,1); x = real_plant.A*x + real_plant.B*u;end

t
uy
Time-Varying Plant
AdaptiveMPC mv
model
mo
ref
Adaptive MPC Controller
t
A
B
C
D
U
Y
X
DX
Time Varying Predictive Model
Clock
usim
To Workspace
ysim
To Workspace1
Zero-OrderHold
1
Reference
02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
LTV-MPC example• SimulateLTVsystemwithLTVMPCcontroller
7
for ct = 1:(Tstop/Ts+1) real_plant = Models(:,:,ct); % Get the current plant y = real_plant.C*x; u = mpcmoveAdaptive(mpcobj,xmpc,Models(:,:,ct:ct+p),... Nominals,y,1); x = real_plant.A*x + real_plant.B*u;end
• SimulateinSimulink
mpc_timevarying.mdl

02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
LTV-MPC example
8
• Simulinkblock
mpc_timevarying.mdl
need to provide 3D array of future models

• Assumemodelisnonlinearandcontinuous-time dx
dt= f(x(t), u(t))
xk+1 =
I + Ts
@f
@x
����x(t),u(t)
!xk +
Ts
@f
@u
����x(t),u(t)
!uk + fk
02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
Linearization and TIme-Discretization
9
discrete-time LPV model
A(t) B(t)
f(t) model matrices depend on current time t
• Conversiontodiscrete-timelinearpredictionmodel
• Linearizearoundanominalstatex(t)andinputu(t),suchas:
- anequilibrium- areferencetrajectory- themostupdatedvalue
dx
dt(t+ ⌧) '
@f
@x
����x(t),u(t)
(x(t+ ⌧)� x(t))
+@f
@u
����x(t),u(t)
(u(t+ ⌧)� u(t)) + f(x(t), u(t))

dCA
dt=
F
V(CAf � CA)� CAk0e
��ERT
dT
dt=
F
V(Tf � T ) +
UA
�CpV(Tj � T )� �H
�CpCAk0e
��ERT
• T : temperature inside the reactor [K] (state)
• CA : concentration of the reagent in the reactor [kgmol/m3] (state)
• Tj : jacket temperature [K] (input)
• Tf : feedstream temperature [K] (measured disturbance)
• CAf : feedstream concentration [kgmol/m3] (measured disturbance)
02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
Example: LPV-MPC of a nonlinear CSTR system•MPCcontrolofadiabaticcontinuousstirredtankreactor(CSTR)
10
•Objective:manipulateTjtoregulateCAondesiredset-point
• Processmodelisnonlinear:
Tj
Tf
CAf
CAT
F
>> edit ampccstr_linearization (MPCToolbox)
02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
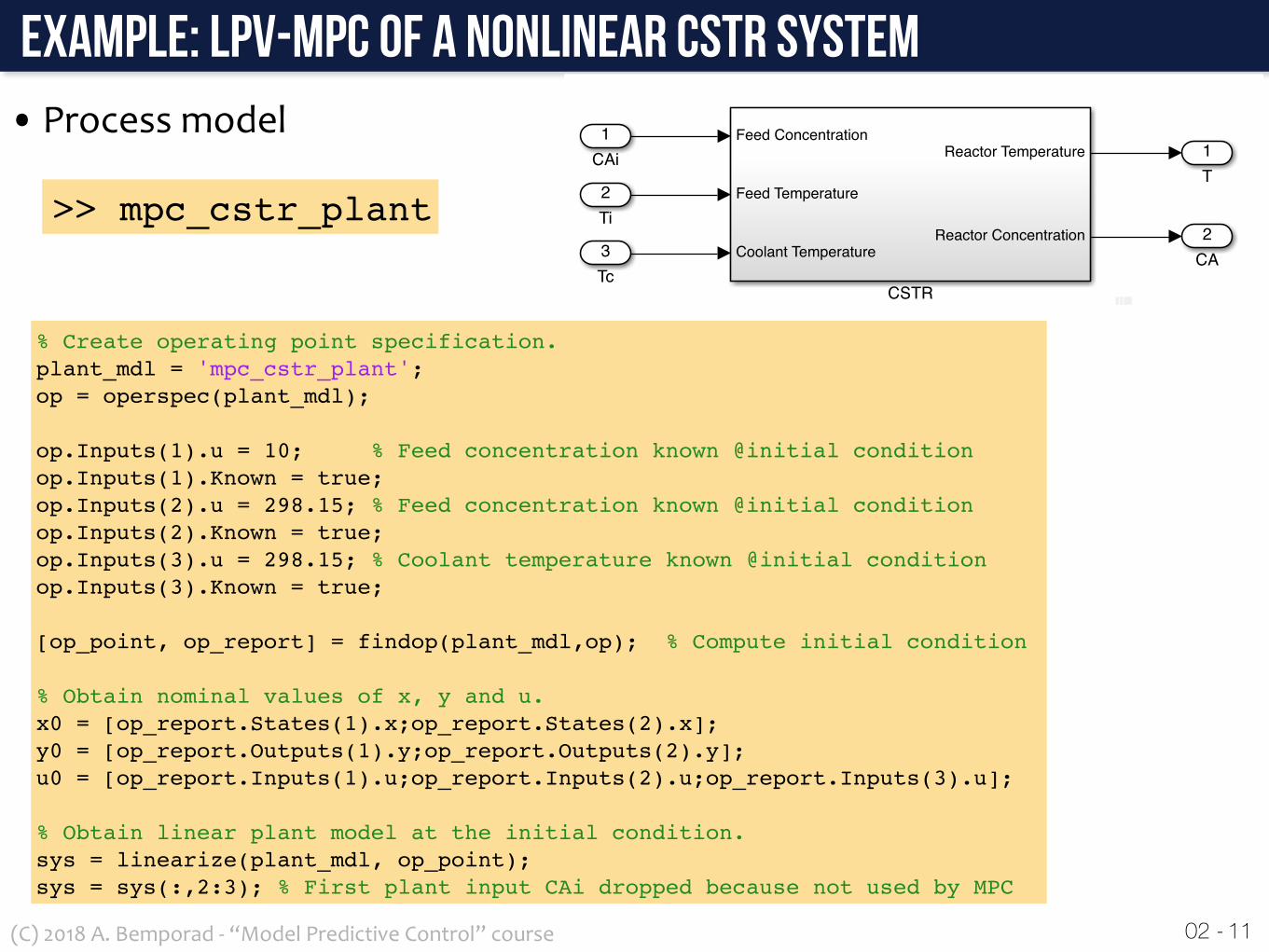
Example: LPV-MPC of a nonlinear CSTR system• Processmodel
11
2CA
1T
Feed Concentration
Feed Temperature
Coolant Temperature
Reactor Temperature
Reactor Concentration
CSTR
3Tc
2Ti
1CAi
>> mpc_cstr_plant
% Create operating point specification.plant_mdl = 'mpc_cstr_plant';op = operspec(plant_mdl);
op.Inputs(1).u = 10; % Feed concentration known @initial conditionop.Inputs(1).Known = true;op.Inputs(2).u = 298.15; % Feed concentration known @initial conditionop.Inputs(2).Known = true;op.Inputs(3).u = 298.15; % Coolant temperature known @initial conditionop.Inputs(3).Known = true;
[op_point, op_report] = findop(plant_mdl,op); % Compute initial condition
% Obtain nominal values of x, y and u.x0 = [op_report.States(1).x;op_report.States(2).x];y0 = [op_report.Outputs(1).y;op_report.Outputs(2).y];u0 = [op_report.Inputs(1).u;op_report.Inputs(2).u;op_report.Inputs(3).u];
% Obtain linear plant model at the initial condition.sys = linearize(plant_mdl, op_point);sys = sys(:,2:3); % First plant input CAi dropped because not used by MPC

02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
Example: LPV-MPC of a nonlinear CSTR system
12
% Discretize the plant model Ts = 0.5; % hoursplant = c2d(sys,Ts); % Design MPC Controller
% Specify signal types used in MPCplant.InputGroup.MeasuredDisturbances = 1;plant.InputGroup.ManipulatedVariables = 2;plant.OutputGroup.Measured = 1;plant.OutputGroup.Unmeasured = 2;plant.InputName = {'Ti','Tc'};plant.OutputName = {'T','CA'};
% Create MPC controller with default prediction and control horizonsmpcobj = mpc(plant);
% Set nominal values in the controllermpcobj.Model.Nominal = struct('X', x0, 'U', u0(2:3), 'Y', y0, 'DX', [0 0]);
•MPCdesign(1/2)

02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
Example: LPV-MPC of a nonlinear CSTR system•MPCdesign(2/2)
13
% Set scale factors because plant input and output signals have different orders of magnitudeUscale = [30 50];Yscale = [50 10];mpcobj.DV(1).ScaleFactor = Uscale(1);mpcobj.MV(1).ScaleFactor = Uscale(2);mpcobj.OV(1).ScaleFactor = Yscale(1);mpcobj.OV(2).ScaleFactor = Yscale(2);
% Let reactor temperature T float (i.e. with no setpoint tracking error penalty), because the objective is to control reactor concentration CA and only one manipulated variable (coolant temperature Tc) is available.mpcobj.Weights.OV = [0 1];
% Due to the physical constraint of coolant jacket, Tc rate of change is bounded by degrees per minute.mpcobj.MV.RateMin = -2;mpcobj.MV.RateMax = 2;

Copyright 1990-2014 The MathWorks, Inc.
Concentration
33
Temperature3
3
MeasurementNoise
33
CA Reference
2
0
u0(1)
Selector
3
u0(2)
Disturbance
T
CA
CAi
Ti
Tc
A
B
C
D
U
Y
X
DX
poles
Successive Linearizer
[2x1]
[2x1]
[2x1]
[2x1]
[2x1]
[2x2]
[2x2]
[2x2]
[2x2] 8{24}
[2x1]
[2x1]
[2x1]
[2x1]
[2x2]
[2x2]
[2x2]
[2x2]
22
32
2
u0(1)
CAi
Ti
Tc
T
CA
CSTR
Pole[2x1]
AdaptiveMPC
mvmodel
mo
ref
mdest.state
Adaptive MPC Controller
3
2
8{24}
Reference
Feed
Coolant
Reactor
Estimated
A
B
C
D
U
Y
X
DX
True
Poles
02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
Example: LPV-MPC of a nonlinear CSTR system• Simulinkdiagram
14
>> ampc_cstr_linearization
plant model
LPV-MPC
linearize + discretize

02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
Example: LPV-MPC of a nonlinear CSTR system•Closed-loopresults
15

Copyright 1990-2014 The MathWorks, Inc.Concentration
22
Temperature3
3
Noise
33
CA Reference
2
0
u0(1)
CAi
CAi
Ti
Tc
T
CA
CSTR
u0(2)
Ti
Disturbance
MPCmv
mo
ref
md
MPC Controller
2
Reference
Feed
Coolant
Reactor
True
02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
Example: LTI-MPC of a nonlinear CSTR system•Letustrywithafixed(LTI)MPCcontroller
16
LTI-MPC
•SametuningofMPCparameters

02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
Example: LTI-MPC of a nonlinear CSTR system•Closed-loopresults
17
very bad tracking !

02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
Example: LTI-MPC of a nonlinear CSTR system•Closed-loopresults
18

p(t) =⇥2
0
s2 + 2�⇥0s + ⇥20
pc(t)
02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
Example: LTV-MPC for UAV navigation•Goal:navigatetwoplanarvehiclesamongobstaclestoatargetposition
•Thedynamicalmodelofeachvehiclesisdescribedby
19
p = [x,y]vehiclepositionpc = commandedposition
• Vehicledynamicsconvertedtodiscrete-timebyexactsampling
• Fivesquareobstaclesplacedinworkspace

• Goal:Uselineartime-varying(LTV)MPCtogeneratedesiredpositionstostabilizingcontrollerinreal-timetoavoidobstaclesandotherUAVs
• Problem:feasiblespaceisnon-convex!
• Mainidea:getaconvexinnerapproximationofthefeasiblespacethatis
– Polyhedral=linearconstraintsonpredictedstatesinLTV-MPCproblem
– Verysimpletocomputeon-line
– Canhandlepolytopicobstaclesofarbitraryshapeanddimension
02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
LTV-MPC for obstacle avoidance
20
(Bemporad,Rocchi,IFAC2011)
• Alternative:non-convexfeasiblespacemodeledbymixed-integerconstraints,guidanceproblemsolvedby(time-invariant)hybridMPC
initial position
target position

p0 2 Rd = current vehicle position
q1, q2, . . . , qM 2 Rd = obstacle positions
p0 6= qi, 8i = 1, . . . ,MP =
8><
>:p 2 Rd :
2
64(q1 � p0)0
...(qM � p0)0
3
75 p
2
64(q1 � p0)0q1
...(qM � p0)0qM
3
75
9>=
>;
02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
Fast greedy approximation algorithm (1/3)
21
• Polyhedralapproximation:
• Assume(forthemoment)thatvehicleandobstaclesarepointsinspace
• Pcontainsp0 anddoesnotcontainanyoftheobstaclesq1,q2,...,qM initsinterior
q1
qM
q2
p0
(Bemporad,Rocchi,CDC2011)

• IftheverticesofWMareavailable,simply
• AssumenowpolyhedralobstacleswithshapesW1,W2,...WM
gj = minw2Rd (qj � p0)0ws.t. w 2 Wj
gj = minh=1,...,sj
Ajcwjh
P =
8><
>:p 2 Rd :
2
64(q1 � p0)0
...(qM � p0)0
3
75 p
2
64(q1 � p0)0q1 + g1
...(qM � p0)0qM + gM
3
75
9>=
>;
02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
Fast greedy approximation algorithm (2/3)
22
IfPisnonempty,then Pcontainsp0 anddoesnotcontainanyoftheobstaclesinitsinterior
q1
qM
q2
p0
W2
W1
WM
• Foreachobstaclejdefinethescalar gj
Bj = {qj}�Wj
(wjh=vertexofWj)
• Polyhedralapproximation:

• AssumepolyhedralobstaclesandpolytopicUAV
V
P =
8><
>:p 2 Rd :
2
64(q1 � p0)0
...(qM � p0)0
3
75 p
2
64(q1 � p0)0(q1 � di) + g1
...(qM � p0)0(qM � di) + gM
3
75 , i = 1, . . . , r
9>=
>;
02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
Fast greedy approximation algorithm (3/3)
23
q1
qM
q2
p0
W2
W1
WM
V , conv(p0 + d1, . . . , p0 + dr)
IfPisnonempty,then PcontainsV anddoesnotcontainanyoftheobstaclesinitsinteriorBj = {qj}�Wj
• Polyhedralapproximation:

pi(t+ 1) = Aipi(t) +Bipci(t) pi(t) =
2
4xi(t)yi(t)zi(t)
3
5
V(t) = {p(t)}+ conv(d1(t), . . . , dr(t))
Bj(t) = {qj(t)}�Wj(t)
02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
LTV-MPC guidance algorithm: prediction model
24
• LinearapproximationofstabilizeddynamicsofUAV#i
positionofvehicle#iattimet
• PolytopicshapeofUAV#i attimet
p(t) V(t)
• Polyhedralshapeofobstacle#j attimetqj(t)
Bj(t)
• Note:othervehiclesinformationaretreatedaspolytopicobstacles(Bj=V )
pci(t) =
2
4xci(t)yci(t)zci(t)
3
5positioncommandedattimet

Ac =
2
64(q1 � p0)0
...(qM � p0)0
3
75 , bc =
2
64(q1 � p0)0q1
...(qM � p0)0qM
3
75
min ⇢✏2 +
N�1X
k=0
kWy(pk � pd(t))k2 + kW�u(pc,k � pc,k�1)k2
s.t. pk+1 = Apk +Bpc,k, k = 0, . . . , N � 1
�min pc,k � pc,k�1 �max, k = 0, . . . , Nu � 1
Ac,kpk bc,k + gk �Ac,kdh,k +1I ✏
k = 0, . . . , N � 1, h = 1, . . . , ri
pc,k = pc,Nu�1, k = Nu, . . . , N
02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
LTV-MPC guidance algorithm: optimization model
• Attimet,selectthedesiredpositionpc(t)fortheUAVbysolvingtheoptimalcontrolproblem(=quadraticprogramming)
prediction horizon
bounds on inputincrements
desired position
UAV dynamics
blocked moves
(soft)obstacleavoidanceconstraints

02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
Example: navigation demo
26
• Initialposition#1=(0,0)• Targetposition#1=(35,30)
• Initialposition#2=(35,-3)• Targetposition#2=(0,20)
ROBMPC projectRobust Model Predictive Control (MPC) for Space Constrained Systems
(Bemporad,2010-2011)
MPCSofTToolboxforMATLAB

02 -(C)2018A.Bemporad-“ModelPredictiveControl”course
Example: navigation demo (cooperative MPC)•Twovehiclesavoidingeachotherandobstaclestowardstheirtargets
27
vehicle dynamics #1
vehicle dynamics #2
MPC #1
MPC #2
previous optimal sequences are exchanged












![[11] Robust Identification and Control With Time-Varying Parameter Perturbations_2004](https://static.fdocuments.in/doc/165x107/577cdf841a28ab9e78b16a08/11-robust-identification-and-control-with-time-varying-parameter-perturbations2004.jpg)





