LIM Universidad de La Coruña · Multibody Dynamics, Brussels, Belgium, 2011 Futuras mejoras...
19
Laboratorio de Ingeniería Mecánica Universidad de La Coruña http://lim.ii.udc.es LIM Modelo Modelo Multicuerpo Multicuerpo de de Autom Autom ó ó vil vil para para su su Aplicaci Aplicaci ó ó n n en en T T é é cnicas cnicas de de Estimaci Estimaci ó ó n n de de Estados Estados Proyecto de fin de carrera Autor: Emilio Sanjurjo Maroño Tutores: Daniel Dopico Dopico Roland Pastorino Julio, 2011 Ingeniería Industrial
Transcript of LIM Universidad de La Coruña · Multibody Dynamics, Brussels, Belgium, 2011 Futuras mejoras...

Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM
ModeloModelo MulticuerpoMulticuerpo de de AutomAutomóóvilvil parapara susu AplicaciAplicacióónn en en TTéécnicascnicas de de EstimaciEstimacióónn de de EstadosEstados
Proyecto de fin de carrera
Autor:Emilio Sanjurjo Maroño
Tutores:Daniel Dopico DopicoRoland Pastorino
Julio, 2011
Ingeniería Industrial

Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM 2
ÍÍndicendice
1.Introducción2.Modelización3.Formulación dinámica4.Fuerzas del modelo5.Validación del modelo6.Software utilizado7.Conclusiones
Fig. 1: vista general del simulador

Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM 3
1. Introducci1. IntroduccióónnSimulación
Se realizan modelos: simplificacionesDiscrepancias entre salidas de la simulación y las del prototipo real
Estimador de estados Interacción entre modelo y prototipo de vehículoCorrección del estado del modeloSensores virtuales, aplicados al desarrollo de controladores
Fig. 2: esquema de una simulación Fig. 3: esquema de un estimador de estados

Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM 4
1. Introducci1. IntroduccióónnPrototipo de vehículo
Desarrollo propioChasis multitubular de aceroMotor y caja de cambios de Talbot HórizonSensores:
• Ángulos girados por las ruedas• Presión de frenos• Par transmitido a las ruedas...
Sistemas by-wire:• Acelerador, freno, dirección
Fig. 6: sistema de freno by-wire Fig. 7: sistema dirección by-wire
Fig. 4: prototipo de vehículo
Fig. 5: sistema de acelerador by-wire

Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM 5
2. 2. ModelizaciModelizacióónnSituación en el espacio de los sólidos: sistemas de coordenadas
Coordenadas mixtas: coordenadas cartesianas de puntos y vectores, y ángulos y distanciasSólidos modelizados con 4 elementos (puntos y/o vectores), para definir un triedroPuede haber puntos y vectores adicionales
Definición de pares cinemáticosSe comparten elementosEn caso necesario, restricciones adicionales
Nº variables 168Nº restricciones efectivas 154
Nº grados de libertad 14
Fig. 8: modelo multicuerpo Tab.1: características del modelo

Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM 6
2. 2. ModelizaciModelizacióónnCaracterización de las propiedades físicas
MasaPosición del centro de masasTensor de inercia
Fig. 10: mangueta trasera derecha
Fig. 9: chasis Fig. 11: rueda trasera derecha

Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM 7
3. Formulaci3. Formulacióón dinn dináámicamicaMétodo de Lagrange aumentado con proyecciones ortogonales[1]
Integración con regla trapezoidal implícita de paso simpleResolución del sistema por el método de Newton Raphson
en donde , y Proyecciones ortogonales en velocidad y aceleración
t t+ + =q qMq Φ αΦ Φ λ Qi 1 i i 1n n n+ += +λ λ αΦ
[ ] ( )2
t tt( )4Δ
= + + −q qf q Mq Φ αΦ Φ λ Q
( )2
t( ) t t2 4
⎡ ⎤∂ Δ Δ= + + +⎢ ⎥∂⎣ ⎦
q qf q M C Φ αΦ K
q
( )2 2 2
t tt
t t t t t2 4 2 4 4
⎡ ⎤ ⎡ ⎤Δ Δ Δ Δ Δ+ + + = + + −⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦*
q q qM C Φ αΦ K q M C K q Φ αΦ
( ) ( )2 2 2
t * tt
t t t t t2 4 2 4 4
⎡ ⎤ ⎡ ⎤Δ Δ Δ Δ Δ+ + + = + + − +⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦q q q qM C Φ αΦ K q M C K q Φ α Φ q Φ
∂= −
∂QKq
∂= −
∂QCq
( ) ( )i 1 ii
+
∂⎡ ⎤Δ = − ⎡ ⎤⎢ ⎥ ⎣ ⎦∂⎣ ⎦
f qq f q
q
[1] J. Cuadrado, R. Gutiérrez, M. A. Naya, and P. Morer. A comparison in terms of accuracy and efficiency between a MBS dynamic formulation with stress analysis and a non-linear FEA code. Int. Journal for Numerical Methods in Engineering, 51(9):1033–1052, 2001.

Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM 8
4. Fuerzas del modelo4. Fuerzas del modeloFuerzas gravitatorias
Fuerza vertical y hacia abajo, aplicada en el centro de masas de cada sólido
Par a las ruedas traserasValor medido por el sensor de par instalado en la rueda del prototipo
Fuerzas de las suspensiones
Fuerza de muelle y amortiguador lineales
Constante del muelle determinada experimentalmente
Constante del amortiguador estimada a partir de resultados de simulación
Fig. 12: elemento de suspensión

Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM 9
4. Fuerzas del modelo4. Fuerzas del modeloPar de frenado:
Par de deslizamiento:
Par de bloqueo:
Parámetro de bloqueo:
Par de frenado:
deslizamientoT 2 P dA= ∫∫μ ρ
( )bloqueo bloqueo 0 bloqueoT K C= − +ν ν ν2
críticaeν⎛ ⎞−⎜ ⎟ν⎝ ⎠κ =
( )freno bloqueo deslizamientoT T 1 T= κ + − κ
Fig. 14: área de contacto disco-pastilla
-6 -4 -2 0 2 4 60
0.2
0.4
0.6
0.8
1
Velocidad angular
Par
ámet
ro d
e bl
oque
o
Fig. 13: parámetro de bloqueo frente a la velocidad angular

Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM 10
4. Fuerzas del modelo4. Fuerzas del modeloFuerza normal del los neumáticos
Cálculo de la distancia del centro de la rueda al plano
Posición del punto de contacto
Condiciones para que el punto estédentro del triángulo
cFn k(R d) amort c= − − ⋅ ⋅ ⋅nrn
x y z
2 2 2x y z
n x n y n z Dd
n n n
+ + +=
+ +
p 0 01 01 02 02= + +r r v vα α
01
02
01 02
00
1
≥
≥+ ≤
ααα α
Fig 15: cálculo del punto de contacto
Fig 16: punto de contacto en el plano del suelo
Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM 11
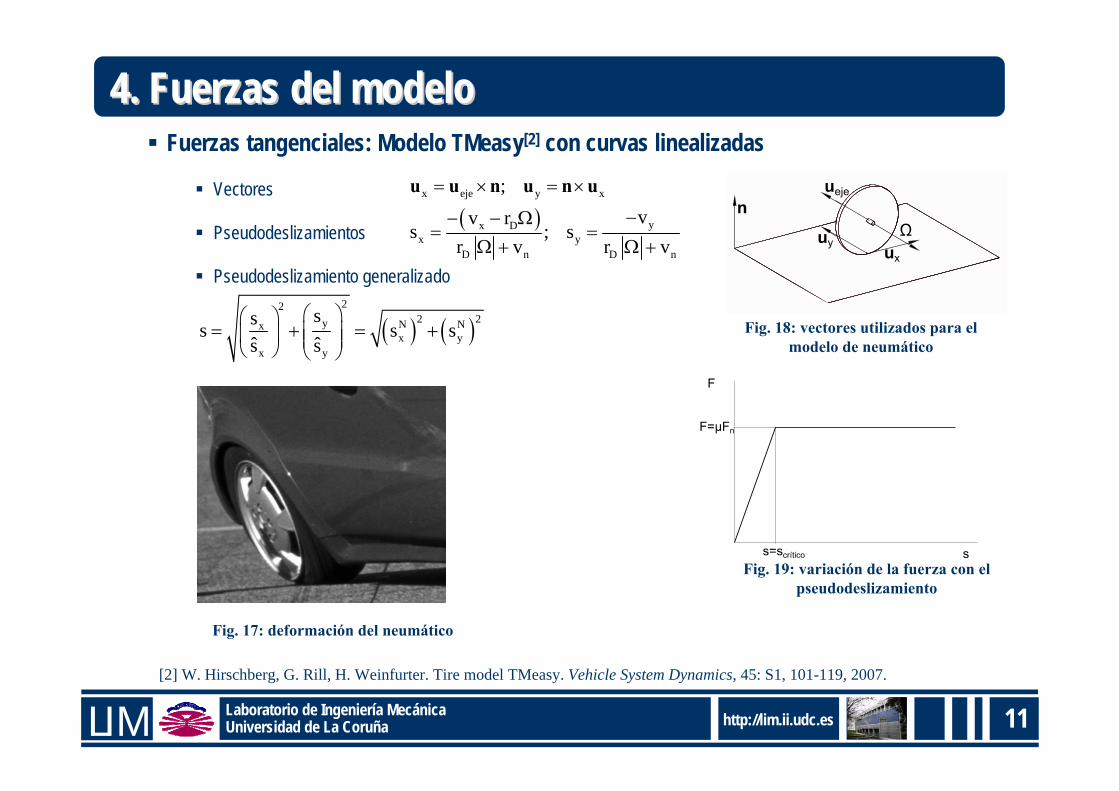
4. Fuerzas del modelo4. Fuerzas del modeloFuerzas tangenciales: Modelo TMeasy[2] con curvas linealizadas
Vectores
Pseudodeslizamientos
Pseudodeslizamiento generalizado
x eje y x;= × = ×u u n u n u
( ) yx Dx y
D n D n
vv rs ; s
r v r v−− − Ω
= =Ω + Ω +
( ) ( )22
2 2y N Nxx y
x y
sss s sˆ ˆs s
⎛ ⎞⎛ ⎞= + = +⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
Fig. 18: vectores utilizados para el modelo de neumático
Fig. 19: variación de la fuerza con el pseudodeslizamiento
Fig. 17: deformación del neumático
[2] W. Hirschberg, G. Rill, H. Weinfurter. Tire model TMeasy. Vehicle System Dynamics, 45: S1, 101-119, 2007.

Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM 12
4. Fuerzas del modelo4. Fuerzas del modeloFuerzas tangenciales: Modelo TMeasy[2] con curvas linealizadas
Fuerzas dinámicas: fuerza de muelle-amortiguador
Ecuación diferencial del neumático
D Nx x e x e x e
D x N
D Ny y e y e y e
D y N
F F 1F s x c x d xˆs s r s v
F F 1F s y c y d yˆs s r s v
−≈ + = +
Ω +
−≈ + = +
Ω +
( )* * *Tx x e x D Tx x e Tx D x N
* * *Ty y e y Ty y e Ty D y N
F F ˆv d x v r v c x , donde v r s vs sF F ˆv d y v v c y , donde v r s vs s
⎛ ⎞+ = − − Ω − = Ω +⎜ ⎟⎝ ⎠⎛ ⎞+ = − − = Ω +⎜ ⎟⎝ ⎠
Fig. 20: representación de la deformación del neumático
[2] W. Hirschberg, G. Rill, H. Weinfurter. Tire model TMeasy. Vehicle System Dynamics, 45: S1, 101-119, 2007.

Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM 13
5. Validaci5. Validacióón del modelon del modeloCondiciones de ensayo
Maniobra en línea recta a baja velocidad• Velocidad máxima: 23 km/h
• Distancia recorrida: 63 m
Caracterización del suelo
Fig. 22: puntos del levantamiento topográfico y mallado final
Fig. 21: pista de pruebas

Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM 14
0 2 4 6 8 10 12 14 16 18 20 22-200
-150
-100
-50
0
50
100
Tiempo (s)
Par
(Nm
)
Entradas del modelo calculadas a partir de varias repeticiones de una maniobra de referencia
Tratamiento de datos• Filtrado, eliminación del offset, escalado, etc
• Promediado de las 7 repeticiones
• Cálculo del intervalo de confianza al 95%
Variables de entrada al modelo• Par aplicado a las ruedas traseras
• Presión de freno
5. Validaci5. Validacióón del modelon del modelo
n 1 n 1(1 /2) (1 /2)
S Sx t , x tn n
− −−α −α
⎛ ⎞− ⋅ + ⋅⎜ ⎟⎝ ⎠
0 2 4 6 8 10 12 14 16 18 20 22-200
-150
-100
-50
0
50
100
Tiempo (s)
Par
(Nm
)
Intervalo confianza 95%Media muestral
Fig. 23: par en las ruedas traseras Fig. 24: entrada de par del modelo

Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM 15
5. Validaci5. Validacióón del modelon del modelo

Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM 16
5. Validaci5. Validacióón del modelon del modelo
0 2 4 6 8 10 12 14 16 18 20 22-5
0
5
10
15
20
25
Tiempo (s)
Vel
ocid
ad (k
m/h
)
Int confianza 95%Media muestralSimulación
Resultados de la simulación
Fig. 25: velocidad de la rueda delantera izquierda Fig. 26: aceleración longitudinal0 2 4 6 8 10 12 14 16 18 20 22-3
-2
-1
0
1
2
Tiempo (s)
Ace
lera
ción
(m/s
2 )
Int confianza 95%Media muestralSimulación
0 2 4 6 8 10 12 14 16 18 20 22-3
-2
-1
0
1
2
3
Tiempo (s)
Áng
ulo
( ° )
Int. confiaza 95%Media muestralSimulación
Fig. 27: ángulo de balanceo
0 2 4 6 8 10 12 14 16 18 20 22-3
-2
-1
0
1
2
3
Tiempo (s)
Vel
ocid
ad a
ngul
ar ( ° /s
)
Int confianza 95%Media muestralSimulación
Fig. 28: velocidad de balanceo
Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM 17
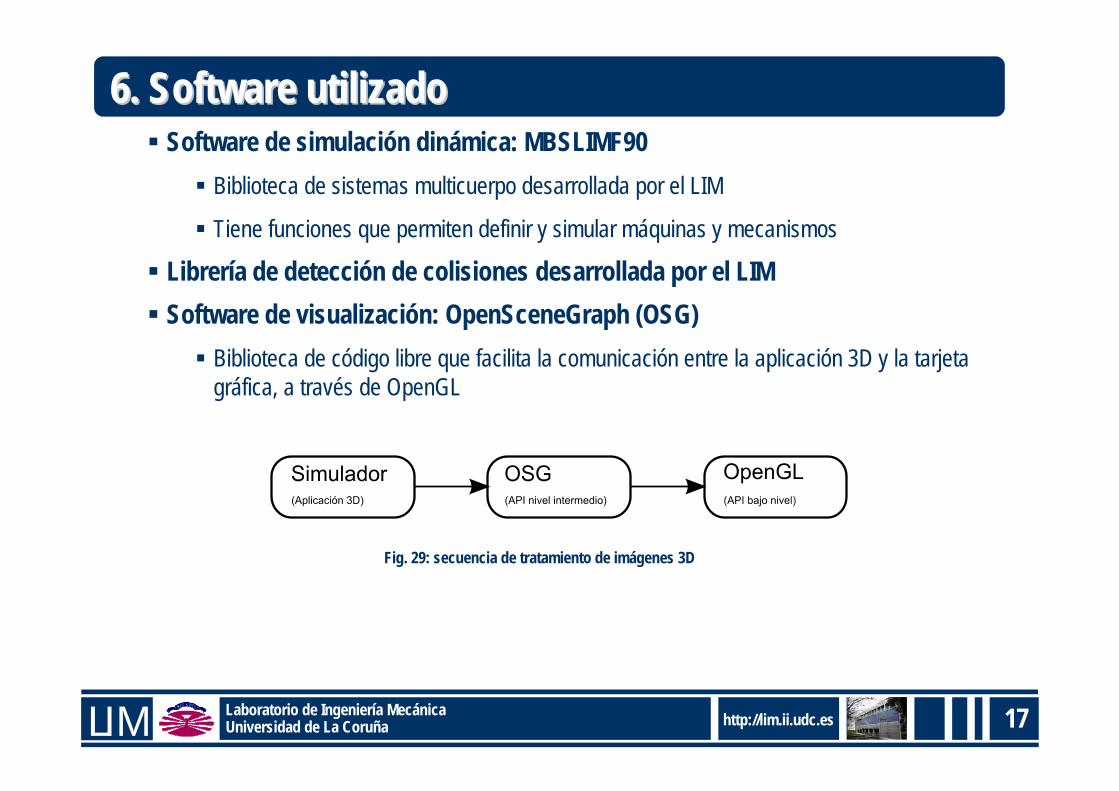
6. Software utilizado6. Software utilizadoSoftware de simulación dinámica: MBSLIMF90
Biblioteca de sistemas multicuerpo desarrollada por el LIM
Tiene funciones que permiten definir y simular máquinas y mecanismos
Librería de detección de colisiones desarrollada por el LIMSoftware de visualización: OpenSceneGraph (OSG)
Biblioteca de código libre que facilita la comunicación entre la aplicación 3D y la tarjeta gráfica, a través de OpenGL
Fig. 29: secuencia de tratamiento de imágenes 3D

Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM 18
7. Conclusiones7. ConclusionesDesarrollo un modelo detallado de automóvil capaz de ejecutarse en tiempo real
Identificación de los parámetros del modelo• Geometría
• Distribución de masas
• Constantes elásticas de los muelles de suspensión
Programación de un modelo de neumático con capacidad para funcionar a velocidad nula y para detenerse completamente, incluso en superficies con fuerte pendiente
Simulador base para implementar un estimador de estados
Realización de un detallado levantamiento topográfico para caracterizar el suelo sobre el que se realizan las maniobras

Laboratorio de Ingeniería MecánicaUniversidad de La Coruña http://lim.ii.udc.esLIM 19
7. Conclusiones7. ConclusionesEste trabajo se ha utilizado para escribir parte del siguiente artículo:
R. Pastorino, D. Dopico, E. Sanjurjo, M. A. Naya. Validation of a Multibody Model for an X-by-wire
Vehicle Prototype Through Field Testing. Proceedings of the ECCOMAS Thematic Conference on
Multibody Dynamics, Brussels, Belgium, 2011
Futuras mejorasImplementación de resistencia aerodinámica
Implementación de la resistencia a la rodadura en los neumáticos
Caracterización de parámetros de neumáticos, frenos y suspensiones
Realización de otros tipos de maniobras, incluyendo dinámica lateral, altas velocidades, etc


















