Light Scattering by Systems of Particles: Null-FieldMethodwithDiscrete Sources: Theory and Programs
333
Springer Series in optical sciences 124 founded by H.K.V. Lotsch Editor-in-Chief: W. T. Rhodes, Atlanta Editorial Board: A. Adibi, Atlanta T. Asakura, Sapporo T. W. H¨ ansch, Garching T. Kamiya, Tokyo F. Krausz, Garching B. Monemar, Link¨ oping H. Venghaus, Berlin H. Weber, Berlin H. Weinfurter, M¨ unchen
Transcript of Light Scattering by Systems of Particles: Null-FieldMethodwithDiscrete Sources: Theory and Programs

Springer Series in
optical sciences 124
founded by H.K.V. Lotsch
Editor-in-Chief: W. T. Rhodes, Atlanta
Editorial Board: A. Adibi, AtlantaT. Asakura, SapporoT. W. Hansch, GarchingT. Kamiya, TokyoF. Krausz, GarchingB. Monemar, LinkopingH. Venghaus, BerlinH. Weber, BerlinH. Weinfurter, Munchen

Springer Series in
optical sciencesThe Springer Series in Optical Sciences, under the leadership of Editor-in-Chief William T. Rhodes, GeorgiaInstitute of Technology, USA, provides an expanding selection of research monographs in all major areas ofoptics: lasers and quantum optics, ultrafast phenomena, optical spectroscopy techniques, optoelectronics,quantum information, information optics, applied laser technology, industrial applications, and othertopics of contemporary interest.With this broad coverage of topics, the series is of use to all research scientists and engineers who needup-to-date reference books.
The editors encourage prospective authors to correspond with them in advance of submitting a manu-script. Submission of manuscripts should be made to the Editor-in-Chief or one of the Editors. See alsowww.springeronline.com/series/624
Editor-in-Chief
William T. RhodesGeorgia Institute of TechnologySchool of Electrical and Computer EngineeringAtlanta, GA 30332-0250, USAE-mail: [email protected]
Editorial BoardAli AdibiGeorgia Institute of TechnologySchool of Electrical and Computer EngineeringAtlanta, GA 30332-0250, USAE-mail: [email protected]
Toshimitsu AsakuraHokkai-Gakuen UniversityFaculty of Engineering1-1, Minami-26, Nishi 11, Chuo-kuSapporo, Hokkaido 064-0926, JapanE-mail: [email protected]
Theodor W. HanschMax-Planck-Institut fur QuantenoptikHans-Kopfermann-Straße 185748 Garching, GermanyE-mail: [email protected]
Takeshi KamiyaMinistry of Education, Culture, SportsScience and TechnologyNational Institution for Academic Degrees3-29-1 Otsuka, Bunkyo-kuTokyo 112-0012, JapanE-mail: [email protected]
Ferenc KrauszLudwig-Maximilians-Universitat MunchenLehrstuhl fur Experimentelle PhysikAm Coulombwall 185748 Garching, GermanyandMax-Planck-Institut fur QuantenoptikHans-Kopfermann-Straße 185748 Garching, GermanyE-mail: [email protected]
Bo MonemarDepartment of Physicsand Measurement TechnologyMaterials Science DivisionLinkoping University58183 Linkoping, SwedenE-mail: [email protected]
Herbert VenghausFraunhofer Institut fur NachrichtentechnikHeinrich-Hertz-InstitutEinsteinufer 3710587 Berlin, GermanyE-mail: [email protected]
Horst WeberTechnische Universitat BerlinOptisches InstitutStraße des 17. Juni 13510623 Berlin, GermanyE-mail: [email protected]
Harald WeinfurterLudwig-Maximilians-Universitat MunchenSektion PhysikSchellingstraße 4/III80799 Munchen, GermanyE-mail: [email protected]

A. Doicu T. Wriedt Y.A. Eremin
Light Scatteringby Systemsof ParticlesNull-Field Method with Discrete Sources:Theory and Programs
123
With 123 Figures, 4 in Color and 9 Tables

Adrian DoicuInstitut fur Methodik der FernerkundungDeutsches Institut fur Luft- und Raumfahrt e.V.
E-mail: [email protected]
Thomas WriedtUniversity of Bremen, FB4, VT
E-mail: [email protected]
Yuri A. EreminApplied Mathematics and Computer Science Faculty
E-mail: [email protected]
ISSN 0342-4111
ISBN-10 3-540-33696-6 Springer Berlin Heidelberg New York
ISBN-13 978-3-540-33696-9 Springer Berlin Heidelberg New York
This work is subject to copyright. All rights are reserved, whether the whole or part of the material isconcerned, specif ically the rights of translation, reprinting, reuse of illustrations, recitation, broadcasting,reproduction on microf ilm or in any other way, and storage in data banks. Duplication of this publication orparts thereof is permitted only under the provisions of the German Copyright Law of September 9, 1965, in itscurrent version, and permission for use must always be obtained from Springer-Verlag. Violations are liableto prosecution under the German Copyright Law.
Springer is a part of Springer Science+Business Media.
springer.com
The use of general descriptive names, registered names, trademarks, etc. in this publication does not imply,even in the absence of a specific statement, that such names are exempt from the relevant protective laws andregulations and therefore free for general use.
Cover concept by eStudio Calamar Steinen using a background picture from The Optics Project. Courtesy ofJohn T. Foley, Professor, Department of Physics and Astronomy, Mississippi State University, USA.Cover production: design & production GmbH, Heidelberg
Printed on acid-free paper SPIN: 11554325 5 4 3 2 1 0
SPi A Eusing a Springer LT X macro package
57/3100/SPi
Library of Congress Control Number: 2006929447
© Springer-Verlag Berlin Heidelberg 2006
Typesetting by the Authors and
Badgasteiner Str. 3, 28359 Bremen, Germany
Moscow State University
D-82234 Oberpfaffenhofen, Germany
119899 Moscow, Russia

To our families:Aniela and Alexandru
Ursula and JannisNatalia, Elena and Oleg

Preface
Since the classic paper by Mie [159] or even the papers by Clebsch [37] andLorenz [146] there is a permanent preoccupation in light scattering theory. Miewas interested in the varied colors exhibited by colloidal suspensions of noblemetal spheres, but nowadays, the theory of light scattering by particles coversa much broader and diverse field. Particles encountered in practical applica-tions are no longer considered spherical; they are nonspherical, nonrotationalsymmetric, inhomogeneous, coated, chiral or anisotropic.
Light scattering simulation is needed in optical particle characterization,to understand new physical phenomena or to design new particle diagnosticssystems. Other examples of applications are climatology and remote sens-ing of Earth and planetary atmospheres, which rely on the analysis of theparameters of radiation scattered by aerosols, clouds, and precipitation. Sim-ilar electromagnetic modeling methods are needed to investigate microwavescattering by raindrops and ice crystals, while electromagnetic scattering isalso encountered in astrophysics, ocean and biological optics, optical com-munications engineering, and photonics technology. Specifically, in near-field-or nano-optics and the design of optical sensor, biosensors or particle surfacescanners, light scattering by particles on or near infinite surfaces is of interest.
Many techniques have been developed for analyzing scattering problems.Each of the available methods generally has a range of applicability that isdetermined by the size of the particle relative to the wavelength of the incidentradiation. Classical methods of solution like the finite-difference method, finiteelement method or integral equation method, owing to their universality, leadto computational algorithms that are expensive in computer resources. Thissignificantly restricts their use in studying electromagnetic scattering by largeparticles. In the last years, the null-field method has become an efficient andpowerful tool for rigorously computing electromagnetic scattering by singleand compounded particles significantly larger than a wavelength. In manyapplications, it compares favorably to other techniques in terms of efficiency,accuracy, and size parameter range and is the only method that has been usedin computations for thousand of particles in random orientation.

VIII Preface
The null-field method (otherwise known as the extended boundary condi-tion method, Schelkunoff equivalent current method, Eswald–Oseen extinctiontheorem and T-matrix method) has been developed by Waterman [253, 254]as a technique for computing electromagnetic scattering by perfectly conduct-ing and dielectric particles. In time, the null-field method has been appliedto a wide range of scattering problems. A compilation of T-matrix publica-tions and a classification of various references into a set of narrower subjectcategories has recently been given by Mishchenko et al. [172]. Peterson andStrom [187, 189], Varadan [233], and Strom and Zheng [219] extended thenull-field method to the case of an arbitrary number of particles and to mul-tilayered and composite particles. Lakhtakia et al. [135] applied the null-fieldmethod to chiral particles, while Varadan et al. [236] treated multiple scatter-ing in random media. A number of modifications to the null-field method havebeen suggested, especially to improve the numerical stability in computationsfor particles with extreme geometries. These techniques include formal mod-ifications of the single spherical coordinate-based null-field method [25, 109],different choices of basis functions and the application of the spheroidal coor-dinate formalism [12,89] and the use of discrete sources [49]. Mishchenko [163]developed analytical procedures for averaging scattering characteristics overparticle orientations and increased the efficiency of the method. At the sametime, several computer programs for computing electromagnetic scattering byaxisymmetric particles in fixed and random orientations have been designed.In this context, we mention the Fortran programs included with the book byBarber and Hill [8] and the Internet available computer programs developedby Mishchenko et al. [169]. For specific applications, other computer codeshave been developed by various research groups, but these programs are cur-rently not yet publicly available.
This monograph is based on our own research activity over the last decadeand is intended to provide an exhaustive analysis of the null-field methodand to present appropriate computer programs for solving various scatteringproblems. The following outline should provide a fair idea of the main intentand content of the book.
In the first chapter, we recapitulate the fundamentals of classical electro-magnetics and optics which are required to present the theory of the null-fieldmethod. This part contains explicit derivations of all important results and ismainly based on the textbooks of Kong [122] and Mishchenko et al. [169].
The next chapter provides a comprehensive analysis of the null-fieldmethod for various electromagnetic scattering problems. This includes scat-tering by
– Homogeneous, dielectric (isotropic, uniaxial anisotropic, chiral), and per-fectly conducting particles with axisymmetric and nonaxisymmetric sur-faces– Inhomogeneous, layered and composite particles,– Clusters of arbitrarily shaped particles, and– Particles on or near a plane surface.

Preface IX
The null-field method is used to compute the T matrix of each individualparticle and the T-matrix formalism is employed to analyze systems of par-ticles. For homogeneous, composite and layered, axisymmetric particles, thenull-field method with discrete sources is applied to improve the numericalstability of the conventional method. Evanescent wave scattering and scatter-ing by a half-space with randomly distributed particles are also discussed. Toextend the domain of applicability of the method, plane waves and Gaussianlaser beams are considered as external excitations.
The last chapter covers the numerical analysis of the null-field method bypresenting some exemplary computational results. For all scattering problemsdiscussed in the preceding chapters we developed a Fortran software packagewhich is provided on a CD-ROM with the book. After a description of theFortran programs we present a number of exemplary computational resultswith the intension to demonstrate the broad range of applicability of themethod. These should enable the readers to adapt and extend the programsto other specific applications and to gain some practical experience with themethods outlined in the book. Because it is hardly possible to comprehensivelyaddress all aspects and computational issues, we choose those topics that wethink are currently the most interesting applications in the growing field oflight scattering theory. As we are continuously working in this field, furtherextensions of the programs and more computational results will hopefullybecome available at our web page www.t-matrix.de. The computer programshave been extensively tested, but we cannot guarantee that the programs arefree of errors. In this regard, we like to encourage the readers to communicateus any errors in the program or documentation. This software is publishedunder German Copyright Law (Urheberrechtsgesetz, UrhG) and in this regardthe readers are granted the right to apply the software but not to copy, to sellor distribute it nor to make it available to the public in any form. We providethe software without warranty of any kind. No liability is taken for any loss ordamages, direct or indirect, that may result through the use of the programs.
This volume is intended for engineering and physics students as well asresearchers in scattering theory, and therefore we decided to leave out rigor-ous mathematical details. The properties of scalar and vector spherical wavefunctions, addition theorems under translation and rotation of the coordinatesystems and some completeness results are presented in appendices. Thesecan be regarded as a collection of necessary formulas.
We would like to thank Elena Eremina, Jens Hellmers, Sorin Pulbere,Norbert Riefler, and Roman Schuh for many useful discussions and for per-forming extensive simulation and validation tests with the programs providedwith the book. We also thankfully acknowledge support from DFG (DeutscheForschungsgemeinschaft) and RFBR (Russian Foundation of Basic Research)which funded our research in light scattering theory.
Bremen, Adrian DoicuApril 2006 Thomas Wriedt
Yuri Eremin

X Preface
Researching for and writing of this book were both very personal butshared experience. My new research activity in the field of inversion methodsfor atmospheric remote sensing has left me little free time for writing. Fortu-nately, I have had assistance of my wife Aniela. She read what I had written,spent countless hours editing the manuscript and helped me in the testing andcomparing of computer codes. Without the encouragement and the stimulusgiven by Aniela, this book might never have been completed. For her love andsupport, which buoyed me through the darkest time of self-doubt and fear,I sincerely thank.
Munchen, Adrian DoicuApril 2006

Contents
1 Basic Theory of Electromagnetic Scattering . . . . . . . . . . . . . . . 11.1 Maxwell’s Equations and Constitutive Relations . . . . . . . . . . . . . 11.2 Incident Field . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.2.1 Polarization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.2.2 Vector Spherical Wave Expansion . . . . . . . . . . . . . . . . . . . 15
1.3 Internal Field . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.3.1 Anisotropic Media . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221.3.2 Chiral Media . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
1.4 Scattered Field . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 331.4.1 Stratton–Chu Formulas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 341.4.2 Far-Field Pattern and Amplitude Matrix . . . . . . . . . . . . . 401.4.3 Phase and Extinction Matrices . . . . . . . . . . . . . . . . . . . . . . 441.4.4 Extinction, Scattering and Absorption Cross-Sections . . 481.4.5 Optical Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 531.4.6 Reciprocity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
1.5 Transition Matrix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 571.5.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 581.5.2 Unitarity and Symmetry . . . . . . . . . . . . . . . . . . . . . . . . . . . 611.5.3 Randomly Oriented Particles . . . . . . . . . . . . . . . . . . . . . . . 66
2 Null-Field Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 832.1 Homogeneous and Isotropic Particles . . . . . . . . . . . . . . . . . . . . . . . 84
2.1.1 General Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 852.1.2 Instability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 892.1.3 Symmetries of the Transition Matrix . . . . . . . . . . . . . . . . . 932.1.4 Practical Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . 952.1.5 Surface Integral Equation Method . . . . . . . . . . . . . . . . . . . 972.1.6 Spherical Particles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
2.2 Homogeneous and Chiral Particles . . . . . . . . . . . . . . . . . . . . . . . . . 1022.3 Homogeneous and Anisotropic Particles . . . . . . . . . . . . . . . . . . . . 104

XII Contents
2.4 Inhomogeneous Particles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1052.4.1 Formulation with Addition Theorem . . . . . . . . . . . . . . . . . 1062.4.2 Formulation without Addition Theorem . . . . . . . . . . . . . . 112
2.5 Layered Particles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1152.5.1 General Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1152.5.2 Practical Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1182.5.3 Formulation with Discrete Sources . . . . . . . . . . . . . . . . . . . 1202.5.4 Concentrically Layered Spheres . . . . . . . . . . . . . . . . . . . . . 122
2.6 Multiple Particles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1242.6.1 General Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1242.6.2 Formulation for a System with N Particles . . . . . . . . . . . 1312.6.3 Superposition T -matrix Method . . . . . . . . . . . . . . . . . . . . . 1322.6.4 Formulation with Phase Shift Terms . . . . . . . . . . . . . . . . . 1362.6.5 Recursive Aggregate T -matrix Algorithm . . . . . . . . . . . . . 137
2.7 Composite Particles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1392.7.1 General Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1392.7.2 Formulation for a Particle with N Constituents . . . . . . . 1432.7.3 Formulation with Discrete Sources . . . . . . . . . . . . . . . . . . . 145
2.8 Complex Particles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1462.9 Effective Medium Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
2.9.1 T -matrix Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1502.9.2 Generalized Lorentz–Lorenz Law . . . . . . . . . . . . . . . . . . . . 1592.9.3 Generalized Ewald–Oseen Extinction Theorem . . . . . . . . 1612.9.4 Pair Distribution Functions . . . . . . . . . . . . . . . . . . . . . . . . . 162
2.10 Particle on or near an Infinite Surface . . . . . . . . . . . . . . . . . . . . . . 1642.10.1 Particle on or near a Plane Surface . . . . . . . . . . . . . . . . . . 1642.10.2 Particle on or near an Arbitrary Surface . . . . . . . . . . . . . . 173
3 Simulation Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1833.1 T -matrix Program . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
3.1.1 Complete Uniform Distribution Function . . . . . . . . . . . . . 1853.1.2 Incomplete Uniform Distribution Function . . . . . . . . . . . . 186
3.2 Electromagnetics Programs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1883.2.1 T -matrix Programs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1883.2.2 MMP Program . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1893.2.3 DDSCAT Program . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1923.2.4 CST Microwave Studio Program . . . . . . . . . . . . . . . . . . . . 198
3.3 Homogeneous, Axisymmetric and Nonaxisymmetric Particles . . 2013.3.1 Axisymmetric Particles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2013.3.2 Nonaxisymmetric Particles . . . . . . . . . . . . . . . . . . . . . . . . . 2123.3.3 Triangular Surface Patch Model . . . . . . . . . . . . . . . . . . . . . 216
3.4 Inhomogeneous Particles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2213.5 Layered Particles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2253.6 Multiple Particles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2303.7 Composite Particles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 238

Contents XIII
3.8 Complex Particles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2423.9 Particle on or Near a Plane Surface . . . . . . . . . . . . . . . . . . . . . . . . 2453.10 Effective Medium Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246
A Spherical Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253A.1 Spherical Bessel Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254A.2 Legendre Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 256
B Wave Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261B.1 Scalar Wave Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261B.2 Vector Wave Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265B.3 Rotations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 270B.4 Translations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 276
C Computational Aspects in Effective Medium Theory . . . . . . . 289C.1 Computation of the Integral I1
mm′n′′ . . . . . . . . . . . . . . . . . . . . . . . 289C.2 Computation of the Integral I2
mm′n′′ . . . . . . . . . . . . . . . . . . . . . . . 292C.3 Computation of the Terms S1
1nn′ and S21nn′ . . . . . . . . . . . . . . . . . 293
D Completeness of Vector Spherical Wave Functions . . . . . . . . . 295
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303
Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 317

1
Basic Theory of Electromagnetic Scattering
This chapter is devoted to present the fundamentals of the electromagneticscattering theory which are relevant in the analysis of the null-field method.We begin with a brief discussion on the physical background of Maxwell’sequations and establish vector spherical wave expansions for the incident field.We then derive new systems of vector functions for internal field approxi-mations by analyzing wave propagation in isotropic, anisotropic and chiralmedia, and present the T -matrix formulation for electromagnetic scattering.We decided to leave out some technical details in the presentation. Therefore,the integral and orthogonality relations, the addition theorems and the basicproperties of the scalar and vector spherical wave functions are reviewed inAppendices A and B.
1.1 Maxwell’s Equations and Constitutive Relations
In this section, we formulate the Maxwell equations that govern the behav-ior of the electromagnetic fields. We present the fundamental laws of elec-tromagnetism, derive the boundary conditions and describe the propertiesof isotropic, anisotropic and chiral media by constitutive relations. Our pre-sentation follows the treatment of Kong [122] and Mishchenko et al. [169].Other excellent textbooks on classical electrodynamics and optics have beengiven by Stratton [215], Tsang et al. [228], Jackson [110], van de Hulst [105],Kerker [115], Bohren and Huffman [17], and Born and Wolf [19].
The behavior of the macroscopic field at interior points in material mediais governed by Maxwell’s equations:
∇× E = −∂B
∂t(Faraday’s induction law) , (1.1)
∇× H = J +∂D
∂t(Maxwell–Ampere law) , (1.2)
∇ · D = ρ (Gauss’ electric field law) , (1.3)

2 1 Basic Theory of Electromagnetic Scattering
∇ · B = 0 (Gauss’ magnetic field law) , (1.4)
where t is time, E the electric field, H the magnetic field, B the magneticinduction, D the electric displacement and ρ and J the electric charge densityand current density, respectively. The first three equations in Maxwell’s theoryare independent, because the Gauss magnetic field law can be obtained fromFaraday’s law by taking the divergence and by setting the integration constantwith respect to time equal to zero. Analogously, taking the divergence ofMaxwell–Ampere law and using the Gauss electric field law we obtain thecontinuity equation:
∇ · J +∂ρ
∂t= 0 , (1.5)
which expresses the conservation of electric charge. The Gauss magnetic fieldlaw and the continuity equation should be treated as auxiliary or dependentequations in the entire system of equations (1.1)–(1.5). The charge and currentdensities are associated with the so-called “free” charges, and for a source-free medium, J = 0 and ρ = 0. In this case, the Gauss electric field law canbe obtained from Maxwell–Ampere law and only the first two equations inMaxwell’s theory are independent.
In our analysis we will assume that all fields and sources are time harmonic.With ω being the angular frequency and j =
√−1, we write
E(r, t) = ReE(r)e−jωt
and similarly for other field quantities. The vector field E(r) in the frequencydomain is a complex quantity, while E(r, t) in the time domain is real. As a re-sult of the Fourier component Ansatz, the Maxwell equations in the frequencydomain become
∇× E = jωB ,
∇× H = J − jωD ,
∇ · D = ρ ,
∇ · B = 0 .
Taking into account the continuity equation in the frequency domain ∇ · J−jωρ = 0, we may express the Maxwell–Ampere law and the Gauss electricfield law as
∇× H = −jωDt ,
∇ · Dt = 0 ,
where
Dt = D +jω
J
is the total electric displacement.

1.1 Maxwell’s Equations and Constitutive Relations 3
Across the interface separating two different media the fields may be dis-continuous and a boundary condition is associated with each of Maxwell’sequations. To derive the boundary conditions, we consider a regular domainD enclosed by a surface S with outward normal unit vector n, and use thecurl theorem
∫
D
∇× a dV =∫
S
n × a dS ,
to obtain∫
S
n × E dS = jω∫
D
B dV ,
∫
S
n × H dS =∫
D
J dV − jω∫
D
D dV ,
and the Gauss theorem∫
D
∇ · a dV =∫
S
n · a dS ,
to derive∫
S
n · D dS =∫
D
ρdV ,
∫
S
n · B dS = 0 .
Note that the curl theorem follows from Gauss theorem applied to the vectorfield c × a, where c is a constant vector, and the identity ∇ · (c × a) =−c ·(∇× a). We then consider a surface boundary joining two different media1 and 2, denote by n1 the surface normal pointing toward medium 2, andassume that the surface of discontinuity is contained in D. We choose thedomain of analysis in the form of a thin slab with thickness h and area ∆S,and let the volume approach zero by letting h go to zero and then letting∆S go to zero (Fig. 1.1). Terms involving vector or dot product by n willbe dropped except when n is in the direction of n1 or −n1. Assuming thatD and B are finite in the region of integration, and that the boundary maysupport a surface current J s such that J s = limh→0 hJ , and a surface charge
∆
n1
Medium 1
Medium 2
S
h
Fig. 1.1. The surface of discontinuity and a thin slab of thickness h and area ∆S

4 1 Basic Theory of Electromagnetic Scattering
density ρs such that ρs = limh→0 hρ, we see that the tangential component ofE is continuous:
n1 × (E2 − E1) = 0 ,
the tangential component of H is discontinuous:
n1 × (H2 − H1) = J s ,
the normal component of B is continuous:
n1 · (B2 − B1) = 0 ,
and the normal component of D is discontinuous:
n1 · (D2 − D1) = ρs .
Energy conservation follows from Maxwell’s equations. The vector identity
∇ · (a × b) = b · (∇× a) − a · (∇× b)
yields the Poynting theorem in the time domain:
∇ · (E × H) + H · ∂B
∂t+ E · ∂D
∂t= −E · J ,
and the Poynting vector defined as
S = E × H
is interpreted as the power flow density. Integrating over a finite domain Dwith boundary S, and using the Gauss theorem, yields
−∫
D
E · J dV =∫
S
S · n dS +∫
D
(H · ∂B
∂t+ E · ∂D
∂t
)dV ,
where as before, n is the outward normal unit vector to the surface S. Theabove equation states that the power supplied by the sources within a volumeis equal to the sum of the increase in electromagnetic energy and the Poynt-ing’s power flowing out through the volume boundary. Poynting’s theoremcan also be derived in the frequency domain:
∇ · (E × H∗) = jω (B · H∗ − E · D∗) − E · J∗ ,
where the asterisk denotes a complex-conjugate value. The complex Poyntingvector is defined as S = E × H∗ and the term −
∫D
E · J∗ dV is interpretedas the complex power supplied by the source.
In practice, the angular frequency ω is such high that a measuring instru-ment is not capable of following the rapid oscillations of the power flow but

1.1 Maxwell’s Equations and Constitutive Relations 5
rather responds to a time average power flow. Considering the time-harmonicvector fields a and b,
a(r, t) =12[a(r)e−jωt + a∗(r)ejωt
],
b(r, t) =12[b(r)e−jωt + b∗(r)ejωt
],
we express the dot product of the vectors as
c(r, t) = a(r, t) · b(r, t)
=12Rea(r) · b∗(r) + a(r) · b(r)e−2jωt
.
Defining the time average of c as
〈c(r)〉 = limT→∞
1T
∫ T
0
c(r, t) dt ,
where T is a time interval, we derive
〈c(r)〉 =12Re a(r) · b∗(r) ,
while for the cross product of the vectors
c(r, t) = a(r, t) × b(r, t) ,
we similarly obtain
〈c(r)〉 =12Re a(r) × b∗(r) .
Thus, the time average of the dot or cross product of two time-harmoniccomplex quantities is equal to half of the real part of the respective productof one quantity and the complex conjugate of the other. In this regard, thetime-averaged Poynting vector is given by
〈S〉 =12Re E × H∗ .
The three independent vector equations (1.1)–(1.3) are equivalent to sevenscalar differential equations, while the number of unknown scalar functionsis 16. Obviously, the three independent equations are not sufficient to forma complete systems of equations to solve for the unknown functions, and forthis reason, the equations given by (1.1)–(1.4) are known as the indefiniteform of the Maxwell equations. Note that for a free-source medium, we havesix scalar differential equations with 12 unknown scalar functions. To makethe Maxwell equations definite we need more information and this additional

6 1 Basic Theory of Electromagnetic Scattering
information is given by the constitutive relations. The constitutive relationsprovide a description of media and give functional dependence among vectorfields. For isotropic media, the constitutive relations read as
D = εE ,
B = µH ,
J = σE (Ohm’s law) , (1.6)
where ε is the electric permittivity, µ is the magnetic permeability and σ isthe electric conductivity. The above equations provide nine scalar relationsthat make the number of unknowns and the number of equations compatible,while for a source-free medium, the first two constitutive relations guaranteethis compatibility. When the constitutive relations between the vector fieldsare specified, Maxwell equations become definite. In free space ε0 = 8.85 ×10−12 F m−1 and µ0 = 4π × 10−7 Hm−1, while in a material medium, thepermittivity and permeability are determined by the electrical and magneticproperties of the medium. A dielectric material can be characterized by afree-space part and a part depending on the polarization vector P such that
D = ε0E + P .
The polarization P symbolizes the average electric dipole moment per unitvolume and is given by
P = ε0χeE ,
where χe is the electric susceptibility. A magnetic material can also be char-acterized by a free-space part and a part depending on the magnetizationvector M ,
B = µ0H+µ0M ,
where M symbolizes the average magnetic dipole moment per unit volume,
M = χmH ,
and χm is the magnetic susceptibility. A medium is diamagnetic if µ < µ0 andparamagnetic if µ > µ0, while for a nonmagnetic medium we have µ = µ0.The permittivity and permeability of isotropic media can be written as
ε = ε0εr = ε0 (1 + χe) ,
µ = µ0µr = µ0 (1 + χm) ,
where εr and µr stand for the corresponding relative quantities. The consti-tutive relation for the total electric displacement is
Dt = εtE ,

1.1 Maxwell’s Equations and Constitutive Relations 7
where the complex permittivity εt is given by
εt = ε0εrt = ε0
(1 + χe +
jσωε0
)
with εrt being the complex relative permittivity. Both the conductivityand the susceptibility contribute to the imaginary part of the permittivity,Imεt = ε0Imχe + Reσ/ω, and a complex value for εt means that themedium is absorbing. Usually, Imχe is associated with the “bound” chargecurrent density and Reσ/ω with the “free” charge current density, and ab-sorption is determined by the sum of these two quantities. Note that for afree-source medium, σ = 0 and εrt = εr = 1 + χe. The simplest solution toMaxwell’s equations in source-free media is the vector plane wave solution.The behavior of a vector plane wave in an isotropic medium is characterizedby the dispersion relation
k = ω√
εµ ,
which relates the wave number k to the properties of the medium and to theangular frequency ω of the wave. The dimensionless quantity
m = c√
εµ
is the refractive index of the medium, where c = 1/√
ε0µ0 is the speed of lightin vacuum, and if k0 = ω
√ε0µ0 is the wave number in free space, we see that
m =k
k0.
The constitutive relations for anisotropic media are
D = εE ,
B = µH , (1.7)
where ε and µ are the permittivity and permeability tensors, respectively. Inour analysis we will consider electrically anisotropic media for which the per-mittivity is a tensor and the permeability is a scalar. Except for amorphousmaterials and crystals with cubic symmetry, the permittivity is always a ten-sor, and in general, the permittivity tensor of a crystal is symmetric. Sincethere exists a coordinate transformation that transforms a symmetric matrixinto a diagonal matrix, we can take this coordinate system as reference frameand we have
ε =
⎡
⎢⎣
εx 0 00 εy 00 0 εz
⎤
⎥⎦ . (1.8)
This reference frame is called the principal coordinate system and the threecoordinate axes are known as the principal axes of the crystal. If εx = εy = εz,

8 1 Basic Theory of Electromagnetic Scattering
the medium is biaxial, and if ε = εx = εy and ε = εz, the medium is uniaxial.Orthorhombic, monoclinic and triclinic crystals are biaxial, while tetragonal,hexagonal and rhombohedral crystals are uniaxial. For uniaxial crystals, theprincipal axis that exhibits the anisotropy is called the optic axis. The crystalis positive uniaxial if εz > ε and negative uniaxial if εz < ε.
In our analysis, we will investigate the electromagnetic response of isotropic,chiral media exposed to arbitrary external excitations. The lack of geometricsymmetry between a particle and its mirror image is referred to as chiralityor optical activity. A chiral medium is characterized by either a left- or aright-handedness in its microstructure, and as a result, left- and right-handcircularly polarized fields propagate through it with differing phase veloc-ities. For a source-free, isotropic, chiral medium, the constitutive relationsread as
D = εE + βε∇× E ,
B = µH + βµ∇× H ,
where the real number β is known as the chirality parameter. The Maxwellequations can be written compactly in matrix form as
∇×[
EH
]= K
[EH
], ∇ ·
[EH
]= 0 , (1.9)
where
K =1
1 − β2k2
[βk2 jωµ
−jωε βk2
]
and k = ω√
εµ.Without loss of generality and so as to simplify our notations we make the
following transformations:
E → 1√ε0
E,H → 1√
µ0H ,
D → √ε0D,B → √
µ0B .
As a result, the Maxwell equations for a free-source medium become more“symmetric”:
∇× E = jk0B ,
∇× H = −jk0D ,
∇ · D = 0 ,
∇ · B = 0 , (1.10)
the constitutive relations are given by (1.6) and (1.7) with ε and µ beingthe relative permittivity and permeability, respectively, the wave number isk = k0
√εµ, and the K matrix in (1.9) takes the form
K =1
1 − β2k2
[βk2 jk0µ
−jk0ε βk2
]. (1.11)

1.2 Incident Field 9
1.2 Incident Field
In this section, we characterize the polarization state of vector plane wavesand derive vector spherical wave expansions for the incident field. The firsttopic is relevant in the analysis of the scattered field, while the second oneplays an important role in the derivation of the transition matrix.
1.2.1 Polarization
In addition to intensity and frequency, a monochromatic (time harmonic)electromagnetic wave is characterized by its state of polarization. This conceptis useful when we discuss the polarization of the scattered field since thepolarization state of a beam is changed on interaction with a particle.
We consider a right-handed Cartesian coordinate system OXY Z with afixed spatial orientation. This reference frame will be referred to as the globalcoordinate system or the laboratory coordinate system. The direction of prop-agation of the vector plane wave is specified by the unit vector ek, or equiva-lently, by the zenith and azimuth angles β and α, respectively (Fig. 1.2). Thepolarization state of the incident wave will be described in terms of the verticalpolarization unit vector eα = ez×ek/|ez×ek| and the horizontal polarizationvector eβ = eα × ek. Note that other names for vertical polarization are TMpolarization, parallel polarization and p polarization, while other names forhorizontal polarization are TE polarization, perpendicular polarization and spolarization.
eβ
e
ek
x
yO
z
ke
β
α
epol
α
α
pol
Fig. 1.2. Wave vector in the global coordinate system

10 1 Basic Theory of Electromagnetic Scattering
In the frequency domain, a vector plane wave propagating in a mediumwith constant wave number ks = k0
√εsµs is given by
Ee(r) = Ee0ejke·r , Ee0 · ek = 0 , (1.12)
where k0 is the wave number in free space, ke is the wave vector, ke = ksek,Ee0 is the complex amplitude vector,
Ee0 = Ee0,βeβ + Ee0,αeα ,
and Ee0,β and Ee0,α are the complex amplitudes in the β- and α-direction,respectively. An equivalent representation for Ee0 is
Ee0 = |Ee0| epol , (1.13)
where epol is the complex polarization unit vector, |epol| = 1, and
epol =1
|Ee0|(Ee0,βeβ + Ee0,αeα) .
Inserting (1.13) into (1.12), gives the representation
Ee(r) = |Ee0| epolejke·r , epol · ek = 0 ,
and obviously, |Ee(r)| = |Ee0|.There are three ways of describing the polarization state of vector plane
waves.
1. Setting
Ee0,β = aβejδβ ,
Ee0,α = aαejδα , (1.14)
where aβ and aα are the real non-negative amplitudes, and δβ and δα are thereal phases, we characterize the polarization state of a vector plane wave byaβ , aα and the phase difference ∆δ = δβ − δα.
2. Taking into account the representation of a vector plane wave in the timedomain
Ee(r, t) = ReEe(r)e−jωt
= Re
Ee0ej(ke·r−ωt)
,
where Ee(r, t) is the real electric vector, we deduce that (cf. (1.14))
Ee,β(r, t) = aβ cos (δβ + ke · r − ωt) ,
Ee,α(r, t) = aα cos (δα + ke · r − ωt) ,
where
Ee(r, t) = Ee,β(r, t)eβ + Ee,α(r, t)eα .

1.2 Incident Field 11
At any fixed point in space the endpoint of the real electric vector describesan ellipse which is also known as the vibration ellipse [17]. The vibrationellipse can be traced out in two opposite senses: clockwise and anticlock-wise. If the real electric vector rotates clockwise, as viewed by an observerlooking in the direction of propagation, the polarization of the ellipse isright-handed and the polarization is left-handed if the electric vector rotatesanticlockwise. The two opposite senses of rotation lead to a classification ofvibration ellipses according to their handedness. In addition to its handed-ness, a vibration ellipse is characterized by E0 =
√a2 + b2, where a and
b are the semi-major and semi-minor axes of the ellipse, the orientationangle ψ and the ellipticity angle χ (Fig. 1.3). The orientation angle ψ isthe angle between the α-axis and the major axis, and ψ ∈ [0, π). The ellipticityangle χ is usually expressed as tan χ = ±b/a, where the plus sign correspondsto right-handed elliptical polarization, and χ ∈ [−π/4, π/4].
We now proceed to relate the complex amplitudes Ee0,β and Ee0,α tothe ellipsometric parameters E0, ψ and χ. Representing the semi-axes of thevibration ellipse as
b = ±E0 sin χ ,
a = E0 cos χ , (1.15)
where the plus sign corresponds to right-handed polarization, and taking intoaccount the parametric representation of the ellipse in the principal coordinatesystem Oα′β′
E′e,β(r, t) = ±b sin (ke · r − ωt) ,
E′e,α(r, t) = a cos (ke · r − ωt) ,
O
α
α
ββ
ab ψ
χ
Fig. 1.3. Vibration ellipse

12 1 Basic Theory of Electromagnetic Scattering
we obtain
E′e,β(r, t) = E0 sinχ sin (ke · r − ωt) = E0 sin χ cos
(ke · r − ωt − π
2
),
E′e,α(r, t) = E0 cos χ cos (ke · r − ωt) .
In the frequency domain, the complex amplitude vector E′e0 defined as
E′e(r, t) = Re
E′
e0ej(ke·r−ωt)
,
where
E′e(r, t) = E′
e,β(r, t)e′β + E′
e,α(r, t)e′α ,
has the components
E′e0,β = −jE0 sinχ ,
E′e0,α = E0 cos χ .
Using the transformation rule for rotation of a two-dimensional coordinatesystem we obtain the desired relations
Ee0,β = E0 (cos χ sinψ − j sin χ cos ψ) ,
Ee0,α = E0 (cos χ cos ψ + j sinχ sin ψ) ,
and
epol = (cos χ sin ψ − j sin χ cos ψ) eβ
+ (cos χ cos ψ + j sinχ sin ψ)eα . (1.16)
If b = 0, the ellipse degenerates into a straight line and the wave is linearlypolarized. In this specific case χ = 0 and
Ee0,β = E0 sin ψ = E0 cos(π
2− ψ)
= E0 cos αpol ,
Ee0,α = E0 cos ψ = E0 sin(π
2− ψ)
= E0 sinαpol ,
where αpol is the polarization angle and
αpol = π/2 − ψ , αpol ∈ (−π/2, π/2] . (1.17)
In view of (1.16) and (1.17) it is apparent that the polarization unit vector isreal and is given by
epol = cos αpoleβ + sin αpoleα . (1.18)

1.2 Incident Field 13
If a = b, the ellipse is a circle and the wave is circularly polarized. We havetan χ = ±1, which implies χ = ±π/4, and choosing ψ = π/2, we obtain
Ee0,β =√
22
E0 ,
Ee0,α = ±j√
22
E0 .
The polarization unit vectors of right- and left-circularly polarized waves thenbecome
eR =√
22
(eβ + jeα) ,
eL =√
22
(eβ − jeα) ,
and we see that these basis vectors are orthonormal in the sense thateR · e∗
R = 1, eL · e∗L = 1 and eR · e∗
L = 0.
3. The polarization characteristics of the incident field can also be describedby the coherency and Stokes vectors. Although the ellipsometric parameterscompletely specify the polarization state of a monochromatic wave, they aredifficult to measure directly (with the exception of the intensity E2
0). In con-trast, the Stokes parameters are measurable quantities and are of greaterusefulness in scattering problems. The coherency vector is defined as
Je =12
√εs
µs
⎡
⎢⎢⎢⎣
Ee0,βE∗e0,β
Ee0,βE∗e0,α
Ee0,αE∗e0,β
Ee0,αE∗e0,α
⎤
⎥⎥⎥⎦
, (1.19)
while the Stokes vector is given by
Ie =
⎡
⎢⎢⎢⎣
Ie
Qe
Ue
Ve
⎤
⎥⎥⎥⎦
= DJe =12
√εs
µs
⎡
⎢⎢⎢⎢⎣
|Ee0,β |2 + |Ee0,α|2
|Ee0,β |2 − |Ee0,α|2
−Ee0,αE∗e0,β − Ee0,βE∗
e0,α
j(Ee0,αE∗
e0,β − Ee0,βE∗e0,α
)
⎤
⎥⎥⎥⎥⎦
, (1.20)
where D is a transformation matrix and
D =
⎡
⎢⎢⎣
1 0 0 11 0 0 −10 −1 −1 00 −j j 0
⎤
⎥⎥⎦ . (1.21)

14 1 Basic Theory of Electromagnetic Scattering
The first Stokes parameter Ie,
Ie =12
√εs
µs|Ee0|2
is the intensity of the wave, while the Stokes parameters Qe, Ue and Ve describethe polarization state of the wave. The Stokes parameters are defined withrespect to a reference plane containing the direction of wave propagation, andQe and Ue depend on the choice of the reference frame. If the unit vectors eβ
and eα are rotated through an angle ϕ (Fig. 1.4), the transformation from theStokes vector Ie to the Stokes vector I ′
e (relative to the rotated unit vectorse′
β and e′α) is given by
I ′e = L (ϕ) Ie , (1.22)
where the Stokes rotation matrix L is
L (ϕ) =
⎡
⎢⎢⎣
1 0 0 00 cos 2ϕ − sin 2ϕ 00 sin 2ϕ cos 2ϕ 00 0 0 1
⎤
⎥⎥⎦ . (1.23)
The Stokes parameters can be expressed in terms of aβ , aα and ∆δ as (omit-ting the factor 1
2
√εs/µs)
Ie = a2β + a2
α ,
Qe = a2β − a2
α ,
Ue = −2aβaα cos ∆δ ,
Ve = 2aβaα sin ∆δ ,
eβ
eα
ϕ
eβ
eα
O
Fig. 1.4. Rotation of the polarization unit vectors through the angle ϕ

1.2 Incident Field 15
and in terms of E0, ψ and χ, as
Ie = E20 ,
Qe = −E20 cos 2χ cos 2ψ ,
Ue = −E20 cos 2χ sin 2ψ ,
Ve = −E20 sin 2χ .
The above relations show that the Stokes parameters carry information aboutthe amplitudes and the phase difference, and are operationally defined in termsof measurable quantities (intensities). For a linearly polarized plane wave,χ = 0 and Ve = 0, while for a circularly polarized plane wave, χ = ±π/4and Qe = Ue = 0. Thus, the Stokes vector of a linearly polarized wave ofunit amplitude is given by Ie = [1, cos 2αpol,− sin 2αpol, 0]T, while the Stokesvector of a circularly polarized wave of unit amplitude is Ie = [1, 0, 0,∓1]T.
The Stokes parameters of a monochromatic plane wave are not indepen-dent since
I2e = Q2
e + U2e + V 2
e , (1.24)
and we may conclude that only three parameters are required to characterizethe state of polarization. For quasi-monochromatic light, the amplitude of theelectric field fluctuate in time and the Stokes parameters are expressed interms of the time-averaged quantities 〈Ee0,pE
∗e0,q〉, where p and q stand for β
and α. In this case, the equality in (1.24) is replaced by the inequality
I2e ≥ Q2
e + U2e + V 2
e ,
and the quantity
P =
√Q2
e + U2e + V 2
e
Ie
is known as the degree of polarization of the quasi-monochromatic beam. Fornatural (unpolarized) light, P = 0, while for fully polarized light P = 1. TheStokes vector defined by (1.20) is one possible representation of polarization.Other representations are discussed by Hovenier and van der Mee [101], while adetailed discussion of the polarimetric definitions can be found in [17,169,171].
1.2.2 Vector Spherical Wave Expansion
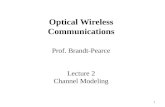
The derivation of the transition matrix in the framework of the null-fieldmethod requires the expansion of the incident field in terms of (localized)vector spherical wave functions. This expansion must be provided in the parti-cle coordinate system, where in general, the particle coordinate system Oxyzis obtained by rotating the global coordinate system OXY Z through theEuler angles αp, βp and γp (Fig. 1.5). In our analysis, vector plane waves andGaussian beams are considered as external excitations.

16 1 Basic Theory of Electromagnetic Scattering
y
2
Y
Z, z
O
1
βp
αppγ 1
2
y1, y2
x
X x
x
z, z
Fig. 1.5. Euler angles αp, βp and γp specifying the orientation of the particlecoordinate system Oxyz with respect to the global coordinate system OXY Z. Thetransformation OXY Z → Oxyz is achieved by means of three successive rotations:(1) rotation about the Z-axis through αp, OXY Z → Ox1y1z1, (2) rotation aboutthe y1-axis through βp, Ox1y1z1 → Ox2y2z2 and (3) rotation about the z2-axisthrough γp, Ox2y2z2 → Oxyz
Vector Plane Wave
We consider a vector plane wave of unit amplitude propagating in the direction(βg, αg) with respect to the global coordinate system. Passing from sphericalcoordinates to Cartesian coordinates and using the transformation rules undercoordinate rotations we may compute the spherical angles β and α of thewave vector in the particle coordinate system. Thus, in the particle coordinatesystem we have the representation
Ee(r) = epolejke·r , epol · ek = 0 ,
where as before, ke = ksek.The vector spherical waves expansion of the incident field reads as
Ee(r) =∞∑
n=1
n∑
m=−n
amnM1mn (ksr) + bmnN1
mn (ksr) , (1.25)
where the expansion coefficients are given by [9,228]
amn = 4jnepol · m∗mn(β, α)
= − 4jn√
2n(n + 1)epol ·
[jmπ|m|
n (β)eβ + τ |m|n (β)eα
]e−jmα ,

1.2 Incident Field 17
bmn = −4jn+1epol · n∗mn(β, α)
= − 4jn+1
√2n(n + 1)
epol ·[τ |m|n (β)eβ − jmπ|m|
n (β)eα
]e−jmα . (1.26)
To give a justification of the above expansion we consider the integral repre-sentation
epol(β, α)ejke(β,α)·r =∫ 2π
0
∫ π
0
epol(β, α)ejk(β′,α′)·r
×δ(α′ − α)δ(cos β′ − cos β) sin β′ dβ′ dα′ , (1.27)
and expand the tangential field
f (β, α, β′, α′) = epol(β, α)δ(α′ − α)δ(cos β′ − cos β) (1.28)
in vector spherical harmonics
f (β, α, β′, α′) =1
4πjn
∞∑
n=1
n∑
m=−n
amnmmn (β′, α′)+jbmnnmn (β′, α′) . (1.29)
Using the orthogonality relations of vector spherical harmonics we see thatthe expansion coefficients amn and bmn are given by
amn = 4jn∫ 2π
0
∫ π
0
f (β, α, β′, α′) · m∗mn (β′, α′) sin β′ dβ′ dα′
= 4jnepol(β, α) · m∗mn(β, α) ,
bmn = −4jn+1
∫ 2π
0
∫ π
0
f (β, α, β′, α′) · n∗mn (β′, α′) sin β′ dβ′ dα′
= −4jn+1epol(β, α) · n∗mn(β, α) .
Substituting (1.28) and (1.29) into (1.27) and taking into account the integralrepresentations for the regular vector spherical wave functions (cf. (B.26) and(B.27)) yields (1.25).
The polarization unit vector of a linearly polarized vector plane wave isgiven by (1.18). If the vector plane wave propagates along the z-axis we haveβ = α = 0 and for β = 0, the spherical vector harmonics are zero unless m =±1. Using the special values of the angular functions π1
n and τ1n when β = 0,
π1n (0) = τ1
n (0) =1
2√
2
√n(n + 1)(2n + 1) ,
we obtain
a±1n = −jn√
2n + 1 (±j cos αpol + sin αpol) ,
b±1n = −jn+1√
2n + 1 (cos αpol ∓ j sin αpol) .

18 1 Basic Theory of Electromagnetic Scattering
Thus, for a vector plane wave polarized along the x-axis we have
a1n = −a−1n = jn−1√
2n + 1 ,
b1n = b−1n = jn−1√
2n + 1 ,
while for a vector plane wave polarized along the y-axis we have
a1n = a−1n = jn−2√
2n + 1 ,
b1n = −b−1n = jn−2√
2n + 1 .
Gaussian Beam
Many optical particle sizing instruments and particle characterization meth-ods are based on scattering by particles illuminated with laser beams.A laser beam has a Gaussian intensity distribution and the often usedappellation Gaussian beam appears justified. A mathematical description ofa Gaussian beam relies on Davis approximations [45]. An nth Davis beamcorresponds to the first n terms in the series expansion of the exact solutionto the Maxwell equations in power of the beam parameter s,
s =w0
l,
where w0 is the waist radius and l is the diffraction length, l = ksw20. According
to Barton and Alexander [9], the first-order approximation is accurate tos < 0.07, while the fifth-order is accurate to s < 0.02, if the maximum percenterror of the solution is less than 1.2%. Each nth Davis beam appears underthree versions which are: the mathematical conservative version, the L-versionand the symmetrized version [145]. None of these beams are exact solutionsto the Maxwell equations, so that each nth Davis beam can be considered asa “pseudo-electromagnetic” field.
In the T -matrix method a Gaussian beam is expanded in terms of vectorspherical wave functions by replacing the pseudo-electromagnetic field of annth Davis beam by an equivalent electromagnetic field, so that both fieldshave the same values on a spherical surface [81, 83, 85]. As a consequenceof the equivalence method, the expansion coefficients (or the beam shapecoefficients) are computed by integrating the incident field over the spher-ical surface. Because these fields are rapidly varying, the evaluation of thecoefficients by numerical integration requires dense grids in both the θ- andϕ-direction and the computer run time is excessively long.
For weakly focused Gaussian beams, the generalized localized approxima-tion to the beam shape coefficients represents a pleasing alternative (see, forinstance, [84, 87]). The form of the analytical approximation was found inpart by analogy to the propagation of geometrical light rays and in part bynumerical experiments. This is not a rigorous method but its use simplifiesand significantly speeds up the numerical computations. A justification of

1.2 Incident Field 19
the localized approximations for both on- and off-axis beams has been givenby Lock and Gouesbet [145] and Gouesbet and Lock [82]. We note that thefocused beam generated by the localized approximation is a good approxima-tion to a Gaussian beam for s ≤ 0.1.
We consider the geometry depicted in Fig. 1.6 and assume that the middleof the beam waist is located at the point Ob. The particle coordinate systemOxyz and the beam coordinate system Obxbybzb have identical spatial orien-tation, and the position vector of the particle center O in the system Obxbybzb
is denoted by r0. The Gaussian beam is of unit amplitude, propagates alongthe zb-axis and is linearly polarized along the xb-axis. In the particle coor-dinate system, the expansion of the Gaussian beam in vector spherical wavefunctions is given by
Ee(r) =∞∑
n=1
n∑
m=−n
amnM1mn (ksr) + bmnN1
mn (ksr) ,
and the generalized localized approximation to the Davis first-order beam is
amn = KmnΨ0ejksz0
[ej(m−1)ϕ0Jm−1 (u) − ej(m+1)ϕ0Jm+1 (u)
],
bmn = KmnΨ0ejksz0
[ej(m−1)ϕ0Jm−1 (u) + ej(m+1)ϕ0Jm+1 (u)
],
x b
by bO
O
zb
r0
ϕ0
z0
ρ0
y
x
z
2w0
Fig. 1.6. The particle coordinate system Oxyz and the beam coordinate systemOxbybzb have the same spatial orientation

20 1 Basic Theory of Electromagnetic Scattering
where (ρ0, ϕ0, z0) are the cylindrical coordinates of r0,
Ψ0 = jQ exp(−jQ
ρ20 + ρ2
n
w20
), Q =
1j − 2z0/l
, ρn =1ks
(n +
12
),
and
u = 2Qρ0ρn
w20
.
The normalization constant Kmn is given by
Kmn = 2jn√
n(n + 1)2n + 1
for m = 0, and by
Kmn = (−1)|m| jn+|m|(n + 1
2
)|m|−1
√2n + 1
n(n + 1)· (n + |m|)!(n − |m|)!
for m = 0. If both coordinate systems coincide (ρ0 = 0), all expansion coeffi-cients are zero unless m = ±1 and
a1n = −a−1n = jn−1√
2n + 1 exp(− ρ2
n
w20
),
b1n = b−1n = jn−1√
2n + 1 exp(− ρ2
n
w20
).
The Gaussian beam becomes a plane wave if w0 tends to infinity and for thisspecific case, the expressions of the expansion coefficients reduce to those ofa vector plane wave.
We next consider the general situation depicted in Fig. 1.7 and assumethat the auxiliary coordinate system ObXbYbZb and the global coordinatesystem OXY Z have the same spatial orientation. The Gaussian beam propa-gates in a direction characterized by the zenith and azimuth angles βg and αg,respectively, while the polarization unit vector encloses the angle αpol withthe xb-axis of the beam coordinate system Obxbybzb. As before, the parti-cle coordinate system is obtained by rotating the global coordinate systemthrough the Euler angles αp, βp and γp. The expansion of the Gaussian beamin the particle coordinate system is obtained by using the addition theoremfor vector spherical wave functions under coordinate rotations (cf. (B.52) and(B.53)), and the result is
Ee(r) =∞∑
n=1
n∑
m=−n
amnM1mn (ksr) + bmnN1
mn (ksr) ,

1.3 Internal Field 21
xb
yb
O b
zb
y
x
z
O
X
Y
Z
Yb
Xb
Zb
βp
βg
r0
Fig. 1.7. General orientations of the particle and beam coordinate systems
where
amn =n∑
m′=−n
n∑
m′′=−n
Dnm′m′′ (−αpol,−βg,−αg) Dn
m′′m (αp, βp, γp) am′n ,
bmn =n∑
m′=−n
n∑
m′′=−n
Dnm′m′′ (−αpol,−βg,−αg) Dn
m′′m (αp, βp, γp) bm′n ,
and the Wigner D-functions Dnm′′m are given by (B.34).
Remark. Another representation of a Gaussian beam is the integral repre-sentation over plane waves [48, 116]. This can be obtained by using Fourieranalysis and by replacing the pseudo-vector potential of a nth Davis beamby an equivalent vector potential (satisfying the wave equation), so that bothvector fields have the same values in a plane z = const.
1.3 Internal Field
To solve the scattering problem in the framework of the null-field method itis necessary to approximate the internal field by a suitable system of vectorfunctions. For isotropic particles, regular vector spherical wave functions ofthe interior wave equation are used for internal field approximations. In thissection we derive new systems of vector functions for anisotropic and chiralparticles by representing the electromagnetic fields (propagating in anisotropic

22 1 Basic Theory of Electromagnetic Scattering
and chiral media) as integrals over plane waves. For each plane wave, we solvethe Maxwell equations and derive the dispersion relation following the treat-ment of Kong [122]. The dispersion relation which relates the amplitude ofthe wave vector k to the properties of the medium enable us to reduce thethree-dimensional integrals to two-dimensional integrals over the unit sphere.The integral representations are then transformed into series representationsby expanding appropriate tangential vector functions in vector spherical har-monics. The new basis functions are the vector quasi-spherical wave functions(for anisotropic media) and the vector spherical wave functions of left- andright-handed type (for chiral media).
1.3.1 Anisotropic Media
Maxwell equations describing electromagnetic wave propagation in a source-free, electrically anisotropic medium are given by (1.10), while the constitutiverelations are given by (1.7) with the scalar permeability µ in place of thepermeability tensor µ. In the principal coordinate system, the first constitutiverelation can be written as
E = λD ,
where the impermittivity tensor λ is given by
λ =
⎡
⎣λx 0 00 λy 00 0 λz
⎤
⎦ ,
and λx = 1/εx, λy = 1/εy and λz = 1/εz.The electromagnetic fields can be expressed as integrals over plane waves
by considering the inverse Fourier transform (excepting the factor 1/(2π)3):
A(r) =∫
A (k) ejk·r dV (k) ,
where A stands for E, D, H and B, and A stands for the Fourier transformsE , D, H and B. Using the identities
∇× A(r) = j∫
k ×A (k) ejk·r dV (k) ,
∇ · A(r) = j∫
k · A (k) ejk·r dV (k) ,
we see that the Maxwell equations for the Fourier transforms take the forms
k × E = k0B , k ×H = −k0D ,
k · D = 0 , k · B = 0 ,

1.3 Internal Field 23
and the plane wave solutions read as
Eβ =k0
kBα , Eα = −k0
kBβ ,
Hβ = −k0
kDα , Hα =
k0
kDβ ,
Dk = 0 , Bk = 0 , (1.30)
where (k, β, α) and (ek,eβ ,eα) are the spherical coordinates and the sphericalunit vectors of the wave vector k, respectively, and in general, (Ak,Aβ ,Aα)are the spherical coordinates of the vector A. The constitutive relations forthe transformed fields E = λD and H = (1/µ)B can be written in sphericalcoordinates by using the transformation
⎡
⎣Ax
Ay
Az
⎤
⎦ =
⎡
⎣cos α sin β cos α cos β − sin αsin α sinβ sin α cos β cos α
cos β − sin β 0
⎤
⎦
⎡
⎣Ak
Aβ
Aα
⎤
⎦ ,
and the result is
Ek = λkβDβ + λkαDα ,
Eβ = λββDβ + λβαDα ,
Eα = λαβDβ + λααDα , (1.31)
andHk = 0 , Hβ =
1µBβ , Hα =
1µBα , (1.32)
where
λkβ =(λx cos2 α + λy sin2 α − λz
)sin β cos β ,
λkα = (λy − λx) sin α cos α sinβ ,
λββ =(λx cos2 α + λy sin2 α
)cos2 β + λz sin2 β ,
λβα = (λy − λx) sin α cos α cos β ,
and
λαβ = λβα ,
λαα = λx sin2 α + λy cos2 α .
Equations (1.30) and (1.32) are then used to express Eβ , Eα and Hβ , Hα interms of Dβ , Dα, and we obtain
Eβ = µk20
k2Dβ , Eα = µ
k20
k2Dα ,
Hβ = −k0
kDα , Hα =
k0
kDβ . (1.33)

24 1 Basic Theory of Electromagnetic Scattering
The last two equations in (1.31) and the first two equations in (1.33) yield ahomogeneous system of equations for Dβ and Dα
[λββ − µ
k20
k2 λβα
λβα λαα − µk20
k2
] [Dβ
Dα
]= 0 . (1.34)
Requiring nontrivial solutions we set the determinant equal to zero and obtaintwo values for the wave number k2,
k21,2 = k2
0
µ
λ1,2,
where
λ1 =12
[(λββ + λαα) −
√(λββ − λαα)2 + 4λ2
βα
],
and
λ2 =12
[(λββ + λαα) +
√(λββ − λαα)2 + 4λ2
βα
].
The above relations are the dispersion relations for the extraordinary waves,which are the permissible characteristic waves in anisotropic media. For anextraordinary wave, the magnitude of the wave vector depends on the direc-tion of propagation, while for an ordinary wave, k is independent of β andα. Straightforward calculations show that for real values of λx, λy and λz,λββλαα > λ2
βα and as a result λ1 > 0 and λ2 > 0. The two characteristicwaves, corresponding to the two values of k2, have the D vectors orthogonalto each other, i.e., D(1) · D(2) = 0. In view of (1.34) it is apparent that thecomponents of the vectors D(1) and D(2) can be expressed in terms of twoindependent scalar functions Dα and Dβ . For k1 = k0
√µ/λ1 we set
D(1)β = fDα , D(1)
α = Dα ,
while for k2 = k0
√µ/λ2 we choose
D(2)β = −Dβ , D(2)
α = fDβ ,
where
f = −λβα
∆λ
and
∆λ =12
[(λββ − λαα) +
√(λββ − λαα)2 + 4λ2
βα
].
Next, we define the tangential fields
vα = feβ + eα ,
vβ = −eβ + feα ,

1.3 Internal Field 25
and note that the vectors vα and vβ are orthogonal to each other, vα ·vβ = 0,and vα = −ek × vβ and vβ = ek × vα. Taking into account that k1 (ek) =k1 (ek) ek and k2 (ek) = k2 (ek) ek, we find the following integral representa-tion for the electric displacement:
D(r) =∫
Ω
[Dα (ek) vα (ek) ejk1(ek)·r + Dβ (ek) vβ (ek) ejk2(ek)·r
]dΩ (ek) ,
with Ω being the unit sphere. The result, the integral representation for theelectric field is
E(r) =1
εxy
×∫
Ω
[Dα (ek) we
α (ek) ejk1(ek)·r −Dβ (ek) weβ (ek) ejk2(ek)·r
]dΩ (ek) ,
where
εxy =12
(εx + εy) ,
and
weα = εxy [(λkβf + λkα) ek + λ1vα] ,
weβ = εxy [(λkβ − λkαf) ek − λ2vβ ] ,
while for the magnetic field, we have
H(r) = − 1√
εxyµ
∫
Ω
[Dα (ek) wh
α (ek) ejk1(ek)·r
+ Dβ (ek) whβ (ek) ejk2(ek)·r
]dΩ (ek) ,
where
whα = −
√εxyλ1vβ ,
whβ =√
εxyλ2vα .
For uniaxial anisotropic media we set λ = λx = λy, derive the relations
λkβ = (λ − λz) sinβ cos β , λkα = 0 ,
λββ = λ cos2 β + λz sin2 β , λβα = 0 ,
λαβ = 0 , λαα = λ ,
and use the identities λ1 = λαα and λ2 = λββ , to obtain
k21 = k2
0εµ , (1.35)
k22 = k2
0
εµ
cos2 β + εεz
sin2 β, (1.36)

26 1 Basic Theory of Electromagnetic Scattering
where λ = 1/ε and λz = 1/εz. Equation (1.35) is the dispersion relation forordinary waves, while (1.36) is the dispersion relation for extraordinary waves.For f = 0 it follows that D(1)
β = 0 and D(2)α = 0, and further that D(1)
α = Dα
and D(2)β = −Dβ . The electric displacement is then given by
D(r) =∫ 2π
0
∫ π
0
[Dα(β, α)eαejk1(β,α)·r −Dβ(β, α)eβejk2(β,α)·r
]sinβ dβ dα ,
(1.37)where k1(β, α) = k1ek(β, α), k2(β, α) = k2(β)ek(β, α), and for notation sim-plification, the dependence of the spherical unit vectors eα and eβ on thespherical angles β and α is omitted. For εxy = ε, the integral representationsfor the electric and magnetic fields become
E(r) =1ε
∫ 2π
0
∫ π
0
Dα(β, α)eαejk1(β,α)·r (1.38)
− ε [λkβ(β)ek + λββ(β)eβ ]Dβ(β, α)ejk2(β,α)·r
sinβ dβ dα ,
and
H(r) = − 1√
εµ
∫ 2π
0
∫ π
0
[Dα(β, α)eβejk1(β,α)·r
+√
ελββ(β)Dβ(β, α)eαejk2(β,α)·r]
sinβ dβ dα , (1.39)
respectively. For isotropic media, the only nonzero λ functions are λββ andλαα, and we have λββ = λαα = λ. The two waves degenerate into one (ordi-nary) wave, i.e., k1 = k2 = k, and the dispersion relation is
k2 = k20εµ .
Next we proceed to derive series representations for the electric and mag-netic fields propagating in uniaxial anisotropic media. On the unit sphere, thetangential vector function Dα(β, α)eα −Dβ(β, α)eβ can be expanded in termsof the vector spherical harmonics mmn and nmn as follows:
Dα(β, α)eα −Dβ(β, α)eβ = −ε∞∑
n=1
n∑
m=−n
14πjn+1
[−jcmnmmn(β, α)
+ dmnnmn(β, α)] . (1.40)
Because the system of vector spherical harmonics is orthogonal and completein L2(Ω), the series representation (1.40) is valid for any tangential vectorfield. Taking into account the expressions of the vector spherical harmonics(cf. (B.8) and (B.9)) we deduce that the expansions of Dβ and Dα are given by

1.3 Internal Field 27
−Dβ(β, α) = −ε∞∑
n=1
n∑
m=−n
14πjn+1
1√
2n(n + 1)
[mπ|m|
n (β)cmn
+ τ |m|n (β)dmn
]ejmα
and
Dα(β, α) = −ε∞∑
n=1
n∑
m=−n
14πjn+1
1√
2n(n + 1)
[jτ |m|
n (β)cmn
+ jmπ|m|n (β)dmn
]ejmα ,
respectively. Inserting the above expansions into (1.38) and (1.39), yields theseries representations
E(r) =∞∑
n=1
n∑
m=−n
cmnXemn(r) + dmnY e
mn(r) , (1.41)
H(r) = −j√
ε
µ
∞∑
n=1
n∑
m=−n
cmnXhmn(r) + dmnY h
mn(r) , (1.42)
where the new vector functions are defined as
Xemn(r) = − 1
4πjn+1
1√
2n(n + 1)
∫ 2π
0
∫ π
0
jτ |m|
n (β)ejk1(β,α)·reα
+ ε [λkβ(β)ek + λββ(β)eβ ] mπ|m|n (β)ejk2(β,α)·r
×ejmα sinβ dβ dα , (1.43)
Y emn(r) = − 1
4πjn+1
1√
2n(n + 1)
∫ 2π
0
∫ π
0
jmπ|m|
n (β)ejk1(β,α)·reα (1.44)
+ ε [λkβ(β)ek + λββ(β)eβ ] τ |m|n (β)ejk2(β,α)·r
ejmα sin β dβ dα ,
Xhmn(r) = − 1
4πjn+1
1√
2n(n + 1)
∫ 2π
0
∫ π
0
[τ |m|n (β)ejk1(β,α)·reβ (1.45)
+ j√
ελββ(β)mπ|m|n (β)ejk2(β,α)·reα
]ejmα sin β dβ dα ,
and
Y hmn(r) = − 1
4πjn+1
1√
2n(n + 1)
∫ 2π
0
∫ π
0
[mπ|m|
n (β)ejk1(β,α)·reβ
+ j√
ελββ(β)τ |m|n (β)ejk2(β,α)·reα
]ejmα sin β dβ dα . (1.46)

28 1 Basic Theory of Electromagnetic Scattering
In (1.38)–(1.39), the electromagnetic fields are expressed in terms of theunknown scalar functions Dα and Dβ , while in (1.41) and (1.42), the electro-magnetic fields are expressed in terms of the unknown expansion coefficientscmn and dmn. These unknowns will be determined from the boundary condi-tions for each specific scattering problem. The vector functions Xe,h
mn and Y e,hmn
can be regarded as a generalization of the regular vector spherical wave func-tions M1
mn and N1mn. For isotropic media, we have ελββ = 1, λkβ = 0 and
k1 = k2 = k, and we see that both systems of vector functions are equivalent:
Xemn(r) = Y h
mn(r) = M1mn(kr) ,
Y emn(r) = Xh
mn(r) = N1mn(kr) . (1.47)
As a result, we obtain the familiar expansions of the electromagnetic fields interms of vector spherical wave functions of the interior wave equation:
E(r) =∞∑
n=1
n∑
m=−n
cmnM1mn (kr) + dmnN1
mn(kr) ,
H(r) = −j√
ε
µ
∞∑
n=1
n∑
m=−n
cmnN1mn (kr) + dmnM1
mn(kr) .
Although the derivation of Xe,hmn and Y e,h
mn differs from that of Kiselev et al.[119], the resulting systems of vector functions are identical except for a mul-tiplicative constant. Accordingly to Kiselev et al. [119], this system of vectorfunctions will be referred to as the system of vector quasi-spherical wave func-tions. In (1.43)–(1.46) the integration over α can be analytically performedby using the relations
ek = sin β cos αex + sinβ sin αey + cos βez ,
eβ = cos β cos αex + cos β sin αey − sin βez ,
eα = − sin αex + cos αey ,
and the standard integrals
Im (x, ϕ) =∫ 2π
0
ejx cos(α−ϕ)ejmα dα = 2πjmejmϕJm (x) ,
Icm (x, ϕ) =
∫ 2π
0
cos αejx cos(α−ϕ)ejmα dα = π[jm+1ej(m+1)ϕJm+1 (x)
+ jm−1ej(m−1)ϕJm−1 (x)]
,
Ism (x, ϕ) =
∫ 2π
0
sin αejx cos(α−ϕ)ejmα dα = −jπ[jm+1ej(m+1)ϕJm+1 (x)
− jm−1ej(m−1)ϕJm−1 (x)]
,

1.3 Internal Field 29
where (ex,ey,ez) are the Cartesian unit vectors and Jm is the cylindricalBessel functions of order m. The expressions of the Cartesian components ofthe vector function Xe
mn read as
Xemn,x(r) = − 1
4πjn+1
1√
2n(n + 1)
∫ π
0
−jτ |m|
n (β)Ism(x1, ϕ)ejy1(r,θ,β)
+ε [λββ(β) cos β + λkβ(β) sin β] mπ|m|n (β)
× Icm(x2, ϕ)ejy2(r,θ,β)
sinβ dβ (1.48)
Xemn,y(r) = − 1
4πjn+1
1√
2n(n + 1)
∫ π
0
jτ |m|
n (β)Icm(x1, ϕ)ejy1(r,θ,β)
+ε [λββ(β) cos β + λkβ(β) sin β] mπ|m|n (β)
× Ism(x2, ϕ)ejy2(r,θ,β)
sinβ dβ , (1.49)
Xemn,z(r) = − 1
4πjn+1
1√
2n(n + 1)
∫ π
0
ε [λkβ(β) cos β − λββ(β) sin β]
×mπ|m|n (β)Im(x2, ϕ)ejy2(r,θ,β) sin β dβ , (1.50)
where x1(r, θ, β) = k1r sin β sin θ, x2(r, θ, β) = k2(β)r sin β sin θ, y1(r, θ, β) =k1r cos β cos θ and y2(r, θ, β) = k2(β)r cos β cos θ, while the expressions of theCartesian components of the vector functions Y e
mn are given by (1.48)–(1.50)with mπ
|m|n and τ
|m|n interchanged. Similarly, the Cartesian components of the
vector function Xhmn are
Xhmn,x(r) = − 1
4πjn+1
1√
2n(n + 1)
∫ π
0
[τ |m|n (β) cos βIc
m(x1, ϕ)ejy1(r,θ,β)
− j√
ελββ(β)mπ|m|n (β)Is
m(x2, ϕ)ejy2(r,θ,β)
]sinβ dβ , (1.51)
Xhmn,y(r) = − 1
4πjn+1
1√
2n(n + 1)
∫ π
0
[τ |m|n (β) cos βIs
m(x1, ϕ)ejy1(r,θ,β)
+ j√
ελββ(β)mπ|m|n (β)Ic
m(x2, ϕ)ejy2(r,θ,β)
]sin β dβ , (1.52)
Xhmn,z(r) =
14πjn+1
1√
2n(n + 1)
∫ π
0
τ |m|n (β)Im(x1, ϕ)ejy1(r,θ,β) sin2 β dβ ,
(1.53)

30 1 Basic Theory of Electromagnetic Scattering
and as before, the components of the vector functions Y hmn are given by
(1.51)–(1.53) with mπ|m|n and τ
|m|n interchanged.
In the above analysis, Xe,hmn and Y e,h
mn are expressed in the principal coor-dinate system, but in general, it is necessary to transform these vector func-tions from the principal coordinate system to the particle coordinate systemthrough a rotation. The vector quasi-spherical wave functions can also bedefined for biaxial media (εx = εy = εz) by considering the expansion ofthe tangential vector function Dα(β, α)vα + Dβ(β, α)vβ in terms of vectorspherical harmonics.
1.3.2 Chiral Media
For a source-free, isotropic, chiral medium, the Maxwell equations are givenby (1.10), with the K matrix defined by (1.11). Following Bohren [16], theelectromagnetic field is transformed to
[EH
]= A
[LR
],
where A is a transformation matrix and
A =
⎡
⎣1 −j
√µε
−j√
εµ 1
⎤
⎦ .
The transformed fields L and R are the left- and right-handed circularly po-larized waves, or simply the waves of left- and right-handed types. Explicitly,the electromagnetic field transformation is
E = L − j√
µ
εR ,
H = −j√
ε
µL + R
and note that this linear transformation diagonalizes the matrix K,
Λ = A−1KA =
[k
1−βk 00 − k
1+βk
]
.
Defining the wave numbers
kL =k
1 − βk,
kR =k
1 + βk,

1.3 Internal Field 31
we see that the waves of left- and right-handed types satisfy the equations
∇× L = kLL , ∇ · L = 0 (1.54)
and∇× R = −kRR , ∇ · R = 0, (1.55)
respectively.For chiral media, we use the same technique as for anisotropic media and
express the left- and right-handed circularly polarized waves as integrals overplane waves. For the Fourier transform corresponding to waves of left-handedtype,
L(r) =∫
L (k) ejk·r dV (k) ,
the differential equations (1.54) yield
Lβ = −jkL
kLα ,
Lα = jkL
kLβ ,
and Lk = 0. The above set of equations form a system of homogeneous equa-tions and setting the determinant equal to zero, gives the dispersion relationfor the waves of left-handed type
k2 = k2L .
Choosing Lβ as an independent scalar function, we express L as
L(r) =∫ 2π
0
∫ π
0
(eβ + jeα)Lβ(β, α)ejkL(β,α)·r sinβ dβ dα , (1.56)
where kL(β, α) = kLek(β, α). The tangential field (eβ + jeα)Lβ is orthogonalto the vector spherical harmonics of right-handed type with respect to thescalar product in L2
tan(Ω) (cf. (B.16) and (B.17)), and as result, (eβ +jeα)Lβ
possesses an expansion in terms of vector spherical harmonics of left-handedtype (cf. (B.14))
(eβ + jeα)Lβ(β, α) =∞∑
n=1
n∑
m=−n
12√
2πjncmnlmn(β, α) (1.57)
=∞∑
n=1
n∑
m=−n
14πjn
cmn [mmn(β, α) + jnmn(β, α)] .

32 1 Basic Theory of Electromagnetic Scattering
Inserting (1.57) into (1.56), yields
L(r) = −∞∑
n=1
n∑
m=−n
14πjn+1
cmn
∫ 2π
0
∫ π
0
[−jmmn(β, α)
+ nmn(β, α)] ejkL(β,α)·r sinβ dβ dα ,
whence, using the integral representation for the vector spherical wave func-tions (cf. (B.26) and (B.27)), gives
L(r) =∞∑
n=1
n∑
m=−n
cmnLmn (kLr)
=∞∑
n=1
n∑
m=−n
cmn
[M1
mn (kLr) + N1mn (kLr)
],
where the vector spherical wave functions of left-handed type Lmn are de-fined as
Lmn = M1mn + N1
mn . (1.58)
For the waves of right-handed type we proceed analogously. We obtain theintegral representation
R(r) =∫ 2π
0
∫ π
0
(eβ − jeα)Rβ(β, α)ejkR(β,α)·r sinβ dβ dα
with Rβ being an independent scalar function, and the expansion
R(r) =∞∑
n=1
n∑
m=−n
dmnRmn (kRr)
=∞∑
n=1
n∑
m=−n
dmn
[M1
mn (kRr) − N1mn (kRr)
]
with the vector spherical wave functions of right-handed type Rmn beingdefined as
Rmn = M1mn − N1
mn . (1.59)
In conclusion, the electric and magnetic fields propagating in isotropic, chiralmedia possess the expansions [16,17,135]
E(r) =∞∑
n=1
n∑
m=−n
cmnLmn (kLr) − j√
µ
εdmnRmn (kRr) ,
H(r) =∞∑
n=1
n∑
m=−n
−j√
ε
µcmnLmn (kLr) + dmnRmn (kRr) .

1.4 Scattered Field 33
An exhaustive treatment of electromagnetic wave propagation in isotropic,chiral media has been given by Lakhtakia et al. [136]. This analysis deals withthe conservation of energy and momentum, properties of the infinite-mediumGreen’s function and the mathematical expression of Huygens’s principle.
1.4 Scattered Field
In this section we consider the basic properties of the scattered field as theyare determined by energy conservation and by the propagation properties ofthe fields in source-free regions. The results are presented for electromag-netic scattering by dielectric particles, which is modeled by the transmissionboundary-value problem. To formulate the transmission boundary-value prob-lem we consider a bounded domain Di (of class C2) with boundary S andexterior Ds, and denote by n the unit normal vector to S directed into Ds
(Fig. 1.8). The relative permittivity and relative permeability of the domainDt are εt and µt, where t = s, i, and the wave number in the domain Dt iskt = k0
√εtµt, where k0 is the wave number in free space. The unbounded
domain Ds is assumed to be lossless, i.e., εs > 0 and µs > 0, and the externalexcitation is considered to be a vector plane wave
Ee(r) = Ee0ejke·r , He(r) =√
εs
µsek × Ee0ejke·r ,
where Ee0 is the complex amplitude vector and ek is the unit vector in thedirection of the wave vector ke. The transmission boundary-value problemhas the following formulation.
Given Ee,He as an entire solution to the Maxwell equations representingthe external excitation, find the vector fields Es,Hs ∈ C1(Ds) ∩ C(Ds) andEi,H i ∈ C1(Di) ∩ C(Di) satisfying the Maxwell equations
∇× Et = jk0µtHt, ∇× Ht = −jk0εtEt, (1.60)
i s
n
εs, µs,
ε i, µi,
ke
k i
k s
Ee
Es
O D D
S
Fig. 1.8. The domain Di with boundary S and exterior Ds

34 1 Basic Theory of Electromagnetic Scattering
in Dt, t = s, i, and the two transmission conditions
n × Ei − n × Es = n × Ee ,
n × H i − n × Hs = n × He , (1.61)
on S. In addition, the scattered field Es,Hs must satisfy the Silver–Mullerradiation condition
r
r×√
µsHs +√
εsEs = o(
1r
), as r → ∞ , (1.62)
uniformly for all directions r/r.It should be emphasized that for the assumed smoothness conditions, the
transmission boundary-value problem possesses an unique solution [177].Our presentation is focused on the analysis of the scattered field in the
far-field region. We begin with a basic representation theorem for electro-magnetic scattering and then introduce the primary quantities which definethe single-scattering law: the far-field patterns and the amplitude matrix. Be-cause the measurement of the amplitude matrix is a complicated experimentalproblem, we characterize the scattering process by other measurable quanti-ties as for instance the optical cross-sections and the phase and extinctionmatrices.
In our analysis, we will frequently use the Green second vector theorem∫
D
[a · (∇×∇× b) − b · (∇×∇× a)] dV
=∫
S
n · [b × (∇× a) − a × (∇× b)] dS ,
where D is a bounded domain with boundary S and n is the outward unitnormal vector to S.
1.4.1 Stratton–Chu Formulas
Representation theorems for electromagnetic fields have been given by Strat-ton and Chu [216]. If Es, Hs is a radiating solution to Maxwell’s equationsin Ds, then we have the Stratton–Chu formulas(
Es(r)0
)= ∇×
∫
S
es (r′) g (ks, r, r′) dS(r′) (1.63)
+j
k0εs∇×∇×
∫
S
hs (r′) g (ks, r, r′) dS(r′) ,
(r ∈ Ds
r ∈ Di
)

1.4 Scattered Field 35
and(
Hs(r)0
)= ∇×
∫
S
hs (r′) g (ks, r, r′) dS(r′)
− jk0µs
∇×∇×∫
S
es (r′) g (ks, r, r′) dS(r′) ,
(r ∈ Ds
r ∈ Di
),
where g is the Green function and the surface fields es and hs are the tangentialcomponents of the electric and magnetic fields on the particle surface, i.e.,es = n × Es and hs = n × Hs, respectively. In the above equations we use acompact way of writing two formulas (for r ∈ Ds and for r ∈ Di) as a singleequation.
A similar result holds for vector functions satisfying the Maxwell equationsin bounded domains. With Ei, H i being a solution to Maxwell’s equations inDi we have(−Ei(r)
0
)= ∇×
∫
S
ei (r′) g (ki, r, r′) dS(r′)
+j
k0εi∇×∇×
∫
S
hi (r′) g (ki, r, r′) dS(r′) ,
(r ∈ Di
r ∈ Ds
)
and(−H i(r)
0
)= ∇×
∫
S
hi (r′) g (ki, r, r′) dS(r′)
− jk0µi
∇×∇×∫
S
ei (r′) g (ki, r, r′) dS(r′) ,
(r ∈ Di
r ∈ Ds
),
where ei = n × Ei and hi = n × H i.A rigorous proof of these representation theorems on the assumptions Es,
Hs ∈ C1(Ds) ∩C(Ds) and Ei, H i ∈ C1(Di) ∩C(Di) can be found in Coltonand Kress [39]. An alternative proof can be given if we accept the validityof Green’s second vector theorem for generalized functions such as the three-dimensional Dirac delta function δ(r − r′). To prove the representation the-orem for vector fields satisfying the Maxwell equations in bounded domainswe use the Green second vector theorem for a divergence free vector field a(∇ · a = 0). Using the vector identities ∇ × ∇ × b = −∆b + ∇∇ · b anda · (∇∇ · b) = ∇ · (a∇ · b) for ∇ · a = 0, and the Gauss divergence theoremwe see that∫
D
[a · ∆b + b · (∇×∇× a)] dV =∫
S
n · a (∇ · b) + n · [a × (∇× b)
+ (∇× a) × b]dS . (1.64)
In the above equations, the simplified notations ∇∇ · a and a∇ · b shouldbe understood as ∇(∇ · a) and a(∇ · b), respectively. Next, we choose an

36 1 Basic Theory of Electromagnetic Scattering
arbitrary constant unit vector u and apply Green’s second vector theorem(1.64) to a(r′) = Ei(r′) and b(r′) = g(ki, r
′, r)u, for r ∈ Di. Recalling that
∆′g (ki, r′, r) + k2
i g (ki, r′, r) = −δ (r′ − r) , (1.65)
and ∇′ ×∇′ × Ei = k2i Ei, we see that the left-hand side of (1.64) is
∫
Di
Ei (r′) · ∆′g (ki, r′, r) u + g (ki, r
′, r) u · [∇′ ×∇′ × Ei (r′)]
×dV (r′)
= −∫
Di
u · Ei (r′) δ (r′ − r) dV (r′) = −u · Ei(r) .
Taking into account that for r′ = r,
∇′ ×∇′ × g (ki, r′, r) u = k2
i g (ki, r′, r) u + ∇′∇′ · g (ki, r
′, r) u ,
we rewrite the right-hand side of (1.64) as∫
S
n · Ei [∇′ · g (ki, ·r) u] + n · [Ei × (∇′ × g (ki, ·r) u)
+ (∇′ × Ei) × g (ki, ·r) u]dS
=∫
S
n · Ei [∇′ · g (ki, ·r) u] + n · [Ei × (∇′ × g (ki, ·r) u)]
+1k2i
n · [(∇′ × Ei) × (∇′ ×∇′ × g (ki, ·r) u)
− (∇′ × Ei) ×∇′∇′ · g (ki, ·r) u]dS .
From Stokes theorem we have∫
S
n · ∇′ × [H i∇′ · g (ki, ·r) u]dS = 0 ,
whence, using the vector identity ∇×(αb) = ∇α×b+α∇×b and the Maxwellequations, we obtain
∫
S
n · Ei [∇′ · g (ki, ·, r) u] dS
=1k2i
∫
S
n · [(∇′ × Ei) ×∇′∇′ · g (ki, ·, r) u] dS .
Finally, using the vector identity a ·(b×c) = (a×b) ·c, the symmetry relation∇′g(ki, r
′, r) = −∇g(ki, r′, r), the Maxwell equations and the identities

1.4 Scattered Field 37
[∇′ × g (ki, r′, r) u] · [n (r′) × Ei (r′)]
= ∇ × g (ki, r′, r) [n (r′) × Ei (r′)] · u
and
[∇′ ×∇′ × g (ki, r′, r) u] · [n (r′) × H i (r′)]
= ∇ ×∇× g (ki, r′, r) [n (r′) × H i (r′)] · u ,
we arrive at
−u · Ei(r) = u ·∇×
∫
S
n (r′) × Ei (r′) g (ki, r, r′) dS(r′)
+j
k0εi∇×∇×
∫
S
n (r′) × H i (r′) g (ki, r, r′) dS(r′)
.
Since u is arbitrary, we have established the Stratton–Chu formula for r ∈ Di.If r ∈ Ds, we have
∫
Di
u · Ei (r′) δ (r′ − r) dV (r′) = 0 ,
and the proof follows in a similar manner. For radiating solutions to theMaxwell equations, we see that the proof is established if we can show that
∫
SR
n · [Es × (∇′ × g (ks, ·, r) u)
+1k2s
(∇′ × Es) × (∇′ ×∇′ × g (ks, ·, r) u)]
dS → 0 ,
as R → ∞, where SR is a spherical surface situated in the far-field region.To prove this assertion we use the Silver–Muller radiation condition and thegeneral assumption Imks ≥ 0.
Alternative representations for Stratton–Chu formulas involve the freespace dyadic Green function G instead of the fundamental solution g [228].A dyad D serves as a linear mapping from one vector to another vector,and in general, D can be introduced as the dyadic product of two vectors:D = a ⊗ b. The dot product of a dyad with a vector is another vector:D · c = (a⊗ b) · c = a(b · c) and c ·D = c · (a⊗ b) = (c ·a)b, while the crossproduct of a dyad with a vector is another dyad: D×c = (a⊗b)×c = a⊗(b×c)and c×D = c× (a⊗ b) = (c×a)⊗ b. The free space dyadic Green functionis defined as
G (k, r, r′) =(
I +1k2
∇⊗∇)
g (k, r, r′) ,

38 1 Basic Theory of Electromagnetic Scattering
where I is the identity dyad (D · I = I ·D = D). Multiplying the differentialequation (1.65) by I and using the identities
∇×∇×(Ig)
= ∇⊗∇g − I g ,
∇×∇× (∇⊗∇g) = 0 ,
gives the differential equation for the free space dyadic Green function
∇×∇× G (k, r, r′) = k2G (k, r, r′) + δ (r − r′) I . (1.66)
The Stratton–Chu formula for vector fields satisfying the Maxwell equationsin bounded domains read as
(−Ei(r)
0
)=∫
S
ei (r′) ·[∇′ × G (ki, r, r′)
]dS(r′)
+jk0µi
∫
S
hi (r′) · G (ki, r, r′) dS(r′) ,
(r ∈ Di
r ∈ Ds
)
and this integral representation follows from the second vector-dyadic Greentheorem [220]:
∫
D
[a ·(∇×∇× D
)− (∇×∇× a) · D
]dV
= −∫
S
n ·[a ×(∇× D
)+ (∇× a) × D
]dS ,
applied to a(r′) = Ei(r′) and D(r′) = G(ki, r′, r), the differential equation
for the free space dyadic Green function, and the identity a·(b×D) = (a×b)·D. For radiating solutions to the Maxwell equations, we use the asymptoticbehavior of the free space dyadic Green function in the far-field region
r
r×[∇× G (ks, r, r′)
]+ jksG (ks, r, r′) = o
(1r
), as r → ∞ ,
to show that the integral over the spherical surface vanishes at infinity.
Remark. The Stratton–Chu formulas are surface-integral representations forthe electromagnetic fields and are valid for homogeneous particles. For inho-mogeneous particles, a volume-integral representation for the electric field canbe derived. For this purpose, we consider the nonmagnetic domains Ds andDi (µs = µi = 1), rewrite the Maxwell equations as
∇× Et = jk0Ht , ∇× Ht = −jk0εtEt in Dt , t = s, i ,
and assume that the domain Di is isotropic, linear and inhomogeneous, i.e.,εi = εi(r). The Maxwell curl equation for the magnetic field H i can bewritten as

1.4 Scattered Field 39
∇× H i = −jk0εsEi − jk0εs
(εi
εs− 1)
Ei
= −jk0εsEi −jk0
k2s
(m2
r − 1)Ei ,
where mr = mr(r) is the relative refractive index and ks = k0√
εs. Definingthe total electric and magnetic fields everywhere in space by
E =
Es + Ee
Ei
in Ds ,in Di ,
and
H =
Hs + He
H i
in Ds ,in Di ,
respectively, and the forcing function J by
J = k2s
(m2
rt − 1)E ,
where
mrt =
1mr
in Ds ,in Di ,
we see that the total electric and magnetic fields satisfy the Maxwell curlequations,
∇× E = jk0H , ∇× H = −jk0εsE − jk0
J in Ds ∪ Di .
By taking the curl of the first equation we obtain an inhomogeneous differen-tial equation for total electric field
∇×∇× E − k2s E = J in Ds ∪ Di . (1.67)
Making use of the differential equation for the free space dyadic Green function(1.66) and the identity
∇×[G (ks, r, r′) · J (r′)
]=[∇× G (ks, r, r′)
]· J (r′) ,
we derive
∇×∇×[G (ks, r, r′) · J (r′)
]
−k2s G (ks, r, r′) · J (r′) = I · J (r′) δ (r − r′) .
Integrating this equation over all r′ and using the identity δ(r−r′) = δ(r′−r),gives [131]
(∇×∇× I − k2
s I)·∫
R3G (ks, r, r′) · J (r′) dV (r′) = J(r) . (1.68)

40 1 Basic Theory of Electromagnetic Scattering
Because (1.67) and (1.68) have the same right-hand side we deduce that
E(r) =∫
R3G (ks, r, r′) · J (r′) dV (r′) , r ∈ Ds ∪ Di
and, since J = 0 in Ds, we obtain
E(r) =∫
Di
G (ks, r, r′) · J (r′) dV (r′) , r ∈ Ds ∪ Di .
This vector field is the particular solution to the differential equation (1.67)that depends on the forcing function. For r ∈ Ds, the particular solutionsatisfies the Silver–Muller radiation condition and gives the scattered field.The solution to the homogeneous equation or the complementary solutionsatisfies the equation
∇×∇× Ee − k2s Ee = 0 in Ds ∪ Di .
and describes the field that would exist in the absence of the scattering object,i.e., the incident field. Thus, the complete solution to (1.67) can be written as
E(r) = Ee(r) +∫
Di
G (ks, r, r′) · J (r′) dV (r′)
= Ee(r) + k2s
∫
Di
G (ks, r, r′) ·[m2
r (r′) − 1]E (r′) dV (r′) ,
r ∈ Ds ∪ Di .
We note that for a nontrivial magnetic permeability of the particle, a volume-surface integral equation has been derived by Volakis [245], and a “pure”volume-integral equation has been given by Volakis et al. [246].
1.4.2 Far-Field Pattern and Amplitude Matrix
Application of Stratton–Chu representation theorem to the vector fields Es
and Ee in the domain Ds together with the boundary conditions es +ee = ei
and hs + he = hi, yield
Es(r) = ∇×∫
S
ei (r′) g (ks, r, r′) dS(r′)
+j
k0εs∇×∇×
∫
S
hi (r′) g (ks, r, r′) dS(r′) , r ∈ Ds ,
where Es,Hs and Ei,H i solve the transmission boundary-value problem.The above equation is known as the Huygens principle and it expresses thefield in the domain Ds in terms of the surface fields on the surface S (see, for

1.4 Scattered Field 41
example, [229]). Application of Stratton–Chu representation theorem in thedomain Di gives the (general) null-field equation or the extinction theorem:
Ee(r) + ∇×∫
S
ei (r′) g (ks, r, r′) dS(r′)
+j
k0εs∇×∇×
∫
S
hi (r′) g (ks, r, r′) dS(r′) = 0 , r ∈ Di ,
which shows that the radiation of the surface fields into Di extinguishes theincident wave [229]. In the null-field method, the extinction theorem is usedto derive a set of integral equations for the surface fields, while the Huygensprinciple is employed to compute the scattered field.
Every radiating solution Es,Hs to the Maxwell equations has the asymp-totic form
Es(r) =ejksr
r
Es∞(er) + O
(1r
), r → ∞ ,
Hs(r) =ejksr
r
Hs∞(er) + O
(1r
), r → ∞ ,
uniformly for all directions er = r/r. The vector fields Es∞ and Hs∞ definedon the unit sphere are the electric and magnetic far-field patterns, respectively,and satisfy the relations:
Hs∞ =√
εs
µser × Es∞ ,
er · Es∞ = er · Hs∞ = 0 .
Because Es∞ also depends on the incident direction ek, Es∞ is known as thescattering amplitude from the direction ek into the direction er [229]. Usingthe Huygens principle and the asymptotic expressions
∇×[
a (r′)ejks|r−r′||r − r′|
]
= jksejksr
r
e−jkser·r′
er × a (r′) + O(a
r
),
∇×∇×[
a (r′)ejks|r−r′||r − r′|
]
= k2s
ejksr
r
×
e−jkser·r′er × [a (r′) × er] + O
(a
r
),
as r → ∞, we obtain the following integral representations for the far-fieldpatterns [40]
Es∞(er) =jks
4π
∫
S
er × es(r′)
+√
µs
εser × [hs (r′) × er]
e−jkser·r′
dS (r′) , (1.69)

42 1 Basic Theory of Electromagnetic Scattering
Hs∞(er) =jks
4π
∫
S
er × hs(r′)
−√
εs
µser × [es (r′) × er]
e−jkser·r′
dS (r′) . (1.70)
The quantity σd = |Es∞|2 is called the differential scattering cross-section anddescribes the angular distribution of the scattered light. The differential scat-tering cross-section depends on the polarization state of the incident field andon the incident and scattering directions. The quantities σdp = |Es∞,θ|2 andσds = |Es∞,ϕ|2 are referred to as the differential scattering cross-sections forparallel and perpendicular polarizations, respectively. The differential scat-tering cross-section has the dimension of area, and a dimensionless quantityis the normalized differential scattering cross-section σdn = σd/πa2
c , where ac
is a characteristic dimension of the particle.To introduce the concepts of tensor scattering amplitude and amplitude
matrix it is necessary to choose an orthonormal unit system for polariza-tion description. In Sect. 1.2 we chose a global coordinate system and usedthe vertical and horizontal polarization unit vectors eα and eβ , to describethe polarization state of the incident wave (Fig. 1.9a). For the scattered wavewe can proceed analogously by considering the vertical and horizontal po-larization unit vectors eϕ and eθ. Essentially, (ek,eβ ,eα) are the sphericalunit vectors of ke, while (er,eθ,eϕ) are the spherical unit vectors of ks in
eβ
eα
ek
X
YO
Z
keβ
α
eθ
eϕ
er
X
YO
Z
ks
Θ
Ψ
er
eθ
eϕθ
ks
ϕeβ
eα
e⊥
e⎜⎜
Θ
ek
Fig. 1.9. Reference frames: (a) global coordinate system and (b) beam coordinatesystem

1.4 Scattered Field 43
the global coordinate system. A second choice is the system based on thescattering plane. In this case we consider the beam coordinate system withthe Z-axis directed along the incidence direction, and define the Stokes vectorswith respect to the scattering plane, that is, the plane through the direction ofincidence and scattering (Fig. 1.9b). For the scattered wave, the polarizationdescription is in terms of the vertical and horizontal polarization unit vectorseϕ and eθ, while for the incident wave, the polarization description is in termsof the unit vectors e⊥ = eϕ and e‖ = e⊥ × ek. The advantage of this sys-tem is that the scattering amplitude can take simple forms for particles withsymmetry, and the disadvantage is that e⊥ and e‖ depend on the scatter-ing direction. Furthermore, any change in the direction of light incidence alsochanges the orientation of the particle with respect to the reference frame.In our analysis we will use a fixed global coordinate system to specify boththe direction of propagation and the states of polarization of the incident andscattered waves and the particle orientation (see also, [169,228]).
The tensor scattering amplitude or the scattering dyad is given by [169]
Es∞(er) = A (er,ek) · Ee0 , (1.71)
and since er · Es∞ = 0, it follows that:
er · A (er,ek) = 0 . (1.72)
Because the incident wave is a transverse wave, ek ·Ee0 = 0, the dot productA(er,ek) ·ek is not defined by (1.71), and to complete the definition, we take
A (er,ek) · ek = 0 . (1.73)
Although the scattering dyad describes the scattering of a vector plane wave,it can be used to describe the scattering of any incident field, because anyregular solution to the Maxwell equations can be expressed as an integralover vector plane waves. As a consequence of (1.72) and (1.73), only fourcomponents of the scattering dyad are independent and it is convenient tointroduce the 2× 2 amplitude matrix S to describe the transformation of thetransverse components of the incident wave into the transverse componentsof the scattered wave in the far-field region. The amplitude matrix is givenby [17,169,228]
[Es∞,θ(er)Es∞,ϕ(er)
]= S (er,ek)
[Ee0,β
Ee0,α
], (1.74)
where Ee0,β and Ee0,α do not depend on the incident direction. Essentially,the amplitude matrix is a generalization of the scattering amplitudes includingpolarization effects. The amplitude matrix provides a complete description ofthe far-field patterns and it depends on the incident and scattering directionsas well on the size, optical properties and orientation of the particle. Theelements of the amplitude matrix

44 1 Basic Theory of Electromagnetic Scattering
S =[
Sθβ Sθα
Sϕβ Sϕα
]
are expressed in terms of the scattering dyad as follows:
Sθβ = eθ · A · eβ ,
Sθα = eθ · A · eα ,
Sϕβ = eϕ · A · eβ ,
Sϕα = eϕ · A · eα . (1.75)
1.4.3 Phase and Extinction Matrices
As in optics the electric and magnetics fields cannot directly be measured be-cause of their high frequency oscillations, other measurable quantities describ-ing the change of the polarization state upon scattering have to be defined.The transformation of the polarization characteristic of the incident light intothat of the scattered light is given by the phase matrix. The coherency phasematrix Zc relates the coherency vectors of the incident and scattered fields
J s (rer) =1r2
Zc (er,ek) Je ,
where the coherency vector of the incident field Je is given by (1.19) and thecoherency vector of the scattered field J s is defined as
J s (rer) =1
2r2
√εs
µs
⎡
⎢⎢⎢⎣
Es∞,θ (er) E∗s∞,θ (er)
Es∞,θ (er) E∗s∞,ϕ (er)
Es∞,ϕ (er) E∗s∞,θ (er)
Es∞,ϕ (er) E∗s∞,ϕ (er)
⎤
⎥⎥⎥⎦
.
Explicitly, the coherency phase matrix is given by
Zc =
⎡
⎢⎢⎢⎢⎣
|Sθβ |2 SθβS∗θα SθαS∗
θβ |Sθα|2
SθβS∗ϕβ SθβS∗
ϕα SθαS∗ϕβ SθαS∗
ϕα
SϕβS∗θβ SϕβS∗
θα SϕαS∗θβ SϕαS∗
θα
|Sϕβ |2 SϕβS∗ϕα SϕαS∗
ϕβ |Sϕα|2
⎤
⎥⎥⎥⎥⎦
.
The phase matrix Z describes the transformation of the Stokes vector of theincident field into that of the scattered field
Is (rer) =1r2
Z (er,ek) Ie (1.76)
and we have
Z (er,ek) = DZc (er,ek) D−1 ,

1.4 Scattered Field 45
where the transformation matrix D is given by (1.21), the Stokes vector ofthe incident field Ie is given by (1.20) and the Stokes vector of the scatteredfield Is is defined as
Is (rer) =1r2
⎡
⎢⎢⎢⎣
Is (er)Qs (er)Us (er)Vs (er)
⎤
⎥⎥⎥⎦
= DJ s (rer)
=1
2r2
√εs
µs
⎡
⎢⎢⎢⎢⎢⎣
|Es∞,θ (er)|2 + |Es∞,ϕ (er)|2
|Es∞,θ (er)|2 − |Es∞,ϕ (er)|2
−Es∞,ϕ (er) E∗s∞,θ (er) − Es∞,θ (er) E∗
s∞,ϕ (er)
j[Es∞,ϕ (er) E∗
s∞,θ (er) − Es∞,θ (er) E∗s∞,ϕ (er)
]
⎤
⎥⎥⎥⎥⎥⎦
.
Explicit formulas for the elements of the phase matrix are:
Z11 =12
(|Sθβ |2 + |Sθα|2 + |Sϕβ |2 + |Sϕα|2
),
Z12 =12
(|Sθβ |2 − |Sθα|2 + |Sϕβ |2 − |Sϕα|2
),
Z13 = −ReSθβS∗
θα + SϕαS∗ϕβ
,
Z14 = −ImSθβS∗
θα − SϕαS∗ϕβ
,
Z21 =12
(|Sθβ |2 + |Sθα|2 − |Sϕβ |2 − |Sϕα|2
),
Z22 =12
(|Sθβ |2 − |Sθα|2 − |Sϕβ |2 + |Sϕα|2
),
Z23 = −ReSθβS∗
θα − SϕαS∗ϕβ
,
Z24 = −ImSθβS∗
θα + SϕαS∗ϕβ
,
Z31 = −ReSθβS∗
ϕβ + SϕαS∗θα
,
Z32 = −ReSθβS∗
ϕβ − SϕαS∗θα
,
Z33 = ReSθβS∗
ϕα + SθαS∗ϕβ
,
Z34 = ImSθβS∗
ϕα + SϕβS∗θα
,
Z41 = −ImSϕβS∗
θβ + SϕαS∗θα
,
Z42 = −ImSϕβS∗
θβ − SϕαS∗θα
,
Z43 = ImSϕαS∗
θβ − SθαS∗ϕβ
,
Z44 = ReSϕαS∗
θβ − SθαS∗ϕβ
. (1.77)

46 1 Basic Theory of Electromagnetic Scattering
The above phase matrix is also known as the pure phase matrix, becauseits elements follow directly from the corresponding amplitude matrix thattransforms the two electric field components [100]. The phase matrix of aparticle in a fixed orientation may contain sixteen nonvanishing elements.Because only phase differences occur in the expressions of Zij , i, j = 1, 2, 3, 4,the phase matrix elements are essentially determined by no more than sevenreal numbers: the four moduli |Spq| and the three differences in phase betweenthe Spq, where p = θ, ϕ and q = β, α. Consequently, only seven phase matrixelements are independent and there are nine linear relations among the sixteenelements. These linear dependent relations show that a pure phase matrix hasa certain internal structure. Several linear and quadratic inequalities for thephase matrix elements have been reported by exploiting the internal structureof the pure phase matrix, and the most important inequalities are Z11 ≥ 0and |Zij | ≤ Z11 for i, j = 1, 2, 3, 4 [102–104]. In principle, all scalar and matrixproperties of pure phase matrices can be used for theoretical purposes or totest whether an experimentally or numerically determined matrix can be apure phase matrix.
Equation (1.76) shows that electromagnetic scattering produces light withpolarization characteristics different from those of the incident light. If theincident beam is unpolarized, Ie = [Ie, 0, 0, 0]T , the Stokes vector of thescattered field has at least one nonvanishing component other than inten-sity, Is = [Z11Ie, Z21Ie, Z31Ie, Z41Ie]T . When the incident beam is linearlypolarized, Ie = [Ie, Qe, Ue, 0]T , the scattered light may become ellipticallypolarized since Vs may be nonzero. However, if the incident beam is fully po-larized (Pe = 1), then the scattered light is also fully polarized (Ps = 1) [104].
As mentioned before, a scattering particle can change the state of polar-ization of the incident beam after it passes the particle. This phenomenon iscalled dichroism and is a consequence of the different values of attenuationrates for different polarization components of the incident light. A completedescription of the extinction process requires the introduction of the so-calledextinction matrix. In order to derive the expression of the extinction matrixwe consider the case of the forward-scattering direction, er = ek, and definethe coherency vector of the total field E = Es + Ee by
J (rek) =12
√εs
µs
⎡
⎢⎢⎢⎣
Eβ (rek) E∗β (rek)
Eβ (rek) E∗α (rek)
Eα (rek) E∗β (rek)
Eα (rek) E∗α (rek)
⎤
⎥⎥⎥⎦
.
Using the decomposition
Ep(r)E∗q (r) = Ee0,pE
∗e0,q + Ee0,pejke·rE∗
s,q(r)
+Es,p(r)E∗e0,qe
−jke·r + Es,p(r)E∗s,q(r) ,
where p and q stand for β and α, we approximate the integral of the genericterm EpE
∗q in the far-field region and over a small solid angle ∆Ω around the

1.4 Scattered Field 47
O
D i
Ds
S
keEe
Es
∆∆ Ω Sek rM
Fig. 1.10. Elementary surface ∆S in the far-field region
direction ek by∫
∆Ω
Ep(r)E∗q (r)r2 dΩ (er) ≈ Ep (rek) E∗
q (rek) ∆S ,
where ∆S = r2∆Ω (Fig. 1.10). On the other hand, using the far-field repre-sentation for the scattered field
Es,p(r) =ejksr
r
Es∞,p(er) + O
(1r
)
and the asymptotic expression of the plane wave exp(jke · r) (cf. (B.7)) weapproximate the integrals of each term composing EpE
∗q as follows:
∫
∆Ω
Ee0,pE∗e0,qr
2 dΩ (er) ≈ Ee0,pE∗e0,q∆S ,
∫
∆Ω
Ee0,pejke·rE∗s,q(r)r2 dΩ (er) ≈ −2πj
ksEe0,pE
∗s∞,q (ek) ,
∫
∆Ω
Es,p(r)E∗e0,qe
−jke·rr2 dΩ (er) ≈2πjks
Es∞,p (ek) E∗e0,q ,
∫
∆Ω
Es,p(r)E∗s,q(r)r2 dΩ (er) ≈ Es∞,p (ek) E∗
s∞,q (ek)∆S
r2.
Neglecting the term proportional to r−2, we see that
Ep (rek) E∗q (rek) ∆S ≈ Ee0,pE
∗e0,q∆S
−2πjks
[Ee0,pE
∗s∞,q (ek) − Es∞,p (ek) E∗
e0,q
]
and the above relation gives
J (rek) ∆S ≈ Je∆S − Kc (ek) Je ,

48 1 Basic Theory of Electromagnetic Scattering
where the coherency extinction matrix Kc is defined as
Kc =2πjks
⎡
⎢⎢⎣
S∗θβ − Sθβ S∗
θα −Sθα 0S∗
ϕβ S∗ϕα − Sθβ 0 −Sθα
−Sϕβ 0 S∗θβ − Sϕα S∗
θα
0 −Sϕβ S∗ϕβ S∗
ϕα − Sϕα
⎤
⎥⎥⎦ .
For the Stokes parameters we have
I (rek) ∆S ≈ Ie∆S − K (ek) Ie (1.78)
with the extinction matrix K being defined as
K (ek) = DKc (ek) D−1 .
The explicit formulas for the elements of the extinction matrix are
Kii =2π
ksIm Sθβ + Sϕα , i = 1, 2, 3, 4 ,
K12 = K21 =2π
ksIm Sθβ − Sϕα ,
K13 = K31 = −2π
ksIm Sθα + Sϕβ ,
K14 = K41 =2π
ksRe Sϕβ − Sθα ,
K23 = −K32 =2π
ksIm Sϕβ − Sθα ,
K24 = −K42 = −2π
ksRe Sθα + Sϕβ ,
K34 = −K43 =2π
ksRe Sϕα − Sθβ . (1.79)
The elements of the extinction matrix have the dimension of area and onlyseven components are independent. Equation (1.78) is an interpretation ofthe so-called optical theorem which will be discussed in the next section. Thisrelation shows that the particle changes not only the total electromagneticpower received by a detector in the forward scattering direction, but also itsstate of polarization.
1.4.4 Extinction, Scattering and Absorption Cross-Sections
Scattering and absorption of light changes the characteristics of the incidentbeam after it passes the particle. Let us assume that the particle is placed in abeam of electromagnetic radiation and a detector located in the far-field regionmeasures the radiation in the forward scattering direction (er = ek). Let W

1.4 Scattered Field 49
be the electromagnetic power received by the detector downstream from theparticle, and W0 the electromagnetic power received by the detector if the par-ticle is removed. Evidently, W0 > W and we say that the presence of theparticle has resulted in extinction of the incident beam. For a nonabsorbingmedium, the electromagnetic power removed from the incident beam W0−Wis accounted for by absorption in the particle and scattering by the particle.
We now consider extinction from a computational point of view. In order tosimplify the notations we will use the conventional expressions of the Poyntingvectors and the electromagnetic powers in terms of the transformed fieldsintroduced in Sect. 1.1 (we will omit the multiplicative factor 1/
√ε0µ0). The
time-averaged Poynting vector 〈S〉 can be written as [17]
〈S〉 =12Re E × H∗ = 〈Sinc〉 + 〈Sscat〉 + 〈Sext〉 ,
where E = Es + Ee and H = Hs + He are the total electric and magneticfields,
〈Sinc〉 =12Re Ee × H∗
e
is the Poynting vector associated with the external excitation,
〈Sscat〉 =12Re Es × H∗
s
is the Poynting vector corresponding to the scattered field and
〈Sext〉 =12Re Ee × H∗
s + Es × H∗e
is the Poynting vector caused by the interaction between the scattered andincident fields.
Taking into account the boundary conditions n×Ei = n×E and n×H i =n×H on S, we express the time-averaged power absorbed by the particle as
Wabs = −12
∫
S
n · Re Ei × H∗i dS
= −12
∫
S
n · Re E × H∗dS .
With Sc being an auxiliary surface enclosing S (Fig. 1.11), we apply the Greensecond vector theorem to the vector fields E and E∗ in the domain D boundedby S and Sc. We obtain
∫
S
n · (E × H∗ + E∗ × H) dS =∫
Sc
n · (E × H∗ + E∗ × H) dS ,
and further∫
S
n · Re E × H∗dS =∫
Sc
n · Re E × H∗dS .

50 1 Basic Theory of Electromagnetic Scattering
O
D i
D
S
ke
Ee
Es
Sc
E = Ee+Es
Fig. 1.11. Auxiliary surface Sc
The time-averaged power absorbed by the particle then becomes
Wabs = −12
∫
Sc
n · Re E × H∗dS = −∫
Sc
n · 〈S〉dS
= Winc − Wscat + Wext ,
where
Winc = −∫
Sc
n · 〈Sinc〉dS = −12
∫
Sc
n · Re Ee × H∗edS , (1.80)
Wscat =∫
Sc
n · 〈Sscat〉dS =12
∫
Sc
n · Re Es × H∗sdS , (1.81)
Wext = −∫
Sc
n · 〈Sext〉dS = −12
∫
Sc
n · Re Ee × H∗s + Es × H∗
edS .
(1.82)
The divergence theorem applied to the excitation field in the domain Dc
bounded by Sc gives∫
Dc
∇ · (Ee × H∗e) dV =
∫
Sc
n · (Ee × H∗e) dS ,
whence, using
∇ · (Ee × H∗e) = jk0
(µs |He|2 − εs |Ee|2
),
andRe ∇ · (Ee × H∗
e) = 0 ,
yieldWinc = 0 .

1.4 Scattered Field 51
Thus, Wext is the sum of the electromagnetic scattering power and the elec-tromagnetic absorption power
Wext = Wscat + Wabs .
For a plane wave incidence, the extinction and scattering cross-sections aregiven by
Cext =Wext
12
√εsµs
|Ee0|2, (1.83)
Cscat =Wscat
12
√εsµs
|Ee0|2, (1.84)
the absorption cross-section is
Cabs = Cext − Cscat ≥ 0 ,
while the single-scattering albedo is
ω =Cscat
Cext≤ 1 .
Essentially, Cscat and Cabs represent the electromagnetic powers removed fromthe incident wave as a result of scattering and absorption of the incident ra-diation, while Cext gives the total electromagnetic power removed from theincident wave by the combined effect of scattering and absorption. The op-tical cross-sections have the dimension of area and depend on the directionand polarization state of the incident wave as well on the size, optical proper-ties and orientation of the particle. The efficiencies (or efficiency factors) forextinction, scattering and absorption are defined as
Qext =Cext
G, Qscat =
Cscat
G, Qabs =
Cabs
G,
where G is the particle cross-sectional area projected onto a plane perpendicu-lar to the incident beam. In view of the definition of the normalized differentialscattering cross-section, we set G = πa2
c , where ac is the area-equivalent-circleradius. From the point of view of geometrical optics we expect that the ex-tinction efficiency of all particles would be identically equal to unity. In fact,there are many particles which can scatter and absorb more light than isgeometrically incident upon them [17].
The scattering cross-section is the integral of the differential scatter-ing cross-section over the unit sphere. To prove this assertion, we expressCscat as
Cscat =1
|Ee0|2√
µs
εs
∫
Sc
er · Re Es × H∗sdS ,

52 1 Basic Theory of Electromagnetic Scattering
where Sc is a spherical surface situated at infinity and use the far-field repre-sentation
er · (Es × H∗s ) =
1r2
√εs
µs
[|Es∞|2 + O
(1r
)], r → ∞
to obtainCscat =
1|Ee0|2
∫
Ω
|Es∞|2 dΩ . (1.85)
The scattering cross-section can be expressed in terms of the elements of thephase matrix and the Stokes parameters of the incident wave. Taking intoaccount the expressions of Ie and Is, and using (1.76) we obtain
Cscat =1Ie
∫
Ω
Is (er) dΩ (er)
=1Ie
∫
Ω
[Z11 (er,ek) Ie + Z12 (er,ek) Qe
+ Z13 (er,ek) Ue + Z14 (er,ek) Ve] dΩ (er) . (1.86)
The phase function is related to the differential scattering cross-section by therelation
p (er,ek) =4π
Cscat |Ee0|2|Es∞ (er)|2
and in view of (1.85) we see that p is dimensionless and normalized, i.e.,
14π
∫
Ω
p dΩ = 1 .
The mean direction of propagation of the scattered field is defined as
g =1
Cscat |Ee0|2∫
Ω
|Es∞ (er)|2 er dΩ (er) (1.87)
and obviously
g =1
CscatIe
∫
Ω
Is (er) er dΩ (er)
=1
CscatIe
∫
Ω
[Z11 (er,ek) Ie + Z12 (er,ek) Qe
+ Z13 (er,ek) Ue + Z14 (er,ek) Ve] er dΩ (er) .
The asymmetry parameter 〈cos Θ〉 is the dot product between the vector gand the incident direction ek [17, 169],

1.4 Scattered Field 53
〈cos Θ〉 = g · ek =1
Cscat |Ee0|2∫
Ω
|Es∞ (er)|2 er · ek dΩ (er)
=14π
∫
Ω
p (er,ek) cos Θ dΩ (er) ,
where cos Θ = er · ek, and it is apparent that the asymmetry parameter isthe average cosine of the scattering angle Θ. If the particle scatters morelight toward the forward direction (Θ = 0), 〈cos Θ〉 is positive and 〈cos Θ〉 isnegative if the scattering is directed more toward the backscattering direction(Θ = 180). If the scattering is symmetric about a scattering angle of 90,〈cos Θ〉 vanishes.
1.4.5 Optical Theorem
The expression of extinction has been derived by integrating the Poynting vec-tor over an auxiliary surface around the particle. This derivation emphasizedthe conservation of energy aspect of extinction: extinction is the combinedeffect of absorption and scattering. A second derivation emphasizes the inter-ference aspect of extinction: extinction is a result of the interference betweenthe incident and forward scattered light [17]. Applying Green’s second vectortheorem to the vector fields Es and E∗
e in the domain D bounded by S andSc, we obtain∫
S
n · (Es × H∗e + E∗
e × Hs) dS =∫
Sc
n · (Es × H∗e + E∗
e × Hs) dS
and further∫
S
n · Re Es × H∗e + E∗
e × HsdS =∫
Sc
n · Re Es × H∗e + E∗
e × HsdS .
This result together with (1.82) and the identity ReEe×H∗s = ReE∗
e×Hsgive
Wext = −12
∫
S
n · Re Es × H∗e + E∗
e × HsdS ,
whence, using the explicit expressions for Ee and He, we derive
Wext =12Re∫
S
[E∗e0 · hs (r′)
−√
εs
µs(ek × E∗
e0) · es (r′)]
e−jke·r′dS (r′)
.
In the integral representation for the electric far-field pattern (cf. (1.69)) weset er = ek, take the dot product between Es∞(ek) and E∗
e0, and obtain

54 1 Basic Theory of Electromagnetic Scattering
E∗e0 · Es∞ (ek) =
jks
4π
õs
εs
∫
S
E∗e0 · hs (r′)
−√
εs
µs(ek × E∗
e0) · es (r′)
e−jke·r′dS (r′) .
The last two relations imply that
Wext =12Re√
εs
µs
4π
jksE∗
e0 · Es∞ (ek)
and further that
Cext =4π
ks |Ee0|2Im E∗
e0 · Es∞ (ek) . (1.88)
The above relation is a representation of the optical theorem, and since theextinction cross-section is in terms of the scattering amplitude in the forwarddirection, the optical theorem is also known as the extinction theorem orthe forward scattering theorem. This fundamental relation can be used tocompute the extinction cross-section when the imaginary part of the scatteringamplitude in the forward direction is known accurately. In view of (1.88) and(1.74), and taking into account the explicit expressions of the elements of theextinction matrix we see that
Cext =1Ie
[K11 (ek) Ie + K12 (ek) Qe + K13 (ek) Ue + K14 (ek) Ve] . (1.89)
1.4.6 Reciprocity
The tensor scattering amplitude satisfies a useful symmetry property whichis referred to as reciprocity. As a consequence, reciprocity relations for theamplitude, phase and extinction matrices can be derived. Reciprocity is amanifestation of the symmetry of the scattering process with respect to aninversion of time and holds for particles in arbitrary orientations [169]. Inorder to derive this property we use the following result: if E1, H1 and E2,H2 are the total fields generated by the incident fields Ee1, He1 and Ee2,He2, respectively, we have∫
S
n · (E2 × H1 − E1 × H2) dS =∫
Sc
n · (E2 × H1 − E1 × H2) dS ,
where as before, Sc is an auxiliary surface enclosing S. Since E1 and E2 aresource free in the domain bounded by S and Sc, the above equation followsimmediately from Green second vector theorem. Further, applying Green’ssecond vector theorem to the internal fields Ei1 and Ei2 in the domain Di,and taking into account the boundary conditions n × Ei1,2 = n × E1,2 andn × H i1,2 = n × H1,2 on S, yields

1.4 Scattered Field 55
∫
S
n · (E2 × H1 − E1 × H2) dS = 0 ,
whence ∫
Sc
n · (E2 × H1 − E1 × H2) dS = 0 , (1.90)
follows. We take the surface Sc as a large sphere of outward unit normalvector er, consider the limit when the radius R becomes infinite, and writethe integrand in (1.90) as
E2 × H1 − E1 × H2
= Ee2 × He1 − Ee1 × He2 + Es2 × Hs1 − Es1 × Hs2
+Es2 × He1 − Ee1 × Hs2 + Ee2 × Hs1 − Es1 × He2 .
The Green second vector theorem applied to the incident fields Ee1 and Ee2 inany bounded domain shows that the vector plane wave terms do not contributeto the integral. Furthermore, using the far-field representation
Es2 × Hs1 − Es1 × Hs2
=e2jksr
r2
Es∞2 × Hs∞1 − Es∞1 × Hs∞2 + O
(1r
),
and taking into account the transversality of the far-field patterns
Es∞2 × Hs∞1 − Es∞1 × Hs∞2 = 0 ,
we see that the integral over the scattered wave terms also vanishes. Thus,(1.90) implies that∫
Sc
er ·(Es2 × He1 − Ee1 × Hs2) dS =∫
Sc
er ·(Es1 × He2 − Ee2 × Hs1) dS .
(1.91)For plane wave incidence,
Eeu(r) = Ee0u exp (jkeu · r) , keu = kseku , u = 1, 2 ,
the integrands in (1.91) contain the term exp(jksRek1,2 ·er). Since R is large,the stationary point method can be used to compute the integrals accordinglyto the basic result
kR
2πj
∫ 2π
0
∫ π
0
g (θ, ϕ) ejkRf(θ,ϕ)dθ dϕ =1
√fθθfϕϕ − f2
θϕ
g (θst, ϕst) ejkRf(θst,ϕst) ,
(1.92)

56 1 Basic Theory of Electromagnetic Scattering
where (θst, ϕst) is the stationary point of f , fθθ = ∂2f/∂θ2, fϕϕ = ∂2f/∂ϕ2
and fθϕ = ∂2f/∂θ∂ϕ. The integrals in (1.91) are then given by∫
Sc
er · (Es2 × He1 − Ee1 × Hs2) dS
= −4πjR
ks
√εs
µsEs∞2 (−ek1) · Ee01e−jksR ,
∫
Sc
er · (Es1 × He2 − Ee2 × Hs1) dS
= −4πjR
ks
√εs
µsEs∞1 (−ek2) · Ee02e−jksR ,
and we deduce the reciprocity relation for the far-field pattern (Fig. 1.12):
Es∞2 (−ek1) · Ee01 = Es∞1 (−ek2) · Ee02 .
The above relation gives
Ee01 · A (−ek1,ek2) · Ee02 = Ee02 · A (−ek2,ek1) · Ee01
and since a · D · b = b · DT · a, and Ee01 and Ee02 are arbitrary transversevectors, the following constraint on the tensor scattering amplitude:
A (−ek2,−ek1) = AT
(ek1,ek2)
follows. This is the reciprocity relation for the tensor scattering amplitudewhich relates scattering from the direction −ek1 into −ek2 to scattering fromek2 to ek1. Taking into account the representation of the amplitude matrixelements in terms of the tensor scattering amplitude and the fact that for
O
D i
Ske1
Ee1
Es1
Ee2
ke2
Es2(-ek1
(-ek2)
)
Fig. 1.12. Illustration of the reciprocity relation

1.5 Transition Matrix 57
e′k = −ek we have e′
β = eβ and e′α = −eα, we obtain the reciprocity
relation for the amplitude matrix:
S (−ek2,−ek1) =
[Sθβ (ek1,ek2) −Sϕβ (ek1,ek2)−Sθα (ek1,ek2) Sϕα (ek1,ek2)
]
.
If we choose ek1 = −ek2 = −ek, we obtain
Sϕβ (−ek,ek) = −Sθα (−ek,ek) ,
which is a representation of the backscattering theorem [169].From the reciprocity relation for the amplitude matrix we easily derive the
reciprocity relation for the phase and extinction matrices:
Z (−ek,−er) = QZT (er,ek) Q
and
K (−ek) = QKT (ek) Q ,
respectively, where Q = diag[1, 1,−1, 1].The reciprocity relations can be used in practice for testing the results of
theoretical computations and laboratory measurements. It should be remarkedthat reciprocity relations give also rise to symmetry relations for the dyadicGreen functions [229].
1.5 Transition Matrix
The transition matrix relates the expansion coefficients of the incident andscattered fields. The existence of the transition matrix is “postulated” by theT -Matrix Ansatz and is a consequence of the series expansions of the incidentand scattered fields and the linearity of the Maxwell equations. Historically,the transition matrix has been introduced within the null-field method for-malism (see [253, 256]), and for this reason, the null-field method has oftenbeen referred to as the T -matrix method. However, the null-field methodis only one among many methods that can be used to compute the transi-tion matrix. The transition matrix can also be derived in the framework ofthe method of moments [88], the separation of variables method [208], thediscrete dipole approximation [151] and the point matching method [181].Rother et al. [205] found a general relation between the surface Green func-tion and the transition matrix for the exterior Maxwell problem, which inprinciple, allows to compute the transition matrix with the finite-differencetechnique.
In this section we review the general properties of the transition matrixsuch as unitarity and symmetry and discuss analytical procedures for aver-aging scattering characteristics over particle orientations. These procedures

58 1 Basic Theory of Electromagnetic Scattering
relying on the rotation transformation rule for vector spherical wave func-tions are of general use because an explicit expression of the transition matrixis not required. In order to simplify our analysis we consider a vector planewave of unit amplitude
Ee(r) = epolejke·r , He(r) =√
εs
µsek × epolejke·r ,
where epol · ek = 0 and |epol| = 1.
1.5.1 Definition
Everywhere outside the (smallest) sphere circumscribing the particle it is ap-propriate to expand the scattered field in terms of radiating vector sphericalwave functions
Es(r) =∞∑
n=1
n∑
m=−n
fmnM3mn (ksr) + gmnN3
mn (ksr) (1.93)
and the incident field in terms of regular vector spherical wave functions
Ee(r) =∞∑
n=1
n∑
m=−n
amnM1mn (ksr) + bmnN1
mn (ksr) . (1.94)
Within the vector spherical wave formalism, the scattering problem is solvedby determining fmn and gmn as functions of amn and bmn. Due to the lin-earity relations of the Maxwell equations and the constitutive relations, therelation between the scattered and incident field coefficients must be linear.This relation is given by the so-called transition matrix T as follows [256]
[fmn
gmn
]= T
[amn
bmn
]=[
T 11 T 12
T 21 T 22
] [amn
bmn
]. (1.95)
Essentially, the transition matrix depends on the physical and geometricalcharacteristics of the particle and is independent on the propagation directionand polarization states of the incident and scattered field.
If the transition matrix is known, the scattering characteristics (introducedin Sect. 1.4) can be readily computed. Taking into account the asymptoticbehavior of the vector spherical wave functions we see that the far-field patterncan be expressed in terms of the elements of the transition matrix by therelation
Es∞ (er) =1ks
∑
n,m
(−j)n+1 [fmnmmn(er) + jgmnnmn(er)]
=1ks
∑
n,m
∑
n1,m1
(−j)n+1
×[(
T 11mn,m1n1
am1n1 + T 12mn,m1n1
bm1n1
)mmn(er)
+ j(T 21
mn,m1n1am1n1 + T 22
mn,m1n1bm1n1
)nmn(er)
]. (1.96)

1.5 Transition Matrix 59
To derive the expressions of the tensor scattering amplitude and amplitudematrix, we consider the scattering and incident directions er and ek, andexpress the vector spherical harmonics as
xmn(er) = xmn,θ (er) eθ + xmn,ϕ (er) eϕ ,
xmn(ek) = xmn,β (ek) eβ + xmn,α (ek) eα ,
where xmn stands for mmn and nmn. Recalling the expressions of the incidentfield coefficients for a plane wave excitation (cf. (1.26))
amn = 4jnepol · m∗mn (ek) ,
bmn = −4jn+1epol · n∗mn (ek) ,
and using the definition of the tensor scattering amplitude (cf. (1.71)), weobtain
A (er,ek) =4ks
∑
n,m
∑
n1,m1
(−j)n+1 jn1[
T 11mn,m1n1
mmn (er)
+ jT 21mn,m1n1
nmn (er)]⊗ m∗
m1n1(ek) +
[−jT 12
mn,m1n1mmn (er)
+ T 22mn,m1n1
nmn (er)]⊗ n∗
m1n1(ek)
.
In view of (1.75), the elements of the amplitude matrix are given by
Spq (er,ek) =4ks
∑
n,m
∑
n1,m1
(−j)n+1 jn1[
T 11mn,m1n1
m∗m1n1,q (ek)
− jT 12mn,m1n1
n∗m1n1,q (ek)
]mmn,p (er)
+j[T 21
mn,m1n1m∗
m1n1,q (ek) ,
− jT 22mn,m1n1
n∗m1n1,q (ek)
]nmn,p (er)
(1.97)
for p = θ, ϕ and q = β, α. For a vector plane wave linearly polarized in theβ-direction, amn = 4jnm∗
mn,β and bmn = −4jn+1n∗mn,β , and Sθβ = Es∞,θ and
Sϕβ = Es∞,ϕ. Analogously, for a vector plane wave linearly polarized in theα-direction, amn = 4jnm∗
mn,α and bmn = −4jn+1n∗mn,α, and Sθα = Es∞,θ
and Sϕα = Es∞,ϕ. In practical computer calculations, this technique, relyingon the computation of the far-field patterns for parallel and perpendicularpolarizations, can be used to determine the elements of the amplitude matrix.
For our further analysis, it is more convenient to express the above equa-tions in matrix form. Defining the vectors
s =[
fmn
gmn
], e =
[amn
bmn
]

60 1 Basic Theory of Electromagnetic Scattering
and the “augmented” vector of spherical harmonics
v (er) =[
(−j)nmmn (er)
j (−j)nnmn (er)
]
we see that
Es∞ (er) = − jks
vT (er) s = − jks
vT (er) Te = − jks
eTT Tv (er) , (1.98)
and, since e = 4epol · v∗(ek), we obtain
Spq (er,ek) = − 4jks
vTp (er) Tv∗
q (ek) = − 4jks
v†q (ek) T Tvp (er) . (1.99)
The superscript † means complex conjugate transpose, and
vp (·) =[
(−j)nmmn,p (·)
j (−j)nnmn,p (·)
],
where p = θ, ϕ for the er-dependency and p = β, α for the ek-dependency.The extinction and scattering cross-sections can be expressed in terms
of the expansion coefficients amn, bmn, fmn and gmn. Denoting by Sc thecircumscribing sphere of outward unit normal vector er and radius R, andusing the definition of the extinction cross-section (cf. (1.82) and (1.83) with|Ee0| = 1), yields
Cext = −√
µs
εs
∫
Sc
er · Re Ee × H∗s + Es × H∗
edS
= −Re
j∑
n,m
∑
n1,m1
∫
Sc
(fmna∗
m1n1+ gmnb∗m1n1
)
×[(
er × M3mn
)· N1∗
m1n1+(er × N3
mn
)· M1∗
m1n1
]
+(fmnb∗m1n1
+ gmna∗m1n1
)
×[(
er × M3mn
)· M1∗
m1n1+(er × N3
mn
)· N1∗
m1n1
]dS
.
Taking into account the orthogonality relations of the vector spherical wavefunctions on a spherical surface (cf. (B.18) and (B.19)) we obtain
Cext = −Re
jπR
ks
∞∑
n=1
n∑
m=−n
(fmna∗mn + gmnb∗mn)
×
h(1)n (ksR) [ksRjn(ksR)]′ − jn(ksR)
[ksRh(1)
n (ksR)]′
,
whence, using the Wronskian relation
h(1)n (ksR) [ksRjn(ksR)]′ − jn(ksR)
[ksRh(1)
n (ksR)]′
= − jksR
,

1.5 Transition Matrix 61
we end up with
Cext = − π
k2s
∞∑
n=1
n∑
m=−n
Re fmna∗mn + gmnb∗mn . (1.100)
For the scattering cross-section, the expansion of the far-field pattern in termsof vector spherical harmonics (cf. (1.96)) and the orthogonality relations ofthe vector spherical harmonics (cf. (B.12) and (B.13)), yields
Cscat =π
k2s
∞∑
n=1
n∑
m=−n
|fmn|2 + |gmn|2 . (1.101)
Thus, the extinction cross-section is given by the expansion coefficients of theincident and scattered field, while the scattering cross-section is determinedby the expansion coefficients of the scattered field.
1.5.2 Unitarity and Symmetry
It is of interest to investigate general constraints of the transition matrix suchas unitarity and symmetry. These properties can be established by applyingthe principle of conservation of energy to nonabsorbing particles (εi > 0 andµi > 0). We begin our analysis by defining the S matrix in terms of the Tmatrix by the relation
S = I + 2T ,
where I is the identity matrix. In the literature, the S matrix is also knownas the scattering matrix but in our analysis we avoid this term because thescattering matrix will have another significance.
First we consider the unitarity property. Application of the divergencetheorem to the total fields E = Es +Ee and H = Hs +He in the domain Dbounded by the surface S and a spherical surface Sc situated in the far-fieldregion, yields∫
D
∇·(E × H∗) dV = −∫
S
n ·(E × H∗) dS+∫
Sc
er ·(E × H∗) dS . (1.102)
We consider the real part of the above equation and since the bounded domainD is assumed to be lossless (εs > 0 and µs > 0) it follows that:
Re ∇ · (E × H∗) = Re
jk0µs |H|2 − jk0εs |E|2
= 0 in D . (1.103)
On the other hand, taking into account the boundary conditions n × Ei =n × E and n × H i = n × H on S, we have∫
S
n · (E × H∗) dS =∫
S
n · (Ei × H∗i ) dS =
∫
Di
∇ · (Ei × H∗i ) dV

62 1 Basic Theory of Electromagnetic Scattering
and since for nonabsorbing particles
Re ∇ · (Ei × H∗i ) = Re
jk0µi |H i|2 − jk0εi |Ei|2
= 0 in Di ,
we obtain ∫
S
n · Re E × H∗dS = 0 . (1.104)
Combining (1.102), (1.103) and (1.104) we deduce that∫
Sc
er · Re E × H∗dS = 0 . (1.105)
We next seek to find a series representation for the total electric field. For thispurpose, we use the decomposition
(M1
mn
N1mn
)
=12
[(M3
mn
N3mn
)
+
(M2
mn
N2mn
)]
,
where the vector spherical wave functions M2mn and N2
mn have the sameexpressions as the vector spherical wave functions M3
mn and N3mn, but with
the spherical Hankel functions of the second kind h(2)n in place of the spherical
Hankel functions of the first kind h(1)n . It should be remarked that for real
arguments x, h(2)n (x) = [h(1)
n (x)]∗. In the far-field region
M2mn(kr) =
e−jkr
kr
jn+1mmn(θ, ϕ) + O
(1r
),
N2mn(kr) =
e−jkr
kr
jnnmn(θ, ϕ) + O
(1r
),
as r → ∞, and we see that M2mn and N2
mn behave as incoming transversevector spherical waves.
The expansion of the incident field then becomes
Ee =∑
n,m
amnM1mn + bmnN1
mn
=12
∑
n,m
amnM3mn + bmnN3
mn +12
∑
n,m
amnM2mn + bmnN2
mn ,
whence
E =∑
n,m
(fmn +
12amn
)M3
mn +(
gmn +12bmn
)N3
mn
+12
∑
n,m
amnM2mn + bmnN2
mn ,

1.5 Transition Matrix 63
follows. Setting
cmn = 2fmn + amn ,
dmn = 2gmn + bmn ,
and using the T -matrix equation, yields[
cmn
dmn
]= S[
amn
bmn
]= (I + 2T )
[amn
bmn
].
The coefficients amn and bmn are determined by the incoming field. Since inthe far-field region M2
mn and N2mn become incoming vector spherical waves,
we see that the S matrix determines how an incoming vector spherical waveis scattered into the same one.
In the far-field region, the total electric field
E =12
∑
n,m
cmnM3mn + dmnN3
mn +12
∑
n,m
amnM2mn + bmnN2
mn
can be expressed as a superposition of outgoing and incoming transversespherical waves
E(r) =ejksr
r
E(1)
∞ (er) + O(
1r
)+
e−jksr
r
E(2)
∞ (er) + O(
1r
),
r → ∞ (1.106)
with
E(1)∞ (er) =
12ks
∑
n,m
(−j)n+1 [cmnmmn(er) + jdmnnmn(er)] ,
E(2)∞ (er) =
12ks
∑
n,m
jn+1 [amnmmn(er) − jbmnnmn(er)] .
For the total magnetic field we proceed analogously and obtain
H(r) =ejksr
r
H(1)
∞ (er) + O(
1r
)+
e−jksr
r
H(2)
∞ (er) + O(
1r
)
r → ∞
with
H(1)∞ =
√εs
µser × E(1)
∞ ,
H(2)∞ = −
√εs
µser × E(2)
∞ .

64 1 Basic Theory of Electromagnetic Scattering
Thus
Re er · (E × H∗) =1r2
√εs
µs
∣∣∣E(1)
∞
∣∣∣2
−∣∣∣E(2)
∞
∣∣∣2
+ O(
1r
), r → ∞
and (1.105) yields∫
Ω
(∣∣∣E(1)
∞
∣∣∣2
−∣∣∣E(2)
∞
∣∣∣2)
dΩ = 0 . (1.107)
The orthogonality relations of the vector spherical harmonics on the unitsphere give
∫
Ω
∣∣∣E(1)
∞
∣∣∣2
dΩ =π
4k2s
[a∗mn, b∗mn]S†S
[amn
bmn
],
∫
Ω
∣∣∣E(2)
∞
∣∣∣2
dΩ =π
4k2s
[a∗mn, b∗mn]
[amn
bmn
](1.108)
and since the incident field is arbitrarily, (1.107) and (1.108) implies that[217,228,256]
S†S = I . (1.109)
The above relation is the unitary condition for nonabsorbing particles. Interms of the transition matrix, this condition is
T †T = −12(T + T †) ,
or explicitly
2∑
k=1
∞∑
n′=1
n′∑
m′=−n′
T ki∗m′n′,mnT kj
m′n′,m1n1= −1
2(T ji∗
m1n1,mn + T ijmn,m1n1
). (1.110)
For absorbing particles, the integral in (1.107) is negative. Consequently, theequality in (1.110) transforms into an inequality which is equivalent to thecontractivity of the S matrix [169]. Taking the trace of (1.110), Mishchenkoet al. [169] derived an equality (inequality) between the T -matrix elements ofan axisymmetric particle provided that the z-axis of the particle coordinatesystem is directed along the axis of symmetry.
To obtain the symmetry relation we proceed as in the derivation of thereciprocity relation for the tensor scattering amplitude, i.e., we consider theelectromagnetic fields Eu, Hu generated by the incident fields Eeu, Heu, withu = 1, 2. The starting point is the integral (cf. (1.90))
∫
Sc
er · (E2 × H1 − E1 × H2) dS = 0

1.5 Transition Matrix 65
over a spherical surface Sc situated in the far-field region. Then, using theasymptotic form (cf. (1.106))
Eu(r) =ejksr
r
E(1)
u∞(er) + O(
1r
)+
e−jksr
r
E(2)
u∞(er) + O(
1r
),
r → ∞
for u = 1, 2, we obtain∫
Ω
(er × E
(1)2∞
)·(er × E
(2)1∞
)dΩ =
∫
Ω
(er × E
(1)1∞
)·(er × E
(2)2∞
)dΩ .
(1.111)Taking into account the vector spherical harmonic expansions of the far-fieldpatterns E
(1)u∞ and E
(2)u∞, u = 1, 2, and the relations er × mmn = nmn and
er × nmn = −mmn, we see that
∫
Ω
(er × E
(1)2∞
)·(er × E
(2)1∞
)dΩ =
π
4k2s
[a1,m1n1 , b1,m1n1 ]
[c2,−m1n1
d2,−m1n1
]
,
∫
Ω
(er × E
(1)1∞
)·(er × E
(2)2∞
)dΩ =
π
4k2s
[c1,mn, d1,mn]
[a2,−mn
b2,−mn
]
,
where au,mn, bu,mn are the expansion coefficients of the far-field pattern E(2)u∞,
while cu,mn, du,mn are the expansion coefficients of the far-field pattern E(1)u∞.
Consequently, (1.111) can be written in matrix form as
[a1,m1n1 , b1,m1n1 ]
[S11−m1n1,−mn S12
−m1n1,−mn
S21−m1n1,−mn S22
−m1n1,−mn
][a2,−mn
b2,−mn
]
= [a1,m1n1 , b1,m1n1 ]
[S11
mn,m1n1S21
mn,m1n1
S12mn,m1n1
S22mn,m1n1
][a2,−mn
b2,mn
]
and since the above equation holds true for any incident field, we find that
Sijmn,m1n1
= Sji−m1n1,−mn
and further thatT ij
mn,m1n1= T ji
−m1n1,−mn (1.112)
for i, j = 1, 2. This relation reflects the symmetry property of the transitionmatrix and is of basic importance in practical computer calculations. Wenote that the symmetry relation (1.112) can be obtained directly from thereciprocity relation for the tensor scattering amplitude
A (θ1, ϕ1; θ2, ϕ2) = AT
(π − θ2, π + ϕ2;π − θ1, π + ϕ1)

66 1 Basic Theory of Electromagnetic Scattering
and the identities
mmn (π − θ, π + ϕ) = (−1)nmmn (θ, ϕ) ,
nmn (π − θ, π + ϕ) = (−1)n+1nmn (θ, ϕ) ,
and
m−mn (θ, ϕ) = m∗mn (θ, ϕ) ,
n−mn (θ, ϕ) = n∗mn (θ, ϕ) .
Additional properties of the transition matrix for particles with specific sym-metries will be discussed in the next chapter. The “exact” infinite transitionmatrix satisfies the unitarity and symmetry conditions (1.110) and (1.112),respectively. However, in practical computer calculations, the truncated tran-sition matrix may not satisfies these conditions and we can test the unitarityand symmetry conditions to get a rough idea regarding the convergence to beexpected in the solution computation.
Remark. In the above analysis, the incident field is a vector plane wavewhose source is situated at infinity. Other incident fields than vector planewaves can be considered, but we shall assume that the source of the inci-dent field lies outside the circumscribing sphere Sc. In this case, the incidentfield is regular everywhere inside the circumscribing sphere, and both expan-sions (1.93) and (1.94) are valid on Sc. The T -matrix equation holds trueat finite distances from the particle (not only in the far-field region), andtherefore, the transition matrix is also known as the “nonasymptotic vector-spherical-wave transition matrix”. The properties of the transition matrix(unitarity and symmetry) can also be established by considering the energyflow through a finite sphere Sc [238]. If we now let the source of the incidentfield recede to infinity, we can let the surface Sc follow, i.e., we can considerthe case of an arbitrary large sphere and this brings us to the precedentanalysis.
1.5.3 Randomly Oriented Particles
In the following analysis we consider scattering by an ensemble of ran-domly oriented, identical particles. Random particle orientation means thatthe orientation distribution of the particles is uniform. As a consequenceof random particle orientation, the scattering medium is macroscopicallyisotropic, i.e., the scattering characteristics are independent of the incidentand scattering directions ek and er, and depend only on the angle bet-ween the unit vectors ek and er. For this type of scattering problem, itis convenient to direct the Z-axis of the global coordinate system alongthe incident direction and to choose the XZ-plane as the scattering plane(Fig. 1.13).

1.5 Transition Matrix 67
eβ
eα
ek
X
YO
Z
epolαpol
er
θ
Fig. 1.13. The Z-axis of the global coordinate system is along the incident directionand the XZ-plane is the scattering plane
General Considerations
The phase matrix of a volume element containing randomly oriented particlescan be written as
Z (er,ek) = Z (θ, ϕ = 0, β = 0, α = 0) ,
where, in general, θ and ϕ are the polar angles of the scattering directioner, and β and α are the polar angles of the incident direction ek. The phasematrix Z(θ, 0, 0, 0) is known as the scattering matrix F and relates the Stokesparameters of the incident and scattered fields defined with respect to thescattering plane. Taking into account that for an incident direction (β, α),the backscattering direction is (π − β, α + π), the complete definition of thescattering matrix is [169]
F (θ) =
Z(θ, 0, 0, 0) ,
Z (π, π, 0, 0) ,
θ ∈ [0, π),θ = π.
The scattering matrix of a volume element containing randomly oriented par-ticles has the following structure:
F (θ) =
⎡
⎢⎢⎢⎣
F11(θ) F12(θ) F13(θ) F14(θ)F12(θ) F22(θ) F23(θ) F24(θ)−F13(θ) −F23(θ) F33(θ) F34(θ)F14(θ) F24(θ) −F34(θ) F44(θ)
⎤
⎥⎥⎥⎦
. (1.113)
If each particle has a plane of symmetry or, equivalently, the particles andtheir mirror-symmetric particles are present in equal numbers, the scattering

68 1 Basic Theory of Electromagnetic Scattering
medium is called macroscopically isotropic and mirror-symmetric. Note thatrotationally symmetric particles are obviously mirror-symmetric with respectto the plane through the axis of symmetry. Because of symmetry, the scat-tering matrix of a macroscopically isotropic and mirror-symmetric scatteringmedium has the following block-diagonal structure [103,169]:
F (θ) =
⎡
⎢⎢⎢⎣
F11(θ) F12(θ) 0 0F12(θ) F22(θ) 0 0
0 0 F33(θ) F34(θ)0 0 −F34(θ) F44(θ)
⎤
⎥⎥⎥⎦
. (1.114)
The phase matrix can be related to the scattering matrix by using the rotationtransformation rule (1.22), and this procedure involves two rotations as shownin Fig. 1.14. Taking into account that the scattering matrix relates the Stokesvectors of the incident and scattered fields specified relative to the scatteringplane, I ′
s = (1/r2)F (Θ)I ′e, and using the transformation rule of the Stokes
vectors under coordinate rotations I ′e = L(σ1)Ie and Is = L(−σ2)I ′
s, weobtain
Z (θ, ϕ, β, α) = L (−σ2) F (Θ) L (σ1) ,
where
cos Θ = ek · er = cos β cos θ + sin β sin θ cos (ϕ − α) ,
eβ
ek
O
Z
β
X
er
eθ
θ Θ
e’θ
e’β
σ1
σ2
Y
Fig. 1.14. Incident and scattering directions ek and er. The scattering matrixrelates the Stokes vectors of the incident and scattered fields specified relative tothe scattering plane

1.5 Transition Matrix 69
cos σ1 = e′α · eα = − sin β cos θ − cos β sin θ cos (ϕ − α)
sinΘ,
cos σ2 = e′ϕ · eϕ =
cos β sin θ − sin β cos θ cos (ϕ − α)sin Θ
.
For an ensemble of randomly positioned particles, the waves scattered bydifferent particles are random in phase, and the Stokes parameters of theseincoherent waves add up. Therefore, the scattering matrix for the ensemble isthe sum of the scattering matrices of the individual particles:
F = N 〈F 〉 ,
where N is number of particles and 〈F 〉 denotes the ensemble-average scat-tering matrix per particle. Similar relations hold for the extinction matrixand optical cross-sections. Because the particles are identical, the ensemble-average of a scattering quantity X is the orientation-averaged quantity
〈X〉 =1
8π2
∫ 2π
0
∫ 2π
0
∫ π
0
X (αp, βp, γp) sinβp dβp dαp dγp ,
where αp, βp and γp are the particle orientation angles.In the following analysis, the T matrix formulation is used to derive
efficient analytical techniques for computing 〈X〉. These methods work muchfaster than the standard approaches based on the numerical averaging ofresults computed for many discrete orientations of the particle. We begin withthe derivation of the rotation transformation rule for the transition matrixand then compute the orientation-averaged transition matrix, optical cross-sections and extinction matrix. An analytical procedure for computing theorientation-averaged scattering matrix will conclude our analysis.
Rotation Transformation of the Transition Matrix
To derive the rotation transformation rule for the transition matrix we assumethat the orientation of the particle coordinate system Oxyz with respect tothe global coordinate system OXY Z is specified by the Euler angles αp, βp
and γp.In the particle coordinate system, the expansions of the incident and scat-
tered field are given by
Ee (r, θ, ϕ) =∞∑
n=1
n∑
m=−n
amnM1mn (ksr, θ, ϕ) + bmnN1
mn (ksr, θ, ϕ) ,
Es (r, θ, ϕ) =∞∑
n=1
n∑
m=−n
fmnM3mn (ksr, θ, ϕ) + gmnN3
mn (ksr, θ, ϕ) ,

70 1 Basic Theory of Electromagnetic Scattering
while in the global coordinate system, these expansions take the form
Ee (r, Φ, Ψ) =∞∑
n=1
n∑
m=−n
amnM1mn (ksr, Φ, Ψ) + bmnN1
mn (ksr, Φ, Ψ) ,
Es (r, Φ, Ψ) =∞∑
n=1
n∑
m=−n
fmnM3mn (r, Φ, Ψ) + gmnN3
mn (ksr, Φ, Ψ) .
Assuming the T -matrix equations s = Te and s = T e, our task is to expressthe transition matrix in the global coordinate system T in terms of the tran-sition matrix in the particle coordinate system T . Defining the “augmented”vectors of spherical wave functions in each coordinate system
w1,3 (ksr, θ, ϕ) =
[M1,3
mn (ksr, θ, ϕ)N1,3
mn (ksr, θ, ϕ)
]
and
w1,3 (ksr, Φ, Ψ) =
[M1,3
mn (ksr, Φ, Ψ)N1,3
mn (ksr, Φ, Ψ)
]
,
and using the rotation addition theorem for vector spherical wave functions,we obtain
Ee = eTw1 = eTw1 = eTR (αp, βp, γp) w1 ,
Es = sTw3 = sTw3 = sTR (−γp,−βp,−αp) w3 .
Consequently
e = RT (αp, βp, γp) e ,
s = RT (−γp,−βp,−αp) s ,
and therefore,
T (αp, βp, γp) = RT (−γp,−βp,−αp) TRT (αp, βp, γp) . (1.115)
The explicit expression of the matrix elements is [169,228,233]
T ijmn,m1n1
(αp, βp, γp) =n∑
m′=−n
n1∑
m′1=−n1
Dnm′m (−γp,−βp,−αp) T ij
m′n,m′1n1
×Dn1m1m′
1(αp, βp, γp) (1.116)
for i, j = 1, 2.Because the elements of the amplitude matrix can be expressed in terms of
the elements of the transition matrix, the above relation can be used to expressthe elements of the amplitude matrix as functions of the particle orientationangles αp, βp and γp. The properties of the Wigner D-functions can then beused to compute the integrals over the particle orientation angles.

1.5 Transition Matrix 71
Orientation-Averaged Transition Matrix
The elements of the orientation-averaged transition matrix with respect tothe global coordinate system are given by
⟨T ij
mn,m1n1
⟩=
18π2
∫ 2π
0
∫ 2π
0
∫ π
0
T ijmn,m1n1
(αp, βp, γp) sinβp dβp dαp dγp
=1
8π2
n∑
m′=−n
n1∑
m′1=−n1
T ijm′n,m′
1n1
∫ 2π
0
∫ 2π
0
∫ π
0
Dnm′m (−γp,−βp,−αp)
×Dn1m1m′
1(αp, βp, γp) sinβp dβp dαp dγp . (1.117)
Using the definition of the Wigner D-functions (cf. (B.34)), the symmetryrelation of the Wigner d-functions dn
m′m(−βp) = dnmm′(βp), and integrating
over αp and γp, yields
⟨T ij
mn,m1n1
⟩=
12
n∑
m′=−n
n1∑
m′1=−n1
∆m′m∆m1m′1δm′m′
1δmm1
×T ijm′n,m′
1n1
∫ π
0
dnmm′ (βp) dn1
m1m′1(βp) sinβp dβp ,
where ∆mm′ is given by (B.36). Taking into account the identities: ∆m′m =∆mm′ and (∆mm′)2 = 1, and using the orthogonality property of the d-functions (cf. (B.43)), we obtain [168,169]
⟨T ij
mn,m1n1
⟩= δmm1δnn1t
ijn (1.118)
with
tijn =1
2n + 1
n∑
m′=−n
T ijm′n,m′n . (1.119)
The above relation provides a simple analytical expression for the orientation-averaged transition matrix in terms of the transition matrix in the particlecoordinate system. The orientation-averaged 〈T ij〉 matrices are diagonal andtheir elements do not depend on the azimuthal indices m and m1.
Orientation-Averaged Extinction and Scattering Cross-Sections
In view of the optical theorem, the orientation-averaged extinction cross-section is (cf. (1.88) with |Ee0| = 1)
〈Cext〉 =4π
ksIm⟨
e∗pol · Es∞ (ez)
⟩.

72 1 Basic Theory of Electromagnetic Scattering
Considering the expansion of the far-field pattern in the global coordinate sys-tem (cf. (1.96)), taking the average and using the expression of the orientation-averaged transition matrix (cf. (1.118) and (1.119)), gives
⟨e∗
pol · Es∞ (ez)⟩
=1ks
∑
n,m
(−j)n+1[(
t11n amn + t12n bmn
)e∗
pol · mmn (ez)
+ j(t21n amn + t22n bmn
)e∗
pol · nmn (ez)]
,
where the summation over the index m involves the values −1 and 1. Inthe next chapter we will show that for axisymmetric particles, T ij
−mn,−mn =−T ij
mn,mn and T ij0n,0n = 0 for i = j, while for particles with a plane of sym-
metry, T ijmn,mn = 0 for i = j. Thus, for macroscopically isotropic and mirror-
symmetric media, (1.119) gives t12n = t21n = 0. Further, using the expressionsof the incident field coefficients (cf. (1.26))
amn = 4jnepol · m∗mn (ez) ,
bmn = −4jn+1epol · n∗mn (ez) ,
(1.120)
and the special values of the vector spherical harmonics in the forward direc-tion
mmn (ez) =√
2n+14 (jmex − ey) ,
nmn (ez) =√
2n+14 (ex + jmey) ,
(1.121)
we obtain [163]
〈Cext〉 = −2π
k2s
Re
∞∑
n=1
(2n + 1)(t11n + t22n
)
,
= −2π
k2s
Re
∞∑
n=1
n∑
m=−n
T 11mn,mn + T 22
mn,mn
. (1.122)
The above relation shows that the orientation-averaged extinction cross-section for macroscopically isotropic and mirror-symmetric media is deter-mined by the diagonal elements of the transition matrix in the particle coor-dinate system. The same result can be established if we consider an ensembleof randomly oriented particles (with t12n = 0 and t21n = 0) illuminated by alinearly polarized plane wave (with real polarization vector epol).
For an arbitrary excitation, the scattering cross-section can be expressedin the global coordinate system as
Cscat =π
k2s
∞∑
n=1
n∑
m=−n
∣∣∣fmn
∣∣∣2
+ |gmn|2 =π
k2s
s†s ,

1.5 Transition Matrix 73
whence, using the T -matrix equation s = T e, we obtain
〈Cscat〉 =π
k2s
e†⟨T
†(αp, βp, γp) T (αp, βp, γp)
⟩e .
Since
T (αp, βp, γp) = RT (−γp,−βp,−αp) TRT (αp, βp, γp) ,
T†(αp, βp, γp) = R∗ (αp, βp, γp) T †R∗ (−γp,−βp,−αp) ,
and in view of (B.54) and (B.55),
R∗ (−γp,−βp,−αp) =(RT (−γp,−βp,−αp)
)−1,
R∗ (αp, βp, γp) = RT (−γp,−βp,−αp) ,
we see that
T†(αp, βp, γp) T (αp, βp, γp) = RT (−γp,−βp,−αp) T †TRT (αp, βp, γp) .
The above equation is similar to (1.115), and taking the average, we obtain⟨(
T †T)ijmn,m1n1
⟩= δmm1δnn1 t
ijn ,
where
tijn =1
2n + 1
n∑
m′=−n
(T †T
)ijm′n,m′n
or explicitly,
t11n =1
2n + 1
n∑
m′=−n
∞∑
n1=1
n1∑
m1=−n1
∣∣T 11
m1n1,m′n
∣∣2 +
∣∣T 21
m1n1,m′n
∣∣2 ,
t12n =1
2n + 1
n∑
m′=−n
∞∑
n1=1
n1∑
m1=−n1
T 11∗m1n1,m′nT 12
m1n1,m′n
+T 21∗m1n1,m′nT 22
m1n1,m′n ,
t21n = t12∗n ,
t22n =1
2n + 1
n∑
m′=−n
∞∑
n1=1
n1∑
m1=−n1
∣∣T 12
m1n1,m′n
∣∣2 +
∣∣T 22
m1n1,m′n
∣∣2 .

74 1 Basic Theory of Electromagnetic Scattering
The orientation-averaged scattering cross-section then becomes
〈Cscat〉 =π
k2s
∑
n,m
t11n |amn|2 + t12n a∗mnbmn
+t21n amnb∗mn + t22n
∣∣∣bmn
∣∣∣2
, (1.123)
where as before, the summation over the index m involves the values −1 and1. For macroscopically isotropic and mirror-symmetric media, t12n = t21n = 0,and using (1.120) and (1.121), we obtain [120,162]
〈Cscat〉 =2π
k2s
∞∑
n=1
(2n + 1)(t11n + t22n
)
=2π
k2s
∞∑
n=1
n∑
m=−n
∞∑
n1=1
n1∑
m1=−n1
∣∣T 11
m1n1,mn
∣∣2 +
∣∣T 12
m1n1,mn
∣∣2
+∣∣T 21
m1n1,mn
∣∣2 +
∣∣T 22
m1n1,mn
∣∣2 . (1.124)
Thus, the orientation-averaged scattering cross-section for macroscopicallyisotropic and mirror-symmetric media is proportional to the sum of thesquares of the absolute values of the transition matrix in the particle coordi-nate system. The same result holds true for an ensemble of randomly orientedparticles illuminated by a linearly polarized plane wave.
Despite the derivation of simple analytical formulas, the above analysisshows that the orientation-averaged extinction and scattering cross-sectionsfor macroscopically isotropic and mirror-symmetric media do not depend onthe polarization state of the incident wave. The orientation-averaged extinc-tion and scattering cross-sections are invariant with respect to rotations andtranslations of the coordinate system and using these properties, Mishchenkoet al. [169] have derived several invariants of the transition matrix.
Orientation-Averaged Extinction Matrix
To compute the orientation-averaged extinction matrix it is necessary to eval-uate the orientation-averaged quantities 〈Spq(ez,ez)〉. Taking into account theexpressions of the elements of the amplitude matrix (cf. (1.97)), the equationof the orientation-averaged transition matrix (cf. (1.118) and (1.119)) andthe expressions of the vector spherical harmonics in the forward direction (cf.(1.121)), we obtain
〈Sθβ (ez,ez)〉 = 〈Sϕα (ez,ez)〉 = − j2ks
∞∑
n=1
(2n + 1)(t11n + t22n
),
〈Sθα (ez,ez)〉 = −〈Sϕβ (ez,ez)〉 = − 12ks
∞∑
n=1
(2n + 1)(t12n + t21n
).

1.5 Transition Matrix 75
Inserting these expansions into the equations specifying the elements of theextinction matrix (cf. (1.79)), we see that the nonzero matrix elements are
〈Kii〉 = −2π
k2s
Re
∞∑
n=1
(2n + 1)(t11n + t22n
)
, i = 1, 2, 3, 4 (1.125)
and
〈K14〉 = 〈K41〉 = 2πk2sRe ∞∑
n=1(2n + 1)
(t12n + t21n
)
,
〈K23〉 = −〈K32〉 = 2πk2sIm ∞∑
n=1(2n + 1)
(t12n + t21n
)
.(1.126)
In terms of the elements of the extinction matrix, the orientation-averagedextinction cross-section is (cf. (1.89))
〈Cext〉 =1Ie
[〈K11〉 Ie + 〈K14〉Ve] ,
while for macroscopically isotropic and mirror-symmetric media, the identitiest12n = t21n = 0, imply
〈K14〉 = 〈K41〉 = 〈K23〉 = 〈K32〉 = 0 .
In this specific case, the orientation-averaged extinction matrix becomes diag-onal with diagonal elements being equal to the orientation-averaged extinctioncross-section per particle, 〈K〉 = 〈Cext〉I.
Orientation-Averaged Scattering Matrix
By definition, the orientation-averaged scattering matrix is the orientation-averaged phase matrix with β = 0 and α = ϕ = 0. In the present analysiswe consider the calculation of the general orientation-averaged phase matrix〈Z(er,ek;αp, βp, γp)〉 without taking into account the specific choice of theincident and scattering directions. We give guidelines for computing the quan-tities of interest, but we do not derive a final formula for the average phasematrix.
According to the definition of the phase matrix we see that the orientation-averaged quantities 〈Spq(er,ek)S∗
p1q1(er,ek)〉, with p, p1 = θ, ϕ and q, q1 =
β, α, need to be computed. In view of (1.99), we have⟨Spq (er,ek) S∗
p1q1(er,ek)
⟩
=16k2s
⟨(v†
q1(ek) T
T(αp, βp, γp) vp1 (er)
)∗vT
p (er) T (αp, βp, γp) v∗q (ek)
⟩
=16k2s
vTq1
(ek)⟨T
†(αp, βp, γp) v∗
p1(er) vT
p (er) T (αp, βp, γp)⟩
v∗q (ek) ,

76 1 Basic Theory of Electromagnetic Scattering
where, as before, T stands for the transition matrix in the global coordinatesystem. Defining the matrices
V pp1 (er) = v∗p1
(er) vTp (er)
and
App1 (er) =⟨T
†(αp, βp, γp) V pp1(er)T (αp, βp, γp)
⟩,
we see that
⟨Spq (er,ek) S∗
p1q1(er,ek)
⟩=
16k2
s
vTq1
(ek) App1 (er) v∗q (ek) . (1.127)
Using the block-matrix decomposition
X =
[X11 X12
X21 X22
]
,
where X stands for V pp1 and App1 , we express the submatrices of App1 as
A11pp1
=⟨T
11†V 11
pp1T
11+ T
11†V 12
pp1T
21+ T
21†V 21
pp1T
11+ T
21†V 22
pp1T
21⟩
,
A12pp1
=⟨T
11†V 11
pp1T
12+ T
11†V 12
pp1T
22+ T
21†V 21
pp1T
12+ T
21†V 22
pp1T
22⟩
,
A21pp1
=⟨T
12†V 11
pp1T
11+ T
12†V 12
pp1T
21+ T
22†V 21
pp1T
11+ T
22†V 22
pp1T
21⟩
,
A22pp1
=⟨T
12†V 11
pp1T
12+ T
12†V 12
pp1T
22+ T
22†V 21
pp1T
12+ T
22†V 22
pp1T
22⟩
.
(1.128)
It is apparent that each matrix product in the above equations is of the form
W pp1 (er) =⟨T
kl†(αp, βp, γp) V uv
pp1(er) T
ij(αp, βp, γp)
⟩, (1.129)
where the permissive values of the index pairs (i, j), (k, l) and (u, v) followfrom (1.128). The elements of the W pp1 matrix are given by
(Wpp1)m1n1,m1n1(er) =
∑
n,m
∑
n,m
⟨T ij
mn,m1n1(αp, βp, γp) T kl∗
mn,m1n1(αp, βp, γp)
⟩
×(V uv
pp1
)mn,mn
(er) , (1.130)
and the rest of our analysis concerns with the computation of the term
T =⟨T ij
mn,m1n1(αp, βp, γp) T kl∗
mn,m1n1(αp, βp, γp)
⟩. (1.131)

1.5 Transition Matrix 77
It should be mentioned that for notation simplification we omit to indicatethe dependency of T on the matrix indices.
Using the rotation transformation rule for the transition matrix (cf.(1.116)), we obtain
T =1
8π2
n∑
m′=−n
n1∑
m′1=−n1
n∑
m′=−n
n1∑
m′1=−n1
[∫ 2π
0
∫ 2π
0
∫ π
0
Dnm′m (−γp,−βp,−αp)
×Dn1m1m′
1(αp, βp, γp) Dn∗
m′m(−γp,−βp,−αp)
× Dn1∗m1m′
1
(αp, βp, γp) sinβp dβp dαp dγp
]T ij
m′n,m′1n1
T kl∗m′n,m′
1n1.
Taking into account the definition of the Wigner D-functions (cf. (B.34)) andintegrating over αp and γp, yields
T =12
n∑
m′=−n
n1∑
m′1=−n1
n∑
m′=−n
n1∑
m′1=−n1
δm1−m,m1−m
δm′
1−m′,m′1−m′∆
×[∫ π
0
dnm′m (−βp) dn
m′m(−βp) dn1
m1m′1(βp) dn1
m1m′1
(βp) sinβp dβp
]
×T ijm′n,m′
1n1T kl∗
m′n,m′1n1
,
where dnmm′ are the Wigner d-functions defined in Appendix B,
∆ = ∆m′m∆m′m
∆m1m′1∆
m1m′1,
and ∆mm′ is given by (B.36). To compute the integral
I =12δm1−m,m1−m
δm′
1−m′,m′1−m′
×∫ π
0
dnm′m (−βp) dn
m′m(−βp) dn1
m1m′1(βp) dn1
m1m′1
(βp) sinβp dβp ,
we use the symmetry relations (cf. (B.39) and (B.41))
dnm′m(−βp) = dn
mm′(βp) = (−1)m+m′dn−m−m′(βp) ,
dn
m′m(−βp) = dn
mm′(βp) = (−1)m+m′dn
−m−m′(βp) ,
the expansions of the d-functions products dn1m1m′
1dn−m−m′ and dn1
m1m′1
dn
−m−m′
given by (B.47), and the orthogonality property of the d-functions (cf. (B.43)).

78 1 Basic Theory of Electromagnetic Scattering
We obtain
I = (−1)m+m′+m+m′(−1)n+n1+n+n1δ
m1−m,m1−mδm′
1−m′,m′1−m′
×umax∑
u=umin
12u + 1
Cm1−mum1n1,−mnC
m′−m′1u
−m′1n1,m′nCm1−mu
m1n1,−mnC
m′−m′1u
−m′1n1,m′n
,
where Cm+m1umn,m1n1
are the Clebsch–Gordan coefficients defined in Appendix B,and
umin = max (|n − n1| , |n − n1| , |m1 − m| , |m1 − m| , |m′ − m′1| , |m′ − m′
1|) ,
umax = min (n + n1, n + n1) .
Further, using the symmetry properties of the Clebsch–Gordan coefficients(cf. (B.48) and (B.51)) we arrive at
I = (−1)n+n1+n+n1δm1−m,m1−m
δm′
1−m′,m′1−m′
×umax∑
u=umin
2u + 1(2n1 + 1) (2n1 + 1)
Cm1n1m1−mu,mnC
−m′1n1
m′−m′1u,−m′n
×Cm1n1
m1−mu,mnC
−m′1n1
m′−m′1u,−m′n
and
T =n∑
m′=−n
n1∑
m′1=−n1
n∑
m′=−n
n1∑
m′1=−n1
∆IT ijm′n,m′
1n1T kl∗
m′n,m′1n1
. (1.132)
The orientation-averaged quantities 〈Spq(er,ek)S∗p1q1
(er,ek)〉 can be com-puted from the set of equations (1.127)–(1.132).
For an incident wave propagating along the Z-axis, the augmented vectorof spherical harmonics vq(ez) can be computed by using (1.121). Choosing theXZ-plane as the scattering plane, i.e., setting ϕ = 0, we see that the matricesV pp1(er) involve only the normalized angular functions π
|m|n (θ) and τ
|m|n (θ).
The resulting orientation-averaged scattering matrix can be computed at aset of polar angles θ and polynomial interpolation can be used to evaluate theorientation-averaged scattering matrix at any polar angle θ.
For macroscopically isotropic media, the orientation-averaged scatteringmatrix has sixteen nonzero elements (cf. (1.113)) but only ten of themare independent. For macroscopically isotropic and mirror-symmetric me-dia, the orientation-averaged scattering matrix has a block-diagonal structure(cf. (1.114)), so that only eight elements are nonzero and only six of themare independent. In this case we determine the six quantities 〈|Sθβ(θ)|2〉,

1.5 Transition Matrix 79
〈|Sθα(θ)|2〉, 〈|Sϕβ(θ)|2〉, 〈|Sϕα(θ)|2〉, 〈Sθβ(θ)S∗ϕα(θ)〉 and 〈Sθα(θ)S∗
ϕβ(θ)〉, andcompute the eight nonzero elements by using the relations
〈F11(θ)〉 =12
(⟨|Sθβ(θ)|2
⟩+⟨|Sθα(θ)|2
⟩+⟨|Sϕβ(θ)|2
⟩+⟨|Sϕα(θ)|2
⟩),
〈F12(θ)〉 =12
(⟨|Sθβ(θ)|2
⟩−⟨|Sθα(θ)|2
⟩+⟨|Sϕβ(θ)|2
⟩−⟨|Sϕα(θ)|2
⟩),
〈F21(θ)〉 = 〈F12(θ)〉 ,
〈F22(θ)〉 =12
(⟨|Sθβ(θ)|2
⟩−⟨|Sθα(θ)|2
⟩−⟨|Sϕβ(θ)|2
⟩+⟨|Sϕα(θ)|2
⟩),
〈F33(θ)〉 = Re⟨
Sθβ(θ)S∗ϕα(θ)
⟩+⟨Sθα(θ)S∗
ϕβ(θ)⟩
,
〈F34(θ)〉 = Im⟨
Sθβ(θ)S∗ϕα(θ)
⟩+⟨Sθα(θ)S∗
ϕβ(θ)⟩∗
,
〈F43(θ)〉 = −〈F34(θ)〉 ,
〈F44(θ)〉 = Re⟨
Sθβ(θ)S∗ϕα(θ)
⟩∗ −⟨Sθα(θ)S∗
ϕβ(θ)⟩
.
Other scattering characteristics as for instance the orientation-averaged scat-tering cross-section and the orientation-averaged mean direction of propaga-tion of the scattered field can be expressed in terms of the elements of theorientation-averaged scattering matrix. To derive these expressions we con-sider the scattering plane characterized by the azimuth angle ϕ as shown inFig. 1.15. In the scattering plane, the Stokes vector of the scattered wave isgiven by 〈Is(rer)〉 = (1/r2)〈F (θ)〉I ′
e, whence, using the transformation ruleof the Stokes vector under coordinate rotation I ′
e = L(ϕ)Ie, we obtain
〈Is (rer)〉 =1r2
〈F (θ)〉L (ϕ) Ie .
Further, taking into account the expression of the Stokes rotation matrix L(cf. (1.23)) we derive
〈Is (er)〉 = 〈F11 (θ)〉 Ie + [〈F12(θ)〉 cos 2ϕ + 〈F13(θ)〉 sin 2ϕ] Qe
− [〈F12(θ)〉 sin 2ϕ − 〈F13(θ)〉 cos 2ϕ] Ue + 〈F14(θ)〉Ve .
Integrating over ϕ, we find that the orientation-averaged scattering cross-section and the orientation-averaged mean direction of propagation of thescattered field are given by
〈Cscat〉 =1Ie
∫
Ω
〈Is (er)〉dΩ (er)
=2π
Ie
∫ π
0
[〈F11(θ)〉 Ie + 〈F14(θ)〉Ve] sin θ dθ

80 1 Basic Theory of Electromagnetic Scattering
O
Z
X
er
eθ
Y
eϕ
eβ
eα
e’β
e’α
θ
ϕ
ek
Fig. 1.15. Incident and scattering directions ek and er. The incident direction isalong the Z-axis and the scattering matrix relates the Stokes vectors of the incidentand scattered fields specified relative to the scattering plane characterized by theazimuth angle ϕ
and
〈g〉 =1
〈Cscat〉 Ie
∫
Ω
〈Is (er)〉 er dΩ (er)
=2π
〈Cscat〉 Ie
∫ π
0
[〈F11(θ)〉 Ie + 〈F14(θ)〉Ve] sin θ cos θ dθ
ez ,
respectively. Because the incident wave propagates along the Z-axis, thenonzero component of 〈g〉 is the orientation-averaged asymmetry parameter〈cos Θ〉. In practical computer simulations, we use the decomposition
〈Cscat〉 =1Ie
(〈Cscat〉I Ie + 〈Cscat〉V Ve) ,
and compute the quantities 〈Cscat〉I and 〈Cscat〉V by using (1.124) and therelation
〈Cscat〉V = 2π
∫ π
0
〈F14(θ)〉 sin θ dθ , (1.133)
respectively. These quantities do not depend on the polarization state of theincident wave and can be used to compute the orientation-averaged scatteringcross-section for any incident polarization. For the asymmetry parameter weproceed analogously; we use the decomposition

1.5 Transition Matrix 81
〈cos Θ〉 =〈Cscat〉I〈Cscat〉
1Ie
(〈cos Θ〉I Ie + 〈cos Θ〉V Ve) ,
and compute 〈cos Θ〉I and 〈cos Θ〉V by using the relations
〈cos Θ〉I =2π
〈Cscat〉I
∫ π
0
〈F11(θ)〉 sin θ cos θ dθ (1.134)
and
〈cos Θ〉V =2π
〈Cscat〉I
∫ π
0
〈F14(θ)〉 sin θ cos θ dθ , (1.135)
respectively. For macroscopically isotropic and mirror-symmetric media,
〈F14(θ)〉 = 0
and consequently, 〈Cscat〉 = 〈Cscat〉I and 〈cos Θ〉 = 〈cos Θ〉I.Another important scattering characteristic is the angular distribution of
the scattered field. For an ensemble of randomly oriented particles illuminatedby a vector plane wave of unit amplitude and polarization vector epol =epol,βeβ + epol,αeα, the differential scattering cross-sections in the scatteringplane ϕ are given by
〈σdp(θ)〉 =⟨|Es∞,θ(θ)|2
⟩=⟨|Sθβ(θ)|2
⟩ ∣∣E′
e0,β
∣∣2
+⟨|Sθα(θ)|2
⟩ ∣∣E′
e0,α
∣∣2
+2Re〈Sθβ(θ)S∗
θα(θ)〉E′e0,βE′∗
e0,α
(1.136)
and
〈σds(θ)〉 =⟨|Es∞,ϕ(θ)|2
⟩=⟨|Sϕβ(θ)|2
⟩ ∣∣E′
e0,β
∣∣2
+⟨|Sϕα(θ)|2
⟩ ∣∣E′
e0,α
∣∣2
+2Re⟨
Sϕβ(θ)S∗ϕα(θ)
⟩E′
e0,βE′∗e0,α
, (1.137)
where
E′e0,β = epol,β cos ϕ + epol,α sin ϕ ,
E′e0,α = −epol,β sin ϕ + epol,α cos ϕ .
It should be noted that for macroscopically isotropic and mirror-symmetricmedia,
〈Sθβ(θ)S∗θα(θ)〉 = 0 ,
⟨Sϕβ(θ)S∗
ϕα(θ)⟩
= 0 ,
and the expressions of 〈σdp(θ)〉 and 〈σds(θ)〉 simplify considerably.

82 1 Basic Theory of Electromagnetic Scattering
In practice, the inequalities
〈F11〉 ≥ |〈Fij〉| , i, j = 1, 2, 3, 4 ,
(〈F11〉 + 〈F22〉)2 − 4 〈F12〉2 ≥ (〈F33〉 + 〈F44〉)2 + 4 〈F34〉2 ,
〈F11〉 − 〈F22〉 ≥ |〈F33〉 − 〈F44〉| ,
〈F11〉 − 〈F12〉 ≥ |〈F22〉 − 〈F12〉| ,
〈F11〉 + 〈F12〉 ≥ |〈F22〉 + 〈F12〉| , (1.138)
can be used to test the numerically obtained orientation-averaged scatteringmatrix [104,169].
It should be emphasized that we do not expand the elements of theorientation-averaged scattering matrix in generalized spherical functions (orWigner d-functions) and do not exploit the advantage of performing as muchwork analytically as possible. Therefore, the above averaging procedure iscomputationally not so fast as the scattering matrix expansion method givenby Mishchenko [162]. As noted by Mishchenko et al. [169], the analyticity ofthe T -matrix formulation can be connected with the formalism of expand-ing scattering matrices in generalized spherical functions to derive an efficientprocedure that does not involve any angular variable.
Khlebtsov [120] and Fucile et al. [71] developed a similar formalism thatexploit the rotation property of the transition matrix but avoids the expansionof the scattering matrix in generalized spherical functions. Paramonov [182]and Borghese et al. [23] extended the analytical orientation-averaging proce-dure to arbitrary orientation distribution functions, while the standard aver-aging approach employing numerical integrations over the orientation angleshas been used by Wiscombe and Mugnai [263, 264] and Barber and Hill [8].A method to compute light scattering by arbitrarily oriented rotationally sym-metric particles has been given by Skaropoulos and Russchenberg [212].

2
Null-Field Method
The standard scheme for computing the transition matrix relies on the null-field method. The null-field method has been introduced by Waterman [253] asa technique for computing electromagnetic scattering by perfectly conductingparticles. Later, Bates [10] studied the same problem, followed by Waterman’sapplications of his method to electromagnetic scattering from dielectric par-ticles [254, 256] and to acoustic scattering [255]. The null-field method hassubsequently been extended to multiple scattering problems [187,188] and toelectromagnetic scattering by multilayered and composite particles [189,190].Peterson and Strom [189] derived a recurrence relation for the transition ma-trix of a multilayered particle and analyzed particles which contains severalenclosures, each with arbitrary but constant electromagnetic properties. Thenull-field treatment of a composite particle with two constituents uses a par-ticular projection of the boundary conditions on the interface and treats thetwo constituents as separate particles by exploiting the translation additiontheorem for vector spherical wave functions. However, for a large class of com-posite particles it is not natural to treat the two parts as separate particles.The geometric constraints which appear in the two-particles formalism (orig-inating in the use of translations of radiating vector spherical wave functions)are eliminated, partially or completely by Strom and Zheng [219]. The case of acomposite particle consisting of three or more constituents has been analyzedby Zheng [276], while the extension of the method to composite particles withconcavo-convex constituents has been discussed by Zheng and Strom [279].Applications of the null-field method to electromagnetic, acoustic and elasto-dynamic scattering by single and aggregated particles, to multiple scatteringin random media, and to scattering by periodical and infinite surfaces can befound in [168,169,228,234,235].
Essentially, the null-field method involves the following steps:
1. Derivation of an infinite system of integral equations for the surface fieldsby using the general null-field equation.

84 2 Null-Field Method
2. Derivation of integral representations for the scattered field coefficients interms of surface fields by using the Huygens principle.
3. Approximation of the surface fields by a complete and linearly indepen-dent system of (tangential) vector functions.
4. Truncation of the infinite system of null-field equations and of the scattered-field expansion.
5. Computation of the truncated transition matrix by matrix inversion.
These steps explicitly avoid invoking the Rayleigh hypothesis [11, 34] and re-lies on the approximation of the surface fields by a complete system of vectorfunctions (the localized vector spherical wave functions). The completenessand linear independence of various systems of vector functions on closed sur-faces, including the vector spherical wave functions, have been established byDoicu et al. [49]. For scattering problems involving inhomogeneous particlesit is necessary to establish the completeness and linear independence of thissystem of vector functions on two enclosing surfaces and this result is givenin Appendix D.
Several studies have addressed the convergence of the null-field method.Ramm [200,201] and Kristensson et al. [126] have derived sufficiency criteriafor the convergence of the null-field method, but this criteria are not satisfiedfor nonspherical surfaces. A major progress has been achieved by Dallas [44],who showed that for ellipsoidal surfaces, the far-field pattern converges in theleast-squares sense on the unit sphere.
In this chapter, we present applications of the null-field method toelectromagnetic scattering by homogeneous, isotropic, anisotropic and chi-ral particles, inhomogeneous, layered and composite particles and clusters ofparticles. Our presentation closely follows the analysis developed by Stromand his coworkers. In order to preserve the generality we assume that theparticles and the infinite, exterior medium are magnetic, but in practice wealways deal with nonmagnetic media (µs = µi = 1). In the last two sections,we treat multiple scattering in random media and scattering by a particle onor near a plane surface.
2.1 Homogeneous and Isotropic Particles
Most practical implementations of the null-field method pertain to homoge-nous and isotropic particles. T -matrix codes for axisymmetric particles havebeen developed by Wiscombe and Mugnai [263], Barber and Hill [8] andMishchenko and Travis [167]. Light scattering calculations for nonaxisym-metric particles have been reported by Barber [7], Schneider and Peden [207],Laitinen and Lumme [127], Wriedt and Comberg [269], Baran et al. [6], Have-mann and Baran [98], Kahnert et al. [111,112], and Wriedt [268]. In this sec-tion, we provide a detailed description of the null-field method in applicationto homogenous and isotropic particles.

2.1 Homogeneous and Isotropic Particles 85
OD i
Ds
S
nεs, µs
ε i, µ i
Fig. 2.1. Geometry of a homogeneous particle
2.1.1 General Formulation
The transmission boundary-value problem for homogeneous and isotropic par-ticles has been formulated in Sect. 1.4 but we mention it in order for ouranalysis to be complete. We consider an homogeneous, isotropic particle oc-cupying a domain Di with boundary S and exterior Ds (Fig. 2.1). The unitnormal vector to S directed into Ds is denoted by n. The exterior domainDs is assumed to be homogeneous, isotropic, and nonabsorbing, and if εt andµt are the relative permittivity and permeability of the domain Dt, wheret = s, i, we have εs > 0 and µs > 0. The wave number in the domain Dt iskt = k0
√εtµt, where k0 is the wave number in the free space. The transmis-
sion boundary-value problem for a homogeneous and isotropic particle has thefollowing formulation.
Given Ee,He as an entire solution to the Maxwell equations representingthe external excitation, find the vector fields Es,Hs and Ei,H i satisfying theMaxwell equations
∇× Et = jk0µtHt , ∇× Ht = −jk0εtEt , (2.1)
in Dt, t = s, i, the two transmission conditions
n × Ei − n × Es = n × Ee ,
n × H i − n × Hs = n × He , (2.2)
on S, and the Silver–Muller radiation condition
r
r×√
µsHs +√
εsEs = O(
1r
), as r → ∞ , (2.3)
uniformly for all directions r/r.The standard scheme for computing the transition matrix in the framework
of the null-field method relies on the solution of the general null-field equation

86 2 Null-Field Method
Ee(r) + ∇×∫
S
ei (r′) g (ks, r, r′) dS(r′)
+j
k0εs∇×∇×
∫
S
hi (r′) g (ks, r, r′) dS(r′) = 0 , r ∈ Di (2.4)
for the surface fields ei = n × Ei and hi = n × H i, and the calculation ofthe scattered field from Huygens principle
Es(r) = ∇×∫
S
ei (r′) g (ks, r, r′) dS(r′)
+j
k0εs∇×∇×
∫
S
hi (r′) g (ks, r, r′) dS(r′) , r ∈ Ds . (2.5)
Considering the general null-field equation (2.4), we restrict r to lie on aspherical surface enclosed in Di, expand the incident field and the dyad gIin terms of regular vector spherical wave functions (cf. (1.25), (B.21) and(B.22)), and use the orthogonality of the vector spherical wave functions onspherical surfaces to obtain
jk2s
π
∫
S
[
ei (r′) ·(
N3ν (ksr
′)M3
ν (ksr′)
)
(2.6)
+ j√
µs
εshi (r′) ·
(M3
ν (ksr′)
N3ν (ksr
′)
)]
dS (r′) = −(
aν
bν
), ν = 1, 2, . . .
For notation simplification we introduced the multi-indices ν = (m,n) andν = (−m,n), and used the convention ν = 1, 2, . . . , when n = 1, 2, . . . , andm = −n, . . . , n. The above set of integral equations will be referred to as thenull-field equations.
An approximate solution to the null-field equations can be obtained byapproximating the surface fields ei and hi by the complete set of regularvector spherical wave functions for the interior domain (or the interior waveequation)
(eN
i (r′)hN
i (r′)
)
=N∑
µ=1
cNµ
⎛
⎝n (r′) × M1
µ (kir′)
−j√
εiµi
n (r′) × N1µ (kir
′)
⎞
⎠
+dNµ
⎛
⎝n (r′) × N1
µ (kir′)
−j√
εiµi
n (r′) × M1µ (kir
′)
⎞
⎠ , (2.7)
where N is a truncation multi-index and µ = 1, 2, . . . , N , when n = 1, 2, . . .Nrank, and m = −n, . . . , n. In all applications of the null-field method weapproximate the surface fields by finite expansions, and the coefficients cN
µ anddN
µ on the right-hand side of the above equation then depend on the number of

2.1 Homogeneous and Isotropic Particles 87
terms in the expansion. The completeness of the system n×M1µ,n×N1
µµ
implies the existence of the set of expansion coefficients cNµ , dN
µ Nµ=1 and of
the integer N = N(ε), such that ‖ei − eNi ‖2,S < ε, for any ε > 0. In (2.7), eN
i
and hNi are expressed in terms of the same set of expansion coefficients and
this choice shows that ei and hi are not independent unknowns. In fact, thesurface fields ei and hi solve the general null-field equations in Di and Ds asgiven by (2.4) and
∇×∫
S
ei (r′) g (ki, r, r′) dS(r′)
+j
k0εi∇×∇×
∫
S
hi (r′) g (ki, r, r′) dS(r′) = 0 , r ∈ Ds , (2.8)
respectively, or equivalently, the infinite systems of null-field equations as givenby (2.7) and
∫
S
[
ei (r′) ·(
N1ν (kir
′)M1
ν (kir′)
)
+ j√
µi
εihi (r′) ·
(M1
ν (kir′)
N1ν (kir
′)
)]
dS (r′) = 0 , ν = 1, 2, ... , (2.9)
respectively. Note that (2.8) is the Stratton–Chu representation theorem forthe internal field in Ds, while (2.9) follows from the spherical wave expan-sion of the dyad gI outside a sphere enclosing Di. When ei and hi aretreated as independent unknowns and are approximated by sub-boundarybases, the expansion coefficients are obtained by solving (2.6) and (2.9).In (2.7), the expansion of hN
i has a physical meaning: the surface fields ei
and hi are the tangential components of the electric and magnetic fieldsEi and H i, respectively. Taking into account the orthogonality relation(cf. (B.25))
∫
S
[(n × M1
µ
)·(
M1ν
N1ν
)
+(n × N1
µ
)·(
N1ν
M1ν
)]
dS = 0 ,
we see that eNi and hN
i as given by (2.7) solve the null-field equations in Ds
and therefore, the expansion coefficients cNµ and dN
µ have to be determinedfrom the null-field equations in Di.
Inserting (2.7) into the first 2N null-field equations, yields
Q31 (ks, ki) i = −e, , (2.10)
where i = [cNµ , dN
µ ]T and e = [aν , bν ]T are vectors containing the expan-sion coefficients of the surface and incident fields, respectively. In general,

88 2 Null-Field Method
for nonmagnetic media with k1 = k0√
ε1 and k2 = k0√
ε2, the Qpq(k1, k2)matrix,
Qpq (k1, k2) =
[(Qpq)11νµ (Qpq)12νµ
(Qpq)21νµ (Qpq)22νµ
]
,
is defined as
(Qpq)11νµ =jk2
1
π
∫
S
[n (r′) × M q
µ (k2r′)]· Np
ν (k1r′)
+√
ε2
ε1
[n (r′) × N q
µ (k2r′)]· Mp
ν (k1r′)
dS (r′) , (2.11)
(Qpq)12νµ =jk2
1
π
∫
S
[n (r′) × N q
µ (k2r′)]· Np
ν (k1r′)
+√
ε2
ε1
[n (r′) × M q
µ (k2r′)]· Mp
ν (k1r′)
dS (r′) , (2.12)
(Qpq)21νµ =jk2
1
π
∫
S
[n (r′) × M q
µ (k2r′)]· Mp
ν (k1r′)
+√
ε2
ε1
[n (r′) × N q
µ (k2r′)]· Np
ν (k1r′)
dS (r′) , (2.13)
and
(Qpq)22νµ =jk2
1
π
∫
S
[n (r′) × N q
µ (k2r′)]· Mp
ν (k1r′)
+√
ε2
ε1
[n (r′) × M q
µ (k2r′)]· Np
ν (k1r′)
dS (r′) . (2.14)
Considering the scattered field representation (2.5), we replace the surfacefields by their approximations and use the vector spherical wave expansion ofthe dyad gI on a sphere enclosing Di to obtain
ENs (r) =
N∑
ν=1
fNν M3
ν (ksr) + gNν N3
ν (ksr) , (2.15)
where the expansion coefficients of the scattered field are given by(
fNν
gNν
)
=jk2
s
π
∫
S
[
eNi (r′) ·
(N1
ν (ksr′)
M1ν (ksr
′)
)
+ j√
µs
εshN
i (r′) ·(
M1ν (ksr
′)N1
ν (ksr′)
)]
dS (r′) (2.16)

2.1 Homogeneous and Isotropic Particles 89
for ν = 1, 2, . . . , N . Inserting (2.7) into (2.16) yields
s = Q11 (ks, ki) i , (2.17)
where s = [fNν , gN
ν ]T is the vector containing the expansion coefficients of thescattered field. Combining (2.10) and (2.17) we deduce that the transitionmatrix relating the scattered field coefficients to the incident field coefficients,s = Te, is given by
T = −Q11 (ks, ki)[Q31 (ks, ki)
]−1. (2.18)
In view of (2.11)–(2.14), we see that the transition matrix computed in theparticle coordinate system depends only on the physical and geometrical char-acteristics of the particle, such as particle shape and relative refractive indexand is independent of the propagation direction and polarization states of theincident and scattered fields. In contrast to the infinite transition matrix dis-cussed in Sect. 1.5, the transition matrix given by (2.18) is of finite dimension,and the often used appellation approximate or truncated transition matrix isjustified.
2.1.2 Instability
Instability of the null-field method occurs for strongly deformed particlesand large size parameters. A number of modifications to the conventionalapproach has been suggested, especially to improve the numerical stabil-ity in computations for particles with extreme geometries. These techniquesinclude formal modifications of the single spherical coordinate-based null-fieldmethod by using discrete sources [49, 109], different choices of basis func-tions and the application of the spheroidal coordinate formalism [12,89], andthe orthogonalization method [133, 256]. For large particles, the maximumconvergent size parameter can be increased by using a special form of theLU-factorization method [261] and by performing the matrix inversion usingextended-precision [166]. For strongly absorbing metallic particles, Gaussianelimination with backsubstitution gives improved convergence results [174].
Formulation with Discrete Sources
The conventional derivation of the T matrix relies on the approximation ofthe surface fields by the system of localized vector spherical wave functions.Although these wave functions appear to provide a good approximation tothe solution when the surface is not extremely aspherical, they are disadvan-tageous when this is not the case. The numerical instability of the T -matrixcalculation arises because the elements of the Q31 matrix differ by manyorders of magnitude and the inversion process is ill-conditioned. As a result,slow convergence or divergence occur. If instead of localized vector spherical

90 2 Null-Field Method
functions we use distributed sources, it is possible to extend the applicabil-ity range of the single spherical coordinate-based null-field method. Discretesources were used for the first time in the iterative version of the null-fieldmethod [108, 109, 132]. This iterative approach utilizes multipole sphericalexpansions to represent the internal fields in different overlapping regions,while the various expansions are matched in the overlapping regions to enforcethe continuity of the fields throughout the entire interior volume.
In the following analysis we summarize the basic concepts of the null-field method with distributed sources. The distributed vector spherical wavefunctions are defined as
M1,3mn(kr) = M1,3
m,|m|+l [k(r − znez)] ,
N 1,3mn(kr) = N1,3
m,|m|+l [k(r − znez)] ,
where zn∞n=1 is a dense set of points situated on the z-axis and in the interiorof S, ez is the unit vector in the direction of the z-axis, n = 1, 2, . . . ,m ∈ Z,and l = 1 if m = 0 and l = 0 if m = 0. Taking into account the Stratton–Chu representation theorem for the incident field in Di we rewrite the generalnull-field equation as
∇×∫
S
[ei (r′) − ee (r′)] g (ks, r, r′) dS(r′) (2.19)
+j
k0εs∇×∇×
∫
S
[hi (r′) − he (r′)] g (ks, r, r′) dS(r′) = 0 , r ∈ Di ,
and derive the following set of null-field equations:
jk2s
π
∫
S
[
[ei (r′) − ee (r′)] ·(
N3ν (ksr
′)M3
ν (ksr′)
)
+ j√
µs
εs[hi (r′) − he (r′)] ·
(M3
ν (ksr′)
N3ν (ksr
′)
)]
dS (r′) = 0 , ν = 1, 2, . . .
(2.20)
The formulation of the null-field method with distributed vector sphericalwave functions relies on two basic results. The first result states that if ei andhi solve the set of null-field equations (compare to (2.20))
jk2s
π
∫
S
[
[ei (r′) − ee (r′)] ·(
N 3ν (ksr
′)M3
ν (ksr′)
)
+ j√
µs
εs[hi (r′) − he (r′)] ·
(M3
ν (ksr′)
N 3ν (ksr
′)
)]
dS (r′) = 0 ,
ν = 1, 2, . . . , (2.21)

2.1 Homogeneous and Isotropic Particles 91
where ν = (m,n), ν = (−m,n) and ν = 1, 2, ..., when n = 1, 2, ..., and m ∈ Z,then ei and hi solve the general null-field equation (2.20). The second resultstates the completeness and linear independence of the system of distributedvector spherical wave functions n ×M1
µ,n × N 1µ on closed surfaces. Con-
sequently, approximating the surface fields by the finite expansions
(eN
i (r′)hN
i (r′)
)
=N∑
µ=1
cNµ
⎛
⎝n (r′) ×M1
µ (kir′)
−j√
εiµi
n (r′) ×N 1µ (kir
′)
⎞
⎠
+dNµ
⎛
⎝n (r′) ×N 1
µ (kir′)
−j√
εiµi
n (r′) ×M1µ (kir
′)
⎞
⎠ , (2.22)
inserting (2.22) into (2.21) and using the vector spherical wave expansion ofthe incident field, yields
Q31
(ks, ki) i = −Q31
(ks, ks) e .
The Q31
(ks, ki) matrix has the same structure as the Q31(ks, ki) matrix, but itcontains as rows and columns the vectors M3
ν(ksr′), N 3
ν (ksr′) and M1
µ(kir′),
N 1µ(kir
′), respectively, while Q31
(ks, ks) contains as rows and columns the vec-tors M3
ν(ksr′), N 3
ν (ksr′) and M1
µ(ksr′), N1
µ(ksr′), respectively. To compute
the scattered field we proceed as in the case of localized sources. Applicationof the Huygens principle yields the expansion of the scattered field in termsof localized vector spherical wave functions as in (2.15) and (2.16). Inserting(2.22) into (2.16) gives
s = Q11
(ks, ki) i ,
and we obtain
T = −Q11
(ks, ki)[Q
31(ks, ki)
]−1
Q31
(ks, ks) ,
where Q11
(ks, ki) contains as rows and columns the vectors M1ν(ksr
′),N1
ν(ksr′) and M1
µ(kir′), N 1
µ(kir′), respectively. Taking into account the defin-
ition of the distributed vector spherical wave functions (cf. (B.30)), we see that
the Q31
(ks, ki) matrix includes Hankel functions of low order which results ina better conditioned system of equations as compared to that obtained in thesingle spherical coordinate-based null-field method.
The use of distributed vector spherical wave functions is most effective foraxisymmetric particles because, in this case, the T matrix is diagonal withrespect to the azimuthal indices. For elongated particles, the sources are dis-tributed on the axis of rotation, while for flattened particles, the sources aredistributed in the complex plane (which is the dual of the symmetry plane).

92 2 Null-Field Method
The expressions of the distributed vector spherical wave functions with theorigins located in the complex plane are given by (B.31) and (B.32).
Various systems of vector functions can be used instead of localized anddistributed vector spherical wave functions. Formulations of the null-fieldmethod with multiple vector spherical wave functions, electric and magneticdipoles and vector Mie potentials have been given by Doicu et al. [49]. Numer-ical experiments performed by Strom and Zheng [218] demonstrated that thesystem of tangential fields constructed from the vector spherical harmonics issuitable for analyzing particles with pronounced concavities. When the sur-face fields have discontinuities in their continuity or any of their derivatives,straightforward application of the global basis functions provides poor con-vergence of the solution. Wall [247] showed that sub-boundary bases or localbasis approximations of the surface fields results in larger condition numbersof the matrix equations.
Orthogonalization Method
To ameliorate the numerical instability of the null-field method for nonabsorb-ing particles, Waterman [256,257] and Lakhtakia et al. [133,134] proposed toexploit the unitarity property of the transition matrix. To summarize this tech-nique we consider nonabsorbing particles and use the identity Q11 = ReQ31to rewrite the T -matrix equation
QT = −Re Q , (2.23)
as
QS = −Q∗ ,
where Q = Q31 and S = I + 2T . Applying the Gramm–Schmidt orthogonal-ization procedure on the row vectors of Q, we construct the unitarity matrixQ (Q
†Q = QQ
†= I) such that
Q = MQ ,
and derive
S = −Q† [
M (M∗)−1]Q
∗= −Q
†MQ
∗,
where M is an upper-triangular matrix with real diagonal elements and M =M(M∗)−1. Taking into account the unitarity condition for the S matrix (cf.(1.109)),
I = S†S = QTM
†Q · Q
†MQ
∗= Q
TM
†MQ
∗,

2.1 Homogeneous and Isotropic Particles 93
and using the relation QTQ
∗= I, we deduce that
M†M = I . (2.24)
Because M is upper-triangular with real diagonal elements, it follows thatM is unit upper-triangular (all diagonal elements are equal 1). Then, (2.24)implies that M = I, and therefore
S = −Q†Q
∗.
In terms of the transition matrix, the above equation read as
T = −Q†Re
Q
and this new sequence of truncated transition matrices might be expected toconverge more rapidly than (2.23) because the unitarity condition is satisfiedfor each truncation index.
2.1.3 Symmetries of the Transition Matrix
Symmetry properties of the transition matrix can be derived for specific par-ticle shapes. These symmetry relations can be used to test numerical codesas well as to simplify many equations of the T -matrix method and developefficient numerical procedures. In fact, the computer time for the numericalevaluation of the surface integrals (which is the most time consuming part ofthe T -matrix calculation) can be substantially reduced. The surface integralsare usually computed in spherical coordinates and for a surface defined by
r = r (θ, ϕ) ,
we have
n (r) dS (r) = σ (r) r2 sin θ dθ dϕ ,
where
σ(r) = er −1r
∂r
∂θeθ −
1r sin θ
∂r
∂ϕeϕ
is a vector parallel to the unit normal vector n. In the following analysis, wewill investigate the symmetry properties of the transition matrix for axisym-metric particles and particles with azimuthal and mirror symmetries.
1. For an axisymmetric particle, the equation of the surface does not de-pend on ϕ, and therefore ∂r/∂ϕ = 0. The vector σ has only er- and eθ-components and is independent of ϕ. The integral over the azimuthal anglecan be performed analytically and we see that the result is zero unless m = m1.

94 2 Null-Field Method
Therefore, the T matrix is diagonal with respect to the azimuthal indices mand m1, i.e.,
T ijmn,m1n1
= T ijmn,mn1
δmm1 .
Direct calculation shows that
T ijmn,mn1
= (−1)i+jT ij−mn,−mn1
(2.25)
and the symmetry relation (1.112) takes the form
T ijmn,mn1
= T ji−mn1,−mn = (−1)i+jT ji
mn1,mn .
2. We consider a particle with a principal N -fold axis of rotation symmetryand assume that the axis of symmetry coincides with the z-axis of the particlecoordinate system. In this case, r, ∂r/∂θ and ∂r/∂ϕ are periodic in ϕ withperiod 2π/N . Taking into account the definition of the Qpq matrices, we seethat the surface integrals are of the form
∫ 2π
0
f (ϕ) ej(m1−m)ϕdϕ ,
where f is a periodic function of ϕ,
f (ϕ) = f
(ϕ + k
2π
N
).
As a consequence of the rotation symmetry around the z-axis, the T matrixis invariant with respect to discrete rotations of angles αk = 2πk/N , k =1, 2, . . . , N − 1. A necessary and sufficient condition for the equation
∫ 2π
0
f (ϕ) ej(m1−m)ϕdϕ = ej(m1−m)k 2πN
∫ 2π
0
f (ϕ) ej(m1−m)ϕdϕ
to hold is |m1 − m| = lN , l = 0, 1, . . ., and we conclude that
T ijmn,m1n1
= 0
Further,∫ 2π
0
f (ϕ) ej(m1−m)ϕdϕ =N∑
k=1
ej(m1−m)(k−1) 2πN
∫ 2π/N
0
f (ϕ) ej(m1−m)ϕdϕ
= N
∫ 2π/N
0
f (ϕ) ej(m1−m)ϕdϕ ,
for |m1 − m| = lN , l = 0, 1, . . ., and we see that
T ijmn,m1n1
=
N (Trotsym)ij
mn,m1n1,
0 ,
|m1 − m| = lN, l = 0, 1, . . .
rest,
where (Trotsym)ijmn,m1n1
are the elements of the transition matrix computedby integrating ϕ over the interval [0, 2π/N ].

2.1 Homogeneous and Isotropic Particles 95
3. We consider a particle with mirror symmetry and assume that the xy-planeis the horizontal plane of reflection. The surface parameterization of a particlewith mirror symmetry has the property
r (θ, ϕ) = r (π − θ, ϕ)
and therefore
∂r
∂θ(θ, ϕ) = −∂r
∂θ(π − θ, ϕ) ,
∂r
∂ϕ(θ, ϕ) =
∂r
∂ϕ(π − θ, ϕ)
for 0 ≤ θ ≤ π/2 and 0 ≤ ϕ < 2π. Taking into account the symmetry relationsof the normalized angular functions π
|m|n and τ
|m|n (cf. (A.24) and (A.25)),
πmn (π − θ) = (−1)n−m
πmn (θ) ,
τmn (π − θ) = (−1)n−m+1
τmn (θ) ,
we find that
T ijmn,m1n1
=[1 + (−1)n+n1+|m|+|m1|+i+j
](Tmirrsym)ij
mn,m1n1,
where (Tmirrsym)ijmn,m1n1
are the elements of the transition matrix computedby integrating θ over the interval [0, π/2]. The above relation also shows that
T ijmn,m1n1
= 0 ,
if n + n1 + |m| + |m1| + i + j is an odd number.Exploitation of these symmetry relations leads to a reduction in CPU time
by three orders of magnitude from that of a standard implementation with nogeometry-specific adaptations. Additional properties of the transition matrixfor particles with specific symmetries are discussed by Kahnert et al. [111]and by Havemann and Baran [98].
2.1.4 Practical Considerations
The integrals over the particle surface are usually computed by using appro-priate quadrature formulas. For particles with piecewise smooth surfaces, thenumerical stability and accuracy of the T -matrix calculations can be improvedby using separate Gaussian quadratures on each smooth section [8, 170].
In practice, it is more convenient to interchange the order of summationin the surface field representations, i.e., the sum
Nrank∑
n=1
n∑
m=−n
(·)

96 2 Null-Field Method
is replaced by
Mrank∑
m=−Mrank
Nrank∑
n=max(1,|m|)(·) ,
where Nrank and Mrank are the maximum expansion order and the number ofazimuthal modes, respectively. Consequently, the dimension of the transitionmatrix T is
dim (T ) = 2Nmax × 2Nmax ,
where
Nmax = Nrank + Mrank (2Nrank − Mrank + 1) ,
is the truncation multi-index appearing in (2.7). The interchange of summa-tion orders is effective for axisymmetric particles because, in this case, thescattering problem can be reduced to a sequence of subproblems for eachazimuthal mode.
An important part of the numerical analysis is the convergence proce-dure that checks whether the size of the transition matrix and the number ofquadrature points for surface integral calculations are sufficiently large thatthe scattering characteristics are computed with the desired accuracy. Theconvergence tests presented in the literature are based on the analysis of thedifferential scattering cross-section [8] or the extinction and scattering cross-sections [164]. The procedure used by Barber and Hill [8] solves the scatteringproblem for consecutive values of Nrank and Mrank, and checks the convergenceof the differential scattering cross-section at a number of scattering angles. Ifthe calculated results converge within a prescribed tolerance at 80% of thescattering angles, then convergence is achieved. The procedure developed byMishchenko [164] is applicable to axisymmetric particles and finds reliableestimates of Nrank by checking the convergence of the quantities
Ce = −2π
k2s
Nrank∑
n=1
(2n + 1) ReT 11
0n,0n + T 220n,0n
and
Cs =2π
k2s
Nrank∑
n=1
(2n + 1)(∣∣T 11
0n,0n
∣∣2 +
∣∣T 22
0n,0n
∣∣2)
.
The null-field method is a general technique and is applicable for arbitrarilyshaped particles. However, for nonaxisymmetric particles, a semi-convergent

2.1 Homogeneous and Isotropic Particles 97
behavior is usually attended: the relative variations of the differential scat-tering cross-sections decrease with increasing the maximum expansion order,attain a relative constant level and afterwards increase. In this case, the mainproblem of the convergence analysis is the localization of the region of sta-bility. The extinction and scattering cross-sections can also give informationon the convergence process. Although the convergence of Cext and Cscat doesnot guarantee that the differential scattering cross-section converges, the di-vergence of Cext and Cscat implies the divergence of the T -matrix calculation.
2.1.5 Surface Integral Equation Method
The null-field method leads to a nonsingular integral equation of the firstkind. However, in the framework of the surface integral equation method, thetransmission boundary-value problem can be reduced to a pair of singularintegral equations of the second kind [97]. These equations are formulatedin terms of two surface fields which are treated as independent unknowns. Inorder to elucidate the difference between the null-field method and the surfaceintegral equation method we follow the analysis of Martin and Ola [155] andreview the basic boundary integral equations for the transmission boundary-value problem. We consider the vector potential Aa with density a
Aa(r) =∫
S
a(r′)g(k, r, r′) dS(r′) , r ∈ R3 − S
and evaluate the tangential components of the curl and double curl of thevector potential on S. For continuous tangential density, we have [39]
limh→0+
n(r) × [∇× Aa(r ± hn(r))] = ±12a(r) + (Ma)(r) , r ∈ S ,
where M is the magnetic dipole operator,
(Ma)(r) = n(r) ×[∇×
∫
S
a(r′)g(k, r, r′) dS(r′)]
, r ∈ S .
For a sufficiently smooth tangential density, we also have
limh→0+
n(r) × [∇×∇× Aa(r ± hn(r))] = (Pa)(r) , r ∈ S ,
where the principal value singular integral operator P, called the electric di-pole operator is given by
(Pa)(r) = n(r) ×[∇×∇×
∫
S
a(r′)g(k, r, r′)dS(r′)]
, r ∈ S .
Considering the null-field equations for the electric and magnetic fields inDi and Ds, and passing to the boundary along a normal direction we obtain

98 2 Null-Field Method
(12I −Ms
)ei −
jk0εs
Pshi = ee , (2.26)
(12I −Ms
)hi +
jk0µs
Psei = he , (2.27)
and(
12I + Mi
)ei +
jk0εi
Pihi = 0 , (2.28)
(12I + Mi
)hi −
jk0µi
Piei = 0 , (2.29)
respectively. These are four boundary integral equations for the unknowns ei
and hi, and we consider two linear combinations of equations, i.e.,
α1 (2.26) + α2 (2.27) + α3 (2.29) andβ1 (2.26) + β2(2.27) + β3(2.28) ,
where αi and βi, i = 1, 2, 3, are constants to be chosen. Harrington [97] de-scribes several possible choices, as shown in Table 2.1, and for all these choiceswe always have existence and unique solvability [155].
The above approach for deriving a pair of boundary integral equations isknown as the direct method. In contrast to the null-field method, the directmethod considers the null-field equations in both domains Di and Ds, andtreats the surface fields as independent unknowns. The indirect method forderiving a pair of boundary integral equations relies on the representation ofthe electromagnetic fields in terms of four surface fields. Passing to the bound-ary, using the boundary conditions on the particle surface and imposing twoconstraints on the surface fields, yields the desired pair of boundary integralequations [97]. It should be emphasized that single integral equations for thetransmission boundary-value problem have also been derived by Marx [156],Mautz [157] and Martin and Ola [155]. Another major difference to the null-field method is the discretization of the boundary integral equations, whichis achieved by using the method of moments [96]. The boundary surface isdiscretized into a set of surface elements and on each element, the surfacefields are approximated by finite expansions of basis functions. Next, a set of
Table 2.1. Choice of constants for the boundary integral equations
Formulation α1 α2 α3 β1 β2 β3
E-field 1 0 0 0 0 1
H-field 0 0 1 0 1 0
Combined field 0 1 −1 1 0 −1
Mautz–Harrington 0 1 −β 1 0 −α
Muller 0 µs µi εs 0 εi

2.1 Homogeneous and Isotropic Particles 99
testing functions are defined and the scalar product of each testing function isformed with both sides of the equation being solved. This results in a systemof equations which is referred to as the element matrix equations. The ele-ment matrices are assembled into the global matrix of the entire “structure”and the resulting system of equations is solved for the unknown expansioncoefficients.
2.1.6 Spherical Particles
An interesting feature of the null-field method is that all matrix equationsbecome considerably simpler and reduce to the corresponding equations of theLorenz–Mie theory when the particle is spherically. For a spherical particle ofradius R, the orthogonality relations of the vector spherical harmonics showthat the Qpq matrices are diagonal
(Qpq)12mn,m1n1= (Qpq)21mn,m1n1
= 0
for all values of m, n, m1 and n1, and
(Q31)11mn,m1n1
= jx
jn (mrx)[xh(1)
n (x)]′
− h(1)n (x) [mrxjn (mrx)]′
δmm1δnn1 , (2.30)
(Q31)22mn,m1n1
=jxmr
−h(1)
n (x) [mrxjn (mrx)]′
+ m2r jn (mrx)
[xh(1)
n (x)]′
δmm1δnn1 , (2.31)
(Q33)11mn,m1n1
= jx
h(1)n (mrx)
[xh(1)
n (x)]′
− h(1)n (x)
[mrxh(1)
n (mrx)]′
δmm1δnn1 , (2.32)
(Q33)22mn,m1n1
=jxmr
−h(1)
n (x)[mrxh(1)
n (mrx)]′
+ m2rh
(1)n (mrx)
[xh(1)
n (x)]′
δmm1δnn1 , (2.33)
(Q11)11mn,m1n1
= jxjn (mrx) [xjn (x)]′
− jn (x) [mrxjn (mrx)]′
δmm1δnn1 , (2.34)

100 2 Null-Field Method
(Q11)22mn,m1n1
=jxmr
−jn (x) [mrxjn (mrx)]′
+ m2r jn (mrx) [xjn (x)]′
δmm1δnn1 , (2.35)
and(Q13)11mn,m1n1
= jx
h(1)n (mrx) [xjn (x)]′
− jn (x)[mrxh(1)
n (mrx)]′
δmm1δnn1 , (2.36)
(Q13)22mn,m1n1
=jxmr
−jn (x)
[mrxh(1)
n (mrx)]′
+ m2rh
(1)n (mrx) [xjn (x)]′
δmm1δnn1 , (2.37)
where x = ksR is the size parameter and
mr =√
εi
εs
is the relative refractive index of the particle with respect to the ambientmedium. The above relations are not suitable for computing the Qpq matrices.Denoting by An and Bn the logarithmic derivatives [2, 17]
An(x) =ddx
ln [xjn (x)] =[xjn (x)]′
xjn(x),
Bn(x) =ddx
ln[xh(1)
n (x)]
=
[xh
(1)n (x)
]′
xh(1)n (x)
,
and using the recurrence relation (cf. (A.8))
[xzn (x)]′ = xzn−1(x) − nzn(x) ,
where zn stands for jn or h(1)n , we rewrite (2.30)–(2.37) as
(Q31)11mn,m1n1
= −jx2jn (mrx)[
mrAn (mrx) +n
x
]h(1)
n (x)
− h(1)n−1 (x)
δmm1δnn1 , (2.38)
(Q31)22mn,m1n1
= −jmrx2jn (mrx)
[An (mrx)
mr+
n
x
]h(1)
n (x)
− h(1)n−1 (x)
δmm1δnn1 , (2.39)

2.1 Homogeneous and Isotropic Particles 101
(Q33)11mn,m1n1
= −jx2h(1)n (mrx)
[mrBn (mrx) +
n
x
]h(1)
n (x)
− h(1)n−1 (x)
δmm1δnn1 , (2.40)
(Q33)22mn,m1n1
= −jmrx2h(1)
n (mrx)[
Bn (mrx)mr
+n
x
]h(1)
n (x)
− h(1)n−1 (x)
δmm1δnn1 , (2.41)
(Q11)11mn,m1n1
= −jx2jn (mrx)[
mrAn (mrx) +n
x
]jn (x)
− jn−1 (x) δmm1δnn1 , (2.42)
(Q11)22mn,m1n1
= −jmrx2jn (mrx)
[An (mrx)
mr+
n
x
]jn (x)
− jn−1 (x) δmm1δnn1 , (2.43)
and(Q13)11mn,m1n1
= −jx2h(1)n (mrx)
[mrBn (mrx) +
n
x
]jn (x)
− jn−1 (x) δmm1δnn1 , (2.44)
(Q13)22mn,m1n1
= −jmrx2h(1)
n (mrx)[
Bn (mrx)mr
+n
x
]jn (x)
− jn−1 (x) δmm1δnn1 . (2.45)
The functions An and Bn satisfy the recurrence relation
Ψn(x) =n + 1
x− 1
Ψn+1(x) + n+1x
,
where Ψn stands for An and Bn, and a stable scheme for computing Ψn relieson a downward recursion. Beginning with an estimate for Ψn, where n is largerthat the number of terms required for convergence, successively lower-orderlogarithmic derivatives can be generated by downward recursion. It should benoted that the downward stability of Ψn is a consequence of the downwardstability of the spherical Bessel functions jn (see Appendix A).
The transition matrix of a spherical particle is diagonal with entries
T 11mn,m1n1
= T 1nδmm1δnn1 ,
T 22mn,m1n1
= T 2nδmm1δnn1 ,

102 2 Null-Field Method
where
T 1n = −
[mrAn (mrx) + n
x
]jn (x) − jn−1 (x)
[mrAn (mrx) + n
x
]h
(1)n (x) − h
(1)n−1 (x)
(2.46)
and
T 2n = −
[An(mrx)
mr+ n
x
]jn (x) − jn−1 (x)
[An(mrx)
mr+ n
x
]h
(1)n (x) − h
(1)n−1 (x)
. (2.47)
Equations (2.46) and (2.47) relating the transition matrix to the size pa-rameter and relative refractive index are identical to the expressions of theLorenz–Mie coefficients given by Bohren and Huffman [17].
2.2 Homogeneous and Chiral Particles
The problem of scattering by isotropic, chiral spheres has been treated byBohren [16], and Bohren and Huffman [17] using rigorous electromagneticfield-theoretical calculations, while the analysis of nonspherical, isotropic, chi-ral particles has been rendered by Lakhtakia et al. [135]. To account for chi-rality, the surface fields have been approximated by left- and right-circularlypolarized fields and the same technique is employed in our analysis. The trans-mission boundary-value problem for a homogeneous and isotropic, chiral par-ticle has the following formulation.
Given Ee,He as an entire solution to the Maxwell equations representingthe external excitation, find the vector fields Es,Hs and Ei,H i satisfying theMaxwell equations
∇× Es = jk0µsHs , ∇× Hs = −jk0εsEs (2.48)
in Ds, and
∇×[
Ei
H i
]= K
[Ei
H i
](2.49)
in Di, where
K =1
1 − β2k2i
[βk2
i jk0µi
−jk0εi βk2i
]. (2.50)
In addition, the vector fields must satisfy the transmission conditions (2.2)and the Silver–Muller radiation condition (2.3).
Applications of the extinction theorem and Huygens principle yield thenull-field equations (2.6) and the integral representations for the scatteredfield coefficients (2.16). Taking into account that the electromagnetic fieldspropagating in an isotropic, chiral medium can be expressed as a superpositionof vector spherical wave functions of left- and right-handed type (cf. Sect. 1.3),we represent the approximate surface fields as

2.2 Homogeneous and Chiral Particles 103
(eN
i (r′)hN
i (r′)
)
=N∑
µ=1
cNµ
⎛
⎝n (r′) × Lµ (kLir
′)
−j√
εiµi
n (r′) × Lµ (kLir′)
⎞
⎠
+dNµ
⎛
⎝n (r′) × Rµ (kRir
′)
j√
εiµi
n (r′) × Rµ (kRir′)
⎞
⎠ ,
where Lµ and Rµ are given by (1.58) and (1.59), respectively, and
kLi =ki
1 − βki, kRi =
ki
1 + βki
are the wave numbers of the left- and right-handed type waves. The transitionmatrix of a homogeneous, chiral particle then becomes
T = −Q11chiral (ks, ki)
[Q31
chiral (ks, ki)]−1
,
where, for µi = µs, the elements of the Q31chiral matrix are given by
(Q31
chiral
)11νµ
=jk2
s
π
∫
S
[n (r′) × Lµ (kLir
′)] · N3ν (ksr
′)
+√
εi
εs[n (r′) × Lµ (kLir
′)] · M3ν (ksr
′)
dS (r′) , (2.51)
(Q31
chiral
)12νµ
=jk2
s
π
∫
S
[n (r′) × Rµ (kRir
′)] · N3ν (ksr
′)
−√
εi
εs[n (r′) × Rµ (kRir
′)] · M3ν (ksr
′)
dS (r′) , (2.52)
(Q31
chiral
)21νµ
=jk2
s
π
∫
S
[n (r′) × Lµ (kLir
′)] · M3ν (ksr
′)
+√
εi
εs[n (r′) × Lµ (kLir
′)] · N3ν (ksr
′)
dS (r′) , (2.53)
and
(Q31
chiral
)22νµ
=jk2
s
π
∫
S
[n (r′) × Rµ (kRir
′)] · M3ν (ksr
′)
−√
εi
εs[n (r′) × Rµ (kRir
′)] · N3ν (ksr
′)
dS (r′) . (2.54)
The expressions of the elements of the Q11chiral matrix are similar but with M1
ν
and N1ν in place of M3
ν and N3ν , respectively. It must be noted that in case the

104 2 Null-Field Method
particle is spherical, the transition matrix becomes diagonal, and the resultingsolution tallies exactly with that given by Bohren [16] for chiral spheres. Inaddition, if β = 0, i.e., the particle becomes a nonchiral sphere, the Lorenz–Mie series solution is obtained. Finally, simply by setting kLi = kRi = ki andβ = 0, the solution for a nonspherical, nonchiral particles is recovered. In ouranalysis, the ambient medium is nonchiral and a generalization of the presentapproach to the scattering by a chiral particle in a chiral host medium hasbeen addressed by Lakhtakia [128].
2.3 Homogeneous and Anisotropic Particles
The scattering by anisotropic particles is mostly restricted to simple shapessuch as cylinders [232] or spheres [265]. Liu et al. [143] solved the electromag-netic fields in a rotationally uniaxial medium by using the method of separa-tion of variables, while Piller and Martin [193] analyzed three-dimensionalanisotropic particles by using the generalized multipole technique. In ouranalysis we follow the treatment of Kiselev et al. [119] which solved the scatter-ing problem of radially and uniformly anisotropic spheres by using the vectorquasi-spherical wave functions for internal field representation. The trans-mission boundary-value problem for a homogeneous and uniaxial anisotropicparticle has the following formulation.
Given Ee,He as an entire solution to the Maxwell equations representingthe external excitation, find the vector fields Es,Hs and Ei,H i satisfying theMaxwell equations
∇× Es = jk0µsHs , ∇× Hs = −jk0εsEs (2.55)
in Ds, and
∇× Ei = jk0Bi , ∇× H i = −jk0Di ,
∇ · Bi = 0 , ∇ · Di = 0 (2.56)
in Di, where
Di = εiEi , Bi = µiH i , (2.57)
and
εi =
⎡
⎣εi 0 00 εi 00 0 εiz
⎤
⎦ . (2.58)
In addition, the vector fields must satisfy the transmission conditions (2.2)and the Silver–Muller radiation condition (2.3).
Considering the null-field equations (2.6) and the integral representationsfor the scattered field coefficients (2.16), and taking into account the results

2.4 Inhomogeneous Particles 105
established in Sect. 1.3 regarding the series representations of the electromag-netic fields propagating in anisotropic media, we see that the scattering prob-lem can be solved if we approximate the surface fields by finite expansions ofvector quasi-spherical wave functions Xe,h
mn and Y e,hmn (cf. (1.48)–(1.53)),
(eN
i (r′)hN
i (r′)
)
=N∑
µ=1
cNµ
⎛
⎝n (r′) × Xe
µ (r′)
−j√
εiµi
n (r′) × Xhµ (r′)
⎞
⎠
+dNµ
⎛
⎝n (r′) × Y e
µ (r′)
−j√
εiµi
n (r′) × Y hµ (r′)
⎞
⎠ .
The transition matrix of an uniaxial anisotropic particle then becomes
T = −Q11anis (ks, ki,mrz)
[Q31
anis (ks, ki,mrz)]−1
,
where mrz =√
εiz/εs, and for µi = µs, the elements of the Q31anis matrix are
given by
(Q31
anis
)11νµ
=jk2
s
π
∫
S
[(n × Xe
µ
)· N3
ν +√
εi
εs
(n × Xh
µ
)· M3
ν
]dS , (2.59)
(Q31
anis
)12νµ
=jk2
s
π
∫
S
[(n × Y e
µ
)· N3
ν +√
εi
εs
(n × Y h
µ
)· M3
ν
]dS , (2.60)
(Q31
anis
)21νµ
=jk2
s
π
∫
S
[(n × Xe
µ
)· M3
ν +√
εi
εs
(n × Xh
µ
)· N3
ν
]dS , (2.61)
and
(Q31
anis
)22νµ
=jk2
s
π
∫
S
[(n × Y e
µ
)· M3
ν +√
εi
εs
(n × Y h
µ
)· N3
ν
]dS . (2.62)
The expressions of the elements of the Q11anis matrix are similar but with M1
ν
and N1ν in place of M3
ν and N3ν , respectively. Using the properties of the
vector quasi-spherical wave functions (cf. (1.47)) it is simple to show that forεiz = εi, the present approach leads to the T -matrix solution of an isotropicparticle.
2.4 Inhomogeneous Particles
In this section, we consider electromagnetic scattering by an arbitrarilyshaped, inhomogeneous particle with an irregular inclusion. Our treatmentfollows the analysis of Peterson and Strom [189] for multilayered particlesand is similar to the approach used by Videen et al. [243] for a sphere with anirregular inclusion. Note that an alternative derivation using the Schelkunoff’sequivalence principle has been given by Wang and Barber [248].

106 2 Null-Field Method
2.4.1 Formulation with Addition Theorem
In the present analysis we will derive the expression of the transition matrixby using the translation properties of the vector spherical wave functions. Thecompleteness property of the vector spherical wave functions on two enclosingsurfaces, which is essential in our analysis, is established in Appendix D.
The scattering problem is depicted in Fig. 2.2. The surface S1 is definedwith respect to a Cartesian coordinate system O1x1y1z1, while the surfaceS2 is defined with respect to a Cartesian coordinate system O2x2y2z2. Byassumption, the coordinate system O2x2y2z2 is obtained by translating thecoordinate system O1x1y1z1 through r12 and by rotating the translated co-ordinate system through the Euler angles α, β and γ. The boundary-valueproblem for the inhomogeneous particle depicted in Fig. 2.2 has the followingformulation.
Given the external excitation Ee,He as an entire solution to the Maxwellequations, find the scattered field Es, Hs and the internal fields Ei,1, H i,1andEi,2, H i,2 satisfying the Maxwell equations
∇× Es = jk0µsHs , ∇× Hs = −jk0εsEs in Ds , (2.63)
∇× Ei,1 = jk0µi,1H i,1 , ∇× H i,1 = −jk0εi,1Ei,1 in Di,1 , (2.64)
and
∇× Ei,2 = jk0µi,2H i,2 , ∇× H i,2 = −jk0εi,2Ei,2 in Di,2 , (2.65)
the boundary conditions
n1 × Ei,1 − n1 × Es = n1 × Ee ,
n1 × H i,1 − n1 × Hs = n1 × He , (2.66)
O1
D i,1
Ds
S1
n1
O2
M1
M 2
P r199
r299r19
r29
r1
r2
S2D i,2
r12
n2
Fig. 2.2. Geometry of an inhomogeneous particle

2.4 Inhomogeneous Particles 107
on S1 and
n2 × Ei,1 = n2 × Ei,2 ,
n2 × H i,1 = n2 × H i,2 , (2.67)
onS2, and the Silver–Muller radiation condition for the scattered field (2.3).The Stratton–Chu representation theorem for the scattered field Es in Di,
where Di = Di,1 ∪ Di,2 ∪ S2 = Di,1 ∪ Di,2 = R3 − Ds, together with theboundary conditions (2.66), yield the general null-field equation
Ee(r1) + ∇1 ×∫
S1
ei,1 (r′1) g (ks, r1, r
′1) dS (r′
1) (2.68)
+j
k0εs∇1 ×∇1 ×
∫
S1
hi,1 (r′1) g (ks, r1, r
′1) dS (r′
1) = 0 , r1 ∈ Di ,
while the Stratton–Chu representation theorem for the internal field Ei,1 inDs and Di,2 together with the boundary conditions (2.67), give the generalnull-field equation
−∇1 ×∫
S1
ei,1 (r′1) g (ki,1, r1, r
′1) dS (r′
1)
− jk0εi,1
∇1 ×∇1 ×∫
S1
hi,1 (r′1) g (ki,1, r1, r
′1) dS (r′
1)
+∇1 ×∫
S2
ei,2 (r′′1) g (ki,1, r1, r
′′1) dS (r′′
1) (2.69)
+j
k0εi,2∇1 ×∇1 ×
∫
S2
hi,2 (r′′1) g (ki,1, r1, r
′′1) dS (r′′
1) = 0 , r1 ∈ Ds ∪ Di,2 .
In (2.68) and (2.69), the surface fields are the tangential components of theelectromagnetic fields in Di,1 and Di,2
ei,1 = n1 × Ei,1 , hi,1 = n1 × H i,1 on S1
and
ei,2 = n2 × Ei,2, hi,2 = n2 × H i,2 on S2 ,
respectively.Considering the general null-field equation (2.68), we use the vector spher-
ical wave expansions of the incident field and of the dyad gI on a sphereenclosed in Di, to obtain
jk2s
π
∫
S1
[
ei,1 (r′1) ·(
N3ν (ksr
′1)
M3ν (ksr
′1)
)
(2.70)
+ j√
µs
εshi,1 (r′
1) ·(
M3ν (ksr
′1)
N3ν (ksr
′1)
)]
dS (r′1) = −
(aν
bν
)
, ν = 1, 2, . . .

108 2 Null-Field Method
For the general null-field equation (2.69) in Ds, we proceed analogously butrestrict r1 to lie on a sphere enclosing Di. We then have
−jk2
i,1
π
∫
S1
[
ei,1 (r′1) ·(
N1ν(ki,1r
′1)
M1ν(ki,1r
′1)
)
+ j√
µi,1
εi,1hi,1 (r′
1) ·(
M1ν(ki,1r
′1)
N1ν(ki,1r
′1)
)]
dS (r′1)
+jk2
i,1
π
∫
S2
[
ei,2 (r′′2) ·(
N1ν (ki,1r
′′1)
M1ν(ki,1r
′′1)
)
(2.71)
+ j√
µi,1
εi,1hi,2 (r′′
2) ·(
M1ν(ki,1r
′′1)
N1ν(ki,1r
′′1)
)]
dS (r′′2) = 0 , ν = 1, 2, . . . ,
where the identities ei,2(r′′2) = ei,2(r′′
1) and hi,2(r′′2) = hi,2(r′′
1) have beenused. Finally, for the general null-field equation (2.69) in Di,2, we pass fromthe origin O1 to the origin O2 by taking into account that the gradient isinvariant to a translation of the coordinate system, use the relations
g (ki,1, r1, r′1) = g (ki,1, r2, r
′2) ,
g (ki,1, r1, r′′1) = g (ki,1, r2, r
′′2) ,
and restrict r2 to lie on a sphere enclosed in Di,2. We obtain
−jk2
i,1
π
∫
S1
[
ei,1 (r′1) ·(
N3ν(ki,1r
′2)
M3ν(ki,1r
′2)
)
+ j√
µi,1
εi,1hi,1 (r′
1) ·(
M3ν(ki,1r
′2)
N3ν(ki,1r
′2)
)]
dS (r′1)
+jk2
i,1
π
∫
S2
[
ei,2 (r′′2) ·(
N3ν(ki,1r
′′2)
M3ν(ki,1r
′′2)
)
(2.72)
+ j√
µi,1
εi,1hi,2 (r′′
2) ·(
M3ν(ki,1r
′′2)
N3ν(ki,1r
′′2)
)]
dS (r′′2) = 0 , ν = 1, 2, . . . ,
where, as before, the identities ei,1(r′1) = ei,1(r′
2) and hi,1(r′1) = hi,1(r′
2)have been employed. The set of integral equations (2.70)–(2.72) represent thenull-field equations for the scattering problem under examination.
The surface fields ei,1 and hi,1 are the tangential components of the elec-tric and magnetic fields in the domain Di,1 bounded by the closed surfaces S1
and S2. Taking into account the completeness property of the system of reg-ular and radiating vector spherical wave functions on two enclosing surfaces

2.4 Inhomogeneous Particles 109
(Appendix D), we approximate the surface fields ei,1 and hi,1 by the finiteexpansions
(eN
i,1(r′1)
hNi,1(r
′1)
)
=N∑
µ=1
cN1,µ
⎛
⎝n1(r′
1) × M1µ(ki,1r
′1)
−j√
εi,1µi,1
n1(r′1) × N1
µ(ki,1r′1)
⎞
⎠
+dN1,µ
⎛
⎝n1(r′
1) × N1µ(ki,1r
′1)
−j√
εi,1µi,1
n1(r′1) × M1
µ(ki,1r′1)
⎞
⎠
+cN1,µ
⎛
⎝n1(r′
1) × M3µ(ki,1r
′1)
−j√
εi,1µi,1
n1(r′1) × N3
µ(ki,1r′1)
⎞
⎠
+dN1,µ
⎛
⎝n1(r′
1) × N3µ(ki,1r
′1)
−j√
εi,1µi,1
n1(r′1) × M3
µ(ki,1r′1)
⎞
⎠ . (2.73)
The surface fields ei,2 and hi,2 are the tangential components of the electricand magnetic fields in the domain Di,2 and the surface fields approximationscan be expressed as linear combinations of regular vector spherical wave func-tions:
(eN
i,2(r′′2)
hNi,2(r
′′2)
)
=N∑
µ=1
cN2,µ
⎛
⎝n2(r′′
2) × M1µ(ki,2r
′′2)
−j√
εi,2µi,2
n2(r′′2) × N1
µ(ki,2r′′2)
⎞
⎠
+dN2,µ
⎛
⎝n2(r′′
2) × N1µ(ki,2r
′′2)
−j√
εi,2µi,2
n2(r′′2) × M1
µ(ki,2r′′2)
⎞
⎠ . (2.74)
To express the resulting system of equations in matrix form we introduce theQpq
t (k1, k2) matrix as the Qpq(k1, k2) matrix of the surface St. The elementsof the Qpq
t matrix are given by (2.11)–(2.14) but with St in place of S. Forexample, the elements (Qpq
t )11νµ read as
(Qpqt )11νµ =
jk21
π
∫
St
[n (r′
t) × M qµ (k2r
′t)]· Np
ν (k1r′t)
+√
ε2
ε1
[n (r′
t) × N qµ (k2r
′t)]· Mp
ν (k1r′t)
dS (r′t) .
Inserting (2.73) and (2.74) into (2.70), (2.71) and (2.72), using the identities(cf. (B.23), (B.24) and (B.25)),
Qpp1 (k, k) = 0 , for p = 1 or p = 3 ,
Q131 (k, k) = I ,
Q311 (k, k) = −I ,

110 2 Null-Field Method
and taking into account the transformation rules[
M1ν (ki,1r
′′1)
N1ν (ki,1r
′′1)
]
=[(Str
12
)νµ
][
M1µ (ki,1r
′′2)
N1µ (ki,1r
′′2)
]
and[
M3ν (ki,1r
′2)
N3ν (ki,1r
′2)
]
=[(Srt
21
)νµ
][
M3µ (ki,1r
′1)
N3µ (ki,1r
′1)
]
,
we obtain the system of matrix equations
Q311 (ks, ki,1)i1 + Q33
1 (ks, ki,1)i1 = −e ,
−i1 + Str12Q
112 (ki,1, ki,2)i2 = 0 ,
Srt21i1 + Q31
2 (ki,1, ki,2)i2 = 0 , (2.75)
where i1 = [cN1,µ, dN
1,µ]T, i1 = [cN1,µ, dN
1,µ]T, i2 = [cN2,µ, dN
2,µ]T, and as before,e = [aν , bν ]T is the vector containing the expansion coefficients of the incidentfield. The Str
12 matrix relates the vector spherical wave functions defined withrespect to the coordinate system O1x1y1z1 to those defined with respect tothe coordinate system O2x2y2z2, and can be expressed as the product of atranslation and a rotation matrix:
Str12 = T 11 (ki,1r12)R (α, β, γ) , (2.76)
where T and R are defined in Appendix B. The Srt21 matrix describes the
inverse transformation and is given by
Srt21 = R (−γ,−β,−α) T 33 (−ki,1r12) for r′1 > r12 . (2.77)
Since R is a block-diagonal matrix and T is a block-symmetric matrix itfollows that Str
12 and Srt21 are also block-symmetric matrices.
Solving the system of matrix equations gives
i1 = −[Q31
1 (ks, ki,1) + Q331 (ks, ki,1)Str
12T 2Srt21
]−1e ,
i1 = Str12T 2Srt
21i1 ,
i2 = −[Q31
2 (ki,1, ki,2)]−1 Srt
21i1 , (2.78)
where
T 2 = −Q112 (ki,1, ki,2)
[Q31
2 (ki,1, ki,2)]−1
is the transition matrix of the inhomogeneity imbedded in a medium withrelative media constants εi,1 and µi,1.

2.4 Inhomogeneous Particles 111
The Stratton–Chu representation theorem for the scattered field Es in Ds,yields the expansion of the approximate scattered field EN
s in the exterior ofa sphere enclosing the particle
ENs (r1) =
N∑
ν=1
fNν M3
ν (ksr1) + gNν N3
ν (ksr1) ,
where the expansion coefficients are given by(
fNν
gNν
)
=jk2
s
π
∫
S1
[
eNi,1 (r′) ·
(N1
ν (ksr′1)
M1ν (ksr
′1)
)
+ j√
µs
εshN
i,1 (r′) ·(
M1ν (ksr
′1)
N1ν (ksr
′1)
)]
dS (r′1) .
Taking into account the expressions of the approximate surface fields givenby (2.73), we derive the matrix equation
s = Q111 (ks, ki,1) i1 + Q13
1 (ks, ki,1) i1 , (2.79)
where s = [fNν , gN
ν ]T is the vector containing the expansion coefficients ofthe scattered field. Combining (2.78) and (2.79) we see that the transitionmatrix relating the scattered field coefficients to the incident field coefficients,s = Te, is given by
T = −[Q11
1 (ks, ki,1) + Q131 (ks, ki,1) T 2
] [Q31
1 (ks, ki,1) + Q331 (ks, ki,1)T 2
]−1
,
(2.80)where
T 2 = Str12T 2Srt
21 . (2.81)
For a homogeneous particle T 2 = 0, and we obtain the result established inSect. 2.1
T = −Q111 (ks, ki)
[Q31
1 (ks, ki)]−1
.
The expression of the transition matrix can also be written as
T =
T 1 − Q131 (ks, ki,1) T 2
[Q31
1 (ks, ki,1)]−1
×
I + Q331 (ks, ki,1)T 2
[Q31
1 (ks, ki,1)]−1−1
, (2.82)
where
T 1 = −Q111 (ks, ki)
[Q31
1 (ks, ki)]−1
is the transition matrix of the host particle. If the coordinate systems O1x1y1z1
and O2x2y2z2 coincide, (2.82) is identical to the result given by Peterson and

112 2 Null-Field Method
Strom [189]. The various terms obtained by a formal expansion of the inversein (2.82) can be interpreted as various multiple-scattering contributions to thetotal transition matrix. Indeed, using the representation
T =T 1 − Q13
1 T 2
(Q31
1
)−1 I − Q33
1 T 2
(Q31
1
)−1+ ...
= T 1 − Q131 T 2
(Q31
1
)−1 − T 1Q331 T 2
(Q31
1
)−1
+Q131 T 2
(Q31
1
)−1Q33
1 T 2
(Q31
1
)−1+ . . .
we see that the term T 1 represents a reflection at S1, Q131 T 2(Q31
1 )−1 repre-sents a passage of a wave through S1 and a reflection at S2, T 1Q
331 T 2(Q31
1 )−1
represents a refraction of a wave through S1 and two consecutive reflectionsat S2 and S1, etc.
The expressions of the total transition matrix given by (2.80) or (2.82)are important in practical applications. As it has been shown by Petersonand Strom [189], this result can be extended to the case of S1 containing anarbitrary number of separate enclosures by simply replacing T 2 with the sys-tem transition matrix of the particles. In the later sections we will derive thetransition matrix for a system of particles and the present formalism will en-able us to analyze scattering by an arbitrarily shaped, inhomogeneous particlewith an arbitrary number of irregular inclusions. In this context it should bementioned that the separation of variables solution for a single sphere (theLorenz–Mie theory) can be extended to spheres with one or more eccentri-cally positioned spherical inclusions by using the translation addition theoremfor vector spherical wave functions. Theories of scattering by eccentricallystratified spheres have been derived by Fikioris and Uzunoglu [64], Borgheseet al. [22], Fuller [73], Mackowski and Jones [152] and Ngo et al. [180], whiletreatments for a sphere with multiple spherical inclusions have been renderedby Borghese et al. [20], Fuller [75] and Ioannidou and Chrissoulidis [107].A detailed review of the separation of variable method for inhomogeneousspheres has been given by Fuller and Mackowski [77]. The separation of vari-able method has also been employed in spheroidal coordinate systems byCooray and Ciric [41] and Li et al. [141] to analyze the scattering by inhomo-geneous spheroids.
2.4.2 Formulation without Addition Theorem
In our previous analysis we assumed the geometric constraint r′1 > r12 (cf.(2.77)), which originates in the use of the translation addition theorem forradiating vector spherical wave functions. In this section we present a formal-ism that avoids the use of any local origin translation. To simplify our analy-sis, we assume that the coordinate systems O1x1y1z1 and O2x2y2z2 have thesame spatial orientation and set α = β = γ = 0. We begin by defining theQpq
t (k1, i, k2, j) matrix

2.4 Inhomogeneous Particles 113
Qpqt (k1, i, k2, j) =
⎡
⎣(Qpq
t )11νµ (Qpqt )12νµ
(Qpqt )21νµ (Qpq
t )22νµ
⎤
⎦ , (2.83)
as
(Qpqt )11νµ =
jk21
π
∫
St
[n(r′
j
)× M q
µ
(k2r
′j
)]· Np
ν (k1r′i)
+√
ε2
ε1
[n(r′
j
)× N q
µ
(k2r
′j
)]· Mp
ν (k1r′i)
dS (r′) , (2.84)
(Qpqt )12νµ =
jk21
π
∫
St
[n(r′
j
)× N q
µ
(k2r
′j
)]· Np
ν (k1r′i)
+√
ε2
ε1
[n(r′
j
)× M q
µ
(k2r
′j
)]· Mp
ν (k1r′i)
dS (r′) , (2.85)
(Qpqt )21νµ =
jk21
π
∫
St
[n(r′
j
)× M q
µ
(k2r
′j
)]· Mp
ν (k1r′i)
+√
ε2
ε1
[n(r′
j
)× N q
µ
(k2r
′j
)]· Np
ν (k1r′i)
dS (r′) , (2.86)
and
(Qpqt )22νµ =
jk21
π
∫
St
[n(r′
j
)× N q
µ
(k2r
′j
)]· Mp
ν (k1r′i)
+√
ε2
ε1
[n(r′
j
)× M q
µ
(k2r
′j
)]· Np
ν (k1r′i)
dS (r′) . (2.87)
The vectors r′, r′i and r′
j are the position vectors of a point M on the surfaceSt, and are defined with respect to the origins O, Oi and Oj , respectively(Fig. 2.3). In terms of the new Qpq
t matrices, the system of matrix equations(2.75) can be written as
Q331 (ks, 1, ki,1, 1)i1 + Q31
1 (ks, 1, ki,1, 1)i1 = −e ,
−i1 + Q112 (ki,1, 1, ki,2, 2)i2 = 0 ,
−Q311 (ki,1, 2, ki,1, 1)i1 + Q31
2 (ki,1, 2, ki,2, 2)i2 = 0 , (2.88)
while the matrix equation (2.79) reads as
s = Q131 (ks, 1, ki,1, 1) i1 + Q11
1 (ks, 1, ki,1, 1) i1 . (2.89)
Using the substitution method we eliminate the unknown vector i2 from thelast two matrix equations in (2.88) and obtain

114 2 Null-Field Method
O i
O j
M
St
O
rirj
r
Fig. 2.3. Position vectors of a point M on the surface St with respect to the originsO, Oi and Oj
i1 = T 2i1 (2.90)
with
T 2 = Q112 (ki,1, 1, ki,2, 2)
[Q31
2 (ki,1, 2, ki,2, 2)]−1
Q311 (ki,1, 2, ki,1, 1) . (2.91)
Equation (2.89) and the first matrix equation in (2.88), written in compactmatrix notation as
[se
]= Q1 (ks, ki,1)
[i1i1
], (2.92)
where
Q1 (ks, ki,1) =
[Q13
1 (ks, 1, ki,1, 1) Q111 (ks, 1, ki,1, 1)
−Q331 (ks, 1, ki,1, 1) −Q31
1 (ks, 1, ki,1, 1)
]
, (2.93)
then yield
T = −[Q11
1 (ks, 1, ki,1, 1) + Q131 (ks, 1, ki,1, 1) T 2
]
×[Q31
1 (ks, 1, ki,1, 1) + Q331 (ks, 1, ki,1, 1)T 2
]−1
. (2.94)
The expression of the transition matrix is identical to that given by (2.80),but the T 2 matrix is now given by (2.91) instead of (2.81). If the origins O1
and O2 coincide
Q311 (ki,1, 1, ki,1, 1) = −I
and we see that the T 2 matrix is the transition matrix of the inhomogeneity:
T 2 = T 2 = −Q112 (ki,1, 1, ki,2, 1)
[Q31
2 (ki,1, 1, ki,2, 1)]−1
.
This formalism will be used in Sect. 2.5 to derive a recurrence relation for thetransition matrix of a multilayered particle.

2.5 Layered Particles 115
2.5 Layered Particles
A layered particle is an inhomogeneous particle consisting of several consec-utively enclosing surfaces Sl, l = 1, 2, . . . ,N . Each surface Sl is defined withrespect to a coordinate system Olxlylzl and we assume that the coordinatesystems Olxlylzl have the same spatial orientation. The layered particle isimmersed in a medium with optical constants εs and µs, while the relativemedia constants and the wave number in the domain between Sl and Sl+1
are εi,l, µi,l and ki,l, respectively. The geometry of a (multi)layered particle isshown in Fig. 2.4. The case N = 2 has been treated in the previous sectionand the objective of the present analysis is to extend the results establishedfor two-layered particles to multilayered particles.
2.5.1 General Formulation
For a particle with N layers, the system of matrix equations consists in thenull-field equations in the interior of S1,
Q331 (ks, 1, ki,1, 1)i1 + Q31
1 (ks, 1, ki,1, 1)i1 = −e , (2.95)
the null-field equations in the exterior of Sl−1 and the interior of Sl
−il−1 + Q13l (ki,l−1, l − 1, ki,l, l)il
+Q11l (ki,l−1, l − 1, ki,l, l)il = 0 , (2.96)
−Q31l−1(ki,l−1, l, ki,l−1, l − 1)il−1 + Q33
l (ki,l−1, l, ki,l, l)il
+Q31l (ki,l−1, l, ki,l, l)il = 0 (2.97)
l = 2, 3, . . . ,N − 1
the null-field equations in the exterior of SN−1 and the interior of SN
O1
D i,l-1
Ds
S1
O l
D i,l-2
SlSN
ON
O l
O l-1
Sl
Sl-1
D i,l
Fig. 2.4. Geometry of a multilayered particle

116 2 Null-Field Method
−iN−1 + Q11N (ki,N−1,N − 1, ki,N ,N )iN = 0 , (2.98)
−Q31N−1(ki,N−1,N , ki,N−1,N − 1)iN−1 + Q31
N (ki,N−1,N , ki,N ,N )iN = 0(2.99)
and the matrix equation corresponding to the scattered field representation
s = Q131 (ks, 1, ki,1, 1) i1 + Q11
1 (ks, 1, ki,1, 1) i1 . (2.100)
For two consecutive layers, the surface fields il−1 and il−1 are related to thesurface fields il and il by the matrix equation
[il−1
il−1
]= Ql (ki,l−1, ki,l)
[il
il
], (2.101)
where
Ql (ki,l−1, ki,l) =
[I 0
0[Q31
l−1(ki,l−1, l, ki,l−1, l − 1)]−1
]
(2.102)
×[
Q13l (ki,l−1, l − 1, ki,l, l) Q11
l (ki,l−1, l − 1, ki,l, l)Q33
l (ki,l−1, l, ki,l, l) Q31l (ki,l−1, l, ki,l, l)
]
and l = 2, 3, . . . ,N − 1. For the surface fields iN−1and iN−1, that is, forl = N , we have
iN−1 = TN iN−1 (2.103)
with
TN = Q11N (ki,N−1,N − 1, ki,N ,N )
[Q31
N (ki,N−1,N , ki,N ,N )]−1
×Q31N−1(ki,N−1,N , ki,N−1,N − 1) . (2.104)
Then, using the matrix equation[
se
]= Q1 (ks, ki,1)
[i1i1
]
with Q1 being given by (2.93), we see that[
se
]= Q
[iN−1
iN−1
],
where
Q = Q1 (ks, ki,1)Q2 (ki,1, ki,2) . . .QN−1 (ki,N−2, ki,N−1) .
Finally, using (2.103) and denoting by (Q)ij , i, j = 1, 2, the block-matrixcomponents of Q, we obtain the expression of the transition matrix in termsof Q and TN :

2.5 Layered Particles 117
T =[(Q)12 + (Q)11 TN
] [(Q)22 + (Q)21 TN
]−1
.
The structure of the above equations is such that a recurrence relation forcomputing the transition matrix can be established. For this purpose, wedefine the matrix T l+1,l+2,...,N as
il = T l+1,l+2,...,N il .
and use (2.101) to obtain
il−1 =[(Ql)
12 + (Ql)11
T l+1,l+2,...,N]il ,
il−1 =[(Ql)
22 + (Ql)21
T l+1,l+2,...,N]il ,
where (Ql)ij , i, j = 1, 2, are the block-matrix components of Ql(ki,l−1, ki,l).Hence, the matrix T l,l+1,...,N , satisfying il−1 = T l,l+1,...,N il−1, can be com-puted by using the downward recurrence relation
T l,l+1,...,N =[(Ql)
12 + (Ql)11
T l+1,l+2,...,N]
×[(Ql)
22 + (Ql)21
T l+1,l+2,...,N]−1
(2.105)
for l = N − 1,N − 2, . . . , 1. For l = N − 1, TN is given by (2.104), while forl = 1, Ql is the matrix Q1(ks, ki,1) and T l,l+1,...,N is the transition matrix ofthe layered particle
T = T 1,2,...,N = −[Q11
1 (ks, 1, ki,1, 1) + Q131 (ks, 1, ki,1, 1) T 2,3,...,N
]
×[Q31
1 (ks, 1, ki,1, 1) + Q331 (ks, 1, ki,1, 1)T 2,3,...,N
]−1
.
If the origins coincide, the above relations simplify considerably, since
Ql (ki,l−1, ki,l) =
[Q13
l (ki,l−1, 1, ki,l, 1) Q11l (ki,l−1, 1, ki,l, 1)
−Q33l (ki,l−1, 1, ki,l, 1) −Q31
l (ki,l−1, 1, ki,l, 1)
]
(2.106)
and
TN = TN = −Q11N (ki,N−1, 1, ki,N , 1)
[Q31
N (ki,N−1, 1, ki,N , 1)]−1
.
We obtain
T l,l+1,...,N = −[Q11
l (ki,l−1, 1, ki,l, 1) + Q13l (ki,l−1, 1, ki,l, 1)T l+1,l+2,...,N
]
×[Q31
l (ki,l−1, 1, ki,l, 1) + Q33l (ki,l−1, 1, ki,l, 1)T l+1,l+2,...,N
]−1
(2.107)

118 2 Null-Field Method
and further
T l,l+1,...,N =T l − Q13
l (ki,l−1, 1, ki,l, 1)T l+1,l+2,...,N
×[Q31
l (ki,l−1, 1, ki,l, 1)]−1
I + Q33l (ki,l−1, 1, ki,l, 1)
× T l+1,l+2,...,N[Q31
l (ki,l−1, 1, ki,l, 1)]−1−1
(2.108)
of which (2.82) is the simplest special case. Note that in (2.107) and (2.108),T l,l+1,...,N is the total transition matrix of the layered particle with outersurface Sl.
2.5.2 Practical Formulation
In practical computer calculations it is simpler to solve the system of matrixequations (2.95)–(2.99) for all unknown vectors il and il, l = 1, 2, . . . ,N − 1,and iN . For this purpose, we consider the global matrix
A =
⎡
⎢⎢⎢⎢⎢⎢⎢⎣
A1 0 0 ... 0 0
A12 A21 0 ... 0 0
0 A23 A32 ... 0 0
0 0 0 ... AN−1,N−2 0
0 0 0 ... AN−1,N AN
⎤
⎥⎥⎥⎥⎥⎥⎥⎦
,
where
A1 =[Q33
1 (ks, 1, ki,1, 1)Q311 (ks, 1, ki,1, 1)
], (2.109)
Al,l−1 =
[Q13
l (ki,l−1, l − 1, ki,l, l) Q11l (ki,l−1, l − 1, ki,l, l)
Q33l (ki,l−1, l, ki,l, l) Q31
l (ki,l−1, l, ki,l, l)
]
, (2.110)
Al−1,l =
[−I 0
0 −Q31l−1(ki,l−1, l, ki,l−1, l − 1)
]
, (2.111)
and
AN =
[Q11
N (ki,N−1,N − 1, ki,N ,N )Q31
N (ki,N−1,N , ki,N ,N )
]
. (2.112)
Then, denoting by A the inverse of A,
A = A−1 =
⎡
⎢⎢⎣
A11 A12 ... A1,2N−1
A21 A22 ... A2,2N−1
A2N−1,1 A2N−1,2 ... A2N−1,2N−1
⎤
⎥⎥⎦ ,

2.5 Layered Particles 119
we express i1 and i1 as
i1 = −A11e , i1 = −A21e ,
and use (2.100) to obtain
T = −[Q13
1 (ks, 1, ki,1, 1)A11 + Q111 (ks, 1, ki,1, 1)A21
].
For axisymmetric layers and axial positions of the origins Ol (along the z-axisof rotation), the scattering problem decouples over the azimuthal modes andthe transition matrix can be computed separately for each m. Specifically,for each layer l, we compute the Ql matrices and assemble these matricesinto the global matrix A. The matrix A is inverted, and the blocks 11 and21 of the inverse matrix are used for T -matrix calculation. Because A is asparse matrix, appropriate LU–factorization routines (for sparse systems ofequations) can be employed.
An important feature of this solution method is that the expansion ordersof the surface field approximations can be different. To derive the dimensionof the global matrix A, we consider an axisymmetric particle. If Nrank(l) isthe maximum expansion order of the layer l and, for a given azimuthal modem, 2Nmax(l) × 2Nmax(l) is the dimension of the corresponding Q matrices,where
Nmax(l) =
Nrank(l) ,
Nrank(l) − |m| + 1 ,
m = 0m = 0 ,
then, the dimension of the global matrix A is given by
dim (A) = 2Nmax × 2Nmax ,
with
Nmax = Nmax (N ) + 2N−1∑
l=1
Nmax(l) .
The dimension and occupation of the matrix A is shown in Table 2.2 for threelayers.
Since
dim(A11)
= dim(A21)
= dim(Q13
1
)= dim
(Q11
1
)= 2Nmax(1) × 2Nmax(1) ,
it follows that
dim (T ) = 2Nmax(1) × 2Nmax(1) .
Thus, the dimension of the transition matrix is given by the maximum ex-pansion order corresponding to the first layer, while the maximum expansion

120 2 Null-Field Method
Table 2.2. Occupation of the global matrix
2Nmax(1) 2Nmax(1) 2Nmax(2) 2Nmax(2) 2Nmax(3)
2Nmax(1) Q331 Q31
1 0 0 0
2Nmax(1) −I(−Q131 ) 0 Q13
2 Q112 0
2Nmax(2) 0 −Q311 Q33
2 Q312 0
2Nmax(2) 0 0 −I(−Q132 ) 0 Q11
3
2Nmax(3) 0 0 0 −Q312 Q31
3
For distributed sources, the identity matrix I is replaced by the Q13 matrix
orders corresponding to the subsequent layers are in descending order. In con-trast to these prescriptions, the solution method using a recurrence relationfor T -matrix calculation requires all matrices to be of the same order, i.e.,
dim (T ) = dim(T l,l+1,...,N
)=
12dim (Ql) = 2Nmax(1) × 2Nmax(1) .
This requirement implies that the same number of basis functions must beused to approximate the surface fields on each layer. For concentrically lay-ered spheres, this requirement is not problematic because the basis functionsare orthogonal on spherical surfaces. For nonspherical layered particles, weapproximate the surface fields by a complete system of vector functions and itis natural to use fewer basis functions for smaller layer surfaces. However, forconvergence tests it is simpler to consider a single truncation index [181,248].
2.5.3 Formulation with Discrete Sources
For a two-layered particle as shown in Fig. 2.2, the null-field equations for-mulated in terms of distributed vector spherical wave functions (compare to(2.70), (2.71) and (2.72))
jk2s
π
∫
S1
[ei,1 (r′1) − ee (r′
1)] ·(
N 3ν (ksr
′1)
M3ν (ksr
′1)
)
(2.113)
+ j√
µs
εs[hi,1 (r′
1) − he (r′1)] ·(M3
ν (ksr′1)
N 3ν (ksr
′1)
)
dS (r′1) = 0 , ν = 1, 2, . . . ,
−jk2
i,1
π
∫
S1
[
ei,1 (r′1) ·(
N 1ν (ki,1r
′1)
M1ν(ki,1r
′1)
)
+ j√
µi,1
εi,1hi,1 (r′
1) ·(M1
ν(ki,1r′1)
N 1ν (ki,1r
′1)
)]
dS (r′1)

2.5 Layered Particles 121
+jk2
i,1
π
∫
S2
[
ei,2 (r′′2) ·(
N 1ν (ki,1r
′′1)
M1ν(ki,1r
′′1)
)
(2.114)
+ j√
µi,1
εi,1hi,2 (r′′
2) ·(M1
ν(ki,1r′′1)
N 1ν (ki,1r
′′1)
)]
dS (r′′2) = 0 , ν = 1, 2, . . . ,
and
−jk2
i,1
π
∫
S1
[
ei,1 (r′1) ·(
N 3ν (ki,1r
′2)
M3ν(ki,1r
′2)
)
+ j√
µi,1
εi,1hi,1 (r′
1) ·(M3
ν(ki,1r′2)
N 3ν (ki,1r
′2)
)]
dS (r′1)
+jk2
i,1
π
∫
S2
[
ei,2 (r′′2) ·(
N 3ν (ki,1r
′′2)
M3ν(ki,1r
′′2)
)
(2.115)
+ j√
µi,1
εi,1hi,2 (r′′
2) ·(M3
ν(ki,1r′′2)
N 3ν (ki,1r
′′2)
)]
dS (r′′2) = 0 , ν = 1, 2, . . .
are equivalent to the general null-field equations (2.68) and (2.69). The dis-tributed vector spherical wave functions in (2.113)–(2.115) are defined as
M1,3mn(kr1) = M1,3
m,|m|+l [k(r1 − z1,nez)] ,
N 1,3mn(kr1) = N1,3
m,|m|+l [k(r1 − z1,nez)] ,
and
M1,3mn(kr2) = M1,3
m,|m|+l [k(r2 − z2,nez)] ,
N 1,3mn(kr2) = N1,3
m,|m|+l [k(r2 − z2,nez)] ,
where z1,n∞n=1 is a dense set of points situated on the z-axis and in theinterior of S1, while z2,n∞n=1 is a dense set of points situated on the z-axis andin the interior of S2. Due to their completeness property, the distributed vectorspherical wave functions can be used to approximate the surface fields as in(2.73) and (2.74) but with M1,3
µ (ki,1r′1), N 1,3
µ (ki,1r′1) in place of M1,3
µ (ki,1r′1),
N1,3µ (ki,1r
′1) and M1
µ(ki,2r′′2), N 1
µ(ki,2r′′2) in place of M1
µ(ki,2r′′2), N1
µ(ki,2r′′2),
respectively.For a multilayered particle, it is apparent that the solution methods with
distributed sources use essentially the same matrix equations as the solutionmethods with localized sources. The matrices A1, Al,l−1 and AN are givenby (2.109), (2.110) and (2.112), respectively, with Q
pq
l in place of Qpql , while
the matrix Al−1,l is

122 2 Null-Field Method
Al−1,l =
⎡
⎣−Q13
l−1(ki,l−1, l − 1, ki,l−1, l − 1) 0
0 −Q31
l−1(ki,l−1, l, ki,l−1, l − 1)
⎤
⎦ .
The expressions of the elements of the Qpq
l matrix are given by (2.84)–(2.87)with the localized vector spherical wave functions replaced by the distributedvector spherical wave functions. The transition matrix is
T =[Q
13
1 (ks, 1, ki,1, 1)A11 + Q11
1 (ks, 1, ki,1, 1)A21]
×Q31
1 (ks, 1, ks, 1) ,
where the Q11
1 (ks, 1, ki,1, 1) and Q13
1 (ks, 1, ki,1, 1) matrices contain as rowsthe vectors M1
ν(ksr′1), N1
ν(ksr′1) and as columns the vectors M1
µ(ki,1r′1),
N 1µ(ki,1r
′1) and M3
µ(ki,1r′1), N 3
µ(ki,1r′1), respectively, while the Q
31(ks, 1, ks, 1)
matrix contains as rows and columns the vectors M3ν(ksr
′1), N 3
ν (ksr′1) and
M1µ(ksr
′1), N1
µ(ksr′1), respectively.
The use of distributed vector spherical wave functions improves the nu-merical stability of the null-field method for highly elongated and flattenedlayered particles. Although the above formalism is valid for nonaxisymmetricparticles, the method is most effective for axisymmetric particles, in which casethe z-axis of the particle coordinate system is the axis of rotation. Applica-tions of the null-field method with distributed sources to axisymmetric layeredspheroids with large aspect ratios have been given by Doicu and Wriedt [50].
2.5.4 Concentrically Layered Spheres
For a concentrically layered sphere, the precedent relations simplify to thoseobtained in the framework of the Lorenz–Mie theory. In this specific case, weuse the recurrence relation (2.107) with Ql given by (2.106). All matrices arediagonal and denoting by (Tl,l+1,...,N )1n and (Tl,l+1,...,N )2n the elements of thematrix T l,l+1,...,N , we rewrite the recurrence relation as
(Tl,l+1,...,N )1n
= − jn (xl) [mr,lxljn (mr,lxl)]′rn − jn (mr,lxl) [xljn (xl)]
′pn
h(1)n (xl) [mr,lxljn (mr,lxl)]
′rn − jn (mr,lxl)
[xlh
(1)n (xl)
]′pn
,
(2.116)
(Tl,l+1,...,N )2n
= −jn (xl) [mr,lxljn (mr,lxl)]
′qn − m2
r,ljn (mr,lxl) [xljn (xl)]′sn
h(1)n (xl) [mr,lxljn (mr,lxl)]
′qn − m2
r,ljn (mr,lxl)[xlh
(1)n (xl)
]′sn
,
(2.117)

2.5 Layered Particles 123
where
pn = 1 + (Tl+1,l+2,...,N )1nh
(1)n (mr,lxl)jn (mr,lxl)
, (2.118)
sn = 1 + (Tl+1,l+2,...,N )2nh
(1)n (mr,lxl)jn (mr,lxl)
, (2.119)
rn = 1 + (Tl+1,l+2,...,N )1n
[mr,lxlh
(1)n (mr,lxl)
]′
[mr,lxljn (mr,lxl)]′ , (2.120)
qn = 1 + (Tl+1,l+2,...,N )2n
[mr,lxlh
(1)n (mr,lxl)
]′
[mr,lxljn (mr,lxl)]′ , (2.121)
xl = ki,lRl = k0mlRl is the size parameter of the layer l and
mr,l =ml
ml−1
is the relative refractive index of the layer l with respect to the layer l − 1.To obtain a stable scheme for computing the T matrix, we express the aboverecurrence relation in terms of the logarithmic derivatives An and Bn:
(Tl,l+1,...,N )1n = −
[mr,lAn (mr,lxl) rn + n
xlpn
]jn (xl) − jn−1 (xl) pn
[mr,lAn (mr,lxl) rn + n
xlpn
]h
(1)n (xl) − h
(1)n−1 (xl) pn
,
(2.122)
(Tl,l+1,...,N )2n = −
[An(mr,lxl)
mr,lqn + n
xlsn
]jn (xl) − jn−1 (xl) sn
[An(mr,lxl)
mr,lqn + n
xlsn
]h
(1)n (xl) − h
(1)n−1 (xl) sn
, (2.123)
where pn and sn are given by (2.118) and (2.119), respectively, and rn and qn
are now given by
rn = 1 + (Tl+1,l+2,...,N )1nBn (mr,lxl)An (mr,lxl)
h(1)n (mr,lxl)jn (mr,lxl)
and
qn = 1 + (Tl+1,l+2,...,N )2nBn (mr,lxl)An (mr,lxl)
h(1)n (mr,lxl)jn (mr,lxl)
,
respectively.The computation of Lorenz–Mie coefficients for concentrically layered
spheres has been considered by Kerker [115], Toon and Ackerman [222], andFuller [76], while recursive algorithms for multilayered spheres have been de-veloped by Bhandari [13] and Mackowski et al. [154].

124 2 Null-Field Method
2.6 Multiple Particles
In this section we extend the null-field method to the case of an arbitrarynumber of particles by using the translation properties of the vector sphericalwave functions. Taking into account the geometric restriction that the parti-cles do not overlap in space, we derive the expression of the transition matrixfor restricted values of translations. Our treatment closely follows the originalderivation given by Peterson and Strom [187,188].
2.6.1 General Formulation
For reasons of clarity of the presentation we first consider the generic case oftwo homogeneous particles immersed in a homogeneous medium with a rela-tive permittivity εs and a relative permeability µs. The scattering geometryis depicted in Fig. 2.5. The surfaces S1 and S2 are defined with respect to theparticle coordinate systems O1x1y1z1 and O2x2y2z2, respectively, while thecoordinate system of the ensemble or the global coordinate system is denotedby Oxyz. The coordinate system O1x1y1z1 is obtained by translating the co-ordinate system Oxyz through r01 and by rotating the translated coordinatesystem through the Euler angles α1, β1 and γ1. Similarly, the coordinate sys-tem O2x2y2z2 is obtained by translating the coordinate system Oxyz throughr02 and by rotating the translated coordinate system through the Euler an-gles α2, β2 and γ2. The main assumption of our analysis is that the smallestcircumscribing spheres of the particles centered at O1 and O2, respectively,do not overlap. The boundary-value problem for the two scattering particlesdepicted in Fig. 2.5 has the following formulation.
Given the external excitation Ee,He as an entire solution to the Maxwellequations, find the scattered field Es, Hs and the internal fields Ei,1, H i,1
O1
Di,1
Ds
S1
n1
O2
M1M2
P
r199
r299r19
r29
r01 r02 S2Di,2
r12
n2
O
r1 r2r
r9 r99
Fig. 2.5. Geometry of two scattering particles

2.6 Multiple Particles 125
and Ei,2, H i,2 satisfying the Maxwell equations
∇× Es = jk0µsHs , ∇× Hs = −jk0εsEs in Ds , (2.124)
∇× Ei,1 = jk0µi,1H i,1 , ∇× H i,1 = −jk0εi,1Ei,1 in Di,1 , (2.125)
and
∇× Ei,2 = jk0µi,2H i,2 , quad∇× H i,2 = −jk0εi,2Ei,2 in Di,2 , (2.126)
the boundary conditions
n1 × Ei,1 − n1 × Es = n1 × Ee ,
n1 × H i,1 − n1 × Hs = n1 × He (2.127)
on S1 and
n2 × Ei,2 − n2 × Es = n2 × Ee ,
n2 × H i,2 − n2 × Hs = n2 × He (2.128)
on S2, and the Silver–Muller radiation condition for the scattered field (2.3).The Stratton–Chu representation theorem for the scattered field Es in Di,1
and Di,2 together with the boundary conditions (2.127) and (2.128) yield thegeneral null-field equation
Ee(r) + ∇×∫
S1
ei,1 (r′) g (ks, r, r′) dS (r′)
+j
k0εs∇×∇×
∫
S1
hi,1 (r′) g (ks, r, r′) dS (r′)
+∇×∫
S2
ei,2 (r′′) g (ks, r, r′′) dS (r′′)
+j
k0εs∇×∇×
∫
S2
hi,2 (r′′) g (ks, r, r′′) dS (r′′) = 0 , r ∈ Di,1 ∪ Di,2 .
Before we derive the null-field equations, we seek to find a relation betweenthe expansion coefficients of the incident field in the global coordinate systemOxyz,
Ee(r) =∑
ν
aνM1ν (ksr) + bνN1
ν (ksr)
and the expansion coefficients of the incident field in the particle coordinatesystem O1x1y1z1,
Ee (r1) =∑
ν
a1,νM1ν (ksr1) + b1,νN1
ν (ksr1) .

126 2 Null-Field Method
O1
Ds
S
M
r1
r01 O
r
Fig. 2.6. Auxiliary surface S
For this purpose we choose a sufficiently large auxiliary surface S enclosingO and O1 (Fig. 2.6) and in each coordinate system we use the Stratton–Churepresentation theorem for the incident field in the interior of S. We obtain
(aν
bν
)
= − jk2s
π
∫
S
[
ee (r′)
(N3
ν (ksr′)
M3ν (ksr
′)
)
+ j√
µs
εshe (r′)
(M3
ν (ksr′)
N3ν (ksr
′)
)]
dS (r′) ,
and(
a1,ν
b1,ν
)
= − jk2s
π
∫
S
[
ee (r′1)
(N3
ν (ksr′1)
M3ν (ksr
′1)
)
+ j√
µs
εshe (r′
1)
(M3
ν (ksr′1)
N3ν (ksr
′1)
)]
dS (r′1) ,
respectively. Using the addition theorem for radiating vector spherical wavefunctions
[M3
ν (ksr′1)
N3ν (ksr
′1)
]
=[(Srt
10
)νµ
][
M3µ (ksr
′)N3
µ (ksr′)
]
,
where
Srt10 = R (−γ1,−β1,−α1) T 33 (−ksr01) , for r′ > r01
and taking into account that Srt10 is a block-symmetric matrix, yields
[a1,ν
b1,ν
]=[(Srt
10
)νµ
] [aµ
bµ
]. (2.129)

2.6 Multiple Particles 127
The condition r′ > r01 can always be satisfied in practice by an appropriatechoice of the auxiliary surface S, whence, using the identity T 33(−ksr01) =T 11(−ksr01), we see that
Srt10 = R (−γ1,−β1,−α1) T 11 (−ksr01) .
We proceed now to derive the set of null-field equations. Passing from theorigin O to the origin O1, using the relations
g (ks, r, r′) = g (ks, r1, r′1) ,
g (ks, r, r′′) = g (ks, r1, r′′1) ,
and restricting r1 to lie on a sphere enclosed in Di,1, gives
jk2s
π
∫
S1
[
ei,1 (r′1) ·(
N3ν(ksr
′1)
M3ν(ksr
′1)
)
+ j√
µs
εshi,1 (r′
1) ·(
M3ν(ksr
′1)
N3ν(ksr
′1)
)]
dS (r′1)
+jk2
s
π
∫
S2
[
ei,2 (r′′2) ·(
N3ν (ksr
′′1)
M3ν(ksr
′′1)
)
(2.130)
+ j√
µs
εshi,2 (r′′
2) ·(
M3ν(ksr
′′1)
N3ν(ksr
′′1)
)]
dS (r′′2) = −
(a1,ν
b1,ν
)
, ν = 1, 2, ... ,
where the identities ei,2(r′′2) = ei,2(r′′
1) and hi,2(r′′2) = hi,2(r′′
1) have beenused. For the general null-field equation in Di,2 we proceed analogously butrestrict r2 to lie on a sphere enclosed in Di,2. We obtain
jk2s
π
∫
S1
[
ei,1 (r′1) ·(
N3ν(ksr
′2)
M3ν(ksr
′2)
)
+ j√
µs
εshi,1 (r′
1) ·(
M3ν(ksr
′2)
N3ν(ksr
′2)
)]
dS (r′1)
+jk2
s
π
∫
S2
[
ei,2 (r′′2) ·(
N3ν (ksr
′′2)
M3ν(ksr
′′2)
)
(2.131)
+ j√
µs
εshi,2 (r′′
2) ·(
M3ν(ksr
′′2)
N3ν(ksr
′′2)
)]
dS (r′′2) = −
(a2,ν
b2,ν
)
, ν = 1, 2, ... ,
where, as before, we have taken into account that ei,1(r′1) = ei,1(r′
2) andhi,1(r′
1) = hi,1(r′2).

128 2 Null-Field Method
The surface fields ei,1, hi,1 and ei,2, hi,2 are the tangential componentsof the electric and magnetic fields in the domains Di,1 and Di,2, respectively,and the surface fields approximations can be expressed as linear combinationsof regular vector spherical wave functions,
(eN
i,1(r′1)
hNi,1(r
′1)
)
=N∑
µ=1
cN1,µ
⎛
⎝n1(r′
1) × M1µ(ki,1r
′1)
−j√
εi,1µi,1
n1(r′1) × N1
µ(ki,1r′1)
⎞
⎠
+dN1,µ
⎛
⎝n1(r′
1) × N1µ(ki,1r
′1)
−j√
εi,1µi,1
n1(r′1) × M1
µ(ki,1r′1)
⎞
⎠ (2.132)
and(
eNi,2(r
′′2)
hNi,2(r
′′2)
)
=N∑
µ=1
cN2,µ
⎛
⎝n2(r′′
2) × M1µ(ki,2r
′′2)
−j√
εi,2µi,2
n2(r′′2) × N1
µ(ki,2r′′2)
⎞
⎠
+dN2,µ
⎛
⎝n2(r′′
2) × N1µ(ki,2r
′′2)
−j√
εi,2µi,2
n2(r′′2) × M1
µ(ki,2r′′2)
⎞
⎠ . (2.133)
Inserting (2.132) and (2.133) into (2.130) and (2.131), using the addition the-orem for vector spherical wave functions
[M3
ν (ksr′′1)
N3ν (ksr
′′1)
]
=[(
Srtr12
)
νµ
] [M1
µ (ksr′′2)
N1µ (ksr
′′2)
]
with
Srtr12 = R (−γ1,−β1,−α1) T 31 (ksr12)R (α2, β2, γ2) , for r′′2 < r12 ,
and[
M3ν (ksr
′2)
N3ν (ksr
′2)
]
=[(
Srtr21
)
νµ
] [M1
µ (ksr′1)
N1µ (ksr
′1)
]
,
with
Srtr21 = R (−γ2,−β2,−α2) T 31 (−ksr12)R (α1, β1, γ1) for r′1 < r12 ,
and taking into account the transformation rule for the incident field coeffi-cients (2.129), yields the system of matrix equations
Q311 (ks, ki,1)i1 + Srtr
12 Q112 (ks, ki,2)i2 = −Srt
10e ,
Srtr21 Q11
1 (ks, ki,1)i1 + Q312 (ks, ki,2)i2 = −Srt
20e , (2.134)

2.6 Multiple Particles 129
where i1 = [cN1,µ, dN
1,µ]T, i2 = [cN2,µ, dN
2,µ]T, and as usually, e = [aν , bν ]T is thevector containing the expansion coefficients of the incident field in the globalcoordinate system. Further, defining the scattered field coefficients
s1 = Q111 (ks, ki,1)i1 ,
s2 = Q112 (ks, ki,2)i2 ,
and introducing the individual transition matrices,
T 1 = −Q111 (ks, ki,1)
[Q31
1 (ks, ki,1)]−1
,
T 2 = −Q112 (ks, ki,2)
[Q31
2 (ks, ki,2)]−1
,
we rewrite the matrix system (2.134) as
s1 − T 1Srtr12 s2 = T 1Srt
10e ,
s2 − T 2Srtr21 s1 = T 2Srt
20e ,
and find the solutions
s1 = T 1
(I − Srtr
12 T 2Srtr21 T 1
)−1 (Srt
10 + Srtr12 T 2Srt
20
),
s2 = T 2
(I − Srtr
21 T 1Srtr12 T 2
)−1 (Srt
20 + Srtr21 T 1Srt
10
). (2.135)
To compute the T matrix of the two-particles system and to derive a scattered-field expansion centered at the origin O of the global coordinate system weuse the Stratton–Chu representation theorem for the scattered field Es inDs. In the exterior of a sphere enclosing the particles, the expansion of theapproximate scattered field EN
s in terms of radiating vector spherical wavefunctions reads as
ENs (r) =
N∑
ν=1
fNν M3
ν (ksr) + gNν N3
ν (ksr) ,
where the expansion coefficients are given by(
fNν
gNν
)
=jk2
s
π
∫
S1
[
eNi,1 (r′
1)
(N1
ν (ksr′)
M1ν (ksr
′)
)
+ j√
µs
εshN
i,1 (r′1)
(M1
ν (ksr′)
N1ν (ksr
′)
)]
dS (r′1)
+jk2
s
π
∫
S2
[
eNi,2 (r′′
2)
(N1
ν (ksr′′)
M1ν (ksr
′′)
)
+ j√
µs
εshN
i,2 (r′′2)
(M1
ν (ksr′′)
N1ν (ksr
′′)
)]
dS (r′′2) . (2.136)

130 2 Null-Field Method
Finally, using the addition theorem for the regular vector spherical wave func-tions
[M1
ν (ksr′)
N1ν (ksr
′)
]
=[(Str
01
)νµ
][
M1µ (ksr
′1)
N1µ (ksr
′1)
]
with
Str01 = T 11 (ksr01)R (α1, β1, γ1) ,
and[
M1ν (ksr
′′)N1
ν (ksr′′)
]
=[(Str
02
)νµ
][
M1µ (ksr
′′2)
N1µ (ksr
′′2)
]
with
Str02 = T 11 (ksr02)R (α2, β2, γ2) ,
we obtain
s = Str01Q
111 (ks, ki,1)i1 + Str
02Q112 (ks, ki,2)i2
= Str01s1 + Str
02s2 , (2.137)
where s = [fNν , gN
ν ]T is the vector containing the expansion coefficients ofthe scattered field in the global coordinate system. Combining (2.135) and(2.137), and using the identities Srt
20(Srt10)
−1 = Srtr21 and Srt
10(Srt20)
−1 = Srtr12 ,
yields [187]
T = Str01T 1
(I − Srtr
12 T 2Srtr21 T 1
)−1 (I + Srtr
12 T 2Srtr21
)Srt
10
+Str02T 2
(I − Srtr
21 T 1Srtr12 T 2
)−1 (I + Srtr
21 T 1Srtr12
)Srt
20 , (2.138)
where the explicit expressions of the transformation matrices Srtr21 and Srtr
12
are given by
Srtr12 = R (−γ1,−β1,−α1) T 11 (ksr12)R (α2, β2, γ2) ,
and
Srtr21 = R (−γ2,−β2,−α2) T 11 (−ksr12)R (α1, β1, γ1) ,
respectively. Equation (2.138) gives the system transition matrix T in termsof the individual transition matrices T 1 and T 2, and the transformation ma-trices S and S. S and S involve translations of the regular and radiatingvector spherical wave functions, respectively, and geometric constraints areintroduced by the S matrices. Obviously, the geometric restrictions r12 > r′′2

2.6 Multiple Particles 131
and r12 > r′1 introduced by the S matrices are fulfilled if the smallest cir-cumscribing spheres of the particles do not overlap. The following feature ofequation (2.138) is apparent: if T 2 = 0, then T = Str
01T 1Srt10, and if T 1 = 0,
then T = Str02T 2Srt
20, as it should. In general, T is a sum of two terms, eachof which is a modification of these limiting values. The various terms in aformal expansion of the inverses occurring in (2.138) can be considered asmultiple-scattering contributions. The terms involving only T 1 and T 2 repre-sent reflections at S1 and S2, respectively, the terms involving only T 1Srtr
12 T 2
and T 2Srtr21 T 1 represent consecutive reflections at S2 and S1, and S1 and S2,
respectively, etc.
2.6.2 Formulation for a System with N Particles
The generalization of the T -matrix relation to a system with more than twoconstituents is straightforward. The system of matrix equations consists inthe null-field equations in the interior of Sl
sl − T l
N∑
p=l
Srtrlp sp = T lSrt
l0e for l = 1, 2, . . . ,N (2.139)
and the matrix equation corresponding to the scattered field representation
s =N∑
l=1
Str0lsl . (2.140)
In practical computer calculations it is convenient to consider the global ma-trix A with block-matrix components
All = I , l = 1, 2, . . . ,N ,
Alp = −T lSrtrlp , l = p , l, p = 1, 2, . . . ,N ,
and to express the solution to the system of matrix equations (2.139) as
sl =
( N∑
p=1
AlpT pSrtp0
)
e , l = 1, 2, . . . ,N , (2.141)
where A stay for A−1, and Alp, l, p = 1, 2, . . . ,N , are the block-matrix com-ponents of A. In view of (2.140), the system T -matrix becomes
T =N∑
l=1
N∑
p=1
Str0lAlpT pSrt
p0
and this transition matrix can be used to compute the scattering characteris-tics for fixed or random orientations of the ensemble [153,165].

132 2 Null-Field Method
In order to estimate the computer memory requirement it is important toknow the dimensions of the matrices involved in the calculation. If Nrank(l)and Mrank(l) are the maximum expansion order and the number of azimuthalmodes for the lth particle, then the dimension of the transition matrix T l isdim(T l) = 2Nmax(l) × 2Nmax(l), where
Nmax(l) = Nrank (l) + Mrank (l) [2Nrank(l) − Mrank(l) + 1] .
The dimension of the global matrix A is
dim (A) = 2N∑
l=1
Nmax(l) × 2N∑
l=1
Nmax(l) ,
since
dim(Alp)
= dim(Alp)
= 2Nmax(l) × 2Nmax(p) .
If Nmax gives the dimension of the system T -matrix
dim (T ) = 2Nmax × 2Nmax ,
we have
dim(Srt
p0
)= 2Nmax(p) × 2Nmax ,
dim(Str
0l
)= 2Nmax × 2Nmax(l) .
In our computer code, the parameters Nmax and Nmax(l), l = 1, 2, . . . ,N , areindependent. Nmax(l) is given by the size parameter of the lth particle, whileNmax is given by the size parameter of a sphere centered at O and enclosingthe particles.
2.6.3 Superposition T -matrix Method
For a system of N particles with αl = βl = γl = 0, l = 1, 2, . . . ,N , thetransformations of the vector spherical vector wave functions involve only theaddition theorem under coordinate translations, i.e.,
Str0l = T 11 (ksr0l) ,
Srtp0 = T 11 (−ksr0p) ,
and
Srtrlp = T 31 (ksrlp)
for l, p = 1, 2, . . . ,N . Consequently, the matrix equation (2.139) takes theform

2.6 Multiple Particles 133
sl = T l
⎡
⎣T 11 (−ksr0l) e +N∑
p=l
T 31 (ksrlp) sp
⎤
⎦ , (2.142)
while (2.140) becomes
s =N∑
l=1
T 11 (ksr0l) sl . (2.143)
The precedent equations can be written in explicit form by indicating thevector and matrix indices
[(sl)ν ] = [(Tl)νν′ ]
⎧⎨
⎩
[T 11
ν′µ(−ksr0l)
][eµ]
N∑
p=l
[T 31
ν′µ(ksrlp)
] [(sp)µ
]⎫⎬
⎭,
(2.144)
[sν ] =N∑
l=1
[T 11
νµ (ksr0l)] [
(sl)µ
], (2.145)
and can also be derived by using the so-called superposition T -matrix method[169]. The superposition T -matrix method reproduces the two cooperative ef-fects characterizing aggregate scattering: interaction between particles andfar-field interference [273]. The interaction effect take into account that eachparticle is excited by the initial incident field and the fields scattered byall other particles, while the far-field interference is a result of the incidentand scattered phase differences from different particles. The superpositionT -matrix method involves the following general steps:
1. The expansions of the incident and scattered fields in each particle coor-dinate system.
2. The representation of the field exciting a particle by a single-field expan-sion (which includes the incident field and the scattered fields from allother particles).
3. The solution of the transmission boundary-value problem for each particle.4. The derivation of the scattered-field expansion in the global coordinate
system.
The interaction effect is taken into account in steps 2 and 3, where the scat-tered fields from other particles are transformed and included in the incidentfield on each particle, while the interference effect is taken into account insteps 1 and 4 that address the incident and scattered path differences, respec-tively. For a system of N spheres, the individual component T matrices arediagonal with the standard Lorenz–Mie coefficients along their main diago-nal, and in this case, the superposition T -matrix method is also known as themultisphere separation of variables technique or the multisphere superposi-tion method [21, 24, 29, 72, 150]. Solution of (2.144) have been obtained usingdirect matrix inversion, method of successive orders of scattering, conjugate

134 2 Null-Field Method
gradient methods and iterative approaches [74, 95, 198, 244, 271]. Originallyall methods were implemented for spherical particles, but Xu [274] recentlyextended his computer code for axisymmetric particles.
In the following analysis, we derive (2.144) and (2.145) by using the su-perposition T -matrix method. The field exciting the lth particle can be ex-pressed as
Eexc,l (rl) = Ee (rl) +N∑
p=l
Es,p (rl) ,
where Ee is the incident field and Es,p is the field scattered by the pth par-ticle. In the null-field method, transformation rules between the expansioncoefficients of the incident and scattered fields in different coordinate systemshave been derived by using the integral representations for the expansion co-efficients. In the superposition T -matrix method, these transformations areobtained by using the series representations for the electromagnetic fields indifferent coordinate systems. For the external excitation, we consider the vec-tor spherical wave expansion
Ee(r) =∑
µ
aµM1µ (ksr) + bµN1
µ (ksr)
and use the addition theorem[
M1µ (ksr)
N1µ (ksr)
]
=[T 11
µν (ksr0l)][
M1ν (ksrl)
N1ν (ksrl)
]
,
to obtain
Ee (rl) =∑
ν
al,νM1ν (ksrl) + bl,νN1
ν (ksrl)
with[
al,ν
bl,ν
]=[T 11
µν (ksr0l)][
aµ
bµ
].
Similarly, for the field scattered by the pth particle, we consider the seriesrepresentation
Es,p (rp) =∑
µ
fp,µM3µ (ksrp) + gp,µN3
µ (ksrp)
and use the addition theorem[
M3µ (ksrp)
N3µ (ksrp)
]
=[T 31
µν (ksrpl)][
M1ν (ksrl)
N1ν (ksrl)
]
for rl < rpl ,

2.6 Multiple Particles 135
to derive
Es,p (rl) =∑
ν
flp,νM1ν (ksrl) + glp,νN1
ν (ksrl)
with[
flp,ν
glp,ν
]=[T 31
µν (ksrpl)][
fp,µ
gp,µ
].
Thus, the field exciting the lth particle can be expressed in terms of regularvector spherical wave functions centered at the origin Ol
Eexc,l (rl) =∑
ν
al,νM1ν (ksrl) + bl,νN1
ν (ksrl) ,
where the expansion coefficients are given by
[(el)ν ] =[T 11
µν (ksr0l)][eµ] +
N∑
p=l
[T 31
µν (ksrpl)] [
(sp)µ
]
and as usually, el = [al,ν , bl,ν ]T. Further, using the T -matrix equation sl =T lel, we obtain
[(sl)ν ] = [(Tl)νν′ ]
⎡
⎣[T 11
µν′ (ksr0l)][eµ] +
N∑
p=l
[T 31
µν′ (ksrpl)] [
(sp)µ
]⎤
⎦ , (2.146)
and since (cf. (B.74) and (B.75))[T 31
ν′µ(ksrlp)
]=[T 31
µν′ (ksrpl)]
and[T 11
ν′µ(−ksr0l)
]=[T 11
ν′µ(ksrl0)
]=[T 11
µν′ (ksr0l)]
,
we see that (2.144) and (2.146) coincide.The scattered field is a superposition of fields that are scattered from the
individual particles,
Es(r) =N∑
l=1
Es,l (rl)
=N∑
l=1
∑
µ
fl,µM3µ (ksrl) + gl,µN3
µ (ksrl) , (2.147)
whence, using the addition theorem

136 2 Null-Field Method
[M3
µ (ksrl)N3
µ (ksrl)
]
=[T 33
µν (−ksr0l)][
M3ν (ksr)
N3ν (ksr)
]
for r > r0l ,
we derive the scattered-field expansion centered at O
Es(r) =∑
ν
fνM3ν (ksr) + gνN3
ν (ksr)
with
[sν ] =N∑
l=1
[T 33
µν (−ksr0l)] [
(sl)µ
]. (2.148)
Since,[T 11
νµ (ksr0l)]
=[T 11
µν (−ksr0l)]
=[T 33
µν (−ksr0l)]
,
we see that (2.145) and (2.148) are identical.
2.6.4 Formulation with Phase Shift Terms
For an ensemble of N particles with αl = βl = γl = 0, l = 1, 2, . . . ,N , thesystem T -matrix is given by
T =N∑
l=1
N∑
p=1
T 11 (ksr0l)AlpT pT 11 (−ksr0p) . (2.149)
In (2.149), the translation matrices T 11(−ksr0p) and T 11(ksr0l) give the re-lations between the expansion coefficients of the incident and scattered fieldsin different coordinate systems. In the present analysis, these relations are de-rived by using the direct phase differences between the electromagnetic fieldsin different coordinate systems.
For a vector plane wave of unit amplitude and wave vector ke, ke = ksek,we have
Ee (rl) = epolejksek·r0lejksek·(r−r0l)
= ejksek·r0l
∑
ν
aνM1ν (ksrl) + bνN1
ν (ksrl)
=∑
ν
al,νM1ν (ksrl) + bl,νN1
ν (ksrl)
and therefore[
al,ν
bl,ν
]= ejksek·r0l
[aν
bν
].
Further, using the far-field representation of the field scattered by the lthparticle,

2.6 Multiple Particles 137
Es,l(rl) =ejksrl
rl
Es∞,l(er) + O
(1rl
)
and the approximation
ejksrl
rl=
ejksre−jkser·r0l
r
[1 + O
(1r
)],
we see that the angular-dependent vector of scattering coefficients
s (er) =N∑
l=1
e−jkser·r0lsl
approximates the s vector in the far-field region, and that the angular-dependent transition matrix
T (er) =N∑
l=1
N∑
p=1
ejks(ek·r0p−er·r0l)AlpT p (2.150)
approximates the T matrix in the far-field region. For spherical particles, thismethod is known as the generalized multiparticle Mie-solution [272,273].
Equation (2.150) shows that we have to impose
dim (T ) = dim(AlpT p
)= dim (T lp) ,
where T lp = AlpT p. Assuming dim(T ) = 2Nmax × 2Nmax, we can setNmax(p) = Nmax for all p = 1, 2, . . . ,N , and in this case, dim(T ) = dim(T p).Alternatively, we can set Nmax = maxp Nmax(p) and use the convention(Tlp)νµ ≡ 0 whenever ν > 2Nmax(l) and µ > 2Nmax(p). This formulationavoids the computation of the translation matrices T 11 and involves only theinversion of the global matrix A. The dimensions of T 11 depend on translationdistances and are proportional to the overall dimension of the cluster, whilethe dimension of A is determined by the size parameters of the individualparticles. Therefore, the generalized multiparticle Mie-solution is limited bythe largest possible individual particle size in a cluster and not by the over-all cluster size. However, the angular-dependent transition matrix can not beused in the analytical orientation-averaging procedure described in Sect. 1.5and in view of our computer implementation, this method is not effective forT -matrix calculations.
2.6.5 Recursive Aggregate T -matrix Algorithm
If the number of particles increases, the dimension of the global matrix Abecomes excessively large. Wang and Chew [250,251] proposed a recursive T -matrix algorithm, which computes the T matrix of a system of n componentsby using the transition matrices of the newly added q components and the

138 2 Null-Field Method
T matrix of the previous system of n − q components. In this section weuse the recursive T -matrix algorithm to analyze electromagnetic scatteringby a system of identical particles randomly distributed inside an “imaginary”spherical surface.
Let us consider Ncs circumscribing spheres with radii Rcs(k), k = 1, 2, . . . ,Ncs, in increasing order. Inside the sphere of radius Rcs(1) there are N (1)particles having their centers located at r
(1)0l , l = 1, 2, . . . ,N (1), and in each
spherical shell bounded by the radii Rcs(k − 1) and Rcs(k) there are N (k)particles having their centers located at r
(k)0l , l = 1, 2, . . . ,N (k). Obviously,
N =∑Ncs
p=1 N (p) is the total number of particles and Rcs(Ncs) is the radius ofthe circumscribing sphere containing the particles. For simplicity, we assumethat the particles are identical and have the same spatial orientation. Thescattering geometry for the problem under examination is depicted in Fig. 2.7.
At the first iteration step, we compute the system T -matrix T (1) of allparticles situated inside the sphere of radius Rcs(1). At the iteration step k,we compute the system T -matrix T (k) of all particles situated inside the sphereof radius Rcs(k) by considering a [N (k) + 1]-scatterer problem. In fact, thetransition matrix T (k) is computed by using the system T -matrix T (k−1) of theprevious
∑k−1p=1 N (p) particles situated inside the sphere of radius Rcs(k − 1)
and the individual transition matrix T p of all N (k) particles situated in thespherical shell between Rcs(k− 1) and Rcs(k). In this specific case, the block-matrix components of the global matrix A are given by
All = I , l = 1, 2, . . . ,N (k) + 1 ,
Alp = −T pT 31(ksr
(k)lp
), l = p , l, p = 1, 2, . . . ,N (k) ,
Al,N (k)+1 = −T pT 31(ksr
(k)l0
)= −T pT 31
(−ksr
(k)0l
), l = 1, 2, . . . ,N (k) ,
AN (k)+1,l = −T (k−1)T 31(ksr
(k)0l
), l = 1, 2, . . . ,N (k) .
O
Rcs
Rcs
Rcs
Rcs
Orol
(k)
(1)(k-1)
(k)(Ncs)
Fig. 2.7. Illustration of the recursive T -matrix algorithm for many spheres

2.7 Composite Particles 139
If A = A−1, and Alp, l, p = 1, 2, . . . ,N (k) + 1, are the block-matrix compo-nents of A, the recurrence relation for T -matrix calculation read as
T (k) = AN (k)+1,N (k)+1T (k−1) +N (k)∑
l=1
AN (k)+1,lT pT 11(−ksr
(k)0l
)
+N (k)∑
l=1
T 11(ksr
(k)0l
)⎡
⎣Al,N (k)+1T (k−1) +N (k)∑
p=1
AlpT pT 11(−ksr
(k)0p
)⎤
⎦ .
The procedure is repeated until all N particles are exhausted. At each itera-tion step, only a [N (k)+1]-scatterer problem needs to be solved, where N (k)usually is much smaller than N . Thus, we can keep the dimension of the prob-lem manageable even when N is very large. The geometric constraint of theT -matrix method requires that the N (k) particles completely reside insidethe spherical shell between Rcs(k − 1) and Rcs(k). However, for a large num-ber of particles and small size parameters, numerical simulations certify theaccuracy of the recursive scheme even if this geometric constraint is violated.
As mentioned before, the T 11(−ksr0l) matrices are used to translate theincident field from the global coordinate system to the lth particle coordinatesystem, while the T 11(ksr0l) matrices are used to translate the scattered fieldsfrom the basis of the lth particle to the global coordinate system. A recursiveT -matrix algorithm using phase shift terms instead of translation matriceshas been proposed by Auger and Stout [4].
2.7 Composite Particles
A composite particle consists of several nonenclosing parts, each character-ized by arbitrary but constant values of electric permittivity and magneticpermeability. The null-field analysis of composite particles using the additiontheorem for regular and radiating vector spherical wave functions is equivalentto the multiple scattering formalism [189]. The translation addition theoremfor radiating vector spherical wave functions introduces geometric constraintswhich are not fulfilled for composite particles. Several alternative expressionsfor the transition matrix have been derived by Strom and Zheng [219] usingthe Q matrices for open surfaces (the interfaces between the different parts ofa composite particle). In the present analysis we avoid the use of any local ori-gin translation and consider a formalism based on closed-surface Q matrices.
2.7.1 General Formulation
To simplify our presentation we first consider a composite particle with twohomogeneous parts as shown in Fig. 2.8. We assume that the surfaces S1c =S1 ∪ S12 and S2c = S2 ∪ S12 are star-shaped with respect to O1 and O2,

140 2 Null-Field Method
r19
r29r 9
r199
r299
r99
r1
r2r
O1
O
O2
M1
M2
P
Di,1
Di,2
S1
S2
S12Ds
O
O1
O2
S1
S2
S12
n1
n2
n12
n21
Fig. 2.8. Geometry of a composite particle
respectively. The main reason for introducing the star-shapedness restrictionis that we want to keep the individual constituents reasonably simple. A novelfeature is the appearance of edges, which are allowed by the basic regularityassumptions of the T -matrix formalism [256]. A composite particle can betreated by the multiple scattering formalism under appropriate geometricalconditions. The boundary-value problem for the composite particle depictedin Fig. 2.8 has the following formulation.
Given the external excitation Ee,He as an entire solution to the Maxwellequations, find the scattered field Es, Hs and the internal fields Ei,1, H i,1
and Ei,2, H i,2 satisfying the Maxwell equations
∇× Es = jk0µsHs , ∇× Hs = −jk0εsEs in Ds , (2.151)
∇× Ei,1 = jk0µi,1H i,1 , ∇× H i,1 = −jk0εi,1Ei,1 in Di,1 ,(2.152)
and
∇× Ei,2 = jk0µi,2H i,2 , ∇× H i,2 = −jk0εi,2Ei,2 in Di,2 , (2.153)
the boundary conditions
n1 × Ei,1 − n1 × Es = n1 × Ee ,
n1 × H i,1 − n1 × Hs = n1 × He (2.154)
on S1,
n2 × Ei,2 − n2 × Es = n2 × Ee ,
n2 × H i,2 − n2 × Hs = n2 × He (2.155)

2.7 Composite Particles 141
on S2, and
n12 × Ei,1 + n21 × Ei,2 = 0 ,
n12 × H i,1 + n21 × H i,2 = 0 (2.156)
on S12, and the Silver–Muller radiation condition for the scattered field (2.3).The Stratton–Chu representation theorem for the incident and scattered
fields in Di, where Di = Di,1∪Di,2∪S12 = R3−Ds, together with the boundaryconditions (2.154) and (2.155), lead to the general null-field equation
∇×∫
S1
[ei,1 (r′) − ee (r′)] g (ks, r, r′) dS (r′)
+j
k0εs∇×∇×
∫
S1
[hi,1 (r′) − he (r′)] g (ks, r, r′) dS (r′)
+∇×∫
S2
[ei,2 (r′′) − ee (r′′)] g (ks, r, r′′) dS (r′′) (2.157)
+j
k0εs∇×∇×
∫
S2
[hi,2 (r′′) − he (r′′)] g (ks, r, r′′) dS (r′′) = 0 , r ∈ Di .
Passing from the origin O to the origin O1, using the identities
g (ks, r, r′) = g (ks, r1, r′1) ,
g (ks, r, r′′) = g (ks, r1, r′′1) ,
restricting r1 to lie on a sphere enclosed in Di,1 and taking into account theintegral form of the boundary conditions (2.156)
∫
S12
ei,1 ·(
N3ν
M3ν
)
dS +∫
S12
ei,2 ·(
N3ν
M3ν
)
dS = 0 ,
∫
S12
hi,1 ·(
M3ν
N3ν
)
dS +∫
S12
hi,2 ·(
M3ν
N3ν
)
dS = 0 ,
yields
jk2s
π
∫
S1c
[ei,1 (r′1) − ee (r′
1)] ·(
N3ν(ksr
′1)
M3ν(ksr
′1)
)
+ j√
µs
εs[hi,1 (r′
1) − he (r′1)] ·(
M3ν(ksr
′1)
N3ν(ksr
′1)
)
dS (r′1)
+jk2
s
π
∫
S2c
[ei,2 (r′′2) − ee (r′′
1)] ·(
N3ν (ksr
′′1)
M3ν(ksr
′′1)
)
(2.158)
+ j√
µs
εs[hi,2 (r′′
2) − he (r′′1)] ·(
M3ν(ksr
′′1)
N3ν(ksr
′′1)
)
dS (r′′2) = 0 , ν = 1, 2, . . .

142 2 Null-Field Method
r199
r1O1
O2
P1
M2
D i,2
S2c
Sr
Fig. 2.9. Illustration of the auxiliary sphere in the exterior of S2c
The physical fact that the tangential fields are continuous across the inter-secting surface is the key to the structure of the null-field equations, and itis not used explicitly latter on. To simplify the null-field equations (2.158)we use the Stratton–Chu representation theorem for the incident field in theinterior and exterior of the closed surface S2c
(−Ee(r1)
0
)
= ∇×∫
S2c
ee (r′′1) g (ks, r1, r
′′1) dS(r′′
1)
+j
k0εs∇×∇×
∫
S2c
he (r′′1) g (ks, r1, r
′′1) dS(r′′
1) ,
(r1 ∈ Di,2
r1 ∈ R3 − Di,2
)
.
Choosing an auxiliary sphere in the exterior of S2c as in Fig. 2.9, and restrict-ing r1 to lie on this sphere, we derive
jk2s
π
∫
S2c
[
ee (r′′1) ·(
N3ν (ksr
′′1)
M3ν (ksr
′′1)
)
+ j√
µs
εshe (r′′
1) ·(
M3ν (ksr
′′1)
N3ν (ksr
′′1)
)]
dS (r′′1) = 0 , ν = 1, 2, ... ,
whence, using the identities ee(r′) = ee(r′1) and he(r′) = he(r′
1), we obtain
jk2s
π
∫
S1c
[ei,1 (r′1) − ee (r′)] ·
(N3
ν(ksr′1)
M3ν(ksr
′1)
)
+ j√
µs
εs[hi,1 (r′
1) − he (r′)] ·(
M3ν(ksr
′1)
N3ν(ksr
′1)
)
dS (r′1)
+jk2
s
π
∫
S2c
[
ei,2 (r′′2) ·(
N3ν (ksr
′′1)
M3ν(ksr
′′1)
)
(2.159)
+ j√
µs
εshi,2 (r′′
2) ·(
M3ν(ksr
′′1)
N3ν(ksr
′′1)
)]
dS (r′′2) = 0 , ν = 1, 2, . . .

2.7 Composite Particles 143
Similarly, passing from origin O to origin O2 and restricting r2 to lie on asphere enclosed in Di,2, gives
jk2s
π
∫
S1c
[
ei,1 (r′1) ·(
N3ν(ksr
′2)
M3ν(ksr
′2)
)
+ j√
µs
εshi,1 (r′
1) ·(
M3ν(ksr
′2)
N3ν(ksr
′2)
)]
dS (r′1)
+jk2
s
2
∫
S2c
[ei,2 (r′′2) − ee (r′′)] ·
(N3
ν (ksr′′2)
M3ν(ksr
′′2)
)
(2.160)
+ j√
µs
εs[hi,2 (r′′
2) − he (r′′)] ·(
M3ν(ksr
′′2)
N3ν(ksr
′′2)
)
dS (r′′2) = 0 , ν = 1, 2, . . .
The surface fields ei,1, hi,1 and ei,2, hi,2 are approximated by finite expansionsin terms of regular vector spherical wave functions as in (2.132) and (2.133)respectively. Inserting these expansions into the null-field equations (2.159)and (2.160), yields the system of matrix equations
Q311 (ks, 1, ki,1, 1)i1 + Q31
2 (ks, 1, ki,2, 2)i2 = Q311 (ks, 1, ks, 0)e ,
Q311 (ks, 2, ki,1, 1)i1 + Q31
2 (ks, 2, ki,2, 2)i2 = Q312 (ks, 2, ks, 0)e , (2.161)
where the significance of the vectors i1, i2 and e is as in Sect. 2.6. The Qmatrices involving vector spherical wave functions with arguments referringto different origins are given by (2.84)–(2.87).
To compute the scattered-field expansion centered at the origin O we usethe Stratton–Chu representation theorem for the scattered field Es in Ds. Theexpressions of the scattered field coefficients are given by (2.136) with S1c andS2c in place of S1 and S2, respectively, and in matrix form, we have
s = Q111 (ks, 0, ki,1, 1)i1 + Q11
2 (ks, 0, ki,2, 2)i2 . (2.162)
The null-field equations (2.161) and the scattered field equation (2.162) com-pletely describe the T -matrix calculation and correspond to equations (2.134)and (2.137) of Sect. 2.6.
2.7.2 Formulation for a Particle with N Constituents
For a composite particle with N constituents, the system of matrix equationsconsists in the null-field equations in the interior of Slc
N∑
p=1
Q31p (ks, l, ki,p, p)ip = Q31
l (ks, l, ks, 0)e , for l = 1, 2, . . . ,N (2.163)
and the matrix equation corresponding to the scattered field representation
s =N∑
l=1
Q11l (ks, 0, ki,l, l)il . (2.164)

144 2 Null-Field Method
Considering the global matrix A with block-matrix components
Alp = Q31p (ks, l, ki,p, p) , l, p = 1, 2, . . . ,N , (2.165)
we express the solution to the system of matrix equations (2.163) as
il =
( N∑
p=1
AlpQ31p (ks, p, ks, 0)
)
e , l = 1, 2, . . . ,N ,
where A stay for A−1, and Alp, l, p = 1, 2, . . . ,N , are the block-matrix compo-nents of A. In view of (2.164), the transition matrix of the composite particlebecomes
T =N∑
l=1
N∑
p=1
Q11l (ks, 0, ki,l, l)AlpQ31
p (ks, p, ks, 0) .
For an axisymmetric composite particle, the transition matrix is block-diagonal with each block matrix corresponding to a different azimuthal modem. Since there is no coupling between the different m indices, each block ma-trix can be computed separately. To derive the dimension of the transitionmatrix, we consider an axisymmetric particle and set
Nmax(l) =
Nrank(l) ,Nrank(l) − |m| + 1 ,
m = 0m = 0 ,
where Nrank(l) is the maximum expansion order of the region l and m is theazimuthal mode. Then, we have
dim(Q31
p
)= 2Nmax(p) × 2Nmax ,
dim(Alp)
= 2Nmax(l) × 2Nmax(p) ,
dim(Q11
l
)= 2Nmax × 2Nmax(l),
and therefore
dim (T ) = 2Nmax × 2Nmax .
Thus, Nmax gives the dimension of the transition matrix and
Nmax =
Nrank ,Nrank − |m| + 1 ,
m = 0,m = 0,
where Nrank is determined by the size parameter of the composite particle.It should be mentioned that in our computer code, Nrank and Nrank(l), l =1, 2, . . . ,N , are independent parameters controlling the T -matrix calculations.
The contributions of Zheng [276,277], Zheng and Strom [279], and Zhengand Shao [278] demonstrated the applicability of the null-field method toparticles with complex geometries and optical properties. The above formalismcan be extended to nonaxisymmetric particles in which case, the domain ofanalysis can be discretized into many volume elements with different shapesand optical constants.

2.7 Composite Particles 145
2.7.3 Formulation with Discrete Sources
For a composite particle with two constituents, the null-field equations for-mulated in terms of distributed vector spherical wave functions
jk2s
π
∫
S1c
[ei,1 (r′1) − ee (r′)] ·
(N 3
ν (ksr′1)
M3ν(ksr
′1)
)
+ [ei,1 (r′1) − ee (r′)] ·
(N 3
ν (ksr′1)
M3ν(ksr
′1)
)
dS (r′1)
+jk2
s
π
∫
S2c
[
ei,2 (r′′2) ·(
N 3ν (ksr
′′1)
M3ν(ksr
′′1)
)
(2.166)
+ j√
µs
εshi,2 (r′′
2) ·(M3
ν(ksr′′1)
N 3ν (ksr
′′1)
)]
dS (r′′2) = 0 , ν = 1, 2, . . .
and
jk2s
π
∫
S1c
[
ei,1 (r′1) ·(
N 3ν (ksr
′2)
M3ν(ksr
′2)
)
+ j√
µs
εshi,1 (r′
1) ·(M3
ν(ksr′2)
N 3ν (ksr
′2)
)]
dS (r′1)
+jk2
s
2
∫
S2c
[ei,2 (r′′2) − ee (r′′)] ·
(N 3
ν (ksr′′2)
M3ν(ksr
′′2)
)
(2.167)
+ j√
µs
εs[hi,2 (r′′
2) − he (r′′)] ·(M3
ν(ksr′′2)
N 3ν (ksr
′′2)
)
dS (r′′2) = 0 , ν = 1, 2, . . .
are equivalent to the general null-field equation (2.157). The distributed vectorspherical wave functions in (2.166)–(2.167) are defined as
M1,3mn(kr1) = M1,3
m,|m|+l [k(r1 − z1,nez)] ,
N 1,3mn(kr1) = N1,3
m,|m|+l [k(r1 − z1,nez)] ,
and
M1,3mn(kr2) = M1,3
m,|m|+l [k(r2 − z2,nez)] ,
N 1,3mn(kr2) = N1,3
m,|m|+l [k(r2 − z2,nez)] ,
where z1,n∞n=1 is a dense set of points situated on the z-axis and in theinterior of S1c, while z2,n∞n=1 is a dense set of points situated on the z-axis and in the interior of S2c. In the null-field method with discrete sources,

146 2 Null-Field Method
the approximate surface fields eNi,1, hN
i,1 and eNi,2, hN
i,2 are expressed as linearcombinations of distributed vector spherical wave functions as in (2.132) and(2.133) but with M1
µ(ki,1r′1), N 1
µ(ki,1r′1) in place of M1
µ(ki,1r′1), N1
µ(ki,1r′1)
and M1µ(ki,2r
′′2), N 1
µ(ki,2r′′2) in place of M1
µ(ki,2r′′2), N1
µ(ki,2r′′2), respectively.
For a composite particle with N constituents, the block-matrix elementsAlp are given by (2.165) with Q
31
p in place of Q31p , and the expressions of
the elements of the Q31
p matrix are given by (2.84)–(2.87) with the localizedvector spherical wave functions replaced by the distributed vector sphericalwave functions. The transition matrix is
T =N∑
l=1
N∑
p=1
Q11
l (ks, 0, ki,l, l)AlpQ31
p (ks, p, ks, 0) ,
where the Q11
l matrices contains as rows the vectors M1ν , N1
ν and as columns
the vectors M1µ, N 1
µ , while the Q31
p matrices contains as rows and columnsthe vectors M3
ν , N 3ν and M1
µ, N1µ, respectively.
For axisymmetric particles, the z-axis of the particle coordinate system isthe axis of rotation and the use of distributed vector spherical wave functionsimproves the numerical stability of the T -matrix calculations, especially forhighly elongated and flattened composite particles [51].
2.8 Complex Particles
The transition matrix for complex particles consisting of a number of arbi-trary constituents can be derived by combining the results established in theprevious sections. As an example, we consider the particle geometry depictedin Fig. 2.10. The scatterer is a composite particle with two inhomogeneousconstituents and each inhomogeneous part is a layered particle. We denoteby i1 and i1 the vectors containing the expansion coefficients of the internalfields in Di,1, by i2 and i2 the vectors containing the expansion coefficientsof the internal fields in Di,2 and by i3 and i4 the vectors containing the ex-pansion coefficients of the internal fields in Di,3 and Di,4, respectively. i1 andi2 refer to the expansion coefficients corresponding to radiating vector spher-ical wave functions, while i1, i2, i3 and i4 refer to the expansion coefficientscorresponding to regular vector spherical wave functions.
Taking into account the results established for composite particles, we seethat the null-field equations in the interior of S1c = S1∪S12 and S2c = S2∪S12
are
Q331 (ks, 1, ki,1, 1)i1 + Q31
1 (ks, 1, ki,1, 1)i1
+Q332 (ks, 1, ki,2, 2)i2 + Q31
2 (ks, 1, ki,2, 2)i2 = Q311 (ks, 1, ks, 0)e ,
and

2.8 Complex Particles 147
O4
O2
Di,1
Di,2
S2
Ds
O
O1
O3S1
Di,3
Di,4
S3
S4
S12i1, i1
i2, i2
i3
i4
Fig. 2.10. Geometry of a complex particle
Q331 (ks, 2, ki,1, 1)i1 + Q31
1 (ks, 2, ki,1, 1)i1
+Q332 (ks, 2, ki,2, 2)i2 + Q31
2 (ks, 2, ki,2, 2)i2 = Q312 (ks, 2, ks, 0)e ,
respectively. Using the results established for inhomogeneous particles, wededuce that the null-field equations in the exterior of S1c and the interior ofS3 are
−i1 + Q113 (ki,1, 1, ki,3, 3)i3 = 0 ,
−Q311 (ki,1, 3, ki,1, 1)i1 + Q31
3 (ki,1, 3, ki,3, 3)i3 = 0 ,
while the null-field equations in the exterior of S2c and the interior of S4 takethe forms
−i2 + Q114 (ki,2, 2, ki,4, 4)i4 = 0 ,
−Q312 (ki,2, 4, ki,2, 2)i2 + Q31
4 (ki,2, 4, ki,4, 4)i4 = 0 .
To derive the coefficients of the scattered-field expansion centered at O weproceed as in the case of composite particles and obtain
s = Q131 (ks, 0, ki,1, 1)i1 + Q11
1 (ks, 0, ki,1, 1)i1
+Q132 (ks, 0, ki,2, 2)i2 + Q11
2 (ks, 0, ki,2, 2)i2 .
The above equations form a system of seven equations with seven unknowns.Eliminating the vectors corresponding to the internal fields it is possible toobtain a relation between the scattered and incident field coefficients and thus,to derive the expression of the transition matrix.
The T -matrix description is also suitable for scattering configurations withseveral layered particles, Fig. 2.11, or inhomogeneous particles with severalenclosures, Fig. 2.12. In the first case, we compute the transition matrices

148 2 Null-Field Method
O1
Di,11
Ds
S11
O2
S21Di,21
O
S12 S22
Di,22Di,12
Fig. 2.11. Geometry of two layered particles
O3
D i,1
Ds
S1
O2
O
S3S2
D i,3D i,2
Fig. 2.12. Geometry of an inhomogeneous particle with two enclosures
of each layered particle with the formalism presented in Sect. 2.5, and thenuse the multiple scattering formalism to derive the transition matrix of theensemble. In the second case, we compute the transition matrix of the two-particle system, and then calculate the transition matrix of the inhomogeneousparticle using the formalism presented in Sect. 2.4. In fact, we can considerany combination of separate and consecutively enclosing surfaces and for eachcase immediately write down the expression of the transition matrix accordingto the prescriptions given in the earlier sections.
2.9 Effective Medium Model
The optical properties of heterogeneous materials are of considerable inter-est in atmospheric science, astronomy and optical particle sizing. Randomdispersions of inclusions in a homogeneous host medium can be equivalentlyconsidered as effectively homogeneous after using various homogenization for-malisms [36,210]. The effective permittivity of a heterogeneous material relates

2.9 Effective Medium Model 149
the average electric displacement to the average electric field [137],
〈D〉 = εeff 〈E〉 ,
where 〈D〉 =∫
DDdV , 〈E〉 =
∫D
E dV and D is the domain occupied bythe heterogeneous material. The effective-medium theories operate with var-ious assumptions which determine their domain of applicability. The usualderivations of the effective-medium approximations are based on electrosta-tic considerations and assume that the inclusions are much smaller than thewavelength and that the interactions between the inclusions can be neglected.The average electric displacement is expressed in terms of the average electricand polarization fields
〈D〉 = εs 〈E〉 + 〈P 〉 ,
while the average polarization field 〈P 〉 is related to the dipole moment of asingle inclusion p by the relation
〈P 〉 = n0p ,
where εs is the relative permittivity of the host medium and n0 is the numberof particles per unit volume. Defining the exciting field Eexc as the local fieldwhich exists within a fictitious cavity that has the shape of an inclusion
Eexc = 〈E〉 +1
3εs〈P 〉
and assuming that the dipole moment can be expressed in terms of the excitingfield as
p = αEexc
with α being the polarizability scalar, yields
εeff = εs3εs + 2n0α
3εs − n0α. (2.168)
The main issue in the effective-medium approximations is to relate the po-larizability α to the relative permittivity εr, where εr = εi/εs, and εi is therelative permittivity of the inclusion. For spherical particles and at frequenciesfor which the inclusions can be considered very small, the Maxwell–Garnettformula uses the relation
α =43πR3εs
3 (εr − 1)εr + 2
, (2.169)
which yields
εeff = εs
1 + 2c εr−1εr+2
1 − c εr−1εr+2
, (2.170)

150 2 Null-Field Method
where R is the radius of the spherical particles and c is the fractional vol-ume (or the fractional concentration) of the particles, c = (4/3)πR3n0. Notethat size-dependent Maxwell–Garnett formulas incorporating finite-size ef-fects have been derived by using the Lorenz–Mie theory [52, 57], the volumeintegral equation method [129] and variational approaches [211]. However, inmicroscopic view, waves propagating in the composite do undergo multiplecorrelated scattering between the particles. When the concentration of theinclusions is high and the size of the inclusion becomes comparable to thewavelength, more complete models which takes into account the inclusionsize, statistical correlations, and multiple-scattering effects, are needed.
In this section, we consider the scattering of a vector plane wave incidenton a half-space with randomly distributed particles. Our treatment followsthe procedure described by Varadan et al. [236], Varadan and Varadan [235],and Bringi et al. [28] and concerns with the analysis of the coherent scat-tered field and in particular, of the effective propagation constants in the caseof normal incidence. This approach is based on the T -matrix method andon spherical statistics, even though the particles may be nonspherical. Lax’squasi-crystalline approximation [138] is employed to truncate the hierarchy ofequations relating the different orders of correlations between the particles,and the hole correction and the Percus–Yevick [186] approximation are usedto model the pair distribution function. The integral equation of the quasi-crystalline approximation gives rise to the generalized Lorentz–Lorenz law andthe generalized Ewald–Oseen extinction theorem. The generalized Lorentz–Lorenz law consists of a homogeneous system of equations and the resultingdispersion relation gives the effective propagation constant for the coherentwave. The generalized Ewald–Oseen extinction theorem is an inhomogeneousequation that relates the transmitted coherent field to the amplitude, polar-ization, and direction of propagation of the incident field.
Other contributions which are related to the present analysis includes thework of Foldy [69], Waterman and Truell [258], Fikioris and Waterman [65],Twerski [230, 231], Tsang and Kong [223, 224] and Tsang et al. [227]. Thecase of a plane electromagnetic wave obliquely incident on a half-space withdensely distributed particles and the computation of the incoherent field withthe distorted Born approximation have been considered Tsang and Kong [225,226].
2.9.1 T -matrix Formulation
The scattering geometry is shown in Fig. 2.13. A linearly polarized plane waveis incident on a half-space with N identical particles centered at r0l, l =1, 2, . . . ,N , and each particle is assumed to have an imaginary circumscribingspherical shell of radius R. The particles have the same orientation and wechoose αl = βl = γl = 0 for l = 1, 2, . . . ,N . The relative permittivity andrelative permeability of the homogeneous particles are εi and µi, and εs andµs are the material constants of the background medium (which also occupies

2.9 Effective Medium Model 151
ON
Op
O
O1
O l
r0l
x
y
z
ke
eβeα
ε i, µi εs, µs
Rr0p
rlp
P
rp rlr
Fig. 2.13. Geometry of identical, homogeneous particles distributed in the half-space z ≥ 0
the domain z < 0). The vector plane wave is of unit amplitude:
Ee(r) = epolejke·r ,
and propagates along the z-axis of the global coordinate system, ke = ksez.Our analysis is entirely based on the superposition T -matrix method which
expresses the scattered field Es in terms of the fields Es,l scattered from eachindividual particle l (cf. (2.147)),
Es(r) =N∑
l=1
Es,l (rl)
=N∑
l=1
∑
µ
fl,µM3µ (ksrl) + gl,µN3
µ (ksrl) . (2.171)
Taking into account that the particle coordinate systems have the same spa-tial orientation (no rotations are involved), we rewrite the expression of thescattered field coefficients sl, sl = [fl,µ, gl,µ]T, given by (2.142) as
sl = T
⎡
⎣ejksz0le +N∑
p=l
T 31 (ksrlp) sp
⎤
⎦ , (2.172)
where e is the vector of the incident field coefficients in the global coordinatesystem and T is the transition matrix of a particle.

152 2 Null-Field Method
Before going any further we make some remarks on statistically averagedwave fields. We define the probability density function of finding the firstparticle at r01, the second particle at r02, and so forth by p(r01, r02, . . . , r0N ).The probability density function can be written as [236]
p (r01, r02, . . . , r0N ) = p (r0l) p (r01, r02, . . . ,′ , . . . , r0N | r0l)
= p (r0l, r0p) p (r01, r02, . . . ,′ , . . . ,′ , . . . , r0N | r0l, r0p) ,
where p(r0l) is the probability density of finding the particle l at r0l, p(r0l, r0p)is the joint density function of the particles l and p and the ′ superscriptindicates that the term is absent. From Bayes’ rule we have
p (r0l, r0p) = p (r0l) p (r0p | r0l) ,
where p(r0p | r0l) is the conditional probability of finding the particle p atr0p if the particle l is known to be at r0l. The conditional densities with oneand two particles held fixed are related by the relation
p (r01, r02, . . . ,′ , . . . , r0N | r0l) = p (r0p | r0l)
×p (r01, r02, . . . ,′ , . . . ,′ , . . . , r0N | r0l, r0p) .
The configurational average of a statistical quantity f is defined as
Ef =∫
D
· · ·∫
D
fp (r01, r02, . . . , r0N )
×dV (r01) dV (r02) , . . . ,dV (r0N ) ,
while the conditional averages with one and two particles held fixed are
Elf =∫
D
· · ·∫
D
fp (r01, r02, . . . ,′ , . . . , r0N | r0l)
×dV (r01) dV (r02) , . . . ,′ , . . . ,dV (r0N )
and
Elpf =∫
D
· · ·∫
D
fp (r01, r02, . . . ,′ , . . . ,′ , . . . , r0N | r0l, r0p)
×dV (r01) dV (r02) , . . . ,′ , . . . ,′ , . . . ,dV (r0N ) ,
respectively.Averaging (2.172) over the positions of all particles excepting the lth, we
obtain the conditional configurational average of the scattered field coefficients
El sl = T
⎡
⎣ejksz0le +N∑
p=l
1V
∫
Dp
T 31 (ksrlp) Elp sp g (rlp) dV (r0p)
⎤
⎦ ,
(2.173)

2.9 Effective Medium Model 153
where g is the pair distribution function of a statistically homogeneousmedium,
p (r0p | r0l) =1V
g (r0p − r0l) =1V
g (rlp)
and V is the volume accessible to the particles. In our analysis we assume thatboth N and V are very large, but the number of particles per unit volume n0,
n0 = N/V,
is finite. The integration domain Dp is the half-space z0p ≥ 0, excluding aspherical volume of radius 2R centered at r0l, i.e., |r0p−r0l| ≥ 2R. The aboveequation indicates that the conditional average with one particle fixed Elslis given in terms of the conditional average with two particles fixed Elpsp.In order to close the system we use the quasi-crystalline approximation
Elp sp = Ep sp for l = p , (2.174)
which implies that there is no correlation between the lth and pth particlesother than there should be no interpenetration of any two particles.
To solve (2.173) we seek the plane wave solution
El sl = sejKsz0l , (2.175)
where s is the unknown vector of the scattered field coefficients and the ef-fective wave vector Ke is assumed to be parallel to the wave vector of theincident field, i.e., Ke = Ksez. Substituting (2.174) and (2.175) into (2.173),and taking into account that for identical particles the sum
∑Np=l can be
replaced by N − 1 and for a sufficiently large N , n0 ≈ (N − 1)/V , we obtain
sejKsz0l = T
[
ejksz0le + n0
∫
Dp
T 31 (ksrlp) g (rlp) sejKsz0pdV (r0p)
]
.
(2.176)The integral in (2.176) can be written as (excepting the unknown vector s)
Jl = J1,l + J2,l
where
J1,l =∫
Dp
T 31 (ksrlp) ejKsz0pdV (r0p) ,
J2,l =∫
Dp
T 31 (ksrlp) [g (rlp) − 1] ejKsz0pdV (r0p) ,
and the rest of our analysis concerns with the computation of the matrix termsJ1,l and J2,l.

154 2 Null-Field Method
In view of (2.144), J1,l can be expressed as
J1,l =∫
Dp
[A3
−mn,−m′n′ (ksrlp) B3−mn,−m′n′ (ksrlp)
B3−mn,−m′n′ (ksrlp) A3
−mn,−m′n′ (ksrlp)
]
ejKsz0pdV (r0p) ,
whence, taking into account the series representations for the translation co-efficients (cf. (B.72) and (B.73))
A3−mn,−m′n′(ksrlp) =
2jn′−n
√nn′(n + 1) (n′ + 1)
×∑
n′′
jn′′a1 (−m,−m′ | n′′, n, n′) u3
m′−mn′′ (ksrlp) ,
B3−mn,−m′n′(ksrlp) =
2jn′−n
√nn′(n + 1) (n′ + 1)
×∑
n′′
jn′′b1 (−m,−m′ | n′′, n, n′) u3
m′−mn′′ (ksrlp)
with (cf. (B.68) and (B.69))
a1 (−m,−m′ | n′′, n, n′) =∫ π
0
[mm′π|m|
n (β) π|m′|n′ (β) + τ |m|
n (β) τ|m′|n′ (β)
]
×P|m′−m|n′′ (cos β) sinβdβ ,
b1 (−m,−m′ | n′′, n, n′) = −∫ π
0
[mπ|m|
n (β) τ|m′|n′ (β) + m′τ |m|
n (β) π|m′|n′ (β)
]
×P|m′−m|n′′ (cos β) sin βdβ ,
we see that the calculation of J1,l requires the computation of the integral
I1mm′n′′ =
∫
Dp
ejKsz0pu3m′−mn′′ (ksrlp) dV (r0p) .
The procedure to calculate the integral I1mm′n′′ is described in Appendix C
and we have (cf. (C.2)),
I1mm′n′′ =
16πR3
(ksR)2 − (KsR)2jn
′′√
2n′′ + 12
ejKsz0lδmm′Fn′′ (Ks, ks, R)
+2π
k2s (Ks − ks)
jn′′+1
√2n′′ + 1
2ejksz0lδmm′

2.9 Effective Medium Model 155
with
Fn′′ (Ks, ks, R) = (ksR)(h
(1)n′′ (2ksR)
)′jn′′ (2KsR)
− (KsR) h(1)n′′ (2ksR) (jn′′ (2KsR))′ .
Relying on this result we find that the matrix J1,l can be decomposed intothe following manner:
J1,l = J1,RejKsz0l + J1,zejksz0l . (2.177)
The elements of the matrix J1,R,
J1,R =
[(J1,R)11−mn,−m′n′ (J1,R)12−mn,−m′n′
(J1,R)21−mn,−m′n′ (J1,R)22−mn,−m′n′
]
,
are given by
(J1,R)11−mn,−m′n′ = (J1,R)22−mn,−m′n′
=32πR3
(ksR)2 − (KsR)2jn
′−n
√nn′(n + 1) (n′ + 1)
R11mnn′δmm′ ,
(J1,R)12−mn,−m′n′ = (J1,R)21−mn,−m′n′
= − 32πR3
(ksR)2 − (KsR)2jn
′−n
√nn′(n + 1) (n′ + 1)
R12mnn′δmm′ ,
where R11mnn′ and R12
mnn′ are defined as
R11,12mnn′ =
∞∑
n′′=0
(−1)n′′√
2n′′ + 12
Fn′′ (Ks, ks, R) I1,2mnn′n′′ ,
and
I1mnn′n′′ =
∫ π
0
[m2π|m|
n (β) π|m|n′ (β) + τ |m|
n (β) τ|m|n′ (β)
]Pn′′ (cos β) sin βdβ ,
I2mnn′n′′ = m
∫ π
0
[π|m|
n (β) τ|m|n′ (β) + τ |m|
n (β) π|m|n′ (β)
]Pn′′ (cos β) sinβdβ .
(2.178)
The matrix J1,z is of the form:
J1,z =
[(J1,z)
11−mn,−m′n′ (J1,z)
12−mn,−m′n′
(J1,z)21−mn,−m′n′ (J1,z)
22−mn,−m′n′
]
,

156 2 Null-Field Method
and the matrix elements are given by
(J1,z)11−mn,−m′n′ = (J1,z)
22−mn,−m′n′
=4π
k2s (Ks − ks)
jn′−n+1
√nn′(n + 1) (n′ + 1)
S1mnn′δmm′ ,
(J1,z)12−mn,−m′n′ = (J1,z)
21−mn,−m′n′
= − 4π
k2s (Ks − ks)
jn′−n+1
√nn′(n + 1) (n′ + 1)
S2mnn′δmm′ ,
where the expressions of S1mnn′ and S2
mnn′ are similar to those of R11mnn′ and
R12mnn′ excepting the factor Fn′′ ,
S1,2mnn′ =
∞∑
n′′=0
(−1)n′′√
2n′′ + 12
I1,2mnn′n′′ .
For m = 1 we have
S11nn′ = S1
−1nn′ = snn′ , (2.179)
S21nn′ = −S2
−1nn′ = −snn′ , (2.180)
where the coefficient snn′ is given by (cf. (C.6))
snn′ =(−1)n+n′
4
√n(n + 1) (2n + 1)
√n′(n′ + 1) (2n′ + 1) . (2.181)
To derive the expression of J2,l, we need to compute the integral
I2mm′n′′ =
∫
Dp
[g (rlp) − 1] ejKsz0pu3m′−mn′′ (ksrlp) dV (r0p)
and the result is (cf. (C.3))
I2mm′n′′ = 32πR3jn′′
√2n′′ + 1
2ejKsz0lδmm′Gn′′ (Ks, ks, R) ,
where
Gn′′ (Ks, ks, R) =∫ ∞
1
[g (2Rx) − 1] h(1)n′′ (2ksRx) jn′′ (2KsRx)x2dx .
The matrix term J2,l then becomes
J2,l = J2,RejKsz0l (2.182)

2.9 Effective Medium Model 157
and the elements of the matrix J2,R,
J2,R =
[(J2,R)11−mn,−m′n′ (J2,R)12−mn,−m′n′
(J2,R)21−mn,−m′n′ (J2,R)22−mn,−m′n′
]
are given by
(J2,R)11−mn,−m′n′ = (J2,R)22−mn,−m′n′
= 64πR3 jn′−n
√nn′(n + 1) (n′ + 1)
R21mnn′δmm′ ,
(J2,R)12−mn,−m′n′ = (J2,R)21−mn,−m′n′
= −64πR3 jn′−n
√nn′(n + 1) (n′ + 1)
R22mnn′δmm′ ,
where R21mnn′ and R22
mnn′ are defined as
R21,22mnn′ =
∞∑
n′′=0
(−1)n′′√
2n′′ + 12
Gn′′ (Ks, ks, R) I1,2mnn′n′′ .
Taking into account the expressions of the integral terms I1,2mnn′n′′ (cf. (2.178))
it is apparent that
R11mnn′ = R11
−mnn′ , R12mnn′ = −R12
−mnn′ (2.183)
andR21
mnn′ = R21−mnn′ , R22
mnn′ = −R22−mnn′ . (2.184)
Substituting (2.177) and (2.182) into (2.176) gives two types of terms. Onetype of terms has a exp(jksz0l) dependence and corresponds to waves travelingwith the wave number of the incident wave, while the other type of termshas a exp(jKsz0l) dependence and corresponds to waves traveling with thewave number of the effective medium. The terms with wave number ks shouldbalance each other giving the generalized Ewald–Oseen extinction theorem,
n0J1,zs + e = 0 , (2.185)
while balancing the terms with wave number Ks gives the generalized Lorentz–Lorenz law
[I − n0T (J1,R + J2,R)] s = 0 . (2.186)
For an ensemble of particles with different orientations we proceed analo-gously. If the configurational distribution and the orientation distributionare assumed to be statistically independent, the total probability density

158 2 Null-Field Method
function can be expressed as a product of two functions, one of whichp(r01, r02, . . . , r0N ) describes the configurational distribution and the other ofwhich p(Ω1, Ω2, . . . , ΩN ) describes the distribution of particles orientations,i.e.,
p (r01, r02, . . . , r0N ;Ω1, Ω2, . . . , ΩN )= p (r01, r02, . . . , r0N ) p (Ω1, Ω2, . . . , ΩN ) ,
where Ωl is the set of Euler angles specifying the orientation of the lth particleand Ωl = (αl, βl, γl). Each of these probability density functions is normalizedto unity and the problem of computing the configurational and orientation av-erages are separated. Assuming that the particle orientations are statisticallyindependent
p (Ω1, Ω2, . . . , ΩN ) = p (Ω1) p (Ω2) ...p (ΩN ) ,
and that the individual orientation distribution is uniform
p (Ωl) =1
8π2, l = 1, 2, . . . ,N ,
we average (2.172) over all configurations for which the lth particle is heldfixed and over all orientations. We obtain
〈El sl〉 = ejksz0l
⟨T⟩
e +N∑
p=l
1V
∫
Dp
⟨TT 31 (ksrlp) Ep (sp)
⟩g (rlp) dV (r0p) ,
where 〈.〉 denotes the orientation average
〈El sl〉 =1
(8π2)N
∫
Ω
· · ·∫
Ω
[∫
D
· · ·∫
D
slp (r01, r02, . . . ,′ , . . . , r0N | r0l)
×dV (r01) dV (r02) , . . . ,′ , . . . ,dV (r0N )]dΩ1dΩ2, . . . ,dΩN ,
sl = sl(Ω1, Ω2, . . . , ΩN ), Ω is the unit sphere, dΩl = sin βldβldαldγl and⟨T⟩
=1
8π2
∫
Ω
T (αl, βl, γl) dΩl
is the orientation-averaged transition matrix. Making the assumption⟨TT 31 (ksrlp) Ep (sp)
⟩=⟨T⟩T 31 (ksrlp) 〈Ep (sp)〉 ,
which implies that Epsp depends only on Ωp [227], we obtain the generalizedLorentz–Lorenz law in terms of the orientation-averaged transition matrix〈T 〉 instead of the transition matrix T of a particle in a fixed orientation.We note that the submatrices of the orientation-averaged transition matrixare diagonal and their elements do not depend on the azimuthal indices (seeSect. 1.5).

2.9 Effective Medium Model 159
2.9.2 Generalized Lorentz–Lorenz Law
The generalized Lorentz–Lorenz law is a system of homogeneous equations forthe unknown vector s. For a nontrivial solution, the determinant must vanishgiving an equation for the effective wave number Ks. For spherical particles oraxisymmetric particles with the axis of symmetry directed along the z-axis,the transition matrix is diagonal with respect to the azimuthal indices m andm′. Because the nonvanishing incident field coefficients corresponds to m = −1and m = 1, the above matrix equations involve only these azimuthal modes.Taking into account the symmetry relations (2.25), (2.183) and (2.184), weobtain the following equation for the effective wave number Ks
det
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
I−
⎡
⎢⎢⎢⎣
T 111n′′,1n 0 T 12
1n′′,1n 00 T 11
1n′′,1n 0 −T 121n′′,1n
T 211n′′,1n 0 T 22
1n′′,1n 00 −T 21
1n′′,1n 0 T 221n′′,1n
⎤
⎥⎥⎥⎦
×
⎡
⎢⎢⎢⎣
Ann′ 0 Bnn′ 00 Ann′ 0 −Bnn′
Bnn′ 0 Ann′ 00 −Bnn′ 0 Ann′
⎤
⎥⎥⎥⎦
⎫⎪⎪⎪⎬
⎪⎪⎪⎭
= 0 ,
where
Ann′ = n0
[(J1,R)11−1n,−1n′ + (J2,R)11−1n,−1n′
],
Bnn′ = n0
[(J1,R)12−1n,−1n′ + (J2,R)12−1n,−1n′
]. (2.187)
The dimension of the problem can be reduced by using the properties ofdeterminants and the final result is
det
I−[
T 111n′′,1n T 12
1n′′,1n
T 211n′′,1n T 22
1n′′,1n
][Ann′ Bnn′
Bnn′ Ann′
]
= 0 . (2.188)
In the low frequency limit, the size of the particle is considered to be verysmall compared to the incident wavelength. It is then sufficient to take onlythe lowest-order coefficients in the fields expansions, and in this limit, theelements of the T matrix can be obtained in closed form for simple shapes.For spherical particles, we have
T 1111,11 = T 1
1 =j
45(εr − 1) x5 + O
(x7)
,
T 2211,11 = T 2
1 =2j3
εr − 1εr + 2
x3 +2j5
(εr − 1) (εr − 2)(εr + 2)2
x5 + O(x6)
,

160 2 Null-Field Method
where x = ksR is the size parameter. In (2.187) we proceed analogously andconsidering the leading terms in the expansions of the spherical Bessel andHankel functions, we obtain
A11 = a0 +12a2 ,
B11 =32a1,
where
a0 =3jc
(ksR)[(ksR)2 − (KsR)2
] +(1 − c)4
(1 + 2c)2,
a1 =3jc (KsR)
(ksR)2[(ksR)2 − (KsR)2
] ,
a2 =3jc (KsR)2
(ksR)3[(ksR)2 − (KsR)2
] .
As a result, the long-wavelength equation for the effective wave number takesthe form
(1 − T 11
11,11A11
) (1 − T 22
11,11A11
)− T 11
11,11T2211,11B
211 = 0 .
Further, neglecting T 1111,11, yields
1 − T 2211,11A11 = 0 ,
and consequently, (Ks
ks
)2
=2χ + 6jc2χ − 3jc
(2.189)
with
χ = (ksR)3[
(1 − c)4
(1 + 2c)2− 1
T 2211,11
]
.
For an ensemble of spheres of radius R and small fractional concentrations c,
χ ≈ j32
εr + 2εr − 1
,
and we obtain the dispersion relation of the Maxwell–Garnett form (2.170). Athigher frequencies, the root of the equation (2.188) is searched in the complexplane using Muller’s method. The initial guess is provided by (2.189) at lowvalues of ksR and these are used systematically to obtain convergence of rootsat increasingly higher values of ksR.

2.9 Effective Medium Model 161
2.9.3 Generalized Ewald–Oseen Extinction Theorem
After computing the singular solution Ks, the elements of the s vector canbe expressed in terms of an arbitrary constant, and this constant will bedetermined from the Ewald-Oseen extinction theorem. Certainly, this strategytacitly assumes that the system of equations (2.185) reduces to a single scalarequation and to prove this assertion we introduce the notations
s =
⎡
⎢⎢⎣
f1n′
f−1n′
g1n′
g−1n′
⎤
⎥⎥⎦ , e =
⎡
⎢⎢⎣
a1n
a−1n
b1n
b−1n
⎤
⎥⎥⎦ ,
and (cf. (2.179) and (2.180))
J1,z =
⎡
⎢⎢⎣
tnn′ 0 tnn′ 00 tnn′ 0 −tnn′
tnn′ 0 tnn′ 00 −tnn′ 0 tnn′
⎤
⎥⎥⎦ ,
where
tnn′ =4π
k2s (Ks − ks)
jn′−n+1
√nn′(n + 1) (n′ + 1)
snn′ .
Using the fact that for a vector plane wave polarized along the x-axis, theincident field coefficients are given by
a1n = −a−1n = jn−1√
2n + 1 ,
b1n = b−1n = jn−1√
2n + 1 ,
we see that the matrix equation (2.185) is solved by
f1n′ = −f−1n′ ,
g1n′ = g−1n′ ,
and the coefficients f1n′ and g1n′ are the solutions of the inhomogeneoussystem of equations
n0
∞∑
n′=0
tnn′ (f1n′ + g1n′) = −jn−1√
2n + 1 , n = 1, 2, . . .
Taking into account the expression of snn′ given by (2.181), we deduce thatthe above set of inhomogeneous equations reduces to a single scalar equation
πn0
k2s (Ks − ks)
∞∑
n′=0
(−j)n′ √2n′ + 1 (f1n′ + g1n′) = 1 (2.190)

162 2 Null-Field Method
and the assertion is proved. If the incident wave is polarized along the y-axis,we have
f1n = f−1n ,
g1n = −g−1n ,
while the scalar equation takes the form
πjn0
k2s (Ks − ks)
∞∑
n′=0
(−j)n′ √2n′ + 1 (f1n′ + g1n′) = 1 . (2.191)
Thus, the procedure is to first find the singular solution of the Lorentz–Lorenzlaw together with the dispersion relation for the effective wave number Ks,and then to determine the arbitrary constant from the scalar equations (2.190)or (2.191). After the conditional average of the scattered field coefficients hasbeen evaluated, the coherent reflected field can be computed by taking theconfigurational average of (2.171), i.e.,
E Es(r) =∫
...
∫Es(r)p (r01, r02, . . . , r0N )
×dV (r01) dV (r02) , . . . ,dV (r0N )
=N∑
l=1
∫
Dl
El Es,l (rl) p (r0l) dV (r0l)
= n0
∫
Dl
El Es,l (rl)dV (r0l) ,
where the integration domain Dl is the half-space z0l ≥ 0 and p(r0l) = 1/V .We obtain
E Es(r) = − πn0
k2s (Ks + ks)
e−jksez·r∞∑
n=1
jn√
2n + 1 (f1n − g1n)ex
for an incident vector plane wave polarized along the x-axis, and
E Es(r) = − πjn0
k2s (Ks + ks)
e−jksez·r∞∑
n=1
jn√
2n + 1 (f1n − g1n) ey
for an incident vector plane wave polarized along the y-axis. The above rela-tions show that the coherent reflected field is in the backward direction andcontains no depolarization.
2.9.4 Pair Distribution Functions
We conclude this section with some remarks on pair distribution functionsthat have been used in multiple scattering problems. For the hole-correction

2.9 Effective Medium Model 163
approximation, the pair distribution function is given by g(r) = 0, for r <2R, and g(r) = 1, for r ≥ 2R. The hole-correction approximation assumesthat the particles do not interpenetrate each other and considers uniformdistribution outside the hole. When the fractional volume of the particlesc is appreciable, the hole-correction approximation is not correct and thePercus–Yevick pair function is frequently employed. This pair distributionfunction is the solution of the Ornstein–Zernike equation for the total anddirect correlation functions of two particles h(r) and d(r), respectively, [228].In general, the total correlation function
h(r) = g(r) − 1 ,
can be expressed in terms of its Fourier transform H as
h(r) =1
(2π)3
∫ ∞
−∞H (p) ejp·rdV (p) .
Passing to spherical coordinates, using the spherical wave expansion of the“plane waves” exp (jp·r) and assuming spherical symmetry for H, i.e., H(p) =H(p), we obtain
h (r) =1
2π2
∫ ∞
0
H(p)sin (pr)
prp2dp
and further
h (2Rx) =1
16πR3
∫ ∞
0
H( u
2R
) sin (ux)ux
u2du , (2.192)
where
x =r
2R, u = 2Rp .
The Ornstein–Zernike equation with Percus–Yevick approximation has aclosed-form solution for the case of a hard-sphere potential. In the Fouriertransform domain, the solution to the Ornstein–Zernike equation is
H(p) =D(p)
1 − n0D(p),
where the Fourier transform D of the direct correlation function is given by
D(p) =24c
n0
[α + β + δ
u2cos u − α + 2β + 4δ
u3sinu
− 2 (β + 6δ)u4
cos u +2β
u4+
24δ
u5sinu +
24δ
u6(cos u − 1)
]
with
α =(1 + 2c)2
(1 − c)4, β = −6c
(1 + c/2)2
(1 − c)4, δ =
12αc .
Thus, the Fourier transform H(p) can be calculated readily while the totalcorrelation function is obtained from (2.192).

164 2 Null-Field Method
2.10 Particle on or near an Infinite Surface
Computation of light scattering from particles deposited upon a surface is ofgreat interest in the simulation, development and calibration of surface scan-ners for wafer inspection [214]. More recent applications include laser clean-ing [149], scanning near-field optical microscopy (SNOM) [114] and plasmonresonances effects in surface-enhanced Raman spectroscopy (SERS) [30]. Sev-eral studies have addressed this scattering problem using different methods.Simplified theoretical models have been developed on the basis of Lorenz-Mietheory and Fresnel surface reflection [15,240–242]. A coupled-dipole algorithmhas been employed by Taubenblatt and Tran [221] and Nebeker et al. [178]using a three dimensional array of dipoles to model a feature shape and theSommerfeld integrals to describe the interaction between a dipole and a sur-face. The theoretical aspects of the coupled-dipole model has been fully out-lined by Schmehl [206]. A model based on the discrete source method hasbeen given by Eremin and Orlov [59,60], whereas the transmission conditionsat the interface are satisfied analytically and the fields of discrete sources arederived by using the Green tensor for a plane surface. More details on com-putational methods and experimental results can be found in a book editedby Moreno and Gonzales [173].
Similar scattering problems have been solved by Kristensson and Strom[125], and Hackmann and Sammelmann [90] in the framework of the null-fieldmethod. Acoustic scattering from a buried inhomogeneity has been consideredby Kristensson and Strom on the assumption that the free-field T -matrix ofthe particle modifies the free-field T -operator of the arbitrary surface. Byprojecting the free-field T -operator of the surface onto a spherical basis, aninfinite system of linear equations for the free-field T -matrix of the particlehas been derived. In contrast, Hackmann and Sammelmann assumed thatthe free-field T -operator of the surface modifies the free-field T -matrix ofthe particle, and in this case, the free-field T -matrix of the particle has beenprojected onto a rectangular basis and an integral equation for the spectralamplitudes of the fields has been obtained.
2.10.1 Particle on or near a Plane Surface
In this section we extend the results of Bobbert and Vlieger [15] to the caseof axisymmetric particles situated on or near a plane surface. The scatteringproblem is a multiple particles problem and the solution method is the separa-tion of variables technique. To model the scattering problem in the frameworkof the separation of variables technique one must address how the radiationinteracts with the particle. The incident field strikes the particle either di-rectly or after interacting with the surface, while the fields emanating fromthe particle may also reflect off the surface and interact with the particle again.The transition matrix relating the incident and scattered field coefficients iscomputed in the framework of the null-field method and the reflection matrix

2.10 Particle on or near an Infinite Surface 165
O x
z
ke
β0z0
Σ
mrs
mr
Fig. 2.14. Geometry of an axisymmetric particle situated near a plane surface. Theexternal excitation is a vector plane wave propagating in the ambient medium
characterizing the reflection of the scattered field by the surface is computedby using the integral representation for the vector spherical wave functions.
The geometry of the scattering problem is shown in Fig. 2.14. An axisym-metric particle is situated in the neighborhood of a plane surface Σ, so thatits axis of symmetry is normal to the plane surface. The z-axis of the parti-cle coordinate system Oxyz is directed along the axis of symmetry and theorigin O is situated at the distance z0 below the plane surface. The incidentradiation is a linearly polarized vector plane wave propagating in the ambientmedium (the medium below the surface Σ)
Ee(r) = (Ee0,βeβ + Ee0,αeα) ejke·r , (2.193)
and the wave vector ke, ke = ksek, is assumed to be in the xz-plane and toenclose the angle β0 with the z-axis.
The incident wave strikes the particle either directly or after interactingwith the surface. The direct and the reflected incident fields are expanded interms of regular vector spherical wave functions
Ee(r) =∞∑
n1=1
n1∑
m=−n1
a0mn1
M1mn1
(ksr) + b0mn1
N1mn1
(ksr) (2.194)
and
ERe (r) =
∞∑
n1=1
n1∑
m=−n1
aRmn1
M1mn1
(ksr) + bRmn1
N1mn1
(ksr) , (2.195)

166 2 Null-Field Method
respectively, and we define the total expansion coefficients amn1 and bmn1 bythe relations
amn1 = a0mn1
+ aRmn1
,
bmn1 = b0mn1
+ bRmn1
.
The coefficients a0mn1
and b0mn1
are the expansion coefficients of a vector planewave traveling in the (β0, 0) direction,
a0mn1
= − 4jn1
√2n1 (n1 + 1)
[jmπ|m|
n1(β0)Ee0,β + τ |m|
n1(β0)Ee0,α
],
b0mn1
= − 4jn1+1
√2n1 (n1 + 1)
[τ |m|n1
(β0)Ee0,β − jmπ|m|n1
(β0)Ee0,α
],
while the coefficients aRmn1
and bRmn1
are the expansion coefficients of a vectorplane wave traveling in the (π−β0, 0) direction. The part of the incident fieldthat reflects off the surface will undergo a Fresnel reflection and it will beout of phase by an amount of exp(2jksz0 cos β0). This phase factor arises fromthe phase difference between the plane wave and its reflected wave in O. Theresulting expressions for aR
mn1and bR
mn1are
aRmn1
= − 4jn1
√2n1 (n1 + 1)
[jmπ|m|
n1(π − β0)ER
e0,β + τ |m|n1
(π − β0)ERe0,α
],
bRmn1
= − 4jn1+1
√2n1 (n1 + 1)
[τ |m|n1
(π − β0)ERe0,β − jmπ|m|
n1(π − β0)ER
e0,α
],
where
ERe0,β = r‖(β0)e2jksz0 cos β0Ee0,β ,
ERe0,α = r⊥(β0)e2jksz0 cos β0Ee0,α ,
with r‖(β0) and r⊥(β0) being the Fresnel reflection coefficients for parallel andperpendicular polarizations, respectively. The Fresnel reflection coefficientsare given by
r‖(β0) =mrs cos β0 − cos β
mrs cos β0 + cos β,
r⊥(β0) =cos β0 − mrs cos β
cos β0 + mrs cos β,
where mrs is the relative refractive index of the substrate with respect to theambient medium and β is the angle of refraction (Fig. 2.15). The angles ofincidence and refraction are related to each other by Snell’s law

2.10 Particle on or near an Infinite Surface 167
O x
z
k e
β0
Σ
β0 keR
k eT
Eeβ ER
eβ
ETeββ
mrs
z0
Fig. 2.15. Reflection and refraction of a vector plane wave (propagating in theambient medium) at the interface Σ
sin β =1
mrssin β0 ,
cos β = ±√
1 − sin2 β
and for real values of mrs, the sign of the square root is plus, while for complexvalues of mrs, the sign of the square root is chosen such that Immrs cos β > 0.This choice guarantees that the amplitude of the refracted wave propagatingin the positive direction of the z-axis would tend to zero with increasing thedistance z.
The scattered field is expanded in terms of radiating vector spherical wavefunctions
Es(r) =∞∑
n=1
n∑
m=−n
fmnM3mn(ksr) + gmnN3
mn(ksr) (2.196)
and the rest of our analysis concerns with the calculation of the expansion co-efficients fmn and gmn. In addition to the fields described by (2.194)–(2.196), afourth field exists in the ambient medium. This field is a result of the scatteredfield reflecting off the surface and striking the particle. It can be expressed as
ERs (r) =
∞∑
n=1
n∑
m=−n
fmnM3,Rmn(ksr) + gmnN3,R
mn(ksr) , (2.197)
where M3,Rmn(ksr) and N3,R
mn(ksr) are the radiating vector spherical wave func-tions reflected by the surface. Accordingly to Videen [240–242], the field ER
s
will be designated as the interacting field. For r inside a sphere enclosed inthe particle and a given azimuthal mode m, we anticipate an expansion of thereflected vector spherical wave functions of the form

168 2 Null-Field Method
(M3,R
mn(ksr)N3,R
mn(ksr)
)
=∞∑
n1=1
(αmnn1
γmnn1
)
M1mn1
(ksr) +
(βmnn1
δmnn1
)
N1mn1
(ksr) .
(2.198)
Inserting (2.198) into (2.197), we derive a series representation for the inter-acting field in terms of regular vector spherical wave functions
ERs (r) =
∞∑
n1=1
n1∑
m=−n1
fRmn1
M1mn1
(ksr) + gRmn1
N1mn1
(ksr)] , (2.199)
where(
fRmn1
gRmn1
)
=∞∑
n=1
(αmnn1
βmnn1
)
fmn +
(γmnn1
δmnn1
)
gmn . (2.200)
In the null-field method, the scattered field coefficients are related to theexpansion coefficients of the fields striking the particle by the transition matrixT . For an axisymmetric particle, the equations become uncoupled, permittinga separate solution for each azimuthal mode. Thus, for a fixed azimuthalmode m, we truncate the expansions given by (2.194)–(2.196) and (2.199),and derive the following matrix equation:
[fmn
gmn
]= [Tmn,mn1 ]
([amn1
bmn1
]+[
fRmn1
gRmn1
]), (2.201)
where n and n1 range from 1 to Nrank, and m ranges from −Mrank to Mrank,with Nrank and Mrank being the maximum expansion and azimuthal orders,respectively. The expansion coefficients of the interacting field are related tothe scattered field coefficients by a so called reflection matrix:
[fR
mn1
gRmn1
]= [Amn1n]
[fmn
gmn
], (2.202)
where, in view of (2.200),
[Amn1n] =[
αmnn1 γmnn1
βmnn1 δmnn1
].
Now it is apparent that the scattered field coefficients fmn and gmn can beobtained by combining the matrix equations (2.201) and (2.202), and theresult is [270]
(I − [Tmn,mn1 ] [Amn1n])[
fmn
gmn
]= [Tmn,mn1 ]
[amn1
bmn1
]. (2.203)
To derive the expression of the reflection matrix we use the integral represen-tations for the radiating vector spherical wave functions

2.10 Particle on or near an Infinite Surface 169
(M3
mn(ksr)N3
mn(ksr)
)
= − 12πjn+1
1√
2n(n + 1)
∫ 2π
0
∫ π/2−j∞
0
[(mπ
|m|n (β)
τ|m|n (β)
)
eβ
+j
(τ|m|n (β)
mπ|m|n (β)
)
eα
]
ejmαejk(β,α)·r sinβdβ dα , (2.204)
where (ks, β, α) are the spherical coordinates of the wave vector k, and(ek,eβ ,eα) are the spherical unit vectors of k. Each reflected plane wavein (2.204) will contain a Fresnel reflection term and a phase term equiva-lent to exp(2jksz0 cos β). The reflected vector spherical wave functions can beexpressed as(
M3,Rmn(ksr)
N3,Rmn(ksr)
)
= − 12πjn+1
1√
2n(n + 1)
∫ 2π
0
∫ π/2−j∞
0
[(mπ
|m|n (β)
τ|m|n (β)
)
r‖(β)eβR
+ j
(τ|m|n (β)
mπ|m|n (β)
)
r⊥(β)eαR
]
ejmαe2jksz0 cos βejkR(βR,αR)·r
× sin β dβ dα ,
where βR = π − β, αR = α, (ks, βR, αR) are the spherical coordinates of thereflected wave vector kR, and (ekR,eβR,eαR) are the spherical unit vectorsof kR. For r inside a sphere enclosed in the particle, we expand each planewave in terms of regular vector spherical wave functions
(eβR
eαR
)
ejkR·r = −∞∑
n1=1
n1∑
m1=−n1
4jn1
√2n1 (n1 + 1)
[(jm1π
|m1|n1 (π − β)
τ|m1|n1 (π − β)
)
× M1m1n1
(ksr) +
⎛
⎝jτ |m1|
n1 (π − β)
m1π|m1|n1 (π − β)
⎞
⎠N1m1n1
(ksr)
⎤
⎦ e−jm1α
and obtain the following expressions for the elements of the reflection matrix:
αmnn1 =2jn1−n
√nn1(n + 1)(n1 + 1)
∫ π/2−j∞
0
[m2π|m|
n (β)π|m|n1
(π − β)r‖(β)
+ τ |m|n (β)τ |m|
n1(π − β)r⊥(β)
]e2jksz0 cos β sinβ dβ , (2.205)
βmnn1 =2jn1−n
√nn1(n + 1)(n1 + 1)
∫ π/2−j∞
0
m[π|m|
n (β)τ |m|n1
(π − β)r‖(β)
+ τ |m|n (β)π|m|
n1(π − β)r⊥(β)
]e2jksz0 cos β sin β dβ , (2.206)

170 2 Null-Field Method
γmnn1 =2jn1−n
√nn1(n + 1)(n1 + 1)
∫ π/2−j∞
0
m[τ |m|n (β)π|m|
n1(π − β)r‖(β)
+ π|m|n (β)τ |m|
n1(π − β)r⊥(β)
]e2jksz0 cos β sinβ dβ , (2.207)
δmnn1 =2jn1−n
√nn1(n + 1)(n1 + 1)
∫ π/2−j∞
0
[τ |m|n (β)τ |m|
n1(π − β)r‖(β)
+ m2π|m|n (β)π|m|
n1(π − β)r⊥(β)
]e2jksz0 cos β sin β dβ , (2.208)
An approximate expression for the reflection matrix can be derived if weassume that the interacting radiation strikes the surface at normal incidence.Assuming r(0) = r⊥(β) = −r‖(β), changing the variable from β to βR = π−β,and using the relations
π|m|n (π − βR) = (−1)n−|m|π|m|
n (βR) ,
τ |m|n (π − βR) = (−1)n−|m|+1τ |m|
n (βR) ,
yields the following simplified integral representations for the reflected vectorspherical wave functions:(
M3,Rmn(ksr)
N3,Rmn(ksr)
)
= − (−1)n−|m|r(0)2πjn+1
1√
2n(n + 1)
×∫ 2π
0
∫ π
π/2+j∞
[(−mπ
|m|n (βR)
τ|m|n (βR)
)
eβR+ j
(−τ
|m|n (βR)
mπ|m|n (βR)
)
eαR
]
×ejmαRe−2jksz0 cos βRejkR(βR,αR)·r sin βR dβR dαR .
To compute M3,Rmn and N3,R
mn we introduce the image coordinate systemO′x′y′z′ by shifting the original coordinate system a distance 2z0 along thepositive z-axis. The geometry of the image coordinate system is shown inFig. 2.16. Taking into account that kR · r′ = kR · r − 2ksz0 cos βR, wherer′ = (x′, y′, z′), we identify in the resulting equation the integral representa-tions for the radiating vector spherical wave functions in the half-space z < 0:
(M3,R
mn(ksr)N3,R
mn(ksr)
)
= (−1)n−|m|r(0)
(−M3
mn(ksr′)
N3mn(ksr
′)
)
.
In this case the interacting field is the image of the scattered field and theexpansion (2.198) can be derived by using the addition theorem for vectorspherical wave functions. The elements of the reflection matrix are the trans-lation coefficients, and as a result, the amount of computer time required tosolve the scattering problem is significantly reduced. In this regard it should

2.10 Particle on or near an Infinite Surface 171
O
x
z
Σ
z0
x
z
O
z0r
r
P
Fig. 2.16. Image coordinate system
be mentioned that the formalism using the approximate expression for thereflection matrix has been employed by Videen [240–242].
In most practical situations we are interested in the analysis of the scat-tered field in the far-field region and below the plane surface, i.e., for θ > π/2.In this region we have two contributions to the scattered field: the directelectric far-field pattern Es∞(θ, ϕ),
Es∞(θ, ϕ) =1ks
∞∑
n=1
n∑
m=−n
(−j)n+1 [fmnmmn(θ, ϕ) + jgmnnmn(θ, ϕ)] (2.209)
and the interacting electric far-field pattern ERs∞(θ, ϕ),
ERs∞(θ, ϕ) =
1ks
∞∑
n=1
n∑
m=−n
(−j)n+1 [fmnmR
mn(θ, ϕ) + jgmnnRmn(θ, ϕ)
],
(2.210)
where mmn and nmn are the vector spherical harmonics, and mRmn and nR
mn
are the reflected vector spherical harmonics,
mRmn(θ, ϕ) =
1√
2n(n + 1)e−2jksz0 cos θ
×[jmπ|m|
n (π − θ)r‖(π − θ)eθ − τ |m|n (π − θ)r⊥(π − θ)eϕ
]ejmϕ ,
nRmn(θ, ϕ) =
1√
2n(n + 1)e−2jksz0 cos θ
×[τ |m|n (π − θ)r‖(π − θ)eθ + jmπ|m|
n (π − θ) r⊥(π − θ)eϕ
]ejmϕ .

172 2 Null-Field Method
Thus, the solution of the scattering problem in the framework of the separationof variables method involves the following steps:
1. Calculation of the T matrix relating the expansion coefficients of the fieldsstriking the particle to the scattered field coefficients.
2. Calculation of the reflection matrix A characterizing the reflection of vec-tor spherical wave functions by the surface.
3. Computation of an approximate solution by solving the matrix equation(2.203).
4. Computation of the far-field pattern by using (2.209) and (2.210).
In practice, we must compute the integrals in (2.205)–(2.208), which are ofthe form
I =∫ π/2−j∞
0
f (cos β) e2jq cos β sin βdβ .
Changing variables from β to x = −2jq(cos β − 1), we have
I =e2jq
2jq
∫ ∞
0
f
(1 − x
2jq
)e−xdx
and integrals of this type can be computed efficiently by using the Laguerrepolynomials [15].
Scanning near-field optical microscopy [202,203] requires a rigorous analy-sis of the evanescent scattering by small particles near the surface of a dielec-tric prism [31, 142, 199, 252]. Scattering of evanescent waves can be analyzedby extending our formalism to the case of an incident plane wave propagatingin the substrate (Fig. 2.17).
For the incident vector plane wave given by (2.193), the transmitted (orthe refracted) vector plane wave is
EeT(r) =(ET
e0,βeβT + ETe0,αeαT
)ejkeT ·r ,
where
ETe0,β = t‖(β0)ejksz0(cos β−mrs cos β0)Ee0,β ,
ETe0,α = t⊥(β0)ejksz0(cos β−mrs cos β0)Ee0,α ,
β0 is the incident angle and (ekT,eβT,eαT) are the spherical unit vectors ofthe transmitted wave vector keT. The Fresnel transmission coefficients aregiven by
t‖(β0) =2mrs cos β0
cos β0 + mrs cos β,
t⊥(β0) =2mrs cos β0
mrs cos β0 + cos β,

2.10 Particle on or near an Infinite Surface 173
O x
z
k e
β 0
z 0
Σ
mrs
mr
k eTβ
Fig. 2.17. Geometry of an axisymmetric particle situated near a plane surface. Theexternal excitation is a vector plane wave propagating in the substrate
while the angle of refraction is computed by using Snell’s law:
sin β = mrs sin β0 ,
cos β = ±√
1 − sin2 β .
Evanescent waves appear for real mrs and incident angles β0 > β0c, whereβ0c = arcsin(1/mrs). In this case, sin β > 1 and cosβ is purely imaginary. Fornegative values of z, we have
exp (jkeT · r) = exp (−jksz cos β + jksx sin β) = exp (jks |z| cos β + jksx sin β) ,
and we choose the sign of the square root such that Imcos β > 0. Thischoice guarantees that the amplitude of the refracted wave propagating in thenegative direction of the z-axis decreases with increasing the distance |z|. Theexpansion coefficients of the transmitted wave are
aTmn1
= − 4jn1
√2n1 (n1 + 1)
[jmπ|m|
n1(π − β)ET
e0,β + τ |m|n1
(π − β)ETe0,α
],
bTmn1
= − 4jn1+1
√2n1 (n1 + 1)
[τ |m|n1
(π − β)ETe0,β − jmπ|m|
n1(π − β)ET
e0,α
],
and we see that our previous analysis remains unchanged if we replace thetotal expansion coefficients amn1 and bmn1 , by the expansion coefficients ofthe transmitted wave aT
mn1and bT
mn1.
2.10.2 Particle on or near an Arbitrary Surface
In the precedent analysis, we considered scattering by a particle situatednear a plane surface. The scattering problem of a particle situated in the

174 2 Null-Field Method
neighborhood of an arbitrary infinite surface can be solved by using theT -operator formalism. Specifically, we are interested to compute the vectorspherical wave expansions of the reflected fields ER
e , M3,Rmn and N3,R
mn in thecase of an infinite surface. For this purpose, we consider the scattering prob-lem of an infinite surface illuminated by an arbitrary incident field and followthe analysis of Kristensson [124].
We briefly recall the definitions and the basic properties of scalar andvector plane waves [14]. The scalar plane wave is defined by
χ(r,K±) = exp(jK± · r) = exp[j (Kxx + Kyy ± Kzz)] ,
where
K± = Kxex + Kyey ± Kzez .
Using the notation kT =√
K2x + K2
y , Kz can be expressed as Kz =√
k2 − k2T,
where the square root is always chosen to have a positive imaginary part. Forreal k, Kz is given by Kz =
√k2 − k2
T, if kT ≤ k, and by Kz =j√
k2T − k2 if
kT > k. The case kT ≤ k corresponds to harmonic propagating waves, whilethe case kT > k corresponds to evanescent waves. The vector plane wavesM(r,K±) and N(r,K±) are defined in terms of scalar plane wave as
M (r,K±) =1kT
∇× [ezχ (r,K±)] = jKT
kTχ (r,K±) ,
N (r,K±) =1k∇× M (r,K±) = −
(K±k
× KT
kT
)χ (r,K±) ,
where KT is the transverse component of the wave vector K± and is given by
KT = K± × ez = Kyex − Kxey .
The orthogonality relations∫
Σ
M (r,K±) · M(−r,K ′
±)dxdy = 4π2e±j(Kz−K′
z)zδ(Kx − K ′
x,Ky − K ′y
)
∫
Σ
N (r,K±) · N(−r,K ′
±)
dxdy = 4π2 K± · K ′±
kk′ e±j(Kz−K′z)z
×δ(Kx − K ′
x,Ky − K ′y
),
∫
Σ
M (r,K±) · N(−r,K ′
±)
dxdy =∫
Σ
N (r,K±) · M(−r,K ′
±)dxdy=0,
hold on a plane z = const, where
M (−r,K±) =1kT
∇× [ezχ (−r,K±)] = −jKT
kTχ (−r,K±) ,
N (−r,K±) =1k∇× M (−r,K±) = −
(K±k
× KT
kT
)χ (−r,K±) .

2.10 Particle on or near an Infinite Surface 175
O x
z
keβ0
mrs
Sz = z >
z = z<
Di
Ds
Fig. 2.18. Geometry of an infinite surface
Alternative expressions for the vector plane waves are
M (r,K±) = −jeαχ (r,K±) ,
N (r,K±) = −eβχ (r,K±) , (2.211)
and
M (−r,K±) = jeαχ (−r,K±) ,
N (−r,K±) = −eβχ (−r,K±) , (2.212)
where (ek,eβ ,eα) are the spherical unit vectors of the wave vector K±.We consider now the scattering geometry depicted in Fig. 2.18. The inci-
dent field Ee is a vector plane wave or any radiating vector spherical wavefunctions. To solve the scattering problem in the framework of the T -operatormethod we apply the Huygens principle to a surface consisting of a finite partof S and a lower half-sphere. Letting the radius of the sphere tend to infinityand assuming that the integrals over S exist and the integrals over the lowerhalf-sphere vanish (radiation conditions), we obtain
E(r)0
= Ee(r)+
∫
S
[n (r′) × Ei (r′)] ·
[∇′ × G (ks, r
′, r)]
(2.213)
+ [n (r′) × (∇′ × Ei (r′))] · G (ks, r′, r)
dS (r′) ,
r ∈ Ds
r ∈ Di
,
where E(r) = Ee(r) + Es(r) is the total field in the domain Ds andG(ks, r
′, r) is the free space dyadic Green function of wave number ks. Thedyadic Green function can be expanded in terms of vector plane waves,[14,124]

176 2 Null-Field Method
G(ks, r′, r) =
jks
8π2
∫
R2
[M(−r′,Ks
+
)M(r,Ks
+
)
+ N(−r′,Ks
+
)N(r,Ks
+
)] dKsx dKs
y
ksKsz
for z > z′, and
G(ks, r′, r) =
jks
8π2
∫
R2
[M(−r′,Ks
−)
M(r,Ks
−)
+ N(−r′,Ks
−)
N(r,Ks
−)] dKs
x dKsy
ksKsz
for z < z′, where the superscript s indicates that the vector plane wavescorrespond to the domain Ds.
The incident field is a prescribed field, whose sources are assumed to besituated in Ds. This means that in any case, the sources are below the fictitiousplane z = z> and we can represent the external excitation as an integral overup-going vector plane waves
Ee(r) =∫
R2
[A(Ks
+)M(r,Ks+) + B(Ks
+)N(r,Ks+)] dKs
x dKsy
ksKsz
.
For r ∈ Di and z > z>, we use the plane wave expansion of the Green dyadand the orthogonality properties of the vector plane waves to obtain
A(Ks
+
)= − jk2
s
8π2
∫
S
[n(r′) × Ei(r′)] · N
(−r′,Ks
+
)(2.214)
+1ks
[n (r′) × (∇′ × Ei (r′))] · M(−r′,Ks
+
)
dS (r′) ,
B(Ks
+
)= − jk2
s
8π2
∫
S
[n(r′) × Ei(r′)] · M
(−r′,Ks
+
)(2.215)
+1ks
[n (r′) × (∇′ × Ei (r′))] · N(−r′,Ks
+
)
dS (r′) .
Taking into account that the tangential vector plane waves n×M(·,K i+) and
n×N(·,K i+), form a complete system of vector function on S, we represent
the surface fields n × Ei and n × (∇× Ei) as integrals over up-going vectorplane waves, i.e.,
n (r′) × Ei (r′) =∫
R2
[C(K i
+
)c(K i
+
)n (r′) × M
(r′,K i
+
)(2.216)
+ D(K i
+
)d(K i
+
)n (r′) × N
(r′,K i
+
)]dK i
x dK iy

2.10 Particle on or near an Infinite Surface 177
and
n (r′) × [∇′ × Ei (r′)] = ki
∫
R2
[C(K i
+
)c(K i
+
)n (r′) × N
(r′,K i
+
)
+ D(K i
+
)d(K i
+
)n (r′) × M
(r′,K i
+
)]dK i
x dK iy ,
(2.217)
respectively. The plane wave transmission coefficients in (2.216) and (2.217)are given by
c(K i
+
)=
2Ksz
Ksz + K i
z
e−j(Kiz−Ks
z)z′,
d(Ki
+
)=
2mrsKsz
m2rsK
sz + K i
z
e−j(Kiz−Ks
z)z′, (2.218)
where mrs = ki/ks is the relative refractive index of the domain Di with respectto the ambient medium, and the wave vectors Ks
+ and K i+ (in (2.218)) are
related to each other by Snell’s law
kT = kTs = kTi =√
(Ksx)2 + (Ks
y)2 =√
(K ix)2 + (K i
y)2 .
Inserting (2.216) and (2.217) into (2.214) and (2.215) yields[
A(Ks
+
)
B(Ks
+
)
]
=∫
R2Q31(Ks
+,K i+
)[
C(K i
+
)
D(K i
+
)
]
dK ix dK i
y , (2.219)
where
Q31(Ks
+,K i+
)=
[(Q31(Ks
+,K i+
))11 (Q31(Ks
+,K i+
))12
(Q31(Ks
+,K i+
))21 (Q31(Ks
+,K i+
))22
]
and
(Q31(Ks
+,K i+
))11= − jk2
s
8π2
∫
S
c(K i+)[
n (r′) × M(r′,K i
+
)]· N(−r′,Ks
+)
+ mrs
[n (r′) × N
(r′,K i
+
)]· M(−r′,Ks
+)
dS (r′) ,
(Q31(Ks
+,K i+
))12= − jk2
s
8π2
∫
S
d(K i+)[
n (r′) × N(r′,K i
+
)]· N(−r′,Ks
+)
+ mrs
[n (r′) × M
(r′,K i
+
)]· M(−r′,Ks
+)
dS (r′) ,
(Q31(Ks
+,K i+
))21= − jk2
s
8π2
∫
S
c(K i+)[
n (r′)×M(r′,K i
+
)]· M(−r′,Ks
+)
+ mrs
[n (r′) × N
(r′,K i
+
)]· N(−r′,Ks
+)
dS (r′) ,

178 2 Null-Field Method
(Q31(Ks
+,K i+
))22= − jk2
s
8π2
∫
S
d(K i+)[
n (r′) × N(r′,K i
+
)]· M(−r′,Ks
+)
+ mrs
[n (r′) × M
(r′,K i
+
)]· N(−r′,Ks
+)
dS (r′) .
We note that (Q31)αβ , α, β = 1, 2, are not functions in the usual sense andrelations involving Q31 should be understood in a distributional sense. For aplane surface we have
(Q31(Ks
+,K i+
))11plane
=(Q31(Ks
+,K i+
))22plane
= ksKszδ(K i
x − Ksx,K i
y − Ksy
),
(Q31(Ks
+,K i+
))11plane
=(Q31(Ks
+,Ki+
))22plane
= 0
and the system of integral equations (2.219) simplifies to a system of algebraicequations
A(Ks
+
)= ksK
szC(K i
+
),
B(Ks
+
)= ksK
szD(K i
+
).
For solving the general case of an arbitrary surface, one has to invert a systemof two-dimensional integral transforms and this is a formidable analytic andnumerical problem. We can formally assume that the inverse transform existsand represent the solution as[
C(K i
+
)
D(K i
+
)
]
=∫
R2
[Q31(Ks
+,K i+
)]−1
[A(Ks
+
)
B(Ks
+
)
]
dKsx dKs
y . (2.220)
To compute the scattered field we consider (2.213) for r ∈ Ds, expand thefree space dyadic Green function in terms of vector plane waves by assumingz < z<, and obtain
Es(r) =∫
R2
[F (Ks
−)M(r,Ks−) + G(Ks
−)N(r,Ks−)] dKs
x dKsy
ksKsz
, (2.221)
where the amplitudes F (Ks−) and G(Ks
−) are given by
F(Ks
−)
=jk2
s
8π2
∫
S
[n(r′) × Ei(r′)] · N
(−r′,Ks
−)
+1ks
[n (r′) × (∇′ × Ei (r′))] · M(−r′,Ks
−)
dS (r′) ,
G(Ks
−)
=jk2
s
8π2
∫
S
[n(r′) × Ei(r′)] · M
(−r′,Ks
−)
+1ks
[n (r′) × (∇′ × Ei (r′))] · N(−r′,Ks
−)
dS (r′) .

2.10 Particle on or near an Infinite Surface 179
Inserting the integral representations for n × Ei and n × (∇ × Ei) into theabove equations yields a relation between the amplitudes of the field in thedomain Ds, F (Ks
−) and G(Ks−), and the amplitudes of the field in the domain
Di, C(K i+) and D(K i
+):[
F(Ks
−)
G(Ks
−)
]
=∫
R2Q11(Ks
−,K i+
)[
C(K i
+
)
D(K i
+
)
]
dK ix dK i
y , (2.222)
where
Q11(Ks
−,K i+
)=
[(Q11(Ks
−,K i+
))11 (Q11(Ks
−,K i+
))12
(Q11(Ks
−,K i+
))21 (Q11(Ks
−,K i+
))22
]
and
(Q11(Ks
−,K i+
))11=
jk2s
8π2
∫
S
c(K i+)[
n (r′) × M(r′,K i
+
)]· N(−r′,Ks
−)
+ mrs
[n (r′) × N
(r′,K i
+
)]· M(−r′,Ks
−)
dS (r′) ,
(Q11(Ks
−,K i+
))12=
jk2s
8π2
∫
S
d(K i+)[
n (r′) × N(r′,K i
+
)]· N(−r′,Ks
−)
+ mrs
[n (r′) × M
(r′,K i
+
)]· M(−r′,Ks
−)
dS (r′) ,
(Q11(Ks
−,K i+
))21=
jk2s
8π2
∫
S
c(K i+)[
n (r′) × M(r′,K i
+
)]· M(−r′,Ks
−)
+ mrs
[n (r′) × N
(r′,K i
+
)]· N(−r′,Ks
−)
dS (r′) ,
(Q11(Ks
−,K i+
))22=
jk2s
8π2
∫
S
d(K i+)[
n (r′) × N(r′,K i
+
)]· M(−r′,Ks
−)
+ mrs
[n (r′) × M
(r′,K i
+
)]· N(−r′,Ks
−)
dS (r′) .
Combining (2.220) and (2.222) we are led to[
F(Ks
−)
G(Ks
−)
]
=∫
R2
∫
R2Q11(Ks
−,K i+
) [Q31(K
s
+,K i+
)]−1
×
⎡
⎣A(K
s
+
)
B(K
s
+
)
⎤
⎦dKsx dKs
y dK ix dK i
y
=∫
R2T(Ks
−, Ks
+
)⎡
⎣A(K
s
+
)
B(K
s
+
)
⎤
⎦dKsx dKs
y ,
where T (Ks−, K
s
+) is the T -operator of the infinite surface and

180 2 Null-Field Method
T(Ks
−, Ks
+
)=∫
R2Q11(Ks
−,K i+
) [Q31(K
s
+,K i+
)]−1
dK ix dK i
y .
(2.223)For a plane surface, the above relations simplify considerably and we have
(Q11(Ks
−,K i+
))11plane
= ksKsza(Ks
−)δ(K i
x − Ksx,K i
y − Ksy
),
(Q11(Ks
−,K i+
))22plane
= ksKszb(Ks
−)δ(K i
x − Ksx,K i
y − Ksy
),
and(Q11(Ks
−,K i+
))11plane
=(Q11(Ks
−,K i+
))22plane
= 0 ,
where a(Ks−) and b(Ks
−) are the reflection coefficients for a plane interface,
a(Ks
−)
=Ks
z − K iz
Ksz + Ki
z
e2jKszz′
,
b(Ks
−)
=m2
rsKsz − K i
z
m2rsK
sz + K i
z
e2jKszz′
. (2.224)
Thus
F(Ks
−)
= a(Ks
−)A(Ks
+
),
G(Ks
−)
= b(Ks
−)B(Ks
+
),
and(T(Ks
−, Ks
+
))11
plane= a(Ks
−)δ(Ks
x − Ksx, Ks
y − Ksy
),
(T(Ks
−, Ks
+
))22
plane= b(Ks
−)δ(Ks
x − Ksx, Ks
y − Ksy
),
where the wave vectors Ks
+, Ks− and K i
+ are related to each other by Snell’slaw. Actually, if K
s
+ is an arbitrary incident wave vector, then Ks− and K i
+
represents the reflected and the transmitted wave vectors, respectively. SettingKs
z = ks cos β0 and K iz = ki cos β, we see that the coefficients a(Ks
−) andb(Ks
−) given by (2.224) are the Fresnel reflection coefficients for perpendicularand parallel polarizations, respectively.
The final step of our analysis is the expansion of the scattered field givenby (2.221) in terms of regular vector spherical wave functions. Transformingthe integration over the rectangular components of the wave vector into anintegration over polar angles and using (2.211), gives
Es(r) = −∫ 2π
0
∫ π
π/2+j∞[G (β, α) eβ + jF (β, α) eα] ejKs
−·r sin β dβ dα ,

2.10 Particle on or near an Infinite Surface 181
where (ks, β, α) are the spherical coordinates of the wave vector Ks−. Further,
expanding the vector plane waves eβ exp (jKs− · r) and eα exp (jKs
− · r) interms of vector spherical wave functions yields
Es(r) =∞∑
n=1
n∑
m=−n
fRmnM1
mn (ksr) + gRmnN1
mn (ksr) , (2.225)
where
fRmn =
4jn+1
√2n (n + 1)
∫ 2π
0
∫ π
π/2+j∞
[G (β, α) mπ|m|
n (β) + F (β, α) τ |m|n (β)
]
×e−jmα sin βdβ dα ,
gRmn =
4jn+1
√2n (n + 1)
∫ 2π
0
∫ π
π/2+j∞
[G (β, α) τ |m|
n (β) + F (β, α) mπ|m|n (β)
]
×e−jmα sin βdβ dα .
Thus, the derivation of the vector spherical wave expansion of the electro-magnetic field scattered by an arbitrary infinite surface involves the followingsteps:
1. Representation of the incident field as an integral over vector plane waves.2. Calculation of the spectral amplitudes of the scattered field by using the
T -operator equation (2.223).3. Computation of the vector spherical wave expansion of the scattered field
by using (2.225).
Returning to the scattering problem of a particle near an arbitrary infinitesurface, we see that our analysis is complete if, according to Step 1, we areable to represent the plane electromagnetic wave Ee and the radiating vectorspherical wave functions M3
mn and N3mn as integrals over vector plane waves.
For Ee, we have
Ee(r) =∫
R2
[Ae(Ks
+)M(r,Ks+) + Be(Ks
+)N(r,Ks+)] dKs
x dKsy
ksKsz
with
Ae(Ks+) = jEe0,αksK
sz δ(Ks
x − Kex,Ks
y − Key) ,
Be(Ks+) = −Ee0,βksK
sz δ(Ks
x − Kex,Ks
y − Key) ,
and Ke+ = ke, while for M3
mn and N3mn, we obtain
(M3
mn (ksr)N3
mn (ksr)
)
=∫
R2
[(As(Ks
+)Bs(Ks
+)
)
M(r,Ks+) +
(Bs(Ks
+)As(Ks
+)
)
N(r,Ks+)
]
×dKs
x dKsy
ksKsz

182 2 Null-Field Method
with
As(Ks+) =
12πjn+1
1√
2n(n + 1)τ |m|n (β)ejmα ,
Bs(Ks+) =
12πjn+1
1√
2n(n + 1)mπ|m|
n (β)ejmα .
The T -operator solution is a formal solution since we assumed the invertibilityof the integral equation (2.219). The usefulness of the formalism in numericalapplications depends upon the possibility of discretizing (2.219) in a suitableway. This can be done for a class of simple infinite surfaces as for example planesurfaces or surfaces with periodic roughness and small amplitude roughness.It should be noted that for plane surfaces we obtain exactly the results derivedin our earlier analysis.

3
Simulation Results
In this chapter we present computer simulation results for the scattering prob-lems considered in Chap. 2. For the numerical analysis, we use our own soft-ware package and some existing electromagnetic scattering programs. After aconcise description of the T -matrix code, we present the theoretical bases ofthe electromagnetics programs which we used to verify the accuracy of the newimplementation. We then present simulation results for homogeneous, axisym-metric and nonaxisymmetric particles, inhomogeneous, layered and compositeparticles, and clusters of particles. The last sections deal with scattering by aparticle on or near a plane surface and the computation of the effective wavenumber of a half-space with randomly distributed particles.
3.1 T -matrix Program
A Fortran computer program has been written to solve various scatteringproblems in the framework of the null-field method. This section gives a shortdescription of the code, while more details concerning the significance of theinput and output parameters are given in the documentation on CD-ROM.
The main program TMATRIX.f90 calls a T -matrix routine for solving aspecific scattering problem. These routines computes the T -matrix of:
– Homogeneous, dielectric (isotropic, chiral) and perfectly conducting, ax-isymmetric particles (TAXSYM.f90),
– Homogeneous, dielectric (isotropic, uniaxial anisotropic, chiral) and per-fectly conducting, nonaxisymmetric particles (TNONAXSYM.f90)
– Axisymmetric, composite particles (TCOMP.f90)– Axisymmetric, layered particles (TLAY.f90)– An inhomogeneous, dielectric, axisymmetric particle with an arbitrarily
shaped inclusion (TINHOM.f90)– An inhomogeneous, dielectric sphere with a spherical inclusion (TIN-
HOM2SPH.f90)

184 3 Simulation Results
– An inhomogeneous, dielectric sphere with an arbitrarily shaped inclusion(TINHOMSPH.f90)
– An inhomogeneous, dielectric sphere with multiple spherical inclusions(TINHOMSPHREC.f90)
– Clusters of arbitrarily shaped particles (TMULT.f90)– Two homogeneous, dielectric spheres (TMULT2SPH.f90)– Clusters of homogeneous, dielectric spheres (TMULTSPH.f90 and TMULT-
SPHREC.f90)– Concentrically layered sphere (TSPHERE.f90)– A homogeneous, dielectric or perfectly conducting, axisymmetric particle
on or near a plane surface (TPARTSUB.f90)
Three other routine are invoked by the main program
– SCT.f90 computes the scattering characteristics of a particle using thepreviously calculated T matrix
– SCTAVRGSPH.f90 computes the scattering characteristics of an ensembleof polydisperse, homogeneous spherical particles
– EFMED.f90 computes the effective wave number of a half-space with ran-domly distributed particles
Essentially, the code performs a convergence test and computes the T -matrixand the scattering characteristics of particles with uniform orientation distri-bution functions.
An important part of the T -matrix calculation is the convergence proce-dure over the maximum expansion order Nrank, maximum azimuthal orderMrank and the number of integration points Nint. In fact, Nrank, Mrank andNint are input parameters and their optimal values must be found by the user.This is accomplished by repeated convergence tests based on the analysis ofthe differential scattering cross-section as discussed in Sect. 2.1.
The scattering characteristics depend on the type of the orientation distrib-ution function. By convention, the uniform distribution function is called com-plete if the Euler angles αp, βp and γp are uniformly distributed in the intervals(0, 360), (0, 180) and (0, 360), respectively. The normalization constant is4π for axisymmetric particles and 8π2 for nonaxisymmetric particles. The uni-form distribution function is called incomplete if the Euler angles αp, βp andγp are uniformly distributed in the intervals (αp min, αp max), (βp min, βp max),and (γp min, γp max), respectively. For axisymmetric particles, the orientationalaverage is performed over αp and βp, and the normalization constant is
(αp max − αp min) (cos βp min − cos βp max) ,
while for nonaxisymmetric particles, the orientational average is performedover αp, βp and γp, and the normalization constant is
(αp max − αp min) (cos βp min − cos βp max) (γp max − γp min) .
The scattering characteristics computed by the code are summarized later.

3.1 T -matrix Program 185
3.1.1 Complete Uniform Distribution Function
For the complete uniform distribution function, the external excitation is avector plane wave propagating along the Z-axis of the global coordinate sys-tem and the scattering plane is the XZ-plane. The code computes the follow-ing orientation-averaged quantities:
– The scattering matrix 〈F 〉 at a set of Nθ,RND scattering angles– The extinction matrix 〈K〉– The scattering and extinction cross-sections 〈Cscat〉 and 〈Cext〉 and– The asymmetry parameter 〈cos Θ〉.
The scattering angles, at which the scattering matrix is evaluated, are uni-formly spaced in the interval (θmin,RND, θmax,RND). The elements of the scat-tering matrix are expressed in terms of the ten average quantities
⟨|Sθβ |2
⟩,⟨|Sθα|2
⟩,⟨|Sϕβ |2
⟩,⟨|Sϕα|2
⟩,⟨SθβS∗
ϕα
⟩,
⟨SθαS∗
ϕβ
⟩, 〈SθβS∗
θα〉 ,⟨SθβS∗
ϕβ
⟩,⟨SθαS∗
ϕα
⟩,⟨SϕβS∗
ϕα
⟩
for macroscopically isotropic media, and the six average quantities⟨|Sθβ |2
⟩,⟨|Sθα|2
⟩,⟨|Sϕβ |2
⟩,⟨|Sϕα|2
⟩,⟨SθβS∗
ϕα
⟩,⟨SθαS∗
ϕβ
⟩
for macroscopically isotropic and mirror-symmetric media. 〈SpqS∗p1q1
〉 arecomputed at Nθ,GS scattering angles, which are uniformly spaced in the in-terval (0, 180). The scattering matrix is calculated at the same sample an-gles and polynomial interpolation is used to evaluate the scattering matrixat any polar angle θ in the range (θmin,RND, θmax RND). The average quanti-ties 〈SpqS
∗p1q1
〉 can be computed by using a numerical procedure or the an-alytical orientation-averaging approach described in Sect. 1.5. The numericalorientation-averaging procedure chooses the angles αp, βp and γp to samplethe intervals (0, 360), (0, 180) and (0, 360), respectively. The prescrip-tion for choosing the angles is to
– Uniformly sample in αp
– Uniformly sample in cos βp or nonuniformly sample in βp
– Uniformly sample in γp
The integration over αp and γp are performed with Simpson’s rule, and thenumber of integration points Nα and Nγ must be odd numbers. The integra-tion over βp can also be performed with Simpson’s rule, and in this specificcase, the algorithm samples uniformly in cosβp, and the number of integra-tion points Nβ is an odd number. Alternatively, Gauss–Legendre quadraturemethod can be used for averaging over βp, and Nβ can be any integer number.For the analytical orientation-averaging approach, the maximum expansionand azimuthal orders Nrank and Mrank (specifying the dimensions of the T

186 3 Simulation Results
matrix) can be reduced. In this case, a convergence test over the extinctionand scattering cross-sections gives the effective values N eff
rank and M effrank.
The orientation-averaged extinction matrix 〈K〉 is computed by using(1.125) and (1.126), and note that for macroscopically isotropic and mirror-symmetric media the off-diagonal elements are zero and the diagonal elementsare equal to the orientation-averaged extinction cross-section per particle.
For macroscopically isotropic and mirror-symmetric media, the orientation-averaged scattering and extinction cross-sections 〈Cscat〉 = 〈Cscat〉I and〈Cext〉 = 〈Cext〉I are calculated by using (1.124) and (1.122), respectively,while for macroscopically isotropic media, the code additionally computes〈Cscat〉V accordingly to (1.133), and 〈Cext〉V as 〈Cext〉V = 〈K14〉.
The asymmetry parameter 〈cos Θ〉 is determined by angular integrationover the scattering angle θ. The number of integration points is Nθ,GS andSimpson’s rule is used for calculation. For macroscopically isotropic andmirror-symmetric media, the asymmetry parameter 〈cos Θ〉 = 〈cos Θ〉I is cal-culated by using (1.134), while for macroscopically isotropic media, the codesupplementarily computes 〈cos Θ〉V accordingly to (1.135).
The physical correctness of the computed results is tested by using theinequalities (1.138) given by Hovenier and van der Mee [103]. The messagethat the test is not satisfied means that the computed results may be wrong.
The code also computes the average differential scattering cross-sections〈σdp〉 and 〈σds〉 for a specific incident polarization state and at a set of Nθ,GS
scattering angles (cf. (1.136) and (1.137)). These scattering angles are uni-formly spaced in the interval (0, 180) and coincide with the sample anglesat which the average quantities 〈SpqS
∗p1q1
〉 are computed. The polarizationstate of the incident vector plane wave is specified by the complex amplitudesEe0,β and Ee0,α, and the differential scattering cross-sections are calculatedfor the complex polarization unit vector
epol =1
√|Ee0,β |2 + |Ee0,α|2
(Ee0,βeβ + Ee0,αeα) . (3.1)
Note that Nθ,GS is the number of scattering angles at which 〈SpqS∗p1q1
〉, 〈σdp〉and 〈σds〉 are computed, and also gives the number of integration points forcalculating 〈Cscat〉V, 〈cos Θ〉I and 〈cos Θ〉V. Because the integrals are com-puted with Simpson’s rule, Nθ,GS must be an odd number.
3.1.2 Incomplete Uniform Distribution Function
For the incomplete uniform distribution function, we use a global coordinatesystem to specify both the direction of propagation and the states of polar-ization of the incident and scattered waves, and the particle orientation. Aspecial orientation with a constant orientation angle can be specified by set-ting Nδ = 1 and δmin = δmax, where δ stands for αp, βp and γp. For example,

3.1 T -matrix Program 187
uniform particle orientation distributions around the Z-axis can be specifiedby setting Nβ = 1 and βp min = βp max.
The scattering characteristics are averaged over the particle orientation byusing a numerical procedure. The prescriptions for choosing the sample anglesand the significance of the parameters are as in Sect. 3.1.1. For each particleorientation we compute the following quantities:
– The phase matrix Z at Nϕ scattering planes– The extinction matrix K for a plane wave incidence– The scattering and extinction cross-sections Cscat and Cext for incident
parallel and perpendicular linear polarizations– The mean direction of propagation of the scattered field g for incident
parallel and perpendicular linear polarizations
The azimuthal angles describing the positions of the scattering planes at whichthe phase matrix is computed are ϕ(1), ϕ(2), . . . , ϕ(Nϕ). In each scatteringplane i, i = 1, 2, . . . , Nϕ, the number of zenith angles is Nθ(i), while the zenithangle varies between θmin(i) and θmax(i). For each particle orientation, thephase and extinction matrices Z and K are computed by using (1.77) and(1.79), respectively, while the scattering and extinction cross-sections Cscat
and Cext are calculated accordingly to (1.101) and (1.100), respectively.The mean direction of propagation of the scattered field g is evaluated
by angular integration over the scattering angles θ and ϕ (cf. (1.87)), andthe numbers of integration points are Nθ,asym and Nϕ,asym. The integrationover ϕ is performed with Simpson’s rule, while the integration over θ can beperformed with Simpson’s rule or Gauss–Legendre quadrature method. Wenote that the optical cross-sections and the mean direction of propagation ofthe scattered field are computed for linearly polarized incident waves (vectorplane waves and Gaussian beams) by choosing αpol = 0 and αpol = 90 (cf.(1.18)).
The code also calculates the average differential scattering cross-sectionsσdp and σds in the azimuthal plane ϕGS and at a set of Nθ,GS scatteringangles. The average differential scattering cross-sections can be computed forscattering angles ranging from 0 to 180 in the azimuthal plane ϕGS and from180 to 0 in the azimuthal plane ϕGS +180, or for scattering angles rangingfrom 0 to 180 in the azimuthal plane ϕGS. The calculations are performedfor elliptically polarized vector plane waves (characterized by the complexpolarization unit vector epol as in (3.1)) and linearly polarized Gaussian beams(characterized by the polarization angle αpol).
For spherical particles, the code chooses a single orientation αp min =αp max = 0, βp min = βp max = 0 and γp min = γp max = 0, and setsMrank = Nrank.
The codes perform calculations with double- or extended-precision float-ing point variables. The extended-precision code is slower than the double-precision version by a factor of 5–6, but allow scattering computationsfor substantially larger particles. It should also be mentioned that the

188 3 Simulation Results
CPU time consumption rapidly increases with increasing particle size andasphericity.
The program is written in a modular form, so that modifications, if re-quired, should be fairly straightforward. In this context, the integration rou-tines, the routines for computing spherical and associated Legendre functionsor the routines for solving linear systems of equations can be replaced by moreefficient routines.
The main “drawback” of the code is that the computer time requirementsmight by higher in comparison to other more optimized T -matrix programs.Our intention was to cover a large class of electromagnetic scattering problemand therefore we sacrifice the speed in favor of the flexibility and code modu-larization. The code shares several modules which are of general use and arenot devoted to a specific application.
3.2 Electromagnetics Programs
The on-line directories created by Wriedt [266] and Flatau [67] provide links toseveral electromagnetics programs. In order to validate our software packagewe consider several computer programs relying on different methods. Thissection briefly reviews these methods without entering into deep details. Moreinformation can be found in the literature cited.
3.2.1 T -matrix Programs
Computer programs using the null-field method to calculate the electromag-netic scattering by homogeneous, axisymmetric particles have been given byBarber and Hill [8]. These programs compute:
– The angular scattering over a designated scattering plane or in all direc-tions for a particle in a fixed orientation
– The angular scattering and the optical cross-sections for an ensemble ofparticles randomly oriented in a 2D plane or in 3D
– The scattering matrix elements for an ensemble of particles randomly ori-ented in 3D
– The normalized scattering cross-sections versus size parameter for a par-ticle in fixed or random orientation
– The internal intensity distribution in the equatorial plane of a spheroidalparticle
We would like to mention that the general program structure and some pro-gramming solutions given by Barber and Hill have been adopted in our com-puter code.
The T -matrix codes developed by Mishchenko and Travis [167] andMishchenko et al. [168, 169] are efficient numerical tools for computing elec-tromagnetic scattering by homogeneous, axisymmetric particles with size

3.2 Electromagnetics Programs 189
significantly larger than a wavelength. The following computer programs areavailable on the World Wide Web at www.giss.nasa.gov/∼crimim:
– A Fortran code for computing the amplitude and phase matrices for ahomogeneous, axisymmetric particle in an arbitrary orientation
– A Fortran code for computing the far-field scattering and absorption char-acteristics of a polydisperse ensemble of randomly oriented, homogeneous,axisymmetric particles
The last code is suitable for practical applications requiring the knowl-edge of size-, shape-, and orientation-averaged quantities such as the op-tical cross-sections and phase and scattering matrix elements. The imple-mentation of the analytical orientation-averaging procedure makes this codethe fastest computer program for randomly oriented, axisymmetric parti-cles. The following computer programs are also provided at the w sitewww.giss.nasa.gov/∼crimim:
– A Lorenz–Mie code for computing the scattering characteristics of an en-semble of polydisperse, homogeneous, spherical particles and
– The Fortran code SCSMTM for computing the T -matrix of a spherecluster and the orientation-averaged scattering matrix and optical cross-sections [153]
3.2.2 MMP Program
MMP is a Fortran code developed by Hafner and Bomholt [94] which usesthe multiple multipole method for solving arbitrary 3D electromagnetic prob-lems. In the multiple multipole method, the electromagnetic fields are ex-pressed as linear combinations of spherical wave fields corresponding tomultipole sources. By locating these sources away from the boundary, themultipole expansions are smooth on the surface and the boundary singu-larities are avoided. The multipoles describing the internal field are locatedoutside the particle, while the multipoles describing the scattered field are po-sitioned inside the particle. Not only spherical multipoles can be used for fieldexpansions; other discrete sources as for instance distributed vector sphericalwave functions, vector Mie potentials or magnetic and electric dipoles canbe employed. Therefore, other names for similar concepts have been given,e.g., method of auxiliary sources [275], discrete sources method [49, 62], fic-titious sources method [140, 158], or Yasuura method [113]. An overview ofthe discrete sources method has been given by Wriedt [267] and a review ofthe latest literature in this field has been published by Fairweather et al. [63].By convention, we categorize the multiple multipole method as a discretesources method with multiple vector spherical wave functions. Below we sum-marize the basic concepts of the discrete sources method for the transmissionboundary-value problem.
Let Ψ3µ,Φ3
µ be a system of radiating solutions to the Maxwell equationsin Ds with the properties ∇×Ψ3
µ = ksΦ3µ and ∇×Φ3
µ = ksΨ3µ. Analogously,

190 3 Simulation Results
let Ψ1µ,Φ1
µ be a system of regular solutions to the Maxwell equations inDi satisfying ∇ × Ψ1
µ = kiΦ1µ and ∇ × Φ1
µ = kiΨ1µ. For the transmission
boundary-value problem, the system of vector functions⎧⎨
⎩
⎛
⎝n × Ψ3,1
µ
−j√
εs,iµs,i
n × Φ3,1µ
⎞
⎠ ,
⎛
⎝n × Φ3,1
µ
−j√
εs,iµs,i
n × Ψ3,1µ
⎞
⎠ , µ = 1, 2, . . .
⎫⎬
⎭ (3.2)
is assumed to be complete and linearly independent in L2tan(S), where L2
tan(S)is the product space L2
tan(S) = L2tan(S) × L2
tan(S) endowed with the scalarproduct
⟨(x1
x2
),
(y1
y2
)⟩
2,S
=⟨x1,y1
⟩2,S
+⟨x1,y1
⟩2,S
and L2tan(S) is the space of square integrable tangential fields on the surface
S. Approximate solutions to the scattered and internal fields are sought aslinear combinations of basis functions (3.2),
(EN
s,i(r)HN
s,i(r)
)
=N∑
µ=1
as,iNµ
⎛
⎝Ψ3,1
µ (r)
−j√
εs,iµs,i
Φ3,1µ (r)
⎞
⎠+ bs,iNµ
⎛
⎝Φ3,1
µ (r)
−j√
εs,iµs,i
Ψ3,1µ (r)
⎞
⎠ ,
r ∈ Ds,i .
The approximate electric and magnetic fields ENs and HN
s are expressed interms of discrete sources fields with singularities distributed in Di, and there-fore EN
s and HNs are analytic in Ds. Analogously, the approximate electric
and magnetic fields ENi and HN
i are expressed in terms of discrete sourcesfields distributed in Ds, and EN
i and HNi are analytic in Di. Then, using the
Stratton–Chu representation theorem and the continuity conditions on theparticle surface, we obtain the estimate
∥∥Es − EN
s
∥∥∞,Gs
+∥∥Hs − HN
s
∥∥∞,Gs
+∥∥Ei − EN
i
∥∥∞,Gi
+∥∥H i − HN
i
∥∥∞,Gi
≤ C(∥∥n × EN
s + n × Ee − n × ENi
∥∥
2,S
+∥∥n × HN
s + n × He − n × HNi
∥∥
2,S
)(3.3)
in any closed sets Gs ⊂ Ds and Gi ⊂ Di, where ‖.‖∞,G stands for the supre-mum norm, ‖a‖∞,G = maxr∈G |a(r)|. The estimate (3.3) reflects the ba-sic principle of the discrete sources method: an approximate solution to thetransmission boundary-value problem minimizes the residual electric and mag-netic fields on the particle surface. Due to the completeness property of the

3.2 Electromagnetics Programs 191
system of vector functions (3.2), the expansion coefficients as,iNµ and bs,iN
µ ,µ = 1, 2, . . . , N , can be determined by solving the minimization problem,
[as,iN
µ
bs,iNµ
]
= arg min∥∥n × EN
s + n × Ee − n × ENi
∥∥2
2,S
+∥∥n × HN
s + n × He − n × HNi
∥∥2
2,S
.
This minimization problem leads to a system of normal equations for theexpansion coefficients. Experience has shown that this technique often givesinaccurate and numerically unstable results with highly oscillating error dis-tributions along the boundary surface. Accurate and stable results can beobtained by using the point matching method with an overdetermined sys-tem of equations, that is, the boundary conditions are fulfilled at a set ofsurface points, while the number of surface points exceeds the number of un-knowns (more than twice). The resulting system of equations is solved in theleast-squares sense by using, for example, the QR-factorization.
The main problem in the multiple multipole method is the choice of thenumber, position and the order of multipoles, and the distribution of match-ing points. Some useful criteria can be summarized as follows. Firstly, thematching points on the boundary should be set with enough density, and theintervals between adjacent pairs of matching points must be far less than thewavelength, for suppressing errors of expansion on the boundary. Secondly,the poles should be neither too near nor too far from the boundary, since theformer requirement may avoid alternative errors corresponding to nonphys-ical rough solution on that interval; and a well-conditioned matrix will beformulated with the latter requirement. In view of the quasi-local behavior ofa multipole expansion, only a restricted area around its origin is influencedby this pole, so that a reasonable scheme is to let the area of influence of eachpole fit a portion of the boundary, but the whole boundary must be coveredby the areas of influence of all the poles. Finally, the highest order of a pole islimited by the density of matching points covered by its area of influence. Itshould be noted that the MMP code contains routines for automatically opti-mizing the number, location and order of multipoles. More detailed overviewson methodology, code and simulation technique can be found in the works ofLudwig [147,148], Hafner [91] and Bomholt [18]. The attractiveness and sim-plicity of the physical idea of the MMP and the public availability of the codeby Hafner [92,93] have resulted in widespread applications of this technique.
In addition to the MMP code, the DSM (discrete sources method) codedeveloped by Eremin and Orlov [61] will be used for computer simulations.This DSM code is devoted to the analysis of homogeneous, axisymmetric par-ticles using distributed vector spherical wave functions. For highly elongatedparticles, the sources are distributed along the axis of symmetry of the par-ticle, while for highly flattened particles, the sources are distributed in thecomplex plane (see Appendix B).

192 3 Simulation Results
3.2.3 DDSCAT Program
DDSCAT is a freely available software package which applies the discrete di-pole approximation (DDA) to calculate scattering and absorption of electro-magnetic waves by particles with arbitrary geometries and complex refractiveindices [55]. The discrete dipole approximation model the particle as an arrayof polarizable points and DDSCAT allows accurate calculations for particleswith size parameter ksa < 15, provided the refractive index mr is not largecompared to unity, |mr − 1| < 1. The discrete dipole approximation (some-times referred to as the coupled dipole method (CDM)) was apparently firstproposed by Purcell and Pennypacker [197]. The theory was reviewed anddeveloped further by Draine [53], Draine and Goodman [56] and Draine andFlatau [54]. An improvement of this method was given by Piller and Mar-tin [194] applying concepts from sampling theory, while Varadan et al. [237],Lakhtakia [130] and Piller [192] extended the discrete dipole approximation toanisotropic, bi-anisotropic and high-permittivity materials, respectively. Sincethe discrete dipole approximation can be derived from the volume integralequation we follow the analysis of Lakhtakia and Mulholland [131] and reviewthe basic concepts of the volume integral equation method and the discretedipole approximation.
The volume integral equation method relies on the integral representationfor the electric field
E (r) = Ee (r) + k2s
∫
Di
G (ks, r, r′) ·[m2
r (r′) − 1]E (r′) dV (r′) ,
r ∈ Ds ∪ Di .
The domain Di is discretized into simply connected elements (cells) Di,m,m = 1, 2, . . . , Ncells, and Di = ∪Ncells
m=1 Di,m. Each element Di,m is modeled asbeing homogeneous such that mr(r) = mr,m for r ∈ Di,m, even though thisassumption can lead to an artificial material discontinuity across the interfaceof two adjacent elements. As a consequence of the discretization process, theelement equation reads as
E (r) = Ee (r) + k2s
(m2
r,m − 1) ∫
Di,m
G (ks, r, r′) · E (r′) dV (r′)
+k2s
Ncells∑
n=1,n =m
(m2
r,n − 1)∫
Di,n
G (ks, r, r′) · E (r′) dV (r′) , r ∈ Di,m .
Due to the singularity at r′ = r it is necessary to approximate the integral
Em (r) =∫
Di,m
G (ks, r, r′) · E (r′) dV (r′) , r ∈ Di,m
analytically in a small volume around the singularity. With Dr being a sphereof radius r around the singularity, we transform the integral as follows:

3.2 Electromagnetics Programs 193
Em (r) =∫
Di,m−Dr
G (ks, r, r′) · E (r′) dV (r′)
+∫
Dr
G (ks, r, r′) · [E (r′) − E (r)] dV (r′)
+∫
Dr
[G (ks, r, r′) − Gs (ks, r, r′)
]· E (r) dV (r′)
+∫
Dr
Gs (ks, r, r′) · E (r) dV (r′) , (3.4)
where Gs is an auxiliary dyad, and
Gs (ks, r, r′) =1k2s
∇′ ⊗∇′(
14π |r′−r|
).
The first term in (3.4) is a nonsingular integral that can be computed numer-ically. When the integration volume Di,m is spherical and sufficiently small,we can set Di,m = Dr and the first term is zero. For the third term, we usethe coordinate-free representations
G (ks, r, r′) =
[
1 +j
ksR− 1
(ksR)2
]
I
−[
1 +3j
ksR− 3
(ksR)2
]
eR ⊗ eR
g (R)
and
Gs (ks, r, r′) =1
(ksR)2(I − 3eR ⊗ eR
) 14πR
,
where R = r − r′, R = |R|, eR = R/R and g(R) = exp(jksR)/(4πR), andobtain
∫
Dr
[G (ks, r, r′) − Gs (ks, r, r′)
]· E (r) dV (r′) = ME (r)
with
M =2
3k2s
[(1 − jksr) ejksr − 1
].
For the last term, the dyadic identity∫
D
∇′ ⊗ a dV =∫
S
n ⊗ a dS
with a = (1/k2s )∇′(1/(4π|r′−r|)), yields

194 3 Simulation Results
∫
Dr
Gs (ks, r, r′) · E (r) dV (r′) = − 1k2s
∫
Sr
n (r′)
(r′−r
4π |r′−r|3
)
· E (r) dS (r′)
= − 1k2s
LE (r) ,
where
L =13
.
The usual tradition is to neglect the second term assuming that the field isconstant or claiming that as the integration volume becomes small the inte-grand vanishes. As pointed out by Draine and Goodman [56], vanishing of thesecond term is of the same order as with the third term and cannot be omit-ted. Using the second-order Taylor expansion for each Cartesian componentEk of E,
Ek (r′) = Ek (r) + (r′−r) · ∇Ek (r) +12
(r′−r) · [(r′−r) · ∇]∇Ek (r) ,
and the vector Helmholtz equation
E + m2r,mk2
s E = 0 , in Di,m
we obtain [185]∫
Dr
G (ks, r, r′) · [E (r′) − E (r)] dV (r′) = M1E (r)
with
M1 =m2
r,m
k2s
[1 − jksr −
715
(ksr)2 +
215
j (ksr)3
]ejksr − 1
.
The final result is
Em (r) =(
M + M1 −1k2s
L
)E (r) +
∫
Di,m−Dr
G (ks, r, r′) · E (r′) dV (r′)
and the element equation read as[1 − k2
s
(m2
r,m − 1)(
M + M1 −1k2s
L
)]E (r)
−k2s
(m2
r,m − 1) ∫
Di,m−Dr
G (ks, r, r′) · E (r′) dV (r′)
= Ee (r) + k2s
Ncells∑
n=1,n =m
(m2
r,n − 1) ∫
Di,n
G (ks, r, r′) · E (r′) dV (r′) ,
r ∈ Di,m . (3.5)

3.2 Electromagnetics Programs 195
Within each volume element, the total field can be approximated by
E (r) ≈Nbasis∑
k=1
EkmW k (r) , r ∈ Di,m ,
where W k are referred to as the shape or basis functions. Frequently, node-based shape functions are used as basis functions, but edge-based shape func-tions, using an expansion of a vector field in terms of values associated withelement faces, are better suited for simulating electromagnetic fields at cornersand edges. A detailed mathematical analysis of edge-based shape functionsfor various two- and three-dimensional elements has been given by Graglia etal. [86]. Linear as well as higher order curvilinear elements have been discussedby Mur and deHoop [176], Lee et al. [139], Wang and Ida [249], Crowley etal. [42] and Sertel and Volakis [209]. In general, the edge-based shape func-tions can be categorized as either interpolatory or hierarchical. An elementis referred to as hierarchical if the vector basis functions forming the nth or-der element are a subset of the vector basis functions forming the (n + 1)thorder element. This property allows to use lowest order elements in regionswhere the field is expected to vary slowly and higher order elements in re-gions where rapid field variation is anticipated. For a tetrahedral element, ahierarchical edge-based element up to and including second order has beenintroduced by Webb and Forghani [259]. Additional to node- and edge-basedshape functions, low order vector spherical wave functions have been em-ployed by Peltoniemi [185]. In our analysis we assume that the electromag-netic field is constant over each element and consider the simplest type ofbasis functions, the constant pulse functions: W k(r) = ek for r ∈ Di,m, andW k(r) = 0 for r /∈ Di,m, where k = x, y, z and (ex,ey,ez) are the Cartesianunit vectors. This approach is called collocation method, since a certain valueof the electromagnetic field is assigned to the centroid rm of each element,i.e., E(r) ≈ E(rm) for r ∈ Di,m. Substituting this expansion into (3.5) andsetting Di,m = Dr (which gives
∫Di,m−Dr
G · E dV = 0), yields the system oflinear equations
Ee (rm) =Ncells∑
n=1
Amn · E (rn) , m = 1, 2, . . . , Ncells , (3.6)
where the dyadic kernel is given by
Amn =[1 − k2
s
(m2
r,m − 1)(
M + M1 −1k2s
L
)]Iδmn
−k2s
(m2
r,n − 1)(1 − δmn) VnG (ks, rm, rn) ,
and Vn is the volume of the n element.In computing the self-term Em we extracted from the original integrand a
singular function which approximates the integrand in the neighborhood of thesingularity. However, there are other efficient schemes to accurately compute

196 3 Simulation Results
singular integrals [3]. For example, in the framework of the volume integralequation method, Sertel and Volakis [209] transferred one of the derivative ofthe scalar Green function to the testing function using the divergence theo-rem. The resulting integrals are evaluated by the annihilation method, whichconverts first-order singular integrals into nonsingular integrals by using anappropriate parametric transformation (change of variables).
Whereas the volume integral equation method deals with the total field,the discrete dipole approximation exploits the concept of the exciting field,each volume element being explicitly modeled as an electric dipole moment.In this regard, we consider the field that excites the volume element Di,m
Eexc (rm) = Ee (rm)+k2s
Ncells∑
n=1,n =m
(m2
r,n − 1)VnG (ks, rm, rn) ·E (rn) (3.7)
and rewrite (3.5) as[1 − k2
s
(m2
r,m − 1)(
M + M1 −1k2s
L
)]E (rm) = Eexc (rm) . (3.8)
It is clear from (3.7) that the exciting field consists of the incident field and thefield contributions of all other volume elements Di,n with n = m. The heartof the discrete dipole approximation is (3.7), while (3.8) is used to express thetotal field in terms of the exciting field. In dyadic notations, (3.8) read as
Amm · E (rm) = Eexc (rm) ,
and the desired relation is
E (rm) = A−1
mm · Eexc (rm) . (3.9)
Inserting (3.9) into (3.7), we obtain the expression of the field that excitesthe volume element Di,m in terms of the exciting fields of all other volumeelements Di,n
Eexc (rm) = Ee (rm) + k2s
Ncells∑
n=1,n =m
(m2
r,n − 1)Vn
×[G (ks, rm, rn) · A−1
nn
]· Eexc (rn) .
Defining the polarizability dyad by
tn = εs
(m2
r,n − 1)VnA
−1
nn
and taking into account that ks = k0√
εs, yields
Ee (rm) =Ncells∑
n=1
Bmn · Eexc (rn) , m = 1, 2, . . . , Ncells , (3.10)

3.2 Electromagnetics Programs 197
where the dyadic kernel is
Bmn = Iδmn − k20 (1 − δmn) G (ks, rm, rn) · tn .
In terms of the dipole moment pm
pm = εs
(m2
r,m − 1)VmE (rm) ,
(3.9) can be written as
pm = tm · Eexc (rm)
and the effect of the exciting field can be interpreted as inducing a dipolemoment pm in each volume element Di,m. This is the origin of the term“discrete dipole approximation.”
Parenthetically we note that the discrete dipole approximation can beused to derive the size-dependent Maxwell–Garnett formula. For a collectionof identical spheres of volume V and relative refractive index mr, the polariz-ability dyad is
tm = αI ,
and the dipole moment satisfies the equation
pm = αEexc (rm) ,
where the polarizability scalar α is given by
α = εs
(m2
r − 1)V
[1 − k2
s
(m2
r − 1)(
M + M1 −1k2s
L
)]−1
. (3.11)
The size-dependent Maxwell–Garnett formula can now be obtained by com-bining (3.11) and (2.168) [129].
The maximum linear cross-sectional extent 2rm of Di,m is such that
rmmr,m
λ< 0.1 ,
that is, the dimension rm is no more than a tenth of the wavelength in thevolume element Di,m. This condition ensures that the spatial variations ofthe electromagnetic field inside each volume element are small enough, sothat each volume element can be thought of as a dipole scatterer. Conse-quently, for large scale simulations, the systems of equations (3.6) and (3.10)are excessively large and iterative solvers as the conjugate or bi-conjugategradient method are employed. The coupling submatrices in (3.6) and (3.10)depend on the absolute distance among elements, and the overall matricesare block Toplitz. Thus, (3.6) and (3.10) can be cast in circulant form, andthe fast Fourier transform can be employed to carry out the matrix–vectorproducts [68,80].

198 3 Simulation Results
3.2.4 CST Microwave Studio Program
CST Microwave Studio is a commercial software package which can be used foranalyzing the electromagnetic scattering by particles with complex geometriesand optical properties. Essentially, the electromagnetic simulator is based onthe finite integration technique (FIT) developed by Weiland [260]. The finiteintegration technique is simple in concept and provides a discrete reformu-lation of Maxwell’s equations in their integral from. Following the analysisof Clemens and Weiland [38] we recall the basic properties of the discreterepresentation of Maxwell’s equation by the finite integration technique.
The first discretization step of the finite integration method consists inthe restriction of the electromagnetic field problem, which represent an openboundary problem, to a simply connected and bounded space domain Ω con-taining the region of interest. The next step consists in the decomposition ofthe computational domain into a finite number of volume elements (cells).This decomposition yields the volume element complex G, which serves ascomputational grid. Assuming that Ω is brick-shaped, we have the volumeelement complex
G = Dijk/Dijk = [xi, xi+1] × [yj , yj+1] × [zk, zk+1]
i = 1, 2, . . . , Nx − 1, j = 1, 2, . . . , Ny − 1, k = 1, 2, . . . , Nz − 1 ,
and note that each edge and facet of the volume elements are associated witha direction.
Next, we consider the integral form of the Maxwell equations, i.e., forFaraday’s induction law and Maxwell–Ampere law we integrate the differentialequations on an open surface and apply the Stokes theorem, while for Gauss’electric and magnetic field laws we integrate the differential equations on abounded domain and use the Gauss theorem.
The Faraday law in integral form∮
∂S
E · ds = −∫
S
∂B
∂t· dS
with S being an arbitrary open surface contained in Ω, can be rewritten for thefacet Sz,ijk of the volume element Dijk as the ordinary differential equation
ex,ijk + ey,i+1jk − ex,ij+1k − ey,ijk = − ddt
bz,ijk ,
where
ex,ijk =∫ (xi+1,yj ,zk)
(xi,yj ,zk)
E · ds
is the electric voltage along the edge Lx,ijk of the facet Sz,ijk, and

3.2 Electromagnetics Programs 199
X
Y
Z ex,ijk
ex,ij+1k
ey,ijk
ey,i+1jk
bz,ijk
bx,ijk bx,i+1jk
by,ijk
by,ij+1
bz,ijk-1
Fig. 3.1. Electric voltages and magnetic fluxes on a volume element
bz,ijk =∫
Sz,ijk
B · dS
represents the magnetic flux through the facet Sz,ijk. Note that the orientationof the element edges influences the signs in the differential equation (Fig. 3.1).The Gauss magnetic field law in integral form
∫
S
B · dS = 0
with S being an arbitrary closed surface contained in Ω, yields for the bound-ary surface of the volume element Dijk,
−bx,ijk + bx,i+1jk − by,ijk + by,ij+1k − bz,ijk + bz,ijk+1 = 0 .
The discretization of the remaining two Maxwell equations requires the in-troduction of a second volume element complex G, which is the dual of theprimary volume element complex G. For the Cartesian tensor product grid G,the dual grid G is defined by taking the foci of the volume elements of G asgridpoints for the volume elements of G. With this definition there is a one-to-one relation between the element edges of G cutting through the elementsurfaces of G and conversely. For the dual volume elements, the Maxwell–Ampere law
∮
∂S
H · ds =∫
S
(∂D
∂t+ J
)· dS ,
and the Gauss electric field law∫
S
D · dS =∫
D
ρdV , S = ∂D

200 3 Simulation Results
are discretized in an analogous manner. The differential equations are for-mulated in terms of the magnetic grid voltages hα,ijk along the dual edgesLα,ijk, the dielectric fluxes dα,ijk and the conductive currents jα,ijk throughthe dual facets Sα,ijk, α = x, y, z, and the electric charge qijk in the dualvolume element Dijk (qijk =
∫Dijk
ρdV ).
Collecting the equations of all element surfaces of the complex pair G, Gand introducing the integral voltage-vectors e and h, the flux state-vectors band d, the conductive current-vector j, and the electric charge-vector q, wederive a set of discrete matrix equations, the so-called Maxwell grid equations
Ce = − ddt
b , Ch =ddt
d + j
and
Sb = 0 , Sd = q .
The transformation into frequency domain for the Maxwell grid equationswith e(t) = Reee−jωt, yields
Ce = jωb , Ch = −jωd + j .
The discrete curl-matrices C and C, and the discrete divergence matrices Sand S are defined on the grids G and G, respectively, and depend only onthe grid topology. The integral voltage- and flux state-variables allocated onthe two different volume element complexes are related to each other by thediscrete material matrix relations
d = M εe + p , j = Mκe , h = Mνb − m ,
where M ε is the permittivity matrix, Mκ is the matrix of conductivities,Mν is the matrix of reluctivities, and p and m are the electric and magneticpolarization vectors, respectively. The discrete grid topology matrices havethe same effect as the vector operators curl and div. For instance, the discreteanalog of the equation ∇ · ∇× = 0 (div curl = 0) is SC = 0 and SC =0. Transposition of these equations together with the relation between thediscrete curl-matrices C = C
T, yields the discrete equations CST = 0 and
CST
= 0, both corresponding to the equation ∇ × ∇ = 0 (curl grad = 0).Basic algebraic properties of the Maxwell grid equations also allow to proveconservation properties with respect to energy and charges.
The finite integration technique suffers somewhat from a deficiency in be-ing able to model very complicated cavities including curved boundaries withhigh precision, but the usage of the perfect boundary approximation eliminatethis deficiency [123].

3.3 Homogeneous, Axisymmetric and Nonaxisymmetric Particles 201
3.3 Homogeneous, Axisymmetricand Nonaxisymmetric Particles
In the following analysis we show results computed with the TAXSYM andTNONAXSYM routines. The flow diagram of these routines is shown inFig. 3.2. The input data file provides the variables specifying the optical prop-erties, geometry, type of discrete sources and error tolerances for the conver-gence tests over Nrank, Mrank and Nint. The model parameters control theinterpolation and integration processes, and the solution of the linear systemof equations. The current version of the TAXSYM code is directly applica-ble to spheroids, cylinders and rounded oblate cylinders. Nonaxisymmetricgeometries currently supported include ellipsoids, quadratic prisms and reg-ular polyhedral prisms. The user should be able to write new routines togenerate particles with other shapes. The codes can also read particle geom-etry information from files instead of automatically generating one of thegeometries listed above.
3.3.1 Axisymmetric Particles
The scattering characteristics of axisymmetric particles can be computed withlocalized or distributed sources. Specifically, localized sources are used to an-alyze the electromagnetic scattering by particles which are not too extremein terms of size parameter and aspect ratio, while distributed sources areemployed to compute the T matrix of large particles with extreme geome-tries. For highly elongated particles, the sources are distributed along the axisof symmetry, while for flattened particles, the sources are distributed in thecomplex plane.
T-Matrix Routine
T Matrix Scattering Characteristics
Convergence Test Results
Input Data Model Control Parameters Particle Geometry
Fig. 3.2. Flow diagram of TAXSYM and TNONAXSYM routines

202 3 Simulation Results
x
z
Y
Z
X
β
α
O
a
b
Fig. 3.3. Geometry of a prolate spheroid
Localized Sources
In our first example, we consider prolate spheroids in random and fixedorientation, and compare the results obtained with the TAXSYM code tothe solutions computed with the codes developed by Mishchenko [167–169].The orientation of the axisymmetric particle with respect to the global coor-dinate system is specified by the Euler angles of rotation αp and βp, and theincident field is a linearly polarized plane wave propagating along the Z-axis(Fig. 3.3). The rotational semi-axis (along the axis of symmetry) is ksa = 10,the horizontal semi-axis is ksb = 5, and the relative refractive index of thespheroid is mr = 1.5. The maximum expansion order and the number of in-tegration points are Nrank = 17 and Nint = 100, respectively. In Figs. 3.4 and3.5 we plot some elements of the scattering matrix for a randomly orientedspheroid. The agreement between the curves is acceptable. For a fixed orien-tation of the prolate spheroid, we list in Tables 3.1 and 3.2 the phase matrixelements Z11 and Z44, and Z21 and Z42, respectively. The Euler angles ofrotation are αp = βp = 45, and the matrix elements are computed in theazimuthal planes ϕ = 45 and ϕ = 225 at three zenith angles: 30, 90,and 150. The relative error is around 10% for the lowest matrix element andremains below 1% for other elements.
In the next example, we show results computed for a perfectly conductingspheroid of size parameter ksa = 10, aspect ratio a/b = 2, and Euler angles ofrotation αp = βp = 45. The perfectly conducting spheroid is simulated fromthe dielectric spheroid by using a very high value of the relative refractiveindex (mr = 1.e+30), and the version of the code devoted to the analysis ofperfectly conducting particles is taken as reference. For this application, the

3.3 Homogeneous, Axisymmetric and Nonaxisymmetric Particles 203
10−4
10−3
10−2
10−1
100
101
102
Sca
tterin
g M
atrix
Ele
men
ts
0 30 60 90 120 150 180Scattering Angle (deg)
F11 - TAXSYMF11 - code of MishchenkoF22 - TAXSYMF22 - code of Mishchenko
Fig. 3.4. Scattering matrix elements F11 and F22 of a dielectric prolate spheroid
−0.3
−0.2
−0.1
0.0
0.1
0.2
Sca
tterin
g M
atrix
Ele
men
ts
0 30 60 90 120 150 180Scattering Angle (deg)
F21 - TAXSYMF21 - code of MishchenkoF43 - TAXSYMF42 - code of Mishchenko
Fig. 3.5. Scattering matrix elements F21 and F43 of a dielectric prolate spheroid
maximum expansion order is Nrank = 18, while the number of integrationpoints is Nint = 200. The normalized differential scattering cross-sectionspresented in Fig. 3.6 are similar for both methods.
To verify the accuracy of the code for isotropic, chiral particles, we considera spherical particle of size parameter ksa = 10. The refractive index of theparticle is mr = 1.5 and the chirality parameter is βki = 0.1, where ki = mrks.Calculations are performed for Nrank = 18 and Nint = 200. Figure 3.7 com-pares the normalized differential scattering cross-sections computed with the

204 3 Simulation Results
Table 3.1. Phase matrix elements 11 and 44 computed with (a) the TAXSYMroutine and (b) the code of Mishchenko
ϕ θ Z11 (a) Z11 (b) Z44 (a) Z44 (b)
45 30 4.154e−01 4.152e−01 3.962e−01 3.961e−01
45 90 9.136e−01 9.142e−01 5.453e−01 5.459e−01
45 150 5.491e−02 5.489e−02 2.414e−03 2.420e−03
225 30 8.442e−01 8.439e−01 8.406e−01 8.402e−01
225 90 5.331e−02 5.329e−02 1.493e−04 1.360e−04
225 150 3.807e−02 3.805e−02 −1.400e−02 −1.402e−02
Table 3.2. Phase matrix elements 21 and 42 computed with (a) the TAXSYMroutine and (b) the code of Mishchenko
ϕ θ Z21 (a) Z21 (b) Z42 (a) Z42 (b)
45 30 2.134e−02 2.134e−02 1.229e−01 1.229e−01
45 90 3.016e−01 3.015e−01 6.681e−01 6.685e−01
45 150 −2.655e−03 −2.699e−03 −5.479e−02 −5.477e−02
225 30 6.677e−02 6.689e−02 −4.190e−02 −4.161e−02
225 90 −2.910e−02 −2.908e−02 −4.466e−02 −4.466e−02
225 150 −3.042e−02 −3.039e−02 1.810e−02 1.810e−02
10−3
10−2
10−1
100
DS
CS
0 30 60 90 120 150 180Scattering Angle (deg)
TAXSYM - perfect conductor - parallelTAXSYM - perfect conductor - perpendicularTAXSYM - dielectric - parallelTAXSYM - dielectric - perpendicular
Fig. 3.6. Normalized differential scattering cross-sections of a perfectly conductingprolate spheroid

3.3 Homogeneous, Axisymmetric and Nonaxisymmetric Particles 205
10−6
10−5
10−4
10−3
10−2
10−1
100
DS
CS
0 30 60 90 120 150 180Scattering Angle (deg)
TAXSYM - polarization angle = 0˚TAXSYM - polarization angle = 90˚code of Bohren - polarization angle = 0˚code of Bohren - polarization angle = 90˚
Fig. 3.7. Normalized differential scattering cross-sections of an isotropic chiralsphere
TAXSYM routine and the program developed by Bohren [16]. This programwas coded by Ute Comberg and is available from www.T-matrix.de. The scat-tering characteristics are computed in the azimuthal plane ϕ = 0 and for twopolarizations of the incident wave.
In the next example, we present computer simulations for Gaussian beamscattering. The particle is a prolate spheroid with semi-axes a = 2.0 µm andb = 1.0 µm, and relative refractive index mr = 1.5. The wavelength of theincident radiation is λ = 0.628 µm, and the orientation of the spheroid isspecified by the Euler angles αp = 0 and βp = 90. The maximum expansionand azimuthal orders are Nrank = 30 and Mrank = 12, respectively, while thenumber of integration points is Nint = 300. The variation of the differentialscattering cross-sections with the axial position z0 of the particle is shownin Fig. 3.8. The waist radius of the Gaussian beam is w0 = 10 µm, and theoff-axis coordinates are x0 = y0 = 0. The beam parameter is s = 1/(ksw0) =0.01, and for this value of s, the localized beam model gives accurate results.The scattering cross-section decreases from Cscat = 16.788 to Cscat = 14.520when z0 increases from 0 to 200 µm. Figure 3.9 illustrates the influence of theoff-axis coordinate x0 on the angular scattering for w0 = 10 µm and y0 =z0 = 0. In this case, the scattering cross-section decreases more rapidly andattains the value Cscat = 2.326 for x0 = 10 µm. The results of the differentialscattering cross-sections for different values of the beam waist radius are shownin Fig. 3.10. For w0 = 5 µm, the scattering cross-section is Cscat = 15.654,while for w0 = 2.5 µm, Cscat = 12.280.

206 3 Simulation Results
10−4
10−3
10−2
10−1
100
101
102
DS
CS
- p
aral
lel
0 30 60 90 120 150 180Scattering Angle (deg)
kz = 0kz = 2000
Fig. 3.8. Variation of the normalized differential scattering cross-sections with theaxial position of a prolate spheroid illuminated by a Gaussian beam
10−5
10−4
10−3
10−2
10−1
100
101
102
DS
CS
- p
aral
lel
0 30 60 90 120 150 180Scattering Angle (deg)
kx = 0kx = 50kx = 100
Fig. 3.9. Variation of the normalized differential scattering cross-sections with theoff-axis coordinate of a prolate spheroid illuminated by a Gaussian beam
Distributed Sources
While localized sources are used for not extremely aspherical particles, dis-tributed sources are suitable for analyzing particles with extreme geometries,i.e., particles whose shape differs significantly from a sphere. Extremely de-formed particles are encountered in various scientific disciplines as for instance

3.3 Homogeneous, Axisymmetric and Nonaxisymmetric Particles 207
10−4
10−3
10−2
10−1
100
101
102
DS
CS
- p
aral
lel
0 30 60 90 120 150 180Scattering Angle (deg)
kw = 100kw = 50kw = 25
Fig. 3.10. Variation of the normalized differential scattering cross-sections with thebeam waist radius
Fig. 3.11. Particles with extreme geometries: prolate spheroid, fibre, oblate cylinderand Cassini particle
astrophysics, atmospheric science and optical particle sizing. For example,light scattering by finite fibres is needed in optical characterization of asbestosor other mineral fibres, while flat particles are encountered as aluminium ormica flakes in coatings.
Figure 3.11 summarizes the particle shapes considered in our exemplarysimulation results. The spheroid is a relatively simple shape but convergenceproblems occur for large size parameters and high aspect ratios. The finite fibreis a more extreme shape because the flank is even and without convexities.This shape is modeled by a rounded prolate cylinder, i.e., by a cylinder withtwo half-spheres at the ends. In polar coordinates, a rounded prolate cylinderas shown in Fig. 3.12 is described by
r (θ) =
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
(a − b) cos θ +√
b2 − (a − b)2 sin2 θ ,
b/ sin θ ,
−(a − b) cos θ +√
b2 − (a − b)2 sin2 θ ,
θ < θ0,
θ0 ≤ θ ≤ π − θ0,
π − θ0 < θ < π,

208 3 Simulation Results
x
z
O
2b
2a
z1
z2
zN
Fig. 3.12. Geometry of a prolate cylinder and the distribution of the discrete sourceson the axis of symmetry
where θ0 = arctan[b/(a − b)]. The rounded oblate cylinder is constructedquite similar, i.e., the flank is rounded and top and bottom are flat. An oblatecylinder as shown in Fig. 3.13 is described in polar coordinates by
r (θ) =
⎧⎪⎪⎨
⎪⎪⎩
a/ cos θ ,
(b − a) sin θ +√
a2 − (b − a)2 cos2 θ ,
−a/ cos θ ,
θ < θ0
θ0 ≤ θ ≤ π − θ0
π − θ0 < θ < π
,
where θ0 = arctan[(b − a)/a]. Cassini particles are a real challenge for lightscattering simulations because the generatrix contains concavities on its topand bottom. The Cassini ovals can be described in polar coordinates by theequation
r (θ) =√
a2 − 2a2 sin2 θ +√
b4 − 4a4 sin2 θ + 4a4 sin4 θ
and the shape depends on the ratio b/a. If a < b the curve is an oval loop,for a = b the result is a lemniscate, and for a > b the curve consists of twoseparate loops. If a is chosen slightly smaller than b we obtain a concave,bone-like shape, and this concavity becomes deeper as a approaches to b.
For the prolate particles considered in our simulations, the sources are dis-tributed on the axis of symmetry as in Fig. 3.12, while for the oblate particles,the sources are distributed in the complex plane as in Fig. 3.13. The wave-length of the incident radiation is λ = 0.6328 µm, the relative refractive index

3.3 Homogeneous, Axisymmetric and Nonaxisymmetric Particles 209
x
z
O
2b
2a
ImZ
ReZ
z1z2zN
O
Fig. 3.13. Geometry of an oblate cylinder and the distribution of the discretesources in the complex plane
Table 3.3. Surface parameters of particles with extreme geometries
Particle type a (µm) b (µm) αp () βp ()
Prolate spheroid 8.5 0.85 0 0
Fibre 3 0.06 0 0
Oblate cylinder 0.03 3 0 0
Cassini particle 1.1 1.125 0 45
Table 3.4. Maximum expansion and azimuthal orders for particles with extremegeometries
Particle type Nrank Nint
Prolate spheroid 100 1000
Fibre 50 3000
Oblate cylinder 36 5000
Cassini particle 28 1000
is mr = 1.5 and the scattering characteristics are computed in the azimuthalplane ϕ = 0. The parameters describing the geometry and orientation ofthe particles are given in Table 3.3, while the parameters controlling the con-vergence process are listed in Table 3.4. Note that the Cassini particle has adiameter of about 3.15 µm and an aspect ratio of about 1/4.

210 3 Simulation Results
In Figs. 3.14–3.17 we plot the normalized differential scattering cross-sections together with the results computed with the discrete sources methodfor parallel and perpendicular polarizations, and for the case of normal inci-dence. It is apparent that the agreement between the curves is acceptable.
We conclude this section with an extensive validation test for an oblatecylinder of radius ksb = 15, length 2ksa = 7.5 and relative refractive index
106
105
104
103
102
101
100
101
102
DS
CS
180 120 60 0 60 120 180Scattering Angle (deg)
TAXSYM - parallelTAXSYM - perpendicularDSM - parallelDSM - perpendicular
Fig. 3.14. Normalized differential scattering cross-sections of a prolate spheroidwith a = 8.5 µm and b = 0.85 µm. The curves are computed with the TAXSYMroutine and the discrete sources method (DSM)
109
108
107
106
105
104
103
102
101
DS
CS
180 120 60 0 60 120 180Scattering Angle (deg)
TAXSYM - parallelTAXSYM - perpendicularDSM - parallelDSM - perpendicular
Fig. 3.15. Normalized differential scattering cross-sections of a fibre particle witha = 3.0 µm and b = 0.06 µm. The curves are computed with the TAXSYM routineand the discrete sources method (DSM)

3.3 Homogeneous, Axisymmetric and Nonaxisymmetric Particles 211
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
101
102
103
DS
CS
−180 −120 −60 0 60 120 180Scattering Angle (deg)
TAXSYm - parallelTAXSYM - perpendicularDSM - parallelDSM - perpendicular
Fig. 3.16. Normalized differential scattering cross-sections of an oblate cylinderwith a = 0.03 µm and b = 3.0 µm. The curves are computed with the TAXSYMroutine and the discrete sources method (DSM)
10−5
10−4
10−3
10−2
10−1
100
101
102
DS
CS
−180 −120 −60 0 60 120 180Scattering Angle (deg)
TAXSYM - parallelTAXSYM - perpendicularDSM - parallelDSM - perpendicular
Fig. 3.17. Normalized differential scattering cross-sections of a Cassini particle witha = 1.1 and b = 1.125. The curves are computed with the TAXSYM routine andthe discrete sources method (DSM)
mr = 1.5. The T -matrix calculations are performed with Nrank = 30 sourcesdistributed in the complex plane and by using Nint = 300 integration pointson the generatrix curve. The scattering characteristics plotted in Fig. 3.18 arecalculated for the Euler angles of rotation αp = βp = 0 and for the caseof normal incidence. Also shown are the results computed with the discrete

212 3 Simulation Results
10−710−610−510−410−310−210−1100101102103104
DSC
S
0 30 60 90 120 150 180Scattering Angle (deg)
TAXSYM - parallelTAXSYM - perpendicularDSM - parallelDSM - perpendicularMMP - parallelMMP - perpendicularDDA - parallelDDA - perpendicularCST - parallelCST - perpendicular
Fig. 3.18. Normalized differential scattering cross-sections of an oblate cylinderwith ksb = 15 and 2ksa = 7.5. The curves are computed with the TAXSYM routine,discrete sources method (DSM), multiple multipole method (MMP), discrete dipoleapproximation (DDA) and finite integration technique (CST)
10−5
10−4
10−3
10−2
10−1
100
DS
CS
0 30 60 90 120 150 180Scattering Angle (deg)
TNONAXSYM - parallelTNONAXSYM - perpendicularDDA - parallelDDA - perpendicular
Fig. 3.19. Normalized differential scattering cross-sections of a dielectric cube com-puted with the TNONAXSYM routine and the discrete dipole approximation (DDA)
sources method, multiple multipole method, discrete dipole approximationand finite integration technique. No substantial differences between the curvesare noted. Further scattering patterns for finite fibres having a large aspectratio have been published by Pulbere and Wriedt [196].
3.3.2 Nonaxisymmetric Particles
In Fig. 3.19, we compare the results obtained with the TNONAXSYM routineto the discrete dipole approximation solutions. Calculations are performed for

3.3 Homogeneous, Axisymmetric and Nonaxisymmetric Particles 213
y
z
x
O2l
a
Fig. 3.20. Geometry of a hexagonal prism
a dielectric cube of length 2ksa = 10 and relative refractive index mr = 1.5.The incident wave propagates along the Z-axis of the global coordinate systemand the Euler orientation angles are αp = βp = γp = 0. Convergence isachieved for Nrank = 14 and Mrank = 12, while the numbers of integrationpoints on each square surface are Nint1 = Nint2 = 24.
As a second example, we consider a hexagonal prism (Fig. 3.20) of length2l = 1.154 µm, hexagon side a = 1.154 µm and relative refractive indexmr = 1.5. The wavelength of the incident radiation is taken to be λ =0.628 µm, and the orientation of the hexagonal prism is specified by the Eulerangles αp = βp = 0 and γp = 90. For this application, the maximumexpansion and azimuthal orders are Nrank = 22 and Mrank = 20, respec-tively. Figure 3.21 compares results obtained with the TNONAXSYM routineand the finite integration technique. The agreement between the curves isacceptable.
Figure 3.22 illustrates the normalized differential scattering cross-sectionsfor a positive uniaxial anisotropic cube of length 2a = 0.3 µm, and relativerefractive indices mrx = mry = 1.5 and mrz = 1.7. The principal coordinatesystem coincides with the particle coordinate system, i.e., αpr = βpr = 0.Calculations are performed at a wavelength of λ = 0.3 µm and for the caseof normal incidence. The parameters controlling the T -matrix calculationsare Nrank = 18 and Mrank = 18, while the numbers of integration points oneach cube face are Nint1 = Nint2 = 50. The behavior of the far-field patternsobtained with the TNONAXSYM routine, discrete dipole approximation andfinite integration technique is quite similar.
Figure 3.23 shows plots of the differential scattering cross-sections versusthe scattering angle for a negative uniaxial anisotropic ellipsoid of semi-axislengths a = 0.3 µm, b = 0.2 µm and c = 0.1 µm, and relative refractive indicesmrx = mry = 1.5 and mrz = 1.3. The orientation of the principal coordinatesystem is given by the Euler angles αpr = βpr = 0 and the wavelength of

214 3 Simulation Results
10−5
10−4
10−3
10−2
10−1
100
101
DS
CS
0 30 60 90 120 150 180Scattering Angle (deg)
TNONAXSYM - parallelTNONAXSYM - perpendicularCST - parallelCST - perpendicular
Fig. 3.21. Normalized differential scattering cross-sections of a dielectric hexagonalprism computed with the TNONAXSYM routine and the finite integration technique(CST)
10−5
10−4
10−3
10−2
10−1
100
DSC
S
0 30 60 90 120 150 180Scattering Angle (deg)
TNONAXSYM - parallelTNONAXSYM - perpendicularDDA - parallelDDA - perpendicularCST - parallelCST - perpendicular
Fig. 3.22. Normalized differential scattering cross-sections of a uniaxial anisotropiccube computed with the TNONAXSYM routine, discrete dipole approximation(DDA) and finite integration technique (CST)
the incident radiation is λ = 0.3 µm. The maximum expansion and azimuthalorders are Nrank = 11 and Mrank = 11, respectively, and the numbers ofintegration points in the zenith and azimuthal directions are Nint1 = 100 and

3.3 Homogeneous, Axisymmetric and Nonaxisymmetric Particles 215
10−4
10−3
10−2
10−1
100
DSC
S
0 30 60 90 120 150 180Scattering Angle (deg)
TNONAXSYM - phi = 0˚TNONAXSYM - phi = 90˚CST - phi = 0˚CST - phi = 90˚
Fig. 3.23. Normalized differential scattering cross-sections of a uniaxial anisotropicellipsoid computed with the TNONAXSYM routine and the finite integration tech-nique (CST)
Nint2 = 100, respectively. The curves show that the differential scatteringcross-sections are reasonably well reproduced by the TNONAXSYM routine.
Next we present calculations for a dielectric, a perfectly conducting anda chiral cube of length 2ksa = 10. The refractive index of the dielectriccube is mr = 1.5 and the chirality parameter is βki = 0.1. The scatteringcharacteristics are computed by using the symmetry properties of the tran-sition matrix. For particles with a plane of symmetry perpendicular to theaxis of rotation (mirror symmetric particles with the surface parameteriza-tion r(θ, ϕ) = r(π − θ, ϕ)) the T matrix can be computed by integrating θover the interval [0, π/2], while for particles with azimuthal symmetry (parti-cles with the surface parameterization r(θ, ϕ) = r(θ, ϕ+2π/N), where N ≥ 2)the T matrix can be computed by integrating ϕ over the interval [0, 2π/N ].For T -matrix calculations without mirror and azimuthal symmetries, thenumbers of integration points on each square surface are Nint1 = Nint2 = 30.For calculations using azimuthal symmetry, the numbers of integration pointson the top and bottom quarter-square surfaces are Nint1 = Nint2 = 20, whilefor calculations using mirror symmetry, the numbers of integration points onthe lateral half-square surface are Nint1 = Nint2 = 20. The integration sur-faces are shown in Fig. 3.24, and the differential scattering cross-sections areplotted in Figs. 3.25–3.27. The results obtained using different techniques aregenerally close to each other.

216 3 Simulation Results
y
z
x
O
2a
Fig. 3.24. Integration surfaces for a cube
10−4
10−3
10−2
10−1
100
101
DSC
S
0 60 120 180 240 300 360Scattering Angle (deg)
parallelperpendicularparallel - azimuthal symmetryperpendicular - azimuthal symmetryparallel - azimuthal and mirror symmetryperpendicular - azimuthal and mirror symmetry
Fig. 3.25. Normalized differential scattering cross-sections of a dielectric cube usingthe symmetry properties of the transition matrix
3.3.3 Triangular Surface Patch Model
Some nonaxisymmetric particle shapes such as ellipsoids, quadratic prismsand regular polyhedral prisms are directly included in the Fortran program

3.3 Homogeneous, Axisymmetric and Nonaxisymmetric Particles 217
10−4
10−3
10−2
10−1
100
101
DSC
S
0 60 120 180 240 300 360Scattering Angle (deg)
parallel - azimuthal symmetryperpendicular - azimuthal symmetryparallelperpendicular
Fig. 3.26. Normalized differential scattering cross-sections of a chiral cube usingthe symmetry properties of the transition matrix
10−5
10−4
10−3
10−2
10−1
100
101
DSC
S
0 60 120 180 240 300 360
Scattering Angle (deg)
parallel - azimuthal and mirror symmetryperpendicular - azimuthal and mirror symmetryparallelperpendicular
Fig. 3.27. Normalized differential scattering cross-sections of a perfectly conductingcube using the symmetry properties of the transition matrix
as it is provided on the CD-ROM with the book. To handle arbitrary particlegeometries, the program can also read particle shape data from an input file.
The particle shape data is based on a surface description using a triangularsurface patch model. There are various 3D object file formats suitable for ameshed particle shape. We decided for the Wavefront .obj file format but the

218 3 Simulation Results
program will only support the polygonal format subset and not the free-formgeometry (also included in the .obj file format). In this case, a triangular sur-face patch model of the particle surface has to be generated by an adequatesoftware. For shapes given by an implicit equation, the HyperFun polygo-nizer [106,183] supporting high-level language functional representations is apossible candidate for surface mesh generation. Function representation is ageneralization of traditional implicit surfaces and constructive solid geometry,which allows the construction of complex shapes such as isosurfaces of real-valued functions [184]. The HyperFun polygonizer generates a VRML outputof a sufficiently regular triangular patch model, which is then converted to the.obj file format by using the 3D Exploration program.
To compute the T -matrix elements by surface integrals we employ a mod-ified midpoint or centroid quadrature. The integral over each surface patchis approximated by multiplying the value of the integrand at the centroid bythe patch area [79]
∫
S
fdS ≈∑
i
f(vi,c)area[vi,1, vi,2, vi,3] , (3.12)
where, vi,1, vi,2, vi,3 are the vertices spanning a triangle and vi,c denotes themass center of the triangle [vi,1, vi,2, vi,3]
vi,c =13
3∑
j=1
vi,j . (3.13)
For a sufficiently large number of surface patches, the use of this centroidintegration is satisfactorily accurate. In convergence checks versus the numberof triangular faces, we found that this centroid quadrature is quite stableand the computational results are not much influenced by the number ofintegration elements.
As an example, we consider a sphere which has been cut at a quarter of itsdiameter on the z-axis as shown in Fig. 3.28. The cut sphere has been meshed
Fig. 3.28. Geometry of a cut sphere with 10,132 faces

3.3 Homogeneous, Axisymmetric and Nonaxisymmetric Particles 219
10−4
10−3
10−2
10−1
100
101
102
103
104
DSC
S
0 30 60 90 120 150 180Scattering Angle (deg)
cut sphere - parallelcut sphere - perpendicularsphere - parallelsphere - perpendicular
Fig. 3.29. Normalized differential scattering cross-sections of a sphere and a cutsphere
Fig. 3.30. Geometry of a cube shaped particle with 31,284 faces
with 10132 faces, the Mie parameter computed from the radius is 10, therefractive index is 1.5 and the direction of the incident plane wave is alongthe z-axis. In Fig. 3.29 the scattering pattern is plotted together with thescattering pattern of a sphere with the same parameters. For better visibilitythe curves are shifted and it is apparent that there are pronounced differencesin the scattering diagrams of a sphere and a cut sphere.
There are different ways to compute scattering by arbitrary particle shapesreconstructed from a number of measured data points. Next we present anexample using compactly supported radial basis functions (CS-RBF) for scat-tered data points processing. For this application we used the software toolkitby Kojekine et al. [121] available from www.karlson.ru. The data points rep-resent a cube shaped particle as depicted in Fig. 3.30 and a number of 378

220 3 Simulation Results
Fig. 3.31. Geometry of a cube shaped particle with 17,680 faces approximated byCS-RBF
10−4
10−3
10−2
10−1
100
101
102
103
104
DSC
S
0 30 60 90 120 150 180Scattering Angle (deg)
cubecube cs-rbf
Fig. 3.32. Normalized differential scattering cross-sections for parallel polarizationof a cube and a reconstructed cube
surface points were used in shape reconstruction. The result of the shape re-construction can be seen in Fig. 3.31, while in Figs. 3.32 and 3.33 the scatteringdiagrams of the original and the reconstructed cubes are plotted. There areonly minor differences in the backscattering region. The particle shapes havebeen discretized to a large number of surface patches by using a divide by fourscheme and the Rational Reducer Professional software for grid reduction, sothat there are finally 17,680 triangular faces with the reconstructed cube.
Scattering results for nonaxisymmetric particles using the superellipsoidas a model particle shape have been given by Wriedt [268]. The programSScaTT (Superellipsoid Scattering Tool) includes a small graphical user in-terface to generate various superellipsoid particle shape modes and is available

3.4 Inhomogeneous Particles 221
10−4
10−3
10−2
10−1
100
101
102
103
104
DS
CS
0 30 60 90 120 150 180
Scattering Angle (deg)
cube
cube cs-rbf
Fig. 3.33. Normalized differential scattering cross-sections for perpendicular polar-ization of a cube and a reconstructed cube
T-Matrix Routine
T Matrix Scattering Characteristics
Convergence Test Results
Input Data Model Control Parameters
T matrix of theinclusion / particles
Fig. 3.34. Flow diagram of the TINHOM routine
on CD-ROM with this book. The effect of particle surface discretization on thecomputed scattering patterns has been analyzed by Hellmers and Wriedt [99].
3.4 Inhomogeneous Particles
This section discusses numerical and practical aspects of T -matrix calcula-tions for inhomogeneous particles. The flow diagram of the TINHOM rou-tine is shown in Fig. 3.34. The program supports scattering computation foraxisymmetric and dielectric host particles with real refractive index. Themain feature of this routine is that the T -matrix of the inclusion is providedas input parameter. The inclusion can be a homogeneous, axisymmetric or

222 3 Simulation Results
r
x
z
O
x1
z1a1
b1
β1
Fig. 3.35. Geometry of an inhomogeneous sphere with a spheroidal inclusion
nonaxisymmetric particle, a composite or a layered scatterer and an aggre-gate. This choice enables the analysis of particles with complex structure andenhances the flexibility of the program. For computing the T -matrix of theinclusion, the refractive index of the ambient medium must be identical withthe relative refractive index of host particle.
We consider an inhomogeneous sphere of radius ksr = 10 as shown inFig. 3.35. The inhomogeneity is a prolate spheroid of semi-axes ksa1 = 5 andksb1 = 5. The relative refractive indices of the sphere and the spheroid withrespect to the ambient medium are mr = 1.2 and mr1 = 1.5, respectively,and the Euler angles specifying the orientation of the prolate spheroid withrespect to the particle coordinate system are αp1 = βp1 = 45. The differentialscattering cross-sections are calculated for the case of normal incidence, andthe maximum expansion and azimuthal orders for computing the inclusion Tmatrix are Nrank = 10 and Mrank = 5, respectively. In Fig. 3.36, we comparethe T -matrix results to those obtained with the multiple multipole method.The agreement between the scattering curves is acceptable.
In Fig. 3.37, we show an inhomogeneous sphere with a spherical inclusion.The radii of the host sphere and the inclusion are R = 1.0 µm and r = 0.5 µm,respectively, while the relative refractive indices with respect to the ambi-ent medium are mr = 1.33 and mr1 = 1.5, respectively. The inhomogeneity isplaced at the distance z1 = 0.25 µm with respect to the particle coordinate sys-tem and the wavelength of the incident radiation is chosen as λ = 0.6328 µm.

3.4 Inhomogeneous Particles 223
10−6
10−5
10−4
10−3
10−2
10−1
100
DS
CS
0 60 120 180 240 300 360
Scattering Angle (deg)
TINHOM - parallelTINHOM - perpendicularMMP - parallelMMP - perpendicular
Fig. 3.36. Normalized differential scattering cross-sections of an inhomogeneoussphere with a spheroidal inclusion. The results are computed with the TINHOMroutine and the multiple multipole method (MMP)
z1
O1
O x
z
R
r
Fig. 3.37. Geometry of an inhomogeneous sphere with a spherical inclusion

224 3 Simulation Results
10−5
10−4
10−3
10−2
10−1
100
101
102
DS
CS
0 60 120 180 240 300 360
Scattering Angle (deg)
TINHOM2SPH - parallelTINHOM2SPH - perpendicularcode of Videen - parallelcode of Videen - perpendicular
Fig. 3.38. Normalized differential scattering cross-sections of an inhomogeneoussphere with a spherical inclusion
The results of the differential scattering cross-sections computed with the TIN-HOM2SPH routine and the code developed by Videen et al. [243] are shown inFig. 3.38. The plots demonstrate a complete agreement between the scatteringcurves. We note that the FORTRAN code developed by Videen et al. [243](see also, [180]), uses the Lorenz–Mie theory to represent the electromagneticfields. To exploit the orthogonality of the vector spherical wave functions, thetranslation addition theorem is used to re-expand the field scattered by theinhomogeneity about the origin of the host sphere.
In order to provide a numerical test of the accuracy of the recursive T -matrix algorithm described in Sect. 2.6, we consider an inhomogeneous spherewith multiple spherical inclusions. The radius of the spherical inclusions isksr = 0.3, and the maximum expansion and azimuthal orders for comput-ing the inclusion T -matrix are Nrank = Mrank = 3. The radius of the hostsphere is ksR = ksRcs(1) = 3.5 and 200 inhomogeneities are generated byusing the sequential addition method [47]. The relative refractive indices withrespect to the ambient medium are mr = 1.2 and mr1 = 1.5. According tothe guidelines of the recursive T -matrix algorithm, two auxiliary surfaces ofradii ksRcs(2) = 2.7 and ksRcs(3) = 2.2 are considered in the interior of thehost particle. The values of the maximum expansion and azimuthal ordersfor each auxiliary surface are given in Table 3.5. The matrix inversion is per-formed with the bi-conjugate gradient method instead of the LU-factorizationmethod. The results presented in Fig. 3.39 correspond to the direct methodand the recursive algorithm with one and two auxiliary surfaces. The agree-ment between the scattering curves is satisfactory, and note that the recursivealgorithm with two auxiliary surfaces is faster by a factor of 2 than the directmethod.

3.5 Layered Particles 225
Table 3.5. Maximum expansion and azimuthal orders for the auxiliary surfaces
Auxiliary surface Nrank Mrank
1 8 5
2 6 4
3 6 4
10−5
10−4
10−3
10−2
10−1
DS
CS
0 30 60 90 120 150 180
Scattering Angle (deg)
parallel - direct methodparallel - RTA with 1 surfaceparallel - RTA with 2 surfacesperpendicular - direct methodperpendicular - RTA with 1 surfaceperpendicular - RTA with 2 surfaces
Fig. 3.39. Normalized differential scattering cross-sections of an inhomogeneoussphere with multiple spherical inclusions
3.5 Layered Particles
In the following examples we consider electromagnetic scattering by axisym-metric, layered particles. An axisymmetric, layered particle is an inhomoge-neous particle consisting of several consecutively enclosing and rotationallysymmetric surfaces with a common axis of symmetry. The scattering compu-tations are performed with the TLAY routine and the set of routines devotedto the analysis of inhomogeneous particles. Particle geometries currently sup-ported by the TLAY routine include layered spheroids and cylinders. We notethat localized and distributed sources can be used for T -matrix calculations,and in contrast to the TINHOM routine, the relative refractive index of thehost particle can be a complex quantity (absorbing dielectric medium).
Figure 3.40 shows a layered spheroid with ksa = 10, ksb = 8, ksa1 = 8,ksb1 = 3 and ksz1 = 3. The relative refractive indices of the host spheroidand the inhomogeneity with respect to the ambient medium are mr = 1.2and mr1 = 1.5, respectively. Numerical results are presented as plots of thedifferential scattering cross-sections for the inhomogeneous spheroid in fixedor random orientation. The scattering characteristics are computed with lo-calized and distributed sources, whereas the distributed sources are placed

226 3 Simulation Results
a
b
b1
a1
z1
O1
O
z
Fig. 3.40. Geometry of a layered spheroid
Table 3.6. Parameters of calculation for an oblate layered spheroid
Type of sources Nrank-host particle Nrank-inclusion Nint
Localized 17 12 500
Distributed 14 8 2,000
along the symmetry axis of the prolate spheroids. The maximum expansionorders are Nrank = 20 for the host spheroid and Nrank = 13 for the inclusion.The global number of integration points is Nint = 200 for localized sources,and Nint = 1000 for distributed sources. The TINHOM routine uses as in-put parameter the inclusion T -matrix, which is characterized by Nrank = 13and Mrank = 5. The results presented in Figs. 3.41 and 3.42 show a completeagreement between the different methods.
Scattering by oblate spheroids can be computed with localized and dis-crete sources distributed in the complex plane. Figure 3.43 compares resultsobtained with localized and distributed sources for an oblate layered spheroidwith ksa = 5, ksb = 10, ksa1 = 3 and ksb1 = 5. The relative refractive indicesare mr = 1.2 and mr1 = 1.5, and the parameters of calculation are given inTable 3.6.

3.5 Layered Particles 227
10−6
10−5
10−4
10−3
10−2
10−1
100
101
DS
CS
0 60 120 180 240 300 360
Scattering Angle (deg)
TLAY - localized sources - parallelTLAY - localized sources - perpendicularTLAY - distributed sources - parallelTLAY - distributed sources - perpendicularTINHOM - parallelTINHOM - perpendicular
Fig. 3.41. Normalized differential scattering cross-sections of a layered spheroid
10−3
10−2
10−1
100
101
<D
SC
S>
0 30 60 90 120 150 180Scattering Angle (deg)
TLAY - localized sources - parallelTLAY - localized sources - perpendicularTLAY - distributed sources - parallelTLAY - distributed sources - perpendicularTINHOM - parallelTINHOM - perpendicular
Fig. 3.42. Averaged differential scattering cross-sections of a layered spheroid
For highly elongated particles, distributed sources are required to achieveconvergence. The results plotted in Fig. 3.44 correspond to a layered cylinderwith ksL = 10, ksr = 2, ksL1 = 5 and ksr1 = 1 (Fig. 3.45). The relativerefractive indices of the host particle and the inclusions are mr = 1.2 andmr1 = 1.4, respectively. The maximum expansion orders are Nrank = 14 for

228 3 Simulation Results
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
101
DS
CS
0 60 120 180 240 300 360Scattering Angle (deg)
parallel - distributed sourcesparallel - localized sourcesperpendicular - distributed sourcesperpendicular - localized sources
Fig. 3.43. Normalized differential scattering cross-sections of an oblate layeredspheroid
10−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
DS
CS
0 60 120 180 240 300 360Scattering Angle (deg)
parallelperpendicular
Fig. 3.44. Normalized differential scattering cross-sections of a layered cylinder
the host particle and Nrank = 8 for the inclusion, while the global number ofintegration points is Nint = 1,000.
In the next example, the host particle is a sphere of radius ksR = 10, theinclusion is a prolate spheroid with ksa1 = 8 and ksb1 = 3, and the relativerefractive indices are mr = 1.2 and mr1 = 1.5. Figures 3.46 and 3.47 compareresults obtained with the routines TLAY, TINHOMSPH and TINHOM. Theagreement between the scattering curves is very good.

3.5 Layered Particles 229
L
r
x
z
L 1
r1
Fig. 3.45. Geometry of a layered cylinder
10−5
10−4
10−3
10−2
10−1
100
101
102
DSC
S
0 60 120 180 240 300 360Scattering Angle (deg)
TLAY - parallelTLAY - perpendicularTINHOMSPH - parallelTINHOMSPH - perpendicularTINHOM - parallelTINHOM - perpendicular
Fig. 3.46. Normalized differential scattering cross-sections of a layered particleconsisting of a host sphere and a spheroidal inclusion
In Fig. 3.48, we show results for a concentrically layered sphere consisting ofthree layers of radii ksr1 = 10, ksr2 = 7 and ksr3 = 4. The relative refractiveindices with respect to the ambient medium are mr1 = 1.2 + 0.2j, mr2 =1.5 + 0.1j and mr3 = 1.8 + 0.3j. The scattering curves obtained with theTSPHERE and TLAY routines are close to each other.

230 3 Simulation Results
10−4
10−3
10−2
10−1
100
101
102
<D
SC
S>
0 30 60 90 120 150 180Scattering Angle (deg)
TLAY - parallelTLAY - perpendicularTINHOMSPH - parallelTINHOMSPH - perpendicularTINHOM - parallelTINHOM - perpendicular
Fig. 3.47. Averaged differential scattering cross-sections of a layered particle con-sisting of a host sphere and a spheroidal inclusion
10−5
10−4
10−3
10−2
10−1
100
101
DS
CS
0 60 120 180 240 300 360Scattering Angle (deg)
TLAY - parallelTLAY - perpendicularTSPHERE - parallelTSPHERE - perpendicular
Fig. 3.48. Normalized differential scattering cross-sections of a layered sphere
3.6 Multiple Particles
In the following analysis we investigate electromagnetic scattering by a sys-tem of particles. The basic routine for analyzing this type of scattering prob-lem is the TMULT routine. As for inhomogeneous scatterers, the individ-ual T -matrices of the particles are input parameters of the code and theymay correspond to homogeneous, axisymmetric or nonaxisymmetric particles

3.6 Multiple Particles 231
X
Z
n1
n2
O2 x2
z2
a1
b1
β2
x1
z1
O1 x20
z20
a2
b2
Fig. 3.49. Geometry of a system of two prolate spheroids
and inhomogeneous, composite or layered particles. The flow diagram of theTMULT routine is as in Fig. 3.34.
Figure 3.49 illustrates a system of two spheroids of semi-axes ksa1 =ksa2 = 4 and ksb1 = ksb2 = 2, and relative refractive indices mr1 = mr2 = 1.5.The Cartesian coordinates of the center of the second spheroid are ksx20 =ksz20 = 4
√2 and y20 = 0, while the Euler angles specifying the orientation of
the spheroids are chosen as αp1 = βp1 = 0 and αp2 = βp2 = 45. The firstcomputational step involves the calculation of the individual T -matrix of aspheroid by using the TAXSYM code, and for this calculation, the maximumexpansion and azimuthal orders are Nrank = 10 and Mrank = 4, respectively.The individual T -matrices are then used to compute the T -matrix of thespheroids with respect to the origin O1, and the dimension of the system T -matrix is given by Nrank = 20 and Mrank = 18. In Fig. 3.50, we show thedifferential scattering cross-sections computed with the TMULT routine andthe multiple multipole method. The scattering curves are in good agreement.
As a second example, we consider a system of five spherical particles illu-minated by a plane wave propagating along the Z-axis of the global coordinatesystem. The spheres are identical and have a radius of ksr = 2 and a relativerefractive index of mr = 1.5, while the length specifying the position of thespheres is ksl = 6 (Fig. 3.51). The system T -matrix is computed with respectto the origin O and is characterized by Nrank = 18 and Mrank = 16. Thescattering characteristics are computed with the TMULTSPH routine, andnumerical results are again presented in the form of the differential scatteringcross-sections. The curves plotted in Fig. 3.52 correspond to a fixed orientation

232 3 Simulation Results
10−5
10−4
10−3
10−2
10−1
100
101
DS
CS
0 60 120 180 240 300 360Scattering Angle (deg)
TMULT - parallelTMULT - perpendicularMMP - parallelMMP - perpendicular
Fig. 3.50. Normalized differential scattering cross-sections of a system of two prolatespheroids computed with the TMULT routine and the multiple multipole method(MMP)
X
Y
Z
l
l l
l
r
Fig. 3.51. Geometry of a system of five spheres
of the system of spheres (αp = βp = γp = 0) and are similar for the T -matrixand the multiple multipole solutions. For a random orientation, we computethe elements of the scattering matrix, and the results are shown in Figs. 3.53and 3.54 together with the results computed with the SCSMTM code devel-

3.6 Multiple Particles 233
10−5
10−4
10−3
10−2
10−1
100
101
DSC
S
0 60 120 180 240 300 360Scattering Angle (deg)
TMULTSPH - parallelTMULSPH - perpendicularMMP - parallelMMP - perpendicular
Fig. 3.52. Normalized differential scattering cross-sections of a system of fivespheres computed with the TMULT routine and the multiple multipole method(MMP)
10−3.0
10−2.0
10−1.0
100.0
101.0
Scat
terin
g M
atrix
Ele
men
ts
0 30 60 90 120 150 180Scattering Angle (deg)
F11 - TMULTSPHF11 - SCSMTMF22 - TMULTSPHF22 - SCSMTM
Fig. 3.53. Scattering matrix elements F11 and F22 of a system of five spherescomputed with the TMULT routine and the code SCSMTM of Mackowski andMishchenko [153]
oped by Mackowski and Mishchenko [153]. The curves are generally close toeach other.
Figure 3.55 illustrates a system of four identical spheres that can be usedto compare different routines. The radius of each spherical particle is ksr = 3and the relative refractive index is mr = 1.5. In the global coordinate system

234 3 Simulation Results
−0.03
−0.02
−0.01
0.00
0.01
Scat
terin
g M
atrix
Ele
men
ts
0 30 60 90 120 150 180Scattering Angle (deg)
F21 - TMULTSPHF21 - SCSMTMF43 - TMULTSPHF43 - SCSMTM
Fig. 3.54. Scattering matrix elements F21 and F43 of a system of five spherescomputed with the TMULT routine and the code SCSMTM of Mackowski andMishchenko [153]
OXY Z, two local coordinate systems O1x1y1z1 and O2x2y2z2 are defined,and the positions of the origins O1 and O2 are characterized by x01 = y01 =z01 = L and x02 = y02 = z02 = −L, respectively, where ksL = 6.5. Ineach local coordinate system, a system of two spheres is considered, and thedistance between the sphere centers is 2ksl = 3.5, while the Euler angles spec-ifying the orientation of the two-spheres system are αp1 = βp1 = 45 andαp2 = βp2 = 30. The Cartesian coordinates of the spheres are computedwith respect to the global coordinate system and the TMULTSPH routineis used to compute the scattering characteristics. The dimension of the T -matrix of the four-sphere system is given by Nrank = 21 and Mrank = 19. Asecond technique for analyzing this scattering geometry involves the compu-tation of the T -matrix of the two-sphere system by using the TMULT2SPHroutine. In this case, Nrank = 16 and Mrank = 5, and the T -matrix of the two-sphere system serves as input parameter for the TMULT routine. Figures 3.56and 3.57 illustrate the differential scattering cross-sections for a fixed (αp =βp = γp = 0) and a random orientation of the system of spheres. The far-fieldpatterns are reproduced very accurately by both methods.
To demonstrate the capabilities of the TMULTSPH routine we presentsome exemplary results for polydisperse aggregates. Monodisperse aggre-gates of small spherical particles are characterized by the number of primaryspherule N , the fractal dimension Df , the fractal pre-factor kf , the radius ofgyration Rg, and the radius of the primary spherules rp. These morphologicalparameters are related in the form of a scaling law

3.6 Multiple Particles 235
O
O2
O1
X
Z
x1
x2
z1
z2
β1
α 1
2lx1
z1
y1
r
O1
L
L
−L
−L
Fig. 3.55. Geometry of a system of four spheres
10−6
10−5
10−4
10−3
10−2
10−1
100
DS
CS
0 60 120 180 240 300 360Scattering Angle (deg)
TMATMULT - parallelTMATMULT - perpendicularTMATMULTSPH - parallelTMATMULTSPH - perpendicular
Fig. 3.56. Normalized differential scattering cross-sections of a system of fourspheres

236 3 Simulation Results
10−4
10−3
10−2
10−1
100
<D
SC
S>
0 30 60 90 120 150 180Scattering Angle (deg)
TMATMULT - parallelTMATMULT - perpendicularTMATMULTSPH - parallelTMATMULTSPH - perpendicular
Fig. 3.57. Averaged differential scattering cross-sections of a system of four spheres
N = kf
(Rg
rp
)Df
, (3.14)
where the radius of gyration is determined from the position of each primaryspherule ri to the geometrical center of the cluster r0,
R2g =
1N
N∑
i=1
|ri − r0|2
and r0 = (1/N)∑N
i=1 ri. Equation (3.14) is important because the values ofparameters are linked to real physical processes. If Df ≈ 1.8 the processbelongs to a diffusion limited aggregation and if Df ≈ 2.1 it belongs toa reaction limited aggregation. For simulating diffusion limited aggregation,we developed a Fortran program and used the Cartesian coordinates of thespherule as input parameters for the TMULTSPH routine. This program isbased on the fast algorithm described by Filippov et al. [66] and generatesaggregates by using two different methods. In the first method, each newprimary spherule will be stuck on the mother aggregate after touching oneof the existing spherules. This method is known as the diffusion limited al-gorithm (DLA) and is used for aggregates not larger than about N = 150spherules. With the second method, complete small aggregates are stuck onthe mother aggregate. The small aggregates are generated with the DLA al-gorithm and consists of about 20 or more primary spherules. This method iscalled diffusion limited cluster cluster aggregation (DLCCA) and gives morerealistic aggregates. An example of a monodisperse aggregate representing

3.6 Multiple Particles 237
Fig. 3.58. Monodisperse aggregate with Df = 1.8, N = 130 and rp = 10 nm
Fig. 3.59. Polydisperse aggregate with Df = 1.8, N = 203 and rp between 10 and20 nm
a soot particle from a combustion processes is shown in Fig. 3.58, while apolydisperse aggregate is shown in Fig. 3.59. For the monodisperse aggregate,the scattering characteristics are shown in Fig. 3.60, and the essential parame-ters controlling the convergence process are Nrank = 8 and Mrank = 6 for thesystem T -matrix, and Nrank = 4 and Mrank = 3 for the primary spherules. Thedifferential scattering cross-sections of the polydisperse aggregate are plottedin Fig. 3.61, and the parameters of calculation for the system T -matrix in-crease to Nrank = 12 and Mrank = 10. The program described above has beenused by Riefler et al. [204] to characterize soot from a flame by analyzing themeasured scattering patterns.

238 3 Simulation Results
10−6
10−5
10−4
10−3
10−2
10−1
DS
CS
0 30 60 90 120 150 180Scattering Angle (deg)
parallelperpendicular
Fig. 3.60. Normalized differential scattering cross-sections of a monodisperseaggregate
10−9
10−8
10−7
10−6
10−5
10−4
10−3
DS
CS
0 60 120 180 240 300 360Scattering Angle (deg)
parallelperpendicular
Fig. 3.61. Normalized differential scattering cross-sections of a polydisperseaggregate
3.7 Composite Particles
Electromagnetic scattering by axisymmetric, composite particles can be com-puted with the TCOMP routine. An axisymmetric, composite particle consistsof several nonenclosing, rotationally symmetric regions with a common axisof symmetry. In contrast to the TMULT routine, TCOMP is based on a for-malism which avoid the use of any local origin translation. The scattering

3.7 Composite Particles 239
z1
Ll
r
z3
x
z
Fig. 3.62. Geometry of a composite particle consisting of three identical cylinders
characteristics can be computed with localized or distributed sources, and theprogram supports calculations for dielectric particles. Particle geometries in-cluded in the library are half-spheroids with offset origins and three cylinders.
In Fig. 3.62, we show a composite particle consisting of three identicalcylinders of radius ksr = 2 and length ksl = 4. The axial positions of thefirst and third cylinder are given by ksz1 = 4 and ksz3 = −4, and the relativerefractive indices are chosen as mr1 = mr3 = 1.5 and mr2 = 1.0. Becausemr2 = 1.0, the scattering problem is equivalent to the multiple scatteringproblem of two identical cylinders. On the other hand, the composite particlecan be regarded as an inhomogeneous cylinder with a cylindrical inclusion.Therefore, the scattering characteristics are computed with three independentroutines: TCOMP, TMULT, and TLAY. Localized and distributed sources areused for T -matrix calculations with the TCOMP routine, while distributedsources are used for calculations with the TLAY routine. Figure 3.63 shows thedifferential scattering cross-sections for a fixed orientation of the compositeparticle (αp = βp = 45), while Fig. 3.64 illustrates the numerical results fora random orientation. The behavior of the far-field patterns are quite similar.
In order to demonstrate the capability of the code to compute the elec-tromagnetic scattering by composite particles with elongated and flattenedregions, we consider the geometry depicted in Fig. 3.65. For this application,the sources are distributed on the real and imaginary axes. The parametersspecifying the particle shape are: ksr = 1, ksR = 3, ksl = 6 and ksL = 7,while the relative refractive indices are identical mr1 = mr2 = mr3 = 1.5.For the prolate cylinders, Nrank = 10 sources are distributed along the axisof symmetry, and for the oblate cylinder, Nrank = 10 sources are distributed

240 3 Simulation Results
10−6
10−5
10−4
10−3
10−2
10−1
100
101
DS
CS
0 60 120 180 240 300 360Scattering Angle (deg)
TCOMP - localized sources - parallelTCOMP - localized sources - perpendicularTCOMP - distributed sources - parallelTCOMP - distributed sources - perpendicularTMULT - parallelTMULT - perpendicularTLAY - parallelTLAY - perpendicular
Fig. 3.63. Normalized differential scattering cross-sections of a composite particleconsisting of three identical cylinders
10−4
10−3
10−2
10−1
100
101
<DSC
S>
0 30 60 90 120 150 180Scattering Angle (deg)
TCOMP - localized sources - parallelTCOMP - localized sources - perpendicularTCOMP - distributed sources - parallelTCOMP - distributed sources - perpendicularTMULT - parallelTMULT - perpendicularTLAY - parallelTLAY - perpendicular
Fig. 3.64. Averaged differential scattering cross-sections of a composite particleconsisting of three identical cylinders
on the imaginary axis. The global number of integration points is Nint = 100.The differential scattering cross-sections are plotted in Fig. 3.66 for the caseof normal incidence.
Scattering by composite spheroids as shown in Fig. 3.67 can be computedwith localized and distributed sources. The results plotted in Fig. 3.68 corre-spond to a composite spheroid with ksa = 20, ksb = 5, ksz1 = ksz2 = 10 and

3.7 Composite Particles 241
z1
Ll
r
z3
x
z
R
Fig. 3.65. Geometry of a composite particle consisting of three cylinders
10−5
10−4
10−3
10−2
10−1
DSC
S
0 30 60 90 120 150 180Scattering Angle (deg)
TCOMP - parallelTCOMP - perpendicular
Fig. 3.66. Normalized differential scattering cross-sections of a composite particleconsisting of three cylinders

242 3 Simulation Results
z1
z2
x
z
a
b
Fig. 3.67. Geometry of a composite spheroid
10−5
10−4
10−3
10−2
10−1
100
101
DSC
S
0 60 120 180 240 300 360Scattering Angle (deg)
parallel - distributed sourcesparallel - localized sourcesperpendicular - distributed sourcesperpendicular - localized sources
Fig. 3.68. Normalized differential scattering cross-sections of a composite spheroid
mr1 = mr2 = 1.2, while the parameters controlling the T -matrix calculationare given in Table 3.7.
3.8 Complex Particles
In the following analysis we consider the inhomogeneous particle depicted inFig. 3.69. The host particle is a sphere with radius R = 1.0 µm and relative

3.8 Complex Particles 243
Table 3.7. Parameters of calculation for a composite spheroid
Type of sources Nrank-half-spheroid Nrank-composite particle Nint
Localized 22 34 1000
Distributed 18 32 1000
O1
O X
Z
O2
x1
x2
z2
z1
mr
mr1,1
mr1,2
mr2,1
mr2,2
Fig. 3.69. Geometry of an inhomogeneous sphere containing a composite and alayered spheroid as separate inclusions
refractive index mr = 1.2, while the wavelength of the incident radiation is λ =0.628 µm. The inhomogeneities are a composite and a layered prolate spheroid.The composite particle consists of two identical half-spheroids with semi-axesa1 = 0.3 µm and b1 = 0.2 µm, and relative refractive indices (with respectto the ambient medium) mr1,1 = 1.5 and mr1,2 = 1.33. The layered particleconsists of two concentric prolate spheroids with semi-axes a2,1 = 0.3 µm,b2,1 = 0.2 µm, and a2,2 = 0.15 µm, b2,2 = 0.1 µm, and relative refractiveindices mr2,1 = 1.5 and mr2,2 = 1.8. The position of the composite particlewith respect to the global coordinate system of the host particle is specified bythe Cartesian coordinates x1 = y1 = z1 = 0.3 µm, while the Euler orientationangles are αp1 = βp1 = 45. For the layered particle, we choose x2 = y2 =z2 = −0.3 µm and αp2 = βp2 = 0.
The results plotted in Fig. 3.70 are computed with the TMULT routineand show the differential scattering cross-sections for the two-spheroid system.The particles are placed in a medium with a refractive index of 1.2, and the

244 3 Simulation Results
10−6.00
10−5.00
10−4.00
10−3.00
10−2.00
10−1.00
DSC
S
0 60 120 180 240 300 360Scattering Angle (deg)
TMULT - parallelTMULT - perpendicular
Fig. 3.70. Normalized differential scattering cross-sections of a composite and alayered particle
10−6
10−5
10−4
10−3
10−2
10−1
100
101
102
DSC
S
0 60 120 180 240 300 360Scattering Angle (deg)
TINHOM - parallelTINHOM - perpendicular
Fig. 3.71. Normalized differential scattering cross-sections of an inhomogeneoussphere. The inclusion consists of a composite and a layered particle
dimension of the system T -matrix is given by Nrank = 14 and Mrank = 12.The incident wave travel along the Z-axis of the global coordinate systemand the angular scattering is computed in the azimuthal plane ϕ = 0. Thesystem T -matrix serves as input parameter for the TINHOM routine. Theresulting T -matrix is characterized by Nrank = 16 and Mrank = 14, andcorresponds to a sphere containing a composite and a layered spheroid asseparate inclusions. Figure 3.71 illustrates the differential scattering cross-sections for the inhomogeneous sphere in the case of normal incidence.

3.9 Particle on or Near a Plane Surface 245
3.9 Particle on or Near a Plane Surface
In this section, we present scattering results for an axisymmetric particlesituated on or near a plane surface. For this purpose we use the TPARTSUBroutine and a computer program based on the discrete sources method [59,60].
Figures 3.72–3.74 show the differential scattering cross-sections for Fe-,Si- and SiO-spheroids with semi-axes a = 0.05 µm and b = 0.025 µm. Therelative refractive indices are: mr = 1.35 + 1.97j for Fe, mr = 4.37 + 0.08j for
10−6
10−5
10−4
10−3
10−2
10−1
100
101
DSC
S
90 120 150 180 210 240 270Scattering Angle (deg)
TPARTSUB - parallelTPARTSUB - perpendicularDSM - parallelDSM - perpendicular
Fig. 3.72. Normalized differential scattering cross-sections of a Fe-spheroid com-puted with the TPARTSUB routine and the discrete sources method (DSM)
10−6
10−5
10−4
10−3
10−2
10−1
100
101
DSC
S
90 120 150 180 210 240 270Scattering Angle (deg)
TPARTSUB - parallelTPARTSUB - perpendicularDSM - parallelDSM - perpendicular
Fig. 3.73. Normalized differential scattering cross-sections of a Si-spheroid com-puted with the TPARTSUB routine and the discrete sources method (DSM)

246 3 Simulation Results
10−6
10−5
10−4
10−3
10−2
10−1
100
101
DSC
S
90 120 150 180 210 240 270Scattering Angle (deg)
TPARTSUB - parallelTPARTSUB - perpendicularDSM - parallelDSM - perpendicular
Fig. 3.74. Normalized differential scattering cross-sections of a SiO-spheroid com-puted with the TPARTSUB routine and the discrete sources method (DSM)
Si, and mr = 1.67 for SiO. The particles are situated on a silicon substrate,the wavelength of the incident radiation is λ = 0.488 µm, and the incidentangle is β0 = 45. The plotted data show that the T -matrix method leads toaccurate results.
In the next example, we investigate scattering of evanescent waves byparticles situated on a glass prism. We note that evanescent wave scatteringis important in various sensor applications such as the total internal reflectionmicroscopy TIRM [195]. Choosing the wavelength of the external excitationas λ = 0.488 µm and taking into account that the glass prism has a refractiveindex of mrs = 1.5, we deduce that the evanescent waves appear for incidentangles exceeding 41.8. In Figs. 3.75–3.77, we plot the differential scatteringcross-section for Ag-, diamond-, and Si-spheres with a diameter of d = 0.2 µm.The relative refractive indices of Ag- and diamond particles are mr = 0.25 +3.14j and mr = 2.43, respectively. The scattering plane coincides with theincident plane and the angle of incidence is β0 = 60. The plotted data showa good agreement between the discrete sources and the T -matrix solutions.
3.10 Effective Medium Model
The effective wave number of a half-space with randomly distributed spher-oidal particles can be computed with the EFMED routine.
First we consider spherical particles and compare our results to the solu-tions obtained with the Matlab program QCAMIE included in the Electro-

3.10 Effective Medium Model 247
10−5
10−4
10−3
10−2
10−1
100
101
DSC
S
90 120 150 180 210 240 270Scattering Angle (deg)
TPARTSUB - parallelTPARTSUB - perpendicularDSM - parallelDSM - perpendicular
Fig. 3.75. Normalized differential scattering cross-sections of a metallic Ag-spherecomputed with the TPARTSUB routine and the discrete sources method (DSM)
10−5
10−4
10−3
10−2
10−1
100
101
DSC
S
90 120 150 180 210 240 270Scattering Angle (deg)
TPARTSUB - parallelTPARTSUB - perpendicularDSM - parallelDSM - perpendicular
Fig. 3.76. Normalized differential scattering cross-sections of a Diamond-spherecomputed with the TPARTSUB routine and the discrete sources method (DSM)
magnetic Wave Matlab Library and available from www.emwave.com. Thislibrary contains several Matlab programs which are based on the theory givenin the book of Tsang et al. [229]. Figures 3.78 and 3.79 show the normalizedphase velocity ks/ReKs and the effective loss tangent 2ImKs/ReKs asfunctions of the size parameter x = ksR, and it is apparent that no substantialdifferences between the curves exist.

248 3 Simulation Results
10−5
10−4
10−3
10−2
10−1
100
101
DSC
S
90 120 150 180 210 240 270Scattering Angle (deg)
TPARTSUB - parallelTPARTSUB - perpendicularDSM - parallelDSM - perpendicular
Fig. 3.77. Normalized differential scattering cross-sections of a Si-sphere computedwith the TPARTSUB routine and the discrete sources method (DSM)
0.84
0.85
0.86
0.87
0.88
0.89
Pha
se V
eloc
ity
0.0 0.5 1.0 1.5 2.0 2.5
Size Parameter
EFMEDQCAMIE
Fig. 3.78. Normalized phase velocity versus size parameter computed with theEFMED routine and the Matlab program QCAMIE
Next we consider the test examples given by Neo et al. [179] and comparethe T -matrix results to the solutions obtained with the long-wavelength quasi-crystalline approximation
K2s = k2
s
1 +3c εr−1
εr+2
1 − c εr−1εr+2
[
1 + j2x3
3
εr−1εr+2
1 − c εr−1εr+2
(1 − c)4
(1 + 2c)2
]

3.10 Effective Medium Model 249
0.0
0.1
0.2
0.3
0.4
Effe
ctiv
e Lo
ss T
ange
nt
0.0 0.5 1.0 1.5 2.0 2.5Size Parameter
EFMEDQCAMIE
Fig. 3.79. Effective loss tangent versus size parameter computed with the EFMEDroutine and the Matlab program QCAMIE
and the quasi-crystalline approximation with coherent potential [118],
K2s = k2
s
⎧⎨
⎩1 +
c (εr − 1)
1 + k2s (εr−1)3K2
s(1 − c)
×
⎡
⎣1 + j2Ksk
2s R
3
9εr − 1
1 + k2s (εr−1)3K2
s(1 − c)
(1 − c)4
(1 + 2c)2
⎤
⎦
⎫⎬
⎭.
Figure 3.80 shows plots of ImKs/k0 versus concentration for spherical parti-cles of radius a = 3.977 ·10−3 µm and relative refractive index (with respect tothe ambient medium) mr = 1.194. The wave number in free space is k0 = 10,while the refractive index of the ambient medium is m = 1.33.
In Fig. 3.81 we plot ImKs/k0 versus concentration for a = 1.047 ·10−2 µm, mr = 1.789 and m = 1.0. Computed results using the T -matrixmethod agree with the quasi-crystalline approximation. It should be observedthat both the quasi-crystalline approximation and the quasi-crystalline ap-proximation with coherent potential do predict maximum wave attenuationat a certain concentration.
In Figs. 3.82 and 3.83, we show calculations of ReKs and ImKs asfunctions of the size parameter x = ks maxa, b for oblate and prolate spher-oids. The spheroids are assumed to be oriented with their axis of symmetryalong the Z-axis or to be randomly oriented. Since the incident wave is alsoassumed to propagate along the Z-axis, the medium is not anisotropic and ischaracterized by a single wave number Ks. The axial ratios are a/b = 0.66 foroblate spheroids and a/b = 1.5 for prolate spheroids. As before, the fractional

250 3 Simulation Results
10−5.0
10−4.0
10−3.0
Im(K
/k)
0.0 0.5 1.0 1.5 2.0 2.5 3.0
Concentration
EFMED (T-Matrix Multiple Scattering Theory)QCAQCA - CP
Fig. 3.80. ImKs/k0 for a = 3.977 · 10−3 µm, mr = 1.194 and m = 1.33. Theresults are computed with the T -matrix method, quasicrystalline approximation(QCA) and quasicrystalline approximation with coherent potential (QCA-CP)
10−6.0
10−5.0
10−4.0
Im(K
/k)
0.0 0.5 1.0 1.5 2.0 2.5 3.0Concentration
EFMED (T-Matrix Multiple Scattering Theory)QCAQCA - CP
Fig. 3.81. ImKs/k0 for a = 1.047 · 10−2 µm, mr = 1.789 and m = 1.0. Theresults are computed with the T -matrix method, quasicrystalline approximation(QCA) and quasicrystalline approximation with coherent potential (QCA-CP)
concentration is c = 0.2 and the relative refractive index of the particles ismr = 1.789. The significant feature in Fig. 3.82 is the occurrence of a maximumin ReKs at x = 1.6 for spherical particles. In the low-frequency regime up tox = 0.5, the ImKs curves increase rapidly with x and then show a smooth

3.10 Effective Medium Model 251
10.4
10.8
11.2
11.6
12.0
12.4
Re(
K)
0.0 0.4 0.8 1.2 1.6 2.0
Size Parameter
sphereoblate - fixed orientationoblate - random orientationprolate - fixed orientationprolate - random orientation
Fig. 3.82. ReKs versus the size parameter x = ks maxa, b for oblate and pro-late spheroids with a/b = 0.66 and a/b = 1.5, respectively. The calculations areperformed for c = 0.2, mr = 1.789 and m = 1.0
10−5.0
10−4.0
10−3.0
10−2.0
10−1.0
100.0
Im(K
)
0.0 0.4 0.8 1.2 1.6 2.0Size Parameter
sphereoblate - fixed orientationoblate - random orientationprolate - fixed orientationprolate - random orientation
Fig. 3.83. ImKs versus the size parameter x = ks maxa, b for oblate and prolatespheroids. The parameters of calculation are as in Fig. 3.82
increase with x. Note that for a given size parameter x, the radius of a spher-ical particle is larger than the equal-volume-sphere radii of an oblate and aprolate spheroid, and this feature is reflected in the variations of ReKs andImKs.

A
Spherical Functions
In this appendix we recall the basic properties of the solutions to the Besseland Legendre differential equations and discuss some computational aspects.Properties of spherical Bessel and Hankel functions and (associated) Legendrefunctions can be found in [1, 40,215,238].
In a source-free isotropic medium the electric and magnetic fields satisfythe equations
∇×∇× X − k2X = 0,
∇ · X = 0,
where X stands for E or H. Since
∇×∇× X = −∆X + ∇ (∇ · X) ,
we see that X satisfies the vector wave equation
∆X + k2X = 0
and we deduce that each component of X satisfies the scalar wave equationor the Helmholtz equation
∆u + k2u = 0.
The Helmholtz equation written in spherical coordinates as
1r2
∂
∂r
(r2 ∂u
∂r
)+
1r2 sin θ
∂
∂θ
(sin θ
∂u
∂θ
)+
1r2 sin2 θ
∂2u
∂ϕ2+ k2u = 0
is separable, so that upon replacing
u(r) = f1(r)Y (θ, ϕ) ,

254 A Spherical Functions
where (r, θ, ϕ) are the spherical coordinates of the position vector r, we obtain
r2f ′′1 + 2rf ′
1 +[k2r2 − n(n + 1)
]f1 = 0, (A.1)
1sin θ
∂
∂θ
(sin θ
∂Y
∂θ
)+
1sin2 θ
∂2Y
∂ϕ2+ n(n + 1)Y = 0. (A.2)
The above equations are known as the Bessel differential equation and thedifferential equation for the spherical harmonics. Further, setting
Y (θ, ϕ) = f2(θ)f3 (ϕ) ,
we find that
1sin θ
ddθ
(sin θ
df2
dθ
)+[n(n + 1) − m2
sin2 θ
]f2 = 0, (A.3)
f ′′3 + m2f3 = 0. (A.4)
The differential equation (A.3) is known as the associated Legendre equation,while the solution to the differential equation (A.4) is f3(ϕ) = exp(jmϕ).
A.1 Spherical Bessel Functions
With the substitution x = kr, the spherical Bessel differential equation canbe written in the standard form
x2f ′′(x) + 2xf ′(x) +[x2 − n(n + 1)
]f(x) = 0 .
For n = 0, 1, . . . , the functions
jn(x) =∞∑
p=0
(−1)pxn+2p
2pp!(2n + 2p + 1)!!
and
yn(x) = − (2n)!2nn!
∞∑
p=0
(−1)px2p−n−1
2pp! (−2n + 1) (−2n + 3) · · · (−2n + 2p − 1), (A.5)
where 1 · 3 · · · (2n + 2p + 1) = (2n + 2p + 1)!!, are solutions to the sphericalBessel differential equation (the first coefficient in the series (A.5) has to beset equal to one). The functions jn and yn are called the spherical Bessel andNeumann functions of order n, respectively, and the linear combinations
h(1,2)n = jn ± jyn
are known as the spherical Hankel functions of the first and second kind. Fromthe series representations we see that

A.1 Spherical Bessel Functions 255
2n + 1x
zn(x) = zn−1(x) + zn+1(x), (A.6)
(2n + 1) z′n(x) = nzn−1(x) − (n + 1)zn+1(x), (A.7)
andddx
[xzn(x)] = xzn−1(x) − nzn(x), (A.8)
where zn stands for any spherical function. The Wronskian relation for thespherical Bessel and Neumann functions is
jn(x)y′n(x) − j′n(x)yn(x) =
1x2
and for small values of the argument we have
jn(x) =xn
(2n + 1)!!1 + O
(x2)
,
yn(x) = − (2n − 1)!!xn+1
1 + O
(x2)
as x → 0, while for large value of the argument,
jn(x) =1x
cos[x − (n + 1)π
2
]1 + O
(1x
),
yn(x) =1x
sin[x − (n + 1)π
2
]1 + O
(1x
),
h(1)n (x) =
ej[x−(n+1)π/2]
x
1 + O
(1x
),
h(2)n (x) =
e−j[x−(n+1)π/2]
x
1 + O
(1x
)
as x → ∞.Spherical Bessel functions can be expressed in terms of trigonometric func-
tions, and the first few spherical functions have the explicit forms
j0(x) =sinx
x, (A.9)
y0(x) = −cos x
x, (A.10)
j1(x) =sinx
x2− cos x
x, (A.11)
y1(x) = −cos x
x2− sin x
x, (A.12)

256 A Spherical Functions
and
h(1)0 (x) =
ejx
jx,
h(2)0 (x) = −e−jx
jx.
The spherical Bessel functions are computed by downward recursion. Thisrecursion begins with two successive functions of small values and producesfunctions proportional to the Bessel functions rather than the actual Besselfunctions. The constant of proportionality between the two sets of functions isobtained from the function of order zero j0. Alternatively, the spherical Besselfunctions can be computed with an algorithm involving the auxiliary functionχn [169]
χn(x) =jn(x)
jn−1(x).
In this case, the functions χn are calculated with the downward recurrencerelation
χn(x) =1
2n+1x − χn+1(x)
,
the constant of proportionality is obtained from the function of order one,χ1(x) = 1/x − cot x, and the spherical Bessel functions are computed withthe upward recursion
jn(x) = χn(x)jn−1(x)
starting at j1. The spherical Neumann functions are calculated by upwardrecursion starting with the functions of order zero and one, y0 and y1, respec-tively.
A.2 Legendre Functions
With the substitution x = cos θ, the associated Legendre equation trans-forms to
(1 − x2
)f ′′(x) − 2xf ′ (x) +
[n(n + 1) − m2
1 − x2
]f (x) = 0. (A.13)
This equation is characterized by regular singularities at the points x = ±1and at infinity. For m = 0, there are two linearly independent solutions to theLegendre differential equation and these solutions can be expressed as powerseries about the origin x = 0. In general, these series do not converge for

A.2 Legendre Functions 257
x = ±1, but if n is a positive integer, one of the series breaks off after a finitenumber of terms and has a finite value at the poles. These polynomial solutionsare called Legendre polynomials and are denoted by Pn(x). For m = 0, thesolutions to (A.13) which are finite at the poles x = ±1 are the associatedLegendre functions. If m and n are integers, the associated Legendre functionsare defined as
Pmn (x) =
(1 − x2
)m/2 dmPn(x)dxm
.
Useful recurrence relations satisfied by Pmn are
(2n + 1) xPmn (x) = (n − m + 1) Pm
n+1(x) + (n + m) Pmn−1(x),
(A.14)
(2n + 1)√
1 − x2Pmn (x) = (n + m − 1) (n + m) Pm−1
n−1 (x) (A.15)
− (n − m + 1) (n − m + 2) Pm−1n+1 (x),
(2n + 1)√
1 − x2Pm−1n (x) = Pm
n+1(x) − Pmn−1 (cos θ) , (A.16)
(2n + 1)(1 − x2
) ddx
Pmn (x) = (n + 1) (n + m) Pm
n−1 (x)
−n (n − m + 1) Pmn+1(x), (A.17)
(1 − x2
) ddx
Pmn (x) = (n + m)Pm
n−1 (x) − nxPmn (x). (A.18)
The angular functions πmn and τm
n are related to the associated Legendrefunctions by the relations
πmn (θ) =
Pmn (cos θ)sin θ
, (A.19)
τmn (θ) =
ddθ
Pmn (cos θ). (A.20)
For positive values of m and for θ → 0 or θ → π,
Pmn (cos θ) → (n + m)!
(n − m)!
(2
2n + 1
)m
Jm
(2n + 1
2θ
)
and
mπmn (θ) → 1
2(n + m)!
(n − m)!(m − 1)!
(θ
2
)m−1
,
τmn (θ) → 1
2(n + m)!
(n − m)!(m − 1)!
(θ
2
)m−1
,

258 A Spherical Functions
while for n 1 and away from θ = 0 and θ = π, we have
Pmn (cos θ) →
(2π
) 12
(sin θ)−12 nm− 1
2 cos(
2n + 12
θ +mπ
2− π
4
)
and
πmn (θ) →
(2π
) 12
(sin θ)−32 nm− 1
2 cos(
2n + 12
θ +mπ
2− π
4
),
τmn (θ) →
(2π
) 12
(sin θ)−12 nm+ 1
2 sin(
2n + 12
θ +mπ
2− π
4
).
In our analysis we use the associated Legendre functions with positive valuesof the index m. For m ≥ 0, the normalized associated Legendre functions aregiven by
Pmn (cos θ) = cmnPm
n (cos θ), (A.21)
where cmn is a normalization constant and
cmn =
√2n + 1
2· (n − m)!(n + m)!
.
Similarly, the normalized angular functions πmn and τm
n are related to theangular functions πm
n and τmn by the relations
πmn (θ) = cmnπm
n (θ), (A.22)
τmn (θ) = cmnτm
n (θ) . (A.23)
An algorithm for computing the normalized associated Legendre functionsPm
n involves the following steps.
(1) For m = 0, compute Pn+1 by using the recurrence relation
Pn+1(cos θ) =1
n + 1
√(2n + 1)(2n + 3) cos θPn(cos θ)
− n
n + 1
√2n + 32n − 1
Pn−1(cos θ) , n ≥ 1
with the starting values
P0(cos θ) =√
22
,
P1(cos θ) =
√32
cos θ.

A.2 Legendre Functions 259
(2) For m ≥ 1, compute Pmn+1 by using the recurrence relation
Pmn+1(cos θ) =
√(2n + 1)(2n + 3)
(n + 1 − m)(n + 1 + m)cos θPm
n (cos θ)
−√
(2n + 3)(n − m)(n + m)(2n − 1)(n + 1 − m)(n + 1 + m)
Pmn−1(cos θ), n ≥ m
with the initial values
Pm−1m (cos θ) = 0,
Pmm (cos θ) =
√2m + 12 (2m)!
(2m − 1)!! sinm θ.
Considering the angular functions πmn , we see that π0
n diverges at θ = 0 andθ = π. Because in our applications, the product mπm
n appears explicitly, we setπ0
n = 0 for n ≥ 0. For m ≥ 1, the angular functions πmn are computed by using
(A.19), (A.21) and (A.22), and the recurrence relations for the normalizedassociated Legendre functions.
The angular functions τmn can be calculated with the following algorithm.
(1) For m = 0, compute
dd cos θ
Pn (cos θ) = P ′n (cos θ)
by using the recurrence relation
P ′n(cos θ) = n
√2n + 12n − 1
Pn−1(cos θ) +
√2n + 12n − 1
cos θP ′n−1(cos θ)
with the starting value
P ′0 (cos θ) = 0,
and set [144]
τ0n(θ) = − sin θP ′
n (cos θ) , n ≥ 0 .
(2) For m ≥ 1, compute τmn with the recurrence relation
τmn (θ) = n cos θπm
n (θ) − (n + m)
√(2n + 1)(n − m)(2n − 1)(n + m)
πmn−1(θ), n ≥ m.

260 A Spherical Functions
The following orthogonality relations are important for solving scatteringproblems:
∫ π
0
Pmn (cos θ)Pm
n′ (cos θ) sin θ dθ = δnn′ ,
∫ π
0
[τmn (θ)τm
n′ (θ) + m2πmn (θ)πm
n′(θ)]sin θ dθ = n(n + 1)δnn′ ,
∫ π
0
[πmn (θ)τm
n′ (θ) + τmn (θ)πm
n′(θ)] sin θ dθ = 0.
For negative arguments we have the symmetry relation
Pmn (− cos θ) = (−1)n−mPm
n (cos θ)
and consequently,
πmn (π − θ) = (−1)n−mπm
n (θ), (A.24)
τmn (π − θ) = (−1)n−m+1τm
n (θ). (A.25)

B
Wave Functions
In this appendix, we summarize the basic properties of the characteristic so-lutions to the scalar and vector wave equations. We recall the integral andorthogonality relations, and the addition theorems under coordinate rotationsand translations.
B.1 Scalar Wave Functions
The spherical wave functions form a set of characteristic solutions to theHelmholtz equation and are given by [215]
u1,3mn (kr) = z1,3
n (kr) P |m|n (cos θ) ejmϕ,
where n = 0, 1, . . . ,, m = −n, . . . , n, (r, θ, ϕ) are the spherical coordinates ofthe position vector r, z1
n designates the spherical Bessel functions jn, z3n stands
for the spherical Hankel functions of the first-order h(1)n , and P
|m|n denotes the
normalized associated Legendre functions. u1mn is an entire solution to the
Helmholtz equation (solution which are defined in all of R3) and u3mn is a
radiating solution to the Helmholtz equation in R3 − 0.The Green function or the fundamental solution is defined as
g (k, r, r′) =ejk|r−r′|
4π |r − r′| , r = r′
and straightforward differentiation shows that for fixed r′ ∈ R3, the funda-mental solution satisfies the Helmholtz equation in R3 −r′. The expansionof the Green function in terms of spherical wave functions is given by
g (k, r, r′) =jk2π
∞∑
n=0
n∑
m=−n
u3−mn (kr′) u1
mn (kr) ,
u1−mn (kr′) u3
mn (kr) ,
r < r′
r > r′.

262 B Wave Functions
The spherical harmonics are defined as
Ymn (θ, ϕ) = P |m|n (cos θ) ejmϕ
and they satisfy the orthogonality relation∫ 2π
0
∫ π
0
Ymn (θ, ϕ) Ym′n′ (θ, ϕ) sin θ dθ dϕ = 2πδm,−m′δnn′ .
The spherical wave functions can be expressed as integrals over plane waves[26,70,215]
u1mn(kr) =
14πjn
∫ 2π
0
∫ π
0
Ymn (β, α) ejk(β,α)·r sinβ dβ dα (B.1)
and
u3mn(kr) =
12πjn
∫ 2π
0
∫ π2 −j∞
0
Ymn (β, α) ejk(β,α)·r sinβ dβ dα, (B.2)
where (k, β, α) are the spherical coordinates of the wave vector k. We notethat (B.2) is valid for z > 0 since only then the integral converges.
The spherical wave expansion of the plane wave exp(jk ·r) is of significantimportance in electromagnetic scattering and is given by [215]
P (k, β, α, r) = ejk(β,α)·r =∞∑
n=0
n∑
m=−n
2jnY−mn (β, α) u1mn(kr). (B.3)
The quasi-plane waves have been introduced by Devaney [46], and for z > 0,they are defined as
Q(k, β, α, r) =∫ 2π
0
∫ π2 −j∞
0
∆(β, α, β′, α′)ejk′(β′,α′)·r sin β′ dβ′ dα′,
where
∆(β, α, β′, α′) =12π
∞∑
n=0
n∑
m=−n
Y−mn (β, α) Ymn (β′, α′) .
If β and β′ belong to [0, π], the expression of ∆ simplifies to
∆(β, α, β′, α′) = δ(cos β′ − cos β)δ(α′ − α).
As in (B.3), the expansion of quasi-plane waves in terms of radiating sphericalwave functions is given by
Q(k, β, α, r) =∞∑
n=0
n∑
m=−n
jnY−mn (β, α) u3mn(kr). (B.4)

B.1 Scalar Wave Functions 263
The function ∆ allows to formally analytically continue a function f(β, α),defined for real β, onto the complex values of β. In particular we see that
f(β, α) =∫ 2π
0
∫ π
0
f (β′, α′) ∆(β, α, β′, α′) sin β′ dβ′ dα′,
where β can assume all values lying on the contour [0, π2 − j∞), and therefore
∫ 2π
0
∫ π2 −j∞
0
f(β, α)ejk(β,α)·r sinβ dβ dα
=∫ 2π
0
∫ π
0
f(β, α)Q(k, β, α, r) sin β dβ dα, (B.5)
where we have used the definition of Q. In view of (B.2) and (B.5), we deducethat the integral representation for the radiating spherical wave functions isgiven by
u3mn(kr) =
12πjn
∫ 2π
0
∫ π
0
Ymn (β, α) Q(k, β, α, r) sin β dβ dα. (B.6)
In the far-field region, a plane wave can be expressed as a superposition ofincoming and outgoing spherical waves. To derive this expression, we startwith the series representation (B.3) written as
P (k, β, α, r) = ejk(β,α)·r =∞∑
n=0
n∑
m=−n
2jnjn(kr)Y−mn (β, α) Ymn(θ, ϕ),
use the asymptotic behavior of the spherical Bessel functions for large valuesof the argument
jn (kr) =1kr
sin(kr − nπ
2
)
=1
2jkr
[ej(kr−nπ
2 ) − e−j(kr−nπ2 )], kr → ∞
take into account the completeness relations for spherical harmonics,
δ (er − ek) = δ(ϕ − α)δ(cos θ − cos β)
=12π
∞∑
n=0
n∑
m=−n
Y−mn (β, α) Ymn (θ, ϕ) ,
δ (er + ek) = δ [(π + ϕ) − α] δ [cos (π − θ) − cos β]
=12π
∞∑
n=0
n∑
m=−n
(−1)nY−mn (β, α) Ymn (θ, ϕ) ,

264 B Wave Functions
where er and ek are the unit vectors in the directions of r and k, respectively,and obtain
ejk·r =2π
jkr
[δ (er − ek) ejkr − δ (er + ek) e−jkr
], kr → ∞. (B.7)
The vector spherical harmonics are defined as [175,228,229]
mmn(θ, ϕ) =1
√2n(n + 1)
[jmπ|m|
n (θ)eθ − τ |m|n (θ)eϕ
]ejmϕ, (B.8)
nmn(θ, ϕ) =1
√2n(n + 1)
[τ |m|n (θ)eθ + jmπ|m|
n eϕ
]ejmϕ, (B.9)
where (er,eθ,eϕ) are the spherical unit vectors of the position vector r, andwe have er ×mmn = nmn and er ×nmn = −mmn. We omit the third vectorspherical harmonics
pmn(θ, ϕ) =1
√2n(n + 1)
Ymn(θ, ϕ)er
since it will be not encountered in our analysis. The orthogonality relationsfor vector spherical harmonics are
∫ 2π
0
∫ π
0
mmn(θ, ϕ) · mm′n′(θ, ϕ) sin θ dθ dϕ
=∫ 2π
0
∫ π
0
nmn(θ, ϕ) · nm′n′(θ, ϕ) sin θ dθ dϕ = πδm,−m′δnn′ , (B.10)
and ∫ 2π
0
∫ π
0
mmn(θ, ϕ) · nm′n′(θ, ϕ) sin θdθ dϕ = 0 . (B.11)
The system of vector spherical harmonics is orthogonal and complete inL2
tan(Ω) (the space of square integrable tangential fields defined on the unitsphere Ω) and in terms of the scalar product in L2
tan(Ω) we have
∫ 2π
0
∫ π
0
mmn(θ, ϕ) · m∗m′n′(θ, ϕ) sin θ dθ dϕ
=∫ 2π
0
∫ π
0
nmn(θ, ϕ) · n∗m′n′(θ, ϕ) sin θ dθ dϕ = πδmm′δnn′ (B.12)
and ∫ 2π
0
∫ π
0
mmn(θ, ϕ) · n∗m′n′(θ, ϕ) sin θ dθ dϕ = 0. (B.13)

B.2 Vector Wave Functions 265
We define the vector spherical harmonics of left- and right-handed type as
lmn(θ, ϕ) =1√2
[mmn(θ, ϕ) + jnmn(θ, ϕ)] (B.14)
=j
2√
n(n + 1)
[mπ|m|
n (θ) + τ |m|n (θ)
](eθ + jeϕ)ejmϕ
and
rmn(θ, ϕ) =1√2
[mmn(θ, ϕ) − jnmn(θ, ϕ)] (B.15)
=j
2√
n(n + 1)
[mπ|m|
n (θ) − τ |m|n (θ)
](eθ − jeϕ)ejmϕ,
respectively, and it is straightforward to verify the orthogonality relations
∫ 2π
0
∫ π
0
lmn(θ, ϕ) · l∗m′n′(θ, ϕ) sin θ dθ dϕ
=∫ 2π
0
∫ π
0
rmn(θ, ϕ) · r∗m′n′(θ, ϕ) sin θ dθ dϕ = πδmm′δnn′ (B.16)
and∫ 2π
0
∫ π
0
lmn(θ, ϕ) · r∗m′n′(θ, ϕ) sin θ dθ dϕ = 0. (B.17)
Since lmn and rmn are linear combinations of mmn and nmn, we deduce thatthe system of vector spherical harmonics of left- and right-handed type is alsoorthogonal and complete in L2
tan(Ω).
B.2 Vector Wave Functions
The independent solutions to the vector wave equations can be constructedas [215]
M1,3mn(kr) =
1√
2n(n + 1)∇u1,3
mn(kr) × r,
N1,3mn(kr) =
1k∇× M1,3
mn(kr),
where n = 1, 2, ..., and m = −n, ..., n. The explicit expressions of the vectorspherical wave functions are given by

266 B Wave Functions
M1,3mn(kr) =
1√
2n(n + 1)z1,3
n (kr)[jmπ|m|
n (θ)eθ − τ |m|n (θ)eϕ
]ejmϕ,
N1,3mn(kr) =
1√
2n(n + 1)
n(n + 1)
z1,3n (kr)
krP |m|
n (cos θ)er
+
[krz1,3
n (kr)]′
kr
[τ |m|n (θ)eθ + jmπ|m|
n (θ)eϕ
]
ejmϕ,
where
[krz1,3
n (kr)]′
=d
d (kr)[krz1,3
n (kr)].
The superscript ‘1’ stands for the regular vector spherical wave functions whilethe superscript ‘3’ stands for the radiating vector spherical wave functions. Itis useful to note that for n = m = 0, we have M1,3
00 = N1,300 = 0. M1
mn, N1mn
is an entire solution to the Maxwell equations and M3mn, N3
mn is a radiatingsolution to the Maxwell equations in R3 − 0.
The vector spherical wave functions can be expressed in terms of vectorspherical harmonics as follows:
M1,3mn(kr) = z1,3
n (kr)mmn(θ, ϕ),
N1,3mn(kr) =
√n(n + 1)
2z1,3
n (kr)kr
Ymn (θ, ϕ) er +
[krz1,3
n (kr)]′
krnmn(θ, ϕ),
In the far-field region, the asymptotic behavior of the spherical Hankel func-tions for large value of the argument yields the following representations forthe radiating vector spherical wave functions [40]:
M3mn(kr) =
ejkr
kr
(−j)n+1
mmn(θ, ϕ) + O
(1r
), r → ∞,
N3mn(kr) =
ejkr
kr
j (−j)n+1
nmn(θ, ϕ) + O
(1r
), r → ∞.
The orthogonality relations on a sphere Sc, of radius R, are∫
Sc
[er × Mmn(kr)] · [er × Mm′n′(kr)] dS(r) = πR2z2n(kR)δm,−m′δnn′ ,
∫
Sc
[er × Nmn(kr)] · [er × Nm′n′(kr)] dS(r) = πR2
[kRzn(kR)]′
kR
2
×δm,−m′δnn′ ,

B.2 Vector Wave Functions 267
and∫
Sc
[er × Mmn(kr)] · [er × Nm′n′(kr)] dS(r) = 0,
and we also have∫
Sc
[er × Mmn(kr)] · Nm′n′(kr)dS (r)
= −∫
Sc
[er × Nmn(kr)] · Mm′n′(kr)dS (r)
= πR2zn(kR)[kRzn(kR)]′
kRδm,−m′δnn′ (B.18)
and∫
Sc
[er × Mmn(kr)] · Mm′n′(kr)dS (r)
=∫
Sc
[er × Nmn(kr)] · Nm′n′(kr)dS (r) = 0. (B.19)
The spherical vector wave expansion of the dyad gI is of basic importance inour analysis and is given by [175,228,229]
g(k, r, r′)I
=jkπ
∞∑
n=1
n∑
m=−n
⎧⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎩
[M3
−mn(kr′)M1mn(kr) + N3
−mn(kr′)N1mn(kr)
]
+Irrotational terms , r < r′
[M1
−mn(kr′)M3mn(kr) + N1
−mn(kr′)N3mn(kr)
]
+Irrotational terms , r > r′
(B.20)
Using the calculation rules for dyadic functions and the identity ag = a · gI,we find the following simple but useful expansions
∇× [a(r′)g(k, r, r′)]
=jk2
π
∞∑
n=1
n∑
m=−n
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
[a(r′) · M3
−mn(kr′)]N1
mn(kr)
+[a(r′) · N3
−mn(kr′)]M1
mn(kr)
, r < r′
[a(r′) · M1
−mn(kr′)]N3
mn(kr)
+[a(r′) · N1
−mn(kr′)]M3
mn(kr)
, r > r′
(B.21)

268 B Wave Functions
and
∇×∇× [a(r′)g(k, r, r′)]
=jk3
π
∞∑
n=1
n∑
m=−n
⎧⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎩
[a(r′) · M3
−mn(kr′)]M1
mn(kr)
+[a(r′) · N3
−mn(kr′)]N1
mn(kr)
, r < r′
[a(r′) · M1
−mn(kr′)]M3
mn(kr)
+[a(r′) · N1
−mn(kr′)]N3
mn(kr)
, r > r′
(B.22)
Relying on these expansions and using the Stratton–Chu representation the-orem, orthogonality relations of vector spherical wave functions on arbitrarilyclosed surfaces can be derived. Let Di be a bounded domain with bound-ary S and exterior Ds, and let n be the unit normal vector to S directedinto Ds. The wave number in the domain Ds is denoted by ks, while thewave number in the domain Di is denoted by ki. For r ∈ Di, application ofStratton–Chu representation theorem to the vector fields Es(r) = M3
mn(ksr)and Hs(r) = −j
√εs/µsN
3mn(ksr) gives
∫
S
[(n × M3
mn
)·(
M3−m′n′
N3−m′n′
)+(n × N3
mn
)·(
N3−m′n′
M3−m′n′
)]dS = 0,
(B.23)while for r ∈ Ds, yields
jk2s
π
∫
S
[(n × M3
mn
)·(
M1−m′n′
N1−m′n′
)+(n × N3
mn
)·(
N1−m′n′
M1−m′n′
)]dS
=(
0δmm′δnn′
). (B.24)
Similarly, for r ∈ Ds, the Stratton–Chu representation theorem applied to thevector fields Ei(r) = M1
mn(kir) and H i(r) = −j√
εi/µiN1mn(kir) leads to
∫
S
[(n × M1
mn
)·(
M1−m′n′
N1−m′n′
)+(n × N1
mn
)·(
N1−m′n′
M1−m′n′
)]dS = 0.
(B.25)The regular and radiating spherical vector wave functions can be expressedas integrals over vector spherical harmonics [26]
M1mn(kr) = − 1
4πjn+1
∫ 2π
0
∫ π
0
(−j)mmn (β, α) ejk(β,α)·r sin β dβ dα,
(B.26)
N1mn(kr) = − 1
4πjn+1
∫ 2π
0
∫ π
0
nmn (β, α) ejk(β,α)·r sin β dβ dα,
(B.27)

B.2 Vector Wave Functions 269
and
M3mn(kr) = − 1
2πjn+1
∫ 2π
0
∫ π2 −j∞
0
(−j)mmn (β, α) ejk(β,α)·r sinβ dβ dα,
(B.28)
N3mn(kr) = − 1
2πjn+1
∫ 2π
0
∫ π2 −j∞
0
nmn (β, α) ejk(β,α)·r sin β dβ dα
(B.29)
for z > 0, respectively.The above system of vector functions is also known as the system of local-
ized vector spherical wave functions. Another system of vector functions whichis suitable for analyzing axisymmetric particles with extreme geometries is thesystem of distributed vector spherical wave functions [49]. For an axisymmet-ric particle with the axis of rotation along the z-axis, the distributed vectorspherical wave functions are defined as
M1,3mn(kr) = M1,3
m,|m|+l [k(r − znez)] ,
N 1,3mn(kr) = N1,3
m,|m|+l [k(r − znez)] , (B.30)
where zn∞n=1 is a dense set of points on the z-axis (Fig. B.1), ez is the unitvector in the direction of the z-axis, n = 1, 2, ...,m ∈ Z, and l = 1 if m = 0 andl = 0, if m = 0. M1
mn, N 1mn is an entire solution to the Maxwell equations and
M3mn, N 3
mn is a radiating solution to the Maxwell equations in R3 − znez.In the case of prolate scatterers, the distribution of the poles on the axis ofrotation adequately describes the particle geometry. In contrast, it is clearfrom physical considerations that this arrangement is not suitable for oblatescatterers. In this case, the procedure of analytic continuation of the vectorfields onto the complex plane along the source coordinate zn can be used
Ozn
z1
z2
r
r-znezM
x
y
z
Γ (support of DS)
Fig. B.1. Sources distributed on the z-axis

270 B Wave Functions
O z, Re z
ρ
Im z
ΣL
L z
η
Fig. B.2. Illustration of the complex plane. L is the generatrix of the surface andL is the image of L in the complex plane
(Fig. B.2). The complex plane Σ = z = (Re z, Im z)/Re z, Im z ∈ R is thedual of the azimuthal plane ϕ = const., Σ = η = (ρ, z)/ρ ≥ 0, z ∈ R, andis defined by taking the real axis Re z along the z-axis. The vector sphericalwave functions can be expressed in terms of the coordinates of the sourcepoint z ∈ Σ and the field point η ∈ Σ as
M1,3mn(kr) =
1√
2n(n + 1)z1,3
n (kR)
jmπ|m|n
(θ) [
sin(θ − θ)er
+ cos(θ − θ)eθ
]− τ |m|
n
(θ)
eϕ
ejmϕ (B.31)
and
N1,3mn(kr) =
1√
2n(n + 1)
n(n + 1)
z1,3n (kR)
kRP |m|
n (cos θ)
×[cos(θ − θ)er − sin(θ − θ)eθ
]+
[kRz1,3
n (kR)]′
kR
×
τ |m|n
(θ) [
sin(θ − θ)er + cos(θ − θ)eθ
]
+ jmπ|m|n
(θ)
eϕ
ejmϕ, (B.32)
where
R2 = ρ2 + (z − z)2, sin θ =ρ
Rand cos θ =
z − z
R.
B.3 Rotations
We consider two coordinate systems Oxyz and Ox1y1z1 having the same ori-gin. The coordinate system Ox1y1z1 is obtained by rotating the coordinate

B.3 Rotations 271
x
O
z
y
z1β
αγ
x1
y1
θ
θ1
M
r
Fig. B.3. Coordinate rotations
system Oxyz thought the Euler angles (α, β, γ) as shown in Fig. B.3. With(θ, ϕ) and (θ1, ϕ1) being the spherical angles of the same position vector r inthe coordinate systems Oxyz and Ox1y1z1, the addition theorem for sphericalwave functions under coordinate rotations is [58,213,239]
u1,3mn(kr, θ, ϕ) =
n∑
m′=−n
Dnmm′(α, β, γ)u1,3
m′n(kr, θ1, ϕ1), (B.33)
where the Wigner D-functions are defined as [262]
Dnmm′(α, β, γ) = (−1)m+m′
ejmαdnmm′(β)ejm′γ . (B.34)
The functions d are given by
dnmm′(β) = ∆mm′dn
mm′(β), (B.35)
where dnmm′ are the Wigner d-functions and
∆mm′ =
⎧⎪⎪⎨
⎪⎪⎩
1, m ≥ 0 , m′ ≥ 0(−1)m′
, m ≥ 0 , m′ < 0(−1)m , m < 0 , m′ ≥ 0(−1)m+m′
, m < 0 , m′ < 0,
(B.36)
with the property ∆mm′ = ∆m′m. The expression of Wigner d-functions forpositive and negative values of the indices m and m′ is given by
dnmm′(β) =
√(n + m′)!(n − m′)!(n + m)!(n − m)!
∑
σ
(−1)n−m′−σCn−m′−σn+m Cσ
n−m
×(
cosβ
2
)m+m′+2σ (sin
β
2
)2n−m−m′−2σ

272 B Wave Functions
and note that the above equation is valid for β < 0, if
cos(
β
2
)=
√1 + cos β
2, sin
(β
2
)= −√
1 − cos β
2
and for β > π, if
cos(
β
2
)= −√
1 + cos β
2, sin
(β
2
)=
√1 − cos β
2.
The Wigner d-functions are real and have the following symmetry proper-ties [58]:
dnm−m′(β) = (−1)n+m′
dnmm′(β + π), (B.37)
dn−mm′(β) = (−1)n+mdn
mm′(β + π), (B.38)
dn−m−m′(β) = (−1)m+m′
dnmm′(β), (B.39)
dnmm′(β) = (−1)m+m′
dnm′m(β), (B.40)
and
dnmm′(−β) = (−1)m+m′
dnmm′(β) = dn
m′m(β). (B.41)
Taking into account the above symmetry relations, we can express the d-functions in terms of the d-functions with positive values of the indices mand m′
dnmm′(β) =
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
dnmm′(β) , m ≥ 0 , m′ ≥ 0,
(−1)ndnm−m′(β + π) , m ≥ 0 , m′ < 0,
(−1)ndn−mm′(β + π) , m < 0 , m′ ≥ 0,
dn−m−m′(β), m < 0 , m′ < 0.
(B.42)
The orthogonality property of the Wigner d-functions is similar to that of theassociated Legendre functions and is given by
∫ π
0
dnmm′(β)dn′
mm′(β) sin βdβ =2
2n + 1δnn′ . (B.43)
The Wigner d-functions are related to the generalized spherical functionsPn
mm′ by the relation [78]
dnmm′(β) = jm
′−mPnmm′ (cos β) . (B.44)
The generalized spherical functions are complex and have the following sym-metry properties:

B.3 Rotations 273
Pnm−m′(x) = (−1)nPn
mm′(−x),
Pn−mm′(x) = (−1)nPn
mm′(−x),
Pn−m−m′(x) = Pn
mm′(x),
Pnmm′(x) = Pn
m′m(x),
where x = cos β. The orthogonality relation for the generalized spherical func-tions follows from the orthogonality relation for the Wigner d-function:
∫ π
0
Pnmm′ (cos β) Pn′
mm′ (cos β) sin βdβ =(−1)m+m′
2n + 1δnn′ .
In practice, the generalized spherical functions can be found from the recur-rence relation [162]
n√
(n + 1)2 − m2√
(n + 1)2 − m′2Pn+1mm′(x)
= (2n + 1) [n(n + 1)x − mm′] Pnmm′(x)
−(n + 1)√
n2 − m2√
n2 − m′2Pn−1mm′(x)
with the initial values
Pn0−1mm′ (x) = 0,
Pn0mm′(x) =
(−j)|m−m′|2n0
√(2n0)!
(|m − m′|)! (|m + m′|)!
× (1 − x)|m−m′|
2 (1 + x)|m+m′|
2 ,
and n0 = max(|m|, |m′|). From (B.42) and (B.44) we see that it is sufficient tocompute the generalized spherical functions for positive values of the indicesm and m′.
If the Euler angles (α1, β1, γ1) and (α2, β2, γ2) describe two consecutiverotations of a coordinate system and the Euler angles (α, β, γ) describes theresulting rotation, the addition theorem for the D-functions is [169,239]
Dnmm′(α, β, γ) =
n∑
m′′=−n
Dnmm′′(α1, β1, γ1)Dn
m′′m′(α2, β2, γ2) (B.45)
and the unitarity condition read as
n∑
m′′=−n
Dnmm′′(α1, β1, γ1)Dn
m′′m′(−γ1,−β1,−α1) = Dnmm′(0, 0, 0) = δmm′ .
(B.46)

274 B Wave Functions
If in (B.45) we set α1 = α2 = 0 and γ1 = γ2 = 0, then β = β1 + β2, and weobtain the addition theorem for the d-functions
dnmm′(β) =
n∑
m′′=−n
dnmm′′(β1)dn
m′′m′(β2).
In particular, when β2 = −β1 we derive the unitarity condition
n∑
m′′=−n
dnmm′′(β1)dn
m′′m′(−β1) =n∑
m′′=−n
(−1)m′+m′′dn
mm′′(β1)dnm′′m′(β1)
=n∑
m′′=−n
dnmm′′(β1)dn
m′m′′(β1)=dnmm′(0)=δmm′ .
The product of two d-functions can be expanded in terms of the Clebsch–Gordan coefficients Cm+m1u
mn,m1n1
dnmm′(β)dn1
m1m′1(β) =
n+n1∑
u=|n−n1|Cm+m1u
mn,m1n1du
m+m1m′+m′1(β) C
m′+m′1u
m′n,m′1n1
, (B.47)
and note that the Clebsch–Gordan coefficients are nonzero only when |n −n1| ≤ u ≤ n + n1. The following symmetry properties of the Clebsch–Gordancoefficients are used in our analysis [169,239]:
Cm+m1umn,m1n1
= (−1)n+n1+uC−m−m1u−mn,−m1n1
, (B.48)
Cm+m1umn,m1n1
= (−1)n+n1+uCm+m1um1n1,mn, (B.49)
Cm+m1umn,m1n1
= (−1)m+n
√2u + 12n1 + 1
C−m1n1mn,−m−m1u, (B.50)
Cm+m1umn,m1n1
= (−1)m1+n+u
√2u + 12n + 1
Cmnm+m1u,−m1n1
. (B.51)
To compute the Clebsch–Gordan coefficients we first define the coefficientsSu
mn,m1n1by the relation [77]
Cm+m1umn,m1n1
= gumn,m1n1
Sumn,m1n1
,
where
gumn,m1n1
=√
2u + 1
√(u + m + m1)!(u − m − m1)!
(n − m)!(n + m)!
×√
(n + n1 − u)! (u + n − n1)! (u − n + n1)!(n1 − m1)!(n1 + m1)! (n + n1 + u + 1)!

B.3 Rotations 275
The S-coefficients obey the three-term downward recurrence relation
Su−1mn,m1n1
= puSumn,m1n1
+ quSu+1mn,m1n1
for u = n + n1, n + n1 − 1, . . . ,max(|m + m1|, |n − n1|) with
pu =(2u + 1) (m − m1)u(u + 1) − (m + m1) [n (n + 1) − n1 (n1 + 1)]
(u + 1) (n + n1 − u + 1) (n + n1 + u + 1),
qu = −u(u + n − n1 + 1) (u − n + n1 + 1)(u + 1) (n + n1 − u + 1)
× (u + m + m1 + 1) (u − m − m1 + 1)n + n1 + u + 1
and the starting values
Sn+n1+1mn,m1n1
= 0,
Sn+n1mn,m1n1
= 1.
The rotation addition theorem for vector spherical wave functions is [213]
M1,3mn (kr, θ, ϕ) =
n∑
m′=−n
Dnmm′(α, β, γ)M1,3
m′n(kr, θ1, ϕ1), (B.52)
N1,3mn (kr, θ, ϕ) =
n∑
m′=−n
Dnmm′(α, β, γ)N1,3
m′n(kr, θ1, ϕ1) , (B.53)
and in matrix form we have[
M1,3mn (kr, θ, ϕ)
N1,3mn (kr, θ, ϕ)
]
= R (α, β, γ)
[M1,3
m′n′(kr, θ1, ϕ1)
N1,3m′n′(kr, θ1, ϕ1)
]
,
where R is the rotation matrix. The rotation matrix has a block-diagonalstructure and is given by
R (α, β, γ) =[
Rmn,m′n′ (α, β, γ) 00 Rmn,m′n′ (α, β, γ)
],
where
Rmn,m′n′ (α, β, γ) = Dnmm′(α, β, γ)δnn′ .
The unitarity condition for the D-functions yields
R (−γ,−β,−α) = R−1 (α, β, γ) (B.54)

276 B Wave Functions
and since
Dnm′m (−γ,−β,−α) = Dn∗
mm′(α, β, γ),
we also haveR (−γ,−β,−α) = R† (α, β, γ) , (B.55)
where X† stands for the complex conjugate transpose of the matrix X.Properties of Wigner functions and generalized spherical functions (which
have been introduced in the quantum theory of angular momentum) are alsodiscussed in [27,160].
B.4 Translations
We consider two coordinate systems Oxyz and Ox1y1z1 having identical spa-tial orientations but different origins (Fig. B.4). The vectors r and r1 arethe position vectors of the same field point in the coordinate systems Oxyzand Ox1y1z1, respectively, while the vector r0 connects the origins of bothcoordinate systems and is given by r0 = r − r1.
In general, the addition theorem for spherical wave functions can be writ-ten as [27,70]
umn (kr) =∞∑
n′=0
n′∑
m′=−n′
Cmn,m′n′ (kr0) um′n′ (kr1) .
Integral and series representations for the translation coefficients Cmn,m′n′
can be obtained by using the integral representations for the spherical wave
x
O
z
y
z1
x1
y1
M
r r1
r0O1
Fig. B.4. Coordinate translation

B.4 Translations 277
functions. For regular spherical wave functions, we use the integral represen-tation (B.1), the relation r = r0 + r1, and the spherical wave expansion ofthe plane wave exp(jk · r1) to obtain
u1mn (kr) =
∞∑
n′=0
n′∑
m′=−n′
C1mn,m′n′ (kr0) u1
m′n′ (kr1) (B.56)
with
C1mn,m′n′ (kr0) =
jn′−n
2π
∫ 2π
0
∫ π
0
Ymn (β, α) Y−m′n′ (β, α) ejk(β,α)·r0 sin β dβ dα .
(B.57)Taking into account the spherical wave expansion of the plane wave exp(jk·r0)and integrating over α, we find the series representation
C1mn,m′n′ (kr0) = 2jn
′−n∑
n′′
jn′′a (m,m′ | n′′, n, n′) u1
m−m′n′′ (kr0) (B.58)
with the expansion coefficients
a (m,m′ | n′′, n, n′) =∫ π
0
P |m|n (cos β) P
|m′|n′ (cos β) P
|m−m′|n′′ (cos β) sin βdβ.
We note that the expansion coefficients a(·) are defined by the spherical har-monic expansion theorem [70]
P |m|n (cos β) P
|m′|n′ (cos β) =
∑
n′′
a (m,−m′ | n′′, n, n′) P|m+m′|n′′ (cos β) ,
where the summation over n′′ is finite covering the range |n − n′|, |n − n′| +2, ..., n+n′. These coefficients can be identified with a product of two Wigner3j symbols, which are associated with the coupling of two angular momen-tum eigenvectors. The azimuthal integration in (B.57) can be analyticallyperformed by using the identity
k · r0 = kρ0 sin β cos (α − ϕ0) + kz0 cos β
and the standard integral
∫ 2π
0
ejx cos(α−ϕ0)ej(m−m′)α dα = 2πjm′−mJm′−m(x)e−j(m′−m)ϕ0 ,
where (ρ0, ϕ0, z0) are the cylindrical coordinates of r0, and the result is
C1mn,m′n′ (kr0) = jn
′+m′−n−me−j(m′−m)ϕ0
∫ π
0
Jm′−m (kρ0 sinβ)
×P |m|n (cos β) P
|m′|n′ (cos β) ejkz0 cos β sinβ dβ . (B.59)

278 B Wave Functions
If the translation is along the z-axis, the addition theorem involves a singlesummation
u1mn (kr) =
∞∑
n′=0
C1mn,mn′ (kz0) u1
mn′ (kr1)
and the translation coefficients simplify to
C1mn,mn′ (kz0) = jn
′−n
∫ π
0
P |m|n (cos β) P
|m|n′ (cos β) ejkz0 cos β sinβ dβ. (B.60)
For radiating spherical wave functions we consider the integral representation(B.2) and the relation r = r0 + r1. For r1 > r0, we express u3
mn as (cf. (B.5))
u3mn(kr) =
12πjn
∫ 2π
0
∫ π
0
Ymn (β, α) Q(k, β, α, r1)ejk(β,α)·r0 sinβdβdα
and use the spherical wave expansion of the quasi-plane wave Q(k, β, α, r1)to derive
u3mn (kr) =
∞∑
n′=0
n′∑
m′=−n′
C1mn,m′n′ (kr0) u3
m′n′ (kr1) .
For r1 < r0, we represent the radiating spherical wave functions as
u3mn(kr) =
12πjn
∫ 2π
0
∫ π
0
Ymn (β, α) Q(k, β, α, r0)ejk(β,α)·r1 sinβdβdα
and use the spherical wave expansion of the plane wave exp(jk · r1) to obtain
u3mn (kr) =
∞∑
n′=0
n′∑
m′=−n′
C3mn,m′n′ (kr0) u1
m′n′ (kr1)
with
C3mn,m′n′ (kr0)
=jn
′−n
π
∫ 2π
0
∫ π
0
Ymn (β, α) Y−m′n′ (β, α) Q(k, β, α, r0) sin β dβ dα . (B.61)
Inserting the spherical wave expansion of the quasi-plane wave Q(k, β, α, r0)into (B.61) yields
C3mn,m′n′ (kr0) = 2jn
′−n∑
n′′
jn′′a (m,m′ | n′′, n, n′) u3
m−m′n′′ (kr0) . (B.62)
Finally, we note the integral representation for the translation coefficientsC3
mn,m′n′ in the specific case of axial translation:

B.4 Translations 279
C3mn,mn′ (kz0) = 2jn
′−n
∫ π2 −j∞
0
P |m|n (cos β) P
|m|n′ (cos β) ejkz0 cos β sinβdβ .
(B.63)Recurrence relations have been derived for the Cmn,mn′ coefficients [150].
The derivation is simple for the case of axial translation and positive m. Usingthe integral representation (B.60) (or (B.63)) and the recurrence relations forthe normalized associated Legendre functions (A.15) and (A.16), give
√(n − m − 1)(n − m + 1)
(2n − 1)(2n + 1)Cmn−1,mn′ (kz0)
+
√(n + m)(n + m + 1)
(2n + 1)(2n + 3)Cmn+1,mn′ (kz0)
=
√(n′ + m − 1)(n′ + m)
(2n′ − 1)(2n′ + 1)Cm−1n,m−1n′−1 (kz0)
+
√(n′ − m + 1)(n′ − m + 2)
(2n′ + 1)(2n′ + 3)Cm−1n,m−1n′+1 (kz0) , (B.64)
while the recurrence relation (A.14), yields√
(n − m + 1)(n + m + 1)(2n + 1)(2n + 3)
Cmn+1,mn′ (kz0)
−√
(n − m)(n + m)(2n − 1)(2n + 1)
Cmn−1,mn′ (kz0)
=
√(n′ − m)(n′ + m)(2n′ − 1)(2n′ + 1)
Cmn,mn′−1 (kz0)
−√
(n′ − m + 1)(n′ + m + 1)(2n′ + 1)(2n′ + 3)
Cmn,mn′+1 (kz0) . (B.65)
We note that the convention Cmn,mn′ = 0 for m > n or m > n′, is assumed inthe above equations. For the recurrence relationships to be of practical use,initial values are needed. This is accomplished by using the integral represen-tations
jn (kz0) =1
jn√
2(2n + 1)
∫ π
0
Pn (cos β) ejkz0 cos β sin β dβ,
h(1)n (kz0) =
1jn
√2
2n + 1
∫ π2 −j∞
0
Pn (cos β) ejkz0 cos β sin β dβ ,

280 B Wave Functions
which yields
C100,0n′ (kz0) = (−1)n′ √
2n′ + 1jn′ (kz0) ,
C300,0n′ (kz0) = (−1)n′ √
2n′ + 1h(1)n′ (kz0) .
Using these starting values, the Cmm,mn′ coefficients can be computed fromthe recurrence relation (B.64) with m = n + 1,
Cmm,mn′(kz0) =
√2m + 1
2m
[√(n′ + m − 1) (n′ + m)
(2n′ − 1) (2n′ + 1)Cm−1m−1,m−1n′−1(kz0)
+
√(n′ − m + 1) (n′ − m + 2)
(2n′ + 1) (2n′ + 3)Cm−1m−1,m−1n′+1 (kz0)
]
,
where Cmm,mn′ can be obtained from C00,0n′ for all values of m ≥ 1 andn′ ≥ m, while (B.65) can then be used to compute Cmn,mn′ for n ≥ m + 1.
In general, the translation addition theorem for vector spherical wave func-tions can be written as [43,213]
Mmn (kr) =∞∑
n′=1
n′∑
m′=−n′
Amn,m′n′(kr0)Mm′n′(kr1)
+Bmn,m′n′(kr0)Nm′n′(kr1),
Nmn (kr) =∞∑
n′=1
n′∑
m′=−n′
Bmn,m′n′(kr0)Mm′n′(kr1)
+Amn,m′n′(kr0)Nm′n′(kr1).
As in the scalar case, integral and series representations for the translationcoefficients can be obtained by using the integral representations for the vectorspherical wave functions. First we consider the case of regular vector sphericalwave functions. Using the integral representation (B.26), the relation r =r0 + r1, and the vector spherical wave expansion
(−j)mmn (β, α) ejk(β,α)·r1 =∞∑
n′=1
n′∑
m′=−n′
a1mn,m′n′M1
m′n′ (kr1)
+b1mn,m′n′N1
m′n′ (kr1)

B.4 Translations 281
with
a1mn,m′n′ = − 4jn
′+1
√2n′ (n′ + 1)
[mm′π|m|
n (β)π|m′|
n′ (β)
+ τ |m|n (β)τ |m
′|n′ (β)
]e−jm′α,
b1mn,m′n′ = − 4jn
′+1
√2n′ (n′ + 1)
[mπ|m|
n (β)τ |m′|
n′ (β)
+ m′τ |m|n (β)π|m
′|n′ (β)
]e−jm′α,
we obtain
M1mn (kr) =
∞∑
n′=1
n′∑
m′=−n′
A1mn,m′n′(kr0)M1
m′n′(kr1)
+B1mn,m′n′(kr0)N1
m′n′(kr1), (B.66)
N1mn (kr) =
∞∑
n′=1
n′∑
m′=−n′
B1mn,m′n′(kr0)M1
m′n′(kr1)
+A1mn,m′n′(kr0)N1
m′n′(kr1), (B.67)
where
A1mn,m′n′(kr0) =
jn′−n
2π√
nn′(n + 1) (n′ + 1)
∫ 2π
0
∫ π
0
[mm′π|m|
n (β)π|m′|
n′ (β)
+ τ |m|n (β)τ |m
′|n′ (β)
]ej(m−m′)αejk(β,α)·r0 sin β dβdα,
B1mn,m′n′(kr0) =
jn′−n
2π√
nn′(n + 1) (n′ + 1)
∫ 2π
0
∫ π
0
[mπ|m|
n (β)τ |m′|
n′ (β)
+ m′τ |m|n (β)π|m
′|n′ (β)
]ej(m−m′)αejk(β,α)·r0 sin βdβ dα.

282 B Wave Functions
Inserting the spherical wave expansion of the plane wave exp(jk ·r0) and inte-grating over α, we derive the following series representation for the translationcoefficients:
A1mn,m′n′(kr0) =
2jn′−n
√nn′(n + 1) (n′ + 1)
∑
n′′
jn′′
×a1 (m,m′ | n′′, n, n′) u1m−m′n′′ (kr0) ,
B1mn,m′n′(kr0) =
2jn′−n
√nn′(n + 1) (n′ + 1)
∑
n′′
jn′′
×b1 (m,m′ | n′′, n, n′) u1m−m′n′′ (kr0) ,
where
a1 (m,m′ | n′′, n, n′) =∫ π
0
[mm′π|m|
n (β)π|m′|
n′ (β) + τ |m|n (β)τ |m
′|n′ (β)
]
×P|m−m′|n′′ (cos β) sin β dβ, (B.68)
b1 (m,m′ | n′′, n, n′) =∫ π
0
[mπ|m|
n (β) τ|m′|n′ (β) + m′τ |m|
n (β)π|m′|
n′ (β)]
×P|m−m′|n′′ (cos β) sinβ dβ. (B.69)
We note that the coefficients a1(·) and b1(·) can be expressed in terms of thecoefficients a(·) by making use of the recurrence relations for the associatedLegendre functions. As in the scalar case, the integration with respect to theazimuthal angle α gives
A1mn,m′n′(kr0) =
jn′+m′−n−m
√nn′(n + 1) (n′ + 1)
e−j(m′−m)ϕ0
×∫ π
0
Jm′−m(kρ0 sin β)[mm′π|m|
n (β)π|m′|n′ (β)
+ τ |m|n (β)τ |m′|
n′ (β)]ejkz0 cos β sin β dβ

B.4 Translations 283
and
B1mn,m′n′(kr0) =
jn′+m′−n−m
√nn′(n + 1) (n′ + 1)
e−j(m′−m)ϕ0
×∫ π
0
Jm′−m(kρ0 sin β)[mπ|m|
n (β)τ |m′|n′ (β)
+ m′τ |m|n (β)π|m′|
n′ (β)]ejkz0 cos β sinβdβ.
If the translation is along the z-axis the double summation in (B.66) and(B.67) reduces to a single summation over the index n′, and we have
A1mn,mn′(kz0) =
jn′−n
√nn′(n + 1) (n′ + 1)
∫ π
0
[m2π|m|
n (β)π|m|n′ (β)
+ τ |m|n (β)τ |m|
n′ (β)]ejkz0 cos β sinβ dβ
and
B1mn,mn′(kz0) =
mjn′−n
√nn′(n + 1) (n′ + 1)
∫ π
0
[π|m|
n (β)τ |m|n′ (β)
+ τ |m|n (β)π|m|
n′ (β)]ejkz0 cos β sinβ dβ.
Passing to the radiating vector spherical wave functions we consider the in-tegral representation (B.28) and the relation r = r0 + r1. For r1 > r0, thisrepresentation can written as
M3mn(kr) = − 1
2πjn+1
∫ 2π
0
∫ π
0
(−j)mmn (β, α) Q(k, β, α, r1)ejk(β,α)·r0
× sin β dβ dα,
whence, using the vector spherical wave expansion
(−j)mmn (β, α) Q(k, β, α, r1) =∞∑
n′=1
n′∑
m′=−n′
a3mn,m′n′M3
m′n′ (kr1)
+b3mn,m′n′N1
m′n′ (kr1) ,
with
a3mn,m′n′ =
12a1
mn,m′n′ , b3mn,m′n′ =
12b1mn,m′n′ ,

284 B Wave Functions
yields
M3mn (kr) =
∞∑
n′=1
n′∑
m′=−n′
A1mn,m′n′(kr0)M3
m′n′(kr1)
+B1mn,m′n′(kr0)N3
m′n′(kr1),
N3mn (kr) =
∞∑
n′=1
n′∑
m′=−n′
B1mn,m′n′(kr0)M3
m′n′(kr1)
+A1mn,m′n′(kr0)N3
m′n′(kr1).
For r1 < r0, we represent the radiating vector spherical wave functions as
M3mn(kr) = − 1
2πjn+1
∫ 2π
0
∫ π
0
(−j)mmn (β, α) Q(k, β, α, r0)ejk(β,α)·r1
× sin β dβ dα,
proceed as in the case of regular vector spherical wave functions, and obtain
M3mn (kr) =
∞∑
n′=1
n′∑
m′=−n′
A3mn,m′n′(kr0)M3
m′n′(kr1)
+B3mn,m′n′(kr0)N3
m′n′(kr1),
N3mn (kr) =
∞∑
n′=1
n′∑
m′=−n′
B3mn,m′n′(kr0)M3
m′n′(kr1)
+A3mn,m′n′(kr0)N3
m′n′(kr1),
where
A3mn,m′n′(kr0) =
jn′−n
π√
nn′(n + 1) (n′ + 1)
∫ 2π
0
∫ π
0
[mm′π|m|
n (β)π|m′|
n′ (β)(B.70)
+ τ |m|n (β)τ |m
′|n′ (β)
]ej(m−m′)αQ(k, β, α, r0) sin βdβdα,
B3mn,m′n′(kr0) =
jn′−n
π√
nn′(n + 1) (n′ + 1)
∫ 2π
0
∫ π
0
[mπ|m|
n (β)τ |m′|
n′ (β) (B.71)
+ m′τ |m|n (β)π|m
′|n′ (β)
]ej(m−m′)αQ(k, β, α, r0) sin β dβ dα .
Making use of the spherical wave expansion of the quasi-plane waveQ(k, β, α, r0), we derive the series representations

B.4 Translations 285
A3mn,m′n′(kr0) =
2jn′−n
√nn′(n + 1) (n′ + 1)
∑
n′′
jn′′
×a1 (m,m′ | n′′, n, n′) u3m−m′n′′ (kr0) , (B.72)
B3mn,m′n′(kr0) =
2jn′−n
√nn′(n + 1) (n′ + 1)
∑
n′′
jn′′
×b1 (m,m′ | n′′, n, n′) u3m−m′n′′ (kr0) . (B.73)
In (B.70) and (B.71) the integration with respect to the azimuthal angle αcan be analytically performed and in the case of axial translation, the integralrepresentations for the translation coefficients A3
mn,m′n′ and B3mn,m′n′ read as
A3mn,mn′(kz0) =
2jn′−n
√nn′(n + 1) (n′ + 1)
∫ π2 −j∞
0
[m2π|m|
n (β)π|m|n′ (β)
+ τ |m|n (β)τ |m|
n′ (β)]ejkz0 cos β sin β dβ,
and
B3mn,mn′(kz0) =
2mjn′−n
√nn′(n + 1) (n′ + 1)
∫ π2 −j∞
0
[π|m|
n (β)τ |m|n′ (β)
+ τ |m|n (β)π|m|
n′ (β)]ejkz0 cos β sin β dβ.
The vector addition coefficients Amn,m′n′ and Bmn,m′n′ can be related to thescalar addition coefficients Cmn,m′n′ . For axial translations and positive valuesof m, these relations can be obtained by partial integration and by using theintegral representations for the addition coefficients, the associated Legendreequation (A.13) and the recurrence relation (A.17). We obtain [150]
Amn,mn′(kz0) =
√n′(n′ + 1)n(n + 1)
[Cmn,mn′ (kz0)
+kz0
n′ + 1
√(n′ − m + 1)(n′ + m + 1)
(2n′ + 1)(2n′ + 3)Cmn,mn′+1 (kz0)
+kz0
n′
√(n′ − m)(n′ + m)(2n′ + 1)(2n′ − 1)
Cmn,mn′−1 (kz0)
]
and
Bmn,mn′(kz0) = jkz0m
√nn′(n + 1) (n′ + 1)
Cmn,mn′ (kz0) .

286 B Wave Functions
For negative values of the index m, the following symmetry relations can beused for practical calculations
A−mn,−mn′(kz0) = Amn,mn′(kz0),
B−mn,−mn′(kz0) = −Bmn,mn′(kz0).
The translation coefficients for axial translation can be obtained from theabove recurrence relations. In general, through rotation of coordinates, thenumerical advantages to a common axis can be exploited and a transformationfrom Oxyz to Ox1y1z1 can be accomplished through three steps [150]:
1. The coordinate system Oxyz is rotated with the Euler angles α = ϕ0,β = θ0 and γ = 0, where (r0, θ0, ϕ0) are the spherical coordinates of theposition vector r0.
2. The rotated coordinate system is axially translated with r0.3. The translated coordinate system is rotated back to the original orienta-
tion with the Euler angles α = 0, β = −θ0 and γ = −ϕ0.
The rotation-axial translation-rotation scheme gives
Xmn,m′n′(kr0) =n∑
m′′=−n
Dnmm′′(ϕ0, θ0, 0)Xm′′n,m′′n′ (kr0)
×Dn′
m′′m′(0,−θ0,−ϕ0),
where X stands for A or B. The translation addition theorem can be writtenin matrix form as
[Mp
mn (kr)Np
mn (kr)
]
= T pq (kr0)
[M q
m′n′ (kr1)N q
m′n′ (kr1)
]
,
where the pair (p, q) takes the values (1, 1), (3, 3), and (3, 1), and
T 11 (kr0) = T 33 (kr0) =
[A1
mn,m′n′ (kr0) B1mn,m′n′ (kr0)
B1mn,m′n′ (kr0) A1
mn,m′n′ (kr0)
]
and
T 31 (kr0) =
[A3
mn,m′n′ (kr0) B3mn,m′n′ (kr0)
B3mn,m′n′ (kr0) A3
mn,m′n′ (kr0)
]
.
We conclude this section by noticing some symmetry properties of the trans-lation coefficients for the inverse transformation:
[Mp
mn (kr1)Np
mn (kr1)
]
= T pq (−kr0)
[M q
m′n′ (kr)N q
m′n′ (kr)
]
.

B.4 Translations 287
Using the integral representation for the translation coefficients, making thetransformation ϕ0 → ϕ0 + π, changing the variable of integration from β toπ − β and using the identities (A.24) and (A.25), yields
Amn,m′n′ (−kr0) = (−1)n+n′Amn,m′n′ (kr0) ,
Bmn,m′n′ (−kr0) = (−1)n+n′+1Bmn,m′n′ (kr0) .
Further, since
Amn,m′n′ (kr0) = (−1)n+n′A−m′n′,−mn (kr0) ,
Bmn,m′n′ (kr0) = (−1)n+n′+1B−m′n′,−mn (kr0) ,
we obtain
Amn,m′n′ (−kr0) = A−m′n′,−mn (kr0) , (B.74)
Bmn,m′n′ (−kr0) = B−m′n′,−mn (kr0) . (B.75)
Recurrence relations for the scalar and vector addition theorem has also beengiven by Chew [32,33], Chew and Wang [35] and Kim [117]. The relationshipbetween the coefficients of the vector addition theorem and those of the scalaraddition theorem has been discussed by Bruning and Lo [29], and Chew [32].

C
Computational Aspectsin Effective Medium Theory
In this appendix we compute the basic integrals appearing in the analysis ofelectromagnetic scattering from a half-space of randomly distributed particles.Our derivation follows the procedures described by Varadan et al. [236], Tsangand Kong [223,226], and Tsang et al. [228].
C.1 Computation of the Integral I1mm′n′′
The integral I1mm′n′′ is
I1mm′n′′ =
∫
Dp
ejKe·r0pu3m′−mn′′ (ksrlp) dV (r0p) ,
where Ke = Ksez, and the integration domain Dp is the half-space z0p ≥ 0,excluding a spherical volume of radius 2R centered at r0l. The volume integralcan be transformed into a surface integral by making use of the followingresult. Let u and v be two scalar fields satisfying the Helmholtz equation inthe bounded domain D, with the wave numbers Ks and ks, i.e.,
∆u + K2s u = 0,
∆v + k2s v = 0.
Then, from Green’s theorem we have∫
D
uvdV =1
k2s − K2
s
∫
D
(v∆u − u∆v) dV
=1
k2s − K2
s
∫
S
(v
∂u
∂n− u
∂v
∂n
)dS,
where S is the boundary surface of the domain D, and n is the outward unitnormal vector to S. Using this result we transform the integral I1
mm′n′′ asfollows:

290 C Computational Aspects in Effective Medium Theory
O
Op
Olr0l
z
R
r0p rlpθlp
SR
Sz
S
Ω
2R
∞
∞
Fig. C.1. Integration surfaces SR, S∞ and Sz
I1mm′n′′ =
1k2s − K2
s
∫
SR∪S∞∪Sz
[u3
m′−mn′′ (ksrlp)∂
∂n
(ejKe·r0p
)
− ejKe·r0p∂u3
m′−mn′′
∂n(ksrlp)
]dS (r0p) .
The integral can be decomposed into three integrals
I1mm′n′′ = I1,R
mm′n′′ + I1,∞mm′n′′ + I1,z
mm′n′′ ,
where I1,Rmm′n′′ is the integral over the spherical surface SR of radius 2R cen-
tered at r0l, I1,∞mm′n′′ is the integral over the surface of a half-sphere S∞ with
radius R∞ in the limit R∞ → ∞, and I1,zmm′n′′ is the integral over the xy-
plane Sz (the plane z = 0). The choice of the integration surfaces is shown inFig. C.1.
Using the identity r0p = r0l + rlp and replacing, for convenience, thevariables rlp, θlp and ϕlp by r, θ and ϕ, respectively, we obtain
I1,Rmm′n′′ = − 1
k2s − K2
s
ejKsz0l
×∫
SR
h
(1)n′′ (ksr) P
|m′−m|n′′ (cos θ) ej(m′−m)ϕ ∂
∂r
(ejKe·r)
− ejKe·r ∂
∂r
[h
(1)n′′ (ksr) P
|m′−m|n′′ (cos θ) ej(m′−m)ϕ
]dS(r),
whence, taking into account the series representation
ejKe·r =∞∑
n′=0
2jn′√
2n′ + 12
jn′ (Ksr) Pn′ (cos θ) (C.1)

C.1 Computation of the Integral I1mm′n′′ 291
for Ke · r = Ksr cos θ, the orthogonality of the associated Legendre functionsand the relation Ke · r0l = Ksz0l, we end up with
I1,Rmm′n′′ =
16πR3
(ksR)2 − (KsR)2jn
′′√
2n′′ + 12
ejKsz0lδmm′Fn′′ (Ks, ks, R) ,
where
Fn′′ (Ks, ks, R) = (ksR)(h
(1)n′′ (2ksR)
)′jn′′ (2KsR)
− (KsR)h(1)n′′ (2ksR) (jn′′ (2KsR))′ .
To compute I1,∞mm′n′′ we use the stationary point method. Using the inequality
ImKs > 0 and the asymptotic expressions of the spherical Hankel functionsof the first kind
h(1)n′′ (ksr) =
(−j)n′′+1ejksr
ksr,
and
ddr
[h
(1)n′′ (ksr)
]=
j(−j)n′′+1ejksr
r,
we see that I1,∞mm′n′′ vanishes as R∞ → ∞.
To evaluate I1,zmm′n′′ we pass to cylindrical coordinates, integrate over ϕ,
and obtain
I1,zmm′n′′ = − 2π
k2s − K2
s
δmm′
∫ ∞
0
jKsh
(1)n′′ (ksr) Pn′′ (cos θ)
− ∂
∂z
[h
(1)n′′ (ksr) Pn′′ (cos θ)
]
z=−z0l
ρdρ.
Further, using Kasterin’s representation [228,258]
h(1)n′′ (ksr) Pn′′ (cos θ) = (−j)n′′
Pn′′
(1
jks
∂
∂z
)h
(1)0 (ksr)
with
h(1)0 (ksr) =
ejksr
jksr,
we find that
I1,zmm′n′′ = − 2π
k2s − K2
s
(−j)n′′δmm′
×∫ ∞
0
[(jKs −
∂
∂z
)Pn′′
(1
jks
∂
∂z
)ejks
√ρ2+z2
jks
√ρ2 + z2
]
z=−z0l
ρdρ.

292 C Computational Aspects in Effective Medium Theory
Performing the integration and using the relation
Pn′′
(1
jks
∂
∂z
)(e−jksz
k2s
)= (−1)n′′ 1
k2s
√2n′′ + 1
2e−jksz,
we obtain
I1,zmm′n′′ =
2π
k2s (Ks − ks)
jn′′+1
√2n′′ + 1
2ejksz0lδmm′ .
The final result is
I1mm′n′′ = I1,R
mm′n′′ + I1,zmm′n′′
=16πR3
(ksR)2 − (KsR)2jn
′′√
2n′′ + 12
ejKsz0lδmm′Fn′′ (Ks, ks, R)
+2π
k2s (Ks − ks)
jn′′+1
√2n′′ + 1
2ejksz0lδmm′ . (C.2)
C.2 Computation of the Integral I2mm′n′′
The integral I2mm′n′′ is
I2mm′n′′ =
∫
Dp
[g (rlp) − 1] ejKe·r0pu3m′−mn′′ (ksrlp) dV (r0p) ,
where Ke = Ksez, and the domain of integration contains the half-spacez0p ≥ 0 less a sphere of radius 2R centered at r0l. For a spherical symmetricpair distribution function, g(rlp) = g(rlp), the function g(rlp)−1 tends to zerofor a few 2R-values. Therefore, if the point r0l is at least several diametersdeep in the scattering medium, the volume of integration can be extended toinfinity (Fig. C.2). Taking into account that r0p = r0l +rlp, and replacing thevariables rlp, θlp and ϕlp by r, θ and ϕ, respectively, we obtain
I2mm′n′′ = ejKe·r0l
∫ 2π
0
∫ π
0
∫ ∞
2R
[g(r) − 1] ejKe·rh(1)n′′ (ksr) P
|m′−m|n′′ (cos θ)
×ej(m′−m)ϕr2 sin θ dr dθ dϕ .
Using the plane wave expansion (C.1), the orthogonality relations of the as-sociated Legendre functions and the equation Ke · r0l = Ksz0l, we derive
I2mm′n′′ = 4πjn
′′√
2n′′ + 12
ejKsz0lδmm′
∫ ∞
2R
[g(r) − 1] jn′′ (Ksr) h(1)n′′ (ksr) r2dr.
Changing the variables from r to x = r/(2R), we find that

C.3 Computation of the Terms S11nn′ and S2
1nn′ 293
Op
Ol
R∞
rlpθlp
SR
S∞2R
Fig. C.2. Illustration of the domain of integration bounded by the spherical surfaceSR and a sphere situated in the far-field region
I2mm′n′′ = 32πR3jn
′′√
2n′′ + 12
ejKsz0lδmm′Gn′′ (Ks, ks, R) , (C.3)
where
Gn′′ (Ks, ks, R) =∫ ∞
1
[g (2Rx) − 1] h(1)n′′ (2ksRx) jn′′ (2KsRx)x2dx.
C.3 Computation of the Terms S11nn′ and S2
1nn′
The terms S11nn′ and S2
1nn′ are given by
S11nn′ =
∞∑
n′′=0
(−1)n′′√
2n′′ + 12
I11nn′n′′ ,
S21nn′ =
∞∑
n′′=0
(−1)n′′√
2n′′ + 12
I21nn′n′′ ,
where
I11nn′n′′ =
∫ π
0
[π1
n(β)π1n′(β) + τ1
n(β)τ1n′(β)
]Pn′′ (cos β) sin β dβ,
I21nn′n′′ =
∫ π
0
[π1
n(β)τ1n′(β) + τ1
n(β)π1n′(β)
]Pn′′ (cos β) sin β dβ.
To compute S11nn′ , we consider the function
fnn′(β) = π1n(β)π1
n′(β) + τ1n(β)τ1
n′(β) (C.4)

294 C Computational Aspects in Effective Medium Theory
for fixed values of the indices n and n′. This function can be expanded interms of Legendre polynomials
fnn′ (β) =∞∑
n′′=0
ann′,n′′Pn′′ (cos β) , (C.5)
where the expansion coefficients are given by
ann′,n′′ =∫ π
0
fnn′(β)Pn′′ (cos β) sin β dβ = I11nn′n′′ .
Using the special value of the Legendre polynomial at β = π,
Pn′′ (cos π) = (−1)n′′√
2n′′ + 12
,
we see that (C.5) leads to
fnn′(π) =∞∑
n′′=0
(−1)n′′√
2n′′ + 12
I11nn′n′′ = S1
1nn′ .
On the other hand, since
π1n(π) =
(−1)n−1
2√
2
√n(n + 1) (2n + 1),
τ1n(π) =
(−1)n
2√
2
√n(n + 1) (2n + 1).
(C.4) implies that
fnn′(π) = snn′ =(−1)n+n′
4
√n(n + 1) (2n + 1)
√n′(n′ + 1) (2n′ + 1) (C.6)
and therefore,
S11nn′ = snn′ .
Analogously, we find that
S21nn′ = −snn′ .

D
Completenessof Vector Spherical Wave Functions
The completeness and linear independence of the systems of radiating andregular vector spherical wave functions on closed surfaces have been estab-lished by Doicu et al. [49]. In this appendix we prove the completeness andlinear independence of the regular and radiating vector spherical wave func-tions on two enclosing surfaces. A similar result has been given by Aydin andHizal [5] for both the regular and radiating vector spherical wave functionswith nonzero divergence, i.e., the solutions to the vector Helmholtz equation.
Before formulating the boundary-value problem for the Maxwell equa-tions we introduce some normed spaces which are relevant in electromagneticscattering theory. With S being the boundary of a domain Di we denoteby [39,40]
Ctan(S) = a/a ∈ C(S),n · a = 0
the space of all continuous tangential fields and by
C0,αtan(S) =
a/a ∈ C0,α(S),n · a = 0
, 0 < α ≤ 1 ,
the space of all uniformly Holder continuous tangential fields equipped withthe supremum norm and the Holder norm, respectively. The space of uniformlyHolder continuous tangential fields with uniformly Holder continuous surfacedivergence (∇s) is defined as
C0,αtan,d(S) =
a/a ∈ C0,α
tan(S),∇s · a ∈ C0,α(S)
, 0 < α ≤ 1 ,
while the space of square integrable tangential fields is introduced as
L2tan(S) =
a/a ∈ L2(S),n · a = 0
.
Now, let S1 and S2 be two closed surfaces of class C2, with S1 enclosing S2
(Fig. D.1). Let the doubly connected domain between S1 and S2 be denotedby Di,1, the domain interior to S2 by Di,2, the domain interior to S1 by Di,

296 D Completeness of Vector Spherical Wave Functions
O
S1Di,1
Ds
S2Di,2
n1
n2
εi,µi
Fig. D.1. The closed surfaces S1 and S2
and the domain exterior to S1 by Ds. We assume that the origin is in Di,2,and denote by n1 and n2 the outward normal unit vectors to S1 and S2,respectively. The wave number in the domain Di,1 is ki = k0
√εiµi, where k0
is the wave number in free space, and εi and µi are the relative permittivityand permeability of the domain Di,1. We introduce the product spaces
Ctan(S1,2) = Ctan(S1) × Ctan(S2),
C0,αtan(S1,2) = C0,α
tan(S1) × C0,αtan(S2) ,
C0,αtan,d(S1,2) = C0,α
tan,d(S1) × C0,αtan,d(S2) ,
L2tan(S1,2) = L2
tan(S1) × L2tan(S2),
and define the scalar product in L2tan(S1,2) by
⟨(x1
x2
),
(y1
y2
)⟩
2,S1,2
= 〈x1,y1〉2,S1+ 〈x2,y2〉2,S2
.
The Maxwell boundary-value problem for the doubly connected domain Di,1
has the following formulation.Find a solution Ei,H i ∈ C1(Di,1) ∩ C(Di,1) to the Maxwell equations in
Di,1
∇× Ei = jk0µiH i , ∇× H i = −jk0εiEi,
satisfying the boundary conditions
n1 × Ei = f1 on S1 ,
n2 × Ei = f2 on S2 ,
where f1 and f2 are given tangential vector fields.Denoting by σ(Di,1) the spectrum of eigenvalues of the Maxwell boundary-
value problem, we assume that for f1 ∈ C0,αtan,d(S1) and f2 ∈ C0,α
tan,d(S2), both

D Completeness of Vector Spherical Wave Functions 297
Ei and H i belong to C0,α(Di,1), and for ki /∈ σ(Di,1), the Maxwell boundary-value problem possesses an unique solution.
Theorem 1. Consider Di,1 a bounded domain of class C2 with boundaries S1
and S2. Define the vector potentials
A1(r) =∫
S1
a1(r′)g(ki, r, r′)dS(r′) ,
A2(r) =∫
S2
a2(r′)g(ki, r, r′)dS(r′)
for a1 ∈ L2tan(S1) and a2 ∈ L2
tan(S2), assume ki /∈ σ(Di,1) and
∇×∇× A1 + ∇×∇× A2 = 0
in Ds and Di,2. Then a1 ∼ 0 on S1 (a1 vanishes almost everywhere on S1),and a2 ∼ 0 on S2.
Proof. Defining the electromagnetic fields
E =j
k0εi(∇×∇× A1 + ∇×∇× A2) ,
H = − jk0µi
∇× E = ∇× A1 + ∇× A2,
passing to the boundary along a normal direction and using the jump relationsfor the curl of a vector potential with square integrable density [49], we findthat
0 = limh→0+
‖n1 ×H (· + hn1 (·))
−
n1 ×[∇×
∫
S1
a1(r′)g(ki, ·, r′)dS(r′)]
+12a1
− n1 ×[∇×
∫
S2
a2(r′)g(ki, ·, r′)dS(r′)]∥∥∥∥
2,S1
and
0 = limh→0+
‖n2 ×H (· − hn2 (·))
−
n2 ×[∇×
∫
S2
a2(r′)g(ki, ·, r′)dS(r′)]− 1
2a2
− n2 ×[∇×
∫
S1
a1(r′)g(ki, ·, r′)dS(r′)]∥∥∥∥
2,S2
.

298 D Completeness of Vector Spherical Wave Functions
Defining the operators
(M11a) (r) = n1 (r) ×[∇×
∫
S1
a(r′)g(ki, r, r′)dS(r′)]
, r ∈ S1,
(M12a) (r) = n1(r) ×[∇×
∫
S2
a(r′)g(ki, r, r′)dS(r′)]
, r ∈ S1 ,
and
(M21a) (r) = n2(r) ×[∇×
∫
S1
a(r′)g(ki, r, r′)dS(r′)]
, r ∈ S2 ,
(M22a) (r) = n2(r) ×[∇×
∫
S2
a(r′)g(ki, r, r′)dS(r′)]
, r ∈ S2 ,
we obtain(
12I + M11
)a1 + M12a2 = 0,
almost everywhere on S1, and
−M21a1 +(
12I −M22
)a2 = 0,
almost everywhere on S2. Note that M11 and M22 are the singular magneticoperators on the surfaces S1 and S2, respectively, while M12 and M21 arenonsingular operators. In compact operator form, we have
a + Ka = 0,
where
a =(
a1
a2
)and K =
[2M11 2M12
−2M21 −2M22
].
The above integral equation is a Fredholm integral equation of the second kind,and according to Mikhlin [161] we find that a ∼ a0 ∈ Ctan(S1,2). Noticing thatthe operator K map Ctan(S1,2) into C
0,αtan(S1,2) and C
0,αtan(S1,2) into C
0,αtan,d(S1,2),
we see that a ∼ a0 ∈ C0,αtan,d(S1,2), where a0 =
(a10
a20
). The properties of the
vector potentials with uniformly Holder continuous densities, then yields E ,H ∈ C0,α(Di,1). The jump relations for the double curl of the vector potentialsA1 and A2 [49], give n1 × E− = 0 on S1, and n2 × E+ = 0 on S2. Therefore,E and H solve the homogeneous Maxwell boundary-value problem, and sinceki /∈ σ(Di,1), it follows that E = H = 0 in Di,1. Finally, from the jumprelations (for continuous densities)
n1 ×H+ − n1 ×H− = a10 = 0,

D Completeness of Vector Spherical Wave Functions 299
and
n2 ×H+ − n2 ×H− = a20 = 0,
we obtain a1 ∼ 0 on S1, and a2 ∼ 0 on S2. The following theorems state the completeness and linear independence of
the system of regular and radiating spherical vector wave functions on twoenclosing surfaces.
Theorem 2. Let S1 and S2 be two closed surfaces of class C2, with S1 en-closing S2, and let n1 and n2 be the outward normal unit vectors to S1 andS2, respectively. The system of vector functions(
n1 × M3mn
n2 × M3mn
)
,
(n1 × N3
mn
n2 × N3mn
)
,
(n1 × M1
mn
n2 × M1mn
)
,
(n1 × N1
mn
n2 × N1mn
)
,
n = 1, 2, . . . , m = −n, . . . , n/ki /∈ σ (Di,1)
is complete in L2tan(S1,2).
Proof. It is sufficient to show that for a =(
a1
a2
)∈ L2
tan(S1,2), the set of
closure relations∫
S1
a∗1 ·(n1 × M3
mn
)dS +
∫
S2
a∗2 ·(n2 × M3
mn
)dS = 0,
∫
S1
a∗1 ·(n1 × N3
mn
)dS +
∫
S2
a∗2 ·(n2 × N3
mn
)dS = 0,
and∫
S1
a∗1 ·(n1 × M1
mn
)dS +
∫
S2
a∗2 ·(n2 × M1
mn
)dS = 0,
∫
S1
a∗1 ·(n1 × N1
mn
)dS +
∫
S2
a∗2 ·(n2 × N1
mn
)dS = 0
for n = 1, 2, . . ., and m = −n, . . . , n, yields a1 ∼ 0 on S1, and a2 ∼ 0 on S2.As in the proof of Theorem 1, we consider the vector potentials A1 and A2
with densities a′1 = n1 × a∗
1, and a′2 = n2 × a∗
2, respectively, and define thevector field
E =j
k0εi(∇×∇× A1 + ∇×∇× A2).
Restricting r to lies inside a sphere enclosed in S2 and using the vector spheri-cal wave expansion of the dyad gI, we see that the first set of closure relationsgives E = 0 in Di,2. Analogously, but restricting r to lies outside a sphere en-closing S1, we deduce that the second set of closure relations yields E = 0 inDs. Theorem 1 can now be used to conclude.

300 D Completeness of Vector Spherical Wave Functions
Theorem 3. Under the same assumptions as in Theorem2, the system ofvector functions(
n1 × M3mn
n2 × M3mn
)
,
(n1 × N3
mn
n2 × N3mn
)
,
(n1 × M1
mn
n2 × M1mn
)
,
(n1 × N1
mn
n2 × N1mn
)
,
n = 1, 2, . . . , m = −n, . . . , n/ki /∈ σ (Di,1)
is linearly independent in L2tan(S1,2).
Proof. We need to show that for any Nrank, the relations
Nrank∑
n=1
n∑
m=−n
αmn
(n1 × M3
mn
n2 × M3mn
)
+ βmn
(n1 × N3
mn
n2 × N3mn
)
+γmn
(n1 × M1
mn
n2 × M1mn
)
+ δmn
(n1 × N1
mn
n2 × N1mn
)
= 0 ,
(on S1
on S2
)
give αmn = βmn = γmn = δmn = 0, for n = 1, 2, . . . , Nrank and m =−n, . . . , n. Defining the electromagnetic field
E =Nrank∑
n=1
n∑
m=−n
αmnM3mn + βmnN3
mn + γmnM1mn + δmnN1
mn,
we see that n1 × E = 0 on S1 and n2 × E = 0 on S2. The uniqueness of theMaxwell boundary-value problem then gives E = 0 in Di,1, and since E is ananalytic function we deduce that E = 0 in Di−0. Using the representationsfor the vector spherical wave functions M1,3
mn and N1,3mn in terms of vector
spherical harmonincs mmn and nmn, and the fact that the system of vectorspherical harmonics is orthogonal on the unit sphere, we obtain
αmnh(1)n (kir) + γmnjn (kir) = 0,
βmn
[kirh
(1)n (kir)
]′+ δmn [kirjn (kir)]
′ = 0,
for r > 0. Taking into account the expressions of the spherical Bessel andHankel functions for small value of the argument
jn(x) =xn
(2n + 1)!!1 + O
(x2)
and
h(1)n (x) = −j
(2n − 1)!!xn+1
1 + O
(x2)
,

D Completeness of Vector Spherical Wave Functions 301
we multiply the first equation by (kir)n+1 and let kir → 0. We obtain αmn = 0and further γmn = 0. Employing the same arguments for the second equation,we deduce that βmn = 0 and δmn = 0.
In the same manner we can prove the completeness and linear indepen-dence of the system of distributed vector spherical wave functions M1,3
mn andN 1,3
mn.

References
1. M. Abramowitz, I.A. Stegun, Handbook of Mathematical Functions with For-mulas, Graphs and Mathematical Tables (National Bureau of Standards,Washington, DC, 1964)
2. A.L. Aden, Electromagnetic scattering from spheres with sizes comparable tothe wavelength, J. Appl. Phys. 22, 601 (1951)
3. S. Amari, J. Bornemann, Efficient numerical computation of singular integralswith application to electromagnetics, IEEE Trans. Antennas Propagat. 43,1343 (1995)
4. J.C. Auger, B. Stout, A recursive centered T -matrix algorithm to solve themultiple scattering equations: Numerical validation, J. Quant. Spectrosc. Ra-diat. Transfer 79–80, 533 (2003)
5. K.A. Aydin, A. Hizal, On the completeness of the spherical vector wave func-tions, J. Math. Anal. Appl. 117, 428 (1986)
6. A.J. Baran, P. Yang, S. Havemann, Calculation of the single-scattering prop-erties of randomly oriented hexagonal ice columns: A comparison of the T -matrix and the finite-difference time-domain methods, Appl. Opt. 40, 4376(2001)
7. P.W. Barber, Differential scattering of electromagnetic waves by homogeneousisotropic dielectric bodies. Ph.D. Thesis, University of California, Los Angeles(1973)
8. P.W. Barber, S.C. Hill, Light Scattering by Particles: Computational Methods(World Scientific, Singapore 1990)
9. J.P. Barton, D.R. Alexander, Fifth-order corrected electromagnetic field com-ponent for a fundamental Gaussian beam, J. Appl. Phys. 66, 2800 (1989)
10. R.H.T. Bates, Modal expansions for electromagnetic scattering from perfectlyconducting cylinders of arbitrary cross-sections, Proc. IEE 115, 1443 (1968)
11. R.H.T. Bates, Analytic constraints on electromagnetic field computations,IEEE Trans. Microwave Theory Tech. 23, 605 (1975)
12. R.H.T. Bates, D.J.N. Wall, Null field approach to scalar diffraction: I. Generalmethod; II. Approximate methods; III. Inverse methods, Philos. Trans. R. Soc.London 287, 45 (1977)
13. R. Bhandri, Scattering coefficients for a multilayered sphere: Analytic expres-sions and algorithms, Appl. Opt. 24, 1960 (1985)

304 References
14. G.C. Bishop, J. Smith, Scattering from an elastic shell and a rough fluid-elesticinterface: Theory, J. Acoust. Soc. Am. 101, 767 (1997)
15. P.A. Bobbert, J. Vlieger, Light scattering by a sphere on a substrate, Physica137, 209 (1986)
16. C.F. Bohren, Light scattering by an optically active sphere, Chem. Phys. Lett.29, 458 (1974)
17. C.F. Bohren, D.R. Huffman, Absorption and Scattering of Light by Small Par-ticles (Wiley, New York, 1983)
18. L. Bomholt, MMP-3D-A Computer Code for Electromagnetic ScatteringBased on GMT, Ph.D. Thesis, Swiss Polytechnical Institute of Technology,Zurich (1990)
19. M. Born, E. Wolf, Principles of Optics (Cambridge University Press, Cam-bridge, 1999)
20. F. Borghese, P. Denti, R. Saija, Optical properties of spheres containing severalspherical inclusions, Appl. Opt. 33, 484 (1994)
21. F. Borghese, P. Denti, G. Toscano, O.I. Sindoni, Electromagnetic scatteringby a cluster of spheres, Appl. Opt. 18, 116 (1979)
22. F. Borghese, P. Denti, R. Saija, O.I. Sindoni, Optical properties of spherescontaining a spherical eccentric inclusion, J. Opt. Soc. Am. A 9, 1327 (1992)
23. F. Borghese, P. Denti, R. Saija, et al., Optical properties of a dispersion ofanisotropic particles with non-randomly distributed orientations. The case ofatmospheric ice crystals, J. Quant. Spectrosc. Radiat. Transfer 70, 237 (2001)
24. F. Borghese, P. Dentl, R. Saija, Scattering from Model Nonspherical Particles.Theory and Applications to Environmental Physics (Springer, Berlin Heidel-berg New York, 2003)
25. A. Bostrom, Scattering of acoustic waves by a layered elastic obstacle im-mersed in a fluid: An improved null field approach, J. Acoust. Soc. Am. 76,588 (1984)
26. A. Bostrom, G. Kristensson, S. Strom, Transformation properties of plane,spherical and cylindrical scalar and vector wave functions, in Field Represen-tations and Introduction to Scattering, ed. by V.V. Varadan, A. Lakhtakia,V.K. Varadan (North Holland, Amsterdam, 1991) pp. 165–210
27. D.M. Brink, G.R. Satchler, Angular Momentum (Oxford University Press,London, 1979)
28. V.N. Bringi, V.V. Varadan, V.K. Varadan, The effects on pair correlationfunction of coherent wave attenuation in discrete random media, IEEE Trans.Antennas Propagat. 30, 805 (1982)
29. J.H. Bruning, Y.T. Lo, Multiple scattering of EM waves by spheres. Part Iand II, IEEE Trans. Antennas Propagat. 19, 378 (1971)
30. A. Campion, P. Kambhampati, Surface-enhanced Raman scattering, Chem.Soc. Rev. 27, 241 (1998)
31. P.C. Chaumet, A. Rahmani, F. Fornel, J.-P. Dufour, Evanescent light scatter-ing: The validity of the dipole approximation, Phys. Rev. 58, 2310 (1998)
32. W.C. Chew, A derivation of the vector addition theorem, Microwave Opt.Technol. Lett. 3, 256 (1990)
33. W.C. Chew, Recurrence relations for three-dimensional scalar addition theo-rem, J. Electromag. Waves Appl. 6, 133 (1992)
34. W.C. Chew, Waves and Fields in Inhomogeneous Media (IEEE, New York,1995)

References 305
35. W.C. Chew, Y.M. Wang, Efficient way to compute the vector addition theo-rem, J. Electromag. Waves Appl. 7, 651 (1993)
36. P. Chylek, G. Videen, Effective medium approximations for heterogeneousparticles, in Light Scattering by Nonspherical Particles: Theory, Measurementsand Applications, ed. by M.I. Mishchenko, J.W. Hovenier, L.D. Travis (Acad-emic, San Diego, 2000) pp. 273–308
37. A. Clebsch, Uber die Reflexion an einer Kugelflache. J. Math. 61, 195 (1863)38. M. Clemens, T. Weiland, Discrete electromagnetism with the finite integration
technique. PIER 32, 65 (2001)39. D. Colton, R. Kress, Integral Equation Methods in Scattering Theory (Wiley,
New York, 1983)40. D. Colton, R. Kress, Inverse Acoustic and Electromagnetic Scattering Theory
(Springer, Berlin Heidelberg New York, 1992)41. M.F.R. Cooray, I.R. Ciric, Scattering of electromagnetic waves by a coated
dielectric spheroid, J. Electromag. Waves Appl. 6, 1491 (1992)42. C.W. Crowley, P.P. Silvester, H. Hurwitz, Jr., Covariant projection elements
for 3D vector field problems. IEEE Trans. Magn. 24, 397 (1988)43. O.R. Cruzan, Translational addition theorems for spherical vector wave func-
tions, Quart. Appl. Math. 20, 33 (1962)44. A.G. Dallas, On the convergence and numerical stability of the second Water-
man scheme for approximation of the acoustic field scattered by a hard object.Technical Report, Dept. of Mathematical Sciences, University of Delaware, No.2000-7:1-35 (2000)
45. L.W. Davis, Theory of electromagnetic beams, Phys. Rev. 19, 1177 (1979)46. A.J. Devaney, Quasi-plane waves and their use in radiation and scattering
problems, Opt. Commun. 35, 1 (1980)47. K.H. Ding, C.E. Mandt, L. Tsang, J.A. Kong, Monte Carlo simulations of pair
distribution functions of dense discrete random media with multipole sizes ofparticles, J. Electromag. Waves Appl. 6, 1015 (1992)
48. A. Doicu, T. Wriedt, Plane wave spectrum of electromagnetic beams, Opt.Commun. 136, 114 (1997)
49. A. Doicu, Y. Eremin, T. Wriedt, Acoustic and Electromagnetic ScatteringAnalysis Using Discrete Sources (Academic, London 2000)
50. A. Doicu, T. Wriedt, Null-field method with discrete sources to electromag-netic scattering from layered scatterers, Comput. Phys. Commun. 138, 136(2001)
51. A. Doicu, T. Wriedt, Null-field method with discrete sources to electromag-netic scattering from composite objects, Comput. Phys. Commun. 190, 13(2001)
52. W.T. Doyle, Optical properties of a suspension of metal spheres, Phys. Rev.39, 9852 (1989)
53. B.T. Draine, The discrete-dipole approximation and its applications to inter-stellar graphite grains, Astrophys. J. 333, 848 (1988)
54. B.T. Draine, P.J. Flatau, Discrete-dipole approximation for scattering calcu-lations, J. Opt. Soc. Am. A 11, 1491 (1994)
55. B.T. Draine, P.J. Flatau, User guide for the discrete dipole approximationcode DDSCAT 6.0., http://arxiv.org/abs/astro-ph/0309069 (2003)
56. B.T. Draine, J.J. Goodman, Beyond Clausius-Mossotti: Wave propagation ona polarizable point lattice and the discrete dipole approximation, Astrophys.J. 405, 685 (1993)

306 References
57. C.E. Dungey, C.F. Bohren, Light scattering by nonspherical particles: A re-finement to the coupled-dipole method, J. Opt. Soc. Am. A 8, 81 (1991)
58. A.R. Edmonds, Angular Momentum in Quantum Mechanics (Princeton Uni-versity Press, Princeton, 1974)
59. Y.A. Eremin, N.V. Orlov, Simulation of light scattering from a particle upona wafer surface, Appl. Opt. 35, 6599 (1996)
60. Y.A. Eremin, N.V. Orlov, Analysis of light scattering by microparticles on thesurface of a silicon wafer, Opt. Spectrosc. 82, 434 (1997)
61. Y.A. Eremin, N.V. Orlov, Modeling of light scattering by nonspherical parti-cles based on discrete sources method, J. Quant. Spectrosc. Radiat. Transfer60, 451 (1998)
62. Y.A. Eremin, A.G. Sveshnikov, The Discrete Sources Method in Electromag-netic Diffraction Problems (Moscow State University Press, Moscow 1992), inRussian
63. G. Fairweather, A. Karageorghis, P.A. Martin, The method of fundamentalsolutions for scattering and radiation problems, Eng. Anal. Bound. Elem. 27,759 (2003)
64. J.G. Fikioris, N.K. Uzunoglu, Scattering from an eccentrically stratified di-electric sphere, J. Opt. Soc. Am. A 69, 1359 (1979)
65. J.G. Fikioris, P.C. Waterman, Multiple scattering of waves, II, Hole correctionsin the scalar case, J. Math. Phys. 5, 1413 (1964)
66. A.V. Filippov, M. Zurita, D.E. Rosner, Fractal-like aggregates: Relation be-tween morphology and physical properties, J. Colloid. Interface Sci. 229, 261(2000)
67. P.J. Flatau, SCATTERLIB: Light Scattering Codes Library. http://atol.ucsd.edu/˜pflatau/scatlib/ (1998)
68. P.J. Flatau, G.L. Stephens, B.T. Draine, Light scattering by rectangular solidsin the discrete-dipole approximation: A new algorithm exploiting the Block-Toplitz structure, J. Opt. Soc. Am. A 7, 593 (1990)
69. L.L. Foldy, The multiple scattering of waves, Phys. Rev. 67, 107 (1945)70. B. Friedman, J. Russek, Addition theorems for spherical waves, Quart. Appl.
Math. 12, 13 (1954)71. E. Fucile, F. Borghese, P. Denti, R. Saija, Theoretical description of dynamic
light scattering from an assembly of large axially symmetric particles, J. Opt.Soc. Am. A 10, 2611 (1993)
72. K.A. Fuller, Optical resonances and two-sphere systems, Appl. Opt. 33, 4716(1991)
73. K.A. Fuller, Scattering of light by coated spheres, Opt. Lett. 18, 257 (1993)74. K.A. Fuller, Scattering and absorption cross sections of compounded spheres.
I. Theory for external aggregation, J. Opt. Soc. Am. A 11, 3251 (1994)75. K.A. Fuller, Scattering and absorption cross sections of compounded spheres.
II. Calculations of external aggregation, J. Opt. Soc. Am. A 12, 881 (1995)76. K.A. Fuller, Scattering and absorption cross-sections of compounded spheres.
III. Spheres containing arbitrarily located spherical inhomogeneities, J. Opt.Soc. Am. A 12, 893 (1995)
77. K.A. Fuller, D.W. Mackowski, Electromagnetic scattering by compoundedspherical particles, in Light Scattering by Nonspherical Particles: Theory, Mea-surements, and Applications, ed. by M.I. Mishchenko, J.W. Hovenier, L.D.Travis (Academic, San Diego 2000), pp. 225–272

References 307
78. I.M. Gelfand, R.A. Minlos, Z.Y. Shapiro, Representations of the Rotation andLorentz Groups and their Applications (Pergamon, New York, 1963)
79. K. Georg, J. Tausch, Some error estimates for the numerical approximationof surface integrals, Math. Comput. 62, 755 (1994)
80. J.J. Goodman, B.T. Draine, P.J. Flatau, Application of FFT techniques tothe discrete dipole approximation, Opt. Lett. 16, 1198 (1991)
81. G. Gouesbet, G. Grehan, Sur la generalisation de la theorie de Lorenz–Mie,J. Opt. (Paris) 13, 97 (1982)
82. G. Gouesbet, J.A. Lock, Rigorous justification of the localized approximationto the beam shape coefficients in generalized Lorenz-Mie theory. II. Off-axisbeams, J. Opt. Soc. Am. A 11, 2516 (1994)
83. G. Gouesbet, G. Grehan, B. Maheau: Scattering of a Gaussian beam by a Miescatterer centre using a Bromwich formalism, J. Opt. (Paris) 16, 89 (1985)
84. G. Gouesbet, G. Grehan, B. Maheau, A localized interpretation to computeall the coefficients in the generalized Lorenz–Mie theory, J. Opt. Soc. Am. A7, 998 (1990)
85. G. Gouesbet, B. Maheau, G. Grehan, Light scattering from a sphere arbitrarilylocated in a Gaussian beam, using a Bromwich formulation, J. Opt. Soc. Am.A 5, 1427 (1989)
86. R. Graglia, D.R. Wilton, A.F. Peterson, Higher order interpolatory vectorsbases for computational electromagnetics, IEEE Trans. Antennas Propagat.45, 329 (1997)
87. G. Grehan, B. Maheau, G. Gouesbet, Scattering of laser beams by Mie scat-terer centers: Numerical results using a localized approximation, Appl. Opt.25, 3539 (1986)
88. L. Gurel, W.C. Chew, A recursive T-matrix algorithm for strips and patches,Radio Sci. 27, 387 (1992)
89. R.H. Hackman, The transition matrix for acoustic and elastic wave scatteringin prolate spheroidal coordinates, J. Acoust. Soc. Am. 75, 35 (1984)
90. R.H. Hackman, G.S. Sammelmann, Acoustic scattering in an homogeneouswaveguide: Theory, J. Acoust. Soc. Am. 80, 1447 (1986)
91. C. Hafner, The Generalized Multipole Technique for Computational Electro-magnetics (Artech House, Boston London, 1990)
92. C. Hafner, Max 1 A Visual Electromagnetics Platform for PCs (Wiley, Chich-ester, 1998)
93. C. Hafner, Post-modern Electromagnetics using Intelligent Maxwell Solvers(Wiley, Chichester, 1999)
94. C. Hafner, L. Bomholt, The 3D Electrodynamic Wave Simulator (Wiley,Chichester 1993)
95. A.-K. Hamid, I.R. Ciric, M. Hamid, Iterative solution of the scattering by anarbitrary configuration of conducting or dielectric spheres, IEE Proc. 138, 565(1991)
96. R.F. Harrington, Field Computation by Moment Methods (McGraw-Hill, NewYork 1968)
97. R.F. Harrington, Boundary integral formulations for homogeneous materialbodies. J. Electromag. Waves Appl. 3, 1 (1989)
98. S. Havemann, A.J. Baran, Extension of T -matrix to scattering of electro-magnetic plane waves by non-axisymmetric dielectric particles: Application tohexagonal ice cylinders, J. Quant. Spectrosc. Radiat. Transfer 70, 139 (2001)

308 References
99. J. Hellmers, T. Wriedt, Influence of particle shape models on T -matrix lightscattering simulations, J. Quant. Spectrosc. Radiat. Transfer 89, 97 (2004)
100. J.W. Hovenier, Structure of a general pure Muller matrix. Appl. Opt. 33, 8318(1994)
101. J.W. Hovenier, C.V.M. van der Mee, Fundamental relationships relevant tothe transfer of polarized light in a scattering atmosphere. Astron. Astrophys.128, 1 (1983)
102. J.W. Hovenier, C.V.M. van der Mee, Testing scattering matrices: A com-pendium of recipes. J. Quant. Spectroscop. Radiat. Transfer 55, 649 (1996)
103. J.W. Hovenier, C.V.M. van der Mee, Basic relationships for matrices describ-ing scattering by small particles, in Light Scattering by Nonspherical Particles:Theory, Measurements and Applications, ed. by M.I. Mishchenko, J.W. Hov-enier, L.D. Travis (Academic, San Diego 2000) pp. 61–85
104. J.W. Hovenier, H.C. van de Hulst, C.V.M. van der Mee, Conditions for theelements of the scattering matrix. Astron. Astrophys. 157, 301 (1986)
105. H.C. van de Hulst, Light Scattering by Small Particles (Wiley, New York,1957)
106. HyperFun Project, Language and Software for F-rep Modeling, http://www.hyperfun.org
107. M.P. Ioannidou, D.P. Chrissoulidis, Electromagnetic-wave scattering by asphere with multiple spherical inclusions, J. Opt. Soc. Am. A 19, 505 (2002)
108. M.F. Iskander, A. Lakhtakia, Extension of the iterative EBCM to calculatescattering by low-loss or loss-less elongated dielectric objects. Appl. Opt. 23,948 (1984)
109. M.F. Iskander, A. Lakhtakia, C.H. Durney, A new procedure for improvingthe solution stability and extending the frequency range of the EBCM. IEEETrans. Antennas Propagat. 31, 317 (1983)
110. J.D. Jackson, Classical Electrodynamics (Wiley, New York 1998)111. F.M. Kahnert, J.J. Stamnes, K. Stamnes, Application of the extended bound-
ary condition method to homogeneous particles with point-group symmetries,Appl. Opt. 40, 3110 (2001)
112. F.M. Kahnert, J.J. Stamnes, K. Stamnes, Application of the extended bound-ary condition method to particles with sharp edges: A comparison of twosurface integration approaches, Appl. Opt. 40, 3101 (2001)
113. M. Kawano, H. Ikuno, M. Nishimoto, Numerical analysis of 3-D scatteringproblems using the Yasuura method, Trans. IEICE Jpn. 79, 1358 (1996)
114. S. Kawata, M. Ohtsu, M. Irie, Near-Field Optics and Surface Plasmon Polari-tons (Springer, Berlin Heidelberg New York 2001)
115. M. Kerker, The Scattering of Light and Other Electromagnetic Radiation (Aca-demic, San Diego 1969)
116. E.E.M. Khaled, S.C. Hill, P.W. Barber, Scattered an internal intensity of asphere illuminated with a Gaussian beam. IEEE Trans. Antennas Propagat.41, 295 (1993)
117. K.T. Kim, The translation formula for vector multipole fields and the recur-rence relations of the translation coefficients of scalar and vector multipolefields, IEEE Trans. Antennas Propagat. 44, 1482 (1996)
118. K.H. King, L. Tsang, Effective propagation constants in media with denselydistributed dielectric particles of multiple sizes and permittivities, PIER 12,45 (1989)

References 309
119. A.D. Kiselev, V.Yu. Reshetnyak, T.J. Sluckin, Light scattering by opticallyscatterers: T -matrix theory for radial and uniform anisotropies, Phys. Rev.65, 056609 (2002)
120. N.G. Khlebtsov, Orientational averaging of light-scattering observables in theT -matrix approach, Appl. Opt. 31, 5359 (1992)
121. N. Kojekine, I. Hagiwara, V. Savchenko, Software Tools Using CSRBFs forProcessing Scattered Data. Comput. Graph. 27, 309 (2003)
122. J.A. Kong, Electromagnetic Wave Theory (Wiley, New York, 1990)123. B. Krietenstein, P. Thoma, R. Schuhmann, T. Weiland, The perfect boundary
approximation technique facing the big challenge of high precision computa-tion, in Proceedings of the 19th LINAC Conference (Chicago 1998)
124. G. Kristensson, Electromagnetic scattering from buried inhomogeneities – ageneral three-dimensional formalism, J. Appl. Phys. 51, 3486 (1980)
125. G. Kristensson, S. Strom, Scattering from buried inhomogeneities – a generalthree-dimensional formalism, J. Acoust. Soc. Am. 64, 917 (1978)
126. G. Kristensson, A.G. Ramm, S. Strom, Convergence of the T -matrix approachto scattering theory II, J. Math. Phys. 24, 2619 (1983)
127. H. Laitinen, K. Lumme, T-Matrix method for general starshaped particles:First results, J. Quant. Spectrosc. Radiat. Transfer 60, 325 (1998)
128. A. Lakhtakia, The extended boundary condition method for scattering by achiral scatterer in a chiral medium: Formulation and analysis. Optik 86, 155(1991)
129. A. Lakhtakia, Size-dependent Maxwell–Garnett formula from an integral equa-tion formalism. Optik 91, 134 (1992)
130. A. Lakhtakia, General theory of the Purcell-pennypacker scattering approachand its extension to bianisotropic scatterers. Astrophys. J. 394, 494 (1992)
131. A. Lakhtakia, G.W. Mulholland, On two numerical techniques for light scat-tering by dielectric agglomerated structures. J. Res. Natl. Inst. Stand. Technol.98, 699 (1993)
132. A. Lakhtakia, M.F. Iskander, C.H. Durney, An iterative EBCM for solvingthe absorbtion characteristics of lossy dielectric objects of large aspect ratios.IEEE Trans. Microwave Theory Tech. 31, 640 (1983)
133. A. Lakhtakia, V.K. Varadan, V.V. Varadan, Scattering by highly asphericaltargets: EBCM coupled with reinforced orthogonalization. Appl. Opt. 23, 3502(1984)
134. A. Lakhtakia, V.K. Varadan, V.V. Varadan, Scattering of ultrasonic waves byoblate spheroidal voids of high aspect ration. J. Appl. Phys. 58, 4525 (1985)
135. A. Lakhtakia, V.V. Varadan, V.K. Varadan, Scattering and absorption char-acteristics of lossy dielectric, chiral, nonspherical objects. Appl. Opt. 24, 4146(1985)
136. A. Lakhtakia, V.V. Varadan, V.K. Varadan, Field equations, Huygens’s prin-ciple, integral equations, and theorems for radiation and scattering of electro-magnetic waves in isotropic chiral media. J. Opt. Soc. Am. A 5, 175 (1988)
137. L.D. Landau, E.M. Lifshitz, Electrodynamics of Continuous Media (Pergamon,Oxford 1960)
138. M. Lax, Multiple scattering of waves, II, The effective field in dense systems.Phys. Rev. 85, 261 (1952)
139. J.F. Lee, D.K. Sun, Z.J. Cendes, Tangential vector finite elements for electro-magnetic field computations, IEEE Trans. Magn. 27, 4032 (1991)

310 References
140. Y. Leviatan, Z. Baharav, E. Heyman, Analysis of electromagnetic scatteringusing arrays of fictitious sources, IEEE Trans. Antennas Propagat. 43, 1091(1995)
141. L.-W. Li, X.-K. Kang, M.-S. Leong, Spheroidal Wave Functions in Electro-magnetic Theory (Wiley, New York 2002)
142. C. Liu, T. Kaiser, S. Lange, G. Schweiger, Structural resonances in a dielectricsphere illuminated by an evanescent wave. Opt. Commun. 117, 521 (1995)
143. S. Liu, W. Li, M.S. Leong, T.S. Yeo, Scattering by an arbitrarily shaped rota-tionally uniaxial anisotropic object: Electromagnetic fields and dyadic Green’sfunctions, PIER 29, 87 (2000)
144. J.A. Lock, Contribution of high-order rainbows to the scattering of a Gaussianbeam by a spherical particle. J. Opt. Soc. Am. A 10, 693 (1993)
145. J.A. Lock, G. Gouesbet, Rigorous justification of the localized approximationto the beam shape coefficients in generalized Lorenz-Mie theory. I. On-axisbeams, J. Opt. Soc. Am. A 11, 2503 (1994)
146. L. Lorenz, Lysbevaegelsen i og uden for en af plane Lysbolger belyst Kugle.Vidensk. Selk. Skr. 6, 1 (1890)
147. A.C. Ludwig, A new technique for numerical electromagnetics, IEEE AntennasPropagat. Newsletter 3, 40 (1989)
148. A.C. Ludwig, The generalized multipole technique, Comput. Phys. Commun.68, 306 (1991)
149. B. Luk’yanchuk, Laser cleaning (World Scientific, River Edge NJ, 2002)150. D.W. Mackowski, Analysis of radiative scattering from multiple sphere con-
figurations, Proc. R. Soc. London 433, 599 (1991)151. D.W. Mackowski, Discrete dipole moment method for calculation of the T
matrix for nonspherical particles, J. Opt. Soc. Am. A 19, 881 (2002)152. D.W. Mackowski, P.D. Jones, Theoretical investigation of particles having di-
rectionally dependent absorption cross sections, J. Thermophys. Heat Transfer9, 193 (1995)
153. D.W. Mackowski, M.I. Mishchenko, Calculation of the T matrix and the scat-tering matrix for ensemble of spheres, J. Opt. Soc. Am. A 13, 2266 (1996)
154. D.W. Mackowski, R.A. Altenkirch, M.P. Menguc, Internal absorption crosssections in a stratified sphere, Appl. Opt. 29, 1551 (1990)
155. P.A. Martin, P. Ola, Boundary integral equations for the scattering of elec-tromagnetic waves by a homogeneous dielectric obstacle, Proc. Roy. Soc. Ed-inburgh 123, 185 (1993)
156. E. Marx, Single integral equation for wave scattering, J. Math. Phys. 23, 1057(1982)
157. J.R. Mautz, A stable integral equation for electromagnetic scattering fromhomogeneous dielectric bodies, IEEE Trans. Antennas Propagat. 37, 1070(1989)
158. D. Maystre, M. Saillard, G. Tayeb, Special methods of wave diffraction, inPike, Sabatier ed. (2001) Chap. 1.5.6.
159. G. Mie, Beitrage zur Optik truber Medien, speziell kolloidaler Metallosungen,Ann. Phys. 25, 377 (1908)
160. A. Messiah, Quantum Mechanics (North Holland, Amsterdam 1958)161. S.G. Mikhlin, Mathematical Physics. An Advanced Course (North Holland,
Amsterdam 1970)162. M.I. Mishchenko, Light scattering by randomly oriented axially symmetric
particles, J. Opt. Soc. Am. A 8, 871 (1991)

References 311
163. M.I. Mishchenko, Extinction and polarization of transmitted light by partiallyaligned nonspherical grains, Astrophys. J. 37, 561 (1991)
164. M.I. Mishchenko, Light scattering by size-shape distributions of randomly ori-ented axially symmetric particles of a size comparable to a wavelength, Appl.Opt. 32, 4652 (1993)
165. M.I. Mishchenko, D.W. Mackowski, Light scattering by randomly orientedbispheres, Opt. Lett. 19, 1604 (1994)
166. M.I. Mishchenko, L.D. Travis, T -matrix computations of light scattering bylarge spheroidal particles, Opt. Commun. 109, 16 (1994)
167. M.I. Mishchenko, L.D. Travis, Capabilities and limitations of a current FOR-TRAN implementation of the T -matrix method for randomly oriented, rota-tionally symmetric scatterers, J. Quant. Spectrosc. Radiat. Transfer 60, 309(1998)
168. M.I. Mishchenko, J.W. Hovenier, L.D. Travis, Light Scattering by Nonspheri-cal Particles: Theory, Measurements, and Applications (Academic, San Diego2000)
169. M.I. Mishchenko, L.D. Travis, A.A. Lacis, Scattering, Absorption, and Emis-sion of Light by Small Particles (Cambridge University Press, Cambridge2002)
170. M.I. Mishchenko, L.D. Travis, A. Macke, Scattering of light by polydisperse,randomly oriented, finite circular cylinders, Appl. Opt. 35, 4927 (1996)
171. M.I. Mishchenko, L.D. Travis, Maxwell’s equations, electromagnetic waves,and Stokes parameters, In Photopolarimetry in Remote Sensing, ed. by G.Videen, Ya. Yatskiv, M. Mishchenko (Kluwer, Dordrecht, 2004) pp. 1–44
172. M.I. Mishchenko, G. Videen, V.A. Babenko, N.G. Khlebtsov, T. Wriedt, T -matrix theory of electromagnetic scattering by particles and its applications:A comprehensive reference database, J. Quant. Spectrosc. Radiat. Transfer88, 357 (2004)
173. F. Moreno, F. Gonzalez, Light Scattering from Microstructures (Springer,Berlin Heidelberg New York, 2000)
174. A. Moroz, Improvement of Mishchenko’s T -matrix code for absorbing parti-cles, Appl. Opt. 44, 3604 (2005)
175. P.M. Morse, H. Feshbach, Methods of Theoretical Physics (McGraw-Hill, NewYork 1953)
176. G. Mur, A.T. de Hoop, A finite element method for computing three-dimensional electromagnetic fields in inhomogeneous media, IEEE Trans.Magn. 21, 2188 (1985)
177. C. Muller, Foundations of the Mathematical Theory of Electromagnetic Waves(Springer, Berlin Heidelberg New York 1969)
178. B.M. Nebeker, G.W. Starr, E.D. Hirleman, Light scattering from patternedsurfaces and particles on surfaces, In Optical Characterization Techniques forhigh Performance Microelectronic Device Manufacturing II, ed. by J.K. Lowell,R.T. Chen, J.P. Mathur (Proc. SPIE 2638, 1995) pp. 274–284
179. C.P. Neo, V.K. Varadan, V.V. Varadan, Comparison of long-wavelength T -matrix multiple-scattering theory and size-dependent Maxwell–Garnett for-mula, Microwave Opt. Technol. Lett. 23, 1 (1999)
180. D. Ngo, G. Videen, P. Chylek, A Fortran code for the scattering of EM wavesby a sphere with a nonconcentric spherical inclusion, Comput. Phys. Commun.99, 94 (1996)

312 References
181. T.A. Nieminen, H. Rubinsztein-Dunlop, N.R. Heckenberg, Calculation ofthe T -matrix: General considerations and application of the point-matchingmethod, J. Quant. Spectrosc. Radiat. Transfer 79–80, 1019 (2003)
182. L.E. Paramonov, T -matrix approach and the angular momentum theory inlight scattering problems by ensembles of arbitrarily shaped particles, J. Opt.Soc. Am. A 12, 2698 (1995)
183. A. Pasko, Function representation and HyperFun project, in Proceedings of the17th Spring Conference on Computer Graphics (Budmerice, Slovakia 2001)
184. A. Pasko, V. Adzhiev, A. Sourin, V. Savchenko, Function representation ingeometric modeling: Concepts, implementation and applications, Vis. Com-put. 11, 429 (1995)
185. J.I. Peltoniemi, Variational volume integral equation method for electromag-netic scattering by irregular grains, J. Quant. Spectrosc. Radiat. Transfer 55,637 (1996)
186. J.K. Percus, G.J. Yevick, Analysis of classical statistical mechanics by meansof collective coordinates, Phys. Rev. 110, 1 (1958)
187. B. Peterson, S. Strom, T -matrix for electromagnetic scattering from an ar-bitrary number of scatterers and representations of E(3), Phys. Rev. 8, 3661(1973)
188. B. Peterson, S. Strom, Matrix formulation of acoustic scattering from an ar-bitrary number of scatterers, J. Acoust. Soc. Am. 56, 771 (1974)
189. B. Peterson, S. Strom, T -matrix formulation of electromagnetic scatteringfrom multilayered scatterers, Phys. Rev. 10, 2670 (1974)
190. B. Peterson, S. Strom, Matrix formulation of acoustic scattering from multi-layered scatterers, J. Acoust. Soc. Am. 57, 2 (1975)
191. E.R. Pike, P.C. Sabatier, Scattering – Scattering and Inverse Scattering inPure and Applied Science (Academic, London 2001)
192. N.B. Piller, Coupled-dipole approximation for high permittivity materials,Opt. Commun. 160, 10 (1999)
193. N.B. Piller, O.J.F. Martin, Extension of the generalized multipole techniqueto three-dimensional anisotropic scatterers, Opt. Lett. 23, 579 (1998)
194. N.B. Piller, O.J.F. Martin, Increasing the performance of the coupled-dipoleapproximation: A spectral approach, IEEE Trans. Antennas Propagat. 46,1126 (1998)
195. D.C. Prieve, Measurement of colloidal forces with TIRM, Adv. Colloid Inter-face Sci. 82, 93 (1999)
196. S. Pulbere, T. Wriedt, Light Scattering by Cylindrical Fibers with High AspectRatio Using the Null-Field Method with Discrete Sources, Part. Part. Syst.Charact. 21, 213 (2004)
197. E.M. Purcell, C.R. Pennypacker, Scattering and absorption of light by non-spherical dielectric grains, Astrophysical J. 186, 705 (1973)
198. M. Quinten, U. Kreibig, Absorption and elastic scattering of light by particleaggregates, Appl. Opt. 32, 6173 (1993)
199. M. Quinten, A. Pack, R. Wannemacher, Scattering and extinction of evanes-cent waves by small particles, Appl. Phys. 68, 87 (1999)
200. A.G. Ramm, Convergence of the T -matrix approach to scattering theory,J. Math. Phys. 23, 1123 (1982)
201. A.G. Ramm, Scattering by Obstacles (D. Reidel, Dordrecht, 1986)202. R.C. Reddick, R.J. Warmack, T.L. Ferrell, New form of scanning optical mi-
croscopy, Phys. Rev. 39, 767 (1989)

References 313
203. R.C. Reddick, R.J. Warmack, D.W. Chilcott, S.L. Sharp, T.L. Ferrell, Photonscanning tunneling microscopy, Rev. Sci. Instrum. 61, 3669 (1990)
204. N. Riefler, S. di Stasio, T. Wriedt, Structural Analysis of Clusters using Config-urational and Orientational Averaging in Light Scattering Analysis, J. Quant.Spectrosc. Radiat. Transfer 89, 323 (2004)
205. T. Rother, M. Kahnert, A. Doicu, J. Wauer, Surface Green’s function of theHelmholtz equation in spherical coordinates, PIER 38, 47 (2002)
206. R. Schmehl, The coupled-dipole method for light scattering from particles onplane surfaces, Diplomarbeit, Universitat Karlsruhe (TH), Karlsruhe (1994)
207. J.B. Schneider, I.C. Peden, Differential cross section of a dielectric ellipsoid bythe T -matrix extended boundary condition method, IEEE Trans. AntennasPropagat. 36, 1317 (1988)
208. F.M. Schulz, K. Stamnes, J.J. Stamnes, Scattering of electromagnetic wavesby spheroidal particles: A novel approach exploiting the T -matrix computedin spheroidal coordinates, Appl. Opt. 37, 7875 (1998)
209. K. Sertel and J.L. Volakis, Method of moments solution of volume integralequations using parametric geometry modeling, Radio Sci. 37, 1 (2002)
210. A. Sihvola, Electromagnetic Mixing Formulas and Applications (Institution ofElectrical Engineers, London 1999)
211. A. Sihvola, R. Sharma, Scattering corrections for Maxwell–Garnett mixingrule, Microwave Opt. Technol. Lett. 22, 229 (1999)
212. N.C. Skaropoulos, H.W.J. Russchenberg, Light scattering by arbitrarily ori-ented rotationally symmetric particles, J. Opt. Soc. Am. A 19, 1583 (2002)
213. S. Stein, Addition theorems for spherical wave functions, Quart. Appl. Math.19, 15 (1961)
214. J.C. Stover, Optical Scattering: Measurement and Analysis, 2nd Edn. (SPIE,Bellingham, WA, 1995)
215. J.A. Stratton, Electromagnetic Theory (McGraw-Hill, New York, 1941)216. J.A. Stratton, L.J. Chu, Diffraction theory of electromagnetic waves, Phys.
Rev. 56, 99 (1939)217. S. Strom, The scattered field, in Field Representations and Introduction to
Scattering, ed. by V.V. Varadan, A. Lakhtakia, V.K. Varadan (North Holland,Amsterdam, 1991) pp. 143–164
218. S. Strom, W. Zheng, Basic features of the null field method for dielectricscatterers, Radio Sci. 22, 1273 (1987)
219. S. Strom, W. Zheng, The null field approach to electromagnetic scatteringfrom composite objects, IEEE Trans. Antennas Propagat. 36, 376 (1988)
220. C.T. Tai, Dyadic Green Functions in Electromagnetic Theory (Institute ofElectrical and Electronics Engineers, New York, 1993)
221. M.A. Taubenblatt, T.K. Tran, Calculation of light scattering from particlesand structures on a surface by the coupled-dipole method, J. Opt. Soc. Am.A 10, 912 (1993)
222. O.B. Toon, T.P. Ackerman, Algorithms for the calculation of scattering bystratified spheres, Appl. Opt. 20, 3657 (1981)
223. L. Tsang, J.A. Kong, Multiple scattering of electromagnetic waves by ran-dom distributions of discrete scatterers with coherent potential and quantummechanics formalisms, J. Appl. Phys. 51, 3465 (1980)
224. L. Tsang, J.A. Kong, Effective propagation constants for coherent electromag-netics waves in media embedded with dielectric scatterers, J. Apply. Phys. 53,7162 (1982)

314 References
225. L. Tsang, J.A. Kong, Scattering of electromagnetic waves from a half space ofdensely distributed dielectric scatterrers, Radio Sci. 18, 1260 (1983)
226. L. Tsang, J.A. Kong, Scattering of electromagnetic waves from a densemedium consisting of correlated Mie scatterrers with size distributions andapplications to dry snow, J. Electromag. Waves Appl. 6, 265 (1992)
227. L. Tsang, J.A. Kong, T. Habashy, Multiple scattering of acoustic waves byrandom distributions of discrete spherical scatterrers with the quasicrystallineand Percus Yevick approximations, J. Acoust. Soc. Am. 71, 552 (1982)
228. L. Tsang, J.A. Kong, R.T. Shin, Theory of Microwave Remote Sensing (Wiley,New York, 1985)
229. L. Tsang, J.A. Kong, K.H. Ding, Scattering of electromagnetic waves, Theoryand Applicatios (Wiley, New York, 2000)
230. V. Twerski, On scattering of waves by random distributions, I. Free spacescatterer formulation, J. Math. Phys. 3, 700 (1962)
231. V. Twerski, Coherent electromagnetic waves in pair-correlated random distri-butions of aligned scatterers, J. Math. Phys. 19, 215 (1978)
232. N.K. Uzunoglu, P.G. Cottis, J.G. Fikioris, Excitation of electromagnetic wavesin a pyroelectric cylinder, IEEE Trans. Antennas Propagat. 33, 90 (1995)
233. V.K. Varadan, Multiple scattering of acoustic, electromagnetic and elasticwaves, in Acoustic, Electromagnetic and Elatic Wave Scattering-Focus on theT-Matrix Approach, ed. by V.K. Varadan, V.V. Varadan (Pergamon, NewYork 1980) pp. 103–134
234. V.V. Varadan, V.K. Varadan, Acoustic, Electromagnetic and Elastic WavesScattering-Focus on the T-matrix Approach (Pergamon, New York, 1980)
235. V.K. Varadan, V.V. Varadan, Multiple scattering of electromagnetic waves byrandomly distributed and oriented dielectric scatterrers, Phys. Rev. 21, 388(1980)
236. V.K. Varadan, V.N. Bringi, V.V. Varadan, Coherent electromagnetic wavespropagation through randomly distributed dielectric scatterrers, Phys. Rev.19, 2480 (1979)
237. V.V. Varadan, A. Lakhtakia, V.K. Varadan, Scattering by three-dimensionalanisotropic scatterers, IEEE Trans. Antennas Propagat. 37, 800 (1989)
238. V.V. Varadan, A. Lakhtakia, V.K. Varadan, Field representation and Intro-duction to Scattering (Elsevier Science, Amsterdam, 1991)
239. D.A. Varshalovich, A.N. Moskalev, V.K. Khersonskii, Quantum Theory of An-gular Momentum (World Scientific, Singapore, 1988)
240. G. Videen, Light scattering from a sphere on or near a surface, J. Opt. Soc.Am. A 8, 483 (1991)
241. G. Videen, Light scattering from a sphere behind a surface, J. Opt. Soc. Am.A 10, 110 (1993)
242. G. Videen, Scattering from a small sphere near a surface, J. Opt. Soc. Am. A10, 118 (1993)
243. G. Videen, D. Ngo, P. Chylek, R.G. Pinnick, Light scattering from a spherewith an irregular inclusion, J. Opt. Soc. Am. A 12, 922 (1995)
244. G. Videen, R.G. Pinnick, D. Ngo et al., Asymmetry parameters and aggregateparticles, Appl. Opt. 37, 1104 (1998)
245. J.L. Volakis, Alternative field representations and integral equations for mod-eling inhomogeneous dielectrics, IEEE Trans. Microwave Theory Tech. 40, 604(1992)

References 315
246. J.L. Volakis, K. Sertel, E. Jorgensen, R.W. Kindt, Hybride finite element andvolume integral methods for scattering using parametric geometry, CMES 1,11 (2000)
247. D. Wall, Methods of overcoming numerical instabilities associated with theT -matrix method. In Acoustic, Electromagnetic and Elastic Waves Scattering-Focus on the T-matrix Approach, ed. by V.V. Varadan, V.K. Varadan (Perg-amon, New York 1980) pp. 269–286
248. D.S. Wang, P.W. Barber, Scattering by inhomogeneous nonspherical objects,Appl. Opt. 18, 1190 (1979)
249. J.S. Wang, N. Ida, Curvilinear and higher order edge finite elements in elec-tromagnetic field computation, IEEE Trans. Magn. 29, 1491 (1993)
250. Y.M. Wang, W.C. Chew, An efficient algorithm for solution of a scatteringproblem, Micro. Opt. Tech. Lett. 3, 102 (1990)
251. Y.M. Wang, W.C. Chew, A recursive T -matrix approach for the solution ofelectromagnetic scattering by many spheres, IEEE Trans. Antennas Propagat.41, 1633 (1993)
252. R. Wannemacher, A. Pack, M. Quinten, Resonant absorption and scatteringin evanescent fields, Appl. Phys. 68, 225 (1999)
253. P.C. Waterman, Matrix formulation of electromagnetic scattering, Proc. IEEE53, 805 (1965)
254. P.C. Waterman, Scattering by dielectric obstacles. Alta Freq. 38, 348 (1969)255. P.C. Waterman, New formulation of acoustic scattering, J. Acoust. Soc. Am.
45, 1417 (1969)256. P.C. Waterman, Symmetry, unitarity and geometry in electromagnetic scat-
tering, Phys. Rev. 3, 825 (1971)257. P.C. Waterman, Numerical solution of electromagnetic scattering problems,
in Computer Techniques for Electromagnetics, ed. by R. Mittra (Pergamon,Oxford 1973)
258. P.C. Waterman, R. Truell, Multiple scattering of waves, J. Math. Phys. 2, 512(1961)
259. J.P. Webb, B. Forghani, Hierarchical scalar and vector tetrahedra, IEEETrans. Magn. 29, 1495 (1993)
260. T. Weiland, A discretization method for the solution of Maxwell’s equationsfor six-component fields, Electronics and Communications AEU 31, 116 (1977)
261. D.J. Wielaard, M.I. Mishchenko, A. Macke, B.E. Carlson, Improved T -matrixcomputations for large, nonabsorbing and weakly absorbing nonspherical par-ticles and comparison with geometrical-optics approximation, Appl. Opt. 36,4305 (1997)
262. E.P. Wigner, Group Theory and its Application to the Quantum Mechanics ofAtomic Spectra (Academic, New York 1959)
263. W.J. Wiscombe, A. Mugnai, Single scattering from nonspherical Chebyshevparticles: A compendium of calculations, NASA Ref. Publ. NASA RP-1157(1986)
264. W.J. Wiscombe, A. Mugnai, Scattering from nonspherical Chebyshev parti-cles. 2: Means of angular scattering patterns, Appl. Opt. 27, 2405 (1988)
265. K.L. Wong, H.T. Chen, Electromagnetic scattering by a uniaxially anisotropicsphere, Proc. IEEE 139, 314 (1992)
266. T. Wriedt, Electromagnetic Scattering Programs, http://www.t-matrix.de(2006)

316 References
267. T. Wriedt, Generalized Multipole Techniques for Electromagnetic and LightScattering (Elsevier, Amsterdam, 1999)
268. T. Wriedt, Using T-matrix method for light scattering computations by non-axisymmetric particles: Superellipsoids and realistically shaped particles, Part.Part. Syst. Charact 19, 256 (2002)
269. T. Wriedt, U. Comberg, Comparison of computational scattering methods, J.Quant. Spectrosc. Radiat. Transfer 60, 411 (1998)
270. T. Wriedt, A. Doicu, Light scattering from a particle on or a near a surface,Opt. Commun 152, 376 (1998)
271. Y.-L. Xu, Electromagnetic scattering by an aggregate of spheres, Appl. Opt.34, 4573 (1995)
272. Y.-L. Xu, B.A.S. Gustafson, A generalized multiparticle Mie-solution: Furtherexperimental verification, J. Quant. Spectrosc. Radiat. Transfer 70, 395 (2001)
273. Y.-L. Xu, B.A.S. Gustafson, Experimental and theoretical results of light scat-tering by aggregates of spheres, Appl. Opt. 36, 8026 (1997)
274. Y.-L. Xu, Scattering Mueller matrix of an ensemble of variously shaped smallparticles, J. Opt. Soc. Am. A 20, 11, 2093 (2003)
275. R. Zaridze, The Method of Auxiliary Sources (Institute of Radio-Engineeringof Academy of Sciences, Moscow, 1984)
276. W. Zheng, The null field approach to electromagnetic scattering from compos-ite objects: The case with three or more constituents, IEEE Trans. AntennasPropagat. 36, 1396 (1988)
277. W. Zheng, Computation of complex resonance frequencies of isolated compos-ite objects, IEEE Trans. Microwave Theory Tech. 37, 953 (1989)
278. W. Zheng, H. Shao, Electromagnetic resonant scattering by multiple objects,Radio Sci. 26, 191 (1991)
279. W. Zheng, S. Strom, The null field approach to electromagnetic scatteringfrom composite objects: The case of concavo-convex constituents, IEEE Trans.Antennas Propagat. 37, 373 (1989)

Index
absorption cross-section, 51amplitude matrix
definition, 43in terms of T-matrix elements, 59
angular frequency, 2angular functions
computational algorithm, 259definition, 257normalized functions, 258orthogonality relations, 260symmetry relations, 260
anisotropic mediabiaxial, 8negative uniaxial, 8positive uniaxial, 8
asymmetry parameterdefinition, 52orientation-averaged, 80
average quantities of heterogeneousmaterials
electric displacement, 148electric field, 148polarization field, 149
backscattering theorem, 57basis functions
constant pulse-functions, 195edge-based, 195node-based, 195
Bayes’ rule, 152Bessel differential equation, 254boundary conditions for
normal component of electricdisplacement, 4
normal component of magneticinduction, 4
tangential component of electric field,4
tangential component of magneticfield, 4
boundary-value problem forcomposite particles, 140homogeneous, isotropic particles, 85inhomogeneous particles, 106isotropic, chiral particles, 102multiple particles, 124uniaxial anisotropic particles, 104
chirality parameter, 8Clebsch–Gordan coefficients
computational algorithm, 274symmetry relations, 274
coherency extinction matrix, 48coherency phase matrix, 44coherency vector of
incident field, 13scattered field, 44total field, 46
complex amplitude vector, 10complex polarization unit vector, 10complex Poynting’s vector, 4conditional average
of the scattered field coefficients, 152with one and two fixed particles, 152
conditional density withone fixed particle, 152two fixed particles, 152

318 Index
configurational average ofreflected field, 162statistical quantities, 152
constitutive relations foranisotropic media, 7chiral media, 8isotropic media, 6
continuity equation, 2current density, 2
degree of polarization, 15dichroism, 46differential equation for spherical
harmonics, 254differential scattering cross-section
definition, 42for parallel and perpendicular
polarizations, 42normalized, 42orientation-averaged, 81
diffusion limited aggregation, DLA, 236diffusion limited cluster cluster
aggregation, DLCCA, 236dimension of T matrix for
composite particles, 144homogeneous, isotropic particles, 96layered particles, 119multiple particles, 132
dipole moment, 149, 197discrete dipole approximation, DDA,
192discrete sources method, DSM, 189dispersion relation for
anisotropic media, 24isotropic media, 26isotropic, chiral media, 31uniaxial anisotropic media, 25
dyadic Green’s functionasymptotic behavior, 38definition, 37differential equation, 38expansion in terms of vector plane
waves, 175dyadic kernel for
discrete dipole approximation, 197volume integral equation method, 195
effective loss tangent, 247effective permittivity, 149
effective wave number, 157effective wave vector, 153efficiencies for
absorption, 51extinction, 51scattering, 51
electric charge density, 2electric conductivity, 6electric dipole operator, 97electric displacement, 2electric field, 2electric permittivity, 6electric susceptibility, 6electromagnetics programs
CST Microwave Studio, 198discrete dipole approximation, DDA,
192multiple multipole method, MMP,
189T-matrix method, 183, 188
ellipsometric parametersellipticity angle, 11orientation angle, 11vibration ellipse, 11
Euler angles, 15evanescent waves scattering, 172Ewald-Oseen extinction theorem, 161exciting field, 149extinction cross-section
definition, 51in terms of T-matrix elements, 60orientation-averaged, 72
extinction matrixdefinition, 48orientation-averaged, 75
extinction theorem, 41
far-field patternsdefinition, 41in terms of T-matrix elements, 58integral representations, 41
Faraday’s induction lawdifferential form, 2discrete form, 198integral form, 198
finite integration technique, FIT, 198fractal dimension, 234fractal pre-factor, 234

Index 319
Fresnell reflection coefficients, 166Fresnell transmission coefficients, 172
Gauss’ electric field lawdifferential form, 2integral form, 199
Gauss’ magnetic field lawdifferential form, 2discrete form, 199integral form, 199
Gaussian beambeam parameter, 18Davis approximation, 18diffraction length, 18generalized localized approximation,
18waist radius, 18
generalized Lorentz–Lorenz law, 158generalized multiparticle Mie-solution,
137generalized spherical functions
definition, 272orthogonality relation, 273recurrence relations, 273symmetry relations, 272
Green’s functiondefinition, 261differential equation, 36spherical waves expansion, 261
Green’s second vector theorem, 34Green’s second vector-dyadic theorem,
38
Helmholtz equation, 253Huygens principle, 41
image coordinate system, 170interacting field, 167internal fields expansions in
isotropic chiral media, 32uniaxial anisotropic media, 27
joint density function, 152jump relations for
curl of a vector potential, 97double curl of a vector potential, 97
Kasterin’s representation, 291
Legendre differential equation, 254
Legendre functionsassociated, 257computational algorithm, 258normalized functions, 258orthogonality relation, 260polynomials, 257recurrence relations, 257special values, 258symmetry relation, 260
logarithmic derivatives coefficientscomputational algorithm, 101definition, 100
long-wavelength dispersion equation,160
magnetic dipole operator, 97magnetic field, 2magnetic induction, 2magnetic media
diamagnetic, 6paramagnetic, 6
magnetic permeability, 6magnetic susceptibility, 6magnetization vector, 6Maxwell’s equation
discrete form, 200in frequency domain, 2in time domain, 1
Maxwell–Ampere lawdifferential form, 2integral form, 199
Maxwell-Garnett formula, 149, 197mean direction of propagation of the
scattered fielddefinition, 52orientation-averaged, 80
multiple multipole method, MMP, 189
normalized phase velocity, 247null-field equations for
complex particles, 146composite particles with
distributed sources, 145localized sources, 141
homogeneous, isotropic particles withdistributed sources, 90localized sources, 86
inhomogeneous particles withdistributed sources, 120

320 Index
null-field equations for (Continued)localized sources, 107
layered particles, 115multiple particles, 127
null-field method with distributedsources for
composite particles, 145homogeneous, isotropic particles, 89layered particles, 120
Ohm’s law, 6optical theorem, 53Ornstein–Zernike equation, 163orthogonalization method, 92
pair distribution functiondefinition, 152for the hole-correction approximation,
163Percus–Yevick, 163
permeability tensor, 7permittivity tensor, 7phase function
definition, 52normalization condition, 52
phase matrix, 44plane waves
asymptotic representation, 264spherical waves expansion, 262
polarizability dyad, 196polarizability scalar, 149, 197polarization angle, 12polarization unit vector for
circularly polarized waves, 13linearly polarized waves, 12
polarization vector, 6polarized waves
circularly, 13ellipticaly, 12linearly, 12
Poynting’s theorem, 4Poynting’s vector, 4probability density function
configurational, 151of particle orientations, 157
Q matrixfor isotropic, chiral particles, 103for spherical particles, 99
for uniaxial anisotropic particles, 105with respect to a single origin, 88with respect to two origins, 112
quasi-crystalline approximation, 153quasi-plane waves
definition, 262spherical waves expansion, 262
radius of gyration, 234reciprocity
amplitude matrix, 57extinction matrix, 57far-field pattern, 56phase matrix, 57tensor scattering amplitude, 56
recursive aggregate T-matrix algorithm,138
reference framebeam coordinate system, 43global coordinate system, 42
reflected vector plane wave, 165reflected vector spherical harmonics,
171reflected vector spherical wave functions
integral representations, 168, 169series representations, 167simplified integral representations,
170reflection matrix, 168refractive index, 7rotation matrix
definition, 275symmetry relations, 275
scalar addition coefficientscomputational algorithm, 279integral representations, 277, 278series representations, 277, 278
scaling law, 234scattering characteristic, 246
Ag-sphere on plane surface, 246axisymmetric particles, 201Cassini particle, 210chiral cube, 215chiral sphere, 203complex particle, 244composite particle, 238, 239composite spheroid, 240concentrically layered sphere, 229

Index 321
cube shaped particle, 220cut sphere, 218diamond sphere on plane surface, 246dielectric cube, 213Gaussian beam scattering, 205hexagonal prism, 213inhomogeneous sphere, 224layered spheroid, 226monodisperse aggregate, 237oblate cylinder, 210oblate spheroid, 226perfectly conducting cube, 215perfectly conducting spheroid, 202polydisperse aggregate, 237prolate spheroid, 202reconstructed cube, 220Si-sphere on plane surface, 246sphere with spherical inclusion, 222spheroid on plane surface, 245system of particles, 230uniaxial anisotropic cube, 213uniaxial anisotropic ellipsoid, 213
scattering cross-sectiondefinition, 51in terms of T-matrix elements, 61orientation-averaged, 74
scattering matrixdefinition, 67for macroscopically isotropic media,
67for mirror-symmetric media, 68orientation-averaged, 79relation to phase matrix, 68
Silver–Muller radiation condition, 34single scattering albedo, 51Snell’s law, 166spectral amplitudes of
incident field, 176internal field, 176scattered field, 178
speed of light, 7spherical functions
Bessel, 254computational algorithm, 256Hankel, 254Neumann, 254recurrence relations, 254special values, 255Wronskian relation, 255
spherical harmonicsdefinition, 262orthogonality relation, 262
spherical particlesconcentrically layered, 122homogeneous, 99
spherical wave functionsintegral representations, 262radiating, 261regular, 261rotation addition theorem, 271translation addition theorem, 276
spherical waves expansion ofGaussian beams, 19vector plane waves, 16
stationary point method, 55, 291Stokes parameters, 14Stokes rotation matrix, 14Stokes vector
of incident field, 13of scattered field, 45transformation under rotation, 14
Stratton–Chu representation theoremfor
radiating fields, 34regular fields, 35
superposition T-matrix method, 132surface charge density, 4surface current, 3surface fields approximations for
homogeneous, isotropic particles, 86inhomogeneous particles, 109isotropic, chiral particles, 102multiple particles, 128uniaxial anisotropic particles, 105
surface integral equationdirect method, 98indirect method, 98
T matrixconvergence of calculation, 96definition, 58for complex particles, 147for composite particles, 144for concentrically layered spheres, 123for homogeneous, isotropic particles,
89for inhomogeneous particles, 111for isotropic, chiral particles, 103

322 Index
for layered particles, 116for multiple particles, 130for uniaxial anisotropic particles, 105orientation-averaged, 71recurrence relation for layered
particles, 117rotation addition theorem, 70symmetries for special shapes, 93symmetry relation, 65unitarity condition, 64
T operator fora plane surface, 180an arbitrary surface, 179
tensor scattering amplitudedefinition, 43in terms of T-matrix elements, 59
time-averaged powerabsorbed by the particle, 50incident, 50scattered by the particle, 50
time-averaged Poynting vector, 5total electric displacement, 2transmission boundary-value problem,
33transmitted vector plane wave, 172
vector addition coefficientscomputational algorithm, 285integral representations, 281, 284series representations, 282, 284symmetry relations, 286, 287
vector plane wavesalternative representations, 175definition, 174orthogonality relations, 174
vector potential, 97vector spherical harmonics
definition, 264of left- and right- handed type, 265orthogonality relations, 264
vector spherical wave functionsasymptotic representations, 266distributed, 269in terms of vector spherical
harmonics, 266integral representations, 268left- and right-handed type, 32orthogonality relations, 266, 268quasi-spherical
Cartesian components, 29integral representations, 27
radiating, 266regular, 266rotation addition theorem, 275translation addition theorem, 280
vector wave equation, 253volume element complex, 198volume integral equation method, 192volume integral representation, 40
wave number, 7Wigner D-functions
addition theorem, 273definition, 271
Wigner d-functionsaddition theorem, 274definition, 271orthogonality relation, 272symmetry relations, 272unitarity condition, 274

Springer Series in
optical sciencesVolume 1
1 Solid-State Laser EngineeringBy W. Koechner, 5th revised and updated ed. 1999, 472 figs., 55 tabs., XII, 746 pages
Published titles since volume 90
90/1 Raman Amplifiers for Telecommunications 1Physical PrinciplesBy M.N. Islam (Ed.), 2004, 488 figs., XXVIII, 328 pages
90/2 Raman Amplifiers for Telecommunications 2Sub-Systems and SystemsBy M.N. Islam (Ed.), 2004, 278 figs., XXVIII, 420 pages
91 Optical Super ResolutionBy Z. Zalevsky, D. Mendlovic, 2004, 164 figs., XVIII, 232 pages
92 UV-Visible Reflection Spectroscopy of LiquidsBy J.A. Raty, K.-E. Peiponen, T. Asakura, 2004, 131 figs., XII, 219 pages
93 Fundamentals of Semiconductor LasersBy T. Numai, 2004, 166 figs., XII, 264 pages
94 Photonic CrystalsPhysics, Fabrication and ApplicationsBy K. Inoue, K. Ohtaka (Eds.), 2004, 209 figs., XV, 320 pages
95 Ultrafast Optics IVSelected Contributions to the 4th International Conferenceon Ultrafast Optics, Vienna, AustriaBy F. Krausz, G. Korn, P. Corkum, I.A. Walmsley (Eds.), 2004, 281 figs., XIV, 506 pages
96 Progress in Nano-Electro Optics IIIIndustrial Applications and Dynamics of the Nano-Optical SystemBy M. Ohtsu (Ed.), 2004, 186 figs., 8 tabs., XIV, 224 pages
97 MicroopticsFrom Technology to ApplicationsBy J. Jahns, K.-H. Brenner, 2004, 303 figs., XI, 335 pages
98 X-Ray OpticsHigh-Energy-Resolution ApplicationsBy Y. Shvyd’ko, 2004, 181 figs., XIV, 404 pages
99 Mono-Cycle Photonics and Optical Scanning Tunneling MicroscopyRoute to Femtosecond Ångstrom TechnologyBy M. Yamashita, H. Shigekawa, R. Morita (Eds.) 2005, 241 figs., XX, 393 pages
100 Quantum Interference and CoherenceTheory and ExperimentsBy Z. Ficek and S. Swain, 2005, 178 figs., XV, 418 pages
101 Polarization Optics in TelecommunicationsBy J. Damask, 2005, 110 figs., XVI, 528 pages
102 LidarRange-Resolved Optical Remote Sensing of the AtmosphereBy C. Weitkamp (Ed.), 161 figs., XX, 416 pages
103 Optical Fiber Fusion SplicingBy A.D. Yablon, 2005, 137 figs., XIII, 306 pages
104 Optoelectronics of Molecules and PolymersBy A. Moliton, 2005, 229 figs., 592 pages
105 Solid-State Random LasersBy M. Noginov, 2005, 131 figs., XII, 238 pages

Springer Series in
optical sciences106 Coherent Sources of XUV Radiation
Soft X-Ray Lasers and High-Order Harmonic GenerationBy P. Jaegle, 2006, 332 figs., XIII, 416 pages
107 Optical Frequency-Modulated Continuous-Wave (FMCW) InterferometryBy J. Zheng, 2005, 137 figs., XVIII, 254 pages
108 Laser Resonators and Beam PropagationFundamentals, Advanced Concepts and ApplicationsBy N. Hodgson and H. Weber, 2005, 587 figs., XXVI, 794 pages
109 Progress in Nano-Electro Optics IVCharacterization of Nano-Optical Materials and Optical Near-Field InteractionsBy M. Ohtsu (Ed.), 2005, 123 figs., XIV, 206 pages
110 Kramers–Kronig Relations in Optical Materials ResearchBy V. Lucarini, J.J. Saarinen, K.-E. Peiponen, E.M. Vartiainen, 2005,37 figs., X, 162 pages
111 Semiconductor LasersStability, Instability and ChaosBy J. Ohtsubo, 2005, 169 figs., XII, 438 pages
112 Photovoltaic Solar Energy GenerationBy A. Goetzberger and V.U. Hoffmann, 2005, 139 figs., XII, 234 pages
113 Photorefractive Materials and Their Applications 1Basic EffectsBy P. Gunter and J.P. Huignard, 2006, 169 figs., XIV, 421 pages
114 Photorefractive Materials and Their Applications 2MaterialsBy P. Gunter and J.P. Huignard, 2005, 100 figs., approx. XII, 300 pages
115 Photorefractive Materials and Their Applications 3ApplicationsBy P. Gunter and J.P. Huignard, 2005, 100 figs., approx. XII, 300 pages
116 Spatial Filtering VelocimetryFundamentals and ApplicationsBy Y. Aizu and T. Asakura, 2006, 112 figs., XII, 212 pages
117 Progress in Nano-Electro-Optics VNanophotonic Fabrications, Devices, Systems, and Their Theoretical BasesBy M. Ohtsu (Ed.), 2006, 122 figs., XIV, 188 pages
118 Mid-infrared Semiconductor OptoelectronicsBy A. Krier (Ed.), 2006, 443 figs., XVIII, 751 pages
119 Optical InterconnectsThe Silicon ApproachBy L. Pavesi and G. Guillot (Eds.), 2006, 265 figs., XXII, 389 pages
120 Relativistic Nonlinear ElectrodynamicsInteraction of Charged Particles with Strong and Super Strong Laser FieldsBy H.K. Avetissian, 2006, 23 figs., XIII, 333 pages
121 Thermal Processes Using Attosecond Laser PulsesWhen Time MattersBy M. Kozlowski and J. Marciak-Kozlowska, 2006, approx. 46 figs., XII, 232 pages
122 Modeling and Analysis of Transient Processes in Open Resonant StructuresNew Methods and TechniquesBy Y.K. Sirenko, N.P. Yashina, and S. Strom, 2007, approx. 110 figs., XIV, 346 pages
123 Wavelength Filters in Fibre OpticsBy H. Venghaus (Ed.), 2007, approx. 210 figs., XXIV, 451 pages
124 Light Scattering by Systems of ParticlesNull-Field Method with Discrete Sources: Theory and ProgramsBy A. Doicu, T. Wriedt, and Y.A. Eremin, 2006, 123 figs., XIII, 324 pages