Lectures Weeks 1-4
34
MATH 3700 Ordinary Differential Equation Notes 1 Ex is tence a nd Uniq ueness We are interested in the following differential equation y ′ = f (x, y), y (x 0 ) = y 0 . You have already met a theorem about existence and uniqueness but we will go into this in more detail here. 1.1 Exampl es We will begin with some examples. These illustrate various aspects of the existence and uniquen ess theorem. 1. y ′ = y 2 2. y ′ = y 2/3 1
-
Upload
leopard9987 -
Category
Documents
-
view
223 -
download
0
Transcript of Lectures Weeks 1-4

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 1/34

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 2/34

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 3/34

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 4/34
1.4 Picard’s Theorem
Let f (x, y) and ∂f/∂y be continuous functions of x and y on a closed rectangle R withsides parallel to the axes. If (x0, y0) is any interior point of R then there exists a numberh > 0 with the property that the initial value problem
y′ = f (x, y), y(x0) = y0
has one and only one solution y = y(x) on the interval |x − x0| ≤ h.Proof . We write yn as
yn(x) = y0(x) +n
m=1
[ym − ym−1]
We therefore define
y(x) = y0(x) +∞
m=1
[ym − ym−1]
and we need to show that
1. y(x) exists
2. y(x) is a solution of the DE
3. y(x) is the only solution of the DE
We begin by proving (1) that y(x) exists, i.e. we need to show that the series aboveconverges.
We know that|f (x, y)| ≤ M
| ∂
∂yf (x, y)| ≤ K
on the interval R. The mean value theorem tell us that
|f (x, y1) − f (x, y2)| ≤ ∂
∂y f (x, y⋆) |y1 − y2|
for some number y⋆ between y1 and y2. Therefore
|f (x, y1)− f (x, y2)| ≤ K |y1 − y2|
We define h < 1/K and define R′ = {(x, y), |x−x0| ≤ h, |y−y0| ≤ Mh}. We requirethat h is sufficiently small that R ′ lies inside R.
We can show that all of the functions yn are in the interval R′.Define a = max |y1(x) − y0(x)|. Then
|f (t, y1)− f (t, y0)| ≤ K |y1(x) − y0(x)| ≤ Ka
4

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 5/34

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 6/34
1.5 Lipschitz condition
If we look at the proof for the existence and uniqueness solution we see that we actuallyonly required that
|f (x, y1)− f (x, y2)| ≤ K |y1 − y2|This is a weaker condition than requiring that the function f (x, y) has a continuouspartial derivative with respect to y and the existence and uniqueness theorem can im-mediately be generalized.
Definition A function is Lipschitz continuous in an interval I if
|f (y1)− f (y0)| ≤ C |y1 − y0|
for all y1, y0
∈I for some C > 0.
What does it mean to be Lipschitz continuous? It is a stronger condition thancontinuity but it does not imply that the derivative is bounded. Consider the examples
1. f (y) = |y|
2. f (y) = y2/3
6

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 7/34
We can extend the theorem to the case where f is only Lipshitz continuous withrespect to y. We will prove a slightly different version of the theorem
We have the following theorem: If f (y) is differentiable in I then f is Lipschitzcontinuous with constant C if and only if
supy∈I
∂f
∂y(y)
≤ C.
Proof:
7

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 8/34
1.6 Existence and Uniqueness for the Case of Lipshitz Conti-
nuity
The existence and uniqueness proof can be generalized in many ways. Let us considerthe following theorem.
Theorem Let f (x, y) be a continuous function that satisfies a Lipshitz condition
|f (x, y1)− f (x, y2)| ≤ K |y1 − y2|
on a strip defined by a ≤ x ≤ b and −∞ < y < ∞ (note that this is not true for y ′ = y2).Then, if (x0, y0) is any point in the strip, then the initial value problem
y′ = f (x, y), y(x0) = y0.
has a unique solution on the interval a ≤ x ≤ b.Proof We define the constants
M 0 = |y0|, M 1 = max |y1(x)|, M = M 0 + M 1
It follows that |y0(x)| ≤ M and |y1(x) − y0(x)| ≤ M . If x0 ≤ x ≤ b it follows that
|y2(x)− y1(x)| =
xx0
f (t, y1)− f (t, y0) dt
≤ x
x0 |f (t, y1)− f (t, y0)| dt
≤ K
xx0
|y1(x) − y0(x)| dt
≤ KM (x− x0)
Likewise
8

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 9/34

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 10/34
Therefore we obtain the following result. The difference between the true solution yand the Picard Iterate yn is
|y(x)− yn(x)| ≤ M (K (x− x0))n
n! eK (x−x0)
Note this is an upper bound and the actual iterates may be much more accurate. Thereare also bounds on the Picard iterates which can be found for the first case we considered.
Example Consider the initial value problem
y′ = x2y; y(0) = 1.
one the interval 0 ≤ x ≤ 1. Find the Picard iterates y1, y2 etc. Find an upper boundon the error for these iterates.
10

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 11/34
2 Autonomous Systems
A system of DE’s is autonomous if the right hand side does not depend on the variableof differentiation. In two dimensions they can be written as
dx
dt = f (x, y)
dy
dt = g(x, y)
Example
dx
dt
= 0.5x
−0.4xy
dy
dt = −y + 0.2xy
2.1 Direction fields
At each point in the (x, y) plane we can determine the slope of the solution. We canthen plot these slopes to give a direction field.
So to sketch solution curves to DE,
1. plot direction field, then
2. starting at some initial point, sketch a smooth curve that follows vectors in direc-tion field.
11

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 12/34
Example: Sketch some representative solutions for the system
dx
dt = y
dy
dt = sin(x)
The direction field is given below.
12

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 13/34
2.2 Equilibrium solutions
The point (x0, y0) is an equilibrium point for the system
dx
dt = f (x, y)
dy
dt = g(x, y)
if f (x0, y0) = g(x0, y0) = 0.Example 1
dx
dt = 2x + y
dy
dt = 2y + x
Example 2
dx
dt = x + y
dy
dt = y (2 − x)
Behaviour of solutions near equilibriums can be observed with pplane . Note that
1. direction of vectors in direction field changes dramatically near an equilibriumpoint, and
2. solutions passing near an equilibrium go very slowly (because all components of
vector field → 0 near an equilibrium).
13

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 14/34

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 15/34
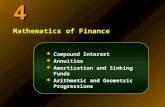
Example Determine the behaviour of solutions to the system
dx
dt = −4 −2−1 −3
x.
dx/dt = − 4 x − 2 y dy/dt = − x − 3 y
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
y
The equilibrium point at the origin in this type of system is called a sink. If theflow is reversed then the equilibrium is a source.
15

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 16/34

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 17/34
Linear systems with repeated eigenvalues
Example Consider the system
dx
dt =
2 00 2
x
dx/dt = 2 x dy/dt = 2 y
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
y
17

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 18/34
Example Consider the system
dx
dt = −5 08 −5
x.
dx/dt = − 5 xdy/dt = 8 x − 5 y
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
x
y
Note that system has only one straight line solution.
18

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 19/34
Example : Consider the one-parameter family of linear systems
dx
dt =
1 2a 0
x
where a is a parameter. Determine the type of equilibrium at the origin for all values of a. Sketch the phase portrait for representative values of a.
Eigenvalues of matrix
A =
1 2a 0
are
12 ± 1
2√ 1 + 8a
so the type of equilibrium at the origin depends on a. Also, det(A) = −2a and trace(A) =1.
19

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 20/34

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 21/34
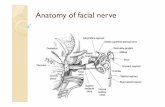
Example 1 Analyze the equilibrium points for
dx
dt = 2− x− y
dy
dt = x2 − y
dx/dt = 2 − x − y
dy/dt = x2 − y
−4 −3 −2 −1 0 1 2 3 4
−2
−1
0
1
2
3
4
5
6
x
y
21

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 22/34
Unfortunately, linearization does not always work. In particular, if the Jacobianmatrix has a zero eigenvalue or a purely imaginary eigenvalue, then we cannot predict
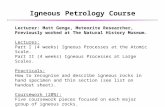
the behaviour in the nonlinear system based on linearization alone.Example
dx
dt = −x3
dy
dt = −y + y2
dx/dt = − x3
dy/dt = − y + y2
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−1
−0.5
0
0.5
1
1.5
2
x
y
Notice that in this phase portrait, (0, 0) looks like a sink and (0, 1) looks like a saddle.
These results were not predicted by the corresponding linearized systems. Linearizationdoes not work in these cases because of the zero eigenvalues of the Jacobian.
22

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 23/34

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 24/34
3 Hamiltonian and Lyapunov functions
3.1 PendulumThe equation for a pendulum which is free to rotate is given by
d2θ
dt2 = −g
l sin θ
We write this (assuming g/l = 1) as
dx
dt = y
dy
dt = − sin(x)
24

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 25/34
3.2 Hamiltonian Systems
A system is Hamiltonian if it can be written in the form
dx
dt =
∂H
∂y
dy
dt = −∂H
∂x
If we consider the equations for the pendulum we can see that H = − cos(x) + y2/2 givesthe desired equations.
One important consequence of this is that the quantity H must be conserved for oursystem. This has important consequences.
25

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 26/34
3.3 KdV equation
The KdV (Korteweg de Vries) equations is one of the most important nonlinear partialdifferential equations. When looking for travelling wave solutions the problem is reducedto the following (assuming again all constants are one)
dx
dt = y
dy
dt = x − x2
What is the Hamiltonian for this system.
26

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 27/34

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 28/34
3.5 Damped pendulum
We can modify the pendulum problem by including damping. This leads to
dx
dt = y
dy
dt = − sin(x) − y/10
28

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 29/34
3.6 Lyapunov function
We assume that we have a dynamical system
dx
dt = f (x, y)
dy
dt = g(x, y)
We assume we have an equilibrium point at (0 , 0) (we can always transform any otherequilibrium point to the origin). A Lyapunov function is a function with the propertiesthat
1. V (x, y)
≥0
2. V (0, 0) = 0
3. dV dt ≤ 0 along solutions of the DE, in some neighbourhood of the equilibrium point.
If such a function can be found then the equilibrium point must be stable.If the function V is strictly decreasing then all solutions in the neighbourhood tend
to the equilibrium point.Note that in general it is not easy to find a Lyapunov function.
29

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 30/34
Consider the equation for a spring with linear damping.
md2y
dt2 + cdy
dt + ky = 0
30

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 31/34
Consider the system
dx
dt = −2xy
dy
dt = x2 − y3
Try a function of the formV (x, y) = ax2m + by2n
31

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 32/34

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 33/34
4.2 Pitchfork Bifurcation
In this bifurcation a source (or sink) is transformed into three equilibriums, two sources(sinks) and one saddle.
dx
dt = αx− x3
dy
dt = −y
33

8/12/2019 Lectures Weeks 1-4
http://slidepdf.com/reader/full/lectures-weeks-1-4 34/34
4.3 Hopf Bifurcation
In this bifurcation the real part of complex eigenvalues for the linearized system changefrom negative to positive. In this case, under fairly general conditions a closed periodicorbit is created.
dx
dt = 1 + x2y − (α + 1)x
dy
dt = αx − x2y