Lecture2 Models

of 40
-
Upload
onesetiaji-setiajione -
Category
Documents
-
view
228 -
download
0
Transcript of Lecture2 Models
-
8/2/2019 Lecture2 Models
1/40
EE392m - Winter 2003 Control Engineering 2-1
Lecture 2 - Modeling and Simulation Model types: ODE, PDE, State Machines, Hybrid
Modeling approaches: physics based (white box)
input-output models (black box)
Linear systems
Simulation
Modeling uncertainty
-
8/2/2019 Lecture2 Models
2/40
EE392m - Winter 2003 Control Engineering 2-2
Goals Review dynamical modeling approaches used for control
analysis and simulation Most of the material us assumed to be known
Target audience
people specializing in controls - practical
-
8/2/2019 Lecture2 Models
3/40
EE392m - Winter 2003 Control Engineering 2-3
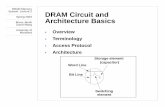
Modeling in Control Engineering Control in a
system
perspective
Physical system
Measurement
system
Sensors
Control
computing
Control
handles
Actuators
Physicalsystem
Control analysis
perspective
Control
computing
System model Controlhandle
model
Measurement
model
-
8/2/2019 Lecture2 Models
4/40
EE392m - Winter 2003 Control Engineering 2-4
Models Model is a mathematical representations of a system
Models allow simulating and analyzing the system Models are never exact
Modeling depends on your goal
A single system may have many models
Always understand what is thepurpose of the model
Large libraries of standard model templates exist
A conceptually new model is a big deal
Main goals of modeling in control engineering
conceptual analysis
detailed simulation
-
8/2/2019 Lecture2 Models
5/40
EE392m - Winter 2003 Control Engineering 2-5
),,(
),,(
tuxgy
tuxfx
=
=&
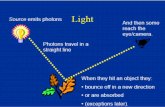
Modeling approaches Controls analysis uses deterministic models. Randomness and
uncertainty are usually not dominant.
White box models: physics described by ODE and/or PDE
Dynamics, Newton mechanics
Space flight: add control inputs u and measured outputs y
),( txfx =&
-
8/2/2019 Lecture2 Models
6/40
EE392m - Winter 2003 Control Engineering 2-6
vr
tFr
rmv pert
=
+=
&
& )(3
Orbital mechanics example
Newtons mechanics
fundamental laws
dynamics
=
3
2
1
3
2
1
v
v
v
r
r
r
x),( txfx =&
Laplace
computational dynamics(pencil & paper computations)
deterministic model-based
prediction1749-1827
1643-1736 rv
-
8/2/2019 Lecture2 Models
7/40
EE392m - Winter 2003 Control Engineering 2-7
Orbital mechanics example
Space flight mechanics
Control problems: u - ?
=
3
2
1
3
2
1
v
v
v
r
r
r
x
),,(
),,(
tuxgy
tuxfx
=
=&
=
)(
)(
r
ry
vr
tutFr
rmv pert
=
++=
&
& )()(3
Thrust
state
model
observations /
measurementscontrol
-
8/2/2019 Lecture2 Models
8/40
EE392m - Winter 2003 Control Engineering 2-8
Gene
expression
model
-
8/2/2019 Lecture2 Models
9/40
EE392m - Winter 2003 Control Engineering 2-9
),,(
),,()(
tuxgy
tuxfdtx
=
=+
Sampled Time Models Time is often sampled because of the digital computer use
computations, numerical integration of continuous-time ODE
digital (sampled time) control system
Time can be sampled because this is how a system works
Example: bank account balance
x(t) - balance in the end of day t
u(t) - total of deposits and withdrawals that day
y(t) - displayed in a daily statement
Unit delay operatorz-1:z-1x(t) =x(t-1)
( ) kdttuxfdtxdtx =++ ),,,()(
xytutxtx
=
+=+ )()()1(
-
8/2/2019 Lecture2 Models
10/40
EE392m - Winter 2003 Control Engineering 2-10
Finite state
machines TCP/IP State Machine
-
8/2/2019 Lecture2 Models
11/40
EE392m - Winter 2003 Control Engineering 2-11
Hybrid systems Combination of continuous-time dynamics and a state machine
Thermostat example
Tools are not fully established yet
off on
72=x
75=x
70=x
70
=
xKxx&
75
)(
=
x
xxhKx&
-
8/2/2019 Lecture2 Models
12/40
EE392m - Winter 2003 Control Engineering 2-12
PDE models Include functions of spatial variables
electromagnetic fields
mass and heat transfer
fluid dynamics
structural deformations
Example: sideways heat equation
1
2
2
0)1(;)0(
=
=
==
=
xx
Ty
TuT
x
Tk
t
T
yheat flux
x
Toutside=0Tinside=u
-
8/2/2019 Lecture2 Models
13/40
EE392m - Winter 2003 Control Engineering 2-13
Black-box models Black-box models - describe P as an operator
AA, ME, Physics - state space, ODE and PDE
EE - black-box, ChE - use anything
CS - state machines, probablistic models, neural networks
P
x
u
input data
y
output data
internal state
-
8/2/2019 Lecture2 Models
14/40
EE392m - Winter 2003 Control Engineering 2-14
Linear Systems Impulse response
FIR model IIR model
State space model
Frequency domain Transfer functions
Sampled vs. continuous time
Linearization
-
8/2/2019 Lecture2 Models
15/40
EE392m - Winter 2003 Control Engineering 2-15
Linear System (black-box) Linearity
Linear Time-Invariant systems - LTI
)()( 11 yuP
)()( TyTuP
)()()()( 2121 ++ byaybuauP
)()( 22 yuP
Pu
t
y
t
-
8/2/2019 Lecture2 Models
16/40
EE392m - Winter 2003 Control Engineering 2-16
Impulse response Response to an input impulse
Sampled time: t= 1, 2, ...
Control history = linear combination of the impulses system response = linear combination of the impulse responses
( ) )(*)()()(
)()()(
0
0
tuhkukthty
kukttu
k
k
==
=
=
=
)()( hP
u
t t
-
8/2/2019 Lecture2 Models
17/40
EE392m - Winter 2003 Control Engineering 2-17
Linear PDE System Example Heat transfer equation,
boundary temperature input u
heat flux outputy
Pulse response and step response
00. 2
0. 40. 6
0. 81 0
0. 2
0 .4
0. 6
0 .8
1
0
0. 2
0. 4
0. 6
0. 8
1
TIME
TEMPER ATURE
COORDINATE
0)1()0(
2
2
==
=
TTux
Tk
t
T
1=
=
xx
Ty
0 20 40 60 80 1000
2
4
6x 10
-2
TIME
HEATFLUX
PULSE RESP ONSE
0 20 40 60 80 1000
0.2
0.4
0.6
0.8
1
TIME
HEATFLUX
STEP RESPONSE
-
8/2/2019 Lecture2 Models
18/40
EE392m - Winter 2003 Control Engineering 2-18
FIR model
FIR = Finite Impulse Response
Cut off the trailing part of the pulse response to obtain FIR
FIR filter statex. Shift register
),(
),()1(
uxgy
uxftx
=
=+
h0
h1
h2
h3
u(t)
x1=u(t-1)
y(t)
x2=u(t-2)
x3=u(t-3)
z-1
z-1
z-1
( ) )(*)()()(0
tuhkukthty FIR
N
k
FIR ===
-
8/2/2019 Lecture2 Models
19/40
EE392m - Winter 2003 Control Engineering 2-19
IIR model IIR model:
Filter states: y(t-1), ,y(t-na), u(t-1), , u(t-nb)
==
+=ba n
k
k
n
k
k ktubktyaty01
)()()(
u(t) b0
b1
b2
u(t-1)
u(t-2)
u(t-3)
z
-1
z-1
z-1
-a1
-a2
y(t-1)
y(t-2)
y(t-3)
z
-1
z-1
z-1
y(t)
b3-a3
-
8/2/2019 Lecture2 Models
20/40
EE392m - Winter 2003 Control Engineering 2-20
IIR model Matlab implementation of an IIR model: filter
Transfer function realization: unit delay operatorz-1
( ) ( ) )(...)(...1...
...
...1
...
)(
)()(
)()()(
)(
1
10
)(
1
1
1
1
1
10
1
1
1
10
tuzbzbbtyzazaazaz
bzbzb
zaza
zbzbb
zA
zBzH
tuzHty
zB
N
N
zA
N
N
N
NN
N
NN
N
N
N
N
4444 34444 21444 3444 21
+++=+++
+++
+++=
+++
+++==
=
FIR model is a special case of an IIR with A(z) =1 (orzN)
-
8/2/2019 Lecture2 Models
21/40
EE392m - Winter 2003 Control Engineering 2-21
IIR approximation example Low order IIR approximation of impulse response:
(prony in Matlab Signal Processing Toolbox)
Fewer parameters than a FIR model
Example: sideways heat transfer
pulse response h(t)
approximation with IIR filter a = [a1 a2 ], b=[b0 b1 b2 b3 b4 ]
0 20 40 60 80 1000
0.02
0.04
0.06
TIME
IMPULSE RESPONSE
2
2
1
1
4
4
3
3
2
2
1
10
1)(
++
++++=
zaza
zbzbzbzbbzH
-
8/2/2019 Lecture2 Models
22/40
EE392m - Winter 2003 Control Engineering 2-22
Linear state space model Generic state space model:
LTI state space model
another form of IIR model
physics-based linear system model
Transfer function of an LTI model
defines an IIR representation
Matlab commands for model conversion: help ltimodels
( )[ ]
( ) DBAIzzH
uDBAIzy
+=
+=
1
1
)(
)()()(
)()()1(
tDutCxty
tButAxtx
+=
+=+
),,(
),,()1(
tuxgy
tuxftx
=
=+
-
8/2/2019 Lecture2 Models
23/40
EE392m - Winter 2003 Control Engineering 2-23
Frequency domain description Sinusoids are eigenfunctions of an LTI system:
LTIPlant
tiititieeeez
==
)1(1
Frequency domain analysis
uzHy )(=
==
deueHydeuu
ti
y
iti
43421)(~
)(~)()(~
)(~
u
e tiu
Packet
of
sinusoids)(~
y
e tiPacketof
sinusoids
)( ieH y
-
8/2/2019 Lecture2 Models
24/40
EE392m - Winter 2003 Control Engineering 2-24
Frequency domain description Bode plots:
tii
ti
eeHy
eu
)(==
Example:
)(arg)(
)()(
i
i
eH
eHM
=
=
7.0
1)(
=
zzH
Bode Diagram
Frequency (rad/sec)
Phase(deg)
Magnitude(dB)
-5
0
5
10
15
10-2
10-1
100
-180
-135
-90
-45
0
|H| is often measured
in dB
-
8/2/2019 Lecture2 Models
25/40
EE392m - Winter 2003 Control Engineering 2-25
Black-box model from data Linear black-box model can be determined from the data,
e.g., step response data
This is called model identification
Lecture 8
-
8/2/2019 Lecture2 Models
26/40
EE392m - Winter 2003 Control Engineering 2-26
z-transform, Laplace transform Formal description of the transfer function:
function of complex variablez
analytical outside the circle |z|r
for a stable system r1
k
kzkhzH
== 0 )()(
Laplace transform:
function of complex variable s
analytical in a half plane Re s a for a stable system a1
= dtethsHst)()(
)()()( susHsy =
-
8/2/2019 Lecture2 Models
27/40
EE392m - Winter 2003 Control Engineering 2-27
Stability analysis Transfer function poles tell you everything about stability
Model-based analysis for a simple feedback example:
)(
)(
d
yyKu
uzHy
=
=dd yzLy
KzH
KzHy )(
)(1
)(=
+=
IfH(z) is a rational transfer function describing an IIR
model
ThenL(z) also is a rational transfer function describing anIIR model
-
8/2/2019 Lecture2 Models
28/40
EE392m - Winter 2003 Control Engineering 2-28
Poles and Zeros System not quite so!
Example:
7.0)(
==
zzuzHy
19
171819
0011400016280...4907.0)(z
.z.z.zzuzHy FIR +++++==
Impulse Response
Time (sec)
Am
plitude
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
Impulse Response
Time (sec)
Amplitude
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
FIR model - truncated IIR
-
8/2/2019 Lecture2 Models
29/40
EE392m - Winter 2003 Control Engineering 2-29
IIR/FIR example - contd Feedback control:
Closed loop:
)()(7.0
)(
dd yyyyKuz
zuzHy
==
==
Impulse Response
Time (sec )
Amplitude
0 5 10 15 20 250
0.2
0.4
0.6
0.8
uzLuzH
zHy )(
)(1
)(=
+=
uzLuzH
zH
y FIRFIR
FIR
)()(1
)(
=+=
-
8/2/2019 Lecture2 Models
30/40
EE392m - Winter 2003 Control Engineering 2-30
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
IIR/FIR example - contd
Poles and zeros Blue: Loop
with IIRmodel poles x
and zeros o
Red: Loopwith FIRmodel poles x
and zeros o
-
8/2/2019 Lecture2 Models
31/40
EE392m - Winter 2003 Control Engineering 2-31
LTI models - summary Linear system can be described by impulse response
Linear system can be described by frequency response =Fourier transform of the impulse response
FIR, IIR, State-space models can be used to obtain close
approximations of a linear system
A pattern of poles and zeros can be very different for asmall change in approximation error.
Approximation error model uncertainty
-
8/2/2019 Lecture2 Models
32/40
EE392m - Winter 2003 Control Engineering 2-32
Nonlinear map linearization Nonlinear - detailed
model
Linear - conceptualdesign model
Static map, gain
range, sector
linearity
Differentiation,
secant method
)()( 0uuufufy =
-
8/2/2019 Lecture2 Models
33/40
EE392m - Winter 2003 Control Engineering 2-33
Nonlinear state space model
linearization
Linearize the r.h.s. map
Secant method
Or capture a response to small step and build an
impulse response model
BvAqq
uu
u
fxx
x
fuxfx
vq
+=
+
=
&
4342143421& )()(),( 00
{]0...1...0[
)(
# j
j
j
j
j
s
ssxf
xf
=
+=
-
8/2/2019 Lecture2 Models
34/40
EE392m - Winter 2003 Control Engineering 2-34
Sampled time vs. continuous time Continuous time analysis (Digital implementation of
continuous time controller)
Tustins method = trapezoidal rule of integration for
Matched Zero Pole: map each zero and a pole in accordance with
Sampled time analysis (Sampling of continuous signalsand system)
+
==
1
1
1
12)()(
z
z
TsHzHsH s
ssH
1)( =
sTes =
-
8/2/2019 Lecture2 Models
35/40
EE392m - Winter 2003 Control Engineering 2-35
Sampled and continuous time Sampled and continuous time together
Continuous time physical system + digital controller
ZOH = Zero Order Hold
Sensors
Control
computing
ActuatorsPhysicalsystem
D/A, ZOHA/D, Sample
-
8/2/2019 Lecture2 Models
36/40
EE392m - Winter 2003 Control Engineering 2-36
Signal sampling, aliasing
Nyquist frequency:
N= S; S= 2/T
Frequency folding: kS map to the same frequency
Sampling Theorem: sampling is OK if there are no frequency
components above
N
Practical approach to anti-aliasing: low pass filter (LPF)
Sampledcontinuous: impostoring
Digitalcomputing
D/A, ZOHA/D, Sample
Low
Pass
Filter
LowPass
Filter
-
8/2/2019 Lecture2 Models
37/40
EE392m - Winter 2003 Control Engineering 2-37
Simulation ODE solution
dynamical model:
Euler integration method: Runge-Kutta: ode45 in Matlab
Can do simple problems by integrating ODEs
Issues: mixture of continuous and sampled time
hybrid logic (conditions)
state machines
stiff systems, algebraic loops systems integrated out of many subsystems
large projects, many people contribute different subsystems
),( txfx =&
( )ttxfdtxdtx ),()()( +=+
-
8/2/2019 Lecture2 Models
38/40
EE392m - Winter 2003 Control Engineering 2-38
Simulation environment
Block libraries
Subsystem blocks
developed independently
Engineered for developing
large simulation models
Supports code generation
Simulink by Mathworks
Matlab functions and analysis
Stateflow state machines
Ptolemeus -
UC Berkeley
-
8/2/2019 Lecture2 Models
39/40
EE392m - Winter 2003 Control Engineering 2-39
Model block development Look up around for available conceptual models
Physics - conceptual modeling
Science (analysis, simple conceptual abstraction) vs.
engineering (design, detailed models - out of simple blocks)
-
8/2/2019 Lecture2 Models
40/40
EE392m - Winter 2003 Control Engineering 2-40
Modeling uncertainty Modeling uncertainty:
unknown signals
model errors
Controllers work with real systems:
Signal processing: data algorithm data
Control: algorithms in a feedback loop witha realsystem
BIG question: Why controller designed for a model would
everwork with a real system?
Robustness, gain and phase margins,
Control design model, vs. control analysis model Monte-Carlo analysis - a fancy name for a desperate approach