
Lecture on fitting - Academic Computer Centeracademic.pgcc.edu/~sjohnson/fittingtopic.pdf · –...
13
Fitting to a set of data Lecture on fitting
Transcript of Lecture on fitting - Academic Computer Centeracademic.pgcc.edu/~sjohnson/fittingtopic.pdf · –...

Fitting to a set of data
Lecture on fitting

Linear regression
● Linear regression
– Residual is the amount difference between a real data point and a modeled data point
– Fitting a polynomial to data
● Could use minimization of the sum of residuals
– Cancellation errors– Could bisect a set of points rather than fitting through them
● Could use minimization of the sum of the absolute value of the residuals
– Too much influence to outliers● Could use minimization of the sum of the square of the residuals
– Works well– Solves problems mention in the other two methods

Least square
● Least square form, take derivative
S=∑i=1
n
yi ,measured−yi,model2
S=∑i=1
n
yi−ao−a1xi2
∂S∂a0
=−2∑ yi−a0−a1xi=0
∂S∂a1
=−2∑ yi−a0−a1x1xi=0
ymodel=mxib=a0a1xi
slope=a1=n∑ xiyi−∑ xi∑ yi
n∑ xi2−∑xi
2
ao=⟨y⟩−a1⟨x⟩
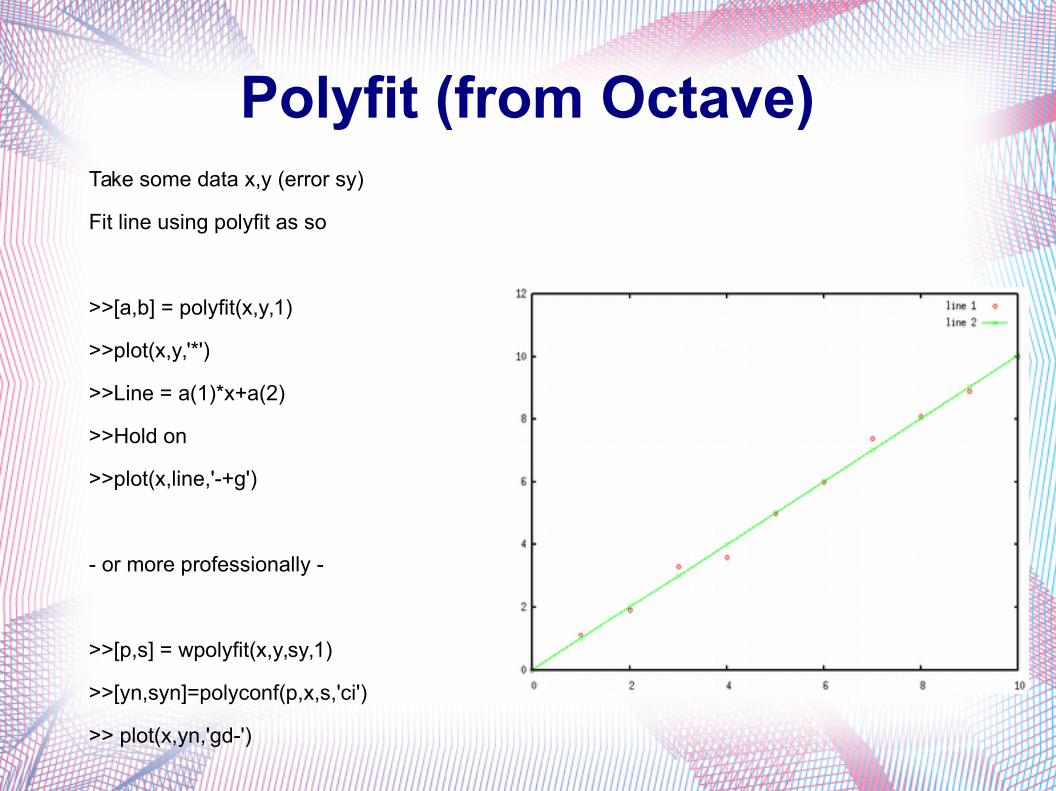
Polyfit (from Octave)Take some data x,y (error sy)
Fit line using polyfit as so
>>[a,b] = polyfit(x,y,1)
>>plot(x,y,'*')
>>Line = a(1)*x+a(2)
>>Hold on
>>plot(x,line,'-+g')
- or more professionally -
>>[p,s] = wpolyfit(x,y,sy,1)
>>[yn,syn]=polyconf(p,x,s,'ci')
>> plot(x,yn,'gd-')

Nonlinear regression
● Cannot solve like the least square method– Use Gauss-Newton optimization method
● Think Levenberg-Marquardt which is an optimization method of this nature
● Think least square/minimization/idea/concept

Interpolation
>>slope = (y(5)-y(4))/(x(5)-x(4))
>>intercept=y(4)-slope*x(4)
>>newline=slope*x+intercept
>>plot(x,y,'*')
>> hold on
>>plot(x(4:5),newline(4:5))
>>%% Clearly I can now get a point
>>%% in the middle
>>point=slope*3.4+intercept
This is a simple way of interpolating clearly it could be argued that a fitted line would be more appropriate than a slope-intercept form.
Splines are often used
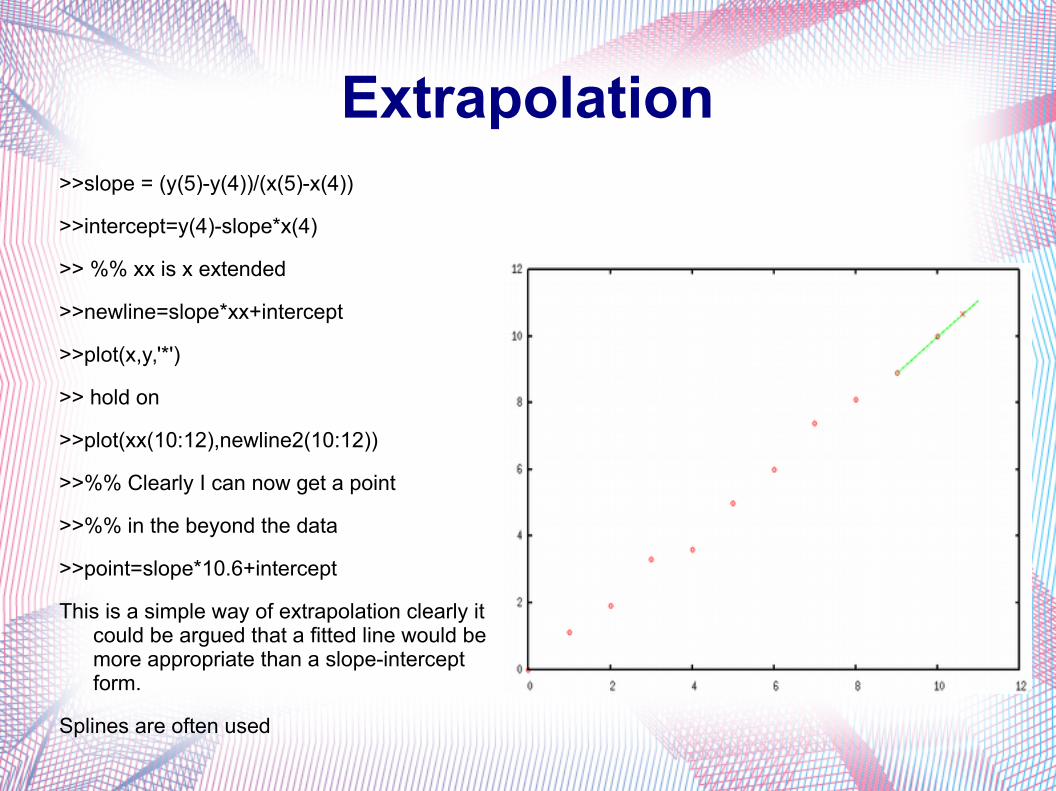
Extrapolation>>slope = (y(5)-y(4))/(x(5)-x(4))
>>intercept=y(4)-slope*x(4)
>> %% xx is x extended
>>newline=slope*xx+intercept
>>plot(x,y,'*')
>> hold on
>>plot(xx(10:12),newline2(10:12))
>>%% Clearly I can now get a point
>>%% in the beyond the data
>>point=slope*10.6+intercept
This is a simple way of extrapolation clearly it could be argued that a fitted line would be more appropriate than a slope-intercept form.
Splines are often used

Spline
● Fits splines (curves) through the data
– Fits data (usually noisy) through “knots” ● Good method
● Requires picking knot locations
– Fits through knots using best method
– Use a “spline” like in boats to fit through the points (or knots)
– Different curves can be generated depending on the type of spline used
– B-spline is popular● B in B-spline stands for “basis” functions
● Curves of the B-spline have orders which progressively look like a line to a “triangular hat” to an actual curve
● Other splines include the cubic, Bezier, etc.
– T-spline is a terminated non-recursive rational B-spline● This is why you see both t-spline and b-spline calculated in the same
function

SplineB-spline basic functions (image from Berkeley)
Digital Filters
● In essence an electronic filter that is represented digitally
– Control systems (or system dynamics)● Convert a signal to a digital signal● Change the signal using a transfer function over the
digital signal● Implemented using a difference equation
– Like a Fast Fourier Transform (FFT)
– Used for smoothing
– Used for fitting
– While advantageous over electronic filtering due to the inherent drifts and noise, it can be very complex and lead to removal of real signal

Digital Filters
● There are a number of types of digital filters thought they all revolve around some form of transfer function– IIR filters
● Infinite impulse response (delta functions) filters
– Dirac delta functions– Mathematically ideal– Need to implement carefully around “x=0”
point as there is no clear definition of what that is...can do it though
– Typically defined carefully with a difference equation
∫−∞
∞
f x x−adx= f a
Digital Filters
● There are a number of types of digital filters thought they all revolve around some form of transfer function– FIR filters
● Finite impulse response filters– Kronecker delta function– Discrete analogy to Dirac delta function
● Implemented using difference equation● Window function filter is most common
δi j=1wheni= jδi j=0when i≠ j
∑i=−∞
∞
f iδi j= f j

Control Systems - filters
● Control systems (system dynamics)
– Difference equation (possible derived from a transform) equates the output to the input by a set of coefficients that “filter” the input
– Iterative process
– Where coefficients represent feed forward (a coefficients) and feed back (b coefficients) coefficients (recall EGR 1010 discussion of this)
– Equation below is for IIR, remove feedback and you have FIR
yn=α (∑i=0
i=l
ai x i−n−∑j=1
j=m
b j y n− j)


















