Lecture 12: Delaunay Triangulations - Department of Information
68
Introduction Triangulations Delaunay Triangulations Applications Delaunay Triangulations Computational Geometry Lecture 12: Delaunay Triangulations Computational Geometry Lecture 12: Delaunay Triangulations 1
Transcript of Lecture 12: Delaunay Triangulations - Department of Information

IntroductionTriangulations
Delaunay TriangulationsApplications
Delaunay Triangulations
Computational Geometry
Lecture 12: Delaunay Triangulations
Computational Geometry Lecture 12: Delaunay Triangulations1

IntroductionTriangulations
Delaunay TriangulationsApplications
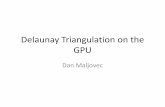
Motivation: Terrains by interpolation
To build a model of the terrainsurface, we can start with a numberof sample points where we know theheight.
Computational Geometry Lecture 12: Delaunay Triangulations2

IntroductionTriangulations
Delaunay TriangulationsApplications
Motivation: Terrains
How do we interpolate the height atother points?
Nearest neighbor interpolation
Piecewise linear interpolation bya triangulation
Moving windows interpolation
Natural neighbor interpolation
. . .
?233
246
211
258
251
235
240
Computational Geometry Lecture 12: Delaunay Triangulations3

IntroductionTriangulations
Delaunay TriangulationsApplications
Triangulation
Let P = {p1, . . . ,pn} be a point set.A triangulation of P is a maximalplanar subdivision with vertex set P.
Complexity:
2n−2− k triangles
3n−3− k edges
where k is the number of points in Pon the convex hull of P
Computational Geometry Lecture 12: Delaunay Triangulations4

IntroductionTriangulations
Delaunay TriangulationsApplications
Triangulation
But which triangulation?
Computational Geometry Lecture 12: Delaunay Triangulations5

IntroductionTriangulations
Delaunay TriangulationsApplications
Triangulation
But which triangulation?
For interpolation, it is good if triangles are not long andskinny. We will try to use large angles in our triangulation.
Computational Geometry Lecture 12: Delaunay Triangulations6

IntroductionTriangulations
Delaunay TriangulationsApplications
Angle Vector of a Triangulation
Let T be a triangulation of P with m triangles. Its anglevector is A(T) = (α1, . . . ,α3m) where α1, . . . ,α3m are theangles of T sorted by increasing value.
Let T′ be another triangulation ofP. We define A(T)> A(T′) if A(T)is lexicographically larger thanA(T′)
T is angle optimal if A(T)≥ A(T′)for all triangulations T′ of P
α1
α2 α3
α4
α5
α6
Computational Geometry Lecture 12: Delaunay Triangulations7

IntroductionTriangulations
Delaunay TriangulationsApplications
Edge Flipping
edge flip
pi α4
α1
α3
α5
α2
α6
pj
pk
pl
α′1
α′4
α′3
α′5
α′2
α′6
pi
pj
pk
pl
Change in angle vector:α1, . . . ,α6 are replaced by α ′1, . . . ,α
′6
The edge e = pipj is illegal if min1≤i≤6 αi < min1≤i≤6 α ′iFlipping an illegal edge increases the angle vector
Computational Geometry Lecture 12: Delaunay Triangulations8

IntroductionTriangulations
Delaunay TriangulationsApplications
Characterisation of Illegal Edges
How do we determine if an edge is illegal?
Lemma: The edge pipj is illegal ifand only if pl lies in the interior ofthe circle C. pi
pj
pk
pl
illegal
Computational Geometry Lecture 12: Delaunay Triangulations9

IntroductionTriangulations
Delaunay TriangulationsApplications
Thales Theorem
Theorem: Let C be a circle, ` a lineintersecting C in points a and b, andp,q,r,s points lying on the same sideof `. Suppose that p,q lie on C, r liesinside C, and s lies outside C. Then
]arb > ]apb = ]aqb > ]asb,
where ]abc denotes the smallerangle defined by three points a,b,c.
` C
p
q
r
s
a
b
Computational Geometry Lecture 12: Delaunay Triangulations10

IntroductionTriangulations
Delaunay TriangulationsApplications
Legal Triangulations
A legal triangulation is a triangulation that does not containany illegal edge.
Algorithm LegalTriangulation(T)Input. A triangulation T of a point set P.Output. A legal triangulation of P.1. while T contains an illegal edge pipj
2. do (∗ Flip pipj ∗)3. Let pipjpk and pipjpl be the two triangles adjacent
to pipj.4. Remove pipj from T, and add pkpl instead.5. return T
Question: Why does this algorithm terminate?
Computational Geometry Lecture 12: Delaunay Triangulations11

IntroductionTriangulations
Delaunay TriangulationsApplications
Properties
Voronoi Diagram and Delaunay Graph
Let P be a set of n points in theplane
The Voronoi diagram Vor(P) isthe subdivision of the plane intoVoronoi cells V(p) for all p ∈ P
Let G be the dual graph ofVor(P)
The Delaunay graph DG(P) isthe straight line embedding of G
Computational Geometry Lecture 12: Delaunay Triangulations12

IntroductionTriangulations
Delaunay TriangulationsApplications
Properties
Voronoi Diagram and Delaunay Graph
Let P be a set of n points in theplane
The Voronoi diagram Vor(P) isthe subdivision of the plane intoVoronoi cells V(p) for all p ∈ P
Let G be the dual graph ofVor(P)
The Delaunay graph DG(P) isthe straight line embedding of G
Computational Geometry Lecture 12: Delaunay Triangulations13

IntroductionTriangulations
Delaunay TriangulationsApplications
Properties
Voronoi Diagram and Delaunay Graph
Let P be a set of n points in theplane
The Voronoi diagram Vor(P) isthe subdivision of the plane intoVoronoi cells V(p) for all p ∈ P
Let G be the dual graph ofVor(P)
The Delaunay graph DG(P) isthe straight line embedding of G
Computational Geometry Lecture 12: Delaunay Triangulations14

IntroductionTriangulations
Delaunay TriangulationsApplications
Properties
Voronoi Diagram and Delaunay Graph
Let P be a set of n points in theplane
The Voronoi diagram Vor(P) isthe subdivision of the plane intoVoronoi cells V(p) for all p ∈ P
Let G be the dual graph ofVor(P)
The Delaunay graph DG(P) isthe straight line embedding of G
Computational Geometry Lecture 12: Delaunay Triangulations15

IntroductionTriangulations
Delaunay TriangulationsApplications
Properties
Planarity of the Delaunay Graph
Theorem: The Delaunay graph of a planar point set is a planegraph.
Cij
pi
pj
contained in V(pi)
contained in V(pj)
Computational Geometry Lecture 12: Delaunay Triangulations16

IntroductionTriangulations
Delaunay TriangulationsApplications
Properties
Delaunay Triangulation
If the point set P is in general position then the Delaunay graphis a triangulation.
vf
Computational Geometry Lecture 12: Delaunay Triangulations17

IntroductionTriangulations
Delaunay TriangulationsApplications
Properties
Empty Circle Property
Theorem: Let P be a set of points in the plane, and let T bea triangulation of P. Then T is a Delaunay triangulation of Pif and only if the circumcircle of any triangle of T does notcontain a point of P in its interior.
Computational Geometry Lecture 12: Delaunay Triangulations18

IntroductionTriangulations
Delaunay TriangulationsApplications
Properties
Delaunay Triangulations and Legal Triangulations
Theorem: Let P be a set of points in the plane. A triangulationT of P is legal if and only if T is a Delaunay triangulation.
pi
pjpk
pl
C(pipjpk)
pm C(pipjpm)
e
Computational Geometry Lecture 12: Delaunay Triangulations19

IntroductionTriangulations
Delaunay TriangulationsApplications
Properties
Angle Optimality and Delaunay Triangulations
Theorem: Let P be a set of points in the plane.Any angle-optimal triangulation of P is a Delaunaytriangulation of P. Furthermore, any Delaunay triangulation ofP maximizes the minimum angle over all triangulations of P.
Computational Geometry Lecture 12: Delaunay Triangulations20

IntroductionTriangulations
Delaunay TriangulationsApplications
Properties
Computing Delaunay Triangulations
There are several ways to compute the Delaunay triangulation:
By iterative flipping from any triangulation
By plane sweep
By randomized incremental construction
By conversion from the Voronoi diagram
The last three run in O(n logn) time [expected] for n points inthe plane
Computational Geometry Lecture 12: Delaunay Triangulations21

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Using Delaunay Triangulations
Delaunay triangulations help in constructing various things:
Euclidean Minimum Spanning Trees
Approximations to the EuclideanTraveling Salesperson Problem
α-Hulls
Computational Geometry Lecture 12: Delaunay Triangulations22

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Euclidean Minimum Spanning Tree
For a set P of n points in the plane, theEuclidean Minimum Spanning Tree isthe graph with minimum summed edgelength that connects all points in P andhas only the points of P as vertices
Computational Geometry Lecture 12: Delaunay Triangulations23

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Euclidean Minimum Spanning Tree
For a set P of n points in the plane, theEuclidean Minimum Spanning Tree isthe graph with minimum summed edgelength that connects all points in P andhas only the points of P as vertices
Computational Geometry Lecture 12: Delaunay Triangulations24

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Euclidean Minimum Spanning Tree
Lemma: The Euclidean Minimum Spanning Tree doesnot have cycles (it really is a tree)
Proof: Suppose G is the shortest connected graph andit has a cycle. Removing one edge from the cycle makesa new graph G′ that is still connected but which isshorter. Contradiction
Computational Geometry Lecture 12: Delaunay Triangulations25

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Euclidean Minimum Spanning Tree
Lemma: Every edge of theEuclidean Minimum Spanning Treeis an edge in the Delaunay graph
Proof: Suppose T is an EMST withan edge e = pq that is not Delaunay
Consider the circle C that has e asits diameter. Since e is not Delaunay,C must contain another point r in P(different from p and q)
p
q
r
Computational Geometry Lecture 12: Delaunay Triangulations26

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Euclidean Minimum Spanning Tree
Lemma: Every edge of theEuclidean Minimum Spanning Treeis an edge in the Delaunay graph
Proof: (continued)
Either the path in T from r to ppasses through q, or vice versa.The cases are symmetric, so we canassume the former case
p
q
r
Computational Geometry Lecture 12: Delaunay Triangulations27

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Euclidean Minimum Spanning Tree
Lemma: Every edge of theEuclidean Minimum Spanning Treeis an edge in the Delaunay graph
Proof: (continued)
Then removing e and inserting prinstead will give a connected graphagain (in fact, a tree)
Since q was the furthest point from pinside C, r is closer to q, so T wasnot a minimum spanning tree.Contradiction
p
q
r
Computational Geometry Lecture 12: Delaunay Triangulations28

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Euclidean Minimum Spanning Tree
How can we compute a Euclidean Minimum Spanning Treeefficiently?
From your Data Structures course: A data structure exists thatmaintains disjoint sets and allows the following two operations:
Union: Takes two sets and makes one new set that is theunion (destroys the two given sets)
Find: Takes one element and returns the name of the setthat contains it
If there are n elements in total, then all Unions together takeO(n logn) time and each Find operation takes O(1) time
Computational Geometry Lecture 12: Delaunay Triangulations29

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Euclidean Minimum Spanning Tree
Let P be a set of n points in the plane for which we want tocompute the EMST
1 Make a Union-Find structure where every point of P is ina separate set
2 Construct the Delaunay triangulation DT of P3 Take all edges of DT and sort them by length4 For all edges e from short to long:
Let the endpoints of e be p and qIf Find(p) 6= Find(q), then put e in the EMST, andUnion(Find(p),Find(q))
Computational Geometry Lecture 12: Delaunay Triangulations30

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Euclidean Minimum Spanning Tree
Step 1 takes linear time, the other three steps take O(n logn)time
Theorem: Let P be a set of n points in the plane.The Euclidean Minimum Spanning Tree of P can becomputed in O(n logn) time
Computational Geometry Lecture 12: Delaunay Triangulations31

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
The traveling salesperson problem
Given a set P of n points in the plane, the Euclidean TravelingSalesperson Problem is to compute a tour (cycle) that visitsall points of P and has minimum length
A tour is an order on the points of P (more precisely: a cyclicorder). A set of n points has (n−1)! different tours
Computational Geometry Lecture 12: Delaunay Triangulations32

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
The traveling salesperson problem
We can determine the length of each tour in O(n) time: abrute-force algorithm to solve the Euclidean TravelingSalesperson Problem (ETSP) takes O(n) ·O((n−1)!) = O(n!)time
How bad is n!?
Computational Geometry Lecture 12: Delaunay Triangulations33

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Efficiency
n n2 2n n!6 36 64 7207 49 128 50408 64 256 40K9 81 512 360K
10 100 1024 3.5M15 225 32K 2,000,000T20 400 1M30 900 1G
Clever algorithms can solve instances in O(n2 ·2n) time
Computational Geometry Lecture 12: Delaunay Triangulations34

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
If an algorithm A solves an optimization problem alwayswithin a factor k of the optimum, then A is called ank-approximation algorithm
If an instance I of ETSP has an optimal solution of length L,then a k-approximation algorithm will find a tour of length≤ k ·L
Computational Geometry Lecture 12: Delaunay Triangulations35

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
Consider the diameter problem of a set of npoints. We can compute the real value ofthe diameter in O(n logn) time
Suppose we take any point p, determine itsfurthest point q, and return their distance.This takes only O(n) time
Question: Is this an approximationalgorithm?
Computational Geometry Lecture 12: Delaunay Triangulations36

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
Consider the diameter problem of a set of npoints. We can compute the real value ofthe diameter in O(n logn) time
Suppose we take any point p, determine itsfurthest point q, and return their distance.This takes only O(n) time
Question: Is this an approximationalgorithm?
p
q
Computational Geometry Lecture 12: Delaunay Triangulations37

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
Suppose we determine the point withminimum x-coordinate p and the point withmaximum x-coordinate q, and return theirdistance. This takes only O(n) time
Question: Is this an approximation algorithm?
Computational Geometry Lecture 12: Delaunay Triangulations38

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
Suppose we determine the point withminimum x-coordinate p and the point withmaximum x-coordinate q, and return theirdistance. This takes only O(n) time
Question: Is this an approximation algorithm?
Computational Geometry Lecture 12: Delaunay Triangulations39

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
Suppose we determine the point withminimum x-coordinate p and the point withmaximum x-coordinate q.Then we determine the point with minimumy-coordinate r and the point with maximumy-coordinate s.We return max(d(p,q), d(r,s)).This takes only O(n) time
Question: Is this an approximation algorithm?
Computational Geometry Lecture 12: Delaunay Triangulations40

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
Suppose we determine the point withminimum x-coordinate p and the point withmaximum x-coordinate q.Then we determine the point with minimumy-coordinate r and the point with maximumy-coordinate s.We return max(d(p,q), d(r,s)).This takes only O(n) time
Question: Is this an approximation algorithm?
Computational Geometry Lecture 12: Delaunay Triangulations41

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
Back to Euclidean TravelingSalesperson:
We will use the EMST toapproximate the ETSP
start at any vertex
Computational Geometry Lecture 12: Delaunay Triangulations42

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
Back to Euclidean TravelingSalesperson:
We will use the EMST toapproximate the ETSP
follow an edge on one side
Computational Geometry Lecture 12: Delaunay Triangulations43

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
Back to Euclidean TravelingSalesperson:
We will use the EMST toapproximate the ETSP
. . . to get to another vertex
Computational Geometry Lecture 12: Delaunay Triangulations44

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
Back to Euclidean TravelingSalesperson:
We will use the EMST toapproximate the ETSP
proceed this way
Computational Geometry Lecture 12: Delaunay Triangulations45

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
Back to Euclidean TravelingSalesperson:
We will use the EMST toapproximate the ETSP
proceed this way
Computational Geometry Lecture 12: Delaunay Triangulations46

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
Back to Euclidean TravelingSalesperson:
We will use the EMST toapproximate the ETSP
proceed this way
Computational Geometry Lecture 12: Delaunay Triangulations47

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
Back to Euclidean TravelingSalesperson:
We will use the EMST toapproximate the ETSP
skipping visited vertices
Computational Geometry Lecture 12: Delaunay Triangulations48

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
Back to Euclidean TravelingSalesperson:
We will use the EMST toapproximate the ETSP
skipping visited vertices
Computational Geometry Lecture 12: Delaunay Triangulations49

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
Back to Euclidean TravelingSalesperson:
We will use the EMST toapproximate the ETSP
skipping visited vertices
Computational Geometry Lecture 12: Delaunay Triangulations50

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
Back to Euclidean TravelingSalesperson:
We will use the EMST toapproximate the ETSP
skipping visited vertices
Computational Geometry Lecture 12: Delaunay Triangulations51

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
Back to Euclidean TravelingSalesperson:
We will use the EMST toapproximate the ETSP
skipping visited vertices
Computational Geometry Lecture 12: Delaunay Triangulations52

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
Back to Euclidean TravelingSalesperson:
We will use the EMST toapproximate the ETSP
skipping visited vertices
Computational Geometry Lecture 12: Delaunay Triangulations53

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
Back to Euclidean TravelingSalesperson:
We will use the EMST toapproximate the ETSP
skipping visited vertices
Computational Geometry Lecture 12: Delaunay Triangulations54

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
Back to Euclidean TravelingSalesperson:
We will use the EMST toapproximate the ETSP
skipping visited vertices
Computational Geometry Lecture 12: Delaunay Triangulations55

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
Back to Euclidean TravelingSalesperson:
We will use the EMST toapproximate the ETSP
and close the tour
Computational Geometry Lecture 12: Delaunay Triangulations56

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
Back to Euclidean TravelingSalesperson:
We will use the EMST toapproximate the ETSP
and close the tour
Computational Geometry Lecture 12: Delaunay Triangulations57

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
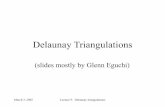
Why is this tour an approximation?
The walk visits every edge twice,so it has length 2 · |EMST|The tour skips vertices, whichmeans the tour has length≤ 2 · |EMST|The optimal ETSP-tour is aspanning tree if you remove anyedge!!!So |EMST|< |ETSP|
optimal ETSP-tour
Computational Geometry Lecture 12: Delaunay Triangulations58

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Approximation algorithms
Theorem: Given a set of n points in the plane, a tour visitingall points whose length is at most twice the minimum possiblecan be computed in O(n logn) time
In other words: an O(n logn) time, 2-approximation for ETSPexists
Computational Geometry Lecture 12: Delaunay Triangulations59

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
α-Shapes
Suppose that you have a set ofpoints in the plane that weresampled from a shape
We would like to reconstruct theshape
Computational Geometry Lecture 12: Delaunay Triangulations60

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
α-Shapes
Suppose that you have a set ofpoints in the plane that weresampled from a shape
We would like to reconstruct theshape
Computational Geometry Lecture 12: Delaunay Triangulations61

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
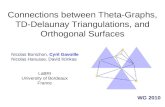
α-Shapes
An α-disk is a disk of radius α
The α-shape of a point set P is thegraph with the points of P as thevertices, and two vertices p,q areconnected by an edge if there existsan α-disk with p and q on theboundary but no other points if Pinside or on the boundary
Computational Geometry Lecture 12: Delaunay Triangulations62

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
α-Shapes
An α-disk is a disk of radius α
The α-shape of a point set P is thegraph with the points of P as thevertices, and two vertices p,q areconnected by an edge if there existsan α-disk with p and q on theboundary but no other points if Pinside or on the boundary
Computational Geometry Lecture 12: Delaunay Triangulations63

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
α-Shapes
An α-disk is a disk of radius α
The α-shape of a point set P is thegraph with the points of P as thevertices, and two vertices p,q areconnected by an edge if there existsan α-disk with p and q on theboundary but no other points if Pinside or on the boundary
Computational Geometry Lecture 12: Delaunay Triangulations64

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
α-Shapes
An α-disk is a disk of radius α
The α-shape of a point set P is thegraph with the points of P as thevertices, and two vertices p,q areconnected by an edge if there existsan α-disk with p and q on theboundary but no other points if Pinside or on the boundary
Computational Geometry Lecture 12: Delaunay Triangulations65

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
α-Shapes
Because of the empty disk propertyof Delaunay triangulations (eachDelaunay edge has an empty diskthrough its endpoints), everyα-shape edge is also a Delaunayedge
Hence: there are O(n) α-shapeedges, and they cannot properlyintersect
Computational Geometry Lecture 12: Delaunay Triangulations66

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
α-Shapes
Given the Delaunay triangulation, wecan determine for any edge all sizesof empty disks through the endpointsin O(1) time
So the α-shape can be computed inO(n logn) time
Computational Geometry Lecture 12: Delaunay Triangulations67

IntroductionTriangulations
Delaunay TriangulationsApplications
Minimum spanning treesTraveling SalespersonShape Approximation
Conclusions
The Delaunay triangulation is a versatile structure that can becomputed in O(n logn) time for a set of n points in the plane
Approximation algorithms are like heuristics, but they comewith a guarantee on the quality of the approximation. Theyare useful when an optimal solution is too time-consuming tocompute
Computational Geometry Lecture 12: Delaunay Triangulations68