Lecture 1
17
1 Introduction to Vehicle Crashworthiness Lecture -1 Lecture 1 CE 264 Non-linear Finite Element Modeling and Simulation Contact Information Pradeep Mohan Office Phone: (703)726-8538 Office Phone: (703)726-8538 Office: Research 2, 302 E Email: [email protected] Office Hours: 2:00 to 4:00 PM on Tuesdays and by appointment Web: http://crash.ncac.gwu.edu/pradeep/ CE 264, Lecture 1 Slide #2 What is Non-Linear FEM and why study it? FEM is a numerical analysis technique for obtaining approximate solutions to a wide variety of engineering problems for which an analytical solution does not Objective problems for which an analytical solution does not exist Non-linearities Material • Stress-strain behavior Geometry CE 264, Lecture 1 Slide #3 • Change in geometry have a significant effect on the load deformation behavior Safety Standards CE 264 Non-linear Finite Element Modeling and Simulation
-
Upload
nagarjunsingh -
Category
Documents
-
view
45 -
download
1
Transcript of Lecture 1

1
Introduction to Vehicle Crashworthiness
Lecture -1Lecture 1
CE 264Non-linear Finite Element Modeling and Simulation
Contact Information
Pradeep MohanOffice Phone: (703)726-8538Office Phone: (703)726-8538Office: Research 2, 302 EEmail: [email protected] Hours: 2:00 to 4:00 PM on
Tuesdays and by appointmentWeb: http://crash.ncac.gwu.edu/pradeep/
CE 264, Lecture 1 Slide #2
What is Non-Linear FEM and why study it? FEM is a numerical analysis technique for obtaining
approximate solutions to a wide variety of engineering problems for which an analytical solution does not
Objective
problems for which an analytical solution does not exist
Non-linearities Material
• Stress-strain behavior Geometry
CE 264, Lecture 1 Slide #3
• Change in geometry have a significant effect on the load deformation behavior
Safety Standards
CE 264Non-linear Finite Element Modeling and Simulation

2
Federal Motor Vehicle Safety Standards (Part 571)
“Active Safety / Crash Avoidance” - 100 Series Pre-Crash Phase
• Crash Avoidance & security Braking (ABS), electronic stability control (ESC), lighting and signalling
“Passive Safety / Crashworthiness” - 200 Series Crash Phase
• Minimize risk of injury to occupants, combines the reciprocal aims of absorbing impact and ensuring a survival space
208 – Occupant Crash Protection 214 – Side Impact Protection 216 – Roof Crush Resistance
CE 264, Lecture 1 Slide #5
“Fire-related” - 300 Series Post-Crash Phase
• Interior Trim Flammability and fuel system integrity 301 – Fuel System Integrity
Frontal Impact – Regulatory Requirements
Federal Motor Vehicle Safety Standard (FMVSS) 208 – old
30 mph ( 48 kph) into a fixed barrierbarrier
50th percentile Hybrid III dummy in front driver and passenger seats
Uses dummy injury measures for regulation
• Chest G’s <= 60• HIC <= 1000• Femur Loads <= 10 KN
Protection must be automatic
CE 264, Lecture 1 Slide #6
Protection must be automatic
Purpose of this test is to evaluate the performance of the occupant restraint systems (seat belts, airbags, etc.)
FMVSS 208 – New Regulation
The first stage phase-in ,9/1/03-8/31/06, requires vehicles to be certified as passing: Unbelted test requirements for both the 5th percentile
d lt f l d 50th til d lt l d i iadult female and 50th percentile adult male dummies in a 40 km/h (25 mph) rigid barrier crash
Belted test requirements for the same two dummies in a rigid barrier crash with a maximum test speed of 48km/h (30 mph)
Include technologies that will minimize risk for young
CE 264, Lecture 1 Slide #7
children and small adults • De-powered Airbags• Occupant sensing system
FMVSS 208 – New Regulation
The second stage phase-in, 9/1/ 2007-8/31/2010, requires vehicles to be certified as passing: Maximum test speed for the belted rigid barrier test
will increase from 48 km/h (30 mph) to 56km/h (35will increase from 48 km/h (30 mph) to 56km/h (35 mph) in tests with the 50th percentile adult male dummy only
CE 264, Lecture 1 Slide #8

3
FMVSS 208 – New Regulation
Test requirements to improve occupant protectionfor different size occupants, belted and unbelted
50th precentileadult male dummies
5th percentileadult female dummy
Rigid Barrier Test Rigid Barrier Test 40% offset frontaldeformable barrier test
UnbeltedDriver andP
BeltedDriver andP
UnbeltedDriver andP
BeltedDriver andP
BeltedDriver andP
CE 264, Lecture 1 Slide #9
Passenger20-25 mph
Passenger0-35 mph
Passenger20-25 mph
Passenger0-30 mph
Passenger0-25 mph
Perpendicularand up to 30
degreesOblique
Perpendicular Perpendicular Perpendicular Left SideImpact
FMVSS 208 – New Regulation
Test requirements to minimize the risk to infants,children, and other occupants from injuries and
deaths caused by airbags
Rear facing childsafety with 1 year
old dummy
3-year-oldand 6-year-oldchild dummies
Suppression(presence)
Suppression(presence)
Suppression(out of position)
5th percentile adultfemale dummy(driver position)
CE 264, Lecture 1 Slide #10
Low riskdeployment
Low riskdeployment
Suppression(out of position)
Low riskdeployment
FMVSS 208 – Advanced occupant protection
FMVSS 208 drove design changes to adjust the deployment of the front airbags to enhance protection for front-seat occupants using crash severity sensors crash severity sensors seat belt usage sensors dual-stage driver and front-passenger airbags driver's seat position sensor front outboard safety belt pre-tensioners etc.,
CE 264, Lecture 1 Slide #11
Frontal Impact – Consumer Tests New Car Assessment Program, NCAP
• 35 mph (56 kph) into a fixed rigid barrier
• 50th percentile Hybrid III dummy in front driver and passenger seats
= 10% or less chance of serious injury
= 11% to 20% chance of serious injury
= 21% to 35% chance of serious injury p g
• Star rating used to assess probability of serious injury
• Head and chest injury data are combined into a single rating and reflected by the number of stars
j y= 36% to 45% chance
of serious injury = 46% or greater
chance of serious injury
CE 264, Lecture 1 Slide #12

4
Frontal Impact - Consumer Tests
Insurance Institute for Highway Safety (IIHS)
40% offset 40 mph (64 kph) into 40% offset 40 mph (64 kph) into a deformable barrier
50th percentile male Hybrid III dummy in front driver seat
Good, Acceptable, Marginal and Poor ratings to assess vehicle’s overall crashworthiness
Rating based on:
CE 264, Lecture 1 Slide #13
• Dummy Injury measures• Structural performance• Restraints/dummy
kinematics
Evaluates the structural performance of the vehicle
Federal Motor Vehicle Safety Standard (FMVSS) 214
33.5 mph (54kph) crabbed impact
Side Impact – Regulatory Requirements
impact Impactor mass - 3015 lb US SID dummy in front and
rear seats Uses dummy injury measures
for regulation TTI(d) <= 85g for LTV’s and 4
door passenger cars TTI(d) <= 90g for 2 door
passenger cars
CE 264, Lecture 1 Slide #14
p g Pelvic Acceleration <= 130g TTI(d) = 0.5 X (Gr + Gs)
• Gr = Max. Rib Acc. • Gs = Lower spine Acc
Side Impact - Consumer Tests
Lateral/Side Impact New Car Assessment Program (LINCAP or SINCAP)
NHTSA issued an NPRM for side impact on May 19, 2004
59% of fatalities in side impact 38.5 mph (62kph) crabbed
impact 3015 lb (1370 Kg) impactor
mass SID dummy in front and rear
seats (SID/HIII for vehicles with side airbags)
Star rating based on TTI Pelvic Acceleration <= 130g
phad a brain injury
Promote head protection for all vehicle classes
20mph closing speed at 750
anticlockwise angle of approach into a rigid pole*
SID-IIs will be tested with the moving barrier and the oblique pole*
ES 2re to replace US DOT SID
CE 264, Lecture 1 Slide #15
Thoracic Trauma Index5 Stars <=524 Stars 57-723 Stars 72-912 Stars 91-981 Star 98 >=
ES-2re to replace US DOT SID
* Most likely
Side Impact - Consumer Tests
Insurance Institute for Highway Safety
New test implemented in Fall New test implemented in Fall 2003
Impactor mass - 1,500 Kg Impactor shape derived from
Ford F150 front profile 50 km/h perpendicular impact SIDII’s driver and rear passenger
dummies Seated using UMTRI seating
position
CE 264, Lecture 1 Slide #16
position

5
Side Impact - Consumer Tests
Purpose is to represent crash condition that poses
CE 264, Lecture 1 Slide #17
Purpose is to represent crash condition that poses greatest risk to occupants (Pick-up/SUV as striking vehicle)
Promote head protection
Rear Impact – Regulatory Requirements
Federal Motor Vehicle Safety Standard (FMVSS) 301
The purpose of this standard is to reduce deaths and injuries occurring from fires that result from fuel spillage during and after motor vehicle crashes
30 mph ( 48 kph) with a rigid rear moving barrier 50th percentile Hybrid III dummy in front driver and passenger
seats Vehicle is rotated on its longitudinal axis to each successive
CE 264, Lecture 1 Slide #18
Vehicle is rotated on its longitudinal axis to each successive increment of 900 and fuel spill is measured
Brief Introduction to Finite Element Methods
CE 264Non-linear Finite Element Modeling and Simulation
Source: Finite Element Primer for EngineersSource: Finite Element Primer for EngineersMike Barton & S. D. Rajan (Arizona state univ.)
Finite Element Method
Many problems in engineering and applied science are governed by differential or integral equations.
Th l i h i ld id The solutions to these equations would provide an exact, closed-form solution to the particular problem being studied.
However, complexities in the geometry, properties and in the boundary conditions that are seen in most
CE 264, Lecture 1 Slide #20
and in the boundary conditions that are seen in most real-world problems usually means that an exact solution cannot be obtained or obtained in a reasonable amount of time.

6
Finite Element Method
Current product design cycle times imply that engineers must obtain design solutions in a ‘short’ amount of time.
They are content to obtain approximate solutions that can be readily obtained in a reasonable time frame, and with reasonable effort. The FEM is one such approximate solution technique.
CE 264, Lecture 1 Slide #21
The FEM is a numerical procedure for obtaining approximate solutions to many of the problems encountered in engineering analysis.
Finite Element Method In the FEM, a complex region defining a continuum is
discretized into simple geometric shapes called elements.
The properties and the governing relationships are assumed o er these elements and e pressed mathematicall in termsover these elements and expressed mathematically in terms of unknown values at specific points in the elements called nodes.
An assembly process is used to link the individual elements to the given system. When the effects of loads and boundary conditions are considered, a set of linear or nonlinear algebraic equations is usually obtained
CE 264, Lecture 1 Slide #22
algebraic equations is usually obtained.
Solution of these equations gives the approximate behavior of the continuum or system.
Finite Element Method
The continuum has an infinite number of degrees-of-freedom (DOF), while the discretized model has a finite number of DOF. This is the origin of the name, finite element method.
The number of equations is usually rather large for most real-world applications of the FEM, and requires the computational power of a super computer. The FEM has little practical value if super computers were not available.
Advances in and ready availability of computers and software h b ht th FEM ithi h f i ki i
CE 264, Lecture 1 Slide #23
has brought the FEM within reach of engineers working in small industries, and even students.
Finite Element Method
Two features of the finite element method are worth noting.
The piecewise approximation of the physical field The piecewise approximation of the physical field (continuum) on finite elements provides good precision even with simple approximating functions. Simply increasing the number of elements can achieve increasing precision.
The locality of the approximation leads to sparse i f di i d bl Thi
CE 264, Lecture 1 Slide #24
equation systems for a discretized problem. This helps to ease the solution of problems having very large numbers of nodal unknowns. It is not uncommon today to solve systems containing a million primary unknowns.

7
Origin of FEM
It is difficult to document the exact origin of the FEM, because the basic concepts have evolved over a period of 150 or more years.
The term finite element was first coined by Clough in 1960. In the early 1960s, engineers used the method for approximate solution of problems in stress analysis, fluid flow, heat transfer, and other areas.
The first book on the FEM by Zienkiewicz and Chung was bli h d i 1967
CE 264, Lecture 1 Slide #25
published in 1967.
In the late 1960s and early 1970s, the FEM was applied to a wide variety of engineering problems.
Origin of FEM
The 1970s marked advances in mathematical treatments, including the development of new elements, and convergence studies.
Most commercial FEM software packages originated in the 1970s (ABAQUS, ADINA, ANSYS, MARK, PAFEC) and 1980s (FENRIS, LARSTRAN ‘80, SESAM ‘80.)
The FEM is one of the most important developments in computational methods to occur in the 20th century. In just a f d d th th d h l d f ith
CE 264, Lecture 1 Slide #26
few decades, the method has evolved from one with applications in structural engineering to a widely utilized and richly varied computational approach for many scientific and technological areas.
Advantages of FEM The FEM offers many important advantages to the design
engineer:
Easily applied to complex, irregular-shaped objects composed of se eral different materials and ha ing comple bo ndarof several different materials and having complex boundary conditions.
Applicable to steady-state, time dependent and eigenvalue problems.
Applicable to linear and nonlinear problems.
CE 264, Lecture 1 Slide #27
One method can solve a wide variety of problems, including problems in solid mechanics, fluid mechanics, chemical reactions, electromagnetics, biomechanics, heat transfer and acoustics, to name a few.
Sources of Error in FEM
The three main sources of error in a typical FEM solution are discretization errors, formulation errors and numerical errors.
Discretization error results from transforming the physical system (continuum) into a finite element model, and can be related to modeling the boundary shape, the boundary conditions, etc.
Formulation error results from the use of elements that don't precisely describe the behavior of the h i l bl
CE 264, Lecture 1 Slide #28
physical problem. Numerical error occurs as a result of numerical
calculation procedures, and includes truncation errors and round off errors

8
General FEA Process
Model Development - Pre-processing Discretize Geometry: Nodes/Elements Geometry properties: Thickness/Cross-section Material properties Loading conditions Constraints Boundary conditions
CE 264, Lecture 1 Slide #29
Solver - Solution processing Numerical solution of equations of motion
General FEA Process
Post-processing: Results Analysis Deformed geometry Displacements, velocities, accelerations Stress and strain Reaction forces Energies
FE Model Improvement
CE 264, Lecture 1 Slide #30
Update Model based on the analysis results Iterative process until objectives achieved
General FEA Process
Model Development - Pre-processing LS-INGRID, FEM-B I-DEAS, True-Grid, EasiCrash, , PATRAN, HyperMesh
Solver - Solution processing LS-DYNA, PamCrash, RADIOSS NASTRAN, ANSYS, Algor
Results Analysis - Post-processing
CE 264, Lecture 1 Slide #31
y p g LS-TAURUS, LS-POST HyperMesh
Background and History of LS-DYNA
1976 DYNA3D developed at Lawrence Livermore National
Laboratory by John HallquistL l it i t f h lid t t ilit Low velocity impact of heavy, solid structures, military applications
1979 DYNA3D ported on Cray-1 Improved sliding interface Order of magnitude faster
CE 264, Lecture 1 Slide #32
Order of magnitude faster 1981
New material models - Explosive-structure, Soil-structure
Impacts of penetration projectiles

9
Background and History of LS-DYNA
1986 Beams, Shells, Rigid Bodies Single Surface Contact Single Surface Contact Support for Multiple Computer Platforms
1988 Automotive Applications Support LS-DYNA
1989
CE 264, Lecture 1 Slide #33
1989 Full Commercial Version LSTC
Background and History of LS-DYNA
1993 Keyword Format Automatic Single Surface Contact 1st International LS-DYNA User Conference
1995 Training Lab Established at West Coast - LSTC
1997
CE 264, Lecture 1 Slide #34
Training Class Started at East Coast - NCAC/GWU Today
Release of Version LS971, Many New Features
General Capabilities
Transient dynamics Quasi-static simulations Flexible and rigid bodiesg Nonlinear material behavior More than 80 constitutive relationships More than 40 element formulation Finite strain and finite rotation General contact algorithm
CE 264, Lecture 1 Slide #35
Thermal Analysis Explicit and implicit analyses
Applications
Automotive, train, ship, and aerospace crashworthinessSheet and b lk forming process sim lation Sheet and bulk forming process simulation
Engine blade containment and bird strike analysis Seismic safety simulation Weapons design and explosive detonation simulation Biomechanics simulation
CE 264, Lecture 1 Slide #36
Industrial accidents simulation Drop and impact analysis of consumer product Roadside Hardware Analysis Virtual proving ground simulation

10
LS-DYNA Input File Format
Structured Input Format Original Format Organized by Entities
Fi d F t Fixed Format Keyword Input Format
Started 1993 More Flexible Easy to Modify Input Deck
CE 264, Lecture 1 Slide #37
Keyword Format Input File
*KEYWORD*TITLESAMPLE INPUT FILE *CONTROL_TERMINATION0.1000000 0 0.0000000 0 0.0000000
*NODE1 0.000000000E+00 0.000000000E+00 0.000000000E+002 7.000000000E+00 0.000000000E+00 0.000000000E+003 0.000000000E+00 7.000000000E+00 0.000000000E+00 4 7.000000000E+00 7.000000000E+00 0.000000000E+00
*DATABASE_BINARY_D3PLOT1.00000-3 0*DATABASE_BINARY_D3THDT1.00000-3*MAT_ELASTIC
1 7.89000-9 2.00000+5 0.3000000*SECTION_SOLID
1 0*SECTION_SHELL
1 21 0000000 1 0000000 1 0000000 1 0000000 0 0000000
5 0.000000000E+00 0.000000000E+00 7.000000000E+006 7.000000000E+00 0.000000000E+00 7.000000000E+007 0.000000000E+00 7.000000000E+00 7.000000000E+008 7.000000000E+00 7.000000000E+00 7.000000000E+00
*ELEMENT_SOLID1 1 1 2 4 3 5 6 8 7
*PARTPART NAME 1
2 2 2 0 0 0 0 0*ELEMENT_SHELL
1 2 1 2 4 3
CE 264, Lecture 1 Slide #38
1.0000000 1.0000000 1.0000000 1.0000000 0.0000000*PARTPART NAME 1
1 1 1 0 0 0 0 0
1 2 1 2 4 3*END
Keyword Format Input File Sections
Control, Material, Equation of State, Element, Parts, etc.
The “*” followed by keyword indicate beginning of a The followed by keyword indicate beginning of a section block.
The “$” used for Comment Cards Data blocks begin with keyword followed by data
pertaining to the keyword Multiple Blocks with the same keyword are
CE 264, Lecture 1 Slide #39
p ypermissible
Material and Contact types are defined by name Keywords are alphabetically organized in manual
Keyword Format Input File
*NODE NID x y z
*ELEMENT EID PID N1 N2 N3
*PART PID SID MID EOSID HGID
*SECTION_SHELL SID ELFORM SHRF NIP PROPT QR ICOMP
*MAT_ELASTIC MID RO E PR DA DB
CE 264, Lecture 1 Slide #40
*EOS EOSID
*HOURGLASS HGID

11
LS-DYNA Execution
Command Line
Examplels-dyna i=inputfile
CE 264, Lecture 1 Slide #41
ls940 r=d3dump01 memory=12000000ls971s i= inputfile
LS-DYNA Execution
CE 264, Lecture 1 Slide #42
LS-DYNA Output Files
d3hsp message d3plot,d3plot01,… d3thdt,d3thdt01, … d3dump01, … runrsf Ascii files (glstat, nodout, deforc, ..etc)
CE 264, Lecture 1 Slide #43
(g )
CAE Influence on Vehicle Development Process (VDP)
CE 264Non-linear Finite Element Modeling and Simulation

12
History of Numerical Simulations
Explicit FE codes were developed in the 60’s and 70’s at the Defense Labs in the US
First full vehicle car crash models were built and l d i th id 80’ h j tanalyzed in the mid 80’s as a research project
Introduction of supercomputers (cray) made it possible to run a full vehicle crash model
Development of the codes continue to make numerical solutions stable and accurateNumerical simulation has become a fully integrated
CE 264, Lecture 1 Slide #45
Numerical simulation has become a fully integrated tool in the vehicle development process in the last decade
History of Numerical Simulations
Difficult to conceive a vehicle design with today’s constraints of regulations and safety without any simulation at allAccurate and robust analytical tools using state of Accurate and robust analytical tools using state-of-the-art in computational mechanics and computer hardware are indispensable for crash simulations
The contribution of simulation lies in that it complements a testing facility by preventing unnecessary work from being done
CE 264, Lecture 1 Slide #46
y g The ideal picture is indeed one of a design, heavily
supported by analysis, resulting in building of only those prototypes that are almost certain to pass all final verification testing
Evolution of CAE in Crashworthiness
RegulatoryRequirements
FE ModelSize (elem)
Prototypes reqd. for crash testing
1985 1 10000 150
Year
1990
1995
2000
5
20000
80000
0 5M Mad
e po
ssib
le b
y up
erco
mpu
ters
120
100
50 ifica
nt c
ost s
avin
gs
Red
uce
Inju
ries &
Fata
litie
s
CE 264, Lecture 1 Slide #47
All numbers shown here are estimates only,and should be treated as such
2000
Today >20
0.5M
>1M
M su 50
<20
Sign
i
Engineering Analysis
Engineering Analysis Methods
Numerical methodsClassical methods
Exact Approximate EnergyBoundaryElement
Finite Difference
Finite Elements
CE 264, Lecture 1 Slide #48
CAE: Uses Engineering analysis tools primarily FE, BE and FD methods
Linear / Non-Linear: based on material, loadingStatic / Dynamic: Temporal variation in loading, boundary conditions Quasi Static /Transient are sub-cases of above

13
FE Crashworthiness
FE crashworthiness analysis of vehicles in particular, is among the most challenging nonlinear problems in structural mechanicsVehicle structures are typically manufactured from Vehicle structures are typically manufactured from many stamped thin shell parts and subsequently assembled by various welding and fastening techniques
The body-in-white may contain steel of various strength grades, aluminum and/or composite
CE 264, Lecture 1 Slide #49
g gmaterials
• Validation of Structure: Component, Subsystem and System
• Ride Comfort: NVH, Cabin Acoustics, Passenger Efforts (eg: Door opening)
• Handling: Vehicle Dynamics Analysis, Kinematics
Automotive CAE requirements
Handling: Vehicle Dynamics Analysis, Kinematics
• Safety: Crash (Front, Rear, Side, Roof)
• Durability: Life of components during real-life vehicle loading of variable severity, Fatigue life-cycle analysis
• Fuel Economy, Aerodynamics
CE 264, Lecture 1 Slide #50
• Cross-functional as well as individual optimizations for cost, weight and investment (CWI)
Pre–processing (FE modeling):
Hypermesh: Standard for Automotive CAE modeling ( good for solid modeling, auto/manual meshing edits and all quality checks)
ANSA: Superior to HM for Shell meshing and assembly but inferior for solid models
Automotive CAE Tools
Others: Easi-Crash, LS-Pre, Oasys, I-DEAS, PATRAN
Solvers:
MSC NASTRAN: Best in class for Linear, dynamic and optimization type analyses (best for NVH, Durability)
LS-DYNA: Non-Linear, large deformation, Crash type analysisADAMS: Vehicle dynamicsMADYMO: Occupant simulation
CE 264, Lecture 1 Slide #51
MADYMO: Occupant simulationOther: ANSYS (multi-physics problems)
Post-processing:
LS-POST, Hyperview, Easi-Crash etc.,
StrategicDirection
ProgramStart
ConfirmProgramVision
Concept Selection& Major Hardpoints
Approval:Theme
SelectionTheme
Confirmation Prototype S0 Start S1 StartVolumeProd.
Week WeekWeek
48 month VDP
Pre-Program
ReferenceBaseline
Digital Mule Theme
DORs
DOR+
DigitalPrototype
Post S0Refinement
1st physicalValidation
208WBVP
Week80
Week150
CE 264, Lecture 1 Slide #52
Phase Main window for Digital/Virtual Vehicle
development Validation Phase
prototype
Program name(sample): 02LH

14
StrategicDirection
ProgramDefinition
PD
Program Implement
P1
ThemeDecision
TD
Program Confirm
PC
PrototypeConfirmDesign
CP S0 LR J1Program Redesign
PR
48 month VDP
• Design Alternatives• Major Architectural
ArchitectureSelected
Clay modelcomplete
Month48
324Month43
3337StructuralPrototype
SP
21 17 727
Engineering& Manufacturing
sign off
CE 264, Lecture 1 Slide #53
jChanges
• High Design Freedom• High CAE contributions• Limited Vehicle specificdata
• Design specs available• Minor modifications to design• Lower design freedom• More of optimization followingredesign to targets
• Full Design specs available• Tuning with prototype testing• Proving ground data• CAE in reactive and correlationmode
Influence on Vehicle Safety
2001 Model Year 2004 Model Year
CE 264, Lecture 1 Slide #54
Crashworthiness Model Requirements
The models should satisfy at a minimum the following overall requirements: Accuracy – the model should be able to yield
reasonably accurate predictions of the essential y pfeatures being sought
Speed – the model should be executable with a reasonable turnaround time, not to exceed 12 hours regardless of its size, to allow for iterations and parameter studies
Robustness – small variations in model parameters should not yield large variations in model responses
CE 264, Lecture 1 Slide #55
should not yield large variations in model responses Development time – the model should be built in a
reasonably short period of time, not to exceed two weeks
Structure Design for Crashworthiness
CE 264, Lecture 1 Slide #56
15
Automotive Body
CE 264, Lecture 1 Slide #57
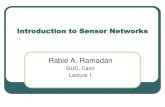
Automotive Body - Structure
Two types of body structures (Body-In-White) Unibody (passenger car) Ladder frame (trucks/SUV) Ladder frame (trucks/SUV)
CE 264, Lecture 1 Slide #58
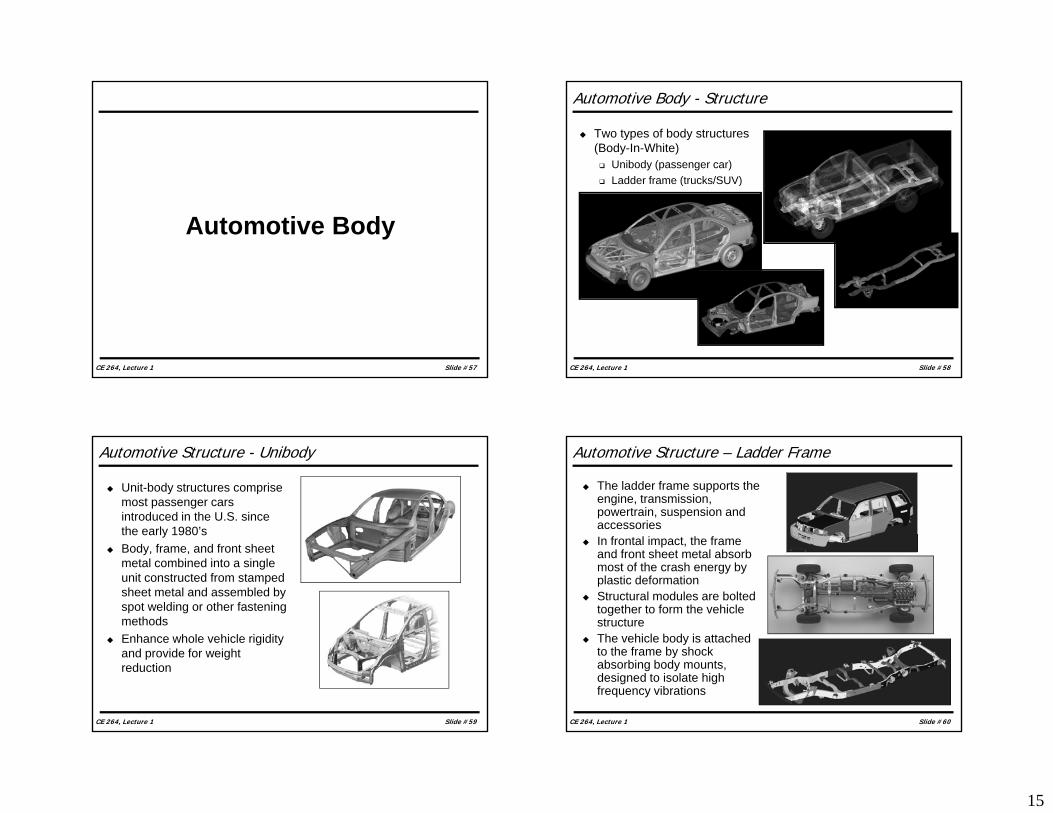
Automotive Structure - Unibody
Unit-body structures comprise most passenger cars introduced in the U.S. since the early 1980’sthe early 1980 s
Body, frame, and front sheet metal combined into a single unit constructed from stamped sheet metal and assembled by spot welding or other fastening methods
CE 264, Lecture 1 Slide #59
Enhance whole vehicle rigidity and provide for weight reduction
Automotive Structure – Ladder Frame
The ladder frame supports the engine, transmission, powertrain, suspension and accessories
In frontal impact, the frame and front sheet metal absorb most of the crash energy by plastic deformation
Structural modules are bolted together to form the vehicle structure
CE 264, Lecture 1 Slide #60
The vehicle body is attached to the frame by shock absorbing body mounts, designed to isolate high frequency vibrations

16
Body-In-White (BWI)
Firewall – separates engine from compartment
Center Tunnel –d t th h t
Occupant Compartment
accommodates the exhaust pipes and drive-shaft
Sills – Profiled longitudinal beams designed in two shell construction
Side Frame – A,B,C and D pillars
CE 264, Lecture 1 Slide #61
Side Panel – External side panels
Floor Assembly – forms the back-bone for the entire body
Roof
Body-In-White (BWI)
Underframe/Cradle Used as an engine and/or
suspension mount
Front End
Provides torsional stiffness to the structure
Bolted through vibration dampers to the front rails
Cross member Strong welded steel or
magnesium structure (or
CE 264, Lecture 1 Slide #62
magnesium structure (or single cast piece)
Transfers energy to the opposite side in the event of a severe side or angular collision
Body-In-White (BWI)
Front rails most important part in the front
end structure Absorb a great deal of the
Front End
Absorb a great deal of the energy in a frontal crash (typically about 40 KN/rail for compact cars)
Complex and strong interaction with FBHP, firewall, etc..
Have crush initiators and deformation aids to crush in a controlled manner
Deformation Aid
CE 264, Lecture 1 Slide #63
controlled manner
Crush Initiators
Body-In-White (BWI)
Wheel Houses Extremely strong by virtue
of their shape
Front End
Incorporate strengtheners, beads, and offsets
Upper side member Positioned along the entire
length of the wheel houseAbsorbs additional energy
CE 264, Lecture 1 Slide #64
Absorbs additional energy during severe frontal collisions
Incorporate reinforcements

17
Body-In-White (BIW)
Simpler design compared to front
Based on a closed box design
Rear End
Rails are incorporated to dissipate energy
Panels around the wheelhouse provide additional support
Strong B-pillarsSide Protection
CE 264, Lecture 1 Slide #65
Door beams positioned to engage the barrier
Door trims have foam padding to minimize hard contact points on impact