Digital Image Processing CSC331 Morphological image processing 1.
Upload
gregory-powellCategory
view
214download
0

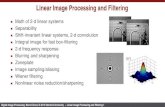
Lecture 03 Lecture 03 Area Based Image Processing Area Based Image Processing
Mata kuliah : T0283 - Computer VisionTahun : 2010

January 20, 2010 T0283 - Computer Vision 3
Learning ObjectivesLearning Objectives
After carefullyAfter carefully listening this lecture, students will listening this lecture, students will be able to do the following :be able to do the following :
understand spatial information based image understand spatial information based image operation operation such as area-based processingsuch as area-based processing
demonstrate how area-based image processing demonstrate how area-based image processing is is performed (i.e. convolution-based image performed (i.e. convolution-based image processing)processing)

January 20, 2010 T0283 - Computer Vision 4
What is a Mask ?What is a Mask ?
A mask is a small matrix whose values are called A mask is a small matrix whose values are called weightsweights
Each mask has an origin, which is usually one of its positionsEach mask has an origin, which is usually one of its positions
The origin of symmetric masks are usually their center pixel The origin of symmetric masks are usually their center pixel positionposition
For non-symmetric masks, any pixel location may be chosen For non-symmetric masks, any pixel location may be chosen as the origin (depending on the intended use)as the origin (depending on the intended use)
11 11 11 11 22 11 11
11 11 11 22 44 22 11
11 11 11 11 22 11 11
11

January 20, 2010 T0283 - Computer Vision 5
Linear filtering is filtering in which the value of an Linear filtering is filtering in which the value of an output pixel is a linear combination of the values of output pixel is a linear combination of the values of the pixels in the input pixel's neighborhood.the pixels in the input pixel's neighborhood.
Linear filtering of an image is accomplished through Linear filtering of an image is accomplished through an operation called an operation called convolutionconvolution. .
Convolution is a neighborhood operation in which each Convolution is a neighborhood operation in which each output pixel is the weighted sum of neighboring input output pixel is the weighted sum of neighboring input pixels. The matrix of weights is called the convolution pixels. The matrix of weights is called the convolution kernel, also known as the filter.kernel, also known as the filter.
Applying Masks to Images : Linear Applying Masks to Images : Linear FilteringFiltering

January 20, 2010 T0283 - Computer Vision 6
Applying Masks to Images : Linear Applying Masks to Images : Linear FilteringFiltering

January 20, 2010 T0283 - Computer Vision 7
Rotate the convolution kernel 180 degrees about its Rotate the convolution kernel 180 degrees about its center element.center element.
Slide the center element of the convolution kernel so Slide the center element of the convolution kernel so that it lies on top of the (2,4) element of A.that it lies on top of the (2,4) element of A.
Multiply each weight in the rotated convolution kernel Multiply each weight in the rotated convolution kernel by the pixel of A underneath.by the pixel of A underneath.
Sum the individual products from step 3.Sum the individual products from step 3.
Hence the (2,4) output pixel is Hence the (2,4) output pixel is
1*2 + 8*9 + 15*4 + 7*7 + 14*5 + 16*3 + 13*6 1*2 + 8*9 + 15*4 + 7*7 + 14*5 + 16*3 + 13*6 + 20*1 + 22*8 = 575+ 20*1 + 22*8 = 575
Computing the (2,4) Output of Computing the (2,4) Output of ConvolutionConvolution

January 20, 2010 T0283 - Computer Vision 8
Computing the (2,4) Output of Computing the (2,4) Output of ConvolutionConvolution
1717 2424 11 88 1515
2323 55 77 1414 1616
44 66 1313 2020 2222
1010 1212 1919 2121 33
1111 1818 2525 22 99
22 99 44
77 55 33
66 11 88
Image pixel Image pixel valuesvalues
Center of Center of KernelKernel
Values of rotated KernelValues of rotated Kernel

January 20, 2010 T0283 - Computer Vision 9
Slide the center element of the correlation kernel so Slide the center element of the correlation kernel so that it lies on top of the (2,4) element of A.that it lies on top of the (2,4) element of A.
Multiply each weight in the rotated correlation kernel Multiply each weight in the rotated correlation kernel by the pixel of A underneath.by the pixel of A underneath.
Sum the individual products from step 2.Sum the individual products from step 2.
Hence the (2,4) output pixel is Hence the (2,4) output pixel is
1*8 + 8*1 + 15*6 + 7*3 + 14*5 + 16*7+ 13*4 1*8 + 8*1 + 15*6 + 7*3 + 14*5 + 16*7+ 13*4 + 20*9 + 22*2 = 585+ 20*9 + 22*2 = 585
Computing the (2,4) Output of Computing the (2,4) Output of CorrelationCorrelation

January 20, 2010 T0283 - Computer Vision 10
1717 2424 11 88 1515
2323 55 77 1414 1616
44 66 1313 2020 2222
1010 1212 1919 2121 33
1111 1818 2525 22 99
88 11 66
33 55 77
44 99 22
Image pixel Image pixel valuesvalues
Center of Center of KernelKernel
Values of Correlation KernelValues of Correlation Kernel
Computing the (2,4) Output of Computing the (2,4) Output of CorrelationCorrelation

January 20, 2010 T0283 - Computer Vision 11
Dealing with Image BordersDealing with Image Borders
Only convolve with interiorOnly convolve with interiorShrinks imageShrinks image
Zero-paddingZero-paddingResults in spurious gradientsResults in spurious gradients
Border replicationBorder replication
33
22
11
22
22
11
33
22
3322
2211
2222
3322
11-2-2-1-1
2244-1-1
111111

January 20, 2010 T0283 - Computer Vision 12
Filtering Example Filtering Example How to treat image borders : Zero PaddingHow to treat image borders : Zero Padding
11 -1-1 -1-1
11 22 -1-1
11 11 11
22 22 22 33
22 11 33 33
22 22 11 22
11 33 22 22Rotate
11-1-1-1-1
1122-1-1
111111

January 20, 2010 T0283 - Computer Vision 13
33
22
11
22
22
11
33
22
3322
2211
2222
3322 55
33
22
11
22
22
11
33
22
3322
2211
2222
3322
11-2-2-1-1
2244-1-1
111111
11-1-1-1-1
1122-1-1
111111
Step 1Step 1

January 20, 2010 T0283 - Computer Vision 14
33
22
11
22
22
11
33
22
3322
2211
2222
3322 4455
33
22
11
22
22
11
33
22
3322
2211
2222
3322
33-1-1-2-2
2244-2-2
111111
11-1-1-1-1
1122-1-1
111111
Step 2Step 2

January 20, 2010 T0283 - Computer Vision 15
33
22
11
22
22
11
33
22
3322
2211
2222
3322 44 4455
33
22
11
22
22
11
33
22
3322
2211
2222
3322
33-3-3-1-1
3344-2-2
111111
11-1-1-1-1
1122-1-1
111111
Step 3Step 3

January 20, 2010 T0283 - Computer Vision 16
33
22
11
22
22
11
33
22
3322
2211
2222
3322 44 44 -2-255
33
22
11
22
22
11
33
22
3322
2211
2222
3322
11-3-3-3-3
1166-2-2
111111
11-1-1-1-1
1122-1-1
111111
Step 4Step 4

January 20, 2010 T0283 - Computer Vision 17
33
22
11
22
22
11
33
22
3322
2211
2222
3322 44 44
99
-2-255
33
22
11
22
22
11
33
22
3322
2211
2222
3322
22-2-2-1-1
1144-1-1
222211
11-1-1-1-1
1122-1-1
111111
Step 5Step 5

January 20, 2010 T0283 - Computer Vision 18
Final ResultFinal Result
22 22 22 33
22 11 33 33
22 22 11 22
11 33 22 22 1212
77
66
44
88
66
1414
44
5599
5599
551111
-2-255
I’I

January 20, 2010 T0283 - Computer Vision 19
Smoothing (Low Pass Filtering)Smoothing (Low Pass Filtering)
Useful for noise reduction and image blurringUseful for noise reduction and image blurring
It removes the finer details of an imageIt removes the finer details of an image
Averaging or Mean (Box) FilterAveraging or Mean (Box) FilterThe elements of the mask must be positiveThe elements of the mask must be positive
The size of the mask determines the degree of smoothingThe size of the mask determines the degree of smoothing
111111
111111
111111
3 x 3 box filter kernel

January 20, 2010 T0283 - Computer Vision 20
Gaussian Filter (LPF)Gaussian Filter (LPF)
The weights are sampled from a Gaussian function which The weights are sampled from a Gaussian function which fall off to zero at the mask’s edgesfall off to zero at the mask’s edges
0.003 0.013 0.022 0.013 0.0030.013 0.059 0.097 0.059 0.0130.022 0.097 0.159 0.097 0.0220.013 0.059 0.097 0.059 0.0130.003 0.013 0.022 0.013 0.003
5 x 5, = 1

January 20, 2010 T0283 - Computer Vision 21
Gaussian Filter (cont’d)Gaussian Filter (cont’d)
Gaussian smoothing can be implemented efficiently, Gaussian smoothing can be implemented efficiently, thanks to the fact that the kernel is thanks to the fact that the kernel is separableseparable

January 20, 2010 T0283 - Computer Vision 22
To convolve an image To convolve an image II with a n x n Gaussian mask with a n x n Gaussian mask GG with with = = GG
Build a 1-D Gaussian mask Build a 1-D Gaussian mask gg, of width n, with , of width n, with gg= = GG
Convolve each column of Convolve each column of II with with gg, yielding a ne image , yielding a ne image IIccConvolve each row of Convolve each row of IIcc with with gg
The value of The value of determines degree of smoothingdetermines degree of smoothing
Gaussian Filter (cont’d)Gaussian Filter (cont’d)

January 20, 2010 T0283 - Computer Vision 23
Gaussian Filter (examples)Gaussian Filter (examples)
= 1 = 3
7 x 7 kernel
Original image Box filter

January 20, 2010 T0283 - Computer Vision 24
Median Filter (non-linear)Median Filter (non-linear)
Effective for removing “salt & pepper” noise Effective for removing “salt & pepper” noise (random occurences of black & white pixels)(random occurences of black & white pixels)
Replace each pixel value by the median of the gray-Replace each pixel value by the median of the gray-levels in the neighborhood of the pixelslevels in the neighborhood of the pixels
10 20 20 15 99 20 20 25 2010 20 20 15 99 20 20 25 20
10 15 20 20 20 20 20 25 9910 15 20 20 20 20 20 25 99
sort
median

January 20, 2010 T0283 - Computer Vision 25
Median Filter (non-linear)Median Filter (non-linear)

January 20, 2010 T0283 - Computer Vision 26
Median Filter (non-linear)Median Filter (non-linear)

January 20, 2010 T0283 - Computer Vision 27
Sharpening (High Pass Filtering)Sharpening (High Pass Filtering)
It is used to emphasize the fine details of an imageIt is used to emphasize the fine details of an image
Points of high contrast can be detected by computing Points of high contrast can be detected by computing intensity differences in local image regionsintensity differences in local image regions
The weights of the mask are both positive and negativeThe weights of the mask are both positive and negative
When the mask is over an area of constant or slowly When the mask is over an area of constant or slowly varying gray level, the result of convolution will be close to varying gray level, the result of convolution will be close to zerozero
When gray level is varying rapidly within the neighborhood, When gray level is varying rapidly within the neighborhood, the result of convolution will be a large numberthe result of convolution will be a large number
Typically, such points form the border between different Typically, such points form the border between different objects or scene parts (i.e., sharpening is a precursor step objects or scene parts (i.e., sharpening is a precursor step to edge detectionto edge detection

January 20, 2010 T0283 - Computer Vision 28
Sharpening (cont’d)Sharpening (cont’d)