
Learning Financial Market Data with Recurrent Autoencoders and TensorFlow
21
Learning Financial Market Data with Recurrent Autoencoders and TensorFlow . Steven Hutt [email protected] July 28, 2016 TensorFlow London Meetup
-
Upload
altoros -
Category
Technology
-
view
1.178 -
download
0
Transcript of Learning Financial Market Data with Recurrent Autoencoders and TensorFlow

Learning Financial Market Datawith Recurrent Autoencoders and TensorFlow.
Steven Hutt [email protected] 28, 2016
TensorFlow London Meetup
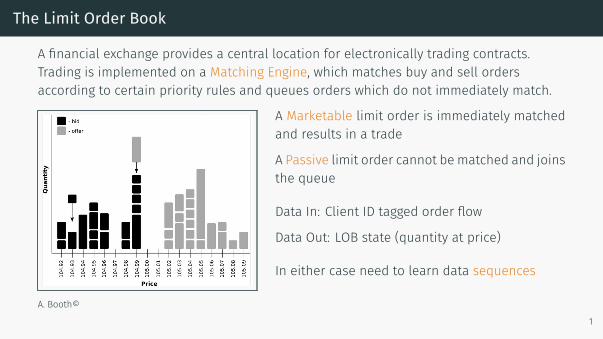
The Limit Order Book
A financial exchange provides a central location for electronically trading contracts.Trading is implemented on a Matching Engine, which matches buy and sell ordersaccording to certain priority rules and queues orders which do not immediately match.
A. Booth©
A Marketable limit order is immediately matchedand results in a trade
A Passive limit order cannot be matched and joinsthe queue
Data In: Client ID tagged order flow
Data Out: LOB state (quantity at price)
In either case need to learn data sequences
1

Learning Sequences with RNNs
In a Recurrent Neural Network there are nodes which feedback on themselves. Belowxt ∈ Rnx , ht ∈ Rnh and zt ∈ Rnz , for t = 1, 2, . . . , T. Each node is a vector or 1-dim array.
..
output
.state .
input
.
zt
.ht.
xt
.
Whx
. Whh.
Wzh
. h0.
z1
.
z2
.
z3
. h1. h2. h3.
x1
.
x2
.
x3
.
zT
. hT.
xT
.
· · ·
. · · ·.
· · ·
The RNN is defined by update equations:
ht+1 = f(Whhht +Whxxt + bh), zt = g(Wyhht + bz).
where Wuv ∈ Rnu×nv and bu ∈ Rnu are the RNN weights and biases respectively. Thefunctions f and g are generally nonlinear.
2
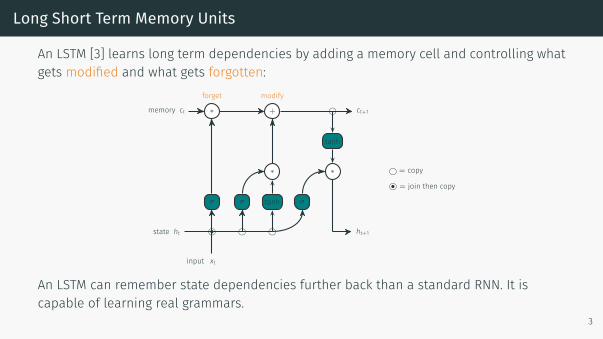
Long Short Term Memory Units
An LSTM [3] learns long term dependencies by adding a memory cell and controlling whatgets modified and what gets forgotten:
..memory ct .
state ht
.∗.forget
. +.modify
.
σ
.
σ
.
tanh
.
σ
.
∗
.
∗
.
tanh
.
•
.
⃝
.
⃝
.
⃝
.. ⃝.. ct+1.
ht+1
.
xt
.
input
.
⃝
.
= copy
.
•
.
⃝
.
= join then copy
An LSTM can remember state dependencies further back than a standard RNN. It iscapable of learning real grammars.
3

Unitary RNNs
The behaviour of the LSTM can be difficult to analyse.
An alternative approach [1] is to ensure there are no contractive directions, that isrequire Whh ∈ U(n), the space of unitary matrices.
This preserves the simple form of an RNN but ensures the state dependencies go furtherback in the sequence.A key problem is that gradient descent does not preservethe unitary property:
x ∈ U(n) 7→ x+ λυ /∈ U(n)
The solution in [1] is to choose Whh from asubset generated by parametrized unitarymatrices:
Whh = D3R2F−1D2ΠR1FD1.
Here D is diagonal, R is a reflection, F is the Fourier trans-form and Π is a permutation. 4

RNNs as Programs addressing External Memory
RNNs are Turing complete but the theoretical capabilities are not matched in practicedue to training inefficiencies.
The Neural Turing Machine emulates a differentiable Turing Machine by adding externaladdressable memory and using the RNN state as a memory controller [2].
..
Input xt
.
Output yt
.RNN Controller.RNN Controller.RNN Controller.
Read Heads
.
Write Heads
.
Memory
.
ml
.
ml
Vanila NTM Architecture
NTM equivalent 'code'initialise: move head to start locationwhile input delimiter not seen do
receive input vectorwrite input to head locationincrement head location by 1
end whilereturn head to start locationwhile true do
read output vector from head locationemit outputincrement head location by 1
end while 5

Deep RNNs
..
out
.
L3
.
L2
.L1 .
in
.
zt
.
h3t
.
h2t
.h1t.
xt
.
Wh1x
. Wh1h1
.
Wh2h2
.
Wh3h3
.
h1t
.
h2t
.
Wzh3
.
h30
.
h20
. h10.
z1
.
z2
.
z3
.
h31
.
h32
.
h33
.
h21
.
h22
.
h23
. h11. h12. h13.
x1
.
x2
.
x3
.
zT
.
h3T
.
h2T
. h1T.
xT
.
· · ·
.
· · ·
.
· · ·
. · · ·.
· · ·
The input to hidden layer Li is the state hi−1 of hidden layer Li−1. Deep RNNs can learn atdifferent time scales.
6

Autoencoders
The more regularities there are in data the more it can be compressed. The morewe are able to compress the data, the more we have learned about the data.
(Grünwald, 1998)
..
x1
.
x2
.
x3
.
x4
.
x5
.
x6
.
h11
.
h12
.
h13
.
h14
.
h21
.
h22
.
h31
.
h32
.
h33
.
h34
.
y1
.
y2
.
y3
.
y4
.
y5
.
y6
.
input
.
code
.
reconstruct
.
encode
.
decode
.Wh1x
.Wh2h1
.Wh3h2
.Wyh3
Autoencoder7

Recurrent Autoencoders
.. he0. he1. he2. he3.
x1
.
x2
.
x3
. heT.
xT
. · · ·.
· · ·
. hd0.
z1
.
z2
.
z3
. hd1. hd2. hd3.
z0
.
z1
.
z2
.
zT
. hdT.
zT−1
.
· · ·
. · · ·.
· · ·
. =
encoder decoder
A Recurrent Autoencoder is trained to output a reconstruction z of the the inputsequence x. All data must pass through the narrow heT . Compression between input andoutput forces pattern learning.
8
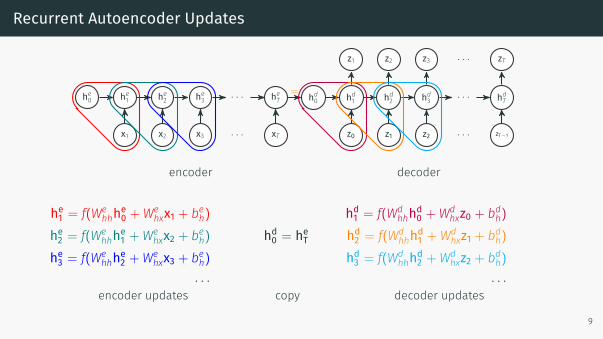
Recurrent Autoencoder Updates
.. he0. he1. he2. he3.
x1
.
x2
.
x3
. heT.
xT
. · · ·.
· · ·
................ hd0.
z1
.
z2
.
z3
. hd1. hd2. hd3.
z0
.
z1
.
z2
.
zT
. hdT.
zT−1
.
· · ·
. · · ·.
· · ·
. =...............
encoder decoder
he1 = f(Wehhhe0 +We
hxx1 + beh)he2 = f(We
hhhe1 +Wehxx2 + beh)
he3 = f(Wehhhe2 +We
hxx3 + beh)· · ·
encoder updates
hd0 = heT
copy
hd1 = f(Wdhhhd0 +Wd
hxz0 + bdh)hd2 = f(Wd
hhhd1 +Wdhxz1 + bdh)
hd3 = f(Wdhhhd2 +Wd
hxz2 + bdh)· · ·
decoder updates
9

Easy RNNs with TensorFlow VariableScope
def linear(in_array, out_size):in_size = in_array.get_shape()# creates or returns a variableW = vs.get_variable(shape=[in_size, out_size], name='W')# out_array = in_array * Wout_array = math_ops.matmul(in_array, W)return out_array
with tf.variable_scope('encoder_0') as scope:# creates variable encoder_0/Wout_array_1 = linear(in_array_0, out_size_1)
# error: encoder_0/W already exists# out_array_2 = linear(out_array_1, out_size_2)
# reuse encoder_0/Wscope.reuse_variables()out_array_2 = linear(out_array_1, out_size_2)
10

TensorFlow encoder
with tf.variable_scope('encoder_0') as scope:for t in range(1, seq_len):
# placeholder for input data at time txs_0_enc[t] = tf.placeholder(shape=[None, nx_enc])# encoder update at time ths_0_enc[t] = lstm_cell_l0_enc(xs_0_enc[t], hs_0_enc[t-1])scope.reuse_variables() 11
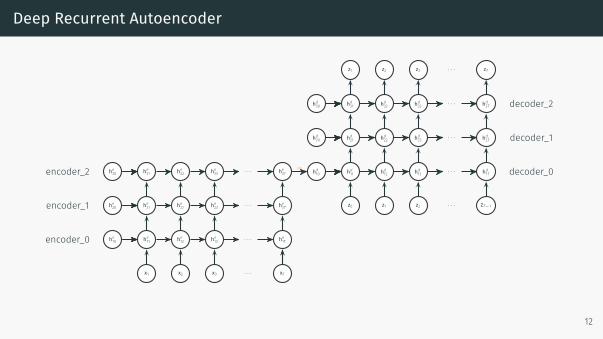
Deep Recurrent Autoencoder
...
encoder_2
.
encoder_1
.encoder_0.
he30
.
he20
. he10.
he31
.
he32
.
he33
.
he21
.
he22
.
he23
. he11. he12. he13.
x1
.
x2
.
x3
.
he3T
.
he2T
. he1T.
xT
.
· · ·
.
· · ·
. · · ·.
· · ·
.
decoder_2
.
decoder_1
.
decoder_0
.
hd30
.
hd20
.
hd10
.
hd31
.
hd32
.
hd33
.
hd21
.
hd22
.
hd23
.
hd11
.
hd12
.
hd13
.
z1
.
z2
.
z3
.
z0
.
z1
.
z2
.
hd3T
.
hd2T
.
hd1T
.
zT−1
.
zT
.
· · ·
.
· · ·
.
· · ·
.
· · ·
.
· · ·
.
=
12

TensorFlow Deep Recurrent AutoEncoder
with tf.variable_scope('encoder_0') as scope:for t in range(1, seq_len):
# placeholder for input dataxs_0_enc[t] = tf.placeholder(shape=[None, nx_enc])hs_0_enc[t] = lstm_cell_l0_enc(xs_0_enc[t], hs_0_enc[t-1])scope.reuse_variables()
with tf.variable_scope('encoder_1') as scope:for t in range(1, seq_len):
# encoder_1 input is encoder_0 hidden statexs_1_enc[t] = hs_0_enc[t]hs_1_enc[t] = lstm_cell_l1_enc(xs_1_enc[t], hs_1_enc[t-1])scope.reuse_variables()
with tf.variable_scope('encoder_2') as scope:for t in range(1, seq_len):
# encoder_2 input is encoder_1 hidden statexs_2_enc[t] = hs_1_enc[t]hs_2_enc[t] = lstm_cell_l2_enc(xs_2_enc[t], hs_2_enc[t-1])scope.reuse_variables() 13

Variational Autoencoder
We assume the market data {xk} is sampled from a probability distribution with a 'small'number of latent variables h.
Assume pθ(x,h) = pθ(x |h)pθ(h) where θ are
weights of a NN/RNN. Then
pθ(x) =∑h
pθ(x |h)pθ(h)
Train network to minimize
Lθ({xk}) = minθ
∑k
− log(pθ(xk)).
Compute pθ(h | x) and cluster.
But pθ(h | x) is intractable!
..h.
x
. pθ(h).
pθ(x)
. prior.
likelihood
.
marginal
.
posterior
.
p(x | h)
.
pθ(h | x)
14

Variational Inference
Variational Inference learns an NN/RNN approximation qϕ(h | x) to pθ(h | x) duringtraining.
Think of qϕ as encoder and pθ decoder networks: an autoencoder.
Then logpθ(xk) ≥ Lθ,ϕ(xk) where
Lθ,ϕ(xk) = −DKL(qϕ(h | xk)||pθ(h))︸ ︷︷ ︸regularization term
+ Eqϕ(logpθ(xk |h))︸ ︷︷ ︸reconstruction term
is the variational lower bound.
Reconstruction term = log-likelihood wrt qϕ
Regularization term = target prior on encoder
..h.
x
. pθ(h).
pθ(x)
. prior.
likelihood
.
marginal
.
approx
.
pθ(x | h)
.
qϕ(h | x)
15
Search
Train a Deep Recurrent Autoencoder onpublic market data (book state over time)
Use the trained encoder as hash function
Search based on Euclidean or Hammingdistance (after binary projection)
16

Classify
EUR vs AUD
Train a Variational Recurrent Autoencoder with Gaus-sian prior on public market data
Include two contracts: EUR and AUD in training data
Use trained encoder to infer Gaussian means fromtraining data
17

Predict
Train an LSTM on sequences of states of the LOB to predict changes in best bid.
Target data: change in best bid over time t→ t+ 1.
LSTM output: zt = softmax distribution for best bid moves (−1, 0,+1) over time t→ t+ 1.
It's tough to make predictions, especially about the future.
target
predict
18

Questions?
18

References
M. Arjovsky, A. Shah, and Y. Bengio.Unitary evolution recurrent neural networks.arXiv:1511.06464v4, 2016.A. Graves, G. Wayne, and I. Danihelka.Neural turing machines.arXiv:1410.5401v2, 2014.S. Hochreiter and J. Schmidhuber.Long short term memory.Neural Computation, 9:1735--1780, 1997.
19









![Autoencoders and Generative Adversarial Nets€¦ · Autoencoders and Generative Adversarial Nets Chapter 1 [ 5 ] Fixing corrupted data with denoising autoencoders The autoencoders](https://static.fdocuments.in/doc/165x107/5ec5f59990ca1d693c706157/autoencoders-and-generative-adversarial-nets-autoencoders-and-generative-adversarial.jpg)








