Le Global Positioning System (GPS) - Purdue...
23
http://www-gpsg.mit.edu/~fresh/index.html Precision Time series = successive estimates of site position + formal errors First order analysis: • Fit a straight line using a least square adjustment and compute a standard deviation • Slope • Associated uncertainty (decreases as 1/sqrt[#samples]) • Compute the weighted rms of the scatter to the weighted mean (or to a model) = "long term repeatability y i and σ i = position and associated formal error from the inversion N = number of data points Comparison of repeatability and standard deviation: • Standard deviation is very low and decreases as 1/sqrt[#samples]) • Repeatability is a more realistic estimate of the true error but assumes that each estimate is independent = no temporal correlation ∑ ∑ = = + − − = N i i N i i i i bt a y N N wrms 1 2 1 2 2 )) ( ( 1 σ σ
-
Upload
trinhthuan -
Category
Documents
-
view
216 -
download
0
Transcript of Le Global Positioning System (GPS) - Purdue...

http://www-gpsg.mit.edu/~fresh/index.html
PrecisionTime series = successive estimates of site position + formal errorsFirst order analysis:
• Fit a straight line using a least square adjustment and compute a standard deviation
• Slope• Associated uncertainty (decreases as
1/sqrt[#samples])• Compute the weighted rms of the scatter to the
weighted mean (or to a model) = "long term repeatability
yi and σi = position and associated formal error from the inversionN = number of data pointsComparison of repeatability and standard deviation:
• Standard deviation is very low and decreases as 1/sqrt[#samples])
• Repeatability is a more realistic estimate of the true error but assumes that each estimate is independent = no temporal correlation
∑
∑
=
=
+−−= N
ii
N
i i
ii btayNN
wrms
1
2
12
2))((1
σ
σ

Noise models• 150 km baseline across the San
Jacinto active fault, 2.5 years of continuous GPS observations
• Linear trend ⇒ fault slip rate: 16.9 ±0.6 mm/yr
• Comparison with "simulated campaigns":
• Difference between continuous up to 10 mm/yr…
• 10 mm/yr >> uncertainties estimates• Long period fluctuations in the
continuous time series
• What noise model?

Velocity uncertaintiesUncertainty as a function of time:– Continuous GPS
measurements in blue– Campaign measurements in
redConclusion:– 2 years at least to reach
1mm/yr precision– 4 time longer for campaign
measurementsThis does not account for temporal correlation between errors.

Noise models• Langbein et al. (1993), Langbein
and Johnson (JGR 1997)• California (Parkfield, Long Valley,
Pearblossom areas):– 2-color electronic distance meter
measurements– Baseline length: 5-10 km– 15 years of observations
• Spectral analysis of time series– White noise + colored noise,
spectral index=2 (random walk)– Monument noise? Amplitude of
rwn correlated with:• Bedrock type• Type of monument

Noisemodels
• Correlated noise "hidden" in time series
• Synthetic time series:
– x0 = x-axis intersect– r = velocity (constant)– a and bk = magnitude of
the white and colored noise, respectively
– α and β = uncorrelated random variables
Johnson and Agnew (1995):
Rate uncertainty as a function of sampling frequency for 5 yearsof measurements:⇒ Little gain with continuous measurements!⇒ Emphasis on monuments to reduce rwn
)()()( 0 tbtartxtx βα κ+++=
Synthetic time series, 1 year of daily positions: b/a = rwn/wnrelative amplitude

Noise models
• Regional analysis: Zhang et al. (1997), GAMIT, double differences• Global analysis: Mao et al. (1997), GIPSY, point positioning• Spectral indices for GPS time series range from 0.74 to 1.02 (Mao et al., 1997)• Dependence in latitude: tropical stations have larger white noise ⇒ Troposphere?

Noise models, a case study
October 14, 1997 – April 8, 2000
north-south east-west vertical

Noise models, a case study
0
0,5
1
1,5
2
2,5
3
3,5
0 0,5 1 1,5 2
sigma b1 (WN+FN)
sigm
a b2
(WN+
RWN)
REGAL stationsIGS stations
0
0,2
0,4
0,6
0,8
1
1,2
1,4
0 1 2 3
WN+FN standard deviation (mm)
WN
only
sta
ndar
d de
viat
ion
(mm
)
REGAL stationsIGS stations
02468
1012
0 1 2 3 4White noise (mm)
Flic
ker n
oise
(mm
)
REGIGS s
Estimation of the parameters of a model combining white + colored noise:
⇒ Colored noise = flicker⇒ Amplitude ~ 5 mm⇒ 8 mm at Chatel and Modane: site environment?
(masks)⇒ White noise alone underestimate uncertainties by a
factor of 2

Noise models, a case study
0,1
1
10
100
0 1 2 3 4 5 6 7 8 9 10
Length of time series (years)
Sigm
a ra
te (m
m/y
r)
Sw =3, Sf=10, Srw =2Sw =2, Sf=5, Srw =0Sw =1.2, Sf=1.9, Srw =0
Mean values, estimated from the analysis of the REGAL time series
Maximum amplitude of white and flicker noise of the REGAL time series, plus 2 mm/√yr of random walk noise (Langbein and Johnson, 1997).
Minimum amplitude of white and flicker noise of the REGAL time series.
Empirical noise model combining white, flicker, and random walk noise (Mao et al., 1999):
T = time spang = # meas. per yearσ = magnitude of noisea,b = empirical constants
2/12
2
2
3
212
++≅
TTga
Tgrwfw
r bσσσσ
⇒ 1 mm/yr uncertainty can be reached in 1 year in the best case, in 10 years in the worse…

Noise sourcesPIN1-ROCH, 14 km PIN1-PIN2, 50 m
Bock et al., 2000
• Kinematic analysis of GPS baselines (50 m, 14 km, 37 km)• 1 sec. sampling rate• Epoch-by-epoch processing, no time-correlation introduced• No flicker noise on very short baseline => tropospheric origin?

Snow on antenna
• Effect of snow on GPS antenna radome: Jaldehag et al., 1996
• Elevation angle dependency strong when snow on radome: local refraction effects
ab c

Loading effects• Geophysical processes loading the earth's crust: oceanic water, continental water,
atmospheric air masses• Radial deformation of elastic earth:
- ρe = mean Earth density- h’n = load Love number (function of assumed rheology)- n = degree of spherical harmonic series- q(λ,ϕ) = surface load
• Atmospheric load = ground pressure field (measurements+interpolations, e.g. NCEP)
• Oceanic load = ocean tide models (+sat. altimetry)• Continental water (groundwater+snow) = global models for soil moisture and snow
∑∞
= +′
=0
),(123),(
nnn
eqn
hu λϕρλϕ

Continental water loading• Water cycle + climatological
model• Load = model storage output =
snow, ground water, soil water• 1°x1° grid• Load dominated by annual
signal• Vertical displacement range
caused by total stored water/snow (max-min, 1994 to 1998)
• On average: 9-15 mm over continents
• Max: monsoon and tropical continental areas
• Horizontal: 5 mm max.
VanDam et al., 2001
Seasonal peak-to-peak vertical displacements due to hydrological loading

Continental water loading
• Monthly averages of vertical component
• Atmospheric loading removed
• Annual signal, 2-3 cm• Hydrological loading does
not explain fully GPS height residuals
• Goal: validate models• Amplitude varies from year
to year
VanDam et al., 2001

Continental water loading
• Effect on secular trends for vertical displacement
• Small effect in most regions (<0.5 mm/yr)
• 20 years => < 0.3 mm/yr at all sites
VanDam et al., 2001

Precision and accuracy
-20
-15
-10
-5
0
5
10
15
20
-20
-15
-10
-5
0
5
10
15
20
-20 -15 -10 -5 0 5 10 15 20
-20 -15 -10 -5 0 5 10 15
EW, millimètres
NS,
milli
mèt
res
SJDV PLANIMETRIE
67%
95 %
Comparison of the position of site Grasse (right panel: NE, left panel: Up) obtained using 2 different geodetic techniques (GPS, SLR) and different processing strategies
The scatter of a series of measurements made using independent techniques is an indicator of the accuracy of the position estimate
Accuracy = external control
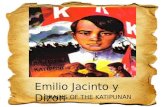
Daily positions (NE) for SJDV over a 6 month time period
The scatter of a series of measurements made using the same technique is an indicator of the precision of the position estimate
Precision = internal control

A short baseline
1.3 km long baseline continuously observed during 10 days
Processing of GPS phase data (on L1) with research software
Repeatability, horizontal components:
o 24 hr sessions: < 1 mmo 15 min sessions: ~ 5 mm
ACR0-BAT3 baseline, 1.37 km
012345
0 2 4 6 8 10
Session duration (hours)
Rep
eata
bilit
y(m
)m
)

Influence of baseline lengthPermanents GPS sites (IGS network), 1 to 2 years of continuous measurements
Repeatability (horizontal components):
⇒ Short baseline (36 km) = 2.0 mm ⇒ Medium baseline (160 km) = 2.3 mm⇒ Long baseline (870 km) = 7.3 mm⇒ Very long baseline (2300 km) = 10.0 mm


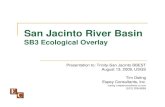
Influence of session durationLandslide in the French Alps (La Clapière, 50x106 m3)Reference site outside of the landslide + 3 sites on the landslide => baselines ~ 1 kmContinuous observations during 6 daysProcessing of the phase data (L1), using 24hr, 12hr, 6hr, 1hr sessions
⇒ Shorter sessions are affected by a high-frequency noise⇒ HF noise is correlated with PDOP variations and multipath (enhanced by topo + snow).
-0.025
-0.020
-0.015
-0.010
-0.005
0.000
0.005
0.010
0.015
0.020
0.025
0 24 48 72 96 120
CLP1-1h
CLP1-6h
CLP1-12h
CLP1-24h
-0.050
-0.040
-0.030
-0.020
-0.010
0.000
0.010
0.020
0.030
0.040
0 24 48 72 96 120
CLP1-1h
CLP1-6h
CLP1-12h
CLP1-24h
Varia
tions
en
mèt
res
LONGUEUR
DENIVELEEheight
length
Var
iatio
ns in
met
ers

Influence of session durationThree baselines observed continuously during 30 daysLength = 30, 60 and 260 kmSophisticated processing of the phase data (LC)
− 1, 6, and 24 hr sessions− Research software (GAMIT)− Precise IGS IGS, estimation of tropospheric parameters, etc…
00.0010.0020.0030.0040.0050.0060.0070.0080.0090.01
0 50 100 150 200 250 300
1h6h24h
Baseline length (km)
Rep
eata
bilit
y (m
) Sessionduration

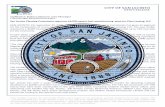
Influence of the processing strategy260 km long baseline observed continuously during 160 daysProcessing of the phase GPS data (LC) using 24 hour sessions with:
– A commercial software (GPPS), broadcast orbits, no tropospheric estimation, etc.– A research software (GAMIT), IGS precise orbits, tropospheric estimation, etc.
Longueur de la ligne de base SJDV-GINArouge : traitement GPPS, bleu : traitement GAMIT
-30.00
-25.00
-20.00
-15.00
-10.00
-5.00
0.00
5.00
10.00
15.00
20.00
35 55 75 95 115 135 155 175 195Jours de l'année, 1998
Diff
éren
ce à
la m
oyen
ne p
ondé
rée
en c
entim
ètre
s
Result:– GPPS:
wrms = 6 cm– GAMIT:
wrms = 3 mm– But mean length
differ by 0.6 mm only!
Day of Year, 1998
Diff
eren
ce to
the
wei
ghte
d m
ean
(cen
timet
ers)
SJDV-GINA baseline length (260 km)Red: GPPS Blue: GAMIT

The quest for millimeter precision… The recipeReceivers:
– Record phase and pseudorange data– Dual frequency
Antennas:– Design that minimizes multipath– Calibrated + phase diagram known
Measurements:– Long sessions (24 hours), repeated 2-3 times (=> power!)– Or continuous recording at permanent sites– Sampling rate 30 seconds, elevation cut-off 10°
Sites: stable, secure, and perennialReliable field operators!Post-processing of phase data:
– Ionosphere-free combination LC– Double differences (eliminate clocks) => need for at least 2 stations– Models:
– Antenna phase center variations– Tropospheric zenith delays (+ horizontal gradients)– Solid-Earth tides, ocean loading (+ atmospheric and hydrological loading…)– Orbit perturbations: solar radiation pressure, yaw
– A priori tables:– Earth orientation parameters for accurate conversions between inertial and Earth-fixed frames– Lunar and solar ephemerides (tidal effects)– Precise GPS orbits (from IGS)– Accurate terrestrial reference frame (ITRF)
⇒ Research software (GAMIT, BERNESE, GIPSY, etc.)