Lars ImslandProst årsmøte 20022002-06-111 Lars Imsland, ITK, NTNU Veileder: Bjarne Foss Robust...
20
Lars Imsland Prost årsmøte 2002 2002-06-11 1 Lars Imsland, ITK, NTNU Veileder: Bjarne Foss • Robust (output) feedback of piecewise affine difference inclusions • Olav Slupphaug, Bjarne • Nonlinear MPC and output feedback: A “separation principle” • Rolf Findeisen, Frank Allgøwer, Bjarne • Control of a class of positive systems • Gisle Otto Eikrem, Bjarne • A general result on stabilization • Application to oil production: Stabilization of gas- lifted oil wells
Transcript of Lars ImslandProst årsmøte 20022002-06-111 Lars Imsland, ITK, NTNU Veileder: Bjarne Foss Robust...

Lars Imsland Prost årsmøte 2002
2002-06-11 1
Lars Imsland, ITK, NTNU
Veileder: Bjarne Foss
• Robust (output) feedback of piecewise affine difference inclusions
• Olav Slupphaug, Bjarne
• Nonlinear MPC and output feedback: A “separation principle”
• Rolf Findeisen, Frank Allgøwer, Bjarne
• Control of a class of positive systems
• Gisle Otto Eikrem, Bjarne
• A general result on stabilization
• Application to oil production: Stabilization of gas-lifted oil wells

Lars Imsland Prost årsmøte 2002
2002-06-11 2
Piecewise affine systems
• Nonlinear, uncertain discrete time model
• Known equilibrium input
• Piecewise affine encapsulation

Lars Imsland Prost årsmøte 2002
2002-06-11 3
Problem statementFind controller that stabilizes the difference inclusion
by output feedback

Lars Imsland Prost årsmøte 2002
2002-06-11 4
Previous resultsWe have previously (Slupphaug, Imsland & Foss 2000) stated BMIs
which upon feasibility gives
• Piecewise affine state feedback
• Piecewise affine dynamic output feedback
• The dynamic output feedback BMIs proved to be very hard to solve

Lars Imsland Prost årsmøte 2002
2002-06-11 5
Output feedback control structure
Process
Observer model
PAObserver
Output Injection
PAState
feedback
• Nominal model
or
• Piecewise affine approximation

Lars Imsland Prost årsmøte 2002
2002-06-11 6
The synthesis inequalities• LMIs guaranteeing a decreasing Lyapunov function everywhere
• LMIs guaranteeing region of attraction and conformance to constraints
• Low dimensional BMI

Lars Imsland Prost årsmøte 2002
2002-06-11 7
Example• Nonlinear unstable system
• Partial state information (output)
• Uncertain system
• Constrained

Lars Imsland Prost årsmøte 2002
2002-06-11 8
Nonlinearities
“Real” nonlinearityp-a encapsulation
Observer nonlinearityp-a approximation

Lars Imsland Prost årsmøte 2002
2002-06-11 9
Controller and observer
0
-1
-2
1
2

Lars Imsland Prost årsmøte 2002
2002-06-1110
Simulation
• State “constraints”
• Lyapunov level set
•
• Phase trajectory

Lars Imsland Prost årsmøte 2002
2002-06-1111
MPC - prinsippPast Future
t t+1 t+M t+PInput horizon
Output horizon
Predicted outputs y(t+k|t)
Manipulated inputs u(t+k)
Regn ut en optimal pådragsekvens som minimaliserer reguleringsfeil samtidig som den tar hensyn til beskrankninger på pådrag og utganger.

Lars Imsland Prost årsmøte 2002
2002-06-1112
• Optimiser på tidspunkt t (nye målinger)
• Bruk det første optimale pådraget u(t)
• Gjenta optimalisering på tidspunkt t+1t t+1 t+M t+P
t+1 t+M+1 t+P+1
Past Future
Receding horizon
Fordel med “online optimization”:
TILBAKEKOBLING
Lars Imsland Prost årsmøte 2002
2002-06-1113
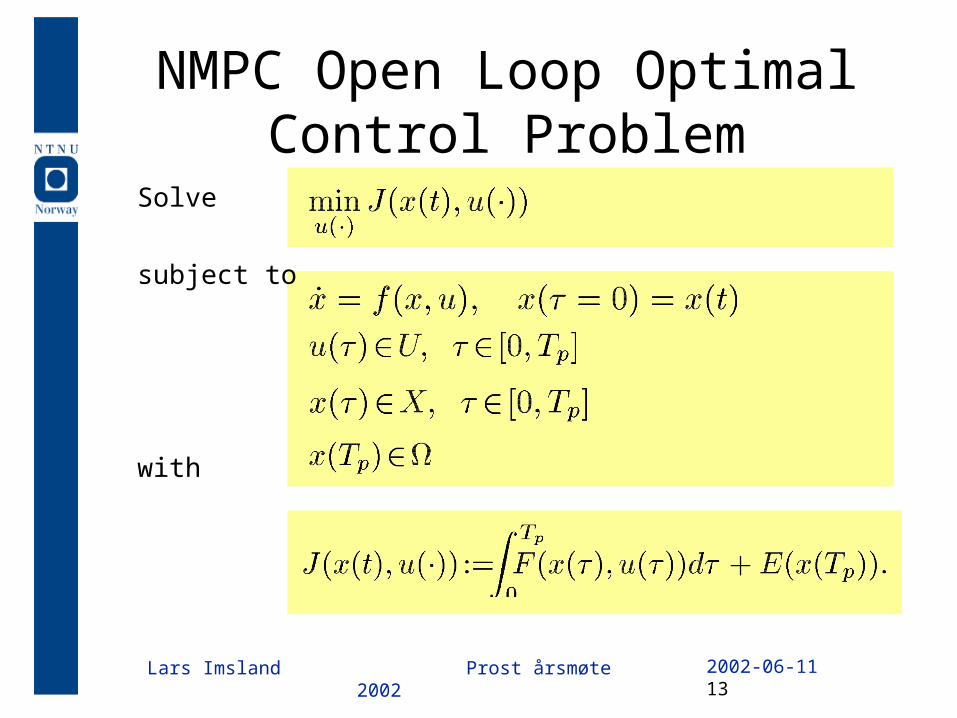
NMPC Open Loop Optimal Control Problem
Solve
subject to
with

Lars Imsland Prost årsmøte 2002
2002-06-1114
The output feedback problem• Problem: State information needed for prediction• Often only output measurements available
– need to estimate system states
• Many different observers for nonlinear systems– EKF, geometric, passivity based, extended Luenberger,
optimization based, MHE…
• Questions:– How to guarantee stability of closed-loop with observer?
– Which observer does facilitate solution?
Systemu y
x

Lars Imsland Prost årsmøte 2002
2002-06-1115
We have shown:• For fast enough observer, short enough sampling time
– Closed loop is “practically” stable– (Convergence to 0 under stronger conditions)– Recover state feedback region of attraction– Output feedback trajectories approach state feedback
trajectories
• Results hold for general nonlinear system with required observability conditions (“uniform observability”)

Lars Imsland Prost årsmøte 2002
2002-06-1116
Gas-lifted oil wells• Can have unstable production• Instability caused by mechanisms related to mass
– compressibility of gas– gravity dominated flow
• Simple model based on mass balances reproduce dynamic behavior
• Stabilization by simple controller based on physical properties

Lars Imsland Prost årsmøte 2002
2002-06-1117
A class of positive systems• Each state is measure of “mass” in a compartment - positive• Dynamics (typically: mass balances) are
– flow between compartments
– external inflow to compartments
– outflow from compartments
• Compartments can be divided into phases• Each phase has one input
– input either inflow or outflow to that phase
– input has saturation
• Controllability assumptions
...
Lars Imsland Prost årsmøte 2002
2002-06-1118
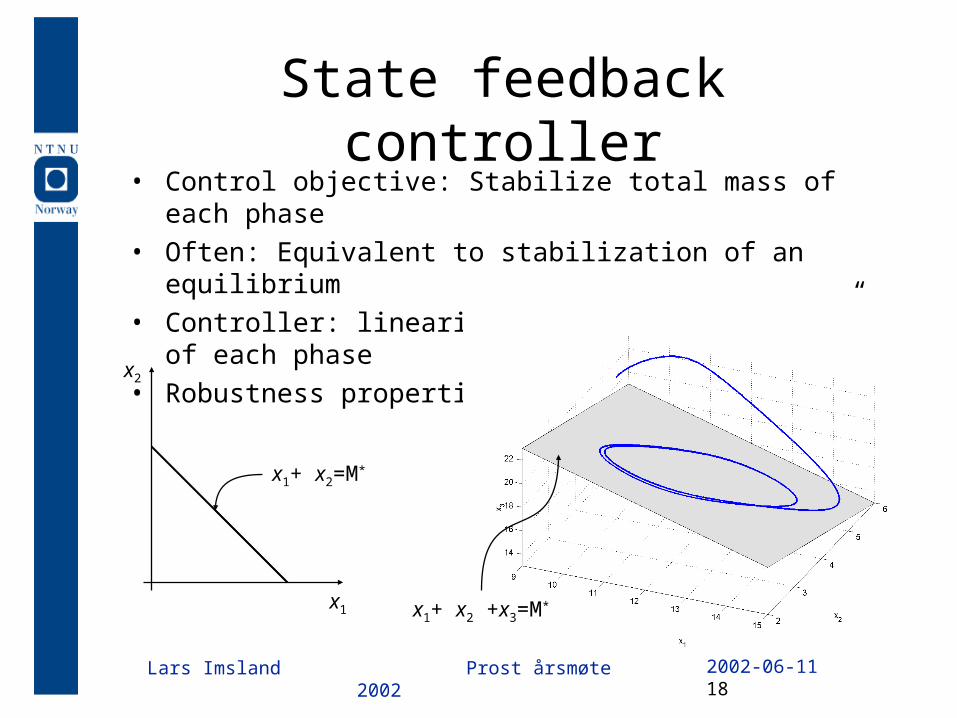
State feedback controller• Control objective: Stabilize total mass of each phase• Often: Equivalent to stabilization of an equilibrium• Controller: linearize “total mass dynamics” of each phase• Robustness properties
x1
x2
x1+ x2=M*
x1+ x2 +x3=M*

Lars Imsland Prost årsmøte 2002
2002-06-1119
Gas-lift• Control production choke and gas injection
choke to stabilize total mass of oil and gas• Stable total mass implies stable well production• Tuning knobs: setpoint for mass of oil and gas,
speed of controller• Steady state mass of oil decides well
performance (oil production) – to a certain extent
• Alternative: use only production choke– Also obtains stability
– Less flexibility

Lars Imsland Prost årsmøte 2002
2002-06-1120
Simulations on Olga