Laplace Transform - AAIT CIVIL ENG LECTUR NOTES Web viewLaplace Transform. The Laplace transform is...
34
Unit I Laplace Transform Laplace Transform The Laplace transform is an integral transform that transforms a real valued function f of some non-negative variable, say t into a function F(s) for all s for which the improper integral converges. Definition 1.1 Let f (t) be a given real valued function that is defined for all t ≥ 0. The function defined by for all s for which this improper integral converges is called the Laplace transform of f (t) and will be denoted by F (s) = L (f) = The operation which yields F (s) from a given real valued f (t) is also called the Laplace transform of f (t) while f (t) is called the inverse transform of F (s) and will be denoted by f (t) = Example 1 Let f (t) = 1 for t ≥ 0. Then find F (s). Solution Applying definition 1.1 we get: L (f) = L (1) = = = = for s > 0. Prepared by Tekleyohannes Negussie 83
Transcript of Laplace Transform - AAIT CIVIL ENG LECTUR NOTES Web viewLaplace Transform. The Laplace transform is...

Unit I Laplace Transform
Laplace TransformThe Laplace transform is an integral transform that transforms a real valued function f of some non-negative variable, say t into a function F(s) for all s for which the improper integral
converges.
Definition 1.1 Let f (t) be a given real valued function that is defined for all t ≥ 0. The function defined by
for all s for which this improper integral converges is called the Laplace transform of f (t) and will be denoted by
F (s) = L (f) =
The operation which yields F (s) from a given real valued f (t) is also called the Laplace transform of f (t) while f (t) is called the inverse transform of F (s) and will be denoted by f (t) = Example 1 Let f (t) = 1 for t ≥ 0. Then find F (s). Solution Applying definition 1.1 we get:
L (f) = L (1) = = = = for
s > 0.Therefore, L (1) = for s > 0.
Remark: Let f (t) = k for any scalar k. Then L (f) = for s > 0.
Example 2 Let . Then find F (s).
Solution L (f) = F (s) = = = .
Prepared by Tekleyohannes Negussie 83

Unit I Laplace Transform
Therefore, L (f) = for s > 0.
Example 3 Let f (t) = t for t ≥ 0. Then find F (s).Solution Applying definition 1.1 we get:
L (f) = F (s) =
Now applying integration by parts we get:
= = for s > 0.
Therefore, L (f) = for s > 0.
Example 4 Prove that for any natural number n, L ( ) = for t ≥ 0. Solution We need to proceed by applying the principle of mathematical induction on n i) For n = 1 it follows from example 3. ii) Assume that it holds true for n = k, i.e.
L ( ) = where t ≥ 0
iii) We need to show that it holds true for n = k + 1. i.e. L ( ) =
for t ≥ 0. Now by the definition of the Laplace transform
L ( ) =
Applying integration by parts we get: u = and = dt then = dt and v = .
Hence, =
= = , by our
assumption
Prepared by Tekleyohannes Negussie 84

Unit I Laplace Transform
= for s > 0. Thus, by the principle of mathematical induction it holds true for any natural number n. Therefore, L ( ) = for t ≥ 0.Example 5 Let f (t) = for t ≥ 0. Then find F (s).Solution Applying definition 1.1 we get:
L (f) = L ( ) = =
= = for s > ω.
Therefore, L ( ) = for s > ω.
Theorem 1.1 (linearity of the Laplace transform) The Laplace transform is a linear operation, that is for any real valued functions f (t) and g (t) whose Laplace transform exists and any scalars α and β L (α f + β g) = α L (f ) + β L ( g)
Proof By definition 1.1
L (α f + β g) =
= +
= h L (f) + k L ( g). Therefore, Laplace transform is a linear operation. Example 6 Find the Laplace transform of the hyperbolic functions f (t) = cosh t and g (t) = sinh t for t ≥ 0. Solution From theorem 1.1 and the result of example 2 we get:
L (f ) = L (cosh t) = +
Prepared by Tekleyohannes Negussie 85

Unit I Laplace Transform
=
= = for
s > .
Similarly, L (g) = L (sinh t) =
=
= = for
s > . Therefore, L (cosh t) = and L (sinh t) = for s > .Example 7 Find the Laplace transform of functions f (t) = cos t and g (t) = sin t for t ≥ 0. Solution From theorem 1.1 and Euler’s formula, where i = we get: = cos ω t + i sin ωt
L (f ) = L ( ) = = = On the other hand, L (cos ω t + i sin ωt) = L (cos ω t) + i L (sin ωt). Now equating the real and the imaginary parts we get: L (cos ω t ) = and L (sin ωt) = .
Therefore, L (cos ω t ) = and L (sin ωt) = for s > ω.We can also derive these by using definition 1. 1 and integration by parts with out going into the operations in complex numbers.
Example 8 Find L (f), where i) f (t) = 3 cos 2t + 2 sin t ii) f (t) = 4 cosh 5t 3 sinh 2t +
iii) f (t) = sin 2t cos 4tSolutions By the Linearity of the Laplace transform we have
i) L (f) = 3 L (cos 2t) + 2 L (sin t) = + .
Therefore, L [3 cos 2t + 2 sin t ] = + for s > 0.
Prepared by Tekleyohannes Negussie 86

Unit I Laplace Transform
ii) L (f) = 4 L (cosh 5t) 3 L (sinh 2t) + = + .
Therefore, L [4 cosh 5t 3 sinh 2t + ] = + for s > 0. iii) First observe that:
sin 2t cos 4t = = Then by the Linearity of the Laplace transform we get: L [sin 2t cos 4t] = =
.
Therefore, L [sin 2t cos 4t] = for s > 0.
Example 9 For any real valued functions f (t) and g (t) whose Laplace transform exists and any real numbers and , show that the inverse Laplace transform is linear. Solution From the linearity of the Laplace transform we get: L ( f (t) + g (t)) = L (f ) + L ( g ) = F (s ) + F ( s ) Hence, = f (t) + g (t)) =
. Therefore, the inverse Laplace transform is linear. Example 10 Find the inverse Laplace transforms of i) ii) iii) iv) Solutions i) From the linearity of the inverse Laplace transform we get: = = .
Therefore, = .
ii) Now = and .
Hence, = = .
Therefore, = .
iii) = + = cos t + 2 sin t.
Prepared by Tekleyohannes Negussie 87

Unit I Laplace Transform
Therefore, = cos t + 2 sin t.
iv) = + = cosh 3t + sinh
3t.
Therefore, = cosh 3t + sinh 3t.
Example 11 Find f (t) if i) F (s) = ii) F (s) = Solution By partial fraction reduction we get:
i) = + = A + B = 0 and 3 A = 9 A = 3 and B = 3 Thus, F (s) = = = 3 3 . Therefore, f (t) = 3 3 .
ii) = + =
A + B = 4 and 3 (A B) = 4 A = and B =
Thus, F (s) = + = = +
.
Therefore, f (t) = + .Example 12 For any ≥ 0, the Gamma function Γ () is defined by: Γ () =
Show that = for a > 0 and in particular Γ (n + 1) = n!, for any non- negative integer n. Solution Put x = st, so that dt = .
Thus, = = =
.
Prepared by Tekleyohannes Negussie 88

Unit I Laplace Transform
Therefore, = for a > 0. Further more, for any natural number n
Γ (n + 1) = = + n
= n = n Γ (n)
Thus, Γ (n + 1) = n Γ (n) = n (n 1) Γ (n 1) = n (n 1) (n 2) Γ (n 2) = . . . = n! Γ (1) = n!
We summarize the Laplace Transforms of some functions for future reference in the table below.
No
Function f (t)
Laplace transform
No Function f (t)
Laplace transform
1 1 62 k for k 7 cos t
3 t 8 sin t
4 forn = 0, 1,
2, . . .9 cosh t
5 for a ≥ 0 10 sinh t
Existence of Laplace TransformsBefore we define the theorem that guarantees the existence of Laplace transform, let us see the definition of piecewise continuity.
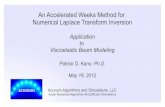
Definition 1.2 A function f (t) is piecewise continuous on a finite interval a ≤ t ≤ b if f (t) is defined on the interval and is such that the interval can be divided into finitely many subintervals , in
Prepared by Tekleyohannes Negussie 89

Unit I Laplace Transform
each of which f (t) is continuous and has finite limits as t approaches either endpoint of the subintervals from the interior.
By definition 1.2, it follows that finite jumps are the only discontinuities that a piecewise continuous function may have.
Theorem 1.2 (Existence of Laplace Transforms) Let f (t) be a real valued function that is piecewise continuous on every finite interval in [0, ) and satisfies the inequality ≤ for all t ≥ 0 and for some constants and M. Then there is a unique Laplace transform of f (t) for all s >
.
Proof Since f (t) is piecewise continuous, is integrable over any finite interval on the t-axis. Thus, for s > we have
=
= for s > .
Prepared by Tekleyohannes Negussie
x
y
Figure 1.1 a piecewise continuous function
90

Unit I Laplace Transform
Therefore, is finite, and hence it exists for s > . Example 13 Let f (t) = for t > 0. Then show that L [f] doesn’t exist.
Solution We prove this by showing that diverges. For some c > 0,
= +
To this end, let u = and = . Then du = and v = .
Hence, = +
.
But, =
= = ∞ for any c > 0.
Consequently, diverges.
Therefore, the Laplace transform of f (t) = for t > 0 doesn’t exist.
Remark: If the Laplace transform of a given real valued function exists, then it is unique. Conversely, if two functions have the same Laplace transform, then these functions are equal over any interval of positive length (i.e. they differ at various isolated points). Exercises 1.1 In exercises 1-8, find the Laplace transforms of the following functions by showing the details of your steps. (a, b, c, and δ are constants) . 1. f (t) = 2. f (t) = sin t cos t 3. f (t) = 4. f (t) =
5. f (t) = 6.
7. 8.
Prepared by Tekleyohannes Negussie 91

Unit I Laplace Transform
In exercises 9 – 13, given F (s) = L (f), find f (t) by showing the details of your steps. (, , and δ are constants) .
9. 10. 11. 12. 13.
In exercises 14 – 17, find the Laplace transforms of the following functions by showing the details of your steps. (a, b, c, and δ are constants) . 14. sinh t cos t 15. cosh t sin t 16. 17.
In exercises 18 – 20, find the inverse Laplace transforms of the following by showing the details of your steps.
18. 19. 20.
1.2 More on Transforms of Functions1.2.1 Laplace Transforms of Derivatives
Theorem 1.3 ( Laplace Transform of the Derivative of f (t)) Suppose that f (t) is a piecewise continuous real valued function for all t 0 and ≤ for some constants and M, and has a derivative that is piecewise continuous on every finite interval on [0, ). Then the Laplace transform of
exists when s , and = sL (f) f (0), for all s .
Proof Applying integration by parts we get:
Prepared by Tekleyohannes Negussie 92

Unit I Laplace Transform
= =
= Since , we have = But, = = 0, for .
This implies that = 0, and hence = 0. Consequently, Therefore, = sL (f) f (0), for all s .
Theorem 1.4 (Laplace Transforms of Higher order Derivatives) Let and its derivatives , , , be real valued continuous functions for all and satisfying ≤
for some and M, and k ≥ 0 and let the derivative be piecewise continuous on every finite interval contained in . Then the Laplace transform of exists when , and is given by =
Proof ( by the principle of mathematical induction on n) For n = 1, it holds by theorem 1.4 i.e . Assume that it holds true for n = k = Now we need to show that it holds true for n = k + 1 =
=
Prepared by Tekleyohannes Negussie 93

Unit I Laplace Transform
= Therefore, by the principle of mathematical induction = for any natural number n.Example 14 Let Then find Solution = , , = , , and Thus, = , and also, = . Equating these values we get: =
Therefore, = .
Remark: It can be shown by induction on n that
= for = 0, 1, 2, and s > 0. Example 15 Find Solution Let = Then = 1, = , = 0, = =
Now we have = and =
= .
Therefore, = Example 16 Find L [ ].Solution Let = . Then f (0) = 1, = , = 0 and = = = = = Now, since = we have = and =
= L[f] = .
Therefore, = for s > 0.
Example 17 Show that = .
Prepared by Tekleyohannes Negussie 94

Unit I Laplace Transform
Solution Let f (t) = . Then f (0) = 0, = , = 0 and = = = .Now, since = we have: = and =
= L[f] = .
Therefore, = for s > 0. Example 18 Find .Solution Let = . Then f (0) = 0, = , = 1 and = = Thus, = = =
= =
Therefore, = =
Similarly, it can be shown that
= and = .
1.2.2 Laplace Transforms of the Integral
Theorem 1.5 (Integration of f (t)) Let F (s) be the Laplace transform of the real valued function f (t). If f (t) is piecewise continuous and satisfies the inequality for some constants ω and M, then
Prepared by Tekleyohannes Negussie 95

Unit I Laplace Transform
for s > 0 and s > ω .
Proof Suppose that f (t) is piecewise continuous and for some constants ω and M . Then the integral
g (x) =
is continuous and for any positive number t
= for s >
ω . This shows that g (t) also satisfies an inequality of the form
for s > ω . Also, = f (t), except for points at which f (t) is discontinuous. Hence,
is piecewise continuous on each finite interval, and by theorem 1.4, L[f (t)] = = s L [g (t)] g (0) for s > . Hence, g (0) = 0, so that L [f (t)] = s L [g (t)] for s > 0 and s > .
Therefore, for s > 0 and s > .
Example 19 Let F (s) = . Find f (t). Solution From the result of example 7 we get
=
Again, using theorem 1.7 we have
= =
Therefore, f (t) = .
Example 20 Let F (s) = . Find f (t). Solution From the result of example 19 we get
= =
Prepared by Tekleyohannes Negussie 96

Unit I Laplace Transform
Therefore, f (t) = .
1.2.3 S-shifting, Unit step functions and t-shiftingThe first shifting theoremIf we replace s by s a, in the definition of the Laplace transform we get the following
important result.
Theorem 1.6 (First shifting theorem) If f (t) has the transform F (s) where s k, then
has the transform F (s a) where s a k. Symbolically, L { } = F (s a) or =
Proof F (s a) can be obtained by replacing s by s a in definition 1.1 as follows:
F (s a) = = = L {
}. Now if F (s) exists for s greater than some k, then our integral exists for s a k.Example 21 Find the Laplace transform of f (t) = cos t and g (t) = sin t for t ≥ 0. Solution Applying theorem 1.6 on the result of example 5 we get: L (f ) = L ( cos t) = and L (g ) = L ( sin t) =
Unit step functions and t-shifting Theorem
Prepared by Tekleyohannes Negussie 97

Unit I Laplace Transform
The unit step function defined below is a “typical engineering function” made to measure for engineering applications, which often involve function that are “off” and “on”.
Definition 1.3 The function u defined by
is called the unit step function.
The unit step function is also called the Heaviside function.Example 22 Let f (t) = 5 sin t. Then f (t) u(t 2) represents a switch off for 0 < t <2 and switch on for t > 2 while f (t 2) u(t 2) represents a shift to the right by 2 units.
Example 23 Show that L [u (t a)] = for s > 0.Solution Applying definition 1.1 we get:
L [u (t a)] = = =
= .
Therefore, L [u (t a)] = for s > 0.
Prepared by Tekleyohannes Negussie
t
f(t)
t
f (t)
1 1
1
f (t) = u (t 1)
1
f (t) = t [u (t) u (t 1)] + u (t 1)
98

Unit I Laplace Transform
Theorem 1.7 (The second shifting theorem, t-shifting theorem) If f (t) has the Laplace transform F (s), then the shifted function = f (t a) u (t a) =
has the Laplace transform . That is L[f (t a) u (t a)] = .
Proof From the definition of the Laplace transform we have
= =
Substituting + a = t in the integral we get:
= =
= L[f (t a) u (t a)]. Therefore, = L[f (t a) u (t a)].
Example 24 Find L [f], where
Solution We write f (t) in terms of unit step functions. For 0 < t < , we take 2 u (t). For < t < 2 we want 0, so we must subtract the step function 2 u (t ) and for t > 2 we need to add 2 u (t ) sin t. Hence, f (t) = 2 u (t) 2 u (t ) 2 u (t 2) sin t. f (t) = 2 u (t) 2 u (t ) 2 u (t 2) sin (t 2). (since sine is a periodic function with period 2)
Therefore, L [f] = + .
Example 25 Find the inverse Laplace transform of
Prepared by Tekleyohannes Negussie 99

Unit I Laplace Transform
F (s) = + .
Solution Without the exponential functions the four terms of F (s) would have the inverses 2t, 2t, 4 and cos t. Hence, by theorem 1.7 f (t) = 2t 2(t 2) u(t 2) 4 u(t 2) + u (t ) cos (t )= 2t 2t u (t 2) u (t )cos t.
Therefore, .
1.2.3 Laplace Transforms of Periodic Functions
Proof By definition 1.1
L [f] =
= (put t = t + np since f (t) is periodic
with period p)
= , because it is a geometric series.
Therefore, L [f] = .
Example 26 Find the Laplace transform of the saw-tooth wave given by
where 0 ≤ t ≤ p and f (t + p) = f (t) for t ≥ 0. Solution From theorem 1.8 we have
Prepared by Tekleyohannes Negussie
Theorem 1.8 (Laplace Transforms of Periodic Functions) The Laplace transform of a piecewise continuous function f (t) with period p is
L [f] =
100

Unit I Laplace Transform
L [f] = = =
Therefore, = .1.3 Differential Equations1.3.1 Ordinary Linear Differential EquationsWe shall now discuss how the Laplace transform method solves differential equations. We began with an initial value problem , y (0) = and (1)with constants a and b. Here r (t) is the input (driving force) applied to the mechanical system and y (t) is the output (response of the system). In Laplace method we do three steps:Step 1 We transfer (1) by means of theorem 1.3 and 1.4, writing Y = L (y) and R = L (r). This gives (2) This is called the subsidiary equation. Collecting Y terms we have (3)
Step II We solve the subsidiary equation algebraically for Y. Division by and use
of the so- called the transfer function
(4) gives the solution (5) If y (0) = = 0, then this implies Y = QR; thus Q is the quotient
Prepared by Tekleyohannes Negussie 101

Unit I Laplace Transform
= (6) and this explains the name of Q. Note that: Q depends only on a and b, but neither on r (t) nor on the initial conditions. Step III We reduce (5) to a sum of terms whose inverse can be found from the table, so that the solution y (t) = . Example 27 (initial value problem) Solve , y (0) = 1 and = 1 Solution The subsidiary equation becomes
Thus,
=
Now , and .
Therefore, y (t) = t + sinh t. Example 28 (initial value problem) Solve , y (0) = 1 and = 1 Solution The subsidiary equation becomes
Thus,
Now , .
Therefore, y (t) = .
Prepared by Tekleyohannes Negussie 102

Unit I Laplace Transform
Example 29 (initial value problem) Solve , y (0) = 1 and = 1 Solution The subsidiary equation becomes
Thus,
Now A + B = 1 and 2A + B = 4 A = 3 and B = 2 = + + + A = 3, B = 2, C = 4 and D = 1 and = + + A = 0.5, B = 0.5 and C = 1. Hence,
= + +
Now , , = and =
.
Therefore, y (t) = 3 + 2t + .Example 30 (initial value problem) Solve , y (0) = 0 and = 1. Solution The subsidiary equation becomes
Thus,
Now = +
Prepared by Tekleyohannes Negussie 103

Unit I Laplace Transform
A = C = 0, B = and D = .
Hence, Y = =
Now = and =
Therefore, y (t) = .Example 31 (initial value problem) Solve , y (0) = 0 and = 1. Solution The subsidiary equation becomes
Thus,
Now = +
A = 4, B = 6, C = 4 and D = 2.
Hence, Y =
Now = and = Therefore, y (t) = .
Example 32 (initial value problem) Solve , y (0) = 2 and = 0. Solution The subsidiary equation becomes
Thus,
Now = +
Prepared by Tekleyohannes Negussie 104

Unit I Laplace Transform
B = D = 0, A = and B = .
Hence, Y = =
Now = and =
Therefore, y (t) = .
Example 33 (shifted data problem)
Solve , and .
Solution set t = , so that .
Now the subsidiary equation in terms of the new variable becomes
Now = and =
Hence, + +
= + +
Therefore, ( ) = + 2 + . Now in terms of the original variable t we get: y(t) = 2t + cos t sin t.Therefore, y(t) = 2t + cos t sin t.1.3.2 Systems of Linear Differential Equations
Example 34 Solve , , and . Solution The subsidiary equations become
Prepared by Tekleyohannes Negussie 105

Unit I Laplace Transform
and and Solving for and algebraically we get and
and
and
Now, = cos t and = sin t
Therefore, and .Example 35 Solve , , and . Solution The subsidiary equations become and and Solving for and algebraically we get and
and
and
Now .
Hence, .
Now, = cosh t and = sinh t
Therefore, and .
Example 36 Solve , , , ,
and . Solution The subsidiary equations become
Prepared by Tekleyohannes Negussie 106

Unit I Laplace Transform
and
and
Solving for and algebraically we get
and
and
Now
Hence, and
Therefore, and . Example 37 Solve , , , ,
and . Solution The subsidiary equations become and
and Solving for and algebraically we get and
and
Therefore, and .
Prepared by Tekleyohannes Negussie 107