LabSiD Tech. People - cim.mcgill.cafont/downloads/Barcelona_Master... · 1 Laboratori de Simulació...
15
1 Laboratori de Simulació Dinàmica LabSiD Tech. People Carlos Toni Javi PhD Students Gonzalo Verónica Nuria Gerard Xavi Pau Undergrad Students Kirian Technical workers Adrián Àngels Marc Topics: Deformations • Cloth Simulation • Facial Animation • Medical Applications: – Haptic Heart Model – Inguinal Hernia – Gait Analysis • Fluid Simulation Projects • GPU - Cloth (Javi) Projects • Facial Animation: (Veronica) Projects • Fluid Animation (Nuria)
Transcript of LabSiD Tech. People - cim.mcgill.cafont/downloads/Barcelona_Master... · 1 Laboratori de Simulació...

1
Laboratori de Simulació Dinàmica
LabSiD Tech. People
Carlos
Toni
Javi
PhDStudents
GonzaloVerónica Nuria Gerard Xavi
Pau
UndergradStudents
Kirian
Technicalworkers
AdriánÀngels Marc
Topics: Deformations
• Cloth Simulation• Facial Animation• Medical Applications:
– Haptic Heart Model
– Inguinal Hernia
– Gait Analysis
• Fluid Simulation
Projects
• GPU - Cloth (Javi)
Projects
• Facial Animation: (Veronica)
Projects
• Fluid Animation (Nuria)

2
Projects
• Haptic Deformable Models (Gonzalo)
Projects
• Inguinal Hernia (Gerard / Javi / Carlos)
Projects
• Gait Analysis (Javi / Xavi)
Captura del Moviment:Tecnologia i Aplicacions
Seminaris Interdisciplinaris de Recerca
Captura del moviment
• En què consisteix? Enregistrar els paràmetres que descriuen el moviment d’un objecte: posició i orientació, angles, deformacions, etc.
• Per què ens cal? No és fàcil reproduir els moviments reals:caminar, gestos subtils, etc.
Captura del moviment• Reproduir l’Animació:
3
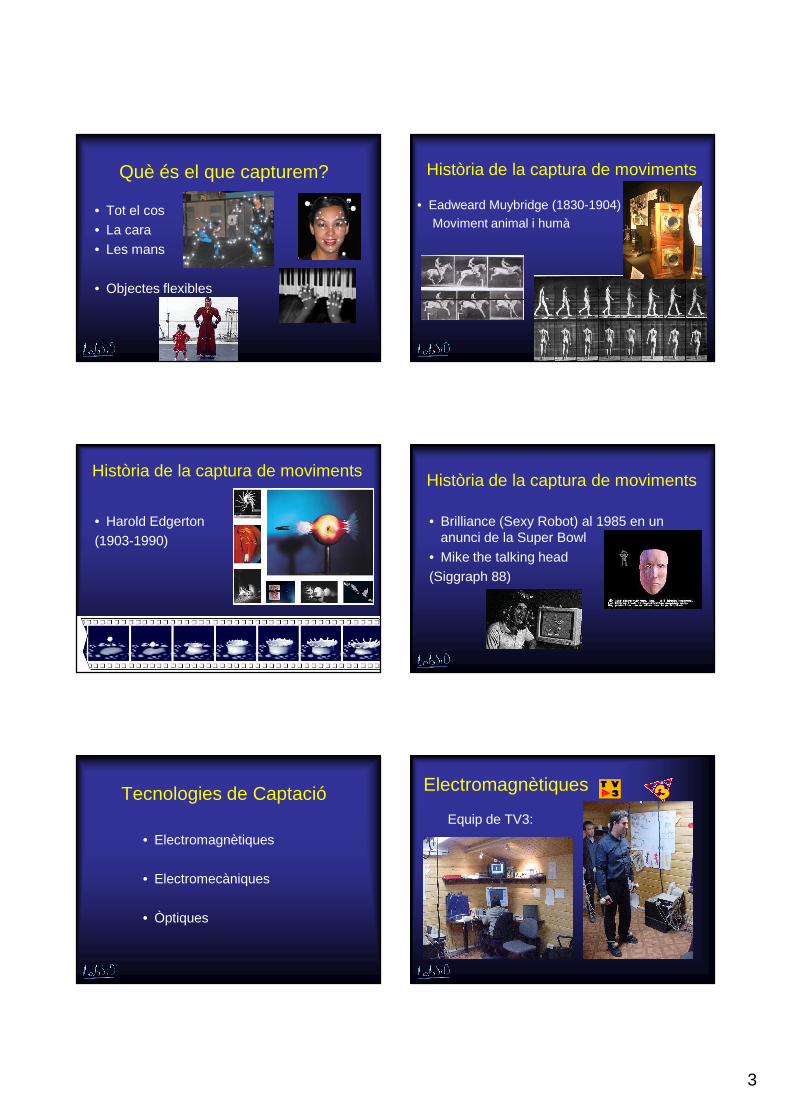
Què és el que capturem?
• Tot el cos• La cara• Les mans
• Objectes flexibles
Història de la captura de moviments
• Eadweard Muybridge (1830-1904)Moviment animal i humà
• Harold Edgerton (1903-1990)
Història de la captura de moviments
• Brilliance (Sexy Robot) al 1985 en un anunci de la Super Bowl
• Mike the talking head (Siggraph 88)
Història de la captura de moviments
Tecnologies de Captació
• Electromagnètiques
• Electromecàniques
• Òptiques
Equip de TV3:
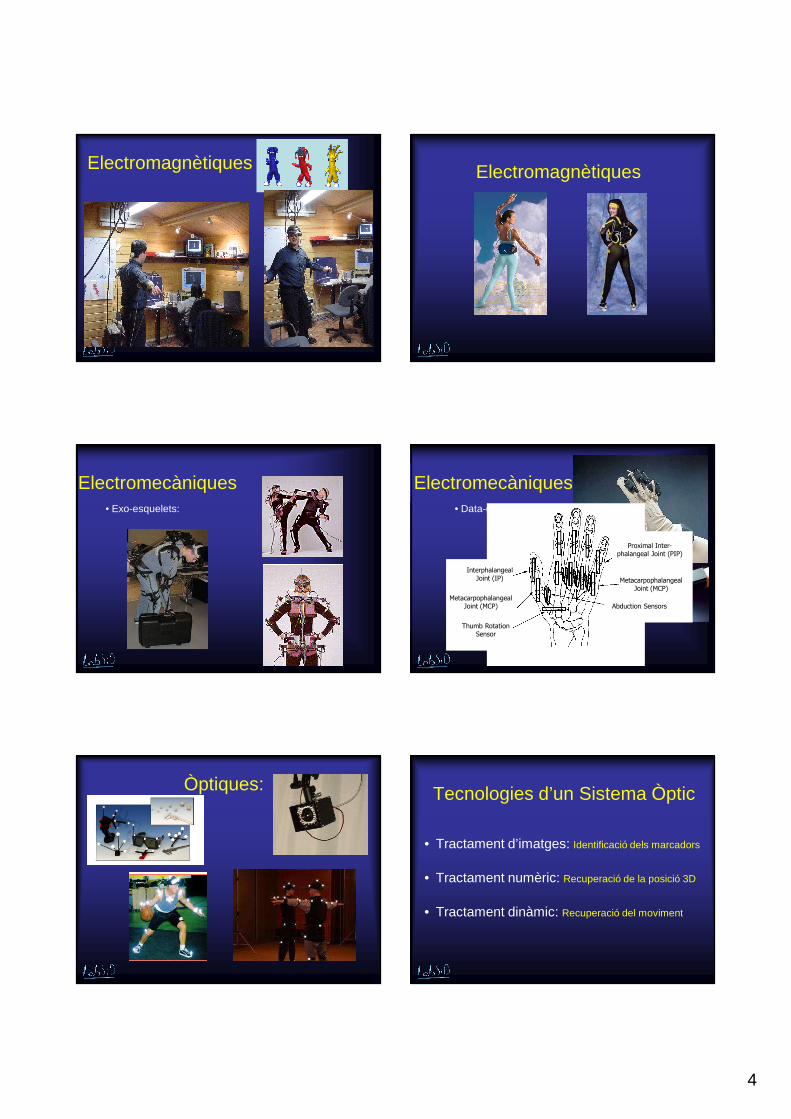
Electromagnètiques
4
Electromagnètiques Electromagnètiques
• Exo-esquelets:
Electromecàniques• Data-globe:
Interphalangeal
Joint (IP)
Metacarpophalangeal
Joint (MCP)
Thumb Rotation
Sensor
Proximal Inter-
phalangeal Joint (PIP)
Metacarpophalangeal
Joint (MCP)
Abduction Sensors
Electromecàniques
Òptiques: Tecnologies d’un Sistema Òptic
• Tractament d’imatges: Identificació dels marcadors
• Tractament numèric: Recuperació de la posició 3D
• Tractament dinàmic: Recuperació del moviment

5
Identificació dels marcadors
• Background substraction
• Detecció de Contorns
• Nivell de Intensitat
Com es forma una imatge?
• Model de Projecció Pin-Hole
Com es forma una imatge?
• Pla de la imatge:
Com es forma una imatge?
• De coordenades del punt (x,y,z) a coordenades de la imatge (Xcam, Ycam)
·
·
cam
cam
xx f
zy
y fz
=
=
Imatge en 3D
• Sistemes de Coordenades

6
Calibració del Sistema
• Paràmetres extrínsecs:– Determinació de la posició i orientació de la
càmera.
• Paràmetres intrínsecs:– Distorsió de la imatge
per efectes òptics.
Paràmetres Intrínsecs• Distorsió per les lents
• Píxel real
Recuperació del 3D
·
·
cam
cam
xx f
zy
y fz
=
=
• Problema de la profunditat
???z
Recuperació del 3D
• Geometria epipolar
‘Tracking’ d’un marcador
• Seguiment al llarg del temps de captura d’un determinat punt en l’espai.
Aplicacions
• Biomecànica:– Clínica: reabilitació, avaluació de lesions, etc.
– Esports: entrenament, millora del moviment
– Ergonomia: detecció de moviments crítics
• Animació: – Videojocs, cinema, publicitat.

7
Aplicació Biomecànica
• Real-time Motion Capture and Analysis
• Cámaras•• Subject Unit•
• Estación base•
• PC•• DLK 900•• Unit base•
Hardware
Modelos Biomecánicos •
eBiom
eBiom: Ajuda a l’usuari
• Triar el model
• Col·locació de marcadors
• Animació del moviment
Estudi del Moviment
Sagital FrontalTransvers
Estudi del Moviment
• Model Biomecànic– Flexo-extensió del colze
Sagital
1
2
3a
Càlcul de l’angle que forma l’articulació.
Rang d’angles• Càlcul dels angles al llarg de tot el temps
de captura.
a(t)
m1(t)
m2(t)
m3(t)
Tiempo
Velocitat angularVariació de l’angle al llarg del temps
( ) ( )( )
a t a t tt
tω ∆
∆− −=
2
( ) ( )( )
a t t a t tt
tω ∆ ∆
∆+ − −=
Ángulo
Derivada posterior
Derivada centrada

8
Tècniques de Captació:
• Fotogrametria 3D
Tècniques de Captació:
• Electromiografia
Tècniques de Captació:
• Dinamometria
Tècniques de Captació:
• Goniometria
Tècniques de Captació:• Plantilles de Pressió
Tècniques de Captació:
• Plataformes de Força

9
Captures Clíniques
• Video
Moviment
• Unitat d’Anàlisi de la Marxa (UAM)
Aplicacions: Animació• Format de dades: Biovision
– Estructura Jeràrquica
LA RA RLLLH
CHEST
L-HIPR-HIP
ROOT Root
Tipus d’articulacions
1-DOF
2-DOF
3-DOF
Sistema de Coordenades• Models d’articulacions:
– 1-2-3 DOF
Correció de dades
• Soroll a les Dades: Filtrat de trajectories

11/12/2010
1
Xavier Lligadas, Antonio Susin
Universitat Politècnica de Catalunya
Motivation
� Create characters capable to interact realistically with the
environment.
Environment
� Ruled by classic dynamics.
Environment
� Ruled by classic dynamics.
� Rigid body dynamics.
Environment
� Ruled by classic dynamics.
� Rigid body dynamics.
� Different terrain properties and slopes.
Traditional character animation
� Key-frame Animation.

11/12/2010
2
Traditional character animation
� Key-frame Animation.
� Motion Capture.
Traditional character animation
� Interpolation
� Running.
� Slope walking.
� Jumping
Traditional character animation
� Interpolation
� Inverse Kinematics
� Reaching.
� Slope positioning.
Traditional character animation
� Interpolation
� Inverse Kinematics
� Reaching.
� Slope positioning.
Environment-Character
� Traditional character animation does not scale well in physically driven environments.
� Limited number of animations for an infinite number of possible interactions.
� Some techniques can help to alleviate the problem.
� Interpolation.
� Inverse kinematics.
Environment-Character
� Traditional character animation does not scale well in physically driven environments.
� Limited number of animations for an infinite number of possible interactions.
� Some techniques can help to alleviate the problem.
� But variations are still boring…
11/12/2010
3
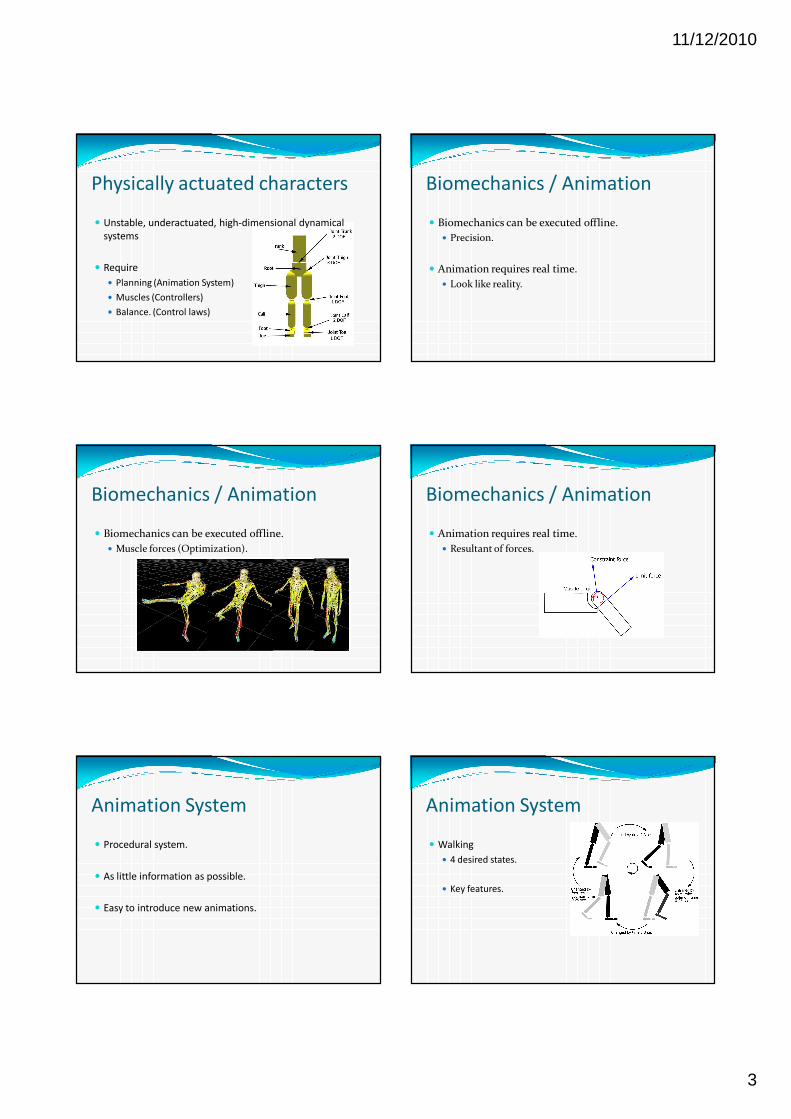
Physically actuated characters
� Unstable, underactuated, high-dimensional dynamical
systems
� Require
� Planning (Animation System)
� Muscles (Controllers)
� Balance. (Control laws)
Biomechanics / Animation
� Biomechanics can be executed offline.
� Precision.
� Animation requires real time.
� Look like reality.
Biomechanics / Animation
� Biomechanics can be executed offline.
� Muscle forces (Optimization).
Biomechanics / Animation
� Animation requires real time.
� Resultant of forces.
Animation System
� Procedural system.
� As little information as possible.
� Easy to introduce new animations.
Animation System
� Walking
� 4 desired states.
� Key features.

11/12/2010
4
Controllers
� They must generate the
force in charge to drive the
character from its current
state to the next desired
state.
Proportional derivative controllers
� The most widely used controllers
� Easy to create.
� Fast execution.
� Difficult to stabilize and parameterized.
( ).
θκθθκτ ddP −−=
?=Pκ?=dκ
Velocity based controllers
� Parameterization
� Maximum torque that a controller is able to generate.
� Experimentation…
� Databases…
� Controllers reaction time.
� Experimentation…
� Bibliography…
maxτ
rt
Velocity based controllers� Torque calculation
� Step 1: Calculate desired velocities.
Velocity based controllers� Torque calculation
� Step 2: Calculate torques.
ttr
inc ∆= maxττ
-Impose torque continuity.
Velocity based controllers� Torque calculation
� Step 3: Forward dynamics.

11/12/2010
5
Control laws
� Center of mass projection (cCM) inside base polygon.
� If cCM lays outside the
tolerance polygon, we use
inverse kinematics to
change the desired state
and increase the base
polygon.
Control laws
� Center of mass projection (cCM) inside base polygon.
� If cCM lays outside the
tolerance polygon, we use
inverse kinematics to
change the desired state
and increase the base
polygon.
Control laws
� Center of mass projection (cCM) inside base polygon.
� If cCM lays outside the
tolerance polygon, we use
inverse kinematics to
change the desired state
and increase the base
polygon.
Control laws
� Center of mass projection (cCM) inside base polygon.
� If cCM lays outside the
tolerance polygon, we use
inverse kinematics to
change the desired state
and increase the base
polygon.
( )lengthFoot
bPcCMd 2
3
4 −−=
Control laws
� Additional foot-ground controller.
� Zero desired velocity.
� Fictional increase of the base polygon.
� Stabilization of the system.
� Introduction of artificial forces.
Additional controller
Results
� Walking and reacting to pushes.

11/12/2010
6
Results
� Walking in a constrained environment without requiring optimization or pre-process.
Results
Current Work
� Zero Moment Point Calculation.
� Inverted Pendulum model.
� New Control Laws.
� LCP Problems.












![Ecologia de les llengües. Medi, contactes i dinàmica sociolingüística [Ecology of Languages. Sociolinguistic environment, contact, and dynamics]](https://static.fdocuments.in/doc/165x107/557205c9497959fc0b8b7bc9/ecologia-de-les-llenguees-medi-contactes-i-dinamica-sociolingueistica-ecology-of-languages-sociolinguistic-environment-contact-and-dynamics.jpg)