
- Laboratoire d'InfoRmatique en Image et Systèmes d'information LIRIS UMR 5205 CNRS/INSA.
date post
19-Dec-2015Category
view
216download
0
Laboratoire d'InfoRmatique en Images et Systèmes d'information
UMR 5205
18/04/23
Vasile-Marian Scuturici and Dejene EjiguLIRIS-UMR 5205 CNRS, INSA de Lyon
Positioning Support in Pervasive Environments
Presented at ICPS'06 IEEE International Conference on Pervasive Services 2006
26-29 June 2006, Lyon, France

04/18/23
Topics
BackgroundPervasive computingPositioning needsRelated works
BackgroundPervasive computingPositioning needsRelated works
Model for indoor location detection Learning phase Prediction Phase
Model for indoor location detection Learning phase Prediction Phase
Experimental results and usage scenarioExperimental results and usage scenario
Conclusions and future workConclusions and future work

04/18/23
What is pervasive computing?
Typical view of a pervasive environment crowded with varieties of ubiquitous devices surrounding a user.
A computing trend towards using increasingly ubiquitous and
interconnected computing devices in the environment.
A computing trend towards using increasingly ubiquitous and
interconnected computing devices in the environment.
Enhanced by a convergence of advanced electronic, wireless
technologies, and the Internet.
Enhanced by a convergence of advanced electronic, wireless
technologies, and the Internet.
Devices involved are very tiny, sometimes invisible, either mobile or
embedded in almost any type of object imaginable.
Devices involved are very tiny, sometimes invisible, either mobile or
embedded in almost any type of object imaginable.

04/18/23
Positioning needs …PSAQL in our platform PerSE to express user intensions:USE sunrise.ppt ON BASE notebook WITH SERVICE projector
PSAQL in our platform PerSE to express user intensions:USE sunrise.ppt ON BASE notebook WITH SERVICE projector
To ensure neighbourhood constraint, the query can be rewritten as:USE sunrise.ppt ON BASE notebook WITH SERVICE projector IN NEIGHBOURHOOD
To ensure neighbourhood constraint, the query can be rewritten as:USE sunrise.ppt ON BASE notebook WITH SERVICE projector IN NEIGHBOURHOOD
Here the user assumes that the video projector is situated in the same visually and physically accessible space
Here the user assumes that the video projector is situated in the same visually and physically accessible space

04/18/23
Positioning needs …
The question is: How can the NEIGHBOURHOOD space be identified in PerSE?
The question is: How can the NEIGHBOURHOOD space be identified in PerSE?
Neighbourhood relation here is expressed not by the physical proximity like in coordinate positioning system but by perception of the presence in the same bounded space/room.
Neighbourhood relation here is expressed not by the physical proximity like in coordinate positioning system but by perception of the presence in the same bounded space/room.

04/18/23
Related works
Among localization and distance measuring methods are:Global Positioning Systems Radio Frequency (RF) delay measurementAssociation to nearest Access Point Received RF signal strength
Among localization and distance measuring methods are:Global Positioning Systems Radio Frequency (RF) delay measurementAssociation to nearest Access Point Received RF signal strength
GPS systems are good for outdoor positioning servicesThe others are based on triangulation or TIX methods and they assume prior knowledge of position of the access point infrastructure
GPS systems are good for outdoor positioning servicesThe others are based on triangulation or TIX methods and they assume prior knowledge of position of the access point infrastructure
04/18/23
Topics
BackgroundPervasive computingpositioning needsRelated works
BackgroundPervasive computingpositioning needsRelated works
Model for indoor location detection Learning phase Prediction Phase
Model for indoor location detection Learning phase Prediction Phase
Experimental results and usage scenarioExperimental results and usage scenario
Conclusions and future workConclusions and future work

04/18/23
Modeling indoor positioning
Learning phase: data is collected, classified to create the prediction modelPrediction phase: Location prediction based on the real-time data values
Learning phase: data is collected, classified to create the prediction modelPrediction phase: Location prediction based on the real-time data values
Architecture of our learning and prediction model
Does not assume prior knowledge of position of APsBased on database methods
Does not assume prior knowledge of position of APsBased on database methods
Learning phase (Offline)
Signal
Tracking
Prediction phase (Real time)
Distributed on Capable Peers
Context –Aware
Service
Data Calibration and
Treatment
Data Mining (Decision Tree)
Signal Tracking
Data Calibration
Prediction
Calibration and Treatment Rules
Prediction Rules (PMML Format)
(eg. PDA_David locatedIn Common_Room)

04/18/23
Learning phase …
340 342
337335
326 330 332 334 336 338
333
328
Demars
Ou-halimaBoumedieneSecrétariat
EDIISBrunie
Varet
SecrétariatFormationcontinue
Abbas
Jouve
Directionformationcontinue
Salle TD Salle TD
Salle TD Amphi FCSalle TD Salle TP - FCSalle TD
Coquard
Chaari
SecrétariatEDIIS
Lebel
329 331
Passerelle
311
30
WC
Asc
ense
ur
315 317325
316314
Benel
Berhe
Seitz
Besson
Rigotti
Leschi Robardet
Masson
Piersno
Ahmed-Ouamer
Saoula Samir
Arias
Servigne
Miquel
Laforest
Tchounikine
SécrétariatDirectionSalle de Réunion
Taher AhmedArara Keita
Jossan Pozzoli
FloryChatti
Salledétente
Egyed
Réseau
Andrianarisoa
Balhoul
Berkane OularbiKouloumdjian
Coulondre Calabretto Alvarez
Rifaieh Coquil
Pivano
301305 307 309 313 319 321 323
324322320
Amghar
318308306304302
Tribollet
Réseau
Badr
Dejene
PechTaqafi
Boulicaut
Ridh HadjM’tir
AccaryManzi
Ouziri
Verdier
Cardenas
Servin
Prensa
Hunor
Meger
Leleu
Suela Bohé
Passerelle
201 203 205 207 209
202 204
WC
Asce
nseu
r
211 213
210208
206
215
Salle Serveurs
Détente Elèves
AEDI TP 5IF1 TP PC4 Réseau
TP PC0TP PC1TP PC2 TP 5IF2TP PC3
222 224
227225
B501225A
N
L.Frécon
217
219
221 223
220
212
214 216 218
PRISMA
PRISMA
D. Magnin
G.Neubert
Y.Ouzrout
PRISMA PRISMA
M. Martinez
Salle réunion étudiants
J.FAVREL
M.MATARsecretariat
TP PC5Atelier
Salle TD
I. El Kalkali
P.A. Millet
Topology of the floors used in our experiments
A person holding a PDA moves around the rooms in the building including meeting halls, offices, common rooms, printing rooms and corridors
A person holding a PDA moves around the rooms in the building including meeting halls, offices, common rooms, printing rooms and corridorsOur WiFi-Spotter and management program is used to track, process and store received signal strength from all n visible access points at each tracking location.
Our WiFi-Spotter and management program is used to track, process and store received signal strength from all n visible access points at each tracking location.

04/18/23
… Learning phase …
For each tracking point i in room k, we have a vector with the signal strength values from the APs and a label corresponding to the literal name of the place (room) where the point is situated.
For each tracking point i in room k, we have a vector with the signal strength values from the APs and a label corresponding to the literal name of the place (room) where the point is situated.
Room 00:06:5A:40:0D:C6 00:06:5A:40:0D:D7 00:06:5A:10:0D:C6 00:06:5A:10:0D:D7
501.317 -60 -60 -60 -57
501.317 -60 -60 -60 -57
501.317 -68 -63 -59 -65
501.319 -60 -62 -64 -100
501.319 -57 -57 -60 -100
501.319 -57 -66 -57 -100
Sample attribute-value table showing tracked values.
,....2,1,,
2,
1, ,,...,,
iiknikikik roomapapap

04/18/23
… Learning phase
Signal strength values are classified for pattern identification using data mining tool (MCubiX implementation of the decision tree algorithm).
Signal strength values are classified for pattern identification using data mining tool (MCubiX implementation of the decision tree algorithm).
The result from this process is our working model that can later be used for real-time location detection.
The result from this process is our working model that can later be used for real-time location detection.
The model is represented in the predictive model mark-up language – PMML - format.
The model is represented in the predictive model mark-up language – PMML - format.

04/18/23
Prediction phaseThe two important input parameters for prediction are:
Decision rules obtained from the prediction modelReal-time signal strength values collected at a specific
location
The two important input parameters for prediction are:
Decision rules obtained from the prediction modelReal-time signal strength values collected at a specific
location
If Value is in this region Predict
Room-501_319 with 90% Accuracy
If Value is in this region Predict
Room-501_315 with 88% Accuracy
Sample prediction model
using two APs and three rooms.

04/18/23
BackgroundPervasive computingpositioning needsRelated works
BackgroundPervasive computingpositioning needsRelated works
BackgroundPervasive computingpositioning needsRelated works
BackgroundPervasive computingpositioning needsRelated works
Topics
BackgroundPervasive computingpositioning needsRelated works
BackgroundPervasive computingpositioning needsRelated works
Model for indoor location detection Learning phase Prediction Phase
Model for indoor location detection Learning phase Prediction Phase
Experimental results and usage scenarioExperimental results and usage scenario
Conclusions and future workConclusions and future work

04/18/23
Experimental results …The size of the PMML file containing the model generated after about 4 hours of tracking experiment using three devices is about 320 KB (200rules) and it is within the storage range of mobile devices.Using a cross validation, the results are very encouraging with the error rate below 5%, corresponding to a 95% hit rate.
The size of the PMML file containing the model generated after about 4 hours of tracking experiment using three devices is about 320 KB (200rules) and it is within the storage range of mobile devices.Using a cross validation, the results are very encouraging with the error rate below 5%, corresponding to a 95% hit rate.IF 00_06_5A_E0_0D_FA < -74,00 and 00_06_5A_80_0D_C9 >=-
87,00 THEN LOCATION in [501.342] with accuracy 1,0000 IF 00_06_5A_E0_0D_FA < -74,00 and 00_06_5A_80_0D_C9 < -87,00 and 00_06_5A_60_0D_C6 < -68,50 and 00_06_5A_20_0D_DB < -77,50 and 00_06_5A_80_0C_BD >=-73,50 and 00_06_5A_C0_0D_D7 >=-92,50 and 00_06_5A_E0_0D_D7 < -85,00 THEN LOCATION in [501.329] with accuracy 0,9877 IF 00_06_5A_E0_0D_FA < -74,00 and 00_06_5A_80_0D_C9 < -87,00 and 00_06_5A_60_0D_C6 < -68,50 and 00_06_5A_20_0D_DB < -77,50 and 00_06_5A_80_0C_BD >=-73,50 and 00_06_5A_C0_0D_D7 >=-92,50 and 00_06_5A_E0_0D_D7 >=-85,00 THEN LOCATION in [501.210] with accuracy 1,0000
Sam
ple
ru
les
gen
erat
ed
as a
pre
dic
tio
n m
od
el

04/18/23
… Experimental results
Using the Principal Component Analysis (PCA) algorithm, projection of multidimensional data from all visible APIs into 2 dimensions space shows that the data is well separable.
04/18/23
Usage scenario …
Consider a scenario where Dave is given a multimedia entertainment service on his PDA while he is in the common room for the tea break.
Consider a scenario where Dave is given a multimedia entertainment service on his PDA while he is in the common room for the tea break.
SHARE SERVICE multimedia_player ON BASE LOCALHOST WITH SERVICE multimedia_player ON BASE ALL IN NEIGHBORHOOD
SHARE SERVICE multimedia_player ON BASE LOCALHOST WITH SERVICE multimedia_player ON BASE ALL IN NEIGHBORHOOD
The common room is also used by some friends of David. They too are also equipped with PDAs.
The common room is also used by some friends of David. They too are also equipped with PDAs.
David wants to share the seen of his video with his friends. In this case he will use the middleware PerSE to express his intention in PSAQL.
David wants to share the seen of his video with his friends. In this case he will use the middleware PerSE to express his intention in PSAQL.

04/18/23
… Usage scenarioLocation prediction combined with context information to determine David’s intension in proactively.
Location prediction combined with context information to determine David’s intension in proactively.
IF BASE = LOCALHOST AND BASE_NAME = “PDA_DAVID” AND LOCATION = “CommonRoom” AND RunningAction = “USE * WITH SERVICE multimedia_player ON BASE LOCALHOST” THEN TriggerAction = “SHARE SERVICE multimedia_player ON BASE LOCALHOST WITH SERVICE multimedia_player ON BASE ALL IN NEIGHBORHOOD”
IF BASE = LOCALHOST AND BASE_NAME = “PDA_DAVID” AND LOCATION = “CommonRoom” AND RunningAction = “USE * WITH SERVICE multimedia_player ON BASE LOCALHOST” THEN TriggerAction = “SHARE SERVICE multimedia_player ON BASE LOCALHOST WITH SERVICE multimedia_player ON BASE ALL IN NEIGHBORHOOD”
The primary role of the prediction model is in this example is to detect that PDA_DAVID is in the Common_Room. It continues detecting who else is present in the room.
The primary role of the prediction model is in this example is to detect that PDA_DAVID is in the Common_Room. It continues detecting who else is present in the room.

04/18/23
BackgroundPervasive computingpositioning needsRelated works
BackgroundPervasive computingpositioning needsRelated works
BackgroundPervasive computingpositioning needsRelated works
BackgroundPervasive computingpositioning needsRelated works
Topics
BackgroundPervasive computingpositioning needsRelated works
BackgroundPervasive computingpositioning needsRelated works
Model for indoor location detection Learning phase Prediction Phase
Model for indoor location detection Learning phase Prediction Phase
Experimental results and usage scenarioExperimental results and usage scenario
Conclusions and future workConclusions and future work
04/18/23
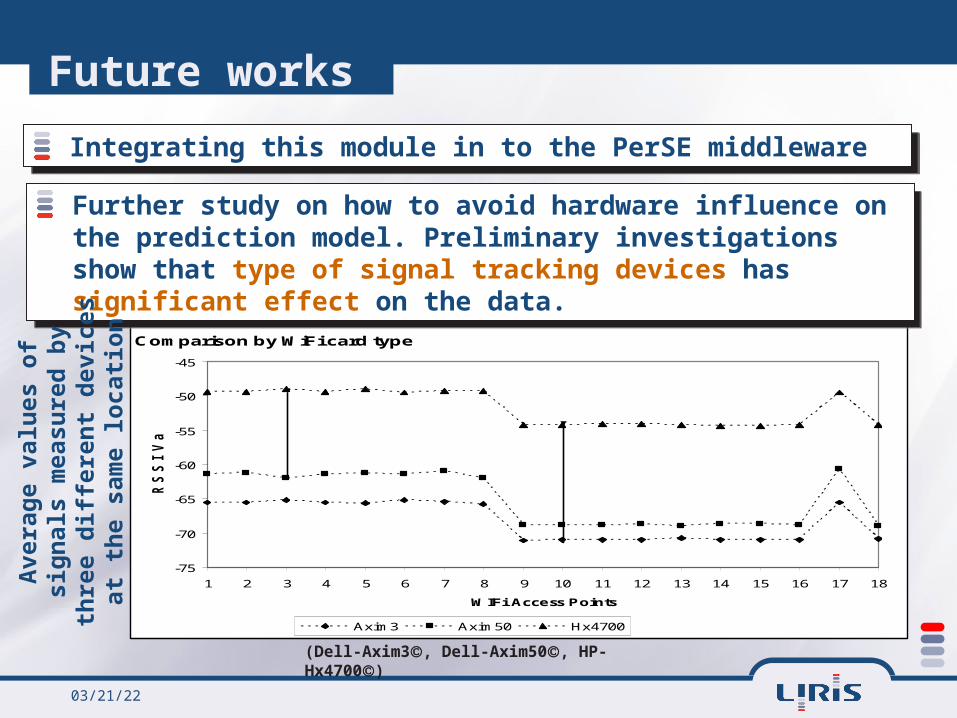
Future works
Integrating this module in to the PerSE middlewareIntegrating this module in to the PerSE middleware
Comparison by WiFi card type
-75
-70
-65
-60
-55
-50
-45
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
WIFi Access Points
RS
SI
Valu
e
Axim3 Axim50 Hx4700
16.44
13.41
Further study on how to avoid hardware influence on the prediction model. Preliminary investigations show that type of signal tracking devices has significant effect on the data.
Further study on how to avoid hardware influence on the prediction model. Preliminary investigations show that type of signal tracking devices has significant effect on the data.
Ave
rag
e va
lues
of
sig
nal
s m
easu
red
by
thre
e d
iffe
ren
t d
evic
es a
t th
e sa
me
loca
tio
n
(Dell-Axim3, Dell-Axim50, HP-Hx4700)

04/18/23
Conclusions
Indoor neighbourhood relation between users is represented:Not by the physical proximity, but by the
perception of the presence in the same physically or visually bounded place
Indoor neighbourhood relation between users is represented:Not by the physical proximity, but by the
perception of the presence in the same physically or visually bounded place
We have presented our positioning model for pervasive neighbourhood relationship using the room/office positioning information using database methods
We have presented our positioning model for pervasive neighbourhood relationship using the room/office positioning information using database methodsThe result is found encouraging wit 95% hit rateThe result is found encouraging wit 95% hit rate

04/18/23
TopicsBackgroundPervasive computingpositioning needsRelated works
Model for indoor location detectionLearning phasePrediction Phase
Experimental results and usage scenario
Conclusions and future work
BackgroundPervasive computingpositioning needsRelated works
Model for indoor location detectionLearning phasePrediction Phase
Experimental results and usage scenario
Conclusions and future work
Thank You !!
















![1 Univ Lyon, UCBL, CNRS, LIRIS UMR 5205, F-69621, Lyon, France … · 2018-11-30 · arXiv:1811.12159v1 [cs.SI] 11 Oct 2018 Systematic Biases in Link Prediction: comparing heuristic](https://static.fdocuments.in/doc/165x107/5eaec93bdf3d884606071a7c/1-univ-lyon-ucbl-cnrs-liris-umr-5205-f-69621-lyon-france-2018-11-30-arxiv181112159v1.jpg)

