
Kinematics
120
KOM/AJM/MECH/N.P.R.C.E.T Page 1 ISO 9001:2008 N.P.R. COLLEGE OF ENGINEERING & TECHNOLOGY N.P.R. Nagar, Natham - 624 401, Tamil Nadu, India. AN ISO 9001:2008 Certified Institution (Approved by AICTE, New Delhi, Affiliated to Anna University, Tiruchirappalli) No. : 04544 - 291333, 291334, 245422, 245423 & Fax No.: 04544-245392, 93 Website: www.nprcet.org , www.nprcolleges.org E-Mail: [email protected] Kinematics of Machinery III SEMESTER MECHANICAL ENGINEERING Prepared by John Martin .A, Asst.Professor, Department of Mechanical Engineering, N.P.R.College of Engineering and Technology, Natham.
-
Upload
dhanashri-kulkarni-joglekar -
Category
Documents
-
view
152 -
download
12
description
notes
Transcript of Kinematics
N.P.R. COLLEGE OF ENGINEERING & TECHNOLOGYN.P.R. Nagar, Natham - 624 401, Tamil Nadu, India.
AN ISO 9001:2008 Certified Institution(Approved by AICTE, New Delhi, Affiliated to Anna University, Tiruchirappalli) No. : 04544 - 291333, 291334, 245422, 245423 & Fax No.: 04544-245392, 93 Website: www.nprcet.org, www.nprcolleges.org E-Mail: [email protected] 9001:2008
Kinematics of MachineryIII SEMESTER MECHANICAL ENGINEERING
Prepared by John Martin .A, Asst.Professor, Department of Mechanical Engineering, N.P.R.College of Engineering and Technology, Natham.
KOM/AJM/MECH/N.P.R.C.E.T
Page 1
ME1202 KINEMATICS OF MACHINERY 3104 UNIT I BASICS OF MECHANISMS 7
LTPC
Definitions Link Kinematic pair Kinematic chain Mechanism Machine Degree of Freedom Mobility Kutzbach criterion (Grueblers equation) Grashoff's law Kinematic Inversions of four-bar chain and slider crank chain Mechanical Advantage Transmission angle Description of common Mechanisms Offset slider mechanism as quick return mechanisms Pantograph Straight line generators (Peaucellier and Watt mechanisms) Steering gear for automobile Hookes joint Toggle mechanism Ratchets Escapements Indexing Mechanisms UNIT II KINEMATIC ANALYSIS 10 Analysis of simple mechanisms (Single slider crank mechanism and four bar mechanism) Graphical Methods for displacement Velocity and Acceleration Shaping machine mechanism Coincident points Coriolis acceleration Analytical method of analysis of slider crank mechanism and four bar mechanism Approximate analytical expression for displacement, velocity and acceleration of piston of reciprocating engine mechanism. UNIT III KINEMATICS OF CAMS 8 Classifications Displacement diagrams Parabolic, Simple harmonic and Cycloidal motions Graphical construction of displacement diagrams and layout of plate cam profiles Circular arc and tangent cams Pressure angle and undercutting. UNIT IV GEARS 10 Classification of gears Gear tooth terminology Fundamental law of toothed gearing and involute KOM/AJM/MECH/N.P.R.C.E.T Page 2
gearing Length of path of contact and contact ratio Interference and undercutting Gear trains Simple Compound Epicyclic gear trains Differentials. UNIT V FRICTION 10 Dry friction Friction in screw jack Pivot and collar friction Plate clutches Belt and rope drives Block brakes Band brakes L: 45 T: 15 Total: 60 TEXT BOOKS 1. Ambekar, A.G., Mechanism and Machine Theory, Prentice Hall of India, 2007. 2. Uicker, J.J., Pennock, G.R. and Shigley, J.E., Theory of Machines and Mechanisms(Indian Edition), Oxford University Press, 2003. REFERENCES 1. Thomas Bevan, Theory of Machines, CBS Publishers and Distributors, 1984. 2. Ramamurti, V., Mechanism and Machine Theory, 2nd Edition, Narosa Publishing House, 2005. 3. Ghosh, A. and Mallick, A.K., Theory of Mechanisms and Machines, Affiliated East-West Pvt. Ltd., 1998. BIS Codes of Practice/Useful Websites 1. IS 2458 : 2001, Vocabulary of Gear Terms Definitions Related to Geometry 2. IS 2467 : 2002 (ISO 701: 1998), International Gear Notation Symbols for Geometric Data. 3. IS 5267 : 2002 Vocabulary of Gear Terms Definitions Related to Worm Gear Geometry. 4. IS 5037 : Part 1 : 2004, Straight Bevel Gears for General Engineering and Heavy Engineering - Part 1: Basic Rack. 5. IS 5037 : Part 2 : 2004, Straight Bevel Gears for General Engineering and Heavy Engineering - Part 2: Module and Diametral Pitches. Web site: www.howstuffworks.com
KOM/AJM/MECH/N.P.R.C.E.T
Page 3
Objective: To study the mechanism, machine and the geometric aspect of motion. Unit I BASICS OF MECHANISMS
Introduction: The objective of kinematics is to develop various means of transforming motion to achieve a specific kind needed in applications. For example, an object is to be moved from point A to point B along some path. The first question in solving this problem is usually: What kind of a mechanism (if any) can be used to perform this function? And the second question is: How does one design such a mechanism?
The objective of dynamics is analysis of the behavior of a given machine or mechanism when subjected to dynamic forces. For the above example, when the mechanism is already known, then external forces are applied and its motion is studied. The determination of forces induced in machine components by the motion is part of this analysis. As a subject, the kinematics and dynamics of machines and mechanisms is disconnected from other subjects (except statics and dynamics) in the Mechanical Engineering curriculum. This absence of links to other subjects may create the false impression that there are no constraints, apart from the kinematic ones, imposed on the design of mechanisms. Look again at the problem of moving an object from A to B. In designing a mechanism, the size, shape, and weight of the object all constitute input into the design process. All of these will affect the size of the mechanism. There are other considerations as well, such as, for example, what the allowable speed of approaching point B should be. The outcome of this inquiry may affect either the configuration or the type of the mechanism. Within the subject of kinematics and dynamics of machines and mechanisms such requirements cannot be justifiably formulated; they can, however, be posed as a learning exercise.
KOM/AJM/MECH/N.P.R.C.E.T
Page 4
KINEMATICS AND DYNAMICS AS PART OF THE DESIGN PROCESS The role of kinematics is to ensure the functionality of the mechanism, while the role of dynamics is to verify the acceptability of induced forces in parts. The functionality and induced forces are subject to various constraints (specifications) imposed on the design. Look at the example of a cam operating a valve Fundamentals of Kinematics and Dynamics of Machines and Mechanisms The design process starts with meeting the functional requirements of the product. The basic one in this case is the proper opening, dwelling, and closing of the valve as a function of time. To achieve this objective, a corresponding cam profile producing the needed follower motion should be found. The rocker arm, being a lever, serves as a displacement amplifier/reducer. The timing of opening, dwelling, and closing is controlled by the speed of the camshaft. The function of the spring is to keep the roller always in contact with the cam. To meet this requirement the inertial forces developed during the followervalve system motion should be known, since the spring force must be larger than these forces at any time. Thus, it follows that the determination of component accelerations needed to find inertial forces is important for the choice of the proper spring stiffness. Kinematical analysis allows one to satisfy the functional requirements for valve displacements. Dynamic analysis allows one to find forces in the system as a function of time. These forces are needed to continue the design process. The design process continues with meeting the constraints requirements, which in this case are: 1. Sizes of all parts; 2. Sealing between the valve and its seat; 3. Lubrication; 4. Selection of materials; 5. Manufacturing and maintenance; 6. Safety; 7. Assembly, etc. The forces transmitted through the system during cam rotation allow one to KOM/AJM/MECH/N.P.R.C.E.T Page 5
determine the proper sizes of components, and thus to find the overall assembly dimension. The spring force affects the reliability of the valve sealing. If any of the requirements cannot be met with the given assembly design, then another set of parameters should be chosen, and the kinematic and dynamic analysis repeated for the new version. Thus, kinematic and dynamic analysis is an integral part of the machine design process, which means it uses input from this process and produces output for its continuation.
IS IT A MACHINE, A MECHANISM, OR A STRUCTURE? The term machine is usually applied to a complete product. A car is a machine, as is a tractor, a combine, an earthmoving machine, etc. At the same time, each of these machines may have some devices performing specific functions, like a windshield wiper in a car, which are called mechanisms. An internal combustion engine is called neither a machine nor a mechanism. It is clear that there is a historically established terminology and it may not be consistent. What is important, as far as the subject of kinematics and dynamics is concerned, is that the identification of something as a machine or a mechanism has no bearing on the analysis to be done. And thus in the following, the term machine or mechanism in application to a specific device will be used according to the established custom. The distinction between the machine/mechanism and the structure is more fundamental. The former must have moving parts, since it transforms motion, produces work, or transforms energy. The latter does not have moving parts; its function is purely structural, i.e., to maintain its form and shape under given external loads, like a bridge, a building, or an antenna mast. Fundamentals of Kinematics and Dynamics of Machines and Mechanisms chair, or a solar antenna, may be confusing. Before the folding chair can be used as a chair, it must be unfolded. The transformation from a folded to an unfolded state is the transformation of motion. Thus, the folding chair meets two definitions: it is a mechanism during unfolding and a structure when unfolding is completed. Again, the terminology should not affect the understanding of the substance of the matter. Definitions : Link or Element, Pairing of Elements with degrees of freedom, Grublers criterion (without derivation), Kinematic chain, Mechanism, Mobility of Mechanism, Inversions, Machine. KOM/AJM/MECH/N.P.R.C.E.T Page 6
Kinematic Chains and Inversions : Recall that a kinematic chain becomes a mechanism when one of the links in the chain becomes a frame. The process of choosing different links in the chain as framesis known as kinematic inversion. In this way, for an n-link chain n different mechanisms can be obtained. An example of a four-link slider-crank chain shows how different mechanisms are obtained by fixing different links functionally. Steam engines
Beam engine, with twin connecting rods (almost vertical) between the horizontal beam and the flywheel cranks The first steam engines, Newcomen's atmospheric engine, was single-acting: its piston only did work in one direction, and so these used a chain rather than a connecting rod. Their output rocked back and forth, rather than rotating continuously.
Crosshead of a stationary steam engine: piston rod to the left, connecting rod to the right Steam engines after this are usually double-acting: their internal pressure works on each side of the piston in turn. This requires a seal around the piston rod and so the KOM/AJM/MECH/N.P.R.C.E.T Page 7
hinge between the piston and connecting rod is placed outside the cylinder, in a large sliding bearing block called a crosshead.
Steam locomotive rods, the large angled rod being the connecting rod Internal combustion engines
Compound rods
Articulated connecting rods in a WW1 aero-engine
BMW 132 radial engine rods
LINKS
KOM/AJM/MECH/N.P.R.C.E.T
Page 8
KOM/AJM/MECH/N.P.R.C.E.T
Page 9
Types Of Mechanisms: i) Quick return motion mechanisms Drag link mechanism, Whitworth mechanism and Crank and slotted lever mechanism ii) Straight line motion mechanisms Peaceliers mechanism and Roberts mechanism. iii) Intermittent motion mechanisms Geneva mechanism and Ratchet & Pawl mechanism. iv) Toggle mechanism, Pantograph, Hookes joint and Ackerman Steering gear mechanism.
1. Terminology and Definitions-Degree of Freedom, Mobility Kinematics: The study of motion (position, velocity, acceleration). A major goal of understanding kinematics is to develop the ability to design a system that will satisfy specified motion requirements. This will be the emphasis of this class. Kinetics: The effect of forces on moving bodies. Good kinematic design should produce good kinetics. Mechanism: A system design to transmit motion. (low forces) Machine: A system designed to transmit motion and energy. (forces involved) Basic Mechanisms: Includes geared systems, cam-follower systems and linkages (rigid links connected by sliding or rotating joints). A mechanism has multiple moving parts (for example, a simple hinged door does not qualify as a mechanism). Examples of mechanisms: Tin snips, vise grips, car suspension, backhoe, piston engine, folding chair, windshield wiper drive system, etc. KOM/AJM/MECH/N.P.R.C.E.T Page 10
Key concepts: Degrees of freedom: The number of inputs required to completely control a system. Examples: A simple rotating link. A two link system. A four-bar linkage. A five-bar linkage. Types of motion: Mechanisms may produce motions that are pure rotation, pure translation, or a combination of the two. We reduce the degrees of freedom of a mechanism by restraining the ability of the mechanism to move in translation (x-y directions for a 2D mechanism) or in rotation (about the zaxis for a 2-D mechanism). Link: A rigid body with two or more nodes (joints) that are used to connect to other rigid bodies. (WM examples: binary link, ternary link (3 joints), quaternary link (4 joints)) Joint: A connection between two links that allows motion between the links. The motion allowed may be rotational (revolute joint), translational (sliding or prismatic joint), or a combination of the two (roll-slide joint). Kinematic chain: An assembly of links and joints used to coordinate an output motion with an input motion. Link or element:
A mechanism is made of a number of resistant bodies out of which some may have motions relative to the others. A resistant body or a group of resistant bodies with rigid connections preventing their relative movement is known as a link.
KOM/AJM/MECH/N.P.R.C.E.T
Page 11
A link may also be defined as a member or a combination of members of a mechanism, connecting other members and having motion relative to them, thus a link may consist of one or more resistant bodies. A link is also known as Kinematic link or an element. Links can be classified into 1) Binary, 2) Ternary, 3) Quarternary, etc. Kinematic Pair: A Kinematic Pair or simply a pair is a joint of two links having relative motion between them. Example:
In the above given Slider crank mechanism, link 2 rotates relative to link 1 and constitutes a revolute or turning pair. Similarly, links 2, 3 and 3, 4 constitute turning pairs. Link 4 (Slider) reciprocates relative to link 1 and its a sliding pair. Types of Kinematic Pairs: Kinematic pairs can be classified according to i) Nature of contact. ii) Nature of mechanical constraint. iii) Nature of relative motion. i) Kinematic pairs according to nature of contact : a) Lower Pair: A pair of links having surface or area contact between the members is known as a lower pair. The contact surfaces of the two links are similar. Examples: Nut turning on a screw, shaft rotating in a bearing, all pairs of a slidercrank mechanism, universal joint. b) Higher Pair: When a pair has a point or line contact between the links, it is known as a higher pair. The contact surfaces of the two links are dissimilar. Examples: Wheel rolling on a surface cam and follower pair, tooth gears, ball and roller bearings, etc. ii) Kinematic pairs according to nature of mechanical constraint. a) Closed pair: When the elements of a pair are held together mechanically, it is known as a closed pair. The contact between the two can only be broken only by the destruction of at least one of the members. All the lower pairs and some of the higher pairs are closed pairs. b) Unclosed pair: When two links of a pair are in contact either due to force of gravity or some spring action, they constitute an unclosed pair. In this the links are not held together mechanically. Ex.: Cam and follower pair. iii) Kinematic pairs according to nature of relative motion. KOM/AJM/MECH/N.P.R.C.E.T Page 12
a) Sliding pair: If two links have a sliding motion relative to each other, they form a sliding pair. A rectangular rod in a rectangular hole in a prism is an example of a sliding pair. b) Turning Pair: When on link has a turning or revolving motion relative to the other, they constitute a turning pair or revolving pair. c) Rolling pair: When the links of a pair have a rolling motion relative to each other, they form a rolling pair. A rolling wheel on a flat surface, ball ad roller bearings, etc. are some of the examples for a Rolling pair. d) Screw pair (Helical Pair): if two mating links have a turning as well as sliding motion between them, they form a screw pair. This is achieved by cutting matching threads on the two links. The lead screw and the nut of a lathe is a screw Pair e) Spherical pair: When one link in the form of a sphere turns inside a fixed link, it is a spherical pair. The ball and socket joint is a spherical pair. Degrees of Freedom: An unconstrained rigid body moving in space can describe the following independent motions. 1. Translational Motions along any three mutually perpendicular axes x, y and z, 2. Rotational motions along these axes. Thus a rigid body possesses six degrees of freedom. The connection of a link with another imposes certain constraints on their relative motion. The number of restraints can never be zero (joint is disconnected) or six (joint becomes solid). Degrees of freedom of a pair is defined as the number of independent relative motions, both translational and rotational, a pair can have. Degrees of freedom = 6 no. of restraints. To find the number of degrees of freedom for a plane mechanism we have an equation known as Grublers equation and is given by F = 3 ( n 1 ) 2 j1 j2 F = Mobility or number of degrees of freedom n = Number of links including frame. j1 = Joints with single (one) degree of freedom. J2 = Joints with two degrees of freedom. If F > 0, results in a mechanism with F degrees of freedom. F = 0, results in a statically determinate structure. F < 0, results in a statically indeterminate structure. Kinematic Chain: A Kinematic chain is an assembly of links in which the relative motions of the links is possible and the motion of each relative to the others is definite (fig. a, b, and c.)
KOM/AJM/MECH/N.P.R.C.E.T
Page 13
In case, the motion of a link results in indefinite motions of other links, it is a nonkinematic chain. However, some authors prefer to call all chains having relative motions of the links as kinematic chains. Linkage, Mechanism and structure: A linkage is obtained if one of the links of kinematic chain is fixed to the ground. If motion of each link results in definite motion of the others, the linkage is known as mechanism. If one of the links of a redundant chain is fixed, it is known as a structure. To obtain constrained or definite motions of some of the links of a linkage, it is necessary to know how many inputs are needed. In some mechanisms, only one input is necessary that determines the motion of other links and are said to have one degree of freedom. In other mechanisms, two inputs may be necessary to get a constrained motion of the other links and are said to have two degrees of freedom and so on. The degree of freedom of a structure is zero or less. A structure with negative degrees of freedom is known as a Superstructure. Motion and its types:
KOM/AJM/MECH/N.P.R.C.E.T
Page 14
Completely Constrained Motion
Partially Constrained Motion
Incompletely Constrained Motion
The three main types of constrained motion in kinematic pair are, 1.Completely constrained motion : If the motion between a pair of links is limited to a definite direction, then it is completely constrained motion. E.g.: Motion of a shaft or rod with collars at each end in a hole as shown in fig.
2. Incompletely Constrained motion : If the motion between a pair of links is not confined to a definite direction, then it is incompletely constrained motion. E.g.: A spherical ball or circular shaft in a circular hole may either rotate or slide in the hole as shown in fig.
KOM/AJM/MECH/N.P.R.C.E.T
Page 15
3. Successfully constrained motion or Partially constrained motion: If the motion in a definite direction is not brought about by itself but by some other means, then it is known as successfully constrained motion. E.g.: Foot step Bearing.
Machine: It is a combination of resistant bodies with successfully constrained motion which is used to transmit or transform motion to do some useful work. E.g.: Lathe, Shaper, Steam Engine, etc. Kinematic chain with three lower pairs It is impossible to have a kinematic chain consisting of three turning pairs only. But it is possible to have a chain which consists of three sliding pairs or which consists of a turning, sliding and a screw pair. The figure shows a kinematic chain with three sliding pairs. It consists of a frame B, wedge C and a sliding rod A. So the three sliding pairs are, one between the wedge C and the frame B, second between wedge C and sliding rod A and the frame B.
This figure shows the mechanism of a fly press. The element B forms a sliding with A and turning pair with screw rod C which in turn forms a screw pair with A. When link A is fixed, the required fly press mechanism is obtained.
KOM/AJM/MECH/N.P.R.C.E.T
Page 16
2. Kutzbach criterion, Grashoff's law Kutzbach criterion: Fundamental Equation for 2-D Mechanisms: M = 3(L 1) 2J1 J2 Can we intuitively derive Kutzbachs modification of Grublers equation? Consider a rigid link constrained to move in a plane. How many degrees of freedom does the link have? (3: translation in x and y directions, rotation about z-axis) If you pin one end of the link to the plane, how many degrees of freedom does it now have? Add a second link to the picture so that you have one link pinned to the plane and one free to move in the plane. How many degrees of freedom exist between the two links? (4 is the correct answer) Pin the second link to the free end of the first link. How many degrees of freedom do you now have? How many degrees of freedom do you have each time you introduce a moving link? How many degrees of freedom do you take away when you add a simple joint? How many degrees of freedom would you take away by adding a half joint? Do the different terms in equation make sense in light of this knowledge? Grashoff's law: Grashoff 4-bar linkage: A linkage that contains one or more links capable of undergoing a full rotation. A linkage is Grashoff if: S + L < P + Q (where: S = shortest link length, L = longest, P, Q = intermediate length links). Both joints of the shortest link are capable of 360 degrees of rotation in a Grashoff linkages. This gives us 4 possible linkages: crank-rocker (input rotates 360), rocker-crank-rocker (coupler rotates 360), rocker-crank (follower); double crank (all links rotate 360). Note that these mechanisms are simply the possible inversions (section 2.11, Figure 2-16) of a Grashoff mechanism. Non Grashoff 4 bar: No link can rotate 360 if: S + L > P + Q Lets examine why the Grashoff condition works: Consider a linkage with the shortest and longest sides joined together. Examine the linkage when the shortest side is parallel to the longest side (2 positions possible, folded over on the long side and extended away from the long side). How long do P and Q have to be to allow the linkage to achieve these positions? Consider a linkage where the long and short sides are not joined. Can you figure out the required lengths for P and Q in this type of mechanism 3. Kinematic Inversions of 4-bar chain and slider crank chains: Types of Kinematic Chain: 1) Four bar chain 2) Single slider chain 3) Double Slider chain Four bar Chain: The chain has four links and it looks like a cycle frame and hence it is also called quadric cycle chain. It is shown in the figure. In this type of chain all four pairs will be turning pairs. KOM/AJM/MECH/N.P.R.C.E.T Page 17
Inversions: By fixing each link at a time we get as many mechanisms as the number of links, then each mechanism is called Inversion of the original Kinematic Chain. Inversions of four bar chain mechanism: There are three inversions: 1) Beam Engine or Crank and lever mechanism. 2) Coupling rod of locomotive or double crank mechanism. 3) Watts straight line mechanism or double lever mechanism. Beam Engine: When the crank AB rotates about A, the link CE pivoted at D makes vertical reciprocating motion at end E. This is used to convert rotary motion to reciprocating motion and vice versa. It is also known as Crank and lever mechanism. This mechanism is shown in the figure below.
2. Coupling rod of locomotive: In this mechanism the length of link AD = length of link C. Also length of link AB = length of link CD. When AB rotates about A, the crank DC rotates about D. this mechanism is used for coupling locomotive wheels. Since links AB and CD work as cranks, this mechanism is also known as double crank mechanism. This is shown in the figure below.
KOM/AJM/MECH/N.P.R.C.E.T
Page 18
3. Watts straight line mechanism or Double lever mechanism: In this mechanism, the links AB & DE act as levers at the ends A & E of these levers are fixed. The AB & DE are parallel in the mean position of the mechanism and coupling rod BD is perpendicular to the levers AB & DE. On any small displacement of the mechanism the tracing point C traces the shape of number 8, a portion of which will be approximately straight. Hence this is also an example for the approximate straight line mechanism. This mechanism is shown below.
2. Slider crank Chain: It is a four bar chain having one sliding pair and three turning pairs. It is shown in the figure below the purpose of this mechanism is to convert rotary motion to reciprocating motion and vice versa. Inversions of a Slider crank chain: There are four inversions in a single slider chain mechanism. They are:st
1) Reciprocating engine mechanism (1 inversion)nd
2) Oscillating cylinder engine mechanism (2 inversion)nd
3) Crank and slotted lever mechanism (2 inversion)rd
4) Whitworth quick return motion mechanism (3 inversion)rd
5) Rotary engine mechanism (3 inversion)th
6) Bull engine mechanism (4 inversion)th
7) Hand Pump (4 inversion) 1. Reciprocating engine mechanism : In the first inversion, the link 1 i.e., the cylinder and the frame is kept fixed. The fig below shows a reciprocating engine.
KOM/AJM/MECH/N.P.R.C.E.T
Page 19
A slotted link 1 is fixed. When the crank 2 rotates about O, the sliding piston 4 reciprocates in the slotted link 1. This mechanism is used in steam engine, pumps, compressors, I.C. engines, etc. 2. Crank and slotted lever mechanism: It is an application of second inversion. The crank and slotted lever mechanism is shown in figure below.
In this mechanism link 3 is fixed. The slider (link 1) reciprocates in oscillating slotted lever (link 4) and crank (link 2) rotates. Link 5 connects link 4 to the ram (link 6). The ram with the cutting tool reciprocates perpendicular to the fixed link 3. The ram with the tool reverses its direction of motion when link 2 is perpendicular to link 4. Thus the cutting stroke is executed during the rotation of the crank through angle and the return stroke is executed when the crank rotates through angle or 360 . Therefore, when the crank rotates uniformly, we get, Time to cutting = = Time of return 360 This mechanism is used in shaping machines, slotting machines and in rotary engines. 3. Whitworth quick return motion mechanism:
Third inversion is obtained by fixing the crank i.e. link 2. Whitworth quick return mechanism is an application of third inversion. This mechanism is shown in the figure below. The crank OC is fixed and OQ rotates about O. The slider slides in the slotted link and generates a circle of radius CP. Link 5 connects the extension OQ provided on the opposite side of the link 1 to the ram (link 6). The rotary motion of P is taken to the ram R which reciprocates. The quick return motion mechanism is used in shapers and slotting machines. The angle covered during cutting stroke from P1 to P2 in counter clockwise direction is or 360 -2. During the return stroke, the angle covered is 2 or . KOM/AJM/MECH/N.P.R.C.E.T Page 20
Therefore,
Time to cutting = 360 -2 = 180 Time of return 2 = = . 360
4. Rotary engine mechanism or Gnome Engine: Rotary engine mechanism or gnome engine is another application of third inversion. It is a rotary cylinder V type internal combustion engine used as an aero engine. But now Gnome engine has been replaced by Gas turbines. The Gnome engine has generally seven cylinders in one plane. The crank OA is fixed and all the connecting rods from the pistons are connected to A. In this mechanism when the pistons reciprocate in the cylinders, the whole assembly of cylinders, pistons and connecting rods rotate about the axis O, where the entire mechanical power developed, is obtained in the form of rotation of the crank shaft. This mechanism is shown in the figure below.
Double Slider Crank Chain: A four bar chain having two turning and two sliding pairs such that two pairs of the same kind are adjacent is known as double slider crank chain. Inversions of Double slider Crank chain: It consists of two sliding pairs and two turning pairs. They are three important inversions of double slider crank chain. 1) Elliptical trammel. 2) Scotch yoke mechanism. 3) Oldhams Coupling. 1. Elliptical Trammel: This is an instrument for drawing ellipses. Here the slotted link is fixed. The sliding block P and Q in vertical and horizontal slots respectively. The end R generates an ellipse with the displacement of sliders P and Q.
The co-ordinates of the point R are x and y. From the fig. cos = x. PR and Sin = y. QR Squaring and adding (i) and (ii) we get x2 + y2 = cos2 + sin2 2 2
(PR) KOM/AJM/MECH/N.P.R.C.E.T
(QR) Page 21
x22
+ y2 = 12
(PR) (QR) The equation is that of an ellipse, Hence the instrument traces an ellipse. Path traced2 2 2 2
by mid-point of PQ is a circle. In this case, PR = PQ and so x +y =1 (PR) (QR) It is an equation of circle with PR = QR = radius of a circle. 2. Scotch yoke mechanism: This mechanism, the slider P is fixed. When PQ rotates above P, the slider Q reciprocates in the vertical slot. The mechanism is used to convert rotary to reciprocating mechanism.
3. Oldhams coupling: The third inversion of obtained by fixing the link connecting the 2 blocks P & Q. If one block is turning through an angle, the frame and the other block will also turn through the same angle. It is shown in the figure below.
An application of the third inversion of the double slider crank mechanism is Oldhams coupling shown in the figure. This coupling is used for connecting two parallel shafts when the distance between the shafts is small. The two shafts to be connected have flanges at their ends, secured by forging. Slots are cut in the flanges. These flanges form 1 and 3. An intermediate disc having tongues at right angles and opposite sides is fitted in between the flanges. The intermediate piece forms the link 4 which slides or reciprocates in flanges 1 & 3. The link two is fixed as shown. When flange 1 turns, the intermediate disc 4 must turn through the same angle and whatever angle 4 turns, the flange 3 must turn through the same angle. Hence 1, 4 & 3 must have the same angular velocity at every instant. If the distance between the axis of the shaft is x, it will be the diameter if the circle traced by the centre of the intermediate piece. The maximum sliding speed of each tongue along its slot is given by v=x where, = angular velocity of each shaft in rad/sec v = linear velocity in m/sec
KOM/AJM/MECH/N.P.R.C.E.T
Page 22
4. Mechanical Advantage, Transmission angle: The mechanical advantage (MA) is defined as the ratio of output torque to the input torque. (or) ratio of load to output. Transmission angle. The extreme values of the transmission angle occur when the crank lies along the line of frame. 5. Description of common mechanisms-Single, Double and offset slider mechanisms - Quick return mechanisms: Quick Return Motion Mechanisms: Many a times mechanisms are designed to perform repetitive operations. During these operations for a certain period the mechanisms will be under load known as working stroke and the remaining period is known as the return stroke, the mechanism returns to repeat the operation without load. The ratio of time of working stroke to that of the return stroke is known a time ratio. Quick return mechanisms are used in machine tools to give a slow cutting stroke and a quick return stroke. The various quick return mechanisms commonly used are i) Whitworth ii) Drag link. iii) Crank and slotted lever mechanism 1. Whitworth quick return mechanism: Whitworth quick return mechanism is an application of third inversion of the single slider crank chain. This mechanism is shown in the figure below. The crank OC is fixed and OQ rotates about O. The slider slides in the slotted link and generates a circle of radius CP. Link 5 connects the extension OQ provided on the opposite side of the link 1 to the ram (link 6). The rotary motion of P is taken to the ram R which reciprocates. The quick return motion mechanism is used in shapers and slotting machines.
The angle covered during cutting stroke from P1 to P2 in counter clockwise direction is or 360 -2. During the return stroke, the angle covered is 2 or . 2. Drag link mechanism :
KOM/AJM/MECH/N.P.R.C.E.T
Page 23
This is four bar mechanism with double crank in which the shortest link is fixed. If the crank AB rotates at a uniform speed, the crank CD rotate at a non-uniform speed. This rotation of link CD is transformed to quick return reciprocatory motion of the ram E by the link CE as shown in figure. When the crank AB rotates through an angle in Counter clockwise direction during working stroke, the link CD rotates through 180. We can observe that / >/ . Hence time of working stroke is / times more or the return stroke is / times quicker. Shortest link is always stationary link. Sum of the shortest and the longest links of the four links 1, 2, 3 and 4 are less than the sum of the other two. It is the necessary condition for the drag link quick return mechanism. 3. Crank and slotted lever mechanism: It is an application of second inversion. The crank and slotted lever mechanism is shown in figure below.
In this mechanism link 3 is fixed. The slider (link 1) reciprocates in oscillating slotted lever (link 4) and crank (link 2) rotates. Link 5 connects link 4 to the ram (link 6). The ram with the cutting tool reciprocates perpendicular to the fixed link 3. The ram with the tool reverses its direction of motion when link 2 is perpendicular to link 4. Thus the cutting stroke is executed during the rotation of the crank through angle and the return stroke is executed when the crank rotates through angle or 360 . Therefore, when the crank rotates uniformly, we get, Time to cutting = = Time of return 360 This mechanism is used in shaping machines, slotting machines and in rotary engines. 6. Ratchets and escapements - Indexing Mechanisms - Rocking Mechanisms: Intermittent motion mechanism: 1. Ratchet and Pawl mechanism: This mechanism is used in producing intermittent rotary motion member. A ratchet and Pawl mechanism consists of a ratchet wheel 2 and a pawl 3 as shown in the figure. When the lever 4 carrying pawl is raised, the ratchet wheel rotates in the counter clock wise direction (driven by pawl). As the pawl lever is lowered the pawl slides over the ratchet teeth. One more pawl 5 is used to prevent the ratchet from reversing. Ratchets are used in feed mechanisms, lifting jacks, clocks, watches and counting devices.
KOM/AJM/MECH/N.P.R.C.E.T
Page 24
2. Geneva mechanism: Geneva mechanism is an intermittent motion mechanism. It consists of a driving wheel D carrying a pin P which engages in a slot of follower F as shown in figure. During one quarter revolution of the driving plate, the Pin and follower remain in contact and hence the follower is turned by one quarter of a turn. During the remaining time of one revolution of the driver, the follower remains in rest locked in position by the circular arc.
3. Pantograph: Pantograph is used to copy the curves in reduced or enlarged scales. Hence this mechanism finds its use in copying devices such as engraving or profiling machines.
This is a simple figure of a Pantograph. The links are pin jointed at A, B, C and D. AB is parallel to DC and AD is parallel to BC. Link BA is extended to fixed pin O. Q is a point on the link AD. If the motion of Q is to be enlarged then the link BC is extended to P such that O, Q and P are in a straight line. Then it can be shown that the points P and Q always move parallel and similar to each other over any path straight or curved. Their motions will be proportional to their distance from the fixed point. Let ABCD be the initial position. Suppose if point Q moves to Q1 , then all the links and the joints will move to the new positions (such as A moves to A1 , B moves to KOM/AJM/MECH/N.P.R.C.E.T Page 25
Q1, C moves to Q1 , D moves to D1 and P to P1 ) and the new configuration of the mechanism is shown by dotted lines. The movement of Q (Q Q1) will be enlarged to PP1 in a definite ratio. 4. Toggle Mechanism:
In slider crank mechanism as the crank approaches one of its dead centre position, the slider approaches zero. The ratio of the crank movement to the slider movement approaching infinity is proportional to the mechanical advantage. This is the principle used in toggle mechanism. A toggle mechanism is used when large forces act through a short distance is required. The figure below shows a toggle mechanism. Links CD and CE are of same length. Resolving the forces at C vertically F Sin =P Cos 2 Therefore, F = P . (because Sin /Cos = Tan ) 2 tan Thus for the given value of P, as the links CD and CE approaches collinear position (O), the force F rises rapidly. 5. Hookes joint:
Hookes joint used to connect two parallel intersecting shafts as shown in figure. This can also be used for shaft with angular misalignment where flexible coupling does not serve the purpose. Hence Hookes joint is a means of connecting two rotating shafts whose axes lie in the same plane and their directions making a small angle with each other. It is commonly known as Universal joint. In Europe it is called as Cardan joint. 5. Ackermann steering gear mechanism:
This mechanism is made of only turning pairs and is made of only turning pairs wear and tear of the parts is less and cheaper in manufacturing. The cross link KL connects KOM/AJM/MECH/N.P.R.C.E.T Page 26
two short axles AC and BD of the front wheels through the short links AK and BL which forms bell crank levers CAK and DBL respectively as shown in fig, the longer links AB and KL are parallel and the shorter links AK and BL are inclined at an angle . When the vehicles steer to the right as shown in the figure, the short link BL is turned so as to increase , where as the link LK causes the other short link AK to turn so as to reduce . The fundamental equation for correct steering is, CotCos = b / l In the above arrangement it is clear that the angle through which AK turns is less than the angle through which the BL turns and therefore the left front axle turns through a smaller angle than the right front axle. For different angle of turn , the corresponding value of and (Cot Cos ) are noted. This is done by actually drawing the mechanism to a scale or by calculations. Therefore for different value of the corresponding value of and are tabulated. Approximate value of b/l for correct steering should be between 0.4 and 0.5. In an Ackermann steering gear mechanism, the instantaneous centre I does not lie on the axis of the rear axle but on a line parallel to the rear axle axis at an approximate distance of 0.3l above it. Three correct steering positions will be: 1) When moving straight. 2) When moving one correct angle to the right corresponding to the link ratio AK/AB and angle . 3) Similar position when moving to the left. In all other positions pure rolling is not obtainable. Some Of The Mechanisms Which Are Used In Day To Day Life. BELL CRANK: GENEVA STOP:
BELL CRANK: The bell crank was originally used in large house to operate the servants bell, hence the name. The bell crank is used to convert the direction of reciprocating movement. By varying the angle of the crank piece it can be used to change the angle of movement from 1 degree to 180 degrees. GENEVA STOP: The Geneva stop is named after the Geneva cross, a similar shape to the main part of the mechanism. The Geneva stop is used to provide intermittent motion, the orange wheel turns continuously, the dark blue pin then turns the blue cross quarter of a turn for each revolution of the drive wheel. The crescent shaped cut out in dark orange section lets the points of the cross past, then locks the wheel in place when it is stationary. The Geneva stop mechanism is used commonly in film cameras.
KOM/AJM/MECH/N.P.R.C.E.T
Page 27
ELLIPTICAL TRAMMEL
PISTON ARRANGEMENT
ELLIPTICAL TRAMMEL: This fascinating mechanism converts rotary motion to reciprocating motion in two axis. Notice that the handle traces out an ellipse rather than a circle. A similar mechanism is used in ellipse drawing tools. PISTON ARRANGEMENT: This mechanism is used to convert between rotary motion and reciprocating motion, it works either way. Notice how the speed of the piston changes. The piston starts from one end, and increases its speed. It reaches maximum speed in the middle of its travel then gradually slows down until it reaches the end of its travel. RACK AND PINION RATCHET
RACK AND PINION: The rack and pinion is used to convert between rotary and linear motion. The rack is the flat, toothed part, the pinion is the gear. Rack and pinion can convert from rotary to linear of from linear to rotary. The diameter of the gear determines the speed that the rack moves as the pinion turns. Rack and pinions are commonly used in the steering system of cars to convert the rotary motion of the steering wheel to the side to side motion in the wheels. Rack and pinion gears give a positive motion especially compared to the friction drive of a wheel in tarmac. In the rack and pinion railway a central rack between the two rails engages with a pinion on the engine allowing the train to be pulled up very steep slopes. RATCHET: The ratchet can be used to move a toothed wheel one tooth at a time. The part used to move the ratchet is known as the pawl. The ratchet can be used as a way of gearing down motion. By its nature motion created by a ratchet is intermittent. By using two pawls simultaneously this intermittent effect can be almost, but not quite, removed. Ratchets are also used to ensure that motion only occurs in only one
KOM/AJM/MECH/N.P.R.C.E.T
Page 28
direction, useful for winding gear which must not be allowed to drop. Ratchets are also used in the freewheel mechanism of a bicycle. WORM GEAR WATCH ESCAPEMENT.
WORM GEAR: A worm is used to reduce speed. For each complete turn of the worm shaft the gear shaft advances only one tooth of the gear. In this case, with a twelve tooth gear, the speed is reduced by a factor of twelve. Also, the axis of rotation is turned by 90 degrees. Unlike ordinary gears, the motion is not reversible, a worm can drive a gear to reduce speed but a gear cannot drive a worm to increase it. As the speed is reduced the power to the drive increases correspondingly. Worm gears are a compact, efficient means of substantially decreasing speed and increasing power. Ideal for use with small electric motors. WATCH ESCAPEMENT: The watch escapement is the centre of the time piece. It is the escapement which divides the time into equal segments. The balance wheel, the gold wheel, oscillates backwards and forwards on a hairspring (not shown) as the balance wheel moves the lever is moved allowing the escape wheel (green) to rotate by one tooth. The power comes through the escape wheel which gives a small 'kick' to the palettes (purple) at each tick. GEARS CAM FOLLOWER.
GEARS: Gears are used to change speed in rotational movement. In the example above the blue gear has eleven teeth and the orange gear has twenty five. To turn the orange gear one full turn the blue gear must turn 25/11 or 2.2727r turns. Notice that as the blue gear turns clockwise the orange gear turns anti-clockwise. In the above example the number of teeth on the orange gear is not divisible by the number of teeth on the blue gear. This is deliberate. If the orange gear had thirty three teeth then every three turns of the blue gear the same teeth would mesh together which could cause excessive wear. By using none divisible numbers the same teeth mesh only every seventeen turns of the blue gear.
KOM/AJM/MECH/N.P.R.C.E.T
Page 29
CAMS: Cams are used to convert rotary motion into reciprocating motion. The motion created can be simple and regular or complex and irregular. As the cam turns, driven by the circular motion, the cam follower traces the surface of the cam transmitting its motion to the required mechanism. Cam follower design is important in the way the profile of the cam is followed. A fine pointed follower will more accurately trace the outline of the cam. This more accurate movement is at the expense of the strength of the cam follower. STEAM ENGINE.
Steam engines were the backbone of the industrial revolution. In this common design high pressure steam is pumped alternately into one side of the piston, then the other forcing it back and forth. The reciprocating motion of the piston is converted to useful rotary motion using a crank. As the large wheel (the fly wheel) turns a small crank or cam is used to move the small red control valve back and forth controlling where the steam flows. In this animation the oval crank has been made transparent so that you can see how the control valve crank is attached. 7. Straight line generators, Design of Crank-rocker Mechanisms: Straight Line Motion Mechanisms: The easiest way to generate a straight line motion is by using a sliding pair but in precision machines sliding pairs are not preferred because of wear and tear. Hence in such cases different methods are used to generate straight line motion mechanisms: 1. Exact straight line motion mechanism. a. Peaucellier mechanism, b. Hart mechanism, c. Scott Russell mechanism 2. Approximate straight line motion mechanisms a. Watt mechanism, b. Grasshoppers mechanism, c. Roberts mechanism, d. Tchebicheffs mechanism a. Peaucillier mechanism : The pin Q is constrained to move long the circumference of a circle by means of the link OQ. The link OQ and the fixed link are equal in length. The pins P and Q are on opposite corners of a four bar chain which has all four links QC, CP, PB and BQ of equal length to the fixed pin A. i.e., link AB = link AC. The product AQ x AP remain constant as the link OQ rotates may be proved as follows: Join BC to bisect PQ at F; then, from the right angled triangles AFB, BFP, we have AB=AF+FB and BP=BF+FP. Subtracting, AB-BP= AF-FP=(AFFP)(AF+FP) = AQ x AP . Since AB and BP are links of a constant length, the product AQ x AP is constant. Therefore the point P traces out a straight path normal to AR. KOM/AJM/MECH/N.P.R.C.E.T Page 30
b. Roberts mechanism: This is also a four bar chain. The link PQ and RS are of equal length and the tracing pint O is rigidly attached to the link QR on a line which bisects QR at right angles. The best position for O may be found by making use of the instantaneous centre of QR. The path of O is clearly approximately horizontal in the Roberts mechanism.
a. Peaucillier mechanism
b. Hart mechanism
Oldham Coupling. Below is exploded view of an Oldham Coupling.
KOM/AJM/MECH/N.P.R.C.E.T
Page 31
An Oldham coupler is a method to transfer torque between two parallel but not collinear shafts. It has three discs, one coupled to the input, one coupled to the output, and a middle disc that is joined to the first two by tongue and groove. The tongue and groove on one side is perpendicular to the tongue and groove on the other. Often springs are used to reduce backlash of the mechanism. The coupler is much more compact than, for example, two universal joints. The coupler is named for John Oldham who invented it in Ireland, in 1820, to solve a paddle placement problem in a steamship design. The middle disc rotates around its center at the same speed as the input and output shafts. Its center traces a circular orbit, twice per rotation, around the midpoint between input and output shafts.
Unit II KINEMATICS Velocity and Acceleration analysis of mechanisms (Graphical Methods): Velocity and acceleration analysis by vector polygons: Relative velocity and accelerations of particles in a common link, relative velocity and accelerations of coincident particles on separate link, Coriolis component of acceleration. Velocity and acceleration analysis by complex numbers: Analysis of single slider crank mechanism and four bar mechanism by loop closure equations and complex numbers. 8. Displacement, velocity and acceleration analysis in simple mechanisms: Important Concepts in Velocity Analysis 1. The absolute velocity of any point on a mechanism is the velocity of that point with reference to ground. 2. Relative velocity describes how one point on a mechanism moves relative to another point on the mechanism. 3. The velocity of a point on a moving link relative to the pivot of the link is given by the equation: V = r, where = angular velocity of the link and r = distance from pivot. Acceleration Components 2 Normal Acceleration: An = r. Points toward the center of rotation Tangential Acceleration: At = r. In a direction perpendicular to the link Coriolis Acceleration: Ac = 2(dr/dt). In a direction perpendicular to the link Sliding Acceleration: As = d2r/dt2. In the direction of sliding.
KOM/AJM/MECH/N.P.R.C.E.T
Page 32
A rotating link will produce normal and tangential acceleration components at any point a distance, r, from the rotational pivot of the link. The total acceleration of that point is the vector sum of the components. A slider attached to ground experiences only sliding acceleration. A slider attached to a rotating link (such that the slider is moving in or out along the link as the link rotates) experiences all 4 components of acceleration. Perhaps the most confusing of these is the coriolis acceleration, though the concept of coriolis acceleration is fairly simple. Imagine yourself standing at the center of a merry-go-round as it spins at a constant speed (). You begin to walk toward the outer edge of the merry-go-round at a constant speed (dr/dt). Even though you are walking at a constant speed and the merry-go-round is spinning at a constant speed, your total velocity is increasing because you are moving away from the center of rotation (i.e. the edge of the merry-go-round is moving faster than the center). This is the coriolis acceleration. In what direction did your speed increase? This is the direction of the coriolis acceleration. The total acceleration of a point is the vector sum of all applicable acceleration components: A = An + At + Ac + As These vectors and the above equation can be broken into x and y components by applying sines and cosines to the vector diagrams to determine the x and y components of each vector. In this way, the x and y components of the total acceleration can be found. 9. Graphical Method, Velocity and Acceleration polygons : Graphical velocity analysis: It is a very short step (using basic trigonometry with sines and cosines) to convert the graphical results into numerical results. The basic steps are these: 1. Set up a velocity reference plane with a point of zero velocity designated. 2. Use the equation, V = r, to calculate any known linkage velocities. 3. Plot your known linkage velocities on the velocity plot. A linkage that is rotating about ground gives an absolute velocity. This is a vector that originates at the zero velocity point and runs perpendicular to the link to show the direction of motion. The vector, VA, gives the velocity of point A. 4. Plot all other velocity vector directions. A point on a grounded link (such as point B) will produce an absolute velocity vector passing through the zero velocity point and perpendicular to the link. A point on a floating link (such as B relative to point A) will produce a relative velocity vector. This vector will be perpendicular to the link AB and pass through the reference point (A) on the velocity diagram. 5. One should be able to form a closed triangle (for a 4-bar) that shows the vector equation: VB = VA + VB/A where VB = absolute velocity of point B, VA = absolute velocity of point A, and VB/A is the velocity of point B relative to point A. 10. Velocity Analysis of Four Bar Mechanisms: Problems solving in Four Bar Mechanisms and additional links.
KOM/AJM/MECH/N.P.R.C.E.T
Page 33
11. Velocity Analysis of Slider Crank Mechanisms: Problems solving in Slider Crank Mechanisms and additional links. 12. Acceleration Analysis of Four Bar Mechanisms: Problems solving in Four Bar Mechanisms and additional links. 13. Acceleration Analysis of Slider Crank Mechanisms: Problems solving in Slider Crank Mechanisms and additional links. 14. Kinematic analysis by Complex Algebra methods: Analysis of single slider crank mechanism and four bar mechanism by loop closure equations and complex numbers. 15. Vector Approach: Relative velocity and accelerations of particles in a common link, relative velocity and accelerations of coincident particles on separate link 16. Computer applications in the kinematic analysis of simple mechanisms: Computer programming for simple mechanisms 17. Coincident points, Coriolis Acceleration: Coriolis Acceleration: Ac = 2(dr/dt). In a direction perpendicular to the link. A slider attached to ground experiences only sliding acceleration. A slider attached to a rotating link (such that the slider is moving in or out along the link as the link rotates) experiences all 4 components of acceleration. Perhaps the most confusing of these is the coriolis acceleration, though the concept of coriolis acceleration is fairly simple. Imagine yourself standing at the center of a merry-go-round as it spins at a constant speed (). Yo begin to walk toward the u outer edge of the merry-go-round at a constant speed (dr/dt). Even though you are walking at a constant speed and the merry-go-round is spinning at a constant speed, your total velocity is increasing because you are moving away from the center of rotation (i.e. the edge of the merry-go-round is moving faster than the center). This is the coriolis acceleration. In what direction did your speed increase? This is the direction of the coriolis acceleration.
KOM/AJM/MECH/N.P.R.C.E.T
Page 34
Unit III KINEMATICS OF CAM Camshaft For the fictional characters of the same name, see Camshaft (Transformers).
Computer animation of a camshaft operating valves A camshaft is a shaft to which a cam is fastened or of which a cam forms an integral part. CAMPROFILE
KOM/AJM/MECH/N.P.R.C.E.T
Page 35
KOM/AJM/MECH/N.P.R.C.E.T
Page 36
Cams: Type of cams, Type of followers, Displacement, Velocity and acceleration time curves for cam profiles, Disc cam with reciprocating follower having knife edge, roller follower, Follower motions including SHM, Uniform velocity, Uniform acceleration and retardation and Cycloidal motion.
Cams are used to convert rotary motion into reciprocating motion. The motion created can be simple and regular or complex and irregular. As the cam turns, driven by the circular motion, the cam follower traces the surface of the cam transmitting its motion to the required mechanism. Cam follower design is important in the way the profile of the cam is followed. A fine pointed follower will more accurately trace the outline of the cam. This more accurate movement is at the expense of the strength of the cam follower. 18. Classifications - Displacement diagrams Cam Terminology: KOM/AJM/MECH/N.P.R.C.E.T Page 37
Physical components: Cam, follower, spring Types of cam systems: Oscilllating (rotating), translating Types of joint closure: Force closed, form closed Types of followers: Flat-faced, roller, mushroom Types of cams: radial, axial, plate (a special class of radial cams). Types of motion constraints: Critical extreme position the positions of the follower that are of primary concern are the extreme positions, with considerable freedom as to design the cam to move the follower between these positions. This is the motion constraint type that we will focus upon. Critical path motion The path by which the follower satisfies a given motion is of interest in addition to the extreme positions. This is a more difficult (and less common) design problem. Types of motion: rise, fall, dwell Geometric and Kinematic parameters: follower displacement, velocity, acceleration, and jerk; base circle; prime circle; follower radius; eccentricity; pressure angle; radius of curvature. 19. Parabolic, Simple harmonic and Cycloidal motions: Describing the motion: A cam is designed by considering the desired motion of the follower. This motion is specified through the use of SVAJ diagrams (diagrams that describe the desired displacement-velocity-acceleration and jerk of the follower motion) 20. Layout of plate cam profiles: Drawing the displacement diagrams for the different kinds of the motions and the plate cam profiles for these different motions and different followers. SHM, Uniform velocity, Uniform acceleration and retardation and Cycloidal motions Knife-edge, Roller, Flat-faced and Mushroom followers. 21. Derivatives of Follower motion: Velocity and acceleration of the followers for various types of motions. Calculation of Velocity and acceleration of the followers for various types of motions. 22. High speed cams: High speed cams 23. Circular arc and Tangent cams: Circular arc Tangent cam 24. Standard cam motion: Simple Harmonic Motion Uniform velocity motion Uniform acceleration and retardation motion Cycloidal motion 25. Pressure angle and undercutting: Pressure angle KOM/AJM/MECH/N.P.R.C.E.T Page 38
A camshaft The relationship between the rotation of the camshaft and the rotation of the crankshaft is of critical importance. Since the valves control the flow of air/fuel mixture intake and exhaust gases, they must be opened and closed at the appropriate time during the stroke of the piston. For this reason, the camshaft is connected to the crankshaft either directly, via a gear mechanism, or indirectly via a belt or chain called a timing belt or timing chain. In some designs the camshaft also drives the distributor and the oil and fuel pumps. Some General Motors vehicles also have the power steering pump driven by the camshaft. Also on early fuel injection systems, cams on the camshaft would operate the fuel injectors.
KOM/AJM/MECH/N.P.R.C.E.T
Page 39
In a two-stroke engine that uses a camshaft, each valve is opened once for each rotation of the crankshaft; in these engines, the camshaft rotates at the same rate as the crankshaft. In a four-stroke engine, the valves are opened only half as often; thus, two full rotations of the crankshaft occur for each rotation of the camshaft. The timing of the camshaft can be advanced to produce better low end torque or it can be retarded to produce better high end torque.
DurationDuration is the number of crankshaft degrees of engine rotation during which the valve is off the seat. As a generality, greater duration results in more horsepower. The RPM at which peak horsepower occurs is typically increased as duration increases at the expense of lower rpm efficiency (torque). Duration can often be confusing because manufacturers may select any lift point to advertise a camshaft's duration and sometimes will manipulate these numbers. The power and idle characteristics of a camshaft rated at .006" will be much different than one rated the same at .002". Many performance engine builders gauge a race profile's aggressiveness by looking at the duration at .020", .050" and .200". The .020" number determines how responsive the motor will be and how much low end torque the motor will make. The .050" number is used to estimate where peak power will occur, and the .200" number gives an estimate of the power potential. A secondary effect of increase duration is increasing overlap, which is the number of crankshaft degrees during which both intake and exhaust valves are off their seats. It is overlap which most affects idle quality, inasmuch as the "blow-through" of the intake charge which occurs during overlap reduces engine efficiency, and is greatest during low RPM operation. In reality, increasing a camshaft's duration typically increases the overlap event, unless one spreads lobe centers between intake and exhaust valve lobe profiles.
KOM/AJM/MECH/N.P.R.C.E.T
Page 40
LiftThe camshaft "lift" is the resultant net rise of the valve from its seat. The further the valve rises from its seat the more airflow can be realised, which is generally more beneficial. Greater lift has some limitations. Firstly, the lift is limited by the increased proximity of the valve head to the piston crown and secondly greater effort is required to move the valve's springs to higher state of compression. Increased lift can also be limited by lobe clearance in the cylinder head construction, so higher lobes may not necessarily clear the framework of the cylinder head casing. Higher valve lift can have the same effect as increased duration where valve overlap is less desirable. Higher lift allows accurate timing of airflow; although even by allowing a larger volume of air to pass in the relatively larger opening, the brevity of the typical duration with a higher lift cam results in less airflow than with a cam with lower lift but more duration, all else being equal. On forced induction motors this higher lift could yield better results than longer duration, particularly on the intake side. Notably though, higher lift has more potential problems than increased duration, in particular as valve train rpm rises which can result in more inefficient running or loss or torque. Cams that have too high a resultant valve lift, and at high rpm, can result in what is called "valve bounce", where the valve spring tension is insufficient to keep the valve following the cam at its apex. This could also be as a result of a very steep rise of the lobe and short duration, where the valve is effectively shot off the end of the cam rather than have the valve follow the cams profile. This is typically what happens on a motor over rev. This is an occasion where the engine rpm exceeds the engine maximum design speed. The valve train is typically the limiting factor in determining the maximum rpm the engine can maintain either for a prolonged period or temporarily. Sometimes an over rev can cause engine failure where the valve stems become bent as a result of colliding with the piston crowns.
PositionDepending on the location of the camshaft, the cams operate the valves either directly or through a linkage of pushrods and rockers. Direct operation involves a simpler mechanism and leads to fewer failures, but requires the camshaft to be positioned at KOM/AJM/MECH/N.P.R.C.E.T Page 41
the top of the cylinders. In the past when engines were not as reliable as today this was seen as too much bother, but in modern gasoline engines the overhead cam system, where the camshaft is on top of the cylinder head, is quite common.
Number of camshaftsMain articles: overhead valve and overhead cam While today some cheaper engines rely on a single camshaft per cylinder bank, which is known as a single overhead camshaft (SOHC), most modern engine designs (the overhead-valve or OHV engine being largely obsoleted from passenger vehicles), are driven by a two camshafts per cylinder bank arrangement (one camshaft for the intake valves and another for the exhaust valves); such camshaft arrangement is known as a double or dual overhead cam (DOHC), thus, a V engine, which has two separate cylinder banks, may have four camshafts (colloquially known as a quad-cam engine[6]). More unusual is the modern W engine (also known as a 'VV' engine to distinguish itself from the pre-war W engines) that has four cylinder banks arranged in a "W" pattern with two pairs narrowly arranged with a 15 degree separation. Even when there are four cylinder banks (that would normally require a total of eight individual camshafts), the narrow-angle design allows the use of just four camshafts in total. For the Bugatti Veyron, which has a 16 cylinder W engine configuration, all the four camshafts are driving a total of 64 valves. The overhead camshaft design adds more valvetrain components that ultimately incur in more complexity and higher manufacturing costs, but this is easily offset by many advantages over the older OHV design: multi-valve design, higher RPM limit and design freedom to better place valves, ignition (Spark-ignition engine) and intake/exhaust ports.
MaintenanceThe rockers or cam followers sometimes incorporate a mechanism to adjust and set the valve play through manual adjustment, but most modern auto engines have hydraulic lifters, eliminating the need to adjust the valve lash at regular intervals as KOM/AJM/MECH/N.P.R.C.E.T Page 42
the valvetrain wears, and in particular the valves and valve seats in the combustion chamber. Sliding friction between the surface of the cam and the cam follower which rides upon it is considerable. In order to reduce wear at this point, the cam and follower are both surface hardened, and modern lubricant motor oils contain additives specifically to reduce sliding friction. The lobes of the camshaft are usually slightly tapered, causing the cam followers or valve lifters to rotate slightly with each depression, and helping to distribute wear on the parts. The surfaces of the cam and follower are designed to "wear in" together, and therefore when either is replaced, the other should be as well to prevent excessive rapid wear. In some engines, the flat contact surfaces are replaced with rollers, which eliminate the sliding friction and wear but adds mass to the valvetrain.
AlternativesIn addition to mechanical friction, considerable force is required to overcome the valve springs used to close the engine's valves. This can amount to an estimated 25% of an engine's total output at idle, reducing overall efficiency. Some approaches to reclaiming this "wasted" energy include: Springless valves, like the desmodromic system employed today by Ducati Camless valvetrains using solenoids or magnetic systems have long been investigated by BMW and Fiat, and are currently being prototyped by Valeo and Ricardo The Wankel engine, a rotary engine which uses neither pistons nor valves, best known for being used by Mazda in the RX-7 and RX-8 sports cars.
KOM/AJM/MECH/N.P.R.C.E.T
Page 43
Gallery
Components of a typical, four stroke cycle, DOHC piston engine. (E) Exhaust camshaft, (I) Intake camshaft, (S) Spark plug, (V) Valves, (P) Piston, (R) Connecting rod, (C) Crankshaft, (W) Water jacket for coolant flow.
Double overhead cams control the opening and closing of a cylinder's valves. 1. Intake 2. Compression 3. Power 4. Exhaust
Valve timing gears on a Ford Taurus V6 engine the small gear is on the crankshaft, the larger gear is on the camshaft. The gear ratio causes the camshaft to run at half the RPM of the crankshaft.
Unit IV GEARSFor the gear-like device used to drive a roller chain, see Sprocket. This article is about mechanical gears. For other uses, see Gear (disambiguation).
Two meshing gears transmitting rotational motion. Note that the smaller gear is rotating faster. Although the larger gear is rotating less quickly, its torque is proportionally greater.
KOM/AJM/MECH/N.P.R.C.E.T
Page 44
A gear is a rotating machine part having cut teeth, or cogs, which mesh with another toothed part in order to transmit torque. Two or more gears working in tandem are called a transmission and can produce a mechanical advantage through a gear ratio and thus may be considered a simple machine. Geared devices can change the speed, magnitude, and direction of a power source. The most common situation is for a gear to mesh with another gear, however a gear can also mesh a non-rotating toothed part, called a rack, thereby producing translation instead of rotation. The gears in a transmission are analogous to the wheels in a pulley. An advantage of gears is that the teeth of a gear prevent slipping. When two gears of unequal number of teeth are combined a mechanical advantage is produced, with both the rotational speeds and the torques of the two gears differing in a simple relationship. In transmissions which offer multiple gear ratios, such as bicycles and cars, the term gear, as in first gear, refers to a gear ratio rather than an actual physical gear. The term is used to describe similar devices even when gear ratio is continuous rather than discrete, or when the device does not actually contain any gears, as in a continuously variable transmission.
Spur Gears
KOM/AJM/MECH/N.P.R.C.E.T
Page 45
Miter Gears
Helical Gears
KOM/AJM/MECH/N.P.R.C.E.T
Page 46
Miter Gears-Helical
Worm Gears
KOM/AJM/MECH/N.P.R.C.E.T
Page 47
Planetary Gears
Non-Metal Gears
GEAR TRAINS
KOM/AJM/MECH/N.P.R.C.E.T
Page 48
KOM/AJM/MECH/N.P.R.C.E.T
Page 49
KOM/AJM/MECH/N.P.R.C.E.T
Page 50
Gears are used to change speed in rotational movement.
In the example above the blue gear has eleven teeth and the orange gear has twenty five. To turn the orange gear one full turn the blue gear must turn 25/11 or 2.2727r turns. Notice that as the blue gear turns clockwise the orange gear turns anticlockwise. In the above example the number of teeth on the orange gear is not divisible by the number of teeth on the blue gear. This is deliberate. If the orange gear had thirty three teeth then every three turns of the blue gear the same teeth would mesh together which could cause excessive wear. By using none divisible numbers the same teeth mesh only every seventeen turns of the blue gear.
26. Spur gear Terminology and definitions: Spur Gears: External Internal Definitions
27. Fundamental Law of toothed gearing and Involute gearing: Law of gearing Involutometry and Characteristics of involute action KOM/AJM/MECH/N.P.R.C.E.T Page 51
Path of Contact and Arc of Contact Contact Ratio Comparison of involute and cycloidal teeth 28. Inter changeable gears, gear tooth action, Terminology: Inter changeable gears Gear tooth action Terminology 29. Interference and undercutting: Interference in involute gears Methods of avoiding interference Back lash 30. Non standard gear teeth: Helical, Bevel, Worm, Rack and Pinion gears (Basics only) Helical Bevel Worm Rack and Pinion gears Worm
Worm gear Worm gears resemble screws. A worm gear is usually meshed with an ordinary looking, disk-shaped gear, which is called the gear, wheel, or worm wheel. Worm-and-gear sets are a simple and compact way to achieve a high torque, low speed gear ratio. For example, helical gears are normally limited to gear ratios of less than 10:1 while worm-and-gear sets vary from 10:1 to 500:1.[ A disadvantage is the potential for considerable sliding action, leading to low efficiency. Worm gears can be considered a species of helical gear, but its helix angle is usually somewhat large (close to 90 degrees) and its body is usually fairly long in the axial KOM/AJM/MECH/N.P.R.C.E.T Page 52
direction; and it is these attributes which give it its screw like qualities. The distinction between a worm and a helical gear is made when at least one tooth persists for a full rotation around the helix. If this occurs, it is a 'worm'; if not, it is a 'helical gear'. A worm may have as few as one tooth. If that tooth persists for several turns around the helix, the worm will appear, superficially, to have more than one tooth, but what one in fact sees is the same tooth reappearing at intervals along the length of the worm. The usual screw nomenclature applies: a one-toothed worm is called single thread or single start; a worm with more than one tooth is called multiple thread or multiple start. The helix angle of a worm is not usually specified. Instead, the lead angle, which is equal to 90 degrees minus the helix angle, is given. In a worm-and-gear set, the worm can always drive the gear. However, if the gear attempts to drive the worm, it may or may not succeed. Particularly if the lead angle is small, the gear's teeth may simply lock against the worm's teeth, because the force component circumferential to the worm is not sufficient to overcome friction. Wormand-gear sets that do lock are called self locking, which can be used to advantage, as for instance when it is desired to set the position of a mechanism by turning the worm and then have the mechanism hold that position. An example is the machine head found on some types of stringed instruments. If the gear in a worm-and-gear set is an ordinary helical gear only a single point of contact will be achieved. If medium to high power transmission is desired, the tooth shape of the gear is modified to achieve more intimate contact by making both gears partially envelop each other. This is done by making both concave and joining them at a saddle point; this is called a cone-drive.
RACK AND PINION KOM/AJM/MECH/N.P.R.C.E.T
WORM GEAR Page 53
RACK AND PINION: The rack and pinion is used to convert between rotary and linear motion. The rack is the flat, toothed part, the pinion is the gear. Rack and pinion can convert from rotary to linear of from linear to rotary. The diameter of the gear determines the speed that the rack moves as the pinion turns. Rack and pinions are commonly used in the steering system of cars to convert the rotary motion of the steering wheel to the side to side motion in the wheels. Rack and pinion gears give a positive motion especially compared to the friction drive of a wheel in tarmac. In the rack and pinion railway a central rack between the two rails engages with a pinion on the engine allowing the train to be pulled up very steep slopes. WORM GEAR: A worm is used to reduce speed. For each complete turn of the worm shaft the gear shaft advances only one tooth of the gear. In this case, with a twelve tooth gear, the speed is reduced by a factor of twelve. Also, the axis of rotation is turned by 90 degrees. Unlike ordinary gears, the motion is not reversible, a worm can drive a gear to reduce speed but a gear cannot drive a worm to increase it. As the speed is reduced the power to the drive increases correspondingly. Worm gears are a compact, efficient means of substantially decreasing speed and increasing power. Ideal for use with small electric motors.
31. Gear trains: Gear Train Basics The velocity ratio, mV, of a gear train relates the output velocity to the input velocity. For example, a gear train ratio of 5:1 means that the output gear velocity is 5 times the input gear velocity. 32. Parallel axis gear trains: Simple Gear Trains A simple gear train is a collection of meshing gears where each gear is on its own axis. The train ratio for a simple gear train is the ratio of the number of teeth on the input gear to the number of teeth on the output gear. A simple gear train will typically have 2 or 3 gears and a gear ratio of 10:1 or less. If the train has 3 gears, the intermediate gear has no numerical effect on the train ratio except to change the direction of the output gear. Compound Gear Trains A compound gear train is a train where at least one shaft carries more than one gear. The train ratio is given by the ratio m V = (product of number of teeth on driver gears)/(product of number of teeth on driven gears). A common approach to the design of compound gear trains is to first determine the number of gear reduction steps needed (each step is typically smaller than 10:1 for size purposes). Once this is done, determine KOM/AJM/MECH/N.P.R.C.E.T Page 54
the desired ratio for each step, select a pinion size, and then calculate the gear size. Reverted Gear Trains A reverted gear train is a special case of a compound gear train. A reverted gear train has the input and output shafts in line with one another. Assuming no idler gears are used, a reverted gear train can be realized only if the number of teeth on the input side of the train adds up to the same as the number of teeth on the output side of the train. 33. Epicyclic gear trains: If the axis of the shafts over which the gears are mounted are moving relative to a fixed axis , the gear train is called the epicyclic gear train. Problems in epicyclic gear trains. 34. Differentials: Used in the rear axle of an automobile. To enable the rear wheels to revolve at different speeds when negotiating a curve. To enable the rear wheels to revolve at the same speeds when going straight. Rack and pinion
Rack and pinion gearing A rack is a toothed bar or rod that can be thought of as a sector gear with an infinitely large radius of curvature. Torque can be converted to linear force by meshing a rack with a pinion: the pinion turns; the rack moves in a straight line. Such a mechanism is used in automobiles to convert the rotation of the steering wheel into the left-to-right motion of the tie rod(s). Racks also feature in the theory of gear geometry, where, for instance, the tooth shape of an interchangeable set of gears may be specified for the rack (infinite radius), and the tooth shapes for gears of particular actual radii then derived from that. The rack and pinion gear type is employed in a rack railway.
KOM/AJM/MECH/N.P.R.C.E.T
Page 55
Epicyclic
Epicyclic gearing In epicyclic gearing one or more of the gear axes moves. Examples are sun and planet gearing (see below) and mechanical differentials. Sun and planet
Sun (yellow) and planet (red) gearing Main article: Sun and planet gear Sun and planet gearing was a method of converting reciprocal motion into rotary motion in steam engines. It played an important role in the Industrial Revolution. The Sun is yellow, the planet red, the reciprocating crank is blue, the flywheel is green and the driveshaft is grey.
KOM/AJM/MECH/N.P.R.C.E.T
Page 56
Harmonic drive
Harmonic drive gearing A harmonic drive is a specialized proprietary gearing mechanism. Cage gear A cage gear, also called a lantern gear or lantern pinion has cylindrical rods for teeth, parallel to the axle and arranged in a circle around it, much as the bars on a round bird cage or lantern. The assembly is held together by disks at either end into which the tooth rods and axle are set. Nomenclature General nomenclature
Rotational frequency, n Measured in rotation over time, such as RPM. Angular frequency, Measured in radians per second. 1RPM Number of teeth, N How many teeth a gear has, an integer. In the case of worms, it is the number of thread starts that the worm has. Gear, wheel The larger of two interacting gears. Pinion The smaller of two interacting gears. KOM/AJM/MECH/N.P.R.C.E.T Page 57
= / 30 rad/second
Path of contact Path followed by the point of contact between two meshing gear teeth. Line of action, pressure line Line along which the force between two meshing gear teeth is directed. It has the same direction as the force vector. In general, the line of action changes from moment to moment during the period of engagement of a pair of teeth. For involute gears, however, the tooth-to-tooth force is always directed along the same linethat is, the line of action is constant. This implies that for involute gears the path of contact is also a straight line, coincident with the line of actionas is indeed the case. Axis Axis of revolution of the gear; center line of the shaft. Pitch point, p Point where the line of action crosses a line joining the two gear axes. Pitch circle, pitch line Circle centered on and perpendicular to the axis, and passing through the pitch point. A predefined diametral position on the gear where the circular tooth thickness, pressure angle and helix angles are defined. Pitch diameter, d A predefined diametral position on the gear where the circular tooth thickness, pressure angle and helix angles are defined. The standard pitch diameter is a basic dimension and cannot be measured, but is a location where other measurements are made. Its value is based on the number of teeth, the normal module (or normal diametral pitch), and the helix angle. It is calculated as: in metric units or in imperial units.[15] Module, m A scaling factor used in metric gears with units in millimeters who's effect is to enlarge the gear tooth size as the module increases and reduce the size as the module decreases. Module can be defined in the normal (mn), the transverse (mt), or the axial planes (ma) depending on the design approach employed and the type of gear being designed.[15] Module is typically an input value into the gear design and is seldom calculated. Operating pitch diameters KOM/AJM/MECH/N.P.R.C.E.T Page 58
Diameters determined from the number of teeth and the center distance at which gears operate.[4] Example for pinion: Pitch surface In cylindrical gears, cylinder formed by projecting a pitch circle in the axial direction. More generally, the surface formed by the sum of all the pitch circles as one moves along the axis. For bevel gears it is a cone. Angle of action Angle with vertex at the gear center, one leg on the point where mating teeth first make contact, the other leg on the point where they disengage. Arc of action Segment of a pitch circle subtended by the angle of action. Pressure angle, The complement of the angle between the direction that the teeth exert force on each other, and the line joining the centers of the two gears. For involute gears, the teeth always exert force along the line of action, which, for involute gears, is a straight line; and thus, for involute gears, the pressure angle is constant. Outside diameter, Do Diameter of the gear, measured from the tops of the teeth. Root diameter Diameter of the gear, measured at the base of the tooth. Addendum, a Radial distance from the pitch surface to the outermost point of the tooth. a
=
(Do D) / 2Dedendum, b Radial distance from the depth of the tooth trough to the pitch surface.
b=
(D rootdiameter) / 2Whole depth, ht The distance from the top of the tooth to the root; it is equal to addendum plus dedendum or to working depth plus clearance. Clearance Distance between the root circle of a gear and the addendum circle of its mate. KOM/AJM/MECH/N.P.R.C.E.T Page 59
Working depth Depth of engagement of two gears, that is, the sum of their operating addendums. Circular pitch, p Distance from one face of a tooth to the corresponding face of an adjacent tooth on the same gear, measured along the pitch circle. Diametral pitch, pd Ratio of the number of teeth to the pitch diameter. Could be measured in teeth per inch or teeth per centimeter. Base circle In involute gears, where the tooth profile is the involute of the base circle. The radius of the base circle is somewhat smaller than that of the pitch circle. Base pitch, normal pitch, pb In involute gears, distance from one face of a tooth to the corresponding face of an adjacent tooth on the same gear, measured along the base circle. Interference Contact between teeth other than at the intended parts of their surfaces. Interchangeable set A set of gears, any of which will mate properly with any other. Helical gear nomenclature Helix angle, Angle between a tangent to the helix and the gear axis. Is zero in the limiting case of a spur gear. Normal circular pitch, pn Circular pitch in the plane normal to the teeth. Transverse circular pitch, p Circular pitch in the plane of rotation of the gear. Sometimes just called "circular pitch". pn
= pcos()
Several other helix parameters can be viewed either in the normal or transverse planes. The subscript n usually indicates the normal.
KOM/AJM/MECH/N.P.R.C.E.T
Page 60
Worm gear nomenclature Lead Distance from any point on a thread to the corresponding point on the next turn of the same thread, measured parallel to the axis. Linear pitch, p Distance from any point on a thread to the corresponding point on the adjacent thread, measured parallel to the axis. For a single-thread worm, lead and linear pitch are the same. Lead angle, Angle between a tangent to the helix and a plane perpendicular to the axis. Note that it is the complement of the helix angle which is usually given for helical gears. Pitch diameter, dw Same as described earlier in this list. Note that for a worm it is still measured in a plane perpendicular to the gear axis, not a tilted plane. Subscript w denotes the worm, subscript g denotes the gear. Tooth contact nomenclature
Line of contact
Path of action Line of action
Plane of action
Lines of contact (helical gear)
Arc of action
Length of action Limit diameter
KOM/AJM/MECH/N.P.R.C.E.T
Page 61
Face advance Zone of action Point of contact Any point at which two tooth profiles touch each other. Line of contact A line or curve along which two tooth surfaces are tangent to each other. Path of action The locus of successive contact points between a pair of gear teeth, during the phase of engagement. For conjugate gear teeth, the path of action passes through the pitch point. It is the trace of the surface of action in the plane of rotation. Line of action The path of action for involute gears. It is the straight line passing through the pitch point and tangent to both base circles. Surface of action The imaginary surface in which contact occurs between two engaging tooth surfaces. It is the summation of the paths of action in all sections of the engaging teeth. Plane of action The surface of action for involute, parallel axis gears with either spur or helical teeth. It is tangent to the base cylinders. Zone of action (contact zone) For involute, parallel-axis gears with either spur or helical teeth, is the rectangular area in the plane of action bounded by the length of action and the effective face width. Path of contact The curve on either tooth surface along which theoretical single point contact occurs during the engagement of gears with crowned tooth surfaces or gears that normally engage with only single point contact. Length of action KOM/AJM/MECH/N.P.R.C.E.T Page 62
The distance on the line of action through which the point of contact moves during the action of the tooth profile. Arc of action, Qt The arc of the pitch circle through which a tooth profile moves from the beginning to the end of contact with a mating profile. Arc of approach, Qa The arc of the pitch circle through which a tooth profile moves from its beginning of contact until the point of contact arrives at the pitch point. Arc of recess, Qr The arc of the pitch circle through which a tooth profile moves from contact at the pitch point until contact ends. Contact ratio, mc, The number of angular pitches through which a tooth surface rotates from the beginning to the end of contact.In a simple way, it can be defined as a measure of the average number of teeth in contact during the period in which a tooth comes and goes out of contact with the mating gear. Transverse contact ratio, mp, The contact ratio in a transverse plane. It is the ratio of the angle of action to the angular pitch. For involute gears it is most directly obtained as the ratio of the length of action to the base pitch. Face contact ratio, mF, The contact ratio in an axial plane, or the ratio of the face width to the axial pitch. For bevel and hypoid gears it is the ratio of face advance to circular pitch. Total contact ratio, mt, The sum of the transverse contact ratio and the face contact ratio.
= + mt = mp + mFModified contact ratio, mo For bevel gears, the square root of the sum of the squares of the transverse and face contact ratios. Limit diameter
KOM/AJM/MECH/N.P.R.C.E.T
Page 63
Diameter on a gear at which the line of action intersects the maximum (or minimum for internal pinion) addendum circle of the mating gear. This is also referred to as the start of active profile, the start of contact, the end of contact, or the end of active profile. Start of active p






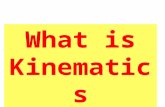

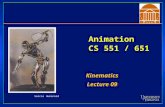



![KINEMATICS - new.excellencia.co.innew.excellencia.co.in/college/web/pdf/Kinematics-merged.pdf · KINEMATICS KINEMATICS WORKSHEET 1 1) Displacement is a _____ [ ] 1) Vector quantity](https://static.fdocuments.in/doc/165x107/5f356d4687229051801abace/kinematics-new-kinematics-kinematics-worksheet-1-1-displacement-is-a-.jpg)




