Kinematic Model and Analysis of an Actuation Redundant ...download.xuebalib.com/t8yYwPr2jT1.pdffood...
10
1590 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 62, NO. 3, MARCH 2015 Kinematic Model and Analysis of an Actuation Redundant Parallel Robot With Higher Kinematic Pairs for Jaw Movement Haiying Wen, Weiliang Xu, Senior Member, IEEE , and Ming Cong Abstract —A jaw movement robot that can simulate jaw movement and reaction forces in temporomandibular joints (TMJs) of a man will find many applications in dentistry, food science, and biomechanics. The TMJ is the most sophisticated joint in the human body, and its compound movements are not given sufficient consideration when a jaw robot is designed. Based on the biological finding about the mastication system and its motion characteristics, this paper proposes an actuation redundant parallel mechanism for the jaw movement robot and designs the actuation systems and models the TMJ in a higher pair kinematic joint. The prototype of the proposed jaw movement robot is presented, consisting of six prismatic–universal–spherical linkages for muscle groups of mastication and two point contacts for left and right TMJs. This robot has four de- grees of freedom but is driven by six actuators. Each prismatic–universal–spherical linkage is made up of a ro- tary motor, a prismatic joint, a universal joint, and a spher- ical joint. The closed-form solution to the kinematics is found. This novel robot is evaluated by simulations of kine- matics, workspace, and a chewing movement experiment. Index Terms—Actuation redundancy, chewing robot, higher kinematic pair, kinematics, parallel mechanism. I. I NTRODUCTION T HERE has been much interest in jaw movement robots applied in stomatology (training dental students, materials wear tests of artificial teeth, fatigue tests of implant denture, stress distribution in mandible, etc.), food science (evaluation of food texture properties, food chewing dynamics, etc.) and reha- bilitation of jaw motion disorder. No matter which applications the jaw movement robot is used in, it should have the capacity to reproduce the functionality for different types of mandibular movements and reaction forces in temporomandibular joints (TMJs). A jaw movement robot refers to a kind of robot, device, or simulator that can simulate some human masticatory movement [1]. Experiments have been conducted by using the jaw movement robot for a range of purposes. Manuscript received July 28, 2013; revised January 24, 2014, May 12, 2014, and July 13, 2014; accepted September 30, 2014. Date of publication October 29, 2014; date of current version February 6, 2015. This work was supported by the National High Technology Research and Development Program 863 under Grant 2013AA040303. H. Wen and M. Cong are with the School of Mechanical En- gineering, Dalian University of Technology, Dalian 116024, China (e-mail: [email protected]; [email protected]). W. Xu is with the Department of Mechanical Engineering, The University of Auckland, Auckland 1142, New Zealand (e-mail: p.xu@ auckland.ac.nz). Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/TIE.2014.2365432 Understanding and evaluating the mechanical behavior of restorative materials is important for dentists and surgeons to reestablish the teeth’s normal functions. Several different dental wear simulators have been constructed in the area of dental material study. Alemzadeh and Raabe [2] developed a dental test simulator based on the Stewart platform, which can be used for experiment of dental component material. Callegari and Marzetti [3] put forward a prismatic–universal–universal (3-PUU) parallel mechanism that can assist dentist to perform dental disease pathology research in the mandible motion situ- ation. Other representative devices are two- or three-body wear simulator [4]–[6] and MTS hydraulic simulator [7]. However, it has been shown that all of these devices do not match the human counterpart in terms of the biological structure and cannot simulate the chewing motion of the mandible and forces in TMJs during chewing. There have been a variety of devices and robots available for dental training and food science since early 1990s. The Waseda Jaw (WJ) robot series was designed to work with a WY (Waseda Yamanashi) series robot for dental training purposes [8], [9]. The WJ robots have three degrees of freedom (DOFs) of movement: open and close, right and left, and forward and backward. Hence, it is unable to reproduce real 3-D human jaw movements. Additionally, the muscle actuation system is not positioned according to the human biological structure. A more recent model for evaluating food texture properties has been designed, which has six parallel revolute-spherical-spherical (RSS) linkages each driven by a DC motor [10]. The biting force of the robot is around 250 N using upper and lower teeth to test the trajectory and force capability for different foods. In the area of biomechanics, Bowey and Burgess [11] de- signed a Mark III mastication mechanism, and Hayashi et al. [12], [13] proposed a JSN chin simulator. They simulated the muscle force direction by using stainless steel cable and ropes, respectively. Galer et al. [14] developed a mandible motion simulator that were mainly used to research dynamic load and joint degeneration of mandible. All these robots and devices have made valuable contri- butions to the jaw movement robotics and bionics. However, most of them are concentrated on the muscle system or made a simplified model of the temporomandibular joints (TMJs); thus, they are not able to reproduce human jaw motion and mechanics faithfully. TMJs are the most sophisticated joint in human body. TMJs do not move in a fixed path but actually in a narrow-band spatial envelope due to soft tissues. They consist of a pair of joints with three rotational and three translational 0278-0046 © 2014 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
-
Upload
truongnhan -
Category
Documents
-
view
214 -
download
0
Transcript of Kinematic Model and Analysis of an Actuation Redundant ...download.xuebalib.com/t8yYwPr2jT1.pdffood...

1590 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 62, NO. 3, MARCH 2015
Kinematic Model and Analysis of an ActuationRedundant Parallel Robot With Higher
Kinematic Pairs for Jaw MovementHaiying Wen, Weiliang Xu, Senior Member, IEEE , and Ming Cong
Abstract—A jaw movement robot that can simulate jawmovement and reaction forces in temporomandibular joints(TMJs) of a man will find many applications in dentistry,food science, and biomechanics. The TMJ is the mostsophisticated joint in the human body, and its compoundmovements are not given sufficient consideration when ajaw robot is designed. Based on the biological finding aboutthe mastication system and its motion characteristics, thispaper proposes an actuation redundant parallel mechanismfor the jaw movement robot and designs the actuationsystems and models the TMJ in a higher pair kinematicjoint. The prototype of the proposed jaw movement robot ispresented, consisting of six prismatic–universal–sphericallinkages for muscle groups of mastication and two pointcontacts for left and right TMJs. This robot has four de-grees of freedom but is driven by six actuators. Eachprismatic–universal–spherical linkage is made up of a ro-tary motor, a prismatic joint, a universal joint, and a spher-ical joint. The closed-form solution to the kinematics isfound. This novel robot is evaluated by simulations of kine-matics, workspace, and a chewing movement experiment.
Index Terms—Actuation redundancy, chewing robot,higher kinematic pair, kinematics, parallel mechanism.
I. INTRODUCTION
THERE has been much interest in jaw movement robotsapplied in stomatology (training dental students, materials
wear tests of artificial teeth, fatigue tests of implant denture,stress distribution in mandible, etc.), food science (evaluation offood texture properties, food chewing dynamics, etc.) and reha-bilitation of jaw motion disorder. No matter which applicationsthe jaw movement robot is used in, it should have the capacityto reproduce the functionality for different types of mandibularmovements and reaction forces in temporomandibular joints(TMJs). A jaw movement robot refers to a kind of robot,device, or simulator that can simulate some human masticatorymovement [1]. Experiments have been conducted by using thejaw movement robot for a range of purposes.
Manuscript received July 28, 2013; revised January 24, 2014, May 12,2014, and July 13, 2014; accepted September 30, 2014. Date ofpublication October 29, 2014; date of current version February 6, 2015.This work was supported by the National High Technology Researchand Development Program 863 under Grant 2013AA040303.
H. Wen and M. Cong are with the School of Mechanical En-gineering, Dalian University of Technology, Dalian 116024, China(e-mail: [email protected]; [email protected]).
W. Xu is with the Department of Mechanical Engineering, TheUniversity of Auckland, Auckland 1142, New Zealand (e-mail: [email protected]).
Color versions of one or more of the figures in this paper are availableonline at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TIE.2014.2365432
Understanding and evaluating the mechanical behavior ofrestorative materials is important for dentists and surgeons toreestablish the teeth’s normal functions. Several different dentalwear simulators have been constructed in the area of dentalmaterial study. Alemzadeh and Raabe [2] developed a dentaltest simulator based on the Stewart platform, which can beused for experiment of dental component material. Callegariand Marzetti [3] put forward a prismatic–universal–universal(3-PUU) parallel mechanism that can assist dentist to performdental disease pathology research in the mandible motion situ-ation. Other representative devices are two- or three-body wearsimulator [4]–[6] and MTS hydraulic simulator [7]. However,it has been shown that all of these devices do not match thehuman counterpart in terms of the biological structure andcannot simulate the chewing motion of the mandible and forcesin TMJs during chewing.
There have been a variety of devices and robots availablefor dental training and food science since early 1990s. TheWaseda Jaw (WJ) robot series was designed to work with a WY(Waseda Yamanashi) series robot for dental training purposes[8], [9]. The WJ robots have three degrees of freedom (DOFs)of movement: open and close, right and left, and forward andbackward. Hence, it is unable to reproduce real 3-D human jawmovements. Additionally, the muscle actuation system is notpositioned according to the human biological structure. A morerecent model for evaluating food texture properties has beendesigned, which has six parallel revolute-spherical-spherical(RSS) linkages each driven by a DC motor [10]. The bitingforce of the robot is around 250 N using upper and lower teethto test the trajectory and force capability for different foods.
In the area of biomechanics, Bowey and Burgess [11] de-signed a Mark III mastication mechanism, and Hayashi et al.[12], [13] proposed a JSN chin simulator. They simulated themuscle force direction by using stainless steel cable and ropes,respectively. Galer et al. [14] developed a mandible motionsimulator that were mainly used to research dynamic load andjoint degeneration of mandible.
All these robots and devices have made valuable contri-butions to the jaw movement robotics and bionics. However,most of them are concentrated on the muscle system or madea simplified model of the temporomandibular joints (TMJs);thus, they are not able to reproduce human jaw motion andmechanics faithfully. TMJs are the most sophisticated joint inhuman body. TMJs do not move in a fixed path but actually ina narrow-band spatial envelope due to soft tissues. They consistof a pair of joints with three rotational and three translational
0278-0046 © 2014 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.

WEN et al.: KINEMATIC MODEL AND ANALYSIS OF ACTUATION REDUNDANT PARALLEL ROBOT 1591
DOFs each. Movement restrictions are due to bones collisionand joint ligaments.
The masticatory muscles concerned with mandibular move-ments include the masseter, temporalis, lateral pterygoid, di-gastric, medial pterygoid, mylohyoid, and geniohyoid muscles.With so many muscles driving the mandible and TMJs limitingthe condyle’s trajectories, the human mastication system ismechanically redundant. The aim of this study is to proposea novel jaw robot that can simulate the mandibular movementand reaction force in the TMJs. Redundancy in a serial manip-ulator provides versatility in motion [15], whereas redundancyin parallel mechanism can reduce or eliminate singularity ofthe robot and improves the manipulability and stiffness [16],[17]. The actuation redundant parallel robots still have otheropen issues to be studied such as kinematic calibration [18],decoupled control [19], etc.
This paper proposes an actuation redundant parallel mecha-nism for jaw movement robot with higher pair kinematic joints,aiming at the multifunctional applications. The focus of thispaper is on the mechanism and kinematics of this novel parallelrobot, whereas the dynamics and reaction forces in the TMJsare not presented. The robot is modeled following a review ofthe biomechanical findings about structures of the jaw, TMJs,and muscles of mastication. In the mechanism, one prismatic–universal–spherical (PUS) linkage is used to model a musclegroup of mastication and one point-contact-higher kinematicpair to model the TMJ. This robotic mechanism has four DOFsbut is driven by six actuators. The robot is first specified tomeet human chewing behaviors in terms of kinematic require-ments and physical structures. The 6-PUS parallel mechanismis constructed, and the point-contact-higher kinematic pair isdesigned. The degree of freedom is analyzed, and the modelof kinematics is derived with attention on the higher kinematicpair. To verify the jaw movement robot able to reproducehuman jaw movement, the reachable workspace is found. Thetrajectories of two condyle points being on the articular surfacewere obtained by performing a desired mandible movement.The validation of the movement of the robot prototype throughexperiment is also presented.
II. SPECIFICATIONS OF THE ROBOT
In 3-D space, the mandible is able to move freely performingtranslations and/or rotation within a certain space. This bordermovement of incisor point (IP, located between the lowerincisors) was first described by Posselt in 1952 (see Fig. 1).The maximum opening movement is 50–60 mm, depending onthe age and size of the individual. In the initial 20–25 mm ofboth opening and closing, the mandible only rotates (segmentCR-B). Afterward, the translation of the mandible occurs, andthe condyle moves along a curved path [20], forming segmentB-E. Segment E-F represents the trajectory when the condylesare in the most anterior position. The range of the movement ofthe lower IP in horizontal movement and in lateral movement isdetermined to be 15 and 12 mm, respectively [21], [22].
Human bite force varies with several factors including indi-vidual age and gender, muscular strength, food type, tooth qual-ity, and other factors. Maximum occlusal force for the molar
Fig. 1. Maximal envelope that the lower IP can reach. (a) Cross-sectionof envelope. (b) Envelope in sagittal plane.
TABLE ISPECIFICATION OF THE JAW MOVEMENT ROBOT
region is 830 N, 445 N in the premolar area, 334 N in the cuspidregion, and 111 N in the incisor region [23]. In the naturalenvironment, the chewing activity mainly occurs in the rangebetween 0.94 and 2.17 Hz, and the mean chewing frequency is1.57 [24]. Thus, the chewing force that the robot can supply isspecified as 800 N at maximum, and opening/closing frequencyis specified as 2.17 Hz.
The specification of the jaw movement robot is listed inTable I.
III. ACTUATION REDUNDANT PARALLEL MECHANISM
The human masticatory system mainly consists of two rigidbodies, i.e., a lower jaw (mandible) and an upper jaw (maxilla).The mandible is pivoted onto the maxilla by two TMJs anddriven to perform chewing by the contraction of the muscles ofmastication under the central nervous system. The masticatorymuscles consist of several bundles of muscle groups and areattached to different area of the skull and the jaw. The lowerjaw movement in the 3-D space is mainly affected by the TMJand the muscles’ structural and dimensional parameters.
A. Linkage Modeling of Muscles of Mastication
There are jaw-opening and jaw-closing muscles in the masti-cation system. Jaw-closing muscle groups, including the tem-poralis, the masseter, and the pterygoid, need high forces tomove the mandible against the maxilla compared with the jaw-opening muscle groups [25]. The muscle insertion coordinateswere estimated, as shown in Fig. 2 [26]. Tables II and III givethe frontal and sagittal angles of the muscles and the attachmentcoordinates, respectively.
Each muscle group was modeled by a PUS linkage, as shownin Fig. 3 where P, U, and S stand for prismatic joint, sphericaljoint, universal joint, respectively. The prismatic joint is made

1592 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 62, NO. 3, MARCH 2015
Fig. 2. Actuator orientations in the frontal and sagittal planes.(1) Superficial masseter. (2) Anterior temporalis. (3) Posterior tempo-ralis. (4) Inferior lateral pterygoid. (5) Superior lateral pterygoid.
TABLE IIDETERMINED FRONTAL AND SAGITTAL ANGLES OF THE MUSCLE
TABLE IIIDETERMINED ATTACHMENT COORDINATES
up of a slider and a linear guide. A special mention is given tothe lateral pterygoid muscle. It is located in front of the condylein physiological structure, but due to the space restriction, itsmodeled mechanism was placed at the back of the condyle withthe force direction still lying along the muscle line of action.To avoid any possible singularity when the driving force isperpendicular to the sliding rail, the sagittal angle of lateralpterygoid was determined as 40.84◦.
The partial detail of the six-rod parallel mechanism is shownin Fig. 3. The driving rods were placed according to the line ofaction and insertion locations given in Tables II and III.
B. Higher Kinematic Pair for TMJ
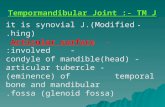
The movement of the mandible can be described by themovement of a so-called kinematic axis that links the twoTMJs’ center points [27] (see Fig. 4). The articular disk sep-arates the condyle and the temporal bone, enabling the jaw tomove along the mandibular fossa and the articular tubercle toaccomplish the rotation and translation movements.
It is difficult to simulate this human biological structurethrough rigid structure because the condyle may not slideclosely to the fossa surface as a soft tissue exists betweenthe condyle and the fossa. For the design of the jaw move-ment robot, different rigid surfaces can be used to model themandibular fossa. A different surface may produce a differentkinematic performance.
Fig. 3. Linkage of muscles of mastication. (a) Structure of threegroups of muscle inspired by biological structure. (b) One of the PUSmechanisms for the muscle group.
Fig. 4. TMJ modeling and point contact higher kinematic pair.
According to [28], the displacement of the condyle point canbe approximated by two portions: a linear portion (portion 1)and a nonlinear portion (portion 2), as shown in Fig. 5. Fivecharacteristic points of the displacement and the tilt angle ofthe linear portion are given in Table IV. The displacementtrajectory of the condyle point can be described by the cubicpolynomial in the following:
Z = 0.0052X3 − 0.072X2 − 0.3837X. (1)
The condyle center trajectory was taken from [28], and thecondyle movements of the actual robot refer to the experimentalresults in Figs. 12 and 13.

WEN et al.: KINEMATIC MODEL AND ANALYSIS OF ACTUATION REDUNDANT PARALLEL ROBOT 1593
Fig. 5. Trajectory of the condyle center.
TABLE IVCHARACTERISTIC POINTS DATA OF POINT C TRAJECTORY
In order to simulate TMJ in biologically faithful fashion,in this paper, as a specific case, a sweeping surface of thecubic polynomial curve was chosen as the mandibular fossa andarticular tubercle surface for the condyle point to move along,as shown in Fig. 4. As shown in the little circle colored in blue,the higher kinematic pair is formed by the condylar point mov-ing on the surface representing the mandibular fossa socket.The condyle rod goes along the articular surface freely, andconsequently, for one higher kinematic pair case, the condylecan rotate about any axis through the contact point while slidein any direction in the tangent plane.
C. Actuation Redundant Parallel Mechanism forJaw Movement
The aforementioned modeling of the muscles and TMJsresults in an actuation redundant parallel mechanism. It consistsof a movable plate and a ground plate that are constrained bytwo higher kinematic pairs and driven by 6-PUS linkages. Themovable plate represents the mandible (or lower jaw), and theground plate represents the skull (or upper jaw). Fig. 6 showsthe prototype of the jaw movement robot.
The number of the DOFs of the parallel mechanism can beevaluated using the Kutzbach criterion [29], i.e.,
m = 6(n− 1)− 5j1 − 4j2 − 3j3 − 2j4 − j5 (2)
where m is the number of the DOFs, n(= 14) is the numberof links, and ji is the number of a joint that has i degrees offreedom, with j1 = 6 for P joints, j2 = 6 for U joints, j3 = 6for S joints, and j4 = 0, j5 = 2 for higher kinematic pair,respectively. The number of the DOFs is four, which impliesthe proposed mechanism is an actuation redundant parallelmechanism.
Fig. 6. Prototype of the jaw movement robot.
Fig. 7. Four DOFs of the jaw movement robot.
D. Independent Jaw Movement
Assume that S1 and S2 are the two TMJ articular surfaces andthe ball end of the condyle IP1 be constrained by S1 and IP2 byS2, as shown in Fig. 7. The little circle represents the condylethat goes along the condylar surface. In order to describe themovement clearly, three reference frames were built. Globalreference frame OB −XBYBZB (or ΣB) was established onthe base (or the skull). Instantaneous frame OI −XIYIZI
(or ΣI ) was placed at the midpoint of the kinematic axis,which moves with the mandible. The mandible frame OM −XMYMZM (or ΣM ) was fixed at the same position as ΣI whenthe teeth are in occlusion, which means the initial position ofΣM and ΣI are identical. The frame ΣB is directly beneath theframe ΣM . Frame ΣI is a body frame that can be transformedfrom ΣM through homogeneous transformation matrices.
When the mandible moves from {M0} to {MI}, a plane Pthat is determined by the slopes of the two articular surfacesand passes through the line IP I
1 P2 can always be found at everymoment. The four DOFs of motion in an instantaneous timeare translation WTI with direction perpendicular to IP I
1 P2 inplane P, rotation δRI about an axis through the midpoint ofIP I
1 P2 and perpendicular to plane P, translation YTI alongIP I
1 P2 and rotation βRI about IP I1 P2.

1594 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 62, NO. 3, MARCH 2015
Considering the convenience of operation, the mandible’s mo-tion can be described by six parameters (XI , YI , ZI , αI , βI , γI)with respect to static frame ΣM , in which αI , βI , γI are Eulerangles that are described by a roll–pitch–yaw sequence and XI ,YI , ZI are the translation of OI . The angles αI and γI arecorrelated, and the translations XI and ZI are correlated dueto the two articular surfaces. It means that, if XI and αI (or γI )are given, ZI and γI (or αI ) can be obtained and vice versa,and if ZI and αI (or γI ) are given, XI and γI (or αI ) can beobtained. Subsequently, four parameters (e.g., XI , YI , βI , γI )can be chosen as the four DOFs of the mandible.
IV. KINEMATICS OF THE JAW MOVEMENT ROBOT
A. Relationship of Kinematic Parameters
Suppose XI , YI , βI , and γI are given, to know the remainingtwo parameters Zi and αI , MTI is needed, where MTI [30]expresses the transformation matrix from {M0} to {MI} (see(3), at the bottom of the page), where c stands for cos and sdoes for sin.
MRI can be expressed independently by 2 angles βI and γI ,as shown by the second equation at the bottom of the page.Moreover, we have
MOI = [XI YI ZI ]T (4)
in which XI and YI are given.From Fig. 7, the length of ‖IP1
IP2‖ is constant. Points IP1
and IP2 are on surface S1 and S2; thus,
‖IP1IP2‖ = L (5)
OI = 1/2× (IP1 +IP2) (6)
where IP1 = MP1 · MTI = [x1 y1 z1]T , IP2 = MP2 ·
MTI = [x2 y2 z2]T , and the coordinates of MP1 and MP2 are
known when the mandible is at the teeth occlusion. L is theconstant length between two contact points. OI = MOI .
S1 and S2 are expressed as
F1(x1, y1, z1) = 0 F2(x2, y2, z2) = 0. (7)
Combining (5)–(7), ZI and αI can be found. Therefore,MTI is obtained. IP1 and IP2 are the coordinates of positionsof the two contact points, and then the trajectories of the twocontact points are obtained.
Conversely, if the coordinates of points IP1 and IP2 withreference to points MP1 and MP2 are given, MTI can alsobe found. According to the homogeneous transformation, thefourth column of matrix MTI is the relative position of originOI with respect to frame ΣM , i.e., then
MOI = 1/2× (IP1 +IP2) (8)
where XI , YI , ZI can be obtained.The angles αI , βI , γI can be calculated by
IP2 = MTI · MP2. (9)
B. Inverse Kinematics
Given the mandibular movement, defined by XI , YI , βI , γI ,the inverse kinematics is to find the length changes Qi (i = 1,2, . . . , 6) of the six actuated legs.
The mandible frame ΣM relative to the global frame ΣB
can be determined by way of a transform matrix BTM [30]as shown in (10) at the bottom of the page.
One leg of the PUS linkage of the robot is shown in Fig. 8,where the prismatic joint is located at Ci, and it translatesvertically with respect to the fixed position at Bi.
On one hand, the vector BiMi can be written as
BiMi =BiOb +ObOm +OmMi (11)
BiMi = −
⎡⎣Bix
Biy
Biz
⎤⎦+
⎡⎣
BMixBMiyBMiz
⎤⎦ (12)
BMi =BTM · MMi (13)
MTI =
[MRI
MOI
0, 0, 0 1
]4×4
⎡⎢⎣
cγIcβI −sγI · cαI + cγI · sβI · sαI sγI · sαI + cγI · sβI · cαI XI
sγI · cβI cγI · cαI + sγI · sβI · sαI −cγI · sαI + sγI · sβI · cαI YI
−sβI cβI · sαI cβI · cαI ZI
0 0 0 1
⎤⎥⎦ (3)
MRI =
⎡⎣ cγIcβI −sγI · cαI + cγI · sβI · sαI sγI · sαI + cγI · sβI · cαI
sγI · cβI cγI · cαI + sγI · sβI · sαI −cγI · sαI + sγI · sβI · cαI
−sβI cβI · sαI cβI · cαI
⎤⎦
BTM =
⎡⎢⎣
cγcβ −sγ · cα+ cγ · sβ · sα sγ · sα+ cγ · sβ · cα Xsγ · cβ cγ · cα+ sγ · sβ · sα −cγ · sα+ sγ · sβ · cα Y−sβ cβ · sα cβ · cα Z0 0 0 1
⎤⎥⎦ (10)

WEN et al.: KINEMATIC MODEL AND ANALYSIS OF ACTUATION REDUNDANT PARALLEL ROBOT 1595
Fig. 8. PUS linkage leg of the robot.
TABLE VPARAMETERS OF THE ROBOT
where MMi and BMi are the coordinates of the point Mi inthe frame ΣM and in frame ΣB , respectively.
On the other hand, the vector BiMi can also be expressed as
BiMi = BiCi +CiMi (14)
which can be rewritten as
CiMi = BiMi −BiCi. (15)
The squares of (15) yields
‖CiMi‖2 = ‖BiMi‖2 − 2BiMi ·BiCi + ‖BiCi‖2 (16)
in which BiCi=Qi · [0, 0, 1]T . ‖CiMi‖=Li (i=1, 2, . . . , 6)is the length of each rod (see Table V), and BiMi can becalculated by (12). Define
‖BiMi‖2 =R2i (17)
BiMi · e =Si. (18)
Then, BiMi ·BiCi can be written as
BiMi ·BiCi = BiMi · e ·Qi = Si ·Qi. (19)
Combining (16), (17), and (19) yields
Q2i − 2 · Si ·Qi +R2
i − L2i = 0. (20)
Eventually, each leg variation of the prismatic joint is found,i.e.,
Qi = Si ±√
S2i −R2
i + L2i . (21)
C. Workspace Analysis
The workspace of the robot is restrained by the articularsurface and the 6-PUS linkages. In order to make it look moreintuitive, the envelope of IP was given. The parameters of themechanism needed for the workspace are listed in Table V andgiven in Section III.
Fig. 9. Relation of rotation αI and γI by constrained surface.
TABLE VIMAXIMUM REACHABLE ORIENTATION AND POSITION
OF OI OF THE JAW MOVEMENT ROBOT
Fig. 10. Envelope of IP viewed in (a) sagittal plane and (b) frontalplane.
The higher kinematic joint contains a rigid surface that con-strains the motion of the mandible. Taking the cubic polynomialsurface mentioned in Section III as the studying case, it canbe found that the moving frame ΣM travels closely along thesurface. Subsequently, the translation workspace of point OI islocated around the rigid surface. Meanwhile, rotation αI and γIare closely correlated. Fig. 9 shows the relation of rotation αI
and γI through the motion, keeping one contact point go alongthe rigid surface for 15 mm in x-axis, while the other one staysstill. Table VI summarizes the maximum reachable orientationand position of OI of the robot. All the coordinates are givenwith respect to the frame ΣM .
In order to verify the suitability compared with target jawspecifications (see Fig. 1 and Table I), the border movementof IP was obtained, as shown in Fig. 10. Horizontal, lateral,and vertical displacements of IP are 15, 30, and 50 mm,respectively. The reachable workspace is enough for the robotto reproduce the movement specified by the trajectory of IP.

1596 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 62, NO. 3, MARCH 2015
Fig. 11. Desired mandible movement described by the IP as the inputof the robot. (a) Trajectory in XM -axis. (b) Trajectory in YM -axis. (c)Trajectory in ZM -axis. (d) Rotation γ about ZM -axis.
V. TRAJECTORY EVALUATION AND EXPERIMENT
The validation of the robot was performed by simulating thetrajectory of the two condyle points and performing chewingmovement experiment when a mandible motion trajectory wasgiven. The purpose of the experiment was to test if the robotcould follow a real masticatory movement. Fig. 11 shows adesired mandible movement, which is described by the dis-placements of the lower IP (three DOFs) and the rotation γof the mandible about ZM -axis (one DOF). Compared withFig. 10, it is found that the movement is within the workspaceof the robot.
The movement of the two condyle points was obtainedthrough the kinematic analysis. The trajectories of the twocondylar points are shown in Figs. 12 and 13, where thecoordinate system is the frame ΣM . The left one is a smallcircle, and the right one is a curve on the articular surfaces.If the lateral yawing motion of the mandible reverses, the tra-jectories of the two condyle points would be switched with oneanother.
The experiment is to test the robot functional movement byfollowing the desired masticatory movement (see Fig. 11). Thedynamic control method for actuation redundant parallel robotcan realize smooth motion with high speed. At this stage, this
Fig. 12. Trajectory of the left condyle point on articular surface.
Fig. 13. Trajectory of the right condyle point on articular surface.
paper mainly concerned about the kinematic control method.Therefore, the motion process of the robot is assumed quasi-static, and the velocity is slow.
Given the above mandibular movement, the kinematic wasused to solve the individual displacement of each of thesix sliders required for the robot to follow the movement.The control system consists of a PC and a motion controller(Model PEC-6A00). The PC sends the target position to themotion controller, in a time interval of 2 ms. The displacementsand velocities required for the robot to reproduce the desiredmandible movement are obtained from the motion controller.The lead of the screw is 5 mm, and 10 000 pulses are neededfor the servo motor to complete one rotation. Figs. 14 and 15show the first four cycles of the actuators’ displacements andvelocities. It is shown in Figs. 14 and 15 that the maximumdisplacement of the slider is at the left masseter of about32.32 mm, and the maximum velocity happens to the righttemporalis at a speed of 138.59 mm/s. The robot built canrealize this design requirement.
We took a series of photos of the mandible movement (withFig. 16 being at an instant) showing qualitatively that the ex-perimental movements of the condyles are in a good agreementwith the simulated ones (see Fig. 12 and 13) and the trajectoryof the IP is within the Posselt envelope (Fig. 1).

WEN et al.: KINEMATIC MODEL AND ANALYSIS OF ACTUATION REDUNDANT PARALLEL ROBOT 1597
Fig. 14. Displacement of the six motors corresponding to the desiredmandible motion.
Fig. 15. Velocity of the six motors corresponding to the desiredmandible motion.
Fig. 16. Experimental mandible movement of the robot in (a) frontalplane and (b) sagittal plane.
VI. CONCLUSION
The actuation redundant jaw movement robot was modeledin a 6-PUS parallel mechanism, based on the biological findingabout mastication system and its motion characteristics. Themechanism was specified in terms of six muscle groups of mas-
tication and the higher kinematic pair joints for the two TMJs.The kinematics was derived. To verify the proposed robot,its reachable workspace was found, and a desired mandiblemovement was simulated where two condyle point trajectorieswere obtained accordingly. The chewing movement experimentusing the kinematic control method was performed. It has beenfound that the proposed actuation redundant jaw movementrobot is able to reach the workspace required and reproducethe mandible movements.
The actuation redundant parallel mechanism proposed couldsimulate the human jaw motion and the reaction forces inthe two TMJs. The mastication system itself is biologicallyredundant due to the TMJs and muscles of mastication. Theactuation redundancy can deliver a large force at the teeth whilethe robot has a compact mechanism. Nevertheless, the actuationredundancy makes the design and manufacture of the robot verychallenging, particularly with the higher kinematic pair for thetwo TMJs. The proposed actuation redundant robot is the first ofthis kind in the world. Its dynamics control and optimal motortorque distribution will be studied, and more experiments willbe carried out during the next stage of the project.
ACKNOWLEDGMENT
H. Wen would like to thank the China Scholarship Coun-cil for his doctoral scholarship and the Department of Me-chanical Engineering, The University of Auckland, Auckland,New Zealand, for his tenure from September 2012 toSeptember 2013.
REFERENCES
[1] W. L. Xu and J. E. Bronlund, Mastication Robots. Berlin, Germany:Springer-Verlag, 2010.
[2] K. Alemzadeh and D. Raabe, “Prototyping artificial jaws for the bristolDento-Munch Robo-Simulator,” in Proc. 29th IEEE Annu. Int. Conf.EMBS, Lyon, France, 2007, pp. 1453–1456.
[3] M. Callegari and P. Marzetti, “Proposal of a mechatronic system for read-ing and analysis of jaw movements and denture testing,” in Healthcare,Med. Robots Rehabil., 2004, pp. 165–171.
[4] X. Hu, P. M. Marquis, and A. C. Shortall, “Two-body in vitro wearstudyof some current dental composites and amalgams,” J. Prosthet. Dental,vol. 82, no. 2, pp. 214–220, 1999.
[5] A. J. de Gee and P. Pallav, “Occlusal wear simulation with the ACTA wearmachine,” J. Dentistry, vol. 22, pp. S21–S27, 1994.
[6] P. Pallav, A. J. De Gee, C. L. Davidson, R. L. Erickson, andE. A. Glasspoole, “The influence of admixing microfiller to small-particlecomposite resin on wear, tensile strength, hardness, surface roughness,”J. Dental Res., vol. 68, no. 3, pp. 489–490, Mar. 1989.
[7] R. DeLong and W. H. Douglas, “An artificial oral environment for testingdental materials,” IEEE Trans. Biomed. Eng., vol. 38, no. 4, pp. 339–345,Apr. 1991.
[8] H. Takanobu et al., “Integrated dental robot system for mouth opening andclosing training,” in Proc. IEEE Int. Conf. Robot. Autom., Washington,DC, USA, May 2002, pp. 1428–1433.
[9] H. Takanobu and A. Takanishi, “Dental robotics and human model,”in Proc. 1st Int. IEEE EMBS Conf. Neural Eng., Capri Island, Italy,May 20–22, 2003, pp. 671–674.
[10] W. L. Xu et al., “Kinematics and experiments of a life-sized masticatoryrobot for characterizing food texture,” IEEE Trans. Ind. Electron., vol. 55,no. 5, pp. 2121–2132, May 2008.
[11] C. Bowey and D. Burgess, “Robotic temporomandibular joint,” Univ.Adelaide, Adelaide, Australia, Final Year Project Rep., p. 99, 2005.
[12] T. Hayashi, S. Tanaka, and S. Nakajima, “Control mechanism of anautonomous jaw-movement simulator JSN/1C during open-close move-ment,” in Proc. 18th IEEE Annu. Int. Conf., Amsterdam, The Netherlands,Oct. 31–Nov. 1, 1996, pp. 613–614.

1598 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 62, NO. 3, MARCH 2015
[13] T. Hayashi, S. Kato, and S. Yamada, “A physiological control of chewing-like jaw movement for robotized jaw simulator JSN/2A,” in Proc. IEEEEMBS Int. Conf., Chicago, IL, USA, Jul. 23–28, 2000, pp. 730–731.
[14] B. Galer, N. Hockenberry, and J. Maloof, “Human Jaw Motion Simu-lator,” M.S. thesis, Dept. Mech., Ind. Manuf. Eng., Northeastern Univ.,Boston, MA, USA, 2007.
[15] L. Zhou and G. Cook, “Path planning for robotic manipulators with re-dundant degrees of freedom,” IEEE Trans. Ind. Electron., vol. 38, no. 6,pp. 413–420, Dec. 1991.
[16] J. P. Merlet, “Structural synthesis and architectures,” in Parallel Robots.Dordrecht, The Netherlands: Springer-Verlag, 2006, pp. 19–93.
[17] B. Nemec and L. Zlajpah, “Force control of redundant robots in unstruc-tured environment,” IEEE Trans. Ind. Electron., vol. 49, no. 1, pp. 233–240, Feb. 2002.
[18] D. Zhang and Z. Gao, “Optimal kinematic calibration of parallel manipu-lators with pseudo error theory and cooperative coevolutionary network,”IEEE Trans. Ind. Electron., vol. 59, no. 8, pp. 3221–3231, Aug. 2012.
[19] C. Yang, Z. Qu, and J. Han, “Decoupled-space control and experimentalevaluation of spatial electrohydraulic robotic manipulators using singularvalue decomposition algorithms,” IEEE Trans. Ind. Electron., vol. 61,no. 7, pp. 3427–3438, Jul. 2014.
[20] E. Bando et al., “Current status of researches on jaw movement andcclusion for clinical application,” Jpn. Dental Sci. Rev., vol. 45, no. 2,pp. 83–97, Sep. 2009.
[21] C. Sun, W. L. Wu, J. E. Bronlund, and M. Morgenstern, “Dynamics andcompliance control of a linkage robot for food chewing,” IEEE Trans. Ind.Electron., vol. 61, no. 1, pp. 377–386, Jan. 2014.
[22] T. Ogawa, M. Ogawa, and K. Koyano, “Different responses of mastica-tory movements after alteration of occlusal guidance related to individ-ual movement pattern,” J. Oral Rehabil., vol. 28, no. 9, pp. 830–841,Sep. 2001.
[23] K. J. Anusavice, “Mechanical properties of dental materials,” inPhilips’ Science of Dental Materials, 11th ed. St. Louis, MO, USA:Elsevier, 2003, pp. 73–100.
[24] J. M. Po et al., “Time-frequency analysis of chewing activity in the naturalenvironment,” J. Dental Res., vol. 90, no. 10, pp. 1206–1210, Oct. 2011.
[25] J. H. Koolstra and T. M. van Eijden, “Dynamics of the human masticatorymuscles during a jaw open-close movement,” J. Biomech., vol. 30, no. 9,pp. 883–889, Sep. 1997.
[26] W. L. Xu, J. S. Pap, and J. Bronlund, “Design of a biologically inspiredparallel robot for foods chewing,” IEEE Trans. Ind. Electron., vol. 55,no. 2, pp. 832–841, Feb. 2008.
[27] H. Takanobu, A. Takanishi, and I. Kato, “Design of a mastication robotusing a human skull model,” in Proc. IEEE/RSJ Int. Conf. Intell. RobotsSyst., Yokohama, Japan, Jul. 26–30, 1993, pp. 203–208.
[28] J. C. Coutant, B. Ella Nguema, and M. Mesnard, “Temporo mandibu-lar joint Kinematic: The specificity of the rotatory component involvedin Disc-Condyle displacements along the temporal bone surface,” inProc. 5th Eur. IFMBE Conf., Budapest, Hungary, Sep. 14–18, 2011,pp. 799–802.
[29] J. J. Uicker, G. R. Pennock, and J. E. Shigley, “Kinematics and mecha-nisms,” in Theory of Machines and Mechanisms. New York, NY, USA:Oxford Univ. Press, 2003.
[30] J. J. Craig, Introduction to Robotics: Mechanics and Control, 3rd ed.Upper Saddle River, NJ, USA: Pearson Education International, 2005.
Haiying Wen received the B.E. degree in me-chanical design and automation from ShandongUniversity, Jinan, China, in 2008 and the M.E.degree in mechanical engineering from DalianUniversity of Technology, Dalian, China, in 2011.He is currently working toward the Ph.D. degreeat the School of Mechanical Engineering, DalianUniversity of Technology.
His current research interests include chew-ing robotics and control and parallel robots.
Weiliang Xu (SM’99) received the B.E. degreein manufacturing engineering and the M.E. de-gree in mechanical engineering from SoutheastUniversity, Nanjing, China, in 1982 and 1985,respectively, and the Ph.D. degree in mecha-tronics and robotics from Beijing University ofAeronautics and Astronautics, Beijing, China,in 1988.
He was with the City University of Hong Kong,Hong Kong; University of Stuttgart, Stuttgart,Germany; and Southeast University. In 1999,
he joined Massey University, Palmerston North, New Zealand, wherehe served as a Senior Lecturer (1999–2004), an Associate Pro-fessor, (2005–2006), and a Professor of Mechatronics (2007–2010).Since 2011, he has been with The University of Auckland, Auckland,New Zealand, where he is currently the Chair in Mechatronics Engi-neering. His current research interests include advanced mechatron-ics/robotics with applications in medicine and food.
Dr. Xu has served as an Associate Editor for the IEEE TRANSAC-TIONS ON INDUSTRIAL ELECTRONICS since 2003. He was an AssociateEditor for the IEEE Robotics and Automation Magazine from 2008 to2009, and an Editor for the International Journal of Intelligent SystemsTechnologies and Applications from 2005 to 2010. He is a Fellow of theInstitution of Professional Engineers New Zealand.
Ming Cong received the Ph.D. degree fromShanghai Jiaotong University, Shanghai, China,in 1995.
Since 2003, he has been a faculty mem-ber with the School of Mechanical Engineering,Dalian University of Technology, Dalian, China.He was an Outstanding Expert enjoying specialgovernment allowances approved by the StateCouncil, an advanced worker of intelligent robotthemes in the field of automation by NationalHigh Technology Research and Development
Program (863), and a member of the industrial robot expert group of thefifth intelligent robot theme for the 863 program. His research interestsinclude robotics and automation, biomimetic robots, and intelligentcontrol.

本文献由“学霸图书馆-文献云下载”收集自网络,仅供学习交流使用。
学霸图书馆(www.xuebalib.com)是一个“整合众多图书馆数据库资源,
提供一站式文献检索和下载服务”的24 小时在线不限IP
图书馆。
图书馆致力于便利、促进学习与科研,提供最强文献下载服务。
图书馆导航:
图书馆首页 文献云下载 图书馆入口 外文数据库大全 疑难文献辅助工具


















