
Kernel-Induced Feature Spaces - University of Iceland · Kernel-Induced Feature Spaces Chapter3...
79
Kernel-Induced Feature Spaces Chapter 3 March 6, 2003 T.P. Runarsson ([email protected]) and S. Sigurdsson ([email protected])
-
Upload
nguyenmien -
Category
Documents
-
view
224 -
download
0
Transcript of Kernel-Induced Feature Spaces - University of Iceland · Kernel-Induced Feature Spaces Chapter3...

Kernel-Induced Feature Spaces
Chapter 3
March 6, 2003
T.P. Runarsson ([email protected]) and S. Sigurdsson ([email protected])

March 6, 2003
Kernel representation
• Complex real-world applications require more expressive
hypothesis spaces than linear functions (ie. cannot be
expressed as a simple linear combinations of input attributes).
• This limitation was pointed out by Minsky and Papert in the1960s and led to the proposal of multi layered neural networks.
• Kernel representations offer an alternative solution by
projecting the input attributes into a high dimensional feature
space, thus increasing the computational power of the linear
learning machines discussed so far.
• The kernel method allows the decoupling of the learningalgorithm and theory from the design of an appropriate kernel
for a specific application area.
1
March 6, 2003
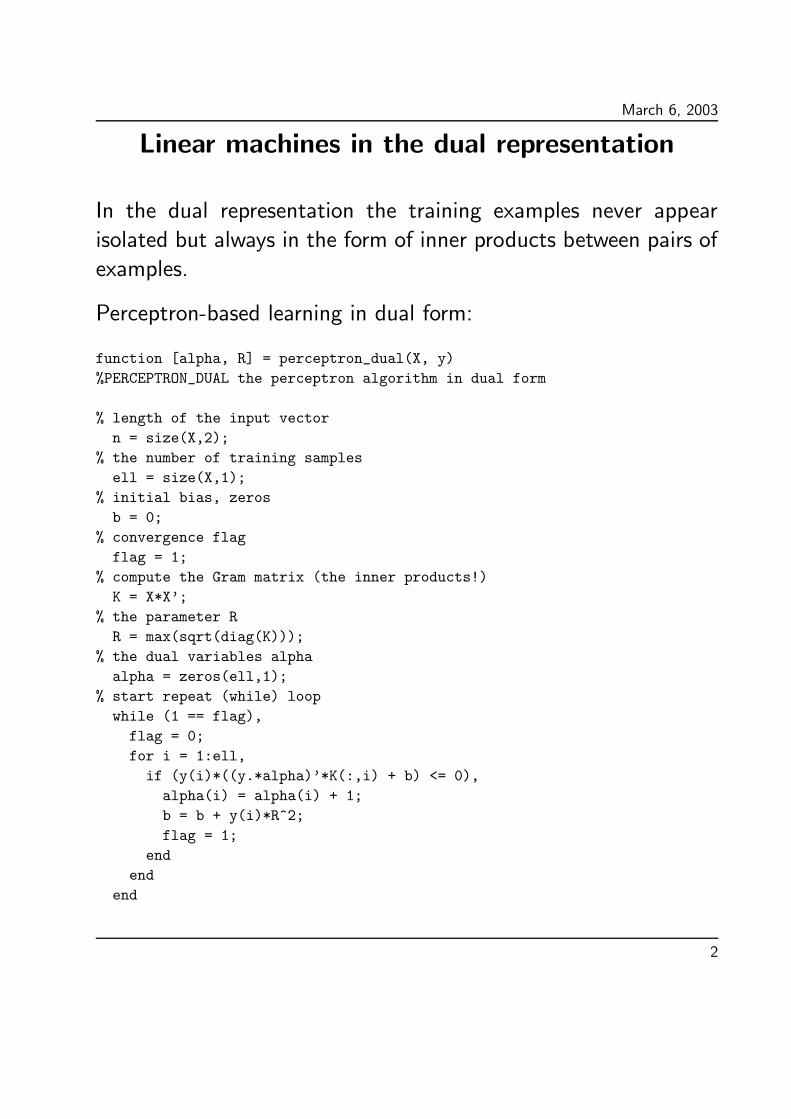
Linear machines in the dual representation
In the dual representation the training examples never appear
isolated but always in the form of inner products between pairs of
examples.
Perceptron-based learning in dual form:
function [alpha, R] = perceptron_dual(X, y)
%PERCEPTRON_DUAL the perceptron algorithm in dual form
% length of the input vector
n = size(X,2);
% the number of training samples
ell = size(X,1);
% initial bias, zeros
b = 0;
% convergence flag
flag = 1;
% compute the Gram matrix (the inner products!)
K = X*X’;
% the parameter R
R = max(sqrt(diag(K)));
% the dual variables alpha
alpha = zeros(ell,1);
% start repeat (while) loop
while (1 == flag),
flag = 0;
for i = 1:ell,
if (y(i)*((y.*alpha)’*K(:,i) + b) <= 0),
alpha(i) = alpha(i) + 1;
b = b + y(i)*R^2;
flag = 1;
end
end
end
2
March 6, 2003
Learning in feature space
• The complexity of the target function to be learned dependson the way it is represented,
• ideally a representation that matches the specific learningproblem should be chosen,
• and so it is not uncommon in machine learning to change therepresentation of the data:
x = (x1, . . . , xn) 7→ φ(x) = (φ1(x), . . . , φN(x))
where n is the dimension of the inputs (attributes) and N is
the dimension of the features.
Attributes are the original quantities x ∈ X.
Features are the quantities introduced to describe the data.
Feature selection is the task of choosing the most suitable
representation.
Feature space is the new space F = {φ(x)|x ∈ X}.
3
March 6, 2003
Feature selection
Motivation:
• To improve generalization error,• for explanatory purposes determine the relevant features,• and reduce the dimensionality of the input space (for real-timeapplications).
Good feature selection requires domain knowledge (“insight”), for
example what would be a good feature for say:
• a pixel image,• text document,• a living creature,• the stock market,• some physical phenomenon (Newton’s law of gravity),• . . . ?
4
March 6, 2003
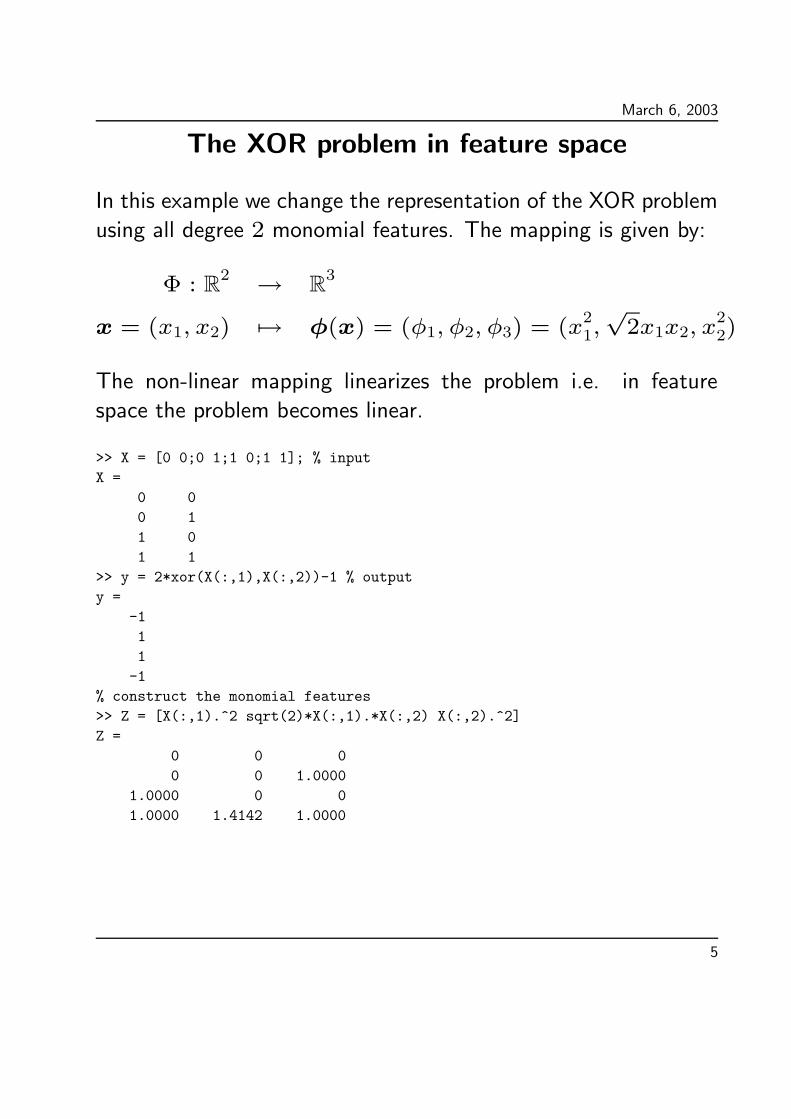
The XOR problem in feature space
In this example we change the representation of the XOR problem
using all degree 2 monomial features. The mapping is given by:
Φ : R2 → R3
x = (x1, x2) 7→ φ(x) = (φ1, φ2, φ3) = (x21,√2x1x2, x
22)
The non-linear mapping linearizes the problem i.e. in feature
space the problem becomes linear.
>> X = [0 0;0 1;1 0;1 1]; % input
X =
0 0
0 1
1 0
1 1
>> y = 2*xor(X(:,1),X(:,2))-1 % output
y =
-1
1
1
-1
% construct the monomial features
>> Z = [X(:,1).^2 sqrt(2)*X(:,1).*X(:,2) X(:,2).^2]
Z =
0 0 0
0 0 1.0000
1.0000 0 0
1.0000 1.4142 1.0000
5

March 6, 2003
% let’s just use the above perceptron algorithm
>> [alpha, R] = perceptron_dual(Z,y)
alpha =
17
11
11
6
R =
2
>> b = alpha’*(y*R^2)
b =
-4
>> w = (alpha.*y)’*Z
w =
5.0000 -8.4853 5.0000
% note that the problem is 3-dimensional
>> w*Z’+b
ans =
-4.0000 1.0000 1.0000 -6.0000
>> sign(w*Z’+b)
ans =
-1 1 1 -1
6

March 6, 2003
The separating hyperplane in feature space
−0.50
0.51
−0.50
0.51
−0.5
0
0.5
1
φ1φ
2
φ 3
The plane (w, b) = ((5,−8.4853, 5),−2) separating the XORtask linearly in feature space.
7

March 6, 2003
The implicit mapping into feature space
Consider the monomial features mapping:
Φ : Rn → RN
For different monomials of degree d the dimension of the feature
space is:(d+ n− 1
d
)
=(d+ n− 1)!
d!(n− 1)!and so it becomes very quickly intractable to work directly in
feature space.
There exists, however, a way of computing dot products in these
high-dimensional feature spaces without explicitly mapping into
the spaces. This is done by means of kernels nonlinear in the
input space X.
A kernel is a function K, such that for all x, z ∈ X
K(x, z) =⟨
φ(x) · φ(z)⟩
where φ is a mapping fromX to an (inner product) feature space
F .
8
March 6, 2003
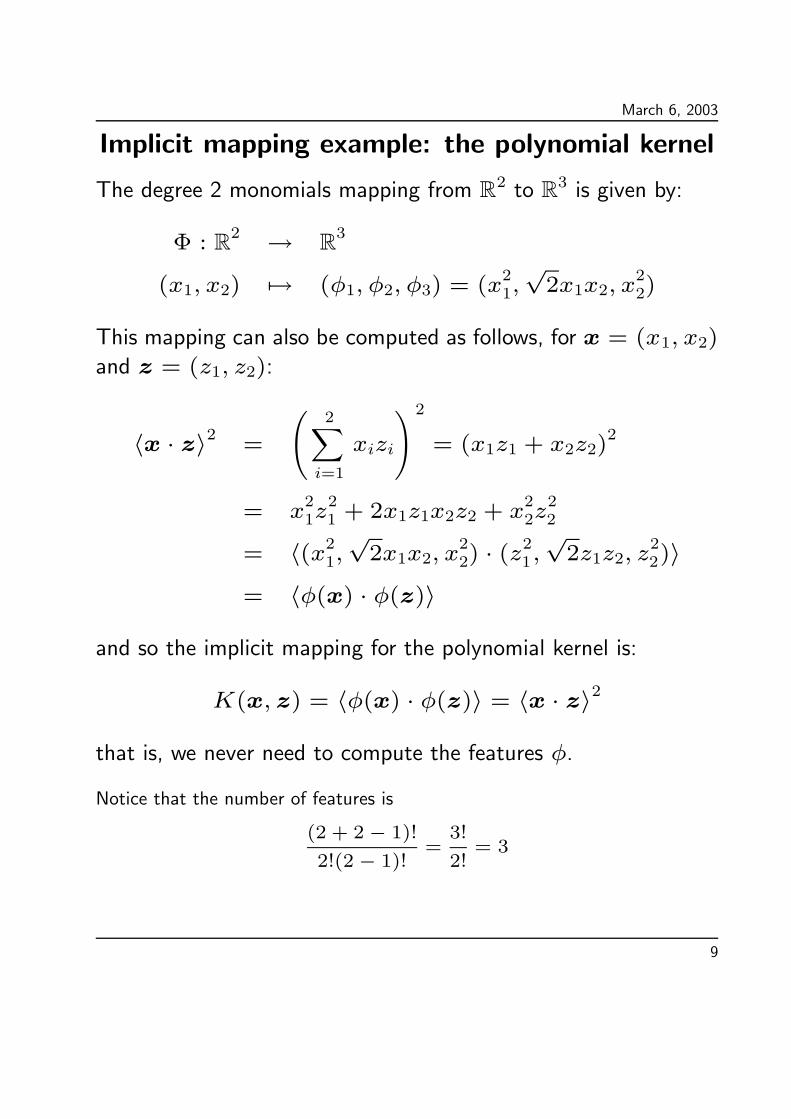
Implicit mapping example: the polynomial kernel
The degree 2 monomials mapping from R2 to R3 is given by:
Φ : R2 → R3
(x1, x2) 7→ (φ1, φ2, φ3) = (x21,√2x1x2, x
22)
This mapping can also be computed as follows, for x = (x1, x2)
and z = (z1, z2):
〈x · z〉2 =
(
2∑
i=1
xizi
)2
= (x1z1 + x2z2)2
= x21z
21 + 2x1z1x2z2 + x
22z
22
= 〈(x21,√2x1x2, x
22) · (z
21,√2z1z2, z
22)〉
= 〈φ(x) · φ(z)〉
and so the implicit mapping for the polynomial kernel is:
K(x, z) = 〈φ(x) · φ(z)〉 = 〈x · z〉2
that is, we never need to compute the features φ.
Notice that the number of features is
(2 + 2− 1)!
2!(2− 1)!=
3!
2!= 3
9

March 6, 2003
The linear learning machine in terms of kernels
The non-linear machine is build in two steps: use a fixed non-
linear mapping to transform the data into a feature space, and
then use a linear machine to classify them in the feature space.
The linear machine in feature space:
f(x) =
N∑
i=1
wiφi(x) + b
we don’t need to explicitly construct weights w, in dual form
f(x) =∑
i=1
αiyi⟨
φ(xi) · φ(x)⟩
+ b
and we don’t need to explicitly construct features φ,
f(x) =∑
i=1
αiyiK(xi,x) + b
using the kernel representation.
We could also ignore all examples i /∈ SV for which αi = 0, i.e.
f(x) =∑
i∈SVαiyiK(xi,x) + b
these vector are known as support vectors.
10

March 6, 2003
The perceptron using a kernel?
Our perceptron algorithm in dual form with only one small change:
function [alpha, R] = perceptron_dual_poly(X, y, d)
%PERCEPTRON_DUAL_POLY perceptron algorithm in dual form + polynomial kernel
% length of the input vector
n = size(X,2);
% the number of training samples
ell = size(X,1);
% initial bias, zeros
b = 0;
% convergence flag
flag = 1;
% compute the *Kernel* matrix
K = (X*X’).^d; % <----
% the parameter R
R = max(sqrt(diag(K)));
% the dual variables alpha
alpha = zeros(ell,1);
% start repeat (while) loop
while (1 == flag),
flag = 0;
for i = 1:ell,
if (y(i)*((y.*alpha)’*K(:,i) + b) <= 0),
alpha(i) = alpha(i) + 1;
b = b + y(i)*R^2;
flag = 1;
end
end
end
11
March 6, 2003
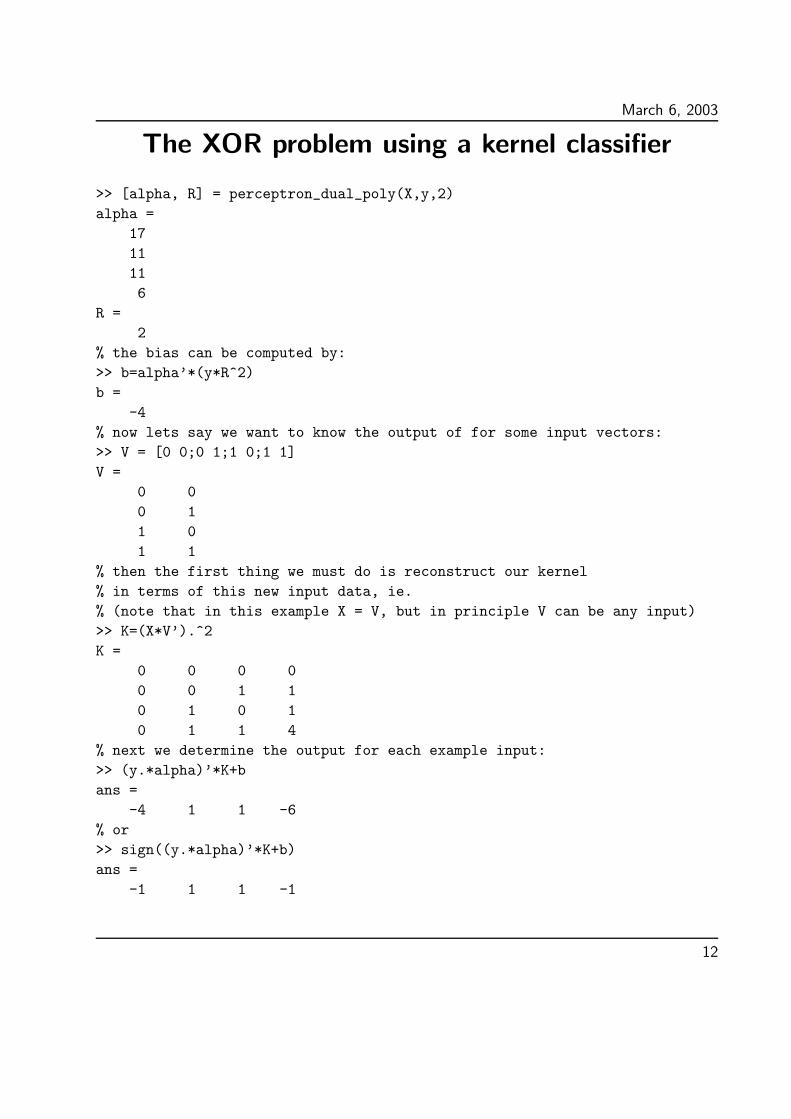
The XOR problem using a kernel classifier
>> [alpha, R] = perceptron_dual_poly(X,y,2)
alpha =
17
11
11
6
R =
2
% the bias can be computed by:
>> b=alpha’*(y*R^2)
b =
-4
% now lets say we want to know the output of for some input vectors:
>> V = [0 0;0 1;1 0;1 1]
V =
0 0
0 1
1 0
1 1
% then the first thing we must do is reconstruct our kernel
% in terms of this new input data, ie.
% (note that in this example X = V, but in principle V can be any input)
>> K=(X*V’).^2
K =
0 0 0 0
0 0 1 1
0 1 0 1
0 1 1 4
% next we determine the output for each example input:
>> (y.*alpha)’*K+b
ans =
-4 1 1 -6
% or
>> sign((y.*alpha)’*K+b)
ans =
-1 1 1 -1
12

March 6, 2003
Optical character recognition demo
We experiment with the US Postal Service OCR database which
contains 7291 examples for the purpose of training and 2007
examples for testing. The object is to learn to recognize 16× 16
pixel images of handwritten digits from 0 to 9. For example, here
are the characters 6, 2, 6, 5, 5, 8 and 2:6(4,2,0) 2(3,2,0) 6(2,4,5) 5(2,5,3) 5(8,5,2) 8(4,8,0) 2(0,3,2) 4(9,4,1) 6(4,6,8) 8(3,8,4)
5(4,5,0) 6(2,4,0) 9(7,9,2) 2(0,2,5) 8(3,8,4) 0(9,8,7) 6(5,2,4) 6(4,3,2) 8(3,2,0) 1(4,1,7)
8(3,5,2) 1(6,2,1) 5(8,5,9) 8(2,8,3) 9(2,7,8) 8(0,8,3) 2(3,8,0) 9(5,7,3) 9(7,4,5) 5(3,5,2)
5(3,5,6) 7(4,0,3) 1(7,1,9) 8(2,7,4) 3(5,3,8) 1(6,2,5) 8(0,5,8) 9(1,9,3) 7(9,3,7) 0(4,0,5)
3(8,4,5) 0(2,0,4) 0(4,0,5) 2(8,2,9) 2(8,2,3) 2(8,2,3) 2(3,0,8) 8(3,5,2) 0(2,0,3) 8(3,2,8)
The kernel based dual perceptron algorithm was tested on this
data in a similar way to the XOR problem. However, this
is a multi-classification problem and so 10 one-against-the-rest
perceptrons are trained.
To run this demo you will need the data files:
usps digits training.mat and usps digits testing.mat.
Also the MATLAB script ocrdemo.m and the MATLAB functions
perceptron dual kernel.m and the kernel function kernel.m.
Because of memory limitations in MATLAB only the first≈ 2000
examples of the 7291 are used for training. In this case we get a
classification error of 8.37%.
13

March 6, 2003
The OCR demo using pairwise classification
In pairwise classification, er train a classifier for each possible
pair of classes. For m classes, this results in (m − 1)m/2
binary classifiers. This values is larger than the one-against-the
rest classifiers, which are 10 in this demo, but 45 using pairwise
classification.
At first this may seem to be a slower approach, but actually the
training sets are smaller and so it is actually possible to save
time! Furthermore, because the training sets are smaller it was
now possible to use the entire training set in MATLAB.
We ran 45 binary classifiers on the whole data set and used a
voting scheme for classification, i.e. the class which gets the
highest number of votes wins! in this case a classification error of
6.38% was achived (probably because we used the whole training
set).
The problem with the one-against-the-rest is that the real valued
ouputs are on different scales! However, this is the most common
approach today and some efforts are being made in tranforming
the real valued ouputs into class probabilities.
14

March 6, 2003
Features for strings and texts
Let Σ∗ denote the set of all strings of finite length that are madeup from characters in the set Σ. If eg. Σ = {a,b,c} thenΣ∗ = {ε, a,b,c,aa,ab,ba,bb,aaa,aab, . . .} where ε denotesthe empty string.
If s ∈ Σ∗ then |s| denotes the length of s, i.e. the number ofcharacters in s. |ε| = 0.
If u ∈ Σ∗ and s ∈ Σ∗ we say that u is a substring of s if
there exist indicies i = (i1, i2, . . . , i|u|) with 1 ≤ i1 < i2 <
. . . < i|u| ≤ |s| such that uj = sij for j = 1, . . . , |u|.Then we also write u = s(i). s[i : j] denotes the substring
si, si+1 . . . sj−1sj of length j − i+ 1.
Let m = |Σ| be the number of (distinct) characters in Σ. Thenfor a given n ≥ 1 we can define a feature map φn : Σ∗ 7→ Rmn
that associates with each string s ∈ Σ∗ a real valued vectorof length mn that contains, for every possible distinct substring
of length n, how many different such substrings there are in s.
Below we show such feature vectors for the strings s = abcaaab
and t = bcaac when n = 1, 2, 3 and Σ = {a,b,c}.
15
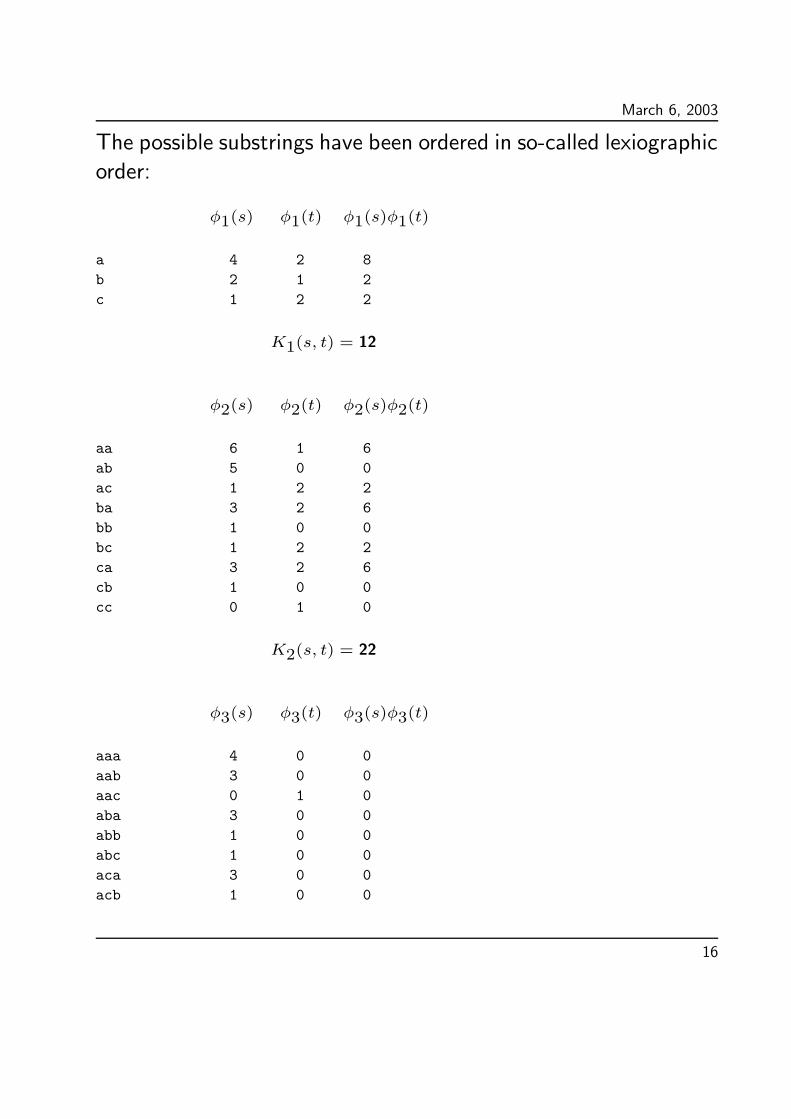
March 6, 2003
The possible substrings have been ordered in so-called lexiographic
order:
φ1(s) φ1(t) φ1(s)φ1(t)
a 4 2 8
b 2 1 2
c 1 2 2
K1(s, t) = 12
φ2(s) φ2(t) φ2(s)φ2(t)
aa 6 1 6
ab 5 0 0
ac 1 2 2
ba 3 2 6
bb 1 0 0
bc 1 2 2
ca 3 2 6
cb 1 0 0
cc 0 1 0
K2(s, t) = 22
φ3(s) φ3(t) φ3(s)φ3(t)
aaa 4 0 0
aab 3 0 0
aac 0 1 0
aba 3 0 0
abb 1 0 0
abc 1 0 0
aca 3 0 0
acb 1 0 0
16
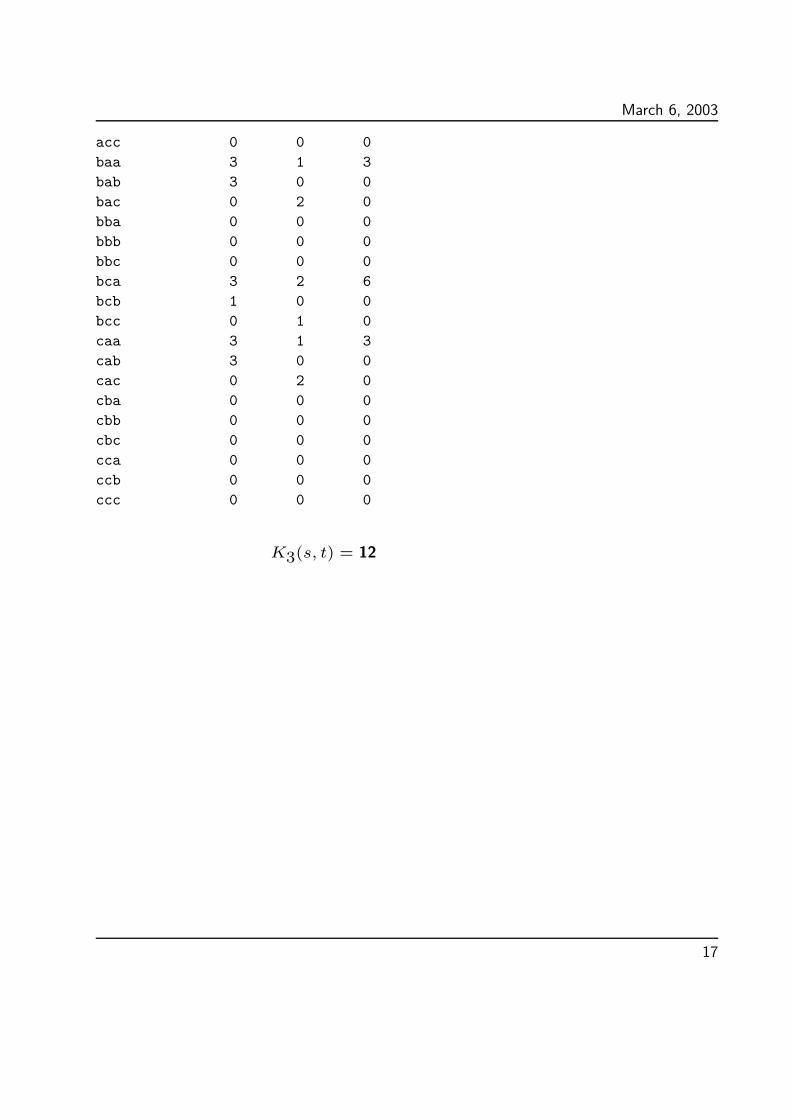
March 6, 2003
acc 0 0 0
baa 3 1 3
bab 3 0 0
bac 0 2 0
bba 0 0 0
bbb 0 0 0
bbc 0 0 0
bca 3 2 6
bcb 1 0 0
bcc 0 1 0
caa 3 1 3
cab 3 0 0
cac 0 2 0
cba 0 0 0
cbb 0 0 0
cbc 0 0 0
cca 0 0 0
ccb 0 0 0
ccc 0 0 0
K3(s, t) = 12
17

March 6, 2003
The kernel from string features
Let Kn(s, t) denote the inner product⟨
φn(s) · φn(t)⟩
. We
now observe that Kn(s, t) can be evaluated recursively without
first explicitly constructing φn(s) and φn(t) by making use of
the following relations:
• Ko(s, t) = 1 for all s, t,
• Ki(s, t) = 0 if min(|s|, |t|) < i, i = 1, 2, . . ., and
• Ki(sx, t) = Ki(s, t) +∑
j:tj=xKi−1(s, t[1 : j − 1]),
x ∈ Σ, i = 1, 2, . . .
The last sum is the sum of allKi−1(s, t[1 : j−1]) values where
tj is the same character as x.
18
March 6, 2003
MATLAB function for the string kernel
The following MATLAB function calculates for given input strings
Kn(s, t) in a non-recursive manner by successively calculating
K0(s, t), K1(s, t), . . . , Kn(s, t).
For each fixed i we calculate successively Ki(s[1 : j], t[1 : k])
k = 0, 1, . . . |t|, j = 0, 1, . . . , |s| making use of the relationsabove. Since the indicies in MATLAB start with 1 (not 0)
Ki(s[1 : j], t[1 : k]) is denoted by K(j + 1, k + 1, i + 1).
Also note that strings in MATLAB are effectively handled as
vectors of unicode-values corresponding to the characters in the
string.
The MATLAB function is in fact more general in that it evaluates
for an input weight-vector w of length n the weighted kernel∑n
i=1wiKi(s, t).
Also note that the complexity of the algorithm is O(n|s||t|).By comparison the number of elements in the feature vector is
mn, leaving apart the number of steps required to calculate each
element.
19
March 6, 2003
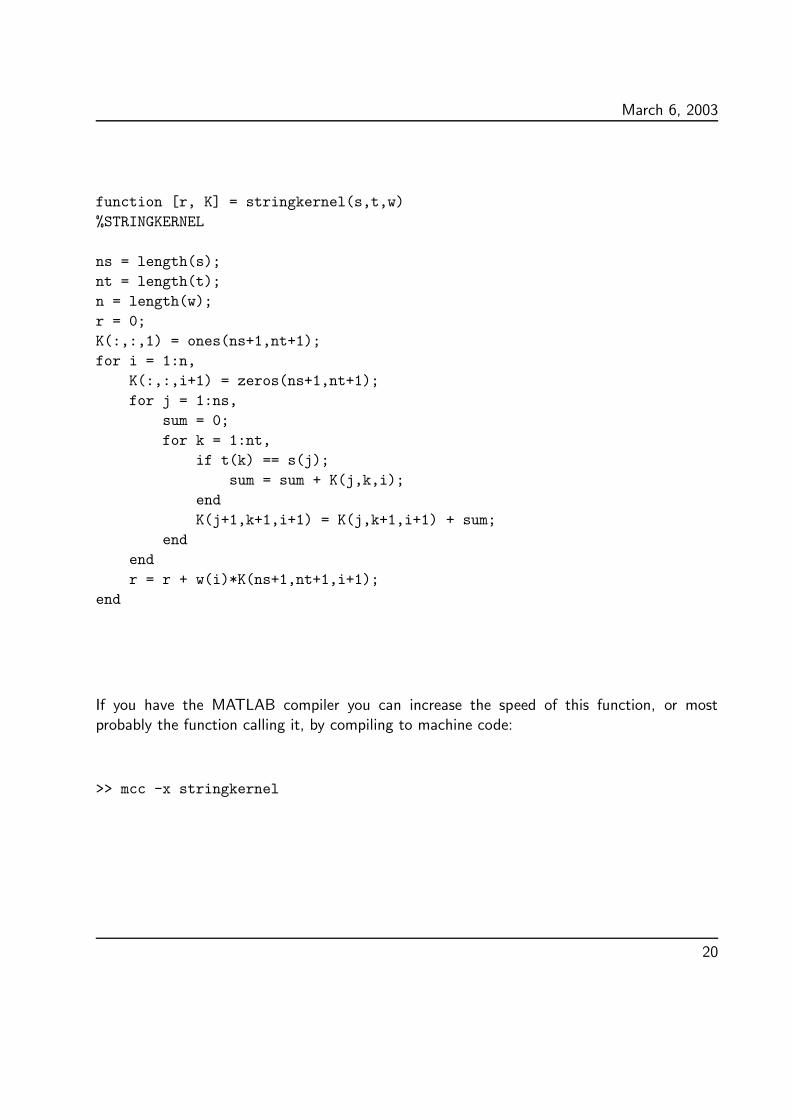
function [r, K] = stringkernel(s,t,w)
%STRINGKERNEL
ns = length(s);
nt = length(t);
n = length(w);
r = 0;
K(:,:,1) = ones(ns+1,nt+1);
for i = 1:n,
K(:,:,i+1) = zeros(ns+1,nt+1);
for j = 1:ns,
sum = 0;
for k = 1:nt,
if t(k) == s(j);
sum = sum + K(j,k,i);
end
K(j+1,k+1,i+1) = K(j,k+1,i+1) + sum;
end
end
r = r + w(i)*K(ns+1,nt+1,i+1);
end
If you have the MATLAB compiler you can increase the speed of this function, or mostprobably the function calling it, by compiling to machine code:
>> mcc -x stringkernel
20

March 6, 2003
Example using the MATLAB function
Below we show the matrices Ki(s, t) when s = abcaaab,t = bcaac and i = 0, 1, 2, 3.
>> r = stringkernel(’abcaaab’,’bcaac’,[1 1 1])
r =
46
>> [r,K]=stringkernel(’abcaaab’,’bcaac’,0.9.^(2*[1:3]))
r =
30.5315
K(:,:,1) =
empty b bc bca bcaa bcaac
empty 1 1 1 1 1 1
a 1 1 1 1 1 1
ab 1 1 1 1 1 1
abc 1 1 1 1 1 1
abca 1 1 1 1 1 1
abcaa 1 1 1 1 1 1
abcaaa 1 1 1 1 1 1
abcaaab 1 1 1 1 1 1
K(:,:,2) =
0 0 0 0 0 0
0 0 0 1 2 2
0 1 1 2 3 3
0 1 2 3 4 5
0 1 2 4 6 7
0 1 2 5 8 9
0 1 2 6 10 11
0 2 3 7 11 12
21

March 6, 2003
K(:,:,3) =
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 1 1 4
0 0 1 3 6 9
0 0 1 5 12 15
0 0 1 7 19 22
0 0 1 7 19 22
K(:,:,4) =
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 1 2 2
0 0 0 2 6 6
0 0 0 3 12 12
0 0 0 3 12 12
On pages 44–45 in the book it is suggested that in the feature
vector φn(s) all values should be multiplied by a factor λn where
0 < λ ≤ 1, This implies that the kernel valueKn(s, t) should be
multiplied by λ2n. According to this we might choose the weights
in the general kernel such that wi = λ2i, i = 1, 2, . . . , n.
We do, however, not introduce the auxiliary kernel K ′i(s, t) as
done in the book. If we associate the kernel value Ki(s, t) with
the choice λ = 1 as is done above, then in fact K ′i(s, t) =
Ki(s, t), and we can include the effect of choosing λ < 1, simply
by multiplying Ki(s, t) with λ2i at the end of our calculations.
22
March 6, 2003
Text versus string kernels
We can construct the same form of kernel working with texts
rather than strings by treating the words of the text as characters
and the text as strings of words. Here it may seem to complicate
matters that we do not usually a priory have information about
all possible characters, i.e. words, that may be included in the
text. While this would cause complications when dealing directly
with feature vectors it does not do so when calculating the kernels
directly with the algorithm above.
23

March 6, 2003
Questions
1. We might be interested in restricting the feature vectors φn(s)
in such a way that we only consider occurrences of substrings
of the form u = s(i : j) where 1 ≤ i ≤ j ≤ |s| andj − i + 1 = n. In the example above we have eg. that the
ab-coordinate of φ2(abcaaab) has the value 2. How would
you change the algorithm above to calculate the corresponding
kernels?
2. We might be interested in changing the features vectors φn(s)
in such a vay that we consider occurrences of substrings
s(i : j), where j − i + 1 = n that differ in at most m
places from a given string u. How would you now calculate
the corresponding kernels? Note: Such kernels (so called
mismatch string kernels) have been used eg. in classification
of proteins into functional and structural classes based on
homology (evolutionary similarity) of protein sequence data.
In the example above we have eq. that if m = 1 then the
aba-coordinate of φ3(abcaaab) has the value 2.
24
March 6, 2003
Levenshtein distance (edit distance)
Levenshtein1 distance is a measure of the similarity between two
strings, which we will refer to as the source string (s) and
the target string (t). The distance is the number of deletions,
insertions, or substitutions required to transform s into t. For
example,
• s is “test” and t is ”test”, then d(s, t) = 0, because the
strings are identical and no transformation is needed.
• s is “test” and t is “best”, then d(s, t) = 1, because one
substitution (change “t” to “b”) is sufficient to transform s
into t.
The greater the Levenshtein distance, the more different the
strings are.
The Levenshtein distance algorithm has been used in:
• spell checking,• speech recognition,• DNA analysis,• plagiarism detection.1Levenshtein distance is named after the Russian scientist Vladimir Levenshtein, who
devised the algorithm in 1965.
25

March 6, 2003
Edit distance algorithm
The edit distance (dynamic programming) algorithm is as follows:
1. let ns and nt be the length of the strings s and t respectively,
and construct a zero matrix C of size (ns + 1)× (nt + 1),
2. initialize the first column with Ci+1,1 = Ci,1 + deletion cost,
i = 1, . . . , ns (the deletion cost is by default 1)
3. initialize the first row with C1,j+1 = C1,j + insertion cost,
j = 1, . . . , nt (the insertion cost is by default 1)
4. if s[i] is equal to t[j], the substitution cost is 0 otherwise it
takes some default values (usually 1).
5. the element Ci,j of the matrix equal to the minimum of:
• the element immediately above plus deletion cost• the element immediately to the left plus insertion cost• the element diagonally above and to the left plus thesubstitution cost
6. the edit distance is given by d(s, t) = Cns+1,nt+1.
26

March 6, 2003
Edit distance example
Here are examples of cost matrices for the source word “water”
and target word “wine”.
In this example the cost is 1 for all operations.
empty w i n e
empty 0 1 2 3 4
w 1 0 1 2 3
a 2 1 1 2 3
t 3 2 2 2 3
e 4 3 3 3 2
r 5 4 4 4 3 <- answer
^
In this example the cost of deleting a letter is 2:
empty w i n e
empty 0 1 2 3 4
w 2 0 1 2 3
a 4 2 1 2 3
t 6 4 3 2 3
e 8 6 5 4 2
r 10 8 7 6 4 <- answer
^
27

March 6, 2003
Radial basis function
We now introduce a new kernel based on the string edit distance.
The most general formula for any radial basis function (RBF) is
K(xc,x) = ϕ(
(x− xc)′D−1(x− xc)
)
where ϕ is the function used, xc is the center and D is metric.
The term (x − xc)′D−1(x − xc) is the distance between theinput x and the center xc in the metric defined by D. We think
of the “training vectors” as begin the centers.
In the Euclidean case we have D = r2I for some scalar radius
r, and the above simplifies to:
K(xc,x) = ϕ
(
(x− xc)′(x− xc)r2
)
The most common Radial Basis functions are:
• the Gaussian, ϕ(z) = exp(−z),• the inverse multi-quadratic, ϕ(z) = (1 + z)−1/2,
• and the Cauchy, ϕ(z) = (1 + z)−1.
28

March 6, 2003
Radial basis function using string edit distance
Since any metric can be used with a Radial basis function we can
design a kernel for strings using the edit-distance, d(s, t), for
example:
K(s, t) = exp(−d(s, t)/σ)where σ > 0.
See also page 43 in book, Corollary 3.13, part 3.
29
March 6, 2003
Chromosomal data classification demo
The following demo is the first sequence recognition task used forthe WCCI2002 competition. The task is a chromosomal binaryclassification problem. The input strings are of variable lengthand look something like this:
A==B=f==C===f==A===f=A===f====B===f=A==f=A====f==A==f=A===b===Af=f
A======D===f===A==f===A=f====B===f=A===d=====A=====d=======f
BA=f====C=====f==A=f==A==e===B===f===B=====d====A==e===A=f=e
A==A=f===D===f=A==f==A====f=====B==f==A==f=A===e==A======d=A=e=f
the first two belong to one class while the last two belong to the
other class, do you see any common patterns?
see course webpage for demo.
30

March 6, 2003
Differences between the string and OCR demo
In the OCR example we can form a kernel, K(x, z) =⟨
x · z⟩
in the input space as an inner product of data vectors x and
y. We choose however to change this kernel to a new kernel
Kd(x, z) =⟨
x · y⟩dor Kd1(x, z) =
(
1 +⟨
x · y⟩) d
where
d ∈ {2, 3, . . .}.
Remark; The kernel Kd can be interpreted as choosing a
feature φd(x) with(n+d−1
d
)
coordinates, one for each distinct
possible monomial of degree d made from the original coordinates.
The kernel Kd1 can be interpreted as choosing a feature φd1(x)
and in the second case we replace the input vector x with the
feature vector φd1 with(n+1
d
)
coordinates, one for each possible
distinct monomial of degree 0 up to and including d.
For example, when n = 2 and d = 3, then
φd(x1, x2) =(
x31,√3x
21x2,
√3x1x
22, x
32)
and φd1(x1, x2) =
(
1,√3x1,
√3x2,
√3x1
2,√6x1x2,
√3x2
2, x1
3,√3x1
2x2,
√3x1x2
2, x2
3)
31

March 6, 2003
In the string case we cannot form inner products in the input
space since it consists of strings rather than real vectors. We
map the string s, however, into a feature vector φ(s) that
are real vectors and this in turn allows us to define kernels
K(s, t) =⟨
φ(s) · φ(t)⟩
as an inner product of these feature
vectors. Thus we are now constructing new kernel from features.
Although we are constructing the string kernels from features, we
never actually construct the features, we are in fact constructing
new kernels directly from old kernels. That is, again we do not
construct the feature vectors explicitly, since it turns out to be
computationally more advantageous to do this implicitly.
When constructing a kernel in the string case using string edit
distance, we use neither features nor other kernels to construct
the kernel. Here we obviously have to take care that the kernel
satisfies properties that are implicitly taken care of when the
kernel is defined from inner products. We return to this at the
end of this chapter.
Remark: In connection to the kernels based on distances it is interesting to note thatif we have a kernel K(x, z) based on the inner product
⟨
x · z⟩
then one may define thedistance between x and y as:
√
K(x,x) +K(y,y)− 2K(x,y)
32

March 6, 2003
Kernel regression
We now show how kernels can be introduced to regression or
function learning. We now write our regression model in terms of
features:
yi ≈⟨
w · φ(xi)⟩
+ b
where the aim is to find a weight vector w that minimizes the
discrepancies between the left and right hand sides for a given
dataset (xi, yi), i = 1, . . . , `. The basic idea is to express w
in terms of a new vector α s.t. w = [φ(x1), . . . ,φ(x`)]α,
then the model becomes:
yi ≈∑
j=1
αj⟨
φ(xj) · φ(xi)⟩
+ b
or
yi ≈∑
j=1
αjK(xj,xi) + b
using the kernel representation.
If we want to use this model to estimate y for a given x outside
the original dataset we have that:
y =∑
j=1
αjK(xj,x) + b
33

March 6, 2003
One of the advantages with this representation is that the kernels
K(xi,xj) can be evaluated indirectly from eg. other kernels
of distances between xi and xj as already shown. We let as
before G denote the Gram matrix whose (i, j) − th element is
K(xi,xj). In terms of it the model becomes
y ≈ Gα+ b
1...
1
when the offset is include in the data we denote the Gram matrix
with G and the α vector with α.
The only problem here is that since K is singular, when the
dimension of the feature space N < `, so it cannot be solved
using the normal equations. But we can reformulate the original
problem using ridge regression.
34

March 6, 2003
Ridge regression revisited
We have already derived in chapter 2 the kernel form of the
normal equations for ridge regression:
(
λI` + G)
α = y
Here the Gram matrix G is simply a linear kernel and can be
replaced with any other of a variety of kernels.
Let’s say we would like to apply the monomial kernel of order
d = 6, then
K(xi,xj) =⟨
xi · xj⟩6where x′ = [x′ 1]
Note that when we transform our Gram matrix (the linear
kernel) to a polynomial kernel we have changed our regression
formulation. Thus if the feature space is of higher dimension
than the input space and we would therefore expect the error to
become smaller (in fact zero if the dimension of the feature space
N ≥ `).
For example, recall the example given in the lecture notes forchapter 2:
>> X = [3 7;4 6;5 6;7 7;8 5;4 5;5 5;6 3;7 4;9 4] ;
>> y = [6 5 5 7 5 4 4 2 3 4]’ ;
35
March 6, 2003
If we set say λ = 0.1 then we can compute α as before:
>> d = 6 ;
>> lambda = 0.1 ;
>> K = (Xhat*Xhat’).^d ;
>> alpha= (K + eye(ell)*lambda)\y ;
and we can check the error as follows:
>> error = (y-K*alpha)’
error =
1.0e-006 *
0.0124 -0.1324 -0.0840 0.0366 -0.0684 0.5842 -0.2903 -0.1841 0.2326 -0.0020
The error is very small, but what about other values for x ?
We would like to look at other possible inputs, let Z be a allpossible combination of integers from 1 to 10, i.e. a 100 × 2matrix. We can compute the output of the learned function asfollows:
>> Z = [ ]; for i=1:10, for j=1:10, Z = [Z;i j]; end, end
>> Zhat = [Z ones(size(Z,1),1)];
>> Kt = (Xhat*Zhat’).^6;
>> yest = Kt’*alpha;
36
March 6, 2003
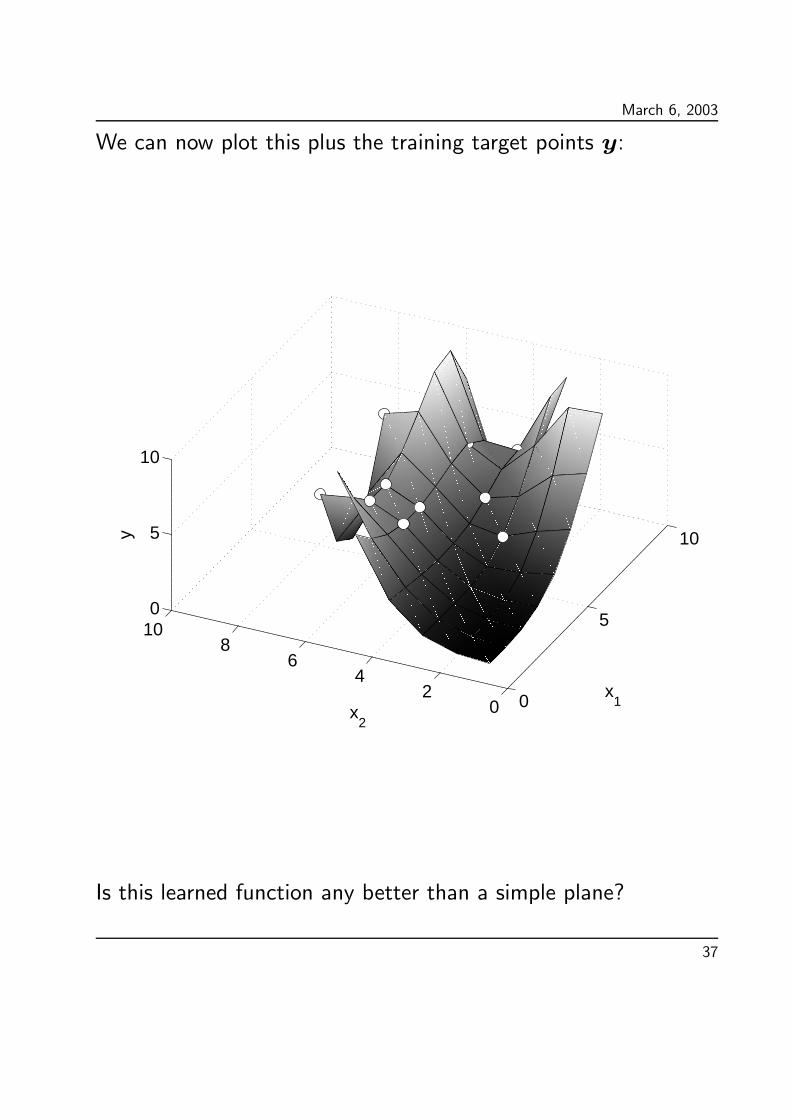
We can now plot this plus the training target points y:
0
5
10
02
46
8100
5
10
x1
x2
y
Is this learned function any better than a simple plane?
37
March 6, 2003
Further experiments using the monomial kernel:
>> lambda = 0.001
lambda =
0.0010
>> alpha = (lambda*eye(ell) + G)\y;
>> G*alpha
ans =
5.9358
4.9943
5.2535
6.9723
4.8303
3.7938
4.0529
1.9109
3.3706
3.8889
% Same result as with the iteration (see NEXT section).
% Now see how the error changes if we introduce polynomial kernels
>> y-G*alpha
ans =
0.0642
0.0057
-0.2535
0.0277
0.1697
0.2062
-0.0529
0.0891
-0.3706
0.1111
>> G2 = G.^2;
>> alpha= (lambda*eye(ell) + G2)\y;
>> y-G2*alpha
ans =
0.0153
0.0209
38

March 6, 2003
-0.0420
-0.0241
0.1429
-0.0253
0.0233
0.0892
-0.1594
-0.0366
>> G3 = G.^3;
>> alpha = (lambda*eye(ell) + G3)\y;
>> y-G3*alpha
ans =
-0.0010
0.0119
-0.0105
-0.0002
0.0028
-0.0143
0.0158
0.0041
-0.0090
0.0005
>> G4 = G.^4;
>> alpha = (lambda*eye(ell) + G4)\y;
>> y-G4*alpha
ans =
1.0e-003 *
-0.0128
0.1469
-0.1505
0.0126
-0.0067
-0.1437
0.1645
0.0046
-0.0206
0.0049
39

March 6, 2003
Steepest descent for regression - kernel version
Consider the basic iteration step:
wnew = wold + ηX′(y − Xwold
)
from this we have, if α = Xw that:
X′αnew = X
′αold + ηX
′(y − XX ′
αold
)
and thus if G = XX′then
Gαnew = Gαold + ηG(
y − Gαold
)
or if we assume that G is invertible that:
αnew = αold + η(
y − Gαold
)
This is the iteration step of the kernel version.
40

March 6, 2003
For the ridge-regression where we minimize
λ⟨
w · w⟩
+⟨
(y − Xw) · (y − Xw)⟩
the basic step in the original version becomes
wnew = wold + η(
X′(y − Xwold
)
− λwold
)
and in the kernel version
αnew = αold + η(
y −(
G+ λI`)
αold
)
41

March 6, 2003
% We try the kernel method on our regression dataset:
>> Xhat=[X ones(ell,1)]
Xhat =
3 7 1
4 6 1
5 6 1
7 7 1
8 5 1
4 5 1
5 5 1
6 3 1
7 4 1
9 4 1
>> G = Xhat*Xhat’
G =
59 55 58 71 60 48 51 40 50 56
55 53 57 71 63 47 51 43 53 61
58 57 62 78 71 51 56 49 60 70
71 71 78 99 92 64 71 64 78 92
60 63 71 92 90 58 66 64 77 93
48 47 51 64 58 42 46 40 49 57
51 51 56 71 66 46 51 46 56 66
40 43 49 64 64 40 46 46 55 67
50 53 60 78 77 49 56 55 66 80
56 61 70 92 93 57 66 67 80 98
>> y = [6 5 5 7 5 4 4 2 3 4]’ ;
>> alpha = zeros(10,1)
alpha =
0
0
0
0
0
0
0
0
0
0
42
March 6, 2003
>> eta = 0.01
eta =
0.0100
>> for i=1:100, alpha = alpha + eta*(y - G*alpha); end
>> G*alpha
ans =
1,0e+073 *
-1.4772
-1.4986
-1.6586
-2.1173
-2.0000
-1.3599
-1.5199
-1.4026
-1.7013
-2.0213
% eta clearly too large so try again with smaller eta
>> alpha = zeros(10,1);
>> eta = 0.001;
>> for i=1:100, alpha = alpha + eta*(y - G*alpha); end
>> G*alpha
ans =
5.9061
5.1328
5.1792
6.0914
4.4986
4.3133
4.3596
2.7668
3.6327
3.7253
>> for i=1:10000, alpha = alpha + eta*(y - G*alpha); end
43

March 6, 2003
>> G*alpha
ans =
5.9406
5.0193
5.2463
6.8484
4.7790
3.8711
4.0981
2.0286
3.4038
3.8577
>> for i=1:10000, alpha = alpha + eta*(y - G*alpha); end
>> G*alpha
ans =
5.9364
4.9973
5.2527
6.9580
4.8244
3.8027
4.0581
1.9245
3.3744
3.8852
>> for i=1:10000, alpha = alpha + eta*(y - G*alpha); end
>> G*alpha
ans =
5.9358
4.9940
5.2536
6.9741
4.8310
3.7927
4.0523
1.9092
3.3701
3.8893
44

March 6, 2003
>> for i=1:10000, alpha = alpha + eta*(y - G*alpha); end
>> G*alpha
ans =
5.9357
4.9935
5.2537
6.9765
4.8320
3.7912
4.0514
1.9069
3.3695
3.8899
>> for i=1:10000, alpha = alpha + eta*(y - G*alpha); end
>> alpha = alpha + eta*(y - G*alpha);
>> G*alpha
ans =
5.9357
4.9935
5.2538
6.9769
4.8322
3.7910
4.0513
1.9066
3.3694
3.8900
% We seem to have reached convergence after 40000 iterations!
45

March 6, 2003
1-norm regression
In chapter 2 we derived the following formulation:
min∑
i=1
ξ+i + ξ
−i
subject to Xw + ξ+ − ξ− = y and ξ+, ξ− ≥ 0.
The kernel version of the formulation will be exactly the same
except that the constraints become:
Gα+ ξ+ − ξ− = y
When re-solving the problem in chapter 2 using a polynomial
kernel, i.e. the (i, j)-the element of G, K(xi,xj), replaced
by K(xi,xj)d or (1 +K(xi,xj))
d we would again expect the
error vectors ξ+ and ξ+ to become smaller.
46
March 6, 2003
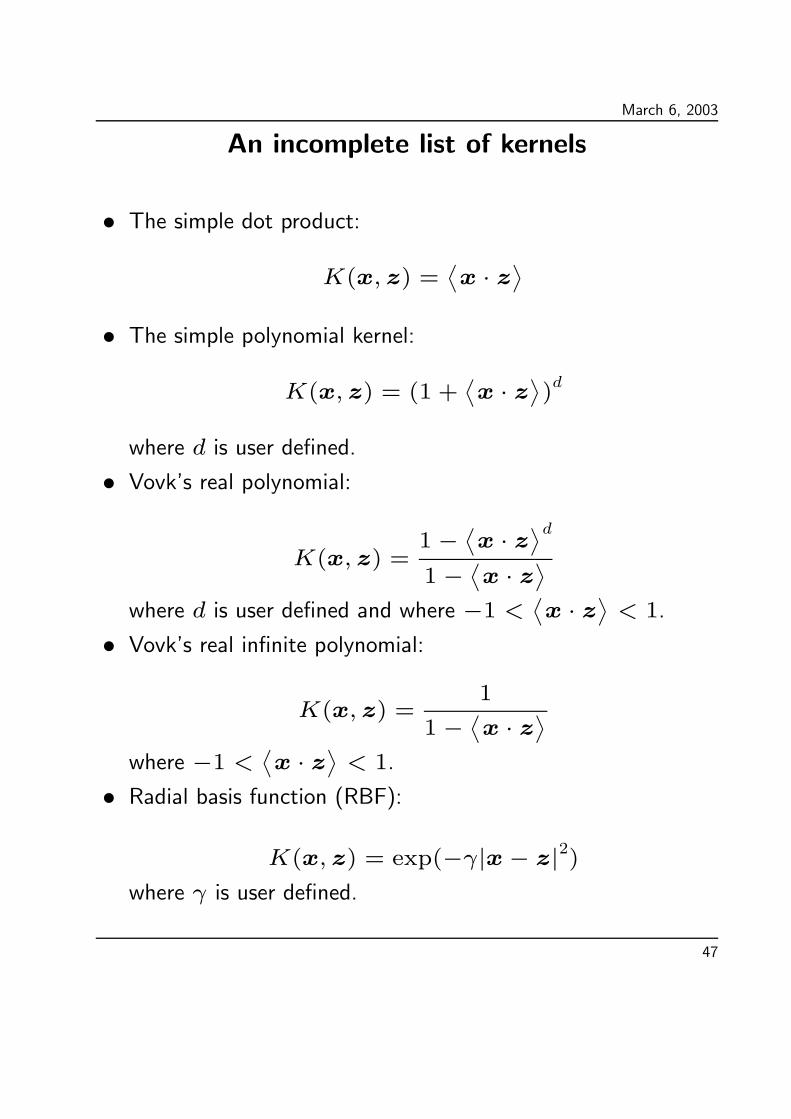
An incomplete list of kernels
• The simple dot product:
K(x, z) =⟨
x · z⟩
• The simple polynomial kernel:
K(x, z) = (1 +⟨
x · z⟩
)d
where d is user defined.
• Vovk’s real polynomial:
K(x, z) =1−
⟨
x · z⟩d
1−⟨
x · z⟩
where d is user defined and where −1 <⟨
x · z⟩
< 1.
• Vovk’s real infinite polynomial:
K(x, z) =1
1−⟨
x · z⟩
where −1 <⟨
x · z⟩
< 1.
• Radial basis function (RBF):
K(x, z) = exp(−γ|x− z|2)where γ is user defined.
47

March 6, 2003
• Two layer neural network (the sigmoid kernel):
K(x, z) =1
1 + exp(v⟨
x · z⟩
)− c
where v and c must satisfy Mercer’s condition (for example if
|x| = 1, |z| = 1 then c ≥ v.
• Linear splines with an infinite number of points:For the one-dimensional case:
Kk(x, z) = 1 + xz + xzmin(x, z)
−x+ z
2(min(xz))
2+
(min(x, z))3
3
for the multi-dimensional case
K(x, z) =
n∏
k=1
Kk(xk, zk)
• Full polynomial kernel:
K(x, z) =
(
⟨
x · z⟩
a+ b
)d
where a, b and d are user defined.
• Regularized Fourier (weaker mode regularization)
48

March 6, 2003
For the one-dimensional case:
K(x, z) =π
2γ
cosh π−|x−z|γ
sinh πγ
where 0 ≤ |x− z| ≤ 2π and γ is user defined.
For the multi-dimensional case
K(x, z) =
n∏
k=1
Kk(xk, zk)
• Semi Local Kernel
K(x, z) = [⟨
x · z⟩
+ 1]dexp(−‖x− z‖2σ2
)
where d and σ are user defined and weight between global
and local approximation.
• Regularized Fourier (stronger mode regularization)
K(x, z) =1− γ2
2(1− 2γ cos(x− z) + γ2)
where 0 ≤ |x − z| ≤ 2π and γ is user defined. For the
multi-dimensional case
K(x, z) =
n∏
k=1
Kk(xk, zk)
49

March 6, 2003
• Anova 1
K(x, z) = (
n∑
k=1
exp(−γ(xk − zk)2))d
where the degree d and γ are user defined.
50

March 6, 2003
Two layered neural network
The two layered neural network or sigmoid kernel deserved
some further remarks. Usually the two layered neural network
architecture is drawn as follows:
missing figure drawn in class
• The number of support vectors corresponds to the number ofhidden nodes,
• the weights of the hidden layer are the support vectors (x),• the weights of the output layer is α.
51

March 6, 2003
Properties of kernels
Assume that a kernel K(x, z) is defined as an inner product⟨
x · z⟩
where x, z ∈ Rn. If we construct from such a kernel
and from a set of ` data vectors xi, i = 1, . . . , `, the ` × `
Gram matrix G, where Gij = K(xi,xj), then this matrix will
have the following properties:
1. G is symmetric, i.e. G = G′ this follows from the fact that⟨
x · z⟩
=⟨
z · x⟩
.
2. G is positive (semi) definite, i.e. it holds true for any
vector α ∈ R` that α′Gα ≥ 0 or equivalently that∑`
i=1
∑`j=1Gijαiαj ≥ 0. This follows from the fact that
G = XX ′ whereX = [x1 . . . x`]′. If we set w = X ′α
then α′Gα = α′XX ′α = w′w = ‖w‖22 ≥ 0. (If
αGα > 0 for any non-zero α ∈ R` we say that G is
positive definite. Here, as in the book, we shall say that
G is positive definite even if α′Gα = 0 for some non-zero
α ∈ R`.)
52

March 6, 2003
When a kernel K(x, z) is not defined explicitly as an inner
product, the two properties above must be preserved when we
construct the Gram matrix from the kernel. Note that in this
case the space of data vectors, D, is not necessarily Rn for any n.
The first property is preserved if K(x, z) = K(z,x) for all
x,y ∈ D. In this case we say that the kernel K is symmetric.
The second property is preserved if
∫
D
∫
DK(x, z)f(x)f(z)dxdz ≥ 0
where f is any function defined on the data space with properties
that make the integral mathematically meaningful. In this case
we say that the kernel K is (semi) positive (cf. theorem 3.6 p.
35).
A kernel satisfying these two conditions is called aMercer kernel.
Note that if we choose f as a weighted sum of delta functions at
x1,x2, . . . ,x` ∈ D. with the weights α1, α2, . . . , α` then the
double integral reduces to the double sum:
∑
i=1
∑
j=1
K(xi,xj)αiαj
53

March 6, 2003
It is less straight-forward to show that a kernel is positive than
that it is symmetric. We draw attention to some necessary
conditions that follow the requirement that any Gram matrix
G s.t. Gi,j = K(xi,xj), i, j = 1, . . . , `, must be positive
definite, i.e that α′Gα ≥ 0 for any vector α ∈ Rn.
1. K(xi,xi) ≥ 0 for any data vector xi ∈ D. This follows by
choosing α s.t. αk =
{
1 if k = i,
0 otherwisek = 1, . . . , `
2. 12
(
K(xi,xi) + K(xj,xj))
≥ |K(xi,xj)| for any
xi,xj ∈ D. This follows by choosing α s.t.
αk =
1 if k = i
−1 if k = j, k = 1, . . . , `
0 otherwise
3. If λ is an eigenvalue of G then λ ≥ 0. Note that if λ is
an eigenvalue of G and v is the corresponding eigenvector
then Gv = λv. Furthermore, since G is symmetric λ and
v will be real valued. The result follows by choosing α = v
because then v′Gv = v′λv = λ‖v‖22 ≥ 0, so λ ≥ 0 since
‖v‖2 > 0
54
March 6, 2003
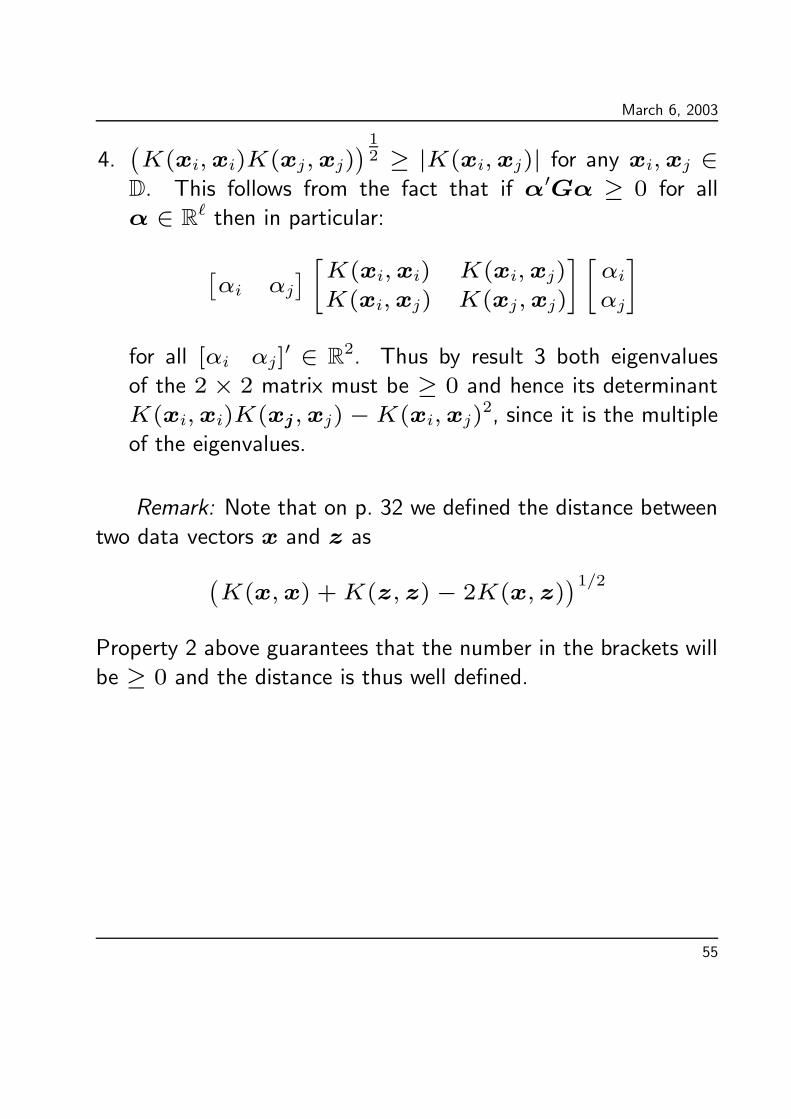
4.(
K(xi,xi)K(xj,xj))
12 ≥ |K(xi,xj)| for any xi,xj ∈
D. This follows from the fact that if α′Gα ≥ 0 for all
α ∈ R` then in particular:
[
αi αj]
[
K(xi,xi) K(xi,xj)
K(xi,xj) K(xj,xj)
] [
αiαj
]
for all [αi αj]′ ∈ R2. Thus by result 3 both eigenvalues
of the 2 × 2 matrix must be ≥ 0 and hence its determinant
K(xi,xi)K(xj,xj)−K(xi,xj)2, since it is the multiple
of the eigenvalues.
Remark: Note that on p. 32 we defined the distance between
two data vectors x and z as
(
K(x,x) +K(z, z)− 2K(x, z))1/2
Property 2 above guarantees that the number in the brackets will
be ≥ 0 and the distance is thus well defined.
55

March 6, 2003
Features from kernels
Suppose we have constructed an ` × ` Gram matrix G from a
symmetric and positive kernel K(x, z), s.t. Gij = K(xi,xj),
i, j = 1, . . . , `, and we are now interested in defining feature
vectors φ(xi), i = 1, . . . , ` such that
K(xi,xj) =⟨
φ(xi) · φ(xj)⟩
Since G will be symmetric and positive definite it will have `
real non-negative eigenvalues λ1, λ1, . . . , λ` and corresponding
eigenvectors v1, . . . ,v`. Moreover, these eigenvectors will be
mutually orthogonal, i.e.⟨
vi · vj⟩
= 0 if i 6= j and they can
be normalized s.t.⟨
vi · vi⟩
= 1 for i = 1, . . . , `.
It follows that if V is the `× ` matrix [v1 v2 . . .v`] then
GV = V
λ1 0. . .
0 λ`
= V Λ
and hence G = V ΛV ′. Hence, if we set V = V√Λ, i.e.
multiply the first column of V with√λ1 the second one with√
λ2 and so on, then
G = V V′
Thus we can define φ(xi)′ to be the i-th row of V ,
i = 1, . . . , `.
56

March 6, 2003
Note that the MATLAB function
[V, Lambda] = eig(G);
gives us the matrix of eigenvectors, V , and the diagonal matrix
of eigenvalues, Λ. Thus the matrix whose rows are feature
vectors corresponding to G will be
Vhat = V*sqrt(Lambda);
57

March 6, 2003
Making kernels from kernels
Let K1 and K2 be kernels over X ×X, X ⊆ Rn, a ∈ R+,
f(·) a real-valued function on X, φ : X 7→ Rm with kernel
K3 a kernel over Rm × Rm, and B a symmetric positive (semi)
definite n× n matrix. Then the following functions are kernels:
• K(x, z) = K1(x, z) +K2(x, z)
• K(x, z) = a+K1(x, z)
• K(x, z) = aK1(x, z)
• K(x, z) = K1(x, z)K2(x, z)
• K(x, z) = f(x)f(z)
• K(x, z) = exp (K1(x, z))
• K(x, z) = p(
K1(x, z))
• K(x, z) = K3
(
φ(x),φ(z))
• K(x, z) = x′Bz
where p(x) is a polynomial with positive coefficients.
58

March 6, 2003
Feature selection revisited
The task of feature extraction is highly problem-dependent and
for different domains the features may be completely different.
In many real world problems feature extraction can only be
partially automated, and the knowledge of human experts
remains indispensable.
In real world applications the number of features is often large.
The goal of feature selection is to reduce this dimensionality by
selecting only a subset of features.
There are in principle to approaches to finding a good feature
subset:
• search the feature space using the learning algorithm’s
estimated accuracy as a search criteria (e.g. cross validation),
or
• use a criteria which is “independent” of the learning algorithm(e.g. compute correlation between feature and target).
59
March 6, 2003
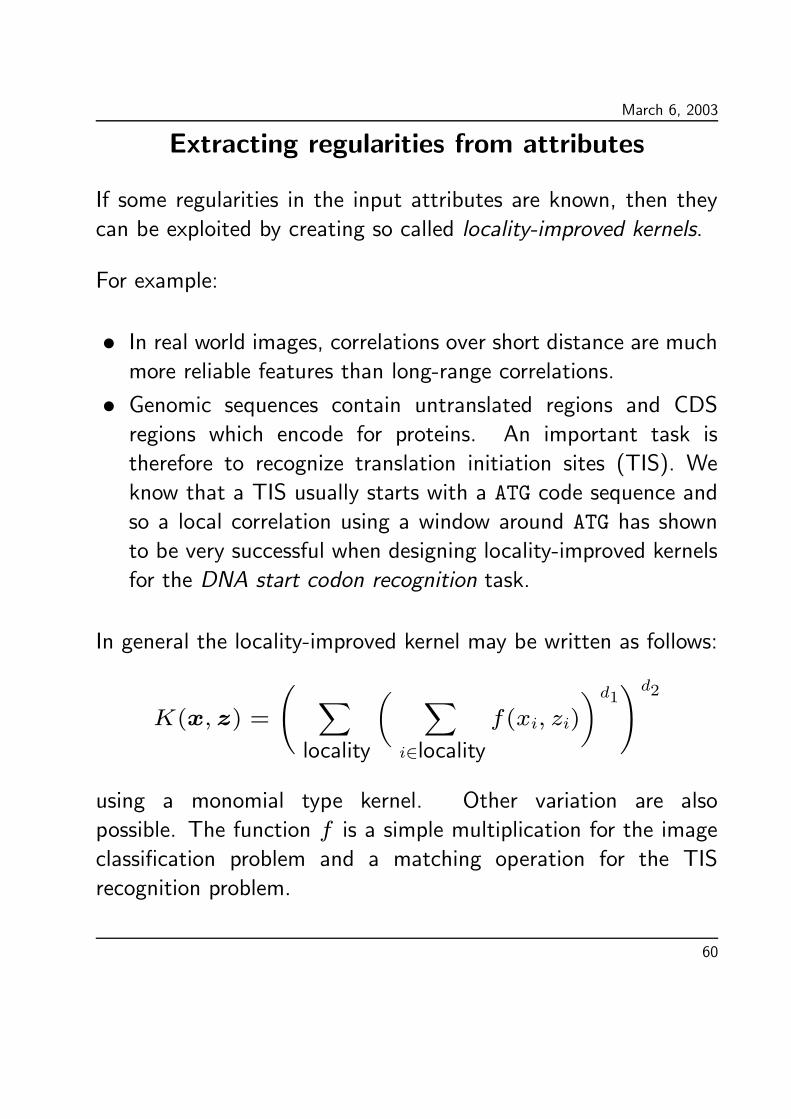
Extracting regularities from attributes
If some regularities in the input attributes are known, then they
can be exploited by creating so called locality-improved kernels.
For example:
• In real world images, correlations over short distance are muchmore reliable features than long-range correlations.
• Genomic sequences contain untranslated regions and CDSregions which encode for proteins. An important task is
therefore to recognize translation initiation sites (TIS). We
know that a TIS usually starts with a ATG code sequence and
so a local correlation using a window around ATG has shown
to be very successful when designing locality-improved kernels
for the DNA start codon recognition task.
In general the locality-improved kernel may be written as follows:
K(x, z) =
(
∑
locality
(
∑
i∈locality
f(xi, zi)
)d1)d2
using a monomial type kernel. Other variation are also
possible. The function f is a simple multiplication for the image
classification problem and a matching operation for the TIS
recognition problem.
60

March 6, 2003
Reproducing Kernel Hilbert Spaces
Let a before X ⊆ Rn denote an input space of possible
n-dimensional input vectors x = (x1, . . . , xn), φ denote the
mapping that maps each x ∈ X into an N -dimensional feature
vector φ(x) =(
φ1(x), . . . , φN(x))
, and K(x,y) denote a
(Mercer) kernel function defined on X×X such thatK(x,y) =⟨
φ(x) · φ(x)⟩
, the inner product of the feature vectors φ(x)
and φ(y) in the feature space F = {φ(x)|x ∈ X} ⊆ RN
Rather than associating with a given input vector x ∈ X its
feature vector φ(x) it is sometimes instructive to associate with
it the function∑N
i=1 φi(x)φi(x) = K(x,x) defined on X(note that here x is a fixed vector but x is a variable) which
contains information on the “relationship” between x and all
other input vectors x ∈ X .
61
March 6, 2003
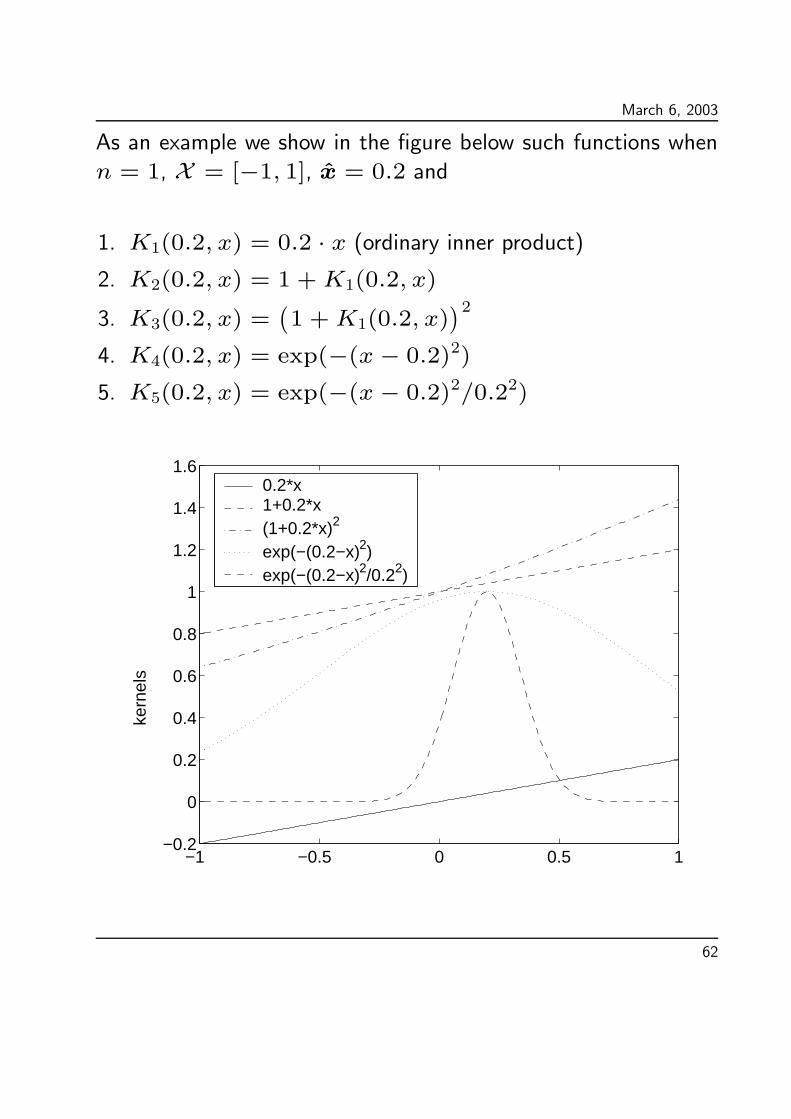
As an example we show in the figure below such functions when
n = 1, X = [−1, 1], x = 0.2 and
1. K1(0.2, x) = 0.2 · x (ordinary inner product)2. K2(0.2, x) = 1 +K1(0.2, x)
3. K3(0.2, x) =(
1 +K1(0.2, x))2
4. K4(0.2, x) = exp(−(x− 0.2)2)
5. K5(0.2, x) = exp(−(x− 0.2)2/0.22)
−1 −0.5 0 0.5 1−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
kern
els
0.2*x1+0.2*x(1+0.2*x)2
exp(−(0.2−x)2)exp(−(0.2−x)2/0.22)
62

March 6, 2003
For ` training vectors x1,x2, . . . ,x` ∈ X the binary
classification problem becomes in this context the problem
of finding ` real numbers α1, α2, . . . , α`, and b such that if we
form the function
f(x) =∑
i=1
αiK(xi,x)
f(xi) + b > 0 if xi is in the + class and
f(xi) + b < 0 if xi is in the − class, where b is a possible
offset value. This follows directly from the dual formulation of
this problem.
Example: It becomes clear in this context that if we take the
kernel to be K(x,y) = exp(−‖x − y‖2/σ2) and choose σ
sufficiently small , we can solve the binary classification problem
for the training set simply by setting αi = 1 if xi is in the +
class, αi = −1 if x is in the − class, and b = 0.
63
March 6, 2003
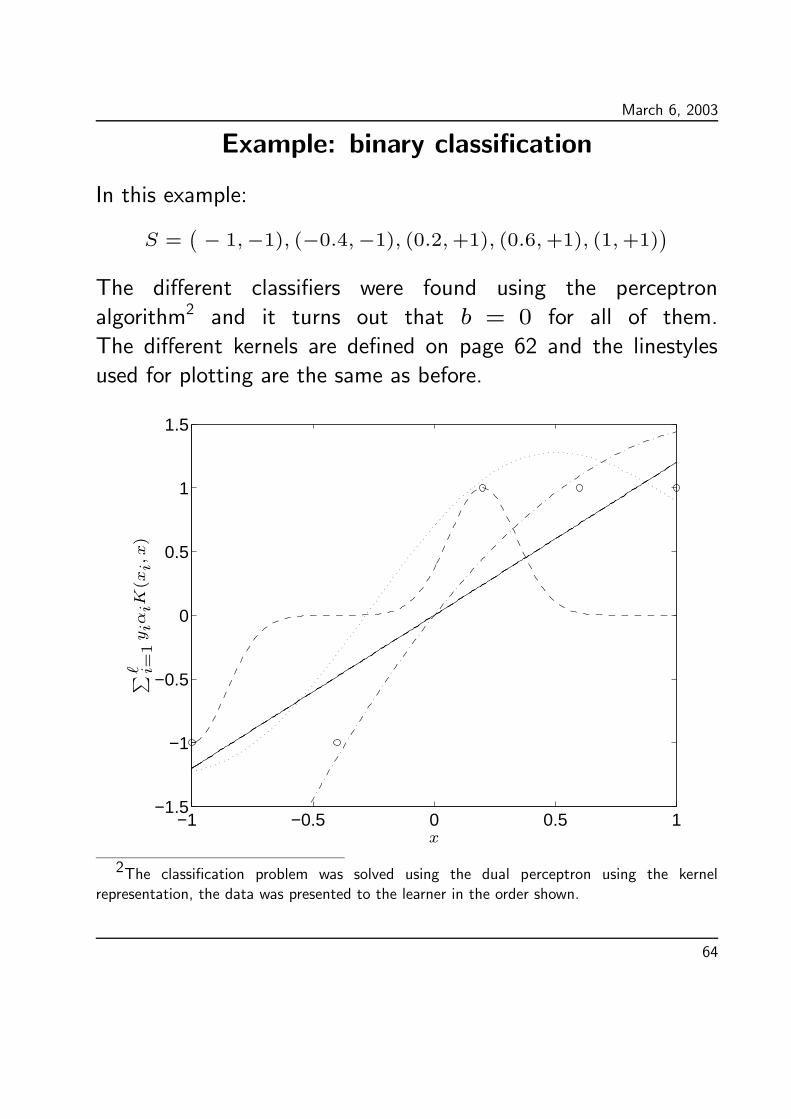
Example: binary classification
In this example:
S =(
− 1,−1), (−0.4,−1), (0.2,+1), (0.6,+1), (1,+1))
The different classifiers were found using the perceptron
algorithm2 and it turns out that b = 0 for all of them.
The different kernels are defined on page 62 and the linestyles
used for plotting are the same as before.
−1 −0.5 0 0.5 1−1.5
−1
−0.5
0
0.5
1
1.5
PSfrag replacements
∑
` i=1yiαiK
(xi,x)
x
2The classification problem was solved using the dual perceptron using the kernel
representation, the data was presented to the learner in the order shown.
64
March 6, 2003
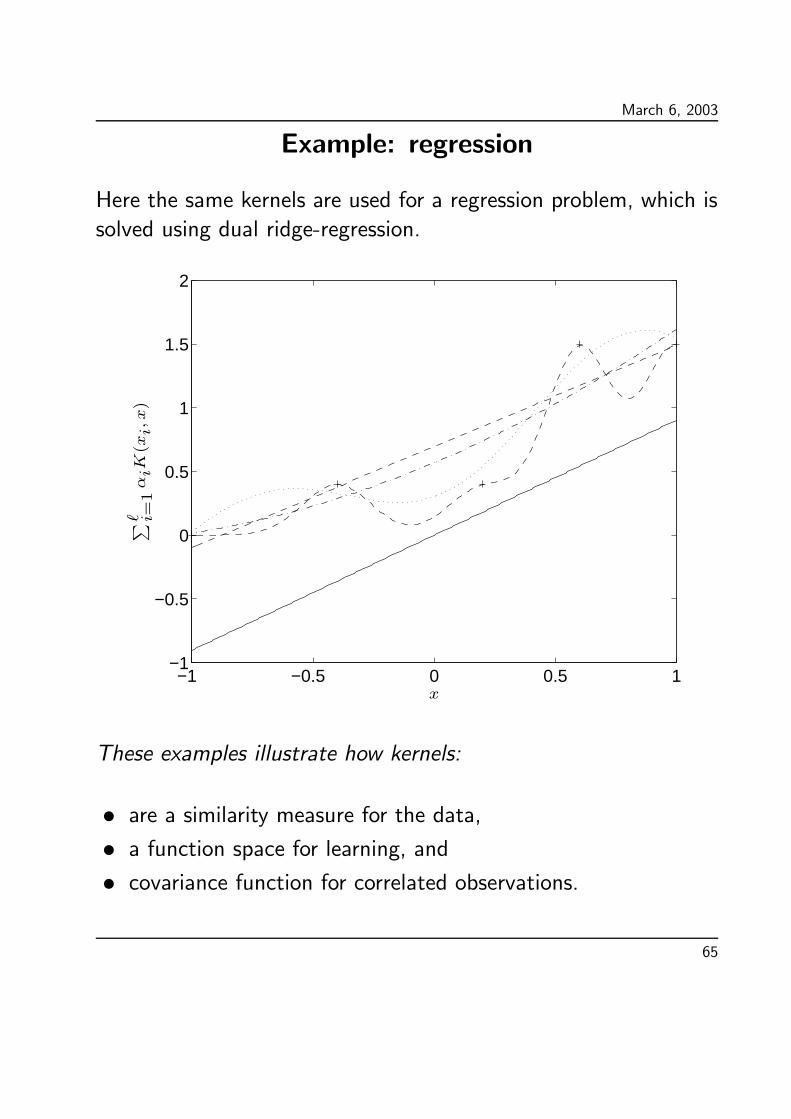
Example: regression
Here the same kernels are used for a regression problem, which is
solved using dual ridge-regression.
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
1.5
2
PSfrag replacements
∑
` i=1αiK
(xi,x)
x
These examples illustrate how kernels:
• are a similarity measure for the data,• a function space for learning, and• covariance function for correlated observations.
65

March 6, 2003
Similarly the regression problem becomes to find ` real numbers
α1, α2, . . . , α` such that f(xi) ≈ yi for i = 1, 2, . . . , `
where yi, i = 1, 2, . . . , ` are given outputs values.
In this context we also consider the space of all functions
a(x) =
N∑
i=1
aiφi(x)
where ai ∈ R and denote it by H. We can define for any twofunctions a(x) =
∑Ni=1 aiφi(x) and b(x) =
∑Ni=1 biφi(x)
their inner product as the value
N∑
i=1
aibi.
Thus H becomes an inner product space and in fact a Hilbert
space (since it will also be complete). We denote this inner
product by⟨
a(x) · b(x)⟩
H and define the corresponding norm:
‖a(x)‖H =⟨
a(x) · a(x)⟩1/2
H =(
N∑
i=1
a2i
)1/2
66

March 6, 2003
Note that according to these definitions we have
1.⟨
K(xi,x) ·K(xj,x)⟩
H=⟨∑N
k=1 φk(xi)φk(x) ·∑N
k=1 φk(xj)φk(x)⟩
H=∑N
k=1 φk(xi)φk(xj) = K(xi,xj)
2. If f(x) =∑`
i=1 αiK(xi,x)
and g(x) =∑`
i=1 βiK(xi,x) then⟨
f(x) · g(x)⟩
H =∑`
i=1
∑`j=1 αiβjK(xi,xj) = α′Gβ
where α = (α1, . . . , α`)′, β = (β1, . . . , β`)
′ and G is an
` × ` Gram (kernel) matrix whose (i, j)-th element is the
kernel K(xi,xj). In particular ‖f(x)‖2H = α′Gα.
3.⟨
a(x) ·K(y,x)⟩
H=⟨∑N
i=1 aiφi(x) ·∑N
i=1 φi(y)φi(x)⟩
H=∑N
i=1 aiφi(y) = a(y)
A kernel with this last property is called a reproducing
kernel. Thus H is called a reproducing kernel Hilbert
space (RKHS).
The above definitions agree with those given on p. 38-40 in book
except in the book N = ∞ and the book further considers a
more general case where we introduce positive weight factors µi,
which above simply take the value 1.
67

March 6, 2003
Principle component analysis (PCA)
Let Φ denote a data matrix in feature space for ` data vectors
x1,x2, . . . ,x`, i.e. the i-th row of Φ is φ(xi)′.
Let Φ denote the corresponding matrix of centered data where
we have subtracted from the j-th component of φ(xi), i.e.
φi(xi), the average value of that component over the dataset so
that the (i, j)-the element of Φ is
φj(xi)− 1`
∑
i=1
φj(xi)
In matrix notation we have that
Φ = Φ− 1`ee
′Φ
where e denotes a column vector of ` 1-elements. This implies
that
ΦΦ′= ΦΦ
′ − 1`ee
′ΦΦ
′ − ΦΦ′1`ee′+ 1
`ee′ΦΦ
′1`ee
′
and shows how we can obtain the Gram matrix from features
in centered form from the Gram matrix with its data in original
form.
68

March 6, 2003
We are now interested in extracting from the centered feature
vectors a new feature vector which is a linear combination of
the original features but with the additional property that the
variance in these new feature values is as large as possible. In
this way the new feature is to incorporate as much information
as possible from older features. We refer to it as a principle
component of the data. Thus we are interested in finding a
weight vector w, s.t. ‖w‖2 = 1 but
1`
⟨
Φw · Φw⟩
= w′1`ΦΦ
′w
is maximized3. Note that 1`Φ
′Φ is the covariance of the original
features.
The solution to the above problem is well known. We choose w
as the eigenvector of the covariance matrix that corresponds to
the largest eigenvalue λmax and normalize it so that ‖w‖2 = 1.
Then w′1`Φ′Φw = w′λmaxw = λmax, i.e. the variance of
the new feature will be λmax and this is the largest possible
variance.
3Compare this with the classification problem where we are interested in finding a weightvector s.t. ‖w‖2 = 1 and such that
⟨
xi ·w⟩
> 0 for all xi data vectors in the +-class
and⟨
xi ·w⟩
< 0 for all xi data vectors in the −-class. In that problem we also includedan offset b but if we work with centered data the offset value will in many cases become 0.Also compare it with the regression problem where we are interested in finding the weight
vector s.t.⟨
xi ·w⟩
≈ yi for some output values yi, i = 1, . . . , `.
69
March 6, 2003
Our main problem is however that in many cases we do not
know the new feature vectors explicitly and thus cannot compute
their average values nor the covariance matrix. We do however
know the Gram matrix ΦΦ′ whose (i, j)-th element is the kernelk(xi,xj) and can therefore also calculate the Gram-matrix of
the centered feature values as shown above.
We also have the following result:
• If λ is a non-zero eigenvalue of the matrix ΦΦ′with
eigenvector α then λ is also a non-zero eigenvalue of the
matrix Φ′Φ with eigenvector w = Φ
′α, since
ΦΦ′α = λα ⇒ Φ
′Φ(Φ′α) = λ(Φ′α).
• Conversely if λ is a non-zero eigenvalue of the matrix Φ′Φwith eigenvector w then λ will also be a non-zero eigenvalue
of the matrix ΦΦ′with eigenvector α = Φw.
• Note that the matrices Φ′Φ and ΦΦ′will in general be of
different size so that one will have more eigenvalues than
the other. The result above implies that all such additional
eigenvalues will be 0.
70

March 6, 2003
We can now calculate the largest eigenvalue λmax of the
covariance matrix 1`Φ
′Φ by calculating the eigenvalues of 1
`G,
where G denotes the Gram matrix ΦΦ′. Let αmax denote
the corresponding eigenvector. Since we want to normalize w
s.t.⟨
w ·w⟩
= 1 and w = Φ′α this means that we want to
normalize α s.t.
α′ΦΦ
′α = α
′`λmaxα = `λmaxα · α = 1
i.e. such that ‖α‖2 = 1/√`λmax.
We can however in general not calculate w for the expression
w = Φ′α since we do not know the feature vector explicitly.
This is analogous to the situation in kernel classification and
regression and we can deal with it in the same way, i.e. for a new
x we calculate the corresponding feature value as
∑
i=1
K(xi,x)αi
where αi is the i-the component of the eigenvector α after it
has been normalized (as shown above) and K(z,x) is the kernel
value corresponding to centered feature values.
In particular, the vector of the feature principal component values
71

March 6, 2003
of out data will be:
Gα = `λmaxα
(since α is an eigenvector of G and `λmax is the corresponding
eigenvalue), i.e. the eigenvector normalized so that its length is
`λmax1√
`λmax=√
`λmax
Note that this corresponds to the results on page 56.
It is, however, not clear how to proceed when if we want to
calculate the principle component for a new data vector. Also
note that the eigenvectors of the Gram matrix G will in general
not be sparse, i.e. most of the αi values will be non-zero. To
obtain a sparse α-vector we may have to modify our formulation
in some way. Such modified principle components are called
sparse principle components.
We do not necessarily restrict our attention only to the extracted
feature corresponding to the largest variance. Another feature
may be extracted from the eigenvector of 1`G corresponding to
the second largest eigenvalue. This second feature is uncorrelated
with the first feature and so incorporates information ignored by
the first feature. We call this second feature a second principle
component. Similarly, we can extract a third principle component
and so on.
72

March 6, 2003
Note that the total variance in the original data after it has been
transformed into the feature space is the sum of the diagonal
entries of the covariance matrix 1`Φ
′Φ. We can however not
calculate this metric if the features are not explicitly known.
But it can be shown that this sum is the same as the sum of
the diagonal entries of he matrix 1`G which can be calculated
from the kernels and is also equal to the sum of the eigenvalues
of this matrix. Thus by comparing the sum of the largest p
eigenvalues, say, with the total variance, we can see how much of
the information in the original data is incorporated into the first
p principle components in feature space.
The following MATLAB function performs the calculationsdescribed so far:
function [P,Pvar,totvar] = principalfeatures(G,p);
%PRINCIPLEFEATURES
% usage: [P,Pvar,totvar] = principalfeatures(G,p);
% P are the principle components
% Pvar the corresponding eigenvalues and totvar is the total variance
% G is the Gram matrix and p the number of principle components
ell = size(G,1);
Gbar = ((1/ell)*ones(ell,1))*(ones(1,ell)*G);
Gbar = G - Gbar - ((G - Gbar)*ones(ell,1))*((1/ell)*ones(1,ell));
[V,Lambda] = eigs((1/ell)*Gbar,p);
P = V*sqrt(ell*Lambda);
Pvar = diag(Lambda);
totvar = (1/ell)*sum(diag(Gbar));
% make sure that the largest eigenvalues are first!
[dummy,I] = sort(-Pvar);
Pvar = Pvar(I);
P = P(:,I);
73
March 6, 2003
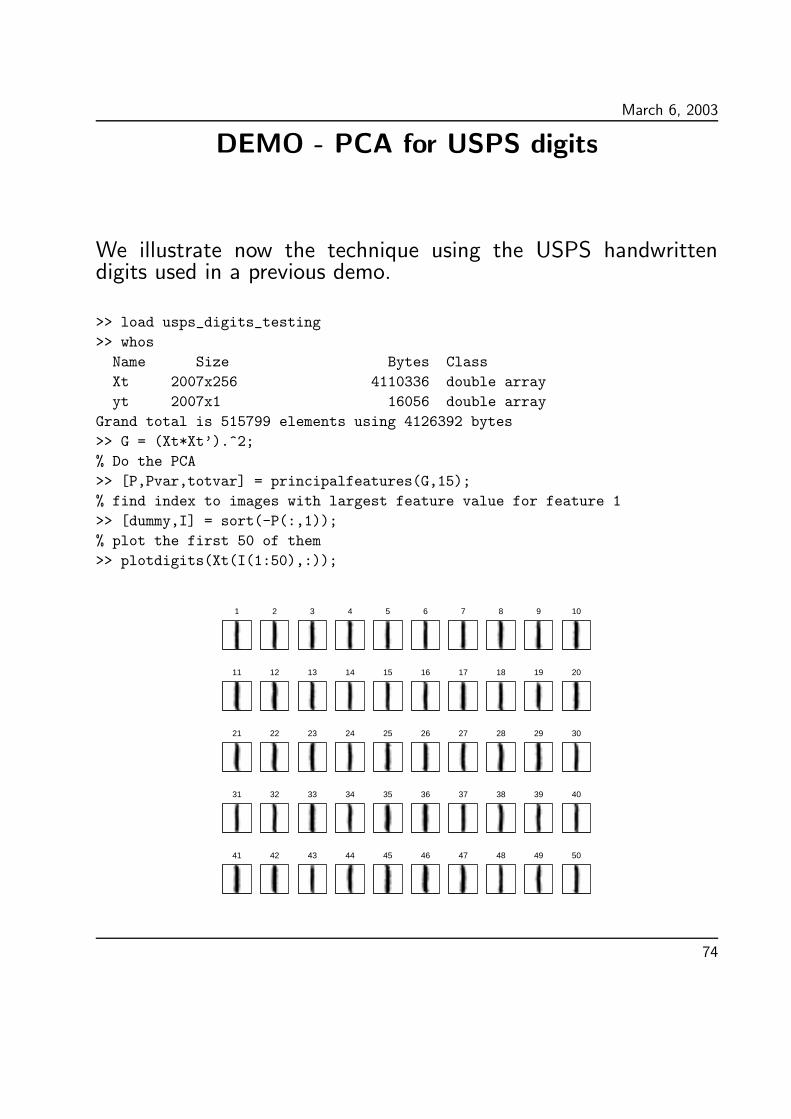
DEMO - PCA for USPS digits
We illustrate now the technique using the USPS handwrittendigits used in a previous demo.
>> load usps_digits_testing
>> whos
Name Size Bytes Class
Xt 2007x256 4110336 double array
yt 2007x1 16056 double array
Grand total is 515799 elements using 4126392 bytes
>> G = (Xt*Xt’).^2;
% Do the PCA
>> [P,Pvar,totvar] = principalfeatures(G,15);
% find index to images with largest feature value for feature 1
>> [dummy,I] = sort(-P(:,1));
% plot the first 50 of them
>> plotdigits(Xt(I(1:50),:));
1 2 3 4 5 6 7 8 9 10
11 12 13 14 15 16 17 18 19 20
21 22 23 24 25 26 27 28 29 30
31 32 33 34 35 36 37 38 39 40
41 42 43 44 45 46 47 48 49 50
74

March 6, 2003
What if we skip every 40-th image and so show a sample of allimages sorted by the first principle component feature value:
>> plotdigits(Xt(I(1:40:end),:));
1 2 3 4 5 6 7 8 9 10
11 12 13 14 15 16 17 18 19 20
21 22 23 24 25 26 27 28 29 30
31 32 33 34 35 36 37 38 39 40
41 42 43 44 45 46 47 48 49 50
Notice that at the other end of the scale we have only zeros!Let’s try another kernel (monomial order 5):
>> G = (Xt*Xt’).^5;
>> [P,Pvar,totvar] = principalfeatures(G,15);
>> [dummy,I] = sort(-P(:,1));
>> plotdigits(Xt(I(1:40:end),:));
This time the zeros are first:
1 2 3 4 5 6 7 8 9 10
11 12 13 14 15 16 17 18 19 20
21 22 23 24 25 26 27 28 29 30
31 32 33 34 35 36 37 38 39 40
41 42 43 44 45 46 47 48 49 50
75

March 6, 2003
Finally, let us plot the images with the highest feature value forall 15 principle components extracted using a order 2 monomialkernel:
>> G = (Xt*Xt’).^2;
>> [P,Pvar,totvar] = principalfeatures(G,15);
>> Pvar
Pvar =
1.0e+03 *
4.8461
2.4100
1.6495
1.2537
1.1182
1.0137
0.8469
0.7460
0.6618
0.6380
0.5479
0.4504
0.4491
0.4129
0.3808
>> for i=1:15, [dummy,I] = sort(P(:,i)); Iext(i,:) = [I(1) I(end)]; end
>> figure(1); plotdigits(Xt(Iext(:,1),:),yt(Iext(:,1)),(1:15)’);
>> figure(2); plotdigits(Xt(Iext(:,2),:),yt(Iext(:,2)),-(1:15)’);
0(1) 9(2) 0(3) 8(4) 3(5) 0(6) 4(7) 2(8) 6(9) 5(10)
1(11) 2(12) 3(13) 0(14) 3(15)
1(−1) 6(−2) 0(−3) 2(−4) 6(−5) 2(−6) 7(−7) 9(−8) 9(−9) 5(−10)
6(−11) 3(−12) 7(−13) 4(−14) 5(−15)
Notice that almost all digits are represented by the first 15 PC.
76
March 6, 2003
PCA - unsupervised learning
In general PCA may be regarded as an unsupervised learning
technique.
Classroom discussion on Kernel PCA in kernel design.
77

March 6, 2003
Designing kernels
Designing a kernel corresponds to choosing a:
• similarity measure for the data,• linear representation of the data,• function space for learning,• covariance function for correlated observations.
In general, the choice of kernel reflects the designer’s knowledge
about the problem and its solution.
There is no free lunch in kernel choice!
78













![start [leon.bottou.org] - SupportVectorMachineSolversThe Reproducing Kernel Hilbert Spaces theory (Aronszajn, 1944) precisely states which kernel functions correspond to a dot product](https://static.fdocuments.in/doc/165x107/60fc30e46e668063a1201713/start-leon-supportvectormachinesolvers-the-reproducing-kernel-hilbert-spaces.jpg)




