Karljoh an Lundin Palm e rius Norrk öping Vis ualization ...
1
Appl ications CFD Sim ulat ion Th e SH ARC aircraft is an experim ental unm anned ae rial ve h icl e (UAV). In th is exam pl e th e air flow from a com putational fluid dynam ics sim ulation (CFD) is explored using m ulti-m odal inte raction. W h il e onl y s im pl e properties can be re nde re d vis uall y w ith out clutte ring th e dis play, th e h aptic feedback provide continuous representations of th e data and ph ys ical guidance th rough outth e volum e . H eartBlood-flow Modern MRI-scanners are capabl e of aq uiring anim ated blood-flow data from w ith ing a beating h um an h eart. Both th e poor tissue contrast of th is k ind of data and th e fact th at th e noisiness of MRI data m ak e s autom atic extraction of fe ature s difficult, m ak e s it an inte re s ting targe t for m ulti-m odal m e th ods . Th e h aptic feedback helps the radiologis t understand th e flow and guides th e e xploration both ph ysicall y and m entall y. H aptic M od e F AST AND H IGH P RECISIO N V O LUM E H APTICS K arl johan Lundin Pal m e rius Norrk öping V is ual iz at ion and Int e ract ion Studio L ink öping Unive rsity, Swe de n Proxy-based Vol um e H aptics Proxy-based m eth ods for volum e h aptics use a proxy to internall y represent th e h aptic probe. Th e h aptic beh aviour is controll ed by m oving th e proxy and th e force feedback is calculated from a virtual spring-dam per connecting th e proxy and th e probe. Prim itive s Solve r Th e proxy position th at represents th e h aptic feedback th rough th e virtual spring-dam per for each tim e fram e is found by balancing th e force feedback from th e spring- dam per againstth e force from th e prim itives. Th is is done by th e solvers. H igh Precision Anal yth ical Solve r We h ave designed an anal ytical m eth od for solving th e balancing eq uation and s o find th e pos ition of th e proxy. Th is s olve r m ak e s us e of th e com m on situation w h ere h aptic prim itives are in configurations th at produces orth ogonal cons traints . Th e anal ytical solver is based on iterative m ovem ents th e proxy point in accordance w ith th e h aptic prim itives in turn. During th ese iterations th e proxy position represents th e force exerted by th e appl ie d h aptic prim itive s , onto th e curre ntl y processed prim itive. General Num e rical Solve r If th e orth ogonal ity re q uire m e nt for th e anal ytical s olve r is not fulfill ed, th e s olve r fail s and th e system needs to fall back on a m ore general solver th at is capabl e of h andl ing any com bination of h aptic prim itives, even non- orth ogonal configurations. Th is is im pl em ented using a steepest descent m inim ization of th e balancing be tw e e n th e fe e dback and th e force from th e prim itives. Vol um e tric Data Th e volum etric data at th e probed position is extracted to control th e param eters of th e h aptic prim itives, th us indirectl y controll ing th e h aptic fe e dback . H aptic Prim itive s Th e h aptic prim itive s configure d from th e volum e tric data prope rtie s de fine th e local h aptic be h aviour w h ich th e n re fl e cts th e local data in th e volum e. Depending on w h ich prim itives h ave been sel e cte d as a re pre s e ntation of th e data, and depending on h ow th eir param eters are controll e d, th e re s ulting h aptic m ode produces different h aptic beh aviour. Each prim itive h as an individual strength , direction and position. Plane Constraint Th e plane prim itive is a 1D constraint, used to s im ulate s urface s . L ine Constraint The l ine prim itive is a 2D constraint, follow ing th e "be ad on a s tring" m e taph ore . PointConstraint Th e point prim itive is a 3D constraint, providing a resistance to m otion in any direction. Directed Force Th e directed force prim itive generates a force is th e defined direction. Procedure 1 Putproxy atprobe position — ze ro force fe e dback 2 M ove proxy in response to force prim itives 3 M ove proxy in response to plane prim itives 4 M ove proxy in response to l ine prim itives 5 Move proxy in response to pointprim itives Procedure 1 Putproxy atprobe position 2 Initial ize step l e ngth 3 Estim ate residual force and m ove th e proxy th e step l ength in th e dire ction of th e re s idual force 4 If th e propagation ch anged direction m ore th an 9 0 degrees, low er step l e ngth 5 Repeat 3–4 until residual or step l ength is low er th an th e m ach ine epsilon
Transcript of Karljoh an Lundin Palm e rius Norrk öping Vis ualization ...

Applications
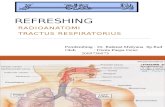
CFD Sim ulation
Th e SH ARC aircraft is an
experim ental unm anned aerial
veh icle (UAV). In th is exam ple
th e air flow from a com putational
fluid dynam ics s im ulation (CFD)
is explored us ing m ulti-m odal
interaction. W h ile only
s im ple propertie s can be
rendered visually w ith out
cluttering th e display, th e
h aptic fe edback provide
continuous repre s entations
of th e data and ph ys ical guidance th rough out th e volum e .
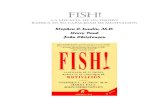
H eart Blood-flow
M odern M RI-scanners are capable of
aq uiring anim ated blood-flow data
from w ith ing a beating h um an h eart.
Both th e poor tis sue contrast of th is
k ind of data and th e fact th at th e
nois ine s s of M RI data m ak e s
autom atic extraction of feature s
difficult, m ak e s it an intere sting target
for m ulti-m odal m eth ods . Th e h aptic
fe edback h elps th e radiologist
understand th e flow and guide s th e
exploration both ph ys ically and
m entally.
H aptic M ode
FAST AND H IGH PRECISION VOLUME H APTICS
Karljoh an Lundin Palm e rius
Norrk öping Vis ualiz ation and Inte raction Studio
Link öping Unive rs ity, Sw e de n
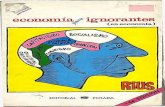
Proxy-based Volum e H aptics
Proxy-bas ed m eth ods for volum e h aptics us e a
proxy to internally repre s ent th e h aptic probe . Th e
h aptic be h aviour is controlled by m oving th e
proxy and th e force fe edback is calculated from a
virtual spring-dam per connecting th e proxy and
th e probe .
Prim itives Solver
Th e proxy pos ition th at repre s ents th e h aptic fe edback th rough th e virtual spring-dam per for each tim e fram e is found by balancing th e force fe edback from th e spring-
dam per against th e force from th e prim itive s . Th is is done by th e solvers .
H igh Precision Analyth ical Solver
We h ave de s igned an analytical m eth od for solving th e balancing e q uation
and so find th e pos ition of th e proxy. Th is solver m ak e s us e of th e com m on
s ituation w h e re h aptic prim itive s are in configurations th at produce s
orth ogonal constraints .
Th e analytical solver is bas ed on iterative m ovem ents th e proxy point in
accordance w ith th e h aptic prim itive s in turn. During th e s e iterations th e
proxy pos ition repre s ents th e force exerted by th e applied h aptic prim itive s ,
onto th e currently proce s s ed prim itive .
General Num erical Solver
If th e orth ogonality re q uirem ent for th e analytical solver is not fulfilled,
th e solver fails and th e system ne eds to fall back on a m ore general solver
th at is capable of h andling any com bination of h aptic prim itive s , even non-
orth ogonal configurations . Th is is im plem ented us ing a ste epe st de scent
m inim ization of th e balancing betw e en th e fe edback and th e force from th e
prim itive s .
Volum etric Data
Th e volum etric data at th e probed pos ition is extracted to
control th e param eters of th e h aptic prim itive s , th us
indirectly controlling th e h aptic fe edback .
H aptic Prim itives
Th e h aptic prim itive s configured from th e volum etric data propertie s define th e
local h aptic be h aviour w h ich th en reflects th e local data in th e volum e .
Depending on w h ich prim itive s h ave be en s elected as a repre s entation of th e
data, and depending on h ow th e ir param eters are controlled, th e re sulting
h aptic m ode produce s different h aptic be h aviour. Each prim itive h as an
individual strength , direction and pos ition.
Plane Constraint
Th e plane prim itive is a 1D constraint, us ed to
s im ulate surface s .
Line Constraint
Th e line prim itive is a 2D constraint, follow ing th e
"bead on a string" m etaph ore .
Point Constraint
Th e point prim itive is a 3D constraint, providing a
re s istance to m otion in any direction.
Directed Force
Th e directed force prim itive
generate s a force is th e
defined direction.
Procedure
1 Put proxy at probe pos ition — zero force fe edback
2 M ove proxy in re spons e to force prim itive s
3 M ove proxy in re spons e to plane prim itive s
4 M ove proxy in re spons e to line prim itive s
5 M ove proxy in re spons e to point prim itive s
Procedure
1 Put proxy at probe pos ition
2 Initialize step length
3 Estim ate re s idual force and m ove th e proxy th e step length in
th e direction of th e re s idual force
4 If th e propagation ch anged direction m ore th an 9 0 degre e s ,
low er step length
5 Repeat 3– 4 until re s idual or step length is low er th an th e
m ach ine eps ilon