June 2 nd 2010 Line Tracking & Mission to Mars Embedded Motion Control Group 1 Rene Thijssen Luke...
6
June 2 nd 2010 Line Tracking & Mission to Mars Embedded Motion Control Group 1 Rene Thijssen Luke Lathouwers Maarten van Stuijvenberg Roel ten Have Bastian Eenink
-
Upload
griffin-golden -
Category
Documents
-
view
214 -
download
0
Transcript of June 2 nd 2010 Line Tracking & Mission to Mars Embedded Motion Control Group 1 Rene Thijssen Luke...

June 2nd 2010Line Tracking & Mission to Mars
Embedded Motion Control
Group 1Rene ThijssenLuke LathouwersMaarten van StuijvenbergRoel ten HaveBastian Eenink

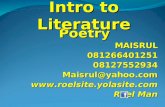
Line Tracking – Hardware DesignOverview functionality (I/O per RCX):
• Two light sensors are used to track the line• Both light sensors are positioned above the line
• Encoders for steering and distance measurement
A 1B RCX1 2 C 3A 1B RCX2 2 C 3
Light sensor left
Light sensor right
Steering encoder
Distance encoder
IR
Distance motor
Steering motor

Line Tracking – Software• Callibration
• Measure the intensity of light and dark between the surface and the line.
• The treshold is the average between the two measurements.
• Performance• If one light-sensor goes of the line, the Mars Rover steers back in
opposite direction.• When both light-sensors are back on the line, the Mars Rover steers
straigth forward. This minimizes the number of corrections.
• Steering-angle • Controlled by a P-controller to be able to steer in different angles.
• Distance measurement• The motor-encoder measures the number of encoder increments.• The measured increments are converted to millimeters after the
end of the line is reached.

Line Tracking – Software

Mission to Mars – Strategy
• Scan the area for lakes• Raw data of the light sensors is used to achieve a
higher accuracy.• Calibration and measurement of the light sensors every
250 ms.• A driving pattern is designed to scan the area of Mars
effectivly.

Mission to Mars – Strategy
• Overall progress• Edge detection and driving pattern is working• The earth computer can read coördinates from the camera • Approaching lakes by received coördinates (work in
progress)• Motion control for driving, steering and temperature
• To do:• Finishing approaching lakes by received coördinates• Link sub-programms• Testing and debugging