Joint gain/phase and mutual coupling array calibration technique … · Z =CΓ. (4) For a linear...
10
Joint gain/phase and mutual coupling array calibration technique with single calibrating source Citation for published version (APA): Chen, W., Lie, J. P., Ng, B. P., Wang, T., & Er, M. H. (2012). Joint gain/phase and mutual coupling array calibration technique with single calibrating source. International Journal of Antennas and Propagation. https://doi.org/10.1155/2012/625165 DOI: 10.1155/2012/625165 Document status and date: Published: 01/01/2012 Document Version: Publisher’s PDF, also known as Version of Record (includes final page, issue and volume numbers) Please check the document version of this publication: • A submitted manuscript is the version of the article upon submission and before peer-review. There can be important differences between the submitted version and the official published version of record. People interested in the research are advised to contact the author for the final version of the publication, or visit the DOI to the publisher's website. • The final author version and the galley proof are versions of the publication after peer review. • The final published version features the final layout of the paper including the volume, issue and page numbers. Link to publication General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. • Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal. If the publication is distributed under the terms of Article 25fa of the Dutch Copyright Act, indicated by the “Taverne” license above, please follow below link for the End User Agreement: www.tue.nl/taverne Take down policy If you believe that this document breaches copyright please contact us at: [email protected] providing details and we will investigate your claim. Download date: 20. Mar. 2020
Transcript of Joint gain/phase and mutual coupling array calibration technique … · Z =CΓ. (4) For a linear...

Joint gain/phase and mutual coupling array calibrationtechnique with single calibrating sourceCitation for published version (APA):Chen, W., Lie, J. P., Ng, B. P., Wang, T., & Er, M. H. (2012). Joint gain/phase and mutual coupling arraycalibration technique with single calibrating source. International Journal of Antennas and Propagation.https://doi.org/10.1155/2012/625165
DOI:10.1155/2012/625165
Document status and date:Published: 01/01/2012
Document Version:Publisher’s PDF, also known as Version of Record (includes final page, issue and volume numbers)
Please check the document version of this publication:
• A submitted manuscript is the version of the article upon submission and before peer-review. There can beimportant differences between the submitted version and the official published version of record. Peopleinterested in the research are advised to contact the author for the final version of the publication, or visit theDOI to the publisher's website.• The final author version and the galley proof are versions of the publication after peer review.• The final published version features the final layout of the paper including the volume, issue and pagenumbers.Link to publication
General rightsCopyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright ownersand it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights.
• Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal.
If the publication is distributed under the terms of Article 25fa of the Dutch Copyright Act, indicated by the “Taverne” license above, pleasefollow below link for the End User Agreement:www.tue.nl/taverne
Take down policyIf you believe that this document breaches copyright please contact us at:[email protected] details and we will investigate your claim.
Download date: 20. Mar. 2020

Hindawi Publishing CorporationInternational Journal of Antennas and PropagationVolume 2012, Article ID 625165, 8 pagesdoi:10.1155/2012/625165
Research Article
Joint Gain/Phase and Mutual Coupling Array CalibrationTechnique with Single Calibrating Source
Wei Chen,1 Joni Polili Lie,2 Boon Poh Ng,3 Tao Wang,3 and Meng Hwa Er3
1 Eindhoven University of Technology, 5600 MB Eindhoven, The Netherlands2 Temasek Laboratories, NTU, Singapore3 School of Electrical and Electronic Engineering, NTU, Singapore
Correspondence should be addressed to Joni Polili Lie, [email protected]
Received 9 July 2012; Revised 19 September 2012; Accepted 20 September 2012
Academic Editor: Hon Tat Hui
Copyright © 2012 Wei Chen et al. This is an open access article distributed under the Creative Commons Attribution License,which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
An iterative-based method for joint gain/phase and mutual coupling array calibration is proposed in this paper. It estimates thearray gain/phase and mutual coupling coefficients with a set of simultaneous equations formed by using the beam pattern propertyof the array. Only one calibrating source with known direction is requiblue to obtain the unique estimate. The effectiveness of thisapproach is illustrated by simulation results and by experimental data collected with an antenna array operating in high-frequencyradio band.
1. Introduction
Smart antenna technology is widely used in mobile commu-nication. In a Smart Antenna System (SAS), an antenna arrayis used in the base station to transmit and receive the mobile’ssignal directionally so that interferences are rejected and thesystem’s channel capacity is enhanced. But in many practicalsituations, the performance of the antenna array is degradeddue to gain/phase imbalances between the array sensors,unknown mutual coupling coefficients, and unknown sensorlocations. This implies that an estimate of the true arraymanifold is necessary before the processing of the array datacan be carried out. In fact, most of the array processingalgorithms available in the literature, such as the MUSICdirection finding algorithm [1] and the minimum-variancedistortionless response (MVDR) adaptive beamformingalgorithm [2], are devised under the assumption that thearray manifold of the array processing system is knownexactly. Therefore, antenna array calibration is indispensablefor estimating the array manifold accurately. Antenna arraycalibration mainly compensates for the following factors,namely, sensor location uncertainty, gain/phase mismatchbetween array sensors, and mutual coupling effects betweenarray sensors.
There are several methods for array calibration. Thefirst type of methods uses signals from known sources andknown directions for calibration. Friedlander and Weiss [3]presented a method for estimating the gain and phase ofeach sensor and the mutual coupling in the receiving array,but it relies on the calibrating signals from several sources(although it does not require to know their actual impingingdirections). The second type of methods injects an equalphase signal to all channels of the antenna array. In [4],Ertel et al. compensated the gain and phase imbalance in theuplink system of an antenna array but without consideringthe effects of mutual coupling. The third type of methodsuses network analyzer for calibration. Dandekar et al. [5]gave a mathematical model of smart antenna and calibratedthe smart antenna array by network analyzer measurementsand computational electromagnetic (CEM) simulations. Butas an off-line method, it has limitations in compensatingmutual coupling effects which change due to thermal effects,the environment around the sensor array (e.g., the effect ofmetal objects near an antenna array on its beam pattern), andother factors. Therefore, this paper is motivated to attemptto suggest an alternative calibration technique to estimatethe array manifold parameters. Moreover, recent research onarray calibration can be found in [6, 7]. It is worth noting

2 International Journal of Antennas and Propagation
that the calibration methods discussed here refers to thecalibration method for the antenna array when it is in receivemode [8]. As widely reported in references [9–11], thereexists other alternative means for dealing with the mutualcoupling that belongs to mutual coupling compensationtechniques.
The basic idea of the technique presented in this paperis to form a set of linear equations using the null andpeak characteristics of the beam pattern, from which theerrors or the true steering vector that contains the manifoldinformation of the array sensors can be estimated. Theproposed technique only uses one calibrating source withknown direction to obtain the unique estimate. This paperis organized as follows. Section 2 contains the signal model.Section 3 describes the gain/phase calibration technique.Section 4 describes the joint gain/phase and mutual cou-pling calibration technique. Section 5 gives some simulationresults to show the performance of the proposed technique,as well as its application to experimental data collected withan antenna array operating in high-frequency band andSection 6 concludes the paper.
2. Signal Model
Consider an antenna array havingM sensors and the azimuthdirection of arrival of θ0 (measublue with respect to the arraynormal axis for the case of linear array), and let u0 = sin(θ0).In the ideal situation, the received signal of the array can bedescribed as
x(t) = v(u0)s(t) + n(t), (1)
where x(t) = [x0(t), x1(t), . . . , xM−1(t)]T and xm(t) denotesthe received signal at mth element of the array, s(t) is thetransmitted signal, v(u0) is the M × 1 steering vector for thedirection θ0, and n(t) is the noise vector.
However, under the practical conditions, the receivedsignal of the array may be described as
r(t) = Zv(u0)s(t) + n(t), (2)
Z = CGΦ, (3)
where C is the M ×M mutual coupling complex matrix, Gis the M ×M real diagonal matrix whose elements {gm}Mm=1represent the sensor gains, and Φ is an M × M complexdiagonal matrix whose elements {e jϕm}Mm=1 represent thesensor phases [12].
Let Γ = GΦ, where the M ×M complex diagonal matrixΓ represents the sensor gain/phase matrix. From (3), matrixZ is given by
Z = CΓ. (4)
For a linear uniform array, matrix C is a Toeplitz matrix. Fora uniform circular array, matrix C is a circulant matrix. Thispaper uses the properties of Toeplitz matrix and circulantmatrix (see [3, Lemmas 1, 2, and 3]) to calculate the mutualcoupling matrix C as well as the sensor gain/phase matrixΓ. It is worth noting that the assumption that the coupling
matrix C exhibits the Toeplitz and circulant matrix structurealso implies that the coupling between two adjacent arrayelements is independent of the presence of other nonadjacentarray elements. This also means the coupling matrix for anedge element is identical to that of an element located inthe center of the array. This condition is only true under theminimum scattering array principle [13].
3. Estimating the Gain/Phase Vector
3.1. The Characteristics of Beam Patterns. For the ideal con-dition expressed by (1), the covariance matrix of receivedsignals is
R = E[
x(t)xH(t)]
, (5)
where E[·] represents the expectation operation and thesuperscript “H” represents the conjugate transpose opera-tion.
The characteristics of the beam patterns are discussed asfollows for the uniform linear array and the uniform circulararray, respectively.
3.1.1. Uniform Linear Array. Decomposing the covariancematrix R, we can obtain the standard beam pattern that isexpressed as
BL(u : u0) = vH(u)Es, (6)
where Es is the M × 1 normalized eigenvector of thesignal subspace, which is expressed as Es = [1, e j2πdu0/λ, . . . ,e j(M−1)2πdu0/λ]T/
√M; v(u) is the M × 1 normalized steering
vector, which has the expression v(u) = e− j(M−1)2πdu/λ/√M ·
[1, e j2πdu/λ, . . . , e j(M−1)2πdu/λ]T ; d is the intersensor spacingand λ is the wavelength.
Moreover, in the u-space the beam pattern can be expre-ssed as
BL(u : u0) = 1M
sin((πMd/λ)(u− u0))sin((πd/λ)(u− u0))
. (7)
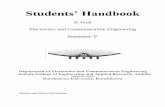
For the purpose of illustration, Figure 1 shows the beampattern of a 10-element uniform linear array with halfwavelength intersensor spacing and the direction of arrival is0◦. We can see that the beam pattern has one peak and M−1nulls. The peak of the pattern occurs when
u = u0, (8)
while the nulls (more detailed derivation and explanation onthe location of the nulls in the ULA beam pattern is available[14]) occur when
u = mλ
Md, m = 1, 2, . . . ,M − 1. (9)
3.1.2. Uniform Circular Array. Decomposing the covariancematrix R, we can get the uniform excitation beam patternthat is expressed by
Bc(ϕ : ϕ0
) = sH(ϕ)
Esc, (10)

International Journal of Antennas and Propagation 3B
eam
pat
tern
1
0.8
0.6
0.4
0.2
0
−0.2
−0.4−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1
sin(u)
Figure 1: Beam pattern of the uniform linear array (M = 10,d/λ =0.5,u0 = 0).
where Esc is the M × 1 uniformly eigenvector of the signalsubspace, which is expressed as Esc = [1, e j2πR cos(ϕ0−ϕ1)/λ, . . . ,e j2πR cos(ϕ0−(M−1)ϕ1)/λ]T/
√M; s(ϕ) is the M × 1 normalized
steering vector which is expressed as s(ϕ)=[1, e j2πR cos(ϕ−ϕ1)/λ,. . . , e j2πR cos(ϕ−(M−1)ϕ1)/λ]T/
√M; ϕ1 = 2π/M and λ is the
wavelength. R denotes the circular radius of the arraygeometry.
Since the polar angle is not consideblue here, we cansimplify the expression in [15]. In the ϕ-space, the beampattern is expressed as
Bc(ϕ : ϕ0
) =∞∑
m=−∞jmMe− jmMξJmM
(2πλρ)
, (11)
where JmM(x) is the Bessel function of the first kind of ordermM. The variables ξ and ρ have the following expressions,respectively:
cos ξ = cosϕ− cosϕ0[(cosϕ− cosϕ0
)2 +(sinϕ− sinϕ0
)2]1/2 ,
ρ = R×[(
cosϕ− cosϕ0)2 +
(sinϕ− sinϕ0
)2]1/2
= 2R× sin(ϕ− ϕ0
2
).
(12)
And in (11), the term J0((2π/λ)ρ) is the principle termwhile the other terms are the residuals. The main lobebehavior is adequately described by the term J0(·) [15]. Andif the interelement spacing on the arc dcir = 2πR/M satisfiesthe inequality
dcir <λ
2, (13)
then the residuals will be negligible.Hence, we can use J0((2π/λ)ρ) to describe the character-
istics of the standard beam pattern for uniform circular array.
Figure 2 shows the beam pattern of a 10-element uniformcircular array with one-third wavelength intersensor spacingon the arc and the looking direction is 0◦. We can get thebeam pattern value corresponding to any angle by the Besselfunction table [16].
The proposed technique for calibration is based on theknowledge of one calibrating source with known direction.We can use some values of the beam pattern to get a setof simultaneous equations for estimating the gain/phaseand mutual coupling matrix. In the following part of thispaper, we will use the peak and the nulls of beam patternfor uniform linear array’s calibration. The calibration foruniform circular array can be performed in a similar way asthe uniform linear array, by using other values of the beampattern.
3.2. Gain/Phase Calibration Technique. The true steeringvector at any look direction for a gain/phase perturbed arraycan be expressed as
v(u) = diag{v0(u)}g, (14)
where v0(u) is the nominal steering vector; g = [Γ11,Γ22, . . . ,ΓMM]T whose elements are the coefficients of the gain/phasemismatch; the superscript “T” represents the transposeoperation.
Moreover, from (8) and (9) we have the followingequations
EHs diag{v0(u0)}g = 1,
EHs diag
{v0
(u0 +
λ
Md
)}g = 0,
EHs diag
{v0
(u0 +
2λMd
)}g = 0,
...
EHs diag
{v0
(u0 +
(M − 1)λMd
)}g = 0.
(15)
Rewriting the above equations in matrix form, we obtain
Q1g = p1, (16)
where Q is an M ×M matrix given by
Q1 =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
EHs diag{v0(u0)}
EHs diag
{v0
(u0 +
λ
Md
)}
...
EHs diag
{v0
(u0 +
(M − 1)λMd
)}
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
, (17)
and p1 is a M × 1 vector given by
p1 = [1, 0, 0, . . . , 0, 0]T . (18)
As the nominal steering vectors according to different DOAare independent with each other, matrix Q1 is full rank and

4 International Journal of Antennas and Propagation
has an inverse matrix. The gain/phase mismatch vector g isgiven by
g = Q−11 p1. (19)
From (19), under asymptotic condition, the first element of gshould yield a value of one as the first array element is chosenas a reference element and constrained as one. However, inactual implementation, the data covariance matrix availableis not really perfect, especially when the number of snapshotstaken to form the covariance matrix is small. In this case, thefollowing constrained minimization formulation would bemore appropriate:
ming
∥∥Q1g− p1∥∥2
s.t. uT1 g = 1,
(20)
where ‖ · ‖2 denotes the 2-norm operation. Equation (20)yields the following solution:
g = Q−10 u1
(uT
1 Q−10 u1
)−1(1− uT
1 Q−10 p0
)+ Q−1
0 p0, (21)
where
Q0 = QH1 Q1
p0 = QH1 p1
u1 = [1, 0, 0, . . . , 0]T .
(22)
4. Jointly Estimating the Gain/Phase Vectorand Mutual Coupling Matrix
Once the DOA of the source is known, which means u0 isknown, reasonable estimates of Γ and C may be obtained byminimizing the cost function
Jc =
∥∥∥∥∥∥∥∥∥∥∥∥∥∥∥
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
EHs CΓv0(u0)
EHs CΓv0
(u0 +
λ
Md
)
...
EHs CΓv0
(u0 +
(M − 1)λMd
)
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
− p1
∥∥∥∥∥∥∥∥∥∥∥∥∥∥∥
2
. (23)
The proposed minimization algorithm is based on a two-stepprocedure. First, given C, we minimize Jc over the gain/phaseparameters. Then given Γ, we minimize Jc over the mutualcoupling matrix C components. These minimization stepscan be repeated until Jc converges.
4.1. Initialization
(i) Set the iteration counter to zero: k = 0.
(ii) Select initial values for the gain/phase matrix Γand initial value for the mutual coupling matrixC. Usually the initial values are based on someprevious knowledge (e.g., last measublue values orpblueictions based on the idealized model).
0 50 100 150 200
0
0.5
1
Angle
Bea
m p
atte
rn o
f u
nif
orm
cir
cula
r ar
ray
−200 −150 −100 −50−0.5
Figure 2: Beam pattern of the uniform circular array (M =10,dcir/λ = 1/3,ϕ0 = 0).
(iii) Compute the covariance matrix R from the discretetime-domain samples of the received signal at theantenna array.
(iv) Perform eigen-analysis and construct signal subspaceEs.
4.2. Two-Step Procedure
Step 1 (estimating the gain/phase vector). Fixing the matrixC, we now minimize Jc with respect to the gain and phase ofeach of the sensors. From (23), we have
Jc =∥∥Q11g− p1
∥∥2, (24)
where
Q11 =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
EHs C diag{v0(u0)}
EHs C diag
{v0
(u0 +
λ
Md
)}
...
EHs C diag
{v0
(u0 +
(M − 1)λMd
)}
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
. (25)
We can minimize (24) using the constrained minimizationformulation expressed by (20). The solution is similar to theformulation (21):
g = Q−101 u1
(uT
1 Q−101 u1
)−1(1− uT
1 Q−101 p01
)+ Q−1
01 p01,
(26)
where
Q01 = QH11Q11,
p01 = QH11p1,
u1 = [1, 0, 0, . . . , 0]T .
(27)

International Journal of Antennas and Propagation 5
Then, we can compute the gain-phase matrix Γk+1 from thevector g given by (26):
Γk+1 = diag(
g). (28)
Step 2 (estimating the mutual coupling matrix). In this step,we hold the sensor gain-phase fixed and find the mutualcoupling matrix that minimizes the cost function Jc. Usingthe lemmas [3] depicted in the appendix, we obtain
Jc =∥∥Q12c− p1
∥∥2, (29)
where
Q12 =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎣
EHs Q3(Γv0(u0))
EHs Q3
(Γv0
(u0 +
λ
Md
))
...
EHs Q3
(Γv0
(u0 +
(M − 1)λMd
))
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎦
, (30)
and c is the mutual coupling coefficients vector whoseelements are related to the coupling matrix C, as expressedby
ci = CH1i , i = 1, 2, . . . ,M. (31)
The formulation of Q3(·) is given by Lemma A.3 [3] in theappendix.
We can minimize (29) using the constrained minimiza-tion formulation expressed by (20). The solution is similarto the formulation in (21), which is,
c = Q−102 u1
(uT
1 Q−102 u1
)−1(1− uT
1 Q−102 p02
)+ Q−1
02 p02, (32)
where
Q02 = QH12Q12,
p02 = QH12p1,
u1 = [1, 0, 0, . . . , 0]T .
(33)
Then, we can reconstruct the mutual coupling matrix Ck+1
form the vector c given by (32).
4.3. Convergence Check. Here, we compute Jk+1c using the
estimated sensor gain-phase and the mutual coupling matrix.If Jkc − Jk+1
c > ε (ε is a preset threshold), then we will updatethe iteration counter k = k + 1 and continue with the two-step procedure. Otherwise, we will stop the process. Thealgorithm performs the iterations until Jc converges. Notethat at each step, the cost function should blueuce so that
J (0)c > J (1)
c > · · · > J (k)c ≥ 0. (34)
4.4. Extension to Azimuth-Elevation Case. Although the pro-posed calibration method is derived for linear geometry
array, the extension from azimuth-only (1D) to azimuth-elevation (2D) case is possible by reformulating the azimuth-elevation steering vector into its decoupled form [17, 18].Using this decoupled formulation, the proposed calibrationcan be applied individually on the coupling matrix associatedwith the azimuth as well as elevation components of thesteering vector.
5. Simulation and Experimental Results
To illustrate the behavior of the algorithm, consider anarrowband half-wavelength spaced uniform linear array of10 omnidirectional sensors. Noise components are complexwhite Gaussian with zero mean. The following parametersare used in the simulations:
SNR = 20 dB; Snapshots = 100; the known source’slocation: θ = 5◦; coupling coefficient: c = {1, 0.09,0.09, 0.06, 0.05, 0.03, 0.02, 0.01, 0.01, 0.02};coupling coefficients are independently distributedaccording to U(−0.05π, 0.05π).
gains: g={1, 1.0351, 0.9886, 1.0471, 1, 1.0233, 1.1614,1, 1, 1};phases: ϕ = {0◦,−215◦,−149◦,−14◦, 21◦, 3◦,−40◦,−40◦, 0◦, 0◦}.
In the presence of gain/phase imbalances and unknownmutual coupling coefficients, the ideal beam pattern charac-teristics of a uniform linear can no longer be observed. Thisis depicted clearly in Figure 3 for this particular realization.In comparison, we have also plotted the ideal beam patterncomputed given the gain/phase imbalances and mutualcoupling coefficients, as well as the after-calibration beampattern given by
BL(u : u0) = EHs CΓv(u), (35)
where C and Γ are the estimated coupling matrix andgain/phase imbalances. These results demonstrate that theproposed two-step procedure in Section 4.2 is effective inestimating jointly the gain/phase and coupling matrix thatsatisfies the beam pattern’s nulls and peak characteristics.
In addition, we have also tested the calibration result fordirection finding application by plotting the MUSIC spatialspectrum on the simulated test data that contains threesignals impinging from 50◦, 30◦, and −40◦.
Figure 4 shows the comparison of MUSIC spatial spectrabefore calibration, after calibration, and ideal spectrum forjoint gain/phase and mutual coupling calibration. It is clearthat before calibration the estimation of DOA is wrong, thespectrum is not acuity, and SNR is low. After calibration, theestimation of DOA is correct, the spectrum is acuity and verysimilar to the nominal MUSIC spectrum.
To demonstrate the statistical efficiency of the proposedcalibration, we perform the following Monte Carlo experi-ments. The 10-element uniform linear array described aboveis used with the same parameter setting. The data set for thecalibration contains only the calibrating source, while that

6 International Journal of Antennas and Propagation
0 0.5 1
0
Bea
m p
atte
rn (
dB)
Ideal beam patternBeam pattern before calibrationBeam pattern after calibration
−1 −0.5
−55
−50
−45
−40
−35
−30
−25
−20
−15
−10
−5
sin(θ)
Figure 3: Beam pattern estimates obtained before and after gain/phase calibration, as compablue to the ideal case.
0 0.5 10
5
10
15
20
25
30
35
40
45
Spat
ial s
pec
tru
m (
dB)
Ideal spatial spectrumSpatial spectrum before calibrationSpatial spectrum after calibration
−1 −0.5
Direction-of-arrival in sin(θ)
Figure 4: MUSIC spatial spectra obtained before and after jointgain/phase and mutual coupling calibration.
for the direction finding includes three far-field narrow bandemitters. The gains and phases as well as coupling matrixcoefficients are unchanged. We run 500 realization for eachfixed SNR, and repeat for various SNR values ranging from−20 dB to 20 dB in 5 dB step-size. The SNR is calculated asthe ratio of the received signal power and the noise power:SNR = [
∑k σ
2k ]/σ2
n , where σ2k and σ2
n are the kth receivedsignal power and noise power, respectively. The values of thesensor gains and phases were kept constant throughout these
0 5 10 15 20
SNR (dB)
RM
SE (
deg)
IdealBefore calibration
After calibrationCRB
−20 −15 −10 −510−2
10−1
100
101
102
Figure 5: RMSE of the DOA estimation versus SNR.
simulations. For each realization, we apply MUSIC-baseddirection finding method to estimate the DOA.
For each SNR, we obtain the average DOA estimationerror out of the 500 realizations and use them to compute theestimated root mean square error (RMSE). Figure 5 depictsthe RMSE plot versus SNR for the ideal (known gain/phaseand mutual coupling coefficients), as well as before and aftercalibration. It can be seen that the proposed algorithm hassignificantly improved the accuracy of the DOA estimationthrough accurate joint estimation of gain/phase and mutualcoupling coefficients. In addition, we have also includedthe Cramer-Rao Bound (CRB) plot of the DOA estimationunder the ideal condition. The CRB plot in Figure 5 depictsthe statistical lower bound of the DOA estimation underperfect calibration where the coupling matrix is known.While the RMSE plot under ideal case (known couplingmatrix) appears to converge to the CRB for high SNR case,the performance of the proposed calibration does not deviatefar from the CRB.
Lastly, we verify the calibration method experimentallyusing the data collected from a high frequency (HF) radioantenna array system. The measurement setup is describedin detail in [6], therefore it will not be repeated here.
We implement the calibration technique to calibratejointly the array gain/phase and mutual coupling coefficients.Unlike the calibration described in [6], we only need onecalibrating data set from the short-time Fourier transform(STFT) output that consists of single narrowband signal. It isimportant to note that although it is impossible to conduct acontrolled experiment in which only one calibrating signalis observed, it is possible to extract only the narrowbandcalibrating signal from the received signal using short-timefrequency analysis technique. Even in the congested nature ofHF band, we have demonstrated that it is possible to extractthe calibrating data set.

International Journal of Antennas and Propagation 7
0 0.5 1
0
5
10
15
20
25
30
Spat
ial s
pect
rum
(dB
)
Spatial spectrum before calibrationSpatial spectrum after calibration
Direction-of-arrival in sin(θ)
−10−0.5
−5
−1
Figure 6: MUSIC spatial spectra obtained before and after the pro-posed joint gain/phase and mutual coupling calibration.
After estimating jointly the gain/phase and mutual cou-pling coefficients, we applied the calibration result forplotting the MUSIC spatial spectrum on the data set thatcontains three narrowband signals. Figure 6 shows the spatialspectrum plots before and after the proposed calibration.Notice that, unlike the spatial spectra shown in [6, Figure 12],the spatial spectra shown here are plotted with respect tosin(θ) where the angle θ is measublue with respect to thearray normal axis.
It can be seen that although the proposed method doesnot include the array geometry calibration, all three DOAsare estimated effectively as indicated by the peaks in theplot located at −0.9219, 0.1719, and 0.6266, respectively.Furthermore, the estimation results are in agreement withthe results obtained using the method in [6]. This can beunderstood from the fact that the array geometry error isnegligible, as shown in array geometry calibration result (see[6, Figure 11(c)]).
6. Conclusion
In this paper, a calibration technique based on eigen-structure analysis and the beam pattern characteristics hasbeen used to obtain jointly the estimates of gain, phase, andmutual coupling parameters of the smart antenna system.The effectiveness of this method is illustrated by simulationresults, as well as experimental verification. Even thoughthe proposed method is developed under the assumptionthat the calibrating data contains only calibrating source ofknown direction with additive noise, it does not render theproposed method impractical since this requirement can beeasily overcome through prefiltering approach.
Appendix
Lemma A.1. For any M× 1 complex vector X and any M×Mcomplex diagonal matrix D one has
D ·X = Q1(X) · d, (A.1)
where the components of the M × 1 vector d and the M ×Mmatrix Q1(X) are given by
di = Dii, for i = 1, 2, . . . ,M;
[Q1(X)]i j = Xij · δi j , for i, j = 1, 2, . . . ,M.(A.2)
Lemma A.2. For any M× 1 complex vector X and any M×Mcomplex symmetric circulant matrix A, one has
A ·X = Q2(X) · a, (A.3)
where the elements of the L× 1 vector a are given by
ai = Ali, for i = 1, 2, . . . ,L, (A.4)
where L = M/2 + 1 when M is even and L = (M + 1)/2 whenM is odd. The M × L matrix Q2(X) is the sum of the followingfour M × L matrices:
[W1]pq ={Xp+q−1, p + q ≤M + 1,
0, otherwise
[W2]pq ={Xp−q+1, p ≥ q ≥ 2,
0, otherwise
[W3]pq ={XM+1+p−q, p < q ≤ l,
0, otherwise
[W4]pq ={Xp+q−M−1, 2 ≤ q ≤ l, p + q ≥M + 2,
0, otherwise,
(A.5)
where l =M/2 for even M and l = (M + 1)/2 for odd M.
Lemma A.3. For any M× 1 complex vector X and any M×Mbanded complex symmetric Toeplitz matrix A, one has
A ·X = Q3(X) · a, (A.6)
where the L× 1 vector a is given by
ai = A1i, for i = 1, 2, . . . ,L (A.7)
and L is the highest superdiagonal that is different from zero.The M × L matrix Q3(X) is given by the sum of the followingtwo M × L matrices
[W1]pq ={Xp+q−1, p + q ≤M + 1,
0, otherwise
[W1]pq ={Xp−q+1, p ≥ q ≥ 2,
0, otherwise.
(A.8)

8 International Journal of Antennas and Propagation
References
[1] R. O. Schmidt, “Multiple emitter location and signal param-eter estimation,” IEEE Transactions on Antennas and Propaga-tion, vol. 34, no. 3, pp. 276–280, 1986.
[2] J. Capon, “High-resolution frequency—wavenumber spec-trum analysis,” Proceedings of the IEEE, vol. 57, no. 8, pp. 1408–1418, 1969.
[3] B. Friedlander and A. J. Weiss, “Direction finding in thepresence of mutual coupling,” IEEE Transactions on Antennasand Propagation, vol. 39, pp. 273–284, 1991.
[4] R. B. Ertel, Z. Hu, and J. H. Reed, “Antenna array hardwareamplitude and phase compensation using baseband antennaarray outputs,” in Proceedings of the IEEE 49th VehicularTechnology Conference (VTC ’99), pp. 1759–1763, September1999.
[5] K. R. Dandekar, H. Ling, and G. Xu, “Smart antenna arraycalibration procedure including amplitude and phase mis-match and mutual coupling effects,” in Proceedings of the IEEEInternational Conference on Personal Wireless Communications,pp. 293–297, December 2000.
[6] B. P. Ng, J. P. Lie, M. H. Er, and A. Feng, “A practicalsimple geometry and gain/phase calibration technique forantenna array processing,” IEEE Transactions on Antennas andPropagation, vol. 57, no. 7, pp. 1963–1972, 2009.
[7] W. Keizer, “Fast and accurate array calibration using asynthetic array approach,” IEEE Transactions on Antennas andPropagation, vol. 59, pp. 4115–4122, 2011.
[8] H.-S. Lui, H. T. Hui, and M. S. Leong, “A note on the mutual-coupling problems in transmitting and receiving antennaarrays,” IEEE Antennas and Propagation Magazine, vol. 51, no.5, pp. 171–176, 2009.
[9] K. M. Pasala and E. M. Friel, “Mutual coupling effects andtheir reduction in wideband direction of arrival estimation,”IEEE Transactions on Aerospace and Electronic Systems, vol. 30,no. 4, pp. 1116–1122, 1994.
[10] H. T. Hui, “A practical approach to compensate for the mutualcoupling effect in an adaptive dipole array,” IEEE Transactionson Antennas and Propagation, vol. 52, no. 5, pp. 1262–1269,2004.
[11] C. K. E. Lau, R. S. Adve, and T. K. Sarkar, “Minimum normmutual coupling compensation with applications in directionof arrival estimation,” IEEE Transactions on Antennas andPropagation, vol. 52, no. 8, pp. 2034–2041, 2004.
[12] B. Friedlander, “A sensitivity analysis of the MUSIC algo-rithm,” IEEE Transactions on Acoustics, Speech, and SignalProcessing, vol. 38, no. 10, pp. 1740–1751, 1990.
[13] W. Kahn and H. Kurss, “Minimum-scattering antennas,” IEEETransactions on Antennas and Propagation, vol. 13, pp. 671–675, 1965.
[14] D. H. Johnson and D. E. Dudgeon, Array Signal Processing:Concepts and Techniques, Simon & Schuster, 1992.
[15] H. L. Van Trees, Optimum Array Processing, Part IV of Detec-tion, Estimation, and Modulation Theory, Wiley-Interscience,New York, NY, USA, 2002.
[16] I. A. S. Milton Abramowitz, Handbook of Mathematical Fun-ctions With Formulas, Graphs, and Mathematical Tables, DoverPublications, New York, NY, USA, 1965.
[17] B. H. Wang, H. T. Hui, and M. S. Leong, “Decoupled2D direction of arrival estimation using compact uniformcircular arrays in the presence of elevation-dependent mutualcoupling,” IEEE Transactions on Antennas and Propagation,vol. 58, no. 3, pp. 747–755, 2010.
[18] R. Goossens and H. Rogier, “A hybrid UCA-RARE/Root-MUSIC approach for 2-D direction of arrival estimation inuniform circular arrays in the presence of mutual coupling,”IEEE Transactions on Antennas and Propagation, vol. 55, no. 3,pp. 841–849, 2007.

Submit your manuscripts athttp://www.hindawi.com
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2013
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2013Part I
VLSI Design
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2013
ISRN Signal Processing
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2013
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2013
Mechanical Engineering
Advances in
Modelling & Simulation in EngineeringHindawi Publishing Corporationhttp://www.hindawi.com Volume 2013
Advances inAcoustics &Vibration
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2013
ISRN Sensor Networks
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2013
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2013
Electrical and Computer Engineering
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2013
DistributedSensor Networks
International Journal of
ISRN Robotics
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2013
International Journal of
Antennas andPropagation
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2013
ISRN Electronics
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2013
Advances inOptoElectronics
Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2013
Hindawi Publishing Corporation http://www.hindawi.com Volume 2013Hindawi Publishing Corporation http://www.hindawi.com Volume 2013
The Scientific World Journal
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2013
Active and Passive Electronic Components
Chemical EngineeringInternational Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2013
ISRN Civil Engineering
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2013
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2013
Journal of
Sensors