![Paper Class XI[Nurture(X-XI)]](https://static.fdocuments.in/doc/165x107/55cf93c3550346f57b9e4fc8/paper-class-xinurturex-xi.jpg)
j. Physics XI Text Matter Modified
423
Physics XI EEE Consortium 1
-
Upload
banshi-rajpurohit-chandesara -
Category
Documents
-
view
227 -
download
0
Transcript of j. Physics XI Text Matter Modified

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 1/422
Physics XI
EEE Consortium
1

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 2/422
Physics XI
EEE Consortium
2

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 3/422
Physics XI
EEE Consortium
3

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 4/422
Physics XI
EEE Consortium
4

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 5/422
Physics XI
EEE Consortium
5

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 6/422
Physics XI
EEE Consortium
What is Physics?
Physics is often described as the study ofmatterandenergy. It is concerned with
how matter and energy relate to each other, and how they affect each other over
time and through space.
Physicists ask the fundamental questions how did the universe begin? How and
of what is it made? How does it change? What rules govern its behaviour?
Physicists may be roughly divided into two camps:experimentalphysicists
andtheoreticalphysicists. Experimental physicists design and run careful
investigations on a broad range of phenomena in nature, often under conditions
which are atypical of our everyday lives. They may, for example, investigate what
happens to the electrical properties of materials at temperatures very nearabsolute zero (460 degrees Fahrenheit) or measure the characteristics of energy
emitted by very hot gases. Theoretical physicists propose and develop models and
theories to explain mathematically the results of experimental
observations.Experimentandtheorytherefore have a broad overlap. Accordingly,
an experimental physicist remains keenly aware of the current theoretical work
in his or her field, while the theoretical physicist must know the experimenter's
results and the context in which the results need be interpreted.
It is also useful to distinguishclassicalphysics andmodernphysics.Classical
physicshas its origins approximately four hundred years ago in the studies
ofGalileoandNewtonon mechanics, and similarly, in the work
of Ampere,Faraday,MaxwellandOerstedone hundred fifty years ago in the
fields of electricity and magnetism. This physics handles objects which are6

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 7/422
Physics XI
EEE Consortium
neither too large nor too small, which move at relatively slow speeds (at least
compared to the speed of light: 186,000 miles per second!).
The emergence ofmodern physicsat the beginning of the twentieth century wasmarked by three achievements.
The first in1905 wasEinstein's brilliant model of light as a stream of particles
(photons). The second, which followed a few months later, was his revolutionary
theory of relativity which described objects moving at speeds close to the speed
of light. The third breakthrough came in 1910 withRutherford'sdiscovery of the
nucleus of the atom.Rutherford's work was followed byBohr's model of the
atom, which in turn stimulated the work ofde-
Broglie,Heisenberg,Schroedinger,Born,Pauli,Diracand others on the quantum
theory. The avalanche of exciting discoveries in modern physics continues today.
Given these distinctions within the field of physicsexperimentalandtheoretical
classicalandmodern,it is useful to further subdivide physics into various
disciplines, including astrophysics, atomic and molecular physics, biophysics,
solid state physics, optical and laser physics, fluid and plasma physics, nuclearphysics, and particle physics.
Following the discovery of a particle with properties consistent with theHiggs
boson atCERN in 2012 allfundamental articles predicted by the standard
model, and no others, appear to exist; however,physics beyond the Standard
Model, with theories such assupersymmetry, is an active area of research.
7

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 8/422
Physics XI
EEE Consortium
Scope and Excitement of Physics
We can get some idea of the scope of physics by looking at its various sub-disciplines. Basically, there are two domains of interest : macroscopic and
microscopic. The macroscopic domain includes phenomena at the laboratory,
terrestrial and astronomical scales. The microscopic domain includes atomic,
molecular and nuclear phenomena. Classical Physics deals mainly with
macroscopic phenomena and includes subjects like Mechanics, Electrodynamics,
Optics and Thermodynamics. Mechanics founded on Newton’s laws of motion and
the law of gravitation is concerned with the motion (or equilibrium) of particles,
rigid and deformable bodies, and general systems of particles. The propulsion ofa rocket by a jet of ejecting gases, propagation of water waves or sound waves in
air, the equilibrium of a bent rod under a load, etc., are problems of mechanics.
Electrodynamics deals with electric and magnetic phenomena associated with
charged and magnetic bodies. Its basic laws were given by Coulomb, Oersted,
Ampere and Faraday, and encapsulated by Maxwell in his famous set of
equations. The motion of a current-carrying conductor in a magnetic field, the
response of a circuit to an ac voltage (signal), the working of an antenna, the
propagation of radio waves in the ionosphere, etc., are problems ofelectrodynamics. Optics deals with the phenomena involving light. The working
of telescopes and microscopes, colours exhibited by thin films, etc., are topics in
optics. Thermodynamics, in contrast to mechanics, does not deal with the motion
of bodies as a whole.
Rather, it deals with systems in macroscopic equilibrium and is concerned with
changes in internal energy, temperature, entropy, etc., of the system through
external work and transfer of heat. The efficiency of heat engines andrefrigerators, the direction of a physical or chemical process, etc., are problems of
interest in thermodynamics. The microscopic domain of physics deals with the
constitution and structure of matter at the minute scales of atoms and nuclei
(and even lower scales of length) and their interaction with different probes such
8

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 9/422
Physics XI
EEE Consortium
as electrons, photons and other elementary particles. Classical physics is
inadequate to handle this domain and Quantum Theory is currently accepted as
the proper framework for explaining microscopic phenomena. Overall, the edifice
of physics is beautiful and imposing and you will appreciate it more as youpursue the subject. You can now see that the scope of physics is truly vast. It
covers a tremendous range of magnitude of physical quantities like length, mass,
time, energy, etc. At one end, it studies phenomena at the very small scale of
length (10-14 m or even less) involving electrons, protons, etc.; at the other end,
it deals with astronomical phenomena at the scale of galaxies or even the entire
universe whose extent is of the order of 1026 m. The two length scales differ by a
factor of 1040 or even more. The range of time scales can be obtained by dividing
the length scales by the speed of light : 10–22 s to 1018 s. The range of massesgoes from, say, 10–30 kg (mass of an electron) to 1055 kg (mass of known
observable universe). Terrestrial phenomena lie somewhere in the middle of this
range. Physics is exciting in many ways. To some people the excitement comes
from the elegance and universality of its basic theories, from the fact that a few
basic concepts and laws can explain phenomena covering a large range of
magnitude of physical quantities. To some others, the challenge in carrying out
imaginative new experiments to unlock the secrets of nature, to verify or refute
theories, is thrilling. Applied physics is equally demanding. Application andexploitation of physical laws to make useful devices is the most interesting and
exciting part and requires great ingenuity and persistence of effort. What lies
behind the phenomenal progress of physics in the last few centuries? Great
progress usually accompanies changes in our basic perceptions. First, it was
realised that for scientific progress, only qualitative thinking, though no doubt
important, is not enough. Quantitative measurement is central to the growth of
science, especially physics, because the laws of nature happen to be expressible
in precise mathematical equations. The second most important insight was thatthe basic laws of physics are universal — the same laws apply in widely different
contexts. Lastly, the strategy of approximation turned out to be very successful.
Most observed phenomena in daily life are rather complicated manifestations of
the basic laws. Scientists recognised the importance of extracting the essential
9

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 10/422
Physics XI
EEE Consortium
features of a phenomenon from its less significant aspects. It is not practical to
take into account all the complexities of a phenomenon in one go. A good
strategy is to focus first on the essential features, discover the basic principles
and then introduce corrections to build a more refined theory of thephenomenon. For example, a stone and a feather dropped from the same height
do not reach the ground at the same time. The reason is that the essential aspect
of the phenomenon, namely free fall under gravity, is complicated by the
presence of air resistance. To get the law of free fall under gravity, it is better to
create a situation wherein the air resistance is negligible. We can, for example, let
the stone and the feather fall through a long evacuated tube. In that case, the
two objects will fall almost at the same rate, giving the basic law that acceleration
due to gravity is independent of the mass of the object. With the basic law thusfound, we can go back to the feather, introduce corrections due to air resistance,
modify the existing theory and try to build a more realistic theory of objects
falling to the earth under gravity.
Physics, Technology and Society
Throughout the recent decades, we have been experiencing a dramatic change in
the world of technology.
I-Phones, Blackberries and laptops are becoming an important part of our daily
lives. We are all so dependent on these devices that sometimes we treatthem as
if it is part of our family.
Technology has become a priority for many people. It makes life easier to live on
and less time-consuming. Hence, people do not have to do all the hard labour
anymore.
Although technology has made life more convenient, there is certain amount of
drawbacks in which it has damaged the quality of our life. It separates
individuals from reality. The IPod is one example; by putting into ear buds and
immersing yourself in music while in public, you are disconnecting yourself from
the real world.10

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 11/422
Physics XI
EEE Consortium
The Internet detracts from the communication abilities of society, especially the
young. In formative teen years, lack of personal communication due to excessive
Internet usage can have an overall negative effect on mental and physical health.
Social networking inflicts damage on children and pushes them into leadingisolated, antisocial individuals, while living in a virtual world away from real life.
Overuse may ultimately lead to Internet addiction, which negatively affects a
child's scholastic performance, relationship with the family and psychological
health. Children can also access information that is unsuitable and
communicate with people they shouldn't come in contact with.
Protecting children should be a parent's primary concern and they must talk to
their kids about Internet safety and spend more time with them. In turn,
children should attend sporting sections, various educational courses, theatres
etc. Otherwise, they will degrade if spending almost all day near laptops and
other devices.
Technology hinders personal communication. Nowadays, people are starting to
become emotionally attached to technological devices. It is becoming very
difficult to spend a few hours, or even minutes without the usage of computers,
mobile phones etc.
Some experts believe that Internet users will lose the savvy, patience to conduct
social relations in the corporeal world. They stress a serious concern involving
proliferation of inappropriate content, such as violence, bias, hate speech,
profanity and pornography. The Internet gives people an easy way to find
unnecessary information.
These sorts of desperations changed people's social lives. Networking websitessuch as Facebook, Twitter etc. appear as ineffective way to communicate with
people, simply because conversations are very vague.
As a reminder, Twitter has 271 million monthly active users, 78 percent of
Twitter active users are on mobile. As of the first quarter 2014, social network
11

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 12/422
Physics XI
EEE Consortium
Facebook had 1.28 billion monthly active users and 654 million people use
Facebook on mobile on a daily basis. That being said, people cannot imagine
their lives without technology. It seems that human beings will become too
computerized one day.
Society must be able to utilize technology while not allowing it to impede social
interactions, particularly for those who are easily influenced.
Online communication is now in fashion, putting a thick wall between you and
reality. Modern technologies could replace live talking with texting to your
friends. What is the next to change our life?
The connection between physics, technology and society can be seen in manyexamples. The discipline of thermodynamics arose from the need to understand
and improve the working of heat engines. The steam engine, as we know, is
inseparable from the Industrial Revolution in England in the eighteenth century,
which had great impact on the course of human civilisation. Sometimes
technology gives rise to new physics; at other times physics generates new
technology. An example of the latter is the wireless communication technology
that followed the discovery of the basic laws of electricity and magnetism in the
nineteenth century. The applications of physics are not always easy to foresee. Aslate as 1933, the great physicist Ernest Rutherford had dismissed the possibility
of tapping energy from atoms. But only a few years later, in 1938, Hahn and
Meitner discovered the phenomenon of neutron-induced fission of uranium,
which would serve as the basis of nuclear power reactors and nuclear weapons.
Yet another important example of physics giving rise to technology is the silicon
‘chip’ that triggered the computer revolution in the last three decades of the
twentieth century A most significant area to which physics has and will
contribute is the development of alternative energy resources. The fossil fuels ofthe planet are dwindling fast and there is an urgent need to discover new and
affordable sources of energy. Considerable progress has already been made in
this direction (for example, in conversion of solar energy, geothermal energy, etc.,
into electricity), but much more is still to be accomplished. Table1.1 lists some of
12

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 13/422
Physics XI
EEE Consortium
the great physicists, their major contribution and the country of origin. You will
appreciate from this table the multi-cultural, international character of the
scientific endeavour. Table 1.2 lists some important technologies and the
principles of physics they are based on. Obviously, these tables are notexhaustive. We urge you to try to add many names and items to these tables with
the help of your teachers, good books and websites on science. You will find that
this exercise is very educative and also great fun. And, assuredly, it will never
end. The progress of science is unstoppable! Physics is the study of nature and
natural phenomena. Physicists try to discover the rules that are operating in
nature, on the basis of observations, experimentation and analysis. Physics deals
with certain basic rules/laws governing the natural world. What is the nature of
physical laws? We shall now discuss the nature of fundamental forces and thelaws that govern the diverse phenomena of the physical world.
Fundamental Forces in Nature
We all have an intuitive notion of force. In our experience, force is needed to
push, carry or throw objects, deform or break them. We also experience the
impact of forces on us, like when a moving object hits us or we are in a merry-go-round. Going from this intuitive notion to the proper scientific concept of force is
not a trivial matter. Early thinkers like Aristotle had wrong ideas about it. The
correct notion of force was arrived at by Isaac Newton in his famous laws of
motion. He also gave an explicit form for the force for gravitational attraction
between two bodies. We shall learn these matters in subsequent chapters. In the
macroscopic world, besides the gravitational force, we encounter several kinds of
forces: muscular force, contact forces between bodies, friction (which is also a
contact force parallel to the surfaces in contact), the forces exerted bycompressed or elongated springs and taut strings and ropes (tension), the force
of buoyancy and viscous force when solids are in contact with fluids, the force
due to pressure of a fluid, the force due to surface tension of a liquid, and so on.
There are also forces involving charged and magnetic bodies. In the microscopic
13

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 14/422
Physics XI
EEE Consortium
domain again, we have electric and magnetic forces, nuclear forces involving
protons and neutrons, inter-atomic and intermolecular forces, etc. We shall get
familiar with some of these forces in later parts of this course. A great insight of
the twentieth century physics is that these different forces occurring in differentcontexts actually arise from only a small number of fundamental forces in
nature. For example, the elastic spring force arises due to the net
attraction/repulsion between the neighbouring atoms of the spring when the
spring is elongated/compressed. This net attraction/repulsion can be traced to
the (unbalanced) sum of electric forces between the charged constituents of the
atoms. In principle, this means that the laws for ‘derived’ forces (such as spring
force, friction) are not independent of the laws of fundamental forces in nature.
The origin of these derived forces is, however, very complex. At the present stageof our understanding, we know of four fundamental forces in nature, which are
described in brief here :
Gravitational Force
The gravitational force is the force of mutual attraction between any two objects
by virtue of their masses. It is a universal force. Every object experiences thisforce due to every other object in the universe. All objects on the earth, for
example, experience the force of gravity due to the earth. In particular, gravity
governs the motion of the moon and artificial satellites around the earth, motion
of the earth and planets around the sun, and, of course, the motion of bodies
falling to the earth. It plays a key role in the large-scale phenomena of the
universe, such as formation and evolution of stars, galaxies and galactic clusters.
Electromagnetic Force
Electromagnetic force is the force between charged particles. In the simpler case
when charges are at rest, the force is given by Coulomb’s law : attractive for
unlike charges and repulsive for like charges. Charges in motion produce14

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 15/422
Physics XI
EEE Consortium
magnetic effects and a magnetic field gives rise to a force on a moving charge.
Electric and magnetic effects are, in general, inseparable – hence the name
electromagnetic force. Like the gravitational force, electromagnetic force acts over
large distances and does not need any intervening medium. It is enormouslystrong compared to gravity. The electric force between two protons, for example,
is 1036 times the gravitational force between them, for any fixed distance. Matter,
as we know, consists of elementary charged constituents like electrons and
protons. Since the electromagnetic force is so much stronger than the
gravitational force, it dominates all phenomena at atomic and molecular scales.
(The other two forces, as we shall see, operate only at nuclear scales.) Thus it is
mainly the electromagnetic force that governs the structure of atoms and
molecules, the dynamics of chemical reactions and the mechanical, thermal andother properties of materials. It underlies the macroscopic forces like ‘tension’,
‘friction’, ‘normal force’, ‘spring force’, etc. Gravity is always attractive, while
electromagnetic force can be attractive or repulsive. Another way of putting it is
that mass comes only in one variety (there is no negative mass), but charge
comes in two varieties: positive and negative charge. This is what makes all the
difference. Matter is mostly electrically neutral (net charge is zero). Thus, electric
force is largely zero and gravitational force dominates terrestrial phenomena.
Electric force manifests itself in atmosphere where the atoms are ionised andthat leads to lightning If we reflect a little, the enormous strength of the
electromagnetic force compared to gravity is evident in our daily life. When we
hold a book in our hand, we are balancing the gravitational force on the book
due to the huge mass of the earth by the ‘normal force’ provided by our hand.
The latter is nothing but the net electromagnetic force between the charged
constituents of our hand and the book, at the surface in contact. If
electromagnetic force were not intrinsically so much stronger than gravity, the
hand of the strongest man would crumble under the weight of a feather ! Indeedto be consistent, in that circumstance, we ourselves would crumble under our
own weight !
Strong Nuclear Force15

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 16/422
Physics XI
EEE Consortium
The strong nuclear force binds protons and neutrons in a nucleus. It is evident
that without some attractive force, a nucleus will be unstable due to the electric
repulsion between its protons. This attractive force cannot be gravitational since
force of gravity is negligible compared to the electric force. A new basic forcemust, therefore, be invoked. The strong nuclear force is the strongest of all
fundamental forces, about 100 times the electromagnetic force in strength. It is
charge-independent and acts equally between a proton and a proton, a neutron
and a neutron, and a proton and a neutron. Its range is, however, extremely
small, of about nuclear dimensions (10–15m). It is responsible for the stability of
nuclei. The electron, it must be noted, does not experience this force. Recent
developments have, however, indicated that protons and neutrons are built out of
still more elementary constituents called quarks.
Weak Nuclear Force
The weak nuclear force appears only in certain nuclear processes such as the β-
decay of a nucleus. In β-decay, the nucleus emits an electron and an uncharged
particle called neutrino. The weak nuclear force is not as weak as the
gravitational force, but much weaker than the strong nuclear andelectromagnetic forces. The range of weak nuclear force is exceedingly small, of
the order of 10-16 m.
Towards Unification of Forces
We remarked in section 1.1 that unification is a basic quest in physics. Great
advances in physics often amount to unification of different theories and
domains. Newton unified terrestrial and celestial domains under a common law
of gravitation. The experimental discoveries of Oersted and Faraday showed that
electric and magnetic phenomena are in general inseparable. Maxwell unified
electromagnetism and optics with the discovery that light is an electromagnetic
wave. Einstein attempted to unify gravity and electromagnetism but could not16

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 17/422
Physics XI
EEE Consortium
succeed in this venture. But this did not deter physicists from zealously pursuing
the goal of unification of forces. Recent decades have seen much progress on this
front. The electromagnetic and the weak nuclear force have now been unified and
are seen as aspects of a single ‘electro-weak’ force. What this unification actuallymeans cannot be explained here. Attempts have been (and are being) made to
unify the electro-weak and the strong force and even to unify the gravitational
force with the rest of the fundamental forces. Many of these ideas are still
speculative and inconclusive. Table 1.4 summarises some of the milestones in
the progress towards unification of forces in nature.
1.5 Nature Of Physical Laws Physicists explore the universe. Theirinvestigations, based on scientific processes, range from particles that are
smaller than atoms in size to stars that are very far away. In addition to finding
the facts by observation and experimentation, physicists attempt to discover the
laws that summarise (often as mathematical equations) these facts. In any
physical phenomenon governed by different forces, several quantities may change
with time. A remarkable fact is that some special physical quantities, however,
remain constant in time. They are the conserved quantities of nature.
Understanding these conservation principles is very important to describe theobserved phenomena quantitatively. For motion under an external conservative
force, the total mechanical energy i.e. the sum of kinetic and potential energy of a
body is a constant. The familiar example is the free fall of an object under gravity.
Both the kinetic energy of the object and its potential energy change
continuously with time, but the sum remains fixed. If the object is released from
rest, the initial potential energy is completely converted into the kinetic energy of
the object just before it hits the ground. This law restricted for a conservative
force should not be confused with the general law of conservation of energy of anisolated system (which is the basis of the First Law of Thermodynamics). The
concept of energy is central to physics and the expressions for energy can be
written for every physical system. When all forms of energy e.g., heat, mechanical
energy, electrical energy etc., are counted, it turns out that energy is conserved.
17

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 18/422
Physics XI
EEE Consortium
The general law of conservation of energy is true for all forces and for any kind of
transformation between different forms of energy. In the falling object example, if
you include the effect of air resistance during the fall and see the situation after
the object hits the ground and stays there, the total mechanical energy isobviously not conserved. The general law of energy conservation, however, is still
applicable. The initial potential energy of the stone gets transformed into other
forms of energy: heat and sound. (Ultimately, sound after it is absorbed becomes
heat.) The total energy of the system (stone plus the surroundings) remains
unchanged. The law of conservation of energy is thought to be valid across all
domains of nature, from the microscopic to the macroscopic. It is routinely
applied in the analysis of atomic, nuclear and elementary particle processes. At
the other end, all kinds of violent phenomena occur in the universe all the time. Yet the total energy of the universe (the most ideal isolated system possible !) is
believed to remain unchanged. Until the advent of Einstein’s theory of relativity,
the law of conservation of mass was regarded as another basic conservation law
of nature, since matter was thought to be indestructible. It was (and still is) an
important principle used, for example, in the analysis of chemical reactions. A
chemical reaction is basically a rearrangement of atoms among different
molecules. If the total binding energy of the reacting molecules is less than the
total binding energy of the product molecules, the difference appears as heat andthe reaction is exothermic. The opposite is true for energy absorbing
(endothermic) reactions. However, since the atoms are merely rearranged but not
destroyed, the total mass of the reactants is the same as the total mass of the
products in a chemical reaction. The changes in the binding energy are too small
to be measured as changes in mass. According to Einstein’s theory, mass m is
equivalent to energy E given by the relation E= mc2, where c is speed of light in
vacuum. In a nuclear process mass gets converted to energy (or vice-versa). This
is the energy which is released in a nuclear power generation and nuclearexplosions.
Energy is a scalar quantity. But all conserved quantities are not necessarily
scalars. The total linear momentum and the total angular momentum (both
vectors) of an isolated system are also conserved quantities. These laws can be18

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 19/422
Physics XI
EEE Consortium
derived from Newton’s laws of motion in mechanics. But their validity goes
beyond mechanics. They are the basic conservation laws of nature in all
domains, even in those where Newton’s laws may not be valid. Besides their great
simplicity and generality, the conservation laws of nature are very useful inpractice too. It often happens that we cannot solve the full dynamics of a complex
problem involving different particles and forces. The conservation laws can still
provide useful results. For example, we may not know the complicated forces that
act during a collision of two automobiles; yet momentum conservation law
enables us to bypass the complications and predict or rule out possible outcomes
of the collision. In nuclear and elementary particle phenomena also, the
conservation laws are important tools of analysis. Indeed, using the conservation
laws of energy and momentum for β-decay, Wolfgang Pauli (1900-1958) correctlypredicted in1931 the existence of a new particle (now called neutrino) emitted in
β-decay along with the electron. Conservation laws have a deep connection with
symmetries of nature that you will explore in more advanced courses in physics.
For example, an important observation is that the laws of nature do not change
with time! If you perform an experiment in your laboratory today and repeat the
same experiment (on the same objects under identical conditions) after a year,
the results are bound to be the same. It turns out that this symmetry of nature
with respect to translation (i.e. displacement) in time is equivalent to the law ofconservation of energy. Likewise, space is homogeneous and there is no
(intrinsically) preferred location in the universe. To put it more clearly, the laws of
nature are the same everywhere in the universe. (Caution: the phenomena may
differ from place to place because of differing conditions at different locations.
For example, the acceleration due to gravity at the moon is one-sixth that at the
earth, but the law of gravitation is the same both on the moon and the earth.)
This symmetry of the laws of nature with respect to translation in space gives
rise to conservation of linear momentum. In the same way isotropy of space (nointrinsically preferred direction in space) underlies the law of conservation of
angular momentum*. The conservation laws of charge and other attributes of
elementary particles can also be related to certain abstract symmetries.
19

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 20/422
Physics XI
EEE Consortium
Symmetries of space and time and other abstract symmetries play a central role
in modern theories of fundamental forces in nature.
Exercise
1.1 Some of the most profound statements on the nature of science have comefrom Albert Einstein, one of the greatest scientists of all time. What do you think
did Einstein mean when he said : “The most incomprehensible thing about the
world is that it is comprehensible”?
1.2 “Every great physical theory starts as a heresy and ends as a dogma”. Give
some examples from the history of science of the validity of this incisive remark.
1.3 “Politics is the art of the possible”. Similarly, “Science is the art of the
soluble”. Explain this beautiful aphorism on the nature and practice of science.1.4 Though India now has a large base in science and technology, which is fast
expanding, it is still a long way from realising its potential of becoming a world
leader in science. Name some important factors, which in your view have
hindered the advancement of science in India.
20

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 21/422
Physics XI
EEE Consortium
1.5 No physicist has ever “seen” an electron. Yet, all physicists believe in the
existence of electrons. An intelligent but superstitious man advances this analogy
to argue that ‘ghosts’ exist even though no one has ‘seen’ one. How will you refute
his argument?
1.6 The shells of crabs found around a particular coastal location in Japan seem
mostly to resemble the legendary face of a Samurai. Given below are two
explanations of this observed fact. Which of these strikes you as a scientific
explanation?
(a) A tragic sea accident several centuries ago drowned a young Samurai. As a
tribute to his bravery, nature through its inscrutable ways immortalised his face
by imprinting it on the crab shells in that area.
(b) After the sea tragedy, fishermen in that area, in a gesture of honour to their
dead hero, let free any crab shell caught by them which accidentally had a shape
resembling the face of a Samurai. Consequently, the particular shape of the crab
shell survived longer and therefore in course of time the shape was genetically
propagated. This is an example of evolution by artificial selection.
[Note: This interesting illustration taken from Carl Sagan’s ‘The Cosmos’
highlights the fact that often strange and inexplicable facts which on the firstsight appear ‘supernatural’ actually turn out to have simple scientific
explanations. Try to think out other examples of this kind].
1.7 The industrial revolution in England and Western Europe more than two
centuries ago was triggered by some key scientific and technological advances.
What were these advances ?
1.8 It is often said that the world is witnessing now a second industrial
revolution, which will transform the society as radically as did the first. List somekey contemporary areas of science and technology, which are responsible for this
revolution.
1.9 Write in about 1000 words a fiction piece based on your speculation on the
science and technology of the twenty-second century.21

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 22/422
Physics XI
EEE Consortium
1.10 Attempt to formulate your ‘moral’ views on the practice of science. Imagine
yourself stumbling upon a discovery, which has great academic interest but is
certain to have nothing but dangerous consequences for the human society. How,
if at all, will you resolve your dilemma ?
22

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 23/422
Physics XI
EEE Consortium
23

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 24/422
Physics XI
EEE Consortium
24

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 25/422
Physics XI
EEE Consortium
25

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 26/422
Physics XI
EEE Consortium
26

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 27/422
Physics XI
EEE Consortium
27

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 28/422
Physics XI
EEE Consortium
2.1 Introduction
PHYSICS is the science of objective observation, an observation which is the
same for all individuals. An individual observes through his sense of touch or
sight, but these senses are not always reliable. To illustrate the inaccuracy of our
sense of touch, we consider three pans containing cold, warm and hot water. If
you put your finger in cold water and then in warm water, your sense of touch will tell you that it is hot. But if you put your finger first in hot water and then in
warm water, your sense tells you it is cold. This clearly suggests the necessity of
making a measurement to arrive at the truth. It is necessary to measure the
degree of hotness of water in each pan. In other words, it is not enough to
28

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 29/422
Physics XI
EEE Consortium
describe a phenomenon in a general and qualitative way. A number must be tied
to it. Thus, physics is a science of measurement. Lord Kelvin, a leading physicist
of the 19th century, once said:
“When you measure what you are talking about and express it in numbers, you
know something about it: but when you cannot, your knowledge is of a meagre and
unsatisfactory kind ; it may be the beginning of knowledge, but you have scarcely
in your thoughts advanced to the stage of science.”
2.2 Fundamental and Derived quantities
Physical quantities can be classified into two namely, fundamental quantities and
derived quantities.Fundamental quantities are quantities which cannot beexpressed in terms of any other physical quantity. For example quantities like
length, mass, time, temperature are fundamental quantities.Quantities that can
be expressed in terms of fundamental quantities are called derived quantities.
Area, volume, density etc. are examples of derived quantities.
2.3 Unit and Various Systems
To measure a quantity, we always compare it with some reference standard. To
say that a rope is 10 metres long is to say that it is 10 times as long as an object
whose length is defined as 1 metre. Such a standard is called a unit of the
quantity.
Therefore,unit of a physical quantity is defined as the established standard used
for comparison of the given physical quantity.
The units in which the fundamental quantities are measured are called
fundamental units and the units used to measure derived quantities are called
derived units.
2.3.1 System International de Units (SI system of units)
In earlier days, many systems of units were followed to measure physical
quantities. The British system of foot-pound-second or FPS system, the Gaussian
29

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 30/422
Physics XI
EEE Consortium
system of centimetre - gram - second or CGS system, the metre - kilogram -
second or MKS system were the three systems commonly followed. To bring
uniformity, the General Conference on Weights and Measures in the year 1960,
accepted the SI system of units. This system is essentially a modification overMKS system and is, therefore rationalised MKSA (metre kilogram second ampere)
system.
This rationalisation was essential to obtain the units of all the physical
quantities in physics.
In the SI system of units there are seven fundamental quantities and two
supplementary quantities. They are presented in Table 1.1.
Table 2.1SI System of units
Fundamental quantities:
Physical quantity UnitSymbo
l
Length metre M
Masskilogra
mKg
Time second SElectric current ampere A
Temperature kelvin K
Luminous intensity candela cd
Amount of
substancemole mol
Supplementary quantities:
Physical quantity Unit Symbol
Plane angle radian rad
Solid angle steradian sr
30

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 31/422
Physics XI
EEE Consortium
2.3.2 Uniqueness of SI system
The SI system is logically far superior to all other systems. The SI units have
certain special features which make them more convenient in practice.Permanence and reproducibility are the two important characteristics of any unit
standard. The SI standards do not vary with time as they are based on the
properties of atoms. FurtherSI system of units are coherent system of units, in
which the units of derived quantities are obtained as multiples or submultiples of
certain basic units. Table 1.2 lists some of the derived quantities and their units.
Table 2.2
Physical
quantity
Expression Unit
Area
Volume
Velocity
Acceleration
Angular
velocity
Angular
acceleration
Density
Momentum
Moment ofintertia
Force
Pressure
length × breadth
area x height
displacement/
time
velocity / time
angulardisplacement /
time
angular velocity /
time
mass / volume
mass × velocitymass x
(distance )2
m2
m3
m/s
m/s2
rad/s
rad/s2
kg/m3
kgm/
skgm2
N
N/m2
31

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 32/422
Physics XI
EEE Consortium
mass x
acceleration
force/area
2.3.3 SI standards
Length
Length is defined as the distance between two points. The SI unit of length is
metre.
One standard metre is equal to 1650 763.73 wavelengths of the orange- red light
emitted by the individual atoms of krypton- 86 in a krypton discharge lamp.
32

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 33/422
Physics XI
EEE Consortium
Mass
Mass is the quantity of matter contained in a body. It is independent of
temperature and pressure. It does not vary from place to place. The SI unit of
mass is kilogram.
The kilogram is equal to the mass of the international prototype of the kilogram (a
platinum- iridium alloy cylinder) kept at the International Bureau of Weights and
Measures at Sevres, near Paris, France.
An atomic standard of mass has not yet been adopted because it is not yet
possible to measure masses on an atomic scale with as much precision as on amacroscopic scale.
Time
33

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 34/422
Physics XI
EEE Consortium
Until 1960 the standard of time was based on the mean solar day, the time
interval between successive passages of the sun at its highest point across the
meridian. It is averaged over a year. In 1967, an atomic standard was adopted
for second, the SI unit of time.
One standard second is defined as the time taken for 9192631770 periods of the
radiation corresponding to unperturbed transition between hyperfine levels of the
ground state of caesium –133 atom.
Atomic clocks are based on this. In atomic clocks, an error of one second occurs
only in 5000 years.
Ampere
The ampere is the constant current which, flowing through two straight parallel
infinitely long conductors of negligible cross-section, and placed in vacuum 1 m
apart, would produce between the conductors a force of 2 × 10-7newton per unit
length of the conductors.
Kelvin34

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 35/422
Physics XI
EEE Consortium
The Kelvin is the fraction of 1/273.6 of the thermodynamic temperature of the triple
point of water*
* Triple point of water is the temperature at which saturated water vapour, pure
water and melting ice are all in equilibrium. The triple point temperature of water is
273.16 K.
Candela
The candela is the luminous intensity in a given direction due to a source, which
emits monochromatic radiation of frequency 540 × 1012 Hz and of which the
radiant intensity in that direction is 1/683 watt per steradian.
Mole
The mole is the amount of substance which contains as many elementary entities
as there are atoms in 0.012 kg of carbon -12.
2.3.4 Rules and conventions for writing SI units and their symbols
1. The units named after scientists are not written with a capital initial letter.
For example : newton, henry, watt
2. The symbols of the units named after scientist should be written by a capital
letter.
For example: N for newton, H for henry, W for watt
3. Small letters are used as symbols for units not derived from a proper name.
For example: m for metre, kg for kilogram
35

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 36/422
Physics XI
EEE Consortium
4. No full stop or other punctuation marks should be used within or at the end of
symbols.
For example: 50 m and not as 50 m.
5. The symbols of the units do not take plural form.
For example: 10 kg not as 10 kgs
6. When temperature is expressed in kelvin, the degree sign is omitted.
For example: 273 K not as 273o
(If expressed in Celsius scale, degree sign is to be included. For example 100oC
and not 100 C)
7. Use of solidus is recommended only for indicating a division of one letter unit
symbol by another unit symbol. Not more than one solidus is used.
For example: m s-1 or m/s, J/K mol or JK-1mol-1 but not J/K/mol.
8. Some space is always to be left between the number and the symbol of the
unit and also between the symbols for compound units such as force,
momentum, etc.
For example, it is not correct to write 2.3m. The correct representation is 2.3 m;kg m s-2and not as kgms-2
9. Only accepted symbols should be used.
For example : ampere is represented as A and not as ‘amp’ or ‘am’ ; second is
represented as ‘s’ and not as ‘sec’.
10. Numerical value of any physical quantity should be expressed in scientific
notation.
For an example, density of mercury is
1.36 × 104
kg m-3
and not as 13600 kg m-3
2.3.5 Expressing larger and smaller physical quantities
Once the fundamental units are defined, it is easier to express larger and smaller
units of the same physical quantity. In the metric (SI) system these are related to
36

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 37/422
Physics XI
EEE Consortium
the fundamental unit in multiples of 10 or 1/10. Thus 1 km is 1000 m and 1
mm is 1/1000 metre. Table 1.3 lists the standard SI prefixes, their meanings and
abbreviations. In order to measure very
large distances, the following units are used.
(i) Light year
Light year is the distance travelled by light in one year in vacuum.
Distance travelled = velocity of light × 1 year
1 light year = 3×108 ms-1×1 year(inseconds) = 3 × 108 × 365.25 × 24 × 60 × 60
= 9.467 × 10
15
m
1 light year = 9.467 × 1015 m
Table 2.3Prefixes for power of ten
Power of
10
Prefix Abbreviatio
n10-15
10-12
10-9
10-6
10-3
10-2
10-1
101
102
103
106
femto
pico
nano
micro
milli
centi
deci
deca
hecto
kilo
mega
f
p
n
µ
m
c
c
da
h
k
M
37

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 38/422
Physics XI
EEE Consortium
109
1012
1015
giga
tera
peta
G
T
P
(ii) Astronomical unit
Astronomical unit is the mean distance of the centre of the Sun from the centre
of the Earth.
1 Astronomical unit (AU) = 1.496 × 1011m
2.4 Measurement
Physics can also be defined as the branch of science dealing with the study of
properties of materials. To understand the properties of materials, measurement
of physical quantities such as length, mass, time etc., are involved. Theuniqueness of physics lies in the measurement of these physical quantities.
2.4.1 Determination of distance
For measuring large distances such as the distance of moon or a planet from the
Earth, special methods are adopted. Radio-echo method, laser pulse method and
parallax method are used to determine very large distances.
Laser pulse method
The distance of moon from the Earth can be determined using laser pulses. The
laser pulses are beamed towards the moon from a powerful transmitter. These
pulses are reflected back from the surface of the moon. The time interval between
sending and receiving of the signal is determined very accurately.
38

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 39/422
Physics XI
EEE Consortium
Ift is the time interval andc the velocity of the laser pulses, then the distance of
the moon from the Earth isd =ct/2
2.4 Determination of mass
The conventional method of finding the mass of a body in the laboratory is by
physical balance. The mass can be determined to an accuracy of 1 mg. Now-a-
days, digital balances are used to find the mass very accurately. The advantage of
digital balance is that the mass of the object is determined at once.
2.5 Measurement of time
We need a clock to measure any time interval. Atomic clocks provide better
standard for time. Some techniques to measure time interval are given below.
Quartz clocks
The piezo-electric property* of a crystal is the principle of quartz clock. These
clocks have an accuracy of one second in every 10 seconds.
39

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 40/422
Physics XI
EEE Consortium
*When pressure is applied along a particular axis of a crystal, an electric potential
difference is developed in a perpendicular axis.
Atomic clocks
These clocks make use of periodic vibration taking place within the atom. Atomic
clocks have an accuracy of 1 part in 10
2.6 Accuracy and precision of measuring instruments
All measurements are made with the help of instruments. The accuracy to which
a measurement is made depends on several factors.
For example, if length is measured using a metre scale which has graduations at
1 mm interval then all readings are good only up to this value.The error in the
use of any instrument is normally taken to be half of the smallest division on the
scale of the instrument. Such an error is called instrumental error. In the case of ametre scale, this error is about 0.5 mm.
Physical quantities obtained from experimental observation always have some
uncertainty. Measurements can never be made with absolute precision. Precision
of a number is often indicated by following it with± symbol and a second number
indicating the maximum error likely.
40

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 41/422
Physics XI
EEE Consortium
For example, if the length of a steel rod = 56.47±3 mm then the true length is
unlikely to be less than 56.44 mm or greater than 56.50 mm.If the error in the
measured value is expressed in fraction, it is called fractional error and if
expressed in percentage it is called percentage error. For example, a resistorlabelled “470 Ω, 10%” probably has a true resistance differing not more than
10% from 470 Ω. So the true value lies between 423 Ω and 517 Ω.
2.6.1 Significant figures
The digits which tell us the number of units we are reasonably sure of having
counted in making a measurement are called significant figures. Or in other
words,the number of meaningful digits in a number is called the number ofsignificant figures. A choice of change of different units does not change the
number of significant digits or figures in a measurement.
For example, 2.868 cm has four significant figures. But in different units, the
same can be written as 0.02868 m or 28.68 mm or 28680 µm. All these numbers
have the same four significant figures.
From the above example, we have the following rules.
i) All the non-zero digits in a number are significant.
ii) All the zeroes between two non-zeroes digits are significant, irrespective of thedecimal point.
iii) If the number is less than 1, the zeroes on the right of decimal point but to
the left of the first non-zero digit are not significant. (In 0.02868 the underlined
zeroes are not significant).
iv) The zeroes at the end without a decimal point are not significant. (In 23080
µm, the trailing zero is not significant).
v) The trailing zeroes in a number with a decimal point are significant. (The
number 0.07100 has four significant digits).
Examples
i) 30700 has three significant figures.
ii) 132.73 has five significant figures.
41

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 42/422
Physics XI
EEE Consortium
iii) 0.00345 has three and
iv) 40.00 has four significant figures.
2.6.2 Rounding off
Calculators are widely used now-a-days to do the calculations. The result given
by a calculator has too many figures. In no case the result should have more
significant figures than the figures involved in the data used for calculation. The
result of calculation with number containing more than one uncertain digit,
should be rounded off. The technique of rounding off is followed in applied areas
of science.
A number 1.876 rounded off to three significant digits is 1.88while the number1.872 would be 1.87. The rule is that if the insignificant digit (underlined) is
more than 5, the preceding digit is raised by 1, and is left unchanged if the
former is less than 5.
If the number is 2.845, the insignificant digit is 5. In this case, the convention is
that if the preceding digit is even, the insignificant digit is simply dropped and, if
it is odd, the preceding digit is raised by 1. Following this, 2.845 is rounded off to
2.84 where as 2.815 is rounded off to 2.82.
Examples
1. Add 17.35 kg, 25.8 kg and 9.423 kg. Of the three measurements given, 25.8
kg is the least accurately known.
∴ 17.35 + 25.8 + 9.423 = 52.573 kg
Correct to three significant figures, 52.573 kg is written as 52.6 kg
2. Multiply 3.8 and 0.125 with due regard to significant figures.
3.8 × 0.125 = 0.475
The least number of significant figure in the given quantities is 2.
Therefore the result should have only two significant figures.
∴ 3.8 × 0.125 = 0.475 = 0.48
42

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 43/422
Physics XI
EEE Consortium
2.6.3 Errors in Measurement
The uncertainty in the measurement of a physical quantity is called error. It is
the difference between the true value and the measured value of the physical
quantity. Errors may be classified into many categories.(i) Constant errors
It is the same error repeated every time in a series of observations. Constant
error is due to faulty calibration of the scale in the measuring instrument. In
order to minimise constant error, measurements are made by different possible
methods and the mean value so obtained is regarded as the true value.
(ii) Systematic errors
These are errors which occur due to a certain pattern or system. These errorscan be minimised by identifying the source of error.
Instrumental errors, personal errors due to individual traits and errors due to
external sources are some of the systematic errors.
(iii) Gross errors
Gross errors arise due to one or more than one of the following reasons.
(1) Improper setting of the instrument.
(2) Wrong recordings of the observation.
(3) Not taking into account sources of error and precautions.
(4) Usage of wrong values in the calculation.
Gross errors can be minimised only if the observer is very careful in his
observations and sincere in his approach.
(iv) Random errors
It is very common that repeated measurements of a quantity givevalues whichare slightly different from each other.These errors have no set pattern and occur
in a random manner. Hence they are called random errors. They can be
minimised by repeating the measurements many times and taking the arithmetic
mean of all the values as the correct reading. The most common way of
43

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 44/422
Physics XI
EEE Consortium
expressing an error is percentage error. If the accuracy in measuring a quantity
x is∆x, then the percentage error inx is given by -
(x/x)∆ × 100 %
1.6.4 Different types of errors:
(i) Absolute error : Absolute error in the measurement of a physical quantity is
the magnitude of the difference between the true value and the measured value
of the quantity.
Let a physical quantity be measured n times. Let the measured values be a1, a2,
….,an.
The arithmetic mean of these values is
am=a1+a2+…+an
n
Usually, am is taken as the true value of the quantity, if the same is unknown
otherwise.
By definition, absolute errors in the measured values of the quantity are
∆a1 = am – a1,∆a2 = am – a2………
∆an = am – an The absolute errors may be positive in certain cases and negative in certain other
cases.
(ii)Mean absolute error :It is the arithmetic mean of the magnitudes of absolute
errors in all the measurements of the quantity. It is represented by a∆ . Thus
∆a1 +∆a2 + …….. +∆ana∆ = ----------------------------
nHence the final result of measurement may be written as ( a = am ± a∆ ).
This implies that any measurement of the quantity is likely to lie between (a = am+ a∆ ) and (a = am - a∆ ).
44

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 45/422
Physics XI
EEE Consortium
(iii) Relative error or Fractional error : The relative error or fractional error of
measurement is defined as the ratio of mean absolute error to the mean value of
the quantity measured.
Thus Relative error or Fractional error is given by Mean absolute error a∆
= -------------------------- = ----
Mean value am
(iv)Percentage error : When the relative/fractional error is expressed in
percentage, we call it percentage error. Thus
a∆
Percentage error = ------ x 100 %am
1.6.4.1 Propagation of Errors :.
(1)Error in sum of the quantities :
Suppose x = a + b and
a = absolute error in measurement of a∆
b = absolute error in measurement of b∆
x = absolute error in calculation of x, i.e. sum of a and b.∆
The maximum absolute error in x is
x = ± (a +b)∆ ∆ ∆
Percentage error in the value of x is
(a + b)∆ ∆
= --------------- x 100 %
a + b
Example 1
Two resistances R1 = (100 ± 3) ohm and R2 = (200 ± 4) ohm are connected in
series. Find the equivalent resistance.
Solution : Here,
45

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 46/422
Physics XI
EEE Consortium
R1 = (100 ± 3) ohm and
R2 = (200 ± 4) ohm
When resistances are connected in series,
R = R1 + R2= (300 ± 7) ohm.
(2) Error in difference of the quantities : Supposex = a – b and
a=absolute error in measurement of a,∆
b=absolute error in measurement of b,∆
x = absolute error in calculation of x, i.e. difference of ‘a’ and ‘b’.∆
The maximum absolute error in x is
x = ± (a + b)∆ ∆ ∆
Percentage error in the value of x is(a + b)∆ ∆
= --------------- x 100 %
a – b
Example 2
The external and internal diameters of a hollow cylinder are determined with a
Vernier Callipers. The results recorded as 4.23 ± 0.01 cm and 3.89 ± 0.01 cm.
Determine the thickness of the cylinder wall with error limits.
Solution :Here d1= 4.23 ± 0.01 cm andd2= 3.89 ± 0.01 cm
Now, the thickness of the cylinder wall
= d1 – d2= (4.23 ± 0.01) – (3.89 ± 0.01)
= (0.34 ± 0.02) cm.
(3) Error in product of quantities:Supposex = a × b and
a=absolute error in measurement of a,∆
b=absolute error in measurement of b∆
x =absolute error in calculation of x i.e. product of ‘a’ and ‘b’.∆
Then, the maximum fractional error in x is
46

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 47/422
Physics XI
EEE Consortium
x∆ a b∆ ∆
---- = ± ----- + -----
x a b
Example 3
A potential difference, V = (100 ± 2) volt, when applied across a resistance R,
gives a current I = (10 ± 0.5) ampere. Calculate the percentage error in R. Given
R = V/I.
Solution:
Here V = (100 ± 2) volt
I = (10 ± 0.5) ampere
R = V/I = 100/10 = 10 ohmNow, relative error in resistance
∆R ∆V ∆I
--- = ---- + ---
R V I
= ± [ 2/100 + 0.5/10]
= ± 0.07
% Error in R = ± 0.07 x 100 = 7%
(4) Error in division of quantitiesSupposex = a/b and
a = absolute error in measurement of a,∆
b = absolute error in measurement of b∆
x = absolute error in calculation of x, i.e. division of ‘a’ and ‘b’.∆
The maximum fractional error in x is x a b∆ ∆ ∆
= ---- = ± ----- + ----- x a b
(5) Error in quantity raised to power:
Suppose x = am/bn and
47

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 48/422
Physics XI
EEE Consortium
a=absolute error in measurement of a,∆
b=absolute error in measurement of b∆
x=absolute error in calculation of x i.e. division of ‘a’ and ‘b’.∆
The maximum fractional error in x is x m a n b∆ ∆ ∆
= ---- = ± ------- + -------
x a b
.’. % error in the value of ‘x’ = m (% error in value of a) + n (% error in value of b)
*Note:The quantity which have maximum power must be measured carefully
because it's contribution to error is maximum.
Example 4
An experiment measures quantities a, b and c and X is calculated from the
formula:
X = ab2/c3
The percentage errors in a, b and c are ±1%, ±3% and ±2% respectively. What is
the percentage error in X?
Solution : Here X = ab2/c3
∆a /a = ± 1%,∆b/b = ± 3%,
∆c/c = ± 2%.
% error in X is given by
(∆X/X) =[(∆a/a)+2(∆b/b)+3(∆c/c)]x100%
= ± [1% +2 x 3% + 3 x 2%]
= ± 13%.
1.7 Dimensional Analysis
Dimensions of a physical quantity are the powers to which the symbols of
fundamental quantities must be raised to specify those quantities.
We know that
velocity =displacement / time
48

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 49/422
Physics XI
EEE Consortium
Dimensionally [v]=[L]/[T] =[M0LT-1]
Here [M], [L] and [T] are the dimensions of the fundamental quantities mass,
length and time respectively. Therefore velocity has zero dimensions in mass, one
dimension in length and – 1 dimension in time. Thus the dimensional formulafor velocity is [M0LT-1] or simply [LT-1]. The dimensions of fundamental quantities
are given in Table 1.4 and the dimensions of some derived quantities are given in
Table 1.5
Table 1.4Dimensions of fundamental quantities
Fundamental qunatity Dimensions
Length LMass M Time T Temperature KElectric current ALuminous intensity cd Amount of substance mol
Table 1.5Dimensional formulae of some derived quantities
Physical
Quantity
Mathematical
Formula
Dimension
al Formula Area
Denisty
Acceleration
Momentum
Force
Work/energy
Power
Radius of
gyration
Pressure
Length x Breadth
Mass/Volume
Velocity/Time
Mass x Velocity
Mass x
AccelerationForce x
displacement
Work/time
(Distance)2
[L2]
[L3]
[LT-2]
[MLT-1]
[MLT-2]
[ML2 T-2]
[ML2 T-3]
[L2]
[ML-1 T-2]
49

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 50/422
Physics XI
EEE Consortium
Surface
Tension
Frequency
Torque
Force/area
Force/length
1/time period
Force x
displacement
[MT-2]
[T-1]
[ML
2
T
-2
]
Dimensional quantities
Constants which possess dimensions are called dimensional constants. Planck’s
constant and universal gravitational constant are dimensional constants.
Dimensional variables are those physical quantities which possess dimensions
but do not have a fixed value. Example - velocity, force, etc.
Dimensionless quantities
There are certain quantities which do not possess dimensions. They are called
dimensionless quantities. Examples are strain, angle, specific gravity, etc. They
are dimensionless as they are the ratio of two quantities having the same
dimensional formula.
Principle of homogeneity of dimensions An equation is dimensionally correct if the dimensions of the various terms on
either side of the equation are the same. This is called the principle of homogeneity
of dimensions. This principle is based on the fact that two quantities of the same
dimension only can be added up, the resulting quantity also possessing the same
dimension.
The equation A + B = C is valid only if the dimensions of A, B and C are the
same.
1.7.1 Uses of dimensional analysis
The method of dimensional analysis is used to
(i) convert a physical quantity from one system of units to another.
(ii) check the dimensional correctness of a given equation.
50

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 51/422
Physics XI
EEE Consortium
(iii) establish a relationship between different physical quantities in an equation.
(i) To convert a physical quantity from one system of units to another
The knowledge of physical quantities and their dimensions helps one to change a
particular quantity from one system of units to another as seen from the example
below.
Example 5
Given the value of G in cgs system is 6.67×10-8 dyne-cm2g-2. Calculate its value in
SI units.
Solution : In cgs system, G = 6.67 × 10-8 In SI system, G = ?M1 = 1g M2 = 1 kg
L1 = 1 cm L2 = 1m
T1 = 1s T2= 1 s
The dimensional formula for gravitational constant is [M-1L3 T-2]
In CGS system dimensional formula for G is [M1 xL1 y T1z]
In SI system dimensional formula for G is [M2 xL2 y T2z]
Here x = -1, y = 3 and z = -2
∴ G [M2 xL2 y T2z] = Gcgs [M1 xL1 y T1z]Or G = Gcgs[M1/M2] x [L1/L2] y [T1/T2]z
= 6.67x10-8[1g/kg]-1[1cm/m]-3[1s/s]-2
=6.67x10-8[1/1000]-1[1/100]-3[1/1]-2
= 6.67 x 10-11 N m2 kg-2.
(ii) To check the dimensional correct -ness of a given equation
Let us take the equation of motion
s =ut + ½at2
Applying dimensions on both sides,
[L] = [LT]-1[T] + [LT]-2 [T2]
(½ is a constant having no dimension)
[L] = [L] + [L]
51

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 52/422
Physics XI
EEE Consortium
As the dimensions on both sides are the same, the equation is dimensionally
correct.
(iii) To establish a relationship between the physical quantities in an equation
The concept of dimensions helps us to derive a relation between various physical
quantities. Let us find an expression for the time periodT of a simple pendulum.
The time periodT may depend upon (i) massm of the bob
(ii) length ’l’of the pendulum and (iii)acceleration due to gravityg at the place
where the pendulum is suspended.
(i.e)Tαmxlygz ------------- (1)
OrT =k mxlygz
Wherekis a dimensionless constant of proportionality. Rewriting equation (1)
with dimensions,
[T1] = [Mx][Ly][LT−2]z
[T1] = [MxLy+zT−2z]
Comparing the powers of M, L and T on both sidesx= 0,y+z= 0 and−2z=1
Solving forx,yandz,
x= 0,y= ½ andz= –½
From equation (1),
T=km0l½g−½
T = k [l/g]1/2= k √ l /g
Experimentally the value ofkis determined to be 2π.
52

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 53/422
Physics XI
EEE Consortium
∴ T =2π √ l
g
Do You Know? When dimensions are given, the
physical quantity may or may not be
unique. However, if a physical quantity
is given, its dimensions are unique.
1.7.2 Limitations of Dimensional Analysis
(i) The value of dimensionless constants cannot be determined by this method.
(ii) This method cannot be applied to equations involving exponential andtrigonometric functions.
(iii) It cannot be applied to an equation involving more than three physical
quantities.
(iv) It can check only whether a physical relation is dimensionally correct or not.
It cannot tell whether the relation is absolutely corrector not. For example
applying this techniques = ut + ¼ at2 is dimensionallycorrect whereas the
correct relation is
s = ut + ½ at2
Exercices
Multiple Choice Questions
1.The number of significant figures in 5418000 are –
(i) 4 (ii) 5
(iii)6 (iv) 7
2.The length and breadth of a metal sheet are 3.124m and 3.002mrespectively. The area of this sheet
up to four correct significantfigures is -(i) 9.37 m2 (ii) 9.378 m2
53

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 54/422
Physics XI
EEE Consortium
(iii) 9.3782 m2 (iv) 9.37824 m2
3.The percentage error in the measurement of mass and speed are 2 % and
3% respectively. The error in kinetic energy obtained by measuring mass and
speed will be(i) 12% (ii) 10%(iii) 8% (iv) 5%4.A force of F is applied on to a square plate of side L. If percentage error in
determining L is 2% and that in F is 4%, what is the permissible error in
pressure?(i)2% (ii) 4%(iii)6% (iv) 8%
5.A physical quantity P is related to four variables a, b, c and d as follows:
P = a3 b2/√cd The percentage errors in a, b, c and d are 1%, 3%, 4% and 2% respectively.
What is the error in quantity P ?(i) 12% (ii) 16%(iii) 20% (iv) 24%6.Which of the following pair does not have similar dimensions?(i) Stress and pressure(ii) Angle and strain(iii) Tension and surface tension
(iv) Planck’s constant and angular momentum7.Which of the following is a dimensional constant?(i) Refractive index(ii) Poisson’s ratio(iii) Relative density(iv) Gravitational constant8.A sphere of radius a moves with velocity v in a medium and the force F
acting on it is given by : . F = 6πηav The dimensions of ‘η’ will be
(i) ML-1 T-1 (ii) MT-1(iii) MLT-2 (iv) ML-3
9.Two quantities A and B have different dimensions. Which mathematical
operation given below is physically meaningful?(i) A/B (ii) A + B(iii) A – B (iv) None
54

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 55/422
Physics XI
EEE Consortium
10.In the standard equation:snth = u +1/2 [2n – 1]
What dimensions do you give to Snth?(i) MoLTo
(ii) MLT-1
(iii) MoL-1 T(iv) MoLo T-1
Exercise Questions :
1. Write the dimensional formula for the following a) Impulse b) Kinetic energy.2.Can there be a physical quantity which has no units and no dimensions?
3.Energy density and pressure have the same dimensions. Comment.4.How many ergs are there in 1 kilo-watt hour?5. Write the number of significant figures of the following measuring
quantities :(i) 400 m (ii) 0.008 Kg
6.Give three examples of dimensionless variables?7. The mass of a body is measured by two persons is 10.2 kg and 10.23 kg.
Which one is more accurate and why?8. The value of Stefan’s constant is 5.67x 10-8 Js-1m-2K-4.Find its value in CGS
system.9.Convert a power of 1 MW on a system with fundamental units 10 kg, 1dm
and 1 min.10. Volume V of water which passes any point of a canal during ‘t’ second is
connected with the cross section A of the canal and the velocity u of water
by the relation
v =K Atu
where ‘K’ is dimensionless constant. Verify the correctness of the relation.
Answers to MCQ:
1.(i) 2.(ii) 3.(iii) 4.(iv) 5.(i) 6.(iii) 7.(iv) 8.(i)
9.(i) 10.(ii)
55

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 56/422
Physics XI
EEE Consortium
56

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 57/422
Physics XI
EEE Consortium
57

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 58/422
Physics XI
EEE Consortium
58

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 59/422
Physics XI
EEE Consortium
59

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 60/422
Physics XI
EEE Consortium
60

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 61/422
Physics XI
EEE Consortium
61

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 62/422
Physics XI
EEE Consortium
62

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 63/422
Physics XI
EEE Consortium
63

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 64/422
Physics XI
EEE Consortium
64

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 65/422
Physics XI
EEE Consortium
65

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 66/422
Physics XI
EEE Consortium
66

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 67/422
Physics XI
EEE Consortium
67

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 68/422
Physics XI
EEE Consortium
3.1 Introduction
Rectilinear Motion − What it means?
Motion of a body that moves along a straight line such as the motion of a carmoving on a straight road.
Position − How to Describe it?
68

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 69/422
Physics XI
EEE Consortium
• Locating an object requires finding its position relative to a reference point.
• Reference point is often taken as the origin of a coordinate system.
• The coordinates (x, y, z) of the object describe the position of the object
with respect to the coordinate axes.
• Coordinate system along with time constitutes a frame of reference.
Path Length
• Length of the actual path traversed by a body in a given time
• It is ascalar quantity. Therefore, only magnitude is important, not the
direction of movement. (Implies that path length can never be negative)
Displacement
• A change of position ∆R from coordinateR1 (x1, y1, z1) to coordinateR2(x2, y2, z2)
• This is the shortest distance between the initial and final position of a body.
• It is a vector quantity. Therefore, both magnitude and direction are
important to describe displacement. (Implies that displacement can be
negative depending on the initial and final positions of a body in a coordinate
system).
69

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 70/422
Physics XI
EEE Consortium
How Path Length and Displacement are Different?
Consider this example.
If an object goes from A to B and then B to C in time ‘t’, then
• path length = AB + BC (arithmetic sum of the distances)
• displacement,∆x = AC−→− (shortest distance between points A and C)
Example 3.1
A particle moves along a circle of radius ‘r’. It starts from A and moves clockwise.Calculate the distance travelled by the particle and its displacement in each case. Take centre of the circle as the origin.
i. (i) From A to B (ii) From A to C
ii. (iii) From A to D
iii. (iv) In one complete revolution
70

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 71/422
Physics XI
EEE Consortium
Solution:
(i) Distance travelled by the particle from A to BDisplacement =∣ AB∣=√OA2+OB2
=√r2+r2
=2√r Direction is along negative X and Y axis.
(ii) Distance travelled by particle from A to C is
Displacement =|AC|= 2r Direction is along negative X axis.
(iii) Distance travelled from A to D
Displacement=∣ AD∣=√r2+r2
=2√r Direction is along Positive X and Y axis.
(iv) For one complete revolution i.e., motion from A to A,
Total distance travelled = 2πr
Displacement = 0 [the final position coincides with the initial position]
71

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 72/422
Physics XI
EEE Consortium
Example 3.2
A man is walking from his office to home. He leaves his office and walks 400 m
west. He then turns and walks 700 m north. Determine the magnitude anddirection of his resultant displacement?Solution:
His resultant displacement is given by:
S = √4002+7002
S = √ 160000+490000
S = √ 650000
S = 806.23 meters.
Though total distance travelled is 1100 m but resultant displacement is 806.23 m
in North – West direction.
Example 3.3
A bus is heading city B from city A via city C. The bus started from city A andmoved towards city C in south direction at the distance of 100 km. It then turnsleft and moves for another 200 km before reaching the city B. Find the totaldistance travelled by the bus and the magnitude and resultant of thedisplacement of the bus from city A?
Solution:1. Total distance travelled by the bus is . D = 100 + 200 = 300 km2. Magnitude of the displacement is,|S| = √,1002+2002
= √,50000−−−−−= 223.61 km
3. Direction of resultant displacement is south – west.
Speed
• Speed =
72

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 73/422
Physics XI
EEE Consortium
• It is a scalar quantity, which means that it requires no direction (it impliesthat speed cannot be negative).
• Instantaneous speed is the speed at a particular instant (when the intervalof time is infinitely small).
i.e., instantaneous seed:
Average Speed
• Average speed of a particle is defined as the total distance travelled by theparticle divided by the total time taken during which the motion took place.
• Suppose that a car is covering a distance of 160 km from A to B and coverssuccessive 40 km distances in time 1.2 h, 1.4 h, 1.6 h, and 0.9 h respectively.
The speed of car is different at different at every successive interval. In suchcases, we need to find the average speed. Average speed = Total distance travelled Total time taken
Average Velocity
• Average velocity is the ratio of the change in displacement x∆ to the timeinterval t∆ in which the change in displacement occurred.
• Ifx1 andx2 are the positions of a particle at timest1 andt2 respectively thenthe magnitude of displacement of the particle in time interval∆t = (t2 -t1) is
x→∆
= x2 – x1 Average velocity vavg = Displacement / Time taken
= (x2 – x1) / (t2 - t1)=x /t∆ ∆
Velocity
• Velocity =
• It is a vector quantity. Therefore, the direction of movement is taken intoconsideration (it implies that velocity contains algebraic sign).
• In aposition-time graph, the slope of the curve indicates the velocity andthe angle of the slope with thex-axis indicates the direction.
73

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 74/422
Physics XI
EEE Consortium
• Average velocity is given by :
wherex2 andx1 are the positions of the object att2 andt1respectively• Instantaneous velocity is at a given instant (slope at a particular point onthex – tcurve).
• When the motion is not uniform sometimes instantaneous velocity has moreimportance than average velocity.
Uniform Motion:
In uniform motion, a body undergoes equal displacements in equal intervals oftime.
74

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 75/422
Physics XI
EEE Consortium
Acceleration
• Acceleration is the rate of change of the velocity of an object.• Average acceleration, a=Change in velocity/Time taken
= (v2-v1) /(t2-t1) =v/t∆ ∆
• In a velocity-time graph, the slope of the curve indicates the averageacceleration and the angle of the slope indicates the direction of change of the velocity.
• Instantaneous acceleration is the given at a particular instant (slope at aparticular point on (v – t)curve
In this case, the rate of change of velocity with time remains constant.Graphically, such motion can be represented as :
Graphical Representation of Accelerated Motion
75

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 76/422
Physics XI
EEE Consortium
Terminology
u → Initial velocity ,v → Final velocity
a → Acceleration ,t → Time
x0→ Initial position ,x→ Position at ‘t’
76

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 77/422
Physics XI
EEE Consortium
Equations of MotionCalculus Method
(i) Velocity − Time Relation
Acceleration,
a
or dv =adt
Integrating the above,
⇒ v − u =at
.’.v = u + at - - - - - - - - (1)
(ii) Displacement−Time Relation
Instantaneous velocity,
or dx =vdt
or dx = (u +at)dt [ ‘.’ eqn – 1]
Integrating the above relation,
77

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 78/422
Physics XI
EEE Consortium
or (x − x0) =ut + ½ at2
.’. x =x0 +ut + ½ at2- ------------ (2)
(iii) Velocity−Displacement Relation
The acceleration is given as :
or a dx =v dv
Integrating the above expression,
or
or a ( x− x0 )=v2
2 −
u2
2
78

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 79/422
Physics XI
EEE Consortium
i.e., v2 −u2 = 2a (x −x0) ------------ (3)
Equations of Motion (Graphical method)
Let an object is moving with uniform acceleration.
Let the initial velocity of the object = uLet the object is moving with uniform acceleration ‘a’Let object reaches at point B after time, t and its final velocity becomes ‘v’Draw a line parallel to x-axis DA from point, D from where object starts moving.Draw another line BA from point B parallel to y-axis which meets at E at Y-axis.Let OE = time, t
Now, from the graph,
BE = AB + AE
⇒ v = DC + OD (‘.’ AB = DC & AE = OD)
⇒ v = DC + u (‘.’ OD = u)
⇒ v = DC + u ------------------- (i)
79

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 80/422
Physics XI
EEE Consortium
Above equation is the relation among initial velocity (u), final velocity (u),
acceleration (a) and time (t). It is calledfirst equation of motion.
Now, the distance covered by the object in the given time ‘t’ is given by the area of
the trapezium ABDOE
Let in the given time, t the distance covered by the moving object = s =
The above expression gives the distance covered by the object moving with
uniform acceleration. This expression is known assecond equation of motion.
The distance covered by the object moving with uniform acceleration is given by
the area of trapezium ABDO Therefore,
80

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 81/422
Physics XI
EEE Consortium
The above expression gives the relation between position and velocity and is
called thethird equation of motion.
Motion of an Object under Free Fall:
As object is released from rest, thus,u = 0 The equations of motion become –v = 0 −gt = −9.8t m s−1
y = 0 – ½gt2 = −4.9t2 mv2 = 0 − 2gy = −19.6y m s−1
Note
Distance travelled innth second ofuniformly accelerated motion is given by the relation,
81

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 82/422
Physics XI
EEE Consortium
Example 3.4
A particle starts with an initial velocity 5.0 ms−1along the positivex-direction andit accelerates uniformly at the rate of 2 ms−2.(i) Find the distance travelled by it in the first three seconds.(ii) How much time does it take to reach the velocity 9.0 ms−1?(iii) How much distance will it cover in reaching the velocity 9.0 ms−1?
Solution:Hereu = 5 ms−1,a = 2 ms−2
(i) We have to calculateS, whent = 3 s
(ii) We have to calculatet, when v = 9 ms−1
v=u +at 9 = 5 + (2)t
9 − 5 = 2t
⇒ 2t = 4 t = 2 s(iii) Here,v = 9 m s−2,S = ?
v2
=u2
+ 2aS (9)2 = (5)2 + 2 × 2 ×S 81 = 25 + 4S ⇒ 4S = 81 − 25 ⇒ 4S = 56 ⇒ S = 14 m
82

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 83/422
Physics XI
EEE Consortium
Note: For computation purpose we take the value of acceleration due togravity(g) in the downward motion of a body as positive and in the upwardmotion as negative.
Example 3.5
A ball is thrown vertically upwards with a velocity of 30 ms−1 from the top of amulti-storeyed building. The height of the point from where the ball is thrown is20.0 m from the ground.(i) How high will the ball rise?(ii) How long will it be before the ball hits the ground? Takeg = 10 ms−2
Solution:
(i) For vertical motion,u = 30 ms
−1
a = −10 ms−2 (Upward motion)v = 0 (Highest point)S = ?t =t1 (say)
As v2 =u2 + 2aS,⇒ 0 = (30)2 + 2 (−10)S⇒ S = 45 m As v =u +at,
0 = 30 + (−10)t1⇒ t1 = 3 s(ii) For vertical downward motion,
u = 0 ms− 1 ,a = 10 ms− 2
.’. S = (45 + 20) m = 65 mt=t2 (say)
As ,
⇒
⇒ = 13 s
83

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 84/422
Physics XI
EEE Consortium
⇒
∴ Total time =t1+t2=(3 + 3.6) s = 6.6 s
Relative Velocity
The relative velocity of a body A with respect to another bodyB ( v AB) is the timerate at which Achanges its position with respect toB.
(a) When both bodies move in same direction
If A andB are moving in the same direction, then the resultant relative velocity is: v AB = v A – vB(b) When both bodies move in opposite directions
If A andB are moving in the opposite directions, then the resultant relative
velocity is : v AB = v A + vB
Example 3.6
Two carsX and Yare moving with speeds 60 kmh−1 and 80 kmh−1 respectivelyalong parallel straight paths. Both the cars started from the same position. Whatis the position of carX with respect to Y after 15 minutes?Solution:
Speed of carX,v x = 60 km h−1
Speed of car Y,v y = 80 km h−1
Both the cars are moving in the same direction. Thus, relative velocity of carX with respect to car Y,vxy =vx −vy= (60 − 80) km h−1
= −20 km h−1
∴ Separation of carX with respect to car Y after 15 minutes is
84

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 85/422
Physics XI
EEE Consortium
== −5 km[ Distance = Speed × Time]
Example 3.7 Two trains 110 m and 90 m in lengths are running in opposite directions with velocities 75 km h−1 and 64 km h−1. In what time will they completely cross eachother?Solution:
Here,v A = 75 km h−1
vB = −64 km h−1 [ ‘.’ Trains are moving in opposite directions]Length of train A,l A = 110 mLength of trainB,lB = 90 mRelative velocity of the two trains is :
v AB =v A −vB = 75 − (−64)= (75 + 64) km h−1
= 139 km h−1
= 139 km h−1
= 38.6 m s−1
Total distance to be travelled by each train for completely crossing the other train= (110 + 90) = 200 m∴ Time taken by each train to cross the other train
= 5.2 s
Motion along a Circular Path:
Motion of an object along a circular path is called circular motion. Since, on a
circular path the direction of the object is changing continuously to keep it onthe path, the motion of the object is called accelerated motion.
85

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 86/422
Physics XI
EEE Consortium
If the radius of circle is ‘r’, then Therefore, circumference = 2πrLet time ‘t’ is taken to complete one rotation over a circular path by any object,
Where, v = velocity, r = radius of circular path and t = timeMotion of earth around the sun, motion of moon around the earth, motion of atop, motion of blades of an electric fan, etc. are the examples of circular moti
Centripetal Acceleration
Acceleration is the velocity change with respect to time. When it is constant for a
particular period of time then it is calledconstant acceleration. It can be of
average acceleration, instantaneous acceleration, when an object undergoes
circular motion then the acceleration is of three types that are centripetalacceleration, tangential, and angular acceleration.
The essential part of roller coaster is a curve or a circular path which
undergoescentripetal acceleration. Its direction is in the direction of centre of
86

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 87/422
Physics XI
EEE Consortium
circular path. When we sit in train then the force which feel by us pushing us
toward the outer edge of the circular path, this is calledcentrifugal force. This
is not an actual force while it is inertia of our body or resistance to direction of
train. Here, we discuss about centripetal acceleration in which the direction istowards the centre of circular path and its two main factors that are tangential
and radial and its mathematical formula.
Centripetal Acceleration
"The centripetal acceleration is the rate of change of tangential velocity."
When an object is moving with uniform acceleration in circular direction, it is
said to be experiencing the centripetal acceleration.
To understand this type of acceleration clearly, lets understand three differenttypes of accelerations properly.
1.Linear Acceleration: Speed of the object changing while direction is constant.
2.Centripetal Acceleration: Speed of the object is constant while direction is
changing.
3. Angular Acceleration: Both the speed and direction of the object are changing.
There are a few key points to be noted about the centripetal acceleration :
1. The direction of the centripetal acceleration is always along the radius vector of the circular direction.
2. The magnitude of the centripetal acceleration can be calculated by the
tangential speed and angular velocity.
3. A object traveling in a circular direction experiences both the centripetal
and the angular acceleration.
4. The centripetal acceleration and angular acceleration are always 90o to
each other
Example 3.8 A 5-kg object moves at a constant speed of 10 m/s in a 5.0 m radius circle. Whatis the object's acceleration?Solution:
From the problem it is clear that we have following variables available with us,
87

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 88/422
Physics XI
EEE Consortium
vt = 10 m/s;
r = 5 meters;
m = 5 kg
Now since object is moving in the circle so its acceleration is calculated bycalculating the centripetal acceleration
ac =v2t/r
ac = 102 /5 = 100/5
‘.’ ac = 20m/sec2
So, acceleration of the object is 20 m/s2
Example 3.9
If the tangential velocity of an object is increased by the factor of ‘2’, i.e. doubled,then what is the effect on its centripetal acceleration?
Solution:
From the equation of centripetal acceleration it is clear that the centripetal
acceleration is directly proportional to the square of the tangential velocity so if
the tangential velocity is increased by a factor of ‘2’ the centripetal acceleration is
increased by the factor of ’4’.
Example 3.10
If the radius of the curve on which an object is travelling is decreased by the
factor of ‘2’, i.e. halved, then what is the effect on its centripetal acceleration?
Solution:
From the equation of centripetal acceleration it is clear that the centripetal
acceleration is inversely proportional to the radius of the curvature so if the
radius is decreased by a factor of ‘2’ centripetal acceleration increases by the
factor of ’2’.
Derivation of Centripetal Force
88

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 89/422
Physics XI
EEE Consortium
The force of a moving body is given as : F = ma ..................(1)
From the figure, we can write the expression :
PS = PQ + QS
∆v = v2 - v1 The triangle AOB and PQS are similar. So,
∆v( AB) = v x r
AB = arc AB = v∆t
∆v(v∆t) = vr
∆v / ∆t = v2/r
‘.’ a = v2/r
Substitute this value in (1) we get the centripetal forceF = m v2/r = mrω2
Exercises
Multiple Choice Questions:
1. Which of the following graphs can possibly represent the 1-D motion of a
particle?
89

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 90/422
Physics XI
EEE Consortium
A) B)
C) D)
2. One train A 120m long is moving in a direction with a speed of 20 m/s.
Another train B 130m long is moving with a speed of 30 m/s in the opposite
direction. The train B crosses the train A in a time
A) 5s B) 36s
C) 38s D) None of these
3.Use the following information to answer the next question.
The speed of a motor launch in still water is 8 m/s. The speed of the stream is 4
m/s. A large piece of cork drops from motor launch as it begins travelling
upstream. After travelling 5 km, the motor launch turns back to catch the
floating cork. How long does the motor launch take to reach the cork?
A) 22.45 min B) 27.78 minC) 36.34 min D) 41.67 min
4. What do you infer, if s-t graphs of two cyclists meet at a point?
(A) They collide
(B) They pass each other90

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 91/422
Physics XI
EEE Consortium
(C) They are at rest
(D) They are startng from rest
5. Use the following information to answer the next question.
Consider the following statements regarding the motion of a particle in a plane.
I. The acceleration of a uniform circular motion is constant.
II. At the highest point of a parabolic trajectory, the speed of the particle is
minimum.
III. The horizontal component of velocity of a projected particle is constant
throughout the motion.
Among the given statements,
(A) only statementI is incorrect
(B) only statementIII is incorrect
(C) both statementsI andII are incorrect
(D) both statements II andIII are incorrect
6. The velocity-time graph of a motion starting from rest with uniform
acceleration is a straight line
A) parallel to time axis
B) parallel to velocity axis
C) not passing through origin
D) having none of the above characterstics
Answers :
91

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 92/422
Physics XI
EEE Consortium
1. C 2. A 3. D 4. B
5. A 6. A
92

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 93/422
Physics XI
EEE Consortium
93

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 94/422
Physics XI
EEE Consortium
94

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 95/422
Physics XI
EEE Consortium
95

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 96/422
Physics XI
EEE Consortium
96

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 97/422
Physics XI
EEE Consortium
97

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 98/422
Physics XI
EEE Consortium
98

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 99/422
Physics XI
EEE Consortium
99

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 100/422
Physics XI
EEE Consortium
4.1 Introduction
In the last chapter we have learned about the motion of a particle along a
straight line.
• Straight line motion or rectilinear motion is motion in one dimension. Now
in this chapter, we will consider both motion in two dimensions and three
dimensions.
• In two dimensional motion path of the particle is constrained to lie in a
fixed plane. Examples of such motion are projectile shot from a gun, motion ofmoon around the earth, circular motion and many more.
• To solve problems of motion in a plane, we need to generalize kinematic
language of previous chapter to a more general using vector notations in two
and three dimensions.
100

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 101/422
Physics XI
EEE Consortium
4.2 Scalars And Vectors
The mathematical quantities that are used to describe the motion of objects can
be divided into two categories. The quantity is either a vector or a scalar. Thesetwo categories can be distinguished from one another by their distinct
definitions:
• Scalars are quantities that are fully described by a magnitude (or
numerical value) alone. Examples of scalar quantities are: the distance
between two points, mass of an object, the temperature of a body and the time
at which a certain event happened. The rules for combining scalars are the
rules of ordinary algebra. Scalars can be added, subtracted, multiplied and
divided just as the ordinary numbers.• Vectors are quantities that are fully described by both a magnitude and a
direction and they obey the laws of vector algebra like the triangle law of
addition or the parallelogram law of addition. Examples of vector quantities
are: displacement, velocity, acceleration, force and momentum.
To represent a vector, we can use a bold face type or it is often represented by an
arrow placed over a letter. Thus, both v and v represent the velocity vector. The
magnitude of a vector is often called its absolute value, indicated by |v
| =v.
4.2.1 Equality of Vectors
Two vectors, A andB are equal if they have the same magnitude and direction,
regardless of whether they have the same initial points, as shown in fig 4.1(a). In
general, equality is indicated as A = B.
Figure 4.1(a) (b) (c)
A vector having the same magnitude as A but in the opposite direction to A is
denoted by-A, as shown in fig 4.1(b).101

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 102/422
Physics XI
EEE Consortium
In Fig. 4.1(c), vectors A and B have the same magnitude but they are not equal
because they have different directions.
4.2.2 Multiplication Of Vectors By Real NumbersMultiplying the vector A by the positive scalarc is equivalent to adding togetherc
copies of the vector A.
Thus 3 A = A + A + A.
Multiplying a vector by a scalar will get you a vector with the same direction, but
different magnitude, as the original.
(a) (b)
(c) The result of multiplying A by λ is a vector in the same direction as A, with a
magnitude of λA. If λ is negative, then the direction of A is reversed by scalar
multiplication. The factor λ by which a vector A is multiplied could be a scalar
having its own physical dimension. Then, the dimension of λ A is the product of
the dimensions of λ and A. For example, if we multiply a constant velocity vector
by duration (of time), we get a displacement vector.
4.2.3 Addition And Subtraction of Vectors — Graphical Method
The head-to-tail method is a graphical way to add vectors, ttail of the vector is
the starting point of the vector, and the head (or tip) of a vector is the final,
pointed end of the arrow. The resultant vectorR is defined such that A+B=R The
102
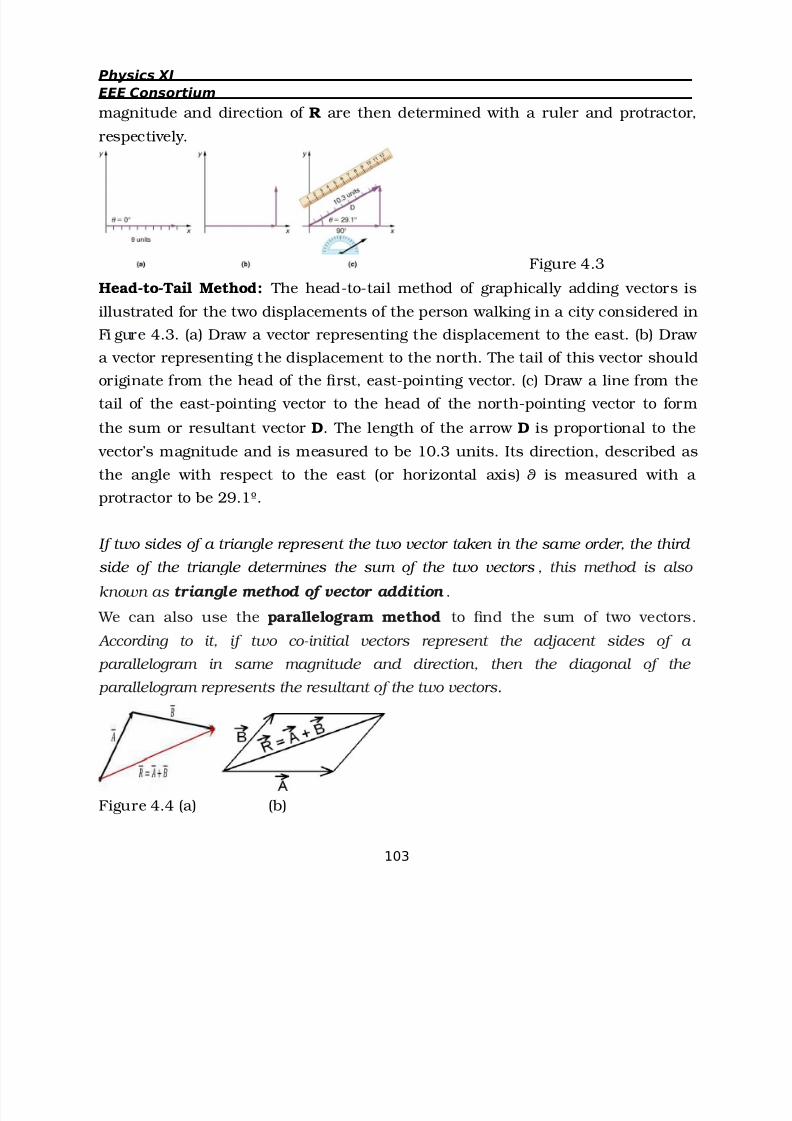
7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 103/422
Physics XI
EEE Consortium
magnitude and direction ofR are then determined with a ruler and protractor,
respectively.
Figure 4.3
Head-to-Tail Method: The head-to-tail method of graphically adding vectors is
illustrated for the two displacements of the person walking in a city considered in
Figure 4.3. (a) Draw a vector representing the displacement to the east. (b) Draw
a vector representing the displacement to the north. The tail of this vector shouldoriginate from the head of the first, east-pointing vector. (c) Draw a line from the
tail of the east-pointing vector to the head of the north-pointing vector to form
the sum or resultant vectorD. The length of the arrowD is proportional to the
vector’s magnitude and is measured to be 10.3 units. Its direction, described as
the angle with respect to the east (or horizontal axis)θ is measured with a
protractor to be 29.1º.
If two sides of a triangle represent the two vector taken in the same order, the thirdside of the triangle determines the sum of the two vectors, this method is also
known astriangle method of vector addition.
We can also use theparallelogram methodto find the sum of two vectors.
According to it, if two co-initial vectors represent the adjacent sides of a
parallelogram in same magnitude and direction, then the diagonal of the
parallelogram represents the resultant of the two vectors.
Figure 4.4 (a) (b)
103

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 104/422
Physics XI
EEE Consortium
Both the triangle and the parallelogram rules of addition are procedures that are
independent of the order of the vectors; that is, if we find the resultant ofB+ A,
the same vectorRis obtained.
Thus, vector addition iscommutative: A+B=B+ A The addition of vectors also obeys the associative law as shown Fig. 4.5. The
result of adding vectors AandBfirst and then adding vectorCis the same as
the result of addingBandCfirst and then adding vector A:
( A+B) +C= A+ (B+C)
Figure 4.5 Illustrating the associative law of vector addition.
Vector subtraction is a straightforward extension of vector addition. To definesubtraction (say we want to subtractB from A, written A –B, we must first define
what we mean by subtraction. Thenegative of a vectorB is defined to be –B; that
is, graphicallythe negative of any vector has the same magnitude but the opposite
direction, as shown inFigure 4.2(b). In other words,B has the same length as –B,
but points in the opposite direction. Essentially, we just flip the vector so it
points in the opposite direction.
A – B = A +( –B).If two opposite vectors are added
A+ (– A), the sum will be a zero vector. Since the magnitudes of the two vectors
are the same, but the directions are opposite, the resultant vector has zero
104

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 105/422
Physics XI
EEE Consortium
magnitude with no specified direction and is represented by0called anull
vectoror azero vector:
A – A=0|0|= 0
The null vector also results when we multiply a vector A by the number zero. Themain properties of0are:
A+0= A
λ x0=0
0 x A=0
4.3 Resolution of a Vector
The process of splitting a vector into various parts or components is called
"Resolution of Vector"
These parts of a vector may act in different directions and are called "components
of vector".
We can resolve a vector into a number of components .Generally there are three
components of vector viz.
Component along X-axis called x-componentComponent along Y-axis called Y-component
Component along Z-axis called Z-component
Here we will discuss only two components x-component & Y-component which
are perpendicular to each other. These components are called rectangular
components of vector.
Method of resolving a vector into rectangular components
Consider a vector acting at a point making an angleθ with positive X-axis.
105

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 106/422
Physics XI
EEE Consortium
Vector is represented by a line OA. From point A draw a perpendicular AB on
X-axis. Suppose OB and BA
represents two vectors. Vector OA is parallel to X-axis and vector BA is parallel to
Y-axis.
Magnitude of these vectors are v x and v y respectively. By the method of head to
tail we notice that the sum of these vectors is equal to vectorv .
Thus v x and v y are the rectangular components of vectorv .
vx = Horizontal component ofv
vy = Vertical component ofv
Consider right angled triangle ∆OAB,
and
4.4 Position and Displacement Vectors
To describe the position of on object in space we require aposition vector. A
position, location, or radius vector is a vector which represents theposition of
a point P in space in relation to an arbitrary reference origin O. Let P and P be′
the positions of the object initially and at time t, respectively [Fig. 4.1]. We join O
and P by a straight line. Then, OP is theposition vector of the object at time t.
It is represented by a symbol r, i.e.OP = r. Point P is represented by another′106

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 107/422
Physics XI
EEE Consortium
position vector, OP denoted by r. The length of the vector r represents the′ ′
magnitude of the vector and its direction is the direction in which P lies as seen
from O. If the object moves from P to P, the vector PP (with tail at P and tip at P)′ ′ ′
is called thedisplacement vector corresponding to motion from point P (at timet = 0) to point P (at time t = t).′
4.5.1 Average velocity
Consider a particle moving along a curved path in x-y plane shown below in the
figure.
Suppose at any time, particle is at the point P and after some time 't' is at pointP’ where points P and P’ represents the position of particle at two different
points.
107

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 108/422
Physics XI
EEE Consortium
Position of particle at point P is described by the Position vectorr from origin O
to P given byr = xi + y j
where x and y are components ofr along x and y axis
As particle moves from P to P’, its displacement would be would be ∆r which isequal to the difference in position vectorsr andr'. Thus,
∆r =r'-r = (x'i+ y' j) – (xi+y j)
= (x'-x)i+ (y'-y) j = xi+ ∆y j ---(1)
where ∆x = (x'-x) and ∆y = (y'-y)
Now, if ∆t is the time interval during which the particle moves from point P to Q
along the curved path then average velocity ( vavg) of particle is the ratio of
displacement and corresponding time interval,
since vavg= ∆r/∆t, the direction of average
velocity is same as that of ∆r
Magnitude of ∆r is always the straight line distance from P to Q regardless of any
shape of actual path taken by the particle.
Hence average velocity of particle from point P to Q in time interval ∆t would be
same for any path taken by the particle.
4.5.2. Instantaneous velocity
We already know that instantaneous velocity is the velocity of the particle at any
instant of time or at any point of its path.
If we bring point Q more and more closer to point P and then calculate average
velocity over such a short displacement and time interval then
where v is known as the instantaneous velocity of the particle.
108

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 109/422
Physics XI
EEE Consortium
Thus, instantaneous velocity is the limiting value of average velocity as the time
interval approaches zero.
As the point Q approaches P, direction of vector ∆r changes and approaches tothe direction of the tangent to the path at point P. So instantaneous vector at any
point istangent to the path at that point.
Figure on the next page shows the direction of instantaneous velocity at point P.
Thus, direction of instantaneous velocity v at any point is always tangent to thepath of particle at that point.
Like average velocity we can also express instantaneous velocity in component
form,
where v x and v y are x and y
components of instantaneous velocity.
Magnitude of instantaneous velocity is
| v|= √(v x)2+(v y)2 -----------(4)
and angle θ which velocity vector makes with x-axis is,
109

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 110/422
Physics XI
EEE Consortium
tanθ = v x/v y -----------(5)
Expression for instantaneous velocity is
Thus, if expression for the co-ordinates x and y are known as function of time
then we use equations derived above to find x and y components of velocity.
4.6 Average and Instantaneous acceleration
Suppose a particle moves from point P to point Q in x-y plane as shown below in
the figure.
Suppose v1 is the velocity of the particle at point P and v2 is the velocity of
particle at point Q
Average acceleration is the change in velocity of particle from v1 to v2 in time
interval ∆t as particle moves from point P to Q. Thus average acceleration is
Average acceleration is the vector quantity having direction same as that of ∆ v.
Again if point Q approaches point P, then limiting value of average acceleration
as time approaches zero defines instantaneous acceleration or simply the
acceleration of particle at that point. Thus, instantaneous acceleration is –
110

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 111/422
Physics XI
EEE Consortium
Figure below shows instantaneous acceleration ‘a’ at point P.
Instantaneous acceleration does not have same direction as that of velocity vector
instead it must lie on the concave side of the curved surface.
Thus velocity and acceleration vectors may have any angle between 0 to 180
degrees between them.
4.7 Motion with constant acceleration
Motion in two dimensions with constant acceleration we know is the motion in
which velocity changes at a constant rate i.e, acceleration remains constant
throughout the motion
We should set up the kinematic equation of motion for particle moving withconstant acceleration in two dimensions.
Equations for position and velocity vector can be found generalizing the equation
for position and velocity derived earlier while studying motion in one dimension.
111

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 112/422
Physics XI
EEE Consortium
Thus velocity is given by equation
. v= v0+at --------- (8)
where v is velocity vector, v0 is initial velocity vector anda is instantaneous
acceleration vector.Similary position is given by the equation :
r –r0= v0t + ½at2 (9)
wherer0 is initial position vector
i,e
r0= x0i+ y0 j
and average velocity is given by the equation
vav =½ ( v+ v0) (10)
Since we have assumed particle to be moving in x-y plane, the x and y
components of equation (8) and (9) are
v x= v0x+ a xt (11a)
x0= v0xt + ½ a xt2 (11b)
and
v y= v0y+ a yt (12a)
y0=v0yt + ½ a yt2 (12b)
From above equations 11 and 12, we can see that for particle moving in (x-y)
plane although plane of motion can be treated as two separate and simultaneous
1-D motion with constant acceleration.
Similar result also hold true for motion in a three dimension plane (x-y-z)
4.8 Projectile Motion
Projectile motion is a special case of motion in two dimensions when accelerationof particle is constant in both magnitude and direction
112

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 113/422
Physics XI
EEE Consortium
An object is referred as projectile when it is given an initial velocity which
subsequently follows a path determined by gravitational forces acting on it. For
example bullet fired from the rifle, a javelin thrown by the athlete etc
Path followed by a projectile is called its trajectory. Acceleration acting on a projectile is constant which is acceleration due to gravity
(g = 9.81 m/s2) directed along vertically downward direction.
We shall treat the projectile motion in a Cartesian co-ordinates system taking y-
axis in vertically upwards direction and x-axis along horizontal directions
Now x , y components of acceleration of projectile are : a x= 0 and a y= –g.
Since a xis zero, the horizontal component of velocity is constant and vertical
motion is simply a case of motion with constant acceleration.
Suppose at time t = 0 object is at origin of co-ordinate system and velocitycomponents v0x and v0y. From above, a x=0 and a y=-g. From equations 11 and 12
in the previous section, the components of position and velocity are
x = v xt (14a)
v x= v0x (14b)
y = v0y – ½ gt2 (15a)
v y= v0y – gt (15b)
Figure below shows motion of an object projected with velocity v0 at an angle θ0
113

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 114/422
Physics XI
EEE Consortium
In terms of initial velocity v0 and angle θ0 components of initial velocity are
v0x= v0cosθ0 (16a)
v0y= v0sinθ0 (16b)
Using these relations in equation 14 and 15 we find :` x = (v0cosθ0) t (17a)
y = (v0sinθ0) t - ( ½ )gt2 (17b)
v x= v0cosθ0 (17c)
v y= v0sinθ0-gt (17d)
Above equations describe the position and velocity of projectile as shown in fig.5
at any time t.
(a) Equation of Path of projectile
From equation 17a,
t = x/(v0cosθ0)
Now putting this value of ‘t’ in equation 17b, we find
y =(tanθ0 )x-[g/2(v0cosθ0)2]x2 (18)
In equation (18), quantities θ0, g and v0 are all constants and equation (18) can
be compared with the equation
y = ax – bx2
where a and b are constants. This is the equation of the parabola. From this we conclude that path of the
projectile is a parabola as shown in figure 5
(b) Time of Flight
At point of maximum height v y= 0.Thus from equation (17d),
v y= v0sinθ0- gt
0= v0sinθ0- gt
or tm=v0sinθ0/g (19)
Time of flight of projectile which is the total time during which the projectile is in
flight can be obtained by putting y=0 because when projectile reaches ground ,
114

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 115/422
Physics XI
EEE Consortium
vertical distance travelled is zero. Thus from equation (17b)
T =2usinθ0
g ------------- (20)
Maximum height reached by the projectile can be calculated by substituting t =tm in equation 17b,
y = Hm= (v0sinθ0)2/g - (g/2)(v0sinθ0/g)2
H ¿u
2sin
2θ0
2g -------- (21)
(c) Horizontal Range of ProjectileSince acceleration g acting on the projectile is acting vertically , so it has no
component in horizontal direction.
So, projectile moves in horizontal direction with a constant velocity v0cosθ0. So
range R is
R = OA = velocity x time of flight
Maximum range is obtained when sin2θ0=1 or θ0=450. Thus when θ0 =
450 maximum range achieved for a given initial velocity is (v0)2/g.
4.9 Uniform Circular Motion
When an object moves in a circular path at a constant speed then motion of the
object is called uniform circular motion.
In our everyday life, we came across many examples of circular motion for
example cars going round the circular track and many more. Also earth and
other planets revolve around the sun in a roughly circular orbits
115

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 116/422
Physics XI
EEE Consortium
Here in this section we will mainly consider the circular motion with constant
speed
If the speed of motion is constant for a particle moving in a circular motion still
the particles accelerates becuase of costantly changing direction of the velocity.Here in circular motion, we use angular velocity in place of velocity we used while
studying linear motion.
(a) Angular velocity
Consider an object moving in a circle with uniform velocity v as shown below in
the figure.
The velocity v at any point of the motion is tangential to the circle at that point.
Let the particle moves from point A to point B along the circumference of the
circle .The distance along the circumference from A to B is s = R θ (23)
Where R is the radius of the circle and θ is the angle moved in radian's
Magnitude of velocity is
v=ds/dt= R (dθ/dt) ---------- (24)
Since radius of circle remains constant
.’. ω=dθ/dt ---------------(25)
is called the angular velocity defined as the rate of change of angle swept by
radius with time. Angular velocity is expressed in radians per second (rads-1)
From equation 24 and 25, we find the following
v = ω R -------- (26)
116

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 117/422
Physics XI
EEE Consortium
Thus for a particle moving ain circular motion, velocity is directly proportional to
radius for a given angular velocity.
For uniform circular motion i.e, for motion with constant angular velocity the
motion would be periodic which means particle passes through each point ofcircle at equal intervals of time
Time period of motion is given by
T=2π/ω --------- (27)
Since 2π radians is the angle θ in one revolution
If angular velocity ω is constant then integrating equation (25) within limits θ0 to
θ, we find
where θ0 is the angular position at time t0 and θ is the angular position at time
t .The above equation is similar to rectilinear motion result (x-x0)=v(t-t0)
(b) Angular acceleration
Angular acceleration is defined as the rate of change of angular velocity moving
in circular motion with time.
Thus
α=dω/dt=d2θ/dt2 ------------(29)
Unit of angular acceleration is rads-2
For motion with constant angular acceleration
or ω = ω0+ α(t-t0) ------------(30) where ω0 is angular velocity at time t0.
Again since, ω = dθ/dt
or dθ = ωdt then from equation 30,
117

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 118/422
Physics XI
EEE Consortium
If in the beginning t0=0 and θ0=0 the
angular position at any time t is given by : θ = ωt+( ½ )αt2
This result is of the form similar to what we find in case of uniformly accelerated
motion while studying rectilinear motion.
118

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 119/422
Physics XI
EEE Consortium
119

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 120/422
Physics XI
EEE Consortium
120

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 121/422
Physics XI
EEE Consortium
121

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 122/422
Physics XI
EEE Consortium
122

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 123/422
Physics XI
EEE Consortium
123

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 124/422
Physics XI
EEE Consortium
5.1 Introduction
Newton's laws of motion are threephysical laws that together laid the
foundation forclassical mechanics. They describe the relationship between a
body and theforces acting upon it, and itsmotion in response to said forces.
They have been expressed in several different ways over nearly three
centuries and can be summarised as follows:
5.1.1First law: When viewed in aninertial reference frame, an object either
remains at rest or continues to move at a constant velocity, unless acted upon by
an externalforce.
The first law can be stated mathematically as
124

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 125/422
Physics XI
EEE Consortium
Consequently,
• An object at rest will stay at rest unless an external force acts upon it.
• An object in motion will not change its velocity unless an external force acts upon
it.
There are therefore two clauses or parts to Newton’s first law - one that predicts
the behaviour of stationary objects and the other that predicts the behaviour of
moving objects. summarized in the following diagram.
3.1.2Second law: The vector sum of theforces on an object is equal to
themass “m” of that object multiplied by theacceleration vector “a” of the object.3.1.3 Third law: When one body exerts a force on a second body, the second body
simultaneously exerts a force equal in magnitude and opposite in direction onthe first body.
Newton showed that these laws of motion, combined with his law of universal
gravitation explained Kepler’s laws of planetary motion.
Newton's laws are applied to objects which are idealised as single point masses in
the sense that the size and shape of the object's body are neglected to focus on
its motion more easily. This can be done when the object is small compared to
the distances involved in its analysis, or the deformation and rotation of the bodyare of no importance. In this way, even a planet can be idealised as a particle for
analysis of its orbital motion around a star.
Newton's laws hold only with respect to a certain set offrames of
reference calledNewtonian or inertial reference frames. Some authors interpret
125

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 126/422
Physics XI
EEE Consortium
the first law as defining what an inertial reference frame is; from this point of
view, the second law only holds when the observation is made from an inertial
reference frame, and therefore the first law cannot be proved as a special case of
the second. Other authors do treat the first law as a corollary of the second.In the given interpretation, mass, acceleration,momentum, and (most
importantly)force are assumed to be externally defined quantities. This is the
most common, but not the only interpretation of the way one can consider the
laws to be a definition of these quantities.
Whatever draws or presses another is as much drawn or pressed by that other. If
you press a stone with your finger, the finger is also pressed by the stone. If a
horse draws a stone tied to a rope, the horse (if I may so say) will be equallydrawn back towards the stone: for the distended rope, by the same endeavour to
relax or unbend itself, will draw the horse as much towards the stone, as it does
the stone towards the horse, and will obstruct the progress of the one as much
as it advances that of the other. If a body impinges upon another, and by its force
changes the motion of the other, that body also (because of the equality of the
mutual pressure) will undergo an equal change, in its own motion, toward the
contrary part. The changes made by these actions are equal, not in the velocities
but in the motions of the bodies; that is to say, if the bodies are not hindered byany other impediments. For, as the motions are equally changed, the changes of
the velocities made toward contrary parts are reciprocally proportional to the
bodies. This law takes place also in attractions.
5.1.4Examples of inertia of rest:
• If pulled quickly, a tablecloth can be removed from underneath of dishes. The
dishes have the tendency to remain still as long as the friction from the
movement of the tablecloth is not too great.
• If a stopped car is hit by a moving car from behind, the passengers inside mayexperience whiplash as a result of the body moving forward but the head lagging
behind. The head is experiencing inertia.
126

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 127/422
Physics XI
EEE Consortium
• When a car is abruptly accelerated, drivers and passengers may feel as though
their bodies are moving backward. In reality, inertia is making the body want to
stay in place as the car moves forward.
• If an index card is placed on top of a glass with a penny on top of it, the indexcard can be quickly removed while the penny falls straight into the glass, as the
penny is demonstrating inertia.
• If the wind is blowing, a tree’s branches are moving. A piece of ripe fruit that falls
from the tree will fall in the direction the wind is moving because of inertia.
5.1.5Examples of inertia of motion along a straight line:
• One's body moves to the side when a car makes a sharp turn.
• Tightening of seat belts in a car when it stops quickly.• A ball rolling down a hill will continue to roll unless friction or another force
stops it.
• Men in space find it more difficult to stop moving because of a lack of gravity
acting against them.
• If one drove a car directly into a brick wall, the car would stop because of the
force exerted upon it by the wall. However, the driver requires a force to stop his
body from moving, such as a seatbelt, otherwise inertia will cause his body to
continue moving at the original speed until his body is acted upon by some force.• If you jump from a car of bus that is moving, your body is still moving in the
direction of the vehicle. When your feet hit the ground, the grounds act on your
feet and they stop moving. You will fall because the upper part of your body
didn’t stop and you will fall in the direction you were moving.
5.2Momentum:
Inclassical mechanics linear or translational momentum is the product of
themass and velocity of an object. For example, a heavy truck moving quickly
has a large momentum—it takes a large or prolonged force to get the truck up to
this speed, and it takes a large or prolonged force to bring it to a stop afterwards.
127

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 128/422
Physics XI
EEE Consortium
If the truck were lighter, or moving more slowly, then it would have less
momentum.
Like velocity, linear momentum is a vector quantity, possessing a direction as wellas a magnitude
Linear momentum is also aconserved quantity, meaning that if aclosed
system is not affected by external forces, its total linear momentum cannot
change. In classical mechanics,conservation of linear momentum is implied
byNewton's laws; but it also holds inspecial relativity (with a modified formula)
and, with appropriate definitions, a (generalized) linear momentum conservationlaw holds in electrodynamics,quantum mechanics,quantum field theory,
andgeneral relativity.
5.2.1 Impulse
Animpulse J occurs when a forceF acts over an interval of time ∆t, and it is
given by
Since force is the time derivative of momentum, it follows that
This relation between impulse and momentum is closer to Newton's wording of
the second law.
Impulse is a concept frequently used in the analysis of collisions and impacts.
128

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 129/422
Physics XI
EEE Consortium
5.2.2 Relation to force: The second law
If a forceF is applied to a particle for a time interval ∆t, the momentum of the
particle changes by an amount
In differential form, this givesNewton’s second law of motion: the rate of change
of the momentum of a particle is equal to the forceF acting on it:
If the force depends on time, the change in momentum (orimpulse) betweentimest1 andt2 is
The second law only applies to a particle that does not exchange matter with its
surroundings, and so it is equivalent to write
so the force is equal to mass timesacceleration.
5.2.2.1Limitation of the second law:
The net force should be defined as the rate of change ofmomentum; this
becomes
F = ma
129

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 130/422
Physics XI
EEE Consortium
only if the mass is constant. Since themass changes as the speed approaches
thespeed of light, F=ma is seen to be strictly a non-relativistic relationship which
applies to the acceleration of constant mass objects. Despite these limitations, it
is extremely useful for the prediction of motion under these constraints.
5.2.3Law of conservation of linear momentum:
One of the most powerful laws in physics is the law ofmomentum conservation.
The law of momentum conservation can be stated as follows.
For a collision occurring between object 1 and object 2 in anisolated system, thetotal momentum of the two objects before the collision is equal to the total
momentum of the two objects after the collision. That is, the momentum lost by
object 1 is equal to the momentum gained by object 2.
The above statement tells us that the total momentum of a collection of objects
(asystem) isconserved - that is, the total amount of momentum is a constant or
unchanging value. This law of momentum conservation will be the focus of the
remainder of Lesson 2. To understand the basis of momentum conservation, let's
begin with a short logical proof.
5.2.4 The Logic behind Momentum Conservation
Consider a collision between two objects - object 1 and object 2. For such a
collision, the forces acting between the two objects are equal in magnitude and
opposite in direction (Newton's third law). This statement can be expressed in
equation form as follows.
F1 =-F2 The forces are equal in magnitude and opposite in direction
The forces act between the two objects for a given amount of time. In some cases,
the time is long; in other cases the time is short. Regardless of how long the time
130

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 131/422
Physics XI
EEE Consortium
is, it can be said that the time that the force acts upon object 1 is equal to the
time that the force acts upon object 2. This is merely logical. Forces result from
interactions (or contact) between two objects. If object 1 contacts object 2 for
0.050 seconds, then object 2 must be contacting object 1 for the same amount oftime (0.050 seconds). As an equation, this can be stated as
t1 = t2
Since the forces between the two objects are equal in magnitude and opposite in
direction, and since the times for which these forces act are equal in magnitude,
it follows that theimpulses experienced by the two objects are also equal in
magnitude and opposite in direction. As an equation, this can be stated as
F1 x t = -F2 x t
The impulse before impact is equal to the impulse after impact but in the
opposite direction.
Butthe impulse experienced by an object is equal to the change in momentum of
that object (the impulse-momentum change theorem). Thus, since each object
experiences equal and opposite impulses, it follows logically that they must also
experience equal and opposite momentum changes. As an equation, this can bestated as
M1 x v ∆ 1 = M2 x v ∆ 2
The change in momentum is equal in magnitude and opposite in direction
Example 5.1
Consider a collision in football between a fullback and a linebacker during agoal-line stand. The fullback plunges across the goal line and collides in midair with
the linebacker. The linebacker and fullback hold each other and travel together
after the collision. The fullback possesses a momentum of 100 kgm/s, East
before the collision and the linebacker possesses a momentum of 120 kg*m/s,
131

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 132/422
Physics XI
EEE Consortium
West before the collision. The total momentum of the system before the collision
is 20 kg*m/s, West. Therefore, the total momentum of the system after the
collision must also be 20 kg*m/s, West. The fullback and the linebacker move
together as a single unit after the collision with a combined momentum of 20kg*m/s. Momentum is conserved in the collision. A vector diagram can be used
to represent this principle of momentum conservation; such a diagram uses an
arrow to represent the magnitude and direction of the momentum vector for the
individual objects before the collision and the combined momentum after the
collision.
Example 5.2
Now suppose that a medicine ball is thrown to a clown who is at rest upon the
ice; the clown catches the medicine ball and glides together with the ball across
the ice. The momentum of the medicine ball is 80 kg*m/s before the collision.
The momentum of the clown is 0 m/s before the collision. The total momentum
of the system before the collision is 80 kg*m/s. Therefore, the total momentum of
the system after the collision must also be 80 kg*m/s. The clown and the
medicine ball move together as a single unit after the collision with a combinedmomentum of 80 kgm/s. Momentum is conserved in the collision.
132

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 133/422
Physics XI
EEE Consortium
Momentum is conserved for any interaction between two objects occurring in an
isolated system. This conservation of momentum can be observed by a total
system momentum analysis or by a momentum change analysis. Useful means of
representing such analyses include a momentum table and a vector diagram.
Later in Lesson, we will use the momentum conservation principle to solveproblems in which the after-collision velocity of objects is predicted.
Example 5.3
When fighting fires, a fire fighter must use great caution to hold a hose that
emits large amounts of water at high speeds. Why would such a task be difficult?
Solution: The hose is pushing lots of water (large mass) forward at a high speed. This means the water has a large forward momentum. In turn, the hose must
have an equally large backwards momentum, making it difficult for the fire
fighters to manage.
Example 5.4
A large truck and a Volkswagen have a head-on collision.
a. Which vehicle experiences the greatest force of impact?
Ans: Both experience the same force of impact
b. Which vehicle experiences the greatest impulse?
Ans: Both experience the same impulse.
c. Which vehicle experiences the greatest momentum change?133

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 134/422
Physics XI
EEE Consortium
Ans: Both experience the same change in momentum.
d. Which vehicle experiences the greatest acceleration?
Ans: Due to smaller mass the Volkswagen experience larger force.
Example 5.5
The velocity of a freely falling body increases continuously. Is it a violation of the
law of conservation of energy? Explain
Solution:
No. The velocity of the freely falling body increases towards the earth, conversely
the velocity of the earth increases towards the body.
Example 5.6
Explain recoil of a gun on firing.
Ans: p ∆ gun = - p ∆ bullet
Action by gun on bullet. Reaction by bullet on the gun.
5.3 Equilibrium of concurrent forces
Equilibrium means "no acceleration".
Since a force is a "push" or "pull" exerted on a body, equilibrium means that
the total of all forces acting on a body must be zero.
According to Newton's second law,
F = m x a
Ifa = 0 thenF must be zero.
Concurrent means that the forces intersect through a single point.
If forces are concurrent, we can add them together as vectors to get the
resultant.If the body is not accelerating, it must be in equilibrium, so that means the
resultant is zero.
For concurrent forces, the body is a point.
So for concurrent forces in equilibrium, the forces should all add up to give zero.
134

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 135/422
Physics XI
EEE Consortium
5.3.1 The Free Body Diagram (FBD)
The Free Body Diagram is a strict diagram that isolates the body for study.
SeeFree Body Diagrams for more information. The idea of the FBD is to focus on
one particular part or group of parts (called the body) and replace every external
member with the force they would apply.
1. Isolate the body. (An outline is best because we are supposed to forget about
the inside of the body).
2. Locate border crossings. Identify the contact points where forces are crossing
the boundary. Gravity acts through centre.
3. Line of Action. Some types of connections have a known direction. E.g.
Cables have force running through the centreline.
4. "To the Body" Since Newton's 3rd law has every action with an opposite
reaction, we must eliminate half the forces. Identify those forces that are applied
"to the body", and eliminate those done "by the body".
If the FBD were drawn to scale, the body might be length (mm, m etc) and the
forces might be another scale (N, kN etc).
5.3.2 The Force Polygon (FP)
The force polygon must be drawn strictly to scale, and everything is a Force. The
only information coming from the FBD is;
• Force magnitudes
• Force Angles
Warning! Do not attempt to bring any FBD Lengths into the FP. There are no
metres in the Force Polygon.
Example Diagrams
These cranes are not accelerating, so they are in equilibrium. Therefore all the
forceson any body should add up to zero. The body is actually the connection
135

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 136/422
Physics XI
EEE Consortium
point which is probably a lifting eye of a hook. The FBD shows as much as we
know from the Space diagram - in this case angles are known but only one
magnitude. The force polygon should form a closed loop (since resultant = 0), so
this defines the lengths (and hence the magnitudes) of F1 and F2.
CAD programs are very helpful when working with force polygons.
The Equilibrium Equations
Equilibrium simply says the resultant is zero. Mathematically, this can be stated
that the Fx and Fy components are zero.
So, for concurrent forces in 2 dimensions (planar), equilibrium means that...
Very often we know the angle of the forces but not the magnitudes. When solving
mathematically, this means we will need to use simultaneous equations.
5.4Friction
Friction is theforce resisting the relative motion of solid surfaces, fluid layers,
and material elements sliding against each other.
5.4.1 Static friction
Static friction is friction between two or more solid objects that are not moving
relative to each other. For example, static friction can prevent an object from
136

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 137/422
Physics XI
EEE Consortium
sliding down a sloped surface. The coefficient of static friction, typically denoted
asμs, is usually higher than the coefficient of kinetic friction.
5.4.2Kinetic friction
Kinetic (or dynamic) friction occurs when two objects are moving relative to each
other and rub together (like a sled on the ground). The coefficient of kinetic
friction is typically denoted asμk, and is usually less than the coefficient of static
friction for the same materials.
5.4.3 Limiting friction
The maximum value of static friction, when motion is impending, is sometimes
referred to as limiting friction. It is also known as traction.
5.4.4Laws of friction
Law 1 : When two bodies are in contact the direction of the forces of Friction onone of them at it's point of contact, is opposite to the direction in which the point
of contact tends to move or moves relative to the other.
Law 2 : If the bodies are in equilibrium, the force of Friction is just sufficient to
prevent motion and may therefore be determined by applying the conditions of
equilibrium of all the forces acting on the body.
The amount of Friction that can be exerted between two surfaces is limited and if
the forces acting on the body are made sufficiently great, motion will occur.Hence, we definelimiting friction as the friction which is exerted when
equilibrium is on the point of being broken by one body sliding on another. The
magnitude of limiting friction is given by the following three laws.
137

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 138/422
Physics XI
EEE Consortium
Law 3: The ratio of the limiting friction to the Normal reaction between two
surfaces depends on the substances of which the surfaces are composed, and
not on the magnitude of the Normal reaction.
This ratio is usually denoted by . Thus if the Normal reaction is R, the limiting friction is .
For given materials polished to the same standard is found to be constant and
independent of R.
is calledThe Coefficient of friction
Law 4 : The amount of limiting friction is independent of the area of contact
between the two surfaces and the shape of the surfaces, provided that the
Normal reaction is unaltered.
5.4.5 Angle of friction
For the maximum angle of static friction between granular materials,
For certain applications it is more useful to define static friction in terms of the
maximum angle before which one of the items will begin sliding. This is calledtheangle of friction or friction angle. It is defined as:
whereθ is the anglefrom horizontal andµs is the static coefficient of friction
between the objects. This formula can also be used to calculateµs from empirical
measurements of the friction angle.
138

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 139/422
Physics XI
EEE Consortium
5.4.6 Lubricated friction:
Lubricated friction is a case of fluid friction where a fluid separates two solid
surfaces. Lubrication is a technique employed to reduce wear of one or both
surfaces in close proximity moving relative to each another by interposing a
substance called a lubricant between the surfaces.In most cases the applied load is carried by pressure generated within the fluid
due to the frictional viscous resistance to motion of the lubricating fluid between
the surfaces. Adequate lubrication allows smooth continuous operation of
equipment, with only mild wear, and without excessive stresses or seizures at
bearings. When lubrication breaks down, metal or other components can rub
destructively over each other, causing heat and possibly damage or failure.
5.4.7Rolling friction
Rolling resistance, sometimes calledrolling friction orrolling drag, is the
force resisting themotion when a body (such as a ball,tire, or wheel) rolls on a
surface. It is mainly caused bynon-elastic effects; that is, not all the energy
needed for deformation (or movement) of the wheel, roadbed, etc. is recovered
when the pressure is removed. Two forms of this are hysteresis losses, and
permanent(plastic) deformation of the object or the surface (e.g. soil). Another
cause of rolling resistance lies in theslippage between the wheel and the surface, which dissipates energy. Note that only the last of these effects involvesfriction,
therefore the name "rolling friction" is to an extent a misnomer.
139

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 140/422
Physics XI
EEE Consortium
In analogy withsliding friction, rolling resistance is often expressed as a
coefficient times the normal force. This coefficient of rolling resistance is
generally much smaller than the coefficient of sliding friction.
5.5Uniform Circular Motion
5.5.1Centripetal Acceleration
Before discussing the dynamics of uniform circular motion, we must explore its
kinematics. Because the direction of a particle moving in a circle changes at a
constant rate, it must experience uniform acceleration. But in what direction isthe particle accelerated? To find this direction, we need only look at the change
in velocity over a short period of time:
A particle in Uniform Circular Motion
The diagram above shows the velocity vector of a particle in uniform circular
motion at two instants of time. By vector addition we can see that the change in
velocity,∆v , points toward the center of the circle. Since acceleration is the
change in velocity over a given period of time, the consequent acceleration points
in the same direction. Thus we define centripetal acceleration as an acceleration
towards the center of a circular path. All objects in uniform circular motion must
experience some form of uniform centripetal acceleration. We find the magnitude of this acceleration by comparing ratios of velocity and
position around the circle. Since the particle is travelling in a circular path, the
ratio of the change in velocity to velocity will be the same as the ratio of the
change in position to position. Thus:
140

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 141/422
Physics XI
EEE Consortium
= =
Rearranging the equation,
= Thus,
ac = We now have a definition for both the magnitude and direction of centripetal
acceleration: it always points towards the center of the circle, and has a
magnitude ofv 2/r .
5.5.2Centripetal Force
Centripetal force is the force that causes centripetal acceleration. By using
Newton's Second Law in conjunction with the equation for centripetal
acceleration, we can easily generate an expression for centripetal force.
F c =ma =Remember also that force and acceleration will always point in the same
direction. Centripetal force therefore points toward the center of the circle.
There are many physical examples of centripetal force. In the case of a car
moving around a curve, the centripetal force is provided by thestatic frictional
force of the tires of the car on the road. Even though the car is moving, the force
is actually perpendicular to its motion, and is a static frictional force. In the case
of an airplane turning in the air, the centripetal force is given by the lift provided by its banked wings. Finally, in the case of a planet rotating around the sun, the
centripetal force is given by the gravitational attraction between the two bodies.
With the knowledge of physical forces such as tension, gravity and friction,
centripetal force becomes merely an extension of Newton's Laws. It is special,141

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 142/422
Physics XI
EEE Consortium
however, because it is uniquely defined by the velocity and radius of the uniform
circular motion. All of Newton's Laws still apply, free body diagrams are still a
valid method for solving problems, and forces can still be resolved into
components. Thus the most important thing to remember regarding uniformcircular motion is that it is merely a subset of the larger topic of dynamics.
Example 5.7
A 2 kg ball on a string is rotated about a circle of radius 10 m. The maximum
tension allowed in the string is 50 N. What is the maximum speed of the ball?
Solution: The centripetal force in this case is provided entirely by the tension in
the string. If the maximum value of the tension is 50 N, and the radius is set at
10 m we only need to plug these two values into the equation for centripetal
force:
T =F c = implies thatv =
thus
v = = 15.8 m/s
Example 5.8
During the course of a turn, an automobile doubles its speed. How much
additional frictional force must the tires provide if the car safely makes around
the curve?
Solution:SinceF c varies withv 2 , an increase in velocity by a factor of two must
be accompanied by an increase in centripetal force by a factor of four.
Example 5.9
142

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 143/422
Physics XI
EEE Consortium
A satellite is said to be in geosynchronous orbit if it rotates around the earth
once every day. For the earth, all satellites in geosynchronous orbit must rotate
at a distance of 4.23×107 meters from the earth's center. What is the magnitude
of the acceleration felt by a geosynchronous satellite?Solution:
The acceleration felt by any object in uniform circular motion is given bya = .
We are given the radius but must find the velocity of the satellite. We know that
in one day, or 86400 seconds, the satellite travels around the earth once. Thus:
v = =
== 3076 m/s
Thus
a = = = 0.224 m/s2
Example 5.10
The maximum lift provided by a 500 kg airplane is 10000 N. If the plane travels
at 100 m/s, what is its shortest possible turning radius?Solution: Again, we use the equationF c = . Rearranging, we find
thatr = . Plugging in the maximum value for the lift of the plane, we find
that
r min = = 500m
Example 5.11
A popular daredevil trick is to complete a vertical loop on a motorcycle. This trickis dangerous, however, because if the motorcycle does not travel with enough
speed, the rider falls off the track before reaching the top of the loop. What is the
minimum speed necessary for a rider to successfully go around a vertical loop of
10 meters?
143

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 144/422
Physics XI
EEE Consortium
Solution:
During the entire trip, the rider experiences two different forces: the normal force
from the track, and the gravitational force. At the top of the loop, both these
forces point down, or towards the center of the loop. Thus the combination ofthese forces provides the centripetal force at that point. At the minimum speed of
the motorcycle, however, he experiences no normal force. One can see this by
envisioning that if the rider had gone any slower, he would have fallen off the
track. Thus, at the minimum speed, all the centripetal force is provided by
gravity. Plugging into our equation for centripetal force, we see that
mg =
Rearranging the equation,v min = = = 9.9 m/s
Thus the rider must be traveling at least 9.9 m/s to make it around the loop.
5.5.3Cyclist Negotiating a Curved Level Surface
While negotiating a curved level surface, a cyclist has to lean inwards which give
the necessary centripetal force which prevents him from falling down. Diagram
shows a cyclist leaning at an angle θ with the vertical. N is the normal reaction
which is shown by:N = mg
Where m is the mass of the cyclist plus the bicycle. The tension of friction
between the road and the tyres is
F = μN = mg
The cyclist will skid if the centripetal force mv2/R exceeds the frictional tension F,
i.e. if144

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 145/422
Physics XI
EEE Consortium
Where R is the radius of the curved surface. Thus skidding occurs if
5.5.4Banking of Curves:
The large amount of friction between the tyres and the road would affect the
tyres. To minimize the wearing out of tyres the road bend is banked, i.e. the
outer part of the road is raised a little so that the road slopes towards the center
of the curved track. Take as a car of mass m is moving around a banked track ina circular path of radius R as shown in Fig. Let N1 and N2 be the reaction at each
tyre due to the road. Then the total reaction is N = N1 + N2 acting in the middle of
the car. Ifθ is the angle of the banking, the vertical component Ncosθ supports
the weight mg of the car while the horizontal component Nsinθ provides the
necessary centripetal force.
Thus,
and
Also F = μN Where F is the force of friction action acting radically inwards on the car. These
equations provide
and
145

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 146/422
Physics XI
EEE Consortium
The first equation calculate the proper banking angle for given v, R and μ, and
the second equation the maximum speed at which the car can successfully
negotiate the curve for given R, μ and θ.
For given θ and R, there is an optimum (best) speed for negotiating a bankedcurve at which there will be the least tear and wear, i.e. when friction is not
needed at all ( μ= 0). If μ= 0, this speed is : v = (Rg tanθ )1/2
The car will not skid if the angle of banking of the track satisfies the equation:
5.5.5Circular motion in a vertical plane
It is interesting to consider an object that is being swung round on a string in a
vertical circle.
Let the tension in the string be T1 at the bottom of the circle, T2 at the sides and
T3 at the top.
At the bottom of the circle:
T1 - mg = mv2/r so T1 = mv2/r + mg
At the sides of the circle:
T2 = mv2/r
At the top of the circle:
T3+ mg = mv2/r so T3 = mv2/r - mg
So, as the object goes round the circle the tension in the string varies being
greatest at the bottom of the circle and least at the top. Therefore if the string is
to break it will be at the bottom of the path where it has to not only support the
object but also pull it up out of it straight-line path.
An example of this would be an aircraft looping the loop or some of the funfair
rides already mentioned. The g force on the pilot would be greatest as they try
and pull out of the bottom of the loop, and this is the place they would
146

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 147/422
Physics XI
EEE Consortium
expect to black out if they are travelling round the loop at constant speed.
5.6Connected motion:
1. The two mass arem1 andm2 and the pulley system is arranged as in Figure
If m1<m2 then m1 gets accelerated upward and m2 gets accelerated downwards.
Since the string is taut T1 = T2 = T (say) and acceleration be a
Therefore,
T- m1g = m1a
147

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 148/422
Physics XI
EEE Consortium
And m2g –T = m2a
Hence a = (m2-m1)g/(m1+m2)
And tension T = 2m1m2/(m1+m2)
2.Consider two masses, m1 and m2, connected by a light inextensible string.
Suppose that the first mass slides over a smooth, frictionless, horizontal table,
whilst the second is suspended over the edge of the table by means of a light
frictionless pulley. See Figure. Since the pulley is light, we can neglect its
rotational inertia in our analysis. Moreover, no force is required to turn africtionless pulley, so we can assume that the tension of the string is the same
on either side of the pulley.
Let us apply Newton's second law of motion to each mass in turn. The first mass
is subject to a downward force m1g, due to gravity. However, this force is
completely cancelled out by the upward reaction force due to the table. The mass
m1 is also subject to a horizontal force , due to the tension in the string, which
causes it to moverightwards with acceleration
The second mass is subject to a downward force m2g, due to gravity, plus an
upward force due to the tension in the string. These forces cause the mass to
movedownwards with acceleration.
Now, the rightward acceleration of the first mass must match the downward
acceleration of the second, since the string which connects them is inextensible.
Thus, equating the previous two expressions, we obtain
148

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 149/422
Physics XI
EEE Consortium
Note that the acceleration of the two coupled masses isless than the full
acceleration due to gravity ‘g’, since the first mass contributes to the inertia of
the system, but does not contribute to the downward gravitational force which
sets the system in motion.
5.7Motion in an elevator:
1. No acceleration of elevator:
If the acceleration of the elevator is zero, then there are two possible scenarios;
the elevator can be at rest (stationary, zero velocity) or moving with a constant
speed (no acceleration if velocity does not change). In this case, the action and
reaction force pair between the person and the scale is just the weight. The
person pushes down on the scale with a force of
-W=-mg (negative direction)
and the scale pushes back up against the man with a Normal Force of
FN = +W = +mg.
Because the reading on the scale is the magnitude of the normal force, the scale
will read the true weight when the elevator is NOT accelerating.
149

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 150/422
Physics XI
EEE Consortium
2. Elevator speeding upwards:
In this case, the elevator and the person are starting from rest at a lower floor.
The elevator accelerates upward. The inertia of the person would prefer to staystationary, so the elevator floor and scale must push up on the person to
accelerate him upward long with the elevator. (The person doesn't sink into the
floor when the elevator accelerates up. The elevator and the scale and the person
all move together.)The scale therefore has to push upward with extra force on the
person to accelerate the person's mass upward. This results in a greater contact
force between the scale and the person. Therefore the Normal Force is larger, so
the reading on the scale is a number that is GREATER than the true weight.
Let's consider Newton's 2nd
Law (ΣF=ma) acting on the person. The overallacceleration of the person is upward (with the elevator). So ma is positive
(upward). The only external forces acting on the person are the force of gravity
acting down (-W=-mg) and the supporting Normal Force FN that the scale applies
upward on the person.
So ΣF = ma = -mg + FN .
We want to know FN because that is the number that we read off the scale. So
FN = mg + ma,
which is GREATER than the true weight.
3. Elevator slowing down upwards:
In this case, the elevator and the person are initially moving upward at a
constant speed and slowing down to rest at a higher floor. The acceleration of theelevator is downward (opposite to the upward motion, which causes a reduction
of the velocity). The inertia of the person would prefer to keep moving upward at
a constant speed, so the elevator floor and scale effectively drop out a little bit
from underneath the personas the elevator slows down. The person doesn't float
150

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 151/422
Physics XI
EEE Consortium
upward, because again the elevator and the person move together, but the
contact force between the person and the scale is reduced. The scale therefore
has to push upward with less force on the person to support the person's weight.
Therefore the Normal Force is smaller, so the reading on the scale is a numberthat is LESS than the true weight. Let's consider Newton's 2nd Law (ΣF=ma)
acting on the person. The overall acceleration of the person is downward (with
the elevator). So ma is negative (downward). The only external forces acting on
the person are the force of gravity acting down (-W=-mg) and the supporting
Normal Force FN that the scale supplies upward on the person.
So ΣF = -ma = -mg + FN
We want to know FN because that is the number that we read off the scale. Now
FN = mg – ma
which is LESS than the true weight.
3. Elevator slowing down downwards
In this case, the elevator and the person are initially moving downward at aconstant speed and then slow to rest at a lower floor. The elevator accelerates
upward (opposite direction to negative/downward velocity to reduce velocity
magnitude). The inertia of the person would prefer to keep moving downward at
the constant speed, so the elevator floor and scale must push up on the person
151

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 152/422
Physics XI
EEE Consortium
to accelerate him upward, slowing him down. (The person doesn't sink into the
floor here either. Elevator and scale and person move together.)The scale
therefore has to push upward with extra force on the person to accelerate the
person's mass upward. This results in a greater contact force between the scaleand the person. Therefore the Normal Force is larger, so the reading on the scale
is a number that is GREATER than the true weight. Let's consider Newton's 2nd
Law (ΣF=ma) acting on the person. The overall acceleration of the person is
upward (with the elevator). So ma is positive (upward). The only external forces
acting on the person are the force of gravity acting down (-W=-mg) and the
supporting Normal Force FN that the scale applies upward on the person.
So ΣF = ma = -mg + FN
(Note that this is the same equation as we got in case 2.) We want to know FN because that is the number that we read off the scale.
Now FN = mg + ma
which is GREATER than the true weight.
4. Elevator speeding up downwards
In this case, the elevator and the person are initially at rest at a higher floor. The
elevator then speeds up in the downward direction towards a lower floor. The
acceleration of elevator is negative/downward (increasing the velocity magnitude
in the downward direction). The inertia of the person would prefer to stay at rest,
so the elevator floor and scale effectively drop out a little bit from underneath the
person as the elevator accelerates down. The person doesn't float upward herealso, because again the elevator and the person move together, but the contact
force between the person and the scale is reduced. The scale therefore has to
push upward with less force on the person to support the person's weight.
Therefore the Normal Force is smaller, so the reading on the scale is a number
152

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 153/422
Physics XI
EEE Consortium
that is LESS than the true weight. Let's consider Newton's 2nd Law (ΣF=ma)
acting on the person. The overall acceleration of the person is downward (with
the elevator). So ma is negative (downward). The only external forces acting on
the person are the force of gravity acting down (-W=-mg) and the supportingNormal Force FN that the scale applies upward on the person.
So ΣF = -ma = -mg + FN
(Note that this is the same equation that we got for Case 3.) We want to know FN because that is the number that we read off the scale.
Now FN = mg – ma
which is LESS than the true weight.
5. The case of Free Fall ( a = - g )
If the elevator cable were to break, the whole elevator-scale-person system would
all begin to accelerate downward due to the force of gravity. All objects in freefall
accelerate downward with the same magnitude (acceleration due to gravity, g). The scale and the person are free falling together, so there is NO contact force
(Normal Force) between the scale and the person. (When they are both falling
together, there is no way that the scale can support any of the person's
weight.)Note that this is a special case of downward acceleration which we
discussed in Case 3 and Case 5.
Just as in Cases 3 and 5, the apparent weight (which is zero when a = -g) is less
than the true weight.
153

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 154/422
Physics XI
EEE Consortium
Exercise
Multiple Choice Questions
1. A small block B is placed on block A of mass 1 kg and length 20 cm. If initially
the block is placed at the right end of block A. A constant horizontal force of 10 N
is applied on the block A. All the surfaces are assumed frictionless. Find the timein which B separates from A.(a) 0.2 s(b) 0.32 s(c) 0.39 s
(d) 0.45 s
2. A block of massm is suspended with 2 ropes making angles α & β w.r.t to the
horizontal. Find the ratio of tension in the ropes.(a)sin α/sin β(b)tan α/tan β(c)cos α /cos β(d)cosβ/cos α
3. What must the acceleration of a lift going up be so that a block of mass "M"
exerts force 4Mg on the floor?(a) 4g(b) 2g(c) 3g(d) g
154

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 155/422
Physics XI
EEE Consortium
4. A lamp hangs vertically from a cord in an elevator which is descending with a
downward acceleration of a=2.0m/s2. The tension in the cord is T=10.0N. What is
the mass m of this lamp? (Take g = 10ms-2)
(a)1.25kg(b)4.00 kg(c)0.64kg(d)2kg
5. A toy train consists of three identical compartment A, B and C. It is being
pulled by a constant force F along C. The ratio of the tensions in the string
connecting AB and BC is(a) 2 : 1
(b) 1 : 3(c) 1 : 1(d) 1 : 2
Numericals
1.A mass of 5 kg is suspended by a rope of length 2 m from the ceiling. A forceof 45 N in the horizontal direction is applied at the midpoint R of the rope, asshown. What is the angle the rope makes with the vertical in equilibrium?(Take g = 10 ms-2). Neglect the mass of the rope.
2.A mass of 3 kg rests on a horizontal plane. The plane is gradually inclineduntil at an angle θ = 20° with the horizontal, the mass just begins to slide. What is the coefficient of static friction between the block and the surface?
3. A small block B is placed is placed on another block A of mass 7 kg andlength 15 cm. Initially the block B is near the right end of block A. A constanthorizontal force of 10 N is applied to the block A. All the surfaces are assumedfrictionless. Find the time elapsed before the block B separates from A.
4.A ball of mass 5 kg and a block of mass 12 kg are attached by a lightweightcord that passes over a frictionless pulley of negligible mass as shown in the
155

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 156/422
Physics XI
EEE Consortium
figure. The block lies on a frictionless incline of angle 30o. Find the magnitudeof the acceleration of the two objects and the tension in the cord. Take g = 10ms-2.
5.Two blocks of masses 5 kg and 7 kg are placed in contact with each other on africtionless horizontal surface. A constant horizontal force 20 N is applied tothe block of mass 7 kg.(a) Determine the magnitude of the acceleration of the two-block system.
(b) Determine the magnitude of the contact force between the two blocks.
6.A 75.0 kg man stands on a platform scale in an elevator. Starting from rest,the elevator ascends, attaining its maximum speed of 1.20 m/s in 1.0 s. Ittravels with this constant speed for the next 10.0 s. The elevator thenundergoes a uniform acceleration in the negativeydirection for 1.70 s andcomes to rest. What does the scale register -(a) before the elevator starts to move?(b) during the first 1.00 s?(c) while the elevator is traveling at constant speed?(d) during the time it is slowing down? Take g = 10 ms-2.
7.Two masses 5 kg and 7 kg situated on a frictionless, horizontal surface areconnected by a light string. A force of 50 N is exerted on one of the masses tothe right. Determine the acceleration of the system and the tensionTin thestring.
8.A block of mass m1 = 5kg on a frictionless horizontal table is connected to a block of mass m2 = 3kg by means of a very light pulley P1 and a light fixedpulley P2as shown in figure. Ifa1 anda2 are accelerations ofm1 andm2,
156

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 157/422
Physics XI
EEE Consortium
respectively. (a) Find the relation betweena1 anda2 (b) the tensions in thestrings (c) the accelerationsa1 and a2. Take g=10ms-2.
Answers to Practice Exercise
1. 480
2. µs = tan200= 0.36
3. t= 0.46s
4. T = 52.94N , a = 0.59s
5. a = 1.67ms-2, F1 = 8.33N, F2=11.67N
6. (a) 750N (b) 660N (c) 750N (d) 802.5N
7. a= 4.17ms-2, T=20.8N
8. (a) a1=2a2 (b) 2T1 = T2, T1 = 13N,
T2 = 26N (c) a1=2.6ms-2, a2 = 1.3ms-2
9. (a)M = 3msn!
(b) T1 = 3m"sn!, T2 = 6m"sn!
Answers to MCQ1. (a)
2. (d)
3. (c)
4. (a)
5.(d)
157

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 158/422
Physics XI
EEE Consortium
158

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 159/422
Physics XI
EEE Consortium
159

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 160/422
Physics XI
EEE Consortium
160

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 161/422
Physics XI
EEE Consortium
6.1 Introduction
In the previous chapter we discussed
Newton's laws and analyzed the
motion of objects. In this unit the
effect that work has upon the energy
of an object (or system of objects) will
be investigated; the everyday
definition of “work” and the one that
we use in physics are quite different
from each other. When most people
think about “work” they think of the
job that they have. A farmer
ploughing the field, a teacher
teaching a class, a student preparing
for the examination all are said to be
working. A person who can put in
long hours of work is said to have a
large stamina or energy. So energy is
the capacity to do work The word ‘power’ is used in everyday
life with different shades of meaning.
In karate or boxing we talk of
‘powerful’ punches. These are
delivered at a great speed. This shade
of meaning is close to the meaning of
the word ‘power usedin physics. We shall find that there is
at best a loose correlation between
the physical definitions and the
physiological pictures these terms
generate in our minds. The aim of
this chapter is to develop an
understanding of these three physical
quantities. Before we proceed to thistask, we need to develop a
mathematical prerequisite, namely
the scalar product of two vectors.
6.2 The Scalar Product
The scalar product of two vectors can be constructed by taking
thecomponent of one vector in the
direction of the other and multiplying
it times the magnitude of the other
vector. This can be expressed in the
form:
If the vectors are expressed in terms
of unit vectors i, j, and k along the x,
y, and z directions, the scalar product
can also be expressed in the form:
161

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 162/422
Physics XI
EEE Consortium
The scalar product is also called the"inner product" or the "dot product"
in some mathematics texts. A.A = A x. A x +A y.A y + Az.Az A2 = A x2 + A y2 + Az2
A.B = 0 if A & B are perpendicular
Properties of the Dot Product
(1)(Commutative Property) For any
two vectors A and B, A.B = B. A.
(2) (Scalar Multiplication
Property) For any two vectors A and B and any
real number c,(cA).B = A. (cB) =c (A.B)
(3) (Distributive Property) For any 3
vectors A, B and C, A.(B+C) = A.B + A.C.
6.3 Unit Vectors
It is convenient to use vectors of unit
length to specify the directions of vector quantities in the various
coordinate systems. InCartesian
coordinates it is typical to use i, j and
k to represent unit vectors in the x, y
and z directions respectively. A vector
which specifies a position in space
with respect to the origin of the
coordinate system could then be written.For unit vectors i, j, k we have
i.i = j.j =k.k = 0i.j = j.k =k.i = 0
Example 6.1 A body constrained to move along
the z-axis of a coordinate system is
subject to a constant forceF given
by F= (-i +2j +3k) N Where i, j, k are unit vectors along
the X, Y and Z axes of the system
respectively? What is the work done
by this force in moving the body a
distance of 4 m along the z-axis?Solution:
Force exerted F= (-i +2j +3k) Nd= 4 k m
Work done = F. d= (-i +2j +3k). (4 K)
= 0 + 0 + 3x4= 12J
Hence 12 J work is done by the force
on the body.
Try this:
Find the angle between force F = (3i+
4j +5k) and displacement d = (5i + 4j
162

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 163/422
Physics XI
EEE Consortium
+3k) unit. Also find the projection of
F on d?
6.4 Work
When a force acts upon an object
to cause a displacement of the
object, it is said that work was
done upon the object. There are
three key ingredients to work - force
displacement and cause. There are
several good examples of work thatcan be observed in everyday life - a
horse pulling a plough through the
field, a man pushing a grocery cart
down the aisle of a grocery store.
6.4.1 Work Equation
Mathematically, work can be
expressed by the following equation. W = F d cos Θ
whereF is the force,d is the
displacement, and the angle (theta)
is defined as the angle between the
force and the displacement vector.
6.4.2 Positive Negative & Zero
work
Case A: A force acts rightward upon
an object as it is displaced rightward.
In such an instance, the force vector
and the displacement vector are inthe same direction. The angle
between F and d is 0 degrees and
cos0 = +1
Examples of positive work:
(i) When a body falls freely undergravity, force of gravity and
displacement are in the same
direction and the work done by force
of gravity is positive. (ii) When a spring is stretched the
work done by the stretching force is
positive.
Case B: A force acts leftward upon an
object that is displaced rightward. In
such an instance, the force vector
and the displacement vector are in
the opposite direction. Thus, the
angle between F and d is 180 degrees
and cos 180 is –1.
Examples of negative work
(i) A car skidding to a stop on a
roadway surface or a baseball runner
sliding to a stop on the infield dirt. In
such instances, the force acts in the163

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 164/422
Physics XI
EEE Consortium
direction opposite the objects motion
in order to slow it down. The force
doesn't cause the displacement but
ratherhindersit. These situations involve what is
commonly callednegative work.
Case C:(i) A force acts upward on an
object as it is displaced rightward. In
such an instance, the force vector
and the displacement vector are at
right angles to each other. Thus, theangle between F and d is 90 degrees.
Then the work one is zero as cos900 =
0(ii)When the force applied or the
displacement or both are zero
Examples of Zero work
Waiter who carried a tray full of
meals above his head by one arm
straight across the room at constant
speed. The force supplied by the
waiter on the tray is an upward force
and the displacement of the tray is a
horizontal displacement. As such,
the angle between the force and the
displacement is 90 degrees. If the
work done by the waiter on the tray
were to be calculated, then the
results would be zero.(ii) When we push hard against a
wall, the force we exert on the wall
does no work, because s = 0.
However, in this process, our muscles
are contracting and relaxing
alternately and internal energy isused. That is why we get tired.
Example 6.2
The sign of work done by a force on a body is important to understand.
State carefully if the following
quantities are positive or negative?a) Work done by a man in lifting a
bucket out of a well by means of a
rope tied to the bucket.(b) Work done by gravitational force
in the above case,(c) Work done by friction on a body
sliding down an inclined plane,(d) Work done by an applied force on
a body moving on a rough horizontal
plane with uniform velocity,(e) Work done by the resistive force of
air on a vibrating pendulum in
bringing it to rest.
Try these:
A body of mass 2 kg initially at rest
moves under the action of an applied
horizontal force of 7 N on a table with
164

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 165/422
Physics XI
EEE Consortium
coefficient of kinetic friction = 0.1
Compute the(a) Work done by applied force
in 10 s(b) Work done by friction in 10 s(c) Work done by the net force on the
body in 10 s,(d) Change in kinetic energy of the
body in 10 s and interpret your
results.
6.4.3 Units of Work
Jouleis the SI unit of work.1 Joule = 1 newton x 1 meter = 1Nm
Dimension formula for work:
[M1 L2 T-2]C.G.Sunit of work iserg.
1 erg = 1 dyne-cm Joule: Work done is 1 joule if a force
of 1N displaces a body through a
distance of 1 m along the direction of
force.1 J = (1N)(1 m) = 1 kg m2s-2
Erg: Work done is 1 erg if a force of 1
dyne displaces a body through a
distance of 1 cm along the direction
of force.1 erg = (1 dyne) (1 cm) = 1 g cm2s-2
Try This:
A man pushes a roller with a force of
50 N through a distance of 20 m.
What is the work done by him if the
handle of the roller is inclined at anangle of 600 with the ground? (Ans.
500J)
6.4.4 Conservative and Non-
Conservative Forces
The work a conservative force does on
an object in moving it from one point
to another is path independent - itdepends only on the end points of
motion Eg: Force of gravity and the
spring force. The total work done by a conservative
force on a particle is zero when it
moves round any closed path and
returns to the initial positionFor non-conservative force the work
done in moving from one point to
another depends on path taken.Eg: Friction and air resistance
Fig 6.1 (a)
6.5 Work done by Constant Force
165

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 166/422
Physics XI
EEE Consortium
(Graphical Method)
Determine the work done by a
constant force by interpreting a force
–displacement graph. As work is the product of force and
distance, it can be represented as the
area under a graph of force as a
function of distance. In the below
graph the shaded region represents
the work done on an object that
undergoes a constant force.Fig 6.2
Thus, the work done (area of theshaded region) can be calculated by
multiplying distance (base) by force
(height).
6.6 Work Done by a Variable Force
Fig 6.3
Consider a body being moved, along
an arbitrary path, by a force which
continuously changes in magnitude
as well as direction. We first consider a force, acting on a
body that varies in magnitude only.
Assume that the magnitude of force
is a function of position ‘x’ that is
F(x), acting in the positive X
direction. We should like to find out
the work done, by F in moving a body
from x1 to x2. Here W is given by W =
The physical significance of definite
integral is area under the curve.Hence, W is nothing but Area under
the curve F(x) between the lines x =
x1 and x = x2 as shown in figure given
below.Now, consider that the force F
changes its magnitude as well as
direction from point to point. The
work done by the variable force F on
the body for two closer points on the
curve. If the displacement ∆x is
small, we can take the force F(x) as
approximately constant and the work
done is∆W =F(x).∆x
Adding successive rectangular areas
in Fig 6.3 we get the total work done
as
166

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 167/422
Physics XI
EEE Consortium
W=∑ x i
xf
F ( x ) . Δ x
where the summation is from the
initial position xi to the final position xfIf the displacements are allowed to
approach zero, then the number of
terms in the sum increases without
limit, but the sum approaches a
definite value equal to the area under
the curve in Fig. Then the work done
is
W = lim∆x→0 ∑ x i
xf
F ( x ) . Δ x
= ∫ xi
x f
f ( x ) dx
Where ‘lim’ stands for the limit of the
sum when ∆x tends to zero. Thus, for
a varying force the work done can beexpressed as a definite integral of
force over displacement.
6.7 Energy
A body which has the capacity to do
work is said to possess energy.For example, water in a reservoir is
said to possess energy as it could be
used to drive a turbine lower down
the valley. There are many forms of
energy e.g. electrical, chemical heat,
nuclear, mechanical etc.
The SI units are the same as those
for Work, Joules J.In this module only purely
mechanical energy will be considered. This may be of two
kinds,potential andkinetic.
6.7.1 Potential Energy
There are different forms of potential
energy Two examples are :1. Gravitational Potential Energy
It may be described as energy due to
position relative to a standard
position (normally chosen to be the
earth's surface.) The potential energy of a body may be
defined as the amount of work it
would do if it were to move from itscurrent position to the standard
position.
Eg: A pile driver raised ready to fall
on to its target possesses
gravitational potential energy.
Fig 6.4
167

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 168/422
Physics XI
EEE Consortium
A body is at rest on the earth's
surface. It is then raised a vertical
distance h above the surface. The
work required to do this is the forcerequired times the distance h.Since the force required is its weight,
and weight, W = mg, then the work
required is mgh. The body now possesses this amount
of energy - stored as potential energy
- it has the capacity to do this
amount of work, and would do so ifallowed to fall to earth.Potential energy is thus given by:
Potential Energy = mgh
where h is the height above the
earth's surface.Gravitational potential energy of an
object, as a function of the height h,
is denoted by V(h) and it is thenegative of work done by the
gravitational force in raising the
object to that height. V(h) = mgh
If h is taken as a variable, it is easily
seen that the gravitational force F
equals the negative of the derivative
of V(h) with respect to h. Thus,F = -dV(h)/dh = -mg The negative sign indicates that the
Gravitational force is downward.Physically, the notion of potential
energy is applicable only to the class
of forces where work done against the
force gets ‘stored up’ as energy. When external constraints are
removed, it manifests itself as kineticenergy. Mathematically,Potential energy V(x) is defined if the
force F(x) can be written asF(x) = - dV/dx
The dimensions of potential energy
are [ML2 T –2] and the unit is joule (J),
the same as kinetic energy or work.
To reiterate, the change in potential
energy, for a conservative force, ∆V is
equal to the negative of the work
done by the force∆V = − F(x)∆x
2. Elastic Potential Energy
Fig 6.5
Elastic potential energy is the
potential energy observed due to
stretching or compression by an
external force to a given elastic
object.Formula for elastic potential
energy
168

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 169/422
Physics XI
EEE Consortium
Fig 6.6
According to Hooke's law,Force given to stretch the spring is
directly proportional to its
displacement. It is given by
Where k is the spring constant, and x
is the amount by which the spring isstretched (x > 0) or compressed (x <
0). When a moving object runs into a
relaxed spring it will slow down, come
to rest momentarily, before
accelerating in a direction opposite to
its original direction. While the object
is slowing down it will compress the
spring. As the spring is compressedthe kinetic energy of the block is
gradually transferred to the spring
where it is stored as potential energy. The potential energy of the spring in
its relaxed position is defined to be
zero. The potential energy of the
spring in any other state can be
obtained from Hooke's law
TheElastic Potential Energyfor the
stretched spring is given by
where P.E is the elastic potential
energy.
Elastic Potential energy formula isused for the problems where
displacement, elasticity or elastic
force are mentioned. It is expressed
in Joule.
Example 6.3
The vertical spring is attached to the
load of mass 5 kg and is compressed by 8 m. Calculate the Force constant
of the spring.Solution: Mass m = 5kg,Distance x = 8 cmForce is given by F = ma = 5 kg × 9.8 m/s2
= 49 NForce in the stretched spring is given
by : F=kxForce Constant k= F/x = 49N/8m
= 6.125 N/m.
Try this
When a 4 kg mass is hung vertically
on a certain light spring that obeys
Hooke's law, the spring stretches
2.5cm. If the 4 kg mass is removed,(a) how far will the spring stretch if a
1.5 kg mass is hung on it, and
(b) how much work must an external
169

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 170/422
Physics XI
EEE Consortium
agent do to stretch the same spring 4
cm from its un-stretched position?
HOTS Question A 1 kg block situated on a rough
incline is connected to a spring of
spring constant 100 N m –1 as shown
in Fig. The block is released from rest
with the spring in the un-stretched
position. The block moves 10 cm
down the incline before coming to
rest. Find the coefficient of friction between the block and the incline.
Assume that the spring has a
negligible mass and the pulley is
frictionless.
Fig 6.8
6.7.2 Kinetic Energy
Kinetic energy may be described as
energy due to motion.
Fig 6.7
The energy possessed by an object by
virtue of its motion is called kinetic
energy
For example when a hammer is usedto knock in a nail, work is done on
the nail by the hammer and hence
the hammer must have possessed
energy.Only linear motion will be considered
here.
Formula for kinetic energy
Let a body of mass m moving with
speed v be brought to rest with
uniform deceleration by a constant
force F over a distance s.Using Equation : v2 = u2 +2as We get 0 = u2+ 2as
s = v2/2a And work done is given by
Work done = Force x Displacement = F x s =F x (v2/2a) The force is F = ma so Work done = max v2/2a
= ½ mv2
Thus the kinetic energy is given by
6.7.3 Kinetic Energy and Work
Done (Work-Energy Theorem)
When a body with mass m has its
speed increased from u to v in a
distance s by a constant
170

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 171/422
Physics XI
EEE Consortium
force F which produces an
acceleration a, then from Equation of
motion we know
v2
= u2
+2as v2-u2 = 2asMultiplying by ½ ½ v2 -½ u2 = asmultiplying this by ‘m’ gives an
expression of the increase in kinetic
energy (the difference in kinetic
energy at the end and the start)
Thus since F = ma
but also we know
So the relationship between kinetic
energy can be summed up as Work done by forces acting on a
body = change of kinetic energy in
the body.
W = K f- Ki = ∆K
This is known as the work-energy
theorem.
6.7.4 Work – Energy Theorem for a
Variable Force (Calculus Method)
So far we have looked at the work
done by a constant force. In the
physical world, however, this often is
not the case. Consider a force acting
on an object over a certain distance
that varies according to the
displacement of the object. Let us call
this force F(x), as it is a function of x. Though this force is variable, we can
break the interval over which it acts
into very small intervals, in which
the force can be approximated by a
constant force. Let us break the force
up into N intervals, each with
length dx. Also let the force in each of
those intervals be denoted by F1, F2…FN. Thus the total work
done by the force is given by: W = F1 dx + F2 dx + F3 dx + ……
+ FNdx
Thus W = Fn dx
This sum is merely an approximationof the total work. Its degree of
accuracy depends on how small the
intervals dxare. The smaller they
are, the more divisions ofF arise,
and the more accurate our
calculation becomes. Thus to find an
exact value, we find the limit of our
sum as dx approaches zero. Clearlythis sum becomes an integral, as this
is one of the most common limits
seen in calculus.If the particle travels from xo to
xf then:171

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 172/422
Physics XI
EEE Consortium
Fn dx = F(x)dx
Thus W = ∫ xi
x f
F ( x ) dx
We have generated an integral
equation that specifies the work done
over a specific distance by a position
dependent force. It must be noted
that this equation only holds in the
one dimensional case. In other
words, this equation can only be
used when the force is always parallel
or anti-parallel to the displacement of
the particle. The equation we derived
for work done by a variable force, we
can use it to yield the work-energy
theorem.Fnet= ma = m(dv/dt)
= m (dv/dx) x (dx/dt)= mv (dv/dx)
Now we plug in our expression for
force into our work equation:
Wnet = Fnetdx
= mv (dv/dx) dx = mvdv
Integrating from vo to vf
Wnet = mv dv
= ½ mvf2 – ½ mvo2
This result is precisely the Work
-Energy theorem. Since we have
proven it with calculus, this theoremholds for constant and non-constant
forces alike.Example 6.4
A car of mass 1000 kg travelling at
30m/s has its speed reduced to
10m/s by a constant breaking force
over a distance of 75m.Find:
(a)The cars initial kinetic energy(b)The final kinetic energy(c)The breaking force
Solution:
a) Initial Kinetic Energy = ½ mv2
= 500x 302 =450000J = 450 kJ b) Final Kinetic Energy
= ½ mv2= 50 kJc) Change in kinetic energy
= 450 - 50 = 400 kJ Work done = change in kinetic energySo F x s = 400 kJBreaking force x 75 = 400 kJBreaking force = 400000/75 = 5333N
Try this
A body of mass 0.5 kg travels in a
straight line with velocity v=ax3/2
where a=5m-1/2s-1. What is the work
172

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 173/422
Physics XI
EEE Consortium
done by the net force during its
displacement from x = 0 to x = 2 m?
6.8 Law of Conservation of
Mechanical Energy
The total amount of mechanical
energy, in a closed system in the
absence of dissipative forces (e.g.
friction, air resistance), remains
constant.For problems involving only
conservative forces, we can now quite
easily derive conservation of
mechanical energy. As we already know ∆U = - W
∆K = W
Together this says that∆K+ ∆U =0
This says that K+U doesn’t change,so it must be constant:
K + U = a constant
We callK+U the total mechanical
energy .
6.8.1 Examples of Conservation of
Energy
Energy conservation of a simplependulum
Fig 6.9
At the two extreme points A &B the
potential energy is maximum and the
kinetic energy is minimum. At the
mean postion the energy is
completely kinetic and the pendulam
possessess zero potential energy.In between te extreme ponts and the
mean position the energy is partly
kinetic and partly potential.The
graph for energy variation at different
points is shown below
Fig:6.10
Energy conservation of an
oscillating spring
Note that the amount of work done by the spring on the block after it
returns to its original position is zero.
173

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 174/422
Physics XI
EEE Consortium
Fig 6.11
The kinetic energy of the mass on the
spring increases as it approaches the
equilibrium position; and it decreases
as it moves away from theequilibrium position.Every time the spring is compressed
or stretched relative to its relaxed
position, there is an increase in the
elastic potential energy. The amount
of elastic potential energy depends on
the amount of stretch or compression
of the spring. The equation thatrelates the amount of elastic potential
energy to the amount of compression
or stretch (x) is PEspring = ½kx2
wherek is the spring constant(in N/m) andx is the distance that
the spring is stretched or compressed
relative to the relaxed, un-stretchedposition. A vibrating mass on a spring has the
greatest potential energy in the
maximum stretched or compressed
position. And it also has the smallest
potential energy at the mean position
when the velocity of vibrations is
maximum.
Fig6.12
Energy conservation in the case of
a freely falling body.
Let a body of mass 'm' placed at a
height 'h' above the ground, start
falling down from rest.In this case we have to show that the
total energy (potential energy +
kinetic energy) of the body at A, Band C remains constant, i.e, potential
energy is completely transformed into
kinetic energy.
Fig 6.13Body of mass 'm' placed at a height
'h'
174

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 175/422
Physics XI
EEE Consortium
At A,
Kinetic energy =1/2mv2 = 0[the
velocity is zero as the object isinitially at rest]
Total energy at A = PE + KE = mgh +
0 Total energy at A = mgh … (1)
At B,
Potential energy = mgy= mg (h -x) [Ht from ground is (h -
x)]Potential energy = mgh - mgx
Kinetic energy =1/2mv2
The body covers the distance x with a
velocity v. We make use of the third
equation of motion to obtain velocityof the body.
v2 - u2 = 2aS
Here, u = 0, a = g and s = x
v2 - 0 = 2gx v2 = 2gx
Kinetic energy = ½ x m x 2gx= mgx Total energy at B = PE + KE
= mgh –mgx + mgx
Total energy at B = mgh … (2)
At C,
Potential energy = m x g x 0 [h =
0]
Potential energy = 0
Kinetic energy =1/2mv2
The distance covered by the body is h
v2 - u2 = 2aS
Here, u = 0, a = g and S = h
Kinetic energy =1/2mv2
= 1/2 x m x 2gh = mgh Total energy at C = PE + KE
= 0 + mgh
Total energy at C = mgh … (3)
It is clear from equations 1, 2 and 3
that the total energy of the body
remains constant at every point.
Thus, we conclude that law of
conservation of energy holds good inthe case of a freely falling body.
Example 6.5
A bob of mass m is suspended by a
light string of length. It is imparted a175

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 176/422
Physics XI
EEE Consortium
horizontal velocity vo at the lowest
point A such that it completes a
semi-circular trajectory in the
vertical plane with the string becoming slack only on reaching the
topmost point, C. This is shown in
Fig. Obtain an expression for (i)vo ;
(ii) the speeds at points B and C; (iii)
the ratio of the kinetic
energies(KB/KC) at B and C. Comment
on the nature of the trajectory of the
bob after it reaches the point C
Fig 6.14
Solution:
(i) There are two external forces on
the bob: gravity and the tension (T )
in the string. The latter does no work
since the displacement of the bob is
always normal to the string. The
potential energy of the bob is thus
associated with the gravitational
force only. The total mechanicalenergy E of the system is conserved.
We take the potential energy of the
system to be zero at the lowest point
A.
Thus,at A :(i)E = 1/2mv02………………… (1) T A – mg = mv02/L … (2) (Newton’s
second law) where T A is the tension inthe string at A. At the highest point C, the string
slackens, as the tension in the string
(TC) becomes zero.E = 1/2mvc2+2mgL………. (3) mg = mvc2/L………………….(4)[Newton’s Second Law] where vC is
the speed at C.
From eqn (3) & (4); E = 5/2mgLEquating this to the energy at A5/2mgL = 1/2mv02
or v0 =√5 gL
(ii) It is clear from eqn (4) that
vc =√ gL
At B, the energy isE=1/2 mvB2 + mgL
Equating this to the energy at A andemploying the result from (i),
namely,v02 = 5gL1/2 mvB2 + mgL= 1/2mv02= 5/2 mgL
vB =√3 gL
(iii)The ratio of the kinetic energies at
B and C is: KB/Kc=[1/2mvB
2]/[1/2mvc2]=3:1
At point C, the string becomes slack
and the velocity of the bob is
horizontal and to the left. If the
connecting string is cut at this
instant, the bob will execute a
projectile motion with horizontal176

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 177/422
Physics XI
EEE Consortium
projection akin to a rock kicked
horizontally from the edge of a cliff.
Otherwise the bob will continue on
its circular path and complete therevolution.Example 6.6
A cyclist and his bicycle has a mass
of 80 kg. After 100m he reaches the
top of a hill, with slope 1 in 20
measured along the slope, at a speed
of 2 m/s. He then free wheels the
100m to the bottom of the hill wherehis speed has increased to 9m/s.How much energy has he lost on the
hill?Solution:
Fig 6.15
If the hill is 100m long then height is:h = 100x1/20 = 5mSo potential energy lost ismgh=80x9.81x5 =394JIncrease in kinetic energy is= ½ mv2 – 1/2mu2=1/2m (v2 –u2 )=40(81-4) =3080JBy the principle of conservation of
energyInitial energy = Final energy +loss of
energyLoss of energy =3924 – 3080 = 844 J
Try this
The potential energy function for a
particle executing linear simpleharmonic motion is given by
V(x) =kx2/2, where k is the force
constant of the oscillator. For k = 0.5
N m –1, the graph of V(x) versus x is
shown in Fig below. Show that a
particle of total energy 1 J moving
under this potential must ‘turn back’
when it reaches x = ± 2 m.
Fig 6.16
6.9 Power
Power is the rate at which work is
done. It is the work/time ratio.Mathematically, it is computed usingthe following equation.Power = Work / time = W / t The standard metric unit of power is
the Watt. As is implied by the
equation for power, a unit of power is
equivalent to a unit of work divided
by a unit of time. Thus,a Watt is
equivalent to a Joule/second.Kilowatt and megawatt are higher
units of power.1 kilowatt (KW) = 103 watts1 Megawatt (MW) = 106 watts
177

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 178/422
Physics XI
EEE Consortium
Another unit of power is horse power
(h.p) and 1 h.p. = 746 watts
6.9.1Power Based on Force andSpeed
We can calculate power based on
force and speed. Because work
equals force times distance, you can
write the equation for power the
following way, assuming that the
force acts along the direction of
travel:
where s is the distance travelled.
However, the object’s speed, v, is
just s divided by t, so the equation
breaks down to
Example 6.7
Calculate the power of an enginerequired to lift 105kg of coal per hour
from a mine 100m deep. Given
g=10m/s2.Solution:
Power = workdone/time The work done in lifting coal is
nothing but gravitational potential
energy.Power = mgh /tMass of coal = 105 kgg=10m/s2
h=100m Time = 1 hour=60x60 =3600s
P =105 x 10 x 100/3600 = 100x104/36 =27777.78 W
Try This :
A pump on the ground floor of a
building can pump up water to fill a
tank of volume 30 m3 in 15 min. If
the tank is 40 m above the ground,
and the efficiency of the pump is
30%, how much electric power is
consumed by the pump?
6.10 Different Forms Of Energy
Thermal energy
Thermal energy or heat energy
reflects the temperature difference
between two systems.Example: A cup of hot coffee has
thermal energy. You generate heat
and have thermal energy with respectto your environment.Nuclear energy
Nuclear energy is energy resulting
from changes in the atomic nuclei
orfrom nuclear reactions.
Example:Nuclear fission,nuclear
fusion, and nuclear decay are
examples of nuclear energy. An
atomic detonation or power from a
nuclear plant is specific example of
this type of energy.
178

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 179/422
Physics XI
EEE Consortium
Chemical energy
Chemical energy resultsfrom
chemical reactions between atoms or
molecules. There are different typesof chemical energy, such as
electrochemical energy and chemi-
luminescence.
Example: A good example of chemical
energy is an electrochemical cell or
battery.
Electromagnetic energyElectromagnetic energy is energy
from light or electromagnetic waves.Example: Any form of light
haselectromagnetic energy,including
parts of the spectrum we can't see.
Radio, gamma rays, x-rays,
microwaves, andultraviolet light are
some examples of electromagnetic
energy.
Fig
6.17
6.11 Collisions
Elastic Collision
An elastic collision is that in which
the momentum of the system as well
as kinetic energy of the system beforeand after collision is conserved.Inelastic Collision
An inelastic collision is that in which
the momentum of the system before
and after collision is conserved but
the kinetic energy before and after
collision is not conserved.
Elastic Collision in One Dimension
Consider two non-rotating spheres of
mass m1 and m2 moving initially
along the line joining their centers
with velocities u1and u2in the
same direction. Let u1is greater than
u2. They collide with one another
and after having an elastic collision
start moving with velocities v1and
v2 in the same directions on the
same line.
Fig 6.18
Momentum of the system before
collision = m1u1 + m2u2Momentum of the system after
collision = m1 v1 + m2 v2 According to the law of conservation
of momentum:
179

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 180/422
Physics XI
EEE Consortium
m1u1 + m2u2= m1 v1 + m2 v2m1 v1 – m1u1= m2u2 – m2 v2
m1(v1 – u1) = m2 (u2 – v2) ------- (1)
SimilarlyK.E of the
system before collision= ½ m1u12 + ½ m2u22
K.E of the system after collision= ½ m1 v12 + ½ m2 v22
Since the collision is elastic, so the
K.E of the system before and after
collision is conserved. Thus,½ m1 v12 + ½ m2 v22 = ½ m1u12 + ½ m2u22
½ (m1 v12 + m2 v22) = ½ (m1u12 + ½ m2u22) And
m1 v12- m1u12= m2u22-m2 v22
m1(v12-u12) = m2(u22-v22) ------- (2)Dividing equation (2) by equation (1)
v1+u1 = u2+v2From the above equation v1= u2+ v2-u1_________ (a) v2= v1+ u1-u2_________ (b)Putting the value of v2 in equation (1)m1 (v1-u1) =m2 (u2-v2)m1 (v1-u1) =m2u2-(v1+u1-u2)
m1(v1-u1) =m2u2-v1-u1+u2m1(v1-u1) = m2 2u2-v1-u1m1 v1-m1u1=2m2u2-m2 v1-m2u1m1 v1+m2 v1=m1u1-m2u1+2m2u2 v1(m1+m2)=(m1-m2)u1-2m2u2
In order to obtain v2 putting the value
of v1 from equation (a) in equation (i)m1(v1-u1) = m2(u2-v2)
m1(u2+v2-u1-u1)=m2(u2-v2)m1(u2+v2-2u1)=m2(u2-v2)m1u2+m1 v2-2m1u1=m2u2-m2 v2m1 v2+m2 v2=2m1u1+m2u2-m1u2 v2(m1+m2)= 2m1u1+(m2-m1)u2
Example 6.8
Two balls, each with mass 2 kg, and velocities of 2 m/s and 3 m/s collide
head on. Their final velocities are 2
m/s and 1 m/s, respectively. Is this
collision elastic or inelastic?Solution: To check for elasticity, we
need to calculate the kinetic energy
both before and after the collision.
Before the collision, the kineticenergy is 1/2(2)(2)2 + 1/2(2)(3)2 = 13 .
After, the kinetic energy is1/2(2)
(2)2 + 1/2(2) (1)2 = 5. Since the kinetic
energies are not equal, the collision is
inelastic.
Try this
Which of the following potentialenergy curves in Figure cannot
possibly describe the elastic collision
of two billiard balls? Here ‘r’ is the
distance between centres of the balls.
180

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 181/422
Physics XI
EEE Consortium
Fig 6.19
Collision in Two Dimensions A collision in two dimensions obeys
the same rules as a collision in one
dimension:
Total momentum in each direction is
always the same before and after the
collision Total kinetic energy is the same
before and after an elastic collisionConsider a particle A of mass m1moving with a velocity v1i in the X
direction. Let it collide with a particle
B of mass m2 at rest .After collisions
let A move with a velocity v1f in a
direction making an angle θ1 along
with the X axis and B with a velocity
v2f in a direction making an angle θ2 with the X axis.
Fig
6.20
Applying the law of conservation of
momentum in the X and Y direction
X directionm1 v1i= m1 v1fcos θ1 +m2 v2fcosθ2
Y direction0 = m2 v2fsin θ2 –m1 v1fsin θ1
Assuming the collision to be perfectly
elastic. Conservation of kineticenergy yields,1/2m1 v1i2 =1/2m1 v1f2+1/2m2 v2f2
i.e., m1 v1i2=m1 v1f2 +m2 v2f2
Coefficient of Restitution
When there is a head on Collision
between two bodies, the ratio of their
relative velocity after collision and
their relative velocity before collision
is called the Coefficient of restitution. Thus e =∣ v1- v2/u1-u2∣
181

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 182/422
Physics XI
EEE Consortium
For a perfectly elastic collision,the value of e is 1
If 0 < e < 1, then the collision is
inelastic.For a perfectly inelastic collision,e = 0.
If e > 1, then the collision is a super-
elastic collision. The comparison between Elastic and
inelastic collision is given below:
Example 6.9
A luxury car with a mass of 1800Kg
stopped at a traffic light is struck
from the rear by a car with a mass of
900kg. The two cars become
entangled as a result of the collision.
If the car was moving at 20m/s
before the collision, what will be the
velocity of the entangled mass after
the collision?
Solution:
Use the law of conservation of
momentum for a perfectly inelastic
collision:m₁ v₁ (i) + m₂ v₂ (i) = (m₁ + m₂) v (f)
(1800kg) (0) + (900kg) (20m/s) =
(1800kg+900kg)v(f)
v(f) = 18,000kg•m/s / 2700kg
= 6.7m/s
Try This: A trolley of mass 200kg moves with a
uniform speed of 36km/h on a
frictionless track. A child of mass
20kg runs on the trolley from one
end to the other (10m away) with a
speed of 4m/s relative to the trolley
in a direction opposite to its motion
and jumps out of the trolley. What isthe final speed of the trolley? How
much has the trolley moved from the
time the child begins to run?
(Ans: 25.9m)
182

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 183/422
Physics XI
EEE Consortium
183

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 184/422
Physics XI
EEE Consortium
184

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 185/422
Physics XI
EEE Consortium
185

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 186/422
Physics XI
EEE Consortium
7.1 Introduction
186

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 187/422
Physics XI
EEE Consortium
Rotational motion or we can say
circular motion can be analyzed in
the same way of linear motion. In thisunit we will examine the motion of
the objects having circular motion.
For example, we will find the velocity,
acceleration and other concepts
related to the circular motion in this
section. Uniform circular motion is
one of the example of this subject. In
uniform circular motion speed of theobject is always constant and
direction is changing. Thus, velocity
of the object is changing and as a
result object has acceleration. Some
concepts will be covered in this units;
rotational speed (angular speed),
tangential speed (linear speed),
frequency, period, rotational inertia ofthe objects, torque, angular
momentum and its conservation.
Inphysics, a rigid body is an
idealization of a solid body in
whichdeformation is neglected. In
other words, thedistance between
any two givenpoints of a rigid bodyremains constant in time regardless
of externalforces exerted on it. Even
though such an object cannot
physically exist due torelativity,
objects can normally be assumed to
be perfectly rigid if they are not
moving near thespeed of light.In classical mechanics a rigid body is
usually considered as a continuousmass distribution, while inquantum
mechanics a rigid body is usually
thought of as a collection of point
masses. For instance, in quantum
mechanicsmolecules (consisting of
the point masses: electrons and
nuclei) are often seen as rigid bodies
In this chapter, we will study aboutthe special kind of motion of a system
of particles that is rotation. We see
examples of rotational motion in our
everyday life for example rotation of
earth about its own axis create the
cycle of day and night. Motion of
wheel, gears, motors, planet, blades
of the helicopter etc are all theexample of rotational motion. To
understand the rotational motion as
a whole we are first required to
understand the concept of angular
position, velocity, acceleration,
centripetal acceleration. Till now in
our study of dynamics we have
always analyzed motion of an object by considering it as a particle even
when the size of the object is not
negligible. Here in this chapter we
will consider rigid bodies having
187

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 188/422
Physics XI
EEE Consortium
definite shape and size and are
capable of having both rotational and
translational motion.
7.2 Rotational Motion of a Rigid
Body
Rotational motion is more
complicated than linear motion, and
only the motion of rigid bodies will be
considered here. Arigid body is an
object with a mass that holds a rigidshape, such as a phonograph
turntable, in contrast to the sun,
which is a ball of gas. Many of the
equations for the mechanics of
rotating objects are similar to the
motion equations for linear motion.7.3 Angular velocity and angular
acceleration Theangular displacement of a
rotating wheel is the angle between
the radius at the beginning and the
end ofa given time interval. The SI
units are radians. The average
angular velocity (ω, Greek letter
omega), measured in radians per
second, is
Theangular acceleration (α, Greek
letter alpha) has the same form as
the linear quantity
and is measured in
radians/second/second or rad/s2.
The kinematics equations for
rotational motion at constant angular
acceleration are
Consider a wheel rolling without
slipping in a straight line. The
forward displacement of the wheel is
equal to the linear displacement of a
point fixed on the rim. As can be
shown in Figure ,d =S =rθ
188

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 189/422
Physics XI
EEE Consortium
Figure 1
A wheel rolling without slipping.In this case, the average forward
speed of the wheel isv =d/t = (rθ)/t =rω wherer is the distance from the
center of rotation to the point of the
calculated velocity. The direction of
the velocity is tangent to the path of
the point of rotation. The average forward acceleration of
the wheel isa T =r(ω f − ωo)/t =rα This component of the acceleration is
tangential to the point of rotation and
represents the changing speed of the
object. The direction is the same as
the velocity vector. The radial component of the linear
acceleration isa r =v 2/r = ω2 r.
Consider a rigid body of arbitraryshape rotating about a fixed axis
through point O and perpendicular to
the plane of the paper as shown
below in the figure-1 FIG.
while the body is rotating each and
every point in the body moves in a
circle with their center lying on the
axis of rotation and every pointmoves through the same angle
during a particular interval of time.
Consider the position of a particle
say ith particle at point P at a
distance ri from point O and at an
angle θi which OP makes with some
reference line fixed in space say OX
as shown below in the figure 2.
If particle moves an small distance
dsi along the arc of the circle in small
amount of time dt thendsi=vidt ----(1)
where vi is the speed of the particle.dθ is the angle subtended by an arc
of length dsi on the circumference of
a circle of radius ri,so dθ( in radians)
would be equal to the length of the
arc divided by the radius
i.e.
dθ=dsi/ri =vidt/ri ----(2)
distance dsi would vary from particleto particle but angle dθ swept out in
a given time remain same for all the
particles i.e. if particle at point P
moves through complete circle such
189

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 190/422
Physics XI
EEE Consortium
that
dθ=2π radian
Then all the other particles of the
rigid body moves through the angulardisplacement dθ=2π. So rate of
change of angle w.r.t time i.e. dθ/dt is
same for all particles of the rigid
body and dθ/dt is known as angular
velocity ω of the rigid body so
ω=dθ/dt ----(3).Putting equation (3) in equation (2)
we find vi=ri(dθ/dt) =riω ---(4)
This shows that velocity of ith
particle of the rigid body is related to
its radius and the angular velocity of
the rigid body. we know that 2π
radians =3600 or π radians/1800=1
And this relation can be used for
expressing angular velocity in degreeto that of angular velocity in terms of
radian. Angular acceleration is the
rate of change of angular velocity
w.r.t time. Thus for rigid body
rotating about a fixed axis
Differentiating equation (4) w.r.t to t
we find
where ai=ait=riα is the tangential
component of linear acceleration of a
point at a distance rifrom the axis.Each particle in the rigid body also
has the radial linear acceleration
component v2/r, which can also be
expressed in terms of an of angular
velocity i.e.
and this acceleration aic pointinginwards towards the radial line is
also known as centripetal
acceleration.
7.4 Kinetic energy of Rotation
From equation (4) we know that
magnitude of velocity of the ith
particle in a rigid body rotating abouta fixed axis is vi=ri(dθ/dt) =riω where
ri is the distance of particle from the
axis of rotation and ω is the velocity
of the particle. Kinetic energy of the
ith particle of mass mi is given by
The total kinetic energy of the rigid
body as a whole would be equal to
the sum of KEs of all particles in the
body thus
190

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 191/422
Physics XI
EEE Consortium
Since angular velocity ω is same for
all the particles in the body so
tell us how the mass of the rotating
body is distributed about the axis of
rotation is known as rotational
inertia or moment of inertia of the
rotating body. Moment of inertia ofthe rigid body can be obtained by
imaging the body to be subdivided
into large number of particles ,the
mass of the each particle is then
multiplexed by its squared distance
from the axis and then summing over
these products for all the particles in
the body.Si unit of moment of inertiais Kgm2. So rotational kinetic energy
of a body can now be written as:
Above expression of rotational kinetic
energy KE of a rotating rigid body is
analogous to the translational kinetic
energy where moment of inertia isanalogous to mass m (or inertia) and
angular velocity is analogous to
velocity v. Moment of inertia not only
depends on the mass but also on
how this mass is distributed about
the axis of rotation and it must be
specified first before calculating
moment of inertia of any body.
7.5 Calculation of moment of
inertia
We already know that the moment of
inertia of a system about axis of
rotation is given as:
where mi is the mass of the ith
particle and ri is its perpendicular
distance from the axis of rotation. For
a system consisting of collection of
discrete particles, above equation can
be used directly for calculating the
moment of inertia. For continuous
bodies ,moment of inertia about a
given line can be obtained using
integration technique. For this
imagine dividing entire volume of the
rigid body into small volume
elements dV so that all the points in
a particular volume element are
approximately at same distance from
the axis of rotation and le r be this
distance if dm is the mass of this
volume element dV, then moment of
inertia may be given by
191

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 192/422
Physics XI
EEE Consortium
Since density ρ of the element is
defined as mass per unit volume so
ρ=dm/dV hence equation (13) may be
written as,
For homogeneous body density ρ is
uniform hence ρ can be taken out of
the integral sign i.e.,
above integration can be carried out
easily for bodies having regular
shapes as can be seen from examples
given below.Moment of inertia of uniform rod
about a perpendicular bisector
Consider a homogeneous and
uniform rod of mass M and length L
as shown below in the figure:
we have to calculate the moment of
inertia of the rod about the bisector
AB. Consider middles point O to be
the origin of the rod .Also consider an
element of the rod between thedistance x and x+dx from the origin.
Since the rod is uniform so its
density ρ=M/L
Hence mass of the element
dm=(M/L)dx. Perpendicular distance
of this element from line AB is x,so
that moment of inertia of this
element about AB is:
For x=-L/2, the element is at the left
end of the rod ,As x changes from
-L/2 to +L/2 ,the element covers the
whole rod. Thus the moment of
inertia of the entire rod about AB is
Moment of inertia of the uniform
circular plate about its axis
Consider a uniform circular plate of
mass M and radius R as shown below
in the figure:
Let O be the center of the plate and
OX is the axis perpendicular to the
plane of the paper. To find the
moment of inertia of the plate about
the axis OX draw two concentriccircles of radii x and x+dx having
these centers at O, so that they form
a ring. Area of this ring is equal to its
192

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 193/422
Physics XI
EEE Consortium
circumference multiplied by its width
i.e. Area of the ring =2πxdx.
Mass of the ring would be
Moment of inertia of this ring about
axis OX would be:
Since whole disc can be supposed to
be made up of such like concentric
rings of radii ranging from O to R ,wecan find moment of inertia I of the
disc by integrating moment of inertia
of the ring for the limits x=0 and x=R
Moment of inertia of a uniform
sphere of radius R about the axis
through its center,
Consider a sphere of mass M and
radius R .Let us divide this sphere
into thin discs as shown in the
figure
If r is the distance of the disc then
Volume of the disc would be
and its mass would be
dm= ρdV. Moment of inertia of this
disc would be
Moment of inertia of the whole
sphere would be
Factor 2 appears because of
symmetry considerations as the right
hemisphere has same MI as that of
left one. Integration can be carried
out easily by expanding (R2-x2)2. On
integrating above equation we find
Now mass of the sphere is
193

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 194/422
Physics XI
EEE Consortium
Hence,
7.6 Theorems of Moment of Inertia
There are two general theorems
which proved themselves to be of
great importance on moment of
inertia. These enable us to determine
moment of inertia of a body about an
axis if moment of inertia of body
about some other axis is known as
Perpendicular Axis Theorem.
This theorem is applicable only to the
plane laminar bodies. This theorem
states that, the moment of inertia of
a plane laminar about an axis
perpendicular to its plane is equal to
the sum of the moment of inertia of
the lamina about two axis mutually
perpendicular to each other in its
plane and intersecting each other at
the point where perpendicular axis
passes through it. Consider plane
laminar body of arbitrary shape lying
in the x-y plane as shown below in
the figure.
The moment of inertia about the z-
axis equals to the sum of the
moments of inertia about the x-axis
and y axis. To prove it consider the
moment of inertia about x-axis
where sum is taken over all the
element of the mass mi. The moment
of inertia about the y axis is
Moment of inertia about z axis is
where ri is perpendicular distance of
particle at point P from the OZ axis.
For each elementri2=xi2 + yi2
Parallel Axis Theorem:
This theorem relates the moment of
inertia about an axis through the
center of mass of a body about a
194

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 195/422
Physics XI
EEE Consortium
second parallel axis. Let Icm be the
moment of inertia about an axis
through center of mass of the body
and I be that about a parallel axis ata distance r from C as shown below
in the figure
Then according to parallel axis
theorem I=Icm+Mr2 where M is the total mass of the
body. Consider a point P of the body
of mass mi at a distance xi from O
From point P drop a perpendicular
PQ on to the OC and join PC.So that OP2=CP2+ OC2+ 2OC.CQ(From geometry) andmiOP2=miCP2+ miOC2+ 2miOC.CQ
Since the body always balances
about an axis passing through center
of mass, so algebraic sum of the
moment of the weight of individual
particles about center of mass must
be zero. Here
which is the algebraic sum of such
moments about C and therefore eq as
g is constant Thus we have I = Icm + Mr2 ---(17)
7.7 Rotation with constant angular
acceleration
We have already studied motion with
constant acceleration while studying
translational motion. Now we will
study the rotational motion withconstant angular acceleration. When
a rigid body rotates with constant
acceleration we have
Again we have angular velocity
195

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 196/422
Physics XI
EEE Consortium
Equation (8), (9) and (10) are the
equation of motion with constant
angular acceleration.
7.8 Torque
It is easier to open a door by pushing
on the edge farthest from the hinges
than by pushing in the middle. It isintuitive that the magnitude of the
force applied and the distance from
the point of application to the hinge
affect the tendency of the door to
rotate. This physical
quantity,torque, is t = r × F sin θ,
whereF is the force applied,r is the
distance from the point of applicationto the center of the rotation, and θ is
the angle fromr toF.Consider two forces F1 and F2 having
equal magnitude and opposite
direction acting on a stick placed on
a horizontal table as shown below in
the figure
Here note that line of action of forces
F1 and F2 is not same. So they tend torotate the stick in clockwise
direction. This tendency of the force
to rotate an object about some axis is
called torque. Torque is the rotational
counterpart of force. torque tends to
rotate an body in the same way as
force tends to change the state of
motion of the body. Figure belowshows a rigid body pivoted at point O
so that point O is fixed in space and
196

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 197/422
Physics XI
EEE Consortium
the body is free to rotate
Let P be the point of application of
force. This force acting at point P
makes an angle θ with the radius
vectorr from point O to P. This forceF can be resolved into two
components
F⊥=Fsinθ
F||=Fcosθ
as they are perpendicular and
parallel tor Parallel component of force does not
produce rotational motion of bodyaround point O as it passes through
O. Effect of perpendicular
components producing rotation of
rigid body through point O depends
on magnitude of the perpendicular
force and on its distance r from O.
Mathematically, torque about point O
is defined as product ofperpendicular component of force
and r i.e.τ=F⊥r = Fsinθ r = F(rinθ) = Fd ---
(18)
where d is the perpendicular distance
from the pivot point ) to the line of
action of force F. Quantity d=rinθ is
called moment arm or liner arm offorce F. If d=0 the there would be no
rotation. Torque can either be
anticlockwise or clockwise depending
on the sense of rotation it tends to
produceUnit of torque is Nm
Consider the figure given below
where a rigid body pivoted at point O
is acted upon by the two forces
F1 and F2. d1 is the moment arm of
force F1 and d2 is the moment arm of
force F2
Force F2 has the tendency to rotaterigid body in clockwise direction and
F1 has the tendency to rotate it in
anti clockwise direction. Here we
adopt a convention that anticlockwise
197

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 198/422
Physics XI
EEE Consortium
moments are positive and clockwise
moments are negative. Hence
moment τ1 of force F1 about the axis
through O isτ1=F1d1 And that of force F2 would beτ2=-F2d2.Hence net torque about O isτtotal= τ1+ τ2=F1d1-F2d2Rotation of the body can be
prevented if : τtotal=0 or or τ1=-τ2, We earlier studied that when a body
is in equilibrium under the action ofseveral coplanar force, the vector
sum of these forces must be zero i.e.
ΣF x=0 and ΣF y=0 We know state our second condition
for static equilibrium of rigid bodies
that is
"For static equilibrium of rigid body
net torque in clockwise directionmust be equal to net torque in
anticlockwise direction w.r.t some
specified axis”.i.e. Στ=0. Thus for static equilibrium of an rigid
body, the resultant external force
must be zero.
i.e, ΣF=0. The resultant external torque about
any point or axis of rotation must be
zero. i.e., Στ=0.
7.9 Work and Power
We know that when we apply force on
any object in direction of the
displacement of the object, work issaid to be done. Similarly force
applied to the rotational body does
work on it and this work done can be
expressed in terms of moment of
force (torque) and angular
displacement θ. Consider the figure
given below where a force F acts on
the wheel of radius R pivoted at pointO. So that it can rotate through point
O.
This force F rotates the wheel
through an angle dθ and dθ is small
enough so that we can regard force to
be constant during corresponding
time interval dt
Work done by this force isdW=Fds
But ds=RdθSo, dW=(FR)dθNow FR is the torque ‘τ’ due to force
F. So we have198

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 199/422
Physics XI
EEE Consortium
dW= τ dθ ----(19)if the torque is constant while angle
changes from θ1 to θ2 then
W= τ (θ2-θ1)= τ ∆θ ---(20) Thus work done by the constant
torque equals the product of the
torque and angular displacement. we
know that rate of doing work is the
power input of torque soP=dW/dt= τ (dθ/dt)
= τ ωIn vector notation
P=τ.ω7.10 Torque and angular
acceleration
While discussing and defining torque
or moment of force, we found that
necessary condition for a body not to
rotate is that resultant torque aboutany point should be zero. However
this condition is necessary but not
sufficient for a rigid body to be static
for example in absence of resultant
torque a body once set in rotation will
continue to rotate with constant
angular velocity. Analogous to
translation motion when torque actson a rigid body rotating about a point
with constant angular velocity then
angular velocity of the body does not
remain constant but changes with
angular acceleration α which is
proportional to the externally applied
torque. Consider a force Fi acting on
the ith particle of mass mi of the rigid body pivoted about an axis through
point O as shown below in the figure:
This force Fi as discussed earlier hastwo components one parallel to the
radius vectorri and one
perpendicular to theri. Component of
force parallel to radius vector does
not have any effect on the rotation of
the body. Component of force
Fi perpendicular does affect the
rotation of the body and produces
torque about point O through which
the body is pivoted which is given by
τi=Fi⊥ri ---(21).if Fi⊥ is the resultant force acting on
the ith particle ,then from Newton’s
second law of motion:Fi⊥=miai⊥ = miriα ----(22)
where ai⊥ is the tangentialacceleration of the body. From
equation (21) and (22)
τi=miri2α
199

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 200/422
Physics XI
EEE Consortium
And taking sum over all the particles
in the body we have ∑τi=∑(miri2α)
=α∑(miri2
) ---(23)as angular acceleration is same for
all the particles of the body. We know
that
∑(miri2) = I where I is the moment of inertia of
the rigid body .Hence in terms of
moment of inertia equation 23
becomes ∑τ=Iα ---(24) We have denoted resultant torque
acting on the body ∑τsub>i as ∑τ. Both
the torque and angular acceleration
are vector quantities so in vector form
∑τ=Iα ---(25) Alternatively equation (24) which is
rotational analogue of Newton second
law of motion (∑F=ma) can be writtenas
∑τ= Iα = I(dω/dt)=d(Iω)/dt ---
(26) which is similar to the equation F=d(m v/dt=dp/dt
wherep is the linear momentum. The
quantity Iω is defined as the angular
momentum of the system of particles
Angular momentum =IωL=Iω.
From equation 26 we see that
resultant torque acting on a system
of particles equal to the rate of
change of the angular momentum,∑τ=dL/dt
7.11 Angular momentum andtorque as vector product
In any inertial frame of reference the
moment of linear momentum of a
particle is known as angular
momentum or, angular momentum of
a particle is defined as the moment of
its linear momentum. In rotational
motion angular momentum has thesame significance as linear
momentum has in the linear motion
of a particle. Value of angular
momentum of angular momentum is
equal to the product of linear
momentum andp(=m v) and the
position vectorr of the particle from
origin of axis of rotation.
Angular momentum vector is usually
represented byL. If the linear
momentum of any particle
isp=m v and its position vector from
any constant point ber then angular200

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 201/422
Physics XI
EEE Consortium
momentum of the particle is given by
L =r×p = m(r× v) ------- (1) Angular momentum is a vector
quantity and its direction isperpendicular to the direction
ofrandp and could be found out by
right hand screw rule. From equation
1 scalar value or magnitude of
angular momentum is given as
|L|=rpsinθ --------(2)
where θ is the angle betweenr andp.
For a particle moving in a circularpath,
v=ω×r; (3)
whereω is the angular velocity.
Therefore
L=m[r×(ω×r)]= mω(r.r)-r(r.ω)= mr2ω=Iω -------- (4)
But (r.ω)=0 because in circular
motionr andω are perpendicular toeach other. Here I is the moment of
inertia of the particle about the given
axis also the direction ofL andω is
same and this is a axial vector.
Writing equation (1) in the
component form we get
Writing angular momentum in
component form we get
writing equation 5 again we get
Comparing unit vectors on both thesides we get
Unit of angular momentum in CGS is
gm.cm2/sec and in MKS system it is
Kgm.m2/sec or Joule/sec.7.12 Angular momentum and
torque of the system of particles
Consider a system of particles made
up of number of particles, moving
independently to each other. Let L1,
L2, L3, .............etc. be the angular
momentum of different particles of
the system w.r.t. to a given point.
The angular momentum of theparticle system w.r.t. a given point is
equal to the vector sum of angular
momentum of all the particles of the
system.
201

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 202/422
Physics XI
EEE Consortium
IfL is the angular momentum of the
system of particles or the body as a
whole then,
Torque acting on system of
particles
From equation above angular
momentum of the system of particles
given as
When particles of the system are in
motion then their motion is due toexternal and interaction due to
internal forces so force acting on any
particle of the system is given by
Here Fiext is the external force acting
on the ithparticle and ∑Fij is the sumof the force acting on the particle due
to internal interaction of different
particles. Putting the value ofFi in
the equation we get,
RHS of the equation 2 shows that
summation of the moment ofinteracting force (internal) .Here
internal interaction forces balance
each other so torque due to internal
forces adds to zero hence
The total torque acting on a system of
particles is equal to the vector sum of
the torque acting on the different
particles due to external force on the
particle and its value is also equal to
202

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 203/422
Physics XI
EEE Consortium
the rate of change of angular
momentum
7.13 Law of conservation of
angular momentum
Torque acting on any particle is given
by
If external torque acting on any
particle is zero then,
Hence in absence of external torque
the angular momentum of the
particle remains constant or
conserved. Total torque acting on any
system is given by
If total external force acting on any
particle system is zero or,
If total external torque acting onanybody is zero, then total angular
momentum of the body remains
constant or conserved.
7.14 Kinetic Energy of rolling
bodies (rotation and translation
combined)
Let us now calculate the kineticenergy of a rolling body. For this
consider a body with circular
symmetry for example cylinder,
wheel, disc, sphere etc. When such a
body rolls on a plane surface, the
motion of such a body is a
combination of translational motion
and rotational motion as shown below in the figure.
At any instant the axis normal to the
diagram through the point of contact
P is the axis of rotation. If the speed
of the centre of mass relative to an
observer fixed on the surface is Vcmthen the instantaneous angular
speed about an axis through P would
be
ω=vcm/R
where R is the radius of the body. To
explain this consider the figure given
below
203

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 204/422
Physics XI
EEE Consortium
At any instant different particles of
the body have different linear speeds.
The point P is at rest vcm=0
instantaneously, the centre of mass
has speed vcm=Rω and the highest
point on the circumference P has
speed vcm=2Rωrelative to point P. Now again
consider the first figure the top of the
cylinder has linear speed vcm+ Rω=vcm+vcm=2vcm which is greater than the linear
speed of any other point on the
cylinder. We thus note that the centerof mass moves with linear speed
vcm while the contact point between
the surface and rolling object r has a
linear speed of zero. Therefore at that
instant all particles of the rigid body
are moving with the same angular
speed ω about the axis through P and
the motion of the body is equivalentto pure rotational motion. Thus total
kinetic energy is
K=½(IPω2)
where IP is the moment of inertia of
the rigid body about point P.
From parallel axes theorem IP=Icm+MR2
where Icm is the moment of inertia of
the body of mass M about parallel
axis through point O. Therefore,
K=½(Icmω2)+½(MR2ω2) =½Icmω2+½MVcm2
here the first term represents the
rotational kinetic energy of the
cylinder about its center of mass, and
the second term represents the
kinetic energy the cylinder would
have if it were just translating
through space without rotating. Thus, we can say that the total
kinetic energy of a rolling object is
the sum of the rotational kineticenergy about the center of mass and
the translational kinetic energy of the
center of mass. If k is the radius of
gyration of the body about a parallel
axis through O then I=Mk2 and total
kinetic energy would then be,
204

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 205/422
Physics XI
EEE Consortium
The moments of inertia for different
regular shapes are shown in Figure
below.
205

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 206/422
Physics XI
EEE Consortium
206

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 207/422
Physics XI
EEE Consortium
207

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 208/422
Physics XI
EEE Consortium
208

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 209/422
Physics XI
EEE Consortium
8.1 Introduction
The discovery of universal law of
gravitation by Isaac Newton is one of
the greatest events in the history of
Physics. Until the 17th century the
tendency of a body to fall to the earth
ie, its weight was considered as an
inherent property of all bodies which
needed no further explanation. ButNewton and his contemporary Robert
Hooke regarded the weight of a body
as the result of the attraction
between the body and the earth.
209

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 210/422
Physics XI
EEE Consortium
Till Newton’s time the laws governing
the motion of planets were
considered different from those
governing motion of bodies falling tothe earth. The motion of planets and
the sun was a subject of great
interest at that time. This subject
was discussed by the students of
material philosophy at Cambridge in
1664. Newton was one among them.
In 1665, the institution was closed
temporarily on account of plague andthe students were sent home. Newton
continued his thoughts on
gravitational force.One day, when he was sitting under
an apple tree in a contemplative
mood, the fall of an apple caught his
attention. He compared the
acceleration of a body like the applefalling to the earth with the
acceleration of the moon falling
towards the earth while revolving
round the earth in its orbit. This lead
him to the universal law of
gravitation. The steps which led him
to this important law can be
summarized as follows.
The acceleration of an apple falling
near the earth’s surface a0 = g = 9.8
m/s2. The radial acceleration of the
moon when it revolves round theearth is am = v2/rm where v is the
velocity of the moon and rm is the
radius of the moon’s orbit.
v =2 π rm
period of t h e moon
rm = 3.84 x 108mPeriod =27.3 days = 27.3 x24 x60 x60
s v =
2 πX 3.84 X 108
2.73 X 24 X 60 X 60
= 1.02 X 103 m/s= 1.02 km/s
am = v2/rm =(1.02 X 10
3 )2
3.84 X 108
= 2.72 X 10-3m/s2
am/aa =2.72 X 10
−3
9.8 = 2.77 x 10-4
At the time of Newton, it was known
that the moon’s orbit had a radius of
about 60 times that of the radius of
the earth. ie, rm = 60rere = radius of the earth ie, distance of
the apple from the centre of the
earth.(
re
rm
¿¿2 =
( 1
60
¿¿2 = 2.77 x 10-4
Thus the ratio of the accelerations is
in the inverse ratio of the square of
210

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 211/422
Physics XI
EEE Consortium
the radii of the orbits. In other words,
the ratio of the forces producing the
acceleration of the moon and the
apple is in the inverse ratio of thesquare of the distances from the
centre of the earth. This led Newton
to conclude that the force which
makes the apple fall to the earth and
the force which makes the moon
revolve round the earth are one and
the same. The force varies inversely
as the square of the distance. Newtonmade these calculations and arrived
at the conclusion in 1666. But he did
not publish it till 1687 for two
reasons.
(1) Non – availability of accurate values
of the distances involved.(2) In the above calculation, the distance
of the apple was taken from thecentre of the earth.
This assumes that the entire mass of
the earth is concentrated at the
centre of the earth. Such an
assumption could not be justified till
Newton developed calculus and
proved this result. In 1687, he
published the inverse square law ofgravitation in his book “Principia
Mathematica”
8.2 Newton’s universal law of
gravitation
From further analysis, Newton found
that the force of attraction by a body A exerted on another body B depends
on the mass of the body a. By
Newton’s III law, the body B exerts an
equal force on A. It must be
proportional to the mass of the body
B as well. Therefore the force between
two bodies must be proportional to
the product of their masses. The universal law of gravitation was
stated as follows:“Every material particle attracts every
other material particle with force
which is directly proportion to the
product of the masses and inversely
proportional to the square of the
distance between them”
Let m1 and m2 be the masses of two
particles separated by a distance ‘d’.
Let F be the attraction between them.
Then F ∞ m1m2 --------- (1)
F ∞1d
2 ------------ (2)
Combining (1) and (2) F ∞m1m2
d2
211
F =

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 212/422
Physics XI
EEE Consortium
where G is a constant called
universal constant of gravitation,
which is the same for all particlesirrespective of their masses, nature,
position and time. The law is known as universal law of
gravitation because it is true for all
particles, at all times, and at all
places. If two large sized bodies are
involved ‘d’ is the distance between
their centres of mass.Did you know?
8.3 Expression for acceleration due
to gravity
Consider a body of mass ‘m’ on the
surface of the earth of mass M and
radius R. The force of gravity acting
on the body
F =GMm
R2
Acceleration due to gravity
g = Fore of gravit!
Mass
g = GMm / R2
m = GM R
2
Variation of g with height ‘h’ above the
ground:
If we go to the top of a mountain, the
distance from the centre of the earth
will increase. Therefore the value of g
will decrease. The variation of ‘g’ with
height can be found out as follows.
Let ‘g’ be the value of acceleration
due to gravity on the surface of earth. Then
g =GM
R2 --------------(1)
212
Quantum Gravitation (#$ %&ant&m '$at) s
an *++#$t t# *an "$atat#n #n t/* at#mc
and s&bat#mc **s. /* t/* Theory of
General Relativity *ans "$atat#n +#$ a$"*
sca* **nts and t/* Law of Universal
Gravitation $#d*s an *&at#n +#$ #$dna$
st&at#ns, n*t/*$ a$* ab* t# *an
"$atat#n +#$ *t$*m* sma s*s and
mass*s /*$* &ant&m *++*cts ta* ac*.
T/* %&ant&m T/*#$ #+ '$atat#n $#d*s
an *anat#n #+ t/* m*c/ansm #+ "$atat#n
t/at s d++*$*nt +$#m t/* Law of Universal
Gravitation and General Relativity Theory of
Gravitation. t stat*s t/at "$atat#n s ca&s*d
b an *c/an * #+ raviton a$tc*s #$ &anta

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 213/422
Physics XI
EEE Consortium
Let g1 be the acceleration due to
gravity at a height ‘h’ from the
surface of the earth. Then
g1=GM
( R+h)2 --------------
(2)
g
g1 =( R+h)2
R2
= (1 +h
R )2 = 1+2 (h
R ¿
------- (3)Uing (1+x)n= 1 + nx where x <<<< 1
And neglecting higher termh2
R2
g
g1 = (1 -2h R )
Therefore g1= g (1 -2h R )
Example 1
At what height from the surface of
the earth will the value of be 1% less
than that on the surface of the
earth?
h = R2 (
g−g1
g1 ¿
Here R = 6400 km g = 100 (say) g1 = 100 – 1 = 99
Therefore h =6400
2 (1
99¿=32"m
nearly
Example 2
At what height from the surface of
the earth will the value of ‘g’ be the
half the value of g on the surface ofthe earth?
Solution: We know that g =GM
R2
---- (1)
Let the value of g be,g2 at a height
h above the ground.
Therefore g2 = GM ( R+h)2 --------------
(2)
Dividing 2 =( R+h)2
R2
√2 = R+h
R = R+h = √2R
h = √2R – R = (√2 -1)R = 0.414 R
Example 3
If g is the acceleration due to gravity
on the surface of the earth, what will
be its value at a height equal to the
radius of the earth?Solution:
g =GM
R2 and g1=
GM
( R+h)2
But h = R
213

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 214/422
Physics XI
EEE Consortium
g1 =GM
(2 R )2
g1
g =
1
4
.’. g1 =g4
Variation of g with depth below the
surface:
We know that
g =GM
R2
But M =4
3 πR3D
where D is the mean densitySo g =
GM
R2 x
4
3 πR2D
g =4
3 πGDR --------- (1)
where R is the distance from the
centre of the earth. Let g1 be the
acceleration due to gravity at the
bottom of a mine of depth ‘h’. Theng1 =
4
3 πGD(R – h)
-------- (2)
g1
g = R−h
R = 1 -h
R
---------- (3)
h = R (g−g1g ¿
From equation (2) we find that
acceleration due to gravity decrease
as the depth of the mine increases.
At the centre of the earth h of R. g1 =
0.
Thus acceleration due to gravity atthe centre of the earth is 0.
From (3)
g1= g (1 -hg ¿
Example 4
At what depth below the surface of
the earth will the value of g be 1%less than the value of g on the
surface?Solution:
We know that h = R(g−g1
g ¿
R = 6400 kmg = 100 (say)
g1
= 99h = 6400 x
1
100 = 64 km
Weightlessness
The condition for weightlessness is214

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 215/422
Physics XI
EEE Consortium
g = R #02 GM
R2 =
R #02
Multiplying both sides by mGMm
R2 = mR #0
2
Thus a body appears to be
weightless, when the gravitational
force is completely utilized to supply
centripetal force. This is what
happens in a satellite. In a satellite
the gravitational force on the body
inside the satellite will be completely
utilized for making it revolve round
the earth.No portion of the gravitational force
will be available to keep the bodies in
satellite pressed on the floor of the
satellite. Therefore the body will have
a tendency to float. This is what is
known as weightlessness in space
flight.
8.4 Gravitational Potential Energy
Around the earth there is a
gravitational force field. A mass
placed in this field possesses
gravitational potential energy due toits position in the force field. The
work done in lifting a body in this
field is stored as gravitational P.E of
the body. Near the surface of the
earth, the gravitational force acting
on the body of mass m is a constant
= mg. Therefore the work done in
lifting a body through a small heighth = mgh. It resides on the body as
the increase in P.E. The increase in
P.E. = mgh.
On the other hand if we consider
distances comparable with the radius
of the earth, the variation of
gravitational force is to be
considered. Suppose we want to find
the work done in lifting a body of
mass ‘m’ from a radial distance r1, to
radial distance r2. The procedure is as follows;Consider a body of mass ‘m’ at P at a
distance ‘r’ from the centre of the
earth. The gravitational force acting
on the body is F =GMm
r2
Consider a neighbouring point P1 at a
distance dr. Over this small distance,
the gravitational force can be
considered to be a constant.
Therefore the small amount of work
done in lifting a small mass through
a distance dr is215

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 216/422
Physics XI
EEE Consortium
dw = Fdr =GMm
r2
r
Therefore total work done in lifting
the bodyFrom r1 to r2
W = ∫r1
r2
GMm
r2
dr
= GMm∫r1
r2
r−2 dr = GMm[ r−1
−1 ]r1
r2
= -GMm[ 1r ]r1
r2
= -
GMm[( 1r 2 )−( 1r1
)] W =
GMm[ 1r1
−1
r 2 ]
This work done is converted into P.E. Therefore the increase in P.E. of the
body when lifted from r1 to r2 is equalto:
V(x)=GMm[ 1r1
−1
r 2 ]
Example 5
Starting from the expression for the
increase in PE when a body is taken
from r1 to r2 obtain expression forincrease in PE near the surface of the
earth.Solution:
Expression for increase in PE is
GMm[ 1r1
−1
r 2 ]
Suppose a body of mass ‘m’ is liftedfrom the surface of the earth through
a height ‘h’ Then r1 = R and r2 = R + h
So increase in PE =GMm[ 1r1
−1
r 2 ]
= GMm[ 1 R− 1
R+h ]
=GMm[ R+h− R
R ( R+h ) ]= GMm[ h
R( R+h) ]h is small compared to R. Therefore
(R+h) is nearly equal to R.
Increase in P.E. =GMm
h
R2
=GM
R2
XmX h
= g X m X h = mgh
Example 6
Assuming the expression for the
increase in PE, obtain expression forthe PE of a body at a radial distance r
from the centre of the earth.Solution:
Increase in PE when a mass m is
taken from216

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 217/422
Physics XI
EEE Consortium
r1 to r2 is equal toGMm[ 1r1
−1
r 2 ]
PE at r2 – PE at r1 =GMm
[ 1
r1
−1
r 2
]Let us find the increase in P.E. when
the body is lifted from r to ∞ Then r1 =r; r2 = ∞P.E. at infinity – PE at r =
GMm[ 1r − 1
$ ] =
GMm[ 1r −0]=
GMmr
The zero level of P.E is taken at
infinity because at infinity the
gravitational force acting on the body
will be zero. Therefore 0 – P.E at r =
GMmr
P.E at r =−GMm
r
Thus the gravitational P.E. of a mass
‘m’ at a distance r from a mass M is
equal to−GMm
r
Because P.E. at infinity is zero, the
P.E. at any finite distance is negative.
The negative sign shows that work is
to be done in increasing the distance.
The negative sign in the P.E also
shows that the force involved is one
of attraction.
If two masses are separated by a
distance and if the masses are free to
move, they will approach each other
under the mutual force of attraction.
In doing so the bodies are doing
work. Therefore their P.E. will
decrease.
If the PE is found to be positive then
the force involved will be one of
repulsion.
Example 7
Represent graphically the variation of
gravitational PE with distance apart.Solution :
P.E. = = −GMmr
P.E. ∞1
r
P.E x r = constant Therefore the graph between the P.E.
and the radial distance is a
rectangular hyperbola.
217

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 218/422
Physics XI
EEE Consortium
Did You Know ?
Expression for the intensity of
gravitational field on the surface of the
earth:
Consider a body of mass ‘m’ placed
on the surface of the earth of mass M
and radius R. Gravitational force on
the mass m is
F =GMm
r2
Intensity of gravitational field E =
F m
= ( GMm
R2
m ) =GM
R2
---------------- (1) Acceleration due to gravity on the
surface of earth
g =GM
R2
------------------ (2) Therefore from (1) and (2) E = gIntensity of gravitational field is equal
to the acceleration due to gravity.
E = g =GM
R2
8.5 Escape Velocity
If we throw a stone, it first rises upand then comes down. It is because
of the gravitational force of the earth
that it comes down. If we increase the
speed of projection, it rises to greater
height before falling.If we project it with sufficient speed it
will escape from the earth’s
gravitational force of attraction andreach infinity.“This minimum velocity with which a
body is to be projected, so that it may
escape from the earth’s gravitational
force of attraction altogether and218
Gravitational Field:
“The !"#e "ro$%& " '" (here
)r"*i+"+io%" "++r"#+io% i e-!erie%#e& i
#"e& )r"*i+"+io%" e&.Strength of Gravitational Field:
“The +re%)+h or i%+e%i+/ o
)r"*i+"+io%" e& "+ " !oi%+ i &e%e&
" +he or#e "#+i%) i% $%i+ '" "+ +he

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 219/422
Physics XI
EEE Consortium
never return to the earth is called
Escape velocity. It is denoted by ‘ve’.
Expression for Escape VelocityIf we neglect air resistance an
expression for escape velocity can be
obtained as follows.
Consider a body of mass m on the
surface of the earth of mass M and
radius R.
PE on the ground =−GMm
R
Let Vc be the escape velocity. Then KE
on the ground =1
2 m v
2
Total energy on the ground=
−GMm R +
1
2 m v
2
---------- (1)If we project the body with escape
velocity vc it will just reach infinity
with zero kinetic energy.KE at infinity = 0PE at infinity = 0
Total energy at infinity = 0 -----------(2)By law of conservation of energy
−GMm
R +1
2 m v
2
= 0
1
2 m v
2
=GMm
R v
2
= 2
GM
R
vc = √2GM
R
--------------- (3)
vc = √2GM
R2 R = √2gR
--------------- (3) Where g is acceleration due to gravity
on the surface of earthg = 9.8 m/s2
R = 6.38 x 106m Vc = √2 x 9.8 x 6.38 x 106
= 11.2 x 103 m/s= 11.2 km/s
Escape velocity from the Moon can be
calculated from the relation
vc = √2GM
R
Where M is the moon’s mass and R is
Moon’s radiusM = 7.4 x 1022 kgR = 1740 km = 1740 x 1000 mG = 6.65 x 10-11
vc = √
2 X 6.67 X 10−11
X 7.2 X 1022
1740 X 1000
= 2.38 km/s vc for Moon = 2.38 km/s
219

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 220/422
Physics XI
EEE Consortium
The escape velocity of a body on
earth from the solar system can be
calculated from the relation
vc = √2GM
R
Where M is the mass of the sun Ms =
2 x 1033 kg, R is radius of the earth’s
orbit R = 1.5 x 1011 m
vc = √2 X 6.67 X 10
−11 X 2 X 10
30
1.5 x1011 = 42
km/s
This is the escape velocity of a body
on earth with respect to the sun. But
the earth has an orbital velocity 30
km/s. Everybody on earth possesses
this speed. Therefore the escape
velocity of a body on earth from the
solar system with respect to the earth
itself is equal to 42 – 30 =12 km/s.Escape velocity from the sun = 618
km/s
vc = √2GM
R
The escape velocity is independent of
the mass of the body.
The escape velocity is
independent of the angle ofprojection
vc = √2GM
R
M =4
3 πR3D
vc = √2G R x
4
3 πR3D
= R √2Gx4
3 πD = Constant x
REscape velocity from a planet is
directly proportional to the radius of
the planet if the mean density is a
constant.
Do you know?
Example 8
220
Gravitational Escape Velocityfor a Black Hole
Black Hole s a *$ mass* s&n #$ sta$
t/at /as c#as*d #n ts*+, s&c/ t/at ts
"$atat#na +*d s s# st$#n" t/an n#t **n
"/t can *sca* ts &. t s ca*d a bac
/#* b*ca&s* t/at s /# t a*a$s t#
t**sc#*s.
T/* *&at#n +#$ t/* "$atat#na *sca*
*#ct #+ a ac #* &s*s t/* s**d #+
"/t as t/* /"/*st #ssb* *#ct +#$
mat*$a t$n" t# *sca* t/* sta$. T/*
d*+nn" s*a$at#n +$#m t/* c*nt*$ #+ a
ac #* s ca*d t/* event
horizon #$ Schwarzschild radius and can b*

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 221/422
Physics XI
EEE Consortium
Explain why the moon does not have
an atmosphere while the earth
continues to have it?
Solution:Escape velocity from the moon is
nearly 2.38 km/s. The R.M.S velocity
of gas molecules is greater than this.
Therefore the gas molecules escaped
from the moon one by one and the
moon does not have an atmosphere
at present.
The escape velocity from the earth is very large equal to 11.2km/s. The
R.M.S velocity of gas molecules like
oxygen and nitrogen is much less
than this. Therefore, they cannot
escape from the earth. The earth still
continues to have an atmosphere.
Example 9
Explain why earth’s atmosphere has
no hydrogen in it? Why the sun has
plenty of it?Solution:
The RMS velocity VRMS= √3 RT M
For hydrogen and helium M is small.
Therefore their RMS velocity is larger
than 11.2 km/s. Therefore theearth’s atmosphere does not have
hydrogen. Though helium is escaping
it is being replenished by the
radioactive decay process.
Though there is no hydrogen in the
earth’s atmosphere, the sun has
plenty of it, because, the escape
velocity from the sun is very largeequal to 618 km/s.
8.6 Satellites
A satellite is a body which revolves
round a planet. A planet is a body
which revolves round the sun. The
moon is revolving round the earth.
Hence it is a natural satellite of theearth. Any man made body which
revolves round the earth just like
moon is called an artificial satellite.Newton was the first to think of an
artificial satellite. His arguments may
be summarized as follows:
Imagine a tower extending above the
earth’s atmosphere. Imagine a gun
being fixed horizontally. If a bullet is
fired, the bullet follows a curved path
and strikes the point A1 on thesurface of the earth. If the speed is
increased progressively, it strikes at.
A2, A3, A4 etc. But for a certain speed
of projection, the bullet will not be
able to hit the earth. Because of its221

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 222/422
Physics XI
EEE Consortium
velocity and the curvature of the
earth, it will continue to fall to the
earth, but not able to reach it. It will
reach the point of projection andcontinue its motion round the earth.
Thus for a satellite to be launched, it
must be raised to a sufficient height
and then given a sufficient horizontal
velocity. It will then revolve round the
earth in a fixed orbit.
8.7 Orbital Velocity
Consider a satellite in its orbit of
radius r. Let m be the mass of the
satellite. Let V0 be the orbit velocity. Then centripetal force required for
circular motion =m% 0
2
r
This is supplied by the gravitational
forceGMm
r2
m% 02
r =GMm
r2 % 02
=GM
r
v0 = √GM
r --------- (1)
v0 ∞1
√ r v0 ∞ rn
where n =
−1
2
r = R+h, where h is the
height of the satellite from the
surface of the earth.
ie v0 = √GM
R+h -------- (2)
R is nearly equal to 6400 km. For a
close orbit h = 200 km. Therefore h
can be neglected compared to R.
v0 = √GM R (3)
v0 = √ R
GM
R2
v0 = √Rg (4)Equations 3 and 4 are for close orbits
v0 = √Rg =
√6400x1000x10= 8000 m/s = 8 km/sExpression for Period of a
Satellite:
Consider a satellite in an orbit of
radius ‘r’.
222

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 223/422
Physics XI
EEE Consortium
Distance covered for one revolution =
2πr
Period =
2 πr
% 0 =
2 πr
√
GM
r =
2 πrX r1/2
√ GM
T=2 πX r
3/2
√ GM
T = r3 /2
T2∞ r3
This is Kepler’s third law. Another expression for period:
T=2 π r
3/ 2
√ GM
r= R + hGM = r2g
Substituting the value,
T =
R+h¿
¿¿1/22π ¿¿
=
R+h¿¿¿2
2π √ ¿¿
T = 2π
R+h
¿¿¿3¿
√ ¿
For a satellite in a close orbit h is
nearly = 200 km
T = 2π
6400+200¿ X 10(¿¿ 3 ]2¿¿
√ ¿
=1.46 hour
Thus a satellite at about 200 km
above the surface of the earth will
make one revolution in every 1.46
hours. Such a satellite could be seen
from a place on earth only
intermittently. It can be seen for
some time every 1.46 hours. If h
increases ‘T’ also will increase. For a
certain height, period T will become
equal to 24 hours. The earth’s period
of rotation about its own axis is also
24 hours. If the direction of the
rotation of satellite is same as that of
the earth, the satellite will appear to
be stationary above the surface of the
earth. Such a satellite is called
Geostationary satellite or parking
satellite or synchronous satellite.
8.7.1 Geostationary or
Synchronous Satellite:
A geostationary satellite is a satellite
which appears to be stationary above
a place on the surface of the earth.its period is same as the period of
rotation of the earth, about its own
axis i.e, 24
223

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 224/422
Physics XI
EEE Consortium
hours. Its direction of rotation is
same as that of the earth ie from
west to east. All satellites are
projected from west east. This is totake advantage of the inertia of
motion caused by the rotation of the
earth. Its plane of rotation is the
equatorial plane.(The plane of rotation of every
satellite passes through the centre of
the earth.)
Its height from the ground is about36000 km.Synchronous satellites are used for
relaying radio, television, telephone
signals from one place to another.
Therefore stationary satellites are
also known as communication
satellite Three such satellites arranged at the
corners of an equilateral triangle can
be used to take TV and radio signals
to all in habituated areas of earth. They are used for weather forecastingSatellites are used for studying
atmosphere and cosmic rays. They are used in warfare and also for
spy work.
Some communication Satellites:1)Insat IA2)Insat IC3)Insat I-D4)Telstar (the first communication
satellite)
Example 10
Calculate the height of synchronous
satellite.
Solution:
We know that T2 =4 π
2( R+h)2
R2
g
( R+h)3 = ( T 2 R2 g
4 π 2 )
R+h¿ ) = ( T
2 R
2g
4 π 2 )
1/3
=
( (24 X 60 X 60 )2 X (6400 X 1000 )2 X 10
4 π 2 )
1 /3
= 42650 km R + h = 42650 km h = 42650 – R
= 42650 – 6400= 36250 km
Example 11 What is the relation between orbital
velocity and escape velocity?Solution: The escape velocity is
ve = √2GM
R
224

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 225/422
Physics XI
EEE Consortium
For a close orbit
ve = √GM
R
Dividing both1
√2 = 0.707 .’. v0 = 0.707 ve
8.8 Kepler’s Laws of Planetary
Motion
I Law – Law of Elliptical Orbits:
Every planet revolves round the sun
the elliptical orbit, with the sun, at
one of the foci.II Law – Law of equal areas:
The areal velocity of a planet is a
constant ie., the radius vector joining
the sun and the planet sweeps out
equal areas in equal intervals of time.III Law – Harmonic Law:
The square of the period of revolution
of a planet is directly proportional tothe cube of the mean distance
between the sun and the planet.
Explanation of First Law:
The shape of the ellipse is as shown
in the figure. AB and CD are the
major and the minor axis
respectively. F1 and F2 are the foci O
is the centre. The sun is at F1. When
the planet is at B it is farthest from
the sun. B is known as APOGEE.
When the planet is at A it is nearestto the sun. A is known as PERIGEE.F1O/AO = e. It is known as
eccentricity of the ellipse.
Second Law:
Area SAP is the area traced by the
radius vector in one month when the
planet is near perigee and area SBQ
is the area traced by the radius
vector in one month when the planetis near apogee. These two areas are equal. It means
that the linear velocity of a planet is
not a constant. It varies with position
on the orbit. It is maximum at
perigee and minimum at apogee. If vpis the velocity at perigee and va is the
velocity at apogee then.
%p%e =
1+e1−e
where e is the eccentricity of the
ellipse.
225

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 226/422
Physics XI
EEE Consortium
Third Law:
Let ‘T’ be the period of revolution and
‘r’ the mean distance between the
sun and the planet. Then T2
∞ R3
.Let T1 and T2 be the period of revolution
of two planets and r1 and r2 b e their
mean distance from the sun. Then T12∞ r13
T22∞ r33
SoT 1
2
T 22 =
r13
r2
3
Deducing Newton’s law of gravitation
from Kepler’s laws.
Consider a planet of mass m
revolving round the sun of mass M in
a circular orbit of radius ‘r’ with
orbital velocity v0.
Centripetal force F =m% o
2
r .
But v0=2 πr
T .
F = ( mr ) x ( 4 π
2r2
T 2 ) =
4 π 2
m
r2 x
r3
T 2
By Kepler’s III law
r3
T 2 = constant, K
F =4 π
2m&
r2 F = 4 π
2 & x (
m
r2¿
The source of this force lies in the
sun and therefore the factor 4 π 2 &
depends only on the sun. Thesimplest assumption is that the
factor 4 π 2 & is directly proportional
to the mass of the sun.4 π
2 & ∞ M
4 π 2 & = GM where G is a constant
ie, F =
GMm
r2
Example 12
What is the ratio¿T'∨ ¿
&'¿ for a
satellite?Solution:
¿T'∨¿ =1
2
GMmr
&' =1
2
GMmr
¿T'∨ ¿ &'
¿ = 1
Example 13
What is the ratio of¿ ('∨ ¿
&'
¿ in
any orbit?Solution:
226

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 227/422
Physics XI
EEE Consortium
¿ ('∨ ¿ &'
¿ =( GMm
r )1
2 (GMmr ) = 2
Example 14
A body of mass m is taken to a height
h = nR form the surface of the earth.
What is the increase in PE?Solution:
Initial PE = -GMm
R
Final PE = -GMmnR+ R = -
GMm
(n+1) R
Increase in PE = Final PE – Initial PE
=-(GMm)(n+1) R -
(−GMm R )
= GMm R -
(GMm)(n+1) R
=GMm
R [1 -
1
n+1 ]
=GMm
R [
n+1−1
n+1 ]
=1
n+1 ( GMm R )
=n
n+1 (mgR)
Example 15
If the increase in PE is1
2 mgR what
is the height to which a body is
taken?Solution:
12 mgR = nn+1 mgR
nn+1 =
1
2
n = 1 Therefore h = nR = 1Rh = R
Example 15
What is the ratio of the acceleration
due to gravity?Solution:
g p
ge =
m
n2
Where m = M p M e = 2
n = R p
Re = 2
thereforeg p
ge =
2
22 =
1
2
227

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 228/422
Physics XI
EEE Consortium
Example 16
Planets Neptune and Saturn are at
1013
m and 1012
m respectively. Whatis the ratio of their periods?Solution:
T2 ∞ r3
T n2 ∞ rn
3
T s2
$ rs3
T n2
T s2 =
rn3
rse3 = ( 10
13
1012 )
3
= 103
T 0T e = 10√10
228

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 229/422
Physics XI
EEE Consortium
229

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 230/422
Physics XI
EEE Consortium
230

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 231/422
Physics XI
EEE Consortium
231

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 232/422
Physics XI
EEE Consortium
9.1 Introduction
In Chapter 7, we studied the rotationof the bodies and then realised that
the motion of a body depends on howmass is distributed within the body. We restricted ourselves to simplersituations of rigid bodies. A rigid body generally means a hard solidobject having a definite shape andsize. But in reality, bodies can bestretched, compressed and bent.Even the appreciably rigid steel bar
can be deformed when a sufficientlylarge external force is applied on it. This means that solid bodies are notperfectly rigid. A solid has definite shape and size. Inorder to change (or deform) the shapeor size of a body, a force is required.If you stretch a helical spring bygently pulling its ends, the length of
the spring increases slightly. When you leave the ends of the spring, itregains its original size and shape. The property of a body, by virtue of which it tends to regain its originalsize and shape when the applied
232

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 233/422
Physics XI
EEE Consortium
force is removed, is known aselasticity and the deformationcaused is known as elastic
deformation. However, if you applyforce to a lump of putty or mud, theyhave no gross tendency to regaintheir previous shape, and they getpermanently deformed. Suchsubstances are called plastic andthis property is called plasticity.
Putty and mud are close to idealplastics.
The elastic behaviour of materialsplays an important role inengineering design. For example, while designing a building, knowledgeof elastic properties of materials likesteel, concrete etc. is essential. Thesame is true in the design of bridges,automobiles, ropeways etc.One could also ask — Can we design an aeroplane which is very light but sufficiently strong?Can we design an artificial limb which is lighter but stronger? Whydoes a railway track have a particularshape likeI? Why is glass brittle while brass is not? Answers to suchquestions begin with the study ofhow relatively simple kinds of loadsor forces act to deform differentsolids bodies. In this chapter, weshall study the elastic behaviour andmechanical properties of solids which would answer many such questions.
9.2 Some Important definitions
Deforming force
The applied force on a body whichchanges the shape or size of the bodyis called deforming force
Restoring force
When a deforming force is removedfrom the body, the internal force which brings back the body tooriginal shape is called restoringforce.
Elasticity
Property of body by virtue of which ittends to regain its original shape orsize on removal of deforming force iscalled elasticity.Elastic body
Those bodies which regain its original
shape/size on removal of deformingforce are called elastic body.eg. Steel, rubber (steel is more elasticthan rubber)Plastic body
Those bodies which do not regain itsoriginal shape/size on removal ofdeforming force is called plastic bodies. eg. Clay, putty, plastic etc.
Perfectly elastic body
Those bodies which regain its originalshape/size immediately and
233
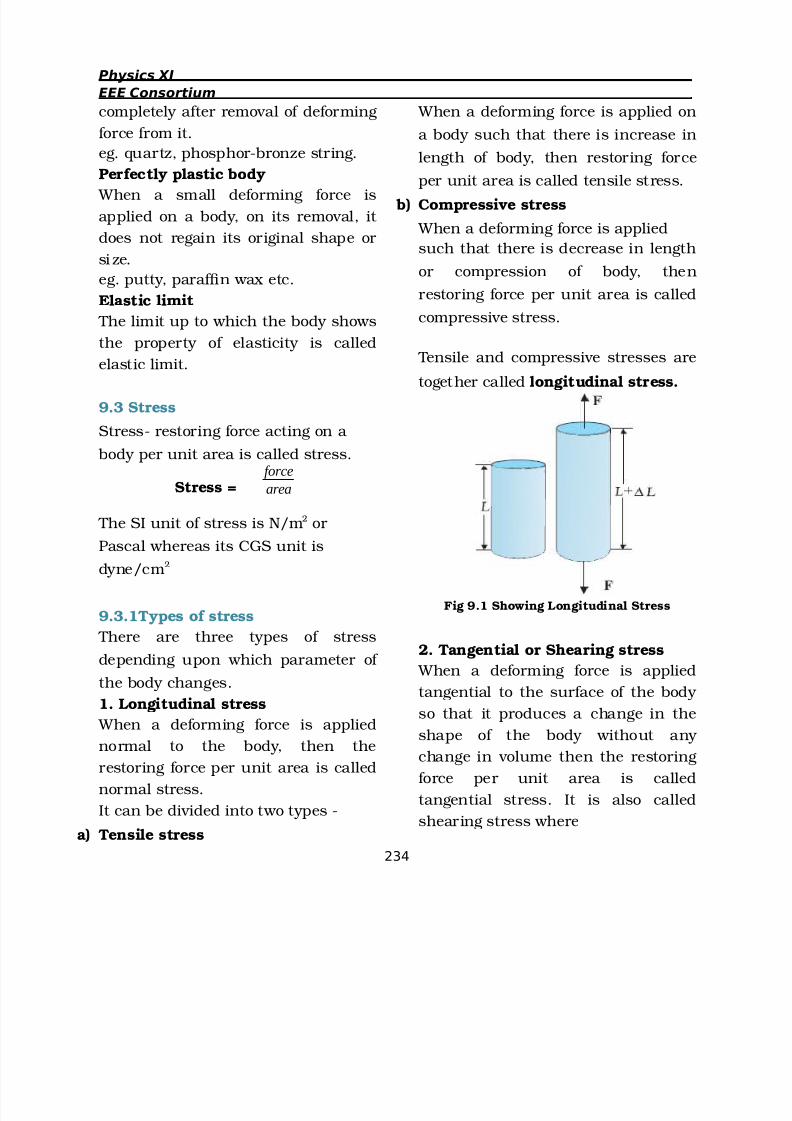
7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 234/422
Physics XI
EEE Consortium
completely after removal of deformingforce from it.eg. quartz, phosphor-bronze string.
Perfectly plastic body When a small deforming force isapplied on a body, on its removal, itdoes not regain its original shape orsize.eg. putty, paraffin wax etc.Elastic limit
The limit up to which the body showsthe property of elasticity is called
elastic limit.
9.3 Stress
Stress- restoring force acting on a
body per unit area is called stress.
Stress =forearea
The SI unit of stress is N/m2 or
Pascal whereas its CGS unit isdyne/cm2
9.3.1Types of stress
There are three types of stress
depending upon which parameter of
the body changes.1. Longitudinal stress
When a deforming force is appliednormal to the body, then therestoring force per unit area is callednormal stress.It can be divided into two types -
a)Tensile stress
When a deforming force is applied on
a body such that there is increase in
length of body, then restoring force
per unit area is called tensile stress. b)Compressive stress
When a deforming force is appliedsuch that there is decrease in length
or compression of body, then
restoring force per unit area is called
compressive stress.
Tensile and compressive stresses aretogether calledlongitudinal stress.
Fig 9.1 Showing Longitudinal Stress
2. Tangential or Shearing stress
When a deforming force is appliedtangential to the surface of the bodyso that it produces a change in the
shape of the body without anychange in volume then the restoringforce per unit area is calledtangential stress. It is also calledshearing stress where
234

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 235/422
Physics XI
EEE Consortium
Shearing stress = Tangential Force/A
Fig 9.2 Showing Shearing Stress
3. Hydraulic or Normal stress
When a solid body undergoes changein volume without change ingeometric shape on applying forceperpendicular on every point onsurface of body then restoring forceper unit area is hydraulic stress.eg. Bubble in a water filled container.
Fig 9.3 Showing Shearing Stress
9.4 Strain
When the deforming force is applied
on a body then the ratio of change in
dimension to original dimension is
strain.Strain=
hange∈dimensionoriginaldimension
It has no units.
There are 3 types of strain
1)Longitudinal strain
When a deforming force is applied on
a body such that length changesthen ratio of change in length tooriginal length is longitudinal strain.
Longitudinal strain =) L L
2)Bulk/Volumetric strain- When a deforming force is applied ona body such that volume changes
then ratio of change in volume tooriginal volume is bulk strain.Bulk strain=V/V∆
3)Shearing strain
When a deforming force produces achange in shape of body withoutchange in volume then ratio ofchange in dimension to originaldimension is sheering strain. It ismeasured by angle of sheer.
tanθ = x/L∆
which for small angles becomesθ = x/L∆
Therefore shearing strain is also
defined as ratio of displacement of
235

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 236/422
Physics XI
EEE Consortium
surface under a tangential force to
the perpendicular distance of
displaced surface to the fixed surface.
9.5 Hooke’s Law
Within the elastic limit, the stressdeveloped is directly proportional tostrain produced in a body.
Stress ∝ strain,
Stress = (E) strain, where E is modulus of elasticity
E =stress
strain
9.5.1Types of modulus of
elasticity
1. Young’s modulus of elasticity:
within the elastic limit, the ratio of
normal stress to longitudinal strain
Y=normal stress/longitudinal strain =
F / *) L/ L =
FL * ) L
SI unit is N/m2 or pascalIf material is rod/wire, A=area of
cross-section= π r2
2. Bulk modulus:
Within the elastic limit, the ratio ofnormal stress to volumetric strain.
B=nor mal stress
volumetri strain
B= F / *
−) % /% = F%
− * ) %
-ve sign shows that with increase in
pressure, a decrease in volumeoccurs.Here F/A=P(pressure)
B=-PV/V∆
Compressibility is defined as the
reciprocal of bulk modulus
K=1/B = - V/PV∆
3. Shear modulus or Modulus ofrigidity
Within the elastic limit, ratio of
tangential/ sheering stress to
sheering strain.
G=
t angential∨s h ear stresssheeringstrain
G= F / *) x / L or
F / *tanθ
= FL
* ) x or F
*tanθ
If σs is sheering stress thenG = σs/θ
9.6 The Stress-Strain Curve
A wire is suspended vertically from arigid support by the side of a scaleand load is applied to its lower endand is increased gradually, till the wire breaks. Stress and strain is
236

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 237/422
Physics XI
EEE Consortium
noted for each load and a graph isdrawn as shown
OA-Hooke’s law, OB = elastic regionCE = plastic region, D = max. stressE = fracture point
• Part OA is a straight line showing
that stress α strain. At point A, if
load is removed the body regains
its original dimension i.e. it obeys
Hooke’s Law and point A is called
proportional limit.• Part AB-In this region, stress and
strain are not directly proportional
but still the body returns to its
original shape when load is
removed. Then the point B is called
elastic limit/yield point and
corresponding stress is yield
stress. (σ y)• Part BC- In this region, even for
small stress, the strain increases
rapidly. At the point C if load is
removed the wire will not return to
its original dimension. It takes a
new path CC’ and OC’ is called
permanent set. The deformation is
called plastic deformation.• Part CD- If stress is further
increased slowly, strain increases
more rapidly and finally at point D
it experiences max. stress called
ultimate tensile strength.• Point E - Beyond point D, body
breaks by the application of stress
and the point is called fracturepoint. If the point E is close to D,
the material is said to be brittle
and if it is away, it is called ductile.
9.7 Application of Elastic
Behaviour of Materials
1. Knowing Poisson’s ratio
Thus
237

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 238/422
Physics XI
EEE Consortium
The negative sign is put in because
the change in diameter is in oppositesense to the change in length of the wire.
2. Calculating Elastic Energy
Density
The force ‘F’ needed to stretch a wire
of length L by an amount‘l’ is given
by :F = YAl / L where A is the area of cross section of
wire and Y is the Young’s modulus.Small work done in stretching the
wire by ‘dl’ is :
dW=Fdl
dW= ∫0
l
Fdl
.’. W = ∫0
l +*ldl L =
+* L ∫
0
lldl
Or W = YAl2
2 L2
Which is stored in the wire as its
Elastic Potential Energy
.’. P.E. U =+*l L
l2 =
1
2 x F x
l
Dividing by volume of wire Al, we get
the energy density as :u = U / Al
3.Calculating thickness of the
rope used in Cranes
Cranes used for lifting and moving
heavy loads from one place to
another have a thick metal rope to
which the load is attached. The ropeis pulled up using pulleys and
motors.Suppose we want to make a crane,
which has a lifting capacity of 10
tonnes or metric tons (1 metric ton =238

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 239/422
Physics XI
EEE Consortium
1000 kg). How thick should the steel
rope be? We obviously want that the
load does not deform the rope
permanently. Therefore, theextension should not exceed the
elastic limit. We find that mild steel
has a yield strength (Sy) of about 300
× 106 Nm –2. Thus, the area of cross-section ( A) of
the rope should at least be A≥W /Sy=Mg/Sy= (104kg × 10 ms-2)/(300 × 106 Nm-2)= 3.3 × 10-4 m2
corresponding to a radius of about 1
cm for a rope of circular cross-
section. Generally a large margin of
safety (of about a factor of ten in the
load) is provided. Thus a thicker rope
of radius about 3 cm is
recommended. A single wire of this
radius would practically be a rigid
rod. So the ropes are always made of
a number of thin wires braided
together, like in pigtails, for ease in
manufacture, flexibility and strength. A bridge has to be designed such that
it can withstand the load of the
flowing traffic, the force of winds and
its own weight. Similarly, in thedesign of buildings use of beams and
columns is very common. In both the
cases, the overcoming of the problem
of bending of beam under a load is of
prime importance. The beam should
not bend too much or break.Let us consider the case of a beam
loaded at the centre and supportednear its ends as shown in figure
below.
A bar of length l, breadth b, anddepthd when loaded at the centre by a load
Wsags by an amount given byδ =W l3/(4bd3Y)
This relation can be derived using
what you have already learnt and a
little calculus. From above equation
we see that to reduce the bending for
a given load, one should use a
material with a large Young’s
modulusY. Thus, for a given material, increasing
the depthdrather than the breadth
bis more effective in reducing the
bending, since δ is proportional tod-3
and only tob-1(of course the lengthl
of the span should be as small as
possible).
4. Understanding the Shape of
Beams and Girders
239

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 240/422
Physics XI
EEE Consortium
As we see from above, on increasing
the depth, unless the load is exactly
at the right place (difficult to arrange
in a bridge with moving traffic), thedeep bar may bend. This is called
buckling. To avoid this, a common
compromise is the cross-sectional
shape shown in Figure below.
This section provides a large load
bearing surface and enough depth to
prevent bending. This shape reduces
the weight of the beam without
sacrificing the strength and hence
reduces the cost.
5. Using Pillars and Columns
Use of pillars or columns is also very
common in buildings and bridges. A
pillar with rounded ends as shown in
Fig (a) supports less load than that
with a distributed shape at the endsFig (b).
The precise design of a bridge or a
building has to take into account the
conditions under which it will
function, the cost and long period,
reliability of usable materials etc.
6. Calculating Max Height
attained by any earthen structure
on earth
The answer to the question why the
maximum height of a mountain on
earth is ~10 km can also be provided
by considering the elastic propertiesof rocks. A mountain base is not under
uniform compression and this
provides some shearing stress to the
rocks under which they can flow. The
stress due to all the material on the
top should be less than the critical
shearing stress at which the rocksflow. At the bottom of a mountain of height
h,the force per unit area due to the
weight of the mountain ishρg where
240

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 241/422
Physics XI
EEE Consortium
ρ is the density of the material of the
mountain andgis the acceleration
due to gravity. The material at the
bottom experiences this force in the vertical direction, and the sides of the
mountain are free. Therefore this is not a case of
pressure or bulk compression. There
is a shear component, approximately
hρgitself. Now the elastic limit for a
typical rock is 30 × 107 Nm-2.
Equating this tohρg with ρ=3×10
3
kgm-3 gives,hρg= 30 × 107 Nm-2 Orh=30×107 Nm-2/(3 × 103 kgm-3×10ms-2) = 10 km which is slightly more than the
height of Mt. Everest. So no structure
made of rock can ever rise beyond 10km.
Exercise
1 MARK QUESTIONS1. A wire is stretched by a force such
that its length becomes double. How
will the Young’s modulus of the wire be affected?2. How does the Young’s modulus
change with rise in temperature?
3. Which of the three modulus of
elasticity – Y, K and η is possible in
all the three states of matter (solid,
liquid and gas)?4. The Young’s modulus of steel is
much more than that for rubber. For
the same longitudinal strain, which
one will have greater stress?5. Which of the two forces –
deforming or restoring is responsible
for elastic behavior of substance?6. Define malleability of a substance.7. What are elastomers?
TWO MARKS QUESTIONS1. Distinguish ductile and brittle
substances.2. Explain why bridges are declared
unsafe after long use? THREE MARKS QUESTIONS1. Derive an expression for the elastic
potential energy of a stretched wire.2. Show that the elastic potential
energy stored per unit volume of a
stretched wire is equal to 1/2 x stress
x strain.3. Define stress and mention its
types. 4. Define strain and
mention its types.
5. Which are the different moduli ofelasticity? Define each and write
mathematical expression for each.
FIVE MARKS QUESTIONS
241

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 242/422
Physics XI
EEE Consortium
1. Draw the Stress vs Strain graph of
a metallic wire subjected to a
gradually increasing stretching
force and explain the differentregions of the graph.
2. Describe the experiment to
determine the Young’s modulus of
a metallic wire.
242

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 243/422
Physics XI
EEE Consortium
243

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 244/422
Physics XI
EEE Consortium
244

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 245/422
Physics XI
EEE Consortium
10.1 Introduction
In this chapter we will study about
the common properties of liquid and
gases in contest to their fluid
behaviour which distinguish them
from solid.In our daily life we deal with fluid in
one or more ways like breathing,
blood circulation in our veins andarteries, the envelop around the
earth surface, major constituent part
of earth surface, processes for life
occurrence in both plants and
animals are based on fluidic
behaviour. A fluid cannot resist the deforming
force, it flows under the action offorces. Its shape change continuously
as long as force act on it. This
deformation is caused by shearing
force/stress which acts tangentially
on its surface. But solid resists any
deformation force while at rest. This force may cause some
displacement but the deformationdoes not take place easily. Hence we
can say
“ A fluid is a substance which
deforms in continuous manner or
flows, when act upon by shearing
forces/stress”
But converse to this if fluid at rest which means no shearing forces act
tangentially, it must be normal to the
planes to which they are acting. This
is condition when relative velocity of
particles of fluid is zero.Let us consider an example of flow o
liquid in a pipe. At the wall of pipe
the velocity of water will be zero, velocity will increases as we move
downwards centre of pipe. But as the
boundary widen or we can say if a
fluid is a long way front boundary,
then all particles move with same
velocity and there will be no shear
forces acts as all particles have zero
relative velocity as shown infigure10.1a below.
v3>v2>v1
V1 V2
245

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 246/422
Physics XI
EEE Consortium
V3 V (max)
Figure 10.1a
In practice, flow of fluids depends
upon solid boundaries like airplanes,
cars, pipes, river channels etc.
10.2 PRESSURE: In our daily life, we deals with
pressure on many ways like fix nail in
wall, drag objects, drive vehicles, cut
fruits and vegetables, while walking,
lifting weights, etc.From all examples we conclude that
pressure depend on area of contact
on which force applied.For uniform force, we notice/observe
that less the area more will be theimpact or more the area less will be
the impact. This concept is pressure
i.e. Pressure α1
*rea for
constant/uniform force.How pressure acts on a body in a
static fluid? To know it let us
consider a small pressure –sensing
device be suspended inside a fluid –
filled vessel as shown in figure (c).
the sensor consist of a piston of area
of cross section ∆A resting against a
spring with scale in a closely fitted
cylinder.
Figure 10.2a A readout arrangement reveals that
∆F force act normal to the piston.
Hence we can define pressure on
piston from fluid as P= ∆F/ ∆A for
uniform force act over a flat area A,
we can write above equation as P =
F/A.Here we involve only magnitude of
force F not the direction as it is
uniformly distributed over every point
of the area, hence it gives same value
of pressure whatever the orientation
of sensor.Pressure is a scalar quantity. Its
dimension is ML-1 T-2. S.I unit is Nm-
2. Also named as Pascal (Pa), in the
honour of French scientist Blaise-
Pascal (1623-1662) who is known for
his contributed studies on fluidpressure. A common unit is atmosphere i.e. the
average pressure exerted by the
atmosphere at the sea level. 1 atm =
246

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 247/422
Physics XI
EEE Consortium
1.01 x 105 Pa = 760 torr = 14.7
l.b/in2. Some unit of pressure is psi
(pound per square inch).
Question 10.1: Explain why the
blood pressure in humans is greater
at the feet than at the brain. The
blood pressure in humans is greater
at the feet than at the brain.
Atmospheric pressure at a height of
about 6 km decreases to nearly half
of its value at the atmosphericthough the height of the atmosphere
is more than 100 km. Hydrostatic
pressure is a scalar quantity even
though pressure is force divided by
area. Answer: As liquid pressure is given
by the relation,
P = h ρ gIt can be inferred that pressure is
directly proportional to height.
Hence, the blood pressure in human
vessels depends on the height of the
blood column in the body. The height
of the blood column is more at the
feet than it is at the brain. Hence, the
blood pressure at the feet is more
than it is at the brain.Density of air decreases with increase
in height from the surface. At a
height of about 6 km, density
decreases to nearly half of value at
the sea level. Atmospheric pressure is
proportional to density. Hence, at a
height of 6 km from the surface, it
decreases to nearly half of its value atthe sea level. When force is applied
on a liquid, the pressure in the liquid
is transmitted in all directions.
Hence, hydrostatic pressure does not
have a fixed direction and it is a
scalar physical quantity.
Question 10.2: A 50 kg girl wearinghigh heel shoes balances on a single
heel. The heel is circular with a
diameter 1.0 cm. What is the
pressure exerted by the heel on the
horizontal floor? Answer: Mass of the girl, m = 50 kg.
Diameter of the heel, d = 1 cm = 0.01
mRadius of the heel, r Area of the heel= π (0.005)2= 7.85 × 10 –5 m2
Force exerted by the heel on the floor:F = mg= 50 × 9.8= 490 N
Pressure exerted by the heel on thefloor:= 6.24 × 106N m –2
Therefore, the pressure exerted by
the heel on the horizontal floor is
6.24 × 106 N m –2
247

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 248/422
Physics XI
EEE Consortium
Some common pressure values
Body / object Pressure(Pa)
Center of sun 2x1016
Center of earth 4x1011
Atmosphere at
sea level
1x105
Normal blood
pressure
1.6x104
Best lab vacuum 10-12
Table 10.2a
10.3 DENSITY:Property of fluid which describes
nature of fluid to find the density of
fluid at any point, we isolate a small
volume (∆V) around that point andthe mass (∆m) of fluid contained in it.
The density of fluid then,ρ= ∆m/ ∆V
Or, ,= lim
% -0
dm/d%
And Ρ = m/V, for uniform density Where m is mass and v is volume of
fluid sample. It is positive scalar
quantity. Its dimension is ML-3 T0 andS.I unit is kg-m3. Variation of density
for incompressible liquid is nearly
constant at all pressure but variable
for gases with pressure. Why?
NOTE:
1.The density of water at 4oC is 1 x
103 kg m3.
2.Relative density of any substanceis density of substance with
respect to density of water at 4oC.3.Relative density is dimensionless
positive scalar quantity.
Density of Common Fluids At 4o C
Table 10.3a
COMMONFLUID
DENSITY(kgm-3)
Blood (whole at
37oC)
1060
Ethyl Alcohol 806Mercury 13600Oil (Hydraulic) 800 Water 998
Question 10.3 The body of a man
weight is about 720 N contains 4.6 x
10-3 m3 blood. Find blood weight and
express it as a percentage of the body
weight. Answer:
a.)The mass of body of man is
m = ρ V = 1060 X 4.6 x 10-3kg = 4.87 Kg For weight of blood W = mg
= 4.87 X 9.8 = 47.73 Newton
248

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 249/422
Physics XI
EEE Consortium
b.)The percentage of body weight in
comparison to blood weight
Percentage =47.73
720 X 100
= 6.63 %
10.4 Pascal’s Principal
As pressure due to fluid increases
with depth due to weight of the fluid
above the point of observationConsider following cases
1.Open tube manometer: in this case
we are seeing that a U-tube which isopen at one end and fixed with the
chamber at other end, chamber is
closed be lid at its open end. As
pressure at point A and point B are
equal, but forces are different. At
point B pressure exerted due to
chamber, which is given as
PB = P2 --------------10.1
Similarly at point AP A = P1 + ρ g h
----------------10.2But point A and B both are at same
level so are in equilibrium conditionHence P A = PB
From equation 1 and 2 we can writeabove equation as :P2 = P1 + ρ g hP2 = P1 + ρgh.’. P2 - P1 = ρ g h
This difference in pressure exerted by
chamber at atmospheric pressure is
balanced by the pressure due to
fluid. This behavior is described byPASCAL’S Principal.
PASCAL’S PRINCIPAL: Any change in the pressure applied to
a completely enclosed fluid is
transmitted undiminished to all parts
of the portion of fluid and its enclosing
walls.NOTE: In the absence of gravity
pressure exerted by fluid of any
submerged object will be equal on all
of its part. In other word we can say
the pressure in a fluid in equilibrium
is same where.Experimental Proof of Pascal’s Law
Figure 10.4aConsider a vessel as given in above
figure with Incompressible uniform
liquid with pistons at different
249

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 250/422
Physics XI
EEE Consortium
positions. Suppose that force FD
applied on piston D. It has been
observed that equal force on area
exerted on positions A,B and C suchthat FD/AD = FB/AB = FC/AC = F A/A A This equation demonstrates that the
pressure is transmitted
undiminished in all directions as per
PASCALS Law.Question 10.4: Torricelli’s barometer
used mercury. Pascal duplicated itusing French wine of density 984
kgm –3. Determine the height of the
wine column for normal atmospheric
pressure. Answer:
Density of mercury, ρ1= 13.6 × 103
kg/m3
Height of the mercury column h1=
0.76 mDensity of French wine, ρ2 = 984
kg/m3
Height of the French wine column = Acceleration due to gravity, g = 9.8
m/s2
The pressure in both the columns is
equal, i.e.,
Now, Pressure in the mercury column= Pressure in the French wine
column
= 10.5 m.Hence, the height of the French wine
column for normal atmospheric
pressure is 10.5 m.
Question 10.5: A U-tube contains
water and methylated spirit
separated by mercury. The mercurycolumns in the two arms are in level
with 10.0 cm of water in one arm and
12.5 cm of spirit in the other. What is
the specific gravity of spirit? Answer
The given system of water, mercury,
and methylated spirit is shown as
follows:
Height of the spirit column, h1= 12.5cm = 0.125 mHeight of the water column, h2= 10
cm = 0.1 mP0 = Atmospheric pressureρ1 = Density of spirit
250

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 251/422
Physics XI
EEE Consortium
ρ2 = Density of waterPressure at point B is;
Pressure at point D is;
Pressure at points B and D is the
same.
So,
Therefore, the specific gravity of spirit
is 0.8.
10.5 Effect of Gravity
Figure 10.5aConsider a vessel filled with fluid. Let
us consider a volume element in form
of cylindrical column of mass m and
height h inside it as given in above
figure 10.5a.In the absence of gravity the pressure
exerted by liquid on each point ofcylindrical column will be equal. But
in the presence of gravity pressure
will be different.
We see that cylindrical column is at
rest i.e. it is in equilibrium state. How
it is in equilibrium state. How it is
possible? On lateral surface ofcylinder the pressure exerted by fluid
in opposite direction balance each
other i.e. cancel effect of pressure of
one another but for cross sectional
area’s at point O1 and O2, the
downward force (force exerted by
liquid column above point O1 plus
force due to gravity) is balanced bythe upward force exerted by liquid
column below point O2.Let P1 pressure exerted on area A
vertically downward on top face of the
column and P2 is the pressure
exerted on bottom face of area
vertically upward. So, under
equilibrium condition we have,∑
F!=0
P1 A + mg + P2 A = 0P2 A = P1 A + mgP2 A = P1 A + ρ V g
P2 = P1 + ,% g
*
P2 = p1 + ρ g h
Form this equation we clearly note
1.The pressure is same at all points
at same depth.
251
7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 252/422
Physics XI
EEE Consortium
2.Pressure is independent of the
shape of vessel in which object is
placed.
3.As the depth increase thedifference in pressure on object
also increase and it’s vice versa.
NOTE: This difference in pressure if P1
= Pa such that P2– Pa is called gauge
pressure at that point.
As we discussed that pressure is
unaffected by the shape of vessels or
containers, Consider three cases of
different shaped vessels filled with
same liquid to same height.Pressure experience on object of
mass m placed at the bottom of each
Vessel are same by measuring
instrument. This is example of
Hydrostatic Paradox.
10.6 ATMOSPHERIC PRESSURE
(Pa)
Just as ocean water exerts pressure
on bottom of sea, same like this
envelope of gaseous surrounds earth
atmosphere also exerts pressure due
to atmosphere is called atmosphere
pressure. At sea level the value of one
atmospheric pressure is 1.013 X 105
Pa. This amount of pressure
corresponds to 14.70 lb in-2and is
referred to as one atmosphere (atm).
10.7 Measurement of Atmospheric
Pressure [Torricelli’s Experiment]
The first experiment to measureatmospheric pressure was given by E.
Torricelli an Italian Scientist in year
1643. He filled a strong glass tube of
nearly one meter by closing its open
end with thumb in a dish containing
mercury. He observed that mercury
in the tube fall down first and then
stopped. He inclined or raise the tubehigher or lower, the vertical height of
mercury in tube above mercury level
in dish remain constant i.e. 76cm.
Torricelli explained his observation
by saying that the mercury column is
supported by the pressure of the
atmospheric air acting on the free
surface of mercury in the dish. Inother word we can say that
atmospheric pressure in dish is
balanced by 76cm of Hg in tube. The
pressure exerted by 76cm of mercury
column of tube at base is same to
that exerted by entire atmosphere
does.
10.7.1 Applications of Pascal’s Law
A) Hydraulic Lift:
Hydraulic machines like hydraulic
brakes, hydraulic lift, hydraulic press
252

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 253/422
Physics XI
EEE Consortium
etc work on the principal of Pascal’s
law. Let us look at a glance how these
machines work. In case of hydraulic
lift which is used to support or liftheavy objects.
Figure 10.6a
Above figure shows a liquid container which has two opening ends narrow
and broader fitted with pistons say A
and B when force F A is applied on
piston A of cross sectional area Aaraise another piston B. how much
force applied on piston B to lift it up.
As per Pascal’s law when height of
both columns are same then,Pa = P bSo, FB/A b = F A/AaOr, FB = (F A/Aa) x A bLet us take values for these terms
towards right side of above equation.F A= 20 N Aa = 2 x 10-2 m2
Ab = 5 x 10-1 m2
Putting above terms in aboveequation we getFB= 500N
This is much higher than F A.Hence
by applying very small force at one
end can exert huge force to lift a
heavy object without doing any extra
work.
10.7.2. Hydaulic Brakes
Figure 10.6b
In a car, trucks, cranes or any other
automobile a smooth worked brakes
system is very important in order to
avoid skidding, slipping. By proper
retarding force (frictional force) one
need an efficient braking system which help vehicle to balance itself
under such conditions. Let us see
how it works form above sketch of
such breaking system, when peddle
is pressed the lever operates. The
piston P is pressed, this pressure
transmitted to P1 and P2 as per
Pascal’s law. These pistons expandthe rim on which brakes shoe’s S1
and S2 are attached which touched
the inner rim of moving wheel and
retard the motion but the area of
253

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 254/422
Physics XI
EEE Consortium
pistons P1 andP2 are more than area
of P. So a small force applied to the
brake pedal produces a large thrust
on the wheel as P ∞ 1/A.
Question 10.8: A hydraulic
automobile lift is designed to lift cars
with a maximum mass of 3000 kg.
The area of cross-section of the
piston carrying the load is 425 cm
would the smaller piston have to
bear? Answer:The maximum mass of a car
that can be lifted, Area of cross-
section of the load -carrying piston, A
= 425 cm2 = 425 × 10–4m2= 3000 ×
9.8 = 29400 N
The maximum pressure exerted on the
load,
= 6.917 × 105 Pa
Pressure is transmitted equally in all
directions in a liquid. Therefore, the
maximum pressure that the smaller
piston would have to bear is 6.917 ×
10
5
Pa
10.8Streamline Flow
The fluid in motion is known as fluid
dynamics. Flow of fluids is of various
types, we come to that later on. The
flow of liquid we see is very smooth
somewhere, violent and very fast
specially flow of water in river. The
nature of fluid, physical conditions ofmedium through which it passes also
play vital role for the motion of fluid.
The flow of liquid is said to be
streamline flow if flow of liquid is
steady in nature what is this steady
flow? In such flow the particle
passing through one particular point
has same velocity, means it is a pointthrough which when each particle of
medium passes will attain same
velocity, which doesn’t mean that at
other particles must have same
velocity, it may have different
velocities.
Figure 10.7a In above figure 10.7a at position 1
and 2 all particles pass through
same points will have only 10m/s
and 5m/s velocity. Such path taken by the fluid/particle under a steady
flow is termed as streamline. A streamline is a line drawn in the
fluid such that a tangent to the
254

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 255/422
Physics XI
EEE Consortium
streamline at any point is parallel to
the fluid velocity at that point. Two streamline never cross each
other if it is so then velocity atcrossing point would change from
moment to moment it is condition
that does not exist in steady flow.
10.8 (a)Equation Of Continuity:
Have you ever observed that when
we use our thumb/finger to control
over the velocity of fluid by reducing
the area of cross section, but the
volume of liquid flow out before and
after remain same. This behavior of
fluid is described by equation of
continuity.If fluid enters at some x kgs-1 then it
must have leave at same rate
whatever be the area of cross section
of inlet or outlet point is. This floe
through tube is termed as mass flow
rate.
Figure 10.7aConsider a pipe/tube in which
incompressible fluid (uniformly
distribution molecules) flow as given
in above figure 10.7a. During same
interval of time the distance covered
by fluid section P and Q is V2∆t and
V1∆t respectively. Also the volumeflow in this time period is
At point P:
V2 = A2 v2∆t At point Q:
V1= A1 v1∆tHence the mass of fluid will be;
At point P;
∆m2 = V2∆X2
Or, ∆m2 = ρ2 A2 v2∆t Also at point Q;
∆m1 = V1∆X1Or, ∆m1 = ρ1 A1 v1∆t And the rate of floe of mass will be At point P;
∆m2/∆t = ρ2 A2 v2 At point Q;
∆m1/∆t = ρ1 A1 v1Since no fluid can cross the sidewallsof the tube, the mass flow rates at
the positions P and Q must be equal.So,∆m1/∆t = ∆m2/∆tρ1 A1 v1= = ρ2 A2 v2For incompressible fluid the density
of fluid are same i.e. ρ1 = ρ2.
So, above equation becomes A1 v1= A1 v1 This is equation of continuity which
proves that volume of fluid per
second at both tends for an
incompressible fluid will be same
255

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 256/422
Physics XI
EEE Consortium
irrespective of the area of cross -
section of the tube. It also prove that
mass is conservative (neither created
nor be destroyed) as it flow along atube.
Question 10.6 The cylindrical tube
of a spray pump has a cross 40 fine
holes each of diameter 1.0 mm. If the
liquid flow inside the tube is 1.5 m
min. what is the speed of ejection of
the liquid through the holes? Answer :
Area of cross-section of the spray
pump,Number of holes,n= 40Diameter of each hole,d= 1 mm = 1
× 10 –3 mRadius of each hole,r=d/2 =0.5×10 –
3m
Area of cross-section of each hole, Total area of 40 holes, A2 =n= 40 × π (0.5 × 10–3)2m2
= 31.41 × 10 –6m2
Speed of flow of liquid inside the
tube,Speed of ejection of liquid through
the holes = v2 According to the law of continuity, we
have:
= 0.633 m/s Therefore, the speed of ejection of the
liquid through the holes is 0.633 m/s
10.8(b)Bernoulli’s Equation :
In 1738 Daniel Bernoulli (1700-1782)
formulated the famous equation for
fluid flow that bears his name. The
Bernoulli Equation is a statement
derived from conservation of energy
and work-energy ideas that come
from Newton's Laws of Motion. An important and highly useful
special case is where friction is
ignored and the fluid is
incompressible. This is not as unduly
restrictive as it might first seem. The
absence of friction means that the
fluid flow is steady. That is, the fluid
does not stick to the pipe sides and
has no turbulence. Most common
liquids such as water are nearly
incompressible, which meets the
second condition.Consider the case of water flowing
though a smooth pipe. Such a
situation is depicted in the figure
below. We will use this as our
working model and obtain Bernoulli'sequation employing the work-energy
theorem and energy conservation. The phenomenon described by
Bernoulli's principle has many
256

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 257/422
Physics XI
EEE Consortium
practical applications; it is employed
in the carburettor and the atomizer,
in which air is the moving fluid, and
in the aspirator, in which water is themoving fluid. In the first two devices
air moving through a tube passes
through a constriction, which causes
an increase in speed and a
corresponding reduction in pressure.
As a result, liquid is forced up into
the air stream (through a narrowtube that leads from the body of the
liquid to the constriction) by the
greater atmospheric pressure on the
surface of the liquid. In the aspirator
air is drawn into a stream of water as
the water flows through a
constriction. Bernoulli's principle can
be explained in terms of the law ofconservation of energy.
As a fluid moves from a wider pipe
into a narrower pipe or a
constriction, a corresponding volume
must move a greater distance forward
in the narrower pipe and thus have a
greater speed.
At the same time, the work done by
corresponding volumes in the wider
and narrower pipes will be expressed
by the product of the pressure and
the volume. Since the speed is
greater in the narrower pipe, the
kinetic energy of that volume is
greater.
Then, by the law of conservation of
energy, this increase in kinetic energy
must be balanced by a decrease in
the pressure-volume product, or,
since the volumes are equal, by a
decrease in pressure.10.8(c) Proof of Bernoulli’s
Equation
257

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 258/422
Physics XI
EEE Consortium
10.8(d) Venturimeter:
Venturimeter is a device used for
measuring the rate of flow of a fluid
through a pipe. The basic principle
on which a venturimeter works isthat by reducing the cross sectional
area of the flow of passage, a
pressure difference is created and the
measurement of the pressure
difference enables the determination
of the discharge through a pipe. The
inlet section of the venturimeter is of
the same diameter as that of thepipe, which is followed by a
convergent cone. The convergent cone
is a short pipe, which tapers from the
original size of the pipe to that of the
throat of the venturimeter. The throat
of the venturimeter is a short
parallel-sided tube having uniform
cross sectional area smaller thanthat of the pipe. The divergent cone of
the venturimeter is a gradually
diverging pipe with its cross sectional
area increasing from
that of the throat to the original size
of the pipe. At the inlet section and at
the throat, (i.e., section 1 and 2)258

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 259/422
Physics XI
EEE Consortium
pressure taps are provided to
measure the pressure difference. By
applying the Bernoulli equation to
the inlet section and at the throat,(i.e., section 1 and 2) an expression
for the discharge is obtained. Water is
allowed to flow through the meter at
different rates ranging from zero to
the maximum and the corresponding
pressure differences shown in the
manometer are noted. The actual
discharge A is determined using themeasuring tank and the stop watch.
Applying Bernoulli along the
streamline from point 1 to point 2 inthe narrowthroatof the Venturimeter
we have
By the using the continuity equation
we can eliminate the velocityu2,
Substituting this into and
rearranging the Bernoulli equation
we get
To get the theoretical discharge this
is multiplied by the area. To get the
actual discharge taking in to account
the losses due to friction, we include
a coefficient of discharge
This can also be expressed in terms
of the manometer readings
Thus the discharge can be expressed
in terms of the manometer reading.
Notice how this expression does not
include any terms for the elevation or
orientation (z1 or z2) of the
Venturimeter. This means that the
meter can be at any convenient angle
to function.
259

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 260/422
Physics XI
EEE Consortium
10.8(e) Torricelli’s Theorem:
The word efflux means fluid out flow.
Torricelli discovered that speed of
efflux from an open tank is given by a
formula identical to that of a freely
falling body.Consider a tank containing a liquid
of density r with a small hole in its
side at a height Y1 from the bottom.
The air above the liquid is at height
Y2 is at a pressure P. From the
equation of continuity weHave v1 A1 =v2 A2Now A2 > > A1 , v2 » 0
i.e the fluid to be approximately atrest at the top.Now applying Bernoulli’s equation at
points 1 and 2 & noting that at the
whole P1 = Pa, the atmospheric
pressure we have
Take Y2- Y1 = h then v1 = √2g h+
2( (− (a) ,
If the tank is open to atmosphere
than P = Pa
Then v1 = √ 2gh
This is known as Torricelli’s law
10.9 Viscosity
Viscosity is an internal property of a
fluid that offers resistance to flow.For liquids, it corresponds to the
informal concept of "thickness".For example,honey has a much
higher viscosity than water. Viscosity is a property arising
fromfriction between neighbouring
particles in a fluid that are moving at
different velocities. When the fluid is forced through a
tube, the particles which comprise
the fluid generally move faster near
the tube's axis and more slowly near
its walls: therefore somestress, is
needed to overcome the friction
between particle layers and keep the
fluid moving. For the same velocity
pattern, the stress required is
proportional to the fluid's viscosity.
Figure 10.9a
260

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 261/422
Physics XI
EEE Consortium
Thedynamic (shear) viscosity of a
fluid expresses its resistance to
shearing flows, where adjacent layers
move parallel to each other withdifferent speeds.It can be defined through the
idealized situation known as
aCouette flow, where a layer of fluid
is trapped between two horizontal
plates, one fixed and one moving
horizontally at constant speed .
If the speed of the top plate is smallenough, the fluid particles will
moveparallel to it, and their speed
will varylinearly from zero at the
bottom to at the top. Each layer of
fluid will move faster than the one
just below it, and friction between
them will give rise to aforce resisting
their relative motion. In particular,the fluid will apply on the top plate a
force in the direction opposite to its
motion, and an equal but opposite
one to the bottom plate. An external force is therefore required
in order to keep the top plate moving
at constant speed.
The magnitude of this force is found
to be proportional to the speed and
the area of each plate, and inversely
proportional to their separation :
TheSI unit of dynamic viscosity is
thePascal-second (Pa·s), (equivalent
to (N·s)/m2, or kg/(m·s)). If
afluid with a viscosity of one Pa·s is
placed between two plates, and one
plate is pushed sideways with ashear
stress of onePascal, it moves a
distance equal to the thickness of the
layer between the plates in
onesecond. Water at 20 °C has a
viscosity of 0.001002 Pa·s, while a
typical motor oil could have a
viscosity of about 0.250 Pa·s. Thecgs physical unit for dynamic
viscosity is the poise (P), named
after Jean Leonard Marie Poiseuille.It is more commonly expressed
ascentipoise (cP). Water at 20 °C has
a viscosity of 1.0020 cP.1 P = 0.1 Pa·s,1 cP = 1 m Pa·s = 0.001 Pa·s = 0.001
N·s/m2.
10.10 STOKE’S LAW:
In 1851,George Gabriel
Stokes derived an expression, now
known asStokes' law, for thefrictional force – also calleddrag
force – exerted onspherical objects
with very smallReynolds
numbers (e.g., very small particles) in
261

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 262/422
Physics XI
EEE Consortium
a continuous viscous fluid. Stokes'
law is derived by solving theStokes
flow limit for small Reynolds numbers
of theNavier–Stokes equations:
WhereFd is the frictional force –
known asStokes' drag – acting on
the interface between the fluid and
the particle (inN),μ is thedynamic
viscosity (kg /m*s),R is the radius of
the spherical object (in m), andv is
the particle's velocity (in m/s).Stokes' law makes the following
assumptions for the behaviour of a
particle in a fluid:• Laminar Flow• Spherical particles• Homogeneous (uniform in
composition) material• Smooth surfaces
• Particles do not interfere witheach other.
Figure 10.10a
Stokes's law is the basis of thefalling-sphere viscometer, in which
the fluid is stationary in a vertical
glass tube. A sphere of known size
and density is allowed to descend
through the liquid as shown in above
figure 10.10a.If correctly selected, it reaches
terminal velocity, which can bemeasured by the time it takes to pass
two marks on the tube. At terminal (or settling) velocity, the
excess forceFg due to the difference
of the weight of the sphere and
the buoyancy on the sphere, (both
caused bygravity :
With ρ p and ρ f themass density of
the sphere and the fluid, respectively,
andg thegravitational acceleration.
Demanding force balance:Fd =Fg and
solving for the velocityV gives the
terminal velocityVs.Note that since buoyant force
increases asR and Stokes dragincreases asR, the terminal velocity
increases asR and thus varies
greatly with particle size as shown
below. If the particle is falling in the
viscous fluid under its own weight
due togravity, then aterminal
velocity, or settling velocity, is
reached when this frictional forcecombined with the buoyant
force exactly balances
thegravitational force. The resulting terminal velocity (or
settling velocity) is given by:262

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 263/422
Physics XI
EEE Consortium
wherevs is the particle's settling
velocity (m/s) (vertically downwards
if ρ p > ρ f upwards if ρ p < ρ f ) g isthegravitational acceleration (m/s2)
ρ p is themass density of the particles
(kg/m3), ρ f is the mass density of the
fluid (kg/m3) andμ is thedynamic
viscosity (kg /m*s).
10.11 Reynold’s Number:
Influid mechanics, theReynolds
number (Re) is adimensionless
quantity that is used to help predict
similar flow patterns in different fluid
flow situations. The concept was
introduced byGeorge Gabriel
Stokes in 1851, but the Reynolds
number is named afterOsborneReynolds (1842–1912), who
popularized its use in 1883. The Reynolds number is defined as
theratio of inertial forces
to viscous forces and consequently
quantifies the relative importance of
these two types of forces for given
flow conditions.Reynolds numbers frequently arise
when performing scaling of fluid
dynamics problems, and as such can
be used to determinedynamic
similitude between two different
cases of fluid flow.
The Reynolds number is defined below for each case.
Where:• is the mean velocity of the
object relative to the fluid (SI
units: m/s)• is a characteristic linear
dimension (m).• is thedynamic viscosity of
thefluid (Pa·s or N·s/m² or kg/
(m·s))• is thekinematic viscosity (
) (m²/s)• is thedensity of the fluid
(kg/m³).Reynolds number, in fluid
mechanics, a criterion of whetherfluid (liquid or gas) flow is absolutely
steady (streamlined, orlaminar) or on
the average steady with small
unsteady fluctuations (turbulent). Whenever the Reynolds number is
less than about 2,000, flow in a pipe
is generally laminar, whereas, at
values greater than 2,000, flow isusually turbulent. Actually, the transition between
laminar and turbulent flow occurs
not at a specific value of the Reynolds
263

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 264/422
Physics XI
EEE Consortium
number but in a range usually
beginning between 1,000 to 2,000
and extending upward to between
3,000 and 5,000.
Question 10.6: Glycerine flows
steadily through a horizontal tube of
length 1.5 m and radius 1.0 cm. If
the amount of glycerine collected per
second at one end is 4.0 × 10-3 kg m –3
pressure difference between the two
ends of the tube? (Density ofglycerine = 1.3 × 103 kg m –3 and
viscosity of glycerine = 0.83 Pa s).
[You may also like to check if the
assumption of laminar flow in the
tube is correct]. Answer:
Length of the horizontal tube,Radius of the tube, r = 1 cm = 0.01 mDiameter of the tube, d = 2r = 0.02 mGlycerine is flowing at a rate of
4.0×10 kg s –1
M = 4.0 × 10 –3 kg s –1
Density of glycerine, ρ = 1.3 × 10 kg
m –3
Viscosity of glycerine, η = 0.83 Pa s Volume of glycerine flowing per sec:
= 10 –3 kg s –1.
According to Poiseville’s formula, we
have the relation for the rate of flow:
Where, p is the pressure difference
between the two ends of the tube
= 9.8 × 102 PaReynolds’ number is given by the
relation:
Reynolds’ number is about 0.3.
Hence, the flow is laminar.
10.12 Dynamic Lift:
Afluid flowing past the surface of a
body exerts aforce on it.Lift is the
component of this force that
isperpendicular to theoncoming flow
direction.It contrasts with thedrag force,
which is the component of thesurface forceparallel to the flow
direction. If the fluid is air, the force
is called anaerodynamic force.
264

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 265/422
Physics XI
EEE Consortium
In water, it is called ahydrodynamic
force. Lift is most commonly
associated with the wing of afixed-
wing aircraft, although lift is alsogenerated
bypropellers kites,helicopter, rotors,
rudders,sails andkeels onsailboats,hydro-foils, wings onauto racing cars
wind turbines, and other streamlined
objects. When an aircraft isclimbing
descendingor banking in a turn thelift is tilted with respect to the
vertical. Lift may also be entirely
downwards in someaerobatic
maneuvers, or on the wing on a
racing car. In this last case, the
termdown force is often used. Aerodynamic lift is distinguished
from other kinds of lift in fluids.
Aerodynamic lift requires relative
motion of the fluid which
distinguishes it fromaerostatic lift
or buoyancy lift as used by balloons,
blimps, and dirigibles. Aerodynamic lift usually refers to
situations in which the body is
completely immersed in the fluid, and
is thus distinguished fromplanning
lift as used by motorboats,
surfboards, and water-skis, in which
only a lower portion of the body is
immersed in the lifting fluid flow.
Figure10.11a
Figure 10.11b
Movement of object from its original
path is due to Magnus effect as
depict in figure 10.11a. TheMagnus
effect is the commonly observed
effect in which a spinning ball (orcylinder) curves away from its
principal flight path. It is important
in many ball sports. Under the
Magnus effect, top spin produces a
downward swerve of a moving ball,
greater than would be produced by
gravity alone, and back spin has the
opposite effect.
10.11(a) Blood And Heart Attack:
Bernoulli’s principle says that the
sum of potential, kinetic and
pressure energy per unit mass of a265

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 266/422
Physics XI
EEE Consortium
incompressible, non viscous fluid
remains constant. Bernoulli’s
principle helps in explaining blood
flow in artery. The artery may get constricted due to
the accumulation of plaque on its
inner walls. In order to drive the
blood through this constriction a
greater demand is placed on the
activity of the heart. The speed of the flow of the blood in
this region is raised which lowers thepressure inside and the artery may
collapse due to the external pressure.
The heart exerts further pressure to
open this artery and forces the blood
through. As the blood rushes through the
opening, the internal pressure once
again drops due to same reasons
leading to a repeat collapse. This may
result in heart attack. Question 10.11a; What is the largest
average velocity of blood flow in an
artery of radius 2 × 10-1 mm flow
must remain laminar? (b) What is the
corresponding flow rate? (Take
viscosity of blood to be 2.084 × 10 –3
Pa s). Answer
(a)Radius of the artery,r= 2 × 10 mDiameter of the artery,d= 4 × 10 – 3m
Viscosity of blood,
Density of blood, ρ= 1.06 × 103
kg/m3
Reynolds’ number for laminar flow,
NR = 2000 The largest average velocity of blood
is given by the relation:
Therefore, the largest average velocity
of blood is 0.983 m/s. Flow rate is
given by the relation:R= πr2 vavg
Therefore, the corresponding flow
rate is=
10.12 Surface Energy and Surface
Tension:
Thesurface energy is defined as the
sum of all intermolecular forces that
are on the surface of a material, the
degree of attraction or repulsion force
of a material surface exerts on
another material.Surface energy, orinterface
energy, quantifies the disruption of266

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 267/422
Physics XI
EEE Consortium
intermolecular bonds that occur
when a surface is created.In thephysics ofsolids, surfaces
must be intrinsically lessenergetically favorable than the bulk
of a material (the molecules on the
surface have more energy compared
with the molecules in the bulk of the
material), otherwise there would be a
driving force for surfaces to be
created, removing the bulk of the
material. The surface energy may therefore be
defined as the excess energy at the
surface of a material compared to the
bulk. In the case of liquids this same
definition is applied to define the
surface tension as a result of this
surface tension liquid with low
surface tends to contract and formdroplets.Surface tension can be defined as the
resistance of a fluid to deform or
break, such resistance is defined
directly by the intermolecular forces
that are on the surface.
Figure 10.12a
When the substrate has a high
surface energy, i.e. it tends to attract,
and the adhesive has a low surface
tension, has little resistance to
deformation or rupture, a good
wetting of the adhesive on the
substrate is produced as shown in
figure 10.12a above. For example,
silicone adhesives have a low surface
tension; this is the main reason why
these adhesive bond on a wide range
of substrates.On the other hand, those substrates
which contain silicone surfaces havea low surface energy and because of
this reason, they are very difficult to
get a good wet ability and a good
adhesion with any material unless
267

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 268/422
Physics XI
EEE Consortium
you do a surface treatment to remove
the silicone and increase surface
energy of the substrate surface.
10.12(a) Angle Of Contact
Thecontact angle is the angle,
conventionally measured through the
liquid, where
aliquid/ vapour interface meets
asolid surface. It quantifies the wet
ability of a solid surface by a liquid
via the Young equation. A given
system of solid, liquid, and vapour at
a given temperature and pressure
has a unique equilibrium contact
angle. However, in practicecontact
angle hysteresis is observed, ranging
from the so-called advancing(maximal) contact angle to the
receding (minimal) contact angle. The equilibrium contact is within
those values, and can becalculated
from them. The equilibrium contact
angle reflects the relative strength of
the liquid, solid, and
vapourmolecular interaction.
Figure10.12a
Figure 10.12b
The theoretical description of contact
arises from the consideration of
athermodynamic equilibrium betwee
n the threephases: theliquid phase
(L), thesolid phase (S), and the
gas/ vapour phase (G) (which could
be a mixture of ambient atmosphereand an equilibrium concentration of
the liquid vapour). The “gaseous” phase could also be
another (immiscible) liquid phase. If
the solid–vapourinterfacial energy is
denoted by , the solid–liquid
interfacial energy by , and the
liquid–vapour interfacial energy (i.e.
thesurface tension) by , then the
equilibrium contact angle is
determined from these quantities
by Young's Equation:
268

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 269/422
Physics XI
EEE Consortium
10.13 Drops and Bubbles
The fact that air has to be blown into
a drop of soap solution to make a
bubble should suggest that the
pressure within the bubble is greater
than that outside. This is in fact the
case: this excess pressure creates a
force that is just balanced by the
inward pull of the soap film of the
bubble due to its surface tension.
Figure10.13a
Consider a soap bubble of radius r as
shown in Figure 10.13a. Let the
external pressure be Po and the
internal pressure P1. The excess pressure P within the
bubble is therefore given by:Excess pressure (P) = P0 -P1
Consider the left-hand half of the bubble. The force acting from right to
left due to the internal excess
pressure can be shown to be PA,
where A is the area of a section
through the centre of the bubble. If
the bubble is in equilibrium this
force is balanced by a force due to
surface tension acting from left to
right. This force is 2 x 2πrT (the factor of 2
is necessary because the soap film
has two sides) where T is the
coefficient of surface tension of the
soap film. Therefore2 x 2πr T = PA = Pπr2 giving:Excess pressure in a soap bubble(P) = 4T/r A bubble of air within a liquid hasonly one liquid-air surface and the
excess pressure within such a bubble
is simply:
Excess pressure in an air bubble(P) = 2T/rBoth these formulae show that the
excess pressure within a small
bubble is greater than that withinlarger bubble.
Bubble diameter
(2r) (µm)
((Pa
)
(at
m)
1000 286 0.002823.0 95800 0.9480.3 958000 9.477
Table 10.13a
Question 10.12a:Figure 10.24 (a) shows a thin liquid
film supporting a small weight = 4.5
269

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 270/422
Physics XI
EEE Consortium
× 10-2N. What is the weight
supported by a film of the same
liquid at the same temperature in
Fig. (b) and (c)? Explain your answerphysically.
Answer: Take case (a): The length of the liquid film
supported by the weight, The weight supported by the film, A liquid film has two free surfaces.
∴ Surface tension
In all the three figures, the liquid is
the same. Temperature is also the
same for each case.Hence, the surface tension in figure
(b) and figure (c) is the same as in
figure (a), i.e., 5.625 × 10 –2 N m –1.
Since the length of the film in all the
cases is 40 cm, the weight supported
in each case is 4.5 × 10 –2 N.
10.14 Capillary Rise
Capillary action (sometimes
capillarity capillary motion,
or wicking ) is the ability of
aliquid to flow in narrow spaces
without the assistance of, and in
opposition to external forceslikegravity. The effect can be seen in
the drawing up of liquids between the
hairs of a paint-brush, in a thin tube,
in porous materials such as paper, in
some non-porous materials such as
liquefiedcarbon fiber, or in a cell. It
occurs because ofintermolecular
forces between the liquid andsurrounding solid surfaces. If the
diameter of the tube is sufficiently
small, then the combination
ofsurface tension (which is caused
bycohesion within the liquid)
andadhesive forces between the
liquid and container act to lift the
liquid. In short, the capillary actionis due to the pressure of cohesion
and adhesion which cause the liquid
to work against gravity. A common
apparatus used to demonstrate the
first phenomenon is thecapillary
tube. Adhesion occurs between the
fluid and the solid inner wall pulling
the liquid column up until there is asufficient mass of liquid
forgravitational forces to overcome
these intermolecular forces. The
contact length (around the edge)
270

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 271/422
Physics XI
EEE Consortium
between the top of the liquid column
and the tube is proportional to the
diameter of the tube, while the weight
of the liquid column is proportionalto the square of the tube's diameter.
So, a narrow tube will draw a liquid
column higher than a wider tube will.
Figure 10.14aLet the radius of the glass capillary
tube be r, the coefficient of surface
tension of the liquid he T, the density
of the liquid be ρ, the angle of
contact between the liquid and the
walls of the tube be θ and the height
to which the liquid rises in the tube
be h.Consider the circumference of the
liquid surface where it meets the
glass. Along this line the vertical
component of the surface tension
force will be 2πr cosθ T
This will draw the liquid up the tubeuntil this force by the downward force
due to the column of liquid of height
h, that is just balanced at
equilibrium:
Therefore,
2πr cosθ T = πr2ρgh which gives capillary rise
h = 2Tcosθ/ rρg
This for an angle of contact of
0o becomes:Capillary rise (h) = 2T / rρg
We will assume that if the radius of
the tube is small the shape of the
liquid surface is very nearly
hemispherical.
The pressure at A must beatmospheric, but since A is within a
hemispherical surface the pressure
at B must be less than A by an
amount 2T/r. The pressure at C is also
atmospheric but it is greater than the
pressure at B by the hydrostatic
pressure hρg. Therefore atequilibrium we have : h = 2T/rρgBoth these methods show that the
rise is greater in tubes with a narrow
bore and for zero angles of contact.In fact when the coefficient of surface
tension is measured by capillary rise
in the laboratory the values obtained
are nearly always too small becauseof the difficulty of getting perfectly
clean apparatus.
The angle of contact can rarely be
made zero.271

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 272/422
Physics XI
EEE Consortium
10.15 Detergent And Surface
Tension
Molecules of most detergents and
soaps are long chain hydrocarbonmolecules with an ionic group at one
end, usually carrying a negative
charge, thus making it an anion. This
charge is balanced by the opposite
charge of a soluble cation, for
example Na+. The long hydrocarbon
chains do not interact well with water
molecules, and many of them areeffectively ‘squeezed out’ to the
interfaces between the water and the
air or the glass sides of the beaker.
The effect of these molecules on the
water surface is to considerably
weaken the forces between water
molecules there, thus lowering the
surface tension.
Figure 10.15a
When the drop of detergent is added
to the powdered surface, the initial
effect is to draw the powder back to
the edges very rapidly as thedetergent molecules form their own
surface layer with a lower surface
tension than the water. As the
detergent gradually mixes with the
water, the powder begins to sink, and
a needle will now pass through the
surface with ease under its own
weight. However, if lycopodiumpowder is used, which is less dense
than water, it remains at the edges.
Other powders may clump into
nodules if they are not wetted by the
detergent solution. In hard water
there is a significant concentration of
calcium, Ca2+, and/or magnesium,
Mg2+ cations. These cations form aninsoluble compound with soap
anions, so instead of forming a
surface layer, they are precipitated
out, leaving the surface tension little
changed.2/\/\/\/\/\/\/COO−(aq) + Ca2+
(aq) →
(/\/\/\/\/\/\/COO)2Ca(s)
However, the calcium and
magnesium salts of many detergent
molecules are soluble, so detergents
272

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 273/422
Physics XI
EEE Consortium
still lower the surface tension of hard
water.
273

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 274/422
Physics XI
EEE Consortium
11.1Introduction:
Typically temperature may be defined
as• The degree of hotness or
coldness of a body or
environment.• A measure of the warmth or
coldness of an object or substance
with reference to some standard
value.• A measure of the average
kinetic energy of the particles in a
sample of matter, expressed in
terms of units or degrees
designated on a standard scale.• Any of various standardized
numerical measures of this ability,such as the Kelvin, Fahrenheit,
and Celsius scale• Temperature is a measure of
the ability of a substance, or more
generally of any physical system,
to transfer heat energy to another
physical system
On the other hand heat is the energy
present in a substance. If two bodies
at different temperatures are brought
in contact with each other then heat
274

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 275/422
Physics XI
EEE Consortium
energy flows from the body at higher
temperature to the body at lower
temperature.
While temperature is measured in
kelvin (S.I units), heat energy is
measured in joule (S.I units). While
temperature of a substance is the
average kinetic energy of its
molecules, heat energy present in it
is the sum total of the kinetic energy
and potential energy present in it.
11.2Measurement of temperature
Many methods have been developed
for measuring temperature. Most of
these rely on measuring some
physical property of a working
material that varies with
temperature.One of the most common devices for
measuring temperature is theglass
thermometer.E.g.(a) Expansion of liquid with
temperature: Mercury or alcohol
thermometer(b) Increase in resistance with
increase in temperature: Thermistor(c) Measurement of heat radiation:
Pyrometers
The scales of temperature are• Celsius scale
• Fahrenheit scale• Kelvin scale
275

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 276/422
Physics XI
EEE Consortium
C = (9/5)(F-32) = K-273
11.3Ideal gas equation
The ideal gas law is theequation of
state of a hypotheticalideal gas. It is
a good approximation to the behaviour of manygasesunder many
conditions, although it has several
limitations. It was first stated
byÉmile Clapeyron in 1834 as a
combination ofBoyle's
law andCharles's law. The ideal gas
law is often introduced in its common
form:
whereP is thepressure of the
gas,V is the volume of the gas,n is
theamount of substance of gas
(measured inmoles),R is the ideal,
or universal,gas constant, andT is
thetemperature of the gas.It can also be derived microscopically
fromkinetic theory, as was achieved
(apparently independently) by August
Krönig in 1856 andRudolf
Clausius in 1857.
The above graph shows that for all
gases the pressure i.e. intermolecular
forces becomes zero at -273.150C or 0
K. This temperature is called
absolute zero.
11.4 Thermal expansion:
Thermal expansion is the tendency of
matter to change in volume in276

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 277/422
Physics XI
EEE Consortium
response to a change in
temperature throughheat transfer. When a solid has prominent linear
dimensions like a wire then theincrease in volume is manifested in
the form of linear expansion and
when a solid has prominent
superficial dimensions like a sheet
then the increase in volume is
manifested in the form of superficial
expansion. Temperature is a
monotonic function of the averagemolecular kinetic energy of a
substance. When a substance is heated, the
kinetic energy of its molecules
increases. Thus, the molecules begin
moving more and usually maintain a
greater average separation. Materials
which contract with increasingtemperature are unusual; this effect
is limited in size, and only occurs
within limited temperature ranges
(see examples below). The degree of
expansion divided by the change in
temperature is called the
material's coefficient of thermal
expansion and generally varies withtemperature.
11.4.1Factors affecting thermal
expansion
Unlike gases or liquids, solid
materials tend to keep their shape
when undergoing thermal expansion.
Thermal expansion generallydecreases with
increasing bond energy, which also
has an effect on themelting point of
solids, so, high melting point
materials are more likely to have
lower thermal expansion. In general,
liquids expand slightly more than
solids. The thermal expansion of glasses is
higher compared to that of
crystals. At the glass transition
temperature, rearrangements that
occur in an amorphous material lead
to characteristic discontinuities of
coefficient of thermal expansion or
specific heat. These discontinuities allow detection
of the glass transition temperature
where a super-cooled liquid
transforms to a glass. Absorption or desorption of water (or
other solvents) can change the size of
many common materials; many
organic materials change size muchmore due to this effect than they do
to thermal expansion. Common
plastics exposed to water can, in the
long term, expand by many percent.
277

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 278/422
Physics XI
EEE Consortium
11.4.2 Coefficient of thermal
expansion
The coefficient of thermal expansion
describes how the size of an objectchanges with a change in
temperature. Specifically, it measures
the fractional change in size per
degree change in temperature at a
constant pressure.Several types of coefficients have
been developed: volumetric, area, and
linear which are used depending onthe particular application and which
dimensions are considered
important. For solids, one might only
be concerned with the change along a
length, or over some area.
The volumetric thermal expansion
coefficient is the most basic thermalexpansion coefficient. In general,
substances expand or contract when
their temperature changes, with
expansion or contraction occurring in
all directions. Substances that
expand at the same rate in every
direction are calledisotropic.
For isotropic materials, the area and
linear coefficients may be calculated
from the volumetric coefficient by
taking the square root or cubic root
of volume thermal expansion
coefficient. Mathematical definitions
of these coefficients are defined below
for solids, liquids, and gases.
11.4.2.1 General volumetricthermal expansion coefficient:
In the general case of a gas, liquid, or
solid, the volumetric coefficient of
thermal expansion is given by γ = (V/V T)∆ ∆ P
The subscript p indicates that the
pressure is held constant during the
expansion, and the subscript "V"
stresses that it is the volumetric (not
linear) expansion that enters this
general definition. In the case of a
gas, the fact that the pressure is held
constant is important, because the
volume of a gas will vary appreciably
with pressure as well as temperature.
For a gas of low density this can be
seen from theideal gas law.
11.4.2.2 General superficial
thermal expansion coefficient:
The area thermal expansion
coefficient relates the change in amaterial's area dimensions to a
change in temperature. It is the
fractional change in area per degree
278

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 279/422
Physics XI
EEE Consortium
of temperature change. Ignoring
pressure, we may write:β = (A/A T)∆ ∆ P
11.4.2.3 General linear thermal
expansion coefficient
To a first approximation, the change
in length measurements of an object
("linear dimension" as opposed to,
e.g., volumetric dimension) due to
thermal expansion is related totemperature change by a "linear
expansion coefficient". It is the
fractional change in length per degree
of temperature change. Assuming
negligible effect of pressure, we may
write: = (l/lT)∆ ∆ P
It is seen that =β/2 = γ/3
11.4.2.4 Effects on strain:
For solid materials with a significant
length, like rods or cables, an
estimate of the amount of thermal
expansion can be described by the
materialstrain, given by and
defined as:
thermal =∆l/l where∆l is the change in length
before the change of length andl is
the original length. For most solids,
thermal expansion is proportional to
the change in temperature:
Thus, the change in either
thestrain or temperature can be
estimated by: thermal = T∆
Where,
is the difference of the temperature
between the two recorded strains,
measured indegrees
Celsius orKelvin, and is thelinear coefficient of thermal
expansion in "per degree Celsius" or
"per Kelvin", denoted by °C−1 or K−1,
respectively. In the field of continuum
mechanics, the thermal expansion
and its effects are treated aseigen
strain and eigen stress.
11.4.5 Consequences of thermal
expansion in solids:
1. Gaps are left when laying rail
tracks: This is to cope for thermal
expansion in summers.
279

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 280/422
Physics XI
EEE Consortium
Thermal expansion of long
continuous sections of rail tracks is
the driving force forrail buckling.
This phenomenon resulted in 190train derailments during 1998 –2002
in the US alone.2. Overhead telephone cables are
kept sagging between two poles:
This is to cope for contraction of the
cables in winter.3. When you pour a hot liquid into
a thick glass tumbler, it cracks: When the hot water is poured into
the tumbler, some parts of the glass
warm up quickly (like the sides which
are thin.) These parts expand.
However, they are still attached to the
thicker parts of the glass (like the
bottom), which have not expanded.
This difference in expansion sets upstrong forces in the glass which can
break it.
11.5 Contraction effects/negative
thermal expansion / Anomalous
expansion
A number of materials contract onheating within certain temperature
ranges; this is usually callednegative
thermal expansion, rather than
"thermal contraction". For example,
the coefficient of thermal expansion
of water drops to zero as it is cooled
to 3.983 °C and then becomes
negative below this temperature; this
means that water has amaximumdensity at this
temperature, and this leads to bodies
of water maintaining this
temperature at their lower depths
during extended periods of sub-zero
weather. Also, fairly pure silicon has
a negative coefficient of thermal
expansion for temperatures betweenabout 18 and 120. Anomalous expansion of water takes
place because when water is heated
to 277K hydrogen bonds are formed.
Though ice is supposed to expand
when it is converted into water, this
gradual formation of hydrogen bonds
causes it to contract, i.e. thecontraction caused due to the
formation of hydrogen bonds is
greater than the actual expansion of
ice. At 277K water has the maximum
density because all the hydrogen
bonds are formed by 277K beyond
which water obeys the kinetic theoryof molecules, an increase in volume
when heated and the reverse when
cooled. The same thing happens in
280

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 281/422
Physics XI
EEE Consortium
the reverse when water is cooled
beyond 277K.
Graph showing variation of volume
with temperature as water is heated
from 00C
Graph showing variation of density with
temperature as water is heated from 00C
11.5.1Consequence of anomalous
expansion of water:1.Survival of aquatic life under
extreme cold conditions: The peculiar expansion of water has
an important bearing on the
preservation of aquatic life during
very cold weather. As the
temperature of a pond or lake falls,
the water contracts, becomes denserand sinks. A circulation is thus set up until all
the water reaches its maximum
density at 4° C. In due course, ice
forms on the top of the water, and
after this the lower layers of water at
4° C can lose heat only by
conduction.Only very shallow water is thus liable
to freeze solid. In deeper water there
will always be water beneath the ice
in which fish and other creatures can
live.
Survival of aquatic life under sub zero
conditions
2. Unlogged water pipes burst
under severe cold conditions:
This is due to the fact that ice
expands on freezing. Hence the
volume of the ice exceeds the volume
of the pipe and the pipe may burst.
To overcome this pipes are logged i.e.
281

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 282/422
Physics XI
EEE Consortium
covered with a heat insulator like
asbestos, glass wool of glass fibre.3. Under severe frost conditions
people in cold countries may sufferof frost bites:
The water in the veins freezes and
expands. Thus the veins burst and
the person loses sensation of limbs.
This is called frost bites.
11.6 Thermal expansion of liquids:
Liquids do not have a definite shape.
They take the shape of the container.
Thus, we can specify a liquid by its
volume. Hence, we can speak of
volume expansion only for liquids.
Expansion of liquids is much greater
than that of solids. A liquid is heated in a container. Heat
flows through the container to the
liquid. This means that the container
expands first, due to which the level
of the liquid falls. When the liquid
gets heated, it expands more and
beyond its original level. We cannot
observe the intermediate state. We
can only observe the initial and the
final levels. This observed expansion
of the liquid is known as the
apparent expansion of the liquid.If we consider the expansion of the
container also and measure the total
expansion in volume of the liquid,
then the expansion is termed as the
absolute expansion of the liquid.
Expansion of container with liquid
In the figure L1 represents the
original level at the level of the
liquid first falls to L2, because the
container gets heat first. When the liquid gets heated, it
expands much more than the
container and its level rises to L3. We can only observe the increase in
level from L1 to L3. Intermediate level
L2 goes unnoticed. The expansion we
measure is the apparent expansion of
the liquid. The corresponding
coefficient is coefficient of apparent
expansion. The coefficient of apparent expansion
is defined as the ratio of apparent
increase in volume of the liquid to its
282

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 283/422
Physics XI
EEE Consortium
original volume for every degree rise
in temperature.Coefficient of apparent expansion
If we evaluate the increase in volume
of the liquid taking into account the
expansion of the vessel also, then we
say it is absolute expansion of the
liquid. We can show that,
The coefficient of absolute expansionof a liquid = coefficient of apparent
expansion + coefficient of cubical
expansion of the material of the
container.
11.7 Specific Heat Capacity:
i. The quantity of heat given to the body is directly proportional to the
mass ‘m’ of the body and the rise in
temperature ‘T’ of the body∆
Hence Q m T∆
or Q = mcT∆
where c is the constant of
proportionality called the specific
heat capacity of the substance. Therefore c = Q/(m T)∆
If m=1 and T = 1∆
we have c = Q Thespecific heat (also called specific
heat capacity) is the amount
ofheat required to change the
temperature of unit mass (or unit
quantity, such as mole) of a
substance by one degree. Therefore, unlike theextensive
variable heat capacity, which
depends on the quantity of material,
specific heat is anintensive
variable and has units of energy per
mass per degree (or energy per
number of moles per degree).
The S.I unit of specific heat capacity
is Jkg-1K-1. The other unit is calg-10C-1.1 Jkg-1K-1= 4186 calg-10C-1
Substance ‘c’ in Jkg-1K-1
Water 4186
Wood 1700Sand 830Ice 2093Methyl Alcohol 2530Ethyl Alcohol 2440Copper 385
11.8Calorimetry:
Calorimetry is the science associated
with determining the changes inenergy of a system by measuring the
heat exchanged with the
surroundings.
283

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 284/422
Physics XI
EEE Consortium
Any process that results in heat
being generated and exchanged with
the environment is a candidate for a
calorimetric study.Hence it is not surprising to discover
that calorimetry has a very broad
range of applicability, with examples
ranging from drug design in the
pharmaceutical industry, to quality
control of process streams in the
chemical industry, and the study of
metabolic rates in biological (peopleincluded) systems. Indeed if the full
range of applications were to be
mentioned, the allocated disk space
on this site would soon be used up.
Acalorimeter is a device used to
measure heat of reaction. The principle of calorimetry states
that neglecting heat losses due to
radiation, the heat energy lost by ahot body is equal to the heat energy
gained by a cold body.
11.9Latent Heat:
Latent heat is the energy released or
absorbed by a body or
athermodynamic system during a
constant-temperature process. Atypical example is a change ofstate of
matter, meaning aphase
transition such as the melting of ice
or the boiling of water.Obviously latent heat would be of two
kinds:• Latent heat of fusion• Latent heat of vaporizationSpecific latent heat of fusion is the
heat energy required by unit mass of
a solid to completely change its state
from solid to liquid at its melting
point. The specific latent heat of
vaporization is heat energy required
by unit mass of a liquid to completely
change its state from liquid to gas at
its boiling point. The S.I unit of either is Jkg-1.
Table showing latent heat of some
substances
Substance Latent heat
of fusion
(J/kg)
Latent heat vaporisation
(J/kg)
Ethyl alcohol 108000 855000
Water 334000 2268000284

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 285/422
Physics XI
EEE Consortium
Methylalcohol98800 1100000
Silver 88000 2390000
Copper 207000 4730000
11.10Heat transfer:
Heat can be transferred through a
medium in three different ways:
11.10.1 Conduction
The transfer of energy between
objects that are in physicalcontact. Thermal conductivity is the
property of a material to conduct
heat.Heat can be conducted between two
bodies which are in contact with each
other; heat "flows" from one to the
other.
• Materials which conduct heat well are calledconductors of heat.
Electrical conductors (such as
metals) are good conductors of
heat.• Materials which do not conduct
heat well are calledinsulators.
Electrical insulators (for example,
wood or glass) are usually goodinsulators of heat. Materials with
low density, such as air or foamed
plastic, are normally also good
insulators unless they happen to
be electrical conductors. To
prevent heat from moving from
one place to another, we usually
place an insulator between.Once a good insulator becomes hot,
however, it stays that way for a long
time, because it is difficult for the
material to lose heat by conduction.
Think of a hot ceramic pan and a hot
metal pan: which cools faster?
11.10.2 Convection: The transfer of energy between an
object and its environment, due to
fluid motion. This is a different kind of heat
transfer than conduction. In
conduction, heat itself is moving; in
convection, hot portions of a fluid
move through the body of the fluid. The hot fluidmixes with the cold
fluid, and heat is transferred more
quickly than by conduction. What we commonly call a "rolling
boil" results from convection. Hot
fluids rise through surrounding,
cooler fluid because they are less
dense; cooler fluids sink through warmer fluids because they are more
dense. This causes circular motion of the
fluid away from a source of heat.
Convection in water drives ocean285

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 286/422
Physics XI
EEE Consortium
currents; convection in air drives
weather patterns; and convection of
molten rock inside the earth is
thought to drive plate tectonics.
Convection leads to the
counterintuitive fact that good
insulators (like air) can transfer heat
efficiently -- as long as the air is
allowed to move freely. Trapped air, as between panes of a
double window, cannot transfer heat
well because it cannot mix with air of
a different temperature.
11.10.3 Radiation
Radiation is the simplest means of
heat transfer. Heat radiation is
carried not by moving atoms (as inconduction or convection) but by
electromagnetic waves. Radiation is
the only way that heat can move
through a vacuum, and is the reason
that even a closed thermos bottle
(which has a vacuum between the
inner and outer parts) will eventually
come to the same temperature as itssurroundings.Heat transfer is most efficient by
convection, then by conduction;
radiation is the least efficient and
slowest means of heat transfer. Low
efficiency of heat transfer means that
vacuums make excellent insulation.
11.11 Black body radiation:
Black-body radiation is the type
ofelectromagnetic radiation within or
surrounding a body
inthermodynamic equilibrium with
its environment, or emitted by
a black body (an opaque and non-
reflective body) held at constant,
uniform temperature.
286

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 287/422
Physics XI
EEE Consortium
The radiation has a specific spectrum
and intensity that depends only on
the temperature of the body.
The thermal radiation spontaneouslyemitted by many ordinary objects can
be approximated as blackbody
radiation.
A perfectly insulated enclosure that
is in thermal equilibrium internally
contains black-body radiation and
will emit it through a hole made in its
wall, provided the hole is small
enough to have negligible effect upon
the equilibrium.
A black-body at room temperature
appears black, as most of the energy
it radiates isinfra-red and cannot be
perceived by the human eye. Because
the human eye cannot perceivecolour at very low light intensities, a
black body, viewed in the dark at the
lowest just faintly visible
temperature, subjectively appears
grey, even though its objective
physical spectrum peaks in the
infrared range.
When it becomes a little hotter, it
appears dull red. As its temperature
increases further it eventually
becomes blindingly brilliant blue-
white. Although planets and stars are
neither in thermal equilibrium withtheir surroundings nor perfect black
bodies, black-body radiation is used
as a first approximation for the
energy they emit.
Black holes are near-perfect black
bodies, in the sense that they absorb
all the radiation that falls on them. It
has been proposed that they emit
black-body radiation (calledHawking
radiation), with a temperature that
depends on the mass of the black
hole.
However, the zero principle of
thermodynamics requires thermal
equilibrium of any two subsystems toimply the equality of temperatures,
not of their masses.
287

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 288/422
Physics XI
EEE Consortium
As the temperature decreases, the
peak of the black-body radiation
curve moves to lower intensities and
longer wavelengths. The black-bodyradiation graph is also compared
with the classical model of Rayleigh
and Jeans.
11.11.1 Wien's displacement law:
Wien's displacement law shows how
the spectrum of black-body radiationat any temperature is related to the
spectrum at any other temperature. If
we know the shape of the spectrum
at one temperature, we can calculate
the shape at any other temperature.
Spectral intensity can be expressed
as a function of wavelength or of
frequency. A consequence of Wien's
displacement law is that the
wavelength at which the intensity per
unit wavelength of the radiation
produced by a black body is at a
maximum, , is a function only of
the temperature
where the constant ‘b’ known as
Wien's displacement constant, is
equal to 2.8977721×10−3 K-m.
11.11.2Stefan–Boltzmann law
TheStefan–Boltzmann law states that
the power emitted per unit area of
the surface of a black body is directly
proportional to the fourth power of its
absolute temperature:
where ‘ j’is the total power
radiated per unit areaT istheabsolute temperature and
σ = 5.67×10−8 W m−2 K−4 is theStefan–
Boltzmann constant.
11.12 Greenhouse Effect Green
The greenhouse effect is a process by
which thermal radiation from a
planetary surface is absorbed byatmosphericgreenhouse gases, and
is re-radiated in all directions.Since part of this re-radiation is back
towards the surface and the lower
atmosphere, it results in an elevation
of the average surface temperature
above what it would be in the
absence of the gases.Solar radiation at the frequencies
of visible light largely passes through
the atmosphere to warm the
planetary surface, which then emits
this energy at the lower frequencies288

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 289/422
Physics XI
EEE Consortium
ofinfrared thermal radiation.
Infrared radiation is absorbed by
greenhouse gases, which in turn re-
radiate much of the energy to thesurface and lower atmosphere. The mechanism is named after the
effect of solar radiation passing
through glass and warming
agreenhouse, but the way it retains
heat is fundamentally different as a
greenhouse works by reducing
airflow, isolating the warm air insidethe structure so that heat is not lost
byconvection.If an ideal thermally
conductive blackbody were at the
same distance from the Sun as the
Earth is it would have a temperature
of about 5.3 °C. However, since the
Earth reflects about 30% of theincoming sunlight, this idealized
planet'seffective temperature (the
temperature of a blackbody that
would emit the same amount of
radiation) would be about −18 °C. The surface temperature of this
hypothetical planet is 33 °C below
Earth's actual surface temperature ofapproximately 14 °C. The mechanism that produces this
difference between the actual surface
temperature and the effective
temperature is due to the atmosphere
and is known as the greenhouse
effect.
Earth’s natural greenhouse effectmakes life as we know it possible.
However, human activities, primarily
the burning of fossil fuels and
clearing of forests, have intensified
the natural greenhouse effect,
causingglobal warming.
11.12.1 Greenhouse gases
By their percentage contribution to
the greenhouse effect on Earth the
four major gases are:• water vapour, 36–70%
• carbon dioxide, 9–26%•
methane, 4–9%• ozone, 3–7%
The major non-gas contributor to the
Earth's greenhouse effect,clouds,
also absorb and emit infrared
radiation and thus have an effect on
radiative properties of the
atmosphere
Practice exercise
1.Two scientists are doing an
experiment designed to identify
289

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 290/422
Physics XI
EEE Consortium
the boiling point of an unknown
liquid. One scientist gets a result
of 120°C; the other gets a result of
250°F. Which temperature ishigher and by how much?
2.Dry ice, carbon dioxide, sublimes
(i.e., goes from a solid to a gas
without melting) at -78.5°C.
Express this temperature in K.3.A steel rod has a length of exactly
20 cm at 30C. How much longer
is it at50
0
C? [Use αSteel = 11 ×10−6/0C]4.By how much does the volume of
an Al cube 5.00 cm on an edge
increase when the cube is heated
from 10.00C to 60.00C? [Use α Al =
23 × 10−6 0C-1.]5. A certain substance has a mass
per mole of 50 g/mole. When 314
J of heat is added to a 30.0 g
sample of this material, its
temperature rises from 25.0C
to45.0C. (a) What is the specific
heat of this substance? (b) How
many moles of the substance are
present? (c) What is the molar
specific heat of the substance?6.It takes 487.5 J to heat 25 grams
of copper from 25 °C to 75 °C.
What is the specific heat capacity
of copper in Joules/g·°C?
7.How much heat does a refrigerator
need to remove from 1.5 kg of
water at 20.0 °C to make ice at
0°C?
Multiple Choice Questions
1. Tatiana is researching vacation
destinations, and she sees that
the average summer temperature
in Barcelona, Spain is around
26°C. What is the averagetemperature in degrees
Fahrenheit? A) 79°F
B) -3°FC) 45°F
D) 58°F
2. The apparatus shown below is
used to measure the specific heatcapacity of a liquid. Which of the
following can be done to improve
the accuracy of the experiment?(1) Take the final temperature of
the liquid immediately after the
power supply is switched off. (2) Cover the cup with a lid.
(3) Totally immerse the heatingelement of the heater into the
liquid. A) (1) onlyB) (1) and (3) only
C) (2) and (3) only
290

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 291/422
Physics XI
EEE Consortium
D) (1), (2) and (3)3.In general, the land cools down
faster than the sea at night
because A). the rise in temperature of the
sea is higher than that of the
land in the daytime.B). water has a high specific heat
capacity.C). wind blows from the sea
towards the land.D). wind blows from the land
towards the sea.4. Which of the following statements
is/are correct?(1) No radiation is emitted from
hot gases because there is no
free electron in gases.(2) The density distribution of the
heated fluid determines
whether there is convection.(3) When conduction occurs,
atoms can only vibrate in their
original positions. A). (1) onlyB). (3) onlyC). (1) and (2) onlyD). (2) and (3) only
Answers to Practice Exercise
1.2500F, 20F2.194.5 K
3.4.4 x 10-3cm4.0.43cm3
5.a) 532Jkg-1K-1
b) 0.6molc) 26.6cal mol-1K-1
6. 0.39Jg-1 K-17. 1.25 x 105 J
Answers to MCQ
1. A 2. D 3. B
4.D
291

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 292/422
Physics XI
EEE Consortium
292

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 293/422
Physics XI
EEE Consortium
293

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 294/422
Physics XI
EEE Consortium
294

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 295/422
Physics XI
EEE Consortium
12.1INTRODUCTION
We have studied thermal properties
of matter in the previous chapter. In
the present chapter we will studysome laws that govern thermal
energy.In winter when we rub our palms
together, we feel warmer because
work done in rubbing produces heat.
Conversely a heat engine uses the
heat of the steam in running the
train.Thermodynamics is the branch of
physics which deals with the
study of transformation of heat
into other forms of energy and
vice versa
It does not deal with the microscopic
constituents of the matter. It deals
with various macroscopic variableslike pressure, temperature etc. The
results of thermodynamics are useful
for other branches and fields of
physics and engineering like
mechanical, chemical, physical,
biomedical etc.
Some Important Terms(i) Thermodynamic system:-
An assembly of extremely large
numbers of particles having certain
value of pressure, volume and
295

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 296/422
Physics XI
EEE Consortium
temperature is called thermodynamic
system.
Eg: gas enclosed in a container.
(ii)Surroundings: - Anything which effects the
thermodynamic system is called
surroundings.
(iii) Thermodynamic variable: -
Variable which determine the
thermodynamic behavior of a system
are called thermodynamic variable.
Eg: pressure, volume, temperature,
internal energy, entropy etc
(iv) Equation of State
The equation of state represents the
connection between the state
variables of a system. For example,
the equation of state of an
ideal/perfect gas is represented as
Where µ is number of moles of the gas
and R is gas constant for one mole of
gas.
12.2
THERMAL EQUILIBRIUM
We know that thermo dynamical
system is the name given to anassembly of an extremely large
number of particles (atoms or
molecules). The thermo dynamical
system may exist in the form of a
solid, a liquid or a gas or a
combination of two or more states. A thermo dynamical system is said to
be in thermal equilibrium whenmacroscopic variables (like pressure,
volume, temperature, mass,
composition etc.) that characterise
the system do not change with time.
For example, a gas is enclosed in a
rigid container and insulated
completely from its surroundings is
in a state of thermo dynamicalequilibrium.On a multiple systems case, when
two systems are in contact with each
other, they can be in contact by way
of a wall that can be perfectly
adiabatic all the way through a wall
that is perfectly diathermic.
Adiabatic Walls
A wall is called adiabatic if the wall
does not permit the transfer of energy296
=

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 297/422
Physics XI
EEE Consortium
(heat) between the systems. Materials
such as concrete, asbestos, and
styrofoam represent a good
approximation of adiabatic walls.
Diathermic Walls
It is a conducting wall that allows
flow of heat. In this case, thermal
equilibrium can be attained.
12.3
THERMODYNAMIC EQUILIBRIUM
A system is said to be in
thermodynamic equilibrium if the
macroscopic variables describing the
thermodynamic state of the system
do not change with the time.Consider a gas inside a closed rigid
container completely insulated fromthe surroundings. If the pressure,
volume, temperature, mass and
composition of the gas do not change
with time, then it is in a state of
thermodynamic equilibrium.
Conditions for Thermodynamic
Equilibrium
The system is said to be in
thermodynamic equilibrium if the
conditions for following three
equilibrium is satisfied:
(i)Mechanical equilibrium: When there are no unbalanced
forces within the system and
between the system and thesurrounding, the system is said to
be under mechanical equilibrium.(ii) Chemical equilibrium: The system is said to be in
chemical equilibrium when there
are no chemical reactions going on
within the system or there is no
transfer of matter from one part ofthe system to other due to
diffusion.(iii) Thermal equilibrium: When the temperature of the
system is uniform and not
changing throughout the system
and also in the surroundings, the
system is said to be thermal
equilibrium. Two systems are said
to be thermal equilibrium with
each other if their temperatures
are same.
12.4
ZEROTH LAW OF
THERMODYNAMICS
It defines the exchange of heat
as well as defines the
temperature. The law deals with
297

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 298/422
Physics XI
EEE Consortium
the concepts used for designing
the thermometer. Temperature is basically associated
with the ability to distinguish hotfrom cold. When two bodies having
different temperatures come in
contact with each other, they attain a
common temperature and hence the
state of thermal equilibrium. According to the Zeroth law of
thermodynamics:
When a given object or body A is in
thermal equilibrium with a body or
object B, and separately with a body
or object C also, then B and C would
necessarily be in thermal equilibrium
with each other.
A simple experiment that illustrate
the scope of the Zero Law of
Thermodynamics
Figure 8.1
To understand the law, we have
shown two systems A and B
separated by an adiabatic wall which
does not allow any transfer of heat. The two systems A and B are in
contact with a third system c through
a dia-thermic wall which allows
transfer of heat .The macroscopic
variable of the system A and B will
change until both A and B come to
thermal equilibrium with C.
After this is achieved, suppose the
adiabatic wall between A and B is
replaced by a conducting dia-thermic
wall; and C is insulated from A and B
by an insulating adiabatic wall.
Experiments show that the states of
A and B change no further, i.e, they
are found to be in thermalequilibrium with each other.The physical quantity that determines
whether or not given system A is in
thermal equilibrium with another
system B is called temperature.
Obviously, if two systems are in
thermal equilibrium, their
temperature must be same, and if
they are not in thermal equilibrium,
their temperature s must be
different.
298

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 299/422
Physics XI
EEE Consortium
Thus if a thermometer records one
particular value of temperature for
system A and system B , it will record
the same reading when the twosystems are brought in contact with
each other . The Zerothlaw of thermodynamics is
the basis for temperature
measurement of a body or object. A body at a lower temperature is
called a cold body and a body at a
higher temperature is called a hot body.
12.5 Heat Internal Energy And
Work
Heat
It is a form of energy. Heat is an
energy transfer due to thetemperature difference between a
system and its surroundings. The flow of heat stops when the
temperatures equalise; the two
bodies are then in thermal
equilibrium.
Internal Energy Work is the energy transfer brought
about by other means, such as
moving the piston of a cylinder
containing gas.
Internal energy of a system is the
sum of the kinetic and potential
energies of the molecular
constituents of the system.It includes the energy associated with
the random motion of molecules of
the system.Internal energy (as state variable)
depends on the given state of the
system, and not on the path taken to
reach the state.Internal energy and work are
equivalent.
Work
Work is the mode of energy transfer
that produces organized motion,
brought by means that does not
involve temperature difference, but it
is due to the work done by thesystem or work done on the system.
Sign conventions used:
(i)Heat absorbed by a system is
positive. Heat given out by a
system isnegative.
(ii) Work done by a system is
positive. Work done on a system is
negative.
299

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 300/422
Physics XI
EEE Consortium
(iii) The increase in internal energy
of a system is positive. The
decrease in internal energy of a
system isnegative.
Zeroth Law of Thermodynamics
12.6
THERMODYNAMIC PROCESSES
A thermodynamic process is said to
take place when some changes occur
in the state of a thermodynamicsystem i.e , the thermodynamic
parameters of the system change
with time .
Following are some of the important
thermodynamic processes:
1.Isothermal process is that whichoccurs at a constant temperature.
2. Adiabatic process is that process
in which no heat leaves or enters
the thermodynamic system during
the change.
3.Isobaric process is that whichoccurs at constant pressure.
4.Isochoricprocess is that which
occurs at a constant volume.
Table 8.1 given below summaries
the four special thermodynamic
processes.
S.
no
Types of
processes
Feature
1 IsothermalTemperature
constant2 Adiabatic No heat flow
between the system
and
surroundings ,ie,Q=0∆
3 Isobaric Pressure constant
4 Isochoric Volume constant
300

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 301/422
Physics XI
EEE Consortium
Quasi-Static Process
An idealised process in which at
every stage the system is in anequilibrium state.
Such a process is infinitely slow and
hence, named quasi-static (i.e.,
nearly static).
Changes in the system are so slow
that it remains in thermal and
mechanical equilibrium with its
surroundings.For example, to take a gas from the
state (P, T) via a quasi-state process,
we change the external pressure
/temperature by a very small amount
and allow the system to equalize its
pressure /temperature with the
surroundings .Continue the process
infinitesimally slowly till the finalstate (P’,T’) is attained .Obviously a quasi-state process is a
hypothetical construct. The process
must be infinitely slow, should not
involve large temperature differences
or accelerated motion of the piston of
the container.
12.7P-V INDICATOR DIAGRAM
P-V Indicator Diagram is just a graph
between pressure and volume of a
system undergoing an operation.
When a system undergoes anexpansion from state A (P1 V1) to a
state B (P2 V2) its indicator diagram is
shown as follows.
In case of compression system at
state A(P1 V1) goes to a state B(P2 V2)
its indicator diagram is as follows.
Intermediate states of system are
represented by points on the curve.
Importance of P-V diagram is that
the area under the P-V diagram is
301

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 302/422
Physics XI
EEE Consortium
numerically equal to the work done
by a system or on the system.
12.8ISOTHERMAL OPERATION
(CHANGE)
A change in pressure and volume of
gas without any change in its
temperature is called an isothermal
change. In such a change, there is a
free exchange of heat between the gas
and its surroundings. The two essential conditions for a
perfect isothermal changes are:
1.The walls of the container must be
perfectly conducting, to allow free
exchange of heat between the gas
and its surroundings.2.The process of compression or
expansion should be slow so as toprovide time for the exchange of
heat.
For Example
1)Melting process is an isothermal
change, because temperature of a
substance remains constant
during melting.2)Similarly, boiling process is also
an isothermal operation.
Equation of an isothermal change
As in all isothermal operations
temperature is kept, constant,
pressure (P) and volume (V) are
related to each other by Boyle’s law,i.e,
-------------- (1)
Isothermal Curve
If we plot a graph between V and P
keeping temperature constant, we get
a curve called an isothermal curve or
an isotherm for the given mass of gasat a given temperature. In fig 8.3
isotherms for three differentT 1,T 2∧T 3, are shown. The curves
move away from the origin at higher
temperatures.
Figure 8.3
12.9
ADIABATIC OPERATION (CHANGE)
A change in pressure and volume of a
gas in which temperature also
changes is called an adiabatic
change. In such a change, no heat is
allowed to enter into or escape from
302
= #o+"%+

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 303/422
Physics XI
EEE Consortium
the gas (i.e. , there is no exchange of
heat between the gas and its
surroundings).
The two essential conditions for a
perfect adiabatic change are:
1.The walls of the container must be
perfectly non-conducting in order
to prevent any exchange of heat
between the gas and its
surroundings and2.The process of compression or
expansion should be sudden so
that there is no time for the
exchange of heat.
A few examples of nearly perfect
adiabatic changes are:
1.Sudden compression or expansion
of gas in a container with perfectly
non conducting walls.2.Sudden outburst of the tube of a
bicycle tire3.Propagation of sound eaves in air
and other gas4.Expansion of hot gases in an
internal combustion engine5.Expansion of steam in the cylinder
of steam engine
Equations of adiabatic change
1.The adiabatic relation between P
and V for a perfect gas is
....(2) Where
. =speifi heatof t h e gas at onstant pressurespeifi heatof t h e gasat onstant volume
2.From standard gas equation ,
PV=RT or P= RT
%
Putting in (2), we get RT
% %
=K
T % ( −1) = & R = another constant.
….(3)
This is the adiabatic relation between
T and V for a perfect gas.
3.Again, from standard gas equation
P =
RT
%
Putting in (2) , we get
P R
T
p = K
((1−. )T .
= &
R = another constant
….(4)
This is the adiabatic relation betweenP and T for a perfect gas12.10
SLOPES OF ISOTHERMAL AND
ADIABATIC CURVES
303%
T % ( −1)
=
((1−. )T .
=

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 304/422
Physics XI
EEE Consortium
We can show that the slope of an
adiabatic curve is . times the slope
of an isothermal curve. As . >1
therefore adiabatic curve at any point
is steeper than the isothermal curve
at any point as shown in figs 8.4(a)
and (b). Note that the isothermal
curves lie above the adiabatic curve
on case of expansion as shown in fig
8.4(a)
Figure :8.4 (a) Figure :8.4 (b)
However, in case of compression, theisothermal curve lies below the
adiabatic curve as shown in fig
8.4(b).
12.11
WORK DONE IN AN ISOTHERMAL
EXPANSION
Consider one gram mole of an idealgas enclosed in a cylinder with
perfectly conducting walls and fitted
with a perfectly frictionless and
conducting piston. Let (1,% 1,∧T / Be
the initial pressure, volume and
temperature of the gas. Let the gas
expand to a volume % 2, when
pressure reduces to (2 and
temperature remains constant at T.
at any instant during expansion, let
the pressure of the gas be P.If A is area of cross section of the
piston, then force exerted by the gas
on the piston is
F = P x A …. (5)If we assume that the pressure of the
gas during an infinitesimally small
outward displacement dx of the
piston remains constant, then small
amount of work done during
expansiondW = F .dx = P × A × dx
dW = P(dV)
where dV = A(dx) = small increase in volume of gas . Total work done by the gas in
expansion from initial volume % 1,
to final volume % 2, is
W = ∫% 1
% 2
( d%
From standard equation,
PV = RT or P= RT
%
304

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 305/422
Physics XI
EEE Consortium
W= ∫% 1
% 2 RT %
d% = RT ∫% 1
% 21
% d%
W = RT [ loge % ] v2 v1
W= RT [loge % 2−loge % 1¿
= RT loge
% 2% 1 ….. (6)
.’.…. (7)
Now as (1% 1 = (2% 2
% 2
% 1 =
(1
(2
W =2.3026 RT log10
(1
(2 …. (8)
Amount of heat spent in isothermal
expansion (in calories) is
..... (8a)
This much heat must have been
gained by the gas from surroundings.
That is why temperature of the gas
remains constant at T.
12.12
WORK DONE IN ADIABATIC
EXPANSIONConsider one gram mole of an ideal
gas enclosed in a cylinder with
perfectly non conducting piston. Let (1 / % 1 /∧T 1 / be the initial pressure,
volume and temperature of the gas. If
A is area of cross section of the
piston, then force exerted by the gas
on the pistonF = P × A … (9) Where P is pressure of the gas at any
instant during expansionIf we assume that the pressure of the
gas during an infinitesimally small
outward displacement dx of the
piston remains constant, then small
amount of work during expansion, dW = F x dx = (P x A)dx dW= P dV …… (10)
Where dV = A(dx) = small increase in
volume of the gas . Total work done by the gas in
adiabatic expansion from volume V1to V2 is
W = ∫% 1
% 2
( d%
….. (11)
The equation of adiabatic changes is
P %
= K (a constant) ..… (12)
From(12), P = &
% = K %
−
Put in (11) , we get
W= ∫% 1
% 2
& % −
d% = K
[
% (1− )
1−
] W= & 1−
[% 2(1− )−% 1
(1− )] ….. (13)
Equation of adiabatic changes can be
put as
305
= 2.3026 T
0

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 306/422
Physics XI
EEE Consortium
(2% 2
= (1% 1
= K
W =1
1−. [ (2% 2
. % 2(1−. )− (1% 1
. % 1(1−. )]
W=1
1− [ (2% 2− (1% 1 ] …… (14)
If T 2 is final temperature of the gas
in adiabatic expansion, then from
standard gas equation, (1% 1 = R T 1 , (2% 2= R T 1
Putting these values in (14) we get
….. (15) Amount of heat is spend in adiabatic
expansion (in calories) would be
H =0 1 =
1
T 2−T ¿¿
R ¿¿
…..
(16) That is why temperature of gas would
fall (T 2 < T 1 ¿ in adiabatic
expansion. from equation (16) W
shall be positive.On the contrary, in adiabatic
compression, temperature will riseT 2 > T 1 . Therefore, W will be
negative.
12.13
WORK DONE IN AN
ISOTHERMAL /ADIABATIC
PROCES IN TERMS OF INDICATOR
DIAGRAM
Consider one gram of mole of an ideal
gas enclosed in a cylinder fitted witha perfectly frictionless piston. Let
(1 / % 1∧T be the initial pressure,
volume and temperature of the gas. If dV is an infinitesimally small
increase in volume of the gas ,
through which pressure exerted by
the as is assumed to remain constant
at P then the small amount of work
done by the gas. dW = P dV …. (17) Total work done by the gas in
expansion from volume % 1¿% 2 is
W = ∫% 1
% 2
(d% …. (18)
The entire operation of the expansionis represented by the indicator
diagram i.e. , P – V diagram in fig 8.5
Figure :8.5 The relative variation of volume V
and pressure is represented by the
curve AB, where A (% 1 / (1¿
306
=

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 307/422
Physics XI
EEE Consortium
represents initial state of the system
and B (% 2 / (2¿ represents final state
of the system. At any time, the state of the system is
represented by point p on AB. Here
pq=P=pressure and Oq = v, the
volume of the gas. The points p and s
are so close to each other that the
shaded strip pqrs may be regarded asa rectangle of P. dV . Therefore, area
of the strip gives us amount of work
done by the gas in expansion from
volume Oq to volume Or.Proceeding in this way, we can
calculate total work done by the gas
in expansion from volume % 1¿% 2 as
W= ∫% 1
% 2
(d% = ∫ 2
3
area of t h e strip paper
W = area of ABCDA .......(19)
Thus work done by the gas in
isothermal /adiabatic expansion is
equal to area between the PV curveand volume axis.
12.14COMPARISON BETWEEN
ISOTHERMAL AND ADIABATIC
CHANGES
Table 8.2 below gives the main points
of distinction between isothermal andadiabatic changes.
12.15 WORK DONE IN ISOCHORIC
307
ISOTHERMALCHANGES
ADIABATICCHANGES
1. Temperature (T)
remains constant
i.e. T=0∆
Heat content (Q)
remain constant
i.e. , Q=0∆
2. System is
thermally
conducting to the
surroundings.
System is
thermally
insulated from the
surroundings3. The changes occurslowly The changes occursuddenly
4. Internal energy (U)
remains constant
i.e. , U=0∆
Internal energy
Changes U ≠
constanti.e. U=0∆
5. Specific heat
becomes infinite
Specific heat
becomes 06. Equation of
isothermal changes
is PV = constant
Equation of
adiabatic changes
is P % =
constant7. Slope of isothermal
curve :d(d% = -
(P/V)
Slope of adiabatic
curve :d(d% = -
. (P/V)
8. Coefficient of
isothermalelasticity 'i= (
Coefficient of
adiabatic elasticity: 'i= (

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 308/422
Physics XI
EEE Consortium
PROCESS
In an isochoric process, volume V is
constant. No work of done by the gas.
Heat absorbed by the gas goesentirely to change its internal energy
and temperature.
Figure 8.6
Since volume is kept constant.
dW = PdV = 0
W = 0
12.16
WORK DONE IN ISOBARIC
PROCESS
In an isobaric process, pressure P of
fixed. Work done by the gas is
W = P(% 2 - % 1 ) = µR(T 2−T 1¿ ….
(20) As temperature changes, so does the
internal energy of the gas. The heat absorbed increases partially
the internal energy is spent partially
in doing work.
Figure :8.7
12.17CYCLIC AND NON CYCLIC
PROCESSES
A cyclic process consists of a series of
changes which return the system back to its initial state. For example,
suppose a system consists of a gas at
a pressure P, volume V and
temperature T. Let the system be
subjected to a number of changes
including isothermal and adiabatic
expansions and compression s. In
final state, if the system has thesame pressure P, the same volume V
and the same temperature T, the
succession of changes involved are
said to form a cyclic process.On the contrary, in a non – cyclic
process, the series of changes
involved do not return the system
back to initial state.
Work Done During A Non Cyclic
Process
308

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 309/422
Physics XI
EEE Consortium
Conventionally, the work done is
taken as positive, when the gas is
expanding, and it is taken as
negative, when the gas iscompressed. As the two points representing the
initial and final state of a system can
be joined by any number of different
curves, and the area enclosed by
each curve is different. Hence we
conclude that the work done in a
non-cyclic process depends upon thepath chosen or the series of changes
involved.
Work Done In A Cyclic Process
Let A (% 1 / (1 ¿ represent the initial
state of gas , fig 8.8 . Let it subjected
to a number of changes in volume
and pressure such that it acquiresthe final state B (% 2 / (2¿ , via the
path AEB. Therefore, work done by the gas in
going from A to B along AEB is0 1=area *'432*
Figure: 8.8
Let the system be now subjected to
another succession Of changes in
volume and pressure, which return
the system back to the initial state A(% 1 / (1¿ along the path BFA. The
total number of changes involves
obviously constitute a cyclic process. Therefore, work done on the gas in
going from B to A via the path BFA is0 2 = - area BFADCB
Net work done by the gas in the cyclic
process is :0 *- 4 - *=0 1+0 2
= area AEBCDA – area BFADCB= area AEBFAHence we conclude that work done
per cycle is numerically equal to the
area enclosed by the loop
representing the cycle.
12.18
FIRST LAW OF THERMODYNAMICS
309

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 310/422
Physics XI
EEE Consortium
This law is simply the general law of
conservation of energy applied to any
system
We know that the internal energy Uof a system can change through two
modes of energy transfer: heat and
workLet dQ = a small amount os heat
supplied to the system by the
surroundingsdW = small amount of work done by
the system on the surroundingsdU= small change in internal energy
of the system According to general principle of
conservation of energy…. (21)
......(21)
i.e. Energy supplied (dQ) to the
system is spent partially inincreasing the internal energy of the
system (dU) and the rest in doing
work on the surroundings .Eqn (21) is known as the first law of
thermodynamics. As internal energy U of the system is
a state variable, the change in
internal energy of the system (dU)depends only on initial state and final
state of the system. It would not
depend upon the path taken by gas
to go from one state to the other.
However, the combination (dQ – dW),
which is equal to dU shall be
independent of the path taken by the
system to go from initial state to finalstate. The following points are worth noting
regarding the first law of
thermodynamics:
(i) This law , which is basically the law
of conservation of energy, applies to
every process in nature
(ii) The law applies equally to all thethree phases of matter i.e. solid,
liquid and gas .(iii) While applying the first law of
thermodynamics, care must be taken
that all the three quantities dQ, dW ,
dU are expressed either in joules or
in calorie .
(iv) Just as Zeroth law ofthermodynamics introduces the
concept of temperature, the first law
of thermodynamics introduces the
concept of internal energy.(v) From first law of thermodynamics, we
learn that it is impossible to get work
from any machine, without giving an
equivalent amount of energy to themachine.
(vi) The first law establishes the
essential equivalence between work
and heat , as according to the law ,
310
& = &

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 311/422
Physics XI
EEE Consortium
internal energy (and hence
temperature) of a system can be
increased either by supplying heat to
it or by doing work in the system or both
12.19 APPLICATIONS OF THE
FIRST LAW OF THERMODYNAMICS
(a)Isothermal process: In a process,
temperature remains constant. If the
system is an ideal gas, whose
internal energy U depends only ontemperature the internal energy shall
remain constant i.e. dU = 0 . The first law of thermodynamics
implies :dQ = dU +dW = 0 + dW = dW i.e. ……………….(22)
(b)Adiabatic process : In an adiabaticprocess, no heat energy enters or
leaves the system as or t is well
insulated i.e, dQ = 0 The first law of thermodynamics
impliesdQ = dU + dW =0
or
When a gas expands adiabatically,
dW is positive. Therefore, dU must be
negative i.e. internal energy of the
system would decrease and the gas
will be cooled. The reverse is true.
(c)Isochoric process: When the volumeof a system (such as gas) is kept
constant ,dW =P(dV)=0. The first law of thermodynamics
impliesdQ = dU + dW
(d)Cyclic process: In such a process,the system is returned to its initial
state after any number of changes. In
that case, no intrinsic property of the
system would change i.e. dU = 0. The first law of thermodynamics
impliesdQ=dU + dW
1)Net work done during a cyclic process
must exactly equal the amount of
heat energy transferred(e)Melting process: When a solid melts
to a liquid , its internal energy
increases , which can be calculated
from first law of thermodynamics
Let m = mass of solid . L = latent heat of the solid Amount of heat absorbed during the
melting process, dQ = mL……………….(23)
311
& =
& = ;
& = &
& = &

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 312/422
Physics XI
EEE Consortium
When a substance melts, the change
in its volume dV is very small and
therefore, it can be neglected
dW = P (dV) = P x 0 = 0 According to first law of
thermodynamicsdQ = dU + dWmL = dU + 0 or
………….(24)
Hence the internal energy during the
melting process by (mL) .
Note that the increase in internalenergy during melting process is at
constant temperature. Therefore, it
must be due to increase in internal
potential energy (5 (¿ . The internal
kinetic energy (5 & ) remains
constant.
(f)Boiling process: Using first law of
thermodynamics, we can calculate
increase in its internal energy of a
liquid in the process of boiling. In
boiling, a liquid changes into vapours
at constant temperature and
pressure. Suppose ,
m = mass of liquid at its boiling point% 1 = volume of liquid
( =constant pressure at which
boiling process occurs
% 2 = volume of the same liquid in
the vapour form under same
pressure L = latent heat of vaporizations of
the liquidHence, work done in expansions,
dQ = P (dV) = P (% 2−% 1 ¿ …. (25)
Heat absorbed by the liquid in the
boiling processdQ = mL …. (26) According to the first law of
thermodynamics,dQ = dU + dWdU = dQ – dW
…. (27)
Knowing m, L, P, % 1 and % 2 we
can calculate dU, i.e. increase in
internal energy of the liquid in the
boiling process . This is again due toincrease in internal potential energy.
(g)Relation between two Specific
heats of a gas (Mayer’s formula )
First law of thermodynamics can be
used for establishing between two
specific heats of gas, as detailed
below:Consider one gram of molecule of an
ideal gas enclosed in a cylinder fitted
with a piston, which is perfectly
frictionless. Let P, V, T be the initial
312
& = '<
& = '< >

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 313/422
Physics XI
EEE Consortium
pressure, volume and temperature of
the gas.Let the gas be heated at a constant
volume through a small range oftemperature dT Amount of heat energy supplied to
the gas
dQ= 3 % .1.dT …. (28)
Where 3 % is the molar specific heat
of the gas at constant volume. As volume remains constant, dV = 0
dW = P (dV) = 0 According to first law of
thermodynamicsdQ = dU + dW3 % .dT = dU + 0
dU = 3 % .dT …. (29)
Let the gas be now heated at
constant pressure through the same
range of temperature dT, when its volume increase by a small amount
dV. Amount of heat energy supplied to
the gas
d 67
= 3 ( . dT …. (30)
where 3 ( is molar specific amount
of the gas at constant pressuredW = P (dV) …. (31)
If d 5 7
is the currosponding
increase in internal energy of the gas,
then according to first law of
thermodynamics.dQ’ = dU’ + dW’
3 ( . dT = dU’ + PdV …. (32)
As rise in temperature of the gas in
the two cases is the same (=dT),
therefore, increase in its internal
energy (which depends only on
temperature in case of ideal gas)
must be same in two cases, i.e.,dU’ =dU
Using (29),dU’ = dU = 3 % dT …. (33)
Putting in (32) we get3 ( dT = 3 % dT + PdV
( 3 (−3 % ) dT = PdV ….. (34)
According to standard gas equationPV = RTDifferentiating both sides, we get
PdV = RdT(since P and R are constant)Putting in (34) , we get
( 3 (−3 % ) dT = RdT
…. (35)
which is the required relation.
12.20LIMITATIONS OF THE FIRST LAW
OF THERMODYNAMICS
The first law of thermodynamics
establishes equivalence between the
heat energy and mechanical work313
3 (−3 %

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 314/422
Physics XI
EEE Consortium
and says that the two can be
converted into each other. Further,
4.18 joule of mechanical work is
required to produce one calorie ofheat and vice-versa. However, this
law has the following limitations:1.The first law does not indicate the
direction in which the change can
occur :For example:
(i) When two bodies at different
temperatures are put in thermalcontact either each other, heat flows
from the body at higher temperature
to the body at lower temperature. We
now know that the heat cannot flow
from the body au lower temperature
to the body at higher temperature,
although first law of thermodynamics
is not violated.(ii) When a moving car is stopped by
applying brakes, work done against
friction is converted into heat. When
the car cools down , it does not start
moving with the conversion of all its
heat energy into mechanical work(iii) When a bullet strikes a target, kinetic
energy of the bullet is converted intoheat energy. But heat energy
developed in the target cannot be
converted back to mechanical energy
of the bullet enabling it to fly back.
2.The first law gives no idea about
the extent of change :
Our observation and experience tell
that there appears to be norestriction on conversion of
mechanical work into heat. But there
are sever restrictions in the reverse
process i.e. conversion of heat energy
into mechanical energy. We know that heat is not converted
into mechanical energy by itself. An
external energy called the heatengine is required for the purpose.No heat engine convert all the heat
energy received from the source into
mechanical energy .The first law of
thermodynamics is silent about all
this.
3.The first law of thermodynamicsgives no information about the
source of heat i.e. whether it is a
hot or cold body.
Solved ExamplesExample 1
A sample of gas ( =1) is taken
through an adiabatic process in
which the volume is compressed from
314

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 315/422
Physics XI
EEE Consortium
1600 cc to 400 cc. If the initial
pressure is 150 KPa, what are the
final pressure and how much work is
done on the gas in the process?Solution:
Here = 1.5% 1=1600 .
% 2 = 400 c.c.
(1=¿ 150 k Pa = 150 x 103 Pa
(2=8
In an adiabatic process, (2% 2
= (1% 1
Therefore,
% 1% 2¿¿
(2= (1¿
= 150
1600
400
¿¿¿
=1200 k Pa Work done on the gas in the
process
W = (1 % 1− (2 % 2
−1
=
(150 x 103 ) (1600 x 10
−6 )−(1200 x103)(400 x10−6)1.5−1
=240−480
0.5
= - 480 J
Example 2
A gram molecule of a gas at 127o
C
expands isothermally until its volumeis doubled. Find the amount of work
done and heat absorbed. Take R =
8.31 J mole−1
& −1
.
Solution:
Here , T = 127o
C = 127 + 273 = 400
K
% 2 = 2 % 1
W = 2.3026 RT log10
% 2% 1
= 2.3026 x 8.31 x 400 log102
= 2.3026 x 8.31 x 400 x 0.3010 1=2.3026 x 103 joule Amount of heat absorbed =
2.303 X 103
4.2 cal. = 548.5 cals.
Example 3
At 27°C, two moles of an ideal mono-
atomic gas occupy a volume V. The
gas is adiabatically expanded to a
volume 2V.
(i) Calculate the ratio of finalpressure to the initial pressure(ii) Calculate the final temperature(iii) Change in internal energy
(iv) Calculate the molar specific heat
capacity of the process.315

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 316/422
Physics XI
EEE Consortium
Solution:
Given : n=2 , T = 27 °C = 300 K
V1=V and V2=2V
Now PV y=constantP1 V1 y=P2 V2 y
P2/P2=(V1/V2) y=.55/3
Also
T1 V1 y-1=T2 V2 y-1
or T2=300/25/3=189K
Change in internal energy=nC v∆T
For monoatomic gas C v=3R/2
Substituting all the valuesChange in internal energy=-2764J
As in adiabatic process ∆Q=0,molar
specific heat capacity=0
Example 4
One mole of an ideal gas does 3000 J
of work on its surroundings as itexpands isothermally to a final
pressure of 1 atm and volume of 25
L.
Determine –
(a) the initial volume and
(b) the temperature of the gas.
Solution:
(a) For an isothermal process thetemperature is constant.
Therefore PV = nRT = constant.
PV = 101000 Pa*25*10-3m3= nRT
for an isothermal process.
W/(nRT) = 3000 J/(101000Pa*25*10-3m3) = 1.19
V2/V1= exp(1.19) = 3.28
V1= (25*10-3m3)/3.28 = 7.62*10-3m3=
7.62 liter
(b) For an ideal gas PV = nRT.
101000Pa*25*10-3m3= (8.31 J/K)T.
T = 303.85 K.
Example 5
Calculate the fall in temperature
when a gas initially at 720C is
expanded suddenly to eight times its
original volume. Given γ= 5/3.Solution:
Let V1 = x cc
V2 = 8x cc T1 =273+72 =345 K γ= 5/3. T2 = ?Using the relation
T 1% 1( −1)=T 2% 2
( −1)
Therefore T2 = 345x(1/8)2/3
Taking log of both sides, we get
Log T2 = log 345 – 2/3 log 8=2.5378 – 2/3(0.9031)= 2.5378 -0.6020 = 1.9358Or T2 =86.26 K Therefore the fall in temperature
316

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 317/422
Physics XI
EEE Consortium
= 345 - 86.26 = 258.74 KExample 6
An ideal monoatomic gas goes
through the cyclic process A→B→C→ A as shown to the right.
The temperature of the gas at A is
600K. Calculate the work done on
the gas, the heat absorbed by the
gas, and the change in internal
energy for each process and for the
total cycle.
Solution:
From the ideal gas equation, PV =nRT, we can calculate that TB = 600K
and TC = 200K. Since this is a
monoatomic gas, then we have U =
3/2 nRT. We keep in mind that 1
liter = 10-3 m3. A→B:
Since the gas is expanding, then the work doneon the gas is negative and W AB = area under PV curve = (2x104
Pa)(4x10-3m3) = 80 J∆U AB = 3/2 nR∆ T AB = 0 (T A = TB)From the 1st law, Q AB =∆U AB + W AB = 0
+ 80 J = 80 J (heat isabsorbed)B→C:Since the gas is being compressed,
the work doneon the gas is negativeandsince the area under PV curve =
(1x104Pa)(4x10-3m3) = 40 J WBC= -40J∆UBC = 3/2 nR∆ TBC = 3/2 nR(TC – TB)
= 3/2 PC VC – 3/2 PB VB=3/2 (1x104 Pa)(2 – 6 )x10-3 m3 = -60
JQBC =∆UBC + WBC = -60 J+ (– 40) J = -100 JC→ A: This is an iso-volumeric process, so
WCA = 0.∆UCA = 3/2 nR∆ TCA = 3/2 nR(T A – TC)= 3/2 P A V A – 3/2 PC VC
=3/2 (3x104
Pa – 1x104
Pa)(2x10-3
m3
)= 60 JQCA =∆UCA + WCA = 60 JSummary results:∆U = QNET - WNET
317

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 318/422
Physics XI
EEE Consortium
Note that the total work done in the
cycle is the enclosed area. The
negative value means that the gas
does work on its environment duringthe cycle. Since the gas returns to its
original state, the net change in
internal energy is zero. The net heat absorbed is equal to the
net work doneby the gas. Heat is
absorbed during the processes A→B
and C→ A and rejected during the
process B→C.
Example 7
A thermodynamic system undergoes
a process in which its internal energy
decreases by 500 J. If at the same
time 220 J of work is done on the
system, find the thermal energy
transferred to or from it.Solution:
Increase in internal energy of a
system
= heat put into the system - work
done by the system on its
surroundings,
or
∆U = ∆Q - ∆W.
-500J = ∆Q + 220 J
∆Q = -720 J
Example 8
In a certain process, 600 J of work is
done on the system which gives off
250 J of heat. What is the change in
internal energy for the process?Solution:-
The absorption of heat by the system
tends to raise the energy of the
system. The performance of work by
the system, on the other hand, tends
to lower the energy of the system
because performance of workrequires expenditure of energy. Therefore the change in internal
energy ∆U, of a system is equal to the
head added to the system minus the
work done by the system:∆U = UB – UA = q + w
Here q = – 250 J and W = 600 J Therefore, change in internal energy
∆U = – 250 J + 600 J= 350 JHence, the change in internal energy
for the system is equal to 350 J
Example 9
A sample of ideal gas ( = 1.4) is
heated at constant pressure .If an
amount 140 J of heat is supplied to
the gas , find (a) change in internal
energy of the gas (b) work done by
the gas .Solution:-
318

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 319/422
Physics XI
EEE Consortium
Let the sample of gas contains ‘n’
moles At constant pressure, let the state of
gas change from (% 1 /T 1¿ to (% 2 /T 2¿ Heat supplied dQ = n 3 ( (
T 2−T 1 ¿
= 140 JChange in internal energy of gas
dU =n 3 % (T 2−T 1 ¿
=
n3 %
3 (3
( (T 2−T 1¿
=3 %
3 ( dQ =140
1.4
= 100 J Work done by the gas
dW = dQ – dU= 140 –100 = 40 J
Example 10
At 0o C, and normal atmospheric
pressure, the volume of 1 gram of
water increase from 1 c.c to 1.091 c.c
on freezing. What will be the change
in its internal energy? Normal
atmospheric pressure of 1.013 x 10-5
N/m2 and latent heat of melting of ice
= 80 cal/gramSolution:-
Here , m = 1gram . dV =1.091 -1.000 = 0.091 c.c
= 0.091 x 10 -6 m 3 P = 1.013 x 105 N/ m 2
L = 80 cal/g ; dU = ?Heat released by 1 g of ice on freezing dQ = mL = 1 x 80 = 80 cal. As this heat is given out by water, it
is taken as negative i.e.dQ = -80 cals.
External work done by water, dW = P(dV)= 1.013 x 10 5 x 0.091 x 10-6 J
= 0.0092 joule
=0.0092
4.2 = 0.0022 cal .
As dU = dQ – dW = -80 – 0.0022= -80.0022 cal.Negative sign indicates that internal
energy of water decreases on freezing
Example 11
Calculate the final volume of one
mole of an ideal gas initially at 0oC
and 1 atm pressure. If it absorbs
2000 cal of heat during reversible
isothermal expansion.
Solution:-
The gas is in the standard
temperature and pressure condition
i.e. at S.T.PHence V1 = 22.4 dm3 and V2 have to
be calculated. As given expansion is isothermal and
reversible therefore, U = 0∆
We know that U = q + w∆
But U = 0∆
319

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 320/422
Physics XI
EEE Consortium
Hence q = – w = 2000 cal
= 2000 X 4.184 J = 8368 J As work done in reversible isothermal
expansion is given by: W= -nRT ln (V2/ V1)
ThereforenRTln (V2/ V1) = – w = 8368 J
(I mol) X (8.314 J K- mol-) X (273 K) ln
(V2/ 22.4 dm3) = 8368 J
V2 = 242.50 dm3
Hence the final volume of one mole of
an ideal gas initially at 0oC and 1 atm
pressure is equal to 242.50 dm3
12.21 HEAT ENGINE
Any device which convents heat
continuously into mechanical work is
called a heat engine.
For any heat engine there are three
essential requirements.
1.SOURCE: A hot body at fixed
temperature T1 from which heat
engine can draw heat.2.SINK: A cold body, at a fixed lower
temperature T2, to which any
amount of heat can be3.WORKING SUBSTANCE: The
material, which on being supplied
with heat will do mechanical work.
In heat engine, working substances,
could be gas in cylinder with a
moving piston.
In heat engine working substancetakes heat from the source, convents
a part of it into mechanical work,
gives out rest to the sink and returns
to the initial state. This series of
operations constitutes a cycle. This cycle is represented in fig below
Figure 8.9
Work from heat engine can becontinuously obtained by performing
same cycle again and again.Consider,
Q1 - heat absorbed by working
substance from source
Q2 - heat rejected to the since
W - net amount of work done by
working substance
Q1-Q2 - net amount of heat
absorbed by working substance.
∆U = 0 since in the cycle Working
Substance returns to its initial
condition.320

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 321/422
Physics XI
EEE Consortium
According to first law of
thermodynamicsdQ = dU + dW
Therefore, dQ = dw Q1-Q2 = W Thermal efficiency of heat engineIt is denoted by . Thus
= 9et :or" done !le(0 )
total amount if heat a;sor;ed !le ….
(36)
=61−62
61
= 1 -62
61
As some heat is always rejected to the
sink , . 62<0 , therefore efficiency is
always less than 1 i.e. thermal
efficiency of heat engine is always
less than 100 % .
For 62 = 0 efficiency = 1 =100% i.e.
the engine will have 100% efficiency
in converting heat into work . The first law of thermodynamics does
not rule out a heat engine with 100%
efficiency. However practical
experience shows that efficiency is
less than 100% even, if we eliminate
all sorts of losses associated withactual heat engines.
12.22PRINCIPLE OF A HEAT PUMP
or REFRI-GERATOR
A refrigerator as we all know is a
device used for cooling things. It is
also called a heat pump.
An ideal refrigerator can be regardedas Carnot’s ideal heat engine working
in the reverse direction. Thus in a refrigerator, the working
substance would absorb a certain
quantity heat 62 from the sink at
lower temperature. T 2 and reject a
larger amount of heat6
1 to the
source at higher temperature T 1
with the help of an external agency
supplying the necessary energy to
the system.In a refrigerator, the working
substance (usually in gaseous form)
goes through the following steps :
Figure :8.10
(a)Sudden expression of the gas from
high pressure to low pressure,
resulting in cooling of the gas
321

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 322/422
Physics XI
EEE Consortium
converting it into vapour–liquid
mixture.(b)This mixture absorbs heat from the
region to be cooled and getsconverted into vapours
(c)The vapours get heated in account of
external work done in the system by
the supply of electric power to the
refrigerator.(d)The heated vapours then release the
heat to the surroundings, bringing
them to the initial state after
completing the cycle.
In the cycle of changes the working
substance returns to its initial state,
therefore, there is no change in its
internal energy. i.e. dU = 0
If 62 = amount of heat extracted per
cycle from the cold reservoir at lowertemperature T 2 .
W = work done /cycle on the system –
the refrigerant.61=¿ amount of heat released
/cycle to the source (surrounding air
at higher temperature T 1 )
ThenNet amount of heat absorbed,
dQ = 62−61
Work done on the system dW = -W
According to the first law of
thermodynamicsdQ = dU + dW62−61
= 0 –WOr
…. (37)
Coefficient of performance of a
refrigerator
Coefficient of performance of a
refrigerator (β ) is defined as the ratio
of quantity of heat removed per cycle
from the contents of refrigerator (62¿
to the energy spent per cycle (W) to
remove this heat .
i.e. ,
β =62
0
Or
β =
62/61
1−62
61
In a Carnot Cycle,
62
61 =
T 2T 1
Therefore, β =
T 2T 1
1−T 2T 1 …. (39)
Or
…. (40)
322
=61−62
? =

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 323/422
Physics XI
EEE Consortium
If is efficiency of Carnot cycle, then
1 -T 2T 1=ƞ
Therefore 1 – = T 2T 1
Discussion
1.Coefficient of performance of a
refrigerator stands for efficiency of
refrigerator .thus higher the value of
β more efficient is the refrigerator.
2.Eqn
(40) shows that smaller is the value of (T 1−T 2¿ greater is the
value of β i.e. smaller is the difference
in temperature of atmosphere and
food stuff to be cooled, more efficient
will be the refrigerator.
As the refrigerator works T 2 goes on
decreasing due to formation of ice.T 1 is almost constant. Therefore β
decreases when the refrigerator is
defrosted,T 2 increase and hence β
increases.Thus defrosting is
necessary for better working of
refrigerator.
3.A refrigerator cannot work withoutsome external work done on the
system, i.e. W is never zero. Hence β
= 62 /W cannot be infinite, i.e.
coefficient of performance of a
refrigerator can never be infinite.
12.23SECOND LAW THERMODYNAMICS
Kelvin−Planck Statement
It is not possible to design a heat
engine which works in cyclic process
and whose only result is to take heat
from a body at a single temperature
and convert it completely into
mechanical work.Clausius Statement
It is impossible for a self-acting
machine, unaided by any external
agency, to transfer heat from a body
at lower temperature to another at
higher temperature.
12.24REVERSIBLE AND IR-
REVERSIBLE PROCESSES
• Reversible process is the one which
can be retraced in opposite order
by changing external conditions
slightly.• Those processes which cannot be
retraced in opposite order byreversing the controlling factors are
known as irreversible process.
323

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 324/422
Physics XI
EEE Consortium
• It is a consequence of second law
that all the natural processes are
irreversible process.
• Conditions for reversibility of aprocess are(i) Process is performed quasi-
statically(ii) it is not accompanied by any
dissipative effects.• It is impossible to satisfy these two
conditions perfectly, thus
reversible process is purely an
ideal abstraction.
12.25CARNOT'S HEAT ENGINESadi Carnot devised an ideal cycle of
operation for a heat engine, in the
year 1824 .This is cycle came to be
known as Carnot cycle. The machine
used for realizing this ideal cycle of
operation is called an ideal heat
engine or Carnot heat engine.
Construction
The essential parts of an ideal heat
engine or Carnot engine are as shown
in fig 8.12
Figure 8.11
(I) Source of heat: The source is
maintained at a fixed higher
temperature T1, from which the working substance draws heat .
The source is supposed to
possess infinite thermal capacity
and as such any amount of heat
can be draw from it without
changing its temperature.(II) Sink of heat: The sink is
maintained at a fixed lowertemperature T 2 to which any
amount of heat can be rejected
by the working substance. It has
only infinite thermal capacity
and as such its temperature
remains constant at T 2 , even
when any amount of heat isgiven to it .
(III) Working substance: A perfect
gas acts as the working
substance. It is contained in a
cylinder with non – conducting
sided but having a perfect
conducting base. This cylinder is
fitted with perfectly non –conducting and frictionless
piston.
324

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 325/422
Physics XI
EEE Consortium
Apart from these essential parts,
there is a perfectly insulating stand
or pad on which the cylinder can be
placed. It would isolate the workingsubstance completely from the
surroundings. Hence the gas can
undergo adiabatic changes.
Theory
The Carnot cycle consist of the
following four stages:
1.Isothermal expansion2.Adiabatic expansion3.Isothermal expansion4.Adiabatic expansion
The cycle is carried out with the help
of the Carnot engine as detailed
below:Consider one gram mole of an ideal
gas enclosed in the cylinder. Let% 1
, (1 , T 1 be the initial volume,
temperature of the gas . The initial
state of the gas is represented by the
point A on P-V diagram, fig 8.13. We
shall assume that all the four
processes are quasi-state and non-
dissipative the two conditions for
their reversibility. According to second law of
thermodynamics,no heat engine can
have 100% efficiency
Carnot’s heat engine is an idealized
heat engine that has maximum
possible efficiency consistent with
the second law.Cycle through which working
substance passed in Carnot’s engine
is known as Carnot’s Cycle.Carnot's engine works between two
temperatures
T1 - temperature of hot reservoir
T2 - temperature of cold reservoirIn a Complete Carnot's Cycle system
is taken from temperature T1 to
T2 and then back from temperature
T2 to T1. We have taken ideal gas as the
working substance of Carnot's
engine.Figure below is an indicator diagram
for Carnot's Cycle of an ideal gas
Figure8.
12
1. Isothermal expansion
In step b→c isothermal expansion of
gas taken place and thermodynamic
325

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 326/422
Physics XI
EEE Consortium
variables of gas changes from (P1,
V1,T1) to (P2,V2,T1)If Q1 is the amount of heat absorbed
by working substance from thesource and W1 the work done by the
gas then
61=0 1=∫% 1
% 2
( d%
= R T 1 loge
% 2% 1 ……………….(41)
2. Adiabatic expansion
Step c→d is an adiabatic expansion
of gas from (P2, V2, T1) to (P3,V3,T2). Work done by gas in adiabatic
expansion is given by
0 2 = ∫% 2
% 3
(d% =
1−¿¿
R (% 2−% 2)¿
……………….(42)3. Isothermal compression
Step d→a is iso-thermal compression
of gas from (P3,V3,T2) to (P4,V4,T2).Heat Q2 would be released by the gas
to the at temperature T2 Work done on the gas by the
environment is
62=0 3=∫% 3
% 4
− (d% =- R T 2 loge
% 4% 3
= R T 2 loge
% 3% 4 ……………….
(43)
4. Adiabatic compression
Step a→b is adiabatic compression of
gas from (P4, V4, T2) to (P1, V1, T1)
Work done on the gas is0 4 = ∫
% 4
% 1
− (d%
=
1−¿− RT (T 2−T 1)
¿ ……………….
(44)
Work done by engine per cycle
Net work (W) done by the gas in acomplete cycle
W = 0 1+0 2−(0 3+0 4)
From (42) and (44)0 2=0 4 in magnitude
0 = 0 1−0 3
12.26EFFICIENCY OF CARNOT
ENGINE
It is defined as the ratio of net
mechanical work done per cycle y the
gas (W) from the source (61¿ i.e.
== :
61
Using (36)
==61−62
61 = 1 -
62
61 …
(45)326
=

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 327/422
Physics XI
EEE Consortium
Referring to fig 8.13, as A (% 1 / (1 )
and B (% 2 /(2 ) lie on the same
isothermal, Therefore, (1% 1= (2% 2 … (46)
As, B(% 2 / (2 ) and C(% 3 /(3 ) lie on
the same adiabatic , (2% 2 = (3% 3 … (47)
Again C(% 3 / (3¿∧ 2 (% 4 / (4) lie on the
same isothermal ,
Therefore (3% 3= (4 % 4 … (48)
Finally, D(% 4 / (4 ¿ and A(% 1 / (1 ¿ lie
on the same adiabatic (4 % 4
= (1 % 1
… (49)
Multiplying (52) ,(53),(54) and (55)( (1% 1 ) ( (2 % 2
) ( (3% 3 ) ( (4% 4)
(2% 2
¿¿ )( (3% 3
¿( (4% 4)
( (1% 1
¿
% 1% 2
% 3% 4
= % 2% 3
% 4 % 1
Or (% 2% 4 )−1
= (% 1% 3)−1
Or% 2% 4=% 1 % 3
i.e.,% 2% 1
=% 3% 4
so that log% 2% 1 =
log% 3% 4 … (50)
Dividing (47) and (45) we get
62
61
= R T 1 loge
% 3% 4
R T 1loge
% 2% 1
=T 2T 1
i.e. … (51)
==1−T 2T 1 ..... (52)
Discussion
1.Eqn (52) reveals that the efficiency
of Carnot heat engine depends inthe temperature of source T 1
and temperature of sink T 2 . 4 ut
the efficiency does not depend
upon the nature of the working
substance.2. As RHS of eqn (52) is less than 1 ,
therefore efficiency of Carnot heatengine is less than 100%
3.Forƞ = 1(i.e. 100 %) eitherT 1=$∨T 2=0 &
As source at infinite temperature
or sink at 0K are not attainable,
Carnot heat engine cannot have
100 % efficiency
4.If T 2=T 1 , then from (52) , = 0Ƞ
i.e. the Carnot engine shall not
work. Hence it is not possible to
convert heat energy into
327
62 =T 2T

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 328/422
Physics XI
EEE Consortium
mechanical work unless source
and sink of heat ate at different
temperatures.
5.From eqn (51) we find that62
6 1
=T 2T 1
When T 2 ≠0
i.e. some heat must be rejected to
the sink. Hence efficiency of even
an ideal heat engine can never be
100 %
6.Note that Carnot engine is a
reversible engine. Therefore, each
step of Carnot cycle can be
reversed.
12.27CARNOT’S THEOREM
• Working between the two given
temperatures of the hot (T1) and cold(T2) reservoirs, efficiency of no engine
can be more than that of a Carnot
engine.• Efficiency of the Carnot engine is
independent of the nature of the
working substance• For a Carnot cycle
…….(53)It is independent of the nature of the
system.
Example 12
Carnot engine takes in a thousand
kilo calories of heat from a reservoir
at a 627o
C and exhausts it to a
sink at 627o
3 . How much work
does it perform? What is the
efficiency of the engine ?Solution:-
Here 61 = 1000Kcal =
106 cal
T 1=627o C = 627 + 273 = 900 K
T 2=627o
C = 300 K ; W = ?
*s 62
6 1
=T 2T 1
=300
900 x 106 cals
=
1
3
x
10
3
cal
Work done per cycle W = 61 -
62 =2
3 x 10
6
cal .
=2 x 4.2
3 x10
−6
J = 2.8 x 10-6
J
Also ƞ=1−T 2T 1 = 1 -
300900
= 66.667 %
Example 13
328

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 329/422
Physics XI
EEE Consortium
A Carnot engine has its reservoir at
900°C and sink at 3°C.What is the
efficiency of the Carnot engine?
Solution:- Temperature of the reservoir,T1 = 900°C = 900 + 273 =1173 K. Temperature of the sink,T2 = 3°C = 3 + 273 = 276 KEfficiency of Carnot engine,
Therefore, the efficiency of the Carnot
engine is 76.5 %.
Example 14
A diatomic ideal gas is used as a
working substance in a Carnot
engine. The gas undergoes an
adiabatic expansion as a part of the
cycle. This increases its volume from
V to 16 V. What is the efficiency ofCarnot engine?Solution:-
The equation for an adiabatic process
is given as TV γ−1 = constantSo, T1L1 γ−1= T2L2 γ−1
Using the given information V1 = V
V2= 16 V We have T1 V γ−1 = T2(16 V) γ−1
Here, as gas is diatomic γ = 7/5So
or
T1 = 3.03 T2 The efficiency of the Carnot engine
will be
or
So, the efficiency will beη = 0.66 or 66%Example 15
In a typical cannot engine the
temperature of two heat reservoirs
are T1 = 1000° C and T2 = 250° C. If
the temperature T2 is decreased by
50° and T1 is increased by 100° C
then the new efficiency of the Carnot
engine will be?Solution:-
The efficiency of a Carnot engine is
given as
Here, T1 = 1000° C + 100° C = 1100°and T2 = 250° C – 50° C = 200° C
Example 16
Calculate the least amount of work
that must be done to freeze one gram
329

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 330/422
Physics XI
EEE Consortium
of water at 0o
3 by means of
refrigerator. Temp. of surrounding is
27o
3 .How much heat is passed on
to the surroundings in this process ?Solution:-
Here, W = ? , m = 1 gT 2 = 0
o3 = 273 K
T 1 = 27o
3 = 300 K , 61 = ?
62 = mL = 1 x 80 = 80 cal = 80 x
4.2 JCoeff. of performance =
62
0 =
T 2T 1−T 2
W =80 x 4.2 (300−273 )
273
= 33. 22 joule =
33.22
4.2 = 7.91
calHeat passed on to surroundings,
61=62+0 = 80 + 7.91 = 87.91 cal.
Exercise
1 Mark questions
1.Which Thermo dynamical variable
is defined by the first law of
thermodynamics?
2.What is the amount of work donein the Cyclic process?
3.Out of the parameters-
temperature, pressure, work and
volume, which parameter does not
characterize the thermodynamics
state of matter?4.What is the nature of P-V diagram
for isobaric and isochoric process?5.On what factors does the
efficiency of Carnot engine
depends?
2 Marks questions
6.If hot air rises, why is it cooler at
the top of mountain than near the
sea level?
7.What happen to the internal
energy of a gas during (i)
isothermal expansion (ii) adiabatic
Expansion?8.Air pressure in a car increases
during driving. Explain Why?
9.The efficiency of a heat enginecannot be 100%. Explain why?
10.In an effort to cool a kitchen
during summer, the refrigerator
door is left open and the kitchen
330

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 331/422
Physics XI
EEE Consortium
door and windows are closed. Will
it make the room cooler?
3 Marks questions.
11.State the first law of
thermodynamics and discussed
the application of this law to the
boiling process.12.What is thermodynamic
system? Prove that work done by
thermodynamic system is equal
to the area under P-V diagram.13.Prove that Cp - Cv = R , for an
ideal gas .
5 Marks questions
14. What is isothermal process?
State two essential conditions for
such a process to takes place.
Show analytically that the work by
one mole of an ideal gas during
volume expansion from V1 to V2 at
temperature T is given by : W = RT logeV2/V115. Define an adiabatic process.
State two essential conditions for
such a process to takes place.
Derive an expression for adiabatic
process to takes place.
MULTIPLE CHOICE QUESTIONS
1.The thermal state of a body is
defined bya)Heat
b)Temperaturec)Coldd)Specific heat
2.The heat energy required to raise
the temperature of 1 kg of
substance through 1°C is calleda)Heat b)Specific heatc)Latent heat
d)Temperature3.The specific heat of a solida)Is a constant independent of
temperature b)Varies linearly with
temperaturec)First increases with
temperature and then attains a
constant value
d)First decreases withtemperature and then attains a
constant value4.The specific heat of a gas hasa)Only one unique value b)Only two values CP and C Vc)Any value lying between 0 and
infinity depending on the
process.d)Is always zero5.The branch of physics which
deals with relation between heat
and mechanical energy is calleda)Heat
331

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 332/422
Physics XI
EEE Consortium
b)Thermodynamicsc)Thermoelectricityd)Calorimetry
6.In an isothermal processa)Pressure remains constant b)Thermal energy remains
constantc)Volume remains constantd)Temperature remains constant
332

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 333/422
Physics XI
EEE Consortium
333

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 334/422
Physics XI
EEE Consortium
334

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 335/422
Physics XI
EEE Consortium
13.1 Introduction
Thegas laws developed by Boyle,
Charles, and Gay-Lussac are based
upon empirical observations and
describe the behavior of a gas inmacroscopic terms, that is, in terms
of properties that a person can
directly observe and experience. An
alternative approach to
understanding the behavior of a gas
is to begin with the atomic theory,
which states that all substances are
composed of a large number of verysmall particles (molecules or atoms).
In principle, the observable
properties of gas (pressure, volume,
temperature) are the consequence of
the actions of the molecules making
up the gas.
13.2 BEHAVIOUR OF GASESOne of the most amazing things
about gases is that, despite wide
differences inchemical properties, all
the gases more or less obey thegas
laws. The gas laws deal with how
gases behave with respect to
pressure, volume, temperature, and
amount.Gases are the only state of matter
that can be compressed very tightly
or expanded to fill a very large space.
335

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 336/422
Physics XI
EEE Consortium
13.2.1 Boyle's Law: The Pressure-
Volume LawBoyle's law or the pressure-volume
law states that the volume of a givenamount of gas held at constant
temperature varies inversely with the
applied pressure when the
temperature and mass are constant.
Another way to describing it is saying
that their products are constant.
P1V1 =P2V2 =P3V3 = constant …(eq.
1) The graph (fig. 13.1) below shows
that Boyle's law is strictly not obeyed
by gases at all values of P and T but
it obeys this law only at low pressure
and high temperature.
Fig. 13.1 Graph between P and V at
temperature T1 and T2 such that T1<T2
13.2.2 Charles' Law: The
Temperature-Volume Law
Charles' law or the temperature-
volume law the states that the
volume of a given amount of gas held
at constant pressure is directlyproportional to the Kelvin
temperature.V T
V1/T1 =V2/T2 =V3/T3 =constant (eq.
2) The graph (fig. 13.2) below shows
that experimental graph deviates
fromstraight line. Theoretical and
experimental graphs are in
agreement at high temperature.
Fig. 13.2 Graph between T and V
13.2.3 Gay-Lussac's Law: The
Pressure Temperature LawGay-Lussac's law or the pressure
temperature law states that the
pressure of a given amount of gas
held at constant volume is directly
proportional to the Kelvintemperature.
P TP1/T1 =P2/T2 =P3/T3 =constant (eq.
3)336

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 337/422
Physics XI
EEE Consortium
13.2.4 Avogadro's Law: The
Volume Amount Law
It gives the relationship between
volume and amount when pressure
and temperature are held constant.
Remember amount is measured in
moles. Also, since volume is one of
the variables, that means the
container holding the gas is flexible
in some way and can expand orcontract.If the amount of gas in a container is
increased, the volume increases. If
the amount of gas in a container is
decreased, the volume decreases.V n This means that the volume-amount
fraction will always be the same value
if the pressure and temperature
remain constant.
V1/n1 =V2/n2 =V3/n3=constant (eq.
4)
13.2.5 The Ideal Gas Law
The previous laws all assume that
the gas being measured is anideal
gas, a gas that obeys them all
exactly. But over a wide range of
temperature, pressure, and volume,
real gases deviate slightly from ideal.
Since, according to Avogadro, the
same volumes of gas contain the
same number of moles, chemistscould now determine the formulas of
gaseous elements and their formula
masses. The ideal gas law is:
PV =nRT …(eq. 5) Wheren is the number of moles of
the number of moles andR is a
constant called theuniversal gas
constant and is equal to
approximately8.314 JK−1mol−1
The graph between is almost
a straight line parallel to pressure
axis as shown in the graph (fig.13.3)
below.
However, the behaviour of real gasesapproaches the behaviour of ideal gas
at low pressure and high
temperatures.
337

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 338/422
Physics XI
EEE Consortium
Fig. 13.3 graph (T1>T2>T3)
13.2.6 Dalton's Law of Partial
Pressures
Dalton's Law of Partial
Pressures states that the total
pressure of a mixture of non-reacting
gases is the sum of their individual
partial pressures.Ptotal =Pa +Pb +Pc + ... …(eq. 6)
Or
Or
The pressure in a flask containing a
mixture of 1 mole of 0.20 mole
O2 and 0.80 mole N2 would be thesame as the same flask holding 1
mole of O2.Partial pressures are useful when
gases are collected by bubbling
through water (displacement). The
gas collected is saturated in water
vapour which contributes to the total
number of moles of gas in thecontainer.
13.2.7 Non-Ideal Gases
The ideal gas equation ( PV= nRT )
provides a valuable model of the
relations between volume, pressure,
temperature and number of particlesin a gas. As an ideal model it serves
as a reference for the behaviour of
real gases. The ideal gas equation
makes some simplifying assumptions
which are obviously not quite true.
Real molecules do have volume and
do attract each other. All gases
depart from ideal behaviour underconditions of low temperature (when
liquefaction begins) and high
pressure (molecules are more crowed
so the volume of the molecule
becomes important). Refinements to
the ideal gas equation can be made to
correct for these deviations.
In 1873 J. D. Van der Waalsproposed his equation, known as the
Van der Waals equation. As there are
attractive forces between molecules,
the pressure is lower than the ideal
value. To account for this the
pressure term is augmented by an
attractive force term a/V2. Likewise
real molecules have a volume. The volume of the molecules is
represented by the term b. The term
b is a function of a spherical
diameter d known as the van der
338

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 339/422
Physics XI
EEE Consortium
Waals diameter. The van der Waals
equation forn moles of gas is:
…(eq. 7)
Example 13.1
Figure shows plot ofPV/T versusP
for 1.00×10 –3 kg of oxygen gas at two
different temperatures.
(a) What does the dotted plot signify?(b) Which is true:T1 >T2 orT1 <T2?
(c) What is the value ofPV/T wherethe curves meet on they-axis?(d) If we obtained similar plots for
1.00×10 –3 kg of hydrogen, would we
get the same value ofPV/Tat the
point where the curves meet on the
y-axis? If not, what mass of hydrogen
yields the same value ofPV/T(for low
pressure high temperature region ofthe plot) ? (Molecular mass of H2 =
2.02 u, of O2 = 32.0 u,R= 8.31 J
mo1 –1 K –1.)Solution:
(a)The dotted line in the given graph
indicates that the ideal behavior of
the gas, i.e., the ratio PV/T is
equal to nR (n is the number ofmoles and R is the universal gas
constant) which is a constant
quantity.(b)T1 > T2 is true for the given graph.
The dotted line in the given graph
represents an ideal gas. The curve
of the gas at temperature T1 is
closer to the dotted line than thecurve of the gas at temperature T2.
A real gas approaches the behavior
of an ideal gas when its
temperature increases.(c)The value of PV/T, where two
curves meet is nR.For an ideal gas PV = nRTPV/T = nRMolecular mass of oxygen =
32.0 gMass of oxygen = 1 x 10-3 kg
= 1 gR = 8.314 J mole-1 K-1
Thus, the value of PV/T =
0.26 J K-1
Example 13.2 Two thermally insulated vessels 1
and 2 are filled with air at
temperatures (T1and T2), volumes (V1and V2) and pressures (P1 and P2)
respectively. If the valve joining the339

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 340/422
Physics XI
EEE Consortium
two vessels is opened, what will be
the temperature inside the vessel at
equilibrium?
Solution: Total number of moles µ = µ1 + µ2
Or
Or
using Boyle’s law,
Example 13.3
A vessel contains two non reactive
gases : neon (monatomic) and oxygen
(diatomic). The ratio of their partial
pressures is 3:2. Estimate the ratio of
(i) number of molecules and (ii) massdensity of neon and oxygen in the
vessel. Atomic mass of Ne = 20.2 u,
molecular mass of O2 = 32.0 u.Solution:
Partial pressure of a gas in a mixture
is the pressure it would have for the
same volume and temperature if it
alone occupied the vessel. (The totalpressure of a mixture of non-reactive
gases is the sum of partial pressures
due to its constituent gases.) Each
gas (assumed ideal) obeys the gas
law. SinceVandTare common to the
two gases, we haveP1V= μ1 RTand
P2V= μ2 RT, i.e. (P1/P2) = (μ1 / μ2).
Here 1 and 2 refer to neon andoxygen respectively. Since (P1/P2) =
(3/2) (given), (μ1/ μ2) = 3/2.
13.3 KINETIC THEORY OF AN
IDEAL GAS
The kinetic theory of gases can
explain many everyday observations.
Have you ever wondered why water
boils faster at higher altitudes? Or
why inflatable pool toys seem flat
after sitting in a cold garage? How
about why you can smell a candle all
throughout the house? All of these
phenomena and many more can beexplained by the kinetic theory of
gases. The kinetic theory of gases (also
known as kinetic-molecular theory) is
a law that explains the behavior of a
hypothetical ideal gas. According to
this theory, gases are made up of tiny
particles in random, straight line
motion. They move rapidly and
continuously and make collisions
with each other and the walls. This
was the first theory to describe gas
pressure in terms of collisions with340

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 341/422
Physics XI
EEE Consortium
the walls of the container, rather
than from static forces that push the
molecules apart. Kinetic theory also
explains how the different sizes of theparticles in a gas can give them
different, individual speeds.
Postulates of Kinetic Theory
Kinetic theory of gases makes many
assumptions in order to explain the
reasons gases act the way they do.
According to kinetic theory of gases:
1.Gases consist of particles in
constant, random motion. They
continue in a straight line until they
collide with something—usually each
other or the walls of their container.
Fig. 13.4
2. Particles
are point masses with no volume.
The particles are so small comparedto the space between them, that we
do not consider their size in ideal
gases.
3. No molecular forces are at work.
This means that there is no
attraction or repulsion between the
particles.4. Gas pressure is due to the
molecules colliding with the walls of
the container. All of these collisions
are perfectly elastic, meaning that
there is no change in energy of either
the particles or the wall upon
collision. No energy is lost or gained
from collisions.5. The time it takes to collide is
negligible compared with the time
between collisions.6. The kinetic energy of a gas is a
measure of its Kelvin temperature.
Individual gas molecules have
different speeds, but the temperature
and kinetic energy of the gas refer to
the average of these speeds.7. The average kinetic energy of a gas
particle is directly proportional to the
temperature. An increase in
temperature increases the speed in
which the gas molecules move.8. All gases at a given temperature
have the same average kinetic energy.
9. Lighter gas molecules move fasterthan heavier molecules.
341

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 342/422
Physics XI
EEE Consortium
An ideal gas does not exist - the
nearest we have to it is helium remote
from its liquefying point.
13.4Pressure of an Ideal Gas
Consider a fixed mass ‘M’ of gas
enclosed in a cubical container of
side ‘L’. Let each particle of the gas
have mass ‘m’ and let there be ‘N’
particles. Considering one of the
millions of particles in the gas is
moving towards the wall shaded ingrey, as shown in the figure 13.5.
Let, the x-component of velocity is u1towards the wall and the x-
component of momentum is mu1towards the wall. When the particle hits the wall it will
bounce back with the same speed
but in the opposite direction (because
kinetic energy is conserved in the
elastic collision). The x-component of
momentum after collision will then
be –mu1. The change in momentum∆p = mu1 - (-mu1 ) = 2m u1
The particle has to travel a distance
2L (from the grey wall to the opposite
face and back again) before it next
collides with the grey wall.Now, time = distance / velocity =
2L / u1so the rate of change of momentum
due to a collision with a wall will be: ∆p / ∆t = 2m u1 / (2L/ u1) = m u12 /
LBy Newton's second law, the rate of
change of momentum is equal to
force, so mu12/L is the force exerted
on the particle by the wall during the
collision. By Newton's third law, the
particle exerts an equal but
oppositely directed force on the wall,
and so we can say that: The force on the wall during the
collision
=m u12 / LNow it isn’t only one particle that hits
the wall – there are N particles so
their x-components of velocity are
going to beu1, u2,…. uN. The total force, F, will therefore be
F =mu12/L + mu22/L + mu32/L….. +
muN2/L
= m/ L ( u12+ u22+ u32... + uN2)
Now, pressure on that wall will be
force/contact area =F/A, but A = L2
Therefore pressure on the wall due to
gas
342

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 343/422
Physics XI
EEE Consortium
p = m/ L3( u12+ u2
2+ u32... + uN
2)
We can work out the mean square
velocity is the x direction from this:
( u12
+ u22
+ u32
... + uN2
) = Nū2
So now we know that the total
pressure due to the u-components of
the velocities of the particles will be:
p = m/ L3 Nū2
So far we have only looked at the x
component of the velocities. It is now
time to look at the other two
components (v- along y axis and w-along z axis ) and to add them into
the equation.
c2 = u2 + v2 + w 2
So, it follows that this is true for the
mean square velocities also.
<c2> = <u2 > + <v2 > + <w 2>
Since there are large numbers ofmolecules and they are moving
randomly the mean square
components are equal to each other
(random movement means there is no
preferred direction). We can therefore
say that
<c2> = 3 <u2> or 1/3 <c2> = <u2>
We can now replace our mean square velocity component with one related
to the mean square velocity itself.P = m N<c2> / 3 L3 and as L3= V
We get pV = 1/3 Nmc2rms…(eq. 8)
Now, density = mass / volume, M =
Nm is the total mass and L3 is the
volume,
Therefore P = 1/3 ρ<c2> …(eq. 9)
13.5 Kinetic Interpretation of
Temperature
To investigate the relationship
between molecular kinetic energy and
temperature, let us multiply both
side by V pV = 1/3 ρ V<c2>
as ρ = M/V
so pV = 1/3 M<c2> =1/3 Nm<c2>
=2/3 N( ½ m<c2>)
Now using the ideal gas equation
or …(eq. 10)
Both R and N A are universal
constants, and therefore so also is
R/NA; it is called Boltzmann'sconstant, ‘k’ and it is the gas
constant per particle. The left-hand
term is the average translational
343

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 344/422
Physics XI
EEE Consortium
kinetic energy of a single molecule,
and therefore Average translational kinetic energy
of a particle of gas = 3/2 KT …(eq.11)
Example 13.4
Calculate the root mean square
speed, urms, in m/s of helium at 30oC.Solution:
M= (4.00g/mol)×1kg/1000gM= 4.00×10−3kg/mol
Now, using the equationfor urms substitute in the proper
values for each variable and perform
the calculation.urms = √(3RT/M)urms=1.37×103m/s
Example 13.5
An ideal gas A is there. Initial
temperature is 27°C. The
temperature of the gas is increased to
927°C. Find the ratio of final Vrms to
the initial Vrms Solution:
Vrms=√3RT/MSo it is proportional to Temperature
Now
T1=27°C=300K T2=927°C=1200K
So
Intial vrms = k√300
Final Vrms= k√1200
Ratio of final Vrms to intial Vrms = 2:1
13.6 Degrees of freedom
The degrees of freedom of a
dynamical system are defined as the
total number of independent
quantities or coordinates required to
describe completely the position and
configuration [arrangement of the
constituent atoms in space] of thesystem.
[A] System of one particle:Consider
a system of one particle [point mass]
moving along a straight line, say
along X-axis.its position at any
instant is completely known by its
displacement along X-axis. Hence, it
has one translational degree of
freedom.
If the particle moves in a plane, say
X-Y plane, then two coordinates
[x,y]are required to know its positionat any instant , which can be
determined by knowing the
displacement of the particle along X-
344

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 345/422
Physics XI
EEE Consortium
axis and Y-axis. Hence, it has two
translational degrees of freedom.If the particle is moving in a space,
its position at any instant can bedetermined by knowing the
displacement of the particle along X-
axis, Y-axis and Z-axis .Hence such a
particle has three translational
degrees of freedom.
[B] System of two particles:Let us
now consider a system consisting oftwo particles [two point masses].Let
[x1,y1,z1] and [x2,y2,z2]be the
coordinates of the two particles
respectively .
Each particle has three degrees of
freedom [coordinates].Thus to
describe this system, six coordinates
are required. If two particles remain
at a fixed distance from each other,
there is a definite relation between
them. Hence only five independentcoordinates are required to describe
the configuration of the system.
Therefore, degrees of freedom of this
system is 6-1=5.
In general we can say that the
number of degrees of freedom of a
system is equal to the total number
of coordinates required to specify theposition of its constituent particles
minus the number of independent
relations among the particles.If N=number of particles in the
systemK=number of independent relations
among the particles Then the number of degrees of
freedom of the system isF = 3N – K …(eq. 12)
13.6.1 Calculation of Degrees of
freedom of a gas molecule
[A]Monatomic gas molecule: The
molecule of a monatomic gas
molecule like Helium, neon, Argon,
etc consists of a single atom. It iscapable of translator motion only and
hence has three degrees of freedom.
Here N = 1, K = 0 from eq.(12) f = 3x1 – 0 = 3
345

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 346/422
Physics XI
EEE Consortium
[B]Diatomic gas molecule: The
molecule of a diatomic gas molecule
like Hydrogen, Oxygen, Nitrogen, etcconsists of two atoms separated by a
fixed distance. Considering the
translator motion of its centre of
mass, it has three translational
dergree of freedom. In addition to this
the the molecule can also rotate
about three axes x, y and z. (Figure
……)Rotation along the line joining the
atoms has very small moment of
inertia, thus the molecule has two
rotational degrees of freedom. Hence
the diatomic molecule in all has five
degrees of freedom.
Here N = 2, K = 1 from eq …(12) f
= 3x2 – 1 = 5
At high temperature ( 5000 K), a
diatomic molecule has two additional
degrees of freedom due to vibrational
motion. Each vibrational motion is
associated with kinetic and potential
energies, so one degree of freedom of
vibrational motion is taken as two.
[C] Triatomic gas molecule: They
are of two types linear and non
linear.
In a linear molecule like Carbon
dioxide, Hydrogen Cyanide, etc, the
three atoms are arranged along a
straight line such that they have twoindependent relations.Here N = 3, K = 2
from eq …(12) f = 3x3 – 2 = 7In a non linear molecule like water,
Sulphur dioxide, etc, the three atoms
are located at the three vertices of a
triangle such that that there are
three fixed distances amongst thethree atoms.Here N = 3, K = 2 (as the distances
between the atoms are fixed).
from eq …(12) f = 3x3 – 3 = 6
13.6.2 Degrees of freedom of a
solid
Atom in a solid cannot move from oneposition to another and cannot rotate
about the given axis of rotation.
Therefore, the atom in a solid does
not possess translational energy and
rotational energy. At high temperature, each atom can
only vibrate about its equilibrium
position so it has only Vibrationalenergy. Vibrational energy of an atom is the
sum of kinetic and potential energy.
Since it can vibrate along the three
346

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 347/422
Physics XI
EEE Consortium
axis, therefore the atom in a solid has
six degrees of freedom at high
temperature.
13.6.3 Degrees of freedom of arigid body
A rigid body of finite size can undergo
translation as well as rotational
motion about any axis. Rotational
motion can also be resolved into
three mutually perpendicular
components. Hence, a rigid body will
have six degrees of freedom, three fortranslatory motion and three for
rotatory motion.
13.7 Law of equi-partition of
energy
Consider a molecule of a gas of mass
m, moving with velocity v. the kinetic
energy of translational of themolecule isEt = ½ mv2 = ½ mv x2 + ½ mv y2 + ½
mvz2 (... v2 = v x2 + v y2 + vz2)
…(eq. 13)In thermal equilibrium at
temperature T, the average value of
translational energy of the molecule
is< Et > = < ½ mv x2> + < ½ mv y2 > + <½
mvz2> …(eq. 13) As there is no preferred direction of
motion, so the average kinetic energy
of the gas molecule along all the
three directions is equal. Thus from equation (13)
<½ mv x2
>= <½ mv y2
> = <½ mvz2
>=½kT A gas molecule moving in space has
three degrees of freedom. So, the
energy associated with each gas
molecule per degree of freedom is ½
kT, which is the law of equipartition
of energy.
In case of diatomic gas molecule, in
addition to three translational
degrees of freedom, each molecule
has two rotational degrees of
freedom. Thus total energy of a
diatomic gas molecule is the sum of
transnational energy Et and
rotational energy Er, i.e.,Et + Er = (½ mv x2 + ½ mv y2 + ½ mvz2)
+ ( ½ I1 w12 + ½ I2 w22) …(eq.14)
here and are angular speeds
about the Y and Z axes and the
corresponding moment of inertia
about these axes are I1 and I2.If the two atoms of a diatomic
molecule vibrate along the inter-atomic axis like one-dimensional
oscillator and contribute Vibrational
energy E v. It involves kinetic energy of
347

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 348/422
Physics XI
EEE Consortium
vibration as well as potential energy
of the pair of atoms.E v = ½ mv2 + ½ kr2
where m is the mass of the molecule,k is the force constant of the
oscillator, r is the separation between
the atoms and v = dr/dtHence the total energy of a molecule
isE = Et + Er + Ev =(½ mv x2 + ½ mv y2 + ½ mvz2) + ( ½
I1 w12 + ½ I2 w22) + ( ½ mv2 + ½ kr2 )
…(eq. 15)
An important feature in this equation
is that while each translational and
rotational degree of freedom has
contributed only one squared term in
equation(15), one vibrational mode
contributes two squared terms :
kinetic and potential energies. Eachquadratic term occurring in
equation---( 15 ), is a mode of
absorption of energy by molecule. We
have also proved that in thermal
equilibrium at absolute temperature
T, for each translational mode (i.e.,
degree of freedom) the average energy
is ½ kB T. The most importantprinciple of classical statistical
mechanics (first proved by Maxwell)
states that:
In thermal equilibrium at absolute
temperature T, the total energy is
equally distributed in all possible
energy modes, with each modehaving an average energy equal to ½
kB T. This is called the law of
equipartation of energy.Hence, according to this law, each
translational and rotational degree of
freedom of a molecule contributes ½
kB T to the energy, while each
vibrational frequency contributes 2 x ½ kB T = kB T, since a vibrational
mode has both kinetic and potential
energy modes.
Example 13.6
Calculate the total number of degrees
of freedom possessed by the
molecules in one cm3 of H2 at NTP.Solution:
22400 cm3 of every gas contains 6.02
X 1023 molecules.... Numbers of molecules in 1cm3 of
H2 gas = 6.02 X 1023 / 22400 =
0.26875 X 1020
Number of degrees of freedom of a H2
gas molecule = 5 ... Total number of degrees of
freedom of 0.26875 X 1020 molecules= 0.26875 X 1020 X 5
= 1.34375 X 1020
348

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 349/422
Physics XI
EEE Consortium
13.8 Specific Heat Capacity of
gases
The specific heat of gases can be
predicted theoretically on the basis oflaw of equipartation of energy.
Consider one mole of an ideal gas at
temperature T whose each molecule
has f degrees of freedom. According
to the law of equipartation of energy,
energy associated with each molecule
per degree of freedom = ½ kB T.
Total internal energy of one mole ofthe gas,
U = f (½ kB T)N A = RT (as kB = ) Thus, molar specific heat capacity at
constant volume,
C v =dU/dt = d( RT)/dt = R …(eq.
16)Now, the molar specific heat capacity
at constant pressure,
Cp = C v+ R = R + r …(eq. 17)(since for an ideal gas Cp – Cv = R) The ratio of two molar specific heat
capacities is
…(eq. 18)a)Monatomic gas :
As in this case, f = 3From equation (16),(17) and (18),
= 2.98 cal/mol0C = 12.5 J/mol K
= 4.96 cal/mol0C = 20.8 J/mol K
andIt has been observed that the values
of obtained experimentally for
mono-atomic gases like Argon,
Helium agree very well with the
theoretical value obtained above. b)Diatomic gas:
(i)When the diatomic gas molecule is a
rigid rotator like a dumbbell, f = 5
Thus cal/mol0C= 4.96 cal/mol0C = 20.8 J/mol K
cal/mol0C= 6.95 cal/mol0C = 29.1 J/mol K
and(ii) When the diatomic gas molecule is
not a rigid rotator but has an
349

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 350/422
Physics XI
EEE Consortium
additional vibrational mode. In this
case, f = 7
Thuscal/mol0C= 6.95 cal/mol0C = 29.1 J/mol
K
cal/mol0C= 8.93 cal/mol0C = 37.4 J/mol
K
andc)Polyatomic gas:
In general a polyatomic gas
molecule has three translations,
three rotational degrees of freedom
and number of vibrational modes.
So f = 6+2
Thus
and The theoretical predictions for
specific heats of gases ignoring the
vibrational modes are in good
agreement with experimental values
of specific heats of several gases.
Although, there are discrepancies between the predicted and actual
values of specific heats of several
other gases like Cl2, C2H6 and many
other polyatomic gases. Usually the
experimental values are greater than
the predicted values of specific heats.
However, by including vibrational
modes of motion in the calculations,the values are in close agreement
with each other. Thus, the law of
equipartition of energy is verified at
ordinary temperatures.
Specific Heat Capacity of Solids
In 1819 Dulong and Petit found
experimentally that for many solidsat room temperature, the molar
specific heat is 3R. This is consistent with equi-partition
theory: energy added to solids takes
the form of atomic vibrations and
both kinetic and potential energy is
associated with the three degrees of
freedom of each atom.
350

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 351/422
Physics XI
EEE Consortium
Average vibrational energy per atom= 6 x ½kBT = 3kBT The total vibrational energy or the
internal energy of one mole of atoms
of solid, U = NA x 3 kB T= 3 RTNow at constant pressure ∆Q = ∆U +
P ∆V, since for a solid ∆V is negligible.
Hence,C = ∆Q/ ∆T = ∆U/ ∆t = 3R≈ 25 J/K mol
It signifies that the heat required toraise the temperature of a sample of
a solid depends on the total number
of atoms present in the sample and
not on their atomic masses. So the
molar specific heat of solids is same
near the room temperature. Table showing specific heats of some
elements
At low
temperatures, however, the molar
heat falls below 3R, and eventually
approaches zero at 0 K. At very low
temperatures, the molar heat
capacity varies roughly as the cube of
the temperature. This behaviour was first explained by
Einstein in 1906 by using quantum
theory and further improved byDebye in 1915.The temperature at
which the molar specific heat of a
solid at constant volume becomes
equal to 3R is called as Debye
temperature.
Specific Heat Capacity of Water
We treat water like a solid made up ofthree atoms: two hydrogen and one
oxygen. For each atom average energy is 3kBT.So it hasU= 3 × 3kBT×NA= 9RT
351

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 352/422
Physics XI
EEE Consortium
andC= ∆Q/ ∆T= ∆U/ ∆T= 9R= 74.7 JK-1mol-1
In cgs system, water is defined to
have unit specific heat,i.e., C = 1 cal g-1 K-1 = 4.179 J g-1 K-
1
For 1 mole of water, C = 18 x 4.179
J mole-1 K-1 = 75.22 J mole-1 K-1
Clearly, the predicted value and
observed value of molar specific heat
of water are in good agreement with
each other.
Lastly, we should note an importantaspect specific heat capacities
predicted on the basis of law of
equipartion of energy are
independent of temperature.
However at low temperaturesspecific
heats of all substances approach zero
as temperature approaches zero. Thisis related to the fact that degrees of
freedom get frozen and ineffective at
low temperatures.
According to classical physics degrees
of freedom must remain unchanged
at all times. The behaviour of specific
heats at low temperatures shows theinadequacy of classical physics.
Quantum mechanics requires a
minimum, nonzero amount of energy
before a degree of freedom comes into
play. This is also the reason why
vibrational degrees of freedom come
into play only in some cases.
Example 13.8
A cylinder of fixed capacity 44.8 litres
contains helium gas at standard
temperature and pressure. What is
the amount of heat needed to raise
the temperature of the gas in the
cylinder by 15.0 °C? (R= 8.31 Jmo1 –
1
K –1
).Solution:
Using the gas law PV= nRT, it can
easily be shown that 1 mol of any
(ideal) gas at standard temperature
(273 K) and pressure (1 atm = 1.01 ×
105 Pa) occupies a volume of 22.4
litres. This universal volume is called
molar volume. Thus the cylinder in this example
contains 2 mol of helium.
Further, since helium is monatomic,
its predicted (and observed) molar
specific heat at constant volume,Cv
= (3/2)R, and molar specific heat at
constant pressure,Cp= (3/2)R + R=
(5/2)R.
Since the volume of the cylinder is
fixed, the heat required is determined
byCv. Therefore,
352

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 353/422
Physics XI
EEE Consortium
Heat required = no. of moles × molar
specific heat × rise in temperature
= 2 × 1.5R× 15.0 = 45R
= 45 × 8.31 = 374 J.13.9 Mean free path
On the basis of kinetic theory of
gases, it is assumed that the
molecules of a gas are continuously
colliding against each other.
Molecules move in straight line with
constant speeds between two
successive collisions. Thus path of a
single molecule is a series of zig-zag
paths of different lengths. Thesepaths of different lengths are called
free paths of the molecule. Mean Free
Path is the average distance traversed
by molecule between two successive
collisions.
For finding the mean free path let us
consider a gas containing n
molecules per unit volume.
We assume that only one molecule
which is under consideration is in
motion while all others are at rest. If
d is the diameter of each moleculethen the moving molecule will collide
with all these molecules whose
centers lie within a distance d from
its centre as shown in figure.If v is the velocity of the moving
molecule then in one second it will
collide with all molecules with in a
distance d between the centers. Inone second it will cover a volume
πd2 v.If n is the total number of
molecules per unit volume, then
number of collisions a molecule
suffers in one second= nπd2 vIf s is the total path travelled in
N collisions, then mean free pathλ = s / NIf v is the distance traversed by
molecule in one second then mean
free path is given byλ = total distance traversed in one
second / number of collision suffered
by the molecules = v/πσ2 vn
= 1/πd2n This expression was derived with the
assumption that all the molecules are
at rest except the one which is
colliding with the others.
353

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 354/422
Physics XI
EEE Consortium
More exact statement can be derived
considering that all molecules are
moving with all possible velocities in
all possible directions. More exactrelation found using distribution law
of molecular speeds isλ=1/(√2)πd2n= 1/(√2) πd2N/V …(eq. 19)
its derivation is beyond the scope of
this book.
From the above relation, we can say as gas density increases,the molecules become closer to each
other. Therefore, they are more likely
to run into each other, so the mean
free path decreases.Increasing the number of molecules
or decreasing the volume causes
density to increase. This decreases
the mean free path. On increasingthe radii of the molecules the space
between them decreases, causing
them to run into each other more
often. Therefore, the mean free path
decreases. Pressure, temperature,
and other factors that affect density
can indirectly affect mean free path.
Example 13.9
Determine the mean free path of
argon molecules under normal
conditions.Solution:
Given: The molecule diameter is0.4 nm. The mean free path of molecules
is given by
Here k = 1.38 X 10-23 T = 273.15 K
P = 1.01325 X 10
5
Pad = 4 X 10-10 m
Exercise
Multiple Choice Questions
1.The kinetic - molecular theory
explains the behavior of
(a)Gases only.(b)Solids and liquids.(c)Liquids and gases.(d)Solids, liquids and gases.
2.If the temperature of 50.0 L of a
gas at 40.0ºC falls by 10.0Cº, what
is the new volume of the gas if the
pressure is constant?
(a)45 l(b)48.4 l(c) 52 l(d)55 l
354

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 355/422
Physics XI
EEE Consortium
3.Which one is not the assumption
in kinetic theory of gases?(a) The molecules of the gas are in
continuous random motion(b) The molecules interact during
the collison
(c) The molecules are tiny hard
sphere undergoing inelastic
collision
(d) The collison are of short
duration
4.Which of the following is trueaccording to Vander Waal gas
equation?
(a) The attractive forces between
the molecules is not negligible
(b) Volume of the molecules is
negligible as compared to the
volume occupied by the gas
(c) Volume of the molecules is notnegligible as compared to the
volume occupied by the gas
(d) The attractive forces between
the molecules is negligible
5.Mean square velocity of five
molecules of velocities 2 m/s, 3
m/s, 4 m/s, 5 m/s and 6 m/s is(a) 10 m2/s2
(b) 18 m2/s2
(c) 20 m2/s2
(d) 15 m2/s2
6.If for a gas this gas is
made up of molecules which are
(a) Diatomic(b) Mixture of diatomic and
polyatomic(c) Mono atomic(d) Polyatomic
7.The average translational kinetic
energy of the molecules of a gas
depends on
(a) the number of moles and thetemperature.
(b) the pressure and the
temperature(c) the pressure only. (d) the temperature only.
8.An ideal gas is enclosed in a
sealed container. Upon heating,
which property of the gas does
not change?a)Volume b)Pressurec)The rate of collisions of the
molecules with each otherd)The rate of collisions of the
molecules with the walls of
the container
9.Under which conditions do real
gases most resemble ideal gases?
(a)low pressure and low
temperature355

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 356/422
Physics XI
EEE Consortium
(b)high pressure and low
temperature(c) low pressure and high
temperature(d)high pressure and high
temperature
Questions
10.Air pressure in a car tyre increases
during driving? Why?11.What is the rms speed of a nitrogen
molecule at room temperaturepredicted by the kinetic theory of
gases? (mass of a molecule of N2 is
4.68 x 10 –26 kg )12.If a vessel contains 1 mole of O2 gas
(molar mass 32) at temperature T.
The pressure of the gas is P. What is
the pressure if an identical vessel
contains 1 mole of He at a
temperature 2 T?13.The mean free path for O2
molecules at a temperature of 300 K
and at 1.00 atm pressure is 7.10 ×
10 –8 m. Use this data to estimate the
size of an O2 molecule.14.An ideal gas in a cylinder fitted
with a piston (Figure 17-20) is held
at fixed pressure. If the temperatureof the gas increases from 50° to
100°C, by what factor does the
volume change?
15.Which speed is greater, the
speed of sound in a gas or the
rms speed of the molecules of the
gas? Justify your answer, usingthe appropriate formulas, and
explain why your answer is
intuitively plausible.
16.What are the mole fractions and
partial pressures of each gas in a
2.50 mL container into which
100.00 g of nitrogen and 100.00 g of
carbon dioxide are added at 25°C? What is the total pressure?18.If air is filled in a vessel at the
temperature of 600C. To what
temperature should it be heated in
order that 1/3rd of air may escape
out of vessel?19.The density of water is 1000 kg m –
3
. The density of water vapour at 100°C and 1 atm pressure is 0.6 kg m–
3. The volume of a molecule
multiplied by the total number gives,
what is called, molecular volume.
Estimate the ratio (or fraction) of the
molecular volume to the total
volume occupied by the water
vapour under the above conditions
of temperature and pressure.20.A vessel contains two nonreactive
gases: neon (monatomic) and oxygen
(diatomic). The ratio of their partial
pressures is 3:2. Estimate the ratio
356

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 357/422
Physics XI
EEE Consortium
of (i) number of molecules and (ii)
mass density of neon and oxygen in
the vessel. Atomic mass of Ne = 20.2
u, molecular mass of O2 = 32.0 u.21.A flask contains argon and chlorine
in the ratio of 2:1 by mass. The
temperature of the mixture is 27 °C.
Obtain the ratio of (i) average kinetic
energy per molecule, and (ii) root
mean square speed vrms of the
molecules of the two gases. Atomic
mass of argon = 39.9 u; Molecular
mass of chlorine = 70.9 u.22.Uranium has two isotopes of
masses 235 and 238 units. If both
are present in Uranium hexafluoride
gas which would have the larger
average speed? If atomic mass of
fluorine is 19 units, estimate the
percentage difference in speeds at
any temperature.23.A cylinder of fixed capacity 44.8
litres contains helium gas at
standard temperature and pressure.
What is the amount of heat needed
to raise the temperature of the gas
in the cylinder by 15.0°C? (R= 8.31
J mo1 –1 K –1).
357

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 358/422
Physics XI
EEE Consortium
358

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 359/422
Physics XI
EEE Consortium
359

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 360/422
Physics XI
EEE Consortium
360

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 361/422
Physics XI
EEE Consortium
361

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 362/422
Physics XI
EEE Consortium
14.1 Introduction The world is full of things that move.
The motion of physical systems can
be classified into two broad
categories-translatory and vibratory
or oscillatory. If the position of a body
varies linearly with time, its motion is
translatory, e.g. a train moving on a
straight track or a ball rolling on the
ground. A motion that repeats itself
in equal intervals of time is called
periodic motion. e.g. the motion of
the hands of a clock. If a particle in
periodic motion moves back and forth
over the same path, its motion is
called vibratory or oscillatory. Some
examples of oscillatory motion are
the oscillation of the hands of a
walking person, the balance wheel of
a watch, the bob of a pendulum
clock, a mass attached to a spring,
the prongs of a tuning fork, the
piston of an automobile engine, etc.
Oscillations may be very complex,
such as those of a piano string or
those of the earth during an
earthquake. It may be remarked thatmechanical systems are not the only
ones that can oscillate. The atoms in
a solid vibrate. The electrons in a
radiating or receiving antenna are in
oscillation. A tuned circuit in a radio
can oscillate electromagnetically.
Radiowaves, microwaves and visible
light are simply oscillating electric
and magnetic fields. Thus a study ofoscillations is essential for the
understanding of various physical
systems- mechanical, acoustical,
electrical and atomic. Any motion that repeats itself after
regular intervals of time is known as
a periodic motion. The examples of
periodic motion are the motion ofplanets around the Sun, motion of
hands of a clock, motion of the
balance wheel of a watch, motion of
Halley’s comet around the Sun
observable on the Earth once in 76
years.If a body moves back and forth
repeatedly about a mean position, itis said to possessoscillatory motion.
Vibrations of guitar strings, motion
ofa pendulum bob, vibrations of a
tuning fork, oscillations of mass
suspended from a spring, vibrations
of diaphragm in telephones and
speaker system
and freely suspended springs are fewexamples of oscillatory motion. In all
the above cases of vibrations of
bodies, the path of vibration is
always directed towards the mean or
362

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 363/422
Physics XI
EEE Consortium
equilibrium position. The oscillations
can be expressed in terms of simple
harmonic functions like sine or
cosine function.
Harmonic oscillation
Harmonic oscillation is that
oscillation which can be expressed in
terms of single harmonic function
(sine function or cosine function).
Fig. 1.1 Representation of a SHM wave.
A harmonic oscillation of constant
amplitude and single frequency is
calledsimple harmonic motion (SHM).
Periodic and non-periodic function
Any function which repeats itself
after regular intervals of time is
called periodic function.f(t) = sin ωtf(t + T) = sin ω(t +T) = sin 2π/T (t + T) = sin (2πt/T + 2π) = sin 2π/T = sin
ωt.Non-periodic functions do not repeat
after regular intervals of time.
Simple Harmonic Motion
A particle is said to execute simple
harmonic motion if its acceleration is
directly proportional to the
displacement from a fixed point and isalways directed towards that point.
Consider a particle P executing SHM
along a straight line between A and B
about the mean position O (Fig. 1.2).
Fig.1.2 simple harmonic motion of aparticle.
The acceleration of the particle is
always directed towards a fixed point
on the line and its magnitude isproportional to the displacement of
the particle from this point. a ∞yBy definitiona = -ω2y where ω is a constant known as
angular frequency of the simple
harmonic motion.
The negative sign indicates that theacceleration is opposite to the
direction of displacement. Ifmis the
mass of the particle, restoring force
363

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 364/422
Physics XI
EEE Consortium
that tends to bring back the particle
to the mean position is given byF = -m ω2y or F = -k y
The constantk =m ω
2
, is called forceconstant or spring constant. Its unit
isNm-1. The restoring force is directed
towards the mean position.
Thus, simple harmonic motion is
defined as oscillatory motion about a
fixed point in which the restoring force
is always proportional to the
displacement and directed always
towards that fixed point.
Simple Harmonic Motion
From our concept of a simple
harmonic oscillator we can derive
rules for the motion of such a system.
We start with our basic force
formula,F = -kx UsingNewton's Second Law, we can
substitute for force in terms of
acceleration:ma = -kxHere we have a direct relation
between position and acceleration.
For you calculus types, the above
equation is a differential equation,and can be solved quite easily.Note: The following derivation is not
important for a non- calculus based
course, but allows us to fully
describe the motion of a simple
harmonic oscillator.Deriving the Equation for Simple
Harmonic MotionRearranging our equation in terms of
derivatives, we see that:
m = -kx
or
+ x = 0
Let us interpret this equation. The
second derivative of a function
ofx plus the function itself (times a
constant) is equal to zero. Thus the
second derivative of our function
must have the same form as the
function itself. What readily comes tomind is the sine and cosine function.
Let us come up with a trial solution
to our differential equation, and see if
it works. As a tentative solution, we write:x =a cos(ωt) wherea andω are constants.
Differentiating this equation, we see
that
= -aω sin(ωt)and
= -aω 2cos(ωt)
364

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 365/422
Physics XI
EEE Consortium
Plugging this into our original
differential equation, we see that:
-aω 2cos(ωt) + a cos(ωt) = 0
It is clear that, ifω 2 = , then the
equation is satisfied. Thus the equation governing simple
harmonic oscillation is:
x =a cos t
The Equation for Simple Harmonic
Motion
From the equation for simple
harmonic motion we can tell a lot
about the motion of a harmonic
system. First of all,x is maximum
when the cosine function is equal to
1, or whenx =a . Thus a in this
equation is the amplitude of
oscillation, which we have already
denoted byx m . Secondly, we can find
the period of oscillation of the
system. Att = 0 ,x =x m .
Also, att = 2Π ,x =x m .Since both these instances have the
same position, the time between the
two gives us our period of oscillation.
Thus:
T = 2Π and
ν = =Finally,
ω= 2Πν =
Note that the values of period and
frequency depend only on the mass
of the block and the spring constant.
No matter what initial displacement
is given to the block, it will oscillate
at the same frequency. This concept
is important. A block with a small
displacement will move with slower
velocity, but with the same frequency
as a block with a large displacement.So now we know thata =x m. In
addition we can take the time
derivative of our equation to generate
a full set of equations for simple
harmonic motion:
x=x mcos(ωt) v=-ωx msin(ωt) a=-ω2 x mcos(ωt)
The projection of uniform circular
motion on a diameter is SHM
Consider a particle moving along the
Circumference of a circle of radiusaand centre O, with uniform speedv,
in anticlockwise direction as shown
in Fig. 1.1.
365

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 366/422
Physics XI
EEE Consortium
Let XX’ and YY’ be the two
perpendicular diameters.
Fig. 1.3 Projection of circular motion.
Suppose the particle is at P after a
time ‘t’. If ω is the angular velocity,
then the angular displacement θ in
time t is given by θ = ωt.FromP drawPN perpendicular toYY.
As the particle moves from X toY,
foot of the perpendicularN moves
fromO toY. As it moves further from
Y to X ‘,then from X’ toY’ and back
again to X, the pointN moves fromY
toO, from O toY' and back again to
O. When the particle completes one
revolution along the circumference,
the pointN completes one vibration about the
mean positionO. The motion of the
pointN along the diameterYY’ is
simple harmonic.Hence, the projection of a uniform
circular motion on a diameter of a
circle is simple harmonic motion.
Displacement in SHM
The distance travelled by the
vibrating particle at any instant of
time t from its mean position isknown as displacement. When the particle is atP, the
displacement of the particle alongY
axis isy. Then, inOPN,∆ sin θ = ON =y = OPsin θy = OPsinωt (θ = ωt)Since OP =a, the radius of the circle,
@ the displacement of the vibratingparticle isy =asinωt ...(1)
The amplitude of the vibrating particle
is defined as its maximum
displacement from the mean position.
Velocity in SHM The rate of change of displacement is
the velocity of the vibrating particle.Differentiating eqn. (1) with respect
to timetdy/dt = d/dt (a sin ωt) ∴ v =a cosωt The velocityv of the particle moving
along the circle can also be obtained
byresolving it into two components.(i)vcos θ in a direction parallel to OY(ii)v sin θ in a direction
perpendicular toOY
366

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 367/422
Physics XI
EEE Consortium
Figure showing velocity of particle executing
SHM
The componentv sinθ has no effect
alongYOY' since it is perpendiculartoOY.∴ velocity =vcosθ=vcosωt We know that,linear velocity = radius×angular
velocity∴v =aω∴ velocity =aωcosωt∴ velocity =aω √(1- sin2ωt)
velocity =aω √(1-y2/a2)@ sinθ = y/a velocity = ω √(a2 – y2)Special cases
(i) When the particle is at mean
position, (i.e)y = 0. velocity is aω and is
maximum.v = ± aω is calledvelocity amplitude.(ii) When the particle is in the
extreme position i.e y = ± a, the
velocity is zero.
Acceleration in SHM
The rate of change of velocity is the
acceleration of the vibrating particle.d2 y/dt2 =d/dt(a ω
cosωt) = -ω2a sin ωt∴ acceleration = d2 y/dt2 = -ω2 y.
The negative sign indicates that the
acceleration is always opposite to the
direction of displacement and is
directed towards the centre.
Special Cases(i) When the particle is at the mean
position (i.e)y = 0, the acceleration is
zero.(ii) When the particle is at the
extreme position i.e, y =+a,
acceleration is±a ω2 which is called
asacceleration amplitude.
The differential equation of simple
harmonic motion is
d2 y/dt2 + ω2 y = 0.
Using the above equations, the
values of displacement, velocity and
acceleration for the SHM are given in
the Table 1.1.
It will be clear from the above, that at
the mean positiony = 0, velocity of
367

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 368/422
Physics XI
EEE Consortium
the particle is maximum but
acceleration is zero.
At extreme position y = ±a, the velocity is zero but the acceleration is
maximum ±a ω2 acting in the
opposite direction.
Table 1.1 - Displacement, Velocity and
Acceleration
Time Phas
e
ωt
y v=
ω√(a2 – y2)
a =
-ω2 y.
t=0
t=T/4
t=T/2
t=3T/
4
t=T
0
π/2
π
3π/2
2π
0
+a
0
-a
0
aω
0
- aω
0
aω
0
-ω2a
0
ω2a
0
Graphical Representation of SHMGraphical representation of
displacement velocity and
acceleration of a particle vibrating
simple harmonically with respect to
time t is shown in Fig. 1.4Displacement graph is a sine curve.
Maximum displacement of the
particle is y= ±a.
Fig. 14.4 Graphical representation.
(ii) The velocity of the vibrating
particle is maximum at the mean
position i.e v =± aω and it is zero
at the extreme position.(iii) The acceleration of the vibrating
particle is zero at the mean position
and maximum at the extremeposition (i.e)±a ω2. The velocity is ahead of displacement
by a phase angle of π/2. The
acceleration is ahead of the velocity
by a phase angle π/2 or by a phase π
ahead of displacement. (i.e) when the
displacement has its greatest positive
value, acceleration has its negativemaximum value or vice-versa.Some Important terms in SHM
(i) Time period
368

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 369/422
Physics XI
EEE Consortium
The time taken by a particle to
complete one oscillation is called time
period T.
In the Fig. 1.1, as the particle Pcompletes one revolution with
angular velocity ω, the foot of the
perpendicular N drawn to the
vertical diameter completes one
vibration. HenceT is the time period.
Then ω = 2π/T or T = 2π/ω.
The displacement of a particleexecuting simple harmonic motion
may be expressed asy(t) =a sin2πt/T ...... (1)
Or y(t) =a cos 2πt/T ....... (2) WhereT represents the time period,
‘a’ represents maximum
displacement
(amplitude).
These functions repeat when t is
replaced by (t +T).y (t +T)=a sin 2π (t+ T)/T ........(3) = a sin( 2πt/T + 2π ) =a sin2πt/T = y(t)In generaly (t +nT) =y (t)
Above functions are examples ofperiodic function with time periodT.
It is clear that the motion repeats
after a timeT = 2π/ω where ω is the
angular frequency of the motion. In
one revolution, the angle covered bya
particle is 2ω in timeT.
(ii) Frequency and angular frequency
The number of oscillations produced
by the body in one second is known
as frequency. It is represented by n.
The time period to complete one
oscillation is 1/n. T =1/nshows the time period is the
reciprocal of the frequency. Its unit ishertz. ω = 2π/n, is called as angular
frequency. It is expressed in rad s-1.
(iii) Phase
The phase of a particle vibrating in
SHM is the state of the particle as
regards to its direction of motion and
position at any instant of time.
In the equationy =a sin (ωt + φo) the
term (ωt +φo) = φ, is known as the
phase of the vibrating particle.
(iv) Epoch
It is the initial phase of the vibrating
particle (i.e) phase at t = 0.
∴φ = φo (@ φ = ωt + φo)
The phase of a vibrating particle
changes with time but the epoch is
phase constant.
369

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 370/422
Physics XI
EEE Consortium
Fig. 14.5 (a) (b)
(i) If the particleP starts from the
position X, the phase of the particle
is zero.(ii) Instead of counting the time from
the instant the particle is at X, it is
counted from the instant when thereference particle is at A(Fig. 1.5a).
Then XOP = ωt -φoHere (ωt -φo) = φ is called the phase
of the vibrating particle. (-φo) is initial
phase or e poch.(iii) If the time is counted from the
instant the particleP is above X (i.e)
atB [Fig. 1.5b] then (ωt + φo) = φ.Here (+φo) is theinitial phase.
Phase difference
If two vibrating particles executing
SHM with same time period, cross
their respective mean positions at the
same time in the same direction, they
are said to be in phase.If the two vibrating particles cross
their respective mean position at the
same time but in the opposite
direction, they are said to be out of
phase (i.e they have a phase
difference of π).If the vibrating motions are
represented by equationsy1 =a sinωt andy2 =a sin (ωt - φ)then the phase difference between
their phase angles is equal to the
phase difference between the two
motions.∴phase difference = ωt- φ – ωt= - φ
negative sign indicates that the
second motion lags behind the first.Ify2 =a sin (ωt + φ), Then phase difference = ωt + φ - ωt =
φHere the second motion leads the
first motion. We have discussed the SHM without
taking into account the cause of the
motion which can be a force (linear
SHM) or a torque (angular SHM).
Example 14.1
A harmonic oscillation is represented
by : y = 0.34 cos (3000t + 0.74) where y and t are in mm and sec
respectively. Deduce (i) its amplitude
(ii) its frequency (iii) its time period
(iv) angular frequency and (v) initial
phase.Solution:
y = 0.34 cos (3000t + 0.74)Comparing with general equation, y = a cos (ωt + φ)
370

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 371/422
Physics XI
EEE Consortium
a = 0.34 mm, ω = 3000 rad/s, φ=
0.74 rad
(i) ω=2πn, frequency n =ω/2π
= 1500/π Hz(ii) ω=2π/T, T=0.0021 sec(iii) ω = 3000 rad/s(iv) φ= 0.74 rad
Example 14.2
A body oscillates with SHM,
according to the equation, y = 5 m
cos [(2π)t + π/4]. At t=1.5 sec,
calculate the (i) displacement (ii)speed and (iii) acceleration of the
body.Solution:
Here, ω = 2π rad/s, T= 2π/ω =1 sec,
t=1.5 sec
(i) Displacement y = 5 m cos [(2π rad/s) 1.5 +
π/4]= 5m cos [3π = π/4] = -5 cos
π/4= -3.535 m
(ii) Velocity v = dx/dt= -5 m 2π sin[(2π rad/s)t +
π/4]= -5 x 2π sin [3π + π/4]
=5x 2π x sin π/4= 22.22 m/s
(iii) Acceleration = dv/dt= -ω2 y= - [4π2][-3.535]= 139.56 m/s2
Energy In Simple Harmonic Motion
The total energy (E) of an oscillating
particle is equal to the sum of its
kinetic energy and potential energy if
conservative force acts on it. The
velocity of a particle executing SHM
at a position where its displacement
isy from its mean position isv =
ω√(a2-y2)Kinetic Energy
Kinetic energy of the particle of mass
misK= ½ m [ω√(a2-y2)]2
K= ½ m ω2(a2-y2) -----
(1) Potential energy
From definition of SHM F = –ky the
work done by the force duringthe
small displacementdy isdW = -F.dy = -(-ky)dy =kydy∴ Total work done for the
displacementyis, W= dW= kydy W= m ω2 y dy @[k =m ω2]
∴ W= ½ m ω2 y2
This work done is stored in the body
as potential energyU =½ m ω2 y2 ......(2)
Total energy E = K + U =½ m ω2(a2-y2) + ½ m ω2 y2
E = ½ m ω2 a2
371

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 372/422
Physics XI
EEE Consortium
Thus we find that the total energy of
a particle executing simple harmonic
motion is E = ½ m ω2 a2
Special cases
(i)When the particle is at the mean
positiony = 0, from eqn (1) it is
known that kinetic energy is
maximum and from eqn. (2) it is
known that potential energy is
zero. Hence the total energy is
wholly kinetic E =Kmax= ½ m ω2 a2
(ii) When the particle is at the
extreme position y =+a, from eqn.
(1) it is known that kinetic energy
is zero and from eqn. (2) it is
known that Potential energy is
maximum. Hence the total energy
is wholly potential.E = Umax= ½ m ω2 a2
Graphical Representation of
Energy
The values ofK andU in terms ofE
for different values ofyare given in
the Table 1.2.
The variation of energy of anoscillating particle with the
displacement can be represented in
a graph as shown in the Fig. 1.6.
Fig. 14.6 Energy-displacement graph.
Example 14.3
A particle executes SHM of amplitude
‘a’. At what distance from the mean
position its KE equals to its PE?Solution:
KE = ½ m ω2(a2-y2)PE = ½ m ω2 y2
As KE =PE½ m ω2(a2-y2) = ½ m ω2 y2
(a2-y2) = y2
Y =a/√2 = 0.71 a
Some Examples of SHM
(i) Horizontal and vertical oscillations
of a loaded spring.(ii) Vertical oscillation of water in a U-
tube(iii) Oscillations of a floating cylinder(iv) Oscillations of a simple pendulum
(v) Vibrations of the prongs of atuning fork.
Dynamics of Harmonic Oscillations
372

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 373/422
Physics XI
EEE Consortium
The oscillations of a physical system
results from two basic properties
namely elasticity and inertia. Let us
consider a body displaced from amean position. The restoring force
brings the body to the mean position.
(i) At extreme position when the
displacement is maximum, velocity is
zero. The acceleration becomes
maximum and directed towards the
mean position.
(ii) Under the influence of restoring
force, the body comes back to the
mean position and overshoots
because of negative velocity gained at
the mean position.
(iii) When the displacement is
negative maximum, the velocity becomes zero and the acceleration is
maximum in the positive direction.
Hence the body moves towards the
mean position. Again when the
displacement is zero in the mean
position velocity becomes positive.
(iv)Due to inertia the body overshootsthe mean position once again. This
process repeats itself periodically.
Hence the system oscillates. The
restoring force is directly proportional
to the displacement and directed
towards the mean position.(i.e)F ∞ - y
F = -ky ............. (1) Wherek is the force constant defined
as the force required to give unit
displacement. It is expressed in N m-
1.From Newton’s second law,
F =ma ..........(2)∴ -k y=maOr a= -(k/m)y .........(3)
From definition of SHM accelerationa = -ω2y
The acceleration is directly
proportional to the negative of the
displacement. The acceleration is directly
proportional to the negative of the
displacement.Comparing the above equations we
get,ω = √(k/m)...(4) Therefore the period of SHM isT =2π/ω = 2π √(m/k)
Horizontal Oscillations Of Spring
Consider a mass(m) attached to anend of a spiral spring (which obeys
Hooke’s law) whose other end is fixed
to a support as shown in Fig. 6.9.
The body is placed on a smooth
373

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 374/422
Physics XI
EEE Consortium
horizontal surface. Let the body be
displaced through a distance x
towards right and released. It will
oscillate about its mean position. Therestoring force acts in the opposite
direction and is proportional to the
displacement.∴ Restoring forceF = -kx.From Newton’s second law,F =ma∴ ma= -k x a=-(k/m)x
Comparing with the equation of SHMa = -ω2 x we get,ω2= k/m or ω = √(k/m)ButT =2π/ω Time periodT= 2π√(m/k)
∴ Frequencyn = 1/T
n= 1
2π √ "
m
Fig 14.7 Linear Harmonic Oscillator
Vertical Oscillations Of A Spring
Fig 1.8a shows a light, elastic spiral
spring suspended vertically from a
rigid support in a relaxed position.
When a mass ‘m’ is attachedto the spring as in Fig. 1.8b, the
spring is extended by a small lengthdl such that the upward force F
exerted by the spring is equal to the
weightmg. The restoring force is F = -kdl =mg ...(1) wherek is spring constant.If we further extend the given spring
by a small distance by applying a
small force by our finger, the springoscillates up and down about its
mean position. Now suppose the
body is at a distance y above the
equilibrium position as in Fig. 1.8c.
The extension of the spring is (dl -y).
The upward force exerted on the body
isk(dl- y) and the resultant forceF
on the body isF =k (dl- y) -mg = -ky ...(2) The resultant force is proportional to
the displacement of the body from its
equilibrium position and the motion
is simple harmonic.If the total extension produced is (dl
+y) as in Fig. 1.8d the restoring force
on the body isk(dl +y) which actsupwards.So, the increase in the upward force
on the spring isk(dl +y) -mg =ky
374

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 375/422
Physics XI
EEE Consortium
Therefore if we produce an extension
downward then the restoring force in
the spring increases byky in the
upward direction. As the force acts inthe opposite direction to that of
Fig. 14.8 Vertical Oscillations of loaded
Spring
displacement, the restoring force isF = -ky
and the motion is SHM. ma =-ky
a =-(k/m) ya = -ω2y ......(3)(expression for SHM)
Comparing the above equations,ω = √(k/m)---(4)
ButT =2π/ω = 2π √(m/k) ......(5)From equation (1)mg =k lm/k = l/g
Therefore time periodT =2π√(l/g) --- (6)Frequencyn = 1/T = [1/2π ]√(g/l)
Case1: When two springs are
connected in Parallel
Two springs of spring factorsk1 and
k2suspended from a rigid support as
shown in Fig.1.9 A load m is attached
to the combination.Let the load be pulled downwards
through a distance y from its
equilibrium position. The increase in
length isy for both the springs but
their restoring forces are different.IfF1andF2are the restoring forces,
then,F1= = -k1y and F2= = -k2y
Fig.14.9 Springs in parallel
∴ Total restoring force =F= (F1+F2) = -( k1+k2 )ySo, time period of the body is given
by T =2π √(m/( k1+k2 )Ifk1 = k2 = k, T =2π √(m/( 2k)
∴ frequency n = 1/T = [1/2π ]
√(2k/m)
Case2: When two springs are
connected in series.
375

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 376/422
Physics XI
EEE Consortium
Two springs are connected in series
in two different ways. This
arrangement is shown in Fig. 1.10a
and 1.10b.
Fig 14.10 (a) (b)
WhereF is the restoring force. Total extension,y =y1 + y2 = -F[1/k1 + 1/k2]
We know thatF = -ky ∴y = -F/k
Oscillations of A Simple Pendulum
A simple pendulum consists of mass-
less and inelastic thread whose oneend is fixed to a rigid support and a
small bob of massm is suspended
from the other end of the thread. Let
l be the length of the pendulum.
When the bob is slightly displaced
and released, it oscillates about its
equilibrium position. Fig.1.11 shows
the displaced position of thependulum.
Suppose the thread makes an angle θ
with the vertical. The distance of the
bob from the equilibrium position A
is AB. AtB, the weightmg acts
vertically downwards. This force is
resolved into two components.(i) The component mg cosθ is
balanced by the tension in the thread
acting along the length towards the
fixed point O.(ii)mg sinθ which is unbalanced, acts
perpendicular to the length of thread.
This force tends to restore the bob to
the mean position. If the amplitude ofoscillation is small, then the path of
the bob is a straight line. ∴F = -mg sin θ ...(1)If the angular displacement is smallsin θ= θ∴F = -mgθ -- (2)
Fig.14.11 Simple Pendulum
But θ = x/l
∴F = - mg x/lComparing this equation with
Newton’s second law,F = ma we get,
accelerationa =gx/l ..........(3)
376

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 377/422
Physics XI
EEE Consortium
(negative sign indicates that the
direction of acceleration is opposite to
the displacement)
Hence the motion of simplependulum is SHM. We know thata = -ω2xComparing this with ..... (3)ω2=g/l , ω = √(g/l) ....... (4)time periodT = 2π/ ω =2π√(l/g) – (5)frequency n = 1/T = 1/2π √(g/l) -- (6)
Oscillation of Liquid Column in a
U – TubeConsider a non viscous liquid column
of lengthl of uniform cross-sectional
area A (Fig. 6.13).Initially the level of
liquid in the limbs is the same. If the
liquid on one side of the tube is
depressed by blowing gently the
levels of the liquid oscillates for a
short time about their initialpositions O and C, before coming to
rest. If the liquid in one of the limbs
is depressed byy, there will be a
difference of 2y in the liquid levels in
the two limbs. At some instant,
suppose the level of the liquid on the
left side of the tube is atD, at a
Fig.1.12 Oscillations of a liquid column in U-tube
heighty above its original positionO,the levelB of the liquid on the other
side is then at a depthy below its
original position C. So the excess
pressure P on the liquid due to the
restoring force isP = excess height× density ×gP = 2yρg
∴ Force on the liquid = pressure ×areaof the cross-section of the tubeF =– 2 yρg × A ..... (1) The negative sign indicates that the
force towards O is opposite to the
displacement measured from O at
that instant. The mass of the liquid column of
lengthlis volume × density ;m =lAρ∴ F =l Aρa .... (2)
From equations (1) and (2)l Aρa = - 2y Aρg
377

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 378/422
Physics XI
EEE Consortium
∴a = –2gy/l .......(3) We know thata =-ω2y(i.e)a = –2gy/l= –ω2y where ω = √(2g/l)
Here, the acceleration is proportional
to the displacement, so the motion is
simple harmonic and the time period
T= 2π/ ω =2π√(l/2g) ..... (3)
Types of oscillations
There are three main types ofoscillations.(i) Free oscillations
When a body vibrates with its own
natural frequency, it is said to execute
free oscillations.
The frequency of oscillations depends
on the inertial factor and spring
factor, which is given by,n = [1/2π ] √(2k/m)Examples
(i) Vibrations of tuning fork(ii) Vibrations in a stretched string(iii) Oscillations of simple pendulum(iv) Air blown gently across the
mouth of a bottle.
(ii) Damped oscillationsMost of the oscillations in air or in
any medium are damped. When an
oscillation occurs, some kind of
damping force may arise due to
friction or air resistance offered by
the medium. So, a part of the energy
is dissipated in overcoming the
resistive force. Consequently, the
amplitude of oscillation decreases with time and finally becomes zero.
Such oscillations are called damped
oscillations (Fig. 1.13).
Examples :
(i) The oscillations of a pendulum(ii) Electromagnetic damping in
galvanometer (oscillations of a coil in
galvanometer)(iii) Electromagnetic oscillations in
tank circuit
Fig. 14.13 Damped Oscillations
(iii) Maintained oscillations
The amplitude of an oscillating
system can be made constant by
feeding some energy to the system.
If an energy is fed to the system tocompensate the energy it has lost,
the amplitude will be a constant.
Such oscillations are called
378

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 379/422
Physics XI
EEE Consortium
maintained / sustained oscillations
(Fig. 14.14).Example :
A swing to which energy is fedcontinuously to maintain amplitude
of oscillation.
Fig. 14.14 Maintained Oscillations.
(iv) Forced oscillations
When a vibrating body is maintained
in the state of vibration by a periodic
force of frequency (n) other than its
natural frequency of the body, the
vibrations are called forced vibrations. The external force isdriverand body
is driven. The body is forced to
vibrate with an external periodic
force. The amplitude of forced
vibration is determined by the
difference between the frequencies of
the driver and the driven. The larger
the frequency difference, smaller will be the amplitude of the forced
oscillations.Examples :
(i) Sound boards of stringed
instruments execute forced vibration,(ii) Press the stem of vibrating tuning
fork, against tabla. The tabla suffersforced vibration.(v) Resonance
In the case of forced vibration, if the
frequency difference is small, the
amplitude will be large.Ultimately when the two frequencies
are same, amplitude becomes
maximum. This is a special case of
forced vibration. If the frequency of
the external periodic force is equal to
the natural frequency of oscillation of
the system, then the amplitude of
oscillation will be large and this is
known as resonance. Advantages
(i) Using resonance, frequency of a
given tuning fork is determined with
a sonometer.(ii) In radio and television, using tank
circuit, required frequency can be
obtained.
Disadvantages
(i) Resonance can cause disaster in
an earthquake, if the naturalfrequency of the building matches
the frequency of the periodic
oscillations present in the Earth. The
379

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 380/422
Physics XI
EEE Consortium
building begins to oscillate with large
amplitude thus leading to a collapse.(ii) A singer maintaining a note at a
resonant frequency of a glass, cancause it to shatter into pieces.
Example 14.4
At what point during the oscillation
of a spring is the force on the mass
greatest?Solution:
Recall thatF = -kx . Thus the force
on the mass will be greatest when thedisplacement of the block is
maximum, or whenx = ±x m .
Example 14.5
What is the period of oscillation of a
mass of 40 kg on a spring with
constantk = 10 N/m?
Solution:
We have derived thatT =2Π . To
find the period of oscillation we
simply plug into this equation:
T = 2Π = 4Π secondsNo matter what initial conditions are
placed on the system, the period of
oscillation will be same. Notice againthat period, frequency and angular
frequency are properties of the
system, not of the conditions placed
on the system.
Example 14.6
A mass of 2 kg is attached to a spring
with constant 18 N/m. It is thendisplaced to the pointx = 2 . How
much time does it take for the block
to travel to the pointx = 1 ?For this problem we use the sin and
cosine equations we derived for
simple harmonic motion.Recall thatx =x mcos(ωt) . We are givenx andx m in the
question, and must calculateω before
we can findt . We know, however,
that no matter the initial
displacement,
ω = = = = 3 . Thus we can plug in our values:
= cosωt = cos3t
3t= cos-
1
t = = 0.35
seconds
This problem was a simple example
of how to use our equations for
simple harmonic motion.
Example 14.7
380

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 381/422
Physics XI
EEE Consortium
A 4 kg mass attached to a spring is
observed to oscillate with a period of
2 seconds. What is the period of
oscillation if a 6 kg mass is attachedto the spring?Solution:
To find the period of oscillation we
need only knowm andk. We are givenm and must findk for
the spring. If a 4 kg mass oscillates
with a period of 2 seconds, we can
calculatek from the followingequation:
T = 2Π Implying that
k = = = 4Π 2
Now that we havek , calculating the
period for a different mass is easy:
T = 2Π = 2Π = = 2.45
seconds A general statement can be made
from this problem: a larger mass
attached to a given spring will
oscillate with a longer period.
Example 14.8:
A mass of 2 kg oscillating on a spring with constant 4 N/m passes through
its equilibrium point with a velocity
of 8 m/s. What is the energy of the
system at this point? From your
answer derive the maximum
displacement,x m of the mass.Solution:
When the mass is at its equilibriumpoint, no potential energy is stored in
the spring. Thus all of the energy of
the system is kinetic, and can be
calculated easily:
K = mv 2 = (2)(8)2 = 64 JoulesSince this is the total energy of the
system, we can use this answer to
calculate the maximum displacementof the mass. When the block is
maximally displaced, it is at rest and
all of the energy of the system is
stored as potential energy in the
spring, given byU = kx m 2 .Since energy is conserved in the
system, we can relate the answer we
got for the energy at one position with the energy at another:
E f =E o
kx m 2= mv 2 = 64
x m = = = 4
meters
We used energy considerations in
this problem in much the same way
we did when we first encountered
conservation of energy- whether the
motion is linear, circular or
381

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 382/422
Physics XI
EEE Consortium
oscillatory, our conservation laws
remain powerful tools.
Exercise
Multiple Choice Questions
1.A particle executing SHM has
amplitude 0.01 m and frequency60 Hz. The maximum acceleration
of the particle is(i) 144 π2 m/s2
(ii) 120 π2 m/s2
(iii) 80 π2 m/s2
(iv) 60 π2 m/s2
2.A simple pendulum is executing
SHM with a time period T. If thelength of the pendulum is
increased by 21%, the increase in
the time period is(i) 21 %(ii) 10 %(iii) 30 %(iv) 50 %
3.A hollow sphere filled with water
forms the bob of a simplependulum. A small hole at the
bottom of the bob allows the water
to slowly flow out as it is set into
small oscillations and its period of
oscillations is measured. The time
period will(i) Increase
(ii) Decrease(iii) Remain constant(iv) First (i) and then (ii)
4.A simple pendulum hangs from the
ceiling of a car. IF the car
accelerates with uniform
acceleration, the frequency of the
simple pendulum will be(i) Increase
(ii) Decrease(iii) Become infinite(iv) Remains constant
5.The total energy of a body
performing SHM depends on(i) K, a,m
382

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 383/422
Physics XI
EEE Consortium
(ii) K,a, x(iii) K,a(iv) K,x
6.Two springs of constants k1 and k2have equal maximum velocities
when executing SHM. The ratio of
their amplitudes (masses are
equal) will be(i) k1/k2(ii) k2/k1(iii) [k1/k2]1/2
(iv) [k2/k1]1/2
7.Two springs A and B [ka = 3 k b] arestretched by the same force. Then
ratio of work done in stretching is(i) 1 : 2 (iii) 1 : 4(ii) 1 : 3 (iv) 2 : 1
8.A body of mass 5 kg hangs from a
spring and oscillates with a time
period of 2π seconds. If the body
is removed, the length of the
spring will decrease by(i) 2π m (iii) g/k m(ii) g m (iv) k/g m
9.A mass m is suspended from a
spring of negligible mass and the
system oscillates with a frequency
n. What will be the frequency of
oscillation if a mass of 4m is
suspended from the same spring?(i) n/4 (iii) n/2(ii) 2n (iv) 4n
10. If metal bob of a simple
pendulum is replaced by a wooden
bob, then its time period will
(i) Increase(ii) Decrease(iii) Remain the same(iv) First (i) then (ii)
Answers:1.(i) 2. (ii) 3. (iv) 4. (i)5. (iii) 6. (iv) 7. (ii) 8. (ii)9. (iii) 10. (iii)
Questions1.The amplitude of a simple
harmonic oscillator is doubled.
How does this effect (i) the period
(ii) the total energy and (iii) the
maximum velocity of the oscillator?2. A girl is swinging in a swing in
the sitting position. How is the
period of swing affected if she
stands up?3.Show that the time period of SHM
is given by 2π/ω where ω is the
angular frequency of SHM.4.On an average a human heart is
found to beat 75 times in a minute.
Calculate its beat frequency and
period.
5.What will be the time period ofoscillation, if the length of a
second pendulum is one third/6.The bob of a vibrating simple
pendulum is made of ice. How will
383

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 384/422
Physics XI
EEE Consortium
the period of swing will change
when the ice starts melting ?7.The periodic time of a mass
suspended by a spring of forceconstant K is T. If the spring is cut
in three equal parts, what will be
the force constant of each part? If
the same mass be suspended from
one piece, what will be the periodic
time?8.Which of the following functions of
time represent (i) periodic and (ii)non-periodic motion? Give the
period for each motion. (ω is a
positive constant) (i) sin ωt + cosωt
(ii) log ωt (iii) e-ωt
9.A pendulum clock normally shows
correct time. On an extremely cold
day, its length decreases by 0.2%.
Compute the error in time per day.10. A block of mass 1 kg is
fastened to a spring. The spring
has a spring constant 50 N/m.
The block is pulled to a distance y
= 10 cm from its equilibrium
position at y = 0 on a frictionless
surface at t=0. Calculate the
kinetic, potential and total
energies of the block when it is 5
cm away from the mean position.11. The shortest distance travelled
by a particle executing SHM from
mean position in 2 seconds is
equal to (√3/2) times its
amplitude. Determine its time
period.
12. A body is dropped in a holedrilled across a diameter of the
earth. Show that it executes
SHM. Assume the earth to be a
homogenous sphere.
384

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 385/422
Physics XI
EEE Consortium
385

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 386/422
Physics XI
EEE Consortium
386

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 387/422
Physics XI
EEE Consortium
Introduction:
Waves are everywhere. Whether we
recognize it or
not, we encounter
waves on a daily basis.
Sound waves, visible light waves,
radio waves, microwaves, water
waves, sine waves, cosine waves,
stadium waves, earthquake waves,
waves on a string, and slinky waves
and are just a few of the examples of
our daily encounters with waves.In addition to waves, there are a
variety of phenomena in our physical
world that resemble waves so closely
that we can describe such
phenomenon as being wavelike. The motion of a pendulum, the
motion of a mass suspended by a
spring, the motion of a child on a
swing, and the "Hello, Good
Morning!" wave of the hand can be
thought of as wavelike phenomena. Waves (and wavelike phenomena) are
everywhere!
Before beginning a formal discussion
of the nature of waves, it is often
useful to ponder the various
encounters and exposures that we
have of waves. Where do we see waves or examples
of wavelike motion?
387

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 388/422
Physics XI
EEE Consortium
What experiences do we already have
that will help us in understanding
the physics of waves?
For many people, the first thoughtconcerning waves conjures up a
picture of a wave moving across the
surface of an ocean, lake, pond or
other body of water. The waves are created by some form
of a disturbance, such as a rock
thrown into the water, a duck
shaking its tail in the water or a boatmoving through the water. The water wave hasa crest and a
trough and travels from one location
to another. One crest is often followed
by a second crest that is often
followed by a third crest. Every crest
is separated by a trough to create an
alternating pattern of crests and
troughs. A duck or gull at rest on the surface
of the water is observed to bob up-
and-down at rather regular time
intervals as the wave passes by. The
waves may appear to be plane waves
that travel together as a front in a
straight-line direction, perhaps
towards a sandy shore.Or the waves may be circular waves
that originate from the point where
the disturbances occur; such circular
waves travel across the surface of the
water in all directions.
Another picture of waves involves the
movement of a slinky or similar set of
coils. If a slinky is stretched out from
end to end, a wave can be introduced
into the slinky by either vibrating the
first coil up and down vertically or
back and forth horizontally. A wave will subsequently be seen
travelling from one end of the slinky
to the other. As the wave moves along
the slinky, each individual coil is
seen to move out of place and then
return to its original position. The
coils always move in the same
direction that the first coil was
388

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 389/422
Physics XI
EEE Consortium
vibrated. A continued vibration of the
first coil results in a continued back
and forth motion of the other coils.
If looked at closely, one notices thatthe wave does not stop when it
reaches the end of the slinky; rather
it seems to bounce off the end and
head back from where it started. A
slinky wave provides an excellent
mental picture of a wave and will be
used in discussions and
demonstrations throughout this unit.
Waves are everywhere in nature. Our
understanding of the physical world
is not complete until we understand
the nature, properties and
behaviours of waves. The goal of this
unit is to develop mental models of
waves.
In conclusion, a wave can be
described as a disturbance that
travels through a medium,
transporting energy from one location
(its source) to another location
without transporting matter.
Each individual particle of themedium is temporarily displaced and
then returns to its original
equilibrium positioned.
A pulse is a single disturbance
moving through a medium from one
location to another location.
The repeating and periodic
disturbance that moves through a
medium from one location to another
is referred to as a wave. Amedium is a substance or material
that carries the wave. Waves are said to be an energy
transport phenomenon.
Categories of Waves
A transverse wave is a wave in
which particles of the medium move
in a direction perpendicular to the
direction that the wave moves. Transverse waves are always
characterized by particle motion
being perpendicular to wave motion.
A longitudinal wave is a wave in
which particles of the medium move
389

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 390/422
Physics XI
EEE Consortium
in a direction parallel to the direction
that the wave moves.Longitudinal waves are always
characterized by particle motion being parallel to wave motion.
Anelectromagnetic wave is a wave
that is capable of transmitting itsenergy through a vacuum (i.e., empty
space). Electromagnetic waves are
produced by the vibration of charged
particles. Electromagnetic waves that
are produced on the sun
subsequently travel to Earth through
the vacuum of outer space.
Amechanical wave is a wave that is
not capable of transmitting its energy
through a vacuum. Mechanical waves
require a medium in order to
transport their energy from one
location to another. A sound wave is
an example of a mechanical wave.
The Anatomy of a Wave
Atransverse wave is a wave in which
the particles of the medium are
displaced in a direction
perpendicular to the direction of
energy transport.
A transverse wave can be created in arope if the rope is stretched out
horizontally and the end is vibrated
back-and-forth in a vertical direction.
The dashed line drawn through thecenter of the diagram represents the
equilibrium or rest position of the
string. This is the position that the
string would assume if there were no
disturbance moving through it. Thecrest of a wave is the point on
the medium that exhibits the
maximum amount of positive orupward displacement from the rest
position. Points C and J on the
diagram represent the troughs of this
wave.
390

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 391/422
Physics XI
EEE Consortium
Thetrough of a wave is the point on
the medium that exhibits the
maximum amount of negative or
downward displacement from the restposition. The wave shown above can be
described by a variety of properties.
One such property is amplitude. Theamplitude of a wave refers to the
maximum amount of displacement of
a particle on the medium from its
rest position. In a sense, theamplitude is the distance from rest to
crest. Similarly, the amplitude can be
measured from the rest position to
the trough position.In the diagram above, the amplitude
could be measured as the distance of
a line segment that is perpendicular
to the rest position and extends vertically upward from the rest
position to point A.
The energy transported by a wave is
directly proportional to the square of
the amplitude of the wave. This
energy-amplitude relationship is
sometimes expressed in the following
manner.
The wavelength is another property of
a wave that is portrayed in the
diagram above. The wavelength of a wave is simply
the length of one complete wave
cycle. In the diagram above, the
wavelength is the horizontal distance
from A to E, or the horizontal
distance from B to F, or the
horizontal distance from D to G, or
the horizontal distance from E to H.
Any one of these distance
measurements would suffice in
determining the wavelength of this
wave.
A longitudinal wave is a wave in
which the particles of the mediumare displaced in a direction parallel to
the direction of energy transport.
A longitudinal wave can be created in
a slinky if the slinky is stretched out
horizontally and the end coil is
vibrated back-and-forth in a
horizontal direction.
391

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 392/422
Physics XI
EEE Consortium
A region where the coils are pressed
together in a small amount of space
is known as a compression. A compression is a point on a
medium through which a
longitudinal wave is travelling that
has the maximum density. A region
where the coils are spread apart,
thus maximizing the distance
between coils, is known as a
rarefaction. Ararefaction is a point on a medium
through which a longitudinal wave is
travelling that has the minimum
density. Points A, C and E on the
diagram above represent
compressions and points B, D, and F
represent rarefactions. While a transverse wave has an
alternating pattern of crests and
troughs, a longitudinal wave has an
alternating pattern of compressions
and rarefactions.In the case of a longitudinal wave, a
wavelength measurement is made by
measuring the distance from a
compression to the next compression
or from a rarefaction to the next
rarefaction.
On the diagram above, the distancefrom point A to point C or from point
B to point D would be representative
of the wavelength. Thefrequency of a wave refers to
how often the particles of the
medium vibrate when a wave passes
through the
medium.
Unit for
frequency is theHertz (abbreviated
Hz) where 1 Hz is equivalent to 1
cycle/second. Theperiod of a wave is the time for a
particle on a medium to make one
complete Vibrational cycle. Period,
being a time, is measured in units of
time such as seconds.
In equation form,
Since the symbolf is used for
frequency and the symbol T is used
for period, these equations are alsoexpressed as:
Thespeed of an object refers to how
fast an object is moving and is
392

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 393/422
Physics XI
EEE Consortium
usually expressed as the distance
travelled per time of travel. In the
case of a wave, the speed is the
distance travelled by a given point onthe wave (such as a crest) in a given
interval of time. In equation form,
Speed = Wavelength • Frequency
The above equation is known as the
wave equation. It states the
mathematical relationship between
the speed ( v) of a wave and its
wavelength (λ) and frequency (f).
Using the symbols v, λ, andf, the
equation can be rewritten as v = f • λ
Example 15.1
Two waves on identical strings have
frequencies in a ratio of 2 to 1. If
their wave speeds are the same, then
how do their wavelengths compare?
a. 2:1 b. 1:2 c. 4:1 d. 1:4 Answer:BFrequency and wavelength are
inversely proportional to each other.
The wave with the greatest frequency
has the shortest wavelength. Twice
the frequency means one-half the
wavelength. For this reason, the
wavelength ratio is the inverse of thefrequency ratio.
Sine Waves and Periodic Waves
Functions
We can write the wave function for an
arbitrary disturbance as y(x,t) = f(x - vt) with f(x) describing an arbitrary
function.For periodic waves we can use
sin/costo give functionality to the
wave as they are periodic in 2For a periodic wave, the equation of a
plane progressive simple harmonic
wave function is y(x,t ) = Asin 2 /λ( x – vt)
The term 2 scales the wave to thenatural period of the sin function. The term A gives the amplitude of the
wave which is the maximum
displacement of the wave. A more elegant way of writing the
wave function is y (x,t ) = A sin(kx -wt +φ) The phase of the wave is kx - wt + φ.The phase is always measured in
radians.
The term k = 2 /λ is called the
angular wave number.
393

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 394/422
Physics XI
EEE Consortium
The term ω = 2 v/λ = 2 fand is the
angular frequency. The term φis the initial phase of the
wave. The initial phase of a wave
A harmonic wave is generally
described by the wave function y(x,t) = A sin(kx - wt + φ) To what does φ correspond?Let us set x = 0m and t = 0 s. y(0,0) = A sin(φ)So φ gives the displacement of the
wave at x = 0m and t = 0 s.Hence the name- initial phase.φ does not change the sequence of
the events in a wave it only makes
them happen sooner or later in the
sequence.
Phase and Phase Difference
Phase of the wave is given by the
argument of sine or cosine in the
equation of the wave.Φ(x,t) = 2 /λ(vt – x) + Φ0
Φ0represents initial phase.dΦ/dt = 2 v/λ = 2 /TdΦ/dx = -2 /λNegative sign shows phase lag. It
means that when a particle is atlarger distance from the origin, its
phase lag is greater.Phase difference between any two
particles in a wave determines lack of
harmony in the vibrating state of two
particles, ie how for one particle
leads the other or lags behind the
other.
Particle Velocity and Acceleration
Consider the restoring force in SHM.
How is it related to the displacement
of the oscillating particle?
You will notice that the acceleration
and therefore (by Newton's second
law) the resultant force is always in
the opposite direction to the
displacement of the pendulum. This
is the case forall examples of SHM.For the spring we know from Hooke's
Law that...F = -kx
F = ma
So equating the two and rearranging,
equation for the restoringacceleration of a mass-spring
system...a= - (k/m) x
What was the relationship between
displacement and acceleration of an
oscillating system?
Acceleration is negatively
proportional to displacement...a ∞ -xand we can always re-write equations
of this form...
394

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 395/422
Physics XI
EEE Consortium
a = constant (-x)For SHM the constant is ω2
a = - ω2x
This is the generally defining
equation for all SHM.ω is the angular velocity of an object
performing circular motion, and it is
here that we come back to the close
link between circular motion and
SHM.
Acceleration is the second derivative
of position with respect to time, and
thus we can rewrite equation (1) as...a= d2 x/dt2 = -w2 xNow going back to our graphs of the
spring from the previous lesson...
We can see that if we chose to define
the position of the mass-spring
system at a particular time we could
write an equation of the form...
x = x0sin wt
Taking its derivative with respect to
time gives us the velocity …
dx/dt = x0w cos wt
Taking the derivative again with
respect to time gives us
acceleration...
d
2
x/dt
2
= -x0w
2
sin wt And once again we see that a = -w2 x.NB:Depending on the shape of the
graph you start with you could
equally well usex = x0coswtas your
starting equation and adjust the first
and second derivatives appropriately.
Example 15.2
The wave function for a wave is given
by y (x,t ) = 0.02sin(0.4x - 50t +
0.8)m Find (a)
the amplitude, (b) the wavelength, (c)
395

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 396/422
Physics XI
EEE Consortium
the period, (d) the initial phase and
(e) the wave speed.Solution
Compare the given wave function with the algebraic version. y (x,t ) =Asin(kx -wt +φ) y (x,t ) = 0.02sin(0.4x - 50t + 0.8)m y (x,t ) =Asin(kx -wt +φ)(a) Amplitude A = 0.02 m(b) Wave number k = 0.4 rad m-1. As
k = 2 /λ then λ = 5 m(c) Angular frequency w = 50 rad s-1.
As w = 2 f and f = 1/T then T = 2 /ω.Hence T = /25s.
(d) Initial phase φ = 0.8 rad.(e) Wave speed v = ω /k = 50 rad s-1
or 0.4 rad m-1 = 125 m s-1
Characteristics of Wave Motion
• Wave motion is the propagation
of a disturbance produced in a
medium by the repeated periodic
motion of the particles of the
medium.• It is only the energy of the
disturbance that moves forward
without any mass transfer.• In an elastic medium, the
frequency and the amplitude of
oscillation of each particle is the
same. However, each particle starts
vibrating a little later than its
predecessor and thus, there is a
regular phase difference between
the successive particles of themedium.
• The wave velocity is different
from the particle velocity. While the
wave travels with a uniform
velocity, the velocity of the particle
is different at different positions. It
is maximum at the mean position
and zero at the extreme positionsof oscillation.
• Waves may undergo reflection,
refraction, interference, dispersion
and diffraction.• The energy of a wave is partly
kinetic and partly potential and the
total energy remains constant.
Frequency and Pitch
The human ear is capable of
detecting sound waves with a wide
range of frequencies, ranging between
approximately 20 Hz to 20 000 Hz.
Any sound with a frequency below
the audible range of hearing (i.e., less
than 20 Hz) is known as an
infrasound and any sound with a
frequency above the audible range of
hearing (i.e., more than 20 000 Hz) is
known as anultrasound.
396

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 397/422
Physics XI
EEE Consortium
The sensation of a frequency is
commonly referred to as thepitch of
a sound. A high pitch sound
corresponds to a high frequencysound wave and a low pitch sound
corresponds to a low frequency
sound wave.
Speed of a transverse waves on a
stretched string Assume that the velocity of the wave
v depends upon,(a) the tension in the string (T),
(b) the mass of the string (M) and
(c) the length of the string (L)
Therefore: v = kT xM yLz
Solving this gives x = ½, z = ½, y = -½
The constant k can be shown to be
equal to 1 in this case and we write
m as the mass per unit length where
m = M/L. The formula therefore becomes:
Velocity of waves on a stretchedstring = [T/m]1/2
Velocity = √ /ρ = modulus of rigidity and ρ is
density of material of solid.Since velocity = frequency x
wavelengthFrequency of a vibrating string
n = [T/m]1/2 / λ
Speed of longitudinal waves
Velocity of Sound in Gases (Newton's
Formula)
We know that the properties of a
medium that govern the propagation
of a mechanical wave are:
• a restoring force• an inertial mass
The restoring force acting on the
particles of the medium is intimately
connected to the approximate elastic
397

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 398/422
Physics XI
EEE Consortium
modulus of the medium and the
inertial mass, to its density.In 1676, Newton derived an
expression for the velocity of sound ina homogenous medium. He showed
that
where v is the velocity of sound, E is
the modulus of elasticity and r is the
density of the medium. When the
medium is a gas only the bulk
modulus is to be considered.
Where B is the bulk modulus of
elasticity. Newton assumed that the
temperature remains constant when
sound travels through a gas (air).
Therefore the process is isothermaland Boyle's law can be applied. At a
region of compression, the pressure
increases and volume decreases.Let the initial pressure = PInitial volume = VIncrease in pressure = PDecrease in volume = V Then, final pressure = P + PFinal volume = V - V Applying Boyle's law, (P + P) (V - V)
= PVExpanding the terms, PV - P V + V
P - P.V = PV
Since the changes in pressure and
volume are small, P. V can be
neglected. Then,
Comparing equations 3 and 4 We get B = P Therefore, Newton's formula for
velocity of sound can be written as
At NTP., with pressure of air = P =0.76 x 9.8 x 13.6 x 103
= 1.013 x 105 Pa or Nm-2
Laplace's Correction to Newton's
Formula
Assuming isothermal conditions to
prevail when sound travels through
air, Newton has applied Boyle's law to
the changes in pressure and volume.
In a region of compression, there is a
398

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 399/422
Physics XI
EEE Consortium
slight increase in temperature and in
a region of rarefaction, there is a
slight decrease in temperature. These
changes in pressure occur rapidlyand air is a poor conductor of heat
thus, equalization of temperature
among the different regions was
improbable, according to Laplace.. He
was of the view that the changes in
temperature occur under adiabatic
conditions, i.e., no heat enters the
gas from outside or leaves it frominside. The heat developed in the
compressed layers remains fully
confined to those layers and has no
time to get dissipated into the entire
body of the gas. Similarly, the cold
caused in the rarefied layers cannot
be compensated for, by flow of heat
into it from other layers. Thus Boyle's law does not apply in
this case. The relation between pressure and
volume of a gas under adiabatic
conditions is given by
where i.e., the ratio of the
principle specific heats of the gas at
constant pressure and constant
volume respectively.
Let the pressure change by an
amount DP, producing a change in
volume by DV. Then
Taking out from the 2nd factor in
the above expression,
But from binomial approximation,
Cancelling P on both sides and
neglecting the term containing P.
V because it is too small, we get
But the LHS in the above equation
represents the bulk modulus, B.
Substituting in equation (1-23), we
get
399

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 400/422
Physics XI
EEE Consortium
This is known as Newton-Laplace
formula for the velocity of sound in a
gas.
This is in close agreement with the
experimental value.
Factors affecting velocity of soundEffect of temperature
If we supply heat to a gas, or raise
temperature, there are two
possibilities:
1) If the gas is free to expand, then
on being heated its volume will
increase while pressure will remain
constant. i.e, its density woulddecrease and pressure will remain
constant.
i.e, the value of ratio P/d will
increase.
2) If the gas is closed in a container,
then on being heated its pressure will
increase while the density will not
change. i.e, again the value of P/d will increase.
Thus in both situations,the speed
of sound will increase with
increase in temperature.
Effect of density
If we are considering a single gas
system, then the density is aconstant. Otherwise, velocity is
inversely proportional to square root
of density.
The velocity of sound in hydrogen is
greater than that in oxygen because
hydrogen is a lighter gas.
Effect of wind
The velocity of sound is also affected
by the wind velocity. Suppose S is a
source of sound, O is an observer.
The sound travels along SO with
velocity v. If wind blows with velocity
u in the direction SQ making an
angle θ with SO, then component of
wind velocity along SO is u cosθ. This
component is added to velocity of
sound, and sound travels in the
direction SO with a velocity,
V = v + u cosθ
Thus, sound will travel faster, if θ is
acute and slower, if θ is obtuse.The
400

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 401/422
Physics XI
EEE Consortium
wind will have no effect on velocity on
velocity of sound, if θ = 90.
Effect of Frequency There is no effect of frequency on the
speed of sound.Sound waves of
different frequencies travel with same
speed in air although their
wavelengths in air are different. In
case, the speed of sound through air
depended on frequency, then we
could not have enjoyed orchestra.
Effect of amplitude
If amplitude of sound waves is very
large, the compressions and
rarefactions may result in large
temperature variations and this may
affect the velocity of sound.
Reflection of Waves
Boundary Behavior
The behaviour of a wave (or pulse)
upon reaching the end of a medium
is referred to as boundary behaviour. When one medium ends,
another medium begins; the interface
of the two media is referred to as the
boundary and the behaviour of a
wave at that boundary is described
as its boundary behaviour.
Fixed End Reflection
First consider an elastic rope
stretched from end to end. One end
will be securely attached to a pole on
a lab bench while the other end will
be held in the hand in order to
introduce pulses into the medium.
Because the right end of the rope isattached to a pole (which is attached
to a lab bench) (which is attached to
the floor that is attached to the
building that is attached to the
Earth), the last particle of the rope401

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 402/422
Physics XI
EEE Consortium
will be unable to move when a
disturbance reaches it. This end of
the rope
is
referred to as afixed end.
If a pulse is introduced at the left end
of the rope, it will travel through the
rope towards the right end of the
medium. This pulse is called the
incident pulse since it is incident
towards (i.e., approaching) the
boundary with the pole. When the
incident pulse reaches the boundary,
two things occur:
• A portion of the energy carried
by the pulse is reflected and returns
towards the left end of the rope. The
disturbance that returns to the left
after bouncing off the pole is known
as thereflected pulse.• A portion of the energy carried
by the pulse istransmitted to the
pole, causing the pole to vibrate.
Because the vibrations of the pole are
not visibly obvious, the energy
transmitted to it is not typically
discussed. The focus of thediscussion will be on the reflected
pulse. What characteristics and
properties could describe its motion? When one observes the reflected
pulse off the fixed end, there are
several notable observations. First
the reflected pulse isinverted.
That is, if an upward displaced pulseis incident towards a fixed end
boundary, it will reflect and return as
a downward displaced pulse.Similarly, if a downward displaced
pulse is incident towards a fixed end
boundary, it will reflect and return as
an upward displaced pulse.
The inversion of the reflected pulse
can be explained by returning to our
conceptions of the nature of amechanical wave. When a crest reaches the end of a
medium ("medium A"), the last
particle of the medium A receives an
402

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 403/422
Physics XI
EEE Consortium
upward displacement. This particle is
attached to the first particle of the
other medium ("medium B") on the
other side of the boundary. As the last particle of medium A pulls
upwards on the first particle of
medium B, the first particle of
medium B pulls downwards on the
last particle of medium A. This is merelyNewton's third law of
action-reaction. For every action,
there is an equal and oppositereaction. The upward pull on the first
particle of medium B has little effect
upon this particle due to the large
mass of the pole and the lab bench to
which it is attached. The effect of the downward pull on
the last particle of medium A (a pull
that is in turn transmitted to the
other particles) results in causing the
upward displacement to become a
downward displacement. The upward displaced incident pulse
thus returns as a downward
displaced reflected pulse. It is
important to note that it is the
heaviness of the pole and the lab
bench relative to the rope that causes
the rope to become inverted upon
interacting with the wall. When two media interact by exerting
pushes and pulls upon each other,
the most massive medium wins the
interaction. Just like in arm wrestling,
the medium that loses receives a
change in its state of motion.Other notable characteristics of the
reflected pulse include:
• The speed of the reflected pulse
is the same as the speed of the
incident pulse.• The wavelength of the reflected
pulse
is the
same
as the
wavelength of the incident pulse.• The amplitude of the reflected
pulse is less than the amplitude
of the incident pulse.
Of course, it is not surprising that
the speed of the incident and
reflected pulse are identical since the
two pulses are travelling in the same
medium. Since the speed of a wave
(or pulse) is dependent upon the
medium through which it travels,two pulses in the same medium will
have the same speed. A similar line of
reasoning explains why the incident
403

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 404/422
Physics XI
EEE Consortium
and reflected pulses have the same
wavelength.Every particle within the rope will
have the same frequency. Beingconnected to one another, they must
vibrate at the same frequency.Since the wavelength of a wave
depends upon the frequency and the
speed, two waves having the same
frequency and the same speed must
also have the same wavelength.Finally, the amplitude of the reflected
pulse is less than the amplitude of
the incident pulse since some of the
energy of the pulse was transmitted
into the pole at the boundary. The reflected pulse is carrying less
energy away from the boundary
compared to the energy that the
incident pulse carried towards the
boundary.Since the amplitude of a pulse is
indicative of the energy carried by the
pulse, the reflected pulse has a
smaller amplitude than the incident
pulse.
Free End Reflection
Now consider what would happen if
the end of the rope were free to move.
Instead of being securely attached toa lab pole, suppose it is attached to a
ring that is loosely fit around the
pole.Because the right end of the rope is
no longer secured to the pole, the last
particle of the rope will be able to
move when a disturbance reaches it. This end of the rope is referred to as
afree end.Once more if a pulse is introduced at
the left end of the rope, it will travel
through the rope towards the right
end of the medium. When the incident pulse reaches the
end of the medium, the last particle
of the rope can no longer interact
with the first particle of the pole.
Since the rope and pole are no longer
attached and interconnected, they
will slide past each other.So when a crest reaches the end of
the rope, the last particle of the rope
receives the same upward
displacement; only now there is no
adjoining particle to pull downwardupon the last particle of the rope to
cause it to be inverted. The result is that the reflected pulse
is not inverted. When an upward
404

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 405/422
Physics XI
EEE Consortium
displaced pulse is incident upon a
free end, it returns as an upward
displaced pulse after reflection.
And when a downward displacedpulse is incident upon a free end, it
returns as a downward displaced
pulse after reflection. Inversion is not
observed in free end reflection.
Transmission of a Pulse across a
Boundary from Less to More Dense
Let's consider a thin rope attached to
a thick rope, with each rope held at
opposite ends by people. Andsuppose that a pulse is introduced by
the person holding the end of the
thin rope.If this is the case, there will be an
incident pulse travelling in the less
dense medium (the thin rope)
towards the boundary with a more
dense medium (the thick rope).
Upon reaching the boundary, the
usual two behaviors will occur.
•
A portion of the energy carried by the incident pulse is reflected and
returns towards the left end of the
thin rope. The disturbance that
returns to the left after bouncing off
the boundary is known as the
reflected pulse.• A portion of the energy carried
by the incident pulse is transmittedinto the thick rope. The disturbance
that continues moving to the right is
known as thetransmitted pulse.
The reflected pulse will be found to
be inverted in situations such as
this. During the interaction between
the two media at the boundary, the
first particle of the more dense
medium overpowers the smaller mass
of the last particle of the less dense
medium. This causes an upward displaced
pulse to become a downward
displaced pulse. The more dense
medium on the other hand was atrest prior to the interaction. The first
particle of this medium receives an
upward pull when the incident pulse
reaches the boundary. Since the
405

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 406/422
Physics XI
EEE Consortium
more dense medium was originally at
rest, an upward pull can do nothing
but cause an upward displacement.
For this reason, the transmittedpulse is not inverted. In fact,
transmitted pulses can never be
inverted. Since the particles in this
medium are originally at rest, any
change in their state of motion would
be in the same direction as the
displacement of the particles of the
incident pulse. TheBefore and After snapshots of the
two media are shown in the diagram
below.
Comparisons can also be made
between the characteristics of thetransmitted pulse and those of the
reflected pulse. Once more there are
several noteworthy characteristics.
• The transmitted pulse (in the
denser medium) is travelling
slower than the reflected pulse (in
the less dense medium).• The transmitted pulse (in the
denser medium) has a smaller
wavelength than the reflected
pulse (in the less dense medium).• The speed and the wavelength
of the reflected pulse are the same
as the speed and the wavelength
of the incident pulse.
The speed of a wave is dependent
upon the properties of the medium.
In this case, the transmitted and
reflected pulses are travelling in two
distinctly different media. Waves always travel fastest in the
least dense medium. Thus, the
reflected pulse will be travelling faster
than the transmitted pulse. Second,
particles in the denser medium will
be vibrating with the same frequency
as particles in the less dense
medium.Since the transmitted pulse was
introduced into the denser medium
by the vibrations of particles in theless dense medium, they must be
vibrating at the same frequency. So
the reflected and transmitted pulses
406

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 407/422
Physics XI
EEE Consortium
have the different speeds but the
same frequency.Since the wavelength of a wave
depends upon the frequency and thespeed, the wave with the greatest
speed must also have the greatest
wavelength.Finally, the incident and the reflected
pulse share the same medium. Since
the two pulses are in the same
medium, they will have the same
speed.Since the reflected pulse was created
by the vibrations of the incident
pulse, they will have the same
frequency. And two waves with the same speed
and the same frequency must also
have the same wavelength.
Transmission of a Pulse across a
Boundary from More to Less Dense
Finally, let's consider a thick rope
attached to a thin rope, with the
incident pulse originating in the
thick rope.If this is the case, there will be an
incident pulse travelling in thedenser medium (thick rope) towards
the boundary with a less dense
medium (thin rope).
Once again there will be partial
reflection and partial transmission at
the boundary.
The reflected pulse in this situation
will not be inverted. Similarly, the
transmitted pulse is not inverted (as
is always the case).Since the incident pulse is in a
heavier medium, when it reaches the
boundary, the first particle of the less
dense medium does not have
sufficient mass to overpower the last
particle of the denser medium.
The result is that an upward
displaced pulse incident towards the
boundary will reflect as an upward
displaced pulse.For the same reasons, a downward
displaced pulse incident towards the boundary will reflect as a downward
displaced pulse. TheBefore and After snapshots of the
two media are shown in the diagram
below.
407

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 408/422
Physics XI
EEE Consortium
Comparisons between thecharacteristics of the transmitted
pulse and the reflected pulse lead to
the following observations.
• The transmitted pulse (in the
less dense medium) is traveling
faster than the reflected pulse (in
the more dense medium).• The transmitted pulse (in the
less dense medium) has a larger
wavelength than the reflected
pulse (in the more dense
medium).• The speed and the wavelength
of the reflected pulse are the
same as the speed and the
wavelength of the incident pulse.
The boundary behavior of waves
in ropes can be summarized by
the following principles:
• The wave speed is always
greatest in the least dense rope.• The wavelength is always
greatest in the least dense rope.• The frequency of a wave is not
altered by crossing a boundary.• The reflected pulse becomes
inverted when a wave in a less
dense rope is heading towards a
boundary with a more dense
rope.• The amplitude of the incident
pulse is always greater than the
amplitude of the reflected pulse.
The Principle of Superposition
The task of determining the shape of
the resultant demands that the
principle of superposition is applied. Theprinciple of superposition is
sometimes stated as follows:
When two waves interfere, the
resulting displacement of the
medium at any location is thealgebraic sum of the
displacements of the individual
waves at that same location.
408

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 409/422
Physics XI
EEE Consortium
Analytical Treatment
Consider two waves which are out of
phase by a constant angle φ, then
Y1 = rsin(ωt –kx) Y2 = rsin(ωt –kx+φ) According to superposition principle: y = y1 + y2(Simplified using trigonometric
relation sinA + sin B = 2cos(A-
B)/2sin(A+B)/2)
y = 2rcosφ/2 sin(ωt –kx + φ/2)
Amplitude = 2rcosφ/2
Wave interference is the
phenomenon that occurs when two
waves meet while travelling along the
same medium.
if two upward displaced pulses
having the same shape meet up withone another while travelling in
opposite directions along a medium,
the medium will take on the shape of
an upward displaced pulse with twice
the amplitude of the two interfering
pulses. This type of interference is
known as constructive
interference.If an upward displaced pulse and a
downward displaced pulse having the
same shape meet up with one
another while travelling in opposite
directions along a medium, the two
pulses will cancel each other's effect
upon the displacement of the
medium and the medium will assumethe equilibrium position. This type of
interference is known asdestructive
interference. The diagrams below show two waves -
one is blue and the other is red -
interfering in such a way to produce
a resultant shape in a medium; the
resultant is shown in green.In two cases (on the left and in the
middle), constructive interference
occurs and in the third case (on the
far right, destructive interference
occurs.
Traveling Waves vs. Standing Waves
A mechanical wave is a disturbance
that is created by a vibrating object
and subsequently travels through a
medium from one location to another,
transporting energy as it moves. The mechanism by which a
mechanical wave propagates itself
409

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 410/422
Physics XI
EEE Consortium
through a medium involves particle
interaction;
one particle applies a push or pull on
its adjacent neighbour, causing a
displacement of that neighbour fromthe equilibrium or rest position. As a wave is observed travelling
through a medium, a crest is seen
moving along from particle to
particle. This crest is followed by a
trough that is in turn followed by the
next crest.In fact, one would observe a distinct
wave pattern (in the form of a sine
wave) travelling through the medium.
This sine wave pattern continues to
move in uninterrupted fashion until
it encountersanother wave along
the medium or until it encountersa
boundary with another medium. This type of wave pattern that is seen
travelling through a medium is
sometimes referred to as atravelling
wave. Travelling waves are observed when a
wave is not confined to a given space
along the medium. The most
commonly observed travelling wave is
an ocean wave.
What is a Standing Wave Pattern?
It is however possible to have a wave
confined to a given space in amedium and still produce a regular
wave pattern that is readily
discernible amidst the motion of the
medium.For instance, if an elastic rope is held
end-to-end and vibrated at just the
right frequency, a wave pattern would
be produced that assumes the shapeof a sine wave and is seen to change
over time. The wave pattern is only
produced when one end of the rope is
vibrated at just the right frequency.
410

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 411/422
Physics XI
EEE Consortium
When the proper frequency is used,
the interference of the incident wave
and the reflected wave occur in such
a manner that there are specificpoints along the medium that appear
to be standing still. Because the
observed wave pattern is
characterized by points that appear
to be standing still, the pattern is
often called a standing wave
pattern.
There are other points along themedium whose displacement changes
over time, but in a regular manner.
These points vibrate back and forth
from a positive displacement to a
negative displacement; the vibrations
occur at regular time intervals such
that the motion of the medium is
regular and repeating. A pattern isreadily observable.
Note that point A on the medium
moves from a maximum positive to a
maximum negative displacement over
time. The diagram only shows one-
half cycle of the motion of thestanding wave pattern. The motion would continue and
persist, with point A returning to the
same maximum positive
displacement and then continuing its
back-and-forth vibration between the
up to the down position.Note that point B on the medium is a
point that never moves. Point B is apoint of no displacement. Such
points are known asnodes and will
be discussed in more detaillater in
this lesson. The standing wave pattern that is
shown at the right is just one of
many different patterns that could be
produced within the rope. Otherpatterns will be discussedlater in the
lesson.
How is a Standing Wave Formed?
Let’s consider a snakey stretched
across the room, approximately 4-
meters from end to end. (A "snakey"is a slinky-like device that consists of
a large concentration of small-
diameter metal coils.)If an upward displaced pulse is
introduced at the left end of the
snakey, it will travel rightward across
the snakey until it reaches the fixed
end on the right side of the snakey.Upon reaching the fixed end, the
single pulse will reflect and undergo
inversion. That is, the upward
displaced pulse will become a
411

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 412/422
Physics XI
EEE Consortium
downward displaced pulse. Now
suppose that a second upward
displaced pulse is introduced into the
snakey at the precise moment thatthe first crest undergoes itsfixed end
reflection.If this is done with perfect timing, a
rightward moving, upward displaced
pulse will meet up with a leftward
moving, downward displaced pulse in
the exact middle of the snakey.
As the two pulses pass through eachother, they will undergodestructive
interference. Thus, a point of no
displacement in the exact middle of
the snakey will be produced.
A standing wave pattern is an
interference phenomenon. It is
formed as the result of the perfectly
timed interference of two waves
passing through the same medium. A standing wave pattern is not
actually a wave; rather it is the
pattern resulting from the presence
of two waves (sometimes more) of the
same frequency with different
directions of travel within the same
medium. The physics of musical instruments
has a basis in the conceptual and
mathematical aspects of standing
waves.
What are Nodes and Antinodes?
One characteristic of every standing
wave pattern is that there are pointsalong the medium that appear to be
standing still. These points,
sometimes described as points of no
displacement, are referred to as
nodes. There are other points along
the medium that undergo vibrations
between a large positive and large
negative displacement. These are the points that undergo
the maximum displacement during
each Vibrational cycle of the standing
wave. In a sense, these points are the
opposite of nodes, and so they are
calledantinodes. A standing wave pattern always
consists of an alternating pattern ofnodes and antinodes.
412

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 413/422
Physics XI
EEE Consortium
Harmonics
Standing wave patterns can only beproduced within the medium when it
is vibrated at certain frequencies.
There are several frequencies with
which the snakey can be vibrated to
produce the patterns.Each frequency is associated with a
different standing wave pattern.
These frequencies and their
associated wave patterns are referred
to asharmonics. The simplest standing wave pattern
that could be produced within a
snakey is one that has points of no
displacement (nodes) at the two ends
of the snakey and one point of
maximum displacement (antinode) in
the middle.First Harmonic Standing Wave Pattern
The above standing wave pattern is
known as thefirst harmonic. It isthe simplest wave pattern produced
within the snakey. The standing wave pattern
characterized by nodes on the two
ends of the snakey and an additional
node in the exact center of the
snakey is shown in the figure. As in all standing wave patterns,
every node is separated by anantinode. This pattern with three
nodes and two antinodes is referred
to as thesecond harmonic.
Second Harmonic Standing Wave
Pattern
The standing wave pattern for the
third harmonic has an additional
node and anti-node between the ends
of the snakey. The pattern is depicted
in the figure shown below.
Third Harmonic Standing Wave
Pattern
Analyzing the First Harmonic
Pattern
One complete wave in a standing
wave pattern consists of twoloops.
413

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 414/422
Physics XI
EEE Consortium
Thus, one loop is equivalent to one-
half of a wavelength.
In comparing the standing wave
pattern for the first harmonic with its
single loop to the diagram of a
complete wave, it is evident that there
is only one-half of a wave stretching
across the length of the string. That is, the length of the string is
equal to one-half the length of a
wave. Put in the form of an equation:
Frequency (f1) = 1/2L[T/m]1/2
Analyzing the Second Harmonic
Pattern
Now consider the string being vibrated with a frequency that
establishes the standing wave pattern
for the second harmonic.
The second harmonic pattern
consists of two anti-nodes. Thus,
there are two loops within the lengthof the string.Since each loop is equivalent to one-
half a wavelength, the length of the
string is equal to two-halves of a
wavelength.
Put in the form of an equation:
Frequency (f2) = 1/L[T/m]1/2
F2 = 2f1
Analyzing the Third Harmonic
Pattern
The same reasoning pattern can be
applied to the case of the string being
vibrated with a frequency that
establishes the standing wave pattern
for the third harmonic.
The third harmonic pattern consists
of three anti-nodes. Thus, there are
three loops within the length of the
string.Since each loop is equivalent to one-
half a wavelength, the length of the
string is equal to three-halves of a wavelength. Put in the form of an
equation:
Frequency (f3) = 3/2L [T/m]1/2
414

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 415/422
Physics XI
EEE Consortium
f3 = 3f1
When inspecting the standing wave
patterns and the length-wavelength
relationships for the first three
harmonics, a clear pattern emerges.
The number of antinodes in the
pattern is equal to the harmonic
number of that pattern. The first harmonic has one antinode;
the second harmonic has two
antinodes; and the third harmonic
has three antinodes. Thus, it can be generalized that the
nth harmonic hasn antinodes where
n is an integer representing the
harmonic number.Furthermore, one notices that there
are n halves wavelengths present within the length of the string. Put in
the form of an equation:
Frequency fn = n f1
Closed Organ Pipe
The organ pipe in which one end is
opened and another end is closed is
called organ pipe. Bottle, whistle, etc.
are examples of closed organ pipe. The different mode of the vibration in
the closed organ pipe is discussed as below.
A. First Mode Of Vibration
In the first mode of vibration in the
closed organ pipe, an antinode is
formed at the open end and a node is
formed at the close end. If ‘l’ be the
length of pipe and be the
wavelength of wave emitted in this
mode of vibration. Then,
415

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 416/422
Physics XI
EEE Consortium
if ‘v’ be the velocity of sound and to
be the frequency of wave in this mode
of vibration.
This is fundamental frequency of 1st
harmonics
B. Second Mode Of Vibration:
In this mode of vibration two
antinodes and two nodes are formed
as in fig. If ‘λ’ be the length of pipeand be the wavelength of wave
emitted in this mode of vibration.
Then,
if v be the velocity of wave and f1 be
the frequency of wave, in this mode of
vibration
This is the frequency of 1st overtone
of third harmonics.
C. Third Mode Of Vibration:
In this mode of vibration three
antinodes and three nodes are
formed as in fig. If ‘l’ be the length of
the pipe and be the wavelength of
wave admitted in this mode of
vibration. Then,
If v be the velocity of wave and f2 be
the frequency of wave. If this mode of vibration,f2 = 5f0 This is the frequency of 2nd overtone
& firth harmonics.In this way, for the 4th, 5th…. modes
of vibration the frequency of wave
emitted are 7f0, 9f0……. which are
called 7th , 9th …… harmonics i.e.in
the closed organ pipe only odd
harmonic are present.
Open Organ Pipes
The pipe in which the both of its ends
are open is called open organ pipe.
Flute is the example of organ pipe.
Different modes of vibration in
open pipe
416

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 417/422
Physics XI
EEE Consortium
A. First Mode Of Vibration:
In the mode of vibration in the organ
pipe, two antinodes are formed at twoopen ends and one node is formed in
between them. If length of the pipe be
‘l’ and be the wavelength of wave
emitted in this mode of vibration.
Then,
if ‘v’ be the velocity of sound and to be the frequency of wave in this mode
of vibration. Then,
This is the fundamental frequency of
1st overtone or 2 harmonious.
B. Second Mode Of Vibration: In the second mode of vibration in
the open organ pipe, there antinodes
are formed at two ends and two
nodes between them. If ‘l’ be the length of the pipe and λ1 be the wavelength of wave emitted in
this mode of vibration. Then,
If v be the velocity of sound and to
be the frequency of wave in this mode
of vibration, then,
This is the fundamental frequency of2nd overtone or harmonics.
C. Third Mode Of Vibration:
In the third mode of vibration in the
open organ pipe, four antinodes areformed and three nodes between
them. If ‘l’ be the length of the pipe
and λ2 be the wavelength of wave
417

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 418/422
Physics XI
EEE Consortium
emitted in this mode of vibration
then
if v be the velocity of sound and f2 be
the frequency of wavelength on this
mode of vibration, then,
This is the fundamental of 2nd
overtone & 3rd harmonics. In this way, for the 4th, 5th
…………….. modes of vibration, the
frequency of wave are f3= 4f0; f4=
5f0…………….are the frequency of 4th,
5th harmonics.
Hence in open organ pipe odd and
even both harmonic are present.
Then the sound heard by open organ
is so sonorous.
Beats
Beats are caused by the interference
of two waves at the same point in
space. The phenomenon of alternate
variation in the intensity of sound
with time a a particular position,
when two sound waves of nearly
same frequencies and amplitudessuperimpose on each other is called
beats. The time interval between two
successive beats is called beat
period. The number of beats
produced per second is called the
beat frequency.
For the formation of beats,
frequencies of two sources of sound
should be nearly equal ie difference
in frequencies of two sources must be
small, say less than 10. This plot of the variation of resultant
amplitude with time shows the
periodic increase and decrease for
two sine waves.
418

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 419/422
Physics XI
EEE Consortium
Analytical treatment
Two waves of equal amplitude are
travelling in the same direction. The
two waves have different frequencies
and wavelengths, but they both travel with the same wave speed.Using the principle of superposition,
the resulting particle displacement
may be written as:
y(x,t)=ym sin(k1 x - ω1t) + ymsin(k2 x +
ω2t)= 2 ymcos[( k1 - k2)2x - (ω1 -ω2)2t] x
sin [(k1 + k2)2x - (ω1 +ω2)2t]
This resulting particle motion is the
product oftwo travelling waves.One part is a sine wave which
oscillates with the average frequency
f = ½( f1 + f2). This is the frequency which is perceived by a listener. The other part is a cosine wave which
oscillates with the difference
frequency f = ½( f1 - f2).
This term controls the amplitude
"envelope" of the wave and causes the
perception of "beats".
The beat frequency is actually twicethe difference frequency, f beat = ( f1 - f2).In the figure given below, at left two
waves with slightly different
frequencies are travelling to the right.
Since the two waves are travelling in
the same medium, they travel with
the same speed. The resulting superposition sum
wave travels in the same direction
and with the same speed as the two
component waves, but its local
amplitude depends on whether the
two individual waves have the same
or opposite phase. The "beat" wave oscillates with the
average frequency, and its amplitude
envelope varies according to the
difference in frequency.
Applications of Beats
RADAR speed detectors bounce
microwave radiation off of moving
vehicles and detect the reflected waves. These waves are shifted in
frequency by theDoppler effect, and
the beat frequency between the
419

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 420/422
Physics XI
EEE Consortium
directed and reflected waves provides
a measure of the vehicle speed.
Doppler Effect
The Doppler Effect is observed
whenever the source of waves is
moving with respect to an observer.
TheDoppler Effectcan be described
as the effect produced by a moving
source of waves in which there is an
apparent upward shift in frequency
for observers towards whom the
source is approaching and an
apparent downward shift in
frequency for observers from whom
the source is receding. It is important
to note that the effect does not result
because of an actual change in the
frequency of the source. You recall an instance in which a
police car or emergency vehicle was
travelling towards you on the
highway. As the car approached with
its siren blasting, the pitch of the
siren sound (a measure of the siren's
frequency) was high; and then
suddenly after the car passed by, the
pitch of the siren sound was low.
That was the Doppler effect - an
apparent shift in frequency for a
sound wave produced by a moving
source.
The Apparent change in the
frequency of sound when the source,the observer and the medium are in
a relative motion is calledDoppler
Effect. For the waves which require a
medium for their propagation, the
apparent frequency depends on three
factors :1. Velocity of the source2. Velocity of the observer3. Velocity of the medium or wind.
Doppler Shift Formula
Doppler Shift was given by Christian
Johann Doppler in 1842. This
apparent change in the frequency of
sound as a result of relative motion
between the source and the observer
is the Doppler Effect.
420

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 421/422
Physics XI
EEE Consortium
Expression for apparent frequency
Let S be a source of sound and L, the
listener of sound. Both are initially at
rest. Let f be the actual frequency of
sound emitted by the source and λ bethe actual wavelength of the sound
emitted.
λ = v/fLet the distance between the source
and listener be v, so that ν waves
from the source reach the listener in
one second. Therefore, frequency of
sound heard by the listener is also f.Let us consider a situation, in which
the medium, source and listener
move in the same direction from S to
L with velocities vm, vs and vLrespectively. As a result of the motion of the
medium, the sound waves in one
second, travel a distance
= (v +vm). This is the resultant velocity of sound along SL.Further, the distance moved by the
source in one second = SS’ = vs, along
SL.
Relative velocity of sound with
respect to the source = [(v +vm) – vs].
This is the distance covered by the
sound waves in one second, relativeto the source. As the frequency of sound waves
remains unchanged by the motion of
the source or the medium, therefore,
v waves emitted in one second occupy
the distance [(v +vm) – vs]. Therefore,
the apparent wavelength λ’ of the
sound waves would become λ’ = [(v +vm) – vs]/ f These waves of wavelength λ’ travel
towards the listener, who himself
moves through a distance LL’ = vL in
one second.Relative velocity of sound waves with
respect to listener = (v +vm) – vL
This is the distance available in onesecond to waves of wavelength λ’. Apparent frequency of sound waves
heard by the listener isf’ =[ (v + vm) – vL]/λ’Substituting for λ’ = [(v +vm) – vs]/ f f’ = [(ν + νm) – νL] f [(ν + νm) – νs]
All velocities along the direction S toL are taken as positive and all
velocities along the direction L to S
are taken as negative.
421

7/24/2019 j. Physics XI Text Matter Modified
http://slidepdf.com/reader/full/j-physics-xi-text-matter-modified 422/422
Physics XI
EEE Consortium
In case the medium is moving in the
opposite direction (from listener to
source), vm is negative. Now the
effective velocity of sound waves = (v –vm). Hence, observed frequency f’ is
given byf’ = [(ν - νm) – νL]/f
[(ν - νm) – νs]Special cases
There are eight Doppler Effect
Formulas for frequency depending on
cases:(i) When the source is moving
towards a observer at rest
(ii) When the source is moving away
from the observer at rest
(iii) When observer is moving towards
the stationary source
(iv) When observer moving away from
a stationary source
(vii) When the Source is approaching
the Stationary observer and observer
moving away from observer
(viii) When the Observer is
approaching the Stationary source
Where vs = velocity of the Source,
vo = velocity of the Observer, v = velocity of sound in
medium,
f = Real frequency,
f' = Apparent frequency.
Doppler effect formula is used to find
the apparent frequency and
wavelength for the source moving
towards the observer and away fromthe observer or observer moving
towards the source or away from the
source.Numerical