ITS for Crowds
24
1 Remember this?
-
Upload
serge-hoogendoorn -
Category
Science
-
view
229 -
download
0
Transcript of ITS for Crowds

1
Remember this?

2
Break-down of efficient self- organisation • When conditions become too crowded
(density larger than critical density), efficient self-organisation ‘breaks down’
• Flow performance (effective capacity) decreases substantially, potentially causing more problems as demand stays at same level
• Importance of ‘keeping things flowing’, i.e. keeping density at subcritical level maintaining efficient and smooth flow operations
• Has severe implications on the network level

Why crowd management is necessary!
• Pedestrian Network Fundamental Diagram shows relation between number of pedestrians in area
• P-NFD shows reduced performance of network flow operations in case of overloading causes by various phenomena such as faster-is-slower effect and self-organisation breaking down
• Current work focusses on theory P-NFD, hysteresis, and impact of spatial variation (forthcoming ISTTT paper) Q
network
(⇢,�) = Qlocal
(⇢)� v0
⇢jam
�2

ITS For Crowds
Intelligent Crowd Management Prof. dr. Serge Hoogendoorn
4

5
Engineering challenges for events or regular situations… • Can we for a certain design or event
predict if a safety or throughput issue will occur?
• Can we develop methods to support organisation, planning and design?
• Can we develop approaches to support safe and efficient real-time management of (large) pedestrian flows?
Presentation will go into recent developments in the field op real-time crowd management support with key elements: real-time monitoring & prediction

WiFi/BT data on Utrecht Central Station
Managing Station Pedestrian Flows • Dutch railway (ProRail and NS) with
support of TU Delft have been working on SmartStation concept
• Multi-level data collection system • Detailed density collection at pinch
points (e.g. platforms) • WiFi / BlueTooth at station level • Combination with Chipcard data
provides comprehensive monitoring information for ex-post assessment and real-time interventions
Trajectory data from one of the platforms

7
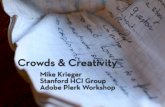
Monitoring and predicting active traffic in cities (for regular and event conditions)• Unique pilots with crowd management system
for large scale, outdoor event • Functional architecture of SAIL 2015 crowd
management systems, also used for Europride, Mysteryland, Kingsday
• Phase 1 focussed on monitoring and diagnostics (data collection, number of visitors, densities, walking speeds, determining levels of service and potentially dangerous situations)
• Phase 2 focusses on prediction and decision support for crowd management measure deployment (model-based prediction, intervention decision support)
Data fusion and
state estimation: hoe many people are there and how
fast do they move?
Social-media analyser: who are
the visitors and what are they talking
about?
Bottleneck inspector: wat are potential
problem locations?
State predictor: what will the situation look like in 15
minutes?
Route estimator:
which routes are people
using?
Activity estimator: what are people doing?
Intervening: do we need to apply certain
measures and how?

Example of tracking data collected during SAIL 2015
Additional data fro counting cameras, Wifi trackers, etc., provide comprehensive real-time picture of situation during event
Plans to use this as a basis for the Amsterdam Smart Tourist dashboard

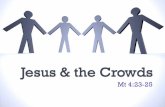
Example dashboard outcomes
• Newly developed algorithm to distinguish between occupancy time and walking time
• Other examples show volumes and OD flows • Results used for real-time intervention, but also for
planning of SAIL 2020 (simulation studies)0
5
10
15
20
25
30
11 12 13 14 15 16 17 18 19
Verblijf) en+looptijden+Veemkade
verblijftijd looptijd
1988
1881
4760
4958
2202
1435
6172
59994765 4761
4508
3806
3315
2509
17523774
4061
2629
13592654
21391211
1439
2209
1638
2581
311024653067
2760

Example dashboard outcomes
• Social media analytics show potential of using information as an additional source of information for real-time intervention and for planning purposes

Example dashboard outcomes
• Sentiment analysis allows gaining insight into locations where people tweet about crowdedness conditions
• More generally, focus is on use of social (media) data (in conjunction with other data sources) to unravel urban transportation flows
• First phase of active mode mobility lab (part of UML)
Druk
Vol
Gedrang
Bomvol
Boordevol
Afgeladen
Volgepakt
Crowded
Busy
Jam
Jam-
Buitenlandse toeristen
Inwoners Amsterdam

Social media data based count reproduction
• Is it possible to reconstruct counts from social-media data?
• Compare different methods to see which represents measurements of density using WiFi/BT
• Time-space averaging provides poor results
• Speed and flow based methods look very promising!
12

Mysteryland pilot
• Data collection via dedicated Mysteryland app (light and heavy version)
• Use of geofencing to ask participants about experiences (rating) and intentions (which stage to visit next) allowing us to test crowd sourcing
• Combination with social-media data allows looking for cross-correlations in data sets as well as data enrichment
• But… app allows us also to provide information to visitors on routes, and guide them to less crowded areas 13

Case: mysteryland music festival
Mysteryland pilot
14

Modelling for planning
Application of differential game theory: • Pedestrians minimise predicted walking cost, due
to straying from intended path, being too close to others / obstacles and effort, yielding:
• Simplified model is similar to Social Forces model of Helbing
Face validity? • Model results in reasonable macroscopic flow characteristics (capacity
values and fundamental diagram)• What about self-organisation?
15
FROM MICROSCOPIC TO MACROSCOPIC INTERACTIONMODELING
SERGE P. HOOGENDOORN
1. Introduction
This memo aims at connecting the microscopic modelling principles underlying thesocial-forces model to identify a macroscopic flow model capturing interactions amongstpedestrians. To this end, we use the anisotropic version of the social-forces model pre-sented by Helbing to derive equilibrium relations for the speed and the direction, giventhe desired walking speed and direction, and the speed and direction changes due tointeractions.
2. Microscopic foundations
We start with the anisotropic model of Helbing that describes the acceleration ofpedestrian i as influence by opponents j:
(1) ~ai
=~v0i
� ~vi
⌧i
�Ai
X
j
exp
�R
ij
Bi
�· ~n
ij
·✓�i
+ (1� �i
)1 + cos�
ij
2
◆
where Rij
denotes the distance between pedestrians i and j, ~nij
the unit vector pointingfrom pedestrian i to j; �
ij
denotes the angle between the direction of i and the postionof j; ~v
i
denotes the velocity. The other terms are all parameters of the model, that willbe introduced later.
In assuming equilibrium conditions, we generally have ~ai
= 0. The speed / directionfor which this occurs is given by:
(2) ~vi
= ~v0i
� ⌧i
Ai
X
j
exp
�R
ij
Bi
�· ~n
ij
·✓�i
+ (1� �i
)1 + cos�
ij
2
◆
Let us now make the transition to macroscopic interaction modelling. Let ⇢(t, ~x)denote the density, to be interpreted as the probability that a pedestrian is present onlocation ~x at time instant t. Let us assume that all parameters are the same for allpedestrian in the flow, e.g. ⌧
i
= ⌧ . We then get:(3)
~v = ~v0(~x)� ⌧A
ZZ
~y2⌦(~x)
exp
✓� ||~y � ~x||
B
◆✓�+ (1� �)
1 + cos�xy
(~v)
2
◆~y � ~x
||~y � ~x||⇢(t, ~y)d~y
Here, ⌦(~x) denotes the area around the considered point ~x for which we determine theinteractions. Note that:
(4) cos�xy
(~v) =~v
||~v|| ·~y � ~x
||~y � ~x||1
Level of anisotropy reflected by this parameter
~vi
~v0i
~ai
~nij
~xi
~xj

• Simple model shows plausible self-organised phenomena
• Model also shows flow breakdown in case of overloading
• Similar model has been successfully used for planning of SAIL, but it is questionable if for real-time purposes such a model would be useful, e.g. due to complexity
• Coarser models proposed so far turn out to have limited predictive validity, and are unable to reproduce self-organised patterns
• Develop continuum model based on game-theoretical model NOMAD…
Microscopic models are too computationally complex for real-time application and lack nice analytical properties…

Modelling for real-time predictions
• NOMAD / Social-forces model as starting point:
• Equilibrium relation stemming from model (ai = 0):
• Interpret density as the ‘probability’ of a pedestrian being present, which gives a macroscopic equilibrium relation (expected velocity), which equals:
• Combine with conservation of pedestrian equation yields complete model, but numerical integration is computationally very demanding
17
FROM MICROSCOPIC TO MACROSCOPIC INTERACTIONMODELING
SERGE P. HOOGENDOORN
1. Introduction
This memo aims at connecting the microscopic modelling principles underlying thesocial-forces model to identify a macroscopic flow model capturing interactions amongstpedestrians. To this end, we use the anisotropic version of the social-forces model pre-sented by Helbing to derive equilibrium relations for the speed and the direction, giventhe desired walking speed and direction, and the speed and direction changes due tointeractions.
2. Microscopic foundations
We start with the anisotropic model of Helbing that describes the acceleration ofpedestrian i as influence by opponents j:
(1) ~ai
=~v0i
� ~vi
⌧i
�Ai
X
j
exp
�R
ij
Bi
�· ~n
ij
·✓�i
+ (1� �i
)1 + cos�
ij
2
◆
where Rij
denotes the distance between pedestrians i and j, ~nij
the unit vector pointingfrom pedestrian i to j; �
ij
denotes the angle between the direction of i and the postionof j; ~v
i
denotes the velocity. The other terms are all parameters of the model, that willbe introduced later.
In assuming equilibrium conditions, we generally have ~ai
= 0. The speed / directionfor which this occurs is given by:
(2) ~vi
= ~v0i
� ⌧i
Ai
X
j
exp
�R
ij
Bi
�· ~n
ij
·✓�i
+ (1� �i
)1 + cos�
ij
2
◆
Let us now make the transition to macroscopic interaction modelling. Let ⇢(t, ~x)denote the density, to be interpreted as the probability that a pedestrian is present onlocation ~x at time instant t. Let us assume that all parameters are the same for allpedestrian in the flow, e.g. ⌧
i
= ⌧ . We then get:(3)
~v = ~v0(~x)� ⌧A
ZZ
~y2⌦(~x)
exp
✓� ||~y � ~x||
B
◆✓�+ (1� �)
1 + cos�xy
(~v)
2
◆~y � ~x
||~y � ~x||⇢(t, ~y)d~y
Here, ⌦(~x) denotes the area around the considered point ~x for which we determine theinteractions. Note that:
(4) cos�xy
(~v) =~v
||~v|| ·~y � ~x
||~y � ~x||1
FROM MICROSCOPIC TO MACROSCOPIC INTERACTIONMODELING
SERGE P. HOOGENDOORN
1. Introduction
This memo aims at connecting the microscopic modelling principles underlying thesocial-forces model to identify a macroscopic flow model capturing interactions amongstpedestrians. To this end, we use the anisotropic version of the social-forces model pre-sented by Helbing to derive equilibrium relations for the speed and the direction, giventhe desired walking speed and direction, and the speed and direction changes due tointeractions.
2. Microscopic foundations
We start with the anisotropic model of Helbing that describes the acceleration ofpedestrian i as influence by opponents j:
(1) ~ai
=~v0i
� ~vi
⌧i
�Ai
X
j
exp
�R
ij
Bi
�· ~n
ij
·✓�i
+ (1� �i
)1 + cos�
ij
2
◆
where Rij
denotes the distance between pedestrians i and j, ~nij
the unit vector pointingfrom pedestrian i to j; �
ij
denotes the angle between the direction of i and the postionof j; ~v
i
denotes the velocity. The other terms are all parameters of the model, that willbe introduced later.
In assuming equilibrium conditions, we generally have ~ai
= 0. The speed / directionfor which this occurs is given by:
(2) ~vi
= ~v0i
� ⌧i
Ai
X
j
exp
�R
ij
Bi
�· ~n
ij
·✓�i
+ (1� �i
)1 + cos�
ij
2
◆
Let us now make the transition to macroscopic interaction modelling. Let ⇢(t, ~x)denote the density, to be interpreted as the probability that a pedestrian is present onlocation ~x at time instant t. Let us assume that all parameters are the same for allpedestrian in the flow, e.g. ⌧
i
= ⌧ . We then get:(3)
~v = ~v0(~x)� ⌧A
ZZ
~y2⌦(~x)
exp
✓� ||~y � ~x||
B
◆✓�+ (1� �)
1 + cos�xy
(~v)
2
◆~y � ~x
||~y � ~x||⇢(t, ~y)d~y
Here, ⌦(~x) denotes the area around the considered point ~x for which we determine theinteractions. Note that:
(4) cos�xy
(~v) =~v
||~v|| ·~y � ~x
||~y � ~x||1
FROM MICROSCOPIC TO MACROSCOPIC INTERACTIONMODELING
SERGE P. HOOGENDOORN
1. Introduction
This memo aims at connecting the microscopic modelling principles underlying thesocial-forces model to identify a macroscopic flow model capturing interactions amongstpedestrians. To this end, we use the anisotropic version of the social-forces model pre-sented by Helbing to derive equilibrium relations for the speed and the direction, giventhe desired walking speed and direction, and the speed and direction changes due tointeractions.
2. Microscopic foundations
We start with the anisotropic model of Helbing that describes the acceleration ofpedestrian i as influence by opponents j:
(1) ~ai
=~v0i
� ~vi
⌧i
�Ai
X
j
exp
�R
ij
Bi
�· ~n
ij
·✓�i
+ (1� �i
)1 + cos�
ij
2
◆
where Rij
denotes the distance between pedestrians i and j, ~nij
the unit vector pointingfrom pedestrian i to j; �
ij
denotes the angle between the direction of i and the postionof j; ~v
i
denotes the velocity. The other terms are all parameters of the model, that willbe introduced later.
In assuming equilibrium conditions, we generally have ~ai
= 0. The speed / directionfor which this occurs is given by:
(2) ~vi
= ~v0i
� ⌧i
Ai
X
j
exp
�R
ij
Bi
�· ~n
ij
·✓�i
+ (1� �i
)1 + cos�
ij
2
◆
Let us now make the transition to macroscopic interaction modelling. Let ⇢(t, ~x)denote the density, to be interpreted as the probability that a pedestrian is present onlocation ~x at time instant t. Let us assume that all parameters are the same for allpedestrian in the flow, e.g. ⌧
i
= ⌧ . We then get:(3)
~v = ~v0(~x)� ⌧A
ZZ
~y2⌦(~x)
exp
✓� ||~y � ~x||
B
◆✓�+ (1� �)
1 + cos�xy
(~v)
2
◆~y � ~x
||~y � ~x||⇢(t, ~y)d~y
Here, ⌦(~x) denotes the area around the considered point ~x for which we determine theinteractions. Note that:
(4) cos�xy
(~v) =~v
||~v|| ·~y � ~x
||~y � ~x||1

Modelling for real-time predictions
• Taylor series approximation: yields a closed-form expression for the equilibrium velocity , which is given by the equilibrium speed and direction:
with:• Check behaviour of model by looking at isotropic flow ( ) and homogeneous flow
conditions ( ) • Include conservation of pedestrian relation gives a complete model…
18
2 SERGE P. HOOGENDOORN
From this expression, we can find both the equilibrium speed and the equilibrium direc-tion, which in turn can be used in the macroscopic model.
We can think of approximating this expression, by using the following linear approx-imation of the density around ~x:
(5) ⇢(t, ~y) = ⇢(t, ~x) + (~y � ~x) ·r⇢(t, ~x) +O(||~y � ~x||2)
Using this expression into Eq. (3) yields:
(6) ~v = ~v0(~x)� ~↵(~v)⇢(t, ~x)� �(~v)r⇢(t, ~x)
with ↵(~v) and �(~v) defined respectively by:
(7) ~↵(~v) = ⌧A
ZZ
~y2⌦(~x)
exp
✓� ||~y � ~x||
B
◆✓�+ (1� �)
1 + cos�xy
(~v)
2
◆~y � ~x
||~y � ~x||d~y
and
(8) �(~v) = ⌧A
ZZ
~y2⌦(~x)
exp
✓� ||~y � ~x||
B
◆✓�+ (1� �)
1 + cos�xy
(~v)
2
◆||~y � ~x||d~y
To investigate the behaviour of these integrals, we have numerically approximatedthem. To this end, we have chosen ~v( ) = V · (cos , sin ), for = 0...2⇡. Fig. 1 showsthe results from this approximation.
0 1 2 3 4 5 6 7−0.25
−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
angle
valu
e
α
1
α2
β
Figure 1. Numerical approximation of ~↵(~v) and �(~v).
For the figure, we can clearly see that � is independent on ~v, i.e.
(9) �(~v) = �0
FROM MICROSCOPIC TO MACROSCOPIC INTERACTION MODELING 3
Furthermore, we see that for ~↵, we find:
(10) ~↵(~v) = ↵0 ·~v
||~v||
(Can we determine this directly from the integrals?)From Eq. (6), with ~v = ~e · V we can derive:
(11) V = ||~v0 � �0 ·r⇢||� ↵0⇢
and
(12) ~e =~v0 � �0 ·r⇢
V + ↵0⇢=
~v0 � �0 ·r⇢
||~v0 � �0 ·r⇢||
Note that the direction does not depend on ↵0, which implies that the magnitude ofthe density itself has no e↵ect on the direction, while the gradient of the density does
influence the direction.
2.1. Homogeneous flow conditions. Note that in case of homogeneous conditions,i.e. r⇢ = ~0, Eq. (11) simplifies to
(13) V = ||~v0||� ↵0⇢ = V 0 � ↵0⇢
i.e. we see a linear relation between speed and density. For the direction ~e, we then get:
(14) ~e =~v0
V + ↵0⇢= ~e0
In other words, in homogeneous density conditions the direction of the pedestrians isequal to the desired direction.
2.2. Isotropic walking behaviour. Let us also note that in case � = 1 (isotropicflow), and assuming that ⌦ is symmetric around ~x, we get:
(15) ~↵(~v) = ⌧A
ZZ
~y2⌦(~x)
exp
✓� ||~y � ~x||
B
◆~y � ~x
||~y � ~x||d~y = ~0
which means ↵0 = 0. In this case, we have:
(16) V = ||~v0 � �0 ·r⇢||
This expression shows that in this case, the speed is only dependent on the densitygradient. If a pedestrian walks into a region in which the density is increasing, the speedwill be less than the desired speed; and vice versa. Also note that in case of homogenousconditions, the speed will be constant and equal to the free speed. Note that this isconsistent with the results from Hoogendoorn, ISTTT-2003.
For the direction, we find:
(17) ~e =~v0 � �0 ·r⇢
||~v0 � �0 ·r⇢||
FROM MICROSCOPIC TO MACROSCOPIC INTERACTION MODELING 3
Furthermore, we see that for ~↵, we find:
(10) ~↵(~v) = ↵0 ·~v
||~v||
(Can we determine this directly from the integrals?)From Eq. (6), with ~v = ~e · V we can derive:
(11) V = ||~v0 � �0 ·r⇢||� ↵0⇢
and
(12) ~e =~v0 � �0 ·r⇢
V + ↵0⇢=
~v0 � �0 ·r⇢
||~v0 � �0 ·r⇢||
Note that the direction does not depend on ↵0, which implies that the magnitude ofthe density itself has no e↵ect on the direction, while the gradient of the density does
influence the direction.
2.1. Homogeneous flow conditions. Note that in case of homogeneous conditions,i.e. r⇢ = ~0, Eq. (11) simplifies to
(13) V = ||~v0||� ↵0⇢ = V 0 � ↵0⇢
i.e. we see a linear relation between speed and density. For the direction ~e, we then get:
(14) ~e =~v0
V + ↵0⇢= ~e0
In other words, in homogeneous density conditions the direction of the pedestrians isequal to the desired direction.
2.2. Isotropic walking behaviour. Let us also note that in case � = 1 (isotropicflow), and assuming that ⌦ is symmetric around ~x, we get:
(15) ~↵(~v) = ⌧A
ZZ
~y2⌦(~x)
exp
✓� ||~y � ~x||
B
◆~y � ~x
||~y � ~x||d~y = ~0
which means ↵0 = 0. In this case, we have:
(16) V = ||~v0 � �0 ·r⇢||
This expression shows that in this case, the speed is only dependent on the densitygradient. If a pedestrian walks into a region in which the density is increasing, the speedwill be less than the desired speed; and vice versa. Also note that in case of homogenousconditions, the speed will be constant and equal to the free speed. Note that this isconsistent with the results from Hoogendoorn, ISTTT-2003.
For the direction, we find:
(17) ~e =~v0 � �0 ·r⇢
||~v0 � �0 ·r⇢||
α 0 = πτAB2 (1− λ) and β0 = 2πτAB3(1+ λ)
4.1. Analysis of model properties
Let us first take a look at expressions (14) and (15) describing the equilibrium290
speed and direction. Notice first that the direction does not depend on ↵0, which
implies that the magnitude of the density itself has no e↵ect, and that only the
gradient of the density does influence the direction. We will now discuss some
other properties, first by considering a homogeneous flow (r⇢ = ~0), and then
by considering an isotropic flow (� = 1) and an anisotropic flow (� = 0).295
4.1.1. Homogeneous flow conditions
Note that in case of homogeneous conditions, i.e. r⇢ = ~0, Eq. (14) simplifies
to
V = ||~v0||� ↵0⇢ = V 0 � ↵0⇢ (16)
i.e. we see a linear relation between speed and density. The term ↵0 � 0
describes the reduction of the speed with increasing density.300
For the direction ~e, we then get:
~e =~v0
||~v0|| = ~e0 (17)
In other words, in homogeneous density conditions the direction of the pedestri-
ans is equal to the desired direction. Clearly, the gradient of the density yields
pedestrians to divert from their desired direction.
Looking further at the expressions for ↵0 and �0, we can see the influence of305
the various parameters on their size; ↵0 scales linearly with A and ⌧ , meaning
that the influence of the density on the speed increases with increasing values
of A and ⌧ . At the same time, larger values for B imply a reduction of the
influence of the density. Needs to be revised!
The same can be concluded for the influence of the gradient: we see linear310
scaling for A and ⌧ , and reducing influence with larger values of B. This holds
for the equilibrium speed and direction. Needs to be revised!
13
4.1. Analysis of model properties
Let us first take a look at expressions (14) and (15) describing the equilibrium290
speed and direction. Notice first that the direction does not depend on ↵0, which
implies that the magnitude of the density itself has no e↵ect, and that only the
gradient of the density does influence the direction. We will now discuss some
other properties, first by considering a homogeneous flow (r⇢ = ~0), and then
by considering an isotropic flow (� = 1) and an anisotropic flow (� = 0).295
4.1.1. Homogeneous flow conditions
Note that in case of homogeneous conditions, i.e. r⇢ = ~0, Eq. (14) simplifies
to
V = ||~v0||� ↵0⇢ = V 0 � ↵0⇢ (16)
i.e. we see a linear relation between speed and density. The term ↵0 � 0
describes the reduction of the speed with increasing density.300
For the direction ~e, we then get:
~e =~v0
||~v0|| = ~e0 (17)
In other words, in homogeneous density conditions the direction of the pedestri-
ans is equal to the desired direction. Clearly, the gradient of the density yields
pedestrians to divert from their desired direction.
Looking further at the expressions for ↵0 and �0, we can see the influence of305
the various parameters on their size; ↵0 scales linearly with A and ⌧ , meaning
that the influence of the density on the speed increases with increasing values
of A and ⌧ . At the same time, larger values for B imply a reduction of the
influence of the density. Needs to be revised!
The same can be concluded for the influence of the gradient: we see linear310
scaling for A and ⌧ , and reducing influence with larger values of B. This holds
for the equilibrium speed and direction. Needs to be revised!
13
!v = !e ⋅V

19
Macroscopic model yields plausible results…• First macroscopic model able to
reproduce self-organised patterns (lane formation, diagonal stripes)
• Self-organisation breaks downs in case of overloading
• Continuum model seems to inherit properties of the microscopic model underlying it
• Forms solid basis for real-time prediction module in dashboard
• First trials in model-based optimisation and use of model for state-estimation are promising

Predicting flow operations in Laussanne
• Work performed by Flurin Haenseler showing how LOS can be predicted by using macroscopic model
• Example shows LOS in one of the corridors connecting platforms in the station
• Flow model + route choice model used for Origin-Destination matrix estimation using counts and time-table information

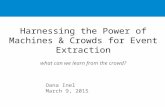
Towards active interventions
• Models can be used to improve design• Off-line model-based optimisation of signage /
evacuation instructions (see example)• Crowd Monitoring Dashboard Amsterdam has been used
by crowd managers for real-time changes in circulation plan (making some of the routes uni-directional)
• Other measures (in particular in stations) include load balancing (changing time table, stop position of train, track assignment), but also gating application
• Current research focusses on these type of interventions21
x−axis (m)
y−a
xis
(m)
Densities at t = 25.1 s
5 10 15 20 25 30 35 40 45 50
5
10
15
20
25
30
35
40
45
50
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
x−axis (m)
y−a
xis
(m)
Densities at t = 125.1 s
5 10 15 20 25 30 35 40 45 50
5
10
15
20
25
30
35
40
45
50
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
x−axis (m)
y−a
xis
(m)
Densities at t = 50.1 s
5 10 15 20 25 30 35 40 45 50
5
10
15
20
25
30
35
40
45
50
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
x−axis (m)
y−a
xis
(m)
Densities at t = 125.1 s
5 10 15 20 25 30 35 40 45 50
5
10
15
20
25
30
35
40
45
50
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5No redistribution of queues (initial iteration)
Distribution of queues considering reduced speeds
x−axis (m)
y−a
xis
(m)
Densities at t = 25.1 s
5 10 15 20 25 30 35 40 45 50
5
10
15
20
25
30
35
40
45
50
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
x−axis (m)
y−a
xis
(m)
Densities at t = 125.1 s
5 10 15 20 25 30 35 40 45 50
5
10
15
20
25
30
35
40
45
50
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
x−axis (m)
y−a
xis
(m)
Densities at t = 50.1 s
5 10 15 20 25 30 35 40 45 50
5
10
15
20
25
30
35
40
45
50
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
x−axis (m)
y−a
xis
(m)
Densities at t = 125.1 s
5 10 15 20 25 30 35 40 45 50
5
10
15
20
25
30
35
40
45
50
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5No redistribution of queues (initial iteration)
Distribution of queues considering reduced speeds

Recall the P-MFD? Ensuring that the number of pedestrians in a railway stations states below critical level
by means of gating…

The ALLEGRO programme
unrAvelLing sLow modE travelinG and tRaffic: with innOvative data to a new transportation and traffic theory for
pedestrians and bicycles”
• 4.1 million AUD personal grant with a focus on developing theory (from an application oriented perspective) sponsored by the ERC and AMS
• Relevant elements of the project: • Development of “living” data & simulation laboratory building on two decades of experience in
pedestrian monitoring, theory and simulation• Outreach to cities by means of “solution-oriented” projects (“the AMS part”), e.g. event planning
framework, design and crowd management strategies, active mode operations dashboard, etc.• Team is complete (9 PhD and 4 PD + 8 supervisors / support staff )

25
Questions?