IT for Error Remediation And Trapping Emergencies … · The document is divided into three main...
18
Deliverable No. 6.1. Dissemination Level (PU) Grant Agreement Number: 218496 ITERATE IT for Error Remediation And Trapping Emergencies D6.1 System Specifications and Guidelines for implementation Deliverable No. (use the number indicated on technical annex) D6.1 Workpackage No. WP6 Workpackage Title Model numerical development and tuning Editor (Editor/Main responsible for D incl. contact details) Aladino Amantini [email protected] Authors (per company) Aladino Amantini Status (F: Final; ECS: EC Submission; RC: Review Copy: D: draft): EC Reviewed and approved for submission (name and date) Björn Peters, VTI 2010/09/09 EUROPEAN COMMISSION DG RESEARCH A FP7 Collaborative Project Work programme: Sustainable Surface Transport SST.2007.4.1.2: Human physical and behavioural components
-
Upload
trinhquynh -
Category
Documents
-
view
212 -
download
0
Transcript of IT for Error Remediation And Trapping Emergencies … · The document is divided into three main...

Deliverable No. 6.1. Dissemination Level (PU) Grant Agreement
Number: 218496
ITERATE
IT for Error Remediation And Trapping Emergencies
D6.1 System Specifications and Guidelines for
implementation
Deliverable No. (use the number indicated
on technical annex) D6.1
Workpackage No. WP6
Workpackage Title Model numerical development and tuning
Editor (Editor/Main responsible for D incl.
contact details) Aladino Amantini [email protected]
Authors (per company) Aladino Amantini
Status (F: Final; ECS: EC Submission; RC:
Review Copy: D: draft): EC
Reviewed and approved for submission
(name and date) Björn Peters, VTI 2010/09/09
EUROPEAN COMMISSION DG RESEARCH
A FP7 Collaborative Project
Work programme: Sustainable Surface Transport
SST.2007.4.1.2: Human physical and behavioural components

Deliverable No. 6.1 Dissemination Level (PU) Grant Agreement
Number: 218496
ii
Document History Table
Version
No. Date Details
V0.1 2010/07/20 First draft
V1.0 2010/08/30 Final
V1.1 2010/09/09 Reviewed version, EC submission

Deliverable No. 6.1 Dissemination Level (PU) Grant Agreement
Number: 218496
iii
List of abbreviations
DoW Description of Work
DVESim Driver, Vehicle and Environment Simulator
GUI Graphical User Interface
HF Human Factors
SiMUD Simulator of Model of Unified Driver
UMD Unified Model of Driver

Deliverable No. 6.1 Dissemination Level (PU) Grant Agreement
Number: 218496
iv
Table of Contents
1. Introduction .................................................................................................................. 1
2. Project interactions ....................................................................................................... 2
3. System Specifications .................................................................................................... 3
3.1 Software overview .......................................................................................................... 3
3.2 Software users................................................................................................................. 4
3.3 Software functionalities .................................................................................................. 5
4. Guidelines for Implementation ...................................................................................... 7
4.1 Software architecture ..................................................................................................... 7
4.2 Runtime behaviour .......................................................................................................... 7
4.3 UMD ................................................................................................................................ 9
4.4 Language and environment .......................................................................................... 10
5. Conclusions ................................................................................................................. 11
6. References................................................................................................................... 12

Deliverable No. 6.1 Dissemination Level (PU) Grant Agreement
Number: 218496
v
List of Figures
Figure 1: ITERATE UMD Behaviour .......................................................................................................... 2
Figure 2: DVESim Use Case ...................................................................................................................... 4
Figure 3: Configuration file hierarchy ...................................................................................................... 5
Figure 4: Architecture of DVESim and its components ........................................................................... 7
Figure 5: DVE loop ................................................................................................................................... 8
Figure 6: SiMUD drivers ........................................................................................................................... 9
Figure 7: SiMUD interactions .................................................................................................................. 9

Deliverable No. 6.1 Dissemination Level (PU) Grant Agreement
Number: 218496
vi
EXECUTIVE SUMMARY
WP6, “Model development and tuning” deals with the implementation of the Unified Model of
Driver (UMD). Such a model will be derived form the theoretical architecture developed in WP1 and
the analysis of experimental data performed in WP5.
Outcome of WP6 is a software representation of the model able to perform numerical simulation
and computing driver performances and driving profiles. The software will be used in WP7 to validate
the UMD comparing simulations with experimental data and verifying the correctness of the
developed model.
In order to implement in the most effective way the UMD and the simulator a clear view of the
requirements and specification have to be defined, including software architecture, functionalities
and runtime behaviour. For this purpose the document explains the design assumptions and goals as
well as the implementation plan. The deliverable will drive subsequent activities of the WP, namely
the development of the software and the tuning of the implemented model according to
experiments and data analysis.

Deliverable No. 6.1 Dissemination Level (PU) Grant Agreement
Number: 218496
Page 1 of 18
1. INTRODUCTION
The document is divided into three main sections.
The first one, Project Interactions describes how the development of the UMD depends on the other
tasks of the project, in particular on how the previous activities have derived a set of requirements
for the model.
The second one, System Specifications, provides a description of what are the goals of the software
and how it is expected to be used. Specific subsections detail that is intended as the final user, how
the user is expected to use the software and what tasks the simulator will support.
The third one, Guidelines for Implementation, adopts a more technically oriented approach and
provides descriptions of the implementation principles and of the expected behaviour at runtime of
the software.
Finally conclusions and considerations on subsequent activities are presented.

Deliverable No. 6.1 Dissemination Level (PU) Grant Agreement
Number: 218496
Page 2 of 18
2. PROJECT INTERACTIONS
The Description of Work (DoW) specifies the two main sources of input for the WP6:
• The theoretical framework developed in WP1
• The analysis of driving performances performed on the basis of the experiments carried out
in WP4 and WP5
The theoretical framework has been fully described in D1.2, in which the driver parameters, which
describe its state and are responsible for its behaviour, have been presented and formalised.
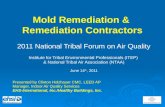
Figure 1 shows the structure of UMD and of its interdependencies.
Figure 1: ITERATE UMD Behaviour
Five main variables have been identified: Culture, Attitudes/Personality, Experience, Driver State and
Task Demand/Workload. Their values are determined by mutual relationships as well as exogenous
environmental factors (Traffic, Road and Visibility).
Both parameters and relationships will be considered into implementation phase and their numeric
values will be determined on the basis of the experimental results, performed on real driver
according to the specification provided in D3.1, and their analysis.
The theoretical framework provides also requirements not only for the driver but also for the
interactions between the driver model and the other components of the scenarios, such as vehicle,
systems, environment, and the final outputs of the model, such as Error propensity, Reaction Time,
Projection to risky situations.

Deliverable No. 6.1 Dissemination Level (PU) Grant Agreement
Number: 218496
Page 3 of 18
3. SYSTEM SPECIFICATIONS
3.1 Software overview
The goal of WP6 is to implement the UMD and a simulator to execute it. Although this could be
achieved by a single monolithic program the approach followed in the project was in favour of a
modular solution, able to manage different behaviours according to different assumptions.
There are many reasons that have motivated such a choice:
• A modular approach increases extensibility of the software supporting on one side the
development of other possible components and features and on the other the reuse of the
code in future applications.
• Code is kept separated following a rationale that reflects maintenance needs and
architectural choices.
• Although the outcome of the project is a single model of the driver/operator, different
models are needed to perform the simulation, such as models of the different kind of
vehicles and environments which are mutually exclusive during the execution of the
simulation. Developing them in dedicated modules is a choice that meets both logical and
functionality requirements.
• For each simulation running, only the chosen modules are loaded and executed, avoiding
the wasting of memory by unneeded instructions and data.
However, the usage of modules implies some particular issues that are worth of consideration:
• The software will show a greater degree of complexity and will have to manage typical issues
and problems of module integration both during coding and at runtime (dependencies,
compatibility, dynamic loading and unloading…)
• In order to be correctly loaded and executed, modules must provide their functionalities
through a well-defined single interface common for all. The interface must be defined in the
early stage of design and a lot of attention has to be dedicated to this task since further
modification to the interface might have strong repercussions on the rest of the program
and large modification to the code might be needed.
According to what has just been described the final simulator will include two main conceptual
components:
• DVESim (Driver, Vehicle, Environment Simulator): which is the main engine of the simulator
and will supervise its execution.
• SiMUD (Simulator of Model of Unified Driver): which is a suite of modules that will be used
by DVESim to perform simulations of the UMD.
A complete description of the software architecture, including DVESim and SiMUD interactions, will
be provided in section 4.1.
As declared in the DoW the primary aim of the software is to implement the theoretical concepts
into a running tool able to perform fast and reliable representations of Driver Vehicle and
Environment interactions and to predict the Driver behavior. However the platform can be also used
for other purposes:

Deliverable No. 6.1 Dissemination Level (PU) Grant Agreement
Number: 218496
Page 4 of 18
• Developing and testing new models of drivers, or extending UMD with new features
• Appling new models of vehicles (cars, trains, ships)
• Appling new models of environment (road map, track geometry, courses or environmental
condition)
• Defining and studying different scenarios to investigate driving performances.
3.2 Software users
Two different types of end user are supposed to make use of the software: Model Developers and
Human Factor Experts (HF Experts). Such roles are not meant to be absolutely disparate, since a user
can have both roles.
Model developer
Model developers are programmers implementing driver, vehicle or environment models to be used
by DVESim. They enrich the platform with modules providing different behaviours and features.
Within ITERATE Model developers will be responsible for the implementation of SiMUD modules.
HF expert
HF experts will execute the DVESim to perform simulations, defining scenarios and using models
created by Model developers. They will analyse the generated output to verify assumptions and
derive conclusions.
Within ITERATE HF experts will be responsible for the validation of the UMD.
If responsibility for the model is shared by different people, a certain level of interaction must be
considered since Model developers will design and implement the modules according to the
specifications of HF experts.
Figure 2: DVESim Use Case

Deliverable No. 6.1 Dissemination Level (PU) Grant Agreement
Number: 218496
Page 5 of 18
In Figure 2 a representation of the interactions between users and software components is shown.
3.3 Software functionalities
The functionalities of the simulator will be presented according to the different phases of the
software usage, namely the configuration, the execution and the management of the output.
Configuration
DVESim is configured by a XML file.
Its syntax will be defined by a proper XSD file. The file has a very simple structure and will include
two kind of information:
• Global parameters of the simulation, such as length and time step interval.
• Modules to load and path of their configuration files.
In fact modules have distinct configuration files and their specific behaviour is not defined in the
main configuration file of DVESim. Instead their parameterization and starting conditions are coded
in their own configuration files.
Figure 3: Configuration file hierarchy

Deliverable No. 6.1 Dissemination Level (PU) Grant Agreement
Number: 218496
Page 6 of 18
This approach determines a sort of hierarchy of configuration files of which an example is shown in
Figure 3. It is worth to note that even configuration files can too rely on other files, for instance in
SiMUD the environment model for a car based simulation can include an OpenDrive[1] definition of
the road geometry in a .xodr file.
Configuration files of the modules are not forced to be xml files and Model Developers can define
whatever syntax they want according to their needs and preferences. However the firs alternative
should be encouraged and preferred in order to maintain a coherent syntax and structure in the
different configuration files and SiMUD modules will adopt this choice.
Definition of the scenarios is performed editing the configuration files and setting the desired values
to corresponding parameters. No tool or function is provided to perform this task, but being xml files
in plain text format any text editor can be used for this purpose.
Execution
DVESim is executed from a command line. It does not depend on a Graphical User Interface (GUI) to
manage the simulation or to show results. It executes a purely computational task, so it will not
show windows or expect any kind of input from the user. The rationale is to speed up computation
and time of the simulation in order to make possible the automation of execution and the
generation of data corresponding to a wide range of scenarios having different starting conditions.
Possibly a basic visualization of the trends of the main variables will be provided to support
developing and debugging phases.
Output management
The results of a simulation will be stored in log files in text format. DVESim is not intended to show
results of single or aggregated simulations. Instead its goal is to provide data in a simple and
standard format that could be easily used as input by other applications of various type scope which
might include:
• Graphical rendering of the simulation
• Computation of the generated data
• Plotting of graphics
• Comparison with results of other tests

Deliverable No. 6.1 Dissemination Level (PU) Grant Agreement
Number: 218496
Page 7 of 18
4. GUIDELINES FOR IMPLEMENTATION
4.1 Software architecture
Figure 4 provides a synthetic view of the software components and of their interactions.
Figure 4: Architecture of DVESim and its components
Three main types of components can be identified as follows:
Main executable
It includes the main engine of the simulator (DVESim), in green in the figure. It is responsible for the
correct behaviour of the simulation and for the interaction of the models.
Dynamic libraries
They are loaded at runtime and include the models that need to be instantiated, shown in orange in
Figure 3. Several modules could be implemented and make available for HF Expert during simulation,
but within ITERATE only those needed for the project (i.e. SiMUD modules) will be developed and
used.
Static libraries
Both the executable and the modules rely on some libraries, shown in yellow in Figure 3. They
provide basic functions and common data types that can be shared among all the components such
as DVELib or just in some particular components such as UMDLib used in SiMUD modules and
ODRLib, used to represent the road.
4.2 Runtime behaviour
At runtime the steps executed by the program are as follows:
1. DVESim parses its configuration file and detects what modules must be loaded and the path
of their configuration files.

Deliverable No. 6.1 Dissemination Level (PU) Grant Agreement
Number: 218496
Page 8 of 18
2. Modules are loaded and models instantiated.
3. Configuration files of the modules are parsed and the models are initialised accordingly.
4. Models are linked together so they can interact.
5. The simulation loop is started.
6. The simulation loop is performed until end conditions are met.
7. Modules are unloaded.
8. The simulation ends.
Points 5 and 6 mention the simulation loop (Figure 5), which is an iterative step that advances the
simulation.
Figure 5: DVE loop
For each time step three actions are performed:
1. Each model computes its next status
2. Each model updates its current status
3. Time is increased
When computing its next status a model can read the status of other models. For examples:
• To compute the steering angle vehicle reads the desired steering angle of the driver
• To compute the desired speed the driver reads the visibility of the environment
• To compute the speed the vehicle reads the friction environment
For this reason each model has access to the status of the other models, but of course only in
reading. From a logical point of view the driver is the main actor who collects data from the vehicle
and the environment and actively performs actions to change his own and the vehicle status, for
instance deciding to undertake a different task or pressing the accelerator pedal of the vehicle.
However, in the simulator, each model is responsible for updating its own state and does not
provide interfaces to other models for updating itself. This choice has been made in order to support
the modular architecture of the DVESim in a synchronous simulation process.
End conditions, that determines the conclusion of the simulation, can include elapsed time, covered
distance or position of the vehicle.

Deliverable No. 6.1 Dissemination Level (PU) Grant Agreement
Number: 218496
Page 9 of 18
4.3 UMD
As defined in the DoW, the aim of UMD is to be “applicable to and validate for all the surface
transport modes”. However even if a single theoretical model can be applied to different domains,
from an implementation point of view it will not be enough. Different domains imply different
actions that can be performed, dependencies among variables, interactions among the components
of the simulation. In sum, they imply different interfaces. For instance a car driver has to be able to
steer, while this is not required by a train driver, even if they share the same behavioural model.
For this reason different modules will be actually implemented, each one of which will adapt the
generic UMD to a different environment.
Figure 7 shows how this choice will be accomplished during the development phase. A general
model of the driver will be implemented. It will include all the logic of the driver and common
aspects shared by more specific drivers. This includes parameters representing the mental status of
the driver and the reciprocal correlations affecting their values.
Figure 6: SiMUD drivers
Figure 7: SiMUD interactions

Deliverable No. 6.1 Dissemination Level (PU) Grant Agreement
Number: 218496
Page 10 of 18
At a lower level specific models of drivers, defining specific behaviours for distinct domains will be
provided. They will be differentiated because of the input they will accept, the output they will
provide and the tasks they will be able to perform.
A similar approach is going to be adopted for the other models of the simulations. In Figure 7 the full
hierarchy of the models is shown, where dashed arrows represents the interactions between the
three topmost level models (in red) and between the train related models (in green).
4.4 Language and environment
DVESim is designed for the Windows XP operating system.
Considering the hierarchical approach introduced in Section 4.3, the adoption of an object-oriented
programming language, able to exploit inheritance mechanisms, is a natural choice. For this reason
DVESim will be coded in C++, using Microsoft Visual Studio 9 (2008).
The recourse to third party software or tools should be avoided and minimized. However when
needed free and open-source solutions should be preferred. For instance Xerces-C++ [2] libraries
have been used to implement the parsers of the configuration files for both DVESim and SiMUD and
free software libraries can be used also for the runtime visualization of the simulation.

Deliverable No. 6.1 Dissemination Level (PU) Grant Agreement
Number: 218496
Page 11 of 18
5. CONCLUSIONS
DVESim simulator tool has been designed to validate the UMD according to the experiments that will
be performed. Particular attention has been posed on the extendibility of the software and on the
need to face different application domains.
The designed infrastructure aims at being as flexible as possible in order to support the
implementation of unexpected behaviours and interactions, but also to allow the modelling
environment to be extended with new functionalities and modules.
DVESim has been designed to be an autonomous tool with very few dependencies on third party
tools and solutions. This is however restricted to its behaviour concerning simulation execution. In
fact other software can use the output generated by DVESim to perform any other task.
In the subsequent developing phase attention should be paid to the input and output exchanged by
the different models in order to ensure a proper dynamic interaction.

Deliverable No. 6.1 Dissemination Level (PU) Grant Agreement
Number: 218496
Page 12 of 18
6. REFERENCES
[1] Marius Dupuis, OpenDRIVE® Format Specification, Rev. 1.1 (2007), VIRES Simulationstechnologie
GmbH, http://www.opendrive.org/
[2] Xerces-C++ XML Parser, http://xerces.apache.org/xerces-c/