ISOPE-P-90-092

of 8
Transcript of ISOPE-P-90-092
-
7/25/2019 ISOPE-P-90-092
1/8
Proceedings
of
he FlIs t PaCljiIAs/G OjJshOle MeLilal l s Symposium
Seoul, Korea, 24 28 June, 1990
CopYllght 1990 by The IntelllatlOnal ouety ofOjJshOle and Palm Engllleeis
THE
ANALYSIS OF WAVE INDUCED DYNAMICS OF OCEAN PLATFORMS
BY HYBRID INTEGRAL EQUATION
METHO
T MatsuI
:- agol'a l'niwjsit.l
:- "gOYd. J P N
K
Kato
Tm ol
a C'oll('gt'
of T( clllloiogy
TOl Dta.
JAP.4S
BSTR CT
A relIable and economical hybrid integral-equation method
is
pro
posed for predicting wave-mduced dynamic responses of ocean
platforms of complex geometry ThIs is based on combming a
dIrect boundary element solution of the fluid region close to the
body wIth an eIgenfunction representation of the far field be
haviour To achieve accuracy and economy, the boundary sur
faces are discretised mto quadratic isoparametnc elements The
validity and accuracy of the proposed method are demonstrated
through several numerical examples, including the results for the
ITT senn-submersible. t is shown that the use of quadratIc
Isoparametric elements leads to significant improvement of accu
racy and efficiency of the hybrid integral-equation method, com
pared WIth classical boundary integral approaches based on con
stant element idealisations
KEY WORDS
Hybnd integral-equatIon method, Wave dIffrac
tIon,
Wave
radiation, Hydrodynamic load, Wave-mduced mohon,
Ocean platform
INTRODUCTION
The design of huge ocean platforms depends critically upon the
analysis of wave induced loads and motions. Thus, over the last
fifteen years, substantial efforts have been devoted to the devel
opment of reliable and economIcal methods for predicting these
effects, Computer programs based on three-dimensional diffrac
tion theory are now available for evaluating the hydrodynamic
coeffiCIents, loads and motIons for structures of practIcal form
For large bodIes with relatively simple geometry such
as
a ver
tical cylinder or sphere, these programs generally provide accu
rate predictions which compare well with analytical solutions and
model test results. Recent surveys for the
ITT
(Takagi et al.,
271
1985) and the ISSC (Eatock Taylor and Jefferys, 1986), however,
suggested that this was not the case for more complicated struc
tures such as a semi-submersible and tensIOn-leg platform (TLP)
The
ITT
Ocean Engmeering Committee has performed a
com-
parative
study
of motions of a senn-submersIble, whIch has been
published by Takagi
et al
(1985) PredIchons from 34 computer
programs were compared among themselves and WIth model test
results from three orgamsations \Vhile most computer programs
provided reasonable predictions of measured surge and
sway,
the
computed results for the other motIOns showed substantIal scatter
about the experiment.al data.
The
three-dImensional dIffractIOn
programs seemed
to
overestimate the heave added mass, lead
ing to longer natural periods
than
those predicted by Monson's
formula or experiment The survey for the ISSC, repubhshed
by Eatock Taylor and Jefferys (1986), also demonstrated sigmfi
cant and disturbing variability between the hydrodynamIC loads
and motions predicted for an example
TLP
by
17
dIffraction pro
grams
Most of the partIcipating organisatIOns employed a source-smk
dIstnbution or direct, boundary Integral formulation, with an as-
sumed constant distnbution of the governmg vanable (source
strength or potential) over each st;rface panel
t
would therefore
not be surprising if a large number of panels were required to
represent the complex geometry of the semi-submersible or TLP,
and the compleXIty of associated wave flows accurately. Indeed,
Korsmeyer et al (1988) adopted up to 12,608 constant source
panels to analyse another TLP with six columns Jefferys (1987)
studIed the same TLP configuration
WIth
different mesh arrange
ments, and cautioned that the constant source panel method did
not necessarily lead to correct answer, as the number of panels
was increased WIthout limit.
-
7/25/2019 ISOPE-P-90-092
2/8
The present work
IS
motivated by
the
need to investigate more
relIable and economical numerical methods for predlctmg wave
mduced dynamic responses of ocean platforms of complex geom
etry One such method proposed herein IS
the
hybrId mtegral
equation method involving the use of quadratic Isoparametnc
surface elements. To
deSCrIbe the
complexity of body geome
try and associated wave flows accurately, It appears adequate to
adopt higher-order elements (e g lInear or quadratic) To the
best of our knowledge, higher-order panels have never been used
m conjunction with the classical boundary integral formulatIon,
due to the difficulty in integrating Green s functIon and its graru
ents multiplied by the higher-order shape functions over each ele
ment The rufficulty may be overcome by introducing a free-space
Green s functIOn (Le. a Rankine source) instead of the complete
Green s function This hybrid integral-equation method is based
on combming a
duect
boundary element solutIOn of
the
fluid re
gIOn
close to the body wIth an eigenfunction representation of the
far field behaviour. The formulation based on a constant panel
IdealIsation has been gIven by Matsui, Kato and Shuai (1987),
and It
IS
extended herein to adopt quadratic isoparametric ele
ments. (In our expenence, the use of linear elements does not nec
essanly lead
to
the improvement of accuracy) Because of the
SIm
plICIty of the new Green s functIOn, no addItional rufficulty arises
m employmg hIgher-order elements. Following a brief review of
the mathematical formlliation, the validity ,and accuracy of the
proposed method are ,demons irated through several numerical
examples, mcluding
tbe
results for the ITTC semI-submersible
C0mpuison is made between our computed r,esults and existing
numerical solutions based on a direct boundary i ll.tegral (Garri
son, 1978) and hybrid finite element method (Yue, Chen and Mci.,
1978)
REVIEW
OF
HYBRID
INTEGRAL-
EQUATION METHOD
Governing Equations
ConSider the problem of diffraction and radiation of water waves
by a three-dimensional floating body. The body is oscillating si
nusoidally about a mean position in response to excitation by a
regular incident wave of frequency wand amplitude A. The Carte
sian coordinate system
oxyz
is defined as shown m Figure
1
with
the oxy-plane on the mean free surface and the oz-axis positive
, vertically upwards
With the assumption of ideal and irrotational flow, the wave field
at
time t may be defined by a velocity potential
(1)
The body motion may be represented as a linear superposition of
rigid-body modes, with complex amplitudes Xq q = 1 to 6). The
indices
q
= 1
to
6 correspond respectively to surge, sway, heave,
roll, pitch and yaw.
z
., -
/
I
r
( I
SF
X
I,
V
1 -.-._ ... I
1 - I - - - - IS . / I
IS
( )
--
- -V - - ii -S- - _
1
COSK:mh
-
9)
In the above expressions, H ~ I ) is the Hankel function of the first
kind of order
n, Kn
is
the
modified Bessel function of the second
kind of order
n,
and
m
are
the
positive real roots of the equat ion
10)
By applying Green s second identity to the inner fluid region V,
and making use of equations (3b-d) and the continuity require
ments
11)
on SR, the boundary-value problem for q is reduced to the inte
gral equation
Cpq P)
+
II
q Q)-aa
R
dS Q)
JJsus
B
nQ PQ
+ ffs
q Q)
[ a ~ (R:Q)
-
II(R:
Q
] dS Q)
+ ffs
R
; Q) (R:Q)
-
~ ~ ; Q ) R : J ] dS Q)
= is hq Q)
(R:
Q
) dS Q) 12)
where
P
and
Q
designate the reference and integration points on
the boundary surfaces av enclosing V aV = SU
SB
USF U
SR),
273
R
pQ
denotes the distance between the two points, dS Q is a dif
ferential area on av, C
p
is the solid angle enclosed by av
at
the
point P, and SB, SF are the portions of
bottom
and free surface
bounded by SR. Subscript Q on n designates that the normal
denvative is to be evaluated
at the
point
Q.
iscretisation
Scheme
Using Quadratic
Isoparametric
Elements
To
solve the integral equation (12) numerIcally, the boundary sur
faces
S,
SB and SF are discretised respectively into NJ, N2 and N3
quadrilateral isoparametric elements shown
in
Figure 2. The
el-
ement 60S, has nodes p, /)
(J
= 1 to 8) at its corner and mid.
side points, whose coordinates are x ~ / ) ,
y; ),
z;/).
All the
nodes
on the whole boundaries are numbered in sequence, such
that
P,(a = 1 to N
J
) is the a-th node with the coordinates (x y,-,z,),
where NJ is the total number of nodes. The potential
q
at the
arbitrary point
Q
within the element
60S,
can be approximated
by
8
q{Q)
=
LM, Q)q{P,CI)
(13)
=1
where M, are the shape functions interpolating q quadratically
between the nodal values. The boundary surfaces may also be
approximated by piecewisely quadratic curved surfaces, such
that
8
XQ
=
M , ( Q ) x ~ )
=1
8
YQ =
L
M, Q)y;/)
=1
8
ZQ
=L
M, Q)z;/)
3=1
where (xQ, YQ, zQ) denote the coordinates of the point Q.
(14)
By
s u b s t i t ~ t i n g
equations (13) and (14) into equation (12) which
is satisfied at the node
P
and truncating
the
double series of
eigenfunctions in equation (7)
at
n
=
Nand m
= M, the
integral
equation (12) is replaced by NJ algebraic equations of the form
FIgure 2 A quadrilateral isoparametric element with 8 nodes
-
7/25/2019 ISOPE-P-90-092
4/8
N M
L L
F.mnCY
mn
+ G.
mn/3mn)
n Om O
N
8
=
'
B(I) h p l)
L...J tJ ,
1=1;=1
(15)
where =
Nl+N2
and =
N ~ N 3 .
The influence coefficients
A ~ ~ ,
B ; ~ ) ,
F.mn and G.
mn
in equation (15) are given by
(16)
(17)
( ) =
f s J a ~ Q R;,Q)
-bmn R;,Q)] Zm(zQ) ( ) ndS
(18)
where
1
Rp,Q
=
[(x.
-
XQ)2
+
Y.
-
YQ)2
+(Z.
-
ZQ?]
e . = t a n - l ~ : ) ,
= t a n - l ~ : )
(19)
1
k H ~ I ) I k r o )
m
=
0
H ~ I ) k r o ) ,
b
mn
=
K : m K ~ K : m r o ) ,
m> 1
Kn K:mro) -
(20)
and
C. is
the solid angle enclosed by the boundary surface at the
node p,. For a smooth boundary
C. IS
27l', otherwise it can be
a,pq .
h
evaluated from the requirement
that
- = 0 when t e poten
an
tJals distrIbute uniformly over the whole boundaries.
Unknown variables involved in equation (15) are N
J
potentials
and NR = M + 1) 2N +
1)
coefficients CY
mn
, /3mn. In order
that
the number of equations becomes equal to the number of un
knowns, N
R
additional control points must be placed on S
R
to
satisfy
8 N; 8
L L
A ~ ~ ) , p q ~ I ) +
L
L A ~ ~ ) - / l B ~ ) , p q p ; I )
1=1
;=1
I = N ~ 1 J=1
N M
L L
F.mnCY
mn
+G.
mn/3mn)
n Om O
N,
8
=
'
B(I)h
p l)
L . L J J
1=1
J=1
where
(22)
The integrals in equations (16) and (17) may be evaluated by
numerical quadrature
(e
g a four point Gaussian quadrature)
274
when p. is not on the element
/),.S,.
However, when P, coincides
with one ofthe nodes on /) S say ~ I ) , numerical quadrature may
not be used b.ecause of the singular behaviour of the integrands
as
Rp,Q
-->
0,
and analytical treatment is reqUired
to
evaluate these
singular integrals. I t can be shown
that, for
flat elements,
A ~ ~ )
IS
zero due to the orthogonality of
Rp,Q
and ii For sufficiently
small elements where the curvature effect is negligible, one may
therefore assume
that
(23)
To evaluate
B ~ ) , it is
convenient to rewrite equation (17) in the
form
(24)
where
(25)
For sufficiently small elements, the mtegral of equation (25) may
be evaluated explicitly, yielding
B ~ ) =
t l,
sin
/3
log (
t } l .)
=1
tan 2 tan 2
(26)
where
l
/3 are as defined in Figure
3,
and K takes the value
2 and 3 for the corner and mid-side nodes respectively. Since the
integral involved in equation (24) is regular everywhere, this may
be evaluated by numerical quadrature.
The evaluation of F.mn and G.
mn
requires more careful consid
eration because of the oscillatory behaviour of the integrands,
part icularly when m is large. For these evaluations,
it
is
conve
nient to use the Fourier series expansion of the Rankme source.
By substituting this mto equation (18) and integrating explic
itly with respect to the azimuthal angle e, the surface integral
over SR in equation (18) is reduced to a line integral, which may
be then evaluated numerically. For full details, see Matsui, Kato
and Shirai (1987). Solution of equations (15) and (21) leads to
the numerical approximations
to
the diffraction and radiation po
tentials.
P,
(a)
(b)
Figure 3 Definitions of
l /3
and
{ for
(a) corner nodes,
(b) mid-side nodes
-
7/25/2019 ISOPE-P-90-092
5/8
NUMERICAL EXAMPLES
Several numerical examples have been studied t o illustra te the va-
hdity and accuracy of our hybrid integral-equatIOn method Both
constant and quadratic isoparametric element idealisations were
adopted and compared with each other as well as with existing
numerical solutions based on a direct boundary integral (Gar
nson, 1978) and hybrid finite element formulations (Yue, Chen
and Mei, 1978). In the remainder of this section, the abbrevia
hons H.LE.M., D.B.I
M.
and H.F.E.M are used respectively to
stand for the hybrid integral-equation method, direct boundary
Integral method and hybrid finite element method. A constant
and quadratic isoparametric element are referred to
as
C.E and
Q.E. respectively.
ircular Dock
The first example studied is a circular dock in shallow water,
for which exact analytical solutions have been obtained by Gar
ret (1971). The dock analysed here has a radius a and a draft
D =
0 5a in water of depth
h =
0
75a
Due to the double sym
metry of the geometry, only one quadrant of the fluid region
bounded by the fictitious cylinder of radius
1 25a
has been anal
ysed with boundary element idealisations shown in Figure 4 and
Table
1,
and the far field eigenfunction representation truncated
at N
=
5 and M
=
4, which was sufficient to ensure the conver
gence of the solution. Our computed results for the wave exciting
moment are compared with the analytical solutions in Figure 5
Also included
In
this comparison are results obtained by Yuen
and Chau (1987), using H.LE.M. (C E.)
I t is
clearly seen
that
H.I E
M. Q.E)
provides much closer results to the analytical
predictions than H.LE.M. (C.E.), confirming the high accuracy
of the H.LE.M. formulation based on Q E. iqealisations. Fur
thermore, our H.I.E
M.
(C E ) results are seen
i
a.
-
):
L :
a:
' -
~ - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
0
N
"'
D. B. . M. -c. E.-
-[ ] -
- )-
-* -
H.1.E.M.-C.E.
H.1.E.M.-Q.E.
H.F.E.M.-Q.E.
EXPERIMENT
04- - - - - . - - - - . - - - - , - - - - - r - - - - . - - - - , - - - - - , - - - - i
C().8
1 6
2 4
3 2
4 0
T
( s e c )
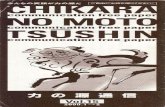
Figure 8 Added mass in heave for the semi-submersible
normalised with displacement
P V)
~ - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
o
'
D.B.1.M.-C.E.-
-[ ] - H.1.E.M.-C.E.-
- )-
H. .E.M.-Q.E.-
-*- H.F.E.M.-Q.E.- _--
XP RIM NT / ,,/'
,,/
L
, , / , , /
0 4 - - - ~ r - - - - r - - - - . - - - _ , ~ - - _ r - - - - , - - - _ , - - - - ~
C().8 1 6
2 4
3 2
T ( s e c )
Figure 9 Surge amplitude of the semi-submersible in
head
waves
normalised with wave amplitude
A
4 0
277
CPU times were obtained on the FACOM M780/20 and VP-
200 at
Nagoya UniversIty Computation Center.
It
is evident
that
H.LE.M. offers a considerable saving of computer time over
D.B I.M. and H.F.E.M., especially when a wide range of frequen
cies must be studied.
a:
' -
x
a:
' -
x
o
N
Table 4 Comparison of CPU times
Method To(s)
TF(S)
DBIM CE)* 0.05 72.2
HIEM CE)* 36.4
19.1
HIEM QE)* 32.8 14.6
HFEM QE)** 0.15 56.7
-[ ]-
- ) -
-* -
O.B. .M.-C.E.
H. .E.M.-C.E.
H. .E.M.-Q.E.
H.F. E. M.
-Q.E.
EXPERIMENT
0 4 - - S ~ r - - - - r - - - - . - - - _ , - - - - _ r - - ~ , - - - _ , - - - - ~
C().8
o
N
1 6
2 4
3 2
T ( s e c )
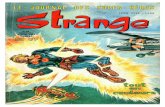
a) Potential
flow
theory
D. B. .
M.
-C. E.-
-[ ] -
H. .E.M.-C.E.-
- )-
H. .E.M.-Q.E.-
l I
H.F.E.M.-Q.E.-
EXPERIMENT
r
,
I \
I
I \
I
I
I
I
I
I
I
I
I
I
I
4 0
0 4 - - m ~ . - - - - r - - - - . - - - ~ r - - - _ r - - - - - - - _ - - - - ~
C().8
1 6
2 4
3 2
T
( s e c )
b) With viscous correction A=0.023 m)
Figure
10
Heave ampli tude of the semi-submersible
in bow quartering waves normalised with
A
4 0
-
7/25/2019 ISOPE-P-90-092
8/8
a:
-'
...
x
O.B.
I .H.-C.E.-
-[ ] -
H. I .E.H.-C.E.-
- ) -
H.I .E.M. Q.E.
H.F.E.M. Q.E.
0
EXPERIMENT
'
a
o
91.8
1.6
2.4
3 .2
4.0
T [sec]
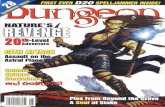
Figure
11
Roll amplitude of the semi-submersible in beam
waves (normahsed with dimensionless wave number
kA
D.S I .M. C.E.
[CJ H. I .E.M. C.E.
- )-
H.I .E.M. O.E.
- -
H.F.E.M. O.E.
EXPERIMENT
x
a
1.6 2.4 3 .2
4.0
T
[sec]
Figure 12 Yaw amplitude of the sew-submersible m bow
quartering waves (normalised
With
kA
CONCLUSION
ThiS
work
was
motivated by the need to mvestIgate reliable and
economical numerical methods for predicting wave-induced dy
namic responses of ocean platforms of complex geometry One
such method proposed herem
S
the hybrid mtegral-equatlOn
method involving the use of quadrattc Isoparametric surface ele
ments The validity and accuracy of the proposed method were
confirmed by companng computed results With the analytical
so-
lution for the circular dock and the model test results for the
ITTC serm-submerslble Comparison of our results With eXlstmg
numencal solutions mdIcated that the use of quadratiC isopara
metrIC elements led to sigmficant Improvement of the accuracy
and effiCiency of the hybrId mtegral-equatlOn method, compared
278
with classical boundary integral approaches based on constant
element Ideahsations.
CKNOWLEDGEMENT
The
authors are grateful to Mr. Kimitoshl Sano of Nagoya
Uni-
versity for his careful typing ,of this manuscript.
REFERENCES
DnV (1981), Rules Classification of Mobile Offshore Units.
Eatock Taylor, R. and Jefferys, E.R. (1986), Variabili ty of Hy-
drodynamic Load Predictions for a Tension
Leg
Platform,
Ocean
Engineering
Vol
13, No.5, pp.449-490.
Garret,
C.J
R.
(1971), Wave Forces on a Circular Dock, Jour
nal of
Fluid Mechanics
Vol
46, Part 1
pp.129-139.
Garrison, C J. (1978), Hydrodynamic Loading of Large Off-
shore Structures Three-Dimensional Source Distribution
Methods, in
Numerical Methods in Offshore Engineering
Zlenkiewlcz, 0 C. et
al
eds), Wiley, Chichester, Ch.3,
pp.87-140.
Jefferys, J R (1987), Numerical Problems of First Order
DiffractIOn Theory, Second InternatJOnal Workshop on Wa-
ter Waves
and
Floating Bodles
Report
No.
AM-87-06, Um-
verslty of Bristol
Korsmeyer, FT., Lee, C
-H,
Newman, J Nand Sclavounos,
P D (1988), The Analysis of Wave Effects on Tension
Leg Platforms, Proceedings
of
the Seventh International
Conference
on
Offshore Mechanics
and
Arctic Engineering
ASME,
Vol
2, Houston, Texas, pp 1-14.
MatsUl, T., Kato,
K.
and Shirai, T (1987), A Hybrid Integral
EquatIOn Method for Diffraction and Radiation of Water
Waves by Three-Dimensional Bodies,
ComputatJOnal
Me-
chanlCs
Vol.2, pp.119-135.
Takagi, M , Arai, S., Takezawa, S , Tanaka, K and Takarada, N.
(1985), A Comparison of Methods for CalculatIng the
Mo-
hon
of a Semi-SubmefSlble,
Ocean EngineerIng
Vol
12,
No 1, pp 45-97.
Yue,
D K P, Chen, H.S. and Mel, C C (1978), A Hybrid El
ement Method for Diffraction of Water Waves by Three
Dimensional Bodies, InternatJOnal Journal
or
Numerical
Methods
In
EngineerIng
Vol
12,
pp 245-266.
Yuen, M M F and Chau, F P (1987),
A
HybrId Integral Equa
tIon Method for Wave Forces on Three-DimenSIOnal Off-
shore Structures,
Journal
of
Offshore MechanICS
and
Arc-
tic EngIneenng
TransactJOns of
the
ASME Vol 109,
No
3,
pp.229-236