
isma2012_0520
14
Identification and verification of structural nonlinearities based on vibration tests G.B. Zhang, C. Zang College of Energy and Power Engineering, Nanjing University of Aeronautics and Astronautics Nanjing, 210016, China e-mail: [email protected] Abstract Practical engineering structures often exhibit nonlinear dynamic behaviour. It is essential to construct an accurate nonlinear model from measured vibration data in order to predict the nonlinear dynamic characteristics and response of these structures. This paper develops a novel technique to identify structural nonlinearity and verify the nonlinear model. The method consists of two dynamic tests which are constant-amplitude displacement test and constant-amplitude velocity test. Both tests use special sinusoidal force excitations. The constant-amplitude displacement test is used to measure the nonlinear stiffness behaviour and identify nonlinear stiffness terms from measured FRFs of the structure subjected to sinusoidal force excitations which need to ensure the amplitudes of displacement is constant through adjusting the amplitude of the force over the frequency range. The constant-amplitude velocity test is similar to the constant-amplitude displacement and used to measure the nonlinear damping behaviour and identify nonlinear damping terms. The identified nonlinear stiffness and damping terms are included into the nonlinear model. The verification is done through comparison between predicted nonlinear behaviour from the nonlinear model with measured nonlinear behaviour. This solution, taking advantage of modal test and equivalent linearization theory, is direct and accurate. The solution is illustrated and verified through a framed structure with bolted joints. 1 Introduction In the dynamic model validation, high quality model can be obtained through establishing detailed finite element model and further model updating using modal testing data. The updated model can be applied to predict and analyze the dynamic response of the structure sufficiently and accurately within the interested frequency range. Generally, most validation methods are based on linear system. The structural nonlinearities, due to the difficulty to obtain accurate nonlinear parameters in the measurement, are often ignored completely or considered as uncertain factors to deal with [1-4]. Worden [5] and Kershen [6] comprehensively discussed nonlinear detection, localization and identification in structural dynamics, but there still exist difficulties in nonlinear parameter identification suitable for engineering application with standard vibration test because of the advantages and disadvantages of each method. Recently, sinusoidal excitation and modal analysis techniques [7-9] have been developed for the nonlinear identification. The method, based on the equivalent linearization theory [5], is expected to be applied widely in industry because of its mathematical simplicity and relatively mature technique. Most recently, Zang, Schwingshackl & Ewins [10] put forward an effective linearity method to deal with the existed nonlinearity in an approach to the Sandia Structural Dynamics Challenge for model validation of structural dynamic analysis. They[11] also investigated the influence of nonlinearity on uncertainty and variability for dynamic models. Based on simulation of three degrees of freedom vibration system with a weakly nonlinearity, two dynamic tests, namely constant-amplitude displacement test and constant- amplitude velocity test, are exploited to identify the nonlinear stiffness and damping behaviour respectively under the sinusoidal force excitations. 2611
-
Upload
dialauchenna -
Category
Documents
-
view
4 -
download
1
description
wed
Transcript of isma2012_0520

Identification and verification of structural nonlinearities based on vibration tests
G.B. Zhang, C. Zang
College of Energy and Power Engineering, Nanjing University of Aeronautics and Astronautics
Nanjing, 210016, China
e-mail: [email protected]
Abstract Practical engineering structures often exhibit nonlinear dynamic behaviour. It is essential to construct an
accurate nonlinear model from measured vibration data in order to predict the nonlinear dynamic
characteristics and response of these structures. This paper develops a novel technique to identify
structural nonlinearity and verify the nonlinear model. The method consists of two dynamic tests which
are constant-amplitude displacement test and constant-amplitude velocity test. Both tests use special
sinusoidal force excitations. The constant-amplitude displacement test is used to measure the nonlinear
stiffness behaviour and identify nonlinear stiffness terms from measured FRFs of the structure subjected to
sinusoidal force excitations which need to ensure the amplitudes of displacement is constant through
adjusting the amplitude of the force over the frequency range. The constant-amplitude velocity test is
similar to the constant-amplitude displacement and used to measure the nonlinear damping behaviour and
identify nonlinear damping terms. The identified nonlinear stiffness and damping terms are included into
the nonlinear model. The verification is done through comparison between predicted nonlinear behaviour
from the nonlinear model with measured nonlinear behaviour. This solution, taking advantage of modal
test and equivalent linearization theory, is direct and accurate. The solution is illustrated and verified
through a framed structure with bolted joints.
1 Introduction
In the dynamic model validation, high quality model can be obtained through establishing detailed finite
element model and further model updating using modal testing data. The updated model can be applied to
predict and analyze the dynamic response of the structure sufficiently and accurately within the interested
frequency range. Generally, most validation methods are based on linear system. The structural
nonlinearities, due to the difficulty to obtain accurate nonlinear parameters in the measurement, are often
ignored completely or considered as uncertain factors to deal with [1-4]. Worden [5] and Kershen [6]
comprehensively discussed nonlinear detection, localization and identification in structural dynamics, but
there still exist difficulties in nonlinear parameter identification suitable for engineering application with
standard vibration test because of the advantages and disadvantages of each method. Recently, sinusoidal
excitation and modal analysis techniques [7-9] have been developed for the nonlinear identification. The
method, based on the equivalent linearization theory [5], is expected to be applied widely in industry
because of its mathematical simplicity and relatively mature technique.
Most recently, Zang, Schwingshackl & Ewins [10] put forward an effective linearity method to deal with
the existed nonlinearity in an approach to the Sandia Structural Dynamics Challenge for model validation
of structural dynamic analysis. They[11] also investigated the influence of nonlinearity on uncertainty and
variability for dynamic models. Based on simulation of three degrees of freedom vibration system with a
weakly nonlinearity, two dynamic tests, namely constant-amplitude displacement test and constant-
amplitude velocity test, are exploited to identify the nonlinear stiffness and damping behaviour
respectively under the sinusoidal force excitations.
2611

This paper will focus on the nonlinearity identification with practical modal test. A framed structure with
bolted joints is used as an example. The constant-amplitude displacement test is used to measure the
nonlinear stiffness behaviour and identify nonlinear stiffness terms from measured FRFs of the structure
subjected to sinusoidal force excitations which need to ensure the amplitudes of displacement is constant
through adjusting the amplitude of the force over the frequency range. Similarly, the nonlinear damping
features and term can be identified through the constant-amplitude velocity test. The verification is
undertaken through comparison between the predicted nonlinear behaviour from the nonlinear model with
the measurement. The results show the effectiveness of the proposed method.
2 Identification of structural nonlinearity
2.1 Equivalent linearization of structural nonlinearity
In the case of a SDOF nonlinear system where the nonlinearity is additively separable, the equation of
motion can be written as:
sind smx f x f x F t (1)
Where df x represents the weak nonlinearity of damping behavior and sf x represents the weakly
nonlinear stiffness feature. Based on equivalent linearization theory, its equivalent linearization is written
as:
sineq eqmx c x k x F t (2)
where eqc is the equivalent linear damping and
eqk is the equivalent linear stiffness. Then, the equivalent
linear FRF is described as:
2
1eq
eq eq
Hm j c k
(3)
Simply assuming that the response to a sinusoidal excitation is a sinusoid at the same frequency, the
displacement and velocity can be expressed as
sinx A t (4)
sin2
x A t
(5)
where A is the amplitude of displacement response at steady state.
The harmonic balance (HB) applied to the equation of motion yields the equivalent stiffness
2
0
1sin sin deq sk f A f A
A
(6)
and the equivalent damping
2
0
1sin cos d ( )eq dc f A g A
A
(7)
According to Eq. (6) and Eq. (7), the equivalent stiffness is the function of displacement amplitude and the
equivalent damping is the function of velocity amplitude, respectively. Therefore, if the amplitudes of
displacement are kept constant through adjusting the amplitude of the sinusoidal force over the interested
frequency range, the influence of the nonlinear stiffness on the measured FRF data can be minimised.
Such test is called as constant displacement test and can be used to measure the relationship between
equivalent stiffness and displacement amplitude. The nonlinear damping behaviour and terms can be also
2612 PROCEEDINGS OF ISMA2012-USD2012

obtained in the same way through acting on the constant velocity test to the structure. Afterwards, the
identified nonlinear properties can be included into the model to predict the response of nonlinear system.
2.2 Dynamic test methods
There are three dynamic test methods using the sinusoidal excitation with amplitude control: constant
force test, constant displacement test, and constant velocity test. The most widely used constant force test
needs to keep the sinusoidal excitation force amplitude constant at various interested frequency points
over the frequency range during the test. The constant displacement and constant velocity tests need to
adjust the amplitude of sinusoidal force in order to keep the displacement or velocity response amplitude
unchanged during the frequency range of excitation. The difficulty in conducting constant displacement
and constant velocity tests are how to determine the amplitude of sinusoidal excitation at each frequency
so that the response amplitudes at the steady state are maintained the same value. Generally, the feedback
control method is effective, but it is time-consuming. Here, a simple method is employed without
feedback control. As the relationship between the sinusoidal excitation and response amplitudes is affected
by nonlinearity at various frequencies, it is generally not linear but remains a monotonic increasing. This
may be true for many nonlinear structures. Therefore, the function can be measured at each interested
frequency, such as
( , ), 1,2,...iX f F i n (8)
1( , ), 1,2,...iF f X i n (9)
So, the response amplitude can be only determined by a given excitation amplitude for a frequency in zero
initial conditions
0( ), , 1,2,...ix f F Freq f i n (10)
If this function has been gained from test data, the excitation amplitude can be only determined by a given
response amplitude
1
0 ( ), , 1,2,...iF f x Freq f i n (11)
In practice, the function can be created by the piecewise spline interpolation polynomial, and will be
further verified in the subsequent experimental research.
Actually, the phase difference between excitation and response is, similar to the amplitude in the zero
initial conditions, a monotonic increasing or decreasing function. Therefore, the excitation amplitude and
phase difference between excitation and response can alternatively be determined by a given response
amplitude using the data from constant force test. Therefore, the FRFs can also be determined. As a result,
the constant-amplitude displacement and constant-amplitude velocity tests can be conducted virtually
from constant force excitation.
3 Experimental study of a framed structure with bolted joints
3.1 Experimental setup
In order to illustrate and verify the nonlinear parameters identification method, a series of tests has been
conducted in a framed structure with bolted joints shown in Figure 1. This structure was originally
intended to represent a 3DOF system and can represent a SDOF system after removing two mass
components. Four rubber rings are installed between the four aluminum beams and the base plate
respectively to enhance the nonlinear stiffness and damping behavior of the SDOF system.
NON-LINEARITIES: IDENTIFICATION AND MODELLING 2613

(a) SDOF system
(b) 3DOF system
Figure 1: Experimental setup
3.2 Nonlinearity detection using swept sine test
To detect the nonlinearity of the SDOF system, a series of swept sinusoidal excitation with various force
levels from 0.1N to 10N are exploited to the frame and the responses of acceleration are measured.
Obviously, the overlay of measured FRFs from Figure 2 shows the distortion characteristic of acceleration
FRFs. With the increase of excitation force levels, the resonant frequency shifts downwards to the
softening system. The zoomed changes in natural frequency and phase between 36Hz and 48Hz are
overlaid in Figure 3. The modal parameters extracted from FRFs using circle fit method from ICATS
software are shown in Figure 4.
20 30 40 50 60 70-100
-80
-60
-40
-20
0
20
Frequency / Hz
Am
plit
ude / g
/N,d
B
0.1N
0.5N
1N
3N
5N
7N
10N
Figure 2: The acceleration FRFs at different force levels
36 38 40 42 44 46 48-50
-40
-30
-20
-10
0
10
Frequency / Hz
Am
plit
ude / g/N
,dB
0.1N
0.5N
1N
3N
5N
7N
10N
36 38 40 42 44 46 480
50
100
150
200
Frequency / Hz
Phase / d
eg
0.1N
0.5N
1N
3N
5N
7N
10N
Figure 3: The acceleration FRFs at different force levels between 36Hz and 48Hz
2614 PROCEEDINGS OF ISMA2012-USD2012

0 2 4 6 8 1042
42.5
43
43.5
44
44.5
45
Amplitude / N
Natu
ral fr
equency / H
z
0 2 4 6 8 10
1.8
2
2.2
2.4
2.6
2.8
3
3.2
Amplitude / N
Vis
cous d
am
pin
g r
atio
/ %
Figure 4: The modal parameters at different force levels of excitation
It can be seen that the natural frequency shifts from 44.8Hz to 42.4Hz and the viscous damping ratio shifts
from 1.8% to 5.6% respectively, while the excitation force is raised from 0.1N to 10N. Strictly speaking, it
is not suitable to estimate the modal parameters for nonlinear system directly using traditional modal
analysis method such as the circle fit method. The fitting error will be produced because of the Nyquist
plot distortion as shown in Figure 5. Therefore, it is difficult to identify nonlinear parameters accurately
using the swept sine test directly.
(a) 10N
(b) 0.1N
Figure 5: Circle fit at different force levels of excitation
3.3 Constant force test
The parameter setting of the sinusoidal excitation used to conduct constant force test is shown in Table 1.
The accelerance FRFs obtained from constant force test and their amplitudes and phases against frequency
are plotted and shown in Figure 6 and Figure 7. The relationship of both amplitude acceleration and phase
against the force respectively at different frequencies is plotted in Figure 8. A monotonic increasing
function between amplitude and force can be seen clearly while the phase shows the decreasing function
instead.
Frequency span Frequency interval Force levels Sampling Freq Sampling time
40 Hz~47Hz 0.25Hz 0.5,1,2,3,4,5,7,9N 5120Hz 1.6s
Table 1: The parameter setting for constant force test
NON-LINEARITIES: IDENTIFICATION AND MODELLING 2615

Figure 6: The 3D plot of amplitude of accelerance FRFs
Figure 7: The 3D plot of phase of accelerance FRFs
1 2 3 4 5 6 7 8 9
1
2
3
4
5
6
7
Force / N
Accele
ration / g
40 Hz
41 Hz
42 Hz
43 Hz
44 Hz
45 Hz
46 Hz
47 Hz
1 2 3 4 5 6 7 8 9
20
40
60
80
100
120
140
160
Force / N
Phase / d
eg
40 Hz
41 Hz
42 Hz
43 Hz
44 Hz
45 Hz
46 Hz
47 Hz
Figure 8: The amplitude and phase of acceleration against excitation levels at different frequencies
2616 PROCEEDINGS OF ISMA2012-USD2012
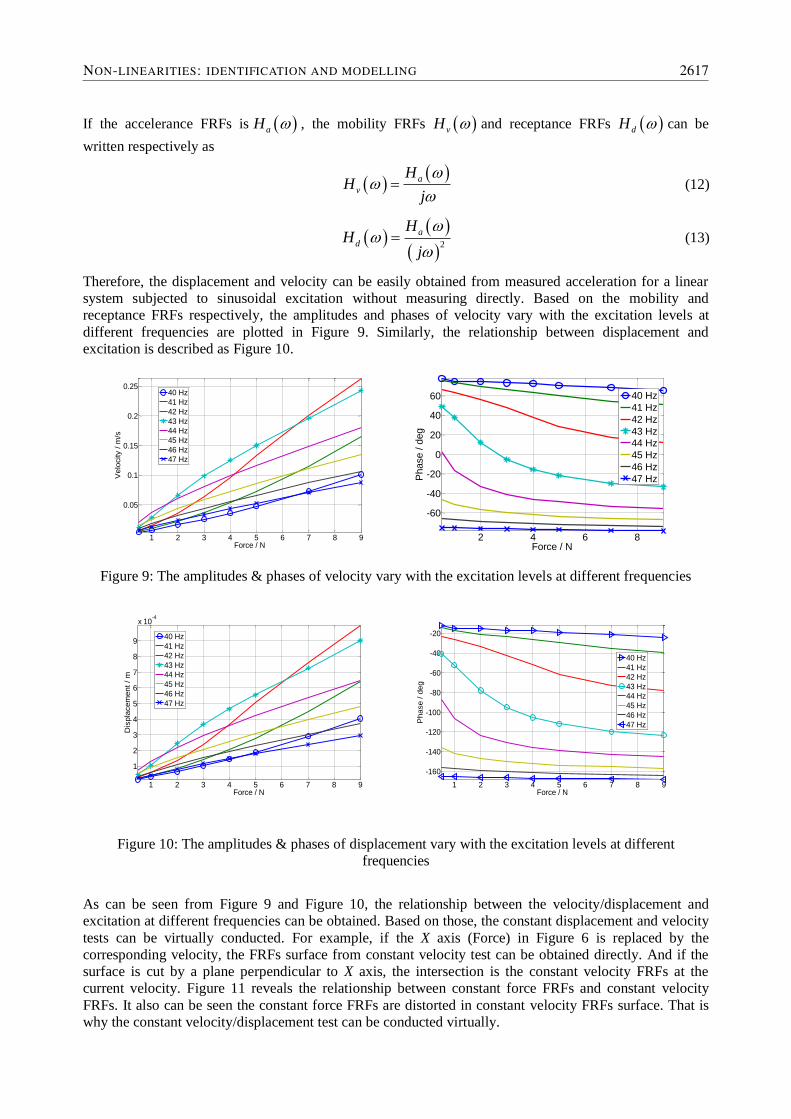
If the accelerance FRFs is aH , the mobility FRFs vH and receptance FRFs dH can be
written respectively as
a
v
HH
j
(12)
2
a
d
HH
j
(13)
Therefore, the displacement and velocity can be easily obtained from measured acceleration for a linear
system subjected to sinusoidal excitation without measuring directly. Based on the mobility and
receptance FRFs respectively, the amplitudes and phases of velocity vary with the excitation levels at
different frequencies are plotted in Figure 9. Similarly, the relationship between displacement and
excitation is described as Figure 10.
1 2 3 4 5 6 7 8 9
0.05
0.1
0.15
0.2
0.25
Force / N
Velo
city / m
/s
40 Hz
41 Hz
42 Hz
43 Hz
44 Hz
45 Hz
46 Hz
47 Hz
2 4 6 8
-60
-40
-20
0
20
40
60
Force / N
Phase / d
eg
40 Hz
41 Hz
42 Hz
43 Hz
44 Hz
45 Hz
46 Hz
47 Hz
Figure 9: The amplitudes & phases of velocity vary with the excitation levels at different frequencies
1 2 3 4 5 6 7 8 9
1
2
3
4
5
6
7
8
9
x 10-4
Force / N
Dis
pla
cem
ent / m
40 Hz
41 Hz
42 Hz
43 Hz
44 Hz
45 Hz
46 Hz
47 Hz
1 2 3 4 5 6 7 8 9
-160
-140
-120
-100
-80
-60
-40
-20
Force / N
Phase / d
eg
40 Hz
41 Hz
42 Hz
43 Hz
44 Hz
45 Hz
46 Hz
47 Hz
Figure 10: The amplitudes & phases of displacement vary with the excitation levels at different
frequencies
As can be seen from Figure 9 and Figure 10, the relationship between the velocity/displacement and
excitation at different frequencies can be obtained. Based on those, the constant displacement and velocity
tests can be virtually conducted. For example, if the X axis (Force) in Figure 6 is replaced by the
corresponding velocity, the FRFs surface from constant velocity test can be obtained directly. And if the
surface is cut by a plane perpendicular to X axis, the intersection is the constant velocity FRFs at the
current velocity. Figure 11 reveals the relationship between constant force FRFs and constant velocity
FRFs. It also can be seen the constant force FRFs are distorted in constant velocity FRFs surface. That is
why the constant velocity/displacement test can be conducted virtually.
NON-LINEARITIES: IDENTIFICATION AND MODELLING 2617

Figure 11: Constant force FRFs and constant velocity FRFs
3.4 Nonlinearity identification
3.4.1 Nonlinear stiffness identification
The FRFs of the constant displacement tests under the different excitation levels are shown in Figure 12.
Suppose the equivalent stiffness is
m
eqk a b x (14)
40 41 42 43 44 45 46 47
-90
-88
-86
-84
-82
-80
-78
Frequency / Hz
Am
plit
ude / d
B,m
/N
D1
D2
D3
D4
D5
D6
D7
D8
D9
D10
(a) Amplitude
40 41 42 43 44 45 46 47
-160
-140
-120
-100
-80
-60
-40
-20
Frequency / Hz
Phase / d
eg
D1
D2
D3
D4
D5
D6
D7
D8
D9
D10
(b) Phase
Figure 12: Constant displacement FRFs with different excitations
The parameters a, b, and the index m can be identified by the least squire curve fitting method using the
data from Table 2 obtained through modal analysis. The fitting results are shown in Table 3.
2618 PROCEEDINGS OF ISMA2012-USD2012

No. Displacement
[10-3
m]
Equivalent Stiffness
[104m/N]
Natural Frequency
[Hz]
D1 0.0719 8.9595 43.9857
D2 0.1211 8.8508 43.7182
D3 0.1703 8.7613 43.4967
D4 0.2195 8.6883 43.3150
D5 0.2688 8.6272 43.1624
D6 0.3180 8.5749 43.0314
D7 0.3672 8.5272 42.9117
D8 0.4164 8.4831 42.8005
D9 0.4656 8.4440 42.7017
D10 0.5149 8.4106 42.6173
Table 2: Constant displacement test results
a b m
9.2719×104
-3.8641×105 1/2
Table 3: Curve fitting results
The curve fitting and the test of both natural frequencies and the equivalent stiffness against the
displacement amplitude respectively is plotted in Figure 13.
0 0.2 0.4 0.6 0.8 1
x 10-3
42
42.5
43
43.5
44
44.5
Displacement / m
Natu
ral fr
equency / H
z
Test
Fit
0 0.2 0.4 0.6 0.8 1
x 10-3
8.2
8.4
8.6
8.8
9
9.2
x 104
Displacement / m
Equiv
ale
nt stiffness / N
/m
Test
Fit
Figure 13: Curve fitting and the test of both natural frequencies and the equivalent stiffness against the
displacement amplitude
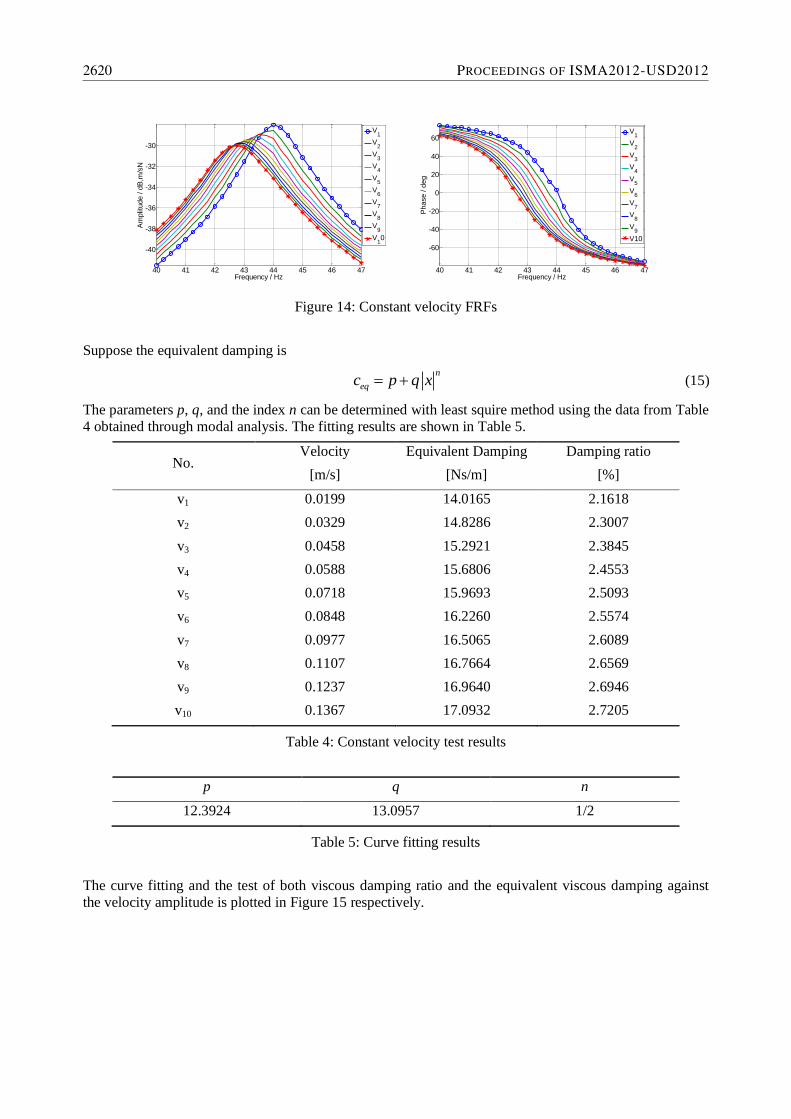
3.4.2 Nonlinear damping identification
Similar to the nonlinear stiffness identification, the amplitude and phase characteristics of Constant
velocity FRFs within the frequency range from 40 to 47Hz is plotted in Figure 14.
NON-LINEARITIES: IDENTIFICATION AND MODELLING 2619
40 41 42 43 44 45 46 47
-40
-38
-36
-34
-32
-30
Frequency / Hz
Am
plit
ude / d
B,m
/sN
V1
V2
V3
V4
V5
V6
V7
V8
V9
V10
40 41 42 43 44 45 46 47
-60
-40
-20
0
20
40
60
Frequency / Hz
Phase / d
eg
V1
V2
V3
V4
V5
V6
V7
V8
V9
V10
Figure 14: Constant velocity FRFs
Suppose the equivalent damping is
n
eqc p q x (15)
The parameters p, q, and the index n can be determined with least squire method using the data from Table
4 obtained through modal analysis. The fitting results are shown in Table 5.
No. Velocity
[m/s]
Equivalent Damping
[Ns/m]
Damping ratio
[%]
v1 0.0199 14.0165 2.1618
v2 0.0329 14.8286 2.3007
v3 0.0458 15.2921 2.3845
v4 0.0588 15.6806 2.4553
v5 0.0718 15.9693 2.5093
v6 0.0848 16.2260 2.5574
v7 0.0977 16.5065 2.6089
v8 0.1107 16.7664 2.6569
v9 0.1237 16.9640 2.6946
v10 0.1367 17.0932 2.7205
Table 4: Constant velocity test results
p q n
12.3924
13.0957 1/2
Table 5: Curve fitting results
The curve fitting and the test of both viscous damping ratio and the equivalent viscous damping against
the velocity amplitude is plotted in Figure 15 respectively.
2620 PROCEEDINGS OF ISMA2012-USD2012

0 0.05 0.1 0.15 0.2 0.25
2
2.2
2.4
2.6
2.8
3
Velocity / m/s
Vis
cous d
am
pin
g r
atio / %
Test
Fit
0 0.05 0.1 0.15 0.2 0.25
13
14
15
16
17
18
19
Velocity / m/s
Equiv
ale
nt vis
cous d
am
pin
g / N
s/m
Test
Fit
Figure 15: Curve fitting and the test of both the viscous damping ratio and the equivalent viscous damping
against the velocity amplitude
3.5 Verification of nonlinearity identification
Based on the nonlinearity identification of stiffness and damping property, the equation of motion of the
bolted frame can be written as
1 1
2 20 0 sinn nmx c x c x x k x k x x F t (16)
where the equivalent stiffness and damping are described as
1
20 0.9153eq nk k k x (17)
1
20 0.9153eq nc c c x (18)
Then, the stiffness and damping terms are
0
0
/ 0.9153
/ 0.9153
n
n
k a
k b
c p
c q
(19)
The results of parameter identification are shown in Table 6.
m ( kg ) 0k ( N/m ) nk ( N/m1.5
) 0c ( Ns/m ) nc ( Ns1.5
/m1.5
)
1.1730 9.2719×104 -4.2216×10
5 12.3924 14.3074
Table 6: The results of parameter Identification
In order to verify the identified nonlinear model, the comparison of acceleration responses under the
different excitation force levels is undertaken between the prediction of the nonlinear model and measured
nonlinear behaviour. The overlay of the responses is plotted in Figure 16. Obviously, the predicted
responses are closely matched with the measured responses. The amplitudes and phases characteristics of
FRFs are calculated from the prediction model and compared with the experimental measurement. The
overlay of the predicted and measured FRFs under the different excitation force levels are plotted in
Figure 17. It clearly shows that very good agreements between them are obtained. A slight difference in
the resonance zone may be due to the measurement error of excitation in the experimental test. Thus, the
identified nonlinear model can represent the actual nonlinear behaviour of the structure.
NON-LINEARITIES: IDENTIFICATION AND MODELLING 2621

40 41 42 43 44 45 46 47
1
2
3
4
5
Frequency /Hz
Acc
eler
atio
n /g
Test - 0.5N
Test - 3N
Test - 7N
Prediction - 0.5N
Prediction - 3N
Prediction - 7N
Figure 16: The overlay of acceleration responses between the model prediction and the measurement
40 41 42 43 44 45 46 47-14
-12
-10
-8
-6
-4
-2
0
Frequency /Hz
Am
plit
ude /dB
,g/N
Test - 0.5N
Test - 3N
Test - 7N
Prediction - 0.5N
Prediction - 3N
Prediction - 7N
40 41 42 43 44 45 46 47
20
40
60
80
100
120
140
160
Frequency /Hz
Phase /deg
Test - 0.5N
Test - 3N
Test - 7N
Prediction - 0.5N
Prediction - 3N
Prediction - 7N
Figure 17: The overlay of acceleration FRFs between the model prediction and the measurement
4 Conclusions
Nonlinearities are very common in real structures. In most cases, the functional types of nonlinearities are
unknown; therefore it becomes crucial to decide the nonlinear functional forms. The constant
displacement test and the constant velocity test under the ssinusoidal force excitations can be used to
identify the nonlinear stiffness and the nonlinear damping behaviours respectively from measured FRFs of
the structure. Both methods are mainly based on equivalent linearization theory and only considered the
first harmonic in the nonlinear identification. The experimental research based on a SDOF system with a
weakly nonlinear system shows the satisfactory results. Future work will extend to a MDOF system and a
FEM model, for example, the bolted joint beam etc.
Acknowledgements
The financial support of the National Natural Science Foundation of China (Project No. 51175244) and
Research Fund for the Doctoral Program of Higher Education of China (Project No. 20093218110008) are
gratefully acknowledged. Zang also acknowledges the project sponsored by the Scientific Research
Foundation for the Returned Overseas Chinese Scholars, State Education Ministry and the Fundamental
Research Funds for the Central Universities of China (Project No. kfjj20110204).
2622 PROCEEDINGS OF ISMA2012-USD2012

References
[1] R.G. Ghanem, A. Doostan and J. Red-Horse, A probabilistic construction of model validation,
Computer Methods in Applied Mechanics and Engineering, Vol.197 No.29-32 (2008), pp. 2585-2595.
[2] T. Hasselman and G. Lloyd, A top-down approach to calibration, validation, uncertainty
quantification and predictive accuracy assessment, Computer Methods in Applied Mechanics and
Engineering, Vol.197 No.29-32 (2008), pp. 2596-2606.
[3] L.G. Horta, et al., NASA Langley's approach to the Sandia's structural dynamics challenge problem,
Computer Methods in Applied Mechanics and Engineering, Vol.197 No.29-32 (2008), pp. 2607-2620.
[4] J. McFarland and S. Mahadevan, Error and variability characterization in structural dynamics
modeling, Computer Methods in Applied Mechanics and Engineering, 2008. 197(29-32), pp. 2621-
2631.
[5] K. Worden and G.R. Tomlinson, Nonlinearity in structural dynamics: detection, identification, and
modeling, 2001: Taylor & Francis.
[6] G. Kerschen et al., Past, present and future of nonlinear system identification in structural dynamics,
Mechanical Systems and Signal Processing, Vol.20 No.3 (2006), pp. 505-592.
[7] O. Arslan, M. Aykan and H. N Ozguven, Parametric identification of structural nonlinearities from
measured frequency response data, Mechanical Systems and Signal Processing, Vol.25 No.4 (2011),
pp. 1112-1125.
[8] O. Arslan, M. Aykan and H. N Ozguven, Modal identification of non-linear structures and the use of
modal model in structural dynamic analysis, in: 26th International Modal Analysis Conference
IMAC, Orlando, USA, 2008, Paper no.95.
[9] A. Carrella and D.J. Ewins, Identifying and quantifying structural nonlinearities in engineering
applications from measured frequency response functions, Mechanical Systems and Signal
Processing, Vol.25 No.3 (2011), pp. 1011-1027.
[10] C. Zang, C.W. Schwingshackl and D.J. Ewins, Model validation for structural dynamic analysis: An
approach to the Sandia Structural Dynamics Challenge, Computer Methods in Applied Mechanics
and Engineering, Vol.197,No 29-32,(2008), pp. 2645-2659.
[11] C.W. Schwingshackl, C. Zang and D. J. Ewins. The influence of nonlinearity on uncertainty and
variability for dynamic models, Proceedings of the 1st International Conference on Uncertainty in
Structural Dynamics. Sheffield, UK, May 2007, pp. 311-319.
NON-LINEARITIES: IDENTIFICATION AND MODELLING 2623

2624 PROCEEDINGS OF ISMA2012-USD2012


















