Introduction to SOAR Based on “a gentle introduction to soar: an Architecture for Human...
35
Introduction to SOAR Based on “a gentle introduction to soar: an Architecture for Human Cognition” by Jill Fain Lehman, John Laird, Paul Rosenbloom. Presented by Roman Ilin
-
Upload
marshall-lyons -
Category
Documents
-
view
223 -
download
5
Transcript of Introduction to SOAR Based on “a gentle introduction to soar: an Architecture for Human...

Introduction to SOAR
Based on “a gentle introduction to soar: an Architecture for Human Cognition” by Jill Fain
Lehman, John Laird, Paul Rosenbloom.Presented by
Roman Ilin

Unified Theories of Cognition
• 1980, Newell started the project
• Task: to find a set of computationally realizable mechanisms and structures that can answer all the questions about cognitive behavior

Architecture
• Analogy with computer hardware (fixed) – software (changeable)
• BEHAVIOR = ARCHITECTURE + CONTEXT• Architecture reflects designer’s assumptions about the
context.• In general, Architecture is a theory of what is common
among much of the behavior at the level above it.• Cognitive Architecture is a theory of the fixed
mechanisms and structures that underlie human cognition.
• SOAR is a cognitive architecture

What cognitive behaviors are common?
1. Goal oriented2. Reflects a rich, complex, detailed
environment3. Requires a large amount of knowledge4. Requires use if symbols and abstractions5. Flexible and a function of the
environment (real time)6. Requires learning from the environment
and experience

CONTEXT

CONTEXT
• BEHAVIOR = ARCHITECTURE + CONTEXT• CONTEXT is a theory about the knowledge the agent
has that contributes to the behavior
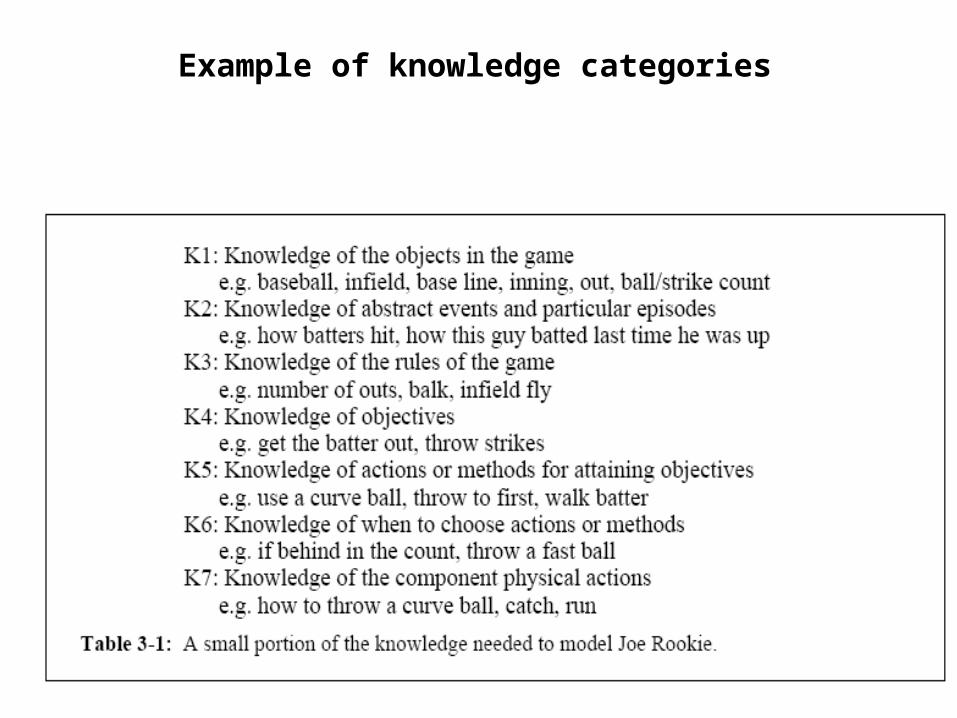
Example of knowledge categories

Behavior as Movement through Problem Spaces

Formalize problem space – goal, states and operators, and the principle of rationality
Connecting Content (knowledge) to Architecture
• Need Domain Independent Level of knowledge description
• It is “Goal Context” – a set of four (kinds of) things.
• {goals, problem spaces, states, operators}
• Knowledge is represented in terms of the above four things

Goal Context
Note, Single structure can be used for both “acting” and “thinking about acting”

Memory, Perception, action and Cognition
• Long Term Memory (LTM) – knowledge that is independent of the current goal
• Working Memory (WM) – current occurrence of some portion of that knowledge
• Decision Cycle – to tie LTM to WM

LTM – if – then statements
Decision Cycle – two phases
• Elaboration– Contents of WM are matched against the IF
parts of LTM
• Decision– Select of the suggested operators



What if decision cannot be made?
• Impasse results in switching the problem space
• SOAR defines fixed set of domain independent impasses.– Resolve tie impasse– Fail to decide impasse– …


Finding Solution using sub goal
• two more operators– Augment– Evaluate

Augment

Evaluation Operator


LEARNING, FINALLY• Practice improves what we do• Since behavior = architecture + content• And architecture is fixed• Content must change (learn)• Do it by adding new entries in LTM• Creates a “Chunk” by using parts of the environment
existing in pre-impasse environment that were used to achieve the result
• Chunking is deductive learning
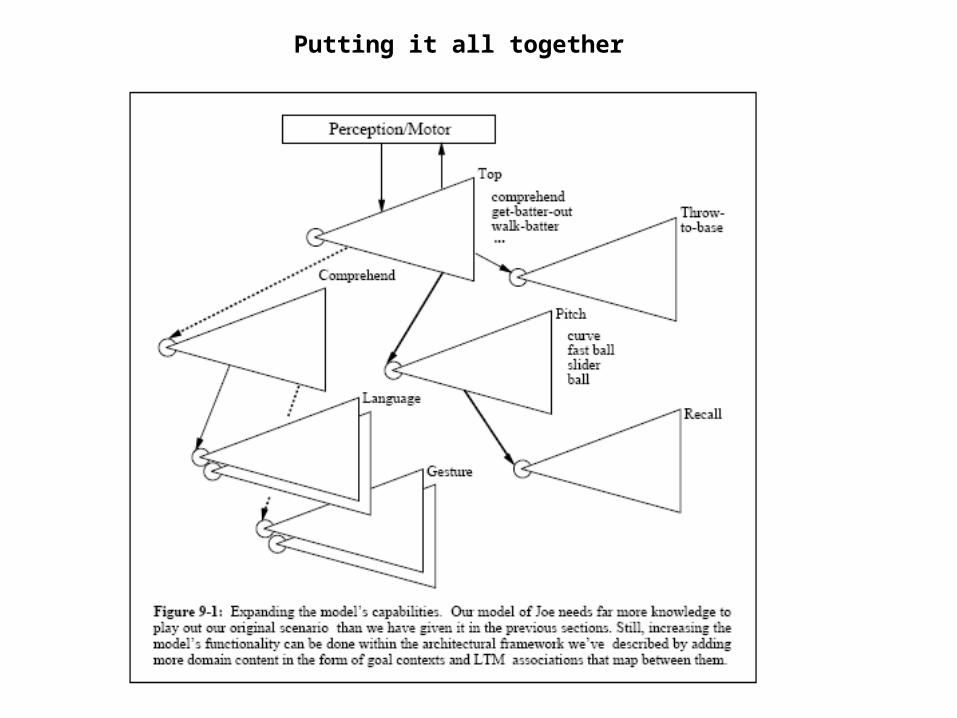
Putting it all together

ROBO SOAR: An Integration of external interaction, planning.
And learning using Soar.John . E. Laird, Eric. S. Yager, M.
Hucka, C. M. Tuck, 1991
Presented by Roman Ilin

THE ROBOT AND ITS TASKS

Capabilities
• Problem Solving with Incomplete Information
• Problem solving with delayed perception• Planning• Learning from external guidance• Interruption and reactivity• Improve efficiency• Improve correctness

System Architecture

Primitive Operators – commands sent to the robot controller (snap-in, snap-out not shown)

Initial Operators
• ALIGN-BLOCKS
• TURN-OUT-LIGHT
• Light has a preference
• Initially the operators will lead to impasses and learning.

Example of problem solvinggoals: align-blocks, align block-pair, puma-arm-
command

Guided Problem Solving – planning Idepth first guided search.

Guided Problem Solving – planning Ichunking
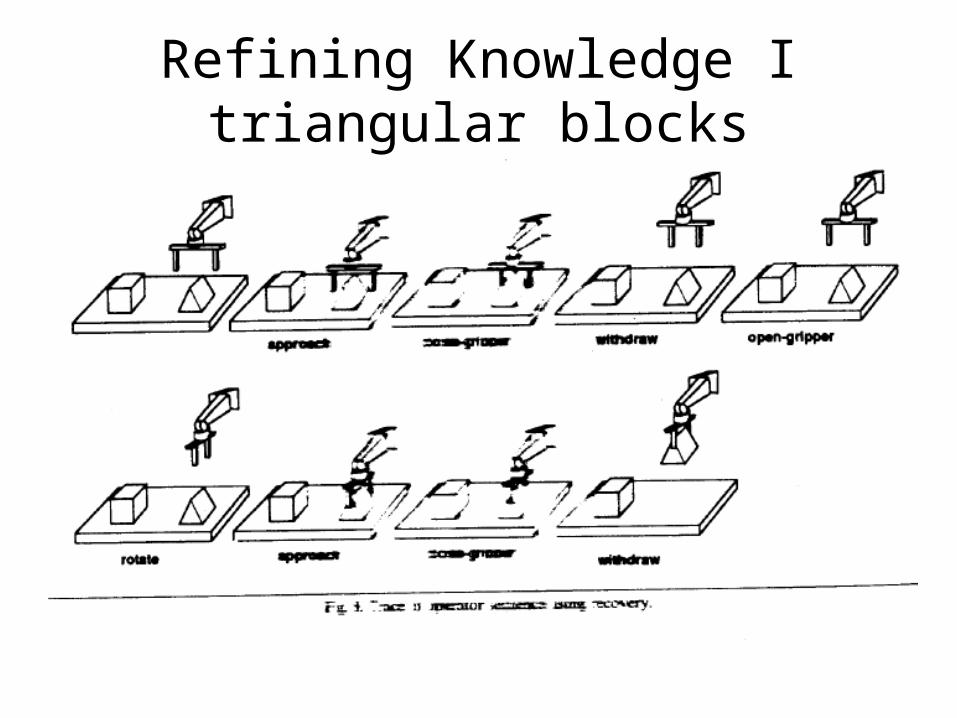
Refining Knowledge Itriangular blocks

Refining Knowledge IItriangular blocks