Introduction to Model Predictive Control (MPC)maapc/static/files/CACSD/... · 2017-05-15 ·...
200
Introduction to Model Predictive Control (MPC) Oscar Mauricio Agudelo Mañozca Computergestuurde regeltechniek Course : Bart De Moor ESAT - KU Leuven May 11th, 2017
Transcript of Introduction to Model Predictive Control (MPC)maapc/static/files/CACSD/... · 2017-05-15 ·...
Introduction to Model Predictive Control (MPC)
Oscar Mauricio Agudelo Mañozca
Computergestuurde regeltechniek
Course :
Bart De Moor
ESAT - KU Leuven
May 11th, 2017

Introduction to Model Predictive Control Course: Computergestuurde regeltechniek 2
Basic Concepts
Control method for handling input and state constraints within an optimal control setting.
It handles multivariable interactions
It handles input and state constraints
It can push the plants to their limits of performance.
It is easy to explain to operators and engineers
Principle of predictive control
1k 2k 3k
Prediction horizon
k Nk1k 2k
( )u k
( )y k
Prediction of ( )y k
Reference
FuturePast
measurement
ref y
2
ref( ), , ( 1)
1
min ( )N
u k u k Ni
y y k i
subject to
model of the process
input constraints
output / state constraints
Why to use MPC ?
time
Introduction to Model Predictive Control Course: Computergestuurde regeltechniek 3
Some applications of MPC
Control of synthesis section of a urea plant
MPC strategies have been used for stabilizing and maximizing the throughput of thesynthesis section of a urea plant, while satisfying all the process constraints.
Urea plant of Yara at Brunsbüttel (Germany), where a MPC control system has been set by IPCOS
Introduction to Model Predictive Control Course: Computergestuurde regeltechniek 4
Some applications of MPC
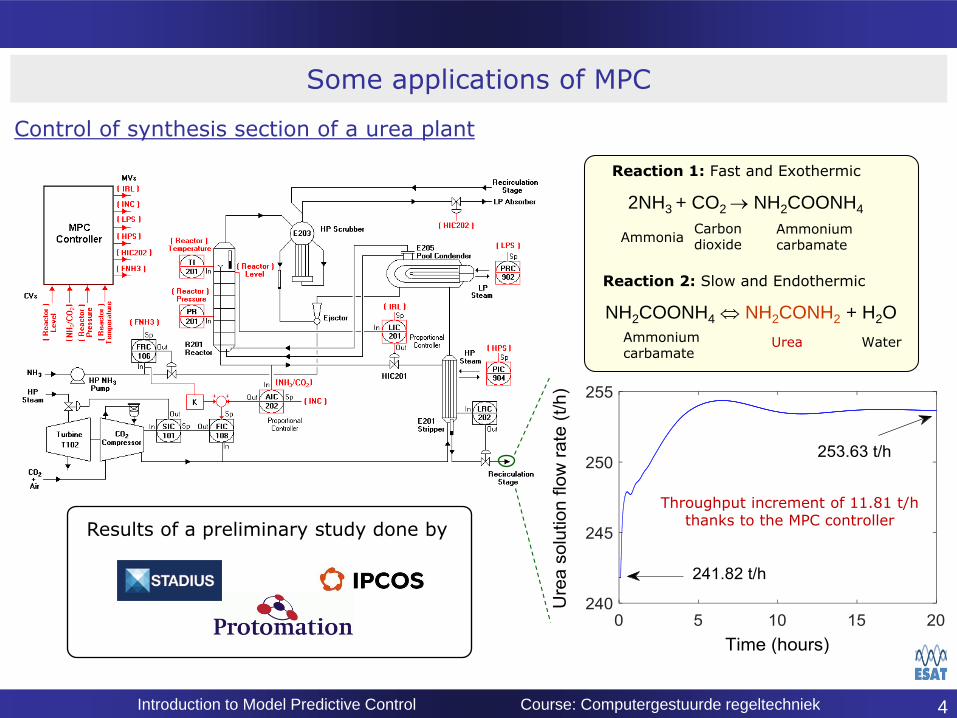
Control of synthesis section of a urea plant
Results of a preliminary study done by
Throughput increment of 11.81 t/h thanks to the MPC controller
2NH3 + CO2 NH2COONH4
AmmoniaCarbon dioxide
Ammonium carbamate
Reaction 1: Fast and Exothermic
NH2COONH4 NH2CONH2 + H2O
Ammonium carbamate
Urea Water
Reaction 2: Slow and Endothermic

Introduction to Model Predictive Control Course: Computergestuurde regeltechniek 5
Some applications of MPC
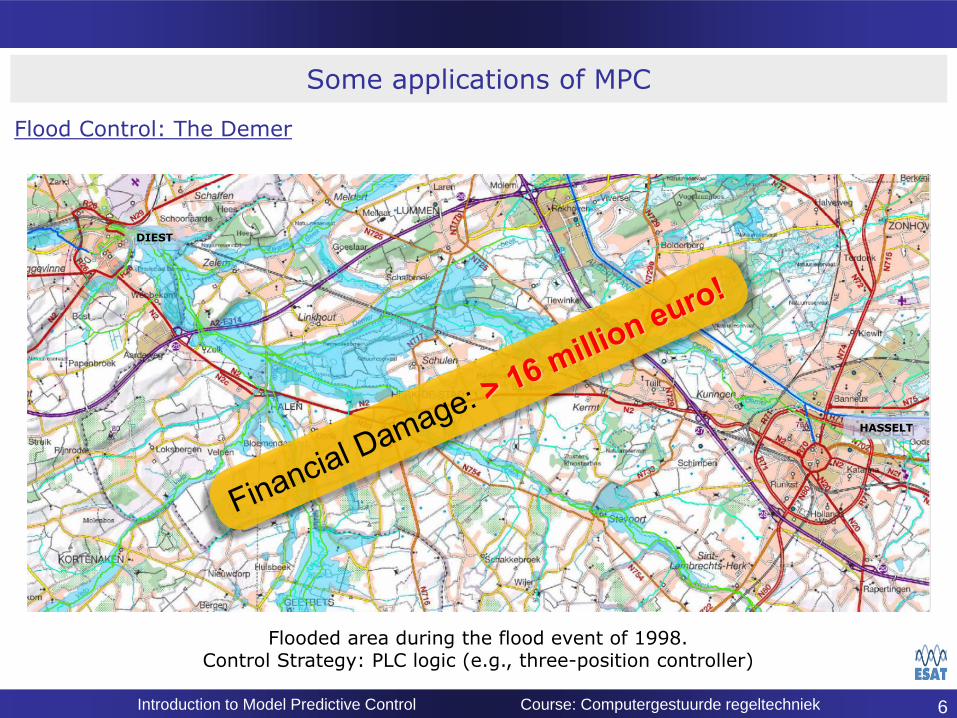
Flood Control: The Demer
The Demer in Hasselt
Flooding events due to heavy rainfall:
1905, 1926, 1965, 1966, 1993-1994,
1995, 1998, 2002 and 2010.
The Demer and its tributaries in the south of the province of LimburgControl Strategy: PLC logic
(e.g., three-pos controller)
A Nonlinear MPC control strategy has been implemented (2016) for avoiding futurefloodings of the Demer river in Belgium. Partners: STADIUS, Dept. Civil Engineering of KULeuven, IPCOS, IMDC, Antea Group, and Cofely Fabricom.
Introduction to Model Predictive Control Course: Computergestuurde regeltechniek 6
Some applications of MPC
Flood Control: The Demer
Flooded area during the flood event of 1998. Control Strategy: PLC logic (e.g., three-position controller)
DIEST
HASSELT
Introduction to Model Predictive Control Course: Computergestuurde regeltechniek 7
Some applications of MPC
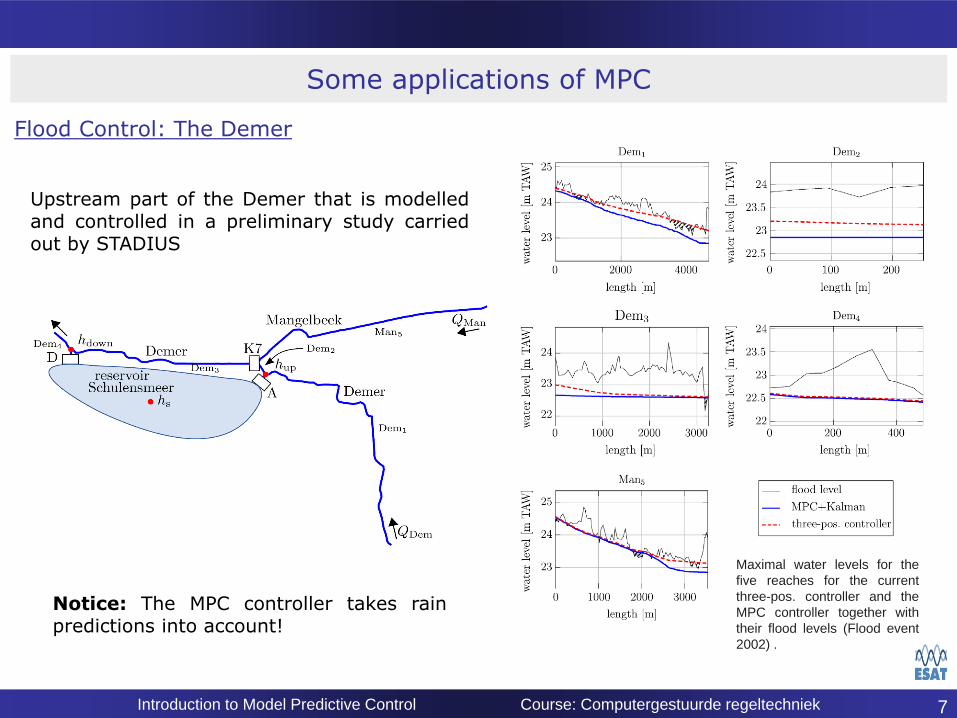
Flood Control: The Demer
Upstream part of the Demer that is modelledand controlled in a preliminary study carriedout by STADIUS
Maximal water levels for the
five reaches for the current
three-pos. controller and the
MPC controller together with
their flood levels (Flood event
2002) .
Notice: The MPC controller takes rainpredictions into account!

Introduction to Model Predictive Control Course: Computergestuurde regeltechniek 8
Some applications of MPC
In addition MPC, has been used
in all sort of petrochemical and chemical plants,
in food processing,
in automotive industry,
in the control of tubular chemical reactors,
in the normalization of the blood glucose level of critical ill patients,
in power converters,
for the control of power generating kites under changing wind conditions,
in mechatronic systems (e.g., mobile robots),
in power generation,
in aerospace,
in HVAC systems (building control)
…

Introduction to Model Predictive Control Course: Computergestuurde regeltechniek
Basic Concepts
9
Kinds of MPC
Linear MPC : it uses a linear model of the plant
Convex optimization problem
Nonlinear MPC: it uses a nonlinear model of the plant
Non-convex optimization problem
( 1) ( ) ( )k k k x Ax Bu
( 1) ( ), ( )k k k x f x u
Linear MPC formulation (Classical MPC)
Remark: Since linear MPC includes constraints, it is a non-linear control strategy !!!
1
ref reref ref
1
f,
0
( ) ( )min ( ) ( )( (( ) ) ( ))N N
NNT
ii
Tk i k i k i k k i k i k i k ii
x u
x x Q x x u u R u u
subject to
( 1 ) ( ) ( ), 0,1, , 1,k i k i k i i N x Ax Bu
max( ) , 0,1, , 1,k i i N u u
max( ) , 1,2, , ,k i i N x x
Model of the plant
Input constraints
State constraints
( 1); ( 2); ; ( ) ,N k k k N x x x x ( ); ( 1); ; ( 1)N k k k N u u u uwith:

Introduction to Model Predictive Control Course: Computergestuurde regeltechniek
MPC Algorithm
10
Typical MPC control Loop
MPC Algorithm
At every sampling time:
MPC Plant
Observer
( )ku
( )ky
ˆ( )kx
ref ( )kx
ref ( )ku ZOH( )tu
( )ty
sT
Digital system
Read the current state of the process, x(k)
Compute an optimal control sequence by solving the MPC optimization problem
Apply to the plant ONLY the first element of such a sequence u(k)
( ), ( 1), ( 2), , ( 1)k k k k N u u u uSolution

Introduction to Model Predictive Control Course: Computergestuurde regeltechniek
LQR and Classical MPC
11
For simplicity, Let’s assume that the references are set to zero.
LQR CLassical Linear MPC
,1
( )min ( ) (( ) )TT
k
kk kk
x u
x Q R ux u
subject to
( 1) ( ) ( ), 0,1, ,k k k k x Ax Bu
subject to
( 1) ( ) ( ), 0,1, , 1,k k k k N x Ax Bu
max( ) , 0,1, , 1,k k N u u
max( ) , 1,2, , ,k k N x x
Constraints are not taken into account
No predictive capacity
The optimal solution has the form: ( ) ( )k k u Kx
PRO
Explicit, Linear solution
Low online computational burden
CON
PRO
Takes constraints into account
Proactive behavior
CON
High online computational burden
No explicit solution
feasibility? Stability?
If N∞, and constraints are not considered the MPC and LQR give the same solution
1
,01
( ) (min ( ) () )N N
NT
ik
NTk k k k
x u
u R ux Q xk = 0
Introduction to Model Predictive Control Course: Computergestuurde regeltechniek
MPC optimization problem – Implementation details
12
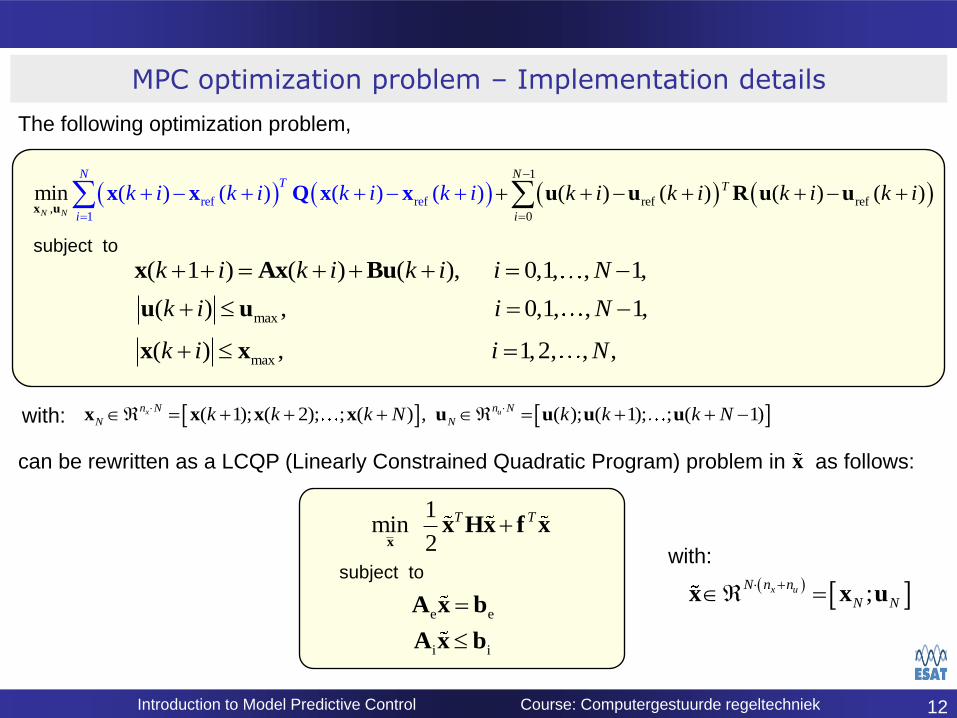
The following optimization problem,
can be rewritten as a LCQP (Linearly Constrained Quadratic Program) problem in as follows:
1
ref reref ref
1
f,
0
( ) ( )min ( ) ( )( (( ) ) ( ))N N
NNT
ii
Tk i k i k i k k i k i k i k ii
x u
x x Q x x u u R u u
subject to
( 1 ) ( ) ( ), 0,1, , 1,k i k i k i i N x Ax Bu
max( ) , 0,1, , 1,k i i N u u
max( ) , 1,2, , ,k i i N x x
with: ( 1); ( 2); ; ( ) ,xn N
N k k k N
x x x x ( ); ( 1); ; ( 1)un N
N k k k N
u u u u
x
1min
2
T Tx
x Hx f x
subject to
e eA x b
i iA x b
with:
;x uN n n
N N
x x u

Introduction to Model Predictive Control Course: Computergestuurde regeltechniek
MPC optimization problem – Implementation Details
13
where
2x u x uN n n N n n
Q
QH
R
R
ref
ref
ref
ref
(1)
( )
(0)
( 1)
x uN n n N
N
x
xf H
u
u
2
i
x
xx u x u
u
u
n N
n NN n n N n n
n N
n N
I
IA
I
I
max
2 max
i
max
max
x uN n n
x
xb
u
u
N times
N times
2N times
2N times
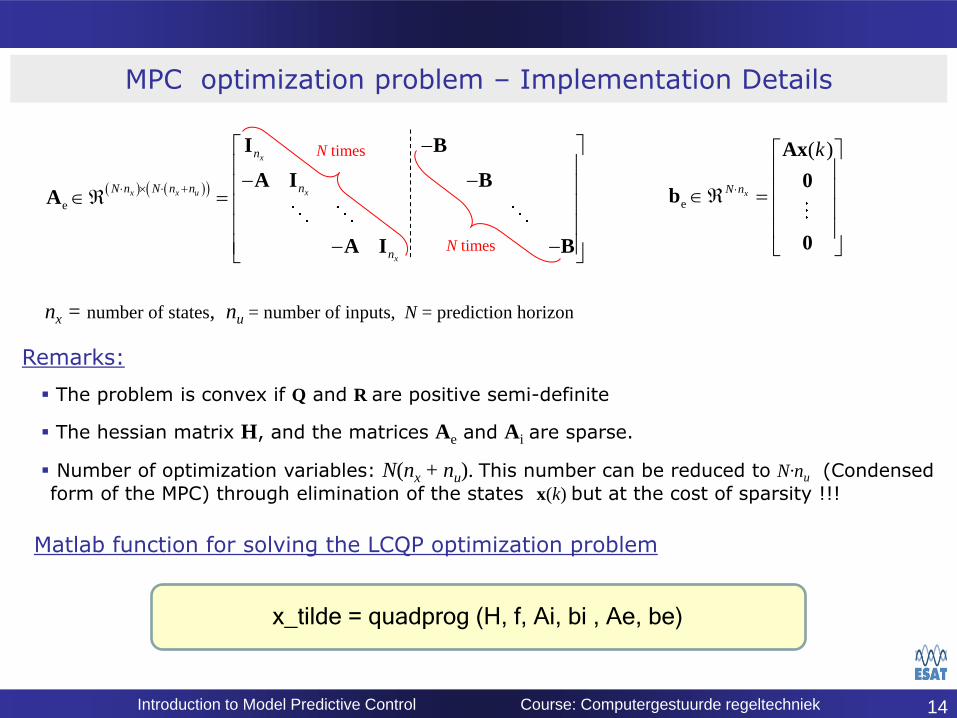
nx = number of states, nu = number of inputs, N = prediction horizon
Introduction to Model Predictive Control Course: Computergestuurde regeltechniek
MPC optimization problem – Implementation Details
14
e
x
xx x u
x
n
nN n N n n
n
I B
A I BA
A I B
e
( )
xN n
k
Ax
0b
0N times
N times
nx = number of states, nu = number of inputs, N = prediction horizon
Remarks:
The problem is convex if Q and R are positive semi-definite
The hessian matrix H, and the matrices Ae and Ai are sparse.
Number of optimization variables: N(nx + nu). This number can be reduced to N·nu (Condensed
form of the MPC) through elimination of the states x(k) but at the cost of sparsity !!!
Matlab function for solving the LCQP optimization problem
x_tilde = quadprog (H, f, Ai, bi , Ae, be)

Introduction to Model Predictive Control Course: Computergestuurde regeltechniek
MPC with terminal cost
15
Short Prediction Horizon
Large Prediction Horizon
N
What happens?
We have a winner !!!
N
What happens?
We have an accident !!!
N should be large enough in order to keep the process under control
Introduction to Model Predictive Control Course: Computergestuurde regeltechniek
MPC with terminal cost
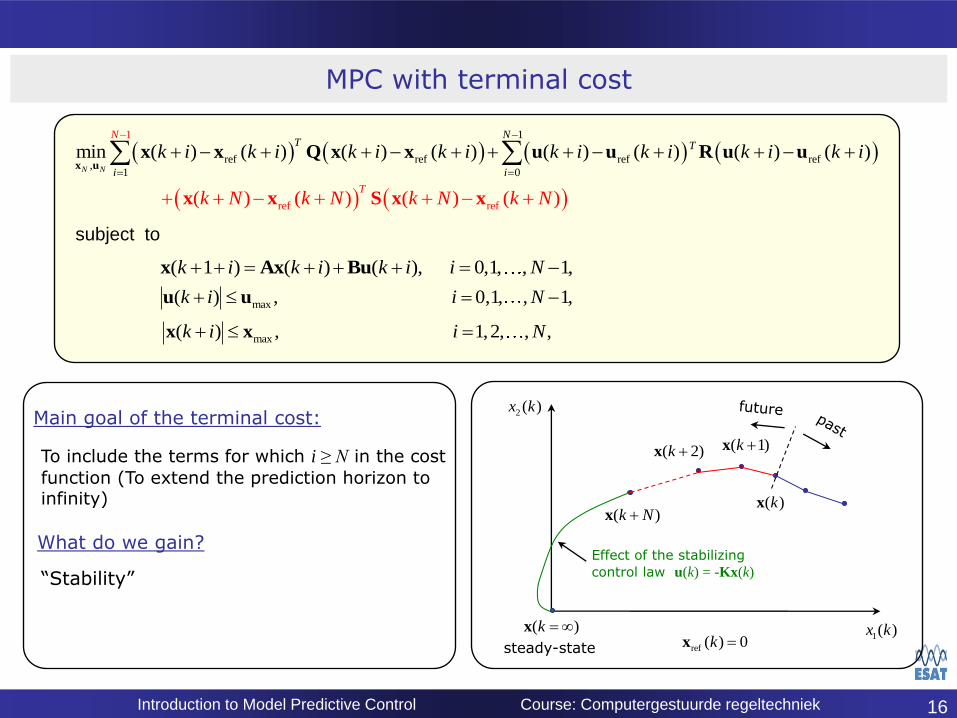
16
1
ref ref ref ref,
1 0
1
min ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )N N
NT T
i
N
i
k i k i k i k i k i k i k i k i
x u
x x Q x x u u R u u
subject to
( 1 ) ( ) ( ), 0,1, , 1,k i k i k i i N x Ax Bu
max( ) , 0,1, , 1,k i i N u u
max( ) , 1,2, , ,k i i N x x
ref ref( ) ( ) ( ) ( )T
k N k N k N k N x x S x x
Main goal of the terminal cost:
What do we gain?
To include the terms for which i ≥ N in the cost
function (To extend the prediction horizon to infinity)
“Stability”
( 1)k x( 2)k x
( )k Nx
Effect of the stabilizing
control law u(k) = -Kx(k)
1( )x k
2 ( )x k
ref ( ) 0k x
( )kx
( )k x
steady-state
Introduction to Model Predictive Control Course: Computergestuurde regeltechniek
MPC with terminal cost
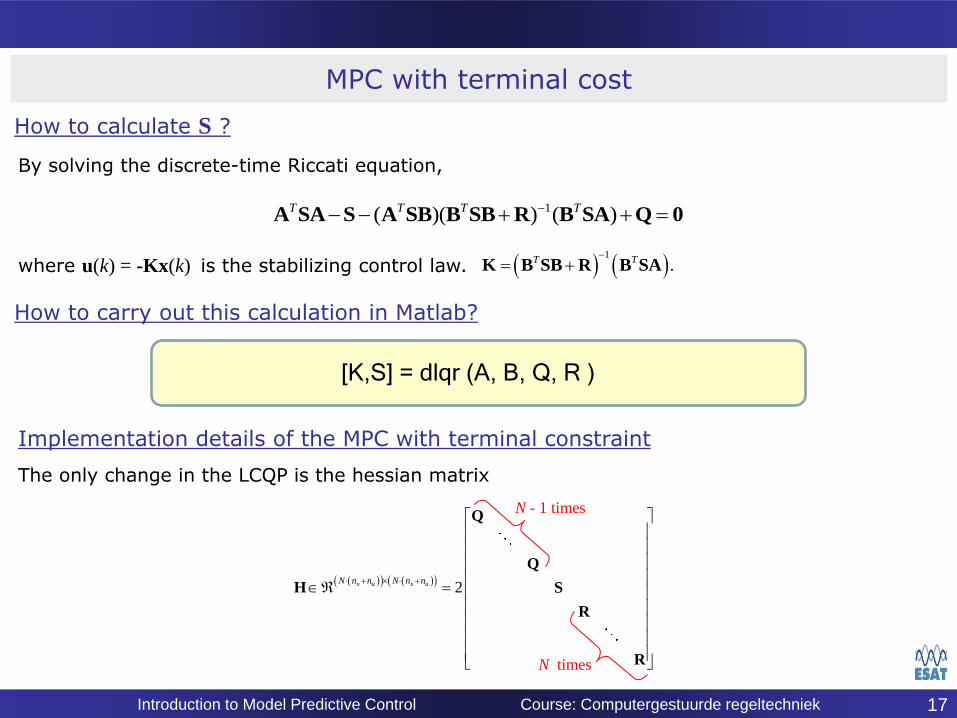
17
How to calculate S ?
By solving the discrete-time Riccati equation,
How to carry out this calculation in Matlab?
1( )( ) ( )T T T T A SA S A SB B SB R B SA Q 0
where u(k) = -Kx(k) is the stabilizing control law. 1
.T T
K B SB R B SA
[K,S] = dlqr (A, B, Q, R )
Implementation details of the MPC with terminal constraint
The only change in the LCQP is the hessian matrix
2x u x uN n n N n n
Q
Q
H S
R
R
N - 1 times
N times
Bert Pluymers
Prof. Bart De Moor
Katholieke Universiteit Leuven, Belgium
Faculty of Engineering Sciences
Department of Electrical Engineering (ESAT)
Research Group SCD-SISTA
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
H0K03a : Advanced Process Control Model-based Predictive Control 1 : Introduction
1
Overview
• MPC 1 : Introduction
• MPC 2 : Dynamic Optimization
• MPC 3 : Stability
• MPC 4 : Robustness
• Industry Speaker : Christiaan Moons (IPCOS)
(november 3rd)
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Formulation
• MPC Basics

2
Overview
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Formulation
• MPC Basics
Lesson 1 : Introduction
• Motivating example
• MPC Paradigm
• History
• Mathematical Formulation
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
3
Motivating Example
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Formulation
• MPC Basics
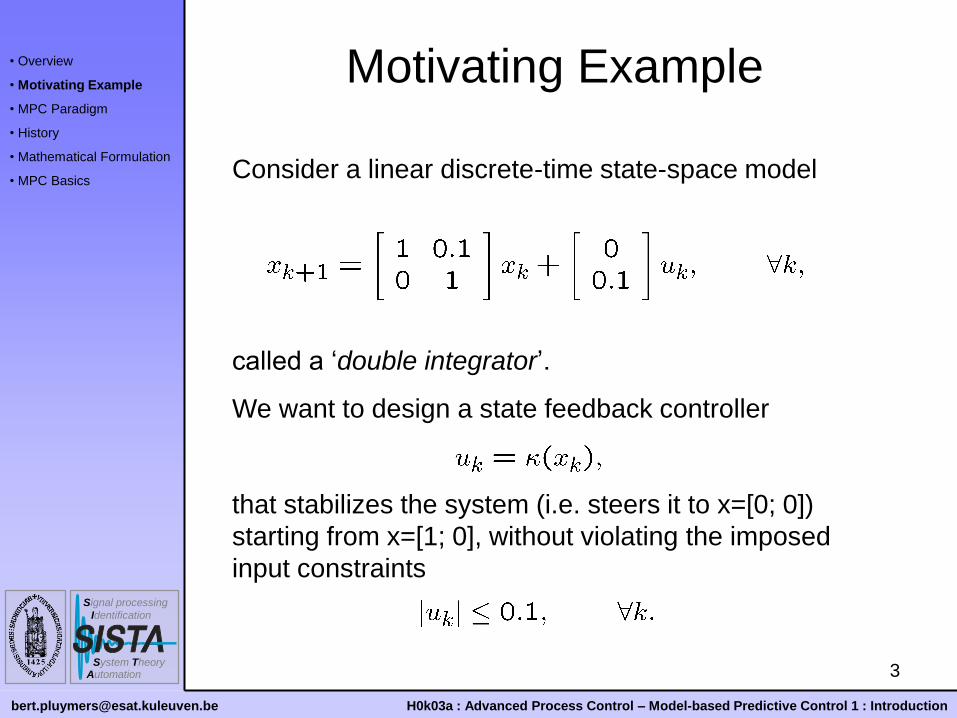
Consider a linear discrete-time state-space model
called a ‘double integrator’.
We want to design a state feedback controller
that stabilizes the system (i.e. steers it to x=[0; 0])
starting from x=[1; 0], without violating the imposed
input constraints Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]

4
Motivating Example
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Formulation
• MPC Basics
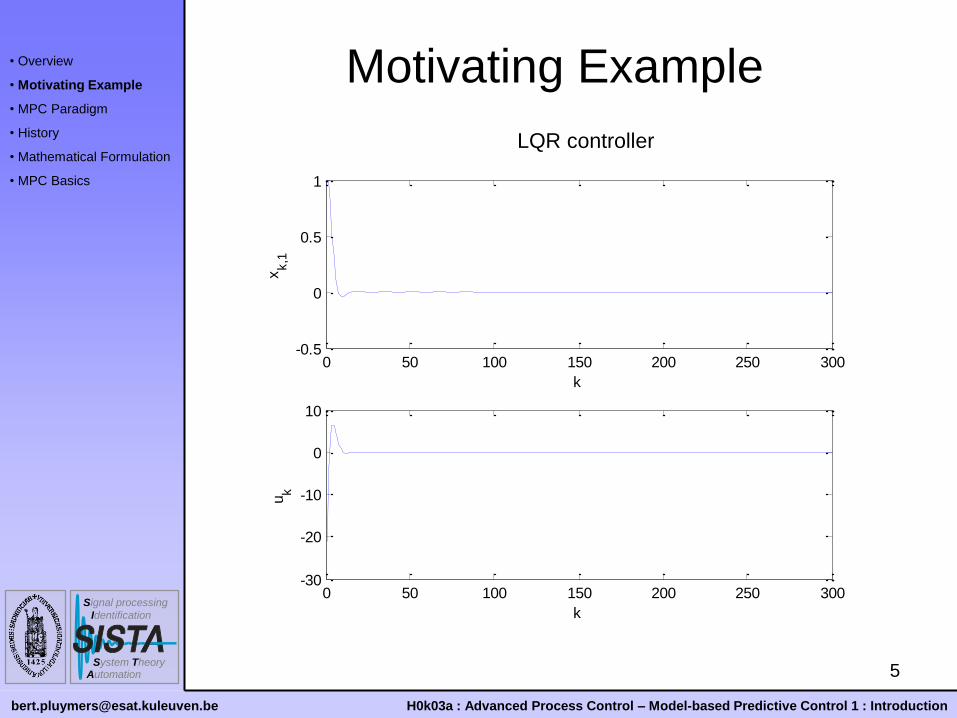
Furthermore, we want the controller to lead to a
minimal control ‘cost’ defined as
with state and input weighting matrices
A straightforward candidate is the LQR controller,
which has the form
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
5
Motivating Example
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Formulation
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
LQR controller
0 50 100 150 200 250 300-0.5
0
0.5
1
k
xk,1
0 50 100 150 200 250 300-30
-20
-10
0
10
k
uk
6
Motivating Example
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Formulation
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
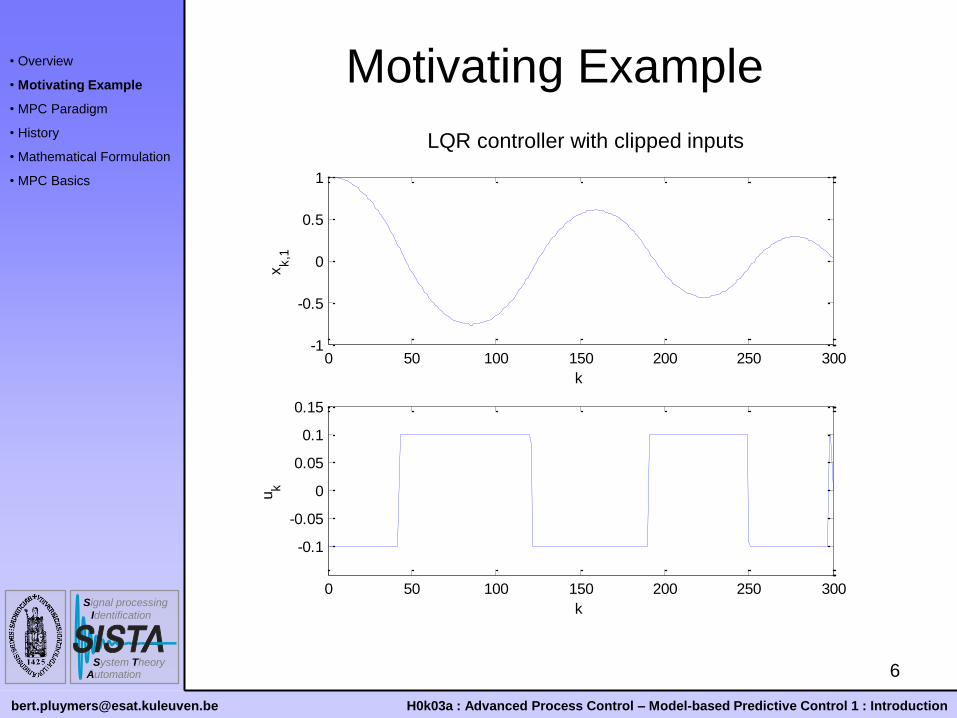
LQR controller with clipped inputs
0 50 100 150 200 250 300-1
-0.5
0
0.5
1
k
xk,1
0 50 100 150 200 250 300
-0.1
-0.05
0
0.05
0.1
0.15
k
uk

7
Motivating Example
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Formulation
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
LQR controller with R=100
0 50 100 150 200 250 300-0.5
0
0.5
1
k
xk,1
0 50 100 150 200 250 300-0.1
-0.05
0
0.05
0.1
k
uk
8
Motivating Example
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Formulation
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
P
Fuel gas
Feed
EDC
EDC / VC / HCl
Cracking
Furnace
evaporato
r
superheater
waste gas
T
P
L
T F
H
F
condenser
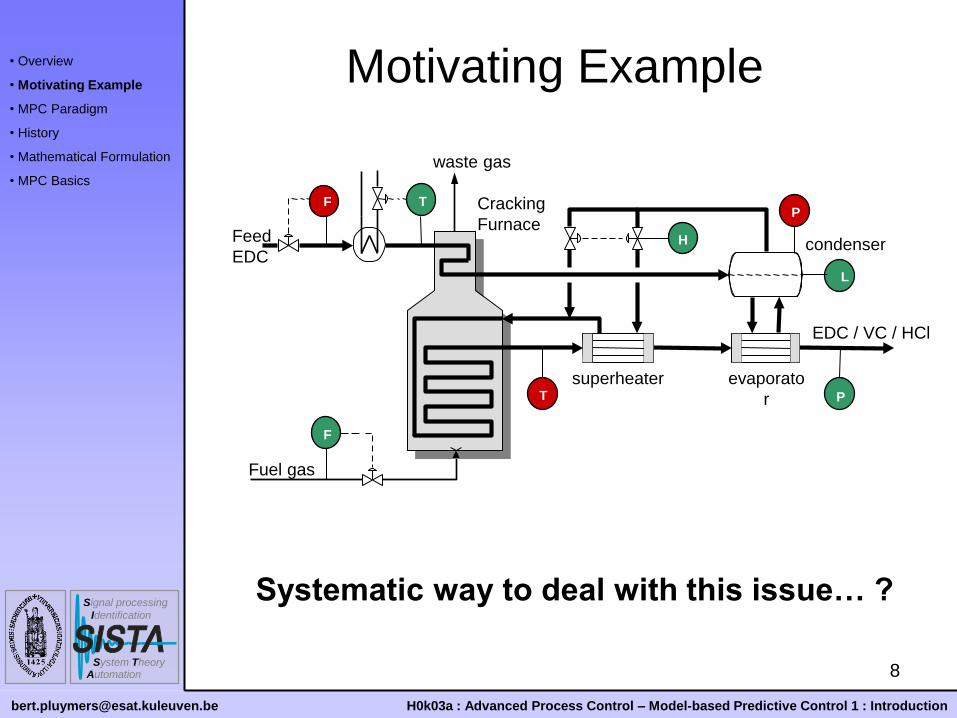
Systematic way to deal with this issue… ?
9
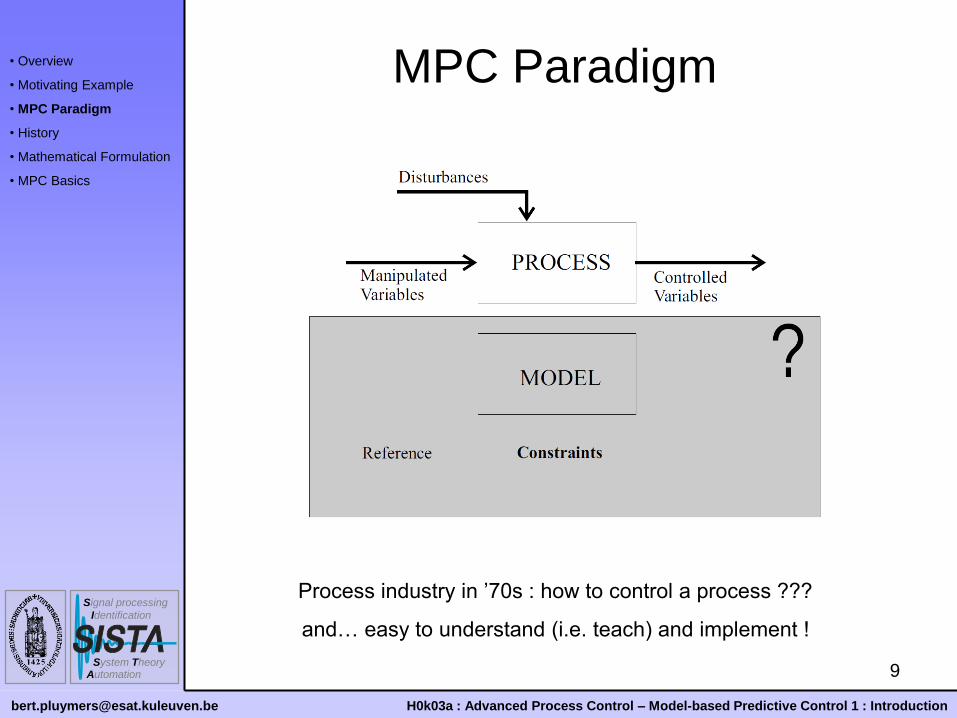
MPC Paradigm
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Formulation
• MPC Basics
Process industry in ’70s : how to control a process ???
and… easy to understand (i.e. teach) and implement !
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]

10
MPC Paradigm
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Formulation
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
→ Modelbased Predictive Control (MPC)
• Predictive : use model to optimize future input sequence
• Feedback : incoming measurements used to compensate for
inaccuracies in predictions and unmeasured disturbances

11
MPC has earned its place in the control hierarchy…
• Econ. Opt. : optimize profits using market and plant information (~day)
• MPC : steer process to desired trajectory (~minute)
• PID : control flows, temp., press., … towards MPC setpoints (~second)
MPC Paradigm
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Formulation
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
12
History
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Formulation
• MPC Basics
Before 1960’s :
• only input/output models, i.e. transfer functions, FIR
models
• Controllers :
• heuristic (e.g. on/off controllers)
• PID, lead/lag compensators, …
• mostly SISO
• MIMO case : input/output pairing, then SISO control
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]

13
History
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Formulation
• MPC Basics
Early 1960’s : Rudolf Kalman
• Introduction of the State Space model :
• notion of states as ‘internal memory’ of the system
• states not always directly measurable : ‘Kalman’ Filter !
• afterwards LQR (as the dual of Kalman filtering)
• LQG : LQR + Kalman filter
• But LQG no real succes in industry :
• constraints not taken into account
• only for linear models
• only quadratic cost objectives
• no model uncertainties Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
14
History
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Formulation
• MPC Basics
During 1960’s : ‘Receding Horizon’ concept
• Propoi, A. I. (1963). “Use of linear programming methods for synthesizing
sampled-data automatic systems”. Automatic Remote Control, 24(7), 837–844.
• Lee, E. B., & Markus, L. (1967). “Foundations of optimal control theory”. New
York: Wiley. :
“… One technique for obtaining a feedback controller synthesis
from knowledge of open-loop controllers is to measure the current
control process state and then compute very rapidly for the open-
loop control function. The first portion of this function is then used
during a short time interval, after which a new measurement of the
function is computed for this new measurement. The procedure is
then repeated. …”
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]

15
History
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Formulation
• MPC Basics
During 1960’s : ‘Receding Horizon’ concept
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]

16
History
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Formulation
• MPC Basics
1970’s : 1st generation MPC
• Extension of the LQR / LQG framework through combination with the
‘receding horizon’ concept
• IDCOM (Richalet et al., 1976) :
• IR models
• quadratic objective
• input / output constraints
• heuristic solution strategy
• DMC (Shell, 1973) :
• SR models
• quadratic objective
• no constraints
• solved as least-squares problem
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]

17
History
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Formulation
• MPC Basics
Early 1980’s : 2nd generation MPC
• Improve the rather ad-hoc constraint handling of the 1st generation
MPC algorithms
• QDMC (Shell, 1983) :
• SR models
• quadratic objective
• linear constraints
• solved as a quadratic program (QP)
Late 1980’s : 3rd generation MPC
• IDCOM-M (Setpoint, 1988), SMOC (Shell, late 80’s), …
• Constraint prioritizing
• Monitoring / Removal of ill-conditioning
• fault-tolerance w.r.t. lost signals
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
18
History
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Formulation
• MPC Basics
Mid 1990’s : 4th generation MPC
• DMC-Plus (Honeywell Hi-Spec, ‘95), RMPCT (Aspen Tech, ‘96)
• Graphical user interfaces
• Explicit control objective hierarchy
• Estimation of model uncertainty
Currently (in industry) still …
• … no guarantees for stability
• … often approximate optimization methods
• … not all support state-space models
• … no explicit use of model uncertainty in controller design Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
19
MPC Formulation
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
Basic ingredients :
• prediction model to predict plant response to future input
sequence
• (finite,) sliding window (receding horizon control)
• parameterization of future input sequence into finite number of
parameters
• discrete-time : inputs at discrete time steps
• continuous-time : weighted sum of basis functions
• optimization of future input sequence
• reference trajectory
• constraints
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
20
MPC Formulation
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
21
MPC Formulation
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
Assumptions / simplifications :
• no plant-model mismatch :
• no disturbance inputs
• all states are measured
(or estimation errors are negligible)
• no sensor noise
. . . seem trivial issues but form essential difficulties
in applications . . .
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]

22
Theoretical Formulation (cfr. CACSD)
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
• future window of length ∞
• impossible to solve, because . . .
• infinite number of optimization variables
• infinite number of inequality constraints
• infinite number of equality constraints
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]

23
Formulation 1
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
• still future window of length ∞, BUT
• quadratic cost function
• no input or state constraints
• linear model
• Optimal solution has the form uk = -Kxk
• Find K by solving Ricatti equation → LQR controller
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]

24
Formulation 1 : LQR
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
PRO
• explicit, linear solution
• low online computational complexity
CON
• constraints not taken into account
• linear model assumption
• only quadratic cost functions
• no predictive capacity
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
25
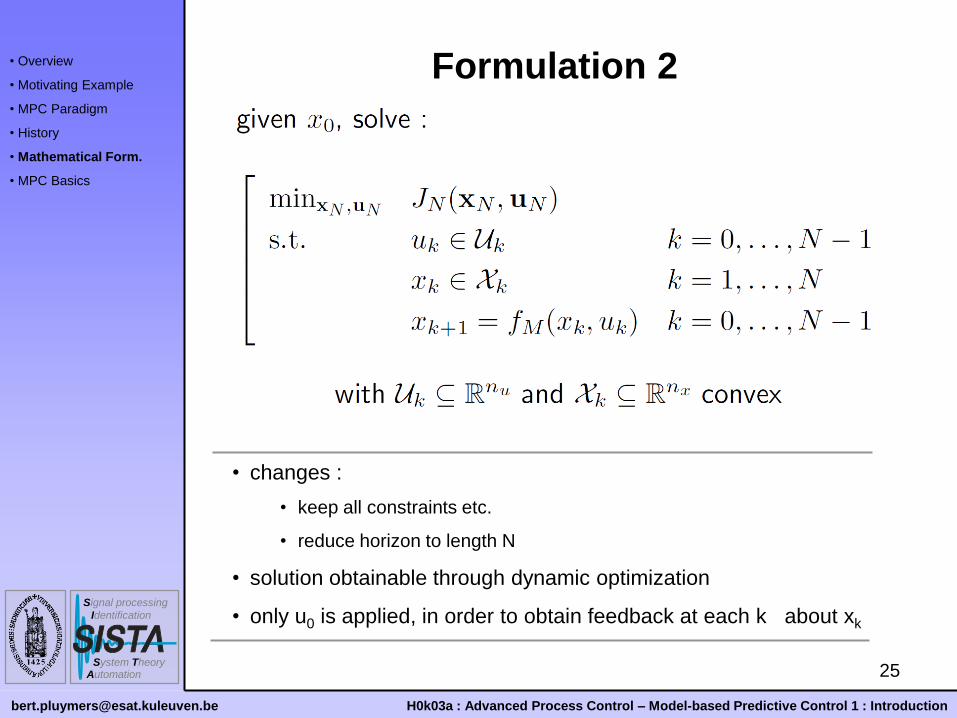
Formulation 2
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
• changes :
• keep all constraints etc.
• reduce horizon to length N
• solution obtainable through dynamic optimization
• only u0 is applied, in order to obtain feedback at each k about xk
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]

26
Formulation 2 : Classic MPC
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
PRO
• takes constraints into account
• proactive behaviour
• wide range of (convex) cost functions possible
• also for nonlinear models (but convex ?)
CON
• high online computational complexity
• no explicit solution
• feasibility ?
• stability ?
• robustness ?
• In what follows, we will concentrate on this formulation.
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]

27
Formulation 3
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
• linear form of feedback law is enforced
• problem can be recast as a convex (LMI-based) optimization problem
more on this later . . .
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
28
Summary
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
Formulation 1
• infinite horizon
• no constraints
• explicit solution
• → LQR
Formulation 2
• finite horizon
• constraints
• no explicit solution
• → Classic MPC
Formulation 3
• infinite horizon
• constraints
• explicit solution enforced
• → has elements of LQR ánd MPC
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]

29
Open vs. closed loop control
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
• Open loop : no state/output feedback : feedforward control
• Closed loop : state/output feedback : e.g. LQR
MPC is a mix of both :
• internally optimizing an open loop finite horizon control problem
• but at each k there is state feedback to compensate unmodelled
dynamics and disturbance inputs → closed loop control paradigm.
• has implications on e.g stability analysis
• Is of essential importance in Robust MPC, more on this later…
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]

30
Standard MPC Algorithm
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
1. Assume current time = 0
2. Measure or estimate x0 and solve for uN and xN :
3. Apply uo0 and go to step 1
Remarks :
• : Terminal state cost and constraint
• : some kind of norm function
• Sliding Window
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]

31
MPC design choices
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
1.prediction model
2. cost function
• norm
• horizon N
• terminal state cost
3. constraints
• typical input/state constraints
• terminal constraint

32
Prediction Model
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
• Input/Output or State-Space ?
• I/O restricted to stable, linear plants
• Hence SS-models
• Type of model determines class of MPC algorithm
• Linear model : Linear MPC
• Non-linear model : Non-linear MPC (or NMPC)
• Linear model with uncertainties : Robust MPC
• BUT : MPC is always a non-linear feedback law due to the
constraints
• Type of model determines class of involved optimization problem
• Linear models lead to most efficiently solvable opt.-problems
• Choose simplest model that fits the real plant ‘sufficiently well’
33
Cost Function
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
General Cost Function:
Design Functions and Parameters:
1.
2. Horizon N
3. F(x)
4. Reference Trajectory

34
Cost Function
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]

35
Cost Function
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
36
Cost Function
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
37
Constraints
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
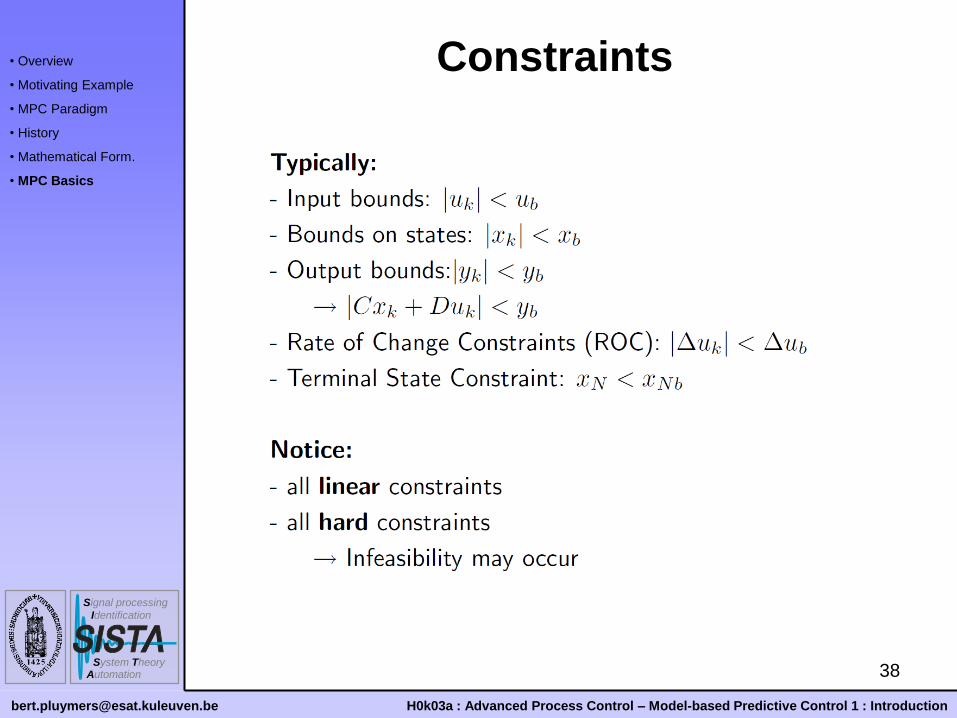
38
Constraints
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
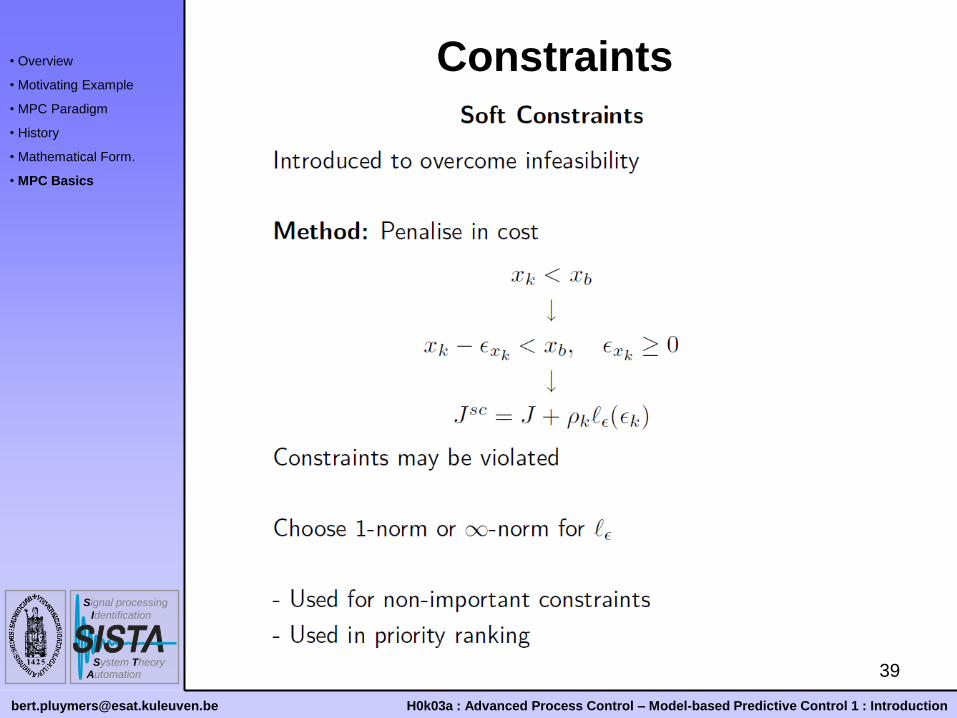
39
Constraints
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
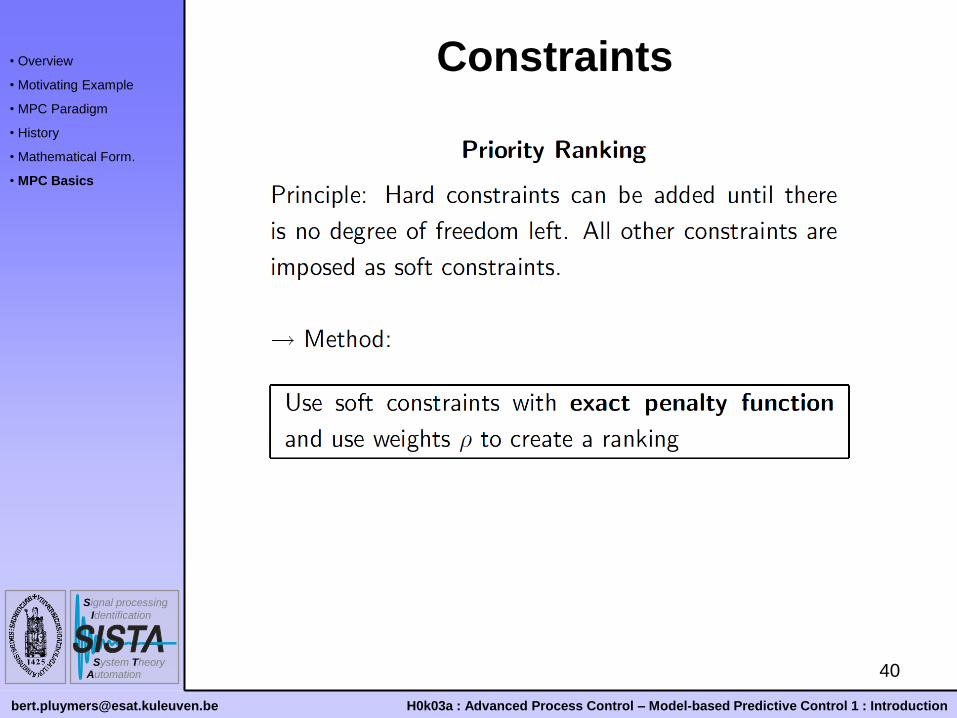
40
Constraints
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]

41
Terminal State Constraints
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
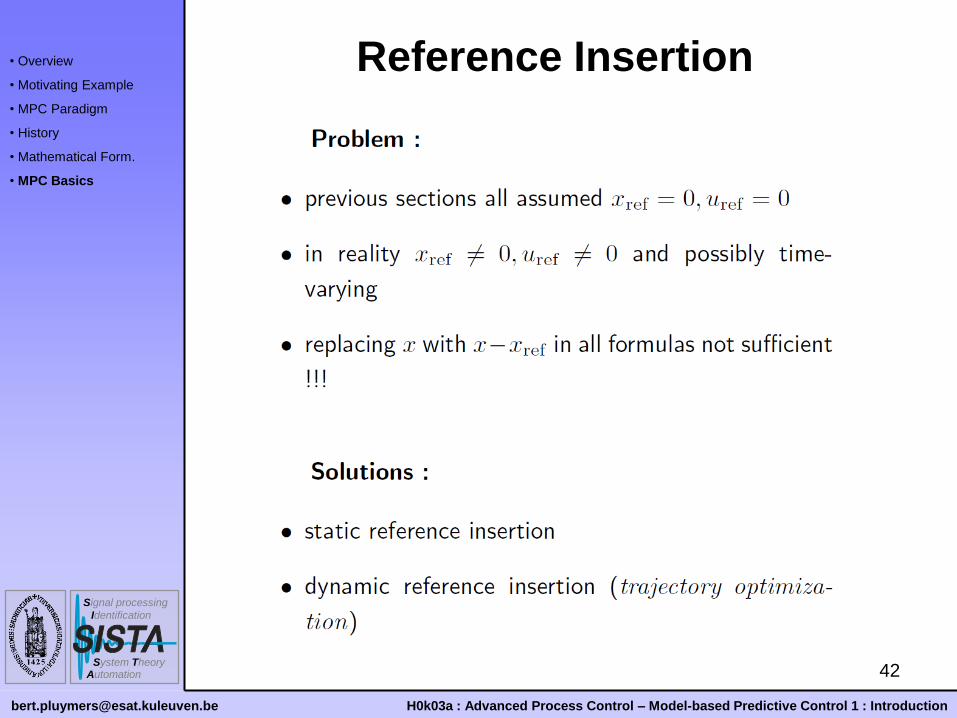
42
Reference Insertion
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
43
Reference Insertion
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
44
Reference Insertion
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
45
Reference Insertion
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]

46
Exercise Sessions
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]
• Ex. 1 : Optimization oriented
• Ex. 2 : MPC oriented
• Ex. 3 : real-life MPC/optimization problem
Evaluation
• (brief !) report (groups of 2)
• oral examination → insight !
47
• Overview
• Motivating Example
• MPC Paradigm
• History
• Mathematical Form.
• MPC Basics
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 1 : Introduction [email protected]

Bert Pluymers
Prof. Bart De Moor
Katholieke Universiteit Leuven, Belgium
Faculty of Engineering Sciences
Department of Electrical Engineering (ESAT)
Research Group SCD-SISTA
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
H0K03a : Advanced Process Control Model-based Predictive Control 2 : Dynamic Optimization

1
Overview
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Lesson 2 : Dynamic Optimization
• Optimization basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]

2
General form :
Legend :
• : vector of optimization variables
• : objective function / cost function
• : equality constraints
• : inequality constraints
• : solution to optimization problem
• : optimal function value
Notation
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]

3
Gradient :
(points in direction of
steepest ascent)
Hessian :
(gives information about local curvature of )
Gradient & Hessian
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]

4
Gradient & Hessian
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
Example :
Gradients for different Eigenvectors of hessian
at the origin ( )
5
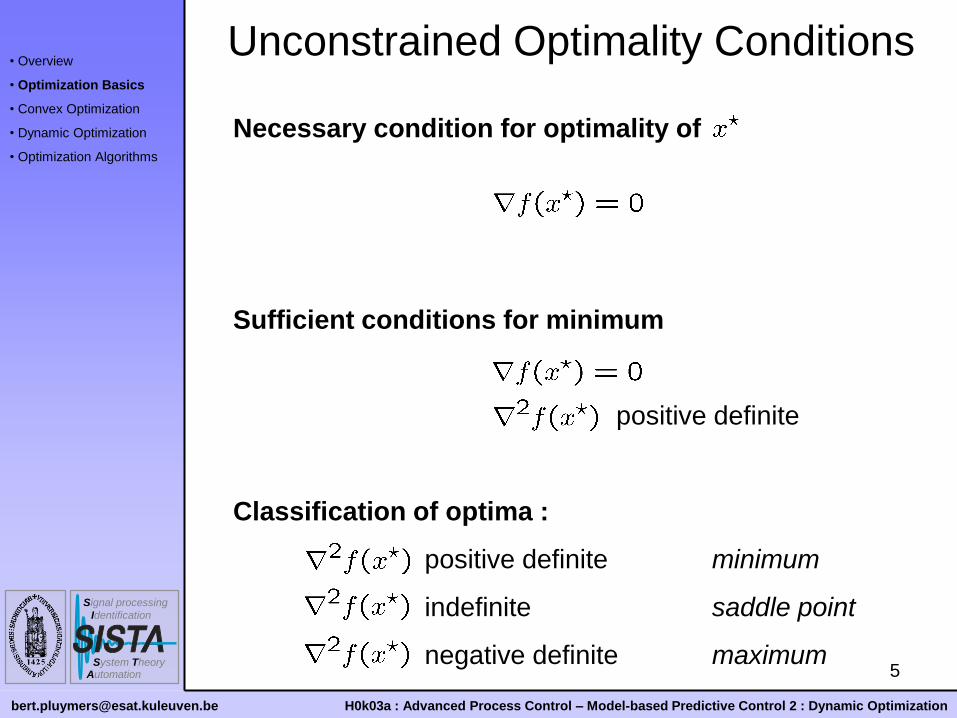
Unconstrained Optimality Conditions
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
Necessary condition for optimality of
Sufficient conditions for minimum
positive definite
Classification of optima :
positive definite minimum
indefinite saddle point
negative definite maximum

6
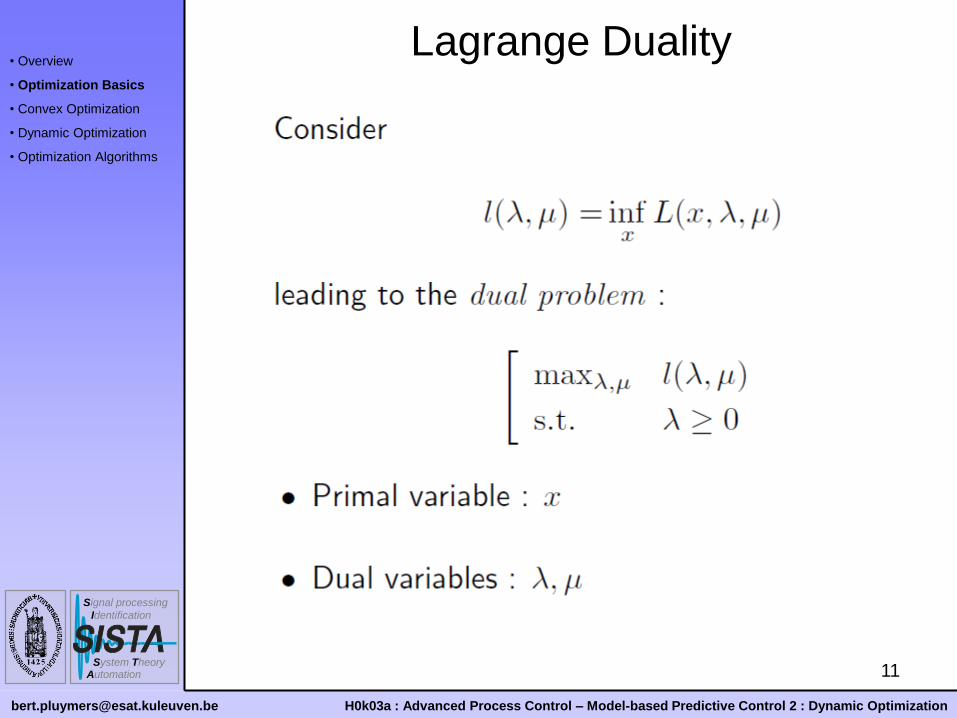
Introduction of Lagrange multipliers leads to Lagrangian :
with
Lagrange multipliers of the ineq. constraints
Lagrange multipliers of the eq. constriants
Constrained optimum can be found as
Minimization over but Maximization over !!!!
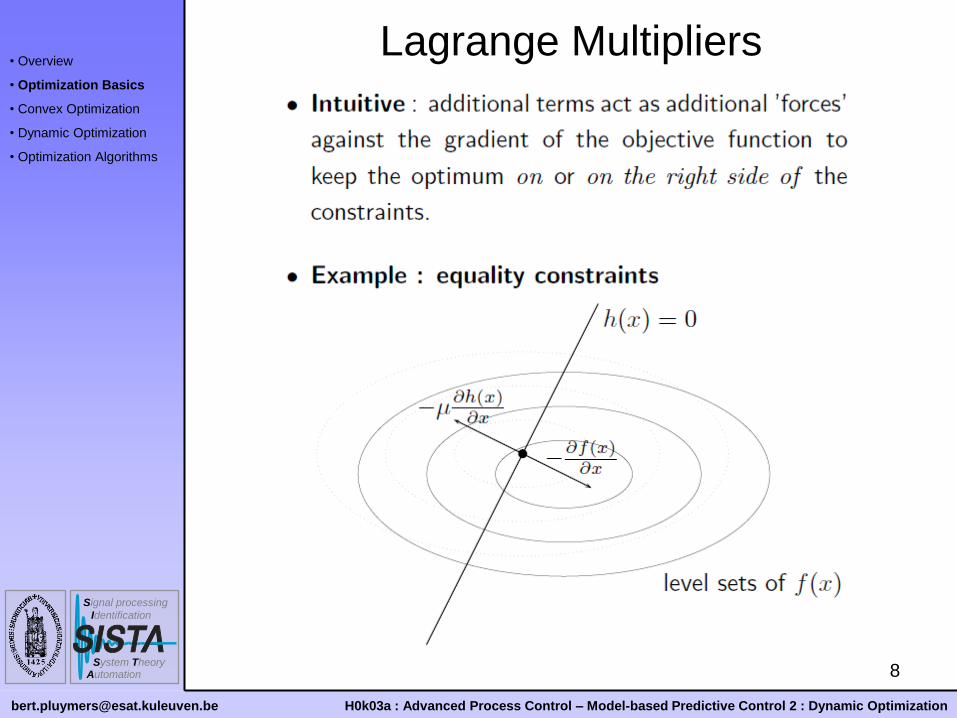
Lagrange Multipliers
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]

7
Constrained optimum can be found as
First-order optimality conditions in
Lagrange Multipliers
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
Gradient of Gradient of
ineq.
Gradient of
eq.
Interpretation ???
8
Lagrange Multipliers
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]

9
Lagrange Multipliers
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]

10
Lagrange Multipliers
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
11
Lagrange Duality
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]

12
Karush-Kuhn-Tucker Conditions
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
From previous considerations we can now state
necessary conditions for constrained optimality :
These are called the KKT conditions.
13
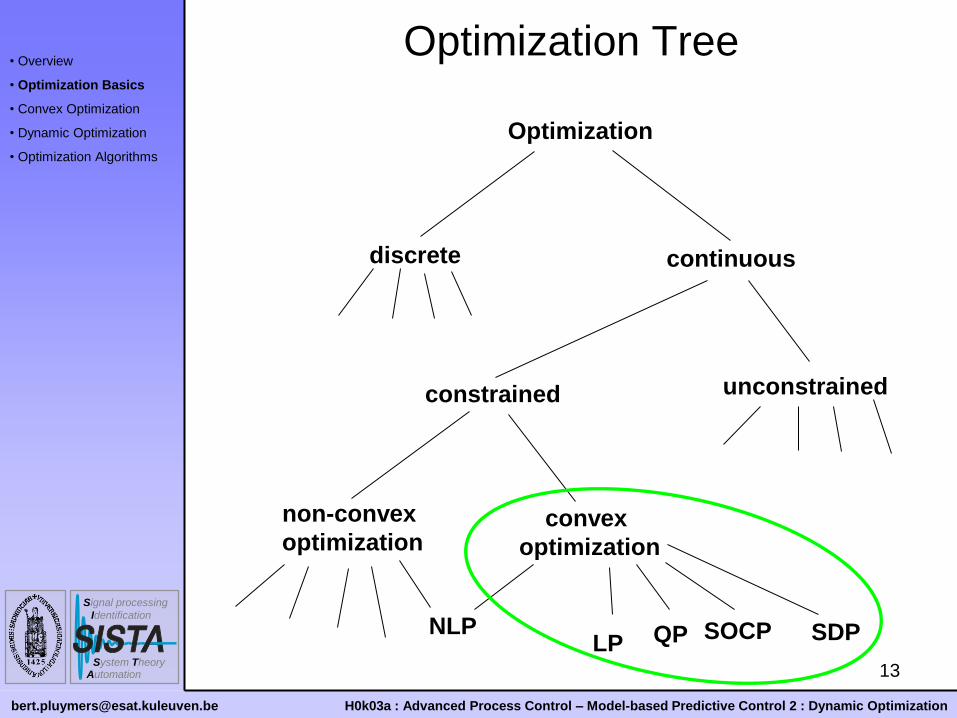
Optimization Tree
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
Optimization
discrete continuous
unconstrained constrained
convex
optimization
non-convex
optimization
NLP LP QP SOCP SDP

14
Convex Optimization
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
An optimization problem of the form
is convex iff for any two feasible points :
• is feasible
•
This is satisfied iff
•`the cost function is a convex function
• the equality constraints or linear or absent
• the inequality constraints define a convex region

15
Convex Optimization
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
Importance of convexity :
• no local minima, one global optimum
• under certain conditions, primal and dual have
same solution
• efficient solvers exist
• polynomial worst-case execution time
• guaranteed precision

16
From LP to SDP
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
SDP
SOCP
QP
LP
Semi-Definite Programming
Second Order Cone Progr.
Quadratic Programming
Linear Programming
computational
efficiency
generality
17
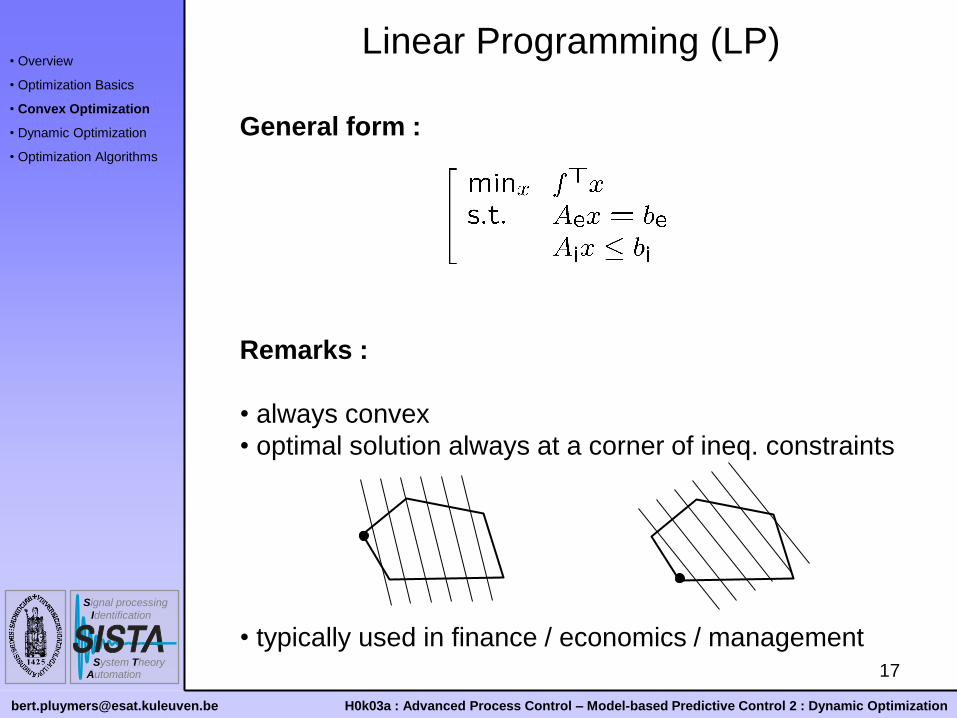
General form :
Remarks :
• always convex
• optimal solution always at a corner of ineq. constraints
• typically used in finance / economics / management
Linear Programming (LP)
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]

18
Linear Programming (LP)
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
Eliminating equality constraints :
Reparametrize optimization vector :
Leading to
19
Quadratic Programming (QP)
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
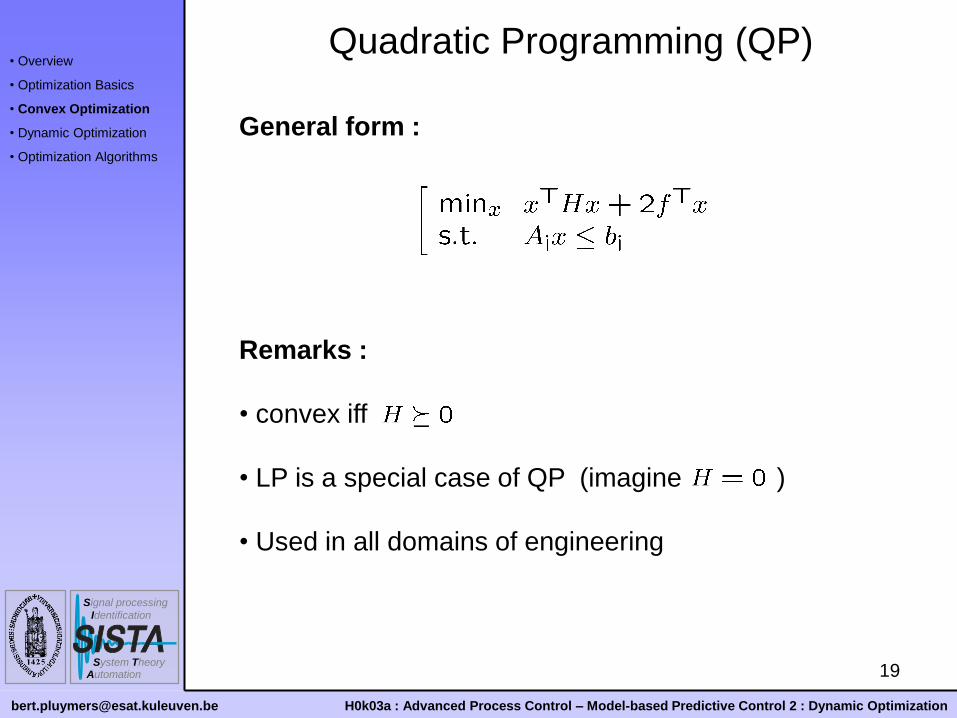
General form :
Remarks :
• convex iff
• LP is a special case of QP (imagine )
• Used in all domains of engineering
20
Second-Order Cone Programming (SOCP)
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
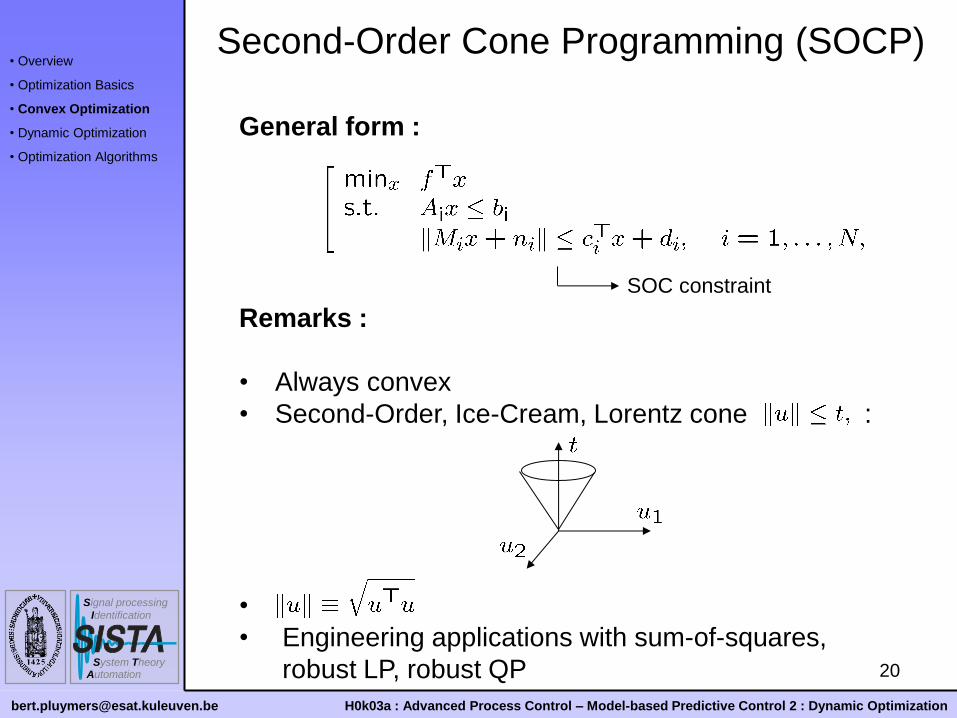
General form :
Remarks :
• Always convex
• Second-Order, Ice-Cream, Lorentz cone :
•
• Engineering applications with sum-of-squares,
robust LP, robust QP
SOC constraint
21
Second-Order Cone Programming (SOCP)
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
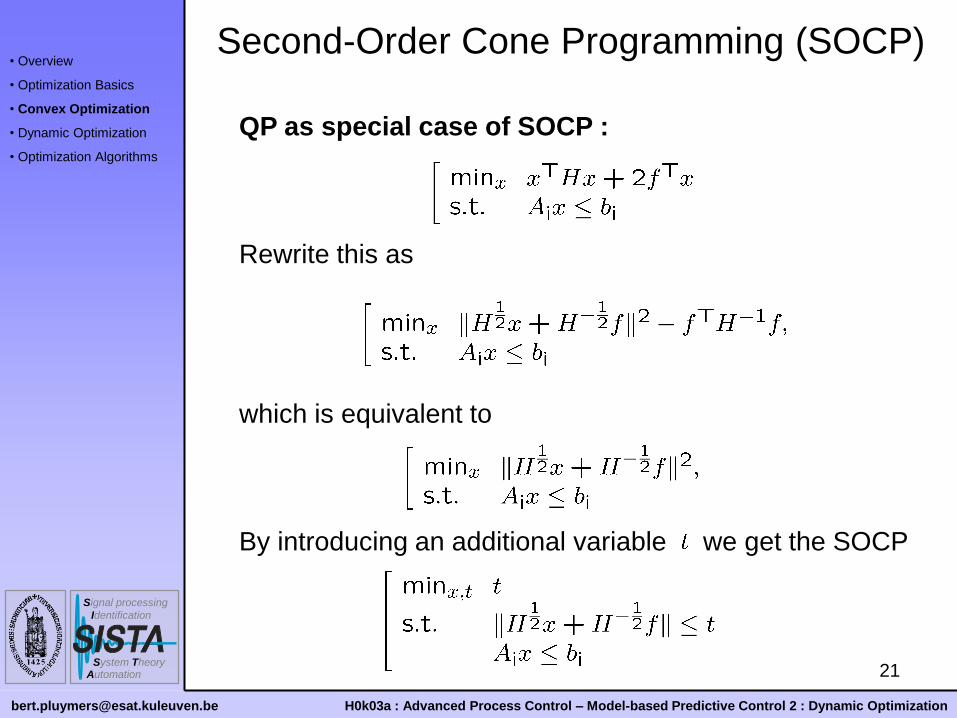
QP as special case of SOCP :
Rewrite this as
which is equivalent to
By introducing an additional variable we get the SOCP

22
Semi-Definite Programming (SDP)
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
General form :
with
Remarks :
• means that should be positive semi-definite
• means that should be pos. semi-def.
• always convex :
• ineq. constraints called LMI’s : Linear Matrix Ineq.
• LMI’s arise in many applications of
Systems & Control Theory
23
Semi-Definite Programming (SDP)
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
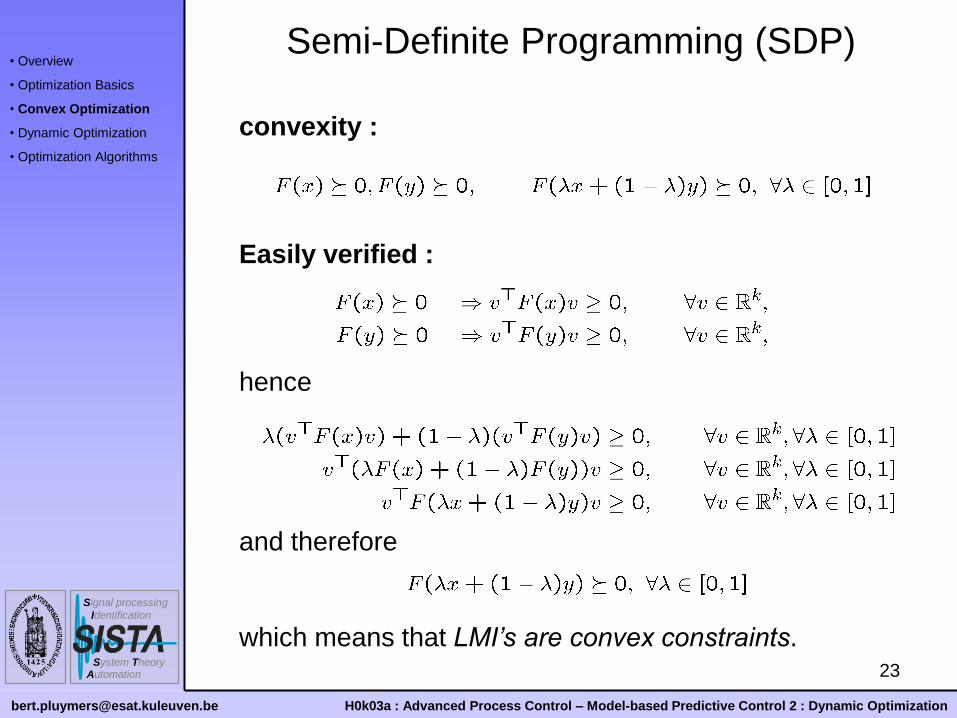
convexity :
Easily verified :
hence
and therefore
which means that LMI’s are convex constraints.
24
Semi-Definite Programming (SDP)
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
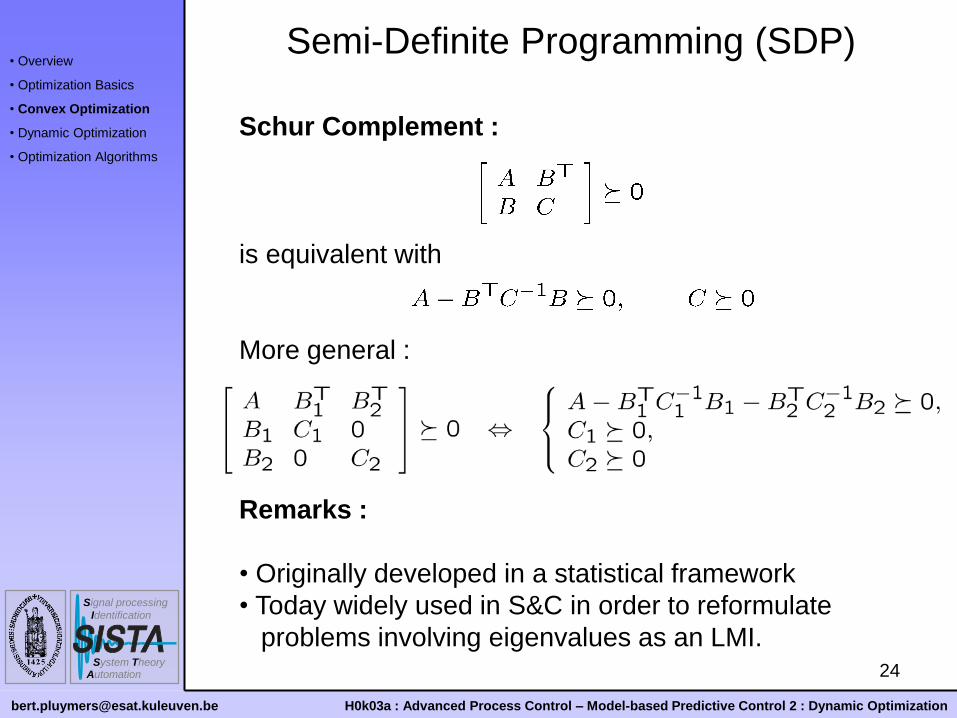
Schur Complement :
is equivalent with
More general :
Remarks :
• Originally developed in a statistical framework
• Today widely used in S&C in order to reformulate
problems involving eigenvalues as an LMI.
25
Semi-Definite Programming (SDP)
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
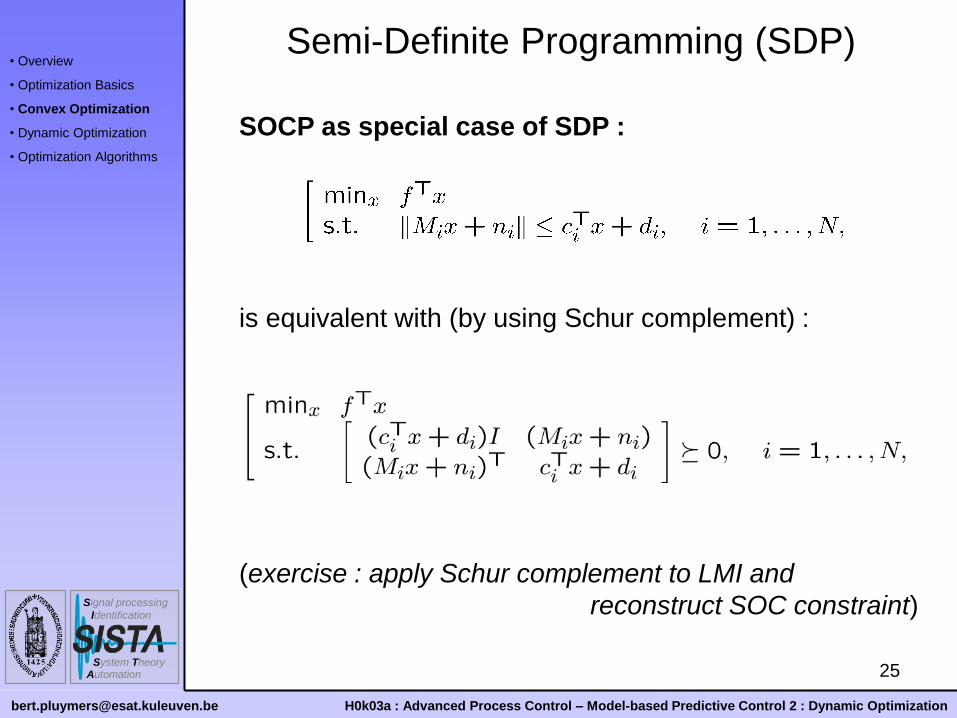
SOCP as special case of SDP :
is equivalent with (by using Schur complement) :
(exercise : apply Schur complement to LMI and
reconstruct SOC constraint)
26
Convexity = SDP ?
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
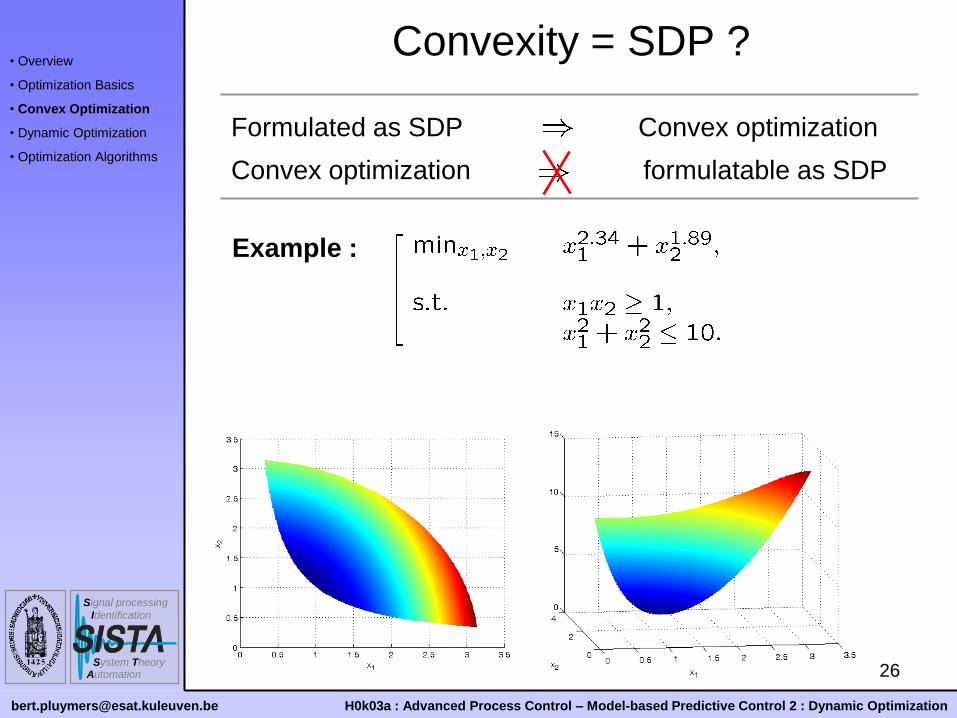
Formulated as SDP Convex optimization
Convex optimization formulatable as SDP
Example :

27
Convexity ≠ SDP !
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
SDP
SOCP
QP
LP
convex optimization
structure easily exploitable
(many toolboxes available)
→ significant efficiency gains !
convexity difficult to exploit
(computationally)

28
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
MPC Paradigm
• At every discrete time instant , given information about
the current system state , calculate an ‘optimal’ input
sequence over a finite time horizon :
• Apply the first input to the real system
• Repeat at the next time instant , using new state
measurements / estimates.
N
N

29
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
Dynamic Programming
• Finding the optimal input sequence is done by means
of Dynamic Programming
• Definition* :
“DP is a class of solution methods for solving sequential
decision problems with a compositional cost structure”
• Invented by Richard Bellman (1920-1984) in 1953

30
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
Example 1 : The darts problem* :
“Obtain a score of 301 as fast as possible while
beginning and ending in a double.”
• Decision : next area towards which to throw the dart
• Cost : time
http://plus.maths.org/issue3/dynamic/
* D. Kohler, Journal of the Operational Research Society, 1982.
Dynamic Programming

31
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
Example 2 : DNA sequence allignment :
G A A T T C A G T T A (sequence #1)
G G A T C G A (sequence #2)
• Decisions : which nucleotides to match
• Cost : e.g. based on substitution / insertion prob.
• Algorithms : Baum/Welch, Waterman/Smith, …
Dynamic Programming
32
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
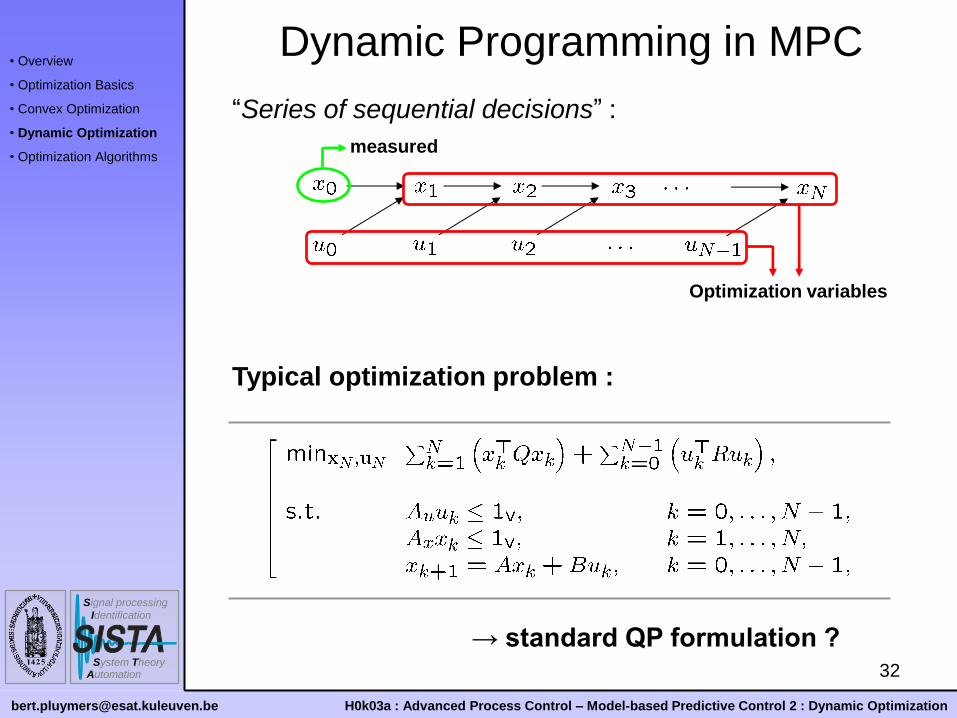
“Series of sequential decisions” :
Dynamic Programming in MPC
Typical optimization problem :
measured
Optimization variables
→ standard QP formulation ?

33
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
Optimization vector :
Cost function :
For convexity hence .
Linear MPC as standard QP
34
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
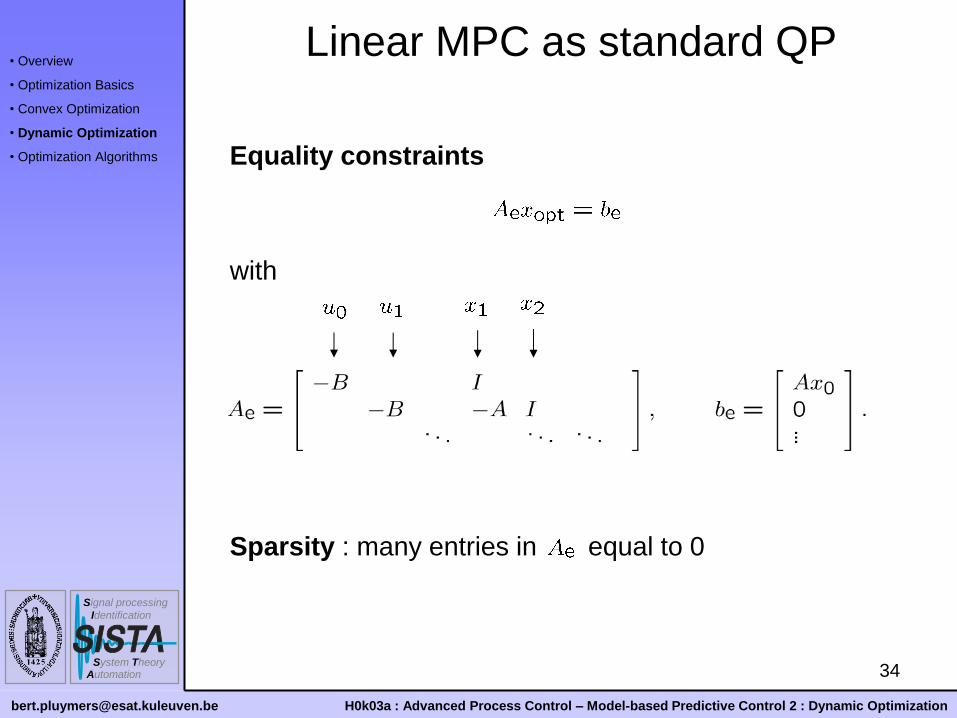
Equality constraints
with
Sparsity : many entries in equal to 0
Linear MPC as standard QP

35
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
Inequality constraints
with
Sparsity : many entries in equal to 0
Linear MPC as standard QP
36
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
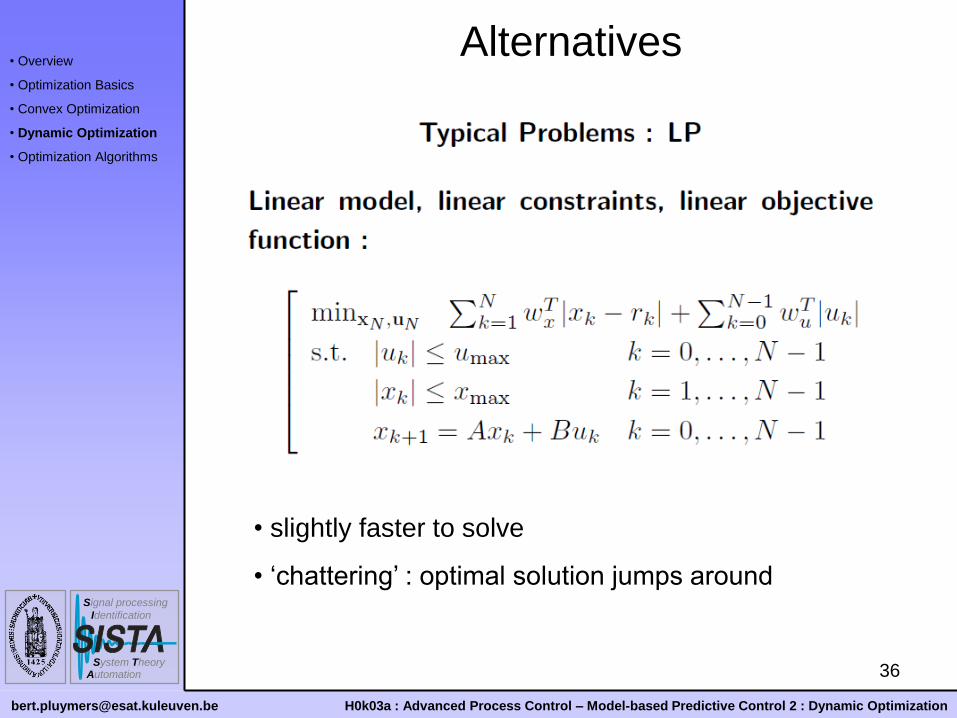
Alternatives
• slightly faster to solve
• ‘chattering’ : optimal solution jumps around
37
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
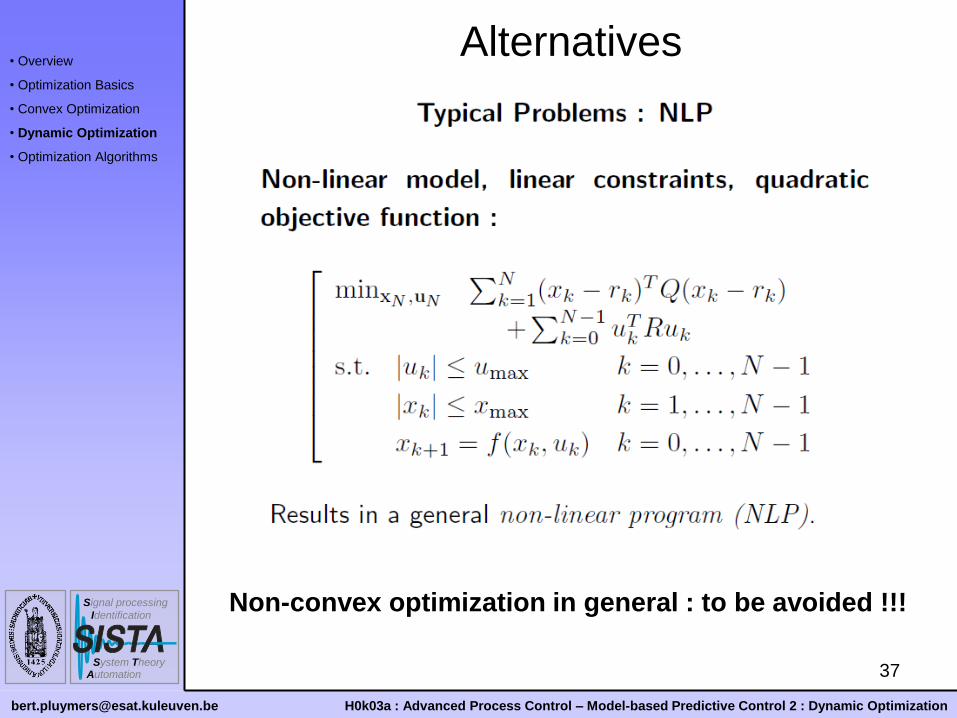
Alternatives
Non-convex optimization in general : to be avoided !!!
38
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
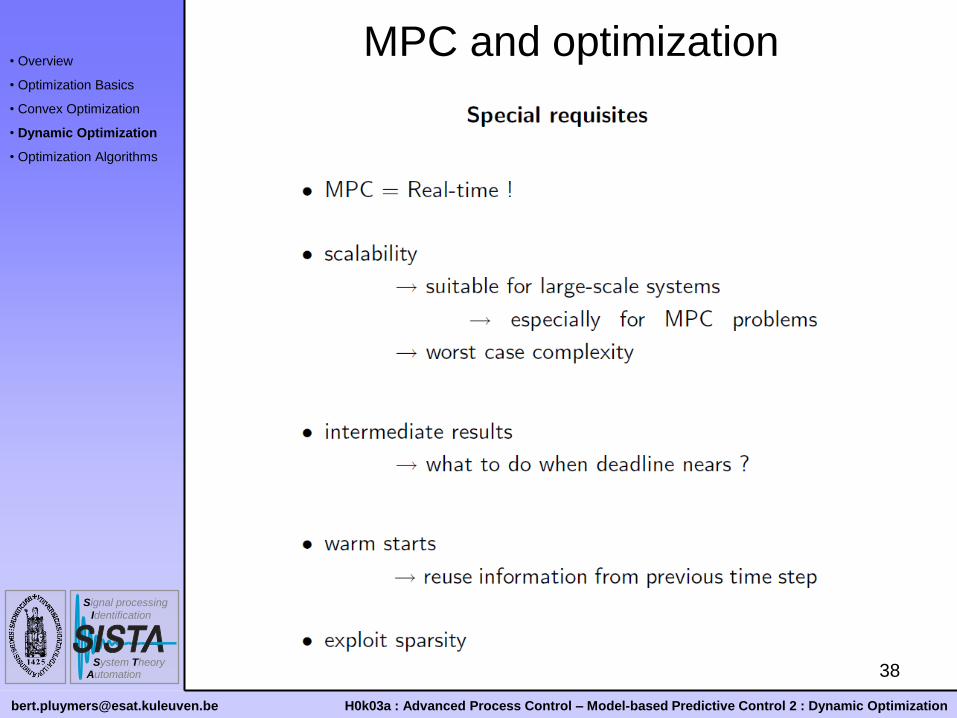
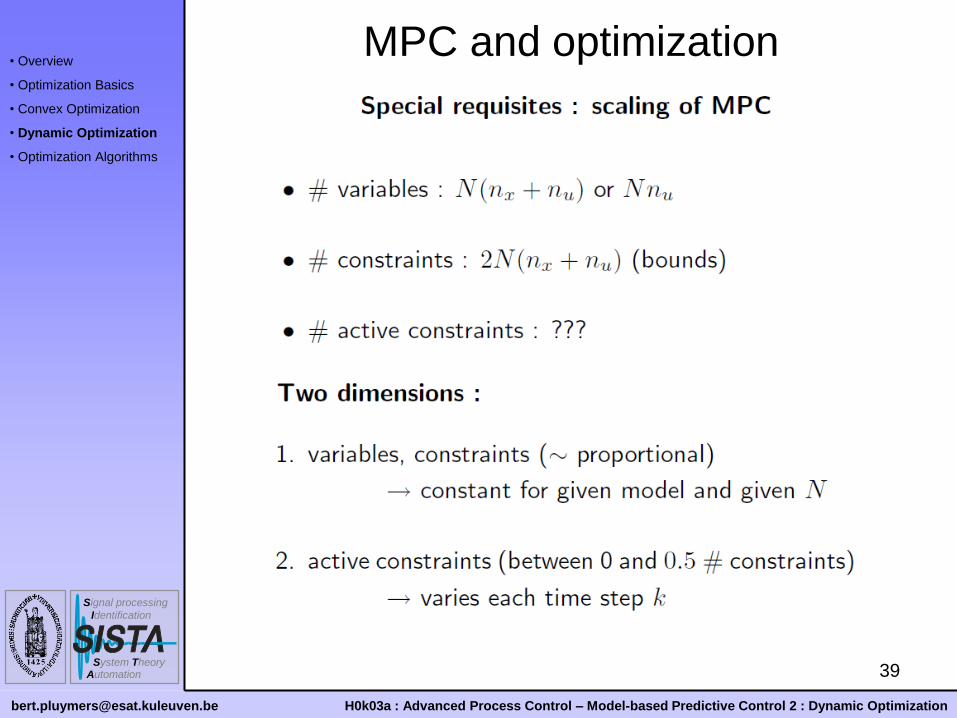
MPC and optimization
39
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
MPC and optimization
40
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
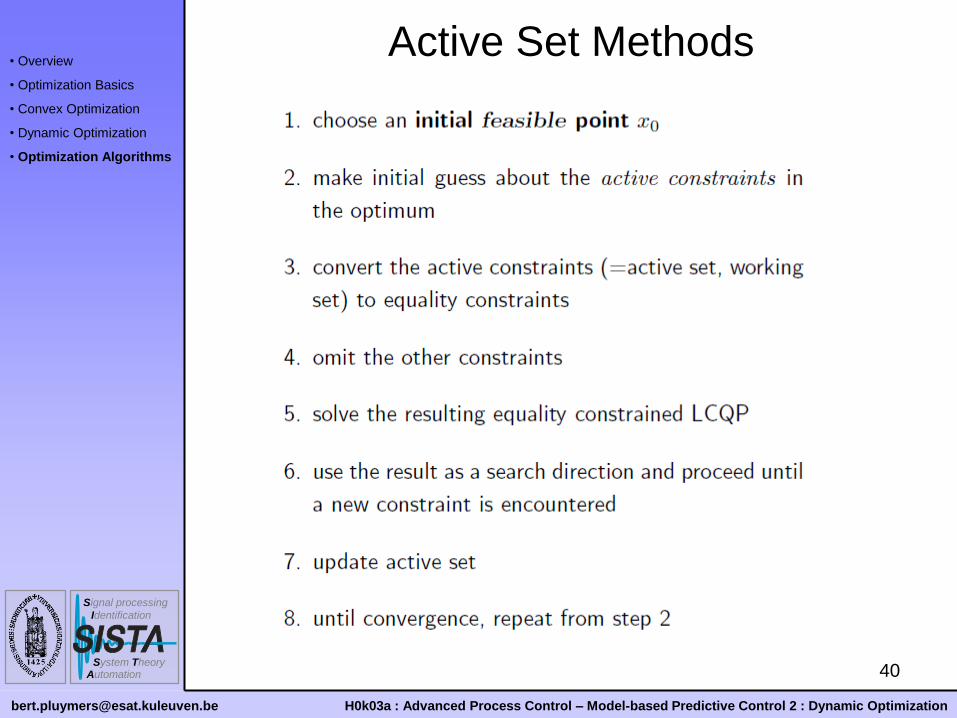
Active Set Methods

41
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
Active Set Methods
42
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
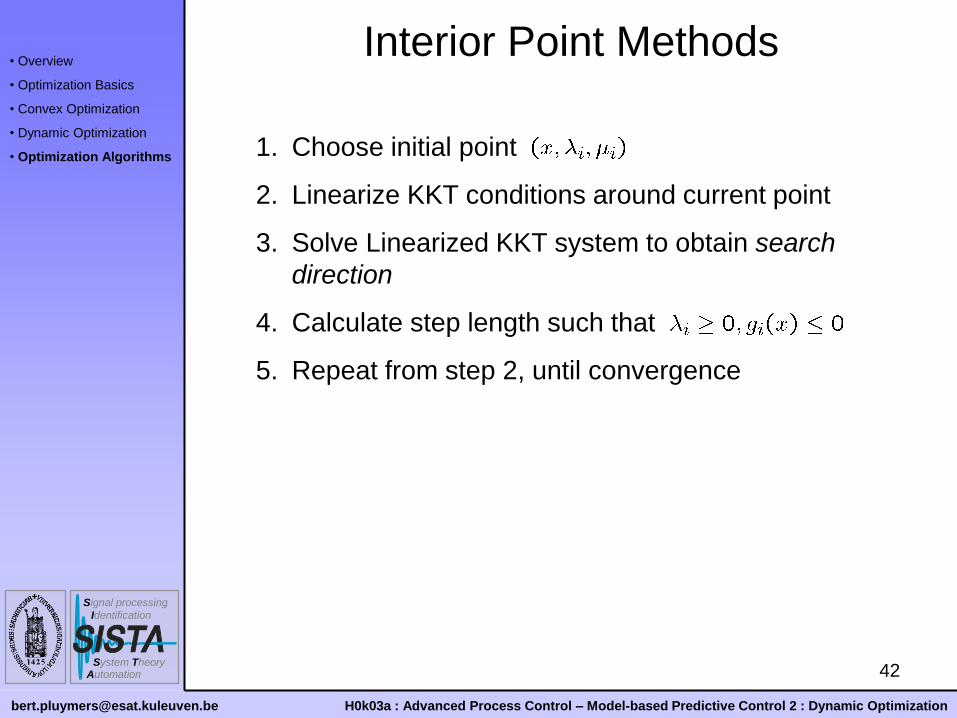
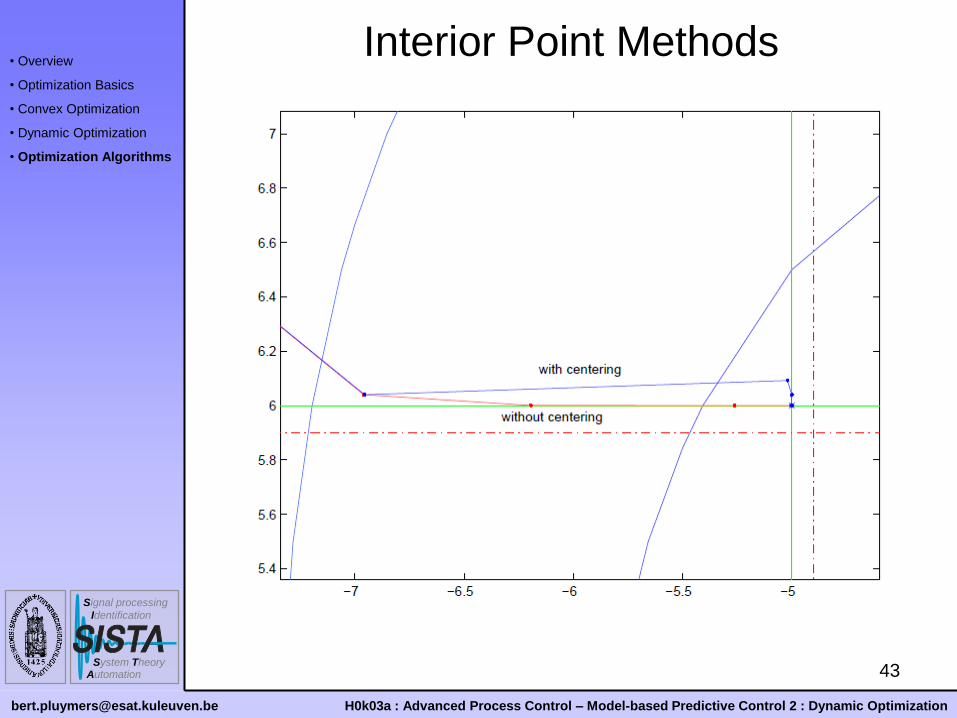
Interior Point Methods
1. Choose initial point
2. Linearize KKT conditions around current point
3. Solve Linearized KKT system to obtain search
direction
4. Calculate step length such that
5. Repeat from step 2, until convergence
43
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
Interior Point Methods
44
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
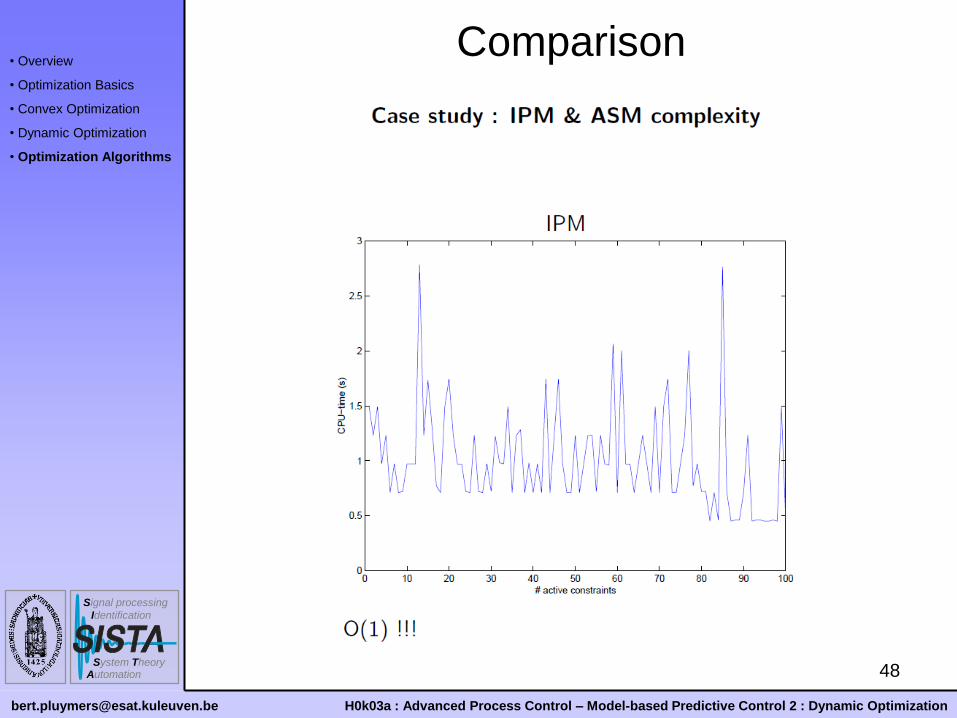
Comparison
• ASM allow hot start
• reuse of active set, factorizations, …
• ASM has feasible intermediate results
• by construction
• IPM can exploit sparsity
• solution of KKT system by sparse solver
In industry currently mostly ASM due to first two
advantages, but IPM under consideration…
45
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
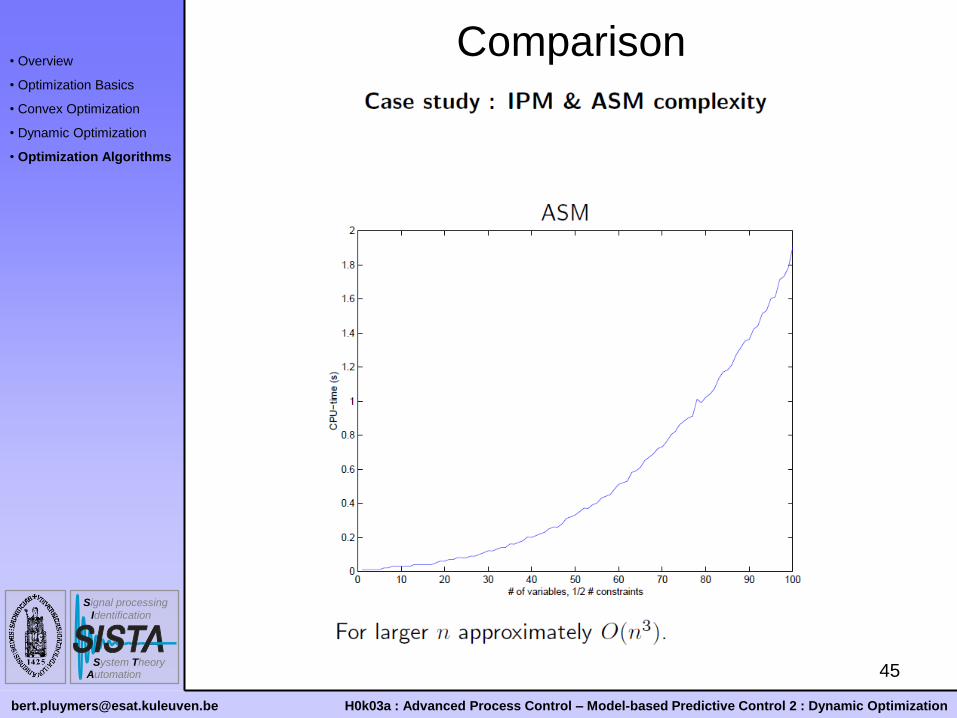
Comparison
46
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
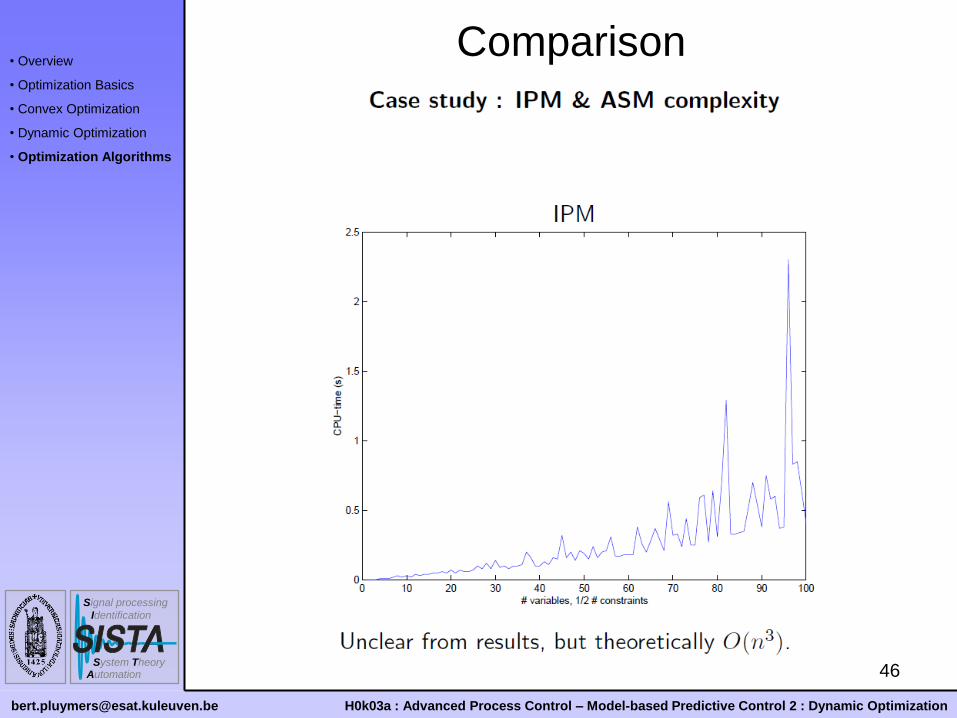
Comparison

47
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
Comparison
48
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
Comparison

49
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
Conclusion
• convex optimization powerful tool !!!
• different optimization algorithm have pro’s and con’s
• try to avoid NLP’s !!!!
50
• Overview
• Optimization Basics
• Convex Optimization
• Dynamic Optimization
• Optimization Algorithms
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 2 : Dynamic Optimization [email protected]
References

Bert Pluymers
Prof. Bart De Moor
Katholieke Universiteit Leuven, Belgium
Faculty of Engineering Sciences
Department of Electrical Engineering (ESAT)
Research Group SCD-SISTA
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
H0K03a : Advanced Process Control Model-based Predictive Control 3 : Stability
1
Overview
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Lecture 3 : Stability
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
2
MPC Paradigm
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
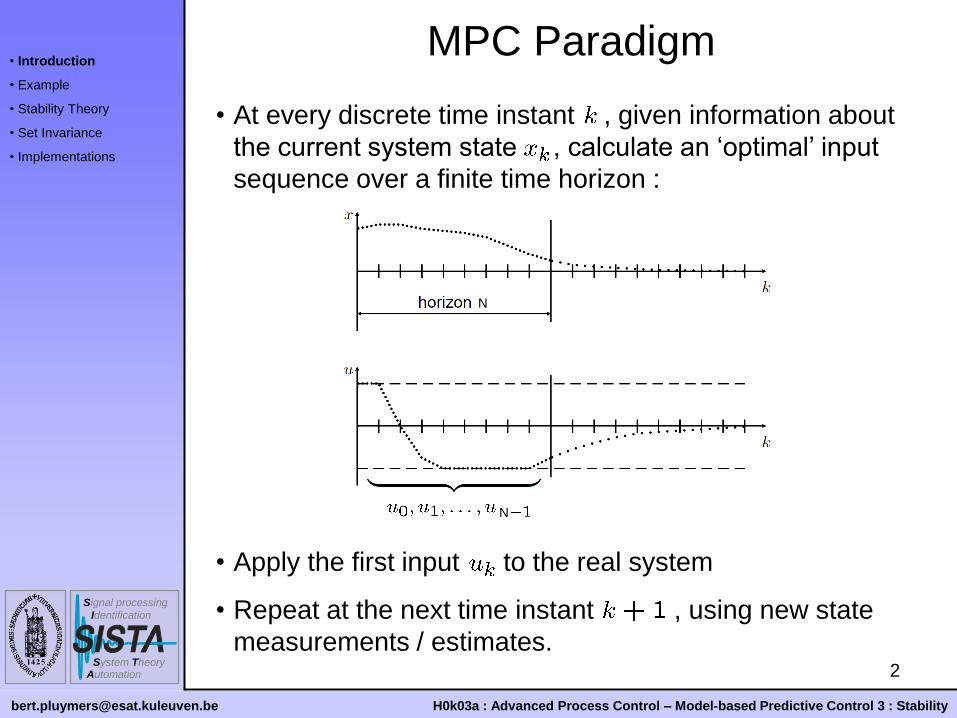
• At every discrete time instant , given information about
the current system state , calculate an ‘optimal’ input
sequence over a finite time horizon :
• Apply the first input to the real system
• Repeat at the next time instant , using new state
measurements / estimates.
N
N
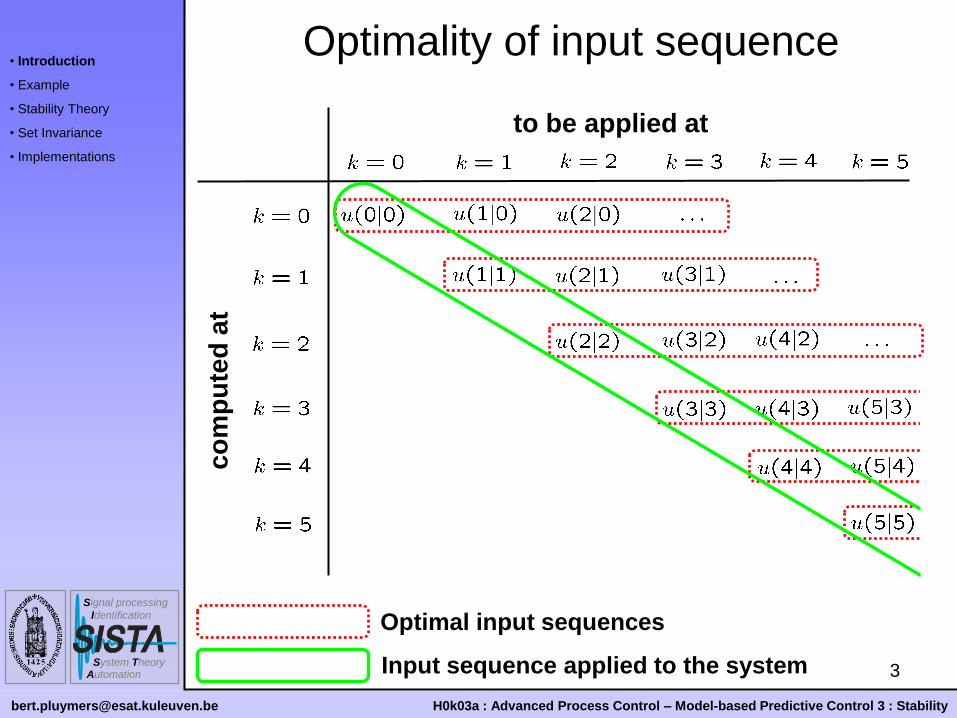
3
Optimality of input sequence
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
co
mp
ute
d a
t
to be applied at
Optimal input sequences
Input sequence applied to the system
4
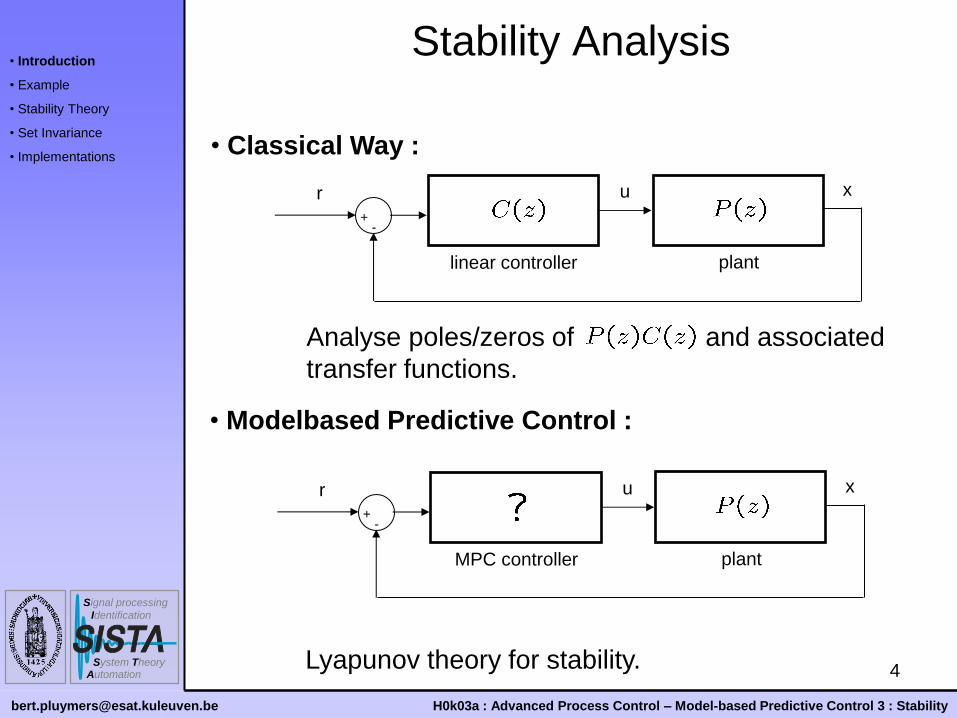
Stability Analysis
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
• Classical Way :
Analyse poles/zeros of and associated
transfer functions.
+ -
plant linear controller
u x r
+ -
plant MPC controller
u x r
• Modelbased Predictive Control :
Lyapunov theory for stability.

5
Inverted Pendulum
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
• 1 input :
• 4 states :
• open loop unstable system
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]

6
Inverted Pendulum
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
• 4 different horizon lengths
• 3 different MPC variants (to be defined later)
Non-minimum phase
behaviour

7
Stability Theory
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
• Explicit vs. Optimization-based controller
• Transfer functions → Lyapunov theory
Stability is obtained / proven in 2 steps :
1. Recursive feasibility
i.e. controller well-defined for all k
2. Lyapunov function construction
i.e. trajectories converge to equilibrium
8
Stability Theory
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
Limited validity of MPC stability framework :
• only for ‘stabilization’ problems :
• initial state
• system steered towards
• no disturbances allowed (but extension possible)
• no general stability framework for ‘tracking’ problems

9
Stability Theory
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
Recursive Feasibility
If the optimization problem is feasible for time , then it
is also feasible for time .
(and hence for all )
Feasible Region
The region in state space, defined by all states for
which the MPC optimization problem is feasible.
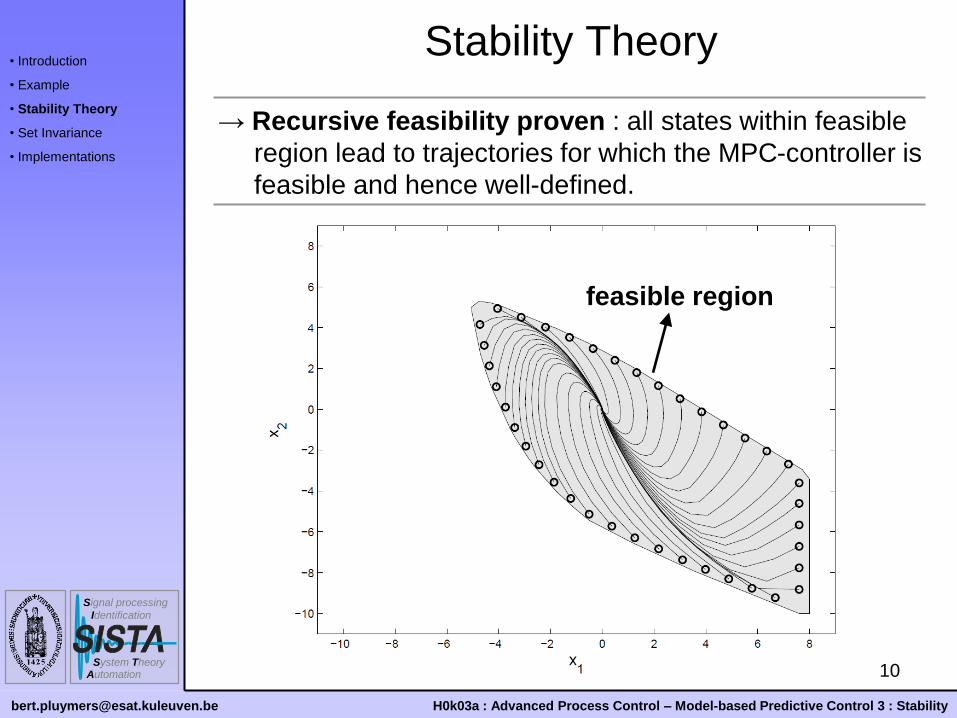
→ Recursive feasibility proven : all states within feasible
region lead to trajectories for which the MPC-controller is
feasible and hence well-defined.
10
Stability Theory
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
→ Recursive feasibility proven : all states within feasible
region lead to trajectories for which the MPC-controller is
feasible and hence well-defined.
feasible region
11
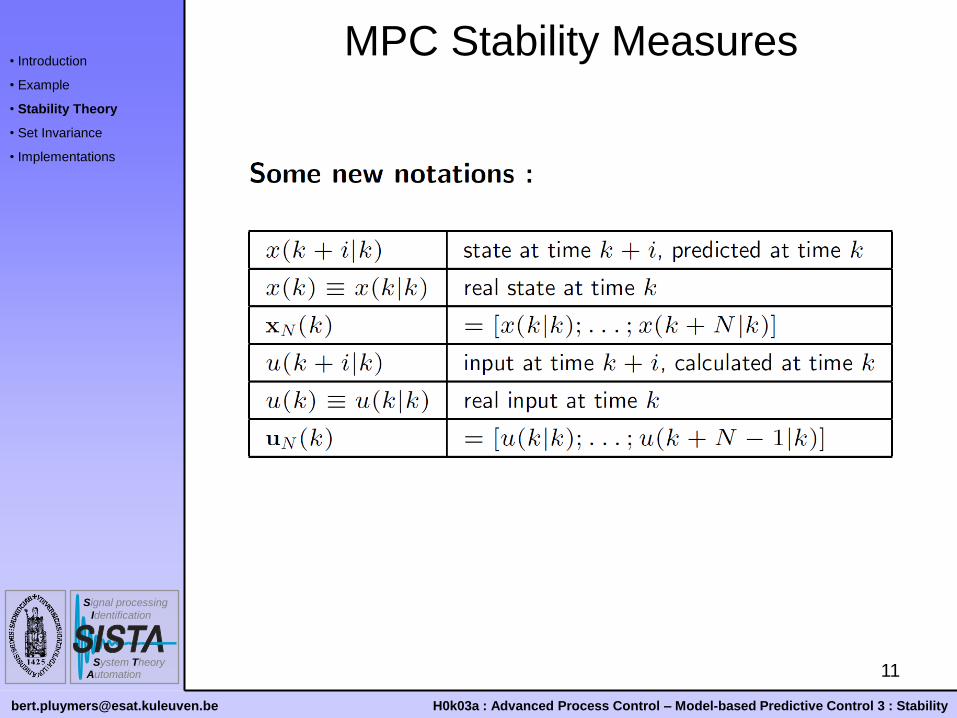
MPC Stability Measures
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]

12
MPC Stability Measures
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
recursive feasibility
(terminal constraint) Lyapunov stability
(terminal cost)
13
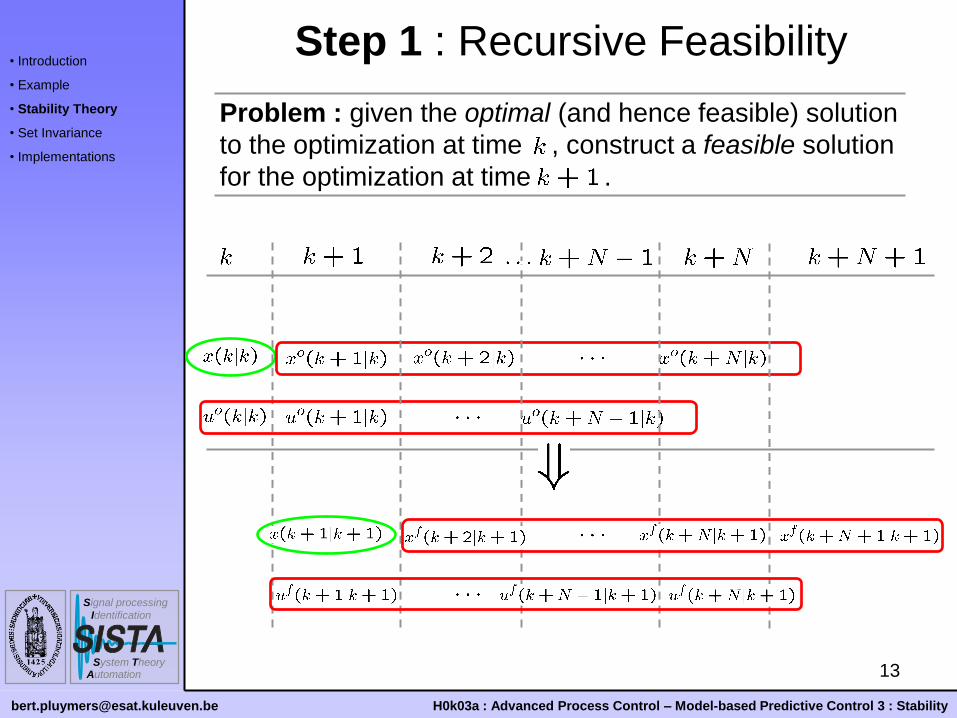
Step 1 : Recursive Feasibility
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
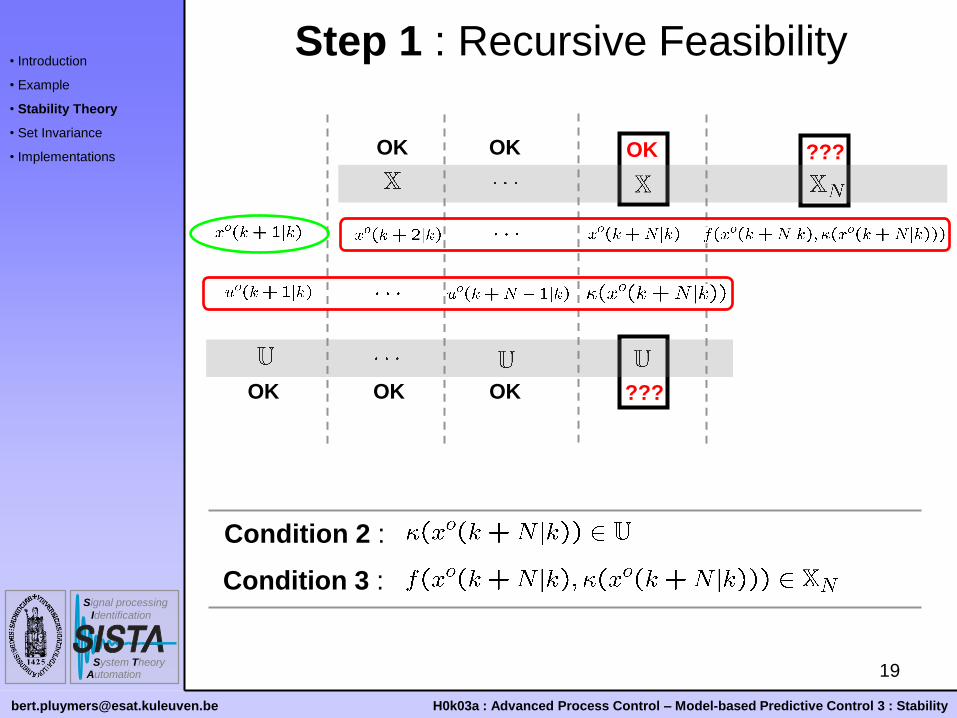
Problem : given the optimal (and hence feasible) solution
to the optimization at time , construct a feasible solution
for the optimization at time .

14
Step 1 : Recursive Feasibility
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
Given :
To be found :
Observe / Choose :
?

15
Step 1 : Recursive Feasibility
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
Plant state at time predicted at time :
Real plant state at time :
Assumption : No plant model mismatch, i.e.
Hence, reusing the overlapping part of the input sequence
will also result in an identical state sequence

16
Step 1 : Recursive Feasibility
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
OK OK
OK OK OK ???
??? ???
17
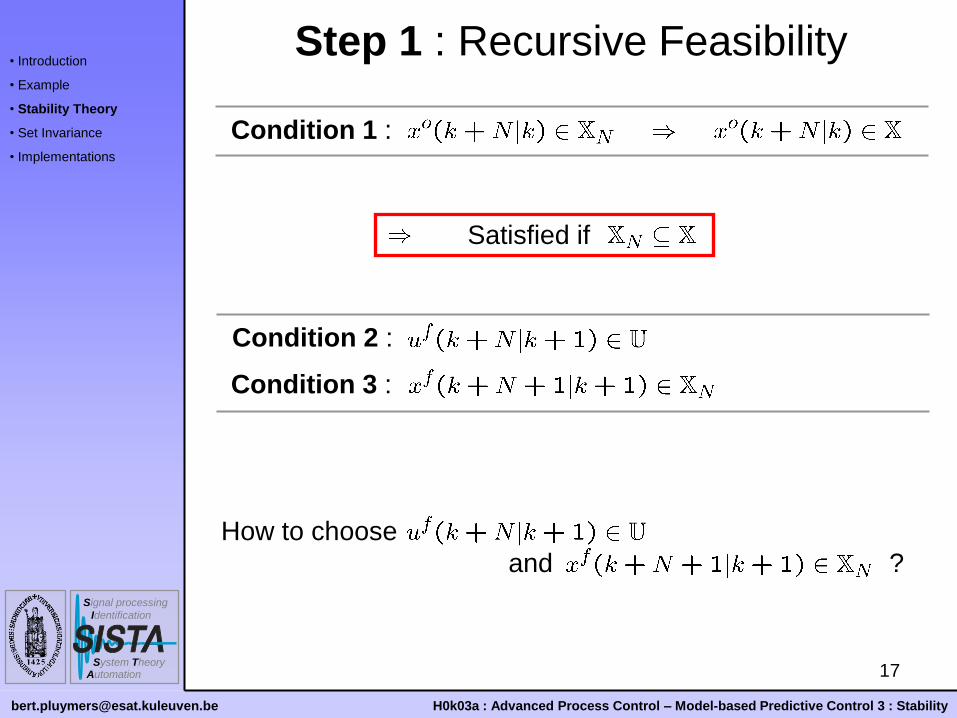
Step 1 : Recursive Feasibility
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
Condition 1 :
Satisfied if
Condition 2 :
Condition 3 :
How to choose
and ?
18
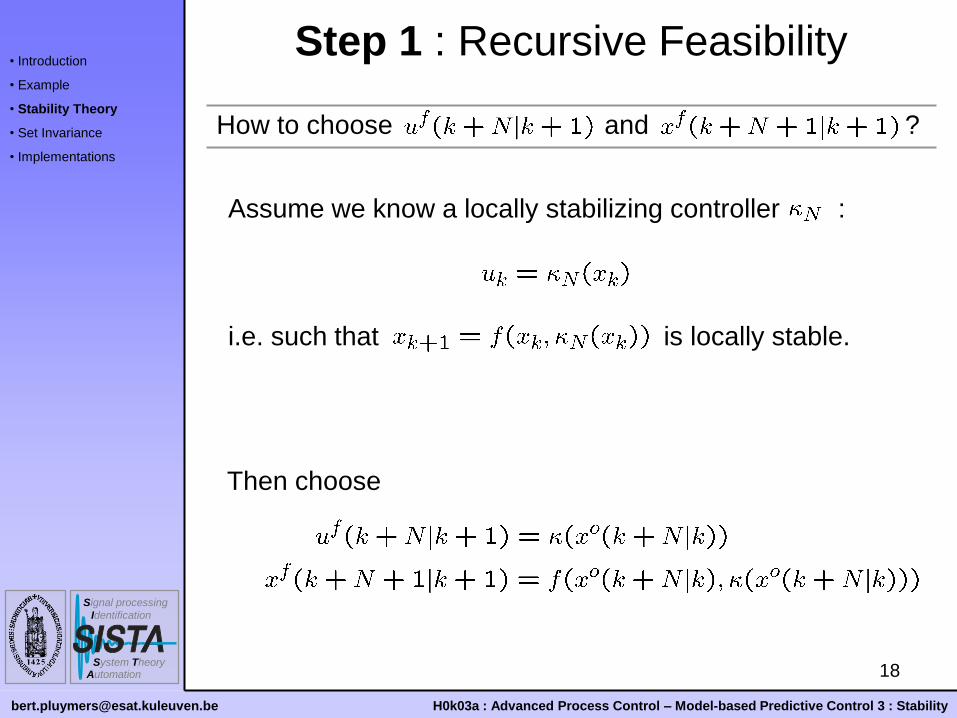
Step 1 : Recursive Feasibility
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
Assume we know a locally stabilizing controller :
i.e. such that is locally stable.
How to choose and ?
Then choose
19
Step 1 : Recursive Feasibility
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
OK OK
OK OK OK ???
OK ???
Condition 2 :
Condition 3 :

20
Step 1 : Recursive Feasibility
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
Condition 2 :
Condition 3 :
Since we know that …
Condition 2 is satisfied if
Condition 3 is satisfied if
21
Step 1 : Recursive Feasibility
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
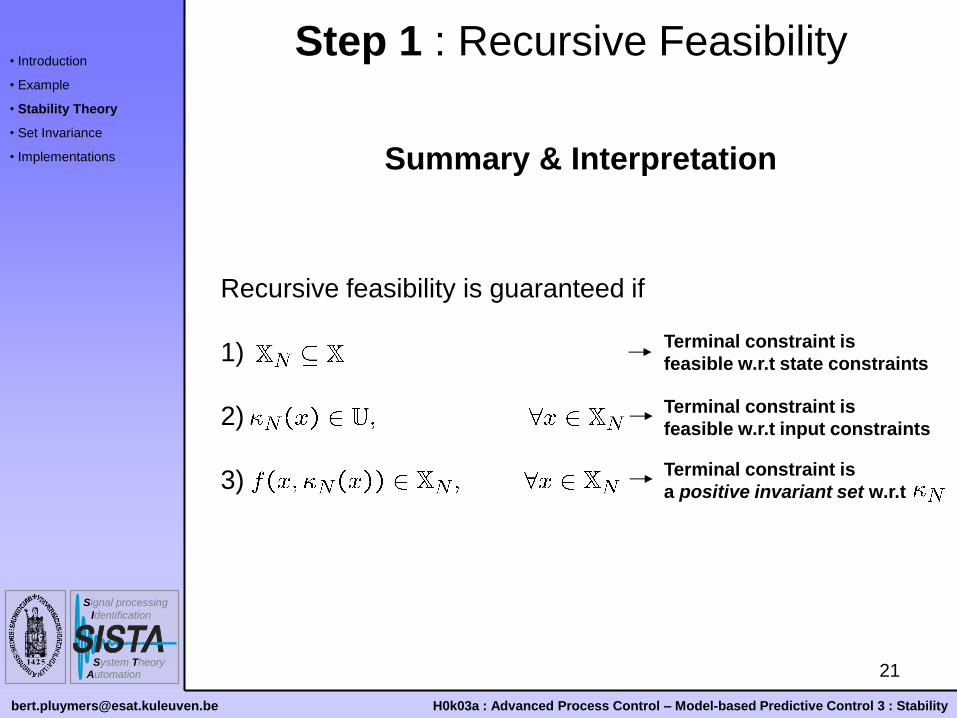
Summary & Interpretation
Recursive feasibility is guaranteed if
1)
2)
3)
Terminal constraint is
feasible w.r.t state constraints
Terminal constraint is
feasible w.r.t input constraints
Terminal constraint is
a positive invariant set w.r.t
22
Step 2 : Lyapunov stability
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
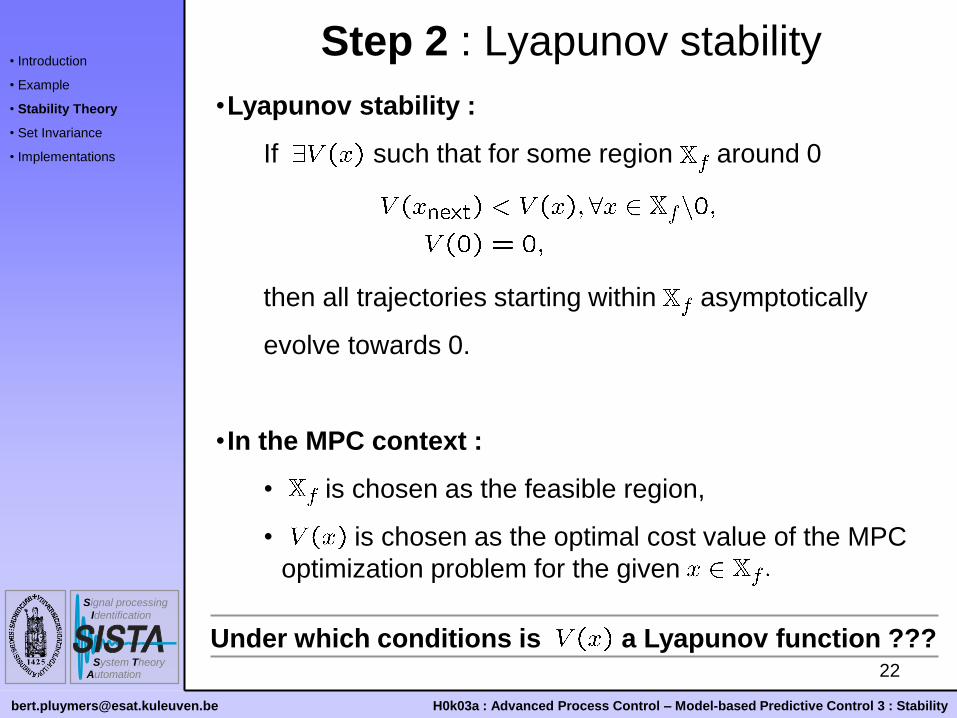
•Lyapunov stability :
If such that for some region around 0
then all trajectories starting within asymptotically
evolve towards 0.
• In the MPC context :
• is chosen as the feasible region,
• is chosen as the optimal cost value of the MPC
optimization problem for the given
Under which conditions is a Lyapunov function ???
23
Step 2 : Lyapunov stability
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
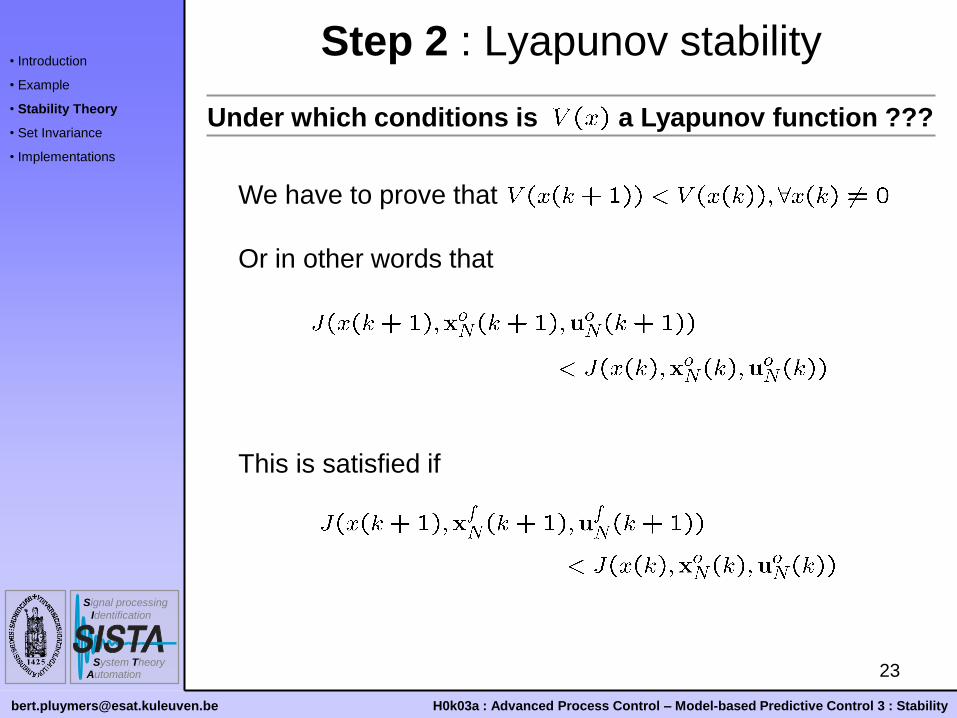
Under which conditions is a Lyapunov function ???
We have to prove that
Or in other words that
This is satisfied if

24
Step 2 : Lyapunov stability
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
Special relationship between the two cost expressions :
should be < 0
Satisfied if
Condition 4 :
25
Lyapunov inequality
i.e. should ‘overbound’ cost of terminal controller
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
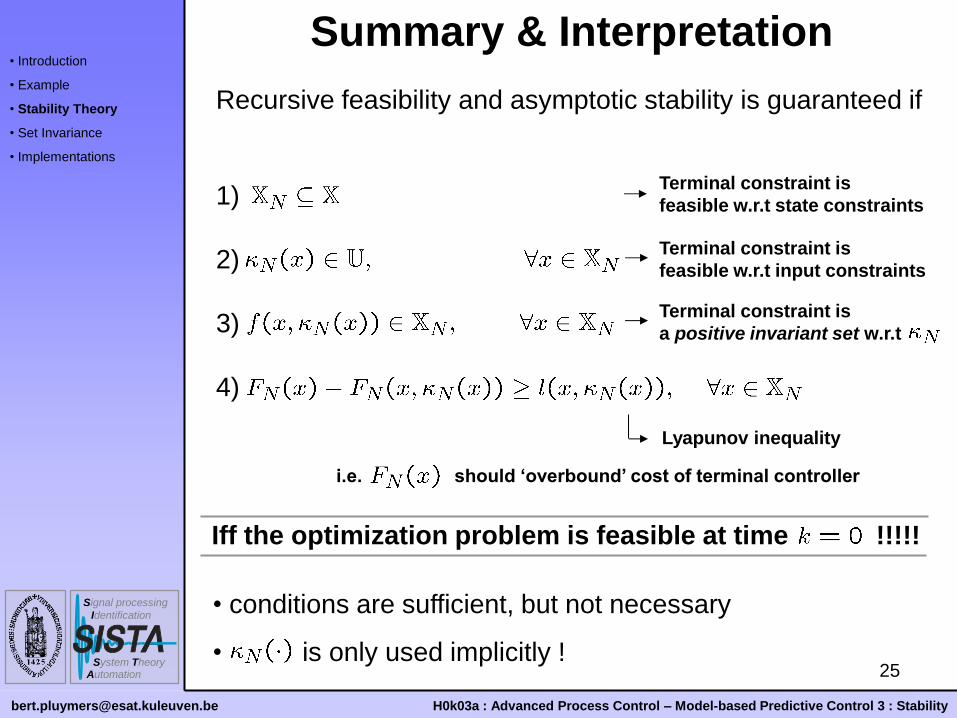
Recursive feasibility and asymptotic stability is guaranteed if
1)
2)
3)
4)
Terminal constraint is
feasible w.r.t state constraints
Terminal constraint is
feasible w.r.t input constraints
Terminal constraint is
a positive invariant set w.r.t
Summary & Interpretation
Iff the optimization problem is feasible at time !!!!!
• conditions are sufficient, but not necessary
• is only used implicitly !

26
Set Invariance
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
“Given an autonomous dynamical system, then a set is
(positive) invariant if it is guaranteed that if the current state
lies within , all future states will also lie within .”
-1.5 -1 -0.5 0 0.5 1 1.5-1.5
-1
-0.5
0
0.5
1
1.5
-1.5 -1 -0.5 0 0.5 1 1.5-1.5
-1
-0.5
0
0.5
1
1.5
not invariant invariant
27
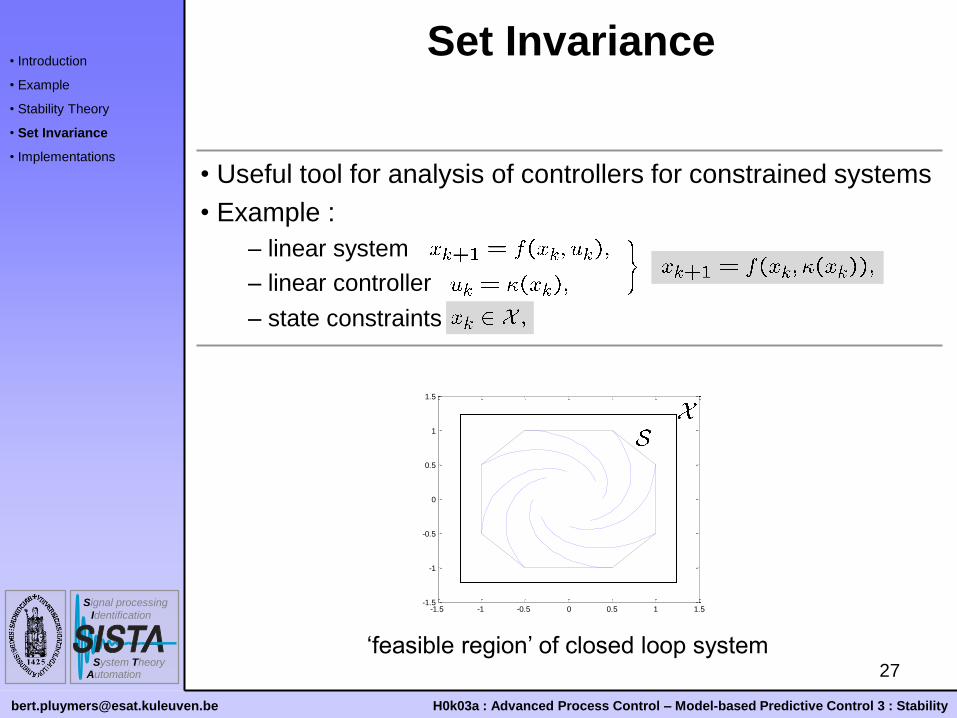
• Useful tool for analysis of controllers for constrained systems
• Example :
– linear system
– linear controller
Set Invariance
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
– state constraints
-1.5 -1 -0.5 0 0.5 1 1.5-1.5
-1
-0.5
0
0.5
1
1.5
‘feasible region’ of closed loop system

28
Consider an autonomous time-invariant system as
defined previously
A set is …
Set Invariance
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
… feasible iff
Problem :
Given an autonomous dynamical system subject to state
constraints, find the feasible invariant set of maximal size.
… invariant iff

29
Given an LTI system subject to linear constraints
then the largest size feasible invariant set can be found as
with a finite integer.
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
Given an LTI system subject to linear constraints
then the largest size feasible invariant set can be found as
with a finite integer.
• is constructed by simple forward prediction
• can be proven to be the largest feasible invariant set
• is called the Maximal Admissible Set (MAS)
• is constructed by simple forward prediction
• can be proven to be the largest feasible invariant set
• is called the Maximal Admissible Set (MAS)
Invariant sets for LTI systems (Gilbert et al.,1991, IEEE TAC)

30
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
Implementations
How to choose such that conditions are
satisfied ?
Different possibilities, depending of
• type of system (linear, non-linear)
• stability of the system
• presence of state constraints
• horizon length
• time constraints during design !

31
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
Implementations

32
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
Implementations

33
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
Implementations
2
1
34
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
Implementations
35
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
Implementations

36
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
Implementations

37
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
Implementations
Terminal constraint set determines feasible region

38
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
Implementations
Solid : standard MPC, dashed : terminal cost, constraint, dotted : terminal equality constr.

39
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
Conclusion
• stability of standard MPC not guaranteed
• pole/zero analysis impossible
• recursive feasibility
• Lyapunov stability
• general stability framework for stabilization problems
• different implementations
• stability measures allow the use of shorter horizons

40
• Introduction
• Example
• Stability Theory
• Set Invariance
• Implementations
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 3 : Stability [email protected]
References
Bert Pluymers
Prof. Bart De Moor
Katholieke Universiteit Leuven, Belgium
Faculty of Engineering Sciences
Department of Electrical Engineering (ESAT)
Research Group SCD-SISTA
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
H0K03a : Advanced Process Control Model-based Predictive Control 4 : Robustness

1
Overview
• Example
• Robustness
• Robust MPC
• Conclusion
Lecture 4 : Robustness
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
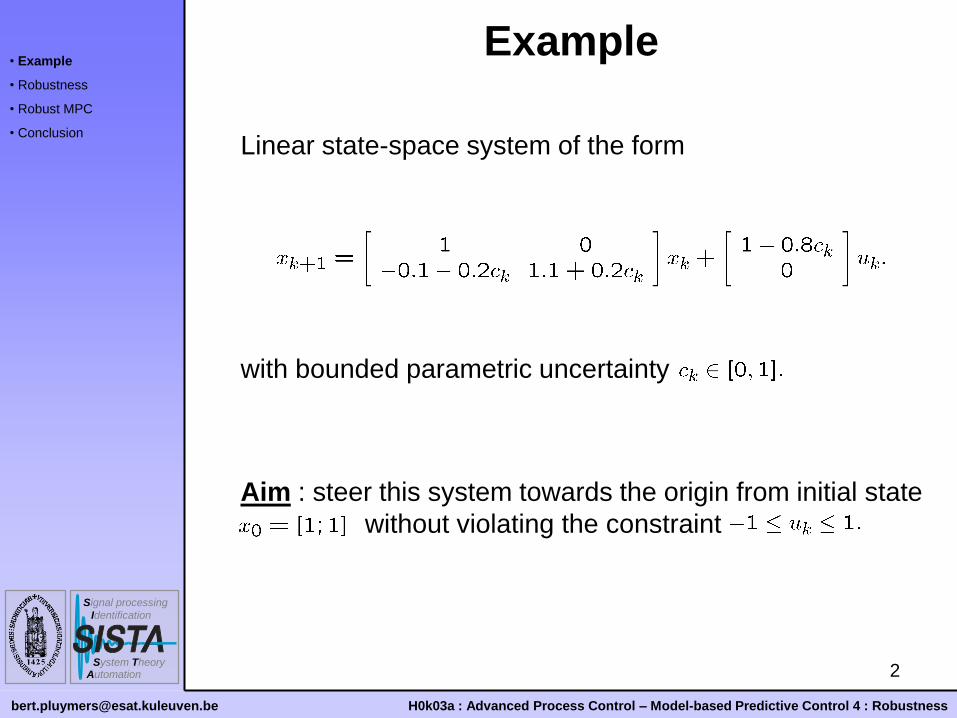
2
Example
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Linear state-space system of the form
with bounded parametric uncertainty
Aim : steer this system towards the origin from initial state
without violating the constraint
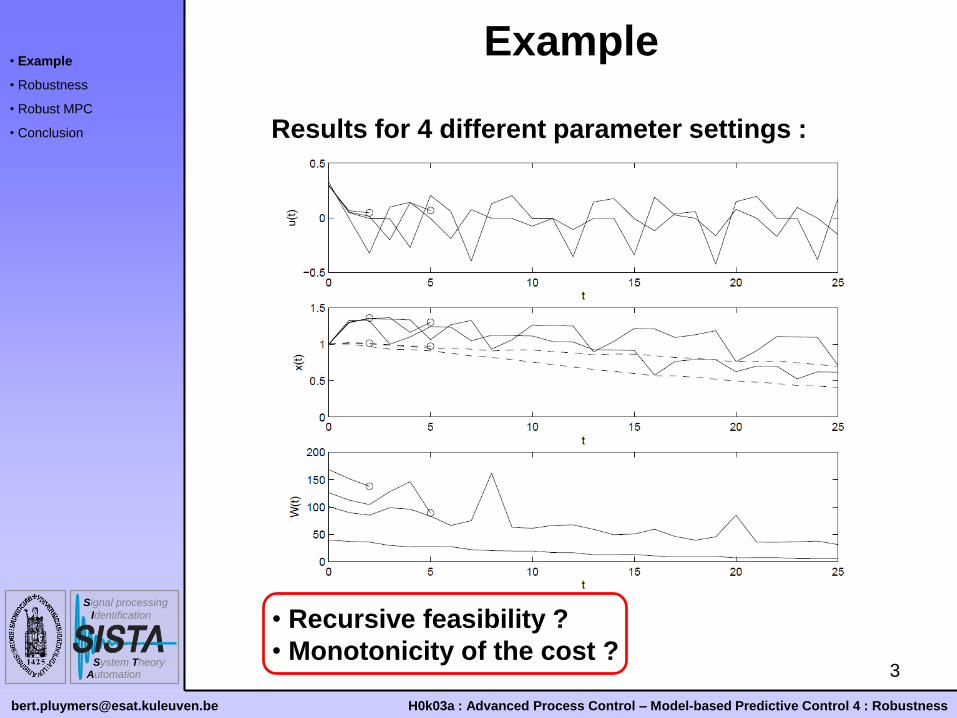
3
Example
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Results for 4 different parameter settings :
• Recursive feasibility ?
• Monotonicity of the cost ?

4
Robustness
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Robust with respect to what ?
• Disturbances
• Model uncertainty
Cause predictions of
‘nominal’ MPC to be inaccurate
5
Robustness
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Main aims :
• Keep recursive feasibility properties, despite model errors,
disturbances
• Keep asymptotic stability (in the case without disturbances)
We need to have an idea about …
• the size of the model uncertainty
• the size of the disturbances

6
Uncertain Models
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Linear Parameter-Varying state space models with
polytopic uncertainty description

7
Uncertain Models
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Linear Parameter-Varying state space models with
norm-bounded uncertainty description

8
Bounded Disturbances
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
• Typically bounded by a polytope :
• Can be described in two ways
•
•
• Trivial condition for well-posedness :
9
Robust MPC
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Main aims :
• Keep recursive feasibility properties, despite model errors,
disturbances
• Keep asymptotic stability (in the case without disturbances)
Necessary modifications :
•Uncertain predictions (e.g predictions with all models within
uncertainty region)
• worst-case constraint satisfaction over all predictions
• worst-case cost over all predictions
•Terminal cost has to satisfy multiple Lyap. Ineq.
•Terminal constraint has to be a robust invariant set
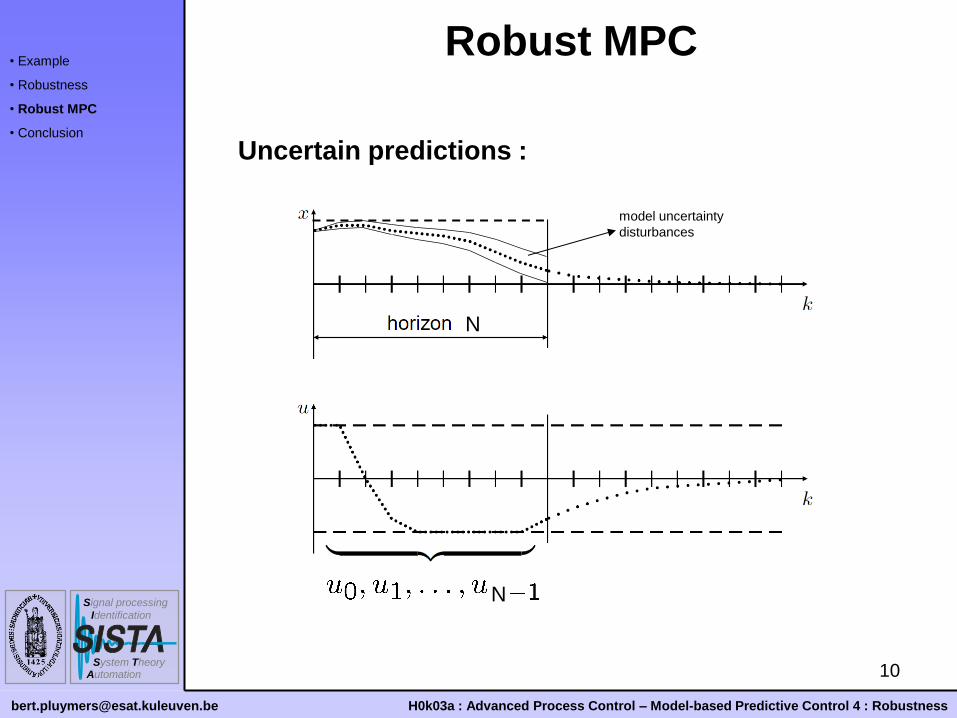
10
Robust MPC
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
model uncertainty
disturbances
Uncertain predictions :
N
N

11
Uncertain Predictions
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Step 1) Robust Constraint Satisfaction
Result : Sufficient to impose constraint only for vert. of :
Observations :
• depends linearly on
• is a convex polytopic set
• is a convex set
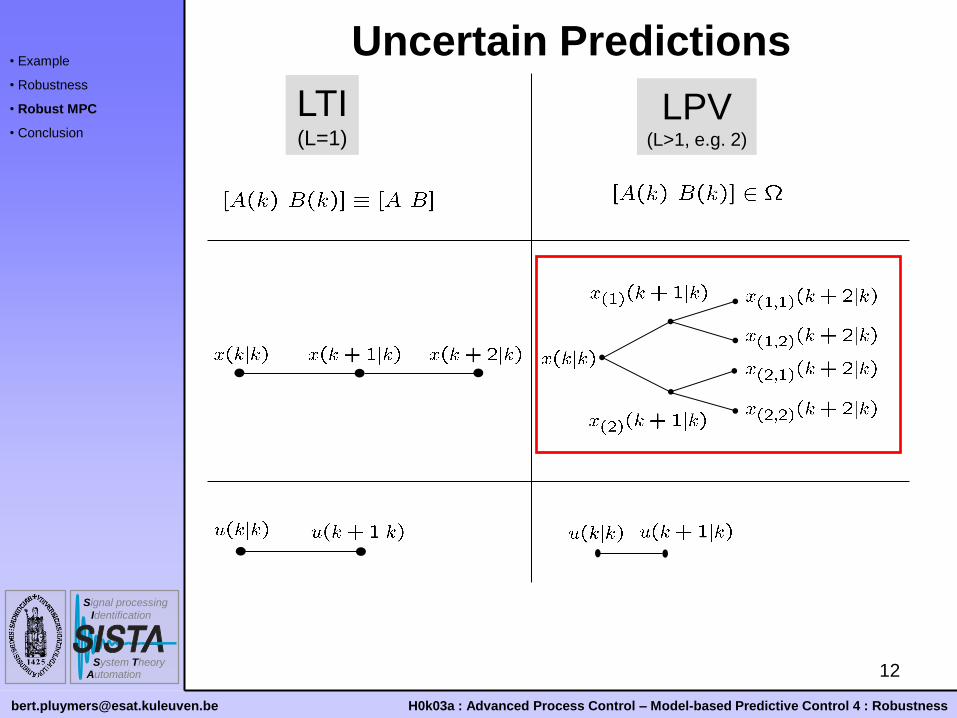
12
Uncertain Predictions
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
LTI (L=1)
LPV (L>1, e.g. 2)
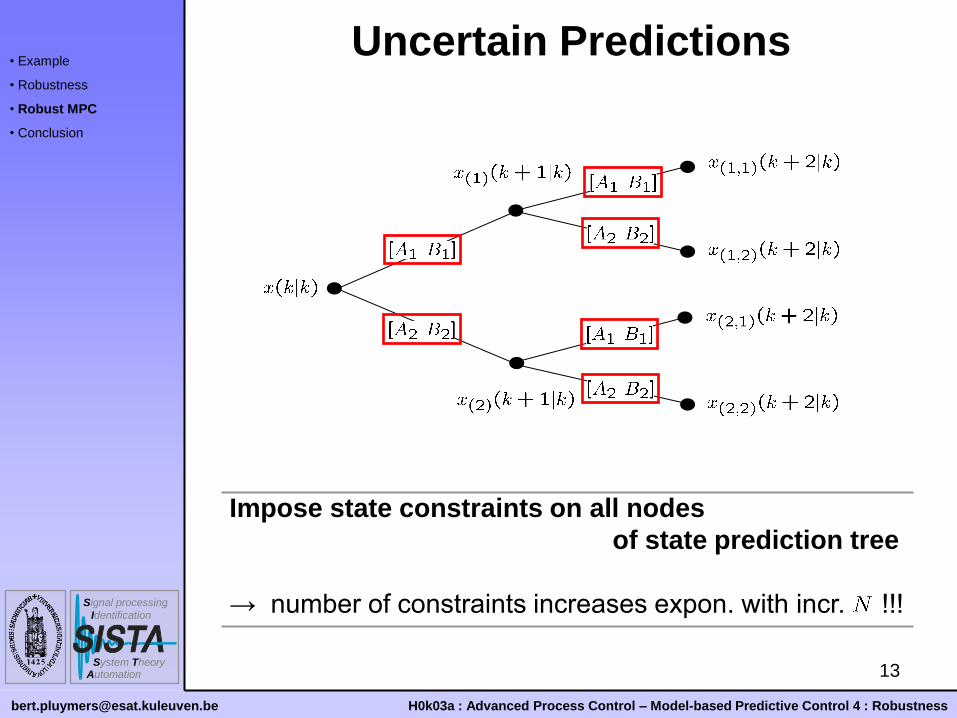
13
Uncertain Predictions
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Impose state constraints on all nodes
of state prediction tree
→ number of constraints increases expon. with incr. !!!

14
Worst-Case Cost Objective
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Step 2) Worst-Case cost minimization
Observations :
• depends linearly on
• is a convex polytopic set
• cost function typically convex function of
→ Also for objective function sufficient to make
predictions only with vertices of uncertainty polytope
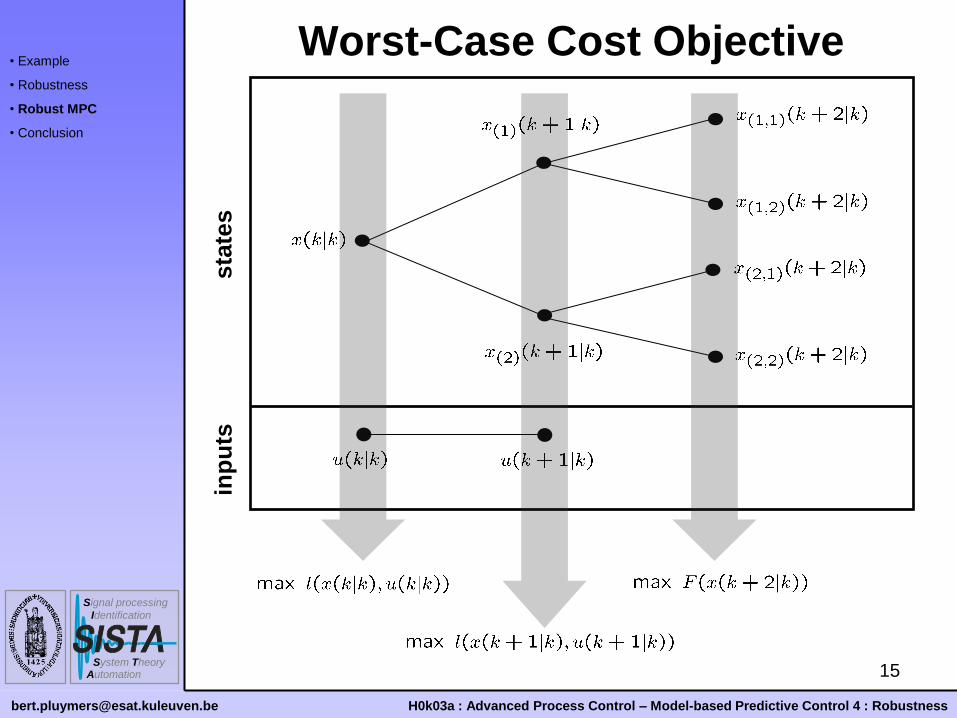
15
Worst-Case Cost Objective
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
sta
tes
inp
uts

16
Worst-Case Cost Objective (1-norm)
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
LP
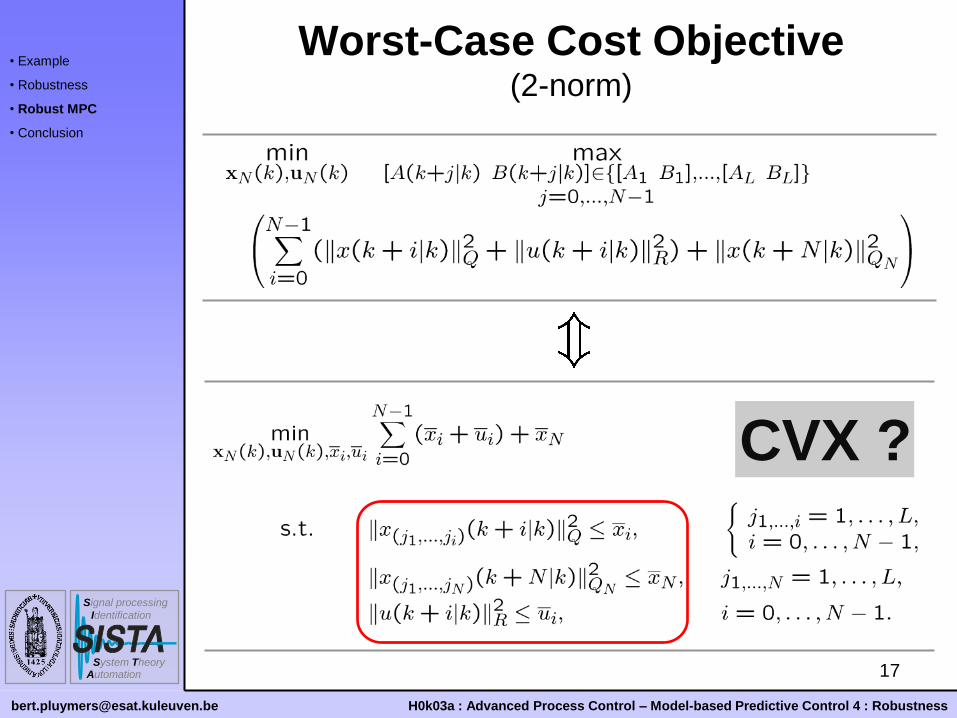
17
Worst-Case Cost Objective (2-norm)
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
CVX ?
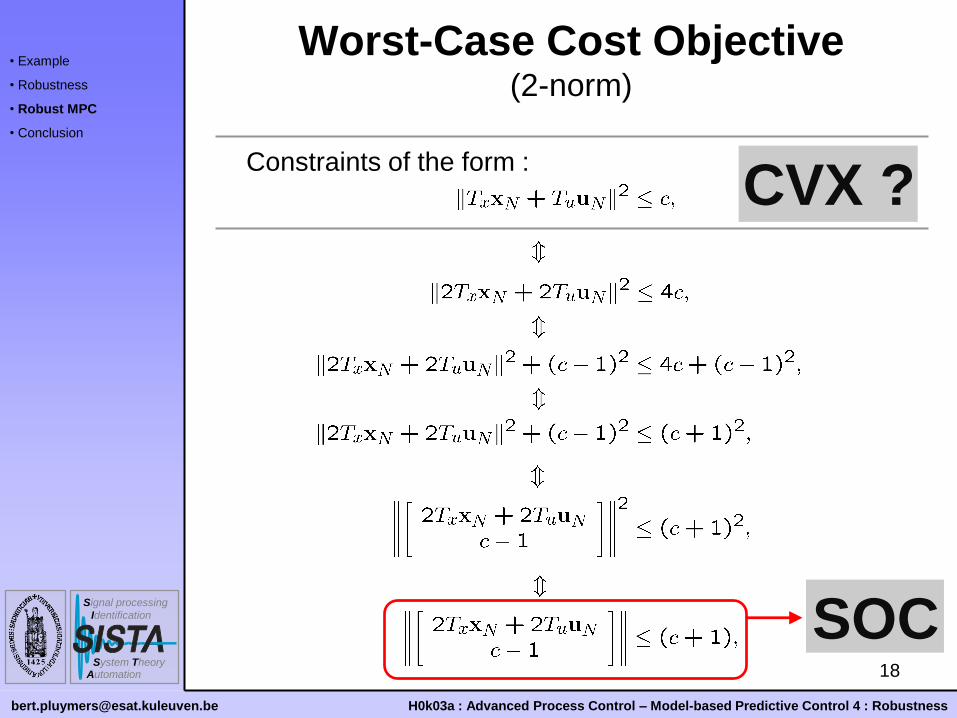
18
Worst-Case Cost Objective (2-norm)
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Constraints of the form :
SOC
CVX ?

19
Worst-Case Cost Objective (2-norm)
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
SOCP
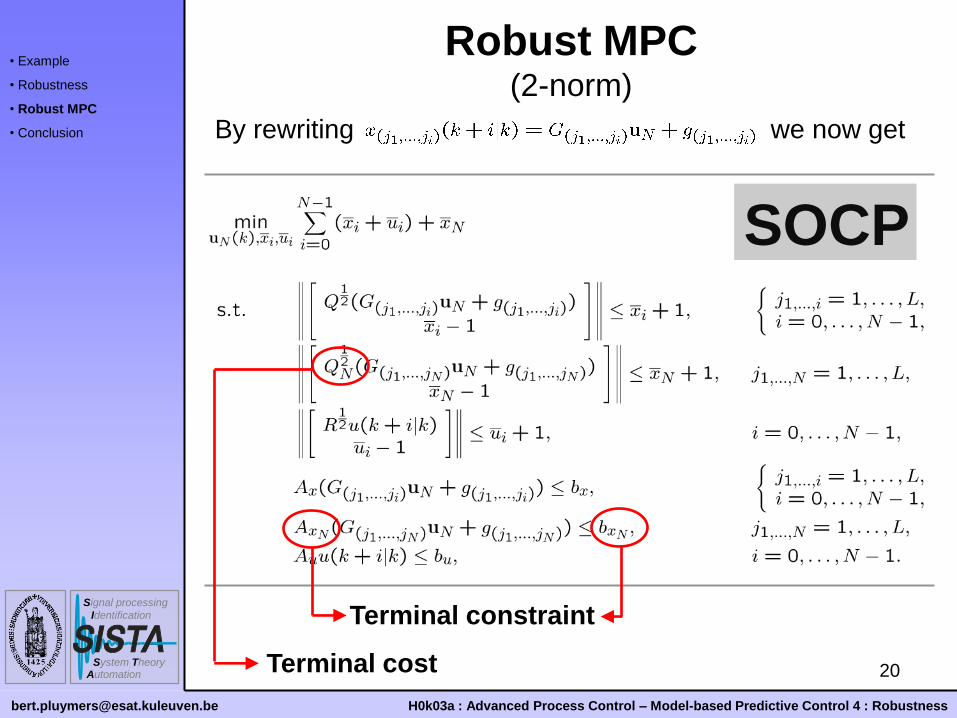
20
Robust MPC (2-norm)
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
SOCP
By rewriting we now get
Terminal cost
Terminal constraint

21
Robust Terminal Cost
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
“non-robust” stability condition for terminal cost:
In case of…
• LPV system with polytopic uncertainty
• linear feedback controller
• quadratic cost criterion
• quadratic terminal cost
… this becomes :
or equivalent :
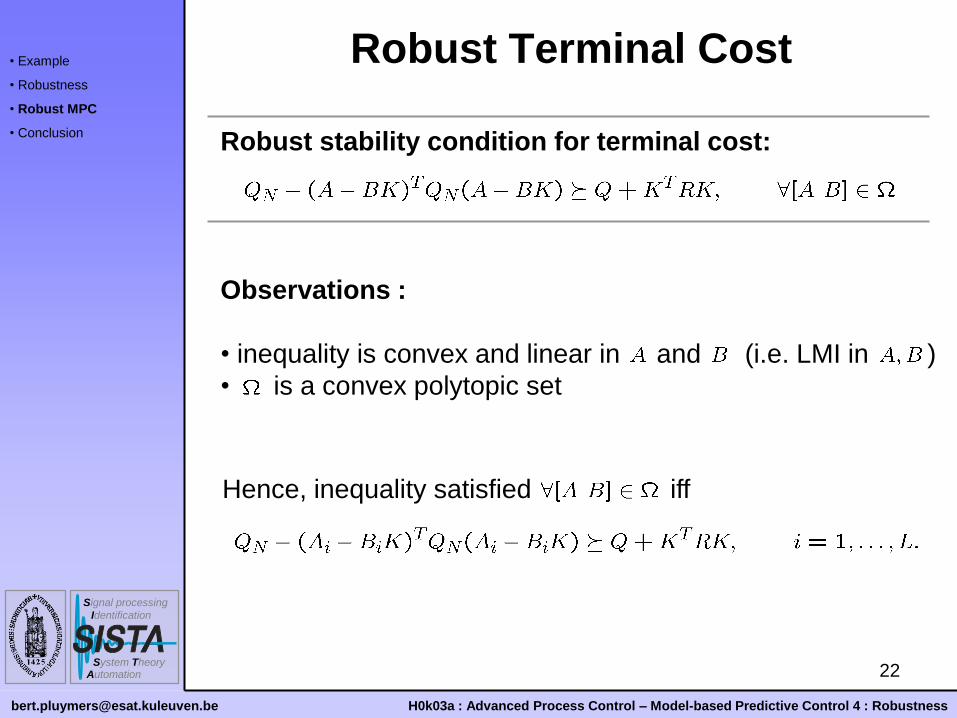
22
Robust Terminal Cost
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Robust stability condition for terminal cost:
Observations :
• inequality is convex and linear in and (i.e. LMI in )
• is a convex polytopic set
Hence, inequality satisfied iff
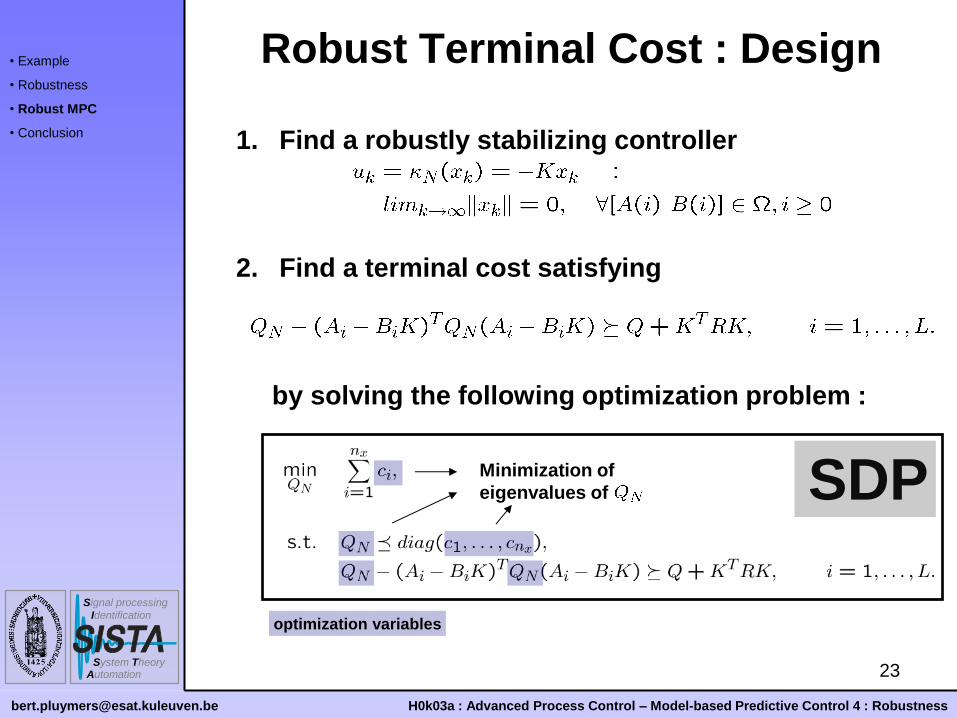
23
Robust Terminal Cost : Design
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
1. Find a robustly stabilizing controller
2. Find a terminal cost satisfying
by solving the following optimization problem :
SDP
optimization variables
Minimization of
eigenvalues of
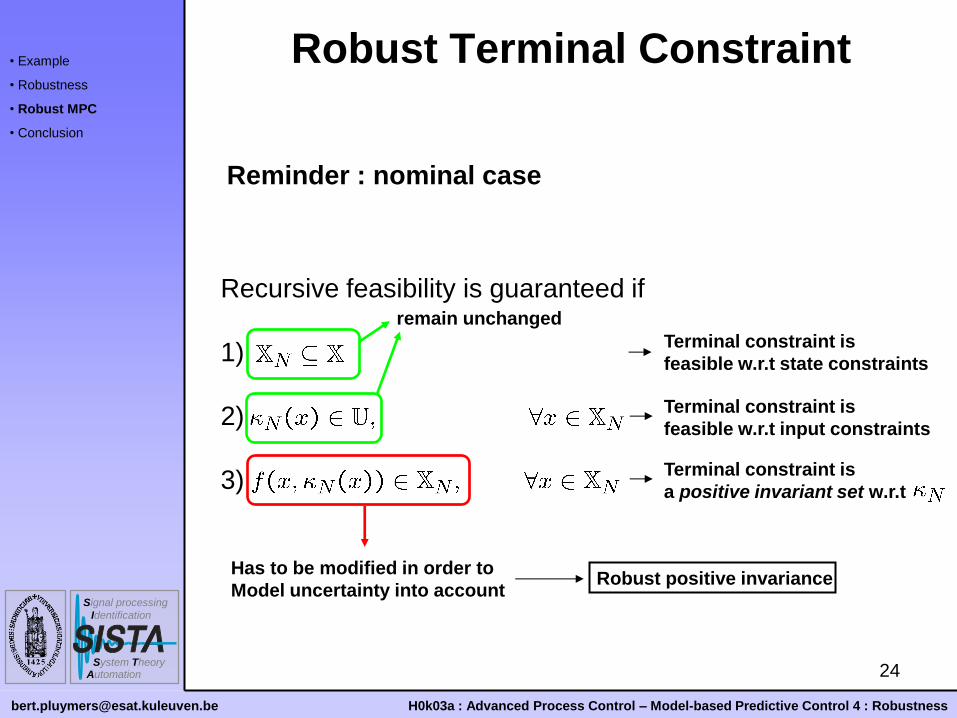
24
Robust Terminal Constraint
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Recursive feasibility is guaranteed if
1)
2)
3)
Terminal constraint is
feasible w.r.t state constraints
Terminal constraint is
feasible w.r.t input constraints
Terminal constraint is
a positive invariant set w.r.t
Reminder : nominal case
remain unchanged
Has to be modified in order to
Model uncertainty into account Robust positive invariance

25
Robust Terminal Constraint
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Consider linear terminal controller ,
then the resulting closed loop system is :
Robust positive invariance :
Again : sufficient to satisfy inclusion

26
Robust Terminal Constraint
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Reminder : invariant sets for LTI systems
Given an LTI system subject to linear constraints
then the largest size feasible invariant set can be found as
with a finite integer.
Given an LTI system subject to linear constraints
then the largest size feasible invariant set can be found as
with a finite integer.
Comes down to making forward predictions using

27
Robust Terminal Constraint
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
LTI (L=1,n=2)
LPV (L>1, e.g. 2, n=2)

28
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
S X
• Constructed by solving semi-definite program (SDP)
• Conservative with respect to constraints
Ellipsoidal invariant sets for LPV systems
(Kothare et al.,1996, Automatica)
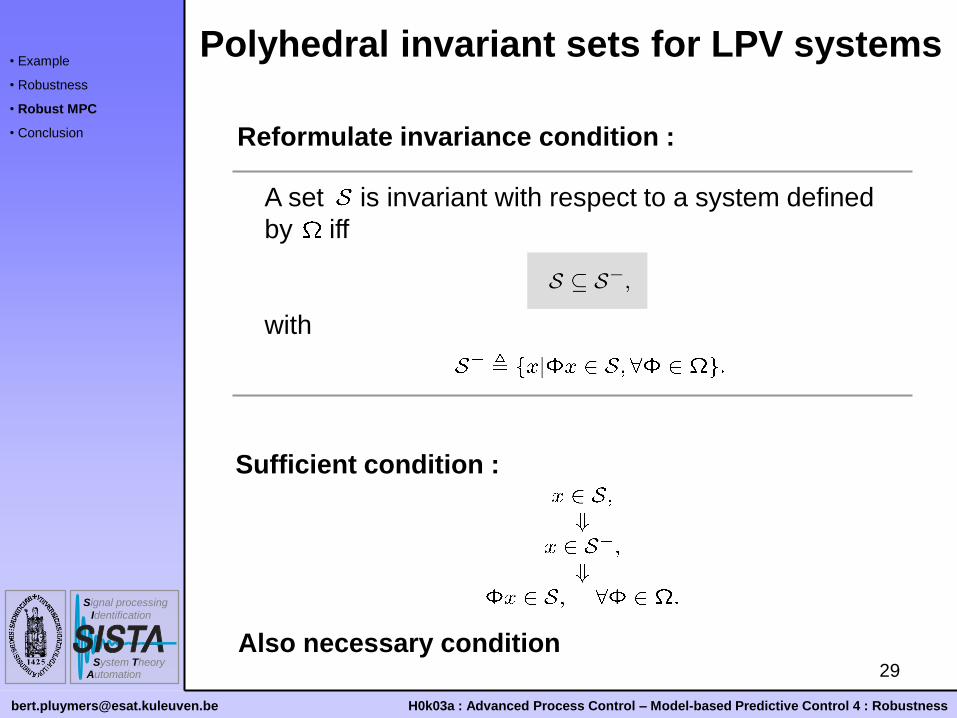
29
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Polyhedral invariant sets for LPV systems
A set is invariant with respect to a system defined
by iff
with
Reformulate invariance condition :
Sufficient condition :
Also necessary condition
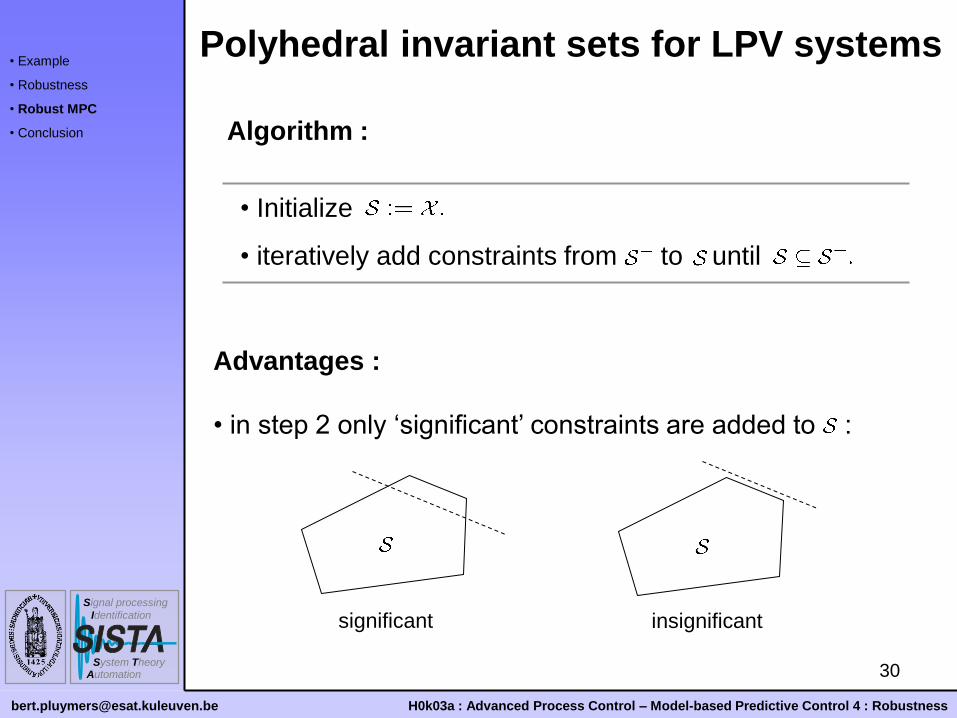
30
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Polyhedral invariant sets for LPV systems
Advantages :
• in step 2 only ‘significant’ constraints are added to :
significant insignificant
• Initialize
• iteratively add constraints from to until
Algorithm :

31
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Polyhedral invariant sets for LPV systems
Algorithm :
Advantages :
• prediction tree never explicitly constructed
• given a polyhedral set , it is straightforward
to calculate :
• Initialize
• iteratively add constraints from to until

32
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Polyhedral invariant sets for LPV systems
Example
Initialization

33
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Polyhedral invariant sets for LPV systems
Example
Iteration 10
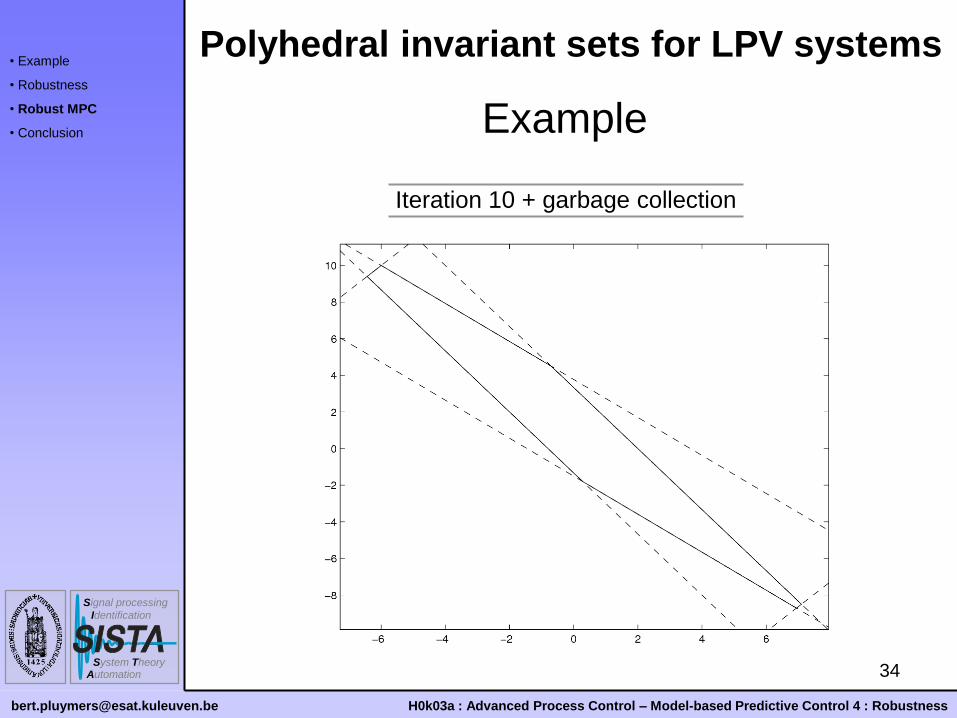
34
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Polyhedral invariant sets for LPV systems
Example
Iteration 10 + garbage collection

35
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Polyhedral invariant sets for LPV systems
Example
Iteration 20

36
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Polyhedral invariant sets for LPV systems
Example
Final Result

37
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Polyhedral invariant sets for LPV systems
Example
Final Result
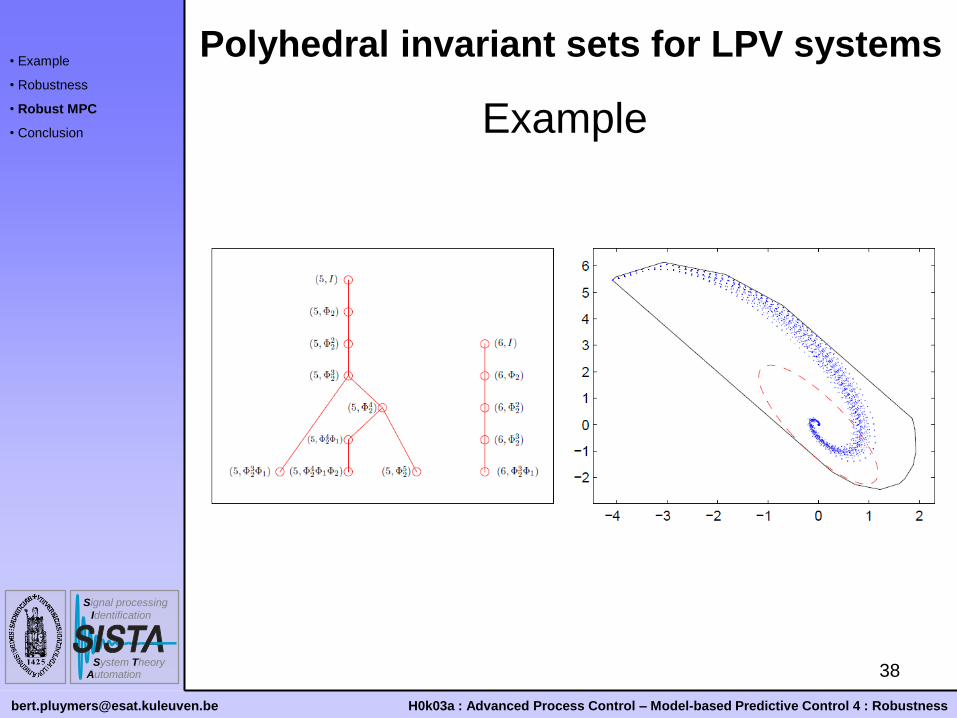
38
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Polyhedral invariant sets for LPV systems
Example
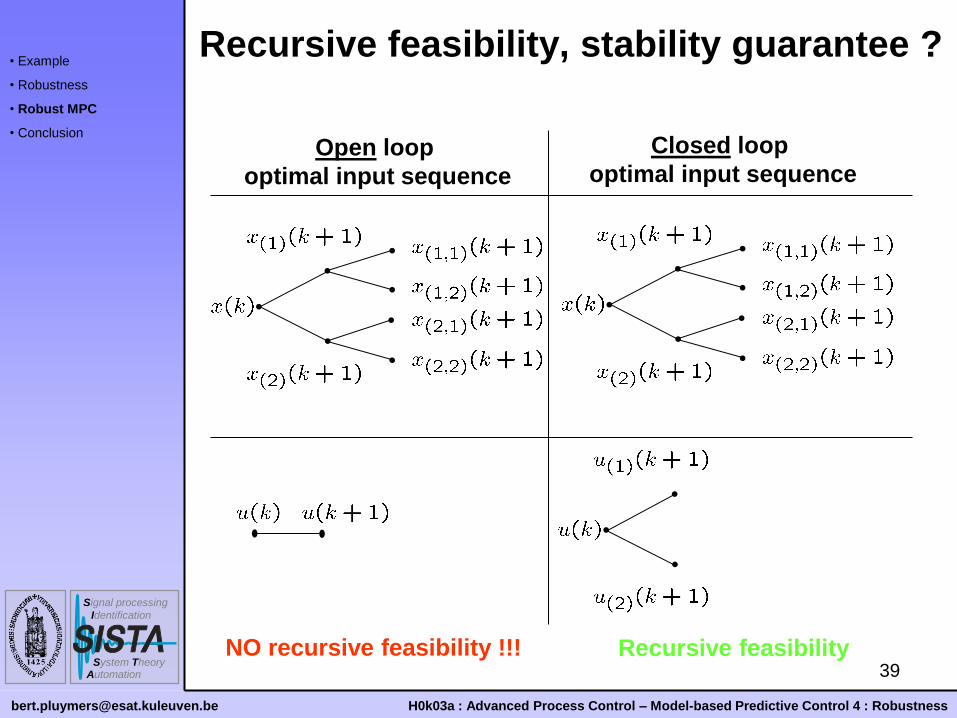
39
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Recursive feasibility, stability guarantee ?
Open loop
optimal input sequence
Closed loop
optimal input sequence
NO recursive feasibility !!! Recursive feasibility

40
Example revisited…
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Results for 4 different parameter settings :
• Recursive feasibility ?
• Monotonicity of the cost ?

41
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Example revisited…
42
• Example
• Robustness
• Robust MPC
• Conclusion
Signal processing
Identification
System Theory Automation
H0k03a : Advanced Process Control – Model-based Predictive Control 4 : Robustness [email protected]
Conclusion
• Robustness w.r.t a) bounded model uncertainty
b) bounded disturbances
• necessary modifications :
• worst-case constraints satisfaction
• worst-case objective function
• terminal cost
• terminal constraint
• “open-loop” vs. “closed-loop” predictions
→ currently hot research topic !
• convex optimization but problem size impractical
→ currently hot research topic !