Introduction to Earthquake Engineering - uni-kassel.de · From Clough, Penzien (3) ... Clough,...
28
Introduction to Earthquake Engineering Response Analysis Prof. Dr.-Ing. Uwe E. Dorka Stand: September 2013
Transcript of Introduction to Earthquake Engineering - uni-kassel.de · From Clough, Penzien (3) ... Clough,...
Introduction to
Earthquake Engineering
Response Analysis
Prof. Dr.-Ing. Uwe E. Dorka
Stand: September 2013
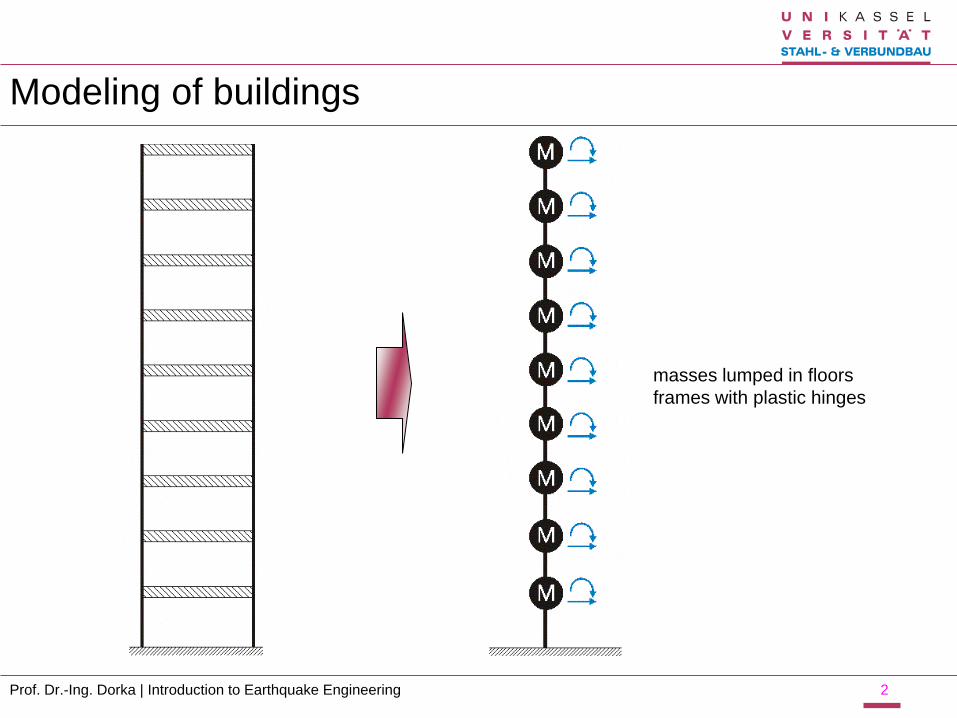
Modeling of buildings
Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 2
masses lumped in floors
frames with plastic hinges
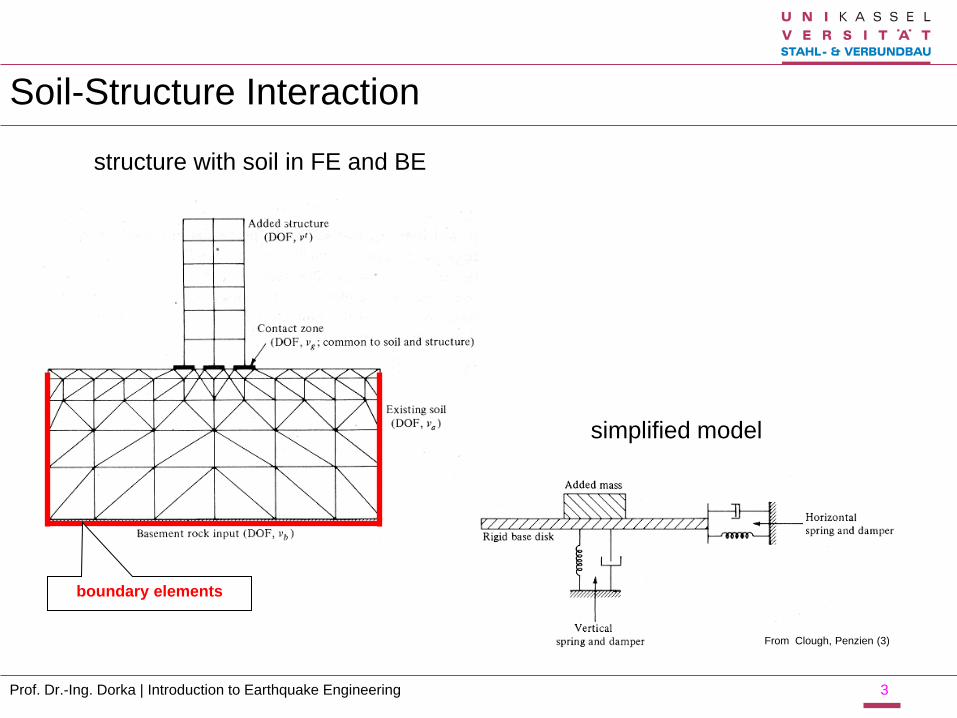
Soil-Structure Interaction
Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 3
structure with soil in FE and BE
simplified model
boundary elements
From Clough, Penzien (3)

Modeling of bridges
Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 4
superstructure, bearings and columns with FE
multiple base input
with D1=D2=5% yields w1=100.06 and w2=429.44
a = 0.520752958
b = 0.00325458
Rayleigh-damping:
C M Ka b w w
a w ww w
1 1 2 21 2 2 2
1 2
D D2
w w b
w w
1 2 1 2
2 2
1 2
2 D D
130
95
91
86
51
46
133
5
12
3
z20
y19133
z18
y17130
y16
x1595
y14
x1391
y12
x1186
z10
y951
z8
y746
y6
x512
y4
x35
y2
x13
DOFmaster
node
z20
y19133
z18
y17130
y16
x1595
y14
x1391
y12
x1186
z10
y951
z8
y746
y6
x512
y4
x35
y2
x13
DOFmaster
node
Model with 20 dynamic DOFs
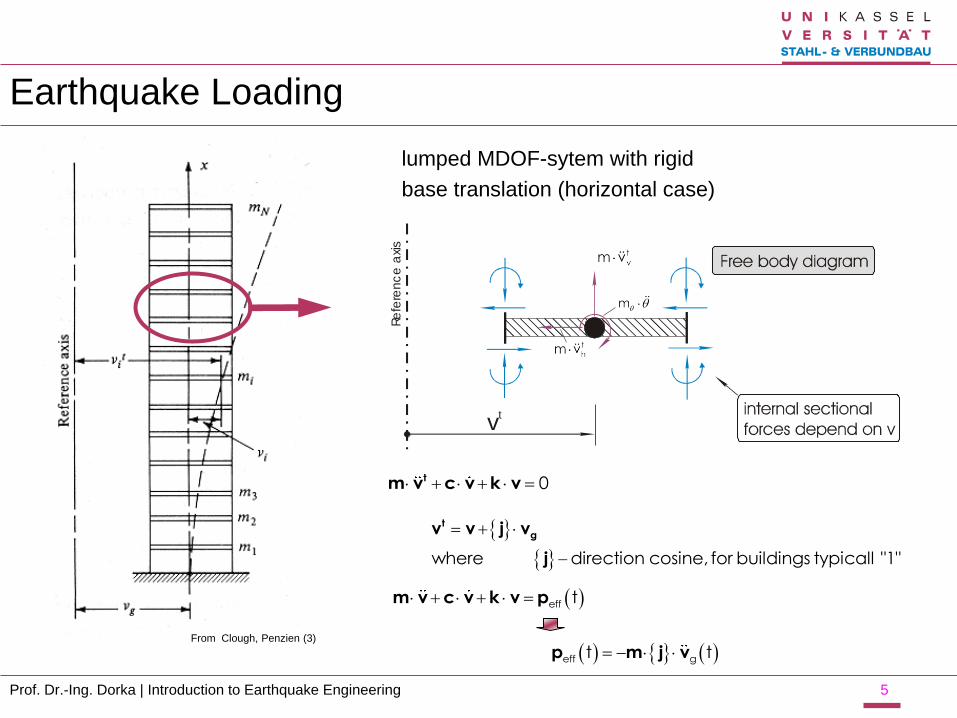
Earthquake Loading
Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 5
lumped MDOF-sytem with rigid
base translation (horizontal case)
From Clough, Penzien (3)
0tm v c v k v
where direction cosine, for buildings typicall "1"
t
gv v j v
j
eff tm v c v k v p
eff gt tp m j v
Re
fere
nc
e a
xis
vt
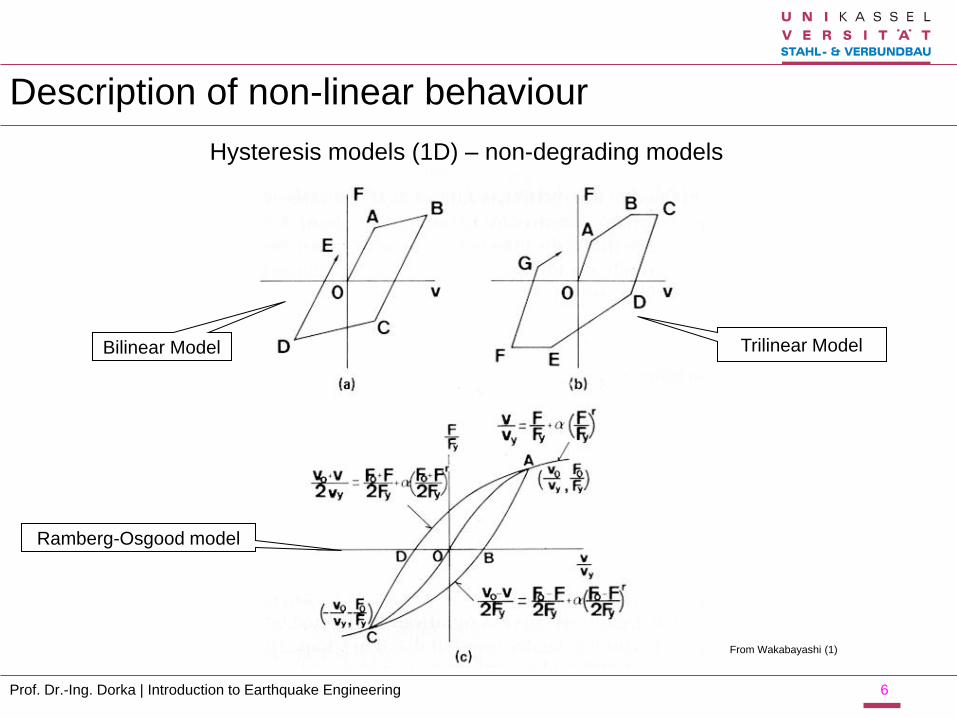
Description of non-linear behaviour
Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 6
Hysteresis models (1D) – non-degrading models
From Wakabayashi (1)
Bilinear Model Trilinear Model
Ramberg-Osgood model
Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 7
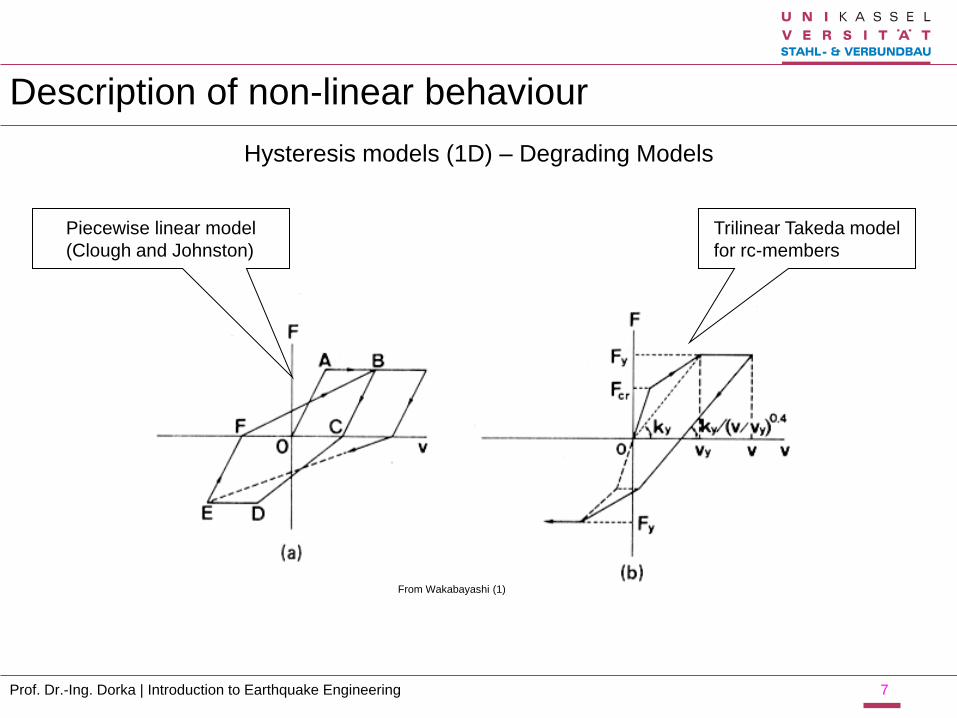
Hysteresis models (1D) – Degrading Models
From Wakabayashi (1)
Piecewise linear model
(Clough and Johnston)
Trilinear Takeda model
for rc-members
Description of non-linear behaviour

Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 8
Description of non-linear behaviour
Hysteresis models (1D) – Slip-Type Models
From Wakabayashi (1)
Double bilinear model by
Tanabashi and Kaneta Slip-type model

Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 9
Description of non-linear behaviour
Example for slip-type hysteresis model
(friction connection with multiple stops)
Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 10
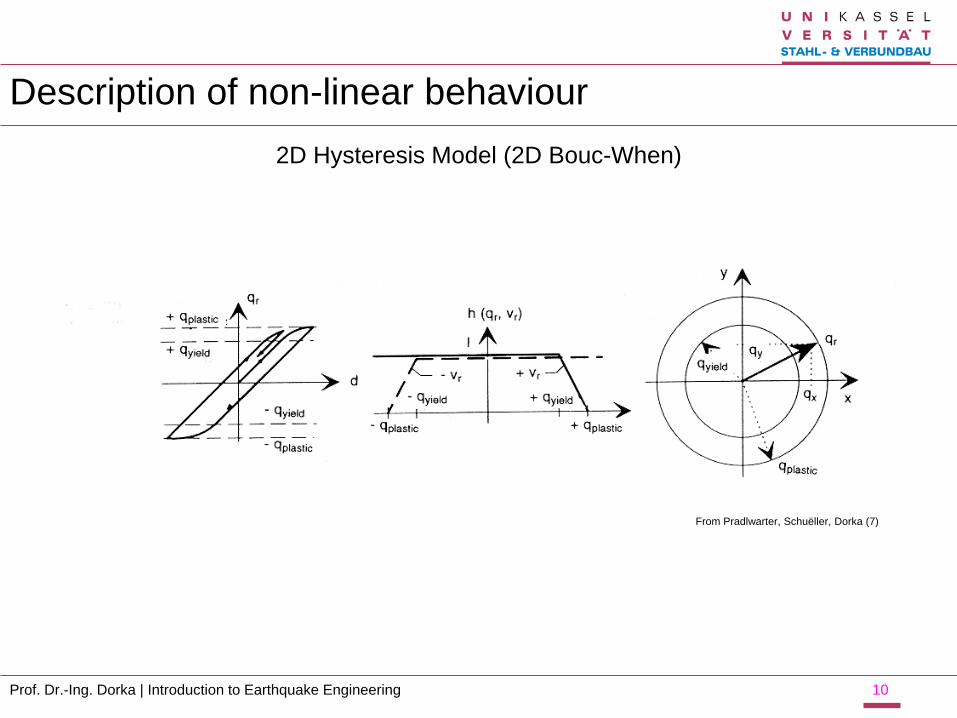
Description of non-linear behaviour
2D Hysteresis Model (2D Bouc-When)
From Pradlwarter, Schuëller, Dorka (7)

Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 11
Time History Analysis
)(2
2
tpfKxxCxM rdtd
dt
d
2/1
;11
;2/1
1
1
n
n
n
N
N
N
Dynamic equilibrium:
with fr : vector of non-linear restoring
forces Shape functions for discretizing x in time:
Time Discretization
with:
tt /

Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 12
Weighted Residual Formulation
d
NfNfNf
NuNuNuK
NuNuNuC
NuNuNuM
W
n
n
n
n
n
n
n
n
n
n
n
n
ndtdn
ndtdn
ndtdn
ndt
dn
ndt
dn
ndt
dn
1
1
**1
1
*
1
1
1
1
1
1
1
1
1
1
1
1
1
1
2
2
2
2
2
2
pff r *
;1
;
1
1
1
1
21
1
1
1
1
21
b
WddW
WddW
Weighting function W:
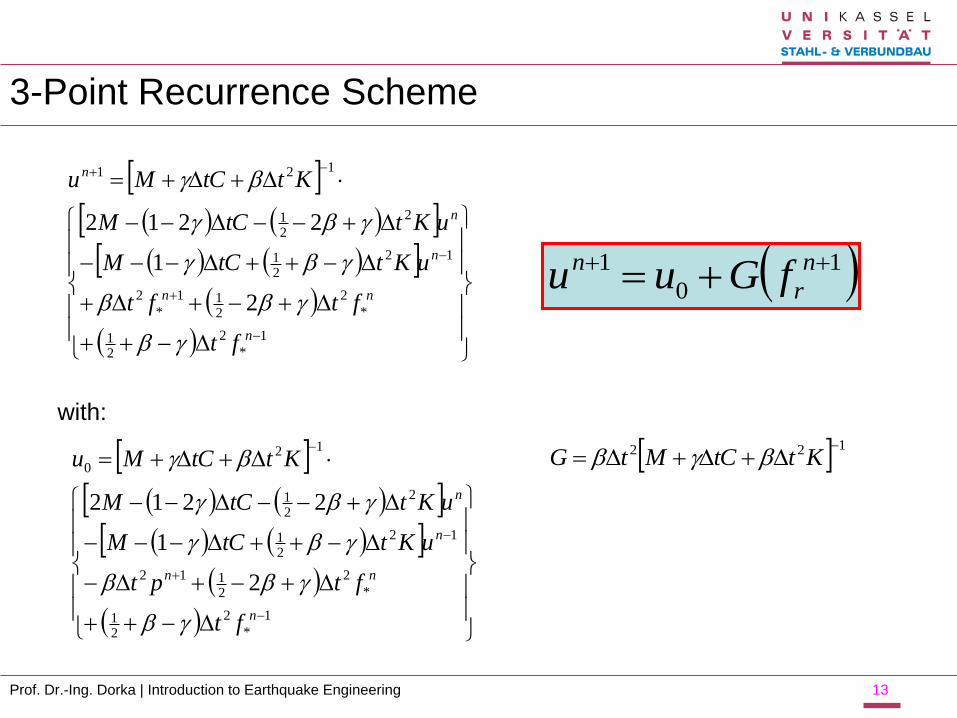
3-Point Recurrence Scheme
Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 13
1
*
2
21
*
2
211
*
2
12
21
2
21
121
2
1
2212
n
nn
n
n
n
ft
ftft
uKttCM
uKttCM
KttCMu
b
bb
b
b
b
1
0
1 n
r
n fGuu
1
*
2
21
*
2
2112
12
21
2
21
12
0
2
1
2212
n
nn
n
n
ft
ftpt
uKttCM
uKttCM
KttCMu
b
bb
b
b
b 122 KttCMtG bb
with:

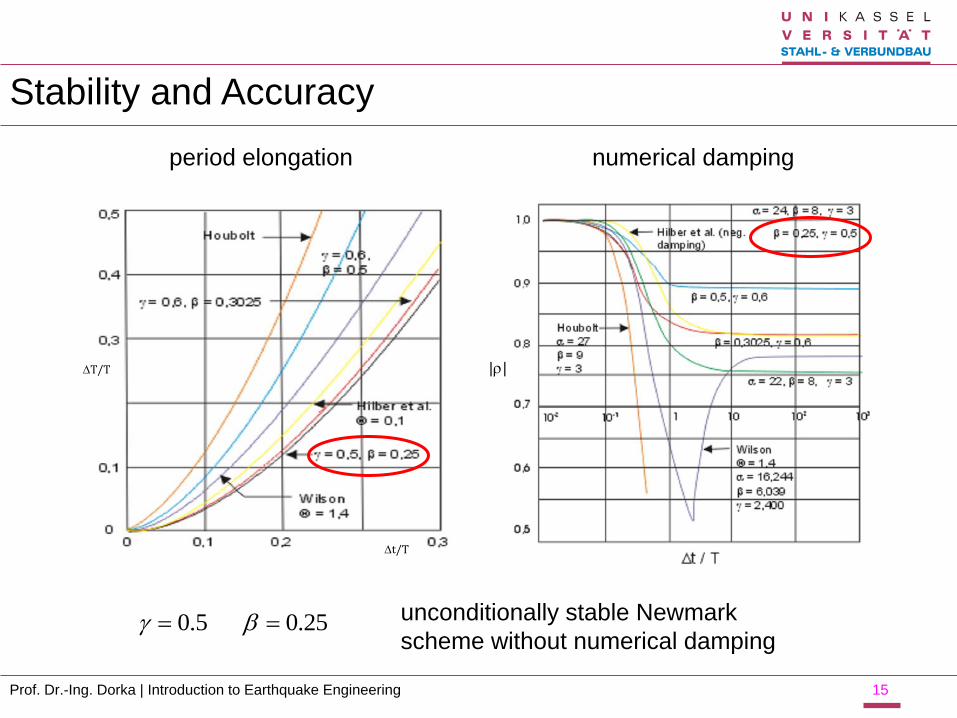
Stability and Accuracy
Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 14
Stability and Accuracy
tYety )(
n
tttt
n yYeeYey
1
01
2212
2
21
2
21
22
kttcm
kttcm
kttcm
b
b
b
Solution for linear SDOF-
system:
and its recurrent form:
yields a characteristc equation:
1
1
exact solution:
stable solution with numerical
damping:
Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 15
T/T
t/T
||
period elongation numerical damping
unconditionally stable Newmark
scheme without numerical damping 5.0 25.0b
Stability and Accuracy

Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 16
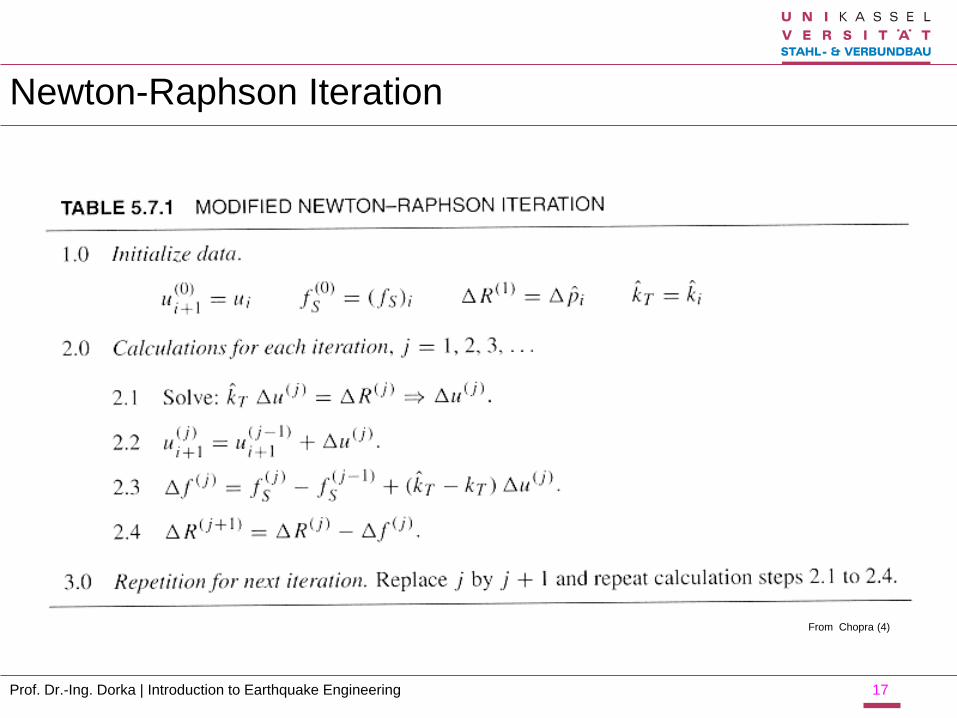
Newton-Raphson Iteration
From Chopra (4)
1
0
1 n
r
n fGuu Since the response fr at time n+1 is not known, an
iteration within each time step is required to solve this
equation:
Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 17
From Chopra (4)
Newton-Raphson Iteration

Examples of time history
Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 18
Response of linear SDOF-system with T=0,5 s and z=0 to El Centro ground motion
From Chopra (4)
s
t
0
0
f elastic resisting force
u total acceleration
of the mass
f peak value of
elastic resisting force
u peak value of
total acceleration
w weight of mass

Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 19
From Chopra (4)
y y
y
o o
f uf normalized yield strength
f u
m
y
uductility factor
u
Examples of time history

Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 20
From Chopra (4)
Response of elastoplastic system with T=0,5 s, z=0 and fy=0,125
to El Centro ground motion deformation
resisting force
expressed as
acceleration
time intervalls of
yielding
force-deformation
relation (hysteresis)
yield strength
Examples of time history

Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 21
Examples of time history
From Chopra (4)
Deformation response and yielding of four systems due to El Centro
ground motion; T=0,5 s, z=5% and fy=1- 0,5 - 0,25 and 0,125

F
1m u d u k u m y t
m
Response Spectra
Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 22
viscously damped SDOF oscillator
w w 2
Fu 2 u u y t
where: Eigenfrequency:
Damping ratio:
w k
m
w
d
2 m
-solving this equation for various w and z, but
only for one specific accelerogramm
-the maximum absolute acceleration of this
solution gives us the abzissa for the
following diagramm
From Petersen (2)
From Meskouris (5)

Response Spectra given by EC 8
Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 23
The acceleration response spectra in EC 8 are
given with respect to the subsoil classes
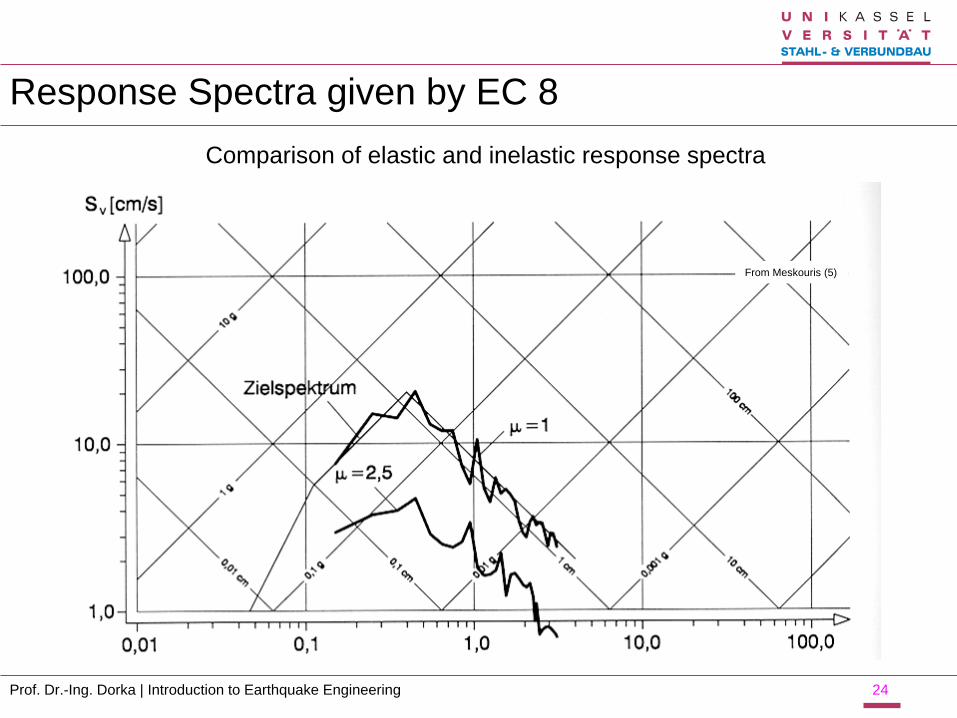
Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 24
From Meskouris (5)
Comparison of elastic and inelastic response spectra
Response Spectra given by EC 8

Modal Analysis
Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 25
linear equations of motion for a
MDOF, homogeneous, undamped
case
0m u k u solving the eigenvalue
problem gives us the
modal matrix F
F F F F F 1 2 3 ..... n
with this modal matrix, the equations of motion
can be transform into modal coordinates F F F F
0
0
T Tm u k u
M K
or for a damped case with ground acceleration
F F F F F F F
T T T T
Fm u c u k u m j u t
M C K F t
now we have uncoupled equations of motion for n SDOF-
systems in modal coordinates

Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 26
These n equations could be solved in
known ways, so we get n solutions in
modal coordinates in the time domain
1
2
j
n
t
t
tt
t
With the modal matrix we are able to
transform these solutions back into
local coordinates
F
1
2
j
n
u t
u t
u t tu t
u t
Modal Analysis
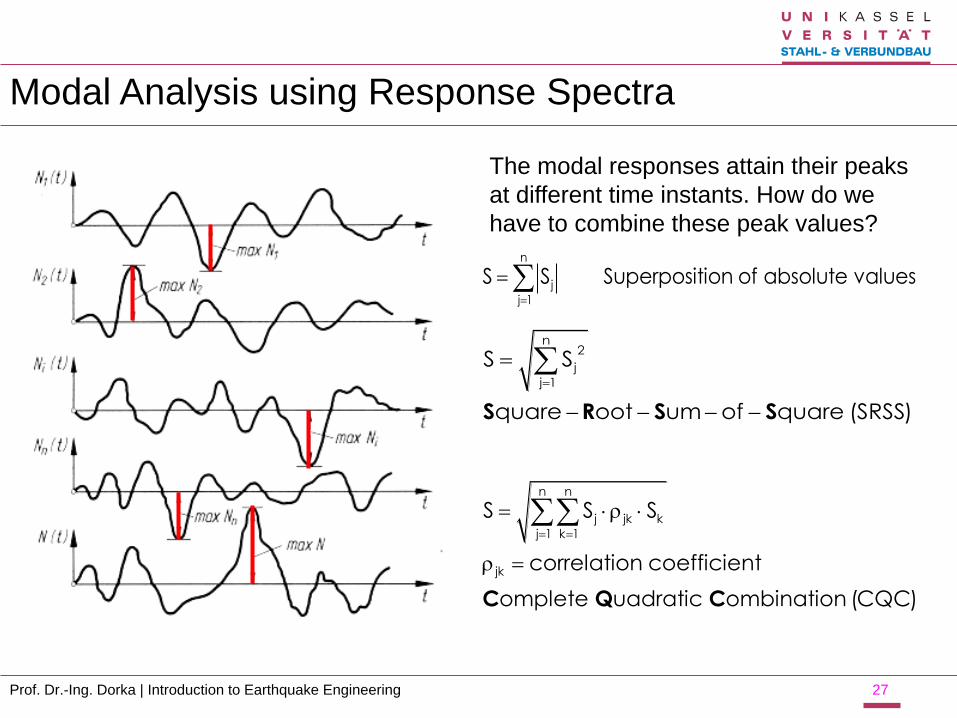
Modal Analysis using Response Spectra
Prof. Dr.-Ing. Dorka | Introduction to Earthquake Engineering 27
n
j
j 1
S S Superposition of absolute values
The modal responses attain their peaks
at different time instants. How do we
have to combine these peak values?
n
2
j
j 1
S S
quare oot um of quare (SRSS)S R S S
n n
j jk k
j 1 k 1
jk
S S S
correlation coefficient
omplete uadratic ombination (CQC)C Q C

(1) Wakabayashi –
Design of Earthquake-Resistant Buildings
McGraw-Hill Book Company
(2) Petersen –
Dynamik der Baukonstruktionen
Vieweg
(3) Clough, Penzien –
Dynamics of Structures
McGraw-Hill
(4) Chopra –
Dynamics of Structures
Prentice Hall
(5) Meskouris–
Baudynamik
Ernst & Sohn
(6) Zienkiewicz–
The Finite Element Method
McGraw-Hill Book Company
(7) Pradlwarter, Schuëller, Dorka
Reliability of MDOF-systems with hysteretic
devices,
in Engineering Structures, Vol. 20, 1998
Elsevier
References


















