Introduction to AI Robotics Chapter 2. The Hierarchical Paradigm 2012.09.26 Hyeokjae Kwon.
21
Introduction to AI Robotics Chapter 2. The Hierarchical Paradigm 2012.09.26 Hyeokjae Kwon
-
Upload
rodney-james -
Category
Documents
-
view
230 -
download
1
Transcript of Introduction to AI Robotics Chapter 2. The Hierarchical Paradigm 2012.09.26 Hyeokjae Kwon.

Introduction to AI Robotics Chapter 2. The Hierarchical Paradigm
2012.09.26
Hyeokjae Kwon

Robotic Paradigms
• A paradigm is a philosophy or set of assumptions and/or techniques which characterize an approach to a class of problems.
• Applying the right paradigm makes problem solving easier.

The Hierarchical Paradigm
PLANSENSE ACT
S,P,A organization of Hierarchical Par-adigm
Alternative description of how the 3 primi-tives interact in the Hierarchical Paradigm

Shakey
• First AI robot.
• Built by SRI(Stanford Research Institute) for DARPA 1967-70.
• Used STRIPS(STanford Research Institute ProblemSolver) as main Algorithm for controlling what to do.

Video(Shakey)
• Shakey was one of the first autono-mous mobile robots, built at the AI Center during 1966-1972. This film, SHAKEY: Experimentation in Robot Learning and Planning was produced by Peter Hart and Nils Nilsson around 1969.

Video(Flakey)
• Flakey is SRI's autonomous mobile robot that was featured on PBS with Alan Alda in 1994 as part of the Sci-entific American Frontiers series.

Video(SRI-UCAV)
• The UCAV project is concerned with distributed continuous planning and execution in autonomous vehicles. These videos were produced in 2002.

How to Develop a Plan in STRIPS?
• Use “means-ends analysis”
- If robot is not at goal, then measure the distance (or difference) be-tween robot’s current state and its goal state.
- Find an action that the robot can take that will reduce this distance, and select it if open conditions are satisfied.
- Make the first false precondition of this action the new “subgoal”, remembering old goal by pushing on stack.
-Recursively reduce difference by repeating above.
- When all open conditions for an action are satisfied, add the action to the plan stack and update world model.

Strips : Means-Ends Analysis
Difference: 3000 miles
INITIAL STATE: Tampa, Florida (0,0)
GOAL STATE: Stanford, California (1000,2828)
“Go to Stanford AI Lab”
For example using an arbitrary frame of refer-ence that put Tampa at the center of the world with made-up distances to Stanford:

Difference Table
d>=200 miles FLY
100<d<200 RIDE_TRAIN
d<=100 DRIVE
Distance(difference)
mode of transportation(OPERATOR)
d<1 WALK
• This could lead to a data structure called a difference table of how to make decisions:
- Different modes of transportation are appropriate for different distances.- A mode of transportation, fly, ride_train, drive, walk, in the table is really a function in the robot’s program. - A robot following this difference table would begin by flying as close as
itcould to SAIL.
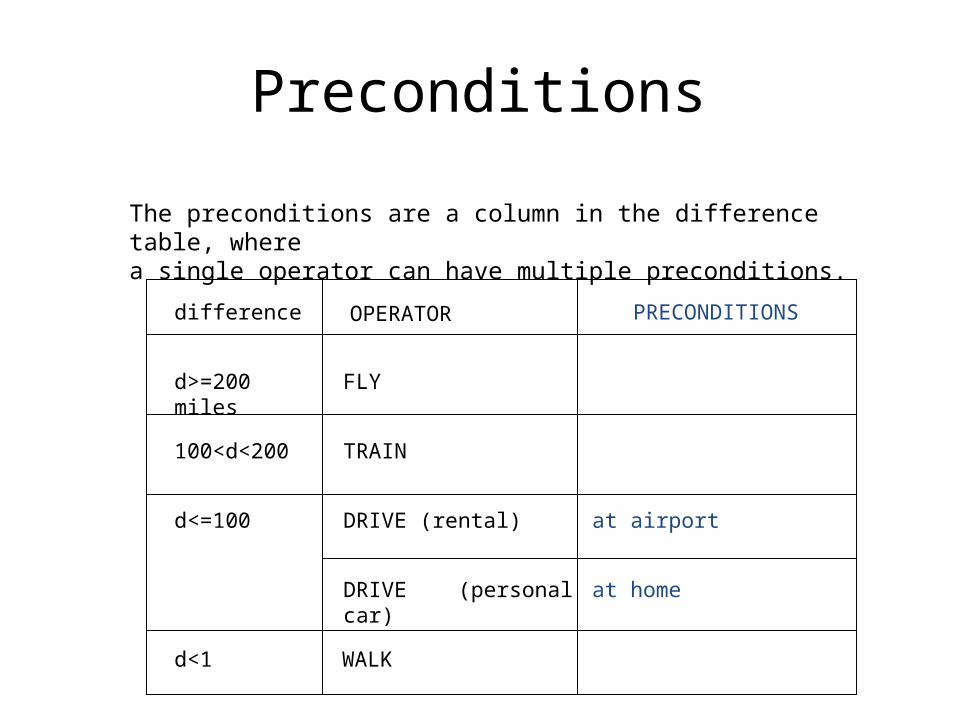
Preconditions
d>=200 miles FLY
100<d<200 TRAIN
d<=100 DRIVE (rental)
DRIVE (personal car)
difference OPERATOR
d<1 WALK
at airport
at home
PRECONDITIONS
The preconditions are a column in the difference table, wherea single operator can have multiple preconditions.

Maintaining State of the World :Add and Delete Lists
d>=200 miles
FLY
100<d<200
TRAIN
d<=100 DRIVE (rental)
at airport
DRIVE (per-sonal)
at home
distance OPERATOR PRE-CONDI-TIONS
d<1 WALK
at city Yat airport
at city Yat train sta-tion
ADD-LIST
at city X
at city X
DELETE-LIST
This two lists are stored in the difference table so that when the robot picks an operator based on the difference and operator, it can easily apply the appropriate modifications to the world.

Strips Summary
• Designer must set up a :– World model representation.– Difference table with operators, preconditions, add &
delete lists.– Difference evaluator.
• Strips assumes closed world : – Closed world: world model contains everything needed
for robot (implication is that it doesn’t change).– Open world: world is dynamic and world model may not
be complete.
• Strips suffers from frame problem :– Frame problem: representation grows too large to rea-
sonably operate over.

Nested Hierarchical Controller
• The NHC (Nested Hierarchical Controller) architec-ture has components that are easily identified as either SENSE, PLAN, or ACT.
• Major contribution of NHC: decomposition of planning into three subsystems.

Nested Hierarchical Con-troller
• Uses map to locate the robot and goal.
• Generates path from current position to goal.
• Generates actions ro-bot must execute to follow path segment.
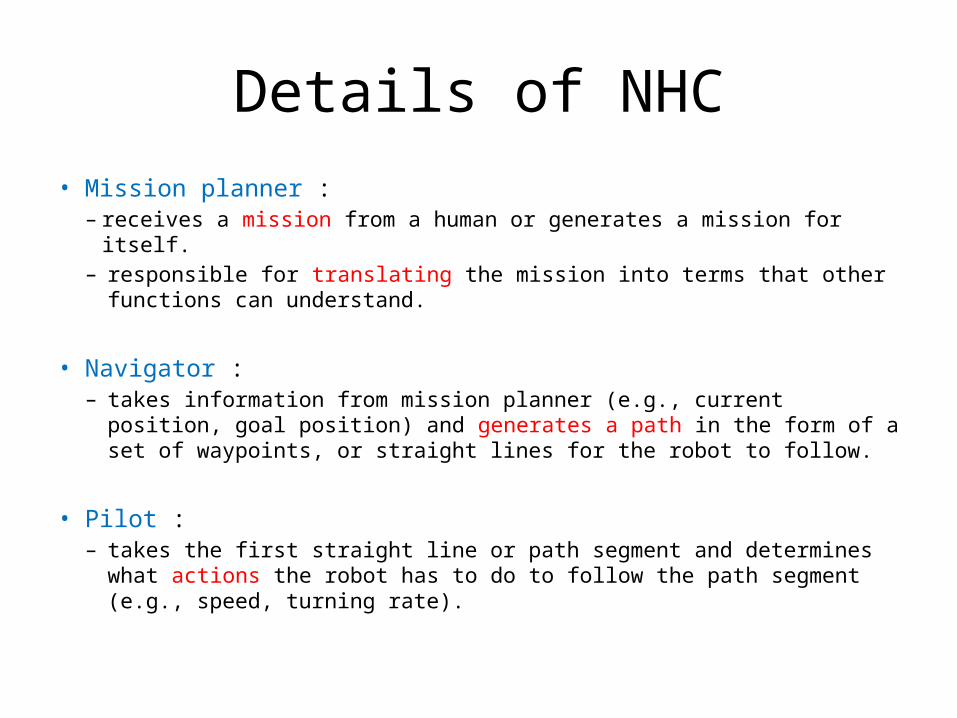
Details of NHC
• Mission planner :– receives a mission from a human or generates a mission for it-
self.– responsible for translating the mission into terms that other
functions can understand.
• Navigator : – takes information from mission planner (e.g., current position,
goal position) and generates a path in the form of a set of waypoints, or straight lines for the robot to follow.
• Pilot :– takes the first straight line or path segment and determines
what actions the robot has to do to follow the path segment (e.g., speed, turning rate).

NIST RCS & NASREM• NIST RCS (National Institute of Standards and Technology Real-
time Control System): developed to serve as standard for manufactures’ development of more intelligent robots.
• Similar in design to NHC : – Primary difference: sensory perception includes preprocessing.

Details of RCS
• Value judgment plans and the simu-lates the plans to ensure they will work.
• The planner gives the plan to Behav-ior Generation module, which con-verts the plans into actions.

Multiple Layers of NIST RCS & NASREM
• Each layer has :– Sensory processing– World modeling– Task decomposition– Value judgment
• All layers joined by global memory through which rep-resentational knowledge is shared.
• Perception is not tied directly to action.
• Perception is still integrated into a global world model.

Evaluations of Hierarchical Architec-tures
• Robots (other than the Walter’s tortoise and Braitenberg’s vehicles) built before 1985 typically used hierarchical style.
• Primary advantage :– provides an ordering of the relationship between sensing, plan-
ning, and acting.
• Primary disadvantage :– planning: every update cycle, robot had to update global world
model, then plan, which introduces a bottleneck.– sensing and acting are disconnected.– appropriate hierarchical decomposition is application-dependent. – uncertainty not well handled.

Thank you