Information-Theoretic Imaging Hyperspectral …jao/Talks/InvitedTalks/cmu...Information-Theoretic...
63
Information Information - - Theoretic Imaging Theoretic Imaging with Applications in with Applications in Hyperspectral Hyperspectral Imaging and Imaging and Transmission Transmission Tomography Tomography Joseph A. O Joseph A. O ’ ’ Sullivan Sullivan Electronic Systems and Signals Research Laboratory Department of Electrical Engineering Washington University [email protected] http://essrl.wustl.edu/~jao Supported by: ONR, ARO, NIH ONR, ARO, NIH
Transcript of Information-Theoretic Imaging Hyperspectral …jao/Talks/InvitedTalks/cmu...Information-Theoretic...

InformationInformation--Theoretic Imaging Theoretic Imaging with Applications inwith Applications in
HyperspectralHyperspectral Imaging and Imaging and TransmissionTransmission TomographyTomography
Joseph A. OJoseph A. O’’SullivanSullivan
Electronic Systems and Signals Research Laboratory
Department of Electrical Engineering
Washington University
http://essrl.wustl.edu/~jao
Supported by: ONR, ARO, NIHONR, ARO, NIH
J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
2
CollaboratorsCollaborators
Michael D. DeVore
Natalia A. Schmid
Metin Oz
Ryan Murphy
Jasenka Benac
Adam Cataldo
Donald L. Snyder
William H. Smith
Daniel R. Fuhrmann
Jeffrey F. Williamson
Bruce R. Whiting
Richard E. Blahut
Michael I. Miller
Chrysanthe Preza
David G. Politte
James G. Blaine
Faculty Students and Post-Docs

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
3
Outline:Outline:
•• Information Theory and ImagingInformation Theory and Imaging
•• HyperspectralHyperspectral ImagingImaging
-- Information Value DecompositionInformation Value Decomposition
•• TransmissionTransmission TomographyTomography
-- Estimate in Exponential FamilyEstimate in Exponential Family
-- ObjectObject--ConstrainedConstrained
ComputerizedComputerized TomographyTomography
•• Alternating Minimization AlgorithmsAlternating Minimization Algorithms
•• Applications: HSI, CTApplications: HSI, CT
•• ConclusionsConclusions

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
4
Some Roles of Information TheorySome Roles of Information TheoryIn Imaging ProblemsIn Imaging Problems
Some Important Ideas:Some Important Ideas:
•• Roles depend on problem studiedRoles depend on problem studied
•• Key problems are in detection, Key problems are in detection,
estimation, and classificationestimation, and classification
•• Information is quantifiableInformation is quantifiable
•• SNR as a measure has limitationsSNR as a measure has limitations
•• Information theory often providesInformation theory often provides
performance boundsperformance bounds
J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
5
How to Measure InformationHow to Measure Information
Information for what?Information for what?
Information relative to what?Information relative to what?
IllIll--defined questions defined questions clearly defined problemclearly defined problem
Can we measure the information in an image?Can we measure the information in an image?
Does one sensor provide more information than another?Does one sensor provide more information than another?
Does resolution measure information?Does resolution measure information?
Do more pixels in an image give more information?Do more pixels in an image give more information?
QUESTIONS:QUESTIONS:
ANSWERANSWER::
MAYBEMAYBE

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
6
Measuring InformationMeasuring Information
Information for what?Information for what?
•• DetectionDetection
•• EstimationEstimation
•• ClassificationClassification
•• Image formationImage formation
Information relative to what?Information relative to what?
•• Noise onlyNoise only
•• Clutter plus noiseClutter plus noise
•• Natural SceneryNatural Scenery

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
7
Information Theory and ImagingInformation Theory and Imaging
•• Center for Imaging Science established 1995Center for Imaging Science established 1995
•• Brown MURI on Performance Metrics established 1997Brown MURI on Performance Metrics established 1997
•• Invited Paper 1998Invited Paper 1998
J. A. OJ. A. O’’Sullivan, R. E. Sullivan, R. E. BlahutBlahut, and D. L. Snyder,, and D. L. Snyder,
““InformationInformation--Theoretic Image Formation,Theoretic Image Formation,”” IEEEIEEE
Transactions on Information TheoryTransactions on Information Theory, Oct. 1998., Oct. 1998.
•• IEEE 1998 Information Theory Workshop on Detection,IEEE 1998 Information Theory Workshop on Detection,
Estimation, Classification, and ImagingEstimation, Classification, and Imaging
•• IEEE Transactions on Information TheoryIEEE Transactions on Information Theory SpecialSpecial
Issue on InformationIssue on Information--Theoretic Imaging, Aug. 2000Theoretic Imaging, Aug. 2000
•• Complexity Regularization, Large Deviations, Complexity Regularization, Large Deviations, ……

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
8
IEEE Transactions on Information TheoryIEEE Transactions on Information Theory, October 1998, , October 1998,
Special Issue to commemorate the 50th anniversary of Special Issue to commemorate the 50th anniversary of
Claude E. Shannon's Claude E. Shannon's
A Mathematical Theory of CommunicationA Mathematical Theory of Communication
Problem DefinitionProblem Definition
Optimality CriterionOptimality Criterion
Algorithm DevelopmentAlgorithm Development
Performance QuantificationPerformance Quantification

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
9
HyperspectralHyperspectral ImagingImaging
at Washington Universityat Washington University
Donald L. SnyderDonald L. Snyder
William H. SmithWilliam H. Smith
Daniel R. Daniel R. FuhrmannFuhrmann
Joseph A. OJoseph A. O’’SullivanSullivan
Chrysanthe PrezaChrysanthe Preza
WU TeamWU Team
SnyderSnyder SmithSmith FuhrmannFuhrmann OO’’SullivanSullivan
Digital Array Scanning Digital Array Scanning
InterferometerInterferometer
(DASI)(DASI)

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
10
HyperspectralHyperspectral ImagingImaging• Scene Cube Data Cube
• “Drink from a fire hose”
• Filter wheel, interferometer,
tunable FPAs
• Modeling and processing:
- data models
- optimal algorithms
- efficient algorithms

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
11
Hyperspectral Imaging Likelihood ModelsHyperspectral Imaging Likelihood Models
ideal data : r y y
y h y x : s x : dxd
h y x : ha y x : ha y x :2
shear vector for Wollaston prism
h y x : wavelength dependent amplitude PSF of DASI
s x : scene intensity for incoherent radiation at x,
nonideal (more realistic) data :
r y Poisson y 0 y Gaussian y
data likelihood :
E r | scene log1
n y !y 0 y
n ye
y 0 ye
r y n y2
2 2
n y 1y 1
Y

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
12
Idealized Data ModelIdealized Data Model
•• Data spectrum for each pixel Data spectrum for each pixel ssjj
•• Linear combination of constituent spectraLinear combination of constituent spectra
•• Problem: Estimate constituents and proportions Problem: Estimate constituents and proportions subject to subject to nonnegativitynonnegativity;; positivitypositivity ofof SS assumedassumed
•• Ambiguity if Ambiguity if
•• Comments: Radiometric Calibration; Comments: Radiometric Calibration; Constraints FundamentalConstraints Fundamental
K
k
kjkj as1
AS

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
13
Idealized Problem Statement:Idealized Problem Statement:MaximumMaximum--LikelihoodLikelihood Minimum IMinimum I--divergencedivergence
•• Poisson distributed data Poisson distributed data loglikelihoodloglikelihood functionfunction
•• Maximization over Maximization over and A equivalent to and A equivalent to minimization of Iminimization of I--divergencedivergence
AS
I
i
J
j
K
k
kjik
K
k
kjikij aasASl1 1 11
ln)|(
I
i
J
j
K
k kjikijK
k kjik
ijij as
a
ssASI
1 11
1
ln)||(
•• Information Value Decomposition ProblemInformation Value Decomposition Problem
J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
14
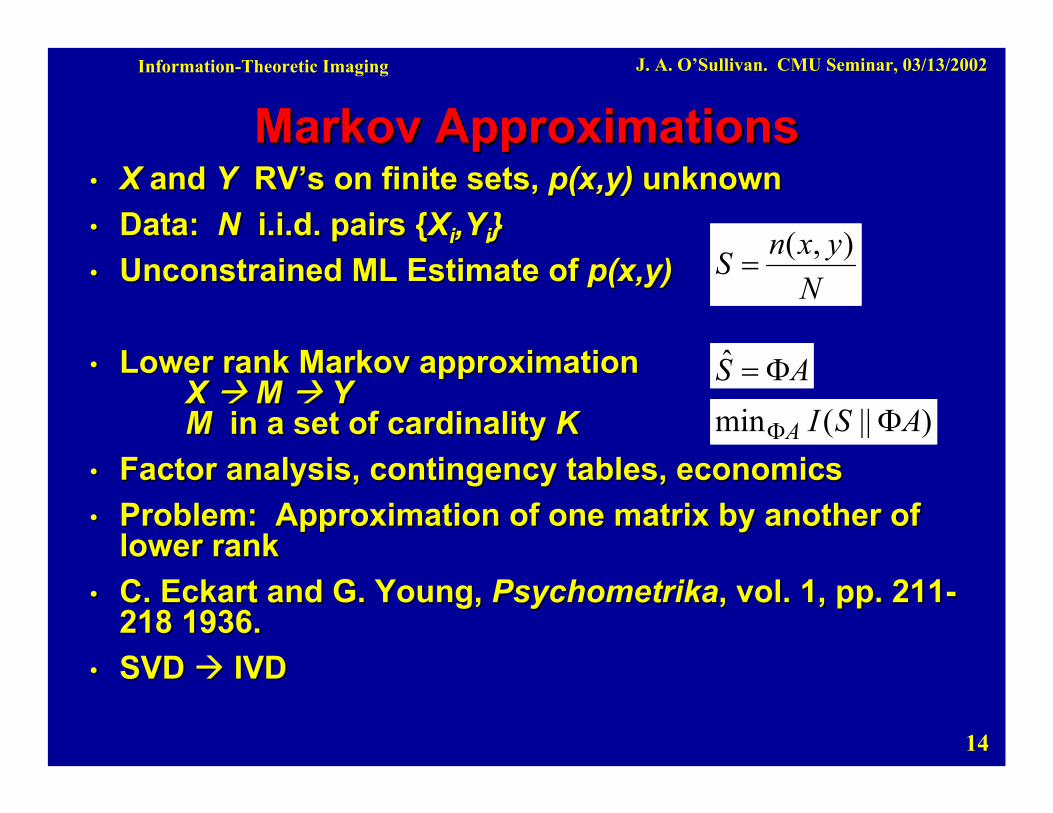
Markov ApproximationsMarkov Approximations•• XX andand YY RVRV’’s on finite sets, s on finite sets, p(x,y)p(x,y) unknownunknown
•• Data:Data: NN i.i.d. pairs {i.i.d. pairs {XXii,Y,Yii}}
•• Unconstrained ML Estimate of Unconstrained ML Estimate of p(x,y)p(x,y)
•• Lower rank Markov approximation Lower rank Markov approximation XX MM YYMM in a set of cardinality in a set of cardinality KK
•• Factor analysis, contingency tables, economicsFactor analysis, contingency tables, economics
•• Problem: Approximation of one matrix by another of Problem: Approximation of one matrix by another of lower ranklower rank
•• C.C. EckartEckart and G. Young, and G. Young, PsychometrikaPsychometrika, vol. 1, pp. 211, vol. 1, pp. 211--218 1936.218 1936.
•• SVDSVD IVDIVD
N
yxnS
),(
AS
)||(min ASIA

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
15
CT Imaging in Presence of High CT Imaging in Presence of High Density AttenuatorsDensity Attenuators
BrachytherapyBrachytherapy applicatorsapplicators
AfterAfter--loadingloading colpostatscolpostats
for radiation oncologyfor radiation oncology
Cervical cancer: 50% survival rateCervical cancer: 50% survival rate
Dose prediction importantDose prediction important
ObjectObject--Constrained Computed Constrained Computed
TomographyTomography (OCCT)(OCCT)
J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
16
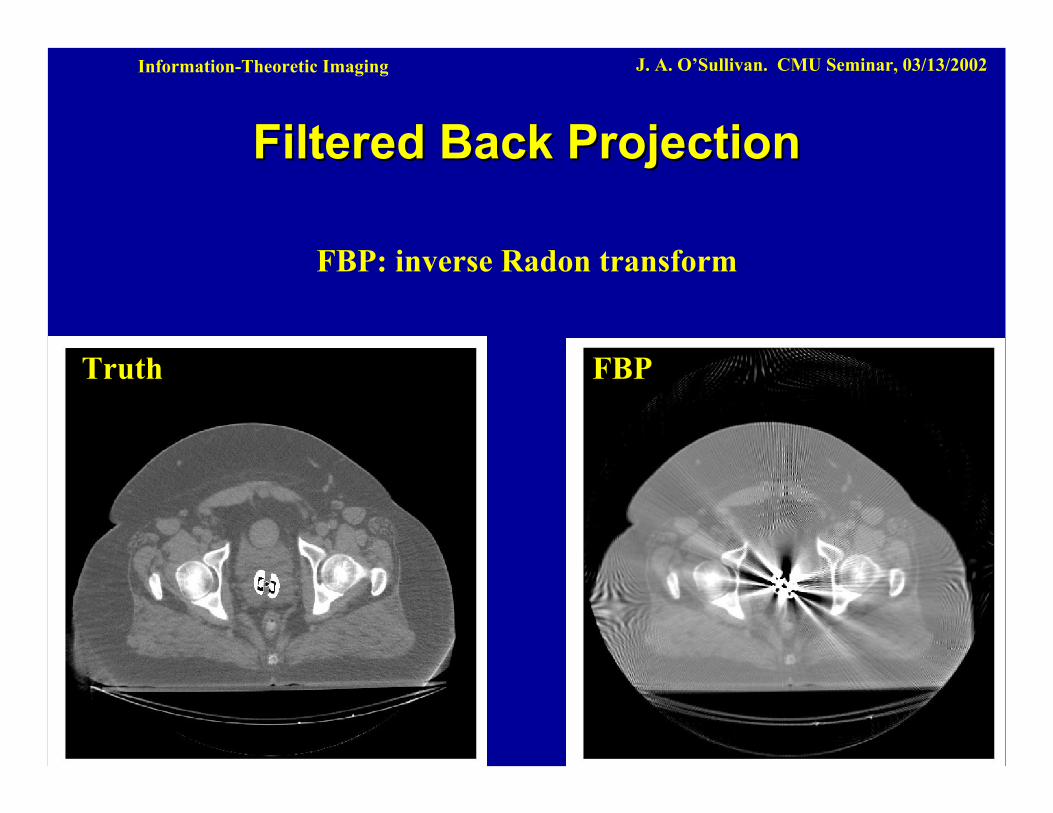
Filtered Back ProjectionFiltered Back Projection
Truth FBP
FBP: inverse Radon transform

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
17
TransmissionTransmission TomographyTomography
•• SourceSource--detector pairs indexed by detector pairs indexed by yy; pixels indexed by ; pixels indexed by xx
•• DataData d(y)d(y) Poisson, means Poisson, means g(y:g(y: ),), loglikelihoodloglikelihood functionfunction
•• MeanMean unattenuatedunattenuated countscounts II00, mean background , mean background
•• Attenuation function Attenuation function (x,E)(x,E),, EE indexes energiesindexes energies
•• Maximize over Maximize over oror ccii;; equivalently minimize Iequivalently minimize I--divergencedivergence
•• Comment: pose search Comment: pose search c(x) = cc(x) = caa(x:(x: ) +) + ccbb(x)(x)
l (d : ¹ ) =X
y2 Y
[d(y) ln g(y : ¹ ) ¡ g(y : ¹ )]
¹ (x; E ) =P I
i = 1 ¹ i (E )ci (x)
g(y : ¹ ) =P
E I 0(y; E) exp [¡P
x h(yjx)¹ (x; E )] + ¯(y)

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
18
Alternating Minimization AlgorithmsAlternating Minimization Algorithms
•• Define problem as Define problem as minminqq (q)(q)
•• DeriveDerive VariationalVariational Representation:Representation: (q) = (q) = minminpp J(p,q)J(p,q)
•• JJ is an auxiliary function is an auxiliary function pp is in auxiliary set is in auxiliary set PP
•• Result: double minimization Result: double minimization minminqq minminpp J(p,q)J(p,q)
•• Alternating minimization algorithmAlternating minimization algorithm
),(
),(
)1()1(
)()1(
minarg
minarg
qpJq
qpJp
l
l
l
Pp
l
Comments: Guaranteed Monotonicity; J selected carefully
J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
19
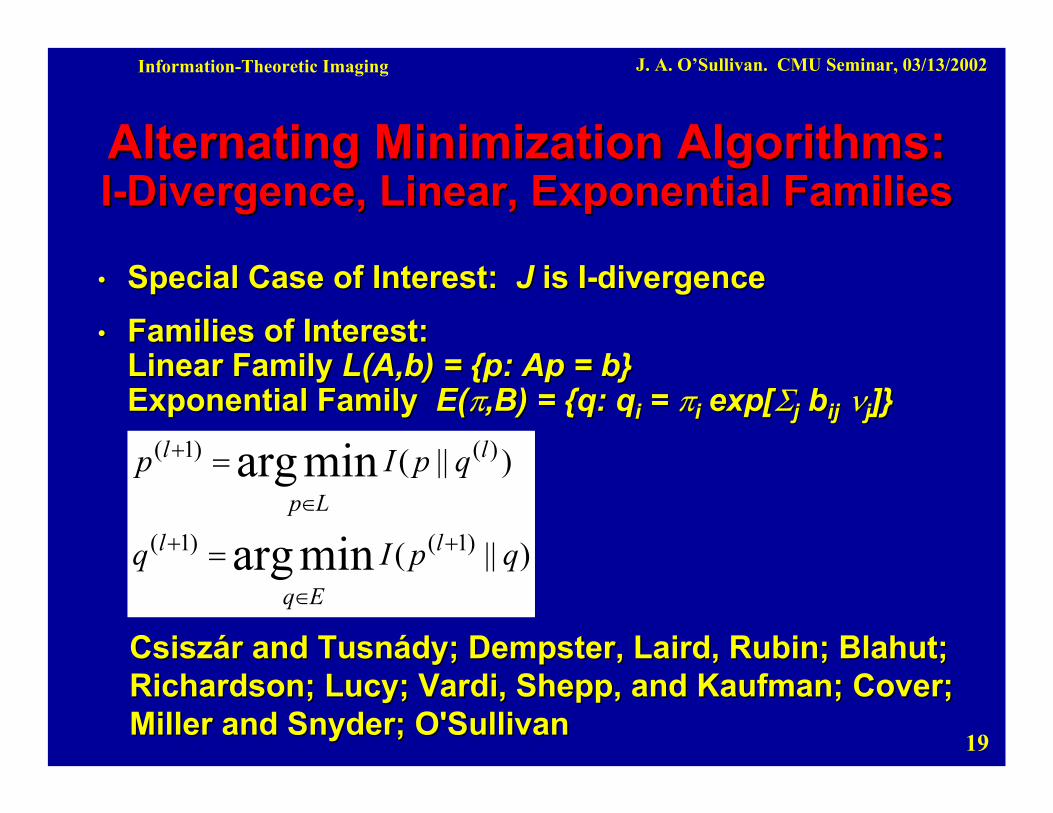
Alternating Minimization Algorithms:Alternating Minimization Algorithms:II--Divergence, Linear, Exponential FamiliesDivergence, Linear, Exponential Families
•• Special Case of Interest:Special Case of Interest: JJ is Iis I--divergencedivergence
•• Families of Interest:Families of Interest:Linear Family Linear Family L(A,b) = {p: L(A,b) = {p: ApAp = b}= b}Exponential FamilyExponential Family E(E( ,B) = {q: ,B) = {q: qqii == ii exp[exp[ jj bbijij jj]}]}
)||(
)||(
)1()1(
)()1(
minarg
minarg
qpIq
qpIp
l
Eq
l
l
Lp
l
CsiszCsiszáárr andand TusnTusnáádydy;; DempsterDempster, Laird, Rubin;, Laird, Rubin; BlahutBlahut;;
Richardson; Lucy;Richardson; Lucy; VardiVardi,, SheppShepp, and Kaufman; Cover;, and Kaufman; Cover;
Miller and Snyder; O'SullivanMiller and Snyder; O'Sullivan

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
20
Alternating Minimization ExampleAlternating Minimization Example
•• Linear family: pLinear family: p11 + 2 p+ 2 p22 = 2= 2
•• Exponential family: qExponential family: q11 = exp (= exp (vv), q), q22 = exp (= exp (--vv))
0 1 2 3 4 50
1
2
3
4
5
p1, q
1
p 2,
q2
0 1 2 3 4 50
1
2
3
4
5
p1, q
1
p 2,
q2
0.6 0.8 1 1.2 1.40.2
0.4
0.6
0.8
1
1.2
p1, q
1
p2,
q 2
0.6 0.8 1 1.2 1.40.2
0.4
0.6
0.8
1
1.2
p1, q
1
p2,
q 2
)||(minmin qpILpEq
J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
21
Information GeometryInformation Geometry
•• II--divergence is nonnegative, convex in pair divergence is nonnegative, convex in pair (p,q)(p,q)
•• Generalization of relative entropy, Generalization of relative entropy, example of fexample of f--divergencedivergence
•• First triangle equality: First triangle equality: pp inin LL
•• Second triangle equality:Second triangle equality: qq inin EE
)||()||()||()||( *** minarg qpIppIqpIqpIp
Lp
)||()||()||()||( *** minarg qqIqpIqpIqpIq
Eq
J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
22
VariationalVariational RepresentationsRepresentations
•• Convex decomposition lemma. Let Convex decomposition lemma. Let ff be convex. Thenbe convex. Then
•• Special Case:Special Case: ff isis lnln
•• Basis for EM; see also De Basis for EM; see also De PierroPierro, Lange, , Lange, FesslerFessler
i
ii
i i
ii
rii
rr
xfrxf
0,1
)()(1
i
i
i i
ii
Ppi
i
ppP
q
ppq
1:
lnminln

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
23
ShrinkShrink--Wrap Algorithm for Wrap Algorithm for EndmembersEndmembers
FuhrmannFuhrmann, WU, WU
SS == AA
== EndmembersEndmembers, K Columns, K Columns
AA = Pixel Mixture Proportions= Pixel Mixture Proportions
SVD, Then Simplex Volume MinimizationSVD, Then Simplex Volume Minimization

SS== AA
GivenGiven andand SS, estimate , estimate AA..
Uses IUses I--Divergence Discrepancy Divergence Discrepancy
Measure.Measure.
Alternating Minimization AlgorithmsAlternating Minimization Algorithms
for Hyperspectral Imagingfor Hyperspectral Imaging
++PoissonPoisson
ProcessProcess
CC
AlternatingAlternating
MinimizationMinimization
AlgorithmAlgorithm
InitialInitial
EstimatedEstimated
CoefficientsCoefficients
EstimatedEstimated
CoefficientsCoefficients
Snyder, WUSnyder, WU OO’’Sullivan, WUSullivan, WU

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
25
Information Value DecompositionInformation Value Decomposition
Applied toApplied to HyperspectralHyperspectral DataData
• Downloaded spectra from USGS website
• 470 Spectral components
• Randomly generated A with 2000 columns
• Ran IVD on result

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
26
Information Value DecompositionInformation Value DecompositionApplied to Applied to HyperspectralHyperspectral DataData

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
27
Information Theoretic Imaging:Information Theoretic Imaging:
Application to Hyperspectral ImagingApplication to Hyperspectral Imaging
Problem DefinitionProblem Definition
Optimality CriterionOptimality Criterion
Algorithm DevelopmentAlgorithm Development
Performance QuantificationPerformance Quantification
•• Likelihood Models for SensorsLikelihood Models for Sensors
•• Likelihood Models for ScenesLikelihood Models for Scenes
•• Spectrum Estimation andSpectrum Estimation andDecompositionDecomposition
•• Performance QuantificationPerformance Quantification
•• Applications to Available SensorsApplications to Available Sensors
J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
28
HyperspectralHyperspectral ImagingImagingOngoing EffortsOngoing Efforts
•• Scene Models Including Spatial and Scene Models Including Spatial and Wavelength CharacteristicsWavelength Characteristics
•• Sensor Models Including Sensor Models Including ApodizationApodization
•• Orientation Dependence ofOrientation Dependence of HyperspectralHyperspectralSignaturesSignatures
•• Expanded Complementary EffortsExpanded Complementary Efforts
•• Atmospheric Propagation ModelsAtmospheric Propagation Models
•• Performance BoundsPerformance Bounds
•• Measures of Added InformationMeasures of Added Information

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
29
CT Minimum ICT Minimum I--Divergence FormulationDivergence Formulation
L(d) = f p(y; E ) ¸ 0 :X
E
p(y; E) = d(y)g
I (dkg(y : c)) = minp2 L (d)
I (pkq)
l(d : ¹ ) =X
y2 Y
[d(y) ln g(y : ¹ ) ¡ g(y : ¹ )]
g(y : ¹ ) =P
E I 0(y; E) exp [¡P
x h(yjx)¹ (x; E )] + ¯(y)
Maximize loglikelihood function over minimize I-divergence
Use Convex Decomposition Lemma
g is a marginal over q

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
30
New Alternating Minimization AlgorithmNew Alternating Minimization Algorithmfor Transmission for Transmission TomographyTomography
minq2 E( I 0;H ¢¹ )
minp2 L (d)
I (pkq)
q(k ) (y; E ) = I 0(y; E ) exp ¡X
x 2 X
X
i
¹ i (E )h(yjx)c(k )i (x)
#
p(k ) (y; E) = q(k ) (y; E)d(y)
PE 0q(k ) (y; E 0)
~b(k )i (x) =
X
y2 Y
X
E
¹ i (E )h(yjx)p(k ) (y; E )
b(k )i (x) =
X
y2 Y
X
E
¹ i (E )h(yjx)q(k ) (y; E )

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
31
New Alternating Minimization AlgorithmNew Alternating Minimization Algorithmfor Transmissionfor Transmission TomographyTomography
c(k+ 1)i (x) = c
(k )i (x) ¡
1
Zi (x)ln
Ã~b
(k )i (x)
b(k )i (x)
!
Interpretation: Compare predicted data to measured data
via ratio of backprojections
Update estimate using a normalization constant
Comments: Choice for constants; monotonic convergence;
Linear convergence; Constraints easily incorporated

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
32
Iterative Algorithm with Known Iterative Algorithm with Known Applicator PoseApplicator Pose
Truth Known Pose
J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
33
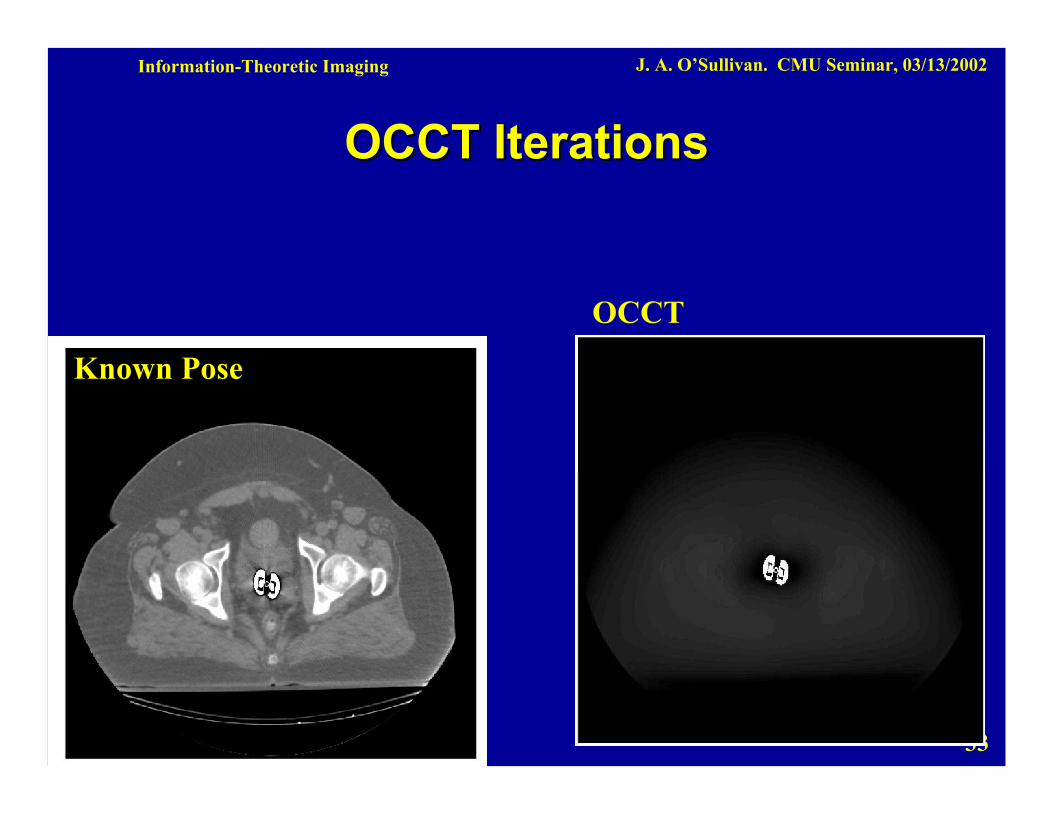
OCCT IterationsOCCT Iterations
Known Pose
OCCT

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
34
TruthTruth Known
Standard
FBP
OCCT

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
35
Magnified views around Magnified views around
brachytherapybrachytherapy applicatorapplicator
Truth OCCT
FBP

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
36
ConclusionsConclusions•• InformationInformation--Theoretic ImagingTheoretic Imaging
•• Alternating Minimization AlgorithmsAlternating Minimization Algorithms
•• HyperspectralHyperspectral ImagingImaging
-- Applying Formal MethodologyApplying Formal Methodology
-- Data CollectionsData Collections
-- Sensor Modeling, Sensor Modeling, LikelihoodsLikelihoods
-- Broad, Ongoing EffortsBroad, Ongoing Efforts
•• CT ImagingCT Imaging
-- New Image Formation AlgorithmNew Image Formation Algorithm
-- Simulations and Scanner DataSimulations and Scanner Data
-- Modeling Issues: Physics CrucialModeling Issues: Physics Crucial

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
37
J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
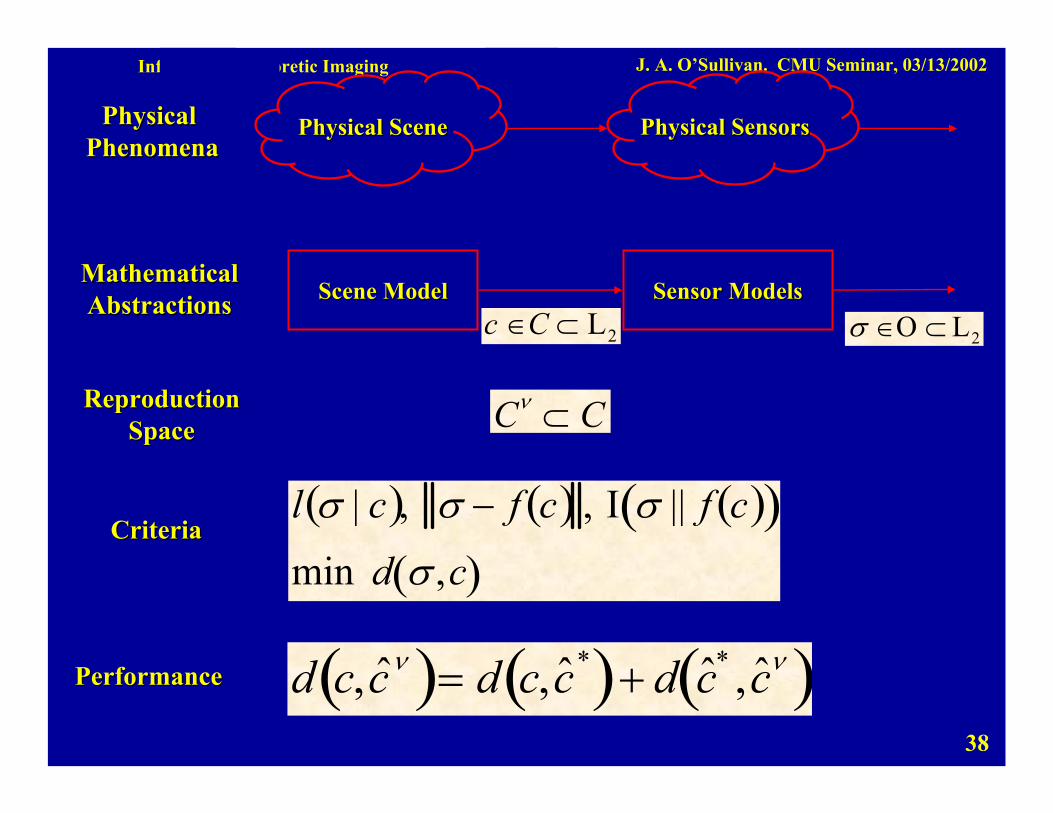
38
PhysicalPhysical
PhenomenaPhenomena
MathematicalMathematical
AbstractionsAbstractions
ReproductionReproduction
SpaceSpace
CriteriaCriteria
PerformancePerformance
Physical ScenePhysical Scene Physical SensorsPhysical Sensors
Scene ModelScene Model Sensor ModelsSensor Models
c C L2 L2
C C
l | c , f c , I || f c
min d ,c
d c, c d c, c*
d c*, c

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
39
Problem DefinitionProblem Definition
Physical Phenomena:Physical Phenomena: Electromagnetic Waves, Electromagnetic Waves, Physical ObjectsPhysical Objects
Mathematical Abstraction:Mathematical Abstraction: Function Spaces (LFunction Spaces (L22),),Dynamical ModelsDynamical Models
Sensor Models:Sensor Models: Projection Models, Projection Models, StatisticsStatistics
Reproduction Space:Reproduction Space: Finite Dimensional Finite Dimensional ApproximationApproximation
Optimality CriterionOptimality CriterionDeterministic:Deterministic: Least Squares, Least Squares,
Minimum DiscriminationMinimum Discrimination
Stochastic:Stochastic: Maximum Likelihood, Maximum Likelihood, MAP, MMSEMAP, MMSE

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
40
Algorithm DevelopmentAlgorithm Development
Iterative Algorithms:Iterative Algorithms: Alternating MinimizationsAlternating MinimizationsExpectationExpectation--MaximizationMaximization
Random Search:Random Search: Simulated Annealing, Simulated Annealing, Diffusion, JumpDiffusion, Jump--DiffusionDiffusion
Performance QuantificationPerformance Quantification
Discrepancy Measures:Discrepancy Measures: Squared Error, Squared Error, DiscriminationDiscrimination
Performance:Performance: Bias, Variance, Bias, Variance, Mean DiscriminationMean Discrimination
Performance Bounds:Performance Bounds: CramerCramer--RaoRao,,HilbertHilbert--SchmidtSchmidt

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
41
Target Orientation EstimationTarget Orientation Estimation
Likelihood Model Approach:Likelihood Model Approach:ppRR|| ,,aa((rr|| ,,aa)) -- Conditional Data ModelConditional Data Model
pp ,,aa(( ,,aa)) -- Prior on orientation (known or simply uniform)Prior on orientation (known or simply uniform)
P(P(aa)) -- Prior on target class (known or simply uniform)Prior on target class (known or simply uniform)
TargetTarget
ClassifierClassifierââ=T72=T72
OrientationOrientation
EstimatorEstimator=135=135
aa=T72=T72
Given a SAR image Given a SAR image rr,,
determine a corresponding determine a corresponding
target class target class ââ AA
Given a SAR image Given a SAR image rr andand
a target class a target class ââ AA,,
estimate target orientationestimate target orientation
Target Classification ProblemTarget Classification Problem

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
42
Training and Testing Problem:Training and Testing Problem:Function Estimation and ClassificationFunction Estimation and Classification
Function
Estimation
L(r|a, ) Inferenceââ=T72=T72
Scene and Sensor
Physics
Training Data
Raw DataProcessing
Image
• Labeled training data: target type and pose
• Log-likelihood parameterized by a function:
mean image, variance image, etc.

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
43
Function Estimation and ClassificationFunction Estimation and Classification
•• Functions are estimated fromFunctions are estimated from-- sample data sets onlysample data sets only-- physical model datasets only (PRISM, XPATCH, etc.)physical model datasets only (PRISM, XPATCH, etc.)-- combination of thesecombination of these
•• Training sets are finiteTraining sets are finite
•• Computational and likelihood models have a finite Computational and likelihood models have a finite number of parametersnumber of parameters
•• Estimation errorEstimation error
•• Approximation errorApproximation error
•• Some regularization is neededSome regularization is needed

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
44
Function EstimationFunction Estimation
LetLet SS andand TT be two target types,be two target types,
ffSS andand ffTT the corresponding functionsthe corresponding functions
fS : D R or R+
Spatial domain Spatial domain DD::
Surface of objectSurface of object
Rectangular region in RRectangular region in R22
ContinuousContinuous
Pose space Pose space ::
Typically SE(3)Typically SE(3)
Simpler to consider SE(2), SO(2)Simpler to consider SE(2), SO(2)
is continuousis continuous
Assume a null function fAssume a null function f00

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
45
Function Estimation: SieveFunction Estimation: Sieve
Function space Function space FF
Family of subsets Family of subsets FF
-- Maximum likelihood estimate of Maximum likelihood estimate of ff exists for each exists for each
-- FF FF
UlfUlf GrenanderGrenander
SplineSpline sievessieves = 1/= 1/Q,Q, wherewhere QQ = number of coefficients.= number of coefficients.
Nonnegative functions, nonnegative expansions.Nonnegative functions, nonnegative expansions.
Pierre Moulin, et al.Pierre Moulin, et al.
ff(( ) = ) = kk a(k)a(k) kk(( ) , a(k) >= 0) , a(k) >= 0

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
46
Sieve GeometrySieve Geometry
.
.
.
.
.fS
F
F1
F2
f2
f1
12

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
47
Discrepancy MeasuresDiscrepancy Measures
Estimation:
Relative entropy between parameterized distributions
d(fS, approximation error
Expected relative entropy for estimated functions
E{d( f )} estimation error
Classification:
Probability of error, rate functions
Decompose into approximation and estimation error
Examine performance as a function of , optimize

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
48
MotivationMotivation
• Many reported approaches to ATR from SAR
• Performance and database complexity are interrelated
• We seek to provide a framework for comparison that:
- Allows direct comparison under identical conditions
- Removes dependency on implementation details
2S12S1 T62T62 BTR 60BTR 60 D7D7 ZIL 131ZIL 131 ZSU 23/4ZSU 23/4
Publicly available SAR data from the MSTAR program

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
49
Approaches: Conditionally Approaches: Conditionally GaussianGaussian
J. A. OJ. A. O’’Sullivan and S. Jacobs, IEEESullivan and S. Jacobs, IEEE--AES 2000AES 2000
Model each pixel as complex Model each pixel as complex GaussianGaussian plus uncorrelated noise:plus uncorrelated noise:
i
NaK
r
i
Ai
i
eNaK
ap 0
2
,
0
,,
1,r
R
aBayes r argmaxa
maxk
p r k ,a
ˆHS r,a argmax
k
p r k ,a
GLRT Classification and MAP Estimation:GLRT Classification and MAP Estimation:
J. A. OJ. A. O’’Sullivan, M. D. Sullivan, M. D. DeVoreDeVore, V. , V. KediaKedia, and M. Miller, IEEE, and M. Miller, IEEE--AES to appear 2000AES to appear 2000

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
50
ApproachApproach
• Select 240 combinations of implementation parameters
• Execute algorithms at each parameterization
• Scatter plot the performance-complexity pairs
• Determine the best achievable performance at any complexity
BMP2 Variance Image at 6 Sizes
ZIL131 Variance Image at 6 Sizes
Six different image sizes from 128x128 to 48x48

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
51
System Parameters and ComplexitySystem Parameters and ComplexityApproximateApproximate (( ,,aa) and ) and 22(( ,,aa) as piecewise constant in ) as piecewise constant in
Implementations parameterized by:Implementations parameterized by:
ww -- number of constant intervals in number of constant intervals in
dd -- width of training intervals in width of training intervals in
NN22 -- number of pixels in an imagenumber of pixels in an image
Database complexity log10(# floating point values / target type)

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
52
Performance and ComplexityPerformance and Complexity
Forty combinations of angular resolution and training interval width.
Variance image of aT62 tank
1 Window trained over 360°
Variance images of a T72 tank
72 Windows trained over 10°

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
53
Problem StatementProblem Statement• Directly compare conditionally Gaussian, log-magnitude MSE,
and quarter power MSE ATR Algorithms
- identical training and testing data
- identical spatial and orientation windows
• Plot performance vs. complexity
- probability of classification error
- orientation estimation error
- log-database size as complexity
• Use 10 class MSTAR SAR images
ApproachApproach• Select 240 combinations of implementation parameters
• Execute algorithms at each parameterization
• Scatter plot the performance-complexity pairs
• Determine the best achievable performance at any complexity

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
54
Approaches: LogApproaches: Log--MagnitudeMagnitude
Minimize distance between rdB = 20 log |r| and dB templates
d2
rdB, LM rdB LM
2
Make decisions according to:
aLM r argmina
mink
d2
rdB, LM k, a
ˆLM r a argmin
k
d2 rdB, LM k ,a
Alternatively, use a form of normalization:
d2
rdB rdB, LM k,a LM k ,a
G. Owirka and L. Novak, SPIE 2230, 1994
L. Novak, et al., IEEE-AES, Jan. 1999

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
55
Approaches: Quarter PowerApproaches: Quarter Power
d2
rQP, QP rQP QP
2
Minimize distance between rQP = |r|1/2 and quarter power templates
Make decisions according to:
aQP r argmina
mink
d2
rQP, QP k, a
ˆQP r,a argmin
k
d2 rQP, QP k,a
d2 rQP
rQP
,QP k ,a
QP k ,a
Or, normalized by vector magnitude:
S. W. Worrell, et al., SPIE 3070, 1997
Discussions with M. Bryant of Wright Laboratory

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
56
ConditionallyConditionally GaussianGaussian ResultsResults

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
57
PerformancePerformance--Complexity LegendComplexity Legend
Forty combinations of number of piecewise constant
intervals and training window width

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
58
LogLog--Magnitude ResultsMagnitude Results
Recognition without normalization Arithmetic mean normalized

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
59
Quarter Power ResultsQuarter Power Results
Recognition without normalization Recognition with normalization

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
60
Normalized Conditionally Normalized Conditionally GaussianGaussianResultsResults

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
61
SideSide--byby--Side ResultsSide ResultsComparison in terms of:
• Performance achievable at a given complexity
• Complexity required to achieve a given performance

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
62
2S1 BMP 2 BRDM 2 BTR 60 BTR 70 D7 T62 T 72 ZIL131 ZSU 23 4
2S1 262 0 0 0 0 0 4 8 0 0 95.62%
BMP 2 0 581 0 0 0 0 0 6 0 0 98.98%
BRDM 2 5 3 227 1 0 14 3 5 4 1 86.31%
BTR 60 1 0 0 193 0 0 0 0 0 1 98.97%
BTR 70 4 5 0 0 184 0 0 3 0 0 93.88%
D7 2 0 0 0 0 271 1 0 0 0 98.91%
T 62 1 0 0 0 0 0 259 11 2 0 94.87%
T 72 0 0 0 0 0 0 0 582 0 0 100%
ZIL131 0 0 0 0 0 0 2 0 272 0 99.27%
ZSU 23 4 0 0 0 0 0 2 0 1 0 271 98.91%
•• Probability of correctProbability of correct
classification: 97.2%classification: 97.2%
Target ClassificationTarget Classification
ResultsResults

J. A. O’Sullivan. CMU Seminar, 03/13/2002Information-Theoretic Imaging
63
• General problem in training/testing posed as
estimation/classification
• Method of sieves (polynomial splines chosen)
• Comprehensive performance-complexity study for
- Ten class MSTAR problem
- Conditionally Gaussian model
- Log-magnitude MSE
- Quarter power MSE
• Provided a framework for direct comparison of alternatives
and selection of implementation parameters
• Analysis ongoing
ConclusionsConclusions