
INDUSTRIA 4.0, Sviluppo Territoriale Umbro Obievi e...
16
Slide 1 INDUSTRIA 4.0, Sviluppo Territoriale Umbro Obie;vi e Opportunità Interazioni con le imprese del territorio Prof. Paolo Valigi Dipartimento di Ingegneria Università degli Studi di Perugia Marsciano – 15.09.2017 UniPG & IRIS Intelligent Systems, Automation and Robotics Laboratory
Transcript of INDUSTRIA 4.0, Sviluppo Territoriale Umbro Obievi e...

Slide 1
INDUSTRIA4.0,SviluppoTerritoriale
UmbroObie;vieOpportunitàInterazioni con le imprese del
territorio
Prof. Paolo Valigi
Dipartimento di Ingegneria
Università degli Studi di Perugia
Marsciano – 15.09.2017 UniPG & IRIS
Intelligent Systems, Automation and Robotics
Laboratory
Slide 2
Industry4.0ParadigmIndustry4.0paradigmisrelatedtotheconceptofsmartfactory:
• Interoperabilitybetweenservices,machinesandpeopleanddecentraliza>onofdecision(InternetofThings/Peole(IoT/P)).
• Assistancesystemstosupporthumansbyaggrega=ngandvisualizinginforma=oncomprehensiblyformakingfastandinformeddecisions.Cyberphysicalsystemstophysicallysupporthumansbyconduc>ngarangeoftasksthatareunpleasant,tooexhaus>ng,orunsafe.
• Cyberphysicalsystemstomakedecisionsontheirownandtoperformtheirtasksasautonomouslyaspossible.
Marsciano – 15.09.2017 UniPG & IRIS

Slide 3
Tematiche in forte espansione
"Theinternetofthings(IoT)isthenetworkofphysicaldevices,vehicles,buildingsandotheritems-embeddedwithelectronics,so?ware,sensors,actuators,andnetworkconnec@vitythatenabletheseobjectstocollectandexchangedata."[Wikipedia]
"Bigdataisatermfordatasetsthataresolargeorcomplexthattradi@onaldataprocessingapplica@onsareinadequate.Challengesincludeanalysis,capture,datacura@on,search,sharing,storage,transfer,visualiza@on,querying,upda@ngandinforma@onprivacy."[Wikipedia]
http://orienta.ing.unipg.it/gallery/video.html
L’offertadidaNcadell’areaInforma>caedElePronica
Marsciano – 15.09.2017 UniPG & IRIS

Slide 4
Ingegneria Informatica ed Elettronica
Laurea Triennale (180 CFU)
Ingegneria Informatica e Robotica
Ingegneria Elettronica per "Internet of Things"
Lauree Magistrali (120 CFU)
Elettronica x IoT
Elettronica x Aerospazio
Data Science
Rob. Avanzata
L’offertadidaNcadell’areaInforma>caedElePronica
Marsciano – 15.09.2017 UniPG & IRIS

Slide 5
Esperienzedicollaborazioneconaziende
Marsciano – 15.09.2017 ISARLAb@UniPG
• Visualinspec>on• Headposees>ma>on• DataMining• Faultdetec>on• Vehiclelocaliza>on,visionbasedDinorma,strumentodellaconvenzione
Intelligent Systems, Automation and
Robotics Laboratory

Slide 6
Schemagenerale
Marsciano – 15.09.2017 ISARLAb@UniPG
• Aggregazionedigrandiquan>tàdida>(DataScience,MachineLearning)
• ModelliprediNvi
• Processidecisionaliautonomi

Slide 7
Esperienze:visualinspec>onStrumen>diComputerVisioneMachineLearningperelaborareda>dafon>(sensori)eterogenee(Laser,Lidar,Cameras,etc…)Applicazioni:• monitoraggiodifeNsuperficialiinlamina>diacciaio,inlinea• monitoraggiodifeNsuperficialiinprodoNalimentari
Marsciano – 15.09.2017 UniPG & IRIS

Slide 8
Esperienze:s>maeinseguimentodellaposadivol>
S>mareeinseguire,basandosisuda>divisione,ladirezionedivistadiunapersona.
Applicazioni:• interazioneuomo-macchina• applicazionicommerciale(vetrine,musei,…)
Marsciano – 15.09.2017 UniPG & IRIS

Slide 9
Esperienze:dataminingRilevare struPuredi alto livelloe/onascosteanalizzandoda>dasorgen>nostruPurateedeterogenee
Driverbehaviormodelling
Dataminingforagriculture
Marsciano – 15.09.2017 UniPG & IRIS

Slide 10
Rilevazione di ostacoli
Algoritmidicomputervisionsviluppa>daISARLABrilevanoinmodoveloceeaffidabilegliostacoli,edidoneialgoritmidicontrolloenavigazioneconsentonodievitarli,intemporeale.Siastereosiamono
Marsciano – 15.09.2017 UniPG & IRIS

Slide 11
Aircra_ SensorFaultDetec>onIsola>onandAccomoda>on(SFDIA)
Collaborazione con West Virginia University
Esempio di machine learning applicato alla diagnosi dei guasti
Marsciano – 15.09.2017 UniPG & IRIS
Slide 12
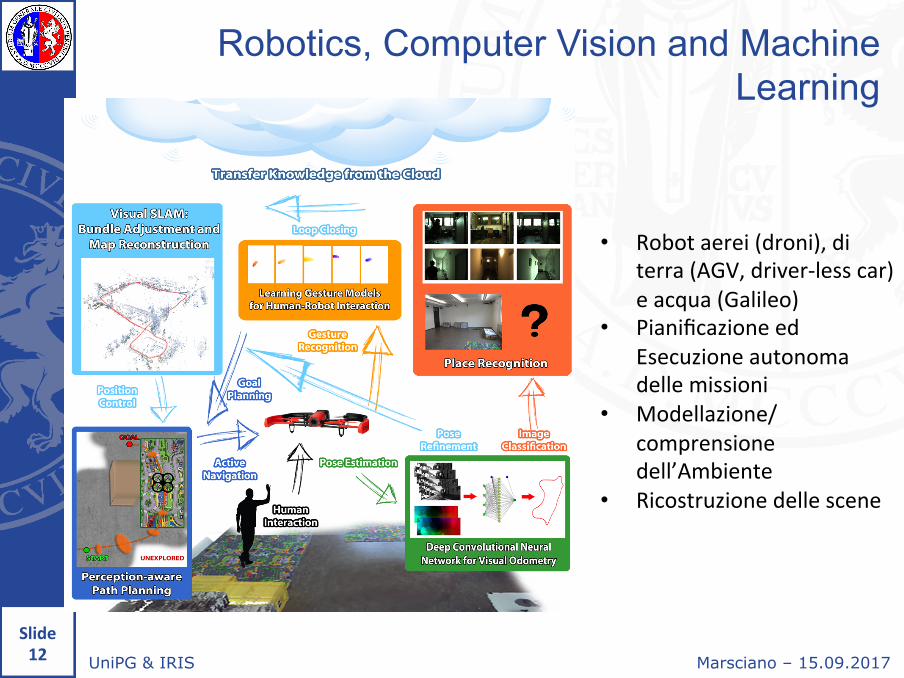
Robotics, Computer Vision and Machine Learning
• Robotaerei(droni),diterra(AGV,driver-lesscar)eacqua(Galileo)
• PianificazioneedEsecuzioneautonomadellemissioni
• Modellazione/comprensionedell’Ambiente
• Ricostruzionedellescene
Marsciano – 15.09.2017 UniPG & IRIS

Slide 13
Riconoscimento e tracciamento di oggetti
I rilevatori di oggetti basati su reti neurali profonde (Deep Neural Networks) funzionano bene anche con condizioni ambientali mutevoli. Le funzioni di rilevamento e tracciamento sono fondamentali per sistemi a guida autonoma (evitare ostacoli, aggirarli, scavalcarli, fermare il mezzo, …).
Marsciano – 15.09.2017 UniPG & IRIS
Slide 14
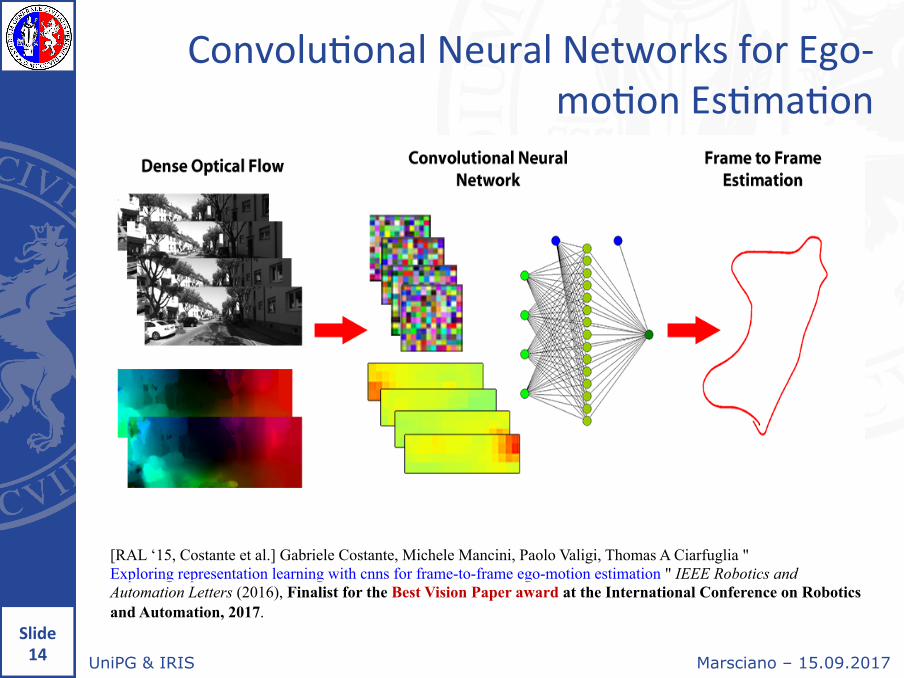
Convolu>onalNeuralNetworksforEgo-mo>onEs>ma>on
[RAL ‘15, Costante et al.] Gabriele Costante, Michele Mancini, Paolo Valigi, Thomas A Ciarfuglia "Exploring representation learning with cnns for frame-to-frame ego-motion estimation " IEEE Robotics and Automation Letters (2016), Finalist for the Best Vision Paper award at the International Conference on Robotics and Automation, 2017.
Marsciano – 15.09.2017 UniPG & IRIS

Slide 15
Team
Prof.PaoloValigiFullProfessor
HeadofSIRALab
Prof.MarioLucaFravolini
AssociatedProfessor Dr.ElisaRicci
SeniorResearcher Dr.FortunatoBianconi
SeniorResearcher Dr.ThomasCiarfuglia
Post-DocResearcher
Dr.GabrieleCostante Post-DocResearcher
Dr.LorenzoPorzi PhDStudent
Dr.MicheleMancini ResearchAssistant Dr.FrancescoCroceN
ResearchAssistant
Dr.AntonioFicola SeniorResearcher
Dr.SilviaCascianelli PhDStudent
Dr.EnricoBellocchio ResearchAssistant
Marsciano – 15.09.2017 UniPG & IRIS

Slide 16
Contacts
Website:isarlab.unipg.itProf.PaoloValigi:• Email:[email protected]• Phone:+39-075-585-3684
Marsciano – 15.09.2017 UniPG & IRIS


















