
Indoor positioning
25
Indoor Positioning Prepared by: Doaa Gamal Lecturer Assistant Faculty of Engineering – Suez Canal University 1
-
Upload
electronics-communication-staff-scu-suez-canal-university -
Category
Engineering
-
view
819 -
download
0
Transcript of Indoor positioning

Indoor Positioning
Prepared by:
Doaa Gamal
Lecturer Assistant
Faculty of Engineering – Suez Canal University1
Outline
• Outdoor Positioning
• Why indoor positioning needs new technology
• User requirements
• Positioning Methods
• SURVEY OF SYSTEMS for indoor positioning
• Indoor positioning on smartphones (WIFISLAM )
• Qualcomm solution
2
Outdoor Positioning
Developed and maintained by the US Department
of Defense (DOD)
Officially known as the NAVSTAR System
(Navigation Satellite Timing and Ranging).
3
History of GPS
Outdoor Positioning
1969—Defense Navigation Satellite System
(DNSS) formed
1973—NAVSTAR Global Positioning System
developed
1978—first 4 satellites
4
History of GPS

Outdoor Positioning
• 1993—24th satellite launched; initial operational
capability
• 1995—full operational capability
• May 2000—Military accuracy available to all users
5
History of GPS

Outdoor Positioning
6
Outdoor Positioning
Differential GPS (DGPS)
Inertial Navigation Systems (INS)
Assisted GPS (AGPS)
7
GPS accuracy enhancement

Why indoor positioning needs new
technology
• Non‐Line‐of‐Sight (NLoS) conditions
• Severe multipath and signal scattering
• high attenuation
• fast temporal changes due to the presence of people
and opening of doors
• high demand for precision and accuracy
8
User requirements (application
requirements)
• accuracy
• coverage area
• cost
• robustness
• scalability
• number of users
9
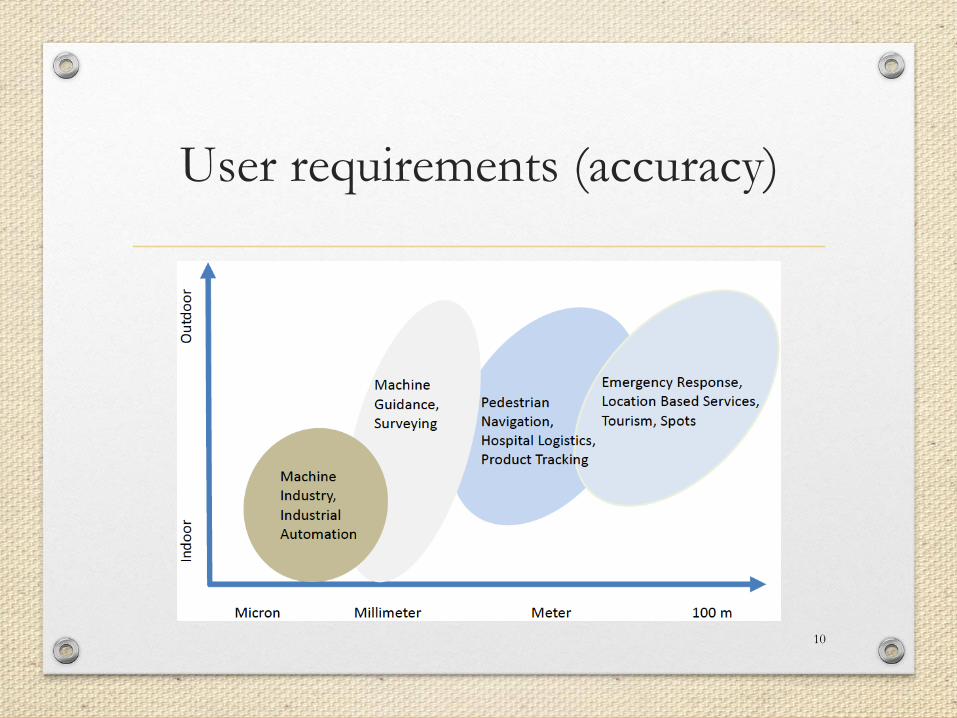
User requirements (accuracy)
10
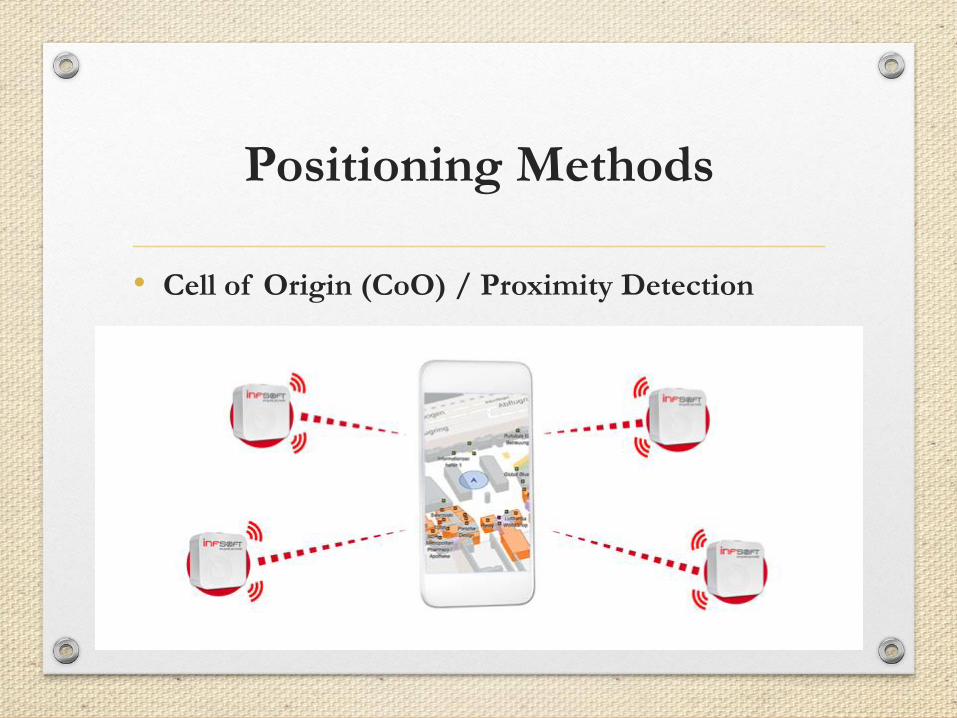
Positioning Methods
• Cell of Origin (CoO) / Proximity Detection
11
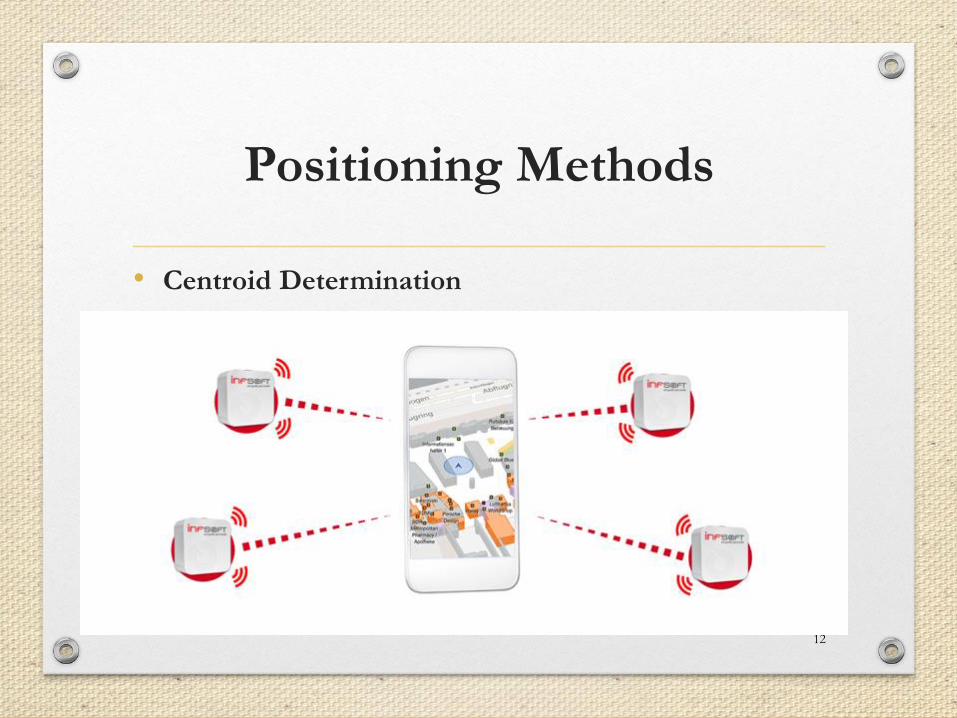
Positioning Methods
• Centroid Determination
12
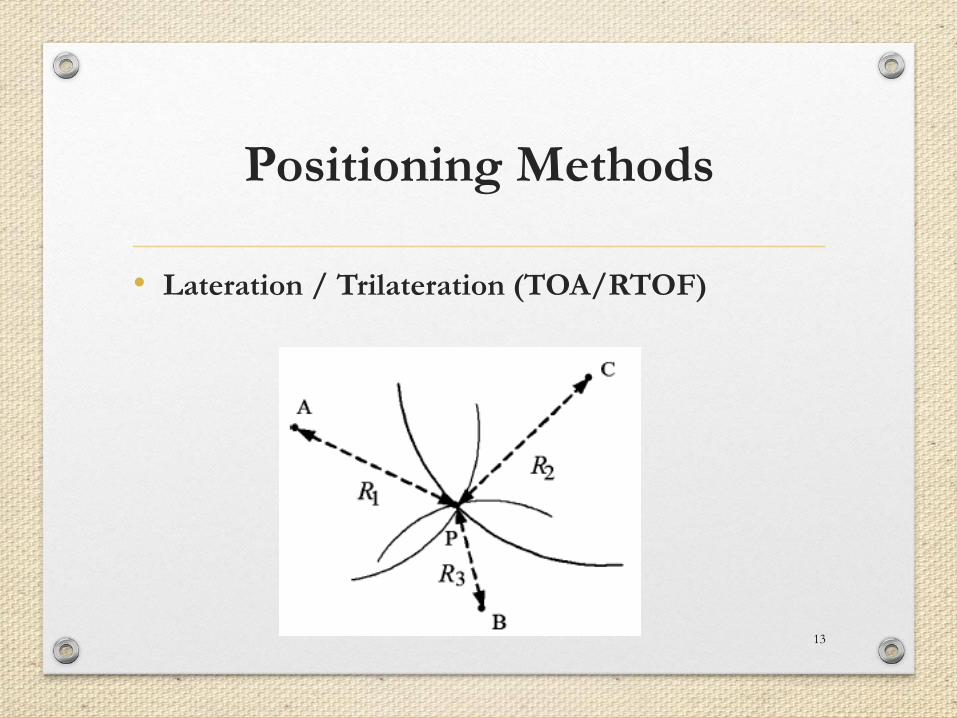
Positioning Methods
• Lateration / Trilateration (TOA/RTOF)
13
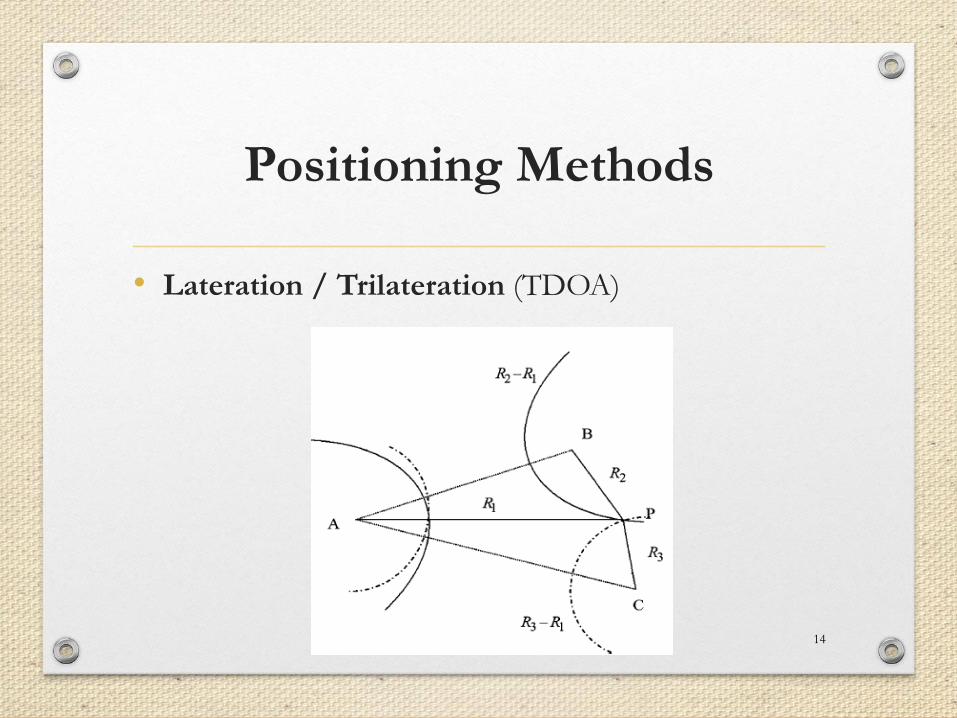
Positioning Methods
• Lateration / Trilateration (TDOA)
14
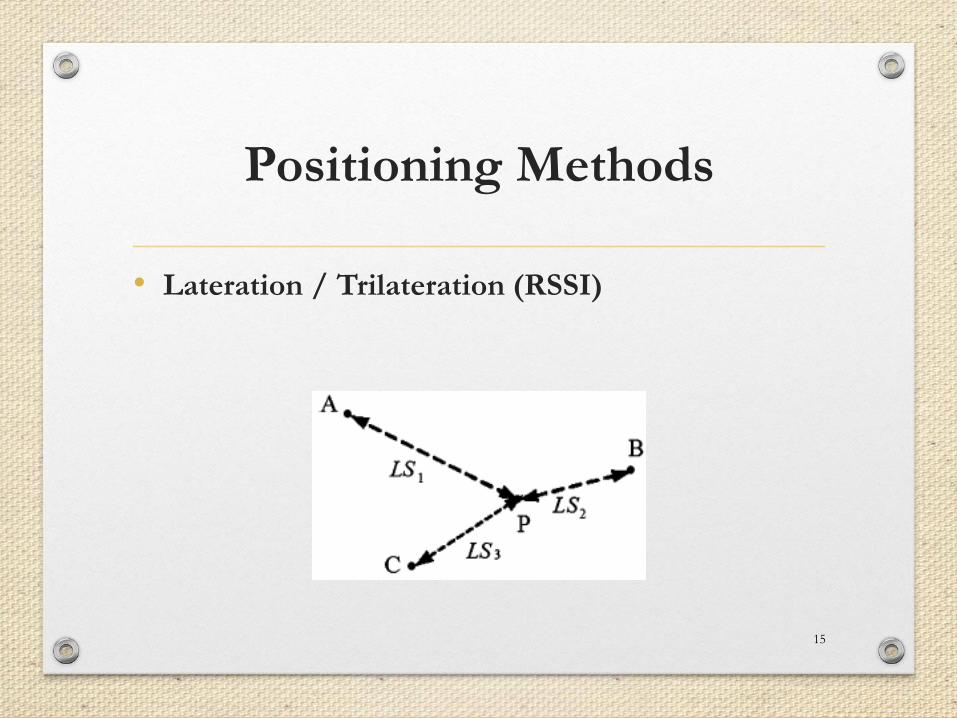
Positioning Methods
• Lateration / Trilateration (RSSI)
15
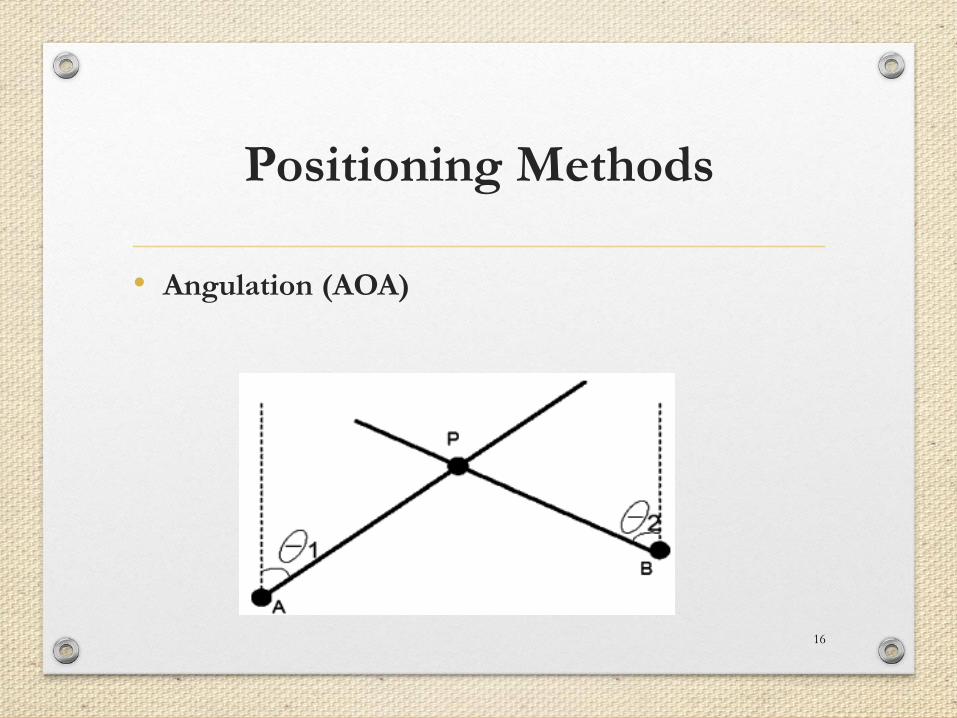
Positioning Methods
• Angulation (AOA)
16
Positioning Methods
• Fingerprinting (FP) / Scene Analysis
• Dead Reckoning (DR)
17
SURVEY OF SYSTEMS FOR
INDOOR POSITIONING
18
Using electromagnetic waves
• GPS-based (A-GPS)
• Cellular-based
• UWB
• WLAN
• Bluetooth
• RFID

SURVEY OF SYSTEMS FOR
INDOOR POSITIONING
19
Other techniques
• inertial navigation
• Ultra-sound
• Visible and infrared waves
20
Indoor positioning on
smartphones
• Accelerometer
• gyroscope
• magnetometer
• barometer (iphone6)
21
Sensors in Iphones
Indoor positioning on
smartphones (WIFISLAM )
• using only ambient Wi-Fi signals (RSSI) and mobilesensors
• Requires an initial fingerprinting of a building
• RSSI signature map is used then to localize a mobiledevice by comparing the measurements it makesagainst the map.
• 2.5m accuracy
22
Indoor positioning (Qualcomm)
• using only ambient Wi-Fi signals (RSSI) and mobile
sensors and map constraints
• Uses model-based approach
• 2m accuracy
23
References
• Liu Et Al.: Survey Of Wireless Indoor Positioning TechniquesAnd Systems, Ieee Transactions On Systems, Man, AndCybernetics—part C: Applications And Reviews, Vol. 37, No.6, November 2007
• Naguib, Ayman, et al. "Scalable and accurate indoorpositioning on mobile devices." Indoor Positioning andIndoor Navigation (IPIN), 2013 International Conference on.IEEE, 2013.
• R. Mautz, “Indoor positioning technologies,” 2012,habilitation thesis, ETH Zurich
24



















