IN5240 Passive Filters Part 1: State-space Orthonormal Filters...Institutt for Informatikk IN5240...
29
Institutt for Informatikk IN5240 Passive Filters Part 1: State-space Orthonormal Filters Sumit Bagga * and Dag T. Wisland ** * Staff IC Design Engineer, Novelda AS ** CTO, Novelda AS
Transcript of IN5240 Passive Filters Part 1: State-space Orthonormal Filters...Institutt for Informatikk IN5240...

Institutt for Informatikk
IN5240 Passive Filters Part 1:
State-space Orthonormal Filters
Sumit Bagga* and Dag T. Wisland**
*Staff IC Design Engineer, Novelda AS**CTO, Novelda AS

Institutt for Informatikk
A filter has been best defined as a linear 2-port frequency selective device intended to reject (ideally reduce to zero) certain signal components (stopband), while amplifying certain others (passband).
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga
Filter Definition

Institutt for Informatikk
Analog Filter Synthesis:Overview
• Approximating transfer function or data set must lead
to a physically realizable network that is dynamically
stable
• Transfer function, !(#)à silicon
– Step 1: Choose state-space representation
– Step 2: State-space is optimized for dynamic range,
sensitivity and sparsity by scaling the coefficients of the
individual matrices
• Filter optimized for DR à optimized for sensitivity
IN5240: Design of CMOS RF-Integrated
Circuits, Dag T. Wisland and Sumit Bagga

Institutt for Informatikk
Orthonormal Ladder Formby David A. Johns
• Semi-optimized for dynamic range and least sensitive to mismatch and component variations [Groenewold].
• e.g., Orthonormal band-reject filter (BRF) as a transformer-C ladder
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga

Institutt for Informatikk
Design MetricsNUMERICAL APPROXIMATION 118
Table 6.1: Typical filter design specifications
Specification Units
Pass/stopband frequency Hz
Passband ripple (maximum) dB
Stopband attenuation (minimum) dB
Because of fast, cheap computational methods, which eÆortlessly supply order-based coe±cients for a normalized low-pass filter (LPF), engineers have becomehandicapped to a small set (e.g., Butterworth, Elliptic, Chebyshev, Bessel, anda few others) of filter types based on conventional deterministic methods to syn-thesize a transfer function optimized only in the frequency domain. This resultsin a vast space of filter coe±cients unexplored. Table 6.2 highlights the intrinsicproperties of the diÆerent filter types that are commonly used.
Table 6.2: Filter types and their characteristic(s)
Filter Type Characteristic(s)
Butterworth Passband response with maximal flatness
Chebyshev Steeper transition from pass-to-stopband; larger phase distortion(wrt Butterworth)
Elliptic Ripple in pass and stopband, transmission zeros; steepertransition from pass-to-stopband; larger phase distortion (wrtChebyshev)
Bessel Constant group delay (wrt Butterworth); less steep transition frompass-to-stopband (wrt Chebyshev)
We propose a generic methodology for filter approximation, while orthogonallyoptimizing both the time and/or frequency domain responses (see Fig. 6.3). Arational approximation technique that has proven to be successful for synthesizingimpulse responses of arbitrary transfer functions, is the Pade approximation ofthe Laplace transformed impulse response. In the S-domain, substituting j! fors, the frequency/phase response is derived and then optimized, as the Laplacetransform has a one-to-one mapping to the frequency domain.
We begin by investigating polynomial approximations and then quickly moveonto rational approximations, as the latter are physically realizable.
6.2.1 Polynomial approximationIn analog filter synthesis the approximating function or data set must lead to a re-alizable network, which is also stable. To achieve a reasonable approximation to agiven function, f(x) that is continuous in a given interval a ∑ x ∑ b, by some poly-
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga

Institutt for Informatikk
Classical Filter Types
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga
NUMERICAL APPROXIMATION 118
Table 6.1: Typical filter design specifications
Specification Units
Pass/stopband frequency Hz
Passband ripple (maximum) dB
Stopband attenuation (minimum) dB
Because of fast, cheap computational methods, which eÆortlessly supply order-based coe±cients for a normalized low-pass filter (LPF), engineers have becomehandicapped to a small set (e.g., Butterworth, Elliptic, Chebyshev, Bessel, anda few others) of filter types based on conventional deterministic methods to syn-thesize a transfer function optimized only in the frequency domain. This resultsin a vast space of filter coe±cients unexplored. Table 6.2 highlights the intrinsicproperties of the diÆerent filter types that are commonly used.
Table 6.2: Filter types and their characteristic(s)
Filter Type Characteristic(s)
Butterworth Passband response with maximal flatness
Chebyshev Steeper transition from pass-to-stopband; larger phase distortion(wrt Butterworth)
Elliptic Ripple in pass and stopband, transmission zeros; steepertransition from pass-to-stopband; larger phase distortion (wrtChebyshev)
Bessel Constant group delay (wrt Butterworth); less steep transition frompass-to-stopband (wrt Chebyshev)
We propose a generic methodology for filter approximation, while orthogonallyoptimizing both the time and/or frequency domain responses (see Fig. 6.3). Arational approximation technique that has proven to be successful for synthesizingimpulse responses of arbitrary transfer functions, is the Pade approximation ofthe Laplace transformed impulse response. In the S-domain, substituting j! fors, the frequency/phase response is derived and then optimized, as the Laplacetransform has a one-to-one mapping to the frequency domain.
We begin by investigating polynomial approximations and then quickly moveonto rational approximations, as the latter are physically realizable.
6.2.1 Polynomial approximationIn analog filter synthesis the approximating function or data set must lead to a re-alizable network, which is also stable. To achieve a reasonable approximation to agiven function, f(x) that is continuous in a given interval a ∑ x ∑ b, by some poly-

Institutt for Informatikk
NU
ME
RIC
AL
AP
PR
OX
IMAT
ION
119
[h(t)]Explicit expression in time domain
Rational Approximation
[h(t)]
State-spaceOptimization
Chebyshev Knots
MiniMax(L∞)
Least-squared(L2) Padé
h(t) [h(t)]
Canonical(Modal/Controllable)
Hessenberg
Schur Orthonormal
Polynomial Approximation
Lagrange(Newton)
Natural Splines
Chebyshev Polynomial
Taylor Series*(Maclaurin)
Mapping onto Silicon
x'(t) = Ax(t)+Bu(t)
y(t) = Cx(t)+Du(t)
H(s): [h(t)]/Butterworth/Chebyshev/Elliptic
LPF/HPF/BPF/BRF
Step 2 Step 3 Step 4 Step 5
Xfmr-C Ladder Filter
Gm-CActive/Passive RLC
Impulse response(non-explicit)
Step 1
Data Set: (x1,y1), (x2,y2) … (xn,yn)
*Requires an explicit expression
H(s) = cT(sI-A)-1b+d
Laplace Transform
Figure 6.3: Analog filter synthesis
Analog Filter Synthesis:Approximation à Silicon
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga
NUMERICAL APPROXIMATION 121
degree all tied together. Instead of increasing the order of the function, we sim-ply augment several smaller polynomial pieces, which are used to construct thespline, thereby reducing the interpolation error. Note that for the same numberof coe±cients, an optimal rational function is able to achieve substantially higheraccuracy than an optimal polynomial approximation.
So, let h(t) be the impulse response of the low-pass prototype (LPP) filterto be approximated. The reason to apply rational approximation to the Laplacetransform (L ) of h(t) is that it immediately yields an expression (L(s)), which issuitable for implementation (i.e., one with both zeros (P (s)) and poles (Q(s))).If the rational transfer function has a numerator of order m and a denominator oforder n, then the original function can be approximated up to order (m + n + 1).Henceforth, we will only investigate approximating functions that are in rationalform.
6.2.2 Rational approximationSeveral mathematical techniques are frequently used to achieve the best rationalapproximation. These techniques measure the error of the approximant and thenthis error is minimized. Among them, the following are most notable.
MiniMax approximation
For the desired rational transfer function H(s), we have,
H(s) =P (s)Q(s)
=p0 + p1s + p2s2 + . . . + pmsm
q0 + q1s + q2s2 + . . . + qnsnº L(s) (6.4)
for a < s < b. For simplicity, we take q0 = 1.The unknown variables are p0, . . ., pm and q1, . . ., qn that is, (m + n + 1)
quantities in all. Let e(s) denote the deviation of H(s) from L(s), and let e denoteits maximum absolute value,
≤(s) = H(s)°L (h(t)), where ≤ = maxa∑x∑b
|≤(s)|
The choice of p’s and q’s that minimize ≤(s), would lead to the ideal MiniMaxsolution.
Pade approximation
A Pade approximant forms a rational function, whose power series expansionagrees with a given power series to the highest possible order.
H(s) is said to be a Pade approximant to the series, T (s), when
T (s) =(m+n+1)X
k=0
≥L(s)k
k!sk +
L(s)(k+1)
(k + 1)!c(s)(s° s0)k
| z Rn
¥, (6.5)

Institutt for Informatikk
Numerical Approximation
• Use a mathematical technique (Lagrange, Taylor, Splines) à reasonable approximation to a given function, !(#) that is continuous in a given interval % ≤ # ≤ ' by some polynomial
• Runge’s phenomenon à oscillatory behavior at both ends of the interval [%, ']
• Spline (cubic) interpolation of windowed functions– Interpolating functions are piecewise polynomials of a lower
degree all tied together
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga

Institutt for Informatikk
Low-Pass Prototype (LPP) Filter
• ℎ($) be the impulse response of the LPP filter to be approximated
• Rational transfer function has a numerator of order & and a denominator of order '
• Apply rational approximation to the Laplace transform (ℒ) of ℎ($)àℒ()) ≈ + ) = -())//())– Unknown variables are 12, … , 15 and 72, … , 78 that
is, (& + ' + 1) quantities; 72 = 1
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga

Institutt for Informatikk
Rational Approximation
• MiniMax
• Padé
• Least-squared (!")
IN5240: Design of CMOS RF-Integrated
Circuits, Dag T. Wisland and Sumit Bagga
NUMERICAL APPROXIMATION 121
degree all tied together. Instead of increasing the order of the function, we sim-ply augment several smaller polynomial pieces, which are used to construct thespline, thereby reducing the interpolation error. Note that for the same numberof coe±cients, an optimal rational function is able to achieve substantially higheraccuracy than an optimal polynomial approximation.
So, let h(t) be the impulse response of the low-pass prototype (LPP) filterto be approximated. The reason to apply rational approximation to the Laplacetransform (L ) of h(t) is that it immediately yields an expression (L(s)), which issuitable for implementation (i.e., one with both zeros (P (s)) and poles (Q(s))).If the rational transfer function has a numerator of order m and a denominator oforder n, then the original function can be approximated up to order (m + n + 1).Henceforth, we will only investigate approximating functions that are in rationalform.
6.2.2 Rational approximationSeveral mathematical techniques are frequently used to achieve the best rationalapproximation. These techniques measure the error of the approximant and thenthis error is minimized. Among them, the following are most notable.
MiniMax approximation
For the desired rational transfer function H(s), we have,
H(s) =P (s)Q(s)
=p0 + p1s + p2s2 + . . . + pmsm
q0 + q1s + q2s2 + . . . + qnsnº L(s) (6.4)
for a < s < b. For simplicity, we take q0 = 1.The unknown variables are p0, . . ., pm and q1, . . ., qn that is, (m + n + 1)
quantities in all. Let e(s) denote the deviation of H(s) from L(s), and let e denoteits maximum absolute value,
≤(s) = H(s)°L (h(t)), where ≤ = maxa∑x∑b
|≤(s)|
The choice of p’s and q’s that minimize ≤(s), would lead to the ideal MiniMaxsolution.
Pade approximation
A Pade approximant forms a rational function, whose power series expansionagrees with a given power series to the highest possible order.
H(s) is said to be a Pade approximant to the series, T (s), when
T (s) =(m+n+1)X
k=0
≥L(s)k
k!sk +
L(s)(k+1)
(k + 1)!c(s)(s° s0)k
| z Rn
¥, (6.5)
NUMERICAL APPROXIMATION 121
degree all tied together. Instead of increasing the order of the function, we sim-ply augment several smaller polynomial pieces, which are used to construct thespline, thereby reducing the interpolation error. Note that for the same numberof coe±cients, an optimal rational function is able to achieve substantially higheraccuracy than an optimal polynomial approximation.
So, let h(t) be the impulse response of the low-pass prototype (LPP) filterto be approximated. The reason to apply rational approximation to the Laplacetransform (L ) of h(t) is that it immediately yields an expression (L(s)), which issuitable for implementation (i.e., one with both zeros (P (s)) and poles (Q(s))).If the rational transfer function has a numerator of order m and a denominator oforder n, then the original function can be approximated up to order (m + n + 1).Henceforth, we will only investigate approximating functions that are in rationalform.
6.2.2 Rational approximationSeveral mathematical techniques are frequently used to achieve the best rationalapproximation. These techniques measure the error of the approximant and thenthis error is minimized. Among them, the following are most notable.
MiniMax approximation
For the desired rational transfer function H(s), we have,
H(s) =P (s)Q(s)
=p0 + p1s + p2s2 + . . . + pmsm
q0 + q1s + q2s2 + . . . + qnsnº L(s) (6.4)
for a < s < b. For simplicity, we take q0 = 1.The unknown variables are p0, . . ., pm and q1, . . ., qn that is, (m + n + 1)
quantities in all. Let e(s) denote the deviation of H(s) from L(s), and let e denoteits maximum absolute value,
≤(s) = H(s)°L (h(t)), where ≤ = maxa∑x∑b
|≤(s)|
The choice of p’s and q’s that minimize ≤(s), would lead to the ideal MiniMaxsolution.
Pade approximation
A Pade approximant forms a rational function, whose power series expansionagrees with a given power series to the highest possible order.
H(s) is said to be a Pade approximant to the series, T (s), when
T (s) =(m+n+1)X
k=0
≥L(s)k
k!sk +
L(s)(k+1)
(k + 1)!c(s)(s° s0)k
| z Rn
¥, (6.5)
NUMERICAL APPROXIMATION 122
ifH(0) = T (0),
and alsodk
dskH(s)|s =
dk
dskT (s)|s, for k = 0, 1, . . . , (m + n + 1)
where c(s) lies in interval [a, b] and Rn is the remainder term. A Taylor seriesexpanded about s = 0 is known as the Maclarin series.
To calculate the unknowns p0, . . ., pm and q0, . . ., qn, we formulate (m +n + 1) equations, by equating (6.4) with (6.5), then multiplying both by P (s),and equating all powers of s that have either p’s or q’s in their coe±cients. Withthis procedure, the Pade approximant to H(s) is derived.
Least-squared approximation (L2)
The L2 approximation (l(t)) tries to minimize the norm of the diÆerence betweenthe given function and the approximation (i.e., minimizing the least-mean-square-error (LMSE)).
According to Parseval’s identity,Z 1
0[l(t)° h(t)]2dt =
12º
Z 1
°1|L(j!)°H(j!)|2d!, (6.6)
the L2 criterion is equivalent in both time and frequency domains.The continuous L2 approximation is defined as,
@
@ck
Zb
a
(L(s)°H(s))2 ds, for k = 1, 2, . . . , (m + n) (6.7)
Note that from a numerical point of view, fitting data points (in discretizedform) is least favorable, especially when the data set is large. The L2 or theMiniMax are most favorable as they are not bound to or around a single point,as in the case of the Pade approximation.
6.2.3 Error termThe error in the frequency domain of the approximating functions is generallydefined as
≤(s) = |L(s)°H(s)|
for (a < s < b).In order to minimize the error, the coe±cient values, pi and qi of the approxi-
mated function are chosen accordingly. There are many ways to make the errorterm small, such as
NUMERICAL APPROXIMATION 122
ifH(0) = T (0),
and alsodk
dskH(s)|s =
dk
dskT (s)|s, for k = 0, 1, . . . , (m + n + 1)
where c(s) lies in interval [a, b] and Rn is the remainder term. A Taylor seriesexpanded about s = 0 is known as the Maclarin series.
To calculate the unknowns p0, . . ., pm and q0, . . ., qn, we formulate (m +n + 1) equations, by equating (6.4) with (6.5), then multiplying both by P (s),and equating all powers of s that have either p’s or q’s in their coe±cients. Withthis procedure, the Pade approximant to H(s) is derived.
Least-squared approximation (L2)
The L2 approximation (l(t)) tries to minimize the norm of the diÆerence betweenthe given function and the approximation (i.e., minimizing the least-mean-square-error (LMSE)).
According to Parseval’s identity,Z 1
0[l(t)° h(t)]2dt =
12º
Z 1
°1|L(j!)°H(j!)|2d!, (6.6)
the L2 criterion is equivalent in both time and frequency domains.The continuous L2 approximation is defined as,
@
@ck
Zb
a
(L(s)°H(s))2 ds, for k = 1, 2, . . . , (m + n) (6.7)
Note that from a numerical point of view, fitting data points (in discretizedform) is least favorable, especially when the data set is large. The L2 or theMiniMax are most favorable as they are not bound to or around a single point,as in the case of the Pade approximation.
6.2.3 Error termThe error in the frequency domain of the approximating functions is generallydefined as
≤(s) = |L(s)°H(s)|
for (a < s < b).In order to minimize the error, the coe±cient values, pi and qi of the approxi-
mated function are chosen accordingly. There are many ways to make the errorterm small, such as

Institutt for Informatikk
MSE vs RMSE
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga
NUMERICAL APPROXIMATION 123
(a) minimizeZ
b
a
≤(s)ds
(b) minimize maxa∑s∑b
≤(s)
(c) minimize
s1
(b° a)
Zb
a
≤2(s)ds
Depending on the type of waveform to be approximated, it is generally consi-dered that the best criterion but may be the most awkward (c), whereas the theleast satisfactory criterion may be the easiest to use (a or b).
As c is the most appropriate, the error term is squared and either the meansquare error (MSE) or the root mean square error (RMSE) can be used to mea-sure the amount of residual variance. When the MSE is used (typically done withprobability verifications), it may give the impression that the approximant is moreaccurate than it actually is. On the other hand, the RMSE closely resembles theaverage error and gives a better indication as to how far oÆ the approximant actu-ally is (quantitatively). Moreover, the rank among several approximants remainsunaltered when taking the square root. The RMSE in most cases will give anumber slightly higher than the average error, with the MSE being significantlylower.
Employing the L2 approximation, a transfer function of a desired wavelet baseis derived.
6.2.4 Wavelets
Crude wavelets
As seen in Chapter 2, the Gaussian pulse (g(t)) achieves the minimum time-bandwidth product (¢t¢f = 1/2), therefore it is neither time nor frequencylimited. This is an underlying property exploited in pulse based radios usedlocalization and ranging.
g(t) =1p2º
exp°t2
2
G(f) = exp°f2
2
However, the spectrum of the Gaussian waveform (G(f)) exhibits poor spectrale±ciency, which apparently is paramount to ultra-wideband radios transmittingat very low EIRP levels. Henceforth, keeping in mind spectrum e±ciency, we willexplore the properties of wavelets with ‘brickwall’ like frequency spectrums.

Institutt for Informatikk
Wavelets
Wave-like oscillation à starts at time 0 à ↑à↓à 0• Gaussian pulse
• ½ time-frequency product à localization and ranging • Poor spectrum efficiency • ‘Brickwall’ wavelets à maximum spectral coverage
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga
NUMERICAL APPROXIMATION 123
(a) minimizeZ
b
a
≤(s)ds
(b) minimize maxa∑s∑b
≤(s)
(c) minimize
s1
(b° a)
Zb
a
≤2(s)ds
Depending on the type of waveform to be approximated, it is generally consi-dered that the best criterion but may be the most awkward (c), whereas the theleast satisfactory criterion may be the easiest to use (a or b).
As c is the most appropriate, the error term is squared and either the meansquare error (MSE) or the root mean square error (RMSE) can be used to mea-sure the amount of residual variance. When the MSE is used (typically done withprobability verifications), it may give the impression that the approximant is moreaccurate than it actually is. On the other hand, the RMSE closely resembles theaverage error and gives a better indication as to how far oÆ the approximant actu-ally is (quantitatively). Moreover, the rank among several approximants remainsunaltered when taking the square root. The RMSE in most cases will give anumber slightly higher than the average error, with the MSE being significantlylower.
Employing the L2 approximation, a transfer function of a desired wavelet baseis derived.
6.2.4 Wavelets
Crude wavelets
As seen in Chapter 2, the Gaussian pulse (g(t)) achieves the minimum time-bandwidth product (¢t¢f = 1/2), therefore it is neither time nor frequencylimited. This is an underlying property exploited in pulse based radios usedlocalization and ranging.
g(t) =1p2º
exp°t2
2
G(f) = exp°f2
2
However, the spectrum of the Gaussian waveform (G(f)) exhibits poor spectrale±ciency, which apparently is paramount to ultra-wideband radios transmittingat very low EIRP levels. Henceforth, keeping in mind spectrum e±ciency, we willexplore the properties of wavelets with ‘brickwall’ like frequency spectrums.

Institutt for Informatikk
Daubechies’ wavelet
• Window-like functions in the frequency domain
• Faster passband-to-stopband transition àDaubechies’ wavelet approximated at higher scales– e.g., 7th-order nontrivial low-pass transfer function of
the Daubechies’ scaling function w/ zeros in RHP
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga
NUMERICAL APPROXIMATION 124
Daubechies’ wavelet
In literature, it is seen that one of the most attractive qualities of Daubechies’wavelets [5] (see Fig. 6.5) is that they have window-like functions in the frequencydomain. This characteristic accounts for their unique localization property. The-refore, the Daubechies’ wavelet may be used as the transmission medium in pulse-based radios. Moreover, the Daubechies’ wavelet is the Haar wavelet if the lengthof the filter, N , is 2. This wavelet is both orthogonal and causal with N
2 ° 1vanishing points. As N increases, a higher degree of smoothness is achieved.
Note that for faster passband-to-stopband transition, we approximate the Dau-bechies’ wavelet at higher scales (see Fig. 6.6(a), 6.6(b)).
To compare the L2 with the Pade and the MiniMax approximations, the RMSEfor both the Gaussian and Daubechies’ scaling functions are plotted in Fig. 6.7(a)and Fig. 6.7(b). The L2 and/or MiniMax approximants yield superior results ascompared to Pade as neither is bound to a single point.
A 7th-order nontrivial low-pass transfer function of the Daubechies’ scalingfunction (see Fig. 6.8) is adopted and is
H(s) = L2s,m, n
=0.07s5 + 3s4 + 55s3 + 416s2 + 2.3e3s + 13.9e3
s7 + 13s6 + 133s5 + 8.6e2s4 + 4.2e3s3 + 13.9e3s2 + 27.8e3s + 27.8e3
where the approximation is of degree (5, 7).For superior approximation, this transfer function has zeros in the right-hand-
plane (RHP) (Table 6.3).
-1
-0.75
-0.5
-0.25
0
0.25
0.5
0.75
1
0 2 4 6 8 10
Ma
gn
itud
e
Time [s]
Scaling FunctionMother Wavelet
Figure 6.5: Daubechies’ scaling and mother wavelet

Institutt for Informatikk
Daubechies’ WaveletScale 2 and 7
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga
NUMERICAL APPROXIMATION 125
-0.5
-0.25
0
0.25
0.5
0.75
1
1.25
1.5
0 1 2 3 4 5 6
Magnitu
de
Time [s]
Scale 2Scale 7
(a)
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
Magnitu
de
Frequency [Hz]
Scale 2Scale 7
(b)
Figure 6.6: a) Time and b) frequency response of the Daubechies’ scaling function atscale 2 and 7
STATE SPACE MODELS AND THE ORTHONORMAL FORM 127
-0.25
0
0.25
0.5
0.75
1
0 0.2 0.4 0.6 0.8 1 1.2
Magnitu
de
Time [ns]
7th-order Approx.Ideal
Figure 6.8: 7th-order approximation of the Daubechies’ scaling function
Table 6.3: Zeros of H(s)
Zeros Value Location
z1 -3.2086 Real
z2 4.417-10.410j RHP
z3 4.418+10.410j LHP
z4 19.30-11.360j RHP
z5 19.30+11.360j LHP
In order to map the Daubechies’ scaling function transfer function onto silicon,a state space description is adopted.
6.3 State Space Models and the Orthonormal FormBefore we transform our transfer function into a state space model, some basicfundamentals are covered.
6.3.1 FundamentalsA linear single-input, single-output (SISO) can be described as
x(t) = Ax(t) + Bu(t), x(0) = x0 (6.8)y(t) = Cx(t) + Du(t)

Institutt for Informatikk
Daubechies’ WaveletRMSE
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga
NUMERICAL APPROXIMATION 126
10-3
10-2
10-1
4 5 6 7 8
RM
SE
Order
L2MiniMaxPade
(a)
10-2
10-1
100
4 5 6 7 8
RM
SE
Order
L2MiniMaxPade
(b)
Figure 6.7: RMSE for a) Gaussian and b) Daubechies’ scaling functions

Institutt for Informatikk
7th-Order Approximation of the Daubechies’ Wavelet
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga
STATE SPACE MODELS AND THE ORTHONORMAL FORM 127
-0.25
0
0.25
0.5
0.75
1
0 0.2 0.4 0.6 0.8 1 1.2
Ma
gn
itud
e
Time [ns]
7th-order Approx.Ideal
Figure 6.8: 7th-order approximation of the Daubechies’ scaling function
Table 6.3: Zeros of H(s)
Zeros Value Location
z1 -3.2086 Real
z2 4.417-10.410j RHP
z3 4.418+10.410j LHP
z4 19.30-11.360j RHP
z5 19.30+11.360j LHP
In order to map the Daubechies’ scaling function transfer function onto silicon,a state space description is adopted.
6.3 State Space Models and the Orthonormal FormBefore we transform our transfer function into a state space model, some basicfundamentals are covered.
6.3.1 FundamentalsA linear single-input, single-output (SISO) can be described as
x(t) = Ax(t) + Bu(t), x(0) = x0 (6.8)y(t) = Cx(t) + Du(t)

Institutt for Informatikk
State Space
• Transfer function à state space model (i.e., linear single-input, single-output (SISO)
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga
STATE SPACE MODELS AND THE ORTHONORMAL FORM 127
-0.25
0
0.25
0.5
0.75
1
0 0.2 0.4 0.6 0.8 1 1.2
Ma
gn
itu
de
Time [ns]
7th-order Approx.Ideal
Figure 6.8: 7th-order approximation of the Daubechies’ scaling function
Table 6.3: Zeros of H(s)
Zeros Value Location
z1 -3.2086 Real
z2 4.417-10.410j RHP
z3 4.418+10.410j LHP
z4 19.30-11.360j RHP
z5 19.30+11.360j LHP
In order to map the Daubechies’ scaling function transfer function onto silicon,a state space description is adopted.
6.3 State Space Models and the Orthonormal FormBefore we transform our transfer function into a state space model, some basicfundamentals are covered.
6.3.1 FundamentalsA linear single-input, single-output (SISO) can be described as
x(t) = Ax(t) + Bu(t), x(0) = x0 (6.8)y(t) = Cx(t) + Du(t)
STATE SPACE MODELS AND THE ORTHONORMAL FORM 128
where u(t) 2 < is the input signal, y(t) 2 < is the output signal and x(t) 2 <n isthe state vector or an internal variable (see Fig. 6.9).
u(t) y(t)xx.
x0
Figure 6.9: State space model
By definition, a state vector is a variable, which describes the observed statesof a system. The output of a system can be constructed by knowing the presentstate and future inputs and is
y(t1) = C expAt1 x0| z present
+Du(t1) + C
Zt1
0expA(t1°t) Bu(t)dt
| z future
(6.9)
As previously seen, the Laplace transform of a causal impulse response, h(t),(with zero initial conditions) yields a stable transfer function H(s). If the impulseresponse is expressed as
y(t) = D±(t) + C expAt B,
then the transfer function is
H(s) = D + C(sI °A)°1B
6.3.2 Transfer function to state space transformationIn control theory, a general transfer function, H(s), is described as
H(s) =Y (s)X(s)
=pmsm + pm°1sm°1 + ... + p1s + p0
qnsn + qn°1sn°1 + ... + q1s + q0(6.10)
where if m < n (or ord(Y ) < ord(X)), then the transfer function is said to be‘strictly proper’. If m = n then the H(s) is referred to as ‘proper’, but not ‘strictlyproper’. For the latter, partial fraction decomposition is used to reduce the orderof the numerator, so
STATE SPACE MODELS AND THE ORTHONORMAL FORM 128
where u(t) 2 < is the input signal, y(t) 2 < is the output signal and x(t) 2 <n isthe state vector or an internal variable (see Fig. 6.9).
u(t) y(t)xx.
x0
Figure 6.9: State space model
By definition, a state vector is a variable, which describes the observed statesof a system. The output of a system can be constructed by knowing the presentstate and future inputs and is
y(t1) = C expAt1 x0| z present
+Du(t1) + C
Zt1
0expA(t1°t) Bu(t)dt
| z future
(6.9)
As previously seen, the Laplace transform of a causal impulse response, h(t),(with zero initial conditions) yields a stable transfer function H(s). If the impulseresponse is expressed as
y(t) = D±(t) + C expAt B,
then the transfer function is
H(s) = D + C(sI °A)°1B
6.3.2 Transfer function to state space transformationIn control theory, a general transfer function, H(s), is described as
H(s) =Y (s)X(s)
=pmsm + pm°1sm°1 + ... + p1s + p0
qnsn + qn°1sn°1 + ... + q1s + q0(6.10)
where if m < n (or ord(Y ) < ord(X)), then the transfer function is said to be‘strictly proper’. If m = n then the H(s) is referred to as ‘proper’, but not ‘strictlyproper’. For the latter, partial fraction decomposition is used to reduce the orderof the numerator, so

Institutt for Informatikk
TF2SS
• " < $à transfer function is said to be ‘strictly proper’; " = $à ‘proper’
• & = [(, *; ,, -]– e.g., controllable/observable canonical form
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga
STATE SPACE MODELS AND THE ORTHONORMAL FORM 128
where u(t) 2 < is the input signal, y(t) 2 < is the output signal and x(t) 2 <n isthe state vector or an internal variable (see Fig. 6.9).
u(t) y(t)xx.
x0
Figure 6.9: State space model
By definition, a state vector is a variable, which describes the observed statesof a system. The output of a system can be constructed by knowing the presentstate and future inputs and is
y(t1) = C expAt1 x0| z present
+Du(t1) + C
Zt1
0expA(t1°t) Bu(t)dt
| z future
(6.9)
As previously seen, the Laplace transform of a causal impulse response, h(t),(with zero initial conditions) yields a stable transfer function H(s). If the impulseresponse is expressed as
y(t) = D±(t) + C expAt B,
then the transfer function is
H(s) = D + C(sI °A)°1B
6.3.2 Transfer function to state space transformationIn control theory, a general transfer function, H(s), is described as
H(s) =Y (s)X(s)
=pmsm + pm°1sm°1 + ... + p1s + p0
qnsn + qn°1sn°1 + ... + q1s + q0(6.10)
where if m < n (or ord(Y ) < ord(X)), then the transfer function is said to be‘strictly proper’. If m = n then the H(s) is referred to as ‘proper’, but not ‘strictlyproper’. For the latter, partial fraction decomposition is used to reduce the orderof the numerator, so
STATE SPACE MODELS AND THE ORTHONORMAL FORM 129
H(s) = 1 +pm°1sm°1 + ... + p1s + p0
qnsn + qn°1sn°1 + ... + q1s + q0(6.11)
where m ∑ n.The state space (S = [A,B; C, D]) realization of H(s) in companion or com-
monly referred to as controllable canonical form (see Fig. 6.10 for a 3rd-orderexample) is
∑A BC D
∏=
2
666664
0 1 · · · 0 0...
.... . .
......
0 0 · · · 1 0°q0 °q1 · · · °qn°1 1p0 p1 · · · pn°1 0
3
777775
∫u(t) ∫ p0 y(t)
q0
q1
p2
p1
x1x2
∫
q1
x3
Figure 6.10: Controllable canonical form
Through inspection of H(s), coe±cient values of the individual matrices (A°D) are calculated. Similarly, the observer or commonly referred to as the obser-vable canonical form (see Fig. 6.11 for a 3rd-order example) of H(s) is
∑A BC D
∏=
2
666664
°qn°1 1 · · · 0 pn°1...
.... . .
......
°q1 0 · · · 1 p1
°q0 0 · · · 0 p0
1 0 · · · 0 0
3
777775(6.12)

Institutt for Informatikk
STATE SPACE MODELS AND THE ORTHONORMAL FORM 129
H(s) = 1 +pm°1sm°1 + ... + p1s + p0
qnsn + qn°1sn°1 + ... + q1s + q0(6.11)
where m ∑ n.The state space (S = [A,B; C, D]) realization of H(s) in companion or com-
monly referred to as controllable canonical form (see Fig. 6.10 for a 3rd-orderexample) is
∑A BC D
∏=
2
666664
0 1 · · · 0 0...
.... . .
......
0 0 · · · 1 0°q0 °q1 · · · °qn°1 1p0 p1 · · · pn°1 0
3
777775
∫u(t) ∫ p0 y(t)
q0
q1
p2
p1
x1x2
∫
q1
x3
Figure 6.10: Controllable canonical form
Through inspection of H(s), coe±cient values of the individual matrices (A°D) are calculated. Similarly, the observer or commonly referred to as the obser-vable canonical form (see Fig. 6.11 for a 3rd-order example) of H(s) is
∑A BC D
∏=
2
666664
°qn°1 1 · · · 0 pn°1...
.... . .
......
°q1 0 · · · 1 p1
°q0 0 · · · 0 p0
1 0 · · · 0 0
3
777775(6.12)
Controllable Canonical Form
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga
STATE SPACE MODELS AND THE ORTHONORMAL FORM 129
H(s) = 1 +pm°1sm°1 + ... + p1s + p0
qnsn + qn°1sn°1 + ... + q1s + q0(6.11)
where m ∑ n.The state space (S = [A,B; C, D]) realization of H(s) in companion or com-
monly referred to as controllable canonical form (see Fig. 6.10 for a 3rd-orderexample) is
∑A BC D
∏=
2
666664
0 1 · · · 0 0...
.... . .
......
0 0 · · · 1 0°q0 °q1 · · · °qn°1 1p0 p1 · · · pn°1 0
3
777775
∫u(t) ∫ p0 y(t)
q0
q1
p2
p1
x1x2
∫
q1
x3
Figure 6.10: Controllable canonical form
Through inspection of H(s), coe±cient values of the individual matrices (A°D) are calculated. Similarly, the observer or commonly referred to as the obser-vable canonical form (see Fig. 6.11 for a 3rd-order example) of H(s) is
∑A BC D
∏=
2
666664
°qn°1 1 · · · 0 pn°1...
.... . .
......
°q1 0 · · · 1 p1
°q0 0 · · · 0 p0
1 0 · · · 0 0
3
777775(6.12)

Institutt for Informatikk
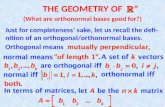
Orthonormal Ladder Form (1/2)
• Dynamic range, sensitivity and sparsity• " matrix is tridiagonal; nearly skew-symmetric except for
a single non-zero diagonal element
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga
STATE SPACE MODELS AND THE ORTHONORMAL FORM 130
u(t)
q0
∫
p0
q1
∫
p1 p2
y(t)x1x2 ∫
q2
Figure 6.11: Observable canonical form
6.3.3 Orthonormal ladder structureWhen designing higher-order filters, it is desirable to design circuits that are leastsensitive to mismatch and component variations. It is known that an optimaldynamic range system will also have optimal sensitivity [4]. The orthonormalladder structure, which is intrinsically insensitive to component variations, canbe adopted to improve upon the state-space matrices’ sparsity. The output ofthe filter is obtained from a linear combination of all the individual integratoroutputs.
Another useful property of orthonormal ladder filters is the ability to realizestable transfer functions. Arbitrary poles are realized using the ladder feedbackstructure, while transmission zeros are realized using an output summing stage.
Matrices A, B and C of this structure are given by,
A =
2
66666664
0 Æ1 . . . 0°Æ1 0 Æ2 . . . 0
°Æ2 0 Æ3 . . ....
. . .. . .
. . ....
0 . . . °Æn°2 0 Æn°1
0 . . . °Æn°1 Æn
3
77777775
B =
2
6666664
00...0qanº
3
7777775CT =
2
666664
c1c2...
cn°1
cn
3
777775
(6.13)
The A matrix is tridiagonal and is very nearly skew-symmetric except for asingle non-zero diagonal element. One important property of orthonormal ladder

Institutt for Informatikk
Orthonormal Ladder Form (2/2)
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga
.
a2 -aN-2 aN-1XN
.,I . . . . . . . ___12&iaN ’Ix2 XN-1 a _
Figure 2: Block diagram of an orthonomal ladder filter
Johns, Orthonormal Ladder Filters 1989

Institutt for Informatikk
Singly Terminated Ladder
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga
Rs = 1 rN
q-p- . . . . . . . ._qj+
1
Figure 1: A singly terminated ladder and its states
STATE SPACE MODELS AND THE ORTHONORMAL FORM 131
filters is the fact that the resulting circuits are inherently state scaled, i.e., thecontrollability gramian (K) is already a identity matrix. Thus, from the Lyapunovequations [3] matrix B results in an all zeros except for the N th element with bn
given byp
Ænº
. The drawback of this structure is that the system is not optimizedwith respect to its noise contribution (i.e., the observability gramian (W ) is nottransformed).
The coe±cients Æ are defined as,
Æi =
s1
riri+11 ∑ i < n;
Æn =1rn
i = n. (6.14)
where ri are the reactive components of a singly terminated LC ladder structure.In order to calculate the values of the reactive elements ri, we apply a continued
fraction expansion on the denominator of the transfer function H(s) = P (s)/Q(s).The denominator can be converted into a simple continued fraction by the follo-wing procedure. First, the polynomial Q(s) of degree n is represented by,
Q(s) = Qeven(s) + Qodd(s)
where Qeven(s) and Qodd(s) are the even and the odd parts of Q(s), respectively.Then, applying the ratio between both parts such that
Qcf (s) =Qeven(s)Qodd(s)
, if n is even
Qcf (s) =Qodd(s)Qeven(s)
, if n is odd
we end up with the continued fraction expansion of Q(s) as follows
Qcf (s) = r0 +1
r1 +1
. . . +1rn
= [r0; r1, . . . , rn] (6.15)
where ri are the integral parts of the intermediate fractions which defines thereactive components values.
To implement the numerator P (s) of the transfer function H(s), the properC matrix must be obtained. Using the intermediate functions Fi, coe±cients ci
can be written as,
P (s) = c1 · F1 + c2 · F2 + . . . + cn · Fn (6.16)

Institutt for Informatikk
Transformer-C Ladder
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga
DE
SIG
NE
XA
MP
LE
140
XN=IrN X2=Ir2r3
X1=Vr1
r1
c3
c2cN
±n2i2
±i3
±nNiN
c1
±i1
±i1±n2i2
±iN-1
±nNiN
Rs=1
Matrix: C
Matrix: C
Matrices: A & B(Strictly proper)
kN k2
rN r2
XN-1=VrN-1
rN-1
cN-1
±iN-1
I(s)1I(s)3I(s)N-1
I(s)2I(s)N
U(s)
Y(s)
H(s)=Y(s)U(s)-1
a b
Parallel Configuration
nNrN n2r2X3=Vr3
I-I I-I
V-I V-I V-I
Tap: current across primary winding
d1 V-I
Matrix: D (Non-strictly proper)
±id1
±id1
Inversion → Zeros in RHP
Current Amplifiers
Gm Amplifiers
Figure 6.18: Generic orthonormal transformer-C orthonormal state space filter

Institutt for Informatikk
7th-Order Transformer-C BRF
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga
ME
ASU
RE
ME
NT
RE
SU
LT
S14
2
I2r3 r1
Rs=50 k2
r2
r2Vr3 Vr1I4r5
k4
r4
r4Vr5I6r7
r6Vr7
Series Configuration
Zo
Tap: voltage difference across secondary windings (I(s)2±4)
Vo+ Vo-
H(s)1: Low-pass prototype (i.e., Daubechies’ scaling function)H(s)2: Low-pass to band-pass transformation
H(s)2±4: Composite band-pass/band-reject response (with notch @ )
H(s)1=Vin/Vr1Vin
H(s)2=Ir2/Vin
Figure 6.19: 7th-order orthonormal transformer-C state space band-reject filter

Institutt for Informatikk
130 nm CMOS
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga
MEASUREMENT RESULTS 143
of 1 nH. Each transformer has 3.5 turns, metal width of 10 µm, coil spacing of 5µm, inner dimension of 80 x 90 µm2, an overall dimension of 150 x 150 µm2 and acoupling coe±cient of 0.75. The on-chip capacitors (in the order of subpicofarads)are implemented in metal-7 and metal-8 using the metal-insulator-metal (MIM)structure.
Differential Splitter-Balun(5315A-104, 17 GHz
Picosecond Pulse Labs)
XFRM-C(Orthonormal state-space filter)
Vector Network Analyzer (37397D, 65 GHz
Anritsu)
vbias
Zi=50 Ω
Zo=50 Ω
Io+
Io-
Ii
Figure 6.20: Magnitude and phase measurement setup
LT = 1.5 mm
W = 0.75 m
m
L = 1.0 mm
Figure 6.21: Chip microphotograph of the 7th-order orthonormal transformer-C band-reject filter in 0.13 µm CMOS technology; active area is 0.15 mm2; (0.625 x 0.25) mm
The measurement setup and the chip microphotograph are shown in Fig. 6.20and Fig. 6.21, respectively. For diÆerential to single-ended conversion, an externalbalun with a bandwidth from 200 KHz to 17 GHz is connected at the output of thefilter. The key elements of this circuit are two high performance on-chip passivemulti-layer stacked planar transformers that act as the voltage-diÆerence sensingelements.

Institutt for Informatikk
Insertion Loss
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga
MEASUREMENT RESULTS 144
The measurement results show that the notch in the passband is approxi-mately located at the prescribed frequency. Fig. 6.22 and Fig. 6.23 show thesimulated and measured magnitude and phase response of the 7th-order ortho-normal state space band-reject filter realized in 0.13 µm CMOS IC technology.The desired U-NII co-existence criteria is satisfied, even though a 3 dB reductionin notch depth and a frequency shift of 100 MHz is observed. Measurements showa sharper roll-oÆ at higher frequencies than required by the FCC frequency mask.From inspection, we see that the insertion loss across the pass-band is inverselyproportional to the notch depth, for both the band-stop filter of Daido Steel (fa-bricated using LTCC technology) and our CMOS based transformer-C state spacefilter.
In the time domain, the measured and simulated impulse responses of thefilter vary by a fraction of a nanosecond (see Fig. 6.24). The measured responsesaccurately predict the behavior of this novel filter topology.
The interconnect length of the bond wire is about 500 µm, resulting in aseries inductance to the RF input/output of approximately 0.5 nH. To guaranteethat parasitic behavior does not influence the performance of the filter, at itsinput, multiple gold ball wire bond interconnects were placed in parallel duringpackaging. Moreover, the dimensions of each component is fine-tuned to have thecorrect passband insertion loss and stopband rejection, while taking into accounton-chip and oÆ-chip parasitic eÆects.
The specifications of the 7th-order orthonormal transformer-C band-reject fil-ter are highlighted in Table 6.5.
-35
-30
-25
-20
-15
-10
-5
0
2 3 4 5 6 7 8 9 10 11 12
Ga
in [
dB
]
Frequency [GHz]
MeasuredSimulated
Daido Steel: Safi-U N1
Figure 6.22: Magnitude response of the 7th-order orthonormal transformer-C statespace band-reject filter (without de-embedding)

Institutt for Informatikk
Performance Metrics
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga
FUTURE OUTLOOK 146
Table 6.5: Experimental results of the band-reject filter
Parameter Measured
Filter type Band-Reject
Order 7 (1x(IND); 2x(XFMR); 4x(MiMCAP))
Resistance(≠) 50 (off-chip)
Inductance(nH) r6=1; r4=2.2; r2=2.2
Capacitance(fF) r7=300; r5=825; r3=900; r1=350
Insertion loss -9 (LB), -8 (UB) dB
Bandwidth 2-4 GHz (LB), 6-9.5 GHz (UB)
Pulse width ∑ 0.5 ns (10-90%)
Notch depth 22 dB
Notch frequency 5.10 GHz
Turns ratio(n) ª 1
Coupling coeff.(k) 0.75
X2,4 Dimensions 150 x 150 µm2
Input/Output Single/Differential(50/100 ≠)
Active/Physical Area 0.156/0.75 mm2
Technology 0.13 µm CMOS IBM
6.6 Future OutlookIn this section, we propose multiple-input, multiple-out and high-pass prototypenetworks, which exploit the phenomenon of mutual coupling.
6.6.1 Fully differential passive networks
For fully diÆerential circuits, the high-performance and area-e±cient stacked in-ductor(s) and/or bifilar(s) are replaced with multifilament transformers as cur-rent/voltage sensing elements as shown in Fig. 6.25. To realize a diÆerentialladder structure, an inverting configuration is used, whereby the diÆerential cur-rents constructively reinforce each other. This increases the self-inductances of theprimary (Lp) and secondary (Ls) windings of the multifilament transformers. Inother words, Lp = Lp + M , where M = k
pLpLs denotes the mutual inductance
between the two windings.In Fig. 6.25, the voltage diÆerence at the desired nodes is sensed across the
primary/secondary windings of trifilars T2 and T4, and appear as a voltage acrosstheir tertiary wildings. The resulting voltages are then subtracted and a corres-ponding current is delivered to the load resistance, Zo.
Note that as a result of positive coupling, the self-inductances of the windingsis higher, and therefore the filter elements require re-scaling, for example
L§p
= kLp

Institutt for Informatikk
Homework Passive LPF in C-90
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga

Institutt for Informatikk
References1. D. A. Johns, W. M. Snelgrove, and A. S. Sedra,
“Orthonormal ladder filters,” IEEE Transactions on Circuits and Systems I: Fundamentals Theory and Applications, vol. 36, pp. 337–343, Mar. 1989.
2. G. Groenewold, “Optimal dynamic range integrators,” IEEE Transactions on Circuits and Systems I: Fundamentals Theory and Applications, vol. 39, no. 8, pp. 614–627, Aug. 1992.
3. S. Bagga, PhD Dissertation, 2009
IN5240: Design of CMOS RF-Integrated Circuits, Dag T. Wisland and Sumit Bagga