Improvement of the Camera Calibration through the...
52
IMPROVEMENT OF THE CAMERA CALIBRATION THROUGH THE USE OF MACHINE LEARNING TECHNIQUES BY SCOTT A. NICHOLS A THESIS PRESENTED TO THE GRADUATE SCHOOL OF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF SCIENCE UNIVERSITY OF FLORIDA 2001
Transcript of Improvement of the Camera Calibration through the...

IMPROVEMENT OF THE CAMERA CALIBRATIONTHROUGH THE USE OF MACHINE
LEARNING TECHNIQUES
BY
SCOTT A. NICHOLS
A THESIS PRESENTED TO THE GRADUATE SCHOOLOF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT
OF THE REQUIREMENTS FOR THE DEGREE OFMASTER OF SCIENCE
UNIVERSITY OF FLORIDA
2001

ii
ACKNOWLEDGMENTS
I wish to thank Dr. Antonio Arroyo for taking a long shot on an average undergrad. You have
my gratitude, and have helped me make much more of myself. I also wish to thank Dr. Michael
Nechyba for more things than I can enumerate here, but will make a half-hearted effort to. Thank
you for your patience; your service as an idea blackboard that corrects mistakes; your recommen-
dation of Danela’s Ristorante; oh yeah, and your patience. I also wish to thank the members of the
Machine Intelligence Lab that I have shared workbench space with over the years for ideas and
motivation.

TABLE OF CONTENTS
page
ACKNOWLEDGMENTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ii
ABSTRACT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
CHAPTERS
1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1 Computer Vision. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Camera Calibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 This Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 THE CAMERA MODEL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1 Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.2 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.3 Training the model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3 A SINGLE CAMERA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.1 Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.2 Training Edges . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.3 Optimization Criterion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.4 Initial Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123.5 Gradient Descent. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.6 Model Perturbation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.7 Gradient-Peturbation Hybrid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.8 Performance Comparisons . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4 STEREO CAMERAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.1 Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234.2 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244.3 Our Approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254.4 Training Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254.5 Model Improvement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
iii

5 FURTHER RESULTS AND DISCUSSION. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5.1 Single Camera. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305.2 Stereo Cameras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
APPENDICES
A VISUAL CALIBRATION EVALUATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
B GRAPHICAL CALIBRATION TOOL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
REFERENCES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
BIOGRAPHICAL SKETCH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
iv

v
LIST OF FIGURES
figure page
2-1 The Pinhole Model of Perspective Projection . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3-1 Example Training Edges . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3-2 Error Types of Initial Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3-3 Gradient Descent vs. Different Types of Error . . . . . . . . . . . . . . . . . . . . . . . . . 15
3-4 Stochastic Perturbation vs. Different Types of Error . . . . . . . . . . . . . . . . . . . . 16
3-5 Stochastic Perturbation with Adaptive Delta vs. Different Types of Error . . . . 17
3-6 Gradient-Perturbation Hybrid vs. Different Types of Error . . . . . . . . . . . . . . . 18
3-7 Performance Comparison for the Translational and Scale Initial Models. . . . . 20
3-8 Performance Comparison for the Close and Rotational Initial Models. . . . . . . 21
3-9 Final Models Using the Gradient - Perturbation Hybrid Technique . . . . . . . . . 22
4-1 Results for a Non-Weighted Model Improvement . . . . . . . . . . . . . . . . . . . . . . 27
4-2 Error Over Time for Various Gains on the Training Model . . . . . . . . . . . . . . . 28
4-3 The Long Term Performance using Various Gains . . . . . . . . . . . . . . . . . . . . . . 29
5-1 Example Single Camera Calibrations (1 & 2) . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5-2 Example Single Camera Calibrations (3 & 4) . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5-3 Example Single Camera Calibrations (5 & 6) . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5-4 Example Single Camera Calibrations (7 & 8) . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5-5 Poor Initial Calibrations (1 & 2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5-6 Poor Initial Calibrations (3 & 4) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5-7 Stereo Calibration Examples (1 & 2). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5-8 Stereo Calibration Examples (3 & 4). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
A-1 The Calibration Grid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
A-2 The Experimental Area . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
B-1 The Graphical Calibration Tool. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42

vi
LIST OF TABLES
table page
3-1 Model Perturbation: Average Error Per Pixel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3-2 Model Perturbation With Adaptive Delta: Average Error Per Pixel . . . . . . . . . . . . 19
3-3 Gradient - Perturbation Hybrid: Average Error Per Pixel . . . . . . . . . . . . . . . . . . . . 19

vii
Abstract of Thesis Presented to the Graduate Schoolof the University of Florida in Partial Fulfillment of the
Requirements for the Degree of Master of Science
IMPROVEMENT OF THE CAMERA CALIBRATIONTHROUGH THE USE OF MACHINE
LEARNING TECHNIQUES
By
Scott A. Nichols
August 2001
Chairman: Dr. Michael C. NechybaMajor Department: Electrical and Computer Engineering
In computer vision, we are frequently interested not only in automatically recognizing what
is present in a particular image or video, but also where it is located in the real world. That is, we
want to relate two-dimensional image coordinates and three-dimensional world coordinates. Cam-
era calibration refers to the process through which we can derive this mapping from real-world
coordinates to image pixels. We propose to reduce the amount of effort required to compute accu-
rate camera calibration models by automating much of the calibration process through machine
learning techniques. The techniques developed are intended to simplify the calibration process
such that a minimally trained person can perform single, stereo, or multiple fixed-camera calibra-
tions with precision and ease. In this thesis, we first develop a learning algorithm for improving a
single calibration model through a combination of gradient descent and stochastic model perturba-
tion. We then develop a second algorithm that applies specifically to simultaneous calibration of
multiple fixed cameras. Finally, we illustrate our algorithms through a series of examples and dis-
cuss avenues for further research.

CHAPTER 1
INTRODUCTION
1.1 Computer Vision
For decades, researchers have been attempting to duplicate in machine-centered systems
what we as humans do on a daily basis with our eyes — to recognize and understand the world
around us through visual input. To date, however, our imagination has outpaced the reality of state-
of-the-art computer vision systems. While science fiction has often depicted robots and machines
with human-like capabilities, current computer vision systems do not come close to matching
those imagined capabilities. In fact, we are still many years away from computers that can rival
humans and other animals in image processing and recognition capabilities. Why? Computer
vision, it appears, is a much more difficult problem than was first believed by early researchers. In
the late sixties with the spread of general purpose computers, researchers felt that a solution to the
general vision problem — the near instantaneous recognition of any visual input — was achievable
within a short number of years. Since then, we have come to understand the enormous computa-
tional resources our own brains devote to the vision processing task, and the consequent challenges
that the general computer vision problem poses.
Therefore, rather than develop one computer vision system with very general capabilities,
researchers have begun to focus on implementing practical computer-vision applications that are
limited in scope but can successfully carry out specific tasks. Some examples of recent work
include face and car recognition [14], people detection and tracking [6, 13], computer interaction
through gestures [15], handwriting recognition [9], traffic monitoring and accident reporting [8],
detection of lesions in retinal images [17], and even automated aircraft landing [5]. In many of
1
2
these computer vision projects, researchers are not only interested in recognizing what is present in
an image or video; they would also like to infer 3D geometric information about the world from
the image itself. If a system is to relate with and/or draw conclusions about the 3D position of
objects in the image, it needs to be calibrated; that is, we need to derive a relationship between the
3D geometry of the real world and corresponding image pixels.
1.2 Camera Calibration
Developing accurate calibration or camera models in computer vision has been the focus of
much research over the years. Many researchers have opted for the following simple approach:
first the 3D location of certain known image pixels is identified; then, these pairs of correspon-
dence are exploited to estimate the parameters of the calibration model. From this model, intrinsic
camera parameters, which define the properties of the camera sensor and lens, and the extrinsic
parameters, which define the pose of the camera with respect to the world, can be extracted. This
process can be burdensome, as it requires many precise position measurements. Often, someone
doing computer vision research spends as much time fiddling with and worrying about camera cal-
ibration, as they do on their actual application.
1.3 This Work
In this thesis, we propose to reduce the amount of effort required to compute accurate cam-
era calibration models, by automating much of the calibration process through machine learning
techniques. The techniques developed are intended to simplify the calibration process such that a
minimally trained person can perform single, stereo, or multiple fixed camera calibrations with
precision and ease. In Chapter 2, we review the basics of camera calibration. Then, in Chapter 3 we
develop a training algorithm for improving a single-camera calibration model from constrained
features in the image. Next, in chapter 4, we build on the previous chapter by developing an algo-

3
rithm for improving multiple fixed camera calibration models. Finally, in chapter 5, we present fur-
ther results and discuss possible extensions of this work.

CHAPTER 2
THE CAMERA MODEL
2.1 Introduction
Camera calibration in computer vision refers to the process of determining a camera’s inter-
nal geometric and optical characteristics (intrinsic parameters) and/or the 3D position and orienta-
tion of the camera relative to a specified world coordinate system (extrinsic parameters) [16]. We
do this in order to extract 3D information from image pixel coordinates and to project 3D informa-
tion onto 2D image coordinates. Cameras in computer vision can be mounted as fixed view, a pan-
ning and tilting view, or can be integrated onto a mobile system. Panning, tilting and mobile
cameras do not have a fixed relationship to any world coordinate system (extrinsic parameters).
For such systems, information is often available only in the camera coordinate system, which is
defined by the direction of the camera at the moment the image was captured. External sensors and
encoders can alleviate this problem, but typically only at a significantly higher cost. In fixed cam-
era systems, on the other hand, both the intrinsic and extrinsic parameters combine to provide a
transformation between 3D world and 2D image coordinates.
In recent years, many different techniques have been developed for camera calibration. The
differences in these techniques primarily reflect the wide array of applications that researchers
have pursued. One of the most popular, and the one that forms the basis of this work, is direct lin-
ear transformation (DLT) introduced by Abdel-Aziz and Kahara [1]. The DLT method does not
consider radial lens distortion, but is conceptually and computationally simple. In 1987 Tsai [16]
proposed a method that is likely one of the most referenced works on the topic of camera calibra-
tion. It outlines a two-stage technique using the “radial alignment constraint” to model lens distor-
4
5
tion. Tsai’s method involves a direct solution for most of the camera parameters and some iterative
solutions for the remaining parameters. The cameras used in this work appear to have little or no
lens distortion. Since it has been shown by Weng, Cohen and Herniou [18] that Tsai’s method can
be worse than DLT if lens distortion is relatively small, we chose the DLT method.
2.2 Definition
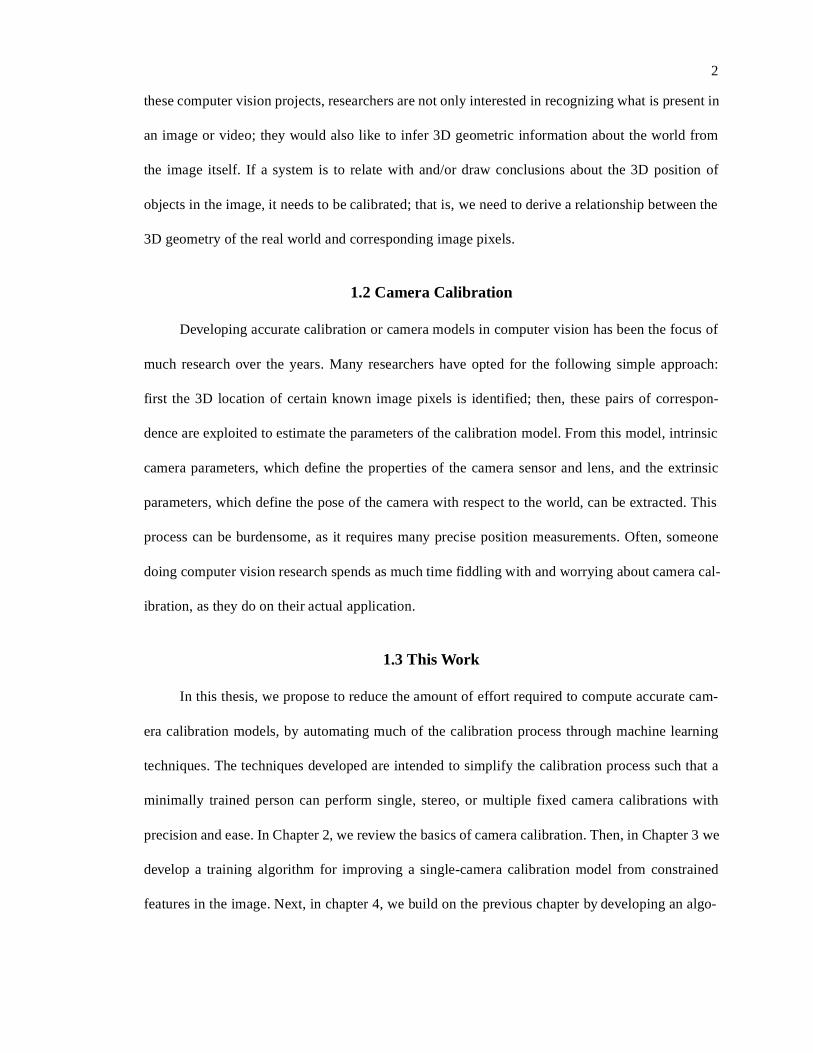
In this thesis, we apply the pinhole lens model of perspective projection, whose basic geom-
etry is shown in Figure 2-1. This model constructs a transformation from 3D world coordinates to
pixels in an image in three steps. First, 3D world coordinates are converted to 3D camera coordi-
nates through a homogeneous transformation. Let us denote as a coordinate in
the world, and as the corresponding 3D camera coordinate. Then, the homoge-
neous transform T is defined by,
Xw
YwZw Ow
Zc
Xc
YcOc
R
t
f
Figure 2-1: The Pinhole Model of Perspective Projection
Pw
Pw xw yw zw, ,( )=
Pc xc yc zc, ,( )=

6
(2-1)
such that,
(2-2)
where R denotes a rotation matrix,
(2-3)
and t denotes a translation vector,
. (2-4)
Second, the 3D camera coordinate is transformed to a 3D sensor coordinate :
(2-5)
where the camera’s intrinsic matrix K is defined as,
(2-6)
In equation (2-6) f is the effective focal length of the camera; a, b, and c describe the scaling
in x and y and the angle between the optical axis and the image sensor plane, respectively; and,
T R t000 1
≡
Pc
1T Pw
1=
3 3×
Rr11 r12 r13
r21 r22 r23
r31 r32 r33
≡
3 1×
ttx
ty
tz
≡
Pc Pu u v w, ,( )=
Pu
1K Pc
1=
K
fa– fb– uo– 0
0 fc– vo– 0
0 0 1 0
0 0 0 1
≡
uo

7
and are the offset from the image origin to the imaging sensor origin. Finally, the 3D sensor
coordinate is converted to the 2D image coordinate :
. (2-7)
The complete projection equation is therefore given by,
(2-8)
The transformation on the world coordinate in equation (2-8) can be combined into a
single matrix S. Since we are only interested in the overall transform between world coordinates
and image coordinates, and not an explicit solution of the extrinsic and/or intrinsic camera param-
eters, we therefore write,
(2-9)
or alternatively,
. (2-10)
2.3 Training the model
From equation (2-10), we now have a linear transformation with 12 unknowns that relate
world coordinates to image pixels. Each correspondence between a 3D world coordinate and a 2D
image point corresponds to a set of two equations,
vo
Pu xi yi,( )
xiuw----=
yivw----=
Pu
1KT Pw
1=
KT
Pu S Pw
1=
Pu
s11 s12 s13 s14
s21 s22 s23 s24
s31 s32 s33 s34
Pw
1=

8
(2-11)
or, in terms of the actual image coordinates,
(2-12)
Given a set of n pairs of world and image coordinates, equation (2-11) can be written in matrix
form as,
(2-13)
Arbitrarily setting leaves 11 unknown parameters which can be solved for using linear
regression. In general, the more correspondence pairs that are defined, the less susceptible the
model is to noise. To a large extent, this thesis aims to reduce or eliminate the need to collect many
such precise correspondence pairs, as that can be labor intensive and/or prone to human operator
error.
u s31x s32y s33z s34+ + +( ) w s11x s12y s13z s14+ + +( )=
v s31x s32y s33z s34+ + +( ) w s21x s22y s23z s24+ + +( )=
xi s31x s32y s33z s34+ + +( ) s11x s12y s13z s14+ + +( )=
yi s31x s32y s33z s34+ + +( ) s21x s22y s23z s24+ + +( )=
x y z 1 0 0 0 0 xix– xiy– xiz– xi–
0 0 0 0 x y z 1 yix– yiy– yiz– yi–
……
s11
s12
…s34
0=
s34 1=

CHAPTER 3 A SINGLE CAMERA
3.1 Introduction
A common method of calibration is to place a special object in the field of view of the cam-
era [10, 11, 16, 21]. Since the 3D shape of the object is known a priori, the 3D coordinates of spec-
ified reference points on the object can be defined in an object-relative coordinate system. One of
the more popular calibration objects described in the literature consists of a flat surface with a reg-
ular pattern marked on it. This pattern is typically chosen such that the image coordinates of the
projected reference points (corners, for example) can be measured with great accuracy. Given a
number of these points, each one yielding an equation of the form (2-9), the perspective transfor-
mation matrix S can be estimated with good results. One drawback of such techniques is that
sometimes a calibration object might not be available. Even when a calibration object is available,
the world coordinate system is defined by the placement of that object with respect to the camera,
and is not necessarily optimized to take advantage of the geometry of the scene.
In another popular method, called structure from motion, the camera is moved relative to the
world, and points of correspondence between consecutive images define the camera model [7, 21,
22]. In this approach, however, only the intrinsic parameters of the camera can be estimated (e.g.
the K matrix); as such, this method is used primarily for stereo vision and will be addressed in the
subsequent chapter.
In our work, we propose to divide the calibration process into two stages. First, we propose
to generate an initial “close” camera model, that then gets optimized to run-time quality through
standard machine learning techniques. Since our system will improve its model over time, all we
9

10
require initially is method for generating reasonably close calibrations without undue effort or
complexity. This type of problem was addressed by Worrall, et al. [19] through a graphical calibra-
tion tool, where the user can rotate and translate a known grid to the desired position on the image.
The system then calculates a perspective projection matrix S that will place the grid at that location
in the image. Our group has implemented a similar, intuitive GUI interface, which allows us to
generate fast and easy initial calibration estimates; this interface is described in further detail in
Appendix B.
3.2 Training Edges
Now, in order to improve the calibration model from the GUI interface through machine
learning, we need something for the machine learning algorithm to train on. Since we do not want
to require human operators to meticulously and precisely select numerous known correspondence
pairs in an image, we should select features in the image that can be easily isolated or extracted
through simple image processing techniques. In man-made environments, constrained edges with
known dimensions are frequent and stand out visually; some examples of these might be the inter-
section of the floor and a wall, the corner of a room, window sills, etc. These features can provide
a wealth of training data, without requiring explicit and precise image-to-world correspondence.
As such, we choose to rely on such constrained data for improving our initial camera calibration
model.
Exploiting the geometry of a given scene, a set of lines is chosen in 3D space, where each of
the lines is constrained along two dimensions; for example the vertical intersection of two perpen-
dicular walls is constrained by and where and are known constants. The
pixels corresponding to each of the lines and the constraints that define each line are the basis for
our model improvement algorithm. In order not to bias the training algorithm, the lines (edges)
x C0= y C1= C0 C1

11
should be chosen so as to provide training data that is balanced throughout the region of interest
both in area and scale as shown, for example, in Figure 3-1.
3.3 Optimization Criterion
Given our constrained-edges training data, we must define a reasonably well-behaved opti-
mization criterion that lets us know how the training algorithm is progressing. Care should be used
when choosing the optimization criterion, as it is the only mechanism a system has to evaluate a
potential model. After some experimentation, our final optimization criterion was designed to
reflect the error between the actual and projected pixel locations of the constrained edges and is
defined by,
(3-1)
where e denotes a training edge, i denotes a pixel along that edge, n denotes the number of pixels
along a particular edge, and m denotes the total number of edges. In equation (3-1), is defined
by,
(a) (b)
Figure 3-1: Example Training Edges
E 1m----
Eei
n-------
i 0=
n
∑e 0=
m
∑=
Eei

12
(3-2)
where is a actual pixel location in the training set and is the projected pixel loca-
tion, which is computed as follows. First, given the two constraints of a single edge (e.g. ,
), a pixel from the corresponding image line and the current perspective projection
model S, apply equation (2-11) to generate two equations and one unknown. For example, for the
constraints specified above, the two equations would become,
(3-3)
Equations (3-3) are easily generalized to arbitrary lines in space, and can be solved for the
unknown coordinate (or parameter, in the general case) through linear regression. Then, we can
project the resulting 3D coordinate onto the image, using equations (2-8) and (2-7), to get
The camera pespective will have some effect on the training data. Given two equal length
edges, the one with a larger image crossection will have more sample points and therefore will
contribute more to the error. To compensate for this, the error generated by each edge is averaged
to an error per pixel along that edge. The average error of each edge is then averaged to obtain the
final error measure E.
3.4 Initial Models
Error in a calibration model can be decomposed into three basic types: rotation, translation,
and scale. Any training algorithm may handle these different sources of error with varying degrees
of success. Therefore, we investigate how well our algorithm (defined below) performs on improv-
ing initial models in four general classes, as defined and illustrated in Figure 3-2. Each of the first
Eei 2 xs xp–( )2ys yp–( )2
+=
xs ys,( ) xp yp,( )
x C0=
y C1= xs ys,( )
s31xs s11–( )C0 s32xs s12–( )C1 s33xs s13–( )z+ + s14 s34xs–=
s31ys s21–( )C0 s32ys s22–( )C1 s33ys s23–( )z+ + s24 s34ys–=
xp yp,( )

13
three initial models in Figure 3-2 is labeled by the dominant type of error displayed. The fourth
model exhibits a combination of errors, but was generated to be fairly close to an acceptable final
model. Given a graphical calibration tool, as described in Appendix B, the close model represents
an easily achievable and therefore most likely starting configuration. The other three cases are pre-
sented to establish the limits of our training approach and to determine the types of error that
present the most difficulty.
3.5 Gradient Descent
The error measure defined in equation (3-2) can be expanded to,
(a) Close
(c) Scale
(b) Rotation
(d) Translation
Figure 3-2: Error Types of Initial Models

14
(3-4)
This is a differentiable function in S for which we can compute the gradient with respect to
the parameters in S such that,
. (3-5)
Note that since is assigned to be equal to one, it is not part of the gradient in equation (3-5).
From equation (3-1), the overall gradient is then given by,
. (3-6)
Given this gradient, the current model S can now be modified by a small positive constant in
the direction of the negative gradient,
. (3-7)
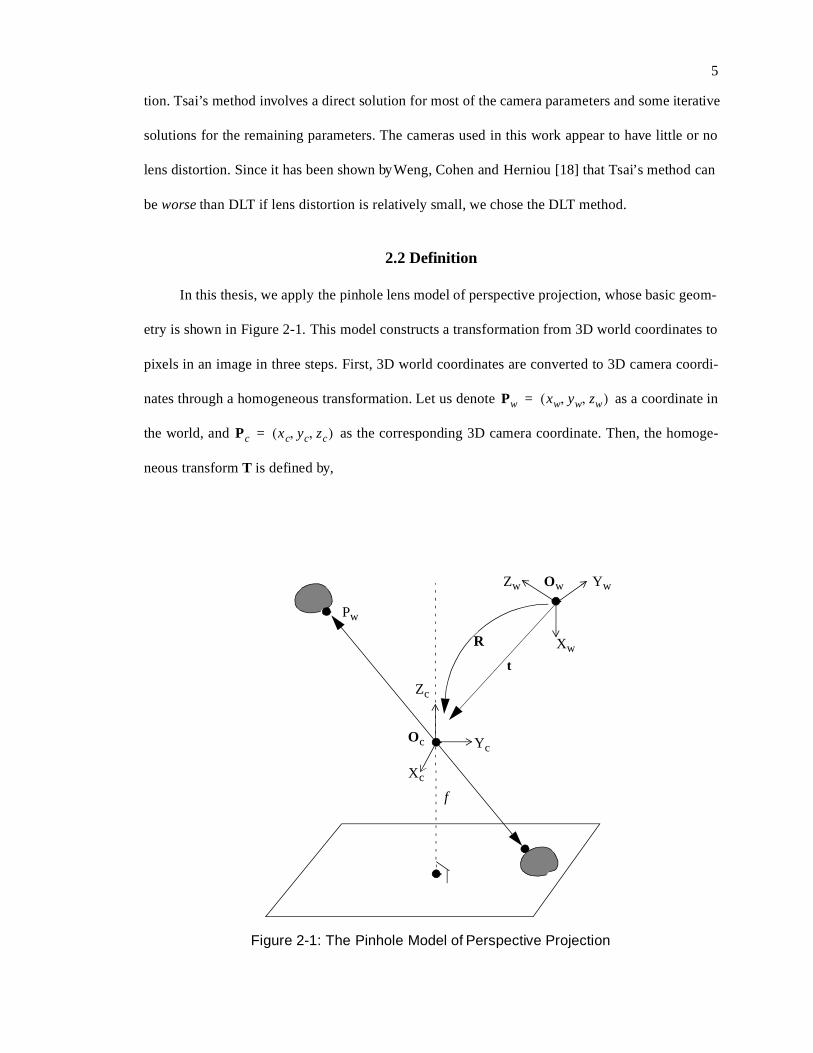
For error surfaces that can be roughly approximated as quadratic, we would expect the
model recursion in equation (3-7) to converge to a good near-optimal solution. Figure 3-3 below
illustrates the performance of pure gradient descent for the four types of initial models. From these
plots, it is apparent that the gradient descent recursion very quickly gets stuck in a local minimum
that is far from optimal; all four types of initial models caused gradient descent to fail within 2.75
seconds.1 In other words, the error surface is decidedly non-quadratic in a global sense, and gradi-
ent-descent represents at best only a partial training algorithm for this problem.
1. All experiments in this thesis were run on a 700 MHz Pentium III running Linux.
Eei 2 xs
s11x s12y s13z s14+ + +
s31x s32y s33z s34+ + +---------------------------------------------------------–
2ys
s21x s22y s23z s24+ + +
s31x s32y s33z s34+ + +-------------------------------------------------------–
2+=
E∇ ei
E∇ eis11∂
∂Eei …s33∂
∂Eei
T
=
s34
E∇
E∇ 1m----
E∇ ei
n------------
i 0=
n
∑e 0=
m
∑=
δg
Snew 1 Eδg∇–( )S=
15
3.6 Model Perturbation
Another method for improving model is stochastic model perturbation. In this approach, the
current model S is first perturbed by a small delta along a random direction ,
. (3-8)
The error for the new model is computed; if it represents an improvement, the current
model becomes the new model; otherwise, the new model is discarded, and we simply try another
random perturbation of the current model.This approach is much less sensitive to the local minima
problem, since the random perturbations can effectively “jump out” of local minima; that is, the
direction is not constrained to be in the negative gradient direction. Figure 3-4 illustrates train-
0 0.5 1 1.5 2 2.5
200
210
220
230
240
0 0.25 0.5 0.75 1 1.25 1.5
235
240
245
250
255
0 0.25 0.5 0.75 1 1.25 1.5
235
240
245
250
255
0 0.1 0.2 0.3 0.4 0.5
46.5
47
47.5
48
Close initial model Rotation Error
Scale Error Translation Error
Figure 3-3: Gradient Descent vs. Different Types of Error
δp
Snew 1 Dδp∇+( )S=
Snew
D∇
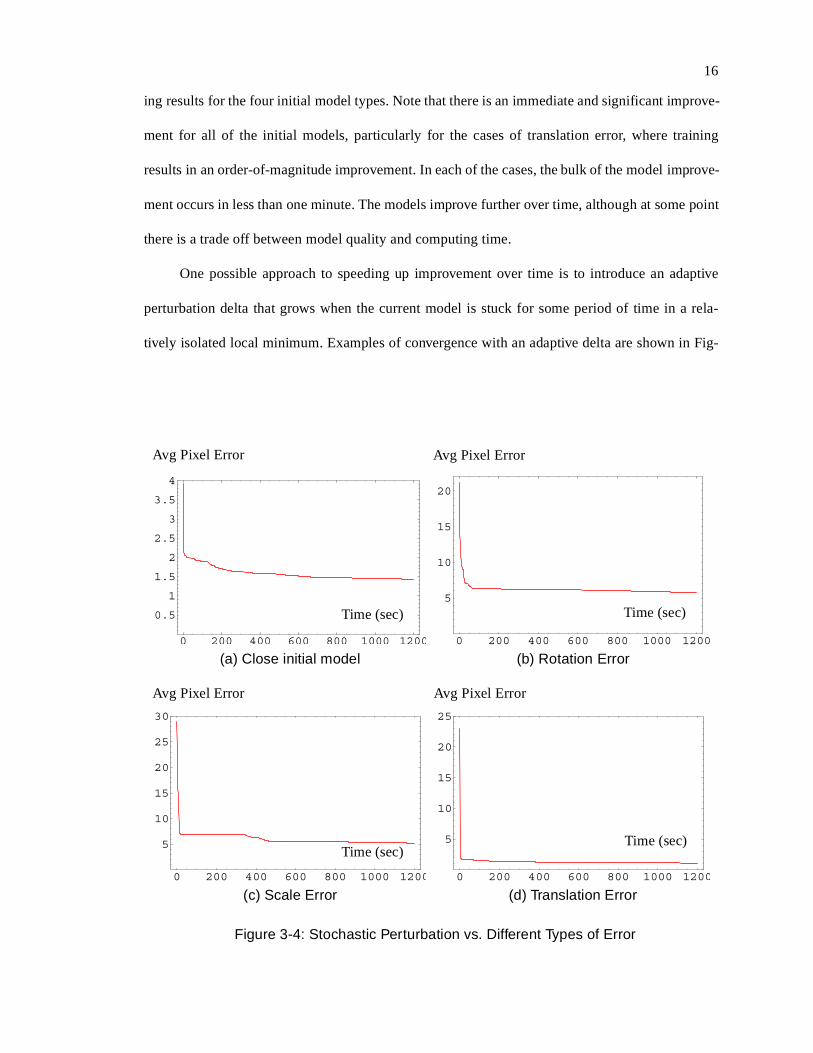
16
ing results for the four initial model types. Note that there is an immediate and significant improve-
ment for all of the initial models, particularly for the cases of translation error, where training
results in an order-of-magnitude improvement. In each of the cases, the bulk of the model improve-
ment occurs in less than one minute. The models improve further over time, although at some point
there is a trade off between model quality and computing time.
One possible approach to speeding up improvement over time is to introduce an adaptive
perturbation delta that grows when the current model is stuck for some period of time in a rela-
tively isolated local minimum. Examples of convergence with an adaptive delta are shown in Fig-
0 200 400 600 800 1000 1200
5
10
15
20
0 200 400 600 800 1000 1200
5
10
15
20
25
30
0 200 400 600 800 1000 1200
5
10
15
20
25
0 200 400 600 800 1000 1200
0.5
1
1.5
2
2.5
3
3.5
4
(a) Close initial model (b) Rotation Error
(c) Scale Error (d) Translation Error
Figure 3-4: Stochastic Perturbation vs. Different Types of Error
Avg Pixel Error Avg Pixel Error
Avg Pixel Error Avg Pixel Error
Time (sec)
Time (sec) Time (sec)
Time (sec)

17
ure 3-5. Not surprisingly, the results are very similar, but the adaptive delta does improve
performance slightly, and, we expect, would increasingly improve performance if used over a
longer period on time.
0 200 400 600 800 1000 1200
5
10
15
20
0 200 400 600 800 1000 1200
5
10
15
20
25
30
0 200 400 600 800 1000 1200
5
10
15
20
25
0 200 400 600 800 1000 1200
0.5
1
1.5
2
2.5
3
3.5
4
(a) Close initial model (b) Rotation Error
(c) Scale Error (d) Translation Error
Figure 3-5: Stochastic Perturbation with Adaptive Delta vs. Different Types of Error
Time (sec)
Avg Pixel Error
Avg Pixel Error
Avg Pixel Error
Avg Pixel Error
Time (sec) Time (sec)
Time (sec)

18
3.7 Gradient-Peturbation Hybrid
Given the relative speed of convergence of gradient descent in localized near quadratic
neighborhoods, and the insensitivity of stochastic perturbation to local minima, a combination of
gradient descent and model perturbation may well train faster than either approach by itself. In this
hybrid approach, gradient descent will quickly reach local minima, at which point, adaptive-delta
model perturbation takes over to search for better regions in model parameter space. In other
words, gradient descent and stochastic perturbation alternate in optimizing the camera model over
time. Sample results for this approach are shown in Figure 3-6.
0 200 400 600 800 1000 1200
5
10
15
20
0 200 400 600 800 1000 1200
5
10
15
20
25
30
0 200 400 600 800 1000
5
10
15
20
25
0 200 400 600 800 1000
1
2
3
4
(a) Close initial model (b) Rotation Error
(c) Scale Error (d) Translation Error
Figure 3-6: Gradient-Perturbation Hybrid vs. Different Types of Error
Avg Pixel Error
Time (sec)
Avg Pixel Error
Time (sec)
Time (sec)
Avg Pixel ErrorAvg Pixel Error
Time (sec)

19
3.8 Performance Comparisons
Which approach is best for our purposes depends on a number of different criteria. Ideally,
we would like a method that responds quickly, improves in the face of difficult models, and is able
to continue to improve if given an open-ended amount of time. As we have already seen, and as we
further detail in Tables 3-1, 3-2 and 3-3, each method improves the camera model the most within
Table 3-1: Model Perturbation: Average Error Per Pixel
Initial 20 Sec. 1 Min. 5 Min. 10 Min. 20 Min.
Close 3.9336 2.0053 1.9618 1.6327 1.5182 1.4246
Rotation 21.2163 8.8545 6.5318 6.2082 6.1391 5.8464
Scale 28.9091 6.9955 6.9518 6.8318 5.4664 5.2064
Translation 23.0482 1.7082 1.6143 1.3182 1.1909 1.1618
Table 3-2: Model Perturbation With Adaptive Delta: Average Error Per Pixel
Initial 20 Sec. 1 Min. 5 Min. 10 Min. 20 Min.
Close 3.9336 2.0053 1.9691 1.64 1.5972 1.4127
Rotation 21.2163 9.138 6.8472 6.22 5.9091 5.2491
Scale 28.9091 7.0035 6.9515 5.8091 5.2945 4.5236
Translation 23.0482 1.7082 1.6145 1.3255 1.2227 1.19
Table 3-3: Gradient - Perturbation Hybrid: Average Error Per Pixel
Initial 20 Sec. 1 Min. 5 Min. 10 Min. 20 Min.
Close 3.9336 2.0364 1.9173 1.5664 1.4736 1.3355
Rotation 21.2164 12.4909 8.0218 5.3855 5.1991 5.0564
Scale 28.9091 14.13 6.7918 5.7545 5.5655 4.6891
Translation 23.0482 1.6909 1.5627 1.4 1.3118 1.1964

20
the first minute of training. For each approach the error then continues to decline, but the two tech-
niques that make use of an adaptive delta show a continuing ability to improve over time with the
hybrid approach outperforming the others. A direct comparison is shown in Figures 3-7 and 3-8,
0 200 400 600 800 1000
-0.04
-0.02
0
0.02
0 200 400 600 800 1000
-0.2
-0.1
0
0.1
0 200 400 600 800 1000-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0 200 400 600 800 1000-0.5
-0.25
0
0.25
0.5
0.75
1
0 200 400 600 800 1000
-1
-0.5
0
0.5
1
0 200 400 600 800 1000
-1.5
-1
-0.5
0
0.5
Translation Scale
Perturbation - Perturbation with delta Perturbation - Perturbation with delta
Perturbation - Hybrid Perturbation - Hybrid
Perturbation with Delta - HybridPerturbation with Delta - Hybrid
Figure 3-7: Performance Comparison for the Translational and Scale Initial Models
Time (sec)
Pixels
Pixels
Pixels Pixels
Time (sec)Time (sec)
Pixels
Time (sec)Time (sec)
Pixels
Time (sec)

21
which plot the difference in error between the different techniques over time. The final camera
models trained by the hybrid method are depicted in Figure 3-9.
0 200 400 600 800 1000
-0.08
-0.06
-0.04
-0.02
0
0.02
0 200 400 600 800 1000
-0.02
0
0.02
0.04
0.06
0.08
0 200 400 600 800 1000
-0.025
0
0.025
0.05
0.075
0.1
0.125
0 200 400 600 800 1000-0.6
-0.4
-0.2
0
0.2
0.4
0 200 400 600 800 1000
0
0.2
0.4
0.6
0.8
0 200 400 600 800 1000
-0.5
-0.25
0
0.25
0.5
0.75
Close Rotation
Perturbation - Perturbation with delta Perturbation - Perturbation with delta
Perturbation - Hybrid Perturbation - Hybrid
Perturbation with Delta - HybridPerturbation with Delta - Hybrid
Figure 3-8: Performance Comparison for the Close and Rotational Initial Models
Pixels
Time (sec)
Pixels
Time (sec)Time (sec)
Pixels
PixelsPixels
Time (sec)
Time (sec)Time (sec)
Pixels

22
Why does training virtually eliminate translation error while rotation and scale errors prove
more difficult to correct? The answer lies in the camera model itself [see equation (2-8)]. Transla-
tion is parameterized by 3 of the 12 parameters in S, while rotation is parameterized by 9 parame-
ters, which are additionally constrained by the orthonormality requirement for rotation matrices.
Finally, scale affects all 12 parameters in S. Thus, to correct rotational errors, 9 model parameters
must be changed simultaneously, while for scale errors, all 12 parameters must be changed. This
adds complexity and size to the search space, resulting in a slower improvement and a greater like-
lihood of getting stuck in a remote local minimum.
(a) Close
(c) Scale
(b) Rotation
(d) Translation
Figure 3-9: Final Models Using the Gradient - Perturbation Hybrid Technique

CHAPTER 4STEREO CAMERAS
4.1 Introduction
We are interested in abstracting 3D information about the world through computer vision
techniques. Therefore, we will, in general, require more than one non-coincident camera view for
an area of interest, since pixels from a single-camera image do not correspond to exact 3D world
coordinates, but rather to rays in space. If we can establish a feature correspondence between at
least two camera views calibrated to the same world coordinate system, then we can extract the
underlying 3D information for that feature by intersecting the rays corresponding to its pixel loca-
tion in each image. Hence, in this chapter, we consider the problem of simultaneous calibration of
multiple (stereo) fixed cameras to a unique world coordinate system. More specifically, we build
on the results of the previous chapter by assuming that one camera in a multi-camera setup has
already been trained towards a good model. The task that remains is to calibrate the additional
camera(s). In the remainder of this chapter, we focus on the two-camera case, although our results
generalize in a straightforward manner to more than two cameras.
Given a set of two cameras where one has already been trained, and the second has a rough
initial calibration, we propose to improve the second calibration through an iterative process that
involves using a “virtual calibration object.” This calibration object is created by moving a physical
object throughout the area of interest and tracking it from each camera view. The path that the
object follows in the image (in pixels) and the corresponding 3D estimates constitute the training
data at each step of the algorithm.
23

24
4.2 Related Work
Previous work in stereo camera calibration is relatively extensive, but varies based on the
particular application of interest. Many of the previous methods use a known calibration pattern
whose features are extracted from each image. Rander and Kanade [12] have a system of approxi-
mately 50 cameras arranged in a dome to observe a room-sized space. In order to calibrate these
cameras, a large calibration object is built and then moved to several precise locations, in effect
building a virtual calibration object that covers most of the room. Do [4] applied a neural network
to acquire stereo calibration models and determined the approach to be adequate; however, he went
on to show that high accuracy did not appear possible in a reasonable amount of training time.
Horaud et al. [7] use rigid and constrained motions of a stereo rig to allow camera calibration. This
approach, like most in the field, address small baseline-stereo rigs which usually have a fixed, rigid
geometry. Azarbayejani and Pentland [2] propose an approach that tracks an item of interest
through images to obtain useable training data. This approach is similar to ours except that they
use object tracking to completely establish a calibration rather than using it to modify an already
existing calibration. The drawback of this technique is that scale is not recoverable, so absolute
distance has no meaning. Chen et al. [3] offer a similar technique that uses structure-from-motion
to obtain initial camera calibration models, and then tracks a virtual calibration object to iterate to
better models. The initial calibrations are obtained sequentially, where each new calibration model
depends on those previously derived. As such, error accumulates for each sucessive calibration,
placing newer calibrations further away from an optimal solution. Our work has shown (e.g. Fig-
ures 3-4, 3-5 and 3-6) that this can have a significant impact on both the final calibration obtained
and the amount of time required to obtain it.

25
4.3 Our Approach
In this research, our primary motivation is to make the calibration process as quick and easy
as possible without sacrificing precision. We wish for a non-expert to be able to completely cali-
brate a system for operation by making part of the calibration process visual and automating the
rest. Each camera obtains its initial calibration via a graphical calibration tool (as described in
Appendix B). The calibration is then improved by having the cameras track an object of interest
throughout the viewing area. Ideally, image capture and processing should be synchronized
between cameras; however, in practice, such synchronization is difficult and expensive to achieve
in hardware. Even for an asynchronous system, however, we can approximate synchronous opera-
tion through Kalman filtering and interpolation of time-stamped images, as long as the system
clocks are synchronized between the image processing computers. This Kalman-filtered and inter-
polated trajectory then becomes the training data for improving our stereo camera models.
4.4 Training Data
In order to collect training data, we apply a modified version of Zapata’s color-model-based
tracking algorithm [20] to track an object of interest from multiple camera views in real-time. The
time-stamped pixel data of the object’s centroid are passed through a first-order Kalman filter and
then sent to a multi-camera data fusor. The data fusor accepts the time-stamped data streams, inter-
polating and synchronizing the multiple data streams at 30Hz. Prior to training, the synchronized
tracking data is balanced so that no one single region of the image is dominated by a disproportion-
ately large amount of data. Although training examples reported in this thesis are over fixed data
sets, there is no algorithmic obstacle to training off streaming data in real-time.
4.5 Model Improvement
The training data now consists of synchronized sets of pixel values from the multiple
cameras. Let us consider the set of pixel values for the object at time :
n m
t

26
(4-1)
where denotes the pixel location of the object for camera . Given our current estimate of
each camera model , we can estimate the 3D world coordinate of the object at time by regress-
ing the equations,
(4-2)
, for , which denotes the estimated 3D world coordinate at time .
For each training camera, we now have estimated correspondence pairs between the syn-
chronized pixel values for that camera and their corresponding estimated 3D world coordinates.
Given this data, we can now apply equation (2-13) to generate a new perspective projection matrix
based on the estimated 3D tracking data. This process is repeated until the calibration
reaches acceptable precision. Figure 4-1 shows the error over time for the above approach. There is
initial improvement followed by rapid and consistent model degradation. This is not what was
expected, but can be explained after looking a little closer at the procedure and how it operates.
The resulting calibration in Figure 4-1 gives an indication of the source of the problem. Recall
from equation (2-8) that part of the projection matrix is the camera matrix K which contains intri-
nisic parameters for the camera such as scale, skew and offset. These parameters are fixed in real-
ity but are obviously being changed by this training process. This is happening due to the
unconstrained nature of the training process: known incorrect (x, y, z) are being used to train a
model which is simply a linear least squares solution and K, as a component of this model, is also
being changed. We are seeking to use a good model to train a bad model by modifing its rotation
and translation, not its intrinsic camera parameters. A property of the linear least squares estimate
x1 y1,( ) x2 y2,( ) … xm ym,( ), , ,{ }t
xj yj,( ) j
Sj t
s31 j, xj s11 j,–( )xt s32 j, xj s12 j,–( )yt s33 j, xj s13 j,–( )zt+ + s14 j, s34 j, xj–=
s31 j, yj s21 j,–( )xt s32 j, yj s22 j,–( )yt s33 j, yj s23 j,–( )zt+ + s24 j, s34 j, yj–=
j 1 2 … m, , ,{ }∈ xt yt zt, ,( ) t
n
Sj new,

27
is that it distributes the error as evenly as possible between the two models. The even distribution
of the error is not appropriate for us since we know that the source of the error is the bad model.
Weighing the parameters of the regression towards the training model as an indication that it is the
source of the error might help. Figure 4-2 shows the error vs. time as a function of different
weights applied to the training model. It shows that we can mitigate the effect on the K matrix of
the training model with a weighted regression. A gain of ten shows better performance but is still
unstable. A gain of 100 or 1000 shows much better stability and performance. Looking at the error
over time for the different gains it appears that a higher gain exibits a similar response when
viewed on a larger scale.
0 25 50 75 100 125 150 1750
200
400
600
800
(b) Initial Calibration(a) Error Over Time
(d) Final Calibration(c) Best Calibration
Figure 4-1: Results for a Non-Weighted Model Improvement
Error (mm)
Time (sec)

28
0 25 50 75 100 125 150 175
10
20
30
40
50
60
70
80
0 25 50 75 100 125 150 175
10
20
30
40
50
60
70
80
0 25 50 75 100 125 150 175
10
20
30
40
50
60
70
80
0 200 400 600 800 1000 1200 1400
20
40
60
80
100
(a) Gain of 10 on Training Modell (b) Gain of 100 on Training Model
(c) Gain of 1000 on Training Model (d) Gain of 10000 on Training Model
Figure 4-2: Error Over Time for Various Gains on the Training Model
Time (sec)
Time (sec) Time (sec)
Time (sec)
Error (mm)
Error (mm) Error (mm)
Error (mm)

29
0 25 50 75 100 125 150 1750
200
400
600
800
0 25 50 75 100 125 150 175
10
20
30
40
50
60
70
80
0 250 500 750 1000 1250 1500
20
40
60
80
100
0 100 200 300
20
40
60
80
100
(a) Gain of 1 (b) Gain of 10
(c) Gain of 100 (d) Gain of 1000
Figure 4-3: The Long Term Performance using Various Gains
Error (mm)
Time (sec)
Time (sec)
Error (mm)
Time (sec)
Error (mm)Error (mm)
Time (sec)

CHAPTER 5 FURTHER RESULTS AND DISCUSSION
5.1 Single Camera
Here, we present some further results for the algorithms developed in the previous two chap-
ters. Below, we solve eight sample calibration problems, where the initial calibrations are obtained
using our previously referenced graphical calibration tool These are shown in Figures 5-1, 5-2, 5-3
and 5-4. Given these descent initial calibrations, our algorithms develop run-time quality models
within two minutes from the start of training. Figures 5-5 and 5-6 show the systems perfor-
mance in the face of poor initial calibrations. These figures show that even a poor initial
calibration can be improved significantly, but not always to run-time quality. Overall, these
results show that our single-camera calibration approach meets our goal — namely, mak-
ing camera calibration a simpler, faster and easier process.
5.2 Stereo Cameras
Figure 5-7 and Figure 5-8 show four example calibrations obtained from two different cam-
era angles. The initial calibrations are obtained using our graphical calibration tool. These calibra-
tions and the associated graphs reveal the capabilities and shortcomings of our proposed stereo
technique. While in its present form, it may not yet be sufficiently robust for real world applica-
tion, it can certainly be made to be so with minor changes. As we discussed in Chapter 4, if we
constrained modifications of the camera model to extrinsic parameters only, keeping the intrinsic
parameters of the model fixed, we expect that the observed model drift would no longer occur.
30

31
0 20 40 60 80 100
1
2
3
4
5
6
0 500 1000 1500 2000
1
2
3
4
5
6
7
(a) Example 1 Initial
(c) Example 2 Initial
(b) Example 1 Final
(d) Example 2 Final
Figure 5-1: Example Single Camera Calibrations (1 & 2)
(f) Example 2 Error vs. Time(e) Example 1 Error vs. Time

32
0 500 1000 1500 2000
0.5
1
1.5
2
2.5
3
3.5
4
0 500 1000 1500 2000
1
2
3
4
5
(a) Example 3 Initial
(c) Example 4 Initial
(b) Example 3 Final
(d) Example 4 Final
Figure 5-2: Example Single Camera Calibrations (3 & 4)
(f) Example 4 Error vs. Time(e) Example 3 Error vs. Time

33
0 500 1000 1500 2000
2.5
5
7.5
10
12.5
15
17.5
0 200 400 600 800 1000 1200 1400
1
2
3
4
5
6
7
(a) Example 5 Initial
(c) Example 6 Initial
(b) Example 5 Final
(d) Example 6 Final
Figure 5-3: Example Single Camera Calibrations (5 & 6)
(f) Example 6 Error vs. Time(e) Example 5 Error vs. Time

34
0 200 400 600 800
1
2
3
4
5
6
7
0 100 200 300 400 500
2
4
6
8
(a) Example 7 Initial
(c) Example 8 Initial
(b) Example 7 Final
(d) Example 8 Final
Figure 5-4: Example Single Camera Calibrations (7 & 8)
(f) Example 8 Error vs. Time(e) Example 7 Error vs. Time

35
0 50 100 150 200 250 300 350
2
4
6
8
10
12
14
16
0 100 200 300 400 500 600
5
10
15
20
(a) Poor Calibration 1 Initial
(c) Poor Calibration 2 Initial
(b) Poor Calibration 1 Final
(d) Poor Calibration 2 Final
Figure 5-5: Poor Initial Calibrations (1 & 2)
(f) Poor Calibration 2 Error vs. Time(e) Poor Calibration 1 Error vs. Time

36
0 100 200 300 400 500 600
2
4
6
8
10
12
14
16
0 100 200 300 400 500
5
10
15
20
25
(a) Poor Calibration 3 Initial
(c) Poor Calibration 4 Initial
(b) Poor Calibration 3 Final
(d) Poor Calibration 4 Final
Figure 5-6: Poor Initial Calibrations (3 & 4)
(f) Poor Calibration 4 Error vs. Time(e) Poor Calibration 3 Error vs. Time

37
0 20 40 60 80 100 120 140
30
40
50
60
70
80
0 50 100 150 200 250
50
60
70
80
90
(a) Initial Stereo Calibration 1
(c) Initial Stereo Calibration 2
(b) Final Stereo Calibration 1
(d) Final Stereo Calibration 2
Figure 5-7: Stereo Calibration Examples (1 & 2)
(f) Calibration 2 Error vs. Time(e) Calibration 1 Error vs. Time

38
0 50 100 150 200
42.5
45
47.5
50
52.5
55
57.5
60
0 25 50 75 100 125 150 175
30
40
50
60
70
80
90
100
(a) Initial Stereo Calibration 3
(c) Initial Stereo Calibration 4
(b) Final Stereo Calibration 3
(d) Final Stereo Calibration 4
Figure 5-8: Stereo Calibration Examples (3 & 4)
(f) Calibration 4 Error vs. Time(e) Calibration 3 Error vs. Time

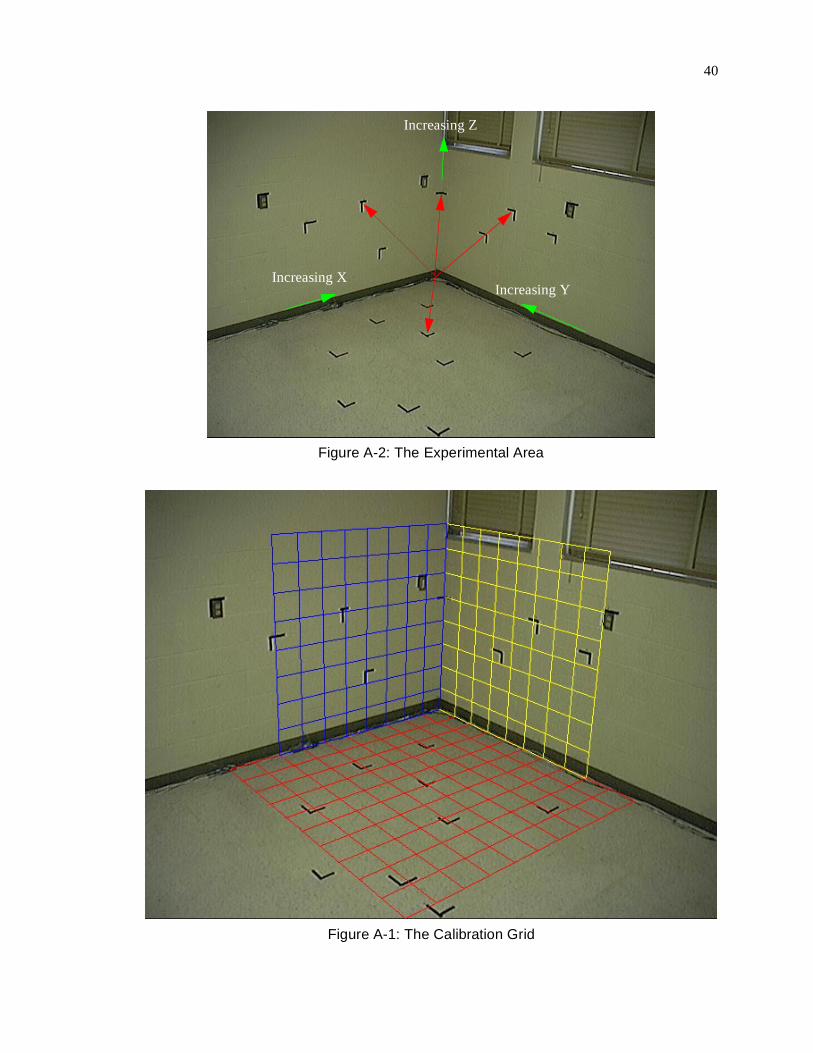
APPENDIX AVISUAL CALIBRATION EVALUATION
When applying machine learning to improve camera models, an well-behaved error measure
is critical. With exact correspondence data (2D image coordinates paired with 3D world coordi-
nates), such an error measure is easily specified. It is precisely this type of data that we want to
avoid having to collect, however. Yet, without such data, it is difficult, if not impossible, to define a
globally well-behaved error measure. As such, we choose the human eye as an appropriate means
of evaluating different calibration models. To make this intuitive, we draw a grid defined in space
onto the image using the current camera model, and decide visually if the system’s error measure
is accurately measuring the quality of a model. This grid is chosen to match some feature(s) in the
scene to allow a person to visually determine the quality of a calibration. Figure A-2 shows the
experimental area. In Figure A-2, the red arrows indicate the corner points of a one meter cube
placed in the far corner of the room, while the green arrows show the world coordinate system,
defined after considering the experimental area and how to keep initial data collection as simple as
possible. Figure A-1 shows a sample grid drawn on an image. The grid uses squares and
should ideally be aligned with the floor and walls. Points marked with a red arrow in Figure A-2
should have the outside corner of the fifth box out or up laying on it. The windowsill is a straight
edge that a human can use as a guide for the top edge of the grid.
20cm2
39
40
Figure A-1: The Calibration Grid
Increasing XIncreasing Y
Increasing Z
Figure A-2: The Experimental Area

APPENDIX BGRAPHICAL CALIBRATION TOOL
In order to generate initial rough calibration models quickly and easily, we developed an
intuitive graphical interface through which a user can manipulate and align a grid model of a scene
for different rotations and translations of the camera with respect to the world. This interface, as
shown in Figure B-1, was written in C for the X/Motif window system.
Given approximate intrinsic parameters for a camera, we can project a three-dimensional
model of the world onto an image for any given rotation, translation and scale (effective focal
length). Therefore, as the user adjusts parameters that control scale, rotation and translation, the
grid model of the world is continuously redrawn to reflect the new effective pose of the camera.
Once the user is happy with the alignment of the grid model to the world, he/she can then save the
effective perspective projection matrix and use that as the initial camera calibration model.
41

42
Figure B-1: The Graphical Calibration Tool

REFERENCES
[1] Y. I. Abdel-Aziz and H. M. Kahara, “Direct Linear Transformation From Comparator Coor-dinates into Object-Space Coordinates,” Proc. American Society of Photogrammetry Sympo-sium on Close Range Photogrammetry, pp. 1-18, 1971.
[2] A. Azarbayejani and A. Pentland, “Camera Self Calibration From One Point Correspon-dence,” Perceptual Computing Technical Report #341, Massachusetts Institute of Technol-ogy Media Library, 1995.
[3] X. Chen, J. Davis and P. Slusallek, “Wide Area Calibration Using Virtual CalibrationObjects,” Proc. IEEE Conf. on Computer Vision and Pattern Recognition, vol. 2, pp. 520-7,2000.
[4] Y. Do, “Application of Neural Networks for Stereo-Camera Calibration,” Proc. Int. JointConf. on Neural Networks, vol. 4, pp 2719-22, 1999.
[5] R. Frezza and C. Altafini, “Autonomous Landing by Computer Vision: An Application ofPath following in SE(3),” Proc. IEEE Conf. on Decision and Control, vol. 3, pp. 2527-32,2000.
[6] I. Haritaoglu, D. Harwood and L. Davis, “ : Who? When? Where? What? A Real TimeSystem for Detecting and Tracking People,” Proc. IEEE Int. Conf. on Face and Gesture Rec-ognition, pp. 222-7, 1998.
[7] R. Horaud, G. Csurka and D. Demirdijian, “Stereo Calibration from Rigid Motions,” IEEETrans. on Pattern and Machine Intelligence, vol. 22, no. 12, pp. 1446-52, 2000.
[8] S. Kamijo, Y. Matsushita, K. Ikeuchi and M. Sakauchi, “Traffic Monitoring and AccidentDetection at Intersections,” IEEE Trans. on Intelligent Transportation Systems, vol. 1, no. 2,pp. 108-18, 2000.
[9] F. Karbou and F. Karbou, “An Interval Approach to Handwriting Recognition,” Proc. Conf.of the North American Fuzzy Information Processing Society, pp. 153-7, 2000.
[10] J.M. Lee, B.H. Kim, M.H. Lee, K. Son, M.C. Lee, J.W. Choi and S.H. Han, “Fine Active Cal-ibration of Camera Position/Orientation Through Pattern Recognition,” IEEE Int. Symposiumon Industrial Electronics, vol. 2, pp. 657-62, 1998.
[11] P. Mendonca and R. Cipolla, “A Simple Technique for Self-Calibration,” Proc. IEEE Conf. onComputer Vision and Pattern Recognition, vol. 1, pp. 500-5, 1999.
W4
43

44
[12] P. Rander, “A Multi-Camera Method for 3D Digitization of Dynamic, Real-World Events,”CMU-RI-TR-98-12, Technical Report, The Robotics Institute, Carnegie Mellon University,1998.
[13] G. Rigoll, S. Eickeler and S. Muller, “Person Tracking in Real-World Scenarios Using Statis-tical Methods,” Proc. IEEE Int. Conf. on Automatic Face and Gesture Recognition, pp.342-7,2000.
[14] H. Schneiderman, “A Statistical Approach to 3D Object Detection Applied to Faces andCars,” CMU-RI-TR-00-06, Ph.D. Thesis, The Robotics Institute, Carnegie Mellon Univer-sity, 2000.
[15] R. Sharma, M. Zeller, V.I. Pavlovic, T.S. Huang, Z. Lo, S. Chu, Y. Zhao, J.C. Phillips and K.Schulten. “Speech/Gesture Interface to a Visual-Computing Environment,” IEEE ComputerGraphics and Applications, vol. 20, no. 2, pp. 29-37, 2000.
[16] R. Tsai, “A Versatile Camera Calibration Technique for High-Accuracy 3D Machine VisionMetrology Using Off-the-Shelf TV Cameras and Lenses,” IEEE Journal of Robotics andAutomation, vol. RA-3, no. 4, pp 323-44, 1987.
[17] H. Wang, W. Hsu, K. Guan and M. Lee, “An Effective Approach to Detect Lesions in ColorRetinal Images,” Proc. IEEE Conf. on Computer Vision an Pattern Recognition, vol. 2, pp.181-6, 2000.
[18] J. Weng, P. Cohen and M. Herniou, “Camera Calibration with Distortion Models and Accu-racy Evaluation,” IEEE Trans. of Pattern Analysis and Machine Intelligence, vol. 14, no. 10,pp. 965-80, 1992.
[19] A.D.Worrall, G.D.Sullivan and K.D.Baker, “A Simple Intuitive Camera Calibration Tool ForNatural Images,” Proc. of the 5th British Machine Vision Conf., vol. 2, pp. 781-90, 1994.
[20] I. Zapata, “Detecting Humans in Video Sequences Using Color and Shape Information,” M.S.Thesis, Dept. of Electrical and Computer Engineering, University of Florida, 2001.
[21] Z. Zhang, “A Flexible Technique for Camera Calibration,” IEEE Trans. on Pattern Analysisand Machine Intelligence, vol.22, no.11, pp. 1330-4, 2000.
[22] Z. Zhang, “Motion and Structure of Four Points from One Motion of a Stereo Rig withUnknown Extrinsic Parameters,” IEEE Trans. on Pattern Analysis and Machine Intelligence,vol. 17, no. 12, pp. 1222-5, 1995.

45
BIOGRAPHICAL SKETCH
Scott Nichols was born in Miami, Florida, in 1969. A high school dropout, Scott decided to
pursue an education and started community college full-time in 1994. He transferred as a junior to
the University of Florida in 1996 and recieved both a Bachelor of Science degree in electrical engi-
neering and a Bachelor of Science degree in computer engineering in Aug 1999. He has since
worked as a research assistant at the Machine Intelligence Laboratory, working toward a Master of
Science degree in electrical engineering.