Improved Global Routing Using ≉-Geometry
42
Western Michigan University Western Michigan University ScholarWorks at WMU ScholarWorks at WMU Master's Theses Graduate College 12-1992 Improved Global Routing Using ⋋-Geometry Improved Global Routing Using -Geometry Surendra Burman Follow this and additional works at: https://scholarworks.wmich.edu/masters_theses Part of the Computer Sciences Commons Recommended Citation Recommended Citation Burman, Surendra, "Improved Global Routing Using ⋋-Geometry" (1992). Master's Theses. 896. https://scholarworks.wmich.edu/masters_theses/896 This Masters Thesis-Open Access is brought to you for free and open access by the Graduate College at ScholarWorks at WMU. It has been accepted for inclusion in Master's Theses by an authorized administrator of ScholarWorks at WMU. For more information, please contact [email protected].
Transcript of Improved Global Routing Using ≉-Geometry

Western Michigan University Western Michigan University
ScholarWorks at WMU ScholarWorks at WMU
Master's Theses Graduate College
12-1992
Improved Global Routing Using ⋋-Geometry Improved Global Routing Using -Geometry
Surendra Burman
Follow this and additional works at: https://scholarworks.wmich.edu/masters_theses
Part of the Computer Sciences Commons
Recommended Citation Recommended Citation Burman, Surendra, "Improved Global Routing Using ⋋-Geometry" (1992). Master's Theses. 896. https://scholarworks.wmich.edu/masters_theses/896
This Masters Thesis-Open Access is brought to you for free and open access by the Graduate College at ScholarWorks at WMU. It has been accepted for inclusion in Master's Theses by an authorized administrator of ScholarWorks at WMU. For more information, please contact [email protected].

IMPROVED GLOBAL ROUTING USING A-GEOMETRY
by
Surendra Burman
A Thesis Subm itted to the
Faculty of The G raduate College in partial fulfillment of the
requirem ents for the Degree of M aster of Science
D epartm ent of Com puter Science
W estern Michigan University K alam azoo, M ichigan
December 1992
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

IMPROVED GLOBAL ROUTING USING A-GEOMETRY
Surendra Burm an, M.S.
W estern Michigan University, 1992
In th is thesis, we study global routing problem in VLSI Design using A-
geometry. We study the problem of global routing of m ultiterm inal nets in a
generalized geom etry called A-geometry in order to improve layout and conse
quently enhance the perform ance. In A-geometry, edges w ith angles Z7r/A, for all
i , are allowed, where A (> 2 ) is a positive integer. A = 2, 4 and oo correspond to
rectilinear, 45° and Euclidean geometries respectively.
In th is thesis, we prove th a t all minimum spanning trees in A-geometry
satisfy the separability property, for A = 4. Furtherm ore, we extend our result
and prove th a t all m inim um spanning trees are separable for all A-geometries,
A > 4. We develop a polynom ial tim e algorithm to find an optim al steiner tree
in A-geometry which is derivable from the minimum spanning tree. Our exper
im ents indicate th a t tree length can be reduced by 10-12% by using 4-geometry
as com pared to rectilinear geometry; however, length reduction is quite m arginal
for higher geometries. As a consequence, we conclude th a t for purpose of global
rou ting it is sufficient to consider layouts in 4-geometry.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

ACKNOWLEDGMENTS
I t is very difficult to acknowledge the contributions from m any people who
helped in the fulfillment of a dream . T he following are ju s t a few who contributed
in th e com pletion of th is thesis.
Firstly, I thank my advisor, Dr. Naveed A. Sherwani whose role for me
has been much much m ore th an ju st an advisor. I could not have m ade so much
progress w ithout his guidance, help and continued encouragem ent. He has been an
everlasting source of m otivation for me. I sincerely acknowledge his contribution
in my progress. Secondly, I would like to thank the m em bers of my com m ittee, Dr.
Fred Boals and Dr. Ajay G upta; I extend my sincere thanks for their supervision
and support. I would like to thank all the faculty in the D epartm ent of Com puter
Science who have ever provided opportunity , encouragem ent, and support to me.
I also want to m ention my colleagues in the night group, Arun, Sid, Wo Bu,
C hander, Jahangir, M oazzem, Sivakumar, Roshan, W asim, and others. I enjoyed
working w ith them and th an k them for their encouragem ent and support.
Finally, to my fam ily m em bers, who supported me and I owe a debt of
g ratitude . I th an k them for their love and continued help to do my research.
Surendra Burm an
ii
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

INFORMATION TO USERS
This manuscript has been reproduced from the microfilm master. UMI films the text directly from the original or copy submitted. Thus, some thesis and dissertation copies are in typewriter face, while others may be from any type of computer printer.
The quality of this reproduction is dependent upon the quality of the copy submitted. Broken or indistinct print, colored or poor quality illustrations and photographs, print bleedthrough, substandard margins, and improper alignment can adversely affect reproduction.
In the unlikely event that the author did not send UMI a complete manuscript and there are missing pages, these will be noted. Also, if unauthorized copyright material had to be removed, a note will indicate the deletion.
Oversize materials (e.g., maps, drawings, charts) are reproduced by sectioning the original, beginning at the upper left-hand corner and continuing from left to right in equal sections with small overlaps. Each original is also photographed in one exposure and is included in reduced form at the back of the book.
Photographs included in the original manuscript have been reproduced xerographically in this copy. Higher quality 6" x 9" black and white photographic prints are available for any photographs or illustrations appearing in this copy for an additional charge. Contact UMI directly to order.
University Microfilms International A Bell & Howell Information Company
300 North Zeeb Road. Ann Arbor. Ml 48106-1346 USA 313/761-4700 800/521-0600
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

Order Number 1351257
Improved global routing using A-geometry
B urm an , S urendra K um ar, M.S.
Western Michigan University, 1992
U M I300 N. Zeeb Rd.Ann Arbor, MI 48106
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

To night group.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

TABLE OF CONTENTS
A C K N O W L E D G M E N T S ........................................................................................... ii
LIST O F T A B L E S ......................................................................................................... iv
LIST O F F I G U R E S ...................................................................................................... v
I. VLSI D ESIG N AU TOM A TION .................................................................... 1
1.1 R outing Problem s in V L S I ...................................................................... 2
1.2 Thesis O r g a n iz a t io n ................................................................................ 4
II. GLOBAL R O U T I N G ........................................................................................... 5
2.1 Global Routing M odels ......................................................................... 6
2.2 Global R outing A lg o r i th m s ........................ 7
2.3 Steiner Tree Approach to Global R o u t i n g ....................................... 9
III. IM PR O V ED GLOBAL RO UTING USING A -G E O M E T R Y .................. 12
3.1 Basic Concepts of A-Geometry ........................................................... 13
3.2 A-Separability of M inimum Spanning T r e e s ................................... 17
IV. A LG O R ITH M FO R O PTIM A L STEIN ER T R E E IN A-GEOM ETRY 21
V. CONCLUSIONS AND FU T U R E R E S E A R C H .......................................... 26
5.1 C o n c lu s io n s .................................................................................................. 26
5.2 Fu ture Research ....................................................................................... 26
R E F E R E N C E S ................................................................................................................ 28
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

LIST OF TABLES
1. Experim ental R esults for O ptim al A-SMT
iv
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

LIST O F FIGU RES
1. Exam ple of G lobal R outing and Channel R outing ................................. 3
2. Types of Parallelogram s in A-Neighborhood............................................. 14
3. Exam ples of G rid G raphs in A-Geometry.................................................. 16
4. Separability P roo f in 4-Geom etry................................................................. 18
5. M ST N onseparable in 2-Geom etry B ut Separable in 4-Geometry. . 20
6. Exam ple of a Point S et.................................................................................... 25
v
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

CHAPTER I
VLSI DESIGN AUTOM ATION
In the com binatorial sense, the layout problem is a constrained optim iza
tion problem . We are given a description of a c ircu it-m ost often as a netlist,
which is a description of sw itching elements and their connecting wires. We look
for an assignm ent of geom etric coordinates of the circuit com ponents-in the plane
or in one of a few p lanar lay e rs-th a t satisfies the requirem ents of the fabrication
technology (sufficient spacing between wires, restricted num ber of wiring layers,
and so 011) and th a t minimizes certain cost criteria (the area of the sm allest cir
cum scribing rectangle, the length of the longest wire, and so 011).
P ractically all versions of the layout problem as a whole are in tractable;
th a t is, they are N P-hard . Thus, we have to resort to heuristic m ethods. One
of these m ethods is to break up the problem into subproblem s, which are then
solved one after the other. A lm ost always, these subproblem s are N P-hard as well,
bu t they are m ore am enable to heuristic solution than is the layout problem itself.
Each one of the layout subproblem s is decomposed in an analogous fashion. In this
way, we proceed to break up the optim ization problems until we reach prim itive
subproblem s. These subproblem s are not decomposed further, but ra ther are
solved directly, either op tim ally -if an efficient optim ization algorithm ex ists-o r
approxim ately.
T he m ost common way of breaking up the layout problem into subproblem s
is first to do com ponent placement, and then to determ ine the approxim ate course
of the wires in a global-routing phase. This phase may be followed by a topological
compaction th a t reduces th e a rea requirem ent of the layout, after which a detailed-
routing phase determ ines the exact course of the wires wit hout changing the layout
area. A fter detailed routing, a geometric-compaction phase may further reduce the
1
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

2
area requirem ent of the layout. This whole procedure m ay be done hierarchically,
s ta rtin g w ith large blocks as circuit com ponents, which are themselves laid out
recursively in the same m anner. This recursive process may be controlled by
algorithm s and heuristics th a t allow for choosing am ong layout alternatives for
th e blocks such th a t the layout area of the circuit is minimized. Exactly how a
given version of the layout problem is broken up into subproblem s depends on
bo th the design and the fabrication technology. For instance, in standard-cell
design, the detailed-routing phase essentially reduces to channel routing.
1.1 R outing Problem s in VLSI
R outing is an im portan t problem in circuit layout and between 20% to
30% of all VLSI layout design tim e is spent on routing. A set of term inals,
which are to be m utually connected, is called a net. The purpose of routing is to
estab lish connectivity am ong all term inals belonging to the same net, i.e., route
wires between all term inals of a net. The space available for wiring is the space
betw een two adjacent blocks. This space usually has a rectilinear shape. The
routing task is usually divided into two steps: (1) global routing, and (2) channel
routing.
T he purpose of global routing is to assign wires to channels, w ithout going
in to detailed routing. The usual approach is to route one net at a tim e sequentially
until all nets are connected. Figure 1 illustrates an example of global and channel
routing.
To connect a net, a greedy approach or maze runner rou ter is used. In
m ost cases “rip-up and rerou te” and m anual routing are necessary to route those
nets th a t can not be handled by global routers. This m ethod is only useful if a
reasonable order of nets can be found. U nfortunately, no m ethod exists for finding
such an order.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

3
Figure 1. Exam ple of Global R outing and Channel Routing.
A lthough global rou ting assigns nets to channels, the task of assigning nets
to specific tracks within channel still rem ains incomplete. In the next step, called
channel routing, the nets are assigned to specific tracks, thus com pleting all details
o f routing.
In VLSI design, channel routing is done by etching conductor pa ths on
one or more metallization layers. T he num ber of layers available depends on
th e fabrication technology. Traditionally, two layers have been used for routing.
However, three m etal layer technology also has been used by industry. The routing
m ay be done in such a m aim er th a t each net consists of vertical and horizontal
wire segments. Then, one layer is used for horizontal wire segments while the o ther
layers are used for vertical wire segments. The electrical connection between two
segm ents of a net is established through contact windows which are com m only
known as via-holes or sim ply vias.
T he channel routing problem depends 011 the num ber of layers being used
for routing. Thus based 011 num ber of layers, we have (a) one layer, (b) two layer
and (c) th ree layer routing problem s.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

4
1.2 Thesis O rganization
A prelim inary version of th is work was presented a t the Tw enty-N inth An
nual A llerton Conference on Com m unication, Control, and Com puting [16]. This
thesis is organized into five chapters. In C hapter II, we explain global routing
problem in VLSI Design and different approaches taken to solve it. In C hap
te r III, we introduce a new concept of Steiner tree in lion-rectilinear geometry.
In C hap ter IV, we present a polynom ial tim e algorithm to obtain Steiner tree
in A-geometry. Open problem s and future research directions in routing in non-
rectilinear geom etry are proposed in C hapter V.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

CHAPTER II
GLOBAL RO U TIN G
In th is chapter we review the global routing problem in VLSI Design au
tom ation and discuss the various approaches which have been taken to solve it.
As discussed earlier, the purpose of global router is to decompose a large
routing problem into small, m anageable problem s, so th a t the detailed routers can
be used to find exact routes efficiently. This decom position is done by assigning
each net to a set of rou ting regions such as channels, switchboxes, and river-route
areas. T he objective of th is assignm ent is to plan the routing globally to reduce the
chip size, shorten connection length, (and therefore delay), improve routability,
and balance congestion across the layout surface. In some references, this process
is also called loose routing or topological routing.
Before global rou ting phase begins, channels have to be defined on the
layout surface. Channel definition is stra ight forward for standard cells and gate
arrays because they are usually laid out in rows or columns w ith intervening
em pty areas for routing. Channel definition is less obvious for general cell layouts.
C hannel definition for general cells is highly dependent on placement. It has been
proven th a t order constrain ts for channel routing are acyclic if and only if the
channel s truc tu re corresponds to a slicing of the chip [18]. Partitioning-based
placem ent techniques have the desirable property of creating such a struc tu re as
a n a tu ra l effect. They are, therefore, well suited for general cell layouts which use
channel routers. A lot of work has already been done to autom atically generate
channel s truc tu res for general cell layouts [3].
5
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

6
2.1 Global R outing M odels
T here are basically two types of models used in global routing. T he one
which models the channel s truc tu re in the form of a channel graph and the o ther
which models the routing surface as a coarse routing grid. B oth of these models
u ltim ately view the problem as finding routing paths in a weighted graph, and
m any of the sam e algorithm s apply to bo th models.
A channel intersection graph has been defined as graph in which each
vertex represents a channel intersection and edge represents a channel or channel
subsection. By assigning the edge weights to model wire length and channel
capacity, such a graph can be used to select a channel sequence for each net. Any
shortest p a th algorithm can be used on this graph. In gate arrays and standard
cells, it is necessary to m odel the availability of feedthroughs. Feedthroghs are
w iring paths which cross the cell rows and thereby provide paths between two
channels which do not intersect. This means th a t connections can leave and
en ter the channels a t places other th an channel intersections, and therefore a
finer resolution is required. To model this feature the channel intersection graph
m ust be refined subdividing channels into minichannels. Edges are added to the
g raph to represent feedthroughs which connect adjacent channels. T he effect of
m inichannels is to model each channel not as a single edge but rather as a string
of edges. T he result is longer search tim e but more accuracy of the edge weights
and more accurate m odeling of a wire th a t does not span the entire length of the
channel.
A nother approach to global routing is to obtain the channel-graph by rep
resenting channels as vertices and channel adjacencies as edges (the opposite of
w hat is done in the channel intersection graph). T he use of such a graph is the
sam e as for the channel intersection graph. It is a weighted graph, and the edge
weights m odel the length and capacity of the routing channels. The differences
betw een these two m odels are subtle. For the channel intersection graph where
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

7
th e edges correspond to channels, the notion of density can be used to calculate
the portion of the cost due to congestion. For the o ther model, edges represent
the boundaries between adjacent channels. Rem aining capacity can be really de
term ined at these boundaries, but the area of the m aximum density of a channel
intersections. Representing the channel intersections as edges, therefore, may fail
to m odel the most critical portion of the channel in term s of density.
I t is possible to take greater advantage of the regularity of s tandard cell
and gate array structu res by confining the graph to be regular grid. T he wiring
capacity of the cells form ed by th is s tructu re is imposed on the routing surface.
T he wiring capacity of the cells form ed by this struc tu re is readily com putable.
T his s truc tu re is m odeled as a grid graph much like th a t used in Lee routers,
except th a t the wiring capacity in each direction is no longer lim ited to a single
segm ent. A cost is supplied to each edge in the graph based upon the rem aining
track capacity a t the cell boundary. Note th a t exact positioning of the wires along
th e cell edge is not modeled; th a t is the task of the detailed router. D uring the
global routing stage, only the capacity of the cell boundary and the num ber of
wires th a t are currently assigned to cross that boundary need to be known. W ire
length is modeled im plicitly by the fact th a t each cell is the sam e size as all others.
2.2 G lobal R outing Algorithms
Researchers have studied global routing for the past two decades. Various
approaches have been proposed such as hierarchical wiring [2], rerouting tech
niques [19], and sim ulated annealing [21]. W hichever model is selected, the task
of the global router is to find a suitable pa th for each connection through the
weighted graph. Ideally, a m inim al cost Steiner tree would be found for each
net, bu t th is problem is N P-C om plete in the general case and will be discussed
in the next chapter. Furtherm ore, since edge weights model w iring congestion,
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

8
th e optim al w iring for each net depends on wiring for all the o ther nets. Con
sequently, heuristic techniques m ust be used which yield acceptable results th a t
allow successful detailed routing of the circuit.
The first technique for global routing is using the fam iliar Lee router. In
th is technique, nets are sequentially selected for routing, and edge weights are
u pdated after each net is completed. W ithin each net, one pin is selected to be
the source point, and sym m etric expansion is perform ed until any one of the o ther
pins in the net is encountered. This subtree is then used as the source of the next
expansion, and the process continues until all pins in the net are in the same
subtree. The global rou ting models contain m any fewer vertices than the maze
routing model; therefore, goal-directed searching is not usually necessary. The
shortest pa th guarantee is still viable.
As in the Lee router, this net-at-a-tim e global routing is order dependent.
T here is a great deal of inconclusive study 011 connection ordering, but it is certain
th e results are different for different connection orderings of the sam e problem. A11
advantage of such an approach is th a t nets designed as critical because of delay
considerations can be favored by scheduling them early in the routing process.
A nother approach to initial global routing is to construct an initial layout
by determ ining the m inim um -distance Steiner tree for each net, ignoring other
nets in the process. By ignoring wiring capacities in th is step, the connection
ordering dependencies discussed earlier are avoided. This approach requires an
im provem ent phase of the global router to alleviate congestion. In other words,
som e routing regions may be grossly oversubscribed while others are left nearly
empty. However, this technique gives a good s ta rting point for im provement,
because each net is known to have its minimum path.
A th ird approach to global routing is to employ a least-com m itm ent tech
nique. For some simple nets, there is only one choice for routing. For exam ple, a
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

9
connection th a t goes s tra igh t across a single channel has only one feasible a lter
native to consider. This situa tion suggests a three-step process. Firstly, route the
short nets first (i.e. the nets which have only two or th ree pin nets). These com
prise approxim ately 75% of the nets in a typical design. Use a close-to-optim al
Steiner tree algorithm to route nets of interm ediate length. R oute rem aining big
long nets using maze routing procedures.
A nother variation of the routing techniques is to use iterative improve
m ent global route techniques. The search-type, in itial global routers are highly
dependent on net ordering. T he Steiner-type, initial global routers often result
in channels which are oversubscribed. Both of these problem s can be reduced by
following the initial global routing w ith an improvement phase. The basic idea of
th is approach is to s ta r t w ith a feasible global routing solution and improve it by
repeatedly selecting connections, removing them , and distinguished by how the
connections are selected for removal and how they are reconnected. One selection
approach is to identify critical nets. Critical nets are those nets which if removed
would make the design sm aller. These nets can be readily identified by finding a
position of maximum density along a critical channel. Nets which have segments
w ithin th is area are poten tia lly critical nets. These nets are then rerouted using
graph search technique. Because the graph is updated to reflect the current ca
pacities, the pa th chosen is likely to be different from the in itial routing solution
arrived a t w ith less com plete congestion information.
2.3 Steiner Tree Approach to G lobal R outing
Global routing of m ulti-term inal nets is an im portan t problem in physical
layout and design of VLSI circuits. This problem has been traditionally viewed as
a steiner tree problem [4, 13]. Due to th is application and m any other uses, steiner
trees have been a subject of intensive research [4, 7, 9, 11, 10, 12, 13,15, 20], A tree
interconnecting a set P — { p :,p 2 > • • • ,Pn} of specified points (demand points) in a
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

10
cartesian plane and some arb itra ry points Q = {q i ,q 2, ■ < • ,Qm} ( steiner points) is
called a steiner tree of P. T he location and num ber of steiner points is arbitrary. A
steiner tree w ith m inimum to ta l length is called a Steiner M inimum Tree (SM T).
I t has been shown th a t finding a Steiner M inimum Tree is N P-com plete [7]. In
view of the N P-com pleteness of the problem, several heuristic algorithm s have
been developed for this problem .
A global router based on Steiner M in-M ax tree has been presented in [4].
T he stra tegy is to route the net one by one. First the ordering of the nets to be
processed is decided. T hen for each net, global routing is obtained try ing to avoid
crowded channels. T he second step is form ulated as a graph problem . Given
a weighted graph, a special type of steiner tree called Steiner m in-m ax tree is
found. A Steiner m in-m ax tree is defined to be a spanning tree whose maximum
weight-edge is minimized over all Steiner trees. A polynom ial tim e algorithm
to find Steiner m in-m ax tree has also been presented in [4]. A nother approach
to find suboptim al Steiner trees is presented in [14]. This m ethods is based on
extending the two classic m inim al spanning tree algorithm s, P rim ’s and K ruskal’s.
In ano ther m ethod [1], algorithm s for special cases of rectilinear Steiner tree are
presented. In th is technique, a special case is considered in which the points lie on
the boundary of a rectilinear rectangle and give an 0 (n ) algorithm to construct
a minimum rectilinear S teiner tree for such points.
A quite different approach to global routing using Steiner tree has been
taken by [5]. In this technique, the problem of global routing has been consid
ered aim ing to sim ultaneously minimize the wire lengths and density through the
regions. Previous global routers have a ttem pted th is goal, however, they mini
mized one of the two param eters as the main objective and proposed heuristics
for minimizing the o ther param eter. This task is accom plished by introducing
the concept of weighted Steiner trees. A W eighted Steiner tree is defined as a
Steiner tree w ith weighted lengths. The proposed global rou ter a t each step finds
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

11
a w eighted Steiner tree for a net, where real points represent the regions containing
the term inals of the given net, Steiner points represent interm ediate regions and
weight of a region represents its complexity. In another approach, Steiner trees
have been applied to find routing in switchbox in presence of obstacles [6 ]. The
sw itchbox rectilinear Steiner tree problem is to construct an optim al rectilinear
Steiner tree interconnecting n term inals on the perim eter of a switchbox w ithout
crossing any obstacles inside the switchbox. However, intersecting boundaries of
obstacles is allowed. An 0 ( n ) tim e algorithm is presented to solve this problem .
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

CHAPTER III
IMPROVED GLOBAL ROUTING USING A-GEOMETRY
So far, we have seen th a t several approaches have been taken to the problem
of G lobal routing. M ulti-term inal nets can be modeled as minimum cost Steiner
trees. However, finding the minimum cost Steiner tree is an N P-C om plete problem
and hence, m any heuristic approaches to find minimum cost Steiner trees are
known to exist as discussed in the previous chapter. All the approaches in the
past deal w ith finding the Steiner tree in rectilinear geometry. In th is thesis, we
consider a different approach to finding Steiner trees. We consider the concept of
Steiner trees in A-geometry.
T he Steiner tree whose edges are constrained to be of rectilinear shape is
called Rectilinear Steiner Tree (RST). I t is well known th a t any minimum cost
rectilinear spanning tree (RM ST) is a | approxim ation of a SM T [10]. As a result ,
m any heuristic algorithm s use minimum spanning tree (M ST) U U Cl/ Stci rting point
and apply local m odifications to obtain a SMT. In this way, these algorithm s
can guaran tee th a t weight of the SM T is at most § of the weight of the optim al
tree [8 , 9 ,1 3 , 15]. A key idea of separability of trees, which leads to optim al steiner
trees for some special cases was introduced in [13]. Two non-adjacent edges are
called separable if their corresponding layouts do not intersect. A tree is called
separable if no two non-adjacent edges intersect. Based on th is idea, it was shown
th a t it is possible to develop a polynomial tim e algorithm to find optim al steiner
tree derivable from a separable minimum spanning tree.
T he restriction of layout to rectilinear geomet ry and thus restriction to the
use of only rectilinear steiner trees was necessary to account for restricted com
pu ting capabilities. Recently, due to enhanced com puting capabilities and need
for high perform ance layout designs, non-rectilinear geom etry is gaining ground.
12
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

13
In order to obtain sm aller length steiner trees, we have recently in troduced the
concept of A-geometry [17] discussed in detail in next chapter.
In A-geometry only edges w ith angles Z7r/A, for any integer i, are allowed,
where A = 2,4,6 ,8 ....0 0 . Obviously we can see th a t A-geometry always includes
rectilinear edges and perhaps a useful geom etry w ith respect to the fabrication
technologies.
3.1 Basic Concepts of A-Geometry
In th is section we establish some basic properties of A-geometry which will
be used in la ter rem aining of the thesis. The concept of A-geometry is very closely
rela ted to uniform geom etry [20]. The key difference is inclusion of rectilinear
orientations in all A-geometries.
D e f in i t io n 1 A X-angle is defined as an angle of measure irr/X for an integer i
(0 < i < A), where A = ‘2k for k being a 'positive integer.
D e f in i t io n 2 A \-parallelogram is a parallelogram with boundaries at X-angles.
D e f in i t io n 3 Let e = p^po be an edge. A X-neighborhood of e is the closure of a
X-parallelogram with e as a diagonal. We denote a X-neighborhood of e as N \(e) .
For example, when A=4, only the above shown six parallelogram s are pos
sible A-neighborhoods. We denote them as ty p e l through typeG as shown in
Figure 2. We observe th a t for a given edge e there exists a A-neighborhood which is
enclosed in all o ther A-neighborhoods. Such a A-neighborhood is called a smallest
A-neighborhood of e.
For a given edge w ith the angle of m easurem ent of 0° and 45°, the ty p e l A-
neighborhood is sm allest. T he readers may check other cases for type2 ('45° —90°),
type3 (90° — 135°) and type4 (135° — 180°). In fact, only ty p e l, type2, type3 and
type4 A-neighborhoods are possible to be smallest. We s ta te th is observation as
the following lemma.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

Tn»i
Figure 2. T ypes of Parallelogram s in A-Neighborhood.
L e m m a 1 For a given edge e, there exists a smallest X-neighborhood which is
among typel, typeS, type3 and tigpef.
D e f in i t io n 4 A X-layout of an edge e — pipn is the path from p i to p2 along the
smallest X-neighborhood of e.
T he num ber of A-Iayouts of an M ST edge is an exponential function of
the num ber of points on the subgrid w ithin the bounding parallelogram of the
two end points of the edge. Choosing different A-layouts for the edges of the
M ST will result in different am ount of overlaps am ong these layouts. If we merge
these overlapping portions by in troducing appropriate steiner points, the resulting
s tru c tu re is a steiner tree of the given point set. These steiner points are a result
of m erging the overlaps between the various A-layouts.
D e f in i t io n 5 Let e = pppo be an edge. The X-distance between p\ and p2, or
X-length of e, is defined as the length of the X-layout of e. We denote X-distance
as d \ (p i ,P 2) ■
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

15
D e f in i t io n 6 A X-MST (X-minimum spanning tree) of a point set K in the Eu
clidean plane is a minimum spanning tree, of the complete graph G (K ) over K ,
with respect to X-distance.
D e f in i t io n 7 A X-ST (X-steiner tree) is a steiner tree in which edges are all at
X-angles.
Iu considering A-Steiner M inimum Tree (A-SMT), we shall first identify
the com plete set of possible steiner points. The nodes of A-SMT which are not
dem and points and have degree a t least 3 are the steiner points. The optim al A-
SM T of a point set is known to be subgraph of its underlying grid [1 1 ]. Therefore
it is sufficient to consider routes for the edges of Minimum Spanning Tree on the
underlying grid.
D e f in i t io n 8 The X-underlying grid of a point s e t K is the grid obtained by draw
ing the lines through each point of K at all X-angles.
The following theorem gives a relationship between a given point set K
and A.
T h e o r e m 1 Let K be a point set in the plane. Then the maximum number of
points in the X-underlying grid is given by p = •U(A~*)(A:~.1I + &
P ro o f : A grid is determ ined by A and K . At most there are Ak lines in a grid.
Therefore there are at m ost (A — 1)(A: — 1) possible steiner points on each line.
In th is way, we count each possible steiner points on two lines. Therefore, to ta l
num ber of possible steiner points is . The to ta l num ber of dem and
points is given to be k. Hence to ta l num ber of grid points is p — 'U(A~^)(A:~1) +& 0
Clearly for rectilinear geom etry th a t is A = 2, then p = k 2. Also we see
th a t for Euclidean geom etry th a t is A = oo, then the num ber of grid points is
infinite as expected. Some examples of grid graphs in A-geometry are shown in
F igure 3.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

16
( a ) G r i d G ra ph f o r n=4 a n d A=4 (b) g r i d G r a p h f o r n=2 and A=«
Figure 3. Exam ples of Grid G raphs in A-Geometry.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

17
T h e o r e m 2 There exists a A -SM T for a given point set on its X-underlying grid.
P ro o f : Since there always exists a A-layout for a given edge e = p xp 2 in the A-
underlying grid. We can always connect two points using the A-layout. This can
be done for each edge of the A-MST. This means th a t a A-SMT can be constructed
using the A-underlying grid for the given point set. B
3.2 A-Separability of Minimum Spanning Trees
In th is section we establish th a t any minimum cost spanning tree in 4-
geom etry is A-separable. From this we show results for higher geometry. We s ta r t
by first defining the concept of A-separability. A-geometry.
D e f in i t io n 9 Let T be a tree. Let ex and 62 be two non-adjacent edges in T . If
there exists two X-neighborhoods N^(ef) and N\{eo) such that N \ ( e x) r N x (e 2) = (f>,
then ex and eo, are X-separable. T is X-separable if any two non-adjacent edges are
X-separable.
T h e o r e m 3 Any minimal spanning tree over a given set in the plane is X-separable
for A = 4.
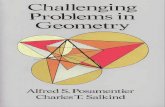
P ro o f : Let T be a given m inim al spanning tree. Assume th a t T is not 4-separable.
T hen there exists two non-adjacent edges e\ = p xp 2 and e2 = q\Q2 such th a t e\
and e2 are not 4-separable. Let A4 (e4) and W4 (e2) be two sm allest neighbors of
ex and e2 respectively. T hen lV4 (ei) fl lV4 (e2 ) # <f). By lem m a 1, there are four
possible sm allest neighbors. Since reflections abou t 90° line or about 45° line do
not change the smallest 4-neighborhood.
W ithou t loss of generality, let p x be disconnected from e2 if ex is removed
from T and let qx be disconnected from e4 if e2 is removed. We also assum e the
length of e4 is greater th a n or equal to the length of e2 , i.e. |e4 1 > |e21, where |e|
denotes the length of the edge e,-, (i = 1 , 2 ).
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

18
I
, S I *
Figure 4. Separability P roof in 4-Geometry.
Let us draw a circle w ith center a t pi and |e j| as radius (See Figure 4.).
N either qi or q2 can be inside the circle, otherwise we can remove e4 and connect
p j to this point to m ake a smaller cost spanning tree. This contradicts the fact
th a t T is a minimum cost spanning tree. Now, let us assum e th a t bo th q\ and
qo lie on the boundary of the circle. Let us divide the plane into eight regions
R i th rough R$ as shown in the Figure 4. The regions, R \ through R 7 are all
considered outside the circle. Under our assum ptions th a t iV4 (ei) fl iV4 (e2) ^ <j>
and |e j| > |e2|, we shall consider positions of qi and q2 in all regions R 1 through
R r.
Case 1 (gi and q2 lie in / ? 4 U R$ U R G): qi and q2 can not bo th he in i ?4 U
R b U Ro, otherwise iV4 (e2) fl iV4 (ej) = <j).
C ase 2 (gi and q2 lie in R G(J R 7) : qx and q2 can not bo th lie in R G U R 7, by
the sam e reasoning as above, if they lie then iV4 (e2) fl iV4 (ei) = <f>.
Case 3 (qi and q2 lie in R 2 U R 2 U R 7): By same argum ents as above, 51 and
q2 can not both lie in R2 U R 2 U R 7 otherwise iV4 (e2) D AT4 (ej) = 4>.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

19
Case 4 {q\ and q2 lie ill R 2 U R i U i?4) : <71 and q2 can not both lie in n Rz U
i?i U by same argum ents as above.
Case 5 (<72 lies a t the boundary of R i and R j and q\ is in R 2 U Ry)\ In this
case if d i(q i ,p 2) < |e2|, then we can remove e2 and connect qi to p 2 to
construct a sm aller cost spanning tree. This is a contradiction to the
fact th a t T is a m inim um spanning tree, otherwise d i(q i ,q2) > l^ l-
T he same argum ent leads to the conclusion th a t we can not have the
' neighborhoods of the edges ei and e2 intersect each other.
Case 6 (<71 lies a t the boundary of R i and R 2 and q2 is in Ro U R 2): In this
case if di(q2,p 2) < l ^ l , then we can remove e2 and connect q2 to p2 to
construct a sm aller cost spanning tree. This is a contradiction to the
fact th a t T is a m inim um spanning tree, otherwise di(q2,q2) > \e2\.
T he sam e argum ent leads to the conclusion th a t we can not have the
neighborhoods of the edges e4 and e2 intersect each other. In the same
way, we can discuss the boundary of R 2 and R%.
Case 7 (If q2 lies 011 the boundary of the circle and Ri): In this case since q2
is on the boundary 011 the circle, N i(e2) fl iV4 (e4) = <f>. We need to
consider only the case of qi being in region R$. The boundary case
is the worst case as shown in the Figure 4. qi can not be in R$ since
otherwise \e2\ > |e i| which is a contradiction. In th is case, we know
A^(e2) is of type 2. T hen q2b is parallel to p2c. This ensures th a t
A ^(ei) fl N i(e2) = <j>.
Since we consider all cases which show th a t N i(e{) fl A 4 (e2) — <f>, we con
clude th a t our previous assum ption is impossible. This proves the theorem. H.
T he following theorem establishes a relationship between separability con
cept in different geometries.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

20
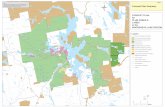
Figure 5. M ST N onseparable in 2-Geometry B ut Separable in 4-Geometry.
T h e o r e m 4 If a X-MST for given a point set is Xl-separable then this is X2-
separable also for 2 < A* < A2 < oo where X1 and X2 are even positive integers.
P ro o f : It is easy to see th a t enclosing parallelogram of points pi and pi in A2-
geom etry properly lies w ithin the enclosing parallelogram of the sam e points in
Ai-geometry. This is due to the fact th a t smaller legal angles are allowed in
A2-geom etry as com pared to legal angles in Ai-geometry. It follows from the
separability definition th a t if two edges have non-intersecting parallelogram s in
Ai-geometry, then their respective parallelogram s in A2 geom etry will be non
intersecting. 1
It can be seen from Figure 5. th a t the converse of the theorem 4 is not
true. Theorem 3 and 4 lead to the following result.
T h e o r e m 5 Any minimum spanning tree for given a point set in the plane is
X-separable for any even lambda > 4.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

CHAPTER IV
ALGORITHM FOR OPTIMAL STEINER TREE IN A-GEOMETRY
As m entioned above, [13] uses separability in rectilinear geom etry to de
velop an algorithm for op tim al steiner tree derivable from minimum spanning tree.
T he inpu t to the algorithm is a separable minimum spanning tree. The basic idea
of th is algorithm is to first find separable M ST in rectilinear geom etry for the
given point set, then construct optim al SM T considering the rectilinear layouts
for each edge of the M ST and maximizing the overlap between the adjacent edges.
We have developed a algorithm to find optim al steiner trees in A-geometry.
O ur algorithm is a generalized version of the one presented in [13] and finds the
optim al steiner tree in A-geometry for any value of A. T he algorithm s ta rts in a
bo ttom up approach by finding the layouts for smaller point sets for the A-MST
edges and then combine these steiner trees recursively in a hierarchical fashion,
to obtain the SM T for the given point set. F irst we investigate the problem of
finding distances in A m etric, which are needed to construct the M ST. We refer
to a M ST in A m etric as A-MST
Given two points pi and po in a two dimensional plane, then A-distance
d is t(p i ,P 2 ,X) refers to the distance between points pi and po, as the sum m ation
of lengths of line segm ents joining these points. These line segments must have
legal directions in A-geometry and dist(pi,po, A) should be minimum am ong all
such paths. [2 2 ] showed th a t the minimum distance between two points consists
of a t most two line segments. Moreover, these line segments make the minimum
possible (legal) angle w ith line segment joining pi and po in Euclidean geometry.
Using th is fact we can determ ine dist(p i,p j, A) for pairs of points in P. We can
now form a com plete graph G = (V, E), such th a t each vertex Vi G V correspond
to point pi and weight of each edge = d ist(p i,p j, A). We can then find
21
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

22
A-MST by applying the m inim um cost spanning tree algorithm to find the M ST
in graph G. As we proved above th a t A-MST in 4-geom etry and higher geometries
is always separable, then th is implies th a t input to our algorithm is always a
separable A-MST which is a prerequisite to our algorithm to find the optim al
steiner m inim um tree. A fter we find the separable A-MST, we process the A-MST
edges in a bo ttom up fashion by finding the A-2 -layouts and A-3-layouts for each
given edges of A-MST in th e given A-geometry and combining these layouts to get
the best layout using the dynam ic program m ing approach.
T he form ally s ta ted algorithm is as follows
Algorithm LA M BD A -O PT-SM TQ
Input: A-Separable A-MST
Output: O ptim al A-SMT
Begin A lgorithm
Tp := A-Separable A-MST
/* C onstruction of R ooted Tree Tp * /
for all e i E T P = (V ',E ') do
if e,- = leaf edge then
root r = ei
E' = E' - { ei }
for all e,- & T P = {V ',E ') do
V" = V"U {e,} where Tp = {V",E")
/* C onstruction of A-SMT for each edge of Tp * /
/* Let us denote to ta l num ber of possible A-3-layouts of an edge by L3 * /
/* and to ta l num ber of child edges for a given edge by C E * /
m in-layout 0 ;
for i := 1 to L3 of root e
for j := 1 to C E of root edge e in Tp do
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

23
3-layout.y = COM PUTEJLAYOUT(ey)
SAVE(3-layoutjy)
/* C onstruction of O ptim al A-SMT from T r * /
for i := 1 to L3 of e do
for j := 1 to C E of the root edge e in T r do
for k := 1 to L3 for each child edge ey
cur-layout = M ERG E.LA YOU T(layout(eyt ),layout(e,))
if cur-layout < m in-layout then
m in-layout = cur-layout;
/* D etails of the COM PUTE_L AY O U T routine * /
CO M PUTE_LAY OU T(e)
begin
for j := 1 to LZ of e do
for k := 1 to num ber of child edges of e do
if ef. is leaf edge
then Ijk := M E R G E (layou t(ey ),layou t^ ))
else COM PUTE_LAYOUT(e*)
end
end A lgorithm
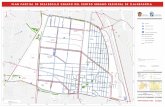
We im plem ented the algorithm in C on SPA R C station 1+ . To illustrate
our algorithm , let us consider point set in Figure 6 . T he algorithm presented
in [13] produced rectilinear steiner tree w ith a cost 15.00 Using our algorithm
we obtained 4-SM T w ith cost 13.64 and 6 -SM T with cost 13.06 Table 1 shows
the experim ental results ob tained w ith several random ly generated examples. It
can be observed th a t average length of the steiner tree can be reduced by 8.72%
by using 4-geom etry as com pared to rectilinear geometry. However the length is
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

24
reduced to only 4.18% if 6 -geom etry is used as com pared to 4-geometry. As a
resu lt we conclude th a t for all practical purpose use of 4-geom etry is sufficient
for global routing because higher geometries do not significantly contribute to the
gain.
Table 1
Experim ental R esults for O ptim al A-SMT
Num
of
Points
Rectilinear
Geom etry
4-geom etry 6 -geom etry % G ain
from 2 to 4-
georaetry
% Gain
from 4 to 6 -
geom etry
16 75.00 6 6 .0 0 63.00 1 2 .0 0 4.55
32 99.00 90.00 8 6 .0 0 9.09 4.44
64 140.00 1 1 2 .0 0 107.00 1 2 .8 6 4.46
128 169.00 156.57 152.39 7.36 2.67
256 236.00 216.00 208.47 8.47 3.67
512 317.00 309.00 305.56 2.52 1 .1 1
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

25
I
3
C ost o f 4-SM T =r 13.64C ost o f 2-SM T = 15
C ost of 6-SMT = 13.OB
5
Figure 6 . Exam ple of a Poiut Set.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

CHAPTER V
CONCLUSIONS AND FU T U R E RESEARCH
5.1 Conclusions
We study the problem of global routing of m ultiterm inal nets in a general
ized geometry, called A-geometry, in order to reduce the delay and consequently
enhance the perform ance. In A-geometry, edges with angles in f A, for all i, are a l
lowed, where A (> 2) is a positive integer. A = 2 , 4 and oo correspond to rectilinear,
45° and Euclidean geometries respectively. In this thesis, we study separability of
trees in A-geometry. Global routing can significantly be improved by considering
A-geometry because the angles of increasing orientations are allowed as we go to
higher geometries. We show th a t it is possible to find optim al steiner tree in A-
geom etry from minimum spanning trees and develop a polynom ial tim e algorithm .
We prove th a t 4-geom etry is sufficient and there is no need to consider geometries
beyond 4-geom etry for global routing, where the com putational overhead become
too complex and the gain is not considered worth the efforts. This algorithm can
be used by the advanced VLSI design tools in order to reduce the routing length
and hence delay. We have im plem ented the algorithm in C on SPA R C station 1 + .
Experim ental results show th a t our 4-geom etry algorithm perform s 10-12% b e tte r
th a n rectilinear geom etry for random ly point sets for some difficult circuits.
5.2 Future Research
A-geometry can be used in a num ber of VLSI design problems. As the
need for high perform ance increases, the reduction in routing lengths becomes
more im portan t. Since, A-geometry reduces lengths com pared to the rectilinear
geometry, th is can be applied successfully to chip technologies such as Sea-of-Gate
26
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

27
Arrays, O ver-the-Cell R outing, and also M ultichip M odules routing. We plan to
investigate the areas which can be used for A-geometry.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

REFEREN CES
[1] Pankaj K um ar Agarwal, “A lgorithm s for Special Cases of Rectilinear Steiner Trees: Points on the B oundary of a Rectilinear R ectangle N ETW O RK S, Vol. 20, pp. 453-485, 1990.
[2] M. B urstein and R. Pelavin, “Hierachical Channel R outer,” Proceedings of the 20th Design A utom ation Conference, A C M /IE E E Com puter Society, Los A lam itos, CA, pp. 591-597, June 1983.
[3] C. S. Chow, “Phoenix: An Interactive Hierarchical Topological Floorplauning P lacer,” M aster’s Thesis, D epartm ent of Electrical Engineering and Com puter Science, M assachusetts In stitu te of Technology, June 1985.
[4] C. Chiang, M. Sarrafzadeh, and C. K. Wong, “A Powerful Global Router: Based on Steiner M in-M ax Trees,” Proceedings of IEEE In ternational Conference on C om puter-A ided Design, A C M /IE E E C om puter Society, Los Alamitos, CA, pp. 2-5, November 7-10, 1989.
[5] C. Chiang, M. Sarrafzadeh, and C. K. Wong, “A W eighted-Steiner-Tree- Based Global R ou ter,” Research R eport, Electrical Engineering and Compu ter Science, N orthw estern University, Chicago, IL, 1991.
[6 ] C. Chiang, M. Sarrafzadeh, and C. K. Wong, “An O ptim al A lgorithm for Rectilinear Steiner Trees for Switchbox with O bstacles,” Research R eport, Electrical Engineering and Com puter Science, N orthw estern University, Chicago, IL, 1991.
[7] M. R. G arey and D. S. Johnson, “The Rectilinear Steiner Tree Problem is N P-C om plete,” SIAM J. Appl. M ath ., Vol. 32, pp. 826-834, 1977.
[8 ] F. K. Hwang, “An O (n lo g n ) Algorithm for R ectilinear M inimum Spanning Tree,” Journal of the Association for Com puting M achinery, Vol. 26, No. 2, pp. 177-182, April 1979.
[9] F. K. Hwang, “An O (n lo g n ) Algorithm for Suboptim al Rectilinear Steiner Trees,” Transactions on C ircuits and Systems, Vol. 26, No. 1, pp. 75-77, January 1979.
[10] F. K. Hwang, “On Steiner M inim al Trees W ith R ectilinear D istance,” SIAM Journal of Applied M athem atics, Vol. 30, No. 1 , pp. 104-114, January 1976.
[11] M. H anan, “On S teiner’s problem W ith Rectilinear D istance,” SIAM Journal of Applied M athem atics, Vol. 30, No. 1 , pp. 104-114, January 1976.
28
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

29
[12] J . M. Ho, G. V ijayan, and C. K. Wong, “C onstructing the O ptim al Rectilinear Steiner Tree Derivable From a M inimum Spanning Tree,” Proceedings of IE E E In ternational Conference on Com puter-A ided Design, A C M /IE E E C om puter Society, Los A lam itos, CA, pp. 5-8, 1989.
[13] J . M. Ho, G. Vijayan, and C. K. Wong, “A New Approach to the R ectilinear S teiner tree Problem ,” IE E E Transactions on Com puter-A ided Design, Vol. 9, No. 2, pp. 185-193, February 1985.
[14] F. D. Lewis and N. Van Cleave, “Correct and Provably Efficient M ethods for R ectilinear Steiner Tree G eneration,” Proceedings for the F irst G reat Lakes Sym posium on VLSI, IEEE Com puter Society, Kalam azoo, pp. 185- 193, M arch 1991.
[15] D. T. Lee, J . M. Sm ith, and J. S. Liebman, “An O (n lo g n ) H euristic Algorithm Rectilinear Steiner Tree Problem ,” Engineering O ptim ization, Vol. 4, No. 4, pp. 179-192, 1980.
[16] S. B urm an, II. Chen, and N. A. Sherwani, “Improved Global R outing using A-Geometry,” Proceedings for the Tw enty-N inth A nnual Conference on Comm unication, Control, and Com puting, D epartm ent of E lectrical Engineering and C om puter Sciences, University of Illinois, U rbana-C ham paign, A llerton House, M onticello, IL, pp. 1083-1091, O ctober 1991.
[17] S. B urm an, and N. A. Sherwani, “O ptim al Steiner Trees Algorithm For 45° and Generalized G rids,” Technical R eport, T R /91-15 , W estern M ichigan U niversity, K alam azoo, MI.
[18] K. J. Supowit and E. A. Slutz, “Placem ent Algorithm s for Custom VLSI,” Proceedings of the 20th Design A utom ation Conference, A C M /IE E E Computer Society, Los A lam itos, CA, pp 164-170, June 1983.
[19] B. S. Ting and B. N. T ien, “Routing Techniques for G ate A rrays,” IE E E Transactions on Com puter-A ided Design, Vol. CAD-2, No. 4, pp. 301-312, O ctober 1983.
[20] M. Sarrafzadeh, and C. K. Wong, “Hierarchical Steiner Tree C onstruction in Uniform O rien tations,” Research Report, D epartm ent of Electrical Engineering and C om puter Science, N orthwestern University, Chicago, IL, 1990.
[21] M. P. Vecchi and S. K irkpatrick, “Global W iring by Sim ulated A nnealing,” IE E E T ransactions on Com puter-A ided Design, Vol. CAD-2, No. 4, pp. 215- 222, O ctober 1983.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.

30
[22] P. W idm ayer, Y. F. W u, and C. K. Wong, “On Some D istance Problem s in Fixed O rien tations,” SIAM Journal of Com puting, Vol. 16, No. 4, pp. 728-746, A ugust 1987.
Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.