
Implicit Computational Geometry - Instituto Nacional de...
227
Implicit Computational Geometry Daniel Reem ICMC, University of S˜ ao Paulo, S˜ ao Carlos, Brazil E-mail: [email protected] http://w3.impa.br/ ~ dream June 2015 A small perturbation of talks given at two Seminars on Dynamics of the Pontificia Universidad Cat´ olica de Chile: Din´ amica Porte˜ na [Valpara´ ıso, June 5, 2015] and Santiago’s joint Seminar on Dynamics (SCS-D) [Santiago, June 8, 2015], Chile Reset stopwatch Daniel Reem (ICMC) Implicit computational geometry June 2015 1 / 41
Transcript of Implicit Computational Geometry - Instituto Nacional de...

Implicit Computational Geometry
Daniel Reem
ICMC, University of Sao Paulo, Sao Carlos, Brazil
E-mail: [email protected]
http://w3.impa.br/~dream
June 2015
A small perturbation of talks given at two Seminars on Dynamicsof the Pontificia Universidad Catolica de Chile: Dinamica
Portena [Valparaıso, June 5, 2015] and Santiago’s joint Seminaron Dynamics (SCS-D) [Santiago, June 8, 2015], Chile
Reset stopwatch
Daniel Reem (ICMC) Implicit computational geometry June 2015 1 / 41

Daniel Reem (ICMC) Implicit computational geometry June 2015 2 / 41
Motivation: an apparently innocent problem
P1,P2 are small chips on a flat printed circuit board.
(Murata 2002): Can we put two wires (curves) C1,C2 so that eachwire is equidistant from one chip and the other wire?
Goal: To minimize chance of failure in the board.
Mathematical proof of existence and uniqueness of such curves?
Figure: source: Asano-Matousek-Tokuyama 2007a.
Daniel Reem (ICMC) Implicit computational geometry June 2015 2 / 41

Motivation: an apparently innocent problem
P1,P2 are small chips on a flat printed circuit board.
(Murata 2002): Can we put two wires (curves) C1,C2 so that eachwire is equidistant from one chip and the other wire?
Goal: To minimize chance of failure in the board.
Mathematical proof of existence and uniqueness of such curves?
Figure: source: Asano-Matousek-Tokuyama 2007a.
Daniel Reem (ICMC) Implicit computational geometry June 2015 2 / 41

Motivation: an apparently innocent problem
P1,P2 are small chips on a flat printed circuit board.
(Murata 2002): Can we put two wires (curves) C1,C2 so that eachwire is equidistant from one chip and the other wire?
Goal: To minimize chance of failure in the board.
Mathematical proof of existence and uniqueness of such curves?
Figure: source: Asano-Matousek-Tokuyama 2007a.
Daniel Reem (ICMC) Implicit computational geometry June 2015 2 / 41

Motivation: an apparently innocent problem
P1,P2 are small chips on a flat printed circuit board.
(Murata 2002): Can we put two wires (curves) C1,C2 so that eachwire is equidistant from one chip and the other wire?
Goal:
To minimize chance of failure in the board.
Mathematical proof of existence and uniqueness of such curves?
Figure: source: Asano-Matousek-Tokuyama 2007a.
Daniel Reem (ICMC) Implicit computational geometry June 2015 2 / 41
Motivation: an apparently innocent problem
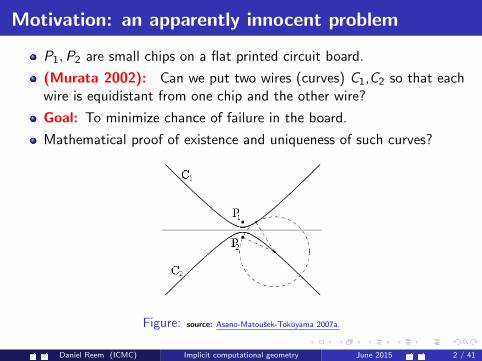
P1,P2 are small chips on a flat printed circuit board.
(Murata 2002): Can we put two wires (curves) C1,C2 so that eachwire is equidistant from one chip and the other wire?
Goal: To minimize chance of failure in the board.
Mathematical proof of existence and uniqueness of such curves?
Figure: source: Asano-Matousek-Tokuyama 2007a.
Daniel Reem (ICMC) Implicit computational geometry June 2015 2 / 41
Motivation: an apparently innocent problem
P1,P2 are small chips on a flat printed circuit board.
(Murata 2002): Can we put two wires (curves) C1,C2 so that eachwire is equidistant from one chip and the other wire?
Goal: To minimize chance of failure in the board.
Mathematical proof of existence and uniqueness of such curves?
Figure: source: Asano-Matousek-Tokuyama 2007a.
Daniel Reem (ICMC) Implicit computational geometry June 2015 2 / 41
Motivation: an apparently innocent problem
P1,P2 are small chips on a flat printed circuit board.
(Murata 2002): Can we put two wires (curves) C1,C2 so that eachwire is equidistant from one chip and the other wire?
Goal: To minimize chance of failure in the board.
Mathematical proof of existence and uniqueness of such curves?
Figure: source: Asano-Matousek-Tokuyama 2007a.
Daniel Reem (ICMC) Implicit computational geometry June 2015 2 / 41
Background: Classical computational geometry
Algorithms for computing geometric objects
Ways to represent them in the computers
Useful properties of the objects
Applications in other domains
High emphasize on:
2D,3D Euclidean spaces
Combinatorial issues
Examples of objects: polytopes, arrangements, Delaunaytriangulations, Voronoi diagrams
Classical objects: defined by explicit relations
Daniel Reem (ICMC) Implicit computational geometry June 2015 3 / 41
Background: Classical computational geometry
Algorithms for computing geometric objects
Ways to represent them in the computers
Useful properties of the objects
Applications in other domains
High emphasize on:
2D,3D Euclidean spaces
Combinatorial issues
Examples of objects: polytopes, arrangements, Delaunaytriangulations, Voronoi diagrams
Classical objects: defined by explicit relations
Daniel Reem (ICMC) Implicit computational geometry June 2015 3 / 41
Background: Classical computational geometry
Algorithms for computing geometric objects
Ways to represent them in the computers
Useful properties of the objects
Applications in other domains
High emphasize on:
2D,3D Euclidean spaces
Combinatorial issues
Examples of objects: polytopes, arrangements, Delaunaytriangulations, Voronoi diagrams
Classical objects: defined by explicit relations
Daniel Reem (ICMC) Implicit computational geometry June 2015 3 / 41

Background: Classical computational geometry
Algorithms for computing geometric objects
Ways to represent them in the computers
Useful properties of the objects
Applications in other domains
High emphasize on:
2D,3D Euclidean spaces
Combinatorial issues
Examples of objects: polytopes, arrangements, Delaunaytriangulations, Voronoi diagrams
Classical objects: defined by explicit relations
Daniel Reem (ICMC) Implicit computational geometry June 2015 3 / 41

Background: Classical computational geometry
Algorithms for computing geometric objects
Ways to represent them in the computers
Useful properties of the objects
Applications in other domains
High emphasize on:
2D,3D Euclidean spaces
Combinatorial issues
Examples of objects: polytopes, arrangements, Delaunaytriangulations, Voronoi diagrams
Classical objects: defined by explicit relations
Daniel Reem (ICMC) Implicit computational geometry June 2015 3 / 41
Background: Classical computational geometry
Algorithms for computing geometric objects
Ways to represent them in the computers
Useful properties of the objects
Applications in other domains
High emphasize on:
2D,3D Euclidean spaces
Combinatorial issues
Examples of objects: polytopes, arrangements, Delaunaytriangulations, Voronoi diagrams
Classical objects: defined by explicit relations
Daniel Reem (ICMC) Implicit computational geometry June 2015 3 / 41
Background: Classical computational geometry
Algorithms for computing geometric objects
Ways to represent them in the computers
Useful properties of the objects
Applications in other domains
High emphasize on:
2D,3D Euclidean spaces
Combinatorial issues
Examples of objects: polytopes, arrangements, Delaunaytriangulations, Voronoi diagrams
Classical objects: defined by explicit relations
Daniel Reem (ICMC) Implicit computational geometry June 2015 3 / 41

Background: Classical computational geometry
Algorithms for computing geometric objects
Ways to represent them in the computers
Useful properties of the objects
Applications in other domains
High emphasize on:
2D,3D Euclidean spaces
Combinatorial issues
Examples of objects: polytopes, arrangements, Delaunaytriangulations, Voronoi diagrams
Classical objects: defined by explicit relations
Daniel Reem (ICMC) Implicit computational geometry June 2015 3 / 41
Background: Classical computational geometry
Algorithms for computing geometric objects
Ways to represent them in the computers
Useful properties of the objects
Applications in other domains
High emphasize on:
2D,3D Euclidean spaces
Combinatorial issues
Examples of objects: polytopes, arrangements, Delaunaytriangulations, Voronoi diagrams
Classical objects: defined by explicit relations
Daniel Reem (ICMC) Implicit computational geometry June 2015 3 / 41

Background: Classical computational geometry
Algorithms for computing geometric objects
Ways to represent them in the computers
Useful properties of the objects
Applications in other domains
High emphasize on:
2D,3D Euclidean spaces
Combinatorial issues
Examples of objects: polytopes, arrangements, Delaunaytriangulations, Voronoi diagrams
Classical objects:
defined by explicit relations
Daniel Reem (ICMC) Implicit computational geometry June 2015 3 / 41
Background: Classical computational geometry
Algorithms for computing geometric objects
Ways to represent them in the computers
Useful properties of the objects
Applications in other domains
High emphasize on:
2D,3D Euclidean spaces
Combinatorial issues
Examples of objects: polytopes, arrangements, Delaunaytriangulations, Voronoi diagrams
Classical objects: defined by explicit relations
Daniel Reem (ICMC) Implicit computational geometry June 2015 3 / 41
Example: Classical Voronoi diagrams
There are point sites P1, . . . ,Pn in the Euclidean plane
To each site Pi we associate a set (cell) Vi
The cell Vi is defined as follows:
Vi = x ∈ R2 : d(x ,Pi) ≤ d(x ,⋃j 6=i
Pj).
The plane is decomposed into cells
Voronoi diagrams appear in a huge number of places in scienceand technology and have diverse applications.
Daniel Reem (ICMC) Implicit computational geometry June 2015 4 / 41
Example: Classical Voronoi diagrams
There are point sites P1, . . . ,Pn in the Euclidean plane
To each site Pi we associate a set (cell) Vi
The cell Vi is defined as follows:
Vi = x ∈ R2 : d(x ,Pi) ≤ d(x ,⋃j 6=i
Pj).
The plane is decomposed into cells
Voronoi diagrams appear in a huge number of places in scienceand technology and have diverse applications.
Daniel Reem (ICMC) Implicit computational geometry June 2015 4 / 41

Example: Classical Voronoi diagrams
There are point sites P1, . . . ,Pn in the Euclidean plane
To each site Pi we associate a set (cell) Vi
The cell Vi is defined as follows:
Vi = x ∈ R2 : d(x ,Pi) ≤ d(x ,⋃j 6=i
Pj).
The plane is decomposed into cells
Voronoi diagrams appear in a huge number of places in scienceand technology and have diverse applications.
Daniel Reem (ICMC) Implicit computational geometry June 2015 4 / 41
Example: Classical Voronoi diagrams
There are point sites P1, . . . ,Pn in the Euclidean plane
To each site Pi we associate a set (cell) Vi
The cell Vi is defined as follows:
Vi = x ∈ R2 : d(x ,Pi) ≤ d(x ,⋃j 6=i
Pj).
The plane is decomposed into cells
Voronoi diagrams appear in a huge number of places in scienceand technology and have diverse applications.
Daniel Reem (ICMC) Implicit computational geometry June 2015 4 / 41
Example: Classical Voronoi diagrams
There are point sites P1, . . . ,Pn in the Euclidean plane
To each site Pi we associate a set (cell) Vi
The cell Vi is defined as follows:
Vi = x ∈ R2 : d(x ,Pi) ≤ d(x ,⋃j 6=i
Pj).
The plane is decomposed into cells
Voronoi diagrams appear in a huge number of places in scienceand technology and have diverse applications.
Daniel Reem (ICMC) Implicit computational geometry June 2015 4 / 41
Example: Classical Voronoi diagrams
There are point sites P1, . . . ,Pn in the Euclidean plane
To each site Pi we associate a set (cell) Vi
The cell Vi is defined as follows:
Vi = x ∈ R2 : d(x ,Pi) ≤ d(x ,⋃j 6=i
Pj).
The plane is decomposed into cells
Voronoi diagrams appear in a huge number of places in scienceand technology and have diverse applications.
Daniel Reem (ICMC) Implicit computational geometry June 2015 4 / 41

Example: Classical Voronoi diagrams
There are point sites P1, . . . ,Pn in the Euclidean plane
To each site Pi we associate a set (cell) Vi
The cell Vi is defined as follows:
Vi = x ∈ R2 : d(x ,Pi) ≤ d(x ,⋃j 6=i
Pj).
The plane is decomposed into cells
Voronoi diagrams appear in a huge number of places in scienceand technology and have diverse applications.
Daniel Reem (ICMC) Implicit computational geometry June 2015 4 / 41
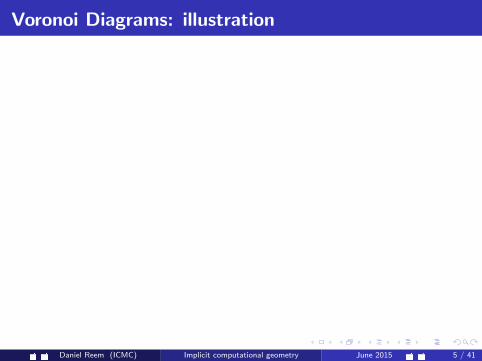
Voronoi Diagrams: illustration
Figure: A Voronoi diagram of 10 point sites in a square in (R2, `2).
Daniel Reem (ICMC) Implicit computational geometry June 2015 5 / 41

Voronoi Diagrams: illustration
Figure: A Voronoi diagram of 10 point sites in a square in (R2, `2).
Daniel Reem (ICMC) Implicit computational geometry June 2015 5 / 41
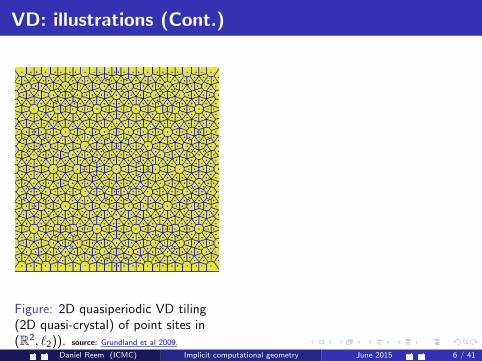
VD: illustrations (Cont.)
Figure: 2D quasiperiodic VD tiling(2D quasi-crystal) of point sites in(R2, `2)). source: Grundland et al 2009.
Figure: The Delaunay (Delone) graphof Fig. 3. source: Grundland et al 2009.
Daniel Reem (ICMC) Implicit computational geometry June 2015 6 / 41
VD: illustrations (Cont.)
Figure: 2D quasiperiodic VD tiling(2D quasi-crystal) of point sites in(R2, `2)). source: Grundland et al 2009.
Figure: The Delaunay (Delone) graphof Fig. 3. source: Grundland et al 2009.
Daniel Reem (ICMC) Implicit computational geometry June 2015 6 / 41

VD: illustrations (Cont.)
Figure: 2D quasiperiodic VD tiling(2D quasi-crystal) of point sites in(R2, `2)). source: Grundland et al 2009.
Figure: The Delaunay (Delone) graphof Fig. 3. source: Grundland et al 2009.
Daniel Reem (ICMC) Implicit computational geometry June 2015 6 / 41

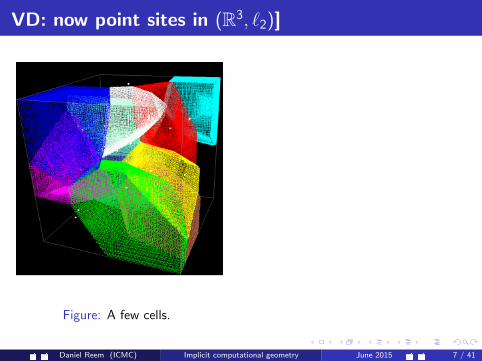
VD: now point sites in (R3, `2)]
Figure: A few cells.
Figure: V-cells of bcc lattice(bitruncated cubic honeycombtessellation). source: absoluteastronomy.com
Daniel Reem (ICMC) Implicit computational geometry June 2015 7 / 41
VD: now point sites in (R3, `2)]
Figure: A few cells.
Figure: V-cells of bcc lattice(bitruncated cubic honeycombtessellation). source: absoluteastronomy.com
Daniel Reem (ICMC) Implicit computational geometry June 2015 7 / 41

VD: now point sites in (R3, `2)]
Figure: A few cells.
Figure: V-cells of bcc lattice(bitruncated cubic honeycombtessellation). source: absoluteastronomy.com
Daniel Reem (ICMC) Implicit computational geometry June 2015 7 / 41

VD: beyond the Euclidean space
Figure: A few V-cells of point sitesin (R3, `1).
Figure: A few V-cells of point sites in(R3, `8).
Daniel Reem (ICMC) Implicit computational geometry June 2015 8 / 41

VD: beyond the Euclidean space
Figure: A few V-cells of point sitesin (R3, `1).
Figure: A few V-cells of point sites in(R3, `8).
Daniel Reem (ICMC) Implicit computational geometry June 2015 8 / 41

VD: beyond the Euclidean space
Figure: A few V-cells of point sitesin (R3, `1).
Figure: A few V-cells of point sites in(R3, `8).
Daniel Reem (ICMC) Implicit computational geometry June 2015 8 / 41
Implicit Computational Geometry
Introduced by Asano-Matousek-Tokuyama in 2007a,b (withoutthis name)
Geometric objects: defined by implicit relations, e.g., fixedpoint equation involving sets.
Many challenges, e.g.,:
Existence?
Uniqueness?
Computation of exotic objects?
Properties?
Daniel Reem (ICMC) Implicit computational geometry June 2015 9 / 41

Implicit Computational Geometry
Introduced by Asano-Matousek-Tokuyama in 2007a,b (withoutthis name)
Geometric objects: defined by implicit relations, e.g., fixedpoint equation involving sets.
Many challenges, e.g.,:
Existence?
Uniqueness?
Computation of exotic objects?
Properties?
Daniel Reem (ICMC) Implicit computational geometry June 2015 9 / 41

Implicit Computational Geometry
Introduced by Asano-Matousek-Tokuyama in 2007a,b (withoutthis name)
Geometric objects:
defined by implicit relations, e.g., fixedpoint equation involving sets.
Many challenges, e.g.,:
Existence?
Uniqueness?
Computation of exotic objects?
Properties?
Daniel Reem (ICMC) Implicit computational geometry June 2015 9 / 41
Implicit Computational Geometry
Introduced by Asano-Matousek-Tokuyama in 2007a,b (withoutthis name)
Geometric objects: defined by implicit relations, e.g., fixedpoint equation involving sets.
Many challenges, e.g.,:
Existence?
Uniqueness?
Computation of exotic objects?
Properties?
Daniel Reem (ICMC) Implicit computational geometry June 2015 9 / 41
Implicit Computational Geometry
Introduced by Asano-Matousek-Tokuyama in 2007a,b (withoutthis name)
Geometric objects: defined by implicit relations, e.g., fixedpoint equation involving sets.
Many challenges, e.g.,:
Existence?
Uniqueness?
Computation of exotic objects?
Properties?
Daniel Reem (ICMC) Implicit computational geometry June 2015 9 / 41
Implicit Computational Geometry
Introduced by Asano-Matousek-Tokuyama in 2007a,b (withoutthis name)
Geometric objects: defined by implicit relations, e.g., fixedpoint equation involving sets.
Many challenges, e.g.,:
Existence?
Uniqueness?
Computation of exotic objects?
Properties?
Daniel Reem (ICMC) Implicit computational geometry June 2015 9 / 41
Implicit Computational Geometry
Introduced by Asano-Matousek-Tokuyama in 2007a,b (withoutthis name)
Geometric objects: defined by implicit relations, e.g., fixedpoint equation involving sets.
Many challenges, e.g.,:
Existence?
Uniqueness?
Computation of exotic objects?
Properties?
Daniel Reem (ICMC) Implicit computational geometry June 2015 9 / 41

Implicit Computational Geometry
Introduced by Asano-Matousek-Tokuyama in 2007a,b (withoutthis name)
Geometric objects: defined by implicit relations, e.g., fixedpoint equation involving sets.
Many challenges, e.g.,:
Existence?
Uniqueness?
Computation of exotic objects?
Properties?
Daniel Reem (ICMC) Implicit computational geometry June 2015 9 / 41
Implicit Computational Geometry
Introduced by Asano-Matousek-Tokuyama in 2007a,b (withoutthis name)
Geometric objects: defined by implicit relations, e.g., fixedpoint equation involving sets.
Many challenges, e.g.,:
Existence?
Uniqueness?
Computation of exotic objects?
Properties?
Daniel Reem (ICMC) Implicit computational geometry June 2015 9 / 41

Example: zone diagrams
ZD: A variation of Voronoi diagrams:
In a Voronoi diagram we associate to the site Pi the cell
Vi = x : d(x ,Pi) ≤ d(x ,⋃j 6=i
Pj).
In a zone diagram we associate to Pi the cell
Ri = x : d(x ,Pi) ≤ d(x ,⋃j 6=i
Rj).
Suspicion: A circular definition?
Answer: later.
Daniel Reem (ICMC) Implicit computational geometry June 2015 10 / 41

Example: zone diagrams
ZD: A variation of Voronoi diagrams:
In a Voronoi diagram we associate to the site Pi the cell
Vi = x : d(x ,Pi) ≤ d(x ,⋃j 6=i
Pj).
In a zone diagram we associate to Pi the cell
Ri = x : d(x ,Pi) ≤ d(x ,⋃j 6=i
Rj).
Suspicion: A circular definition?
Answer: later.
Daniel Reem (ICMC) Implicit computational geometry June 2015 10 / 41

Example: zone diagrams
ZD: A variation of Voronoi diagrams:
In a Voronoi diagram we associate to the site Pi the cell
Vi = x : d(x ,Pi) ≤ d(x ,⋃j 6=i
Pj).
In a zone diagram we associate to Pi the cell
Ri = x : d(x ,Pi) ≤ d(x ,⋃j 6=i
Rj).
Suspicion: A circular definition?
Answer: later.
Daniel Reem (ICMC) Implicit computational geometry June 2015 10 / 41
Example: zone diagrams
ZD: A variation of Voronoi diagrams:
In a Voronoi diagram we associate to the site Pi the cell
Vi = x : d(x ,Pi) ≤ d(x ,⋃j 6=i
Pj).
In a zone diagram we associate to Pi the cell
Ri = x : d(x ,Pi) ≤ d(x ,⋃j 6=i
Rj).
Suspicion: A circular definition?
Answer: later.
Daniel Reem (ICMC) Implicit computational geometry June 2015 10 / 41

Example: zone diagrams
ZD: A variation of Voronoi diagrams:
In a Voronoi diagram we associate to the site Pi the cell
Vi = x : d(x ,Pi) ≤ d(x ,⋃j 6=i
Pj).
In a zone diagram we associate to Pi the cell
Ri = x : d(x ,Pi) ≤ d(x ,⋃j 6=i
Rj).
Suspicion: A circular definition?
Answer: later.
Daniel Reem (ICMC) Implicit computational geometry June 2015 10 / 41
Example: zone diagrams
ZD: A variation of Voronoi diagrams:
In a Voronoi diagram we associate to the site Pi the cell
Vi = x : d(x ,Pi) ≤ d(x ,⋃j 6=i
Pj).
In a zone diagram we associate to Pi the cell
Ri = x : d(x ,Pi) ≤ d(x ,⋃j 6=i
Rj).
Suspicion: A circular definition?
Answer:
later.
Daniel Reem (ICMC) Implicit computational geometry June 2015 10 / 41

Example: zone diagrams
ZD: A variation of Voronoi diagrams:
In a Voronoi diagram we associate to the site Pi the cell
Vi = x : d(x ,Pi) ≤ d(x ,⋃j 6=i
Pj).
In a zone diagram we associate to Pi the cell
Ri = x : d(x ,Pi) ≤ d(x ,⋃j 6=i
Rj).
Suspicion: A circular definition?
Answer: later.Daniel Reem (ICMC) Implicit computational geometry June 2015 10 / 41

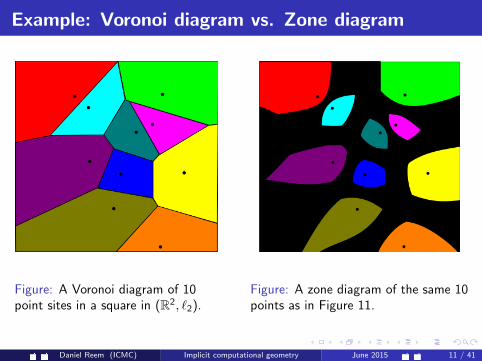
Example: Voronoi diagram vs. Zone diagram
Figure: A Voronoi diagram of 10point sites in a square in (R2, `2).
Figure: A zone diagram of the same 10points as in Figure 11.
Daniel Reem (ICMC) Implicit computational geometry June 2015 11 / 41
Example: Voronoi diagram vs. Zone diagram
Figure: A Voronoi diagram of 10point sites in a square in (R2, `2).
Figure: A zone diagram of the same 10points as in Figure 11.
Daniel Reem (ICMC) Implicit computational geometry June 2015 11 / 41
ICG: main objects (so far)
Trisectors
k-sectors
Zone diagrams
Double zone diagrams
Territory diagrams
Double territory diagrams
Neutral region
Daniel Reem (ICMC) Implicit computational geometry June 2015 12 / 41
ICG: main objects (so far)
Trisectors
k-sectors
Zone diagrams
Double zone diagrams
Territory diagrams
Double territory diagrams
Neutral region
Daniel Reem (ICMC) Implicit computational geometry June 2015 12 / 41
ICG: main objects (so far)
Trisectors
k-sectors
Zone diagrams
Double zone diagrams
Territory diagrams
Double territory diagrams
Neutral region
Daniel Reem (ICMC) Implicit computational geometry June 2015 12 / 41
ICG: main objects (so far)
Trisectors
k-sectors
Zone diagrams
Double zone diagrams
Territory diagrams
Double territory diagrams
Neutral region
Daniel Reem (ICMC) Implicit computational geometry June 2015 12 / 41

ICG: main objects (so far)
Trisectors
k-sectors
Zone diagrams
Double zone diagrams
Territory diagrams
Double territory diagrams
Neutral region
Daniel Reem (ICMC) Implicit computational geometry June 2015 12 / 41

ICG: main objects (so far)
Trisectors
k-sectors
Zone diagrams
Double zone diagrams
Territory diagrams
Double territory diagrams
Neutral region
Daniel Reem (ICMC) Implicit computational geometry June 2015 12 / 41
ICG: main objects (so far)
Trisectors
k-sectors
Zone diagrams
Double zone diagrams
Territory diagrams
Double territory diagrams
Neutral region
Daniel Reem (ICMC) Implicit computational geometry June 2015 12 / 41

ICG: main objects (so far)
Trisectors
k-sectors
Zone diagrams
Double zone diagrams
Territory diagrams
Double territory diagrams
Neutral region
Daniel Reem (ICMC) Implicit computational geometry June 2015 12 / 41

ICG: how did it start?
With the question of Murata about the printed board
A generalization (Murata 2002): Given k ≥ 2 integer and two objects(modules, obstacles) P, Q in the Euclidean plane, can we draw“(k − 1)-equally spaced” curves (wires) C1,C2, . . . ,Ck−1 separatingthem?
Goal: To minimize chance of failure in printed circuit board layout.
Variation: to minimize chance of collision between robots moving onthe curves (Imai et al. 2010)
Daniel Reem (ICMC) Implicit computational geometry June 2015 13 / 41
ICG: how did it start?
With the question of Murata about the printed board
A generalization (Murata 2002): Given k ≥ 2 integer and two objects(modules, obstacles) P, Q in the Euclidean plane, can we draw“(k − 1)-equally spaced” curves (wires) C1,C2, . . . ,Ck−1 separatingthem?
Goal: To minimize chance of failure in printed circuit board layout.
Variation: to minimize chance of collision between robots moving onthe curves (Imai et al. 2010)
Daniel Reem (ICMC) Implicit computational geometry June 2015 13 / 41
ICG: how did it start?
With the question of Murata about the printed board
A generalization (Murata 2002):
Given k ≥ 2 integer and two objects(modules, obstacles) P, Q in the Euclidean plane, can we draw“(k − 1)-equally spaced” curves (wires) C1,C2, . . . ,Ck−1 separatingthem?
Goal: To minimize chance of failure in printed circuit board layout.
Variation: to minimize chance of collision between robots moving onthe curves (Imai et al. 2010)
Daniel Reem (ICMC) Implicit computational geometry June 2015 13 / 41

ICG: how did it start?
With the question of Murata about the printed board
A generalization (Murata 2002): Given k ≥ 2 integer and two objects(modules, obstacles) P, Q in the Euclidean plane, can we draw“(k − 1)-equally spaced” curves (wires) C1,C2, . . . ,Ck−1 separatingthem?
Goal: To minimize chance of failure in printed circuit board layout.
Variation: to minimize chance of collision between robots moving onthe curves (Imai et al. 2010)
Daniel Reem (ICMC) Implicit computational geometry June 2015 13 / 41
ICG: how did it start?
With the question of Murata about the printed board
A generalization (Murata 2002): Given k ≥ 2 integer and two objects(modules, obstacles) P, Q in the Euclidean plane, can we draw“(k − 1)-equally spaced” curves (wires) C1,C2, . . . ,Ck−1 separatingthem?
Goal:
To minimize chance of failure in printed circuit board layout.
Variation: to minimize chance of collision between robots moving onthe curves (Imai et al. 2010)
Daniel Reem (ICMC) Implicit computational geometry June 2015 13 / 41

ICG: how did it start?
With the question of Murata about the printed board
A generalization (Murata 2002): Given k ≥ 2 integer and two objects(modules, obstacles) P, Q in the Euclidean plane, can we draw“(k − 1)-equally spaced” curves (wires) C1,C2, . . . ,Ck−1 separatingthem?
Goal: To minimize chance of failure in printed circuit board layout.
Variation: to minimize chance of collision between robots moving onthe curves (Imai et al. 2010)
Daniel Reem (ICMC) Implicit computational geometry June 2015 13 / 41
ICG: how did it start?
With the question of Murata about the printed board
A generalization (Murata 2002): Given k ≥ 2 integer and two objects(modules, obstacles) P, Q in the Euclidean plane, can we draw“(k − 1)-equally spaced” curves (wires) C1,C2, . . . ,Ck−1 separatingthem?
Goal: To minimize chance of failure in printed circuit board layout.
Variation: to minimize chance of collision between robots moving onthe curves (Imai et al. 2010)
Daniel Reem (ICMC) Implicit computational geometry June 2015 13 / 41

ICG: history (Cont.)
Answer
Assume: P, Q are points
k = 2: Yes, C1=bisector (line)
k = 4: Yes, C1, C3 are parabolas, C2 is line between them
k 6= 2, 4: Unclear, not obvious
k = 3: The official birth of ICG (Asano-Matousek-Tokuyama 2007a,b)
Daniel Reem (ICMC) Implicit computational geometry June 2015 14 / 41
ICG: history (Cont.)
Answer
Assume: P, Q are points
k = 2: Yes, C1=bisector (line)
k = 4: Yes, C1, C3 are parabolas, C2 is line between them
k 6= 2, 4: Unclear, not obvious
k = 3: The official birth of ICG (Asano-Matousek-Tokuyama 2007a,b)
Daniel Reem (ICMC) Implicit computational geometry June 2015 14 / 41
ICG: history (Cont.)
Answer
Assume: P, Q are points
k = 2: Yes, C1=bisector (line)
k = 4: Yes, C1, C3 are parabolas, C2 is line between them
k 6= 2, 4: Unclear, not obvious
k = 3: The official birth of ICG (Asano-Matousek-Tokuyama 2007a,b)
Daniel Reem (ICMC) Implicit computational geometry June 2015 14 / 41
ICG: history (Cont.)
Answer
Assume: P, Q are points
k = 2: Yes, C1=bisector (line)
k = 4: Yes, C1, C3 are parabolas, C2 is line between them
k 6= 2, 4: Unclear, not obvious
k = 3: The official birth of ICG (Asano-Matousek-Tokuyama 2007a,b)
Daniel Reem (ICMC) Implicit computational geometry June 2015 14 / 41

ICG: history (Cont.)
Answer
Assume: P, Q are points
k = 2: Yes, C1=bisector (line)
k = 4: Yes, C1, C3 are parabolas, C2 is line between them
k 6= 2, 4: Unclear, not obvious
k = 3: The official birth of ICG (Asano-Matousek-Tokuyama 2007a,b)
Daniel Reem (ICMC) Implicit computational geometry June 2015 14 / 41
ICG: history (Cont.)
Answer
Assume: P, Q are points
k = 2: Yes, C1=bisector (line)
k = 4: Yes, C1, C3 are parabolas, C2 is line between them
k 6= 2, 4: Unclear, not obvious
k = 3: The official birth of ICG (Asano-Matousek-Tokuyama 2007a,b)
Daniel Reem (ICMC) Implicit computational geometry June 2015 14 / 41

Illustration: k-sectors, k = 2, 4, the Euclidean plane
Figure: A 2-sector (bisector) ofpoint sites: a line
Figure: A 4-sector of those points:two parabolas+line
Daniel Reem (ICMC) Implicit computational geometry June 2015 15 / 41

Illustration: k-sectors, k = 2, 4, the Euclidean plane
Figure: A 2-sector (bisector) ofpoint sites: a line
Figure: A 4-sector of those points:two parabolas+line
Daniel Reem (ICMC) Implicit computational geometry June 2015 15 / 41
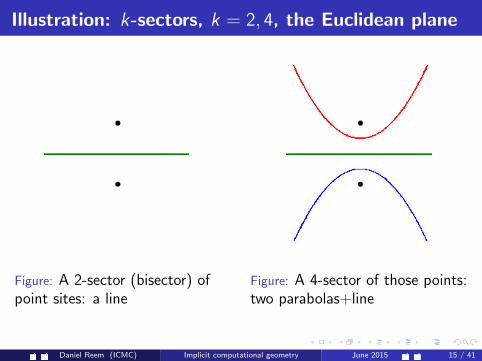
Illustration: k-sectors, k = 2, 4, the Euclidean plane
Figure: A 2-sector (bisector) ofpoint sites: a line
Figure: A 4-sector of those points:two parabolas+line
Daniel Reem (ICMC) Implicit computational geometry June 2015 15 / 41

Notation
From now on:
(X , d) is a metric space
I 6= ∅ is a set of indices
∅ 6= P,Q ⊆ X and ∅ 6= Pi ⊆ X , i ∈ I are called sites
For x ∈ X , ∅ 6= A ⊆ X let
d(x ,A) = infd(x , a) : a ∈ A
d(P,Q) = infd(p, q) : p ∈ P, q ∈ Q
Positively separated sites: when inf i 6=j d(Pi ,Pj) > 0
Daniel Reem (ICMC) Implicit computational geometry June 2015 16 / 41
Notation
From now on:
(X , d) is a metric space
I 6= ∅ is a set of indices
∅ 6= P,Q ⊆ X and ∅ 6= Pi ⊆ X , i ∈ I are called sites
For x ∈ X , ∅ 6= A ⊆ X let
d(x ,A) = infd(x , a) : a ∈ A
d(P,Q) = infd(p, q) : p ∈ P, q ∈ Q
Positively separated sites: when inf i 6=j d(Pi ,Pj) > 0
Daniel Reem (ICMC) Implicit computational geometry June 2015 16 / 41

Notation
From now on:
(X , d) is a metric space
I 6= ∅ is a set of indices
∅ 6= P,Q ⊆ X and ∅ 6= Pi ⊆ X , i ∈ I are called sites
For x ∈ X , ∅ 6= A ⊆ X let
d(x ,A) = infd(x , a) : a ∈ A
d(P,Q) = infd(p, q) : p ∈ P, q ∈ Q
Positively separated sites: when inf i 6=j d(Pi ,Pj) > 0
Daniel Reem (ICMC) Implicit computational geometry June 2015 16 / 41
Notation
From now on:
(X , d) is a metric space
I 6= ∅ is a set of indices
∅ 6= P,Q ⊆ X and ∅ 6= Pi ⊆ X , i ∈ I are called sites
For x ∈ X , ∅ 6= A ⊆ X let
d(x ,A) = infd(x , a) : a ∈ A
d(P,Q) = infd(p, q) : p ∈ P, q ∈ Q
Positively separated sites: when inf i 6=j d(Pi ,Pj) > 0
Daniel Reem (ICMC) Implicit computational geometry June 2015 16 / 41
Notation
From now on:
(X , d) is a metric space
I 6= ∅ is a set of indices
∅ 6= P,Q ⊆ X and ∅ 6= Pi ⊆ X , i ∈ I are called sites
For x ∈ X , ∅ 6= A ⊆ X let
d(x ,A) = infd(x , a) : a ∈ A
d(P,Q) = infd(p, q) : p ∈ P, q ∈ Q
Positively separated sites: when inf i 6=j d(Pi ,Pj) > 0
Daniel Reem (ICMC) Implicit computational geometry June 2015 16 / 41
Notation
From now on:
(X , d) is a metric space
I 6= ∅ is a set of indices
∅ 6= P,Q ⊆ X and ∅ 6= Pi ⊆ X , i ∈ I are called sites
For x ∈ X , ∅ 6= A ⊆ X let
d(x ,A) = infd(x , a) : a ∈ A
d(P,Q) = infd(p, q) : p ∈ P, q ∈ Q
Positively separated sites: when inf i 6=j d(Pi ,Pj) > 0
Daniel Reem (ICMC) Implicit computational geometry June 2015 16 / 41

Notation
From now on:
(X , d) is a metric space
I 6= ∅ is a set of indices
∅ 6= P,Q ⊆ X and ∅ 6= Pi ⊆ X , i ∈ I are called sites
For x ∈ X , ∅ 6= A ⊆ X let
d(x ,A) = infd(x , a) : a ∈ A
d(P,Q) = infd(p, q) : p ∈ P, q ∈ Q
Positively separated sites: when inf i 6=j d(Pi ,Pj) > 0
Daniel Reem (ICMC) Implicit computational geometry June 2015 16 / 41
Notation
From now on:
(X , d) is a metric space
I 6= ∅ is a set of indices
∅ 6= P,Q ⊆ X and ∅ 6= Pi ⊆ X , i ∈ I are called sites
For x ∈ X , ∅ 6= A ⊆ X let
d(x ,A) = infd(x , a) : a ∈ A
d(P,Q) = infd(p, q) : p ∈ P, q ∈ Q
Positively separated sites: when inf i 6=j d(Pi ,Pj) > 0
Daniel Reem (ICMC) Implicit computational geometry June 2015 16 / 41
Formal definitions: bisector
Definition
The bisector (midset, equidistant set, conflict set, mediatrix) of P,Q:
bisect(P,Q) := x ∈ X : d(x ,P) = d(x ,Q)
Daniel Reem (ICMC) Implicit computational geometry June 2015 17 / 41

Formal definitions: bisector
Definition
The bisector (midset, equidistant set, conflict set, mediatrix) of P,Q:
bisect(P,Q) := x ∈ X : d(x ,P) = d(x ,Q)
Daniel Reem (ICMC) Implicit computational geometry June 2015 17 / 41

Formal definitions: k-sectors
Definition
The k-sector of P,Q: a tuple (C1, . . . ,Ck−1) of nonempty subsets of Xsuch that for all i ∈ 1, . . . , k − 1
Ci = bisect(Ci−1,Ci+1),
where C0 := P, Ck := Q
Implicit definition: a solution to a system of equations involvingsets.
Existence of solutions is not clear!
Daniel Reem (ICMC) Implicit computational geometry June 2015 18 / 41

Formal definitions: k-sectors
Definition
The k-sector of P,Q: a tuple (C1, . . . ,Ck−1) of nonempty subsets of Xsuch that for all i ∈ 1, . . . , k − 1
Ci = bisect(Ci−1,Ci+1),
where C0 := P, Ck := Q
Implicit definition: a solution to a system of equations involvingsets.
Existence of solutions is not clear!
Daniel Reem (ICMC) Implicit computational geometry June 2015 18 / 41

Formal definitions: k-sectors
Definition
The k-sector of P,Q: a tuple (C1, . . . ,Ck−1) of nonempty subsets of Xsuch that for all i ∈ 1, . . . , k − 1
Ci = bisect(Ci−1,Ci+1),
where C0 := P, Ck := Q
Implicit definition: a solution to a system of equations involvingsets.
Existence of solutions is not clear!
Daniel Reem (ICMC) Implicit computational geometry June 2015 18 / 41

Formal definitions: k-sectors
Definition
The k-sector of P,Q: a tuple (C1, . . . ,Ck−1) of nonempty subsets of Xsuch that for all i ∈ 1, . . . , k − 1
Ci = bisect(Ci−1,Ci+1),
where C0 := P, Ck := Q
Implicit definition: a solution to a system of equations involvingsets.
Existence of solutions is not clear!
Daniel Reem (ICMC) Implicit computational geometry June 2015 18 / 41

Formal definitions: the Dom mapping
(Pi)i∈I is a tuple of nonempty subsets of X
Xi = C : Pi ⊆ C ⊆ X, ∀i ∈ I .
Y :=∏
i∈I Xi
Dom : Y → Y is the function assigning to R := (Ri)i∈I ∈ Ythen vector S := (Si)i∈I ∈ Y defined by
Si := x ∈ X : d(x ,Pi) ≤ d(x ,⋃j 6=i
Rj).
Si is well-defined since (Pi)i∈I and (Ri)i∈I are given.
Daniel Reem (ICMC) Implicit computational geometry June 2015 19 / 41
Formal definitions: the Dom mapping
(Pi)i∈I is a tuple of nonempty subsets of X
Xi = C : Pi ⊆ C ⊆ X, ∀i ∈ I .
Y :=∏
i∈I Xi
Dom : Y → Y is the function assigning to R := (Ri)i∈I ∈ Ythen vector S := (Si)i∈I ∈ Y defined by
Si := x ∈ X : d(x ,Pi) ≤ d(x ,⋃j 6=i
Rj).
Si is well-defined since (Pi)i∈I and (Ri)i∈I are given.
Daniel Reem (ICMC) Implicit computational geometry June 2015 19 / 41

Formal definitions: the Dom mapping
(Pi)i∈I is a tuple of nonempty subsets of X
Xi = C : Pi ⊆ C ⊆ X, ∀i ∈ I .
Y :=∏
i∈I Xi
Dom : Y → Y is the function assigning to R := (Ri)i∈I ∈ Ythen vector S := (Si)i∈I ∈ Y defined by
Si := x ∈ X : d(x ,Pi) ≤ d(x ,⋃j 6=i
Rj).
Si is well-defined since (Pi)i∈I and (Ri)i∈I are given.
Daniel Reem (ICMC) Implicit computational geometry June 2015 19 / 41

Formal definitions: the Dom mapping
(Pi)i∈I is a tuple of nonempty subsets of X
Xi = C : Pi ⊆ C ⊆ X, ∀i ∈ I .
Y :=∏
i∈I Xi
Dom : Y → Y is the function assigning to R := (Ri)i∈I ∈ Ythen vector S := (Si)i∈I ∈ Y defined by
Si := x ∈ X : d(x ,Pi) ≤ d(x ,⋃j 6=i
Rj).
Si is well-defined since (Pi)i∈I and (Ri)i∈I are given.
Daniel Reem (ICMC) Implicit computational geometry June 2015 19 / 41
Formal definitions: the Dom mapping
(Pi)i∈I is a tuple of nonempty subsets of X
Xi = C : Pi ⊆ C ⊆ X, ∀i ∈ I .
Y :=∏
i∈I Xi
Dom : Y → Y is the function assigning to R := (Ri)i∈I ∈ Ythen vector S := (Si)i∈I ∈ Y defined by
Si := x ∈ X : d(x ,Pi) ≤ d(x ,⋃j 6=i
Rj).
Si is well-defined since (Pi)i∈I and (Ri)i∈I are given.
Daniel Reem (ICMC) Implicit computational geometry June 2015 19 / 41

Formal definitions: the Dom mapping
(Pi)i∈I is a tuple of nonempty subsets of X
Xi = C : Pi ⊆ C ⊆ X, ∀i ∈ I .
Y :=∏
i∈I Xi
Dom : Y → Y is the function assigning to R := (Ri)i∈I ∈ Ythen vector S := (Si)i∈I ∈ Y defined by
Si := x ∈ X : d(x ,Pi) ≤ d(x ,⋃j 6=i
Rj).
Si is well-defined since (Pi)i∈I and (Ri)i∈I are given.
Daniel Reem (ICMC) Implicit computational geometry June 2015 19 / 41
Formal definitions: zone and double zone diagrams
Definition
A zone diagram is a fixed point of Dom, i.e.,
R = Dom(R)
In other words, a solution to the following system of equations:
Ri = x ∈ X : d(x ,Pi) ≤ d(x ,⋃j 6=i
Rj).
Definition
A double zone diagram is a fixed point of Dom2, i.e.,
R = Dom2(R).
Daniel Reem (ICMC) Implicit computational geometry June 2015 20 / 41
Formal definitions: zone and double zone diagrams
Definition
A zone diagram is a fixed point of Dom, i.e.,
R = Dom(R)
In other words, a solution to the following system of equations:
Ri = x ∈ X : d(x ,Pi) ≤ d(x ,⋃j 6=i
Rj).
Definition
A double zone diagram is a fixed point of Dom2, i.e.,
R = Dom2(R).
Daniel Reem (ICMC) Implicit computational geometry June 2015 20 / 41

Formal definitions: zone and double zone diagrams
Definition
A zone diagram is a fixed point of Dom, i.e.,
R = Dom(R)
In other words, a solution to the following system of equations:
Ri = x ∈ X : d(x ,Pi) ≤ d(x ,⋃j 6=i
Rj).
Definition
A double zone diagram is a fixed point of Dom2, i.e.,
R = Dom2(R).
Daniel Reem (ICMC) Implicit computational geometry June 2015 20 / 41

Formal definitions: zone and double zone diagrams
Definition
A zone diagram is a fixed point of Dom, i.e.,
R = Dom(R)
In other words, a solution to the following system of equations:
Ri = x ∈ X : d(x ,Pi) ≤ d(x ,⋃j 6=i
Rj).
Definition
A double zone diagram is a fixed point of Dom2, i.e.,
R = Dom2(R).
Daniel Reem (ICMC) Implicit computational geometry June 2015 20 / 41
Formal definitions: zone and double zone diagrams
Definition
A zone diagram is a fixed point of Dom, i.e.,
R = Dom(R)
In other words, a solution to the following system of equations:
Ri = x ∈ X : d(x ,Pi) ≤ d(x ,⋃j 6=i
Rj).
Definition
A double zone diagram is a fixed point of Dom2, i.e.,
R = Dom2(R).
Daniel Reem (ICMC) Implicit computational geometry June 2015 20 / 41

Formal definitions: zone and double zone diagrams
Definition
A zone diagram is a fixed point of Dom, i.e.,
R = Dom(R)
In other words, a solution to the following system of equations:
Ri = x ∈ X : d(x ,Pi) ≤ d(x ,⋃j 6=i
Rj).
Definition
A double zone diagram is a fixed point of Dom2, i.e.,
R = Dom2(R).
Daniel Reem (ICMC) Implicit computational geometry June 2015 20 / 41

Formal definitions: zone and double zone diagrams
Definition
A zone diagram is a fixed point of Dom, i.e.,
R = Dom(R)
In other words, a solution to the following system of equations:
Ri = x ∈ X : d(x ,Pi) ≤ d(x ,⋃j 6=i
Rj).
Definition
A double zone diagram is a fixed point of Dom2, i.e.,
R = Dom2(R).
Daniel Reem (ICMC) Implicit computational geometry June 2015 20 / 41
Main Results: trisectors
Theorem
(Asano-Matousek-Tokuyama 2007a) There exists a unique 3-sector oftwo point sites in the euclidean plane.
Daniel Reem (ICMC) Implicit computational geometry June 2015 21 / 41

Main Results: trisectors
Theorem
(Asano-Matousek-Tokuyama 2007a) There exists a unique 3-sector oftwo point sites in the euclidean plane.
Daniel Reem (ICMC) Implicit computational geometry June 2015 21 / 41

Main Results: k-sectors
Theorem
(Imai-Kawamura-Matousek-Reem-Tokuyama 2010)
For all k ≥ 2 there exists a k-sectors of disjoint closed sites in anyproper geodesic metric spaces. Non-existence can hold otherwise.
Uniqueness does not always hold even for point sites in (R2, `1).
Reminder:
Geodesic: for all x , y ∈ X there is a geodesic connecting them, i.e.,isometry γ : [0, d(x , y)]→ X satisfying γ(0) = x , γ(d(x , y)) = y .
Proper: closed balls are compact
Daniel Reem (ICMC) Implicit computational geometry June 2015 22 / 41
Main Results: k-sectors
Theorem
(Imai-Kawamura-Matousek-Reem-Tokuyama 2010)
For all k ≥ 2 there exists a k-sectors of disjoint closed sites in anyproper geodesic metric spaces.
Non-existence can hold otherwise.
Uniqueness does not always hold even for point sites in (R2, `1).
Reminder:
Geodesic: for all x , y ∈ X there is a geodesic connecting them, i.e.,isometry γ : [0, d(x , y)]→ X satisfying γ(0) = x , γ(d(x , y)) = y .
Proper: closed balls are compact
Daniel Reem (ICMC) Implicit computational geometry June 2015 22 / 41

Main Results: k-sectors
Theorem
(Imai-Kawamura-Matousek-Reem-Tokuyama 2010)
For all k ≥ 2 there exists a k-sectors of disjoint closed sites in anyproper geodesic metric spaces. Non-existence can hold otherwise.
Uniqueness does not always hold even for point sites in (R2, `1).
Reminder:
Geodesic: for all x , y ∈ X there is a geodesic connecting them, i.e.,isometry γ : [0, d(x , y)]→ X satisfying γ(0) = x , γ(d(x , y)) = y .
Proper: closed balls are compact
Daniel Reem (ICMC) Implicit computational geometry June 2015 22 / 41
Main Results: k-sectors
Theorem
(Imai-Kawamura-Matousek-Reem-Tokuyama 2010)
For all k ≥ 2 there exists a k-sectors of disjoint closed sites in anyproper geodesic metric spaces. Non-existence can hold otherwise.
Uniqueness does not always hold even for point sites in (R2, `1).
Reminder:
Geodesic: for all x , y ∈ X there is a geodesic connecting them, i.e.,isometry γ : [0, d(x , y)]→ X satisfying γ(0) = x , γ(d(x , y)) = y .
Proper: closed balls are compact
Daniel Reem (ICMC) Implicit computational geometry June 2015 22 / 41

Main Results: k-sectors
Theorem
(Imai-Kawamura-Matousek-Reem-Tokuyama 2010)
For all k ≥ 2 there exists a k-sectors of disjoint closed sites in anyproper geodesic metric spaces. Non-existence can hold otherwise.
Uniqueness does not always hold even for point sites in (R2, `1).
Reminder:
Geodesic:
for all x , y ∈ X there is a geodesic connecting them, i.e.,isometry γ : [0, d(x , y)]→ X satisfying γ(0) = x , γ(d(x , y)) = y .
Proper: closed balls are compact
Daniel Reem (ICMC) Implicit computational geometry June 2015 22 / 41

Main Results: k-sectors
Theorem
(Imai-Kawamura-Matousek-Reem-Tokuyama 2010)
For all k ≥ 2 there exists a k-sectors of disjoint closed sites in anyproper geodesic metric spaces. Non-existence can hold otherwise.
Uniqueness does not always hold even for point sites in (R2, `1).
Reminder:
Geodesic: for all x , y ∈ X there is a geodesic connecting them,
i.e.,isometry γ : [0, d(x , y)]→ X satisfying γ(0) = x , γ(d(x , y)) = y .
Proper: closed balls are compact
Daniel Reem (ICMC) Implicit computational geometry June 2015 22 / 41

Main Results: k-sectors
Theorem
(Imai-Kawamura-Matousek-Reem-Tokuyama 2010)
For all k ≥ 2 there exists a k-sectors of disjoint closed sites in anyproper geodesic metric spaces. Non-existence can hold otherwise.
Uniqueness does not always hold even for point sites in (R2, `1).
Reminder:
Geodesic: for all x , y ∈ X there is a geodesic connecting them, i.e.,isometry γ : [0, d(x , y)]→ X satisfying γ(0) = x , γ(d(x , y)) = y .
Proper: closed balls are compact
Daniel Reem (ICMC) Implicit computational geometry June 2015 22 / 41
Main Results: k-sectors
Theorem
(Imai-Kawamura-Matousek-Reem-Tokuyama 2010)
For all k ≥ 2 there exists a k-sectors of disjoint closed sites in anyproper geodesic metric spaces. Non-existence can hold otherwise.
Uniqueness does not always hold even for point sites in (R2, `1).
Reminder:
Geodesic: for all x , y ∈ X there is a geodesic connecting them, i.e.,isometry γ : [0, d(x , y)]→ X satisfying γ(0) = x , γ(d(x , y)) = y .
Proper: closed balls are compact
Daniel Reem (ICMC) Implicit computational geometry June 2015 22 / 41

Main results: zone diagrams
Theorem
(Asano-Matousek-Tokuyama 2007b) The exists a unique zone diagramof finitely many point sites in the euclidean plane.
Daniel Reem (ICMC) Implicit computational geometry June 2015 23 / 41

Main results: zone diagrams
Theorem
(Asano-Matousek-Tokuyama 2007b) The exists a unique zone diagramof finitely many point sites in the euclidean plane.
Daniel Reem (ICMC) Implicit computational geometry June 2015 23 / 41

Main results: zone diagrams (Cont.)
Theorem
(Reem-Reich 2009) There exists a zone diagram of two arbitrary sites inm-spaces.
What are m-space? Significant generalization of metric spaces:
Definition
X 6= ∅
d : X 2 → [−∞,∞]
d(x , x) ≤ d(x , y) for all x , y ∈ X
Arbitrary sites: can intersect, be exotic (e.g., fractals), etc.
Daniel Reem (ICMC) Implicit computational geometry June 2015 24 / 41
Main results: zone diagrams (Cont.)
Theorem
(Reem-Reich 2009) There exists a zone diagram of two arbitrary sites inm-spaces.
What are m-space? Significant generalization of metric spaces:
Definition
X 6= ∅
d : X 2 → [−∞,∞]
d(x , x) ≤ d(x , y) for all x , y ∈ X
Arbitrary sites: can intersect, be exotic (e.g., fractals), etc.
Daniel Reem (ICMC) Implicit computational geometry June 2015 24 / 41

Main results: zone diagrams (Cont.)
Theorem
(Reem-Reich 2009) There exists a zone diagram of two arbitrary sites inm-spaces.
What are m-space?
Significant generalization of metric spaces:
Definition
X 6= ∅
d : X 2 → [−∞,∞]
d(x , x) ≤ d(x , y) for all x , y ∈ X
Arbitrary sites: can intersect, be exotic (e.g., fractals), etc.
Daniel Reem (ICMC) Implicit computational geometry June 2015 24 / 41

Main results: zone diagrams (Cont.)
Theorem
(Reem-Reich 2009) There exists a zone diagram of two arbitrary sites inm-spaces.
What are m-space? Significant generalization of metric spaces:
Definition
X 6= ∅
d : X 2 → [−∞,∞]
d(x , x) ≤ d(x , y) for all x , y ∈ X
Arbitrary sites: can intersect, be exotic (e.g., fractals), etc.
Daniel Reem (ICMC) Implicit computational geometry June 2015 24 / 41

Main results: zone diagrams (Cont.)
Theorem
(Reem-Reich 2009) There exists a zone diagram of two arbitrary sites inm-spaces.
What are m-space? Significant generalization of metric spaces:
Definition
X 6= ∅
d : X 2 → [−∞,∞]
d(x , x) ≤ d(x , y) for all x , y ∈ X
Arbitrary sites: can intersect, be exotic (e.g., fractals), etc.
Daniel Reem (ICMC) Implicit computational geometry June 2015 24 / 41
Main results: zone diagrams (Cont.)
Theorem
(Reem-Reich 2009) There exists a zone diagram of two arbitrary sites inm-spaces.
What are m-space? Significant generalization of metric spaces:
Definition
X 6= ∅
d : X 2 → [−∞,∞]
d(x , x) ≤ d(x , y) for all x , y ∈ X
Arbitrary sites: can intersect, be exotic (e.g., fractals), etc.
Daniel Reem (ICMC) Implicit computational geometry June 2015 24 / 41

Main results: zone diagrams (Cont.)
Theorem
(Reem-Reich 2009) There exists a zone diagram of two arbitrary sites inm-spaces.
What are m-space? Significant generalization of metric spaces:
Definition
X 6= ∅
d : X 2 → [−∞,∞]
d(x , x) ≤ d(x , y) for all x , y ∈ X
Arbitrary sites: can intersect, be exotic (e.g., fractals), etc.
Daniel Reem (ICMC) Implicit computational geometry June 2015 24 / 41
Main results: zone diagrams (Cont.)
Theorem
(Reem-Reich 2009) There exists a zone diagram of two arbitrary sites inm-spaces.
What are m-space? Significant generalization of metric spaces:
Definition
X 6= ∅
d : X 2 → [−∞,∞]
d(x , x) ≤ d(x , y) for all x , y ∈ X
Arbitrary sites:
can intersect, be exotic (e.g., fractals), etc.
Daniel Reem (ICMC) Implicit computational geometry June 2015 24 / 41
Main results: zone diagrams (Cont.)
Theorem
(Reem-Reich 2009) There exists a zone diagram of two arbitrary sites inm-spaces.
What are m-space? Significant generalization of metric spaces:
Definition
X 6= ∅
d : X 2 → [−∞,∞]
d(x , x) ≤ d(x , y) for all x , y ∈ X
Arbitrary sites: can intersect, be exotic (e.g., fractals), etc.
Daniel Reem (ICMC) Implicit computational geometry June 2015 24 / 41

Main results: zone diagrams (Cont.)
Reminder: a normed space X is called
Smooth: unique supporting hyperplane at each x ∈ SX
Strictly convex: no line segments in SX
Uniformly convex: given ε ∈ (0, 2), if ‖x − y‖ ≥ ε and x , y ∈ SX ,then 0.5(x + y) is uniformly inside the unit ball.
Example: `p, Lp(Ω) spaces, 1 < p <∞.
Theorem
(Kawamura-Matousek-Tokuyama 2012) There exists a unique zonediagram of finitely many positively separated closed sites in a finitedimensional strictly smooth and strictly convex normed space; it coincideswith the unique DZD;examples of non-uniqueness exist otherwise*.
Daniel Reem (ICMC) Implicit computational geometry June 2015 25 / 41
Main results: zone diagrams (Cont.)
Reminder: a normed space X is called
Smooth: unique supporting hyperplane at each x ∈ SX
Strictly convex: no line segments in SX
Uniformly convex: given ε ∈ (0, 2), if ‖x − y‖ ≥ ε and x , y ∈ SX ,then 0.5(x + y) is uniformly inside the unit ball.
Example: `p, Lp(Ω) spaces, 1 < p <∞.
Theorem
(Kawamura-Matousek-Tokuyama 2012) There exists a unique zonediagram of finitely many positively separated closed sites in a finitedimensional strictly smooth and strictly convex normed space; it coincideswith the unique DZD;examples of non-uniqueness exist otherwise*.
Daniel Reem (ICMC) Implicit computational geometry June 2015 25 / 41
Main results: zone diagrams (Cont.)
Reminder: a normed space X is called
Smooth: unique supporting hyperplane at each x ∈ SX
Strictly convex: no line segments in SX
Uniformly convex: given ε ∈ (0, 2), if ‖x − y‖ ≥ ε and x , y ∈ SX ,then 0.5(x + y) is uniformly inside the unit ball.
Example: `p, Lp(Ω) spaces, 1 < p <∞.
Theorem
(Kawamura-Matousek-Tokuyama 2012) There exists a unique zonediagram of finitely many positively separated closed sites in a finitedimensional strictly smooth and strictly convex normed space; it coincideswith the unique DZD;examples of non-uniqueness exist otherwise*.
Daniel Reem (ICMC) Implicit computational geometry June 2015 25 / 41
Main results: zone diagrams (Cont.)
Reminder: a normed space X is called
Smooth: unique supporting hyperplane at each x ∈ SX
Strictly convex: no line segments in SX
Uniformly convex: given ε ∈ (0, 2), if ‖x − y‖ ≥ ε and x , y ∈ SX ,then 0.5(x + y) is uniformly inside the unit ball.
Example: `p, Lp(Ω) spaces, 1 < p <∞.
Theorem
(Kawamura-Matousek-Tokuyama 2012) There exists a unique zonediagram of finitely many positively separated closed sites in a finitedimensional strictly smooth and strictly convex normed space; it coincideswith the unique DZD;examples of non-uniqueness exist otherwise*.
Daniel Reem (ICMC) Implicit computational geometry June 2015 25 / 41
Main results: zone diagrams (Cont.)
Reminder: a normed space X is called
Smooth: unique supporting hyperplane at each x ∈ SX
Strictly convex: no line segments in SX
Uniformly convex: given ε ∈ (0, 2), if ‖x − y‖ ≥ ε and x , y ∈ SX ,then 0.5(x + y) is uniformly inside the unit ball.
Example: `p, Lp(Ω) spaces, 1 < p <∞.
Theorem
(Kawamura-Matousek-Tokuyama 2012) There exists a unique zonediagram of finitely many positively separated closed sites in a finitedimensional strictly smooth and strictly convex normed space; it coincideswith the unique DZD;examples of non-uniqueness exist otherwise*.
Daniel Reem (ICMC) Implicit computational geometry June 2015 25 / 41
Main results: zone diagrams (Cont.)
Reminder: a normed space X is called
Smooth: unique supporting hyperplane at each x ∈ SX
Strictly convex: no line segments in SX
Uniformly convex: given ε ∈ (0, 2), if ‖x − y‖ ≥ ε and x , y ∈ SX ,then 0.5(x + y) is uniformly inside the unit ball.
Example: `p, Lp(Ω) spaces, 1 < p <∞.
Theorem
(Kawamura-Matousek-Tokuyama 2012) There exists a unique zonediagram of finitely many positively separated closed sites in a finitedimensional strictly smooth and strictly convex normed space; it coincideswith the unique DZD;examples of non-uniqueness exist otherwise*.
Daniel Reem (ICMC) Implicit computational geometry June 2015 25 / 41
Main results: zone diagrams (Cont.)
Reminder: a normed space X is called
Smooth: unique supporting hyperplane at each x ∈ SX
Strictly convex: no line segments in SX
Uniformly convex: given ε ∈ (0, 2), if ‖x − y‖ ≥ ε and x , y ∈ SX ,then 0.5(x + y) is uniformly inside the unit ball.
Example: `p, Lp(Ω) spaces, 1 < p <∞.
Theorem
(Kawamura-Matousek-Tokuyama 2012) There exists a unique zonediagram of finitely many positively separated closed sites in a finitedimensional strictly smooth and strictly convex normed space; it coincideswith the unique DZD;
examples of non-uniqueness exist otherwise*.
Daniel Reem (ICMC) Implicit computational geometry June 2015 25 / 41
Main results: zone diagrams (Cont.)
Reminder: a normed space X is called
Smooth: unique supporting hyperplane at each x ∈ SX
Strictly convex: no line segments in SX
Uniformly convex: given ε ∈ (0, 2), if ‖x − y‖ ≥ ε and x , y ∈ SX ,then 0.5(x + y) is uniformly inside the unit ball.
Example: `p, Lp(Ω) spaces, 1 < p <∞.
Theorem
(Kawamura-Matousek-Tokuyama 2012) There exists a unique zonediagram of finitely many positively separated closed sites in a finitedimensional strictly smooth and strictly convex normed space; it coincideswith the unique DZD;examples of non-uniqueness exist otherwise*.
Daniel Reem (ICMC) Implicit computational geometry June 2015 25 / 41

Main results: zone diagrams (Cont.)
Theorem
(Kopecka-Reem-Reich 2012) There exists a zone diagram of finitelymany disjoint compact sites in a compact and convex subset X of auniformly convex normed space, assuming X satisfies a certain geometricproperty (e.g., X is a ball).
Daniel Reem (ICMC) Implicit computational geometry June 2015 26 / 41

Main results: zone diagrams (Cont.)
Theorem
(Kopecka-Reem-Reich 2012) There exists a zone diagram of finitelymany disjoint compact sites in a compact and convex subset X of auniformly convex normed space, assuming X satisfies a certain geometricproperty (e.g., X is a ball).
Daniel Reem (ICMC) Implicit computational geometry June 2015 26 / 41
Main results: double zone diagrams
Theorem
(Reem-Reich 2009) There exists a double zone diagram of arbitrarymany (possibly infinitely many) sites of arbitrary form in m-spaces.Moreover, there exist a least and a greatest DZD. Uniqueness doesn’tnecessarily hold.
Daniel Reem (ICMC) Implicit computational geometry June 2015 27 / 41

Main results: double zone diagrams
Theorem
(Reem-Reich 2009) There exists a double zone diagram of arbitrarymany (possibly infinitely many) sites of arbitrary form in m-spaces.
Moreover, there exist a least and a greatest DZD. Uniqueness doesn’tnecessarily hold.
Daniel Reem (ICMC) Implicit computational geometry June 2015 27 / 41

Main results: double zone diagrams
Theorem
(Reem-Reich 2009) There exists a double zone diagram of arbitrarymany (possibly infinitely many) sites of arbitrary form in m-spaces.Moreover, there exist a least and a greatest DZD.
Uniqueness doesn’tnecessarily hold.
Daniel Reem (ICMC) Implicit computational geometry June 2015 27 / 41
Main results: double zone diagrams
Theorem
(Reem-Reich 2009) There exists a double zone diagram of arbitrarymany (possibly infinitely many) sites of arbitrary form in m-spaces.Moreover, there exist a least and a greatest DZD. Uniqueness doesn’tnecessarily hold.
Daniel Reem (ICMC) Implicit computational geometry June 2015 27 / 41
Main results: computation
Asano-Matousek-Tokuyama 2007a,b: Iterative approximationalgorithm for trisector and zone diagrams of point sites in theEuclidean plane
Imai-Kawamura-Matousek-Reem-Tokuyama 2010: approximationalg for k-sectors of disjoint closed sites in finite dimensional strictlyconvex normed spaces.
Reem 2012: approximation alg for double zone diagrams in geodesicmetric spaces having a certain property (in particular: strictly convexnormed spaces and Euclidean spheres). Hence computing ZD whenuniqueness holds (e.g., in the Euclidean case).
Daniel Reem (ICMC) Implicit computational geometry June 2015 28 / 41
Main results: computation
Asano-Matousek-Tokuyama 2007a,b:
Iterative approximationalgorithm for trisector and zone diagrams of point sites in theEuclidean plane
Imai-Kawamura-Matousek-Reem-Tokuyama 2010: approximationalg for k-sectors of disjoint closed sites in finite dimensional strictlyconvex normed spaces.
Reem 2012: approximation alg for double zone diagrams in geodesicmetric spaces having a certain property (in particular: strictly convexnormed spaces and Euclidean spheres). Hence computing ZD whenuniqueness holds (e.g., in the Euclidean case).
Daniel Reem (ICMC) Implicit computational geometry June 2015 28 / 41
Main results: computation
Asano-Matousek-Tokuyama 2007a,b: Iterative approximationalgorithm for trisector and zone diagrams of point sites in theEuclidean plane
Imai-Kawamura-Matousek-Reem-Tokuyama 2010: approximationalg for k-sectors of disjoint closed sites in finite dimensional strictlyconvex normed spaces.
Reem 2012: approximation alg for double zone diagrams in geodesicmetric spaces having a certain property (in particular: strictly convexnormed spaces and Euclidean spheres). Hence computing ZD whenuniqueness holds (e.g., in the Euclidean case).
Daniel Reem (ICMC) Implicit computational geometry June 2015 28 / 41

Main results: computation
Asano-Matousek-Tokuyama 2007a,b: Iterative approximationalgorithm for trisector and zone diagrams of point sites in theEuclidean plane
Imai-Kawamura-Matousek-Reem-Tokuyama 2010:
approximationalg for k-sectors of disjoint closed sites in finite dimensional strictlyconvex normed spaces.
Reem 2012: approximation alg for double zone diagrams in geodesicmetric spaces having a certain property (in particular: strictly convexnormed spaces and Euclidean spheres). Hence computing ZD whenuniqueness holds (e.g., in the Euclidean case).
Daniel Reem (ICMC) Implicit computational geometry June 2015 28 / 41

Main results: computation
Asano-Matousek-Tokuyama 2007a,b: Iterative approximationalgorithm for trisector and zone diagrams of point sites in theEuclidean plane
Imai-Kawamura-Matousek-Reem-Tokuyama 2010: approximationalg for k-sectors of disjoint closed sites in finite dimensional strictlyconvex normed spaces.
Reem 2012: approximation alg for double zone diagrams in geodesicmetric spaces having a certain property (in particular: strictly convexnormed spaces and Euclidean spheres). Hence computing ZD whenuniqueness holds (e.g., in the Euclidean case).
Daniel Reem (ICMC) Implicit computational geometry June 2015 28 / 41
Main results: computation
Asano-Matousek-Tokuyama 2007a,b: Iterative approximationalgorithm for trisector and zone diagrams of point sites in theEuclidean plane
Imai-Kawamura-Matousek-Reem-Tokuyama 2010: approximationalg for k-sectors of disjoint closed sites in finite dimensional strictlyconvex normed spaces.
Reem 2012:
approximation alg for double zone diagrams in geodesicmetric spaces having a certain property (in particular: strictly convexnormed spaces and Euclidean spheres). Hence computing ZD whenuniqueness holds (e.g., in the Euclidean case).
Daniel Reem (ICMC) Implicit computational geometry June 2015 28 / 41

Main results: computation
Asano-Matousek-Tokuyama 2007a,b: Iterative approximationalgorithm for trisector and zone diagrams of point sites in theEuclidean plane
Imai-Kawamura-Matousek-Reem-Tokuyama 2010: approximationalg for k-sectors of disjoint closed sites in finite dimensional strictlyconvex normed spaces.
Reem 2012: approximation alg for double zone diagrams in geodesicmetric spaces having a certain property (in particular: strictly convexnormed spaces and Euclidean spheres).
Hence computing ZD whenuniqueness holds (e.g., in the Euclidean case).
Daniel Reem (ICMC) Implicit computational geometry June 2015 28 / 41
Main results: computation
Asano-Matousek-Tokuyama 2007a,b: Iterative approximationalgorithm for trisector and zone diagrams of point sites in theEuclidean plane
Imai-Kawamura-Matousek-Reem-Tokuyama 2010: approximationalg for k-sectors of disjoint closed sites in finite dimensional strictlyconvex normed spaces.
Reem 2012: approximation alg for double zone diagrams in geodesicmetric spaces having a certain property (in particular: strictly convexnormed spaces and Euclidean spheres). Hence computing ZD whenuniqueness holds (e.g., in the Euclidean case).
Daniel Reem (ICMC) Implicit computational geometry June 2015 28 / 41

Properties
Monterde-Ongay, 2014: The trisector of two point sites in 2DEuclidean plane is transcendental (corollary: non-piecewise algebraic)
Reem 2014: a neutral region exists in a wide class of cases, but notalways: the space is geodesic, the sites are positively separated,R ⊆ Dom(R) (territory diagrams) or R ⊆ Dom2(R) (double territorydiagram). Counterexamples exist otherwise even in simple settings.
Daniel Reem (ICMC) Implicit computational geometry June 2015 29 / 41
Properties
Monterde-Ongay, 2014:
The trisector of two point sites in 2DEuclidean plane is transcendental (corollary: non-piecewise algebraic)
Reem 2014: a neutral region exists in a wide class of cases, but notalways: the space is geodesic, the sites are positively separated,R ⊆ Dom(R) (territory diagrams) or R ⊆ Dom2(R) (double territorydiagram). Counterexamples exist otherwise even in simple settings.
Daniel Reem (ICMC) Implicit computational geometry June 2015 29 / 41

Properties
Monterde-Ongay, 2014: The trisector of two point sites in 2DEuclidean plane is transcendental
(corollary: non-piecewise algebraic)
Reem 2014: a neutral region exists in a wide class of cases, but notalways: the space is geodesic, the sites are positively separated,R ⊆ Dom(R) (territory diagrams) or R ⊆ Dom2(R) (double territorydiagram). Counterexamples exist otherwise even in simple settings.
Daniel Reem (ICMC) Implicit computational geometry June 2015 29 / 41
Properties
Monterde-Ongay, 2014: The trisector of two point sites in 2DEuclidean plane is transcendental (corollary: non-piecewise algebraic)
Reem 2014: a neutral region exists in a wide class of cases, but notalways: the space is geodesic, the sites are positively separated,R ⊆ Dom(R) (territory diagrams) or R ⊆ Dom2(R) (double territorydiagram). Counterexamples exist otherwise even in simple settings.
Daniel Reem (ICMC) Implicit computational geometry June 2015 29 / 41
Properties
Monterde-Ongay, 2014: The trisector of two point sites in 2DEuclidean plane is transcendental (corollary: non-piecewise algebraic)
Reem 2014:
a neutral region exists in a wide class of cases, but notalways: the space is geodesic, the sites are positively separated,R ⊆ Dom(R) (territory diagrams) or R ⊆ Dom2(R) (double territorydiagram). Counterexamples exist otherwise even in simple settings.
Daniel Reem (ICMC) Implicit computational geometry June 2015 29 / 41

Properties
Monterde-Ongay, 2014: The trisector of two point sites in 2DEuclidean plane is transcendental (corollary: non-piecewise algebraic)
Reem 2014: a neutral region exists in a wide class of cases, but notalways: the space is geodesic, the sites are positively separated,R ⊆ Dom(R) (territory diagrams) or R ⊆ Dom2(R) (double territorydiagram). Counterexamples exist otherwise even in simple settings.
Daniel Reem (ICMC) Implicit computational geometry June 2015 29 / 41

Byproduct: property of Voronoi cells
Assume: (X , d) is geodesic metric space having the geodesic inclusionproperty (e.g., strictly convex normed spaces, Euclidean sphere).
P,Q disjoint sites such that the distance to them is attained.
Then (Reem 2012): bisect(P,Q) is not “fat”: it coincides withboundary of Voronoi cell of P w.r.t. Q, i.e., boundary of
x ∈ X : d(x ,P) ≤ d(x ,Q).
Counterexamples exist otherwise.
Generalizes Wilker 1975 (Euclidean) and Imai et al. 2010 (finitedim strictly convex normed spaces).
Daniel Reem (ICMC) Implicit computational geometry June 2015 30 / 41
Byproduct: property of Voronoi cells
Assume: (X , d) is geodesic metric space having the geodesic inclusionproperty (e.g., strictly convex normed spaces, Euclidean sphere).
P,Q disjoint sites such that the distance to them is attained.
Then (Reem 2012): bisect(P,Q) is not “fat”: it coincides withboundary of Voronoi cell of P w.r.t. Q, i.e., boundary of
x ∈ X : d(x ,P) ≤ d(x ,Q).
Counterexamples exist otherwise.
Generalizes Wilker 1975 (Euclidean) and Imai et al. 2010 (finitedim strictly convex normed spaces).
Daniel Reem (ICMC) Implicit computational geometry June 2015 30 / 41
Byproduct: property of Voronoi cells
Assume: (X , d) is geodesic metric space having the geodesic inclusionproperty (e.g., strictly convex normed spaces, Euclidean sphere).
P,Q disjoint sites such that the distance to them is attained.
Then (Reem 2012): bisect(P,Q) is not “fat”: it coincides withboundary of Voronoi cell of P w.r.t. Q, i.e., boundary of
x ∈ X : d(x ,P) ≤ d(x ,Q).
Counterexamples exist otherwise.
Generalizes Wilker 1975 (Euclidean) and Imai et al. 2010 (finitedim strictly convex normed spaces).
Daniel Reem (ICMC) Implicit computational geometry June 2015 30 / 41
Byproduct: property of Voronoi cells
Assume: (X , d) is geodesic metric space having the geodesic inclusionproperty (e.g., strictly convex normed spaces, Euclidean sphere).
P,Q disjoint sites such that the distance to them is attained.
Then (Reem 2012): bisect(P,Q) is not “fat”: it coincides withboundary of Voronoi cell of P w.r.t. Q, i.e., boundary of
x ∈ X : d(x ,P) ≤ d(x ,Q).
Counterexamples exist otherwise.
Generalizes Wilker 1975 (Euclidean) and Imai et al. 2010 (finitedim strictly convex normed spaces).
Daniel Reem (ICMC) Implicit computational geometry June 2015 30 / 41

Byproduct: property of Voronoi cells
Assume: (X , d) is geodesic metric space having the geodesic inclusionproperty (e.g., strictly convex normed spaces, Euclidean sphere).
P,Q disjoint sites such that the distance to them is attained.
Then (Reem 2012): bisect(P,Q) is not “fat”: it coincides withboundary of Voronoi cell of P w.r.t. Q, i.e., boundary of
x ∈ X : d(x ,P) ≤ d(x ,Q).
Counterexamples exist otherwise.
Generalizes Wilker 1975 (Euclidean) and Imai et al. 2010 (finitedim strictly convex normed spaces).
Daniel Reem (ICMC) Implicit computational geometry June 2015 30 / 41

Byproduct: property of Voronoi cells
Assume: (X , d) is geodesic metric space having the geodesic inclusionproperty (e.g., strictly convex normed spaces, Euclidean sphere).
P,Q disjoint sites such that the distance to them is attained.
Then (Reem 2012): bisect(P,Q) is not “fat”: it coincides withboundary of Voronoi cell of P w.r.t. Q, i.e., boundary of
x ∈ X : d(x ,P) ≤ d(x ,Q).
Counterexamples exist otherwise.
Generalizes Wilker 1975 (Euclidean) and Imai et al. 2010 (finitedim strictly convex normed spaces).
Daniel Reem (ICMC) Implicit computational geometry June 2015 30 / 41
Byproduct 2: property of Voronoi cells
Assume:
X is convex and bounded in a uniformly convex space
P, Q are sites in X
P is a point, d(P,Q) > 0,
Then (Kopecka-Reem-Reich 2012): the Voronoi cell of P w.r.t Q ishomeomorphic to a convex set.
Daniel Reem (ICMC) Implicit computational geometry June 2015 31 / 41
Byproduct 2: property of Voronoi cells
Assume:
X is convex and bounded in a uniformly convex space
P, Q are sites in X
P is a point, d(P,Q) > 0,
Then (Kopecka-Reem-Reich 2012): the Voronoi cell of P w.r.t Q ishomeomorphic to a convex set.
Daniel Reem (ICMC) Implicit computational geometry June 2015 31 / 41
Byproduct 2: property of Voronoi cells
Assume:
X is convex and bounded in a uniformly convex space
P, Q are sites in X
P is a point, d(P,Q) > 0,
Then (Kopecka-Reem-Reich 2012): the Voronoi cell of P w.r.t Q ishomeomorphic to a convex set.
Daniel Reem (ICMC) Implicit computational geometry June 2015 31 / 41

Byproduct 2: property of Voronoi cells
Assume:
X is convex and bounded in a uniformly convex space
P, Q are sites in X
P is a point, d(P,Q) > 0,
Then (Kopecka-Reem-Reich 2012): the Voronoi cell of P w.r.t Q ishomeomorphic to a convex set.
Daniel Reem (ICMC) Implicit computational geometry June 2015 31 / 41
Byproduct 2: property of Voronoi cells
Assume:
X is convex and bounded in a uniformly convex space
P, Q are sites in X
P is a point, d(P,Q) > 0,
Then (Kopecka-Reem-Reich 2012): the Voronoi cell of P w.r.t Q ishomeomorphic to a convex set.
Daniel Reem (ICMC) Implicit computational geometry June 2015 31 / 41
Byproduct 2: property of Voronoi cells
Assume:
X is convex and bounded in a uniformly convex space
P, Q are sites in X
P is a point, d(P,Q) > 0,
Then (Kopecka-Reem-Reich 2012):
the Voronoi cell of P w.r.t Q ishomeomorphic to a convex set.
Daniel Reem (ICMC) Implicit computational geometry June 2015 31 / 41
Byproduct 2: property of Voronoi cells
Assume:
X is convex and bounded in a uniformly convex space
P, Q are sites in X
P is a point, d(P,Q) > 0,
Then (Kopecka-Reem-Reich 2012): the Voronoi cell of P w.r.t Q ishomeomorphic to a convex set.
Daniel Reem (ICMC) Implicit computational geometry June 2015 31 / 41
Example and a counterexample (to both byproducts)
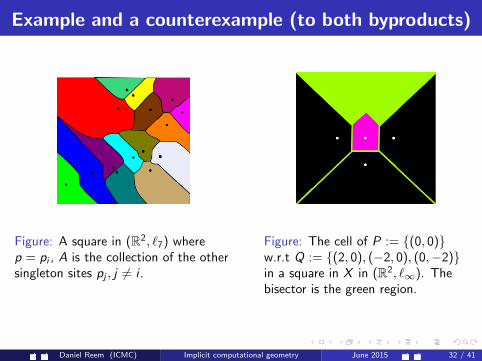
Figure: A square in (R2, `7) wherep = pi , A is the collection of the othersingleton sites pj , j 6= i .
Figure: The cell of P := (0, 0)w.r.t Q := (2, 0), (−2, 0), (0,−2)in a square in X in (R2, `∞). Thebisector is the green region.
Daniel Reem (ICMC) Implicit computational geometry June 2015 32 / 41
Example and a counterexample (to both byproducts)
Figure: A square in (R2, `7) wherep = pi , A is the collection of the othersingleton sites pj , j 6= i .
Figure: The cell of P := (0, 0)w.r.t Q := (2, 0), (−2, 0), (0,−2)in a square in X in (R2, `∞). Thebisector is the green region.
Daniel Reem (ICMC) Implicit computational geometry June 2015 32 / 41

Additional results
Asano-Kirkpatrick 2006: Parametric family of trisectors inapproximations of the Euclidean plane
Asano-Matousek-Tokuyama 2007a: functional and differentialproperties of trisectors
Asano-Matousek-Tokuyama 2007b, Reem 2014: interpretation ofZD as an equilibrium between mutually hostile opponents
Reem-Reich 2009: sufficient conditions for uniqueness of ZD
de Biassi-Kalantari-Kalantari 2011: territory diagrams
Fraser-He-Kawamura-LopezOrtiz-Munro-Nicholson 2014:Uniqueness of 4-sector of point sites in the Euclidean plane
More results
Daniel Reem (ICMC) Implicit computational geometry June 2015 33 / 41

Additional results
Asano-Kirkpatrick 2006: Parametric family of trisectors inapproximations of the Euclidean plane
Asano-Matousek-Tokuyama 2007a: functional and differentialproperties of trisectors
Asano-Matousek-Tokuyama 2007b, Reem 2014: interpretation ofZD as an equilibrium between mutually hostile opponents
Reem-Reich 2009: sufficient conditions for uniqueness of ZD
de Biassi-Kalantari-Kalantari 2011: territory diagrams
Fraser-He-Kawamura-LopezOrtiz-Munro-Nicholson 2014:Uniqueness of 4-sector of point sites in the Euclidean plane
More results
Daniel Reem (ICMC) Implicit computational geometry June 2015 33 / 41
Additional results
Asano-Kirkpatrick 2006: Parametric family of trisectors inapproximations of the Euclidean plane
Asano-Matousek-Tokuyama 2007a: functional and differentialproperties of trisectors
Asano-Matousek-Tokuyama 2007b, Reem 2014: interpretation ofZD as an equilibrium between mutually hostile opponents
Reem-Reich 2009: sufficient conditions for uniqueness of ZD
de Biassi-Kalantari-Kalantari 2011: territory diagrams
Fraser-He-Kawamura-LopezOrtiz-Munro-Nicholson 2014:Uniqueness of 4-sector of point sites in the Euclidean plane
More results
Daniel Reem (ICMC) Implicit computational geometry June 2015 33 / 41
Additional results
Asano-Kirkpatrick 2006: Parametric family of trisectors inapproximations of the Euclidean plane
Asano-Matousek-Tokuyama 2007a: functional and differentialproperties of trisectors
Asano-Matousek-Tokuyama 2007b, Reem 2014: interpretation ofZD as an equilibrium between mutually hostile opponents
Reem-Reich 2009: sufficient conditions for uniqueness of ZD
de Biassi-Kalantari-Kalantari 2011: territory diagrams
Fraser-He-Kawamura-LopezOrtiz-Munro-Nicholson 2014:Uniqueness of 4-sector of point sites in the Euclidean plane
More results
Daniel Reem (ICMC) Implicit computational geometry June 2015 33 / 41
Additional results
Asano-Kirkpatrick 2006: Parametric family of trisectors inapproximations of the Euclidean plane
Asano-Matousek-Tokuyama 2007a: functional and differentialproperties of trisectors
Asano-Matousek-Tokuyama 2007b, Reem 2014: interpretation ofZD as an equilibrium between mutually hostile opponents
Reem-Reich 2009: sufficient conditions for uniqueness of ZD
de Biassi-Kalantari-Kalantari 2011: territory diagrams
Fraser-He-Kawamura-LopezOrtiz-Munro-Nicholson 2014:Uniqueness of 4-sector of point sites in the Euclidean plane
More results
Daniel Reem (ICMC) Implicit computational geometry June 2015 33 / 41

Additional results
Asano-Kirkpatrick 2006: Parametric family of trisectors inapproximations of the Euclidean plane
Asano-Matousek-Tokuyama 2007a: functional and differentialproperties of trisectors
Asano-Matousek-Tokuyama 2007b, Reem 2014: interpretation ofZD as an equilibrium between mutually hostile opponents
Reem-Reich 2009: sufficient conditions for uniqueness of ZD
de Biassi-Kalantari-Kalantari 2011: territory diagrams
Fraser-He-Kawamura-LopezOrtiz-Munro-Nicholson 2014:Uniqueness of 4-sector of point sites in the Euclidean plane
More results
Daniel Reem (ICMC) Implicit computational geometry June 2015 33 / 41
Additional results
Asano-Kirkpatrick 2006: Parametric family of trisectors inapproximations of the Euclidean plane
Asano-Matousek-Tokuyama 2007a: functional and differentialproperties of trisectors
Asano-Matousek-Tokuyama 2007b, Reem 2014: interpretation ofZD as an equilibrium between mutually hostile opponents
Reem-Reich 2009: sufficient conditions for uniqueness of ZD
de Biassi-Kalantari-Kalantari 2011: territory diagrams
Fraser-He-Kawamura-LopezOrtiz-Munro-Nicholson 2014:Uniqueness of 4-sector of point sites in the Euclidean plane
More results
Daniel Reem (ICMC) Implicit computational geometry June 2015 33 / 41

Additional results
Asano-Kirkpatrick 2006: Parametric family of trisectors inapproximations of the Euclidean plane
Asano-Matousek-Tokuyama 2007a: functional and differentialproperties of trisectors
Asano-Matousek-Tokuyama 2007b, Reem 2014: interpretation ofZD as an equilibrium between mutually hostile opponents
Reem-Reich 2009: sufficient conditions for uniqueness of ZD
de Biassi-Kalantari-Kalantari 2011: territory diagrams
Fraser-He-Kawamura-LopezOrtiz-Munro-Nicholson 2014:Uniqueness of 4-sector of point sites in the Euclidean plane
More results
Daniel Reem (ICMC) Implicit computational geometry June 2015 33 / 41

Proofs: some ideas
Fixed point theorems: Knaster-Tarski (for monotone maps oncomplete lattices), Schauder (continuous maps, compactness,convexity)
To consider a double zone diagram and show that it is a zonediagram
Geometric and topological arguments
Continuity of Voronoi diagrams with respect to small changes of thesites (Reem 2011)
Curtis-Schori theory regarding the Hilbert cube
The byproduct properties mentioned earlier
Daniel Reem (ICMC) Implicit computational geometry June 2015 34 / 41

Proofs: some ideas
Fixed point theorems: Knaster-Tarski (for monotone maps oncomplete lattices), Schauder (continuous maps, compactness,convexity)
To consider a double zone diagram and show that it is a zonediagram
Geometric and topological arguments
Continuity of Voronoi diagrams with respect to small changes of thesites (Reem 2011)
Curtis-Schori theory regarding the Hilbert cube
The byproduct properties mentioned earlier
Daniel Reem (ICMC) Implicit computational geometry June 2015 34 / 41

Proofs: some ideas
Fixed point theorems: Knaster-Tarski (for monotone maps oncomplete lattices), Schauder (continuous maps, compactness,convexity)
To consider a double zone diagram and show that it is a zonediagram
Geometric and topological arguments
Continuity of Voronoi diagrams with respect to small changes of thesites (Reem 2011)
Curtis-Schori theory regarding the Hilbert cube
The byproduct properties mentioned earlier
Daniel Reem (ICMC) Implicit computational geometry June 2015 34 / 41

Proofs: some ideas
Fixed point theorems: Knaster-Tarski (for monotone maps oncomplete lattices), Schauder (continuous maps, compactness,convexity)
To consider a double zone diagram and show that it is a zonediagram
Geometric and topological arguments
Continuity of Voronoi diagrams with respect to small changes of thesites (Reem 2011)
Curtis-Schori theory regarding the Hilbert cube
The byproduct properties mentioned earlier
Daniel Reem (ICMC) Implicit computational geometry June 2015 34 / 41
Proofs: some ideas
Fixed point theorems: Knaster-Tarski (for monotone maps oncomplete lattices), Schauder (continuous maps, compactness,convexity)
To consider a double zone diagram and show that it is a zonediagram
Geometric and topological arguments
Continuity of Voronoi diagrams with respect to small changes of thesites (Reem 2011)
Curtis-Schori theory regarding the Hilbert cube
The byproduct properties mentioned earlier
Daniel Reem (ICMC) Implicit computational geometry June 2015 34 / 41
Proofs: some ideas
Fixed point theorems: Knaster-Tarski (for monotone maps oncomplete lattices), Schauder (continuous maps, compactness,convexity)
To consider a double zone diagram and show that it is a zonediagram
Geometric and topological arguments
Continuity of Voronoi diagrams with respect to small changes of thesites (Reem 2011)
Curtis-Schori theory regarding the Hilbert cube
The byproduct properties mentioned earlier
Daniel Reem (ICMC) Implicit computational geometry June 2015 34 / 41

Proofs: some ideas
Fixed point theorems: Knaster-Tarski (for monotone maps oncomplete lattices), Schauder (continuous maps, compactness,convexity)
To consider a double zone diagram and show that it is a zonediagram
Geometric and topological arguments
Continuity of Voronoi diagrams with respect to small changes of thesites (Reem 2011)
Curtis-Schori theory regarding the Hilbert cube
The byproduct properties mentioned earlier
Daniel Reem (ICMC) Implicit computational geometry June 2015 34 / 41

Computation: some ideas
Dynamics: Iterative inner approximations I (n) and outerapproximations O(n) (Asano-Matousek-Tokuyama 2007b, Reem2012):
P ⊆ Dom2(P) ⊆ Dom4(P) ⊆ . . . ⊆ R ⊆ . . . ⊆ Dom3(P) ⊆ Dom(P).
R is a DZD (hence ZD in the Euclidean case);
(Reem 2012): in many cases approximations converge in Hausdorffdistance to the least and greatest double zone diagrams. When ZDunique (e.g., Euclidean metric), also to a ZD.
Daniel Reem (ICMC) Implicit computational geometry June 2015 35 / 41

Computation: some ideas
Dynamics:
Iterative inner approximations I (n) and outerapproximations O(n) (Asano-Matousek-Tokuyama 2007b, Reem2012):
P ⊆ Dom2(P) ⊆ Dom4(P) ⊆ . . . ⊆ R ⊆ . . . ⊆ Dom3(P) ⊆ Dom(P).
R is a DZD (hence ZD in the Euclidean case);
(Reem 2012): in many cases approximations converge in Hausdorffdistance to the least and greatest double zone diagrams. When ZDunique (e.g., Euclidean metric), also to a ZD.
Daniel Reem (ICMC) Implicit computational geometry June 2015 35 / 41

Computation: some ideas
Dynamics: Iterative inner approximations I (n) and outerapproximations O(n) (Asano-Matousek-Tokuyama 2007b, Reem2012):
P ⊆ Dom2(P) ⊆ Dom4(P) ⊆ . . . ⊆ R ⊆ . . . ⊆ Dom3(P) ⊆ Dom(P).
R is a DZD (hence ZD in the Euclidean case);
(Reem 2012): in many cases approximations converge in Hausdorffdistance to the least and greatest double zone diagrams. When ZDunique (e.g., Euclidean metric), also to a ZD.
Daniel Reem (ICMC) Implicit computational geometry June 2015 35 / 41

Computation: some ideas
Dynamics: Iterative inner approximations I (n) and outerapproximations O(n) (Asano-Matousek-Tokuyama 2007b, Reem2012):
P ⊆ Dom2(P) ⊆ Dom4(P) ⊆ . . . ⊆ R ⊆ . . . ⊆ Dom3(P) ⊆ Dom(P).
R is a DZD (hence ZD in the Euclidean case);
(Reem 2012): in many cases approximations converge in Hausdorffdistance to the least and greatest double zone diagrams. When ZDunique (e.g., Euclidean metric), also to a ZD.
Daniel Reem (ICMC) Implicit computational geometry June 2015 35 / 41

Computation: some ideas
Dynamics: Iterative inner approximations I (n) and outerapproximations O(n) (Asano-Matousek-Tokuyama 2007b, Reem2012):
P ⊆ Dom2(P) ⊆ Dom4(P) ⊆ . . . ⊆ R ⊆ . . . ⊆ Dom3(P) ⊆ Dom(P).
R is a DZD (hence ZD in the Euclidean case);
(Reem 2012): in many cases approximations converge in Hausdorffdistance to the least and greatest double zone diagrams. When ZDunique (e.g., Euclidean metric), also to a ZD.
Daniel Reem (ICMC) Implicit computational geometry June 2015 35 / 41
Computation: some ideas
Dynamics: Iterative inner approximations I (n) and outerapproximations O(n) (Asano-Matousek-Tokuyama 2007b, Reem2012):
P ⊆ Dom2(P) ⊆ Dom4(P) ⊆ . . . ⊆ R ⊆ . . . ⊆ Dom3(P) ⊆ Dom(P).
R is a DZD (hence ZD in the Euclidean case);
(Reem 2012): in many cases approximations converge in Hausdorffdistance to the least and greatest double zone diagrams. When ZDunique (e.g., Euclidean metric), also to a ZD.
Daniel Reem (ICMC) Implicit computational geometry June 2015 35 / 41
Computation: some ideas
Dynamics: Iterative inner approximations I (n) and outerapproximations O(n) (Asano-Matousek-Tokuyama 2007b, Reem2012):
P ⊆ Dom2(P) ⊆ Dom4(P) ⊆ . . . ⊆ R ⊆ . . . ⊆ Dom3(P) ⊆ Dom(P).
R is a DZD (hence ZD in the Euclidean case);
(Reem 2012): in many cases approximations converge in Hausdorffdistance to the least and greatest double zone diagrams.
When ZDunique (e.g., Euclidean metric), also to a ZD.
Daniel Reem (ICMC) Implicit computational geometry June 2015 35 / 41
Computation: some ideas
Dynamics: Iterative inner approximations I (n) and outerapproximations O(n) (Asano-Matousek-Tokuyama 2007b, Reem2012):
P ⊆ Dom2(P) ⊆ Dom4(P) ⊆ . . . ⊆ R ⊆ . . . ⊆ Dom3(P) ⊆ Dom(P).
R is a DZD (hence ZD in the Euclidean case);
(Reem 2012): in many cases approximations converge in Hausdorffdistance to the least and greatest double zone diagrams. When ZDunique (e.g., Euclidean metric), also to a ZD.
Daniel Reem (ICMC) Implicit computational geometry June 2015 35 / 41
Approximation alg: illustration
Figure: Approximation of the zonediagram of Figure 12 using theboundaries of I (2) and O(2) (1600rays in each iteration).
Figure: The setting of Figure 15,but with I (3) and O(3) (1600 rays ineach iteration).
Daniel Reem (ICMC) Implicit computational geometry June 2015 36 / 41

Approximation alg: illustration
Figure: Approximation of the zonediagram of Figure 12 using theboundaries of I (2) and O(2) (1600rays in each iteration).
Figure: The setting of Figure 15,but with I (3) and O(3) (1600 rays ineach iteration).
Daniel Reem (ICMC) Implicit computational geometry June 2015 36 / 41

Computation: some ideas (Cont.)
Challenge
Components of the approximations: Voronoi diagrams of general sites.
How to compute (approximately) such general Voronoi diagrams?
Solutions
Asano-Matousek-Tokuyama 2007b: polygonal approximation (2DEuclidean)
Reem 2012: using a general approximation algorithm for Voronoidiagrams based on ray-shooting (Reem 2009).
Daniel Reem (ICMC) Implicit computational geometry June 2015 37 / 41
Computation: some ideas (Cont.)
Challenge
Components of the approximations: Voronoi diagrams of general sites
.
How to compute (approximately) such general Voronoi diagrams?
Solutions
Asano-Matousek-Tokuyama 2007b: polygonal approximation (2DEuclidean)
Reem 2012: using a general approximation algorithm for Voronoidiagrams based on ray-shooting (Reem 2009).
Daniel Reem (ICMC) Implicit computational geometry June 2015 37 / 41

Computation: some ideas (Cont.)
Challenge
Components of the approximations: Voronoi diagrams of general sites.
How to compute (approximately) such general Voronoi diagrams?
Solutions
Asano-Matousek-Tokuyama 2007b: polygonal approximation (2DEuclidean)
Reem 2012: using a general approximation algorithm for Voronoidiagrams based on ray-shooting (Reem 2009).
Daniel Reem (ICMC) Implicit computational geometry June 2015 37 / 41
Computation: some ideas (Cont.)
Challenge
Components of the approximations: Voronoi diagrams of general sites.
How to compute (approximately) such general Voronoi diagrams?
Solutions
Asano-Matousek-Tokuyama 2007b:
polygonal approximation (2DEuclidean)
Reem 2012: using a general approximation algorithm for Voronoidiagrams based on ray-shooting (Reem 2009).
Daniel Reem (ICMC) Implicit computational geometry June 2015 37 / 41
Computation: some ideas (Cont.)
Challenge
Components of the approximations: Voronoi diagrams of general sites.
How to compute (approximately) such general Voronoi diagrams?
Solutions
Asano-Matousek-Tokuyama 2007b: polygonal approximation (2DEuclidean)
Reem 2012: using a general approximation algorithm for Voronoidiagrams based on ray-shooting (Reem 2009).
Daniel Reem (ICMC) Implicit computational geometry June 2015 37 / 41

Computation: some ideas (Cont.)
Challenge
Components of the approximations: Voronoi diagrams of general sites.
How to compute (approximately) such general Voronoi diagrams?
Solutions
Asano-Matousek-Tokuyama 2007b: polygonal approximation (2DEuclidean)
Reem 2012: using a general approximation algorithm for Voronoidiagrams based on ray-shooting (Reem 2009).
Daniel Reem (ICMC) Implicit computational geometry June 2015 37 / 41

Approximation alg: illustration of ray shooting
Figure: Approximation of the zonediagram of Figure 12 (80 rays ineach iteration).
Figure: Approximation of the zonediagram of Figure 12 (160 rays ineach iteration).
Daniel Reem (ICMC) Implicit computational geometry June 2015 38 / 41
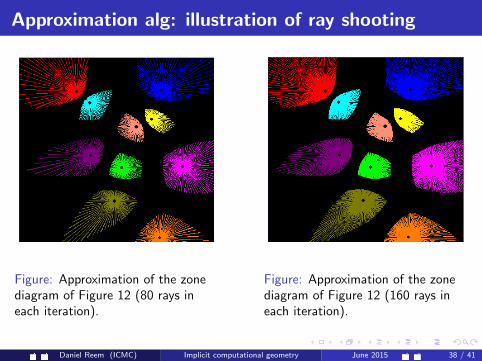
Approximation alg: illustration of ray shooting
Figure: Approximation of the zonediagram of Figure 12 (80 rays ineach iteration).
Figure: Approximation of the zonediagram of Figure 12 (160 rays ineach iteration).
Daniel Reem (ICMC) Implicit computational geometry June 2015 38 / 41

Challenges: many!
Existence of ZD of many sites: Can it be generalized, e.g.,to
manifolds? (Conjecture: Yes!)
non-compact world X ? (Conjecture: Yes!)
non disjoint sites? (Conjecture: Yes!)
arbitrary sites in m-spaces?
Uniqueness of ZD, k-sectors: perhaps holds if the space is:Euclidean? (Conjecture: Yes!)uniformly smooth and uniformly convex? (Conjecture: Yes!)
Riemannian manifolds? (Conjecture: yes, at least to spheres)
Hyperbolic manifolds?
Daniel Reem (ICMC) Implicit computational geometry June 2015 39 / 41

Challenges: many!
Existence of ZD of many sites: Can it be generalized, e.g.,to
manifolds? (Conjecture: Yes!)
non-compact world X ? (Conjecture: Yes!)
non disjoint sites? (Conjecture: Yes!)
arbitrary sites in m-spaces?
Uniqueness of ZD, k-sectors: perhaps holds if the space is:Euclidean? (Conjecture: Yes!)uniformly smooth and uniformly convex? (Conjecture: Yes!)
Riemannian manifolds? (Conjecture: yes, at least to spheres)
Hyperbolic manifolds?
Daniel Reem (ICMC) Implicit computational geometry June 2015 39 / 41
Challenges: many!
Existence of ZD of many sites: Can it be generalized, e.g.,to
manifolds?
(Conjecture: Yes!)
non-compact world X ? (Conjecture: Yes!)
non disjoint sites? (Conjecture: Yes!)
arbitrary sites in m-spaces?
Uniqueness of ZD, k-sectors: perhaps holds if the space is:Euclidean? (Conjecture: Yes!)uniformly smooth and uniformly convex? (Conjecture: Yes!)
Riemannian manifolds? (Conjecture: yes, at least to spheres)
Hyperbolic manifolds?
Daniel Reem (ICMC) Implicit computational geometry June 2015 39 / 41

Challenges: many!
Existence of ZD of many sites: Can it be generalized, e.g.,to
manifolds? (Conjecture: Yes!)
non-compact world X ? (Conjecture: Yes!)
non disjoint sites? (Conjecture: Yes!)
arbitrary sites in m-spaces?
Uniqueness of ZD, k-sectors: perhaps holds if the space is:Euclidean? (Conjecture: Yes!)uniformly smooth and uniformly convex? (Conjecture: Yes!)
Riemannian manifolds? (Conjecture: yes, at least to spheres)
Hyperbolic manifolds?
Daniel Reem (ICMC) Implicit computational geometry June 2015 39 / 41
Challenges: many!
Existence of ZD of many sites: Can it be generalized, e.g.,to
manifolds? (Conjecture: Yes!)
non-compact world X ?
(Conjecture: Yes!)
non disjoint sites? (Conjecture: Yes!)
arbitrary sites in m-spaces?
Uniqueness of ZD, k-sectors: perhaps holds if the space is:Euclidean? (Conjecture: Yes!)uniformly smooth and uniformly convex? (Conjecture: Yes!)
Riemannian manifolds? (Conjecture: yes, at least to spheres)
Hyperbolic manifolds?
Daniel Reem (ICMC) Implicit computational geometry June 2015 39 / 41

Challenges: many!
Existence of ZD of many sites: Can it be generalized, e.g.,to
manifolds? (Conjecture: Yes!)
non-compact world X ? (Conjecture: Yes!)
non disjoint sites? (Conjecture: Yes!)
arbitrary sites in m-spaces?
Uniqueness of ZD, k-sectors: perhaps holds if the space is:Euclidean? (Conjecture: Yes!)uniformly smooth and uniformly convex? (Conjecture: Yes!)
Riemannian manifolds? (Conjecture: yes, at least to spheres)
Hyperbolic manifolds?
Daniel Reem (ICMC) Implicit computational geometry June 2015 39 / 41
Challenges: many!
Existence of ZD of many sites: Can it be generalized, e.g.,to
manifolds? (Conjecture: Yes!)
non-compact world X ? (Conjecture: Yes!)
non disjoint sites?
(Conjecture: Yes!)
arbitrary sites in m-spaces?
Uniqueness of ZD, k-sectors: perhaps holds if the space is:Euclidean? (Conjecture: Yes!)uniformly smooth and uniformly convex? (Conjecture: Yes!)
Riemannian manifolds? (Conjecture: yes, at least to spheres)
Hyperbolic manifolds?
Daniel Reem (ICMC) Implicit computational geometry June 2015 39 / 41

Challenges: many!
Existence of ZD of many sites: Can it be generalized, e.g.,to
manifolds? (Conjecture: Yes!)
non-compact world X ? (Conjecture: Yes!)
non disjoint sites? (Conjecture: Yes!)
arbitrary sites in m-spaces?
Uniqueness of ZD, k-sectors: perhaps holds if the space is:Euclidean? (Conjecture: Yes!)uniformly smooth and uniformly convex? (Conjecture: Yes!)
Riemannian manifolds? (Conjecture: yes, at least to spheres)
Hyperbolic manifolds?
Daniel Reem (ICMC) Implicit computational geometry June 2015 39 / 41

Challenges: many!
Existence of ZD of many sites: Can it be generalized, e.g.,to
manifolds? (Conjecture: Yes!)
non-compact world X ? (Conjecture: Yes!)
non disjoint sites? (Conjecture: Yes!)
arbitrary sites in m-spaces?
Uniqueness of ZD, k-sectors: perhaps holds if the space is:Euclidean? (Conjecture: Yes!)uniformly smooth and uniformly convex? (Conjecture: Yes!)
Riemannian manifolds? (Conjecture: yes, at least to spheres)
Hyperbolic manifolds?
Daniel Reem (ICMC) Implicit computational geometry June 2015 39 / 41
Challenges: many!
Existence of ZD of many sites: Can it be generalized, e.g.,to
manifolds? (Conjecture: Yes!)
non-compact world X ? (Conjecture: Yes!)
non disjoint sites? (Conjecture: Yes!)
arbitrary sites in m-spaces?
Uniqueness of ZD, k-sectors: perhaps holds if the space is:Euclidean?
(Conjecture: Yes!)uniformly smooth and uniformly convex? (Conjecture: Yes!)
Riemannian manifolds? (Conjecture: yes, at least to spheres)
Hyperbolic manifolds?
Daniel Reem (ICMC) Implicit computational geometry June 2015 39 / 41
Challenges: many!
Existence of ZD of many sites: Can it be generalized, e.g.,to
manifolds? (Conjecture: Yes!)
non-compact world X ? (Conjecture: Yes!)
non disjoint sites? (Conjecture: Yes!)
arbitrary sites in m-spaces?
Uniqueness of ZD, k-sectors: perhaps holds if the space is:Euclidean? (Conjecture: Yes!)uniformly smooth and uniformly convex?
(Conjecture: Yes!)
Riemannian manifolds? (Conjecture: yes, at least to spheres)
Hyperbolic manifolds?
Daniel Reem (ICMC) Implicit computational geometry June 2015 39 / 41

Challenges: many!
Existence of ZD of many sites: Can it be generalized, e.g.,to
manifolds? (Conjecture: Yes!)
non-compact world X ? (Conjecture: Yes!)
non disjoint sites? (Conjecture: Yes!)
arbitrary sites in m-spaces?
Uniqueness of ZD, k-sectors: perhaps holds if the space is:Euclidean? (Conjecture: Yes!)uniformly smooth and uniformly convex? (Conjecture: Yes!)
Riemannian manifolds? (Conjecture: yes, at least to spheres)
Hyperbolic manifolds?
Daniel Reem (ICMC) Implicit computational geometry June 2015 39 / 41
Challenges: many!
Existence of ZD of many sites: Can it be generalized, e.g.,to
manifolds? (Conjecture: Yes!)
non-compact world X ? (Conjecture: Yes!)
non disjoint sites? (Conjecture: Yes!)
arbitrary sites in m-spaces?
Uniqueness of ZD, k-sectors: perhaps holds if the space is:Euclidean? (Conjecture: Yes!)uniformly smooth and uniformly convex? (Conjecture: Yes!)
Riemannian manifolds? (Conjecture: yes, at least to spheres)
Hyperbolic manifolds?
Daniel Reem (ICMC) Implicit computational geometry June 2015 39 / 41

Challenges: many!
Existence of ZD of many sites: Can it be generalized, e.g.,to
manifolds? (Conjecture: Yes!)
non-compact world X ? (Conjecture: Yes!)
non disjoint sites? (Conjecture: Yes!)
arbitrary sites in m-spaces?
Uniqueness of ZD, k-sectors: perhaps holds if the space is:Euclidean? (Conjecture: Yes!)uniformly smooth and uniformly convex? (Conjecture: Yes!)
Riemannian manifolds? (Conjecture: yes, at least to spheres)
Hyperbolic manifolds?
Daniel Reem (ICMC) Implicit computational geometry June 2015 39 / 41

Open problems (Cont.)
Properties: k-sectors are usually (probabilistic arguments) nonpiecewise algebraic?
Error estimates for the approximation alg of zone and doublezone diagrams.
Improvement of some proofs
Interesting applications?
Many others
Daniel Reem (ICMC) Implicit computational geometry June 2015 40 / 41

Open problems (Cont.)
Properties: k-sectors are usually (probabilistic arguments) nonpiecewise algebraic?
Error estimates for the approximation alg of zone and doublezone diagrams.
Improvement of some proofs
Interesting applications?
Many others
Daniel Reem (ICMC) Implicit computational geometry June 2015 40 / 41
Open problems (Cont.)
Properties: k-sectors are usually (probabilistic arguments) nonpiecewise algebraic?
Error estimates for the approximation alg of zone and doublezone diagrams.
Improvement of some proofs
Interesting applications?
Many others
Daniel Reem (ICMC) Implicit computational geometry June 2015 40 / 41
Open problems (Cont.)
Properties: k-sectors are usually (probabilistic arguments) nonpiecewise algebraic?
Error estimates for the approximation alg of zone and doublezone diagrams.
Improvement of some proofs
Interesting applications?
Many others
Daniel Reem (ICMC) Implicit computational geometry June 2015 40 / 41
Open problems (Cont.)
Properties: k-sectors are usually (probabilistic arguments) nonpiecewise algebraic?
Error estimates for the approximation alg of zone and doublezone diagrams.
Improvement of some proofs
Interesting applications?
Many others
Daniel Reem (ICMC) Implicit computational geometry June 2015 40 / 41

Open problems (Cont.)
Properties: k-sectors are usually (probabilistic arguments) nonpiecewise algebraic?
Error estimates for the approximation alg of zone and doublezone diagrams.
Improvement of some proofs
Interesting applications?
Many others
Daniel Reem (ICMC) Implicit computational geometry June 2015 40 / 41

The End
The slideshow is dedicated to the memory ofJirı Matousek (1963-2015)
The slideshow and many papers can be found online
Daniel Reem (ICMC) Implicit computational geometry June 2015 41 / 41

The End
The slideshow is dedicated to the memory ofJirı Matousek (1963-2015)
The slideshow and many papers can be found online
Daniel Reem (ICMC) Implicit computational geometry June 2015 41 / 41

The End
The slideshow is dedicated to the memory ofJirı Matousek (1963-2015)
The slideshow and many papers can be found online
Daniel Reem (ICMC) Implicit computational geometry June 2015 41 / 41


















