Implementation of a modified incremental conductance MPPT ... · PDF fileImplementation of a...
13
Implementation of a modified incremental conductance MPPT algorithm with direct control based on a fuzzy duty cycle change estimator using dSPACE Tawfik Radjai a,⇑ , Lazhar Rahmani a , Saad Mekhilef b , Jean Paul Gaubert c a Universite ´ Se ´tif 1, Faculte ´ de Technologie, De ´partement d’e ´lectrotechnique, laboratoire d’automatique (LAS), Algeria b University of Malaya, Faculty of Engineering, Department of Electrical Engineering, Malaysia c Universite ´ de Poitiers, Laboratoire d’Informatique et d’Automatique pour les Syste `mes (LIAS), France Received 8 January 2014; received in revised form 9 September 2014; accepted 10 September 2014 Available online 7 October 2014 Communicated by: Associate Editor Arturo Morales-Acevedo Abstract Maximum power point tracking (MPPT) is a necessary function in all photovoltaic (PV) systems. The classic incremental conductance (IC) MPPT algorithm is widely used in the literature. However, when large changes occur in the irradiance, the performance of this algorithm is degraded. To eliminate all of the disadvantages of the classic IC algorithm, we developed a new IC controller based on a fuzzy duty cycle change estimator with direct control. A fuzzy logic estimator (FLE) is used to estimate the new duty cycle used to track the PV array maximum power point. Compared with the fixed step IC MPPT method with direct control, the proposed algorithm reaches the MPP more accurately and faster during dynamic and steady-state conditions. A controlled Cuk DC–DC converter was implemented and connected to a SunTech STP085B PV panel to verify the accuracy of the proposed method. Matlab/Simulink was used for the simulation studies. Additionally, the algorithms were digitally implemented on the dSPACE ACE1104 platform. The results obtained confirm the advantages of the proposed algorithm. Ó 2014 Elsevier Ltd. All rights reserved. Keywords: Photovoltaic; Fuzzy logic estimator; MPPT; Incremental conductance; Cuk; Fixed step 1. Introduction The petroleum crisis and the increasing demand for energy, coupled with the possibility of the reduced supply of conventional fuels, has motivated progress in renewable energy research and applications. Among renewable energy sources, solar energy is currently considered to be the most useful natural energy source because it is abundant, clean and distributed over the earth. Solar energy is a primary factor in all other processes of energy production on earth (de Brito et al., 2013). Despite these advantages, the efficiency of solar energy conversion is currently low, and the initial cost for its implementation is still considered high (de Brito et al., 2013; Fairley, 2011). The efficiency of solar cells depends on many factors, such as the temperature, insulation, the spectral character- istics of the sunlight and the presence of dirt and shadows (Bratcu et al., 2011; Jain and Agarwal, 2007; Ji et al., 2011). Rapidly changing atmospheric conditions can reduce the photovoltaic (PV) array output power. http://dx.doi.org/10.1016/j.solener.2014.09.014 0038-092X/Ó 2014 Elsevier Ltd. All rights reserved. ⇑ Corresponding author. E-mail addresses: r_toufi[email protected] (T. Radjai), lazhar_rah@yahoo. fr (L. Rahmani), [email protected] (S. Mekhilef), jean.paul.gaubert@ univ-poitiers.fr (J.P. Gaubert). www.elsevier.com/locate/solener Available online at www.sciencedirect.com ScienceDirect Solar Energy 110 (2014) 325–337
Transcript of Implementation of a modified incremental conductance MPPT ... · PDF fileImplementation of a...

Available online at www.sciencedirect.com
www.elsevier.com/locate/solener
ScienceDirect
Solar Energy 110 (2014) 325–337
Implementation of a modified incremental conductance MPPTalgorithm with direct control based on a fuzzy duty cycle change
estimator using dSPACE
Tawfik Radjai a,⇑, Lazhar Rahmani a, Saad Mekhilef b, Jean Paul Gaubert c
a Universite Setif 1, Faculte de Technologie, Departement d’electrotechnique, laboratoire d’automatique (LAS), Algeriab University of Malaya, Faculty of Engineering, Department of Electrical Engineering, Malaysia
c Universite de Poitiers, Laboratoire d’Informatique et d’Automatique pour les Systemes (LIAS), France
Received 8 January 2014; received in revised form 9 September 2014; accepted 10 September 2014Available online 7 October 2014
Communicated by: Associate Editor Arturo Morales-Acevedo
Abstract
Maximum power point tracking (MPPT) is a necessary function in all photovoltaic (PV) systems. The classic incremental conductance(IC) MPPT algorithm is widely used in the literature. However, when large changes occur in the irradiance, the performance of thisalgorithm is degraded. To eliminate all of the disadvantages of the classic IC algorithm, we developed a new IC controller based ona fuzzy duty cycle change estimator with direct control. A fuzzy logic estimator (FLE) is used to estimate the new duty cycle used totrack the PV array maximum power point. Compared with the fixed step IC MPPT method with direct control, the proposed algorithmreaches the MPP more accurately and faster during dynamic and steady-state conditions. A controlled Cuk DC–DC converter wasimplemented and connected to a SunTech STP085B PV panel to verify the accuracy of the proposed method. Matlab/Simulink was usedfor the simulation studies. Additionally, the algorithms were digitally implemented on the dSPACE ACE1104 platform. The resultsobtained confirm the advantages of the proposed algorithm.� 2014 Elsevier Ltd. All rights reserved.
Keywords: Photovoltaic; Fuzzy logic estimator; MPPT; Incremental conductance; Cuk; Fixed step
1. Introduction
The petroleum crisis and the increasing demand forenergy, coupled with the possibility of the reduced supplyof conventional fuels, has motivated progress in renewableenergy research and applications. Among renewable energysources, solar energy is currently considered to be the mostuseful natural energy source because it is abundant, clean
http://dx.doi.org/10.1016/j.solener.2014.09.014
0038-092X/� 2014 Elsevier Ltd. All rights reserved.
⇑ Corresponding author.E-mail addresses: [email protected] (T. Radjai), lazhar_rah@yahoo.
fr (L. Rahmani), [email protected] (S. Mekhilef), [email protected] (J.P. Gaubert).
and distributed over the earth. Solar energy is a primaryfactor in all other processes of energy production on earth(de Brito et al., 2013).
Despite these advantages, the efficiency of solar energyconversion is currently low, and the initial cost for itsimplementation is still considered high (de Brito et al.,2013; Fairley, 2011).
The efficiency of solar cells depends on many factors,such as the temperature, insulation, the spectral character-istics of the sunlight and the presence of dirt and shadows(Bratcu et al., 2011; Jain and Agarwal, 2007; Ji et al., 2011).Rapidly changing atmospheric conditions can reduce thephotovoltaic (PV) array output power.

326 T. Radjai et al. / Solar Energy 110 (2014) 325–337
Due to these disadvantages, the efficient design of a PVsystem is necessary. Maximum power point tracking(MPPT) is well-established algorithm in PV applicationsto extract the maximum power from the PV panel, in orderto achieve maximum power transfer on every operatingcondition the maximum power from a PV panel by achiev-ing the maximum power transfer under every operatingcondition (de Brito et al., 2013; Yu et al., 2002).
Many MPPT systems have been proposed in the litera-ture. Some of the proposed systems are simple, such asthose based on voltage and current feedback. However,these systems require periodic disconnection or short cir-cuiting of the PV modules to measure the open-circuit volt-age or the short-circuit current for reference, resulting ingreater power loss (Liu et al., 2008). Other MPPT algo-rithms are more complicated, such as the perturbationand observation (P&O) algorithm (Abdelsalam et al.,2011; Femia et al., 2005; Petrone et al., 2011; Teulingset al., 1993; Wasynczuk, 1983; Yang et al., 2010; Zegaouiet al., 2011) and the hill climbing (HC) and incrementalconductance (IC) algorithms (Kish et al., 2012; Kjaer,2012; Liu et al., 2008; Xiao and Dunford, 2004; Xuesonget al., 2010). These algorithms are widely used due to theireasy implementation and high tracking efficiency. All ofthese methods are based on the general rule that dP/dV
should be positive on the left, negative on the right andzero at the MPP. The P&O and IC methods introduce aperturbation in the operating voltage of the PV array.The hill climbing strategy introduces a perturbation inthe duty cycle of the power converter and is more attractivedue to its simplified control structure (Alajmi et al., 2011a).Faster and more accurate MPPT controllers, such as thoseusing neural network (NN) and fuzzy logic methods, havebeen developed (Ben Salah and Ouali, 2011; Chaouachiet al., 2010; Chiu, 2010; Kottas et al., 2006; Liu et al.,2013; Messai et al., 2011; Punitha et al., 2013a, 2013b;Rajesh and Mabel, 2014; Veerachary et al., 2003; Wuet al., 2000). In general, MPPT fuzzy logic controllers pro-vide good performance under varying atmospheric condi-tions and exhibit better performance than other controlmethods (Esram and Chapman, 2007). The main disadvan-tage of the fuzzy logic controllers is their reliance on thedesigner’s knowledge of the system.
The conventional IC MPPT is based on two indepen-dent control loops. The first loop uses the incrementaland instantaneous conductance to generate the error sig-nal, and the second is the closed loop with a propor-tional-integral (PI) controller to drive the error to zero(Esram and Chapman, 2007). In (Safari and Mekhilef,2011), an IC method with direct control is proposed wherethe second loop is eliminated, and the duty cycle is adjusteddirectly in the algorithm. The control loop is simplified,and the computational time for tuning the controller gainsis eliminated. The IC MPPT algorithm with direct controlis characterised by a fixed convergence step, this design isable to track the PV array maximum power, improves
the efficiency of the PV system and reduces the power lossand the cost of the system.
Despite these advantages of the fixed-step-size IC MPPTmethod with direct control, the method has the followingdisadvantages:
1. The method converges slowly to the optimal operatingpoint (when using a small step size).
2. The oscillations in the PV power around the MPP in thesteady state cause system power losses (when using alarge step size).
3. Under variable weather conditions, the operating pointdiverges from the MPP.
In this paper, a new IC MPPT algorithm is proposedusing direct control based on a fuzzy duty cycle changeestimator. We use the fuzzy logic estimator to estimatethe duty cycle change in a Cuk converter. First, the dis-advantages of the fixed step IC method with direct con-trol are investigated. Next, we proposed a new methodthat is able to exploit the benefits of fixed step IC withdirect control (Safari and Mekhilef, 2011) and eliminatesall the disadvantages mentioned above. Finally, experi-mental and simulation results are presented to demon-strate the efficiency and the stiffness of the proposedMPPT algorithm compared to the fixed step IC methodwith direct control.
2. PV panel model
The basic structural unit of a solar module is the PV cell.The equation for the model of the photovoltaic cellinvolves the relationship between the output voltage, Vcell,and the current, Icell. To increase the output power of thesystem, solar cells are generally connected in series and/or in parallel to form PV modules. The main equationfor a module’s output current is (Ismail et al., 2013).
I ¼ npIph � npIrs eðqðVþRsIÞA�k�T �ns
Þ � 1h i
� npqðV þ RsIÞ
ns � Rsh
� �ð1Þ
where Rs and Rsh are the solar cell series and shunt resis-tances, respectively; I: PV module output current; np: num-ber of cell strings connected in parallel; Iph: cellphotocurrent (proportional to the solar irradiation); Irs:cell reverse saturation current; k: Boltzmann constant; T:temperature in degrees Kelvin; V: PV module output volt-age; ns: number of PV cells connected in series; and q: elec-tron charge.
The cell photocurrent is calculated as follows:
Iph ¼ Irs þ ki T � T rð Þ½ � S100
ð2Þ
where ki: short-circuit current temperature coefficient; Tr:cell reference temperature; and S: solar irradiation in milli-watts per square centimeter.

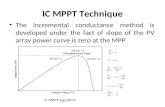
Fig. 1. (a) I–V characteristics and (b) P–V characteristics with varyingirradiation.
- ++ -
- +- -+ +
-
+
+
-
C2
IL1 IL2
L1V V0
VC1
K R
L2
Fig. 2. DC–DC Cuk converter topology.
T. Radjai et al. / Solar Energy 110 (2014) 325–337 327
A cell’s reverse saturation current is given by:
Irs ¼ IrrTT r
� �3
expq � EG
k � A1
T r� 1
T
� �� �ð3Þ
where Irr: reverse saturation at Tr; EG: band-gap energy ofthe semiconductor used in the cell; and A: dimensionlessjunction material factor.
For the simulation and the experimental setup, the Sun-Tech STP085B module was chosen. The electrical parame-ters are given in Table 1.
Fig. 1 shows the variation of the PV output current I
and the PV output power P with the PV output voltageV at different irradiation values.
3. Cuk DC–DC converter
To achieve the optimal operation of DC–DC convertertopologies at any weather condition, the load’s impedanceof buck converter should be close to but less than Ropt; atits highest. Alternatively, the impedance of the Boost con-verter should be close to but larger than Ropt. The Cuk andbuck–boost are the only ones that are able to achieve opti-mal operation regardless of the load value (Farahat et al.,2012). The Ropt is calculated according to the followingequation:
Ropt ¼V mpp
Imppð4Þ
Both the buck–boost and Cuk converters increase theoutput voltage compared to the input voltage; therefore,the output of the Cuk converter is buck–boost with polar-ity reversal. The buck–boost converter is less expensivethan the Cuk converter. However, the buck–boost con-verter has some disadvantages, such as a discontinuousinput current, high peak currents in the power componentsand a poor transient response, making it less efficient(Safari and Mekhilef, 2011). The Cuk converter has betterinput and output current characteristics as well as low rip-ples. This allows for the use of an inductor in series withboth the input and output of the switch. The Cuk converterhas been called an optimum switching power supply config-uration because it incorporates the advantages of switchingtechnology and substantially eliminates the technology’smain disadvantage, the switching of currents. Conse-quently, compared to other topologies, the Cuk converteris the ideal power supply for MPPT design.
The Cuk DC–DC converter uses a cascade combinationof Boost and buck converters. Its structure is shown inFig. 2.
Table 1Electrical Parameters of the STP085B module.
Pmax PV output power at MPP 85 WVmpp PV output voltage at MPP 17.8 VVoc Open circuit voltage 21.9 VImpp PV output current at MPP 4.83 AIsc Short circuit current 5.15 A
When the switch is OFF, the inductor currents iL1 andiL2 flow through the diode. The capacitor C1 is chargedthrough the diode by energy from both the input and L1.The current iL1 decreases because vC1 is greater than V,and the energy stored in L2 feeds the output. Therefore,iL2 also decreases.
When the switch is ON, vC1 reverse biases the diode. Theinductor currents iL1 and iL2 flow through the switch, andbecause vC1 > VO, C1 discharges through the load.
From the principles of Cuk converter operating condi-tions, the average values of the periodic inductor voltageand capacitor current waveforms are zero when the con-verter operates in the steady state (Zhang et al., 2009).
The relations between the output and input currents andvoltages are given in the following:
V 0
V¼ � D
1� D
� �ð5Þ
II0
¼ � D1� D
� �ð6Þ

Table 2Cuk components.
C1 100 lF
C2 470 lF
L1 10 mH
L2 10 mH
R Variable ORated input voltage 240 V
Rated output voltage 400 V
IGBTs and diode Is an arm of inverterSemikron
SKM50GB123D
Maximum average DCcurrent
15 A
Ripple high frequencycurrent (10 kHz)
5 A peak to peak
328 T. Radjai et al. / Solar Energy 110 (2014) 325–337
where D is the duty cycle at the steady state, V0 is the loadvoltage and I0 is the load current.
The components of the boost–buck converter are shownin Table 2.
4. Incremental conductance MPPT with direct control
As mentioned before, the classical IC algorithm has twoindependent control loops that control the MPPT. Fromthe P&O algorithm, the slope of the P–V characteristic isequal to zero at the MPP, as explained by the followingequation:
dPdV¼ 0: ð7Þ
Eq. (7) can be rewritten as:
dPdV¼ dðI � V Þ
dV¼ V � dI
dVþ I � dV
dVð8Þ
dPdV¼ V � dI
dVþ I ð9Þ
Which implies that
dIdVþ I
V¼ 0 ð10Þ
The basic idea of the incremental conductance isinspired from Eq. (10). In practical implementation, theslope of the P–V characteristic (dP/dV = 0) is rarely equalto zero at the MPP. However, this non-zero slope can bedetected by allowing a small marginal error, where thevalue of the error depends on the required sensitivity ofthe MPPT (Hussein et al., 1995).
Eq. (10) can be reformulated as follows:
dIdVþ I
V¼ eIC ð11Þ
Such that:
dIdVþ I
V¼ eIC ’ 0 at MPP ð12Þ
dIdVþ I
V¼ eIC > 0 left of MPP ð13Þ
dIdVþ I
V¼ eIC < 0 right of MPP ð14Þ
where eIC is the error between the instantaneous conduc-tance and the incremental conductance.
The value of the error eIC, is usually chosen as a con-stant based on a trial-and-error procedure (Safari andMekhilef, 2011). A large marginal error provides fasterconvergence to the MPP but produces excessive steadystate oscillation. A small marginal error produces a smallsteady state oscillation with slower convergence, whichclearly decreases efficiency. In this research work, a fuzzylogic estimator is used to estimate the optimal size of theduty cycle change from the irradiance change by minimis-ing the error between the instantaneous conductance andthe incremental conductance; a flowchart of the IC MPPTmethod with direct control is illustrated in Fig. 3.
5. Proposed method using fuzzy estimation of the duty cycle
change
The design of the proposed fuzzy estimator is basedon the incremental conductance given in Eq. (11). Theerror absolute value between the instantaneous conduc-tance and the incremental conductance, eIC, (15) is takendirectly from the IC MPPT algorithm and is used as theprimary input to the fuzzy estimator. The second input isthe previous change in the duty cycle, Dd(k � 1). Theoutput of the fuzzy estimator, Dd(kT), is sent directlyto the IC MPPT algorithm, which determines the opti-mal duty cycle of the Cuk converter. The block diagramof the PV system, along with the proposed method, isshown in Fig. 4.
jeICj ¼dIdVþ I
V
�������� ð15Þ
The inputs and the output of the fuzzy estimator includeonly three fuzzy subsets: Small (S), Medium (M) and Large(L). Consequently, there are nine rules for our fuzzy esti-mator. We use Mamdani’s method with Max–Min forfuzzy combination. The fuzzy estimator rules are basedon the following criteria:
1. When the error between the instantaneous and incre-mental conductance is large (i.e., the operating point isfar from the MPP), the change in the duty cycle mustbe large to reach the MPP quickly (which means thatDd(kT) must be large).
2. When the error between the instantaneous and incre-mental conductance is medium (i.e., the operating pointis near the MPP), a small change in the duty cycle isrequired (which means that Dd(kT) must be medium).
3. When the error between the instantaneous and incre-mental conductance is almost equal to zero (i.e., theoperating point is reached and remains near the MPP),the duty cycle is not changed (which means that Dd(kT)must be constant and very small).

Fig. 3. Flowchart of the IC method with direct control.
T. Radjai et al. / Solar Energy 110 (2014) 325–337 329
Based on these criteria, the fuzzy estimator containsnine rules, which are detailed in Fig. 5. The partitioningof the fuzzy subsets and the shapes of the membershipfunctions of the inputs and the output are shown in Fig. 6.
Defuzzification is the last step in the fuzzy estimator, inwhich the membership degrees of the fuzzy sets are inter-preted into crisp real-value outputs or specific decisions.In this work, the centre of gravity is used (Vojtas, 2001).
The result of Dd(kT) can be found as:
DdðkT Þ ¼PN
i lðDdðkT ÞiÞDdðkT ÞiPNi lðDdðkT ÞiÞ
ð16Þ
where Dd(kT) is the output of the fuzzy estimator, Dd(kT)is the centre of the Max–Min range, l is the membershipfunction and N is the maximum number of effective rules(in this case, N = 3).
The fuzzy estimator computes the desired change in theduty cycle for each weather condition, based on the errorbetween the actual conductance and the incremental con-ductance of the PV module, which is zero at the MPPand non-zero otherwise The duty cycle step size is largewhen the PV system operating point is far from theMPP, and the step size is reduced as the distance fromthe MPP decreases. Finally, when the MPP is reached,the step size is very small if the weather conditions havenot changed. Thereafter, the duty cycle step size is sentdirectly to the IC algorithm, which adjusts the optimumduty cycle.
6. Simulation results
To verify the proposed method of IC MPPT with directcontrol, a Matlab/Simulink model was designed (Fig. 6)that included one SunTech STP085B mono crystalline PV(whose specifications are listed in Table 1), the DC–DCCuk converter (whose components are shown in Table 2),and the proposed IC MPPT algorithm.
Fig. 7 shows the variation of the PV output power fortwo controllers under irradiation step change conditions:the proposed method and the fixed step IC with direct con-trol which Dd = 0.001 is the suitable step to get better per-formance at steady state and Dd = 0.005 is the suitable stepto get better performance at dynamic state. The tempera-ture is constant and equal to 25 �C, and the resistance isequal to 50 O. The irradiation is suddenly changed from0 W/m2 to 500 W/m2 at 0 s and from 500 W/m2
(Pmax = 42.5 W) to 1000 W/m2 (Pmax = 85 W) at 0.2 s.The results show clearly that the system performance
with the fuzzy estimator is much better than with the fixedstep IC with Dd = 0.001and Dd = 0.005 during both steadyand dynamic state conditions. This means that the MPP isreached rapidly and with reduced oscillation in the steadystate, which also implies greater energy generation.
To demonstrate the effectiveness of the fuzzy estimator,Fig. 8 shows the variation of the duty cycle with time forboth controllers. With the proposed method, the optimumduty cycle is reached faster and has less oscillation duringsteady state conditions than with the fixed step IC. The dis-

Fig. 4. PV system with the proposed controller with dSPACE ACE1104 platform.
if eIC is L and Δd(k-1)T is L then Δd(kT) is Lif eIC is L and Δd(k-1)T is M then Δd(kT) is Lif eIC is L and Δd(k-1)T is S then Δd(kT) is Lif eIC is M and Δd(k-1)T is L then Δd(kT) is Mif eIC is M and Δd(k-1)T is M then Δd(kT) is Mif eIC is M and Δd(k-1)T is S then Δd(kT) is Sif eIC is S and Δd(k-1)T is L then Δd(kT) is Sif eIC is S and Δd(k-1)T is M then Δd(kT) is Sif eIC is S and Δd(k-1)T is S then Δd(kT) is S
Fig. 5. Fuzzy rules of the FLE.
Small Medium Large
0 0.30.05 0.1 0.2 0.25
(a)
Small Mediu
Δd(k
T)
0 0.001(c)
|eIc
|
Fig. 6. Membership functions: (a) input eIC, (b
330 T. Radjai et al. / Solar Energy 110 (2014) 325–337
advantages of the fixed step IC with direct control areeliminated by the fuzzy estimator, in which the step sizeincreases and decreases according to the change in the errorabsolute value between the instantaneous conductance andthe incremental conductance.
To demonstrate the advantages of the proposed method,Figs. 9–11 show the inputs and output of the fuzzy estima-tor. During interval (1) (initial system operation), eIC andDd(k � 1)T are large, which forces Dd(kT) to be large
Δd(k
-1)T
(b)
m Large
0.0080.004 0.005
Small Medium Large
0 0.001 0.0080.004 0.005
) input Dd(k � 1)T and (c) output Dd(kT).

Fig. 7. PV output power: reference, proposed method and IC fixed stepcontroller with Dd = 0.005 and Dd = 0.001.
Fig. 9. The error eIC between the instantaneous conductance and theincremental conductance: proposed method and IC fixed step controllerwith Dd = 0.005 and Dd = 0.001.
T. Radjai et al. / Solar Energy 110 (2014) 325–337 331
(Dd(kT) = 0.007). During interval (2) (steady state weatherconditions), eIC and Dd(k � 1)T are very small, whichforces Dd(kT) to be small (Dd(kT) = 0.0003).
During interval (3) (varying weather conditions), eIC
increases rapidly, and Dd(kT) increases to force eIC toreturn to zero. During interval (4), eIC and Dd(k � 1)Tare large, producing a large Dd(kT). Finally, during inter-val (5), due to the large Dd(kT), eIC decreases rapidly toreach the MPP, after which Dd(kT) decreases quickly to asmall value to eliminate oscillation near the MPP.
Fig. 10. The previous duty cycle change, Dd(k � 1)T, for the fuzzyestimator in the proposed method.
6.1. Additional comparisons with other recent MPPT
algorithms
To validate the effectiveness of the proposed method, acomparison between the proposed method and four othermethods presented in recent research papers is presentedin Fig. 12.
Both methods presented in (Algazar et al., 2012) as wellas the proposed method provide a better performance atsteady state condition compared to the two methodspresented in (de Brito et al., 2013) and (Liu et al., 2008).However, in a transient state, the proposed method tracksthe MPP more quickly compared to the other three meth-ods. Moreover, in (Algazar et al., 2012), the use of errorbetween the actual conductance and incremental conduc-tance eIC as a primary input and the change in eIC as asecondary input makes the practical implementation of this
Fig. 8. Duty cycle: proposed method and IC fixed step controller withDd = 0.005 and Dd = 0.001.
Fig. 11. The actual duty cycle change, Dd(kT), for the proposed methodand the IC fixed step controller with Dd = 0.005 and Dd = 0.001.
controller difficult, especially with rapid weather change(Alajmi et al., 2011b).
Table 3 summarises the detailed comparison of the fiveMPPT algorithms. The details are:
– The tracking efficiency n, where n is calculated as:
n ¼ P PV =P MPP ð17Þ– The tracking time (tr), which is the time required to
reach the new MPP with an irradiance step change(500–1000 W/m2).

Fig. 12. Simulation results of the three existing methods as well as the proposed method.
Table 3Comparison between the proposed algorithm and other methods.
Method Efficiency Tracking time (tr) Mean square error (MSE) Practical validation
Proposed method 0.9955 0.0067 s 1.7086 YesAlgazar et al. (2012) 0.9882 0.0151 s 1.7116 Node Brito et al. (2013) 0.9855 0.0220 s 1.7236 YesLiu et al. (2008) 0.9881 0.0117 s 2.3517 YesSafari and Mekhilef (2011) 0.9821 0.0156 s 2.2223 Yes
Fig. 13. PV simulator.Fig. 14. Real PV panel.
332 T. Radjai et al. / Solar Energy 110 (2014) 325–337
– The Mean square error (MSE); the average of thesquares of the “errors”, which is the difference betweenthe reference and the actual signal where the referencein this case is zero; and the actual signal, which is theerror between the actual conductance and the incremen-tal conductance eIC.
MSE ¼ meanðð0� eIC:Þ2Þ ð18Þ
In Table 3, the proposed method has fewer fuzzy rules,which improves the tracking speed, accuracy, and smalloscillations around the MPP compared to others methods.
7. Experimental results
To test and verify the performance of the IC MPPT con-troller with direct control based on a fuzzy duty cycle

Fig. 15. Experimental results of irradiation change.
T. Radjai et al. / Solar Energy 110 (2014) 325–337 333
change estimator, several experiments were performed onexperimental prototypes designed and built in two labora-tories, using simulated and real PV panels, as illustrated inFigs. 13 and 14, respectively. A PV panel simulator wasused in the LIAS laboratory in France, where as a realPV panel was used in the LAS laboratory in Algeria.
7.1. Hardware implementation
The bench test was based on the following equipment: aprogrammable DC voltage source in series with a variableresistor to emulate three Suntech85 W panels (used in theLIAS laboratory in France) (Fig. 13), four real Sun-tech85 W panels (used in the LAS laboratory in Algeria)(Fig. 14), a Semikron DC–DC Cuk converter operatingwith a switching frequency of 10 kHz (whose specificationsare illustrated in Table 2) and a variable resistor as a load.A Hall effect CT LEM (PR30) and a HAMEG HZ64
isolation amplifier were used to detect the PV output cur-rent and PV output voltage. The algorithms were digitallyimplemented on a dSPACE ACE1104 platform with a sam-ple time of Ts = 0.08 s to emulate a DSP TMS320F240core. To facilitate the real-time analysis of the systemperformance and the visualisation of the PV output wave-forms, Control Desk was used as an acquisition manage-ment system.
7.2. Experimental results and discussion
Experimental implementation of the two controllers wasperformed under the same conditions in the two laborato-ries according to the available equipment.
7.2.1. PV simulatorIn the LIAS laboratory, a programmable DC voltage
source in series with a variable resistor was used to simulate

Table 4Digital comparison.
Algorithm Dd eIC atsteady state
Trackingtime (tr)
Ts
Proposed method Dd(kT) 0.0065 1.5 s 18.75Fixed step IC method 0.005 0.1082 02 s 25Fixed step IC method 0.001 0.0082 07 s 85.7Algazar et al. (2012) FLC 0.0095 2.2 s 27.6
Fig. 16. Experimental results of resistance change with the PV simulator.
334 T. Radjai et al. / Solar Energy 110 (2014) 325–337
the PV panels (Suntech85 W) (Fig. 13). In the first test, theresistance was fixed at 30 O and the temperature was set to25 �C. The irradiance was changed from 0 W/m2 to500 W/m2 at 0.4 s and decreased from 500 W/m2 to1000 W/m2 at 28 s. The output waveforms of the PV fromthe experimental results of both algorithms are shown inFig. 15. The results show that the proposed method providesa good performance in both the steady and dynamic states;the maximum power (Pmax = 255 W at 1000 W/m2) isreached within a short time (tr = 1.5 s), and the oscillationsaround the MPP are very small (Fig. 15a). The PV outputcurrent and voltage waveforms from the proposed controllerare shown in Fig. 15b. Using the fixed step IC controller(Dd = 0.005), maximum power is reached within (tr = 2 s)and has significant oscillations (up to 7 W). The correspond-ing PV output current and voltage waveforms are shown inFig. 15c. When Dd is equal to 0.001, the oscillations aroundthe MPP are small but remain larger than in the proposedmethod, and maximum power is reached within (tr = 7 s).Fig. 15d shows the corresponding PV output current andvoltage waveforms. In the method presented in (Algazaret al., 2012), the oscillations around the MPP are moderate,and maximum power is reached within (tr = 2.2 s). Fig. 15eshows the corresponding PV output current and voltagewaveforms. The proposed controller tracks the MPP fasterthan both the fixed step IC controller with Dd = 0.005 andthe method presented in (Algazar et al., 2012). It also main-tains smaller oscillations than the fixed step IC controllerwith Dd = 0.001 after reaching steady state conditions. Adetailed comparison is shown in Table 4.
In the second test, we fixed the irradiance at 1000 W/m2
and the temperature at 25 �C while the resistance was chan-ged from 50 O to 25 O and from 25 O to 50 O. Fig. 16shows the experimental results of the resistance changefor the proposed controller and the fixed step IC controllerwith Dd = 0.005. Fig. 16a and b represent the PV outputpower and duty cycle waveforms, respectively, under thechange of the resistance from 50 O to 25 O. Fig. 16c andd represent the same waveforms under the change of theresistance from 25 O to 50 O. Unlike the conventional IC,the proposed technique is not significantly affected by theload variation because the fuzzy estimator quickly adaptsthe optimum duty cycle. The conventional IC tracks thenew optimum duty cycle with an overshoot and a delayin the dynamic state and with larger oscillations duringthe steady state than the proposed method.
7.2.2. Real PV panel
In the LAS laboratory (Algeria), a system of three PVsolar panels (Suntech-85 W) was implemented as shownin Fig. 13, using the parameters listed in Table 1. To

Fig. 17. IC experimental results with real PV panels (1000 s) (01-07-2013).
Fig. 18. Experimental results of resistance change with real PV panels.
Fig. 19. Real PV panel with shadow.
T. Radjai et al. / Solar Energy 110 (2014) 325–337 335
confirm that the PV system operated at the maximumpower point, we linearly varied the duty cycle from 0 to 1.
To analyse the operation of the proposed control systemunder real climate conditions, three tests were performed.
� First test: operation for 16 min (01-07-2013, 12:00–12:16 pm and 12:20–12:36 pm) for the proposed control-ler and the fixed step IC controller with Dd = 0.005respectively.� Second test: sudden change in resistance from 50 O to
5 O in both the proposed controller and the fixed stepIC controller with Dd = 0.001.� Third test: operation under partial shadow conditions.
In the first test, the operation of two controllers, the pro-posed controller and the fixed step controller using the samestep used by the FLE at dynamic state conditions, was com-pared for 16 min under the same real climatic conditions.The experimental PV output power and duty cycle are shownin Fig. 17a and b, respectively. The results show clearly thatthe proposed method tracks faster and better (Pmax = 200W) than the fixed step IC method (Pmax = 193 W).
In the second test, a system of four PV solar panels wasused as the resistance was changed suddenly from 50 O to5 O. The PV output power and duty cycle results are shownin Fig. 18a and b, respectively. The proposed technique isnot significantly affected by the resistance variation. How-
ever, the fixed step IC, using the same step size as the FLEat steady state conditions, tracks the new optimum dutycycle in the wrong direction before correcting the direction.
The third test demonstrated the operation of the pro-posed method under partial shading conditions, in whichmultiple maxima exist in the PV power characteristics.To simulate this shading effect, we covered part of onepanel as shown in Fig. 19. Due to the large change in theduty cycle, the first maximum power point is ignored tosearch for the global maximum, as shown in Fig. 20. Theresult shows that the proposed method can detect andreach the global maximum, with small oscillations, underpartial shading.

Fig. 20. Experimental results from the proposed controller under partialshading conditions.
336 T. Radjai et al. / Solar Energy 110 (2014) 325–337
8. Conclusion
This paper presents a new IC MPPT algorithm withdirect control based on a fuzzy duty cycle change estima-tor. The design of the proposed controller is based on theelimination of the error between the instantaneous conduc-tance and the incremental conductance. This error is usedto estimate the desired duty cycle change in the IC MPPTby the fuzzy logic estimator, which is able to exploit thebenefits of IC with direct control with a fixed step. Thismethod is able to improve not only the steady and dynamicstates but also the designed efficiency. Several significantsimulation and experimental results were obtained usingMatlab/Simulink and the dSPACE ACE1104 platform.The results prove that with a well-designed and efficientcontroller and a DC–DC Cuk converter, all the disadvan-tages of the conventional IC controller mentioned in sec-tion one are eliminated.
References
Abdelsalam, A.K., Massoud, A.M., Ahmed, S., Enjeti, P., 2011. High-performance adaptive perturb and observe MPPT technique forphotovoltaic-based microgrids. IEEE Trans. Power Electron. 26,1010–1021. http://dx.doi.org/10.1109/TPEL.2011.2106221.
Alajmi, B.N., Ahmed, K.H., Finney, S.J., Williams, B.W., 2011a. Fuzzy-logic-control approach of a modified hill-climbing method for max-imum power point in microgrid standalone photovoltaic system. IEEETrans. Power Electron. 26, 1022–1030. http://dx.doi.org/10.1109/TPEL.2010.2090903.
Algazar, M.M., AL-monier, Hamdy, EL-halim, H.A., Salem, M.E.E.K.,2012. Maximum power point tracking using fuzzy logic control. Int. J.Electr. Power Energy Syst. 39, 21–28. http://dx.doi.org/10.1016/j.ijepes.2011.12.006.
Ben Salah, C., Ouali, M., 2011. Comparison of fuzzy logic and neuralnetwork in maximum power point tracker for PV systems. Electr.Power Syst. Res. 81, 43–50. http://dx.doi.org/10.1016/j.epsr.2010.07.005.
Bratcu, A.I., Munteanu, I., Bacha, S., Picault, D., Raison, B., 2011.Cascaded DC–DC converter photovoltaic systems: power optimiza-tion issues. IEEE Trans. Ind. Electron. 58, 403–411. http://dx.doi.org/10.1109/TIE.2010.2043041.
Chaouachi, A., Kamel, R.M., Nagasaka, K., 2010. A novel multi-modelneuro-fuzzy-based MPPT for three-phase grid-connected photovoltaic
system. Sol. Energy 84, 2219–2229. http://dx.doi.org/10.1016/j.solener.2010.08.004.
Chiu, C.-S., 2010. T-S fuzzy maximum power point tracking control ofsolar power generation systems. IEEE Trans. Energy Convers. 25,1123–1132. http://dx.doi.org/10.1109/TEC.2010.2041551.
De Brito, M.A.G., Galotto, L., Sampaio, L.P., de Azevedo e Melo, G.,Canesin, C.A., 2013. Evaluation of the main MPPT techniques forphotovoltaic applications. IEEE Trans. Ind. Electron. 60, 1156–1167.http://dx.doi.org/10.1109/TIE.2012.2198036.
Esram, T., Chapman, P.L., 2007. Comparison of photovoltaic arraymaximum power point tracking techniques. IEEE Trans. EnergyConvers. 22, 439–449. http://dx.doi.org/10.1109/TEC.2006.874230.
Fairley, P., 2011. Fukushima’s positive impact [spectral lines]. IEEESpectrum 48, 8. http://dx.doi.org/10.1109/MSPEC.2011.5753224.
Femia, N., Petrone, G., Spagnuolo, G., Vitelli, M., 2005. Optimization ofperturb and observe maximum power point tracking method. IEEETrans. Power Electron. 20, 963–973. http://dx.doi.org/10.1109/TPEL.2005.850975.
Hussein, K.H., Muta, I., Hoshino, T., Osakada, M., 1995. Maximumphotovoltaic power tracking: an algorithm for rapidly changingatmospheric conditions. Generat. Transm. Distrib. IEE Proc. 142,59–64. http://dx.doi.org/10.1049/ip-gtd:19951577.
Ismail, M.S., Moghavvemi, M., Mahlia, T.M.I., 2013. Characterization ofPV panel and global optimization of its model parameters usinggenetic algorithm. Energy Convers. Manage. 73, 10–25. http://dx.doi.org/10.1016/j.enconman.2013.03.033.
Jain, S., Agarwal, V., 2007. A single-stage grid connected invertertopology for solar PV systems with maximum power point tracking.IEEE Trans. Power Electron. 22, 1928–1940. http://dx.doi.org/10.1109/TPEL.2007.904202.
Ji, Y.-H., Jung, D.-Y., Kim, J.-G., Kim, J.-H., Lee, T.-W., Won, C.-Y.,2011. A real maximum power point tracking method for mismatchingcompensation in PV array under partially shaded conditions. IEEETrans. Power Electron. 26, 1001–1009. http://dx.doi.org/10.1109/TPEL.2010.2089537.
Kish, G.J., Lee, J.J., Lehn, P.W., 2012. Modelling and control ofphotovoltaic panels utilising the incremental conductance method formaximum power point tracking. IET Renew. Power Generat. 6, 259–266. http://dx.doi.org/10.1049/iet-rpg.2011.0052.
Kjaer, S.B., 2012. Evaluation of the “hill climbing” and the “incrementalconductance” maximum power point trackers for photovoltaic powersystems. IEEE Trans. Energy Convers. 27, 922–929. http://dx.doi.org/10.1109/TEC.2012.2218816.
Kottas, T.L., Boutalis, Y.S., Karlis, A.D., 2006. New maximum powerpoint tracker for PV arrays using fuzzy controller in close cooperationwith fuzzy cognitive networks. IEEE Trans. Energy Convers. 21, 793–803. http://dx.doi.org/10.1109/TEC.2006.875430.
Liu, F., Duan, S., Liu, F., Liu, B., Kang, Y., 2008. A variable step sizeINC MPPT method for PV systems. IEEE Trans. Ind. Electron. 55,2622–2628. http://dx.doi.org/10.1109/TIE.2008.920550.
Liu, Y.-H., Liu, C.-L., Huang, J.-W., Chen, J.-H., 2013. Neural-network-based maximum power point tracking methods for photovoltaicsystems operating under fast changing environments. Sol. Energy 89,42–53. http://dx.doi.org/10.1016/j.solener.2012.11.017.
Messai, A., Mellit, A., Guessoum, A., Kalogirou, S.A., 2011. Maximumpower point tracking using a GA optimized fuzzy logic controller andits FPGA implementation. Sol. Energy 85, 265–277. http://dx.doi.org/10.1016/j.solener.2010.12.004.
Farahat, M.A., Metwally, H.M.B., Abd-Elfatah Mohamed, Ahmed, 2012.Optimal choice and design of different topologies of DC–DC converterused in PV systems, at different climatic conditions in Egypt. Renew.Energy 43, 393–402. http://dx.doi.org/10.1016/j.renene.2011.10.021.
Petrone, G., Spagnuolo, G., Vitelli, M., 2011. A multivariable perturb-and-observe maximum power point tracking technique applied to asingle-stage photovoltaic inverter. IEEE Trans. Ind. Electron. 58, 76–84. http://dx.doi.org/10.1109/TIE.2010.2044734.
Punitha, K., Devaraj, D., Sakthivel, S., 2013a. Artificial neural networkbased modified incremental conductance algorithm for maximum

T. Radjai et al. / Solar Energy 110 (2014) 325–337 337
power point tracking in photovoltaic system under partial shadingconditions. Energy 62, 330–340. http://dx.doi.org/10.1016/j.energy.2013.08.022.
Punitha, K., Devaraj, D., Sakthivel, S., 2013b. Development and analysisof adaptive fuzzy controllers for photovoltaic system under varyingatmospheric and partial shading condition. Appl. Soft Comput. 13,4320–4332. http://dx.doi.org/10.1016/j.asoc.2013.06.021.
Rajesh, R., Mabel, M.C., 2014. Efficiency analysis of a multi-fuzzy logiccontroller for the determination of operating points in a PV system.Sol. Energy 99, 77–87. http://dx.doi.org/10.1016/j.solener.2013.10.036.
Safari, A., Mekhilef, S., 2011. Simulation and hardware implementationof incremental conductance MPPT with direct control method usingCuk converter. IEEE Trans. Ind. Electron. 58, 1154–1161. http://dx.doi.org/10.1109/TIE.2010.2048834.
Teulings, W.J.A., Marpinard, J.-C., Capel, A., O’Sullivan, D., 1993. Anew maximum power point tracking system. In: 24th Annual IEEEPower Electronics Specialists Conference, 1993. PESC ‘93 Record.Presented at the, 24th Annual IEEE Power Electronics SpecialistsConference, 1993. PESC ‘93 Record, pp. 833–838. http://dx.doi.org/10.1109/PESC.1993.472018.
Veerachary, M., Senjyu, T., Uezato, K., 2003. Neural-network-basedmaximum-power-point tracking of coupled-inductor interleaved-boost-converter-supplied PV system using fuzzy controller. IEEETrans. Ind. Electron. 50, 749–758. http://dx.doi.org/10.1109/TIE.2003.814762.
Vojtas, P., 2001. Fuzzy logic programming. Fuzzy Sets Syst., Fuzzy Logic124, 361–370. http://dx.doi.org/10.1016/S0165-0114(01)00106-3.
Wasynczuk, O., 1983. Dynamic behavior of a class of photovoltaic powersystems. IEEE Power Eng. Rev. PER-3, 36–37. http://dx.doi.org/10.1109/MPER.1983.5519293.
Wu, T.-F., Chang, C.-H., Chen, Y.-K., 2000. A fuzzy-logic-controlledsingle-stage converter for PV-powered lighting system applications.IEEE Trans. Ind. Electron. 47, 287–296. http://dx.doi.org/10.1109/41.836344.
Xiao, W., Dunford, W.G., 2004. A modified adaptive hill climbing MPPTmethod for photovoltaic power systems. In: Power ElectronicsSpecialists Conference, 2004. PESC 04. 2004 IEEE 35th Annual.Presented at the Power Electronics Specialists Conference, 2004. PESC04. 2004 IEEE 35th Annual, vol. 3, pp. 1957–1963. http://dx.doi.org/10.1109/PESC.2004.1355417.
Xuesong, Z., Daichun, S., Youjie, M., Deshu, C., 2010. The simulationand design for MPPT of PV system based on incremental conductancemethod. In: 2010 WASE International Conference on InformationEngineering (ICIE). Presented at the 2010 WASE InternationalConference on Information Engineering (ICIE), pp. 314–317. doi:10.1109/ICIE.2010.170.
Yang, B., Li, W., Zhao, Y., He, X., 2010. Design and analysis of a grid-connected photovoltaic power system. IEEE Trans. Power Electron.25, 992–1000. http://dx.doi.org/10.1109/TPEL.2009.2036432.
Yu, G.J., Jung, Y.S., Choi, J.Y., Choy, I., Song, J.-H., Kim, G.S., 2002. Anovel two-mode MPPT control algorithm based on comparative studyof existing algorithms. In: Conference Record of the Twenty-NinthIEEE Photovoltaic Specialists Conference, 2002. Presented at theConference Record of the Twenty-Ninth IEEE Photovoltaic Special-ists Conference, 2002, pp. 1531–1534. http://dx.doi.org/10.1109/PVSC.2002.1190903.
Zegaoui, A., Aillerie, M., Petit, P., Sawicki, J.P., Charles, J.P., Belarbi,A.W., 2011. Dynamic behaviour of PV generator trackers underirradiation and temperature changes. Sol. Energy 85, 2953–2964.http://dx.doi.org/10.1016/j.solener.2011.08.038.
Zhang, C., Zhao, D., Wang, J., Chen, G., 2009. A modified MPPTmethod with variable perturbation step for photovoltaic system. In:Power Electronics and Motion Control Conference, 2009. IPEMC ’09.IEEE 6th International. Presented at the Power Electronics andMotion Control Conference, 2009. IPEMC ’09. IEEE 6thInternational, pp. 2096–2099. http://dx.doi.org/10.1109/IPEMC.2009.5157744.